Centro Estadual de Educação Tecnológica Paula Souza GOVERNO DO ESTADO DE SÃO PAULO ETEC Jorge Street TRABALHO DE CONCLUSÃO DO CURSO TÉCNICO EM MECATRÔNICA ARR – AUTO- REGULADOR DE ROTAÇÃO BRUNO GOMES DA SILVA FELIPE ALBERTO DE FRANÇA LEITE GABRIEL RODRIGUES DA SILVA HENRIQUE ROMERA SALVADOR TIAGO TAKESHI GOTO OKIMURA Professor Orientador: VINICIUS VONO PERUZZI São Caetano do Sul / SP 2014 ARR – AUTO-REGULADOR DE ROTAÇÃO Trabalho de Conclusão de Curso apresentado como pré-requisito para obtenção do Diploma de Técnico em Mecatrônica. São Caetano do Sul / SP 2014 DEDICATÓRIA Dedicamos este trabalho aos nossos familiares e amigos, por estarem conosco sempre com paciência, e aos nossos professores Salomão, Filliputti e Vinicius por terem nos ajudado com as dificuldades observadas a partir da execução deste projeto. Obrigado por não terem nos abandonado, este projeto não seria possível sem vocês. AGRADECIMENTOS Agradecemos primeiramente aos nossos familiares por estarem sempre presentes e nos apoiando e incentivando em todos os momentos. Agradecemos também a todos os nossos professores que se empenharam em nos transmitir os conhecimentos necessários para a realização deste trabalho, e aos nossos amigos por estarem sempre ao nosso lado e nos ajudando quando necessário. Este projeto não representa apenas uma conclusão de curso, e sim o amadurecimento pessoal e profissional de cada um de nós, demonstrando o que somos e mostrando-nos que podemos sempre mais. “Nunca ande pelo caminho traçado, pois ele conduz somente até onde os outros já foram.” Alexander Graham Bell RESUMO O projeto consiste em um sistema de controle de malha fechada que tem por finalidade analisar a temperatura e alterar a quantidade de tensão que será entregue ao ventilador que deverá ser conectado a esse sistema pela tomada. O sistema é alimentado com 127 V alternados, encontrados nas residências, e um circuito de transformação e retificação alimentará o controlador e este atuará nos sistemas de controle. Um relé ligará o ventilador enquanto um Dimmer de potência fará a alteração da tensão. O sistema pode ser ativado e controlado através do celular, de acordo com a vontade do usuário Palavras-Chave: Transformador; Bluetooth; Temperatura; Rotação. LISTA DE FIGURAS Figura 1 – Diagrama de Blocos................................................................. 13 Figura 2 – Exemplo de escalonamento e linearidade da potência............ 15 Figura 3 – Esquema do chaveamento de rotação do motor...................... 15 Figura 4 – Transformador 1 A 12+12......................................................... 16 Figura 5 – Esquema elétrico de uma ponte de diodos com 18 transformador........................................................................... Figura 6 – Diferença entre entrada e saída............................................... 19 Figura 7 – Símbolo de alguns tipos de capacitores................................. 20 Figura 8 – Invólucro TO220 do 7800......................................................... 21 Figura 9 – BlackBoard da RoboCore......................................................... 23 Figura 10 – Pinagem do Microcontrolador Arduíno.................................... 24 Figura 11 – Circuito Dimmer........................................................................ 26 Figura 12 – Análise de falhas do FMEA com base no gráfico 34 disponibilizado pela Siqueira Campos.................................... Figura 13 – Correção das falhas do FMEA com base no gráfico 34 disponibilizado pela Siqueira Campos..................................... Figura 14 – Diagrama de Blocos................................................................. 36 Figura 15 – Esquema Elétrico para o Circuito de Alimentação................... 37 Figura 16 – Circuito do Módulo Relê........................................................... 39 Figura 17 – Circuito Dimmer........................................................................ 40 Figura 18 – Disparo em diferentes ângulos da rede................................... 41 Figura 19 – Diagrama de Blocos com Sistema Elétrico Integrado.............. 44 Figura 20 – Fluxograma de Programação................................................... 49 Figura 21 – Vista superior da caixa de proteção......................................... 61 Figura 22 – Vista lateral da caixa de proteção............................................. 61 Figura 23 – Vista isométrica da caixa com o circuito interno....................... 62 Figura 24 – Vista superior da caixa com o circuito interno.......................... 62 LISTA DE TABELAS Tabela 1 – Tabela de pinagem do Microcontrolador Atmega328.............. 25 Tabela 2 – Cronograma Inicial do Projeto................................................. 33 Tabela 3 – Legenda do Circuito de Alimentação....................................... 37 Tabela 4 – Legenda do Circuito do Módulo Relê...................................... 40 Tabela 5 – Circuitos e suas ligações no Arduíno...................................... 43 Tabela 6 – 1ª parte do Orçamento de Eletrônica...................................... 45 Tabela 7 – 2ª parte do Orçamento de Eletrônica...................................... 46 Tabela 8 – Legenda do Fluxograma de Programação.............................. 49 Tabela 9 – Dimensões da caixa de proteção............................................ 51 Tabela 10 – Orçamento dos Materiais Mecânicos...................................... 52 Tabela 11 – Custos de componentes eletrônicos comprados no bazar...... 54 Tabela 12 – Custos de componentes eletrônicos comprados em diversos 54 locais........................................................................................ Tabela 13 – Componentes adquiridos pós-planejamento........................... 58 LISTA DE SIGLAS ARR – Auto-Regulador de Rotação ABNT – Associação Brasileira de Normas Técnicas FMEA – Failure Mode and Effect Analysis (Análise de Efeitos e Modo de Falha) CI – Circuitos Integrados Sumário INTRODUÇÃO..................................................................................................................... 12 CAPÍTULO 1 – FUNDAMENTAÇÃO TEÓRICA ................................................................... 14 1.1. Ventilador ....................................................................................................... 14 1.2. Circuito de Alimentação .................................................................................. 16 1.2.1. Transformador ............................................................................................................. 17 1.2.2. Diodo ........................................................................................................................... 18 1.2.3. Capacitores ................................................................................................................. 20 1.2.4. Reguladores de tensão ............................................................................................... 21 1.3. Circuito de Controle ........................................................................................ 22 1.3.1. Atmega328 .................................................................................................................. 22 1.3.2. Relê ............................................................................................................................. 26 1.4. Circuito de Entrada ......................................................................................... 28 1.4.1. Módulo Bluetooth ........................................................................................................ 28 1.4.2. Sensor Térmico - LM35 ............................................................................................... 29 1.5. Caixa de Proteção .......................................................................................... 30 1.5.1. Poliestireno Cristal ...................................................................................................... 31 1.5.2. Cola ............................................................................................................................. 31 CAPÍTULO 2 – PLANEJAMENTO DO PROJETO ............................................................... 32 2.1. Eletroeletrônica .................................................................................................. 35 Circuito de Alimentação ....................................................................................................... 36 Circuito de Entrada .............................................................................................................. 37 Circuito de Controle ............................................................................................................. 38 Esquema Elétrico Completo ................................................................................................ 42 2.1.1. Previsão de Custos............................................................................................................. 