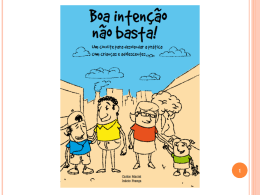
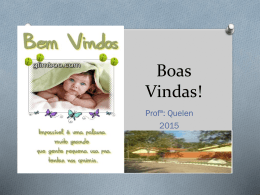
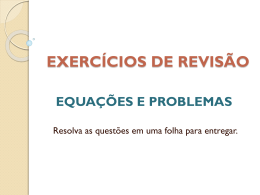
CAPITULO 05 - EIXOS E ARVORES DE TRANSMISSÃO 5.1 - INTRODUÇÃO Eixo é um elemento mecânico rotativo ou estacionário (condição estática) de secção usualmente circular onde são montados outros elementos mecânicos de transmissão tais como: engrenagens, polias, ventiladores, rodas centradas, entre outros. Os eixos são suportados (apoiados) em mancais, de deslizamento ou rolamento, tendo secção quase sempre mássica e variável, com rasgos de chavetas para fixação de componentes. A figura 1 mostra uma iluminação de um eixo. Figura 1 – Eixo Os eixos são elementos solicitados a esforços de flexão, tração/compressão ou torção, que atuam individualmente de forma combinada. Para a segurança do sistema em que o eixo está inserido, este deve ser dimensionado para cargas estáticas (parado ou com rotação muito baixa) ou dinâmica (altas rotações). Este dimensionamento leva em conta a resistência do material de que foi confeccionado, comparam-se as tensões que atuam no mesmo com os limites de resistência do material, estáticos (Sy ou Su) ou dinâmicos (Se – fadiga). Em certos sistemas mecânicos, o nível de deflexão do eixo pode constituir em um parâmetro crítico, devendo o eixo ser dimensionado usando a teoria de deflexão. Em outras palavras, a geometria do eixo deve ser definida para os limites aceitáveis de deflexão, antes da análise das tensões/resistências. 5.2 - MATERIAIS PARA EIXOS E ÁRVORES Há uma grande variedade de materiais possíveis para a fabricação de eixos e árvores. De acordo com o serviço devem ter alta resistência e baixa sensibilidade aos efeitos da concentração de tenção. Para se obter, em um cálculo, diâmetros menores e grandes resistências, pode-se usar aços-liga, em geral tratados termicamente. Estes aços, porém têm a desvantagem de serem 129 caros e de maior sensibilidade às concentrações de tensões. Além disso, o diâmetro é muitas vezes subordinado à certas deformações admissíveis, tornando o aço-liga contra indicado, já que o problema não é mais de resistência. Os aços-carbono, de baixo e médio teor, são, muito usados na fabricação de eixos e árvores. Aços muito empregados são os seguintes: SAE 1015, 1020, 1025, 1030, 1040, 1045, 2340, 2345, 3115, 3120, 3135, 3140, 4023, 4063, 4140, 4340, 4615, 4620 e 5140. Como vemos uma grande variedade de material existe para a confecção de eixos e árvores. A seleção dependerá sempre das condições de serviço, custo, usinabilidade e características especiais por ventura exigidas. É um campo muito aberto em que o projetista deve procurar sempre maiores conhecimentos, pois praticamente qualquer material ferroso, não-ferroso ou não metálico, pode ser usado, por uma razão qualquer, na execução de um eixo ou uma árvore. AISI Nº Tratamento Temperatura Tensão de Tensão de escoamento ruptura Mpa MPa ºC 1030 1040 1050 1060 Alongamento Redução de Dureza Área % Brinell % Q&T 205 848 648 17 47 495 Q&T 315 800 621 19 53 401 Q&T 425 731 579 23 60 302 Q&T 540 669 517 28 65 255 Q&T 650 586 441 32 70 207 Normal 925 521 345 32 61 149 Annealed 870 430 317 35 64 137 Q&T 205 779 593 19 48 262 Q&T 425 758 552 21 54 241 Q&T 650 634 434 29 65 192 Normal 900 590 374 28 55 170 Annealed 790 519 353 30 57 149 Q&T 205 1120 807 9 27 514 Q&T 425 1090 793 13 36 444 Q&T 650 717 538 28 65 235 Normal 900 748 427 20 39 217 Annealed 790 636 365 24 40 187 Q&T 425 1080 765 14 41 311 Q&T 540 965 669 17 45 277 Q&T 650 800 524 23 54 229 Normal 900 776 421 18 37 229 Annealed 790 626 372 22 38 179 Tabela 1 – Características dos Materiais para eixos 130 AISI Nº Tratamento Temperatura Tensão de Tensão de escoamento ruptura ºC 1095 1141 4130 4140 4140 4340 Mpa Alongamento Redução de Dureza Área MPa % Brinell % Q&T 315 1260 813 10 30 375 Q&T 425 1210 772 12 32 363 Q&T 540 1090 676 15 37 321 Q&T 650 896 552 21 47 269 Normal 900 1010 500 9 13 293 Annealed 790 658 380 13 21 192 Q&T 315 1460 1280 9 32 415 Q&T 540 896 765 18 57 262 Q&T 205 1630 1460 10 41 467 Q&T 315 1500 1380 11 43 435 Q&T 425 1280 1190 13 49 380 Q&T 540 1030 910 17 57 315 Q&T 650 814 703 22 64 245 Normal 870 670 436 25 59 197 Annealed 865 560 361 28 56 156 Q&T 205 1770 1640 8 38 510 Q&T 315 1550 1430 9 43 445 Q&T 425 1250 1140 13 49 370 Q&T 540 951 834 18 58 285 Q&T 650 758 655 22 63 230 Normal 870 1020 655 18 47 302 Annealed 815 655 417 26 57 197 Q&T 315 1720 1590 10 40 486 Q&T 425 1470 1360 10 44 430 Q&T 540 1170 1080 13 51 360 Q&T 650 965 855 19 60 280 Tabela 1 (continuação) – Características dos Materiais para eixos 5.3 - CARREGAMENTO ESTÁTICO A determinação das dimensões de uma árvore é muito simples quando sujeito somente a carregamento estático, principalmente se comparado a quando se tem carregamento dinâmico. E mesmo com carregamento dinâmico, muitas vezes é necessário se ter uma boa noção das dimensões das peças para se ter um bom começo dos problemas e por isto faz-se antes uma analise como se o carregamento fosse estático. 