PROGRAMA EQ-ANP
Processamento, Gestão e Meio Ambiente na Indústria
do Petróleo e Gás Natural
Simulação Numérica de um Hidrociclone
Para Separação de Esferas Ocas de Lama de
Perfuração
Domícia Semele Tavares de Oliveira
Projeto de Final de Curso
Orientador
Prof. Ricardo de Andrade Medronho, PhD
Março de 2004
Simulação Numérica de um Hidrociclone para Separação de
Esferas Ocas de Lama de Perfuração
Domícia Semele Tavares de Oliveira
Projeto de Final de Curso submetido ao Corpo Docente do Programa Escola de
Química/Agência Nacional do Petróleo – Processamento, Gestão e Meio Ambiente na
Indústria de Petróleo e Gás Natural, como parte dos requisitos necessários para a
obtenção do grau de Engenheira Química com ênfase na área de Petróleo e Gás Natural
– Engenharia de Petróleo.
Aprovado por:
________________________________________
Prof., Marcelo Castier, PhD
________________________________________
Prof., Osvaldo Galvão Caldas da Cunha, PhD
________________________________________
Carlos Alberto Capela de Moraes, DSc
Orientado por:
________________________________________
Ricardo de Andrade Medronho, PhD
Rio de Janeiro, RJ - Brasil
Março de 2004
ii
Oliveira, Domícia Semele Tavares de.
Simulação Numérica de Hidrociclone para Separação de Esferas Ocas de Lama de
Perfuração / Domícia Semele Tavares de Oliveira. Rio de Janeiro: UFRJ/EQ, 2004.
vii, 93 f.; il.
(Monografia) – Universidade Federal do Rio de Janeiro, Escola de Química, 2004.
Orientador: Ricardo de Andrade Medronho.
1. Hidroclone. 2. CFD. 3. DGD / Esferas Ocas. 4. Monografia. (Graduação –
UFRJ/EQ). 5. Ricardo de Andrade Medronho (PhD).
iii
"Se as coisas são inatingíveis, ora! Não é motivo para não querê-las. Que tristes seriam
os caminhos se não fora a presença distante das estrelas." (Mário Quintana)
iv
AGRADECIMENTOS
Primeiramente agradeço a meus pais pelo apoio incondicional, pela dedicação, amor e
carinho que tanto contribuíram para minha formação pessoal e profissional, sem os
quais não teria conseguido concluir mais esta etapa de minha vida. Agradeço pelos
sacrifícios feitos com tanto amor e por acreditar em mim, mesmo nas horas em que eu
mesma não acreditava. A meus pais Odinéa Mendes e Sebastião Pereira eu dedico mais
esta vitória.
Agradeço a Luigi Trotta, meu namorado, pelas horas de sacrifício, pela compreensão da
ausência, pelo apoio, amor e força compartilhados.
Agradeço também aos meus irmãos Poliana Penélope, Diógenes Apoema e Musa
Felícia pelo carinho e pela força.
Agradeço ao meu orientador, Prof. Ricardo de Andrade Medronho, pela confiança
depositada em mim, pelo apoio e amizade adquirida no convívio ao longo de um ano.
Agradeço pela forma única e objetiva de compartilhar comigo e com todos seus alunos
seus amplos conhecimentos.
Agradeço aos meus companheiros de laboratório, Namar Barbosa de Faria e André
Gonçalves Oliveira, por compartilharem comigo suas dúvidas e descobertas, e pela
compreensão e paciência nos momentos mais difíceis. Agradeço principalmente a
Namar pela eterna amizade, pela sua bondade e seu desprendimento (compartilhando
comigo seus computadores).
Agradeço aos professores da Escola de Química que ensinam por vocação e prazer, e
que contribuem não só para a formação do profissional como também para a formação
do indivíduo. Agradeço também aos funcionários da EQ, especialmente Mário Luiz
Francisco, Ana Carreiro e Marcos Aurélio Araújo, da Informática, pela ajuda e por
estarem sempre dispostos a resolver os mais complicados problemas.
Agradeço também ao Lage e Rosana de Fátima, do CENPES/Petrobrás pelo
fornecimento dos dados necessários para o desenvolvimento deste trabalho.
Agradeço ao Prof. Eduardo Mach, à Alzirene e à Cláudia Veloso, pelo apoio junto à
ANP.
E agradeço especialmente à Agencia Nacional do Petróleo, que apoiou este trabalho
através de seu Programa de Recursos Humanos PRH-13.
v
Resumo do Projeto Final apresentado à Escola de Química como parte dos requisitos
necessários para obtenção do grau de Engenheira Química com ênfase na área de
Petróleo e Gás Natural – Engenharia de Petróleo.
SIMULAÇÃO NUMÉRICA DE UM HIDROCICLONE PARA SEPARAÇÃO DE
ESFERAS OCAS DE LAMA DE PERFURAÇÃO
Domícia Semele Tavares de Oliveira
Março, 2004
Orientador:
Prof. Ricardo de Andrade Medronho, PhD
A proximidade das curvas de pressão nos poros e de fratura em perfurações sob grandes lâminas
d'água torna a operação cara e complicada. Uma forma de minimizar este problema é através da
redução da pressão exercida pelo fluido de perfuração na base do riser de modo a originar a
condição denominada de duplo gradiente de perfuração. Uma análise da literatura sobre o tema
mostra que existem, basicamente, 3 alternativas capazes de gerar esta redução:
- Utilização de uma bomba no leito marítimo;
- Injeção de gás na base do riser e
- Injeção de esferas de baixa densidade relativa também na base do riser.
A opção da bomba é tecnologicamente complicada e de alto custo. A injeção de gás na base do
riser gera gradientes variáveis, dada à compressibilidade do gás. Desta forma, a opção,
aparentemente, mais factível tanto do ponto de vista da complexidade tecnológica quanto dos
custos envolvidos na operação consiste em diminuir a densidade do fluido de perfuração através
da injeção, no riser, de esferas ocas de baixa densidade relativa. Para resistir à pressão na base
do riser, estas esferas têm que ser fabricadas de um material compósito especial, sendo,
portanto, de alto custo. Desta forma, este processo só poderá viabilizar-se, do ponto de vista
econômico, se puder ser desenvolvido um processo eficiente de recuperação destas esferas, para
re-injeção na base do poço.
Hidrociclones são equipamentos de fácil construção e sua performance é função de sua
geometria e tamanho. Portanto, o uso deste tipo de equipamento parece ser bastante adequado à
separação das esferas ocas do fluido de perfuração. Esta adequação não se refere somente à sua
eficiência na remoção de partículas de baixa densidade mas, também, à sua alta capacidade de
processamento e ao pequeno espaço (floor space) requerido, o que o torna ideal para operações
onde o espaço é crítico, como ocorre em plataformas de perfuração.
Neste projeto, foram otimizadas as proporções geométricas de um hidrociclone, através da
simulação de 18 geometrias obtidas no planejamento experimental, com a utilização da
ferramenta chamada fluidodinâmica computacional (CFD), visando maximizar a separação de
esferas ocas de densidade igual a 0,530 g/cm3 de fluidos de perfuração de densidades de 1,25 e
1,10 g/cm3, sendo o primeiro mais viscoso que o segunda, para sua re-injeção no riser. A
geometria otimizada foi obtida por regressão linear e possui as seguintes proporções: 2,34 cm de
diâmetro de entrada e 3,40 cm de diâmetro para os diâmetros do overflow e do undeflow. Fez-se
a simulação desta geometria para cinco tamanhos de partículas, a fim de se obter sua eficiência
granulométrica reduzida e sua posterior eficiência total de separação.
vi
Abstract of a Final Project presented to Escola de Química/UFRJ as partial fulfillment
of the requirements for the degree of Chemical Engineer with emphasis on Petroleum
and Natural Gas – Petroleum Engineering.
NUMERICAL SIMULATION OF THE SEPARATION OF HOLLOW SPHERES
FROM MUD USING A HYDROCICLONE
Domícia Semele Tavares de Oliveira
March 2004
Supervisor:
Prof. Ricardo de Andrade Medronho, PhD
In deepest waters the strict proximity between pore and fracture gradient curves lead to complex
and expensive drilling operations. Dual-gradient drilling (DGD) is a hard studied technique used
to reduce this trouble, by decreasing the gradient pressure inside the riser. Currently, three forms
of DGD are available in the literature:
-
Use of marine pumps on the seafloor;
-
Injection of gas in the riser basis;
-
Injection of hollow spheres, made of lightweights compounds, in the riser basis.