43 2.1. Programação .................................................................................................. 45 2.2. Mecânica ........................................................................................................ 49 2.2.1. Previsão de Custos ..................................................................................................... 49 CAPÍTULO 3 – DESENVOLVIMENTO DO PROJETO......................................................... 51 3.1. Eletroeletrônica ............................................................................................... 51 3.1.1. 3.2. Definição das Tarefas ................................................................................................. 51 Mecânica ........................................................................................................ 56 RESULTADOS OBTIDOS.................................................................................................... 57 CONCLUSÃO ...................................................................................................................... 60 REFERÊNCIAS BIBLIOGRÁFICAS ..................................................................................... 61 ANEXOS.............................................................................................................................. 63 INTRODUÇÃO Graças ao surgimento do ventilador no final do século XIX, houve grandes desenvolvimentos no campo elétrico e aeronáutico das engenharias, pois estes partiam dos mesmos princípios presentes nesses dispositivos. Os ventiladores passaram por muitas modificações, começando por motores bipolares de corrente contínua, além de componentes expostos, até a adição de proteção através de gaiolas, motores de corrente alternada e principalmente a alteração para componentes plásticos ao invés de lâminas metálicas. Atualmente, existe o Ar Condicionado, criado com o intuito de substituir o ventilador no setor industrial, mas é também utilizado em residências, comércios e instituições de ensino devido à sua característica de resfriar todo o ambiente de acordo com uma temperatura pré-estabelecida. Com o surgimento desses aparelhos os ventiladores começaram a ser substituídos por sua falta de praticidade, já que toda vez que se desejasse alterar sua temperatura deveria-se ir até o local, muitas vezes de difícil acesso como em indústrias e escolher entre as comuns três opções de variação de temperatura, podendo ou não satisfazer a vontade do cliente. O projeto a ser abordado neste Trabalho de Conclusão de Curso visa aumentar a praticidade e eficiência dos ventiladores, pois se trataria de uma forma de diminuir essa carência de variações de temperatura. Para isso, foi projetado um módulo de controle para a rotação de um ventilador, que funcionaria de acordo com a temperatura do ambiente e podendo ser controlada a distância pelo usuário através de seu Smartphone. O Ar Condicionado, mesmo que difundido em todo o planeta ainda apresenta altos preços, e este projeto viabilizaria a utilização de ventiladores ao invés de tais aparelhos, já que este módulo permitiria a utilização de qualquer modelo de ventilador para ter sua potência controlada, fazendo assim com que o projeto se torne uma espécie de adaptador universal para ventiladores. O ARR, sigla para Auto-Regulador de Rotação, designação dada ao projeto pelo grupo de execução, teria como objetivos a aplicação dos conhecimentos absorvidos durante o curso de Mecatrônica, além de identificar as ferramentas necessárias para o planejamento e execução de projetos e estudar sistemas de 12 controles muito utilizados atualmente. Podemos também especificar os objetivos a serem almejados com a construção do projeto: Tornar um dispositivo de controle em um módulo universal; Difundir o uso de Smartphones em sistemas de controle; Aplicar conceitos de Automação Mecatrônica ao implantar um sistema de malha fechada; Abordar os conceitos de controle de potência através da variação de tensão recebida da rede elétrica; Utilizar conceitos de usinagem e mecânica aos processos plásticos. Para se alcançar tais metas serão necessários planejamentos envolvendo pesquisas sobre os componentes e viabilidades do processo, além de projetar os circuitos eletroeletrônicos, a usinagem da caixa de proteção e o fluxograma de programação. A execução será baseada em tais apontamentos, confeccionando a caixa a partir de um material plástico, escrevendo as linhas de programação em linguagem própria da plataforma de microcontroladores a ser utilizada e solda dos componentes e suas ligações eletroeletrônicas. Abaixo segue um diagrama de blocos introduzindo a estrutura do circuito completo: Figura 1: Diagrama de Blocos Fonte: Autores (2014) 13 Capítulo 1 – Fundamentação Teórica Como o projeto consiste no aprimoramento do sistema de variação de rotação de qualquer ventilador que for conectado ao módulo, este capítulo abordará os conceitos de funcionamento dos ventiladores. Além disso, seguirá a especificação de cada aparelho, dispositivo e componente estabelecido através de pesquisas e que serão utilizados no projeto para atingir os objetivos impostos ao módulo de controle. 1.1. Ventilador Um ventilador é um dispositivo mecânico utilizado para converter energia elétrica em energia mecânica de rotação em seu eixo, aplicando essa força ao ambiente, resfriando o ar. O ventilador nada mais é do que um modelo de moinho invertido, que ao invés de transformar a energia do vento em mecânica, faz o contrário. Este equipamento foi inventado nos EUA em 1882, pelo americano Schuyler S. Wheeler. Existem ventiladores de diversos tipos, como os compressores rotativos, que comprimem o ar a altas pressões, os ionizadores e os de torre convencionais, mas são basicamente dois tipos, os axiais e os centrífugos. É comum se encontrar diversos modelos tendo como característica a rotação de sua base, mas alguns têm uma varredura maior. Existem também ventiladores com rotações muito altas que são utilizados em túneis de experiências aerodinâmicas, onde são testados modelos de aviões. Um ventilador funciona a partir de um rotor que move o ar através de um eixo. O rotor do ventilador fica normalmente abrigado dentro de um recipiente cilíndrico, onde ficam aplicadas as pás do rotor, que se movem ao seu redor. Os ventiladores comuns movimentam o ar no sentido horizontal, mas existem alguns que circulam o vento para cima e para baixo. O ventilador contém um rotor que move o ar através de um eixo. Este aparelho pode ser utilizado tanto no ambiente residencial quanto no industrial. Na maioria dos casos são utilizados para diminuir o calor do ambiente e aumentar a circulação do ar. Sua função de conduzir o ar de um ponto a outro se 14 torna indispensável para locais muito quentes ou com pouca circulação natural de ar. São também amplamente usados em ambientes de trabalho, setores com temperatura muito alta, elétricos, ou até em locais específicos como uma de suas variações, os coolers de computador, exaustores de restaurantes, nos radiadores, entre muitas outras aplicações. Um dos maiores problemas de ventiladores domésticos e comerciais é que o controle da rotação é feita de maneira escalonada, aos saltos, nem sempre convencional, pois de uma maneira bem clara, não existe meio termo entre o muito forte e o fraco. Esta deficiência leva à idéia de se ter um controle contínuo e automático, ajustando a rotação à temperatura ambiente de maneira linear. Figura 2: Exemplo de escalonamento e linearidade da potência Fonte: Site: www.mecatronicaatual.com.br Os ventiladores comuns têm um controle de velocidade de acordo com o princípio de comutação entre os três enrolamentos no motor, quando uma chave seleciona a velocidade de acordo com a tomada ligada ao motor, variando de maneira escalonada a rotação. 15 Figura 3: Esquema do chaveamento de rotação do motor. Fonte: Site: www.mecatronicaatual.com.br É por esse motivo que será projetado um sistema de controle que fará as alterações utilizando sempre o 3° enrolamento do motor, variando assim a entre a menor velocidade do motor, de acordo com a menor tensão e a maior rotação de acordo com a maior tensão elétrica. 1.2. Circuito de Alimentação O projeto será alimentado pela rede elétrica convencional fornecida no estado de São Paulo, pela fornecedora Eletropaulo que disponibiliza no sistema monofásico 127 V alternados e no sistema bifásico 220 V alternados. O circuito de alimentação foi projetado para o sistema monofásico, pois a maioria dos ventiladores é alimentada por 127 V. Este circuito tem como objetivo criar uma fonte 5 V utilizando, um cabo qualquer com conexão para tomada elétrica, transformador 220 e 110 Vac/12+12VCA, diodos retificadores 1N4007, Capacitor 1000uF 40V, regulador de Tensão 7805. Com o transformador receberemos o sinal da rede elétrica e transformaremos em 12 Vac. Com isso, iremos retificar o sinal utilizando uma ponte de diodos e com o conjunto de 1 resistor e 1 capacitor obter um sinal praticamente retificado, isto é, na eletrônica um sinal de ondas totalmente positivas ou totalmente negativas. O regulador de tensão funciona como um transformador para tensão contínua, ele receberá 12 V na entrada e irá por 5 V na saída. 