131 5.3.1 - CARREGAMENTO ESTÁTICO SUJEITO À FLEXÃO, TORÇÃO E ESFORÇO AXIAL As tensões em um ponto na superfície de uma árvore de diâmetro (d) sujeita flexão, torção e carregamento axial são: x 32 M d3 4 F d2 (1) 16 T d3 xy (2) Onde a componente axial (F) de σx pode ser positiva ou negativa. Nós observamos que há três carregamentos. Momento (M), força (F), e torque (T) aparecem na seção contendo o ponto especifico na superfície. Usando o circulo de Mohr podemos mostrar que as 2 principais tensões não nulas, são: a b x 2 2 x xy 1 2 2 (3) Estas tensões podem ser combinadas de forma a obter a máxima tensão de cisalhamento (τmax) e a tensão de Von Mises (σ’); dando em: a max ' b 2 2 a a 1 x 2 2 2 xy 1 2 2 b b 2 (4) 1 2 x 2 xy 3 (5) 2 Substituindo as equações (1) e (2) em (4) e (5) teremos: max ' 2 d3 8 M F D 2 8 T 1 2 2 (6) 1 4 8 M d3 F d 2 48 T 2 2 (7) Estas equações nos permitem determinar τmax ou σ’ quando o diâmetro(d) é dado ou determinar o diâmetro quando tivermos posse das tensões. Se a analise ou projeto da árvore for baseada na teoria da máxima tensão de cisalhamento, então τmax é: all S Sy Sy n 2 n (8) As equações (6) e (8) são úteis para a determinação do fator de segurança(n), se o diâmetro for conhecido, ou para determinar o diâmetro se o coeficiente de segurança for conhecido. 132 Uma analise similar pode ser feita levando em conta a teoria da energia de distorção para falhas, onde a tensão de Von Mises é: ' all Sy (9) n 5.3.2 - CARREGAMENTO ESTÁTICO SUJEITO À FLEXÃO E TORÇÃO Em varias aplicações, a componente axial (F) das equações (6) e (7) é próxima de zero ou tão pequena em relação às outras que pode ser desconsiderada. Daí teremos: max ' 1 16 d3 (M 2 (10) T 2 )2 16 4 M2 3 d 1 3 T 2 2 (11) É mais fácil resolver estas equações para se encontrar o diâmetro. Substituindo as equações (8) e (9) nos temos: 1 d 32 n Sy 3 2 1 M2 T2 (12) Usando a teoria de máxima tensão de cisalhamento, se o diâmetro for conhecido, calcula-se n da seguinte forma: 1 n 32 d 3 Sy 1 M2 T2 (13) 2 Se usarmos como base a teoria de energia de distorção, teremos: 1 d 1 n 16 n Sy 4 M2 3 T 16 4 M2 d3 Sy 1 2 2 3 (14) 1 3 T2 2 (15) Onde: n = fator de segurança. n = 1,5 a 2,0 Sy = limite de escoamento do material. M = momento Máximo no eixo. T = torque máximo. 133 5.4 – EXERCÍCIOS RESOLVIDOS - CARREGAMENTO ESTÁTICO SUJEITO À FLEXÃO E TORÇÃO 1. Qual o diâmetro de um eixo mostrado na figura 2, feito de um aço AISI 1035 laminado Figura 2 – Engrenagem no eixo. F 700N 3,73kW Motor n 1750rpm I) Torque: T T T 30 103.H .n , onde H=> Potência em KW, tem-se: 30 10 3 .3,73 .1750 20,35N.m II) Momento: M M F L 700 0,3 . . 2 2 2 2 52,5N.m III) Material: Pela Tabela => Sy 462MPa IV) Segurança: Usar n=2. V) Diâmetro: 134 d 32n 2 2 .Sy M T 1 2 3 32.2 52,5 2 .462 10 6 d 13,54mm d 2. 1 20,35 2 1 2 1 3 Do exercício anterior visto, tem-se: M 52,5N.m T 20,35N.m d S y 462MPa n 2 13,47mm M 52,5N.m T 20,35N.m Sy 462MPa Su 551,5MPa Se Ka.Kb.Kc.K d.Ke.Kf.Se ' Ka 0,78 Kb 0,85 Kc 0,923(Su 1520MPa) Kd 1,0 Ke 1,0 Kf 1,0 Se (0,78)(0,85)(0,923)(1)(1)(1)(0,504 . 551,5 106 ) Se 170,1MPa 2 32.2 52,5 d 170,1 106 d 18,50mm 1 3 1 2 2 20,35 6 551,5 10 5.5 - DIMENSIONANDO EIXOS PELA NORMA ASME OBSERVAÇÃO: a norma ASME para Eixo de Transmissão: - Não considera fadiga - Não considera concentração de tensão 135 Segundo a norma ASME – as máximas tensões são cisalhantes: d d 0,30.S yt d 0,18.S ut (16) = máxima tensão cisalhante admissível S yt tensão escoamento admissível Su tensão de ruptura admissível As normas prevêem que se as concentrações de tensões estiverem presentes devido a entalhe em chavetas, a tensão máxima admissível deve ser diminuída de 25%. A máxima tensão cisalhante em um eixo submetido à flexão-torção é dada por: a 2 max M .y I x T .y I x 2 2 M d . 4 .d 2 64 M d . 4 .d 2 64 (17) xy 32.M .d 3 16.T .d 3 logo, max x min 1 32.M 16.T . 4 .d 3 .d 3 16 .d 3 M2 2 T2 x tensão de flexão (psi) xy tensão de torção (psi) momento de flexão (lbf.in) M T = momento de torção (lbf.in) d = diâmetro dp eixo (in) Segundo o critério da ASME, momento M e T devem ser multiplicados por fatores de correção devido a choques e fadiga. d 16.T . M2 .d 3 T2 → d 16.T . C m .M 2 .d 3 C t T 2 → Fórmula da ASME (19) 136 para diâmetro de eixos baseado na teoria da máxima tensão cisalhante. Fatores Cm e Ct dados na tabela. 