Pumping mud from the seafloor is a complicated and high cost technological option. Injection
of gas in the riser basis creates non-linear gradient curves due to gas compressibility. Actually,
the option that seems to be more appropriately, analyzing operations costs and technological
complexity, is that related to the injection of lightweight hollow spheres. These spheres must be
composed of composites or other materials in order to support the high pressure at the seafloor.
At last, this system will be economically available only if it is developed a separation process
that efficiently recovers those spheres to re-inject in the riser basis.
Hydrociclones are devices of simple construction whose performance are geometry and size
dependent. Thus, its use is expected to be adequate in the recover of spheres from mud (drilling
fluid) because hydrociclones usually yield high recoveries in lightweight particles applications,
as well as the high process capability and little floor space required, ten, that advantages turn
them ideals devices in offshore drilling operations.
In this project the geometric proportions of the hydrociclones were optimized using
computational fluid dynamics (CFD), trying to achieve a maximum efficiency as possible in the
recover of hollow spheres in the DGD system, because those spheres are continually re-injected
in the riser. 18 geometries were obtained in the experimental design and they were simulated to
achieve the optimized geometry that would maximize the separation of the hollow spheres (with
0,530 g/cm3 of specific weight) from drilling mud (with 1,25 g/cm3 of specific weight) in the
riser. The optimized geometry obtained thought linear quadratic regression has these
proportions: 2,34 cm of inlet diameter and 3,40 cm of overflow and underflow diameters. That
geometry was simulated for five particle diameters, and the goal of this project is to obtain the
reduced grade efficiency and finally the global efficiency of separation to the hydrociclone
optimized.
vii
ÍNDICE
1. INTRODUÇÃO
1.1 Motivação
1.2 Objetivo
1.3 Organização do Presente Trabalho
2. PERFURAÇÃO DE POÇOS DE PETRÓLEO
2.1 Sondas e Perfuração Offshore
2.2 Tecnologias de Gradiente Duplo de Perfuração
2.3 Hidrociclones
3. TURBULÊNCIA
3.1 Introdução à Turbulência
3.2 Modelagem Matemática
3.3 Modelos de Turbulência
4. FLUIDODINÂMICA COMPUTACIONAL (CFD)
4.1 Etapas para a Solução Numérica
4.2 Solução Numérica Representativa
4.3 Malha
4.4 Métodos de Discretização
5. MATERIAIS E MÉTODOS
5.1 Computador e Pacote Computacional Utilizados
5.2 Variáveis de Interesse
5.3 Caracterização do Fluido de Perfuração
5.4 Caracterização das Partículas
5.5 Planejamento Experimental e Geometrias Simuladas
5.6 Malhas
5.7 Parâmetros Utilizados e Simulações Realizadas
5.8 Eficiência Total de Separação
6. RESULTADOS E DISCUSSÕES
6.1 Resultados Gerais
6.2 Comparação e Escolha entre Modelos de Turbulência
6.3 Regressão Linear
6.4 Simulações com a Geometria Ótima
6.5 Eficiência Granulométrica Reduzida para Geometria Otimizada
6.6 Resultados Gráficos da Geometria Otimizada e Discussões
6.7 Eficiência Global de Separação
1
1
2
2
3
3
22
41
53
53
54
57
72
73
75
77
79
82
82
82
82
83
88
90
91
93
95
95
97
98
102
103
106
109
viii
7.0 CONCLUSÕES
NOMENCLATURA
ABREVIAÇÕES MAIS UTILIZADAS
REFERÊNCIAS
ANEXO 1 – Glossário
ANEXO 2 - Malhas Utilizadas
112
114
117
118
124
126
ix
CAPÍTULO I
1. INTRODUÇÃO
1.1 Motivação
A perfuração de poços de petróleo em alto-mar tem se expandido cada vez mais para
águas mais profundas. Inicialmente, a perfuração offshore consistia na adaptação de
sondas terrestres montadas sobre uma estrutura para perfurar em águas rasas, porém,
com a crescente necessidade de se perfurar em águas mais profundas, desenvolveram-se
novas de tecnologias de ponta e técnicas de perfuração especialmente orientadas para a
perfuração marítima (Thomas, 2001).
Os sistemas de perfuração convencionais, quando usados em águas profundas, em
partes do mundo onde correntes marinhas são excessivamente fortes (Snyder, 1998)
encaram grandes desafios que tornam difícil, e até inviável, a perfuração em águas cada
vez mais profundas. Um deles é a excessiva pressão hidrostática exercida pela coluna de
fluido de perfuração no anular do poço. Para vencer este desafio, sugere-se a utilização
de um duplo gradiente de perfuração em contraste ao gradiente de perfuração único,
tecnologia utilizada na perfuração convencional (Smith et al, 2000).
Dentro deste contexto, surge um novo conceito dentro do duplo gradiente de perfuração
(DGD – dual-gradient drilling), que é a injeção de esferas ocas de baixa densidade na
coluna de retorno do sistema de perfuração, no intuito de se obter a redução da
densidade do fluido de perfuração, a partir do ponto de injeção.
Alguns problemas associados a esta tecnologia foram identificados como, por exemplo,
o tamanho das partículas esféricas, a alta pressão de colapso requerida para as esferas, a
quebra de partículas devido às altas taxas de cisalhamento, as altas concentrações de
esferas no fluido de perfuração (Vera, 2002); além disto, a introdução desta nova
tecnologia no mercado também está condicionada ao desenvolvimento, ou à otimização,
1
de um equipamento de separação capaz de maximizar a eficiência da separação das
esferas ocas do fluido de perfuração utilizado.
1.1 Objetivo
O principal objetivo deste projeto é a otimização da geometria de um hidrociclone cuja
função será maximizar a eficiência de separação das esferas ocas utilizadas na
tecnologia de duplo gradiente de perfuração. Para atingir este objetivo foram feitas
simulações em fluidodinâmica computacional, CFD.
O estudo foi iniciado com a fundamentação em conceitos de fluidodinâmica
computacional, seguido pelo domínio do software que posteriormente seria utilizado na
simulação computacional. Neste trabalho, utilizou-se o software CFX 5.6 para a
simulação de escoamentos dentro de um volume de controle, que pode ser um
equipamento, um duto ou até mesmo escoamento externo.
Foi feito um planejamento experimental, partindo de uma geometria convencional de
hidrociclones do tipo Bradley, modificando os parâmetros importantes a fim de se obter
a geometria com a maior eficiência na separação desejada. Assim, obtivemos 18
geometrias, 14 diferentes entre si, para a simulação computacional.
1.2 Organização do Presente Trabalho
O trabalho está dividido em 7 capítulos. O Capítulo I - Introdução contém a motivação e
os objetivos do trabalho. O capítulo II - Perfuração versa sobre o processo em si, além
das técnicas de duplo gradiente de perfuração; versa ainda sobre hidrociclones e sua
eficiência. O Capítulo III – Turbulência contém uma introdução ao problema da
turbulência, suas equações e os modelos envolvidos da fluidodinâmica computacional.
O Capítulo IV – Fluidodinâmica Computacional explica as etapas para resolução de um
problema, além dos métodos de discretização existentes e o utilizado. O Capítulo V –
Materiais e Métodos. O Capítulo VI – Resultados e Discussões. O Capítulo VII –
Conclusões.
2
CAPÍTULO II
2. PERFURAÇÃO DE POÇOS DE PETRÓLEO
A perfuração de poços de petróleo é feita com a utilização de uma sonda, através de
uma técnica rotativa. A formação rochosa é perfurada pela ação da rotação e do peso
aplicados a uma broca, que é acoplada à extremidade da coluna de perfuração. A ruptura
ou desagregação das rochas forma pequenas lascas, ou cascalhos, que serão removidos
do fundo do poço e carreados até a superfície pelo fluxo do fluido de perfuração
(Thomas, 2001).
2.1 Sondas e Perfuração Offshore
2.1.1
Sistemas de Sondas de Perfuração
A sonda de perfuração é divida em vários sistemas com funções específicas. São eles: o
sistema de sustentação de cargas, de geração e transmissão de energia, de
movimentação de cargas, de rotação, de circulação e de segurança de poço. Além disso,
temos os sistema de subsuperfície e outros equipamentos e ferramentas auxiliares.