16 Será visto a seguir a fundamentação teórica de cada componente e no Segundo capítulo será abordado o circuito completo com seu funcionamento, especificações e sua montagem. 1.2.1. Transformador Em diversas instalações elétricas e até mesmo em nossas casas, se tem a necessidade de aumentar ou diminuir a voltagem que é fornecida pelas companhias de eletricidade. Para resolver este problema foi criado o transformador. O transformador é constituído de uma peça de ferro denominada de núcleo, e ao seu redor são enroladas duas bobinas. Em uma dessas bobinas é aplicada a voltagem que queremos transformar, a esta bobina denominamos enrolamento primário do transformador.Após a transformação, a voltagem, será estabelecida nas extremidades da outra bobina, chamada de enrolamento secundário do transformador. O transformador funciona de acordo com os princípios da indução eletromagnética, onde uma tensão aplicada nos pólos do enrolamento primário cria um campo magnético imantando o núcleo e formando linhas de indução que quando passam através da bobina do secundário criam outro campo magnético na bobina, gerando a tensão de saída. Quando essa tensão de entrada aplicada no primário é constante, o fluxo magnético no secundário também será constante, não havendo então indução e assim não haverá voltagem induzida. Quando a voltagem aplicada no primário é alternada, o fluxo magnético se torna variável e atravessa as espiras do secundário, fazendo com que uma voltagem induzida apareça nos extremos dessa bobina. O transformador utilizado poderia ser utilizado tanto numa rede elétrica de 127 V quanto 220 V alternados, como mostra a figura a seguir, mas será utilizado apenas em 127 V alternados. A saída tem dois fios de 12 V e um de 0 V, onde utilizaremos os dois fios de 12 V para alimentar o circuito, pois quanto maior a tensão (desde que seja suportável) para o regulador de tensão, mais estável será a saída. Segue em anexo no final deste trabalho a folha de especificações do transformador utilizado (Anexo A). 17 Figura 4: Transformador 1A 12 +12 V Fonte: Transformadores Esteves Embora o transformador reduza a voltagem de 127 V para 12 V, a tensão continua sendo alternada, mantendo picos entre positivo e negativo. O próximo passo é fazer a oscilação do sinal se tornar positiva, mesmo que mantenha picos. Para isso será necessária uma ponte de diodos, explicada a seguir. 1.2.2. Diodo O diodo semicondutor é um componente eletrônico composto por cristais semicondutores, normalmente silício ou germânio, sendo o tipo mais comum de semicondutor, usado muitas vezes como retificador de corrente elétrica. O funcionamento de um diodo consiste na permissão de passagem da corrente elétrica em um único sentido, a polarização direta, que é quando um diodo, conectado a uma bateria e uma lâmpada, é ligado com seu Anodo ao positivo e o Catodo ao negativo. Existe passagem de corrente e por isso a lâmpada acenderá. Quando um diodo é conectado em uma lâmpada com a polaridade inversa, não existe passagem de corrente e a lâmpada permanece apagada. O diodo funciona como uma chave, mas diferente de uma chave mecânica, o diodo possui uma queda de tensão, isto é, parte da tensão que passa por ele ficará nele. O diodo feito a partir do silício tem uma queda de tensão de 0,7 V, isto é, 0,7V de uma tensão qualquer ficará nele. 18 O diodo possui várias funções, mas no circuito de alimentação deste projeto, funcionará com um retificador, transformando corrente alternada em corrente contínua pulsante, isto é, mesmo que chegue tensão positiva ou negativa em seu Catodo, este não permitirá a passagem, diferente do que seria se chegasse a seu Anodo. Para essa função será utilizada uma ponte de diodos retificadora. Ponte de diodos Uma ponte retificadora de onda completa é um dispositivo que converte corrente alternada, AC, em corrente contínua, DC. A corrente alternada sai das tomadas convencionais das casas e alterna sua polaridade entre positiva e negativa em momentos regulares. Nas residências costuma-se utilizar uma frequência, isto é, intervalos de alternância, de 60 ciclos por segundos (60 Hz, lê-se Hertz). A corrente contínua é a mais utilizada por dispositivos eletrônicos e, assim, uma fonte de energia de um dispositivo eletrônico deve utilizar um retificador para converter a energia da tomada em corrente, para que possa ligar o aparelho. Para se utilizar uma ponte de diodos é necessário utilizar um arranjo especial de diodos para que estes transformem os semi-ciclos negativos em semi-ciclos positivos, fazendo com que só haja ciclos positivos, aproximando o máximo de uma corrente contínua sem o uso de outros componentes que serão vistos a seguir. No arranjo citado, os diodos formam dois pares. Em um par, as extremidades dos cátodos dos diodos ficam de frente uma com a outra, e no outro par, as duas extremidades do ânodo dos diodos também ficam de frente uma com a outra. Figura 5: Esquema elétrico de uma Ponte de Diodos com transformador Fonte: Autores (2014) 19 Quando ligado, o retificador converterá a corrente proveniente da tomada em corrente utilizável pelo dispositivo conectado à ponte de diodos. Figura 6: Diferença entre entrada e saída Fonte: Autores (2014) Mas a corrente mesmo retificada ainda possui picos que diferenciam entre si, para isso utiliza-se um componente suavizador, para que não haja tanta discrepância entre os picos e estabilizar a corrente entre o pico máximo e mínimo. Em nosso circuito será utilizado um capacitor, explicado a seguir. 1.2.3. Capacitores É um componente elétrico com a funcionalidade de armazenar energia elétrica, constituído por dois eletrodos conectados placas de armazenamento de cargas opostas. Essa carga é armazenada na superfície das placas, mas como tem cargas elétricas de dimensões iguais, mas sinais opostos, a carga total será zero. Sua unidade de medida é o F (Farad), razão entre a carga elétrica em uma de suas placas e a tensão aplicada a elas. A unidade Farad é muito grande, pois dificilmente poderíamos obter um capacitor que recebendo a carga de 1 Coulomb, medida da carga elétrica, em suas placas, e adquirisse o potencial de 1 Volt apenas. A unidade mais usada na prática, isto é, na medida de capacitância é o microfarad, 1 μF. F=C/V Capacitância(F) = Carga Elétrica(C) / Tensão (V) 20 Quanto maior à capacitância, maior será a carga acumulada nestas placas, por esse motivo o capacitor é um “armazenador” de cargas elétricas e quanto maior sua capacitância, maior será a carga que ele é capaz de armazenar. Os capacitores são classificados pelo seu material de dielétrico, seu material isolante que possui alta capacidade resistiva à corrente elétrica. Os mais comuns são os de cerâmica, que suporta até 1μF, os de poliéster, de 1nF à 10μF, e o eletrolítico, utilizado para alta potência, de 1μF até 1000μF. Figura 7: Símbolo de alguns tipos de Capacitores Fonte: Site: Kemper (www.kemper.com) Serão utilizados no processo os eletrolíticos, tanto no circuito de alimentação, quanto no sistema de dimerização presente no circuito de controle. Ele armazenará cargas excedentes nesse circuito e definirá o ângulo de disparo do sistema de dimerização. 1.2.4. Reguladores de tensão Para um circuito de alimentação de média e baixa potência é indispensável o regulador de tensão na forma de um CI de três terminais encapsulado em um invólucro TO-220. A série 7800 é a mais comum entre esses reguladores de tensão, que fornecem desde 5 V à 24 V. Nessa série os dois últimos números do componente indicam a tensão fornecida. Para um bom funcionamento dessa série, a tensão de entrada deve ser no mínimo 2 V mais alta que a tensão nominal de saída. A tensão máxima de entrada 21 para os CIs1 de 5 a 18 V é de 35 V, já para o de 24 V é 40 V. Esses circuitos possuem medidas de segurança contra curtos-circuitos e não necessitam de componentes externos além de um dissipador de calor. Figura 8: Invólucro TO220 do 7800 Fonte: Site: Instituto Newton C. Braga No circuito será utilizado o CI regulador de tensão 7805, que transformará aproximadamente 24 V em 5 V, ele terá seu primeiro pino ligado ao capacitor e a ponte de diodos, o segundo ligado ao conector molex que levará até o microcontrolador e o terceiro ligado ao terra. 1.3. Circuito de Controle O circuito de controle será constituído pelo microcontrolador que definirá a rotação de acordo com a temperatura, o rele que ativará a passagem de corrente para o circuito de dimerização automática que será atuado por meio de um motor DC acionado por pequenos pulsos de milissegundos, definindo assim a velocidade de rotação do motor do ventilador. 