5.6 - EIXOS E ÁRVORES SUJEITOS À FADIGA Qualquer árvore girante que sofre momento de flexão e torção fixas estão sujeitos a uma inversão, reversão completa da tensão causada pelo giro da árvore, mais a tensão de cisalhamento permanecerá a mesma. xa 32 M a d3 (20) xym 16 Tm d3 (21) onde: σxa = Tensão de Amplitude Alternada τxym = Tensão de Cisalhamento Constante Estas duas tensões podem ser manipuladas usando dois círculos de Mohr Se estivermos usando a teoria de máxima tenção de cisalhamento, teremos: 2 a (22) a 2 m m (23) Se estivermos usando a teoria da energia de distorção, teremos: a (24) xa 3 m xym (25) 5.6.1 - CRITÉRIO DE FADIGA – GOODMAN Para qualquer eixo carregado com um momento de flexão e torção fixos, estará submetido a uma flexão reversa provocando tensões alternadas e torção estacionária, provocando tensões médias. Assim tem-se: 16Tm 32M a ax mxy d3 d3 (26) Usando estas expressões e a equação da linha de Goodman: a Se m Su 1 (27) Pode-se obter, após desenvolvimento analítico que: 137 d 1 2 2 2 Tm 32n M a S e Su 1 3 (28) 5.6.2 – CRITÉRIO DE FADIGA - SODERBERG Utilizando o teorema da máxima tensão cisalhante: xy 16.T .d 3 x 32.M .d 3 Para qualquer plano fazendo um ângulo α com o plano horizontal tem: m a 16.T .cos 2. .d 3 → valor médio 16.M .sen2. → (amplitude da componente alternativa) .d 3 Por meio da geometria analítica, tem-se que: .d 3 n T 16. S sy 2 (29) M S se 2 1 d 2 16.n T . 3 2 2 M S se S sy 1 (30) Para o critério da máxima tensão cisalhante (usada) 1 d sendo que: S sx n 32.n T . S y 3 2 2 M 1 2 S e (31) 0,5.S x Fator de segurança. Sy Tensão de escoamento. Se Limite de resistência à fadiga. 138 Para casos mais gerais usar equação: 139 1 2 n T . a 32. S e d 3 2 2 1 M m S y 2 M a S e 2 M am (32) S y onde: Ta Torque (amplitude) Tm Torque médio Ma Momento (amplitude) M am Momento médio 5.7 – EXERCÍCIOS RESOLVIDOS - CRITÉRIO DE FADIGA POR SODERBERG 1. Um eixo usinado é fabricado de um aço com Su = 550 MPa. Calcular n. Dado: T = 6,0 KN 175.F 500 R1 a 325.F 500 R1 tensão alternada max a min 2 = max Se n a a M I c M R1 .L I .d 4 64 a KF. 100Mpa 175.F .200 500 420KN .m onde: I c .d 3 e c 32 d 2 M I c Se K a .K b .K c .K d .K e .S e ´ S e´ 0,504.S u 140 b a = 4,51 e Ka a.Su Ka 4,51.550 Kb d 7,62 Kc Kd Ke 1 Kf K r d f logo, K e 0,847 0,1133 0,841 1 0 ,0857 1 q. K t Kf 0, 265 b = -0,265 1 1,58 1) → 1,58 Kt q 1,72 → D d 1, 428 0,80 0,633 logo, Se n 124,4MPa Se a 2. 124,4 99,08 1,25 A transmissão representada na figura é movida por um motor elétrico, assíncrono, de indução, trifásico, com potência P= 3,7 kW e rotação n= 1140 rpm. Dimensionar o diâmetro da árvore 2, sabendo-se que a árvore é maciça e o material utilizado possui Su = 700 Mpa, Sy = 630 Mpa e o fator de projeto é 1,8, com as engrenagens enchavetadas no eixo (adotar Kf= 2,8). As engrenagens são cilíndricas (ECDR) e possuem as seguintes características geométricas: Z1= 23; Z2=49; Z3=28 e Z4= 47 m= 2,5 mm e ângulo de pressão 20º. 140 Figura 3 - Exercício resolvido 1. Calculemos o torque na árvore 1 MT 2 3000 P Z 2 . . n Z1 A potência do motor - P = 3700 W Portanto MT 2 3000 3700 49 . . 1140 23 MT 2 66.030N .mm Esforços na transmissão: Força tangencial (FT) Força tangencial (no primeiro par) Diâmetro primitivo 2.M T FT d0 2 d0 2 FT 2 m.Z 2 2,5.49 2x66030 122,5 d0 2 122,5mm FT 1.078N d0 70mm Diâmetro primitivo: d0 3 FT m.Z 3 2,5.28 2x66030 70 3 FT 1.887 N FR 392N Força radial no primeiro par FR FT .tg 20º FR 1078.tg 20º 141 Força radial no segundo par FR FT .tg 20º FR 1887.tg 20º FR 687 N Momento fletor Plano vertical MA 0 600.R BV RBV Fy 687.500 392.100 638N 0 R AV RBV R AV 441N 392 687 Figura 4 – Forças cisalhantes, diagrama de momento fletor no plano vertical M max R AV .500 392.400 M max 63.700N .mm 142 Plano Horizontal MA 0 1078.100 1887.500 600.RB H 1393N RB H Fy 0 RA H R BH RA H 584N 1087 1887 M V2 M max M H2 M max 63700 2 139300 2 M max 153.174N .mm Figura 5 – Forças cisalhantes, diagrama de momento fletor no plano horizontal Cálculo do diâmetro considerando cargas estáticas TMTC 1 d 32.n .(M 2 .Sy 3 T2) d 32.1,8 .(1531742 .630 1 2 1 3 66030 2 ) 1 2 d 16,95mm TED 1 d 16.n .(4.M 2 .Sy 3 3.T 2 ) 1 2 d 16,99mm Cálculo do diâmetro considerando carregamento dinâmico S e' 0,504.S u S e' 0,504.700 ' Se 352,8Mpa 143 b a = 4,51 e Ka a.Su Ka 4,51.700 Kb d 7,62 Kb 16,93 7,62 Kc Kd Ke 1 Kf K 2 ,8 f 0, 265 b = -0,265 0,784 0,1133 0,1133 0,91 1 Ke 0,357 Se K a .K b .K c .K d .K e .S e' Se 0,784x0,91x1x1x0,357x352,8 Cálculo do diâmetro pelo critério de Goodman 1 d 2 32.n Ma . Se d 2 32.1,8 155215,3 . 84,86 3 2 Tm 1 2 Su 1 2 66030 700 1 2 3 d 32,15mm 5.8 – CHAVETAS / PINOS Chavetas e pinos são dispositivos mecânicos usados para fixar no eixo, engrenagens, polias e outros elementos de tal forma que o torque possa ser transmitido através dele. Os pinos são usados com duplo propósito, o de transmitir o torque e evitar deslocamento axial do componente montado no eixo. A figura abaixo ilustra estes dispositivos. 144 Figura 6 – Chavetas e Pinos. 5.9 - UNIÃO DE EIXOS COM CUBOS O cubo é a parte centra do elemento (polia, engrenagem, etc.) onde é realizado um rasgo para a fixação da chaveta. Figura 7 – União de eixos com chavetas cúbicas. A chaveta é uma peça que vai ocupar o rasgo no eixo e no cubo, simultaneamente, fazendo a união dos mesmos. Os principais tipos de chavetas, as mais usadas são definidas por normas (padrões). Estas chavetas são do tipo: Chaveta meia-lua (woodruff) Chaveta plana. Chaveta inclinada. A figura 8 mostra estas chavetas e a geometria, bem como a forma de usinagem do rasgo. Observar que os rasgos das chavetas meia-lua são usinados com fresa circular as chavetas planas e inclinadas com fresa circular e de topo. 145 Para exemplificar os padrões de chavetas tem-se: Uniões por adaptação de forma. Uniões por adaptação de forma com pretensão. Uniões por atrito. Chaveta meia-lua. Chavetas planas e inclinadas. Figura 8 – Tipos de Chavetas 5.10 - DIMENSIONAMENTO DE CHAVETAS Como já foi visto anteriormente, as chavetas são tabeladas quanto a sua secção.O dimensionamento da chaveta consiste em determinar o seu comprimento mínimo (L), como é o caso das chavetas planas e inclinadas (as mais usadas). 