3
Fig 2.1 – Sonda de Perfuração
a) Sistema de Sustentação de Cargas
O sistema de sustentação de cargas é responsável pela sustentação do peso da coluna de
perfuração, que, na perfuração em terra (onshore), transfere o peso da carga ao mastro
ou torre, este, conseqüentemente, descarrega na subestrutura e esta, por último,
descarrega na fundação ou base. Na perfuração marítima (offshore), há vários tipos de
plataformas que abrigam a sonda de perfuração, e que podem ter ou não base no fundo
do mar.
b) Sistema de Geração de Energia
O sistema de geração de energia para a plataforma é formado por equipamentos com
motores a diesel, e, na perfuração marítima devido à produção de gás, por turbina a gás.
Também se pode utilizar energia elétrica, dependendo da disponibilidade e do tempo de
4
permanência da sonda na localidade. O sistema de transmissão de energia classifica a
sonda como mecânica, devido à utilização de acoplamentos hidráulicos e embreagens,
ou diesel-elétrica, devido à utilização de motores diesel ou turbinas a gás, que também
podem receber energia elétrica.
c) Sistema de Movimentação de Cargas
O sistema de movimentação de cargas, como o nome expressa, permite a movimentação
das colunas de perfuração, revestimentos do poço e outros equipamentos. Seus
principais componentes são: guincho, bloco de coroamento, a catarina,
cabo de
perfuração, o gancho e elevador (Thomas, 2001).
- O guincho é o equipamento que recebe a energia dos motores e fornece força
para a movimentação vertical das tubulações no poço. O tambor principal enrola
/desenrola o cabo de perfuração para movimentar as cargas. Os freios principal e
auxiliar são usados para controlar as manobras. O primeiro é mecânico, o
segundo, suporta maiores cargas e profundidades, e é hidráulico.
- O bloco de coroamento é um conjunto de polias estacionárias, fixas na torre, e
que suporta as elevadas cargas transmitidas durante as operações de perfuração,
possibilitando movimentação vertical.
- A catarina é um conjunto de polias móveis, não fixas à torre. A passagem do
cabo de perfuração pelas polias da catarina e do bloco de coroamento permite a
movimentação de cargas ao longo da altura da torre, elevando ou descendo os
equipamentos no poço.
- O gancho pode ser integrado ou não à catarina, e é o elemento que segura e
suporta as cargas da coluna de perfuração e as transmite às polias. Na parte
superior se liga a catarina através de uma alça em forma de U, e na parte inferior
ao swivel e a coluna através de um gancho.
- O cabo de perfuração parte do tambor do guincho, passa pelas polias do bloco de
coroamento e catarina, por uma âncora (equipamento onde é instalado um sensor
de medição do peso aplicado sobre a coluna), e tem sua outra extremidade presa
5
a uma bobina. Ele usa a energia rotativa do guincho como energia de suspensão
para elevar as colunas de perfuração ou revestimento do poço.
- O elevador, na sua parte central, prende os tubos das colunas durante as
manobras, e é ligado ao gancho através de seus braços.
d) Sistema de Rotação
O sistema de rotação convencional utiliza a mesa rotativa, localizada na plataforma,
donde a rotação é transmitida a toda coluna de perfuração. O elemento que recebe o
torque, apoiado na mesa rotativa, e o transfere à coluna de perfuração é chamado kelly.
Neste sistema há ainda o swivel, que separa elementos rotativos de estacionários, e
possui entrada para a injeção de fluido de perfuração, no interior da coluna de
perfuração. Também existem outros sistemas de rotação não-convencionais como: o top
drive, onde o motor acoplado à catarina transmite rotação ao topo da coluna de
perfuração; e o motor de fundo, localizado logo acima da broca, que transmite o torque
pela passagem de fluido de perfuração em seu interior, esse motor pode ser de
deslocamento positivo ou uma turbina. A terceira técnica, de motor de fundo, é a mais
vantajosa, pois transmitir rotação para os tubos, a uma grande profundidade, gasta mais
energia e, na prática, é mais complicada de se realizar.
e) Sistema de Circulação
O sistema de circulação é formado por equipamentos para tratamento do fluido de
perfuração e de circulação. O fluido de perfuração é injetado no interior da coluna de
perfuração por meio de bombas, passa pela broca, retorna pelo espaço anular entre o
poço e a coluna e carreia os cascalhos até a superfície da sonda; na perfuração marítima
o fluido com os cascalhos passam no espaço anular entre o riser e a coluna de
perfuração. Na superfície ele passa para tanques, onde é acumulado e tratado para nova
injeção. Fazem parte do sistema: peneiras vibratórias (shale shakers), o desgaseificador,
o desarenador, o dessiltador, a centrífuga, o misturador e o funil de mistura. Esses
equipamentos são mais bem especificados abaixo:
6
- A peneira vibratória tem sua abertura das telas determinada pelo tipo de rocha
perfurada, e varia entre 10 e 150 mesh. A peneira extrai os sólidos de maior
dimensão do fluido de perfuração, enquanto que, os sólidos mais finos são
removidos por decantação em um tanque.
- O desgaseificador elimina o gás contido no fluido; este gás é desprendido pela
ação do movimento circular de um uma bomba centrífuga submersa.
- O desarenador remove a areia do fluido de perfuração, e é composto por um
conjunto de dois a três hidrociclones em série, alimentados por uma bomba
centrífuga. As partículas sólidas são separadas por ação de força centrífuga e
saem pela abertura inferior, para serem descartadas. O hidrociclone não tem
partes móveis, o que se movimenta é a mistura que está em seu interior.
- O dessiltador é composto por um conjunto de 8 a 10 hidrociclones de dimensões
menores do os do desarenador, e é posicionado a seguir para retirar partículas
menores, inferiores a 74 mícrons, que tenham passado pelo equipamento
anterior.
- A centrífuga extrai as partículas menores não retiradas pelos hidrociclones por
ação de força centrífuga. Ao contrário do hidrociclone esse equipamento tem
partes móveis.
- O misturador homogeneíza o fluido nos tanques por turbulência, podendo ser do
tipo agitador de fundo (com palhetas submersas no tanque) ou pistola de lama
(tubo que recebe a lama injetada por bomba centrífuga).
- O funil de mistura é por onde são adicionados os aditivos ao fluido de
perfuração.
7
Fig 2.2 – Sistema de Extração de Sólidos
f) Sistema de Segurança de Poço
O sistema de segurança de poço é formado pela cabeça de poço e de preventores. Os
preventores fecham o espaço anular do poço e podem ser de dois tipos: preventor
anular, feito em borracha; preventor de gaveta, formado por válvulas gavetas. O
principal deles é o Blowout Preventer (BOP), um conjunto de válvulas que permitem
fechar o poço quando ocorrer um acidente chamado blowout, que provoca danos aos
equipamentos da sonda, acidentes pessoais, perda parcial ou total do reservatório,
poluição e dano ao meio ambiente, entre outros. O blowout é explicado na letra “e”
deste item 2.1.4.
Fig 2.3 – Sistema de Segurança de Poço, BOP
8
g) Sistema de Subsuperfície
O sistema de subsuperfície é composto pelos elementos tubulares e pela broca.
Os elementos tubulares compõem a coluna de perfuração, são eles os comandos, os
tubos pesados e os tubos de perfuração. Suas funções são: aplicar peso ao sistema,
prover rigidez à coluna, conduzir o fluido de perfuração, garantir a inclinação e direção
do poço, etc. Explicamos suas respectivas funções abaixo, de acordo com Thomas
(2001) e Lang (1985):
- Os comandos, ou drill colars, são tubos de paredes espessas e, com diâmetro
interno inferior aos dos tubos de perfuração, e diâmetro externo superior. São
responsáveis por aplicar peso ao sistema e prover rigidez à coluna. Trabalha em
sua maior extensão sob compressão, poupando assim os tubos de perfuração.