1.3.1. Atmega328 A empresa ATMEL é famosa por seus microcontroladores e microprocessadores, criando CIs para diversas partes do mundo, seus CIs normalmente recebem as duas primeiras letras do nome da empresa “AT” e a palavra Mega. 1 CI – Circuito Integrado: Componente eletrônico constituído de vários outros componentes menores para realizar uma função, normalmente digital, mas podendo ser utilizado para finalidades analógicas, como o Regulador de Tensão. 22 Para o projeto será utilizado uma variação de uma das principais placas da empresa Arduíno, especializada na comercialização de microcontroladores. O Arduíno é uma plataforma “open-source2" de desenvolvimento, criada com o objetivo de oferecer uma comunicação fácil entre usuário e hardware3. Ele tem diversas funções, podendo receber informações de sensores, controlar luzes, motores, pode ser utilizado em experimentos de circuitos digitais, entre diversas aplicações. Este microcontrolador é programado usando a linguagem de programação e o ambiente de desenvolvimento Arduíno, uma linguagem muito parecida com C4 e muito amigável, tornando possível até mesmo quem não é do ramo da programação poder usar sem maiores problemas. Por ser um software livre5, o Arduíno pode ser executado em qualquer sistema operacional, o que lhe torna ainda mais útil, pois não é preciso mudar de sistema operacional para usá-lo. Outro fator muito útil do Arduíno são suas saídas, pois alguns componentes precisam de 3.3 V e outros de 5 V, e ele consegue variar entre estas tensões. Este modelo de Arduíno vem com um cabo USB para trocar informações com o computador. 2 Open-Source – Programação aberta; 3 Hardware – Parte física de um circuito eletrônico. Linguagem de Programação C – A linguagem C é uma linguagem de programação popular e amplamente utilizada para criar programas de computador 5 Software Livre – Critérios utilizados para definir a disponibilidade de download de um programa de computador. 4 23 Figura 9: Blackboard da RoboCore Fonte: Site: www.robocore.com Aplicações do Arduíno Essa plataforma será o cérebro por trás deste projeto, será em sua interface que o grupo irá implementar o programa que atuará no sistema de controle de rotação, da leitura dos dados de temperatura e da recepção dos sinais do módulo Bluetooth. O circuito de alimentação anteriormente abordado foi desenvolvido para que este seja alimentado por uma tomada de 127 V. O modelo usado neste projeto é o mais próximo possível do “Uno", carro chefe da ATMEL atualmente, seu microcontrolador é o ATMega3286, ele possui quatorze entradas/saídas digitais (sendo seis de PWM), seis entradas analógicas, 32Kb de Memória Flash, 2 Kb de memória RAM e 16 MHz de “Clock Speed", a velocidade de processamento dos dados. Este modelo foi escolhido devido ao seu custo acessível e por atender todas as necessidades do projeto. Microcontrolador ATMega328 – Microcontrolador desenvolvido pela ATMEL, utilizado em várias plataformas do Arduíno. 6 24 Figura 10: Pinagem do Microcontrolador Arduíno Fonte: Site: Webtrônico (http://blog.webtronico.com/?p=107) Para entender melhor o funcionamento desse microcontrolador, cada pino terá suas respectivas funções descritas abaixo. Pinos Descrição Pinos Descrição 1 Reset – Reinicia o programa gravado previamente; I/O digitais controladas e programadas por Software; 2 RX – Receptor de informações de unidades Remotas; TX – Transmissor de informações para unidades Remotas; 5,11,12,15,16 e 17 8 e 22 Pode ser usado como I/O digitais quanto saídas de PWM; GND – Entrada para o terra, ou pólo negativo da placa, estático em 0 V; 7 20 AVCC – Entrada para alimentação alternativa. Pode-se alterar essa tensão de funcionamento para outros componentes; 4,6,13,14,18 e 19 3 9 e 10 23 à 28 VCC – Entrada para a alimentação da Placa; Cristal – Pinos usados para conectar o microcontrolador ao cristal, responsável por determinar a velocidade de processamento do controlador; Entrada e Saída de Componentes Analógicos; Tabela 1: Tabela de pinagem do Microcontrolador Atmega328 Fonte: Autores (2014) 25 1.3.2. Relê O relê é um componente eletromecânico, isto é, apresenta características elétricas e mecânicas, que permite a ativação de cargas elétricas a partir de um sinal de comando, podendo ser digital ou analógico. Sua estrutura é formada por um enrolamento que segue os princípios do transformador, abordado anteriormente, e chaves ativadas eletromagneticamente, podendo ser normalmente abertas ou fechadas (NA e NF, respectivamente) de acordo com o relê escolhido. Tal forma de nomear se deve ao estado de repouso dos contatos em relação à bobina. Um relê de contatos NA significa que enquanto o relê está desligado, seus contatos estão abertos, ou seja, não passa corrente ou tensão elétrica, o inverso acontece com os relês de contatos NF. Enquanto o relê estiver desligado, suas chaves estarão fechadas, permitindo que a carga seja alimentada pela fonte. Quando o relê é acionado, as características de repouso de suas chaves comutam, a chave que estava aberta, fecha, permitindo assim a alimentação da carga, e que estava fechada, abre. Esse estado não se sofrerá alterações enquanto o enrolamento do relê estiver acionado, mas quando ele for desligado, suas chaves retornam ao estado original. Este dispositivo será utilizado para ativar o Ventilador através do microcontrolador, se este receber dados de temperatura acima de 27 °C no ambiente ou se receber um comando de um celular conectado ao aparelho. Será projetada uma placa para ativar o relê a partir de um sinal do microcontrolador. Circuito de dimerização automática Esse circuito é baseado nos famosos Dimmers, tão utilizados, eficientes e ainda assim, simples e barato. Os Dimmers são utilizados para o controle eficiente de cargas de forma linear, mas manualmente. A diferença entre esse circuito e um Dimmer está na forma com que se atuará no potenciômetro que normalmente faz a alteração na tensão que é entregue à carga. O circuito será praticamente o mesmo, apenas o potenciômetro é que sofrerá alteração, sendo interno e atuado por um motor de baixa rotação com caixa moto-redutor. O motor que atuará no potenciômetro será controlado por um sinal do Arduíno, ativando-o a partir de um pino digital do microcontrolador. 26 Figura 11: Circuito Dimmer Fonte: Site: Instituto Newton C. Braga 1.3.2.1. DIAC Um DIAC, Diodo para Corrente Alternada, é um disparador bidirecional, ou um diodo que só conduz corrente após uma tensão de disparo ser atingida, e para de conduzir após a corrente cair abaixo dessa tensão. E por ser bidirecional, funciona desse mesmo modo nos dois sentidos. Essa tensão de disparo normalmente é em cerca de 30 V. O DIAC é comum para disparar TRIACs e SCRs, Retificadores Controlados de Silício. Pode ser equivalente em um circuito de 9 V, por exemplo, ligando dois diodos Zener de 9 V em série de maneira oposta, cátodo com cátodo ou ânodo com ânodo. 1.3.2.2. TRIAC O TRIAC, Triodo para Corrente Alternada, é um componente eletrônico equivalente à dois SCRs, ligados em anti-paralelo (ânodo com cátodo) e com terminal G(Gate – Disparo) ligados. Este tipo de ligação resulta em uma chave eletrônica bidirecional assim como um DIAC, conduzindo corrente elétrica em dois sentidos. Para disparar o TRIAC pode-se aplicar uma corrente positiva no gate, e este uma vez disparado, continua a conduzir até a corrente elétrica caia abaixo do valor de corte do disparo, normalmente o valor do final de um ciclo de corrente alternada. 27 Pode-se controlar o início da condução do dispositivo aplicando um pulso determinado do ciclo de corrente alternada, permitindo controlar a porcentagem do ciclo que estará alimentando a carga. Característica essa que será utilizada no projeto para alimentar o ventilador com a carga proporcional à temperatura. 1.4. Circuito de Entrada Define-se por Circuito de Entrada aquele que terá como componentes os dispositivos e circuitos integrados que são considerados variáveis de entrada nesse sistema de controle, no caso o Módulo Bluetooth, que fará a interação HumanoMáquina e o Sensor Térmico que fará o controle automático da temperatura no ambiente. Suas estruturas, finalidades e funcionamento serão melhores abordados a seguir. 