146 Figura 9 – Dimensionamento das chavetas. As tensões que atuam nas chavetas são determinadas da seguinte forma: Figura 10 – Tensões atuantes nas chavetas. Quando a chaveta acopla (une) um eixo e uma polia, a transmissão de potencia do eixo para a polia, força a chaveta de forma inclinada. Esta força (F) tende a cisalhar (rasgar) a seção AA’ da chaveta. Logo: F F A t.L Modelo Matemático (33) Comparando com o limite de resistência cisalhante ao escoamento (Ssy) e para um fator de segurança n, tem-se: S sy n F t.L S sy n (34) 5.11 – EXERCÍCIOS RESOLVIDOS – CHAVETAS 1. Um eixo de aço AISI 1018 (ABNT) trefilado a frio tem Ssy = 185MPa. Uma chaveta quadrada deve ser usada para acoplar um eixo de d = 40mm e uma engrenagem, que transmitirão 22,38KW a uma rotação de 1100rpm. Usar fator de segurança n = 3,0. 147 F T d 2 R d 2 => Força na chaveta 40 ⇒R 2 20mm 30 103.H Como: T , onde H=> Potência em KW , tem-se .n Figura 11 – aplicação de chaveta. T 30 10 3.22,38 .1100 ⇒T 194,2 N .m Logo: F 194,2 20 10 3 ⇒F 9713 N Para a chaveta, temos: F S sy t.L n F n . t. S sy L 3 9713 . 0,008 185 106 L 19,7mm L Observar que, o comprimento mínimo é L = 19,7mm como a geometria do cubo é maior do que o diâmetro do eixo, e como as chavetas têm o comprimento do cubo, pode-se dizer que o comprimento da chaveta a ser usada é: L 40mm 148 5.12 - VIBRAÇÃO DE EIXOS A figura 12 mostra um rotor consistindo de um grande disco de massa M montado em um eixo, na metade da distância entre os mancais. A massa do eixo será considerada desprezível comparada com M. Mesmo com um balanceamento de alto grau de precisão, há contudo uma pequena excentricidade e do centro de massa g do disco, em relação ao eixo de rotação. Por causa da excentricidade, a força centrífuga ocasionada pela rotação do eixo faz com que este sofra uma deflexão r. Visto pela extremidade do eixo como na figura 12, o centro O do disco parece estar girando em torno do eixo de rotação sobre uma circunferência de raio r. A força de inércia causada por este movimento forçado é Fo = M(r + e) w2. Devido à deflexão do eixo, considerado como uma mola, a resistência à força de inércia é kr, sendo k a constante de mola do eixo na flexão. O sentido da aceleração do centro de gravidade g é conhecido neste caso, de modo que se pode mostrar o vetor MA como uma força de inércia Fo (como na figura 12). Pode-se então escrever a equação do equilíbrio estático: ∑ F M (r 0 e)w 2 kr 0 (35) Figura 12 - Rotor com disco 149 Para se determinar o raio r, pode-se apresentar a equação (35) da seguinte forma: ew 2 r k w2 M Quando a velocidade ω do eixo for igual a (36) k / M , o denominador da equação (36) se anulará e r atingirá valores intoleravelmente grandes. A rotação do eixo assim defletido parece com uma viga em vibração quando visto do lado onde somente pode-se observar a projeção do k / M do eixo rotativo como a freqüência circular movimento. Portanto, pode-se considerar natural ωn da viga quando levada a vibrar naturalmente no seu primeiro modo de vibração. Pode-se escrever a equação (36), na forma adimensional: r e (w / wn ) 2 1 (w / wn ) 2 (37) A representação gráfica da equação (37) e indica a condição crítica de rotação, quando ω for igual a ω n = k / M , devido às amplitudes muito grandes da vibração do eixo. Na condição crítica, chama-se ω de ωc e a velocidade de rotação do eixo em rotações por minuto será 60 wc 2 nc onde ω n = nc 60 wn 2 (38) k / M normalmente é expresso em rad/s. Assim, 60 wn 2 60 2 k M 9, 55 k M 9, 55 kg P 29, 9 k P 30 k P (39) na qual nc è a velocidade crítica em rotação por minuto, k está em Newtons por metro e M. em quilogramas. Pode-se calcular a constante k da mola através da deflexão estática δest do eixo devido ao peso do rotor. Assim, k = Mg/δest e quando substituído na equação (39), a velocidade crítica será expressa pela seguinte equação: nc 30 1 est (40) Segundo os livros-texto de resistência dos materiais, pode-se calcular a deflexão estática de uma carga P atuando no centro de uma viga uniforme bi-apoiada, como δest = Pl3/48 EIA. Assim, a velocidade crítica de um eixo com uma massa M situado no meio da viga, pode ser calculada em termos das dimensões do eixo (l é o comprimento do eixo, entre apoios, IA é o 150 momento de inércia da área da seção reta do eixo, igual a πd4/64, d é o diâmetro do eixo) e do módulo de elasticidade E do material do eixo. nc 46 Ed 4 Pl 3 (41) Assim, de acordo com a equação (41), pode-se alterar o material e as dimensões do eixo, assim como o peso da