Podem ter corpo liso ou espiralado, o que reduz o risco de pressão diferencial;
- Os tubos pesados, ou heavy weight, promovem a transição entre os comandos e
os tubos de perfuração, evitando ou diminuindo a falha por fadiga. São usados
em poços direcionais porque provocam menor torque e arraste nos trechos
inclinados, devido à menor área de contato com o poço; além disso,
proporcionam menor tempo de manobra e manuseio mais fácil;
- Os tubos de perfuração, ou drill pipes, são tubos de aço especial e de paredes
finas. Os diâmetros mais comuns são de 4 ½” e 5 ½”, e seu comprimento varia
de 18 a 45 pés. São caracterizados pelo seu peso nominal, em libras / pés, e pelo
tipo ou grau do aço, em psi. Estes tipos de tubos não podem trabalhar sob
compressão, e deve-se ter cuidado quanto à ocorrência de pressão interna,
colapso, fadiga, ranhuras, sulcos ou corrosão.
Fig. 2.4 – Comandos
9
Fig 2.5 – Tubos Pesados
Fig. 2.6 – Tubos de Perfuração
A broca de perfuração é o elemento posicionado na extremidade inferior da coluna de
perfuração que recebe peso (fornecido pelos comandos) e rotação. A broca obtém o
avanço de profundidade promovendo a ruptura e desagregação das rochas. Elas podem
ser classificadas em quatro grupos principais e possuir ou não partes móveis.
As brocas sem partes móveis são: integral de lâminas de aço, diamante natural ou
artificial, PDC – Polycrystalline Diamond Compact. As brocas de partes móveis são as
brocas de cones, usualmente tricônicas. Abaixo, os tipos de brocas existentes:
-
As de lâminas de aço foram as primeiras a serem usadas, e, por sua vez,
praticamente substituídas pelas brocas de cones, devido a sua baixa vida útil.
-
As brocas de diamantes naturais são usadas principalmente em testemunhagem,
ou em formações extremamente duras e abrasivas. Possuem um custo mais
elevado.
-
As brocas de PDC são projetadas para formações mais moles e médias com alta
taxa de penetração e maior vida útil, e para formações mais duras utilizam-se as
TSP (Thermal Stable Polycristalline), que são resistentes ao calor. As brocas de
10
diamante, natural ou PDC/TSP, são bem específicas, e projetadas para a
formação de acordo com o tamanho e quantidade de cortadores.
-
As brocas com partes móveis são as mais utilizadas devido à sua eficiência e
menor custo inicial. Podem ter um a quatro cones, e seus dentes de aço ou
insertos de tungstênio. Os cones giram em torno do seu eixo enquanto a broca
gira em torno do poço.
Fig 2.7 – Brocas Tricônicas
Fig 2.8 – Brocas de Diamantes Artificiais e Naturais
2.1.2
Classificação de Sondas para Perfuração e Produção Offshore
Existem três diferenças básicas entre a perfuração marítima e a feita em terra: primeiro,
não existem fundações na perfuração offshore; segundo, no retorno do fluido de
perfuração utiliza-se um riser para confinar o fluido e levá-lo até a superfície; terceiro, o
sistema de segurança de poço pode operar na superfície (plataformas fixas ou apoiadas
no fundo do mar), ou submerso (plataformas flutuantes).
De acordo com essas
11
diferenças e com as necessidades específicas de cada campo a ser perfurado deve-se
escolher entre os diversos tipos de sondas existentes para melhor rendimento.
A produção em campos marítimos é mais cara e complexa do que a feita em terra,
envolvendo investimentos em aquisição ou construção da plataforma, perfuração e
desenvolvimento de poços, instalação de linhas flexíveis e dutos submarinos e infraestrutura de escoamento de petróleo e gás para o continente.
Nas sondas marítimas o processo de perfuração é semelhante ao das terrestres, sendo
que seus equipamentos ficam sobre uma plataforma cujas características dependem da
profundidade e condições marítimas. São, em sua maioria, unidades móveis que se
deslocam através de propulsão própria ou com auxílio de reboques, e que devem flutuar
com segurança, mas também devem permanecer estacionadas nas coordenadas do poço
para executar as operações.
As sondas devem abrigar os sistemas descritos no item 2.1, letra a até g, além da
estocagem de material, alojamento de pessoal, e outras instalações necessárias para a
produção dos poços. Existem diferentes tipos de plataformas e estas devem ser
escolhidas de acordo com o tamanho da lâmina d’água, das condições do mar, relevo do
fundo do mar, finalidade do poço, disponibilidade de apoio logístico, e relação custo /
benefício. Explica-se a seguir os principais tipos de plataformas:
-
As plataformas fixas e auto-eleváveis possuem extensão até o fundo do mar; na
primeira, a estrutura de aço está cravada e, na segunda, a estrutura de apoio, ou
pernas, está apenas assentada no fundo. Esses dois tipos de plataformas são
utilizados para pequenas lâminas d’águas: as plataformas fixas podem ser
utilizadas em lâminas de até 300 metros, e as plataformas auto-eleváveis numa
faixa de 5 a 130 metros. As plataformas fixas têm um custo alto no projeto e
instalação. As plataformas auto-eleváveis apresentam dificuldades quanto ao
reboque, nas grandes movimentações e nas operações de elevação e
abaixamento das pernas, e devem ser instaladas em locais planos.
-
As plataformas submersíveis são apoiadas por flutuadores lastreados até o seu
casco inferior chegar ao fundo, que deve ser macio e pouco acidentado, além de
12
serem utilizadas para águas calmas, em rios, ou bacias com pequena lâmina
d’água.
-
As plataformas flutuantes são de dois tipos: semi-submersíveis e navios-sonda.
Elas sofrem ação das ondas, correntes e ventos, e por isso, devem ser
posicionadas na superfície do mar, dentro de um círculo de tolerância
determinado pelos equipamentos de superfície. Por isso elas têm dois tipos de
sistemas responsáveis pelo seu posicionamento, o sistema de ancoragem e o de
posicionamento dinâmico. A plataforma semi-submersível é apoiada por coluna
em flutuadores submersos e ancoradas por oito a doze âncoras e cabos e/ou
correntes, capazes de restaurar a posição do flutuante (Thomas, 2001). Os
navios-sonda possuem um sistema de posicionamento dinâmico, e não têm
ligação física com o fundo do mar. As plataformas flutuantes podem ter ou não
propulsão própria, possuindo grande mobilidade, e são utilizadas para lâminas
d’água de até 3.000 metros, também possuem baixo custo de projeto e
implantação comparado às plataformas fixas.
-
Outro tipo de plataforma é a Tension-Leg que são similares às plataformas semisubmersíveis em sua estrutura, sendo que suas pernas principais são ancoradas
no fundo do mar por meio de cabos tubulares. Suas pernas se mantêm
tracionadas, reduzindo seu movimento, igualando-as às plataformas fixas nas
operações de perfuração e completação.
13
Fig 2.9 – Tipos de Plataformas, fixa, auto-elevável, semi-submersível e navio sonda, respectivamente
Fig 2.10 – Plataforma Tension Leg
2.1.3
Classificação de Poços
Os poços de petróleo podem ser verticais ou direcionais. Os poços verticais não são
absolutamente verticais, pois podem possuir uma inclinação de até 5º (Thomas, 2001), o
14
poço pioneiro num campo, e o primeiro poço numa plataforma de perfuração marítima é
sempre vertical.
Os poços direcionais têm várias finalidades, dentre as quais podemos citar: controle de
um poço em blowout, perfurando poços de alívio; atingir formações abaixo de locais
inacessíveis, como rios, lagos, cidades; desviar trajetória do poço de acidentes
geológicos, como domos salinos e falhas nas formações; perfurar vários poços de um
mesmo ponto, como na produção em plataformas marítimas; desviar poços que tiveram
trecho final perdido por problemas operacionais, como prisão da coluna de perfuração.
Outro tipo atualmente em evidência por proporcionar um aumento da produtividade e da
recuperação final de hidrocarbonetos, além de possuir longo alcance, é chamado poço
horizontal – tipo III. Este possui um trecho reto que se prolonga dentro da formação
produtora, aumentando a capacidade de drenagem.