1.4.1. Módulo Bluetooth O sistema Bluetooth é um padrão de comunicação sem fio de baixo consumo de energia para a transmissão de dados entre qualquer dispositivo que tenha esse sistema implantado, desde que a distância não seja grande. O sistema funciona por meio de radiofrequência, detectando o outro dispositivo independentemente de sua posição em relação ao detector, desde que dentro do limite de distância. A tecnologia Bluetooth foi criada para funcionar em todo planeta, o que torna necessária a adoção de uma frequência aberta de rádio e que possa ser utilizada em qualquer lugar. Foi então utilizada a banda ISM (Industrial, Scientific, Medical) de frequência 2,45 GHz, utilizada em vários países. Logo, para o sistema não criar interferências nem sofrê-las, foi criado o esquema de comunicação FH-CDMA (Frequency Hopping – Code-Division Multiple Access). Ela faz com que a frequência seja divida em vários canais, e quando o dispositivo que se conecta a outro muda de frequência rapidamente, utilizando o principio do “salto de frequência” (frequency hopping). Para isso as frequências devem ser pequenas, diminuindo as chances de interferência, sendo cada uma com intervalos de 1 MHz. 28 Em uma rede Bluetooth, quando dois ou mais dispositivos se comunicam, eles formam uma rede chamada de piconet, sendo que o dispositivo que iniciou a conexão é chamado de “mestre” e os demais são “escravos”. O mestre tem a tarefa de regular a transmissão de dados na rede e a sincronia com os outros dispositivos, isso significa que o mestre envia dados e os escravos o recebem. A velocidade de transmissão embora seja considerada baixa, funciona mais do que perfeitamente para o projeto. A versão 2.0 tem como taxa de transmissão de dados 3 Mb/s(megabit por segundo, 3x106 bits por segundo) e será a utilizada no projeto, mas para isso é necessário o padrão EDR (Enhanced Data Rate), ou a velocidade seria de 721 Kb/s. O módulo a ser usado oferece suporte para o modo mestre e o modo escravo, isto é, ele pode tanto enviar quanto receber dados. Em sua placa existe um regulador de tensão que permite alimentação de 3.3 V a 5 V, bem como um LED que indica se o módulo está pareado com outros dispositivos. Segue abaixo algumas de suas características: Possui alcance de 10m; Protocolo Bluetooth 2.0 + EDR; Frequência 2,4 GHz – Banda ISM; Tensão de 3,3 V (2,7 – 4,2 V); Temperatura de funcionamento: -40 até 105°C. Antes de se comunicar com o módulo é necessário que se de o pareamento com o dispositivo que se deseja conectar. Isto varia dependendo do sistema operacional utilizado pelo Smartphone. 1.4.2. Sensor Térmico - LM35 Existem no mercado alguns medidores de temperatura cuja resistência varia de acordo com a temperatura, os termistores. Eles são divididos em duas categorias, o PTC (Coeficiente Termal Positivo) e o NTC (Coeficiente Termal Negativo). O PTC varia a sua resistência positivamente, ou seja, aumenta sua 29 resistência, de acordo com a temperatura, mas essa variação não ocorre linearmente, mas sim com uma curva crescente a taxas crescentes. E o NTC é o inverso, diminuindo sua resistência de acordo com a temperatura, de maneira mais linear, mas ainda sim, não completamente, um de seus principais problemas. Para resolver esses problemas, foram desenvolvidos circuitos integrados que se baseiam na variação das características de amplificação dos transistores, chaves eletrônicas semicondutoras, com a variação da temperatura. Um exemplo disso é o Sensor Térmico LM35 que possui como características: Alta Linearidade na faixa de resistência; Sensibilidade de 10 mV/°C; Faixa de Operação de -25°C/150°C; Tensão de Alimentação de 4 a 30 V; Encapsulamento TO92, como mostra a figura a seguir. A pinagem deste CI é simples, sendo o 1° pino o do VCC, o 2° o do GND e o 3° o de saída das informações que são analógicas. Caberá ao microcontrolador ler esta variável de entrada, associá-la a uma temperatura e executar as linhas de comando para a variação da rotação. Este CI ficará do lado de fora do módulo de controle, para não sofrer interferências de ruídos ou do aumento de temperatura dentro da caixa de proteção devido a circulação de corrente. Para maiores suportes com relação a este componente, seguem no final deste trabalho suas especificações através do Datasheet (Anexo B). 1.5. Caixa de Proteção Para evitar atritos e interferência do meio ambiente nos circuitos projetados, uma caixa de material plástico, o poliestireno, será utilizada para proteger o sistema. Ele possuirá três aberturas, uma para a saída do cabo de 30 alimentação, uma para o conector fêmea da tomada onde será ligado o ventilador e a ultima das aberturas sendo para o sensor de temperatura, que medirá a temperatura do ambiente e não do interior da caixa. 1.5.1. Poliestireno Cristal O poliestireno (PS) é um polímero plástico utilizado em materiais de baixo custo, como réguas escolares e tubos plásticos transparentes utilizados em canetas esferográficas e é a partir do poliestireno que surge o Isopor (EPS). O poliestireno cristal tem como características principais, um tom azulado, apesar do aspecto visual transparente; Espessura de 2 mm; Baixa resistência se comparado ao acrílico. Devido ao baixo custo comparado ao acrílico e o fácil manuseio para o corte, foi feita a escolha por este material, já que o projeto não foi desenvolvido para suportar atritos e impactos, e este se encaixa perfeitamente no perfil almejado pelo grupo. Para sua montagem será necessária uma cola especial. 1.5.2. Cola A caixa de proteção será uma união de placas previamente cortadas, para isso é necessário uma cola resistente. O produto a ser utilizado pode ser utilizado em madeira, vidro, metais, poliestireno expandido, PVC, couro, entre outros materiais. Ele possui resistência à umidade, não possui solvente, é transparente e tem forte poder adesivo. Com os fundamentos teóricos dos principais componentes para a realização deste projeto já apresentados, será necessário, antes da execução, um planejamento para se organizar as tarefas, entender e utilizar algumas das ferramentas indispensáveis na realização de qualquer projeto e se fazer pesquisas para fixar um orçamento para a aquisição dos componentes. Todos estes itens citados serão apresentados a seguir, junto com o planejamento da montagem do projeto. 31 Capítulo 2 – Planejamento do Projeto Toda e qualquer atividade humana feita sem qualquer tipo de planejamento, é uma atividade aleatória que leva geralmente o indivíduo ou qualquer tipo de organização, a destinos não esperados, altamente perigosos e quase sempre torna as situações piores que aquelas anteriormente existentes. O planejamento provoca mudanças em pessoas, em sistemas e em tecnologias. “O planejamento não diz respeito a decisões futuras, mas às implicações futuras de decisões presentes.” (Peter Dracker). Para se ter um projeto, ou produto, dependendo do setor, eficiente é indispensável, tanto como modo de pensamento correlacionando as variáveis, quanto uma organização entre os indivíduos. Uma organização é então uma combinação de esforços individuais que tem por finalidade realizar objetivos coletivos. Por meio de uma organização torna-se possível perseguir e alcançar propósitos que seriam difíceis de se alcançar êxito sozinho. Uma das principais ferramentas do planejamento é o cronograma que possibilita a delimitação de datas para certas ações. Um dos principais tipos de cronograma utilizado é o Cronograma de Gantt. O diagrama de Gantt é utilizado para mostrar o avanço nas etapas de um projeto, com intervalos de tempo entre o início e o fim de cada etapa no eixo horizontal. Ele mostra os intervalos planejados e quais foram os intervalos utilizados para executar a etapa. Neste tipo de gráfico desenvolvido pelo engenheiro mecânico Henry Gantt em 1917 pode ser visualizado as tarefas de cada membro da equipe podendo analisar o tempo utilizado para a execução e assim analisar o desempenho de cada membro. A seguir está o diagrama de Gantt projetado para o ARR, com as atividades a serem realizadas, o tempo em semanas e seus responsáveis: 32 Tabela 2: Cronograma Inicial do Projeto Fonte: Autores (2014) Além da parte da organização e previsão de datas, uma parte do planejamento consiste na aquisição de dados sobre os componentes do projeto, como visto no capítulo anterior, mas como fora dito no início deste capítulo, o planejamento serve para evitar destinos inesperados. Neste caso, o FMEA é uma ferramenta de extrema importância. O FMEA (do inglês: Failure mode and effect analysis) que em português significa: Análise de Efeitos e Modos de Falha, e é uma ferramenta utilizada para aumentar a confiabilidade de um produto durante a fase de projeto e processo. Ela permite avaliar as possíveis falhas de acordo com as características dos componentes do projeto. Para se utilizá-la é necessário que o grupo de projeto ou processos se reúna para discutir as prováveis falhas e pensar em soluções para diminuir a ocorrência, a 33 severidade ou aumentar a detecção. A seguir são apresentadas as duas partes do FMEA do projeto, a de análise e a de correção: Figura 12: Análise de falhas do FMEA com base no gráfico disponibilizado pela Siqueira Campos. Fonte: Autores / Siqueira Campos (2014). Figura 13: Correção das falhas do FMEA com base no gráfico disponibilizado pela Siqueira Campos. Fonte: Autores / Siqueira Campos (2014). Esta é a parte onde se verifica as falhas, junto a seus coeficientes de Severidade, Ocorrência e Detecção. É possível ver, que ao analisar esta tabela, se vê a relação da falha com os efeitos e causas de cada uma delas, junto aos processos atuais de prevenção e detecção. A última coluna representa o produto 34 dos três indicadores, quanto maior esse indicador, maior é a periculosidade em relação ao projeto. Esta é a segunda parte do FMEA, as quais tratam as ações sugeridas pelo grupo, o responsável e o prazo para a finalização da atualização do projeto. A coluna com o Resultado das Ações mostra a ação tomada junto aos novos índices e o produto deles. Para uma análise mais detalhada, o FMEA completo deste projeto se encontra no final deste trabalho (Anexo C). Com base nos dados adquiridos a partir dessas duas ferramentas importantíssimas e do capítulo anterior, seguirá uma explicação do funcionamento e da montagem dos circuitos necessários para o projeto. 