massa Af, de modo que a velocidade crítica nc seja superior ou inferior à velocidade de projeto n na qual deseja-se operar. Caso n/nc for menor do que 0,707 ou maior do que 1,414, r será menor do que o dobro da excentricidade e. Por exemplo, se a excentricidade e for 0,025 mm, r será 0,050 mm quando n/nc = 2. É interessante observar que em velocidades muito acima da crítica (ω/ωn>>1,0), o valor de r/e = -1 e r = - e, indicando que o centro de massa de M estará no eixo de rotação. Neste caso a massa não estará oscilando, porém o eixo oscilará em torno do centro de massa de M. Até agora, considerou-se desprezível a massa do eixo. No caso da massa do eixo ser grande bastante para não ser desprezada, e o eixo ter diâmetro uniforme, deve-se somar à massa M 50 por cento da massa m do eixo, para se determinar à freqüência circular natural. wn k (M 0, 5m) (42) Conforme mostra a figura 12, supõe-se que os mancais do eixo sejam rígidos. Em certos casos, pode-se considerar os mancais como elasticamente apoiados, e neste caso o δest da equação (40) deve incluir a deflexão estática dos apoios assim como a deflexão do eixo. Entretanto, aplica-se a equação (40) somente quando a flexibilidade dos apoios for a mesma para todas as posições angulares do rotor. 5.13 - FREQÜÊNCIA NATURAL E VELOCIDADE CRÍTICA Pode-se ter uma variedade muito grande de configurações de rotores desde que sejam usadas diversas massas e diversos apoios, assim como eixos de diâmetros variáveis. Embora as curvas do fator de amplificação sejam difíceis de serem obtidas matematicamente, as velocidades críticas dos eixos são determinadas com relativa facilidade através de cálculos de freqüência natural. No próximo item, serão apresentados diversos casos de determinação da velocidade crítica a partir da freqüência natural. 151 5.14 - FREQÜÊNCIA NATURAL DE EIXOS COM DIVERSAS MASSAS Em um eixo rotativo com diversas massas conforme mostra a figura 13a, pode-se determinar a freqüência circular natural ωn do eixo que, sem girar, vibra livremente, sem amortecimento, após uma deflexão inicial no primeiro modo de vibração. Pode-se aplicar o método de Rayleigh neste caso. Considerando que o sistema vibratório é conservativo, a soma da energia potencial e da cinética é constante em qualquer fase da vibração. Duas destas fases analisam-se facilmente. Na fase em que todas as massas estão simultaneamente nos máximos deslocamentos Y, a energia armazenada elasticamente no eixo é igual è energia potencial ∑ FY/2. Nesta fase a energia cinética é zero porque todos os pontos do sistema estão momentaneamente com velocidade zero. Assim, a energia potencial é EP F1Y1 2 FnYn F2Y2 ... 2 2 (43) As forcas F são as necessárias para a deflexão do eixo, como se fosse uma mola, ate ficar com a conformação mostrada nesta fase. O produto forca-deslocamento determina energia potencial. Entretanto, como a forca e diretamente proporcional ao deslocamento, a forca media que atua durante o deslocamento Y e F/2. Durante a vibração, o eixo passa pela fase de repouso (não deformada) na qual a energia potencial e zero, mas a energia cinética e máxima porque as velocidades das massas são máximas. Considerando que as massas tem movimento harmônico simples, as velocidades são V = Yωn e as energias cinéticas são MV2/2 = M(Yωn)2/2. Assim, a energia cinética do sistema é EC wn2 M 1Y12 2 M 2 Y2 2 ... M nYn 2 wn2 2 PY 1 1 2g P2 Y2 2 ... PnYn 2 (44) (a) Flexão dinâmica 152 W3 W2 d3 d2 d1 W1 (b) Flexão estática Figura 13 – Flexão Igualando-se os membros da direita das equações (43) e (44), pode-se deter-minar a freqüência circular natural ωn. Entretanto, as forças F e os deslocamentos Y não são conhecidos, mas podem ser determinados considerando-se a forma do eixo defletido estaticamente sob a ação dos pesos conforme indica a figura 13b. Considerando que os deslocamentos Y da vibração são proporcionais as deflexões δ da deformação estática, então Y1 Y2 1 2 ... Yn (45) n Como as formas para defletirem uma mola são proporcionais as deflexões então F1 P1 Y1 F2 , 1 P2 Y2 Fn , Pn 2 Yn (46) n Igualando as expressões da energia potencial e da cinética dadas pelas equações (43) e (44) e usando as equações (45) e (46) para a eliminação de F e Y, a equação resultante que da a freqüência circular natural é wn2 g P1 1 P 2 1 1 wn2 g P2 P2 ∑P ∑P 2 2 2 ... Pn n ... Pn n 2 2 (47) e a velocidade critica pode-se determinar de nc = 60 ωn /2π . A equação de Rayleigh equação (47) e uma expressão simples e altamente útil para determinar a freqüência natural fundamental de muitos tipos de rotores. A determinação da deflexão estática constitui a maior parte do esforço necessário na execução dos cálculos conforme está ilustrado nos exemplos seguintes. As fórmulas de deflexão de vigas, para inúmeros casos, estão disponíveis em livros texto de resistência dos materiais e em manuais. Pode-se aplicar o método da área do diagrama de momento fletor e outros em casos gerais. Dispõe também de métodos gráficos, conforme ilustrado no item seguinte, para a determinação das deflexões estáticas de rotores com eixos de diâmetros variáveis. 