Fig 2.11 – Tipos de poços direcionais
2.1.4
Fases da perfuração – Importância das Pressões de Poros e Fratura
Uma das principais funções do fluido de perfuração é exercer pressão hidrostática sobre
as formações a serem perfuradas, sem que se frature a formação ou que haja influxo de
fluidos para o poço. A pressão nos poros é a pressão dos fluidos no interior dos poros
das rochas da formação e dos reservatórios e, a pressão de fratura é a pressão requerida
no interior do poço para iniciar a fratura da formação e perda de circulação (Traugott,
1997). Sob altas pressões hidrostáticas, exercidas pela lama, o fluido de perfuração
15
penetrará na formação podendo ocorrer perda de circulação. Sob baixa pressão
hidrostática, ou seja, quando a pressão do fluido de perfuração for menor que a pressão
dos poros, e sendo a formação permeável, os fluidos de dentro da formação penetrarão
no poço. Quando esse influxo for controlável diz-se que o poço está em kick; se
incontrolável, diz-se em blowout.
Um poço é perfurado em fases, que dependem de sua profundidade final e das
características das formações a serem perfuradas. Os poços de petróleo têm,
normalmente, de três a oito fases, sendo que, em cada fase concluída, a coluna de
revestimento é fixada e cimentada. O número de fases e o comprimento das colunas de
revestimento são determinados em função das pressões de poros e de fratura previstas
(Thomas, 2001), pois se trabalha entre essas duas curvas de pressão.
Perfurar na estreita faixa entre as curvas de pressão de poros e de fratura é muito difícil,
pois é necessário manter-se a pressão hidrostática do fluido de perfuração entre essas
duas curvas ao longo do poço. Este é um dos principais problemas encontrados na
perfuração em águas profundas, ao lado do problema de instabilidade do riser
(explicado na seção 2.2.2).
A técnica de duplo gradiente de perfuração muda a direção da curva de pressão
hidrostática do fluido de perfuração, que na técnica convencional consiste em uma linha
reta entre as curvas de pressão de poros e de fratura; esta linha se estende da superfície
do fundo do mar até o fundo do poço na perfuração convencional, e na perfuração com
DGD se estende do fundo mar até o fundo do poço. Daí a necessidade de menor número
de fluido e de revestimentos, ou seja, teremos menos fases na perfuração de um poço
(Vera, 2002).
16
Fig. 2.12 – À esquerda, perfuração convencional (com o gradiente de pressão se estendendo até a superfície); à
direita, perfuração com duplo gradiente (com o gradiente de pressão se estendendo até o fundo do mar)
No exemplo da figura, com a técnica DGD necessita-se de menos fases na perfuração,
portanto, de menos revestimentos, também é igualmente reduzido o número de lamas de
diferentes densidades utilizadas para se perfurar. Esse sistema será útil tanto para as
últimas fases da perfuração quanto para as primeiras duas fases, pois permitirá uma
redução no peso da lama de 3 a 5 ppg; nas seções mais profundas será útil, pois a
perfuração não exigirá o uso das lamas mais pesadas (14 a 18 ppg); nas seções
superficiais será favorável porque sua perfuração convencional requer lamas leves, com
pesos específicos tipicamente menores que 14 ppg.
17
2.1.5
Fluido de Perfuração
Fluidos de perfuração são misturas de componentes líquidos, sólidos e até mesmo
gasosos que possuem características específicas para execução de suas funções na
perfuração. Dentre suas funções podemos citar (Thomas, 2001):
-
Limpar o fundo do poço dos cascalhos gerados pela broca, e transporta-los até a
superfície;
-
Exercer pressão hidrostática sobre as formações, evitando o influxo de fluidos
indesejáveis, genericamente chamados de kick;
-
Estabilizar as paredes do poço evitando desmoronamento;
-
Resfriamento e lubrificação da coluna de perfuração e da broca.
As características intrínsecas destes fluidos dependem prioritariamente das funções
realizadas pelo mesmo e do tipo de formação a ser perfurada. Estes são preparados e
especificados de forma a garantir uma perfuração rápida e segura. Podemos citar
algumas de suas características desejáveis (Thomas, 2001):
-
Ser estável quimicamente;
-
Promover estabilidade mecânica e química nas paredes do poço, o que depende
diretamente do tipo de formação;
-
Facilitar a separação dos cascalhos na superfície;
-
Manter os sólidos de sua constituição em suspensão quando em repouso;
-
Ser inerte às rochas produtoras, não lhes causando danos;
-
Aceitar tratamento físico e químico;
-
Ser bombeável;
-
Ter baixo grau de corrosão e de abrasão em relação aos equipamentos de
perfuração – coluna de perfuração, riser e equipamentos de circulação;
18
-
Facilitar interpretações geológicas do material retirado do poço;
-
Apresentar custos compatíveis com a operação.
Os fluidos de perfuração são classificados segundo sua composição, e o principal
critério é a fase contínua ou dispersante utilizada como base. Eles se classificam como
fluido à base de água, óleo, ar ou gás. Vale ressaltar que os mais utilizados são os
fluidos à base de água (Thomas, 2001), também foi o tipo utilizado para as simulações
deste projeto.
a) Fluidos à base de água (Thomas, 2001)
São fluidos cuja fase contínua e o seu principal componente é a água, que pode ser doce,
dura ou até mesmo salgada. A sua composição é o principal fator para o controle de
suas propriedades.
A principal função da água como fluido contínuo é promover a dispersão dos materiais
coloidais. Também estão dispersos sólidos ativos ou inertes. Os materiais coloidais são
as argilas e polímeros, que controlam viscosidade, limite de escoamento, forças géis e
volume de filtrado com uma alta taxa de remoção de sólidos perfurados e capacidade de
estabilização das paredes do poço. Os sólidos ativos são materiais argilosos, cuja função
principal é de aumentar a viscosidade o fluido. Os sólidos inertes adensam o fluido de
perfuração, para que se possa perfurar a maiores profundidades, e se originam de
detritos finos de rochas perfuradas ou outros materiais industrializados.
Entre os fatores que influenciam na seleção da água para preparo do fluido de
perfuração indicamos o custo de transporte (pesa muito na perfuração marítima), o custo
do tratamento, as formações geológicas a serem perfuradas, os produtos químicos
adicionados ao fluido, o equipamento e a técnica de perfuração a serem utilizas na
avaliação das formações.
Pode-se produzir fluidos especiais, chamados inibidos, e que possuirão funções
específicas. Dentre eles citamos:
19
-
Fluido à base de água com adição de cal, ou sais NaCl, KCl e CaCl2, para baixar
a solubilidade de formações rochosas salinas na água;
-
Fluidos à base de água emulsionados com óleo, que evitam a perda de circulação
em zonas de baixa pressão de poros ou de fratura;
-
Fluidos à base de água com baixo teor de sólidos, usados para aumentar a taxa
de penetração da broca em formações mais duras, reduzindo o custo total da
perfuração.
b) Fluidos à base de óleo (Thomas, 2001)
Os fluidos de perfuração são classificados como fluidos à base de óleo quando sua fase
contínua, ou a fase dispersante, é formada por hidrocarbonetos líquidos. A fase
descontínua é composta por pequenas gotículas de água dispersas, ou de solução
aquosa. Também estão dispersos sólidos orgânicos ou inorgânicos.
São fluidos excelentes para: perfuração de poços de alta pressão e temperatura, para
formações de folhelhos argilosos e plásticos, formações salinas, formações de arenitos
produtores, poços direcionais delgados ou de longo afastamento, formações com baixas
pressões de poros ou de fratura.
Suas vantagens podem ser enumeradas como:
-
Possuem grau de inibição elevado em relação às rochas ativas; são usados
quando a água for reativa com a rocha, ex: formações rochosas salinas;
-
Possuem taxa de corrosão baixíssima;
-
Possuem grau de lubricidade elevado, isto é, são bons lubrificantes;
-
Intervalo amplo de densidade, variando de 0,89 a 2,4 g/cm3;
-
Possuem baixíssima solubilidade de sais inorgânicos;
Suas desvantagens em relação aos fluidos à base de água são:
20
-
Dificuldade na detecção de gás no poço, pois este se solubiliza na fase contínua;
-
Baixa taxa de penetração;
-
Mais poluente;
-
Dificuldade no controle da perda de circulação;
-
Maior custo inicial.
c) Fluidos à base de ar ou gás (Thomas, 2001)
Os fluidos de perfuração são classificados como fluidos à base de ar ou gás quando o ar
ou gás é usado como fluido circulante. Utiliza-se ar comprimido ou nitrogênio como
fluido.