2.1. Eletroeletrônica A parte eletroeletrônica consiste em basicamente todo o projeto, ele que fará a obtenção dos dados de entrada e fará as ações previamente programadas. Essa parte será dividida em quatro partes, sendo elas: Circuito de Alimentação; Circuito de Entrada; Circuito de Controle; Esquema elétrico completo. 35 Figura 14: Diagrama de Blocos Fonte: Autores (2014) Começaremos abordando o circuito previsto para a Alimentação dos demais circuitos: Circuito de Alimentação Como dito no primeiro capítulo, este circuito alimentará o sistema de controle e os de entrada, distribuindo a partir de conectores molex a tensão de saída de 5 V dada pelo Regulador de Tensão. Ele é quem alimentará o Arduíno através dos pinos 7(VCC) e 8(GND) 36 MOLEX-3 MOLEX-4 Figura 15: Esquema Elétrico para o Circuito de Alimentação. Fonte: Autores / Eagle Layout Editor (2014). Legenda TR1 Transformador 1A 127/220 – 12 V + 12 V D1 a D4 Diodos Semicondutores 1N4007 C1 Capacitor Eletrolítico de 1000 μF – 40 V Regulador 7805T Regulador de Tensão 7805 – saída de 5 V Conector Molex 2 vias (pequeno, macho) - designado para a saída Conector Molex 2 vias (grande, macho) – designado para a entrada de 127 V para o Transformador Molex - 1/2 Molex - 3/4 Tabela 3: Legenda do Circuito de Alimentação Fonte: Autores (2014) Plano de Montagem do Circuito Dimensionamento da placa de acordo com os componentes; Solda dos componentes, do menor para o maior; Fazer a ligação através de fios de cobre conforme mostrado no circuito; Circuito de Entrada Esse circuito na verdade consiste apenas em ligar o Módulo Bluetooth e o Sensor de Temperatura em placas diferentes somente para conectar ao 37 microcontrolador. O Módulo Bluetooth terá seus pinos RX e TX ligados aos pinos TX e RX (2 e 3) do Arduíno, e será alimentado através do Arduíno também (pinos 7 e 8). Plano de Montagem do Circuito Dimensionar placas individuais de acordo com seu tamanho; Soldar os componentes e os jumpers, conectores metálicos, para fazer a ligação ao microcontrolador; Fazer a ligação de cada pino do componente ao jumper que o interligará ao controlador. Circuito de Controle O circuito de controle consiste na solda de alguns componentes à placa do Relê e do Circuito de Dimerização. Módulo Relê: O módulo relê consiste em: 1 Conector Molex 3 vias pequeno; 2 Resistores de 1KΩ; 1 Transistor NPN BC547B; 1 LED; 1 Diodo Semicondutor 1N4007; Relê NA – 5 V; Contatos Eletromagnéticos (1- Contato NF; 2- Entrada; 3- Contato NA). Um relê como dito anteriormente é um enrolamento, que ao passar corrente por suas espiras gera um campo eletromagnético comutando os estados de seus 38 contatos. Seu esquema elétrico mostra a ligação que cada componente deve ter entre si: Figura 16: Circuito do Módulo Relê Fonte: Autores (2014) CN1 R1 e R2 D1 Q1 D2 RL1 CN2 CN3 Legenda Conector Molex pequeno 3 vias Resistores de 1k Ω LED sinalizador de funcionamento Transistor NPN BC547B Diodo Semicondutor 1N4007 Relê NA-NF – 5 V Conector Molex Grande, 2 vias (conectado à rede elétrica) Conector Molex Grande, 2 vias (conectado ao Dimmer) Tabela 4: Legenda do Circuito do Módulo Relê Fonte: Autores (2014) 39 O módulo relê será adquirido no bazar da Instituição e será alimentado pelo circuito de alimentação que estará ligado ao Arduíno (pinos 7 e 8), o sinal para o seu acionamento será dado pelo pino 17, uma porta I/O digital. Circuito de Dimerização Figura 17: Circuito Dimmer Fonte: Instituto Newton C. Braga O circuito de dimerização a ser utilizado é muito comum em todas as áreas e é um dos primeiros circuitos a se aprender no setor eletroeletrônico, esse circuito continuará o mesmo, apenas um motor será acoplado ao potenciômetro. Ele é constituído por uma resistência fixa de 10kΩ, chamada de R1 no esquema elétrico mostrado, um potenciômetro de 100kΩ e um capacitor cerâmico de 220nF para constituir o sistema de variação linear de tensão na carga, que no projeto consiste no motor do ventilador. O Diac para ativar o Triac que fará a condução da tensão a partir do momento de sua ativação. Esse circuito tem como base o controle do ângulo de disparo do Triac, podendo disparar em diversos pontos de uma onda senoidal que é entregue a partir da rede de energia, podendo assim variar a tensão que se chega na carga. 40 Figura 18: Disparo em diferentes ângulos da rede. Fonte: Instituto Newton C. Braga Sendo assim, se o Triac for disparado no começo de um semiciclo, a carga receberá praticamente toda a onda, e se for disparado no fim, receberá apenas o restante. Para alterar o ponto de disparo é necessário uma rede RC(ResistorCapacitor), com R variável. A tensão passará pela resistência e depois fará com que o capacitor se carregue, a partir do momento em que sua capacidade está completa, ele não estará armazenando mais a corrente que passa por ali. Esta corrente que não é mais armazenada é entregue ao Diac que tem por função disparar o Triac. Quanto maior a resistência, maior o tempo que o capacitor demora para completar sua carga, demorando mais para acionar o Triac, o que faz com que o Triac dispare no final do semiciclo. Esse é o princípio fundamental de um Dimmer. A resistência é composta por um valor fixo para que seja considerado um valor mínimo de disparo, isto é, próximo do início de um semiciclo, e um valor variável, o potenciômetro. O capacitor é quem dita qual o momento do disparo do Diac, pois somente após sua carga completa é que o Diac é acionado. O circuito será alimentado direto na rede e sua saída será para o plug fêmea de uma tomada que se encontrará presa em um suporte na proteção de poliestireno. O motor será alimentado por duas portas de I/O digital do arduíno através de um 41 circuito de Ponte H, composto por 4 resistores de 510Ω e 4 transistores BC557, todos PNP. Com esse circuito o motor poderá rotacionar seu eixo tanto em uma direção, quanto em outra, dependendo da necessidade. Esquema Elétrico Completo Segue abaixo uma tabela onde são mostrados os pinos que cada circuito irá ocupar no microcontrolador, além de um Diagrama de Blocos simbolizado pelos principais componentes elétricos de seus respectivos circuitos. Ele engloba desde o Circuito de Alimentação, até o Circuito de Controle, todos em suas respectivas portas destinadas no microcontrolador. Circuito/ Pinos no ATMega328 Componente Módulo Bluetooth Sensor de Temperatura Circuito Alimentador Dimmer Motor com ponte H Relê RX → 2; TX → 3; VCC → 7; GND →8. VCC →7; GND →8; Saída → 28. Saída →7; GND →8. Nenhum Tabela 5: Circuitos e suas ligações no Arduíno Fonte: Autores (2014) Sentido horário →15; Sentido Anti-horário →16. VCC →7; GND →8; Sinal →17. 42 Figura 19: Diagrama de Blocos com Sistema Elétrico Integrado Fonte: Autores / Livewire (2014) 2.1.1. Previsão de Custos Esta primeira parte do orçamento compreende as variáveis de entrada do sistema, o controlador, o Módulo do Relê (Interface de Potência), o Conjunto de Alimentação, inclusive o circuito de retificação. Os preços encontrados são com base em sites de vendas de equipamentos e componentes eletrônicos e em lojas pesquisadas. 43 Tabela 6: 1ª parte do Orçamento de Eletrônica Fonte: Autores (2014) A próxima parte do Orçamento que será apresentada a seguir junto ao Total compreende o Circuito do Dimmer, o motor a ser utilizado para variar a rotação, jumpers para ligações, e a placa onde serão feitos os circuitos.. 44 Tabela 7: 2ª parte do Orçamento de Eletrônica Fonte: Autores (2014) 2.1. Programação O controlador deste projeto será o Arduíno, uma plataforma de microcontroladores com sua própria linguagem, muito parecida com a linguagem de programação C++, mas com características próprias. Segundo o Diagrama de Blocos (figura 15) apresentado no início deste capítulo, o Circuito de Alimentação alimentará todas as placas, inclusive o Arduíno. O Arduíno funcionará normalmente após a alimentação e a programação gravada em sua memória estará apta a funcionar. Ele está programado para ler os sinais de entrada do Módulo Bluetooth e do Sensor de Temperatura. Se o usuário desejar alterar a rotação do ventilador através do celular, deverá fazer o download do programa de utilização do módulo. Após isso, ele poderá acionar o modo “Manual” através do celular e selecionar o intervalo de velocidade desejada. 