153 Para inclusão da massa do eixo nos cálculos, deve-se dividi-lo em diversos comprimentos, cada um tratado como se fosse uma massa adicional. A equação (47) não e estritamente uma avaliação exata da freqüência natural porque a curva das deflexões estáticas não e proporcional exatamente a curva deflexões dinâmicas, como foi considerado. Entretanto, o resultado obtido equação e somente um ou dois por cento superior a freqüência natural funda verdadeira. Considerando que outros fatores tais como efeitos giroscópicos durante a oscilação, ajustagens forçadas de discos no eixo, e chavetas alteram raramente a velocidade critica, a equação (47) produz uma resposta aceitável. A deflexão dos apoios pode ter uma influencia maior sobre as velocidades críticas e devem ser acrescidas as deflexões do eixo, na equação (47). A freqüência natural dada pela equação (47) é a fundamental, ou a mais baixa freqüência do sistema de massas. É desejável, portanto, se possível projetarem-se as dimensões de um, eixo de tal modo que a velocidade crítica mais baixa seja superior à velocidade de projeto. Entretanto, nem sempre isso é possível. Em turbinas de alta rotação, a velocidade de operação pode estar entre duas velocidades críticas de modo que o eixo não necessita tornar-se excessivamente pesado. Neste caso, é necessária a passagem pela velocidade crítica mais baixa, o que pode ser perigoso. Entretanto, se o rotor estiver cuidadosamente balanceado e a primeira velocidade crítica for baixa, as forças perturbadoras serão pequenas nas regiões perto da crítica. Também, a amplitude de vibração à velocidade crítica aumenta a níveis perigosos somente se for permitido um tempo para a amplitude crescer; portanto, acelerando-se na passagem pela velocidade crítica, pode-se manter as amplitudes em intensidades aceitáveis. O amortecimento natural do material do eixo, embora pequeno, também tende a reduzir as amplitudes. Muitas máquinas bem sucedidas foram projetadas para funcionar entre velocidades críticas. Quando o eixo se estende para fora dos mancais como na figura 12a, deve-se inverter os sentidos dos pesos como indica a figura 12b na determinação das deflexões estáticas para emprego na equação (47). Deve-se notar que se simula dessa maneira a curva da deflexão dinâmica de meia-onda, para obtenção da freqüência natural mais baixa. 154 (a) (b) Figura 14 – Freqüência natural da estrutura 5.15 – EXERCÍCIOS RESOLVIDOS – VIBRAÇÕES EM EIXOS 1. Um rotor de compressor de 25 kg e um rotor de turbina, de 15 kg, são montadas em um eixo de aço conforme mostra a figura 13a. O eixo deve operar à velocidade prevista de 10.000 rpm. Empregando a equação de Rayleigh (47) determine o diâmetro do eixo mais leve que possa ser usado para que tenha uma velocidade critica fundamental de 12.000 rpm, com uma margem de segurança de 2.000 rpm. 155 (a) (b) (c) (d) Figura 15 – Aplicação de vibrações em um eixo Conforme a figura 15b mostra, inverte-se a carga P2 a fim de se obter uma curva de deflexão com o formato do uma meia-onda simples. As figuras 15c e 15d mostram a forma da viga deformada sob a ação de cada carga atuando independentemente, conduzindo assim a dois casos cujas fórmulas deflexão estática mostradas a seguir encontra-se em livros-texto de resistência dos materiais. Pelo método da superposição, pode-se determinar as deflexões δ1 e δ2: 1 1 1 1 25 0, 503 EI A 48 2 2 2 3 Pl P2 l 2 a 1 48EI A 16EI A 15 0, 50 2 0, 25 16 2 Pl 1 a 16EI A P2a 2 (l a) 3EI A 0,12369 EI A 0, 322 EI A Usando-se a equação (47), 156 wn2 P P g 1 21 2 P1 1 P2 2 2 2 25 0,12369 15 0, 332 gEI A 2 2 25 0,12369 15 0, 332 Para g= 9,81m/s² e E= 2,1 x 1010 kg/m² wn2 81, 678 1010 I A IA 0, 012243 10 10 wn2 Para nc= 12.000 rpm wn 2 nc 60 1260 rad/s Portanto, o momento de inércia necessário do eixo é: IA 0, 012243 10 10 1260 2 Como IA= πd4/64, d4 d 64 IA 395973, 4762 0, 0793 m 10 -10 79, 9 mm Deve-se usar um diâmetro de 80mm. 2. Os apoios do rotor do exemplo 1, figura 15a, foram considerados como rígidos. Determine a velocidade crítica do rotor do exemplo 1 se cada um dos apoios sofrer uma deflexão de 0,14/EIA sob um carregamento estático. Use IA = 1,84 x 10-6 m 4 e E = 2,1 x 1010 kg/m2. Devido à flexibilidade dos apoios, as cargas Pl e P2 terão uma deflexão adicional. Conforme indica a figura 16, sob o carregamento, o apoio da esquerda desloca-se para baixo e o da esquerda para cima. Como se pode ver, não há influência nobre a deflexão da carga P1, porém o deslocamento de Pl aumenta de 0,28/EIA. Portanto as deflexões estáticas totais são 1 0,12369 EI A 2 0, 332 EI A 0, 28 EI A 0, 612 EI A . Substituindo estes valores na equação (47), 157 wn2 774602 wn 880,1 rad/s nc 60 wn 2 60 (880) 8404 rpm 2 5.16 - EIXOS ESCALONADOS A equação (47) para velocidade crítica se aplica a eixos de rotores do tipo mostrado na figura 10a, no qual o diâmetro varia em degraus. Entretanto, como IA é variável em tais casos, não se derivam com facilidade para as deflexões estáticas. Pode-se usar um dos diversos métodos gráficos, tal como o seguinte. 