São fluidos excelentes para perfuração com zonas de perdas de circulação severas e
formações produtoras de baixas pressões, ou muito suscetíveis a danos, também são
utilizados em locais com escassez de água. Essa técnica permite aumentar a taxa de
penetração em formações duras, estáveis ou fissuradas. Não são bons fluidos para
perfuração em formações que produzam elevadas quantidades de água ou de
hidrocarbonetos.
A espuma, dispersão de gás em líquido estabilizada por um tensoativo denominado
emulsificante, por sua alta viscosidade, é empregada quando se necessita de uma
eficiência elevada de carreamento de sólidos.
21
2.2 Tecnologias de Gradiente Duplo de Perfuração
O conceito de duplo gradiente de perfuração, dual-gradient drilling (DGD), foi
introduzido ao final da década de 60 e início da década de 70, com o objetivo de
resolver alguns problemas freqüentes na perfuração offshore (Vera, 2002), além de
viabilizar economicamente a extração de petróleo em algumas reservas tidas como
marginais.
Os altos preços atingidos pelo petróleo nas sucessivas crises dos anos 70 e 80 resultaram
numa inversão da prioridade dos investimentos no sentido do downstream para o
upstream, que culminou no desenvolvimento de tecnologias offshore para águas cada
vez mais profundas e na viabilização de reservas petrolíferas até então não econômicas.
A necessidade de inovações tecnológicas para atingir maiores alvos em profundidade e
viabilizar a extração em reservas de petróleo que são hoje inviáveis, levou a novos
estudos para se otimizar ou desenvolver as técnicas já existentes de gradiente duplo de
perfuração. Dentre os novos conceitos, surge o da utilização de esferas ocas de baixa
densidade injetadas no riser com o intuito de se diminuir a densidade média do fluido
no riser.
Outro aspecto importante e que se deve atentar no desenvolvimento dessas tecnologias
para águas profundas é o revestimento. Devido à alta pressão na cabeça do poço,
imposta pelo peso do fluido de perfuração, as operações de perfuração convencionais
com riser (CRD – conventional riser drilling) requerem numerosos revestimentos. As
técnicas existentes de duplo gradiente de perfuração, explicadas a seguir no item 2.2.1,
reduzem o número de revestimentos necessários para a perfuração, pela redução do
número de fases necessárias no poço.
2.2.1
Conceito e Vantagens do DGD
O duplo gradiente de perfuração tem por objetivo reduzir a pressão na base do riser
para, idealmente, atingir uma pressão menor ou igual àquela que seria obtida se o riser
22
estivesse cheio apenas com água do mar. A técnica, em si, consiste em controlar a
pressão do fundo do poço, bottomhole pressure, pela manipulação de dois gradientes de
pressão: um, mais pesado, que vai do fundo do poço ao leito do fundo do mar (Fig. 2.12
- mudline); e outro gradiente, igual ao que seria obtido com água do mar, que se estende
da superfície até o fundo do mar; de acordo com Smith et al (1999), Escobar (1999) e
Forrest et al. (2001). A técnica de duplo gradiente de perfuração (DGD) permite que se
tenha uma pressão hidrostática no fundo do poço igual à obtida através da técnica
convencional (CRD), porém, esse novo arranjo leva a um efeito similar ao que seria
observado caso os equipamentos de perfuração estivessem instalados no fundo do mar
(Smith et al, 2000).
O gradiente duplo de perfuração simula uma situação que seria obtida se a plataforma
estivesse no leito marinho, como mostra a figura 2.13 (Kingdom, 2004).
Perfuração
Convencional
Perfuração com
Gradiente Duplo
Fig. 2.13 – Comparação entre a Perfuração Convencional e DGD
Uma das vantagens dessa nova configuração é redução do número de fases na
perfuração (ver item 2.1.4 sobre fases de perfuração), o que, conseqüentemente,
reduzirá o número de camadas de revestimento (casing strings) necessárias na
perfuração de um poço. Isto ocorre porque, como se obtém um efeito similar ao de
23
equipamentos instalados no fundo do mar, as curvas de pressão de poros e de fratura
têm uma margem menos estreita, pois sua referência agora é o leito do fundo do mar.
A redução no número de revestimentos traz muitas vantagens (Smith et al, 1999), entre
elas a de permitir que se atinjam maiores profundidades, e que se aumente o tamanho
final do poço e que se coloque tubos mais largos, facilitando as operações de
completação mais complexas. Além disso, permite a economia de aproximadamente U$
1 milhão por cada revestimento eliminado (Gault, 1999).
Outras vantagens do gradiente duplo foram citadas por MacLeod (1976), Gault (1996),
e Choe et al (1997) e entre elas estão: capitalização de recursos e de tempo, menor peso
suportado pela sonda, menor espaço requerido na sonda, pressões mais baixas na bomba
de lama de superfície, minimização dos problemas de perda de circulação, maior
eficiência na perfuração devido ao aumento na margem entre o gradiente de fratura e do
peso efetivo do fluido de perfuração, maior eficiência na completação devido a maiores
diâmetros no poço, permite a entrega mais rápida do poço, maior produtividade, melhor
controle do poço, e operações mais seguras.
2.2.2
Lifting Mecânico ou Diluição da Lama de Retorno
Existem duas categorias principais que agrupam os métodos existentes para se atingir o
duplo gradiente de perfuração: lifting mecânico e diluição da lama que retorna do anular
do poço.
Um problema comum à técnica convencional de perfuração está relacionado ao uso de
risers nas operações de perfuração offshore em grandes profundidades, pois, apesar do
seu uso freqüente e, até mesmo, com sucesso em profundidades maiores que 2.000 m
(7.000 ft )) é impraticável se extrapolar a sua utilização, com as tecnologias disponíveis
hoje em dia, para profundidades de 3.000 m (10.000 ft) (Choe, 1997, 1998 e 1999) em
diante.
24
Dentre os problemas associados à utilização de risers estão a necessidade de sondas
adequadas para suportar o peso excessivo e o espaço requerido para o equipamento e
seus acessórios (Choe, 1997, 1998 e 1999). O riser é também exposto a severas tensões
resultantes de seu peso e do peso do fluido, do movimento da linha suspensa, e das
correntes marítimas no fundo e na superfície. A espessura da parede do riser deve
aumentar para poder lidar com essas tensões, e resistir a altas pressões internas de
ruptura provocadas pelo peso do fluido. Todos esses fatores contribuem
significativamente para aumentar o custo das unidades que compõem o riser, de acordo
com o aumento da profundidade (Choe, 1999).
Uma forma de equacionar estes problemas é pela utilização de uma técnica nãoconvencional de perfuração chamada Riserless Drilling. Esta técnica, ao invés de
utilizar um riser de largo diâmetro e concêntrico com a coluna de perfuração, utiliza um
tubo de diâmetro relativamente pequeno como linha de retorno da lama, transportando-a
do fundo do mar para a superfície. O conceito do riserless drilling é o conceito do
gradiente duplo de perfuração e esta técnica é aplicada na perfuração DGD com Lifting
de Lama e apesar da injeção de gás e de esferas ocas serem primeiramente mostradas
com a utilização de risers convencionais, esses sistemas podem também ser riserless, ou
seja, com a linha de retorno de lama separada da coluna de perfuração e de menor
diâmetro.
Um problema associado à operação com duplo gradiente de perfuração - DGD, está
relacionado ao gerenciamento do efeito do tubo em U. No duplo gradiente de
perfuração, a pressão hidrostática dentro da coluna de perfuração é maior que a do
espaço anular, pois dentro da coluna o gradiente de pressão é simples, isto é, devido
somente à coluna de lama. Por esta razão, toda vez que a bomba da superfície for
desligada, em qualquer tipo de sistema DGD – esferas ou bombeamento de lama, o
nível da lama na coluna de perfuração irá cair e do riser irá subir, até que o equilíbrio
seja atingido (Vera, 2002). O efeito do tubo em U pode ser mecanicamente evitado pelo
uso de uma válvula que atue dentro da coluna de perfuração (Smith et al, 2000). Esta
válvula impede o fluxo quando a bomba de superfície de circulação de lama for
desligada.