45 Se o modo “Manual” estiver desativado o módulo controlará a tensão do ventilador automaticamente através da temperatura do ambiente, isso se ela estiver acima dos 25°C. Se a temperatura do ambiente estiver acima de 25 °C ele permitirá a passagem de tensão elétrica ao motor do ventilador. Após isso o controlador fará a leitura termal do ambiente, medirá 5 vezes a resistência ôhmica que o potenciômetro presente no Dimmer apresenta, fará uma média e saberá qual o valor e a posição em que o potenciômetro se encontra. Então ativará o motor com caixa Moto-Redutora (Conjunto de engrenagens que tem por finalidade reduzir a rotação por minuto, RPM, do motor), até que o potenciômetro se encontre no lugar que corresponde à rotação proporcional para manter o ambiente agradável, previamente escolhida como 25°C. Abaixo segue o fluxograma de funcionamento do programa. 46 47 Figura 20: Fluxograma de Programação Fonte: Autores (2014) FORMA LÓGICA A SER USADA Bloco de Comando – Executar uma tarefa Conexão com outra parte da programação Lógica “if” – Se verdadeiro o que está escrito, ele executa o que estiver à direita. Tabela 8: Legenda do Fluxograma de Programação Fonte: Autores (2014) 48 A linguagem própria do Arduíno permite a utilização dos componentes sem a necessidade de uma biblioteca de programação especial, apenas a “SoftwareSerial”, já presente no software de programação, que permite que os pinos de recepção e transmissão do Módulo Bluetooth sejam conectados em qualquer porta I/O digital.. 2.2. Mecânica O processo mecânico se dará através da confecção de uma caixa a partir de um plástico, o Poliestireno Cristal, e sua usinagem será feita nas depêndencias da instituição de ensino. A primeira etapa seria o corte da chapa adquirida em seis partes, para a montagem de um paralelepípedo retangulo, de acordo com as medidas a seguir. Comprimento x Largura x Altura 170 mm x 170 mm x 70 mm Espessura do Material 3 mm Placas da Lateral 170 mm x 70 mm Placas Superiores e Inferiores 170 mm x 170 mm Tabela 9: Dimensões da caixa de proteção. Fonte: Autores (2014) Após essa parte do processo realizada, uma abertura hexagonal será feita em uma das placas para o encaixe da tomada de conexão com o ventilador. Um pequeno canal deverá ser furado para o encaixe do sensor de temperatura, para que este fique em contato com o meio ambiente. E por último, outra abertura para a saída do cabo de alimentação, mas desta vez um canal quadrado. Todos esses processos serão demonstrados à seguir através das folhas e processo e dos desenhos. 2.2.1. Previsão de Custos O orçamento dos materiais do processo mecânico será demonstrado a seguir junto com sua quantidade e preço total do processo: 49 Tabela 10: Orçamento dos Materiais Mecânicos Fonte: Autores (2014) Verifica-se que as dimensões da chapa de poliestireno se encontram em centímetros, 110 cm de largura por 80 cm de comprimento, como a espessura é uniforme, entende-se como 2 mm. As medidas corretas seriam 1100 mm x 800 mm x 2 mm. Este capítulo mostrou o planejamento que se deve ter ao desenvolver um projeto, como seus circuitos, programação e processos mecânicos, junto com seus respectivos orçamentos. O capítulo a seguir mostrará o processo de desenvolvimento deste projeto, bem como imagens dos circuitos prontos, softwares de programação e processos mecânicos. 50 Capítulo 3 – Desenvolvimento do Projeto Com toda a parte de pesquisa e planejamento prontos, a execução deverá seguir os padrões abordados nos capítulos anteriores. A lista de processos apresentados a seguir será uma espécie de diário de bordo da execução, contendo todas as atividades e ações tomadas para o desenvolvimento do projeto e sua finalização. Esta lista será divida em eletroeletrônica e mecânica, sendo que a parte eletroeletrônica incluirá os processos tomados pela programação. 3.1. Eletroeletrônica A seguir será feita uma lista de tarefas a serem executadas para a finalização do projeto, e mais abaixo será feita a definição da tarefa e como foi realizada. 1) Compra dos componentes e dispositivos eletrônicos; 2) Montagem do circuito de alimentação; 3) Teste do circuito de alimentação; 4) Interligar os circuitos de controle e de entrada; 5) Testar programação em conjunto; 6) Montar Dimmer; 7) Interligar todos os sistemas; 8) Testar todo o sistema; 3.1.1. Definição das Tarefas 1) Compra dos componentes e dispositivos eletrônicos A aquisição dos componentes se dará através de sites de vendas de componentes eletrônicos e do bazar localizado no interior da instituição de ensino. Uma tabela de preços foi montada de acordo com os preços pagos pelos componentes no bazar da escola. 51 LOCAL: BAZAR MATERIAL QUANTD. X PREÇO Capacitor 1000 μF / 40 V 1 x R$1,00 Diodo 1N4007 4 x R$0,10 Regulador de Tensão 7805T 1 x R$ 5,00 Conjunto Molex peq. 2 vias 1 x R$ 0,70 Interface de Potência 1 x R$ 13,00 Conjunto Molex grande 2 vias 2 x R$ 0,70 Resistor 510Ω 4 x R$0,05 Transistor BC557 4 x R$1,50 TOTAL R$ 27,70 Tabela 11: Custos de componentes eletrônicos comprados no bazar Fonte: Autores (2014) Outra tabela listando os materiais adquiridos fora da escola foi montada utilizando ainda a coluna quantidade x preço. LOCAL: DIVERSOS MATERIAL QUANTD. X PREÇO Transformador 1ª 127/12+12 V 1 x R$25,00 Sensor de temperatura LM35 1 x R$5,00 Módulo Bluetooth 1 x R$ 20,00 Arduíno UNO BlackBoard 1 x R$ 69,00 Plug Macho 10 A 1 x R$ 3,50 Plug Fêmea 10 A 1 x R$ 3,50 Cabo de Alimentação (metro) 1 x R$ 2,00 Jumpers 7 x R$ 0,20 Placa de Circuitos 1 x R$ 35,00 Dissipador de Calor 1 x R$ 1,00 TOTAL Tabela 12: Custos de componentes eletrônicos comprados em diversos locais Fonte: Autores (2014) R$ 165,40 2) Montagem do Circuito de Alimentação Após a aquisição dos componentes, o primeiro circuito a ser realizado é o circuito de alimentação. O passo a passo dessa etapa do processo será descrito a 52 seguir. Como em qualquer circuito eletrônico, o primeiro componente a ser soldado na placa é o menor, no caso, os diodos. Cortar um pedaço da placa de circuitos; Soldar quatro diodos formando uma ponte de diodos; Soldar Conector Molex pequeno de 2 vias macho, presente no conjunto; Soldar Capacitor de 1000 μF próximo à ponte de diodos; Soldar Regulador de Tensão; Parafusar Dissipador de Calor no Regulador de Tensão; Interligar todos os componentes de acordo com o capítulo anterior; Ligar o cabo de alimentação ao Plug macho de 10 A; Soldar os fios de saída do Transformador na ponte de diodos; Soldar os fios de entrada do Transformador ao cabo de Alimentação; 3) Teste do Circuito de Alimentação Após a montagem do circuito de alimentação, o próximo passo é testá-lo, para isso será necessária a utilização de um multímetro. Conecte a ponta de prova vermelha ou positiva no terminal positivo do Conector Molex e a ponta de prova preta ao terminal negativo. A saída deverá ser em torno dos 5 V contínuos, por isso troque a posição da chave para a que melhor se encaixe, normalmente 20 V contínuos. Conecte as pontas de prova do multímetro no conector molex; Altere a posição da chave de medição para 20 V DC; Ligue o Plug macho já preso ao cabo de alimentação em uma tomada de 127 V; Observe se no multímetro aparece algum valor em torno de 5 V (de 4,2 V a 5,7 V). No circuito montado para o projeto, a tensão de saída ficou por volta dos 4,7 V, o que entra na margem de erro e serve para alimentar todos os componentes, logo este circuito está pronto para ser utilizado. 53 4) Interligar os Circuitos de Controle e de Entrada Para interligar os circuitos de controle e entrada basta soldar 4 jumpers a outro pedaço da placa de circuitos, e mais 3 jumpers em outro local, para ligar o Bluetooth e Sensor de Temperatura respectivamente. Cortar um pedaço da placa de circuitos suficiente para o Bluetooth e o Sensor de Temperatura; Soldar 4 jumpers em um espaço que de para colocar o Módulo Bluetooth; Soldar 3 jumpers em um espaço pequeno; Soldar os pinos RX, TX, VCC e GND do Bluetooth em cada um dos jumpers; Soldar cabos flexíveis de aproximadamente 10 cm aos jumpers que irão para o sensor de temperatura; Soldar cabos dos jumpers as portas correspondentes do Arduíno já previstas no capítulo anterior; Ligar um cabo do VCC e GND do Arduíno à Interface de Potência, equivalente ao Módulo Relê; Ligar um cabo de uma porta digital do Arduíno para o Conector Molex de sinal da Interface de Potência; Soldar os cabos ao Sensor. 5) Testar programação em conjunto Após a interligação, será necessária a verificação de todos os componentes, fazendo uma programação que seja parecida com o propósito final do projeto, se a temperatura estiver acima de 25°C o relê ligará, e se o celular mandar um sinal equivalente a “Manual”, o sensor deixará de funcionar e o celular é que decidirá se o relê será ativado ou não. Após essa verificação foi comprovado que todos os componentes estão funcionando e que a primeira parte do projeto está concluída. 6) Montar Dimmer e Acoplar motor Com a primeira parte do ARR pronta, só faltaria o Dimmer para cumprir os objetivos do projeto. Para isto, é necessária a montagem de seu circuito e para isso serão necessários cabos mais grossos, pois eles transportarão 127 V. Comprar o restante dos materiais para a confecção da placa; 54 Cortar um pedaço da placa de circuitos; Soldar o resistor de 10 KΩ; Soldar o DIAC; Soldar o TRIAC; Soldar o Conector Molex Grande de Saída e Entrada; Soldar o Capacitor 220 nF; Soldar o Potenciômetro com o segundo e o terceiro pinos curto-circuitados; Fazer as conexões com cabos e trilhas de solda mais largas; Parafusar um Dissipador de Calor no TRIAC; Soldar um cabo de bitola 2,5 para Circuitos Elétricos no Conector Molex Grande de Saída e ligar ao Plug Fêmea de 10 A; Soldar o eixo do Motor com a caixa moto-redutora ao potenciômetro. 