0,14 EI 0, 28 EI A 0,14 EI A Figura 16 – Eixos Escalonados Deve-se recordar da resistência dos materiais que para se determinar à deflexão estática deve-se resolver a equação diferencial básica: d2 y dx 2 M EI A (48) Na qual y é a deflexão, M é o momento fletor como função de x, e IA é O momento de inércia da seção reta do eixo, como função de x. Integrando-se duas vezes a equação (48) obtém-se a deflexão da viga. A primeira integração conduz a dy/dx, inclinação da curva elástica da viga deformada. Além disso, iniciando-se com as cargas da viga, necessitam-se de duas integrações para a obtenção do diagrama do momento fletor. Assim, necessita-se de quatro integrações para se obterem as deflexões a partir do carregamento conhecido. Como o processo de integração é o somatório de áreas sob as curvas, pode-se empregar um método gráfico para um somatório para vigas complexas que têm funções com numerosas descontinuidades. O método gráfico exige que as curvas sejam traçadas em escala 158 a fim de que as áreas sob as curvas possam ser avaliadas através da medição de quadrados ou usando-se um planímetro. A figura 17a mostra um rotor de aço com uma engrenagem de 89,0 N e um eixo de três diâmetros diferentes. Divide-se a viga em cinco partes, mostrando-se os pesos de cada parte no respectivo centro de gravidade. Uma delas inclui o peso da engrenagem. A figura 17a é um diagrama de carregamento a partir do qual pode-se determinar o diagrama de esforço cortante mostrado na figura 17b através de métodos convencionais (a primeira integração). Obtém-se o diagrama de momento fletor da figura 17c através das áreas do diagrama de esforço cortante (a segunda integração). Por exemplo, a ordenada M1 é obtida a partir da área Al, a ordenada M2, n ∑A é a soma das áreas A1+A2 e a ordenada Mn é 1 . Deve-se levar em conta o sinal de cada área. Devem-se multiplicar as áreas em milímetros quadrados pelo fator de conversão apropriado obtido das escalas do diagrama de esforço cortante, afim de que as ordenadas do diagrama de momento fletor sejam em N/mm. 159 Figura 17 – Deflexões em um eixo de carregamento conhecido Depois de realizadas as integrações, deve-se transformar o diagrama de momento fletor no diagrama M/EIA conforme exigido pela equação (48). Divide-se cada ordenada do diagrama de momento fletor pelo valor adequado de EIA (E = 207x x 103 N/mm2 para o aço e IA = πd4/64) para obtenção das ordenadas M/EIA da figura 17d. Obtém-se as ordenadas da figura 17 e representando a inclinação dy/dx da elástica (terceira integração), através das áreas do diagrama M/EIA. As ordenadas traçadas a partir do eixo x' são todas positivas. Entretanto, sabese do formato esperado da elástica que as inclinações são negativas perto da extremidade da esquerda da viga, positivas na extremidade da direita e nas proximidades do meio da viga há uma inclinação nula. Assim, traça-se o eixo x escolhido arbitrariamente de tal modo que as 160 áreas negativas sejam aproximadamente iguais às positivas, na figura 17e. Faz-se a quarta integração usando-se as áreas da figura 17e para obtenção das ordenadas da deflexão estática y na figura 17f. Observa-se que as ordenadas da deflexão estática são negativas porque as áreas da curva dy/dx são negativas na extremidade da esquerda onde se inicia a integração. Embora estas ordenadas sejam levantadas a partir do eixo x\ traça-se o eixo x conforme indicado porque se sabe que são nulas as deflexões da viga nos apoios. Como o eixo x, traçado arbitrariamente no diagrama da inclinação da elástica figura 15e, havia dividido igualmente as áreas negativas e positivas, então o eixo x' e o x da figura 15f deveriam coincidir. Dos dados das curvas a e f, calculam-se os seguintes valores: ∑ Py 2, 94 N mm ∑ Py ∑ Py wn2 g wn 865 rad/s nc 60(865) 2 2 0, 794 ∑ Py 2 0, 0385 mm 106 8260 rpm 5.17 - VELOCIDADES CRÍTICAS DE ORDEM SUPERIOR Para rotores que tem eixos de diâmetros variáveis como no item precedente, a determinação da segunda velocidade critica e as velocidades de ordem superior quanto à flexão, e relativamente mais complexa do que o cálculo da velocidade crítica fundamental da equação (47). Os livros-texto de Timoshenko, Den Hartog e Thomson apresentam métodos para rotores com tais eixos e para um número de rotores com eixos uniformes com e sem massas concentradas. No casos de vigas uniformes simplesmente apoiadas e vigas uniformes em balanço para as quais a formula seguinte calcula as diversas freqüências naturais: wn Cn EI A g Pl 3 (49) E o coeficiente que indica a n-ésima freqüência natural, P e o peso total da viga em kg, e / e o comprimento da viga em metros. O eixo de transmissão do automóvel e eixo de bobina são exemplos de vigas uniformes simplesmente apoiadas, e as palhetas de compressores e de turbinas são exemplos aproximados de vigas uniformes em balanço. 