25
2.2.2.1 Lifting Mecânico da Lama
Fundamentalmente, este sistema consiste na elevação da lama que retorna pelo anular
do poço até a superfície, através do emprego de um sistema de bombas de subsuperfície
instaladas no fundo do mar. O duplo gradiente de perfuração é atingido pela aplicação e
manutenção de uma pressão hidrostática na lama, pois a lama que retorna é
redirecionada do anular por um desviador submerso (subsea diverter) para a sucção da
bomba submersa. No sistema de Lifting, ou bombeamento da lama, a proposta é que a
lama que retorna seja coletada no leito do fundo do mar, numa pressão hidrostática igual
à do fundo do mar, e que ela seja bombeada até a superfície para que seja recirculada.
O lifting mecânico da lama de perfuração é o conceito de duplo gradiente mais estudado
até hoje. Os maiores projetos que envolvem esse conceito são, segundo Vera (2002) e
Maurer Technology (2003): Subsea Mudlift Drilling – SMD; DeepVision Project; e
Shell’s Subsea Pumping System - SSPS. Entre eles, a tecnologia SMD é a única que já
foi testada em campo, e os outros estão em estágios avançados de desenvolvimento.
Os sistemas de Lifting de Lama diferenciam-se entre si principalmente pelas bombas
submersas utilizadas para executar essa função: bombas centrífugas, bombas elétricas
submersíveis, e bombas do tipo diafragma.
As desvantagens desse tipo de sistema são seu alto custo e a baixa confiabilidade com
relação aos problemas inerentes à manutenção de um sistema complexo de
bombeamento em operação no fundo do mar (Maurer Technology, 2003).
26
Fig. 2.14 – Lifting mecânico da Lama de Perfuração
A seguir apresenta-se uma descrição mais detalhada de três projetos de lifting de lama.
a) Subsea Mudlift Drilling (SMD)
É um projeto de parceria (Joint Industy Project - JIP) entre as empresas
CONOCO e HYDRIL (Smith et al, 2000).
Usa um sistema com três a seis bombas de diafragma de deslocamento
positivo, de 80 galões por minuto cada.
As bombas são acionadas hidraulicamente por água do mar pressurizada,
que chegam da superfície através de uma linha de 5 a 6 in – ID anexada
ao riser. Essas bombas trabalham em modo automático e, por isso, elas
partem ou param de acordo com a pressão no topo do anular do poço.
Não necessita de cabos elétricos ou equipamentos submersíveis
complexos.
27
A lama é desviada do anular do poço por um divisor de rotação submerso
(SRD - Subsea Rotanting Diverter).
Depois do divisor e antes da passagem pelas bombas, a lama com os
cascalhos passam por um britador que reduz o tamanho das partículas
para até 1 ½ in de diâmetro.
Usa uma linha de retorno (riser de retorno da lama) de 5 a 6 in – ID.
Usa uma válvula DSV (drill string valve – válvula de retenção da
perfuração) localizada próxima à broca, para evitar o efeito do U-tube.
SMD foi testado com sucesso no final de 2001 e está em vias de ser
comercializado.
Fig. 2.15 – SMD (Hydril e CONOCO)
b) Deep Vision
É um projeto de parceria (Joint Industy Project - JIP) entre as empresas
BAKER Hughes e TRANSOCEAN Sedco Forex, iniciado em 1997;
28
posteriormente, na fase III do projeto, que engloba teste dos
componentes e comercialização, a Chevron se juntou àquelas empresas.
Usa um sistema de bombas centrífugas de múltiplos estágios operando
em série. As bombas são acionadas eletricamente.
Um sistema com isolamento mecânico, Mechanical Seawater-Mud
Isolation System, separa e define o exato local de separação do anular do
poço do riser de retorno da lama.
Inclui lâminas de trituração que quebra as partículas em tamanho
menores que 0,5 in de diâmetro.
Um tubo flexível de largo diâmetro está sendo desenvolvido para
permitir uma circulação contínua.
O peso específico máximo admitido para lama é de 19,2 ppg (pounds per
gallon).
Usa uma válvula que fecha a coluna de perfuração para evitar o efeito do
tubo em U.
A figura abaixo mostra um equipamento para profundidade de 10.000 ft, que utiliza 5
bombas centrífugas (4.050 hp) e que pesa 350.000 lb.
29
Fig. 2.16 – Sistema Deep Vision
Fig. 2.17 – Bomba Centrífuga Utilizada nos Sistema Deep Vision
c) Shell’s Subsea Pumping System (SSPS)
A Shell desenvolve esta tecnologia.
Usa um sistema de bombas elétricas submersíveis (ESPs – seafloor
electric-submersible pumps) que operam em série. As bombas do SSPS
são parecidas com as bombas ESPs utilizadas para o bombeamento de
óleo e de água em poços de óleo.
30
Um leito de nitrogênio separa o poço do sistema de bombeamento
submerso e assegura que a pressão no espaço anular esteja equalizada
com a pressão hidrostática da água do mar.
As argilas aglomeradas “gambo” e os cascalhos maiores que 0,25 in são
separados da lama de perfuração no local (fundo do mar), e são
descartadas na água. Esta configuração é desfavorável ambientalmente
(poluidora), já que, o ideal seria que não houvesse descarte no mar.
É um sistema é projetado para uma fácil detecção de kicks, comparado
aos outros sistemas de DGD, pois nele a maneira de se detectar é a
convencional, quando os BOP são fechados (item perfuração). A lama
contendo gás é circulada num desgaseificador, então, o gás sai por um
vent e a lama retorna a um tanque onde é bombeada para a superfície.
Os testes para os principais componentes foram completados
recentemente.
Fig. 2.18 – Sistema da Shell
As referências para o subitem 2.2.2.1, letras a, b e c são Smith et al. (1999), Smith et al.
(2000), Maurer Technology (2003) e Vera (2002).
31
2.2.2.2 Diluição da Lama
A segunda forma utilizada para se atingir um gradiente duplo de perfuração consiste na
alteração da densidade da lama de perfuração pela injeção de componentes mais leves.
A técnica em si consiste na diluição da lama que retorna pelo riser, com o auxílio de
componentes leves como, por exemplo, gás e esferas ocas. Esses componentes de baixa
densidade, quando misturados a outro mais pesado, diminuem sua densidade, de acordo
com a concentração empregada. A concentração requerida é definida pela concentração
da lama que retorna pelo riser, sendo que, o conceito de DGD requer que a pressão
hidrostática no riser seja igual à pressão hidrostática da água do mar, que possui
densidade de 8,6 ppg. Em alguns casos a densidade requerida no riser pode ser maior ou
menor que 8,6 ppg, dependendo das curvas de pressão de poro e de fratura do campo.
a) Gas Lift – Injeção de Gás
Características e vantagens do sistema de injeção de gás:
Utiliza nitrogênio como fluido para baixar a densidade da lama.
Necessita de espaço para armazenagem dos grandes volumes de gás;
Utiliza grandes compressores;
O gás que sai dos compressores é injetado numa linha lateral que sai da
plataforma na superfície e é ligada ao riser no fundo do mar, logo após os
equipamentos de segurança;
Atinge o gradiente duplo de perfuração sem modificações no riser;
Não têm problemas com controle elétrico de bombas, e com utilização de
cabos ou outros equipamentos submersos complexos;
32
Segundo McDonald et al e Vera (2002), as desvantagens do sistema de injeção de gás
são:
Alto custo com a utilização de compressores;
Alto custo com nitrogênio (gás injetado);
Problemas de controle de pressão ao longo da profundidade, pois devido
à compressibilidade do gás seu gradiente de pressão torna-se não-linear;
Dificuldades com a desgaseificação da lama antes de sua re-injeção no
poço. Os separadores existentes são grandes e ineficientes na
manipulação de fluido/gás/sólidos;
Grande espaço (floor space) requerido nas plataformas, devido à
utilização de grandes compressores e da armazenagem de grandes
volumes de gás.
Fig. 2.19 – Sistema de Gás Lift
33
b) Injeção de Esferas Ocas de Baixa Densidade
A companhia americana Maurer Techonology desenvolveu um novo conceito na técnica
de gradiente de perfuração chamada de Multi-gradient ou Curved Gradient, que
consiste na injeção de materiais leves como, por exemplo, esferas ocas, gases e sólidos
leves em um ou mais pontos no riser. Esses pontos estão submersos e a injeção desses
materiais leves produz um gradiente curvo que permitem a utilização do mesmo
revestimento ao longo de maiores distâncias (Maurer Techonology, 2003),
possibilitando a manutenção da pressão entre as curvas de pressão de poro e de fratura,
reduzindo o número necessário de fases na perfuração.