7) Interligar todos os sistemas Após todas as placas e componentes soldados em suas respectivas ligações, é necessário interligar todas as placas ao microcontrolador. Ligar o Dimmer a Interface de Potência; Verificar ligações da Interface de Potência ao Arduíno; Verificar ligações do Bluetooth e do Sensor de Temperatura ao Arduíno; Conectar a saída do circuito de alimentação à alimentação do Arduíno. 8) Testar todo o sistema; Esta etapa faz a verificação da ligação de todos os circuitos ao Arduíno. Fazer uma programação simples para ligar cada bloco separado; Fazer uma programação simples para ativar um bloco de controle a partir do Bluetooth e através do Sensor de Temperatura; Controlar a Potência entregue à uma lâmpada incandescente através do circuito de Dimmer; Utilizar a programação completa para ativar um ventilador e controlar sua potência. 55 Após a conclusão destas fases, é possível avaliar a situação da execução do processo até sua fase final, mas o projeto necessita da caixa de proteção, que será detalhada a seguir. 3.2. Mecânica Devido dificuldades encontradas ao se confeccionar a caixa, foi optada por uma sustentação de metal, no caso, foi utilizado o Alumínio. O Alumínio foi adquirido com dimensões de 3300 mm x 12,5 mm x 1 mm (Comprimento x Largura x Espessura). Para a armação da caixa também foram adquiridos rebites e dobradiças. A tabela a seguir demonstra a relação da lista de materiais adquiridos que não se encontravam no planejamento: Alumínio 3300 x 12,5 x 1 mm³ Rebite Diâmetro 3 mm abela 13: Componentes adquiridos pós- planejamento. Fonte: Autores (2014) Dobradiça Diâmetro do furo 3,5 mm Os processos elaborados estão listados aqui por ordem de execução: 1) Compra da Placa de Poliestireno Cristal e da haste de Alumínio; 2) Compra da Cola; 3) Dimensionamento das placas; 4) Corte das placas; 5) Serrar as hastes de Alumínio com 170 mm de comprimento; 6) Furar as hastes com 3,5 mm de diâmetro para a conexão de todas elas para a formação da sustentação 7) Abrir dois canais em uma das placas laterais com base nas dimensões do plug fêmea e de um interruptor, respectivamente; 8) Furar a placa que ficará oposta a anterior com um diâmetro de 2,5 mm; 9) Juntar com rebites a dobradiça à armação; 10) Colar as placas em suas devidas posições na armação; 11) Cobrir o fundo com EVA (Espuma Vinílica Acetinada, uma espécie de borracha); 56 RESULTADOS OBTIDOS O projeto, a partir de todos os dados apresentados não pode ter sua parte eletrônica concluída devido à dificuldade com o disparo do circuito de potência onde o motor utilizado para manipular o potenciômetro possui uma rotação muito forte, além do esperado, e acabaria por danificar o circuito. Mas a base do circuito funcionou como esperado. Ao acionar através de um aplicativo para Smartphones com sistema Android, a tecla 1, o relé é ativado e permanece assim até que o sistema seja desligado pelo interruptor ou receba o sinal equivalente a tecla 2 no celular. A tecla 0 ativa a leitura do sensor de temperatura, mas esta leitura apenas acontece quando a tecla 0 for pressionada, problema a ser consertado através da programação do microcontrolador Arduíno. Se o sensor tem uma leitura superior a 25°C ele ativa o relé. O sistema eletroeletrônico está funcionando como planejado, exceto a o circuito de dimerização que não foi interligado ao projeto. O sistema elétrico recebe da rede 127 V alternados e tem como saída a partir do regulador de tensão 5 V. Essa tensão de saída alimenta o Arduíno, relé, sensor de temperatura e módulo Bluetooth. Existe também um interruptor que interrompe a corrente antes desta chegar ao transformador. A saída do relê está interligado a um plug fêmea que será a saída de todo o processo e ligará o ventilador. A parte mecânica saiu como planejada e este setor seguiu a lista de execução mostrada no capítulo de desenvolvimento a risca. Seguem-se fotos demonstrativas sobre para mostrar o trabalho de montagem e acabamento nas vistas superior e lateral. 57 Figura 21: Vista superior da caixa de proteção. Fonte: Autores (2014) Figura 22: Vista lateral da caixa de proteção Fonte: Autores (2014) 58 Figura 23: Vista isométrica da caixa com o circuito pronto Fonte: Autores (2014) Figura 24: Vista superior da caixa com o circuito interno Fonte: Autores (2014) 59 CONCLUSÃO Com este Trabalho de Conclusão de Curso, foi possível contemplar a dificuldade e a complexidade de um trabalho que envolva pesquisa, trabalho em grupo e solução de problemas. Como abordado na Introdução, os ventiladores foram sendo substituídos aos poucos pela sua falta de praticidade e comodidade aos usuários. Embora o projeto não tenha alcançado totalmente seus objetivos, a parte concluída aumenta e muito a praticidade e a comodidade de um ventilador, por não ter que se locomover até o ventilador, que muitas vezes se encontra em posições de difícil acesso. Graças ao Bluetooth integrado no sistema, é possível acionar e desativar o ventilador à distância e ainda se recebe um sinal de retorno onde é possível se observar a temperatura atual no ambiente. Foi possível identificar ferramentas essenciais para o planejamento e execução de projetos, como o Diagrama de Gantt, verificou a vasta utilização do Bluetooth, sistema atual para muitos sistemas de controle. Neste trabalho foi possível alcançar os objetivos a seguir: Tornar um dispositivo de controle em um módulo universal; Difundir o uso de Smartphones em sistemas de controle; Aplicar conceitos de Automação Mecatrônica ao implantar um sistema de malha fechada; Utilizar conceitos de usinagem e mecânica aos processos plásticos e metálicos, como o Alumínio. A partir deste projeto é possível perceber que a Mecatrônica por abordar conceitos de muitas áreas tecnológicas, abre portas para áreas muito vastas de conhecimentos e possibilita a solução de muitos problemas, mesmo que simples como a falta de comodidade de um ventilador se comparado a um Ar Condicionado. 60 REFERÊNCIAS BIBLIOGRÁFICAS MARQUES, Ângelo Eduardo B. JUNIOR, Salomão Choueri; CRUZ, Eduardo Cesar Alves. Dispositivos Semicondutores: diodos e transistores. 8. ed. São Paulo: Érica, 2002. MARTIGNONI, Alfonso. Transformadores. 4. ed. rev. Porto Alegre: Globo. 1979. THOMAZINI, Daniel; ALBUQUERQUE, Pedro Urbano Braga de. Sensores Industriais: fundamentos e aplicações. REFERÊNCIAS ELETRÔNICAS Electronica. DIAC. Disponível em: <http://www.electronica- pt.com/content/view/169/>. Acesso em 10 de nov. de 2014. Burgos Eletrônica. TRIAC. Disponível em: <http://www.burgoseletronica.net/tiristores_triac.html>. Acesso em 10 de nov. de 2014. Infowester. Sistema Bluetooth. Disponível em: <http://www.infowester.com/bluetooth.php>. Acesso em 10 de nov. de 2014. Filipe Flop. Módulo Bluetooth – RS232 HC05. Disponível em: <http://filipeflop.com/pd-b4742-modulo-bluetooth-rs232-hc-05.html>. Acesso em: 6 de nov. de 2014. Webtrônico. Sensor de Temperatura. Disponível em: <http://www.webtronico.com/lm32-sensor-de-temperatura.html>. Acesso em: 6 de nov. de 2014. Addtherm. Sensores de temperatura – LM35. Disponível em: <http://www.addtherm.com.br/medicao-termica/sensores-de-temperatura-lm35/>. Acesso em: 6 de nov. de 2014. Tudo sobre plásticos. Poliestireno. Disponível em: <http://www.tudosobreplasticos.com/materiais/poliestireno.asp>. Acesso em: 11 de nov. de 2014. 61 Sp Modelismo. Colas. Disponível em: <http://www.spmodelismo.com.br/material/colas.php>. Acesso em: 11 de nov. de 2014. Drucker Institute. Peter Drucker’s life and legacy. Disponível em: <http://www.druckerinstitute.com/ peter-druckers-life-and-legacy/>. Acesso em: 13 de nov. de 2014. Papo Empreendedorismo. Diagrama de Gantt. Disponível em: <http://www.papoempreendedorismo.com.br/2011/09/diagrama-de-gantt.html?m=1>. Acesso em: 13 de nov. de 2014. TOLEDO, José Carlos de; AMARAL, Daniel Capaldo. FMEA: Análise do Tipo de Falha.pdf. São Carlos, [200?].(673 kilobytes). Disco Removível. ATMEL. ATMEL. Disponível em: <http://www.atmel.com/pt/br/>. Acesso em 14 de nov. de 2014. RoboCore. Arduino. Disponível <http://www.robocore.net/modules.php?name=GR_LojaVirtual&prod=530>. em: Acesso em: 14 de nov. de 2014. Projeto 39. Arduino. Disponível em:<http://projeto39.wordpress.com/o-arduino/>. Acesso em: 12 de nov. de 2014. Como tudo funciona. Relé. Disponível em: <http://tecnologia.hsw.uol.com.br/rele.htm>. Acesso em: 8 de nov. de 2014. 62 ANEXOS ANEXO A – DATASHEET TRANSFORMADOR ANEXO B – DATASHEET LM35 ANEXO C – FMEA ANEXO D – CRONOGRAMA FINAL 63 ANEXO A – DATASHEET TRANSFORMADOR 64 65 66 ANEXO B – DATASHEET LM35 67 68 69 ANEXO C – FMEA 70 71 72 ANEXO D – CRONOGRAMA FINAL 73 74
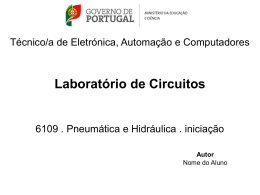
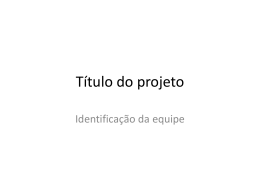
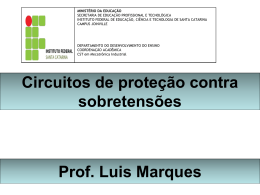
Baixar