161 Consideremos o caso da palheta do rotor mostrada na figura 18. Mostra-se a palheta como uma viga em balanço a qual sofre um ciclo de perturbação de flexão cada vez que passa por uma palheta do estator e provoca uma mudança na força aerodinâmica. Se N e o número de palhetas do estator, então a freqüência da perturbação em ciclos por minuto será o produto de N pela rotação do rotor em rpm. Quando essa freqüência coincidir com a freqüência natural fn da palheta devida à flexão, existira uma situação crítica. Para a palheta de aço mostrada na figura 16, os cálculos seguintes ilustram a determinação das diversas velocidades criticas do rotor para o caso de um estator de 30 palhetas. E IA 207 x10 3 N / mm 2 g 25,4 x3,18 3 12 bh 3 12 9810mm / s 2 I 76,2mm 68,1mm 4 p 76,5x10 6 N / mm 3 P w n1 f n1 volume c1 p EI Ag 3, 52 Pl 3 60 w n1 2 (25, 4 76, 2 3,18)(76, 5 10 6 ) 60 2 (207 10 3 ) 68,1 9810 0, 471 76, 23 2870 0, 471 N 2870 rad/s 27, 400 ciclos/min Figura 18 – Encaixe palheta e rotor 162 A velocidade crítica do rotor ocorre gerando n c1 f n1 N 27400 30 f n1 Nn c1 . 913 rpm A segunda e a terceira velocidades críticas são n c2 c2 n c1 c1 22, 4 913 5810 rpm 3, 52 n c3 c3 n c1 c1 61, 7 913 16000 rpm 3, 52 Em geral as palhetas de rotores devem ser delgadas e leves para maquinas de alta rotação e freqüentemente ultrapassam a primeira e a segunda velocidades criticas. A seleção do material e importante. Alguns materiais possuem propriedades de amortecimento melhores do que outros, e isto pode significar a diferença entre o êxito e o fracasso em ultrapassar as velocidades criticas. As palhetas geralmente são curvas e sua espessura diminui gradualmente, sendo maior na base do que na extremidade: isto torna a palheta mais rígida e aumenta um pouco a velocidade critica. Observação: não deve ser utilizado em vigas não uniformes. 5.18 - EIXOS ESCALONADOS Quando o eixo tem os diâmetros escalonados como o do rotor de dois discos mostrados na figura 22, a constante da mola torcional é variável. Pode-se determinar uma constante equivalente k t em função das constantes individuais kl, k 2, k 3...Kn. Para molas em série, o torque instantâneo T em cada seção do eixo é o mesmo. Entretanto, os ângulos de torção diferentes. O ângulo total de torção Φt é a soma de todos os ângulos individuais de torção. 3 ... 1 1 2 T kt T k1 T k2 T k3 ... T kn 1 kt 1 k1 1 k2 1 k3 ... 1 kn 1 kt ∑k n 1 (50) Para o rotor com dois discos e com eixos de diâmetro variável, pode-se substituir k t, determinado pela equação (50). 163 Figura 19 - Eixo e mancais 5.19 – EXERCÍCIOS PROPOSTOS - DIMENSIONAMENTO DE EIXOS 1. O eixo da figura suporta uma engrenagem cilíndrica de dentes retos para uma rotação de 315 rpm. O diâmetro primitivo da engrenagem é de 364 mm, t=310mm, t1=120 mm, t2=190 mm. Dimensione este eixo, calculando o valor de d. A engrenagem é enchavetada no eixo. A carga total atuando no eixo é de 15 KN. Figura 21 - Exercício proposto 1. 2. Um eixo é fabricado com aço AISI 1137, laminado a frio, e é usado em um cortador de grama. A potência é suprida ao eixo por uma correia plana à polia A. Em B, uma corrente de rolos exerce uma força vertical e em C uma correia trapezoidal também exerce uma força vertical. Nas condições de operação a correia transmite 35 HP a 425 rpm das quais 25 HP é transmitida ao cortador e 10 HP para o ventilador. As duas seções do eixo são 164 unidas por um acoplamento flexível em D e as polias são todas enchavetadas no eixo. Decida qual serão os diâmetros dos eixos, utilizando a teoria de falhas de Von Mises e o critério de Goodman. Figura 22 - Exercício proposto 2. 165 3. Um eixo S de aço AISI 1137, laminado a frio, transmite potencia que recebe de um eixo W, que gira a 2000 rpm através de uma engrenagem E de 125 mm de diâmetro à engrenagem A de 375 mm de diâmetro. A potência é transmitida de uma engrenagem C para a engrenagem G, que varia de 10 HP a 100 HP, retornando a 10 HP, durante uma rotação de do eixo S. O projeto leva em conta as tensões variáveis e a teoria da máxima tensão cisalhante TMT|C e o critério de Goodman. Para um fator de projeto n=1,8, calcule o diâmetro do eixo, utilizando somente as cargas tangenciais motoras. Figura 23 - Exercício proposto 3. 166 4. Idêntico ao anterior, exceto que as componentes radiais das engrenagens devem também ser consideradas, todas as engrenagens com ângulo de pressão 20o. 5. Idêntico ao exercício 4, exceto que a engrenagem G se posiciona em cima da engrenagem C. 6. Um pequeno eixo é fabricado com aço SAE1035, laminado a quente, recebe potência de 30 HP a 300 rpm, através de uma engrenagem de 300 mm de diâmetro, sendo esta potência transmitida a outro eixo através de um acoplamento flexível. A engrenagem é enchavetada no meio do eixo entre dois mancais, com ângulo de pressão 20o, fator de segurança n=1,5. (a) Desprezando a componente radial R da carga total W , determine o diâmetro do eixo. (b) Considerando ambas componentes radiais e tangencial, determine o diâmetro do eixo. Figura 24 - Exercício proposto 6. 167
Download