Tradicionalmente, esferas ocas feitas de vidro (HGS – Hollow Glass Spheres) eram
usadas em cimentos (Smith et al., 1980) como materiais redutores de densidade para
obtenção de massas aquosas ultraleves de cimento, que eram utilizadas na cimentação
de poços, para poder reduzir a pressão hidrostática exercida em formações frágeis.
As esferas ocas também estão sendo utilizadas para produzir uma perfuração com
pressões hidrostáticas abaixo da pressão nos poros, chamada perfuração sub-balanceada
ou underbalanced drilling, de acordo com Maurer et al. (2001).
Uma suspensão concentrada de esferas ocas é bombeada pelas bombas de superfície no
ponto (A) da Figura 2.20, na sonda de perfuração, e chega ao fundo através de uma
linha lateral de fluxo (B) ao riser, e se comunica com ele através do ponto de mistura
acima dos equipamentos de segurança do poço, sendo injetadas no riser no ponto (C).
Elas são diluídas na lama durante sua trajetória pelo anular do riser (D). Inicialmente,
quando a lama, os cascalhos e as esferas retornam à superfície, eles são transferidos ao
separador (E), onde os cascalhos serão extraídos, e, posteriormente, as esferas serão
separadas lama, que, eventualmente, sofrerá um tratamento nos tanques de lama e será
reinjetada novamente no poço pelas bombas em (F). A figura abaixo mostra o sistema
de esferas ocas (Maurer Technology, 2003).
34
F
F
A
D
B
C
Fig. 2.20 – Tecnologia DGD com esferas ocas
A técnica de injeção no riser é similar à utilizada no sistema de injeção de gás, porém as
vantagens do sistema com esferas ocas sobre o sistema de gás são grandes, e se
baseiam, na sua maioria, nas propriedades das partículas utilizadas. O sistema DGD
com injeção de esferas ocas também é vantajoso em relação aos sistemas com
bombeamento de lama, devido à ausência dos sistemas submersos, dentre outras
vantagens.
São listadas, a seguir, as vantagens do sistema de esferas ocas com perfuração de duplo
gradiente:
-
As esferas são incompressíveis e, por isso, o gradiente de pressão hidrostática da
mistura (lama + esferas) é linear;
-
Também devido à sua incompressibilidade, essa configuração necessita de
menos potência de bombeamento;
-
Sobre o sistema de gás lift é vantajoso, pois elimina o gás que fica alojado nas
bombas de fundo, não necessita de compressores ou de nitrogênio, que elevam o
custo da configuração daquele sistema;
35
-
O sistema reduz ou elimina a necessidade de bombas submersíveis, pois pode
ser um sistema com ou sem o riser convencional;
-
Elimina os complexos equipamentos de fundo necessários para outras técnicas
DGD;
-
Elimina as linhas e cabos elétricos e hidráulicos que se estendem da superfície
até o fundo;
-
O sistema aproveita as bombas de superfície convencionais;
-
Não há o inconveniente de os cascalhos e outros fragmentos de rocha passaram
pelo sistema de bombas;
-
Fácil detecção de kiks e de controle dos poços;
-
Manutenção do gradiente mesmo durante operações de conexão;
A concentração de esferas na lama de perfuração está operacionalmente limitada a uma
faixa entre 25 e 35% para a configuração da Figura 2.20, em que se apresenta somente
um ponto de injeção de esferas no riser. Para concentrações volumétricas maiores de até
50% deve-se utilizar esquemas alternativos de injeção. Dentre esses sistemas
alternativos, a Maurer Technology (2003) sugere a utilização de um esquema com gás
lift para complementação da diluição da lama, ou sistemas com mais de um ponto de
injeção de esferas.
A Maurer Technology é a detentora desta tecnologia, com os estudos iniciados em
2001, e a de Vera (2002) vem auxiliar estes estudos através da discussão da viabilidade
técnica da utilização de esferas ocas na perfuração com duplo gradiente.
36
2.2.3
Propriedades das Esferas Ocas de Baixa Densidade
As esferas ocas disponíveis no mercado podem ser constituídas de vidro, plástico,
compósito, metal, etc. Muitas indústrias produzem comercialmente esferas ocas, e todas
elas diferem nas propriedades finais: densidade, pressão de colapso, faixa de tamanhos,
temperatura de fusão e composição.
As esferas de compósito são muito utilizadas em operações que envolvam empuxo em
riser offshore e possuem composição e propriedades bem uniformes (Maurer
Technology, 2003).
A Tabela 2.1, abaixo, lista as principais esferas comercializadas de compósitos:
Tabela 2.1 – Propriedades de Esferas de Compósitos (Maurer, 2003)
Densidade do Sistema (g/cm3)
Profundidade
da Água (ft)
Macroesferas
Miniesferas
Miniesfersas
Termoplásticos
GRE
Fibra Carbono
PVC
1.000
0,25
0,28
2.000
0,36
0,34
0,40
3.000
0,36
0,41
4.000
0,39
0,45
5.000
0,43
0,48
0,43
6.000
0,44
0,51
0,45
7.000
0,48
0,55
0,46
8.000
0,53
0,60
0,48
9.000
0,53
0,62
0,50
0,65
0,53
10.000
11.000
0,56
12.000
0,59
13.000
0,61
15.000
0,66
O conceito de duplo gradiente de perfuração desenvolvido por Maurer Technology JIP
(2003) envolve a utilização de esferas de diâmetro maiores que os existentes hoje em
37
dia (> 100 µm), pois um dos gargalos mais importantes dessa tecnologia é a separação
dessas esferas da lama de perfuração.
A Balmoral desenvolveu para este sistema DGD específico, esferas ocas com as
seguintes propriedades: diâmetro em torno de 10mm, densidade de 0,43 a 0,66 g/cm3 e
suportando pressões de até 6.500 psi, em profundidades de até 15.000 ft. A 3M também
desenvolveu esferas com uma faixa de diâmetro de 2,0 a 3,0 mm.
As esferas ocas devem ser estáveis quimicamente, não devem modificar as propriedades
da lama de perfuração, devem ser menos densas que o fluido para poderem diminuir sua
densidade, além de não quebrarem quando expostas às forças e pressões exercidas pelo
sistema de bombeamento. Suas propriedades químicas desejáveis são: estabilidade,
baixa alcalinidade, não-combustíveis, não porosas, e resistentes à água.
2.2.3.1 Pressão de Colapso das Esferas Ocas
A pressão de colapso numa esfera define sua durabilidade em águas profundas. Pois,
essas partículas estão expostas a condições severas de pressão e cisalhamento. Elas
devem permanecer durante vários ciclos sendo injetadas e retornando pelo riser, além de
passar por sistemas de separação e de bombeamento.
Quanto maior a resistência requerida, maior será a pressão de colapso, levando a
espessuras de parede maiores. A espessura de parede numa esfera oca influi diretamente
em sua densidade, segundo a equação:
⎧b3 − a 3 ⎫
⎬
3
⎩ b
⎭
ρs = ρm ⋅ ⎨
(2.1)
Onde ρ e ρm são, respectivamente, as densidades da esfera oca e do material que a
compõe, e a e b são, respectivamente, os diâmetros internos e externos das esferas.
A equação que define a pressão de colapso numa esfera é (Roark e Young, 1975):
38
Pc =
2σ m
3
⎧b3 − a 3 ⎫
⎨
⎬
3
⎩ b
⎭
(2.2.a)
Substituindo a equação (2.1) na equação (2.2.a) encontramos a equação abaixo:
Pc =
2σ m ρ s
3ρ m
(2.2.b)
Onde Pc é a pressão de colapso, σm é a tensão de cisalhamento, ρm é a densidade do
material, e a e b são, respectivamente, os diâmetros internos e externos das esferas.
A pressão máxima a que as esferas estão expostas é a pressão devido à coluna de lama
do anular e às perdas por fricção no riser. Às perdas são, geralmente, de poucos psi: 2,7
psi/1.000 ft para concentração de 60% de esferas, em lama de 10,75 ppg, para riser de
grande diâmetro; ou de 42 psi/1.000 ft para riser de 6.0 in; 108 psi/1.000 ft para riser de
4.5 in (Vera, 2002).
A equação que descreve a pressão na base do riser (no fundo do mar), é a seguinte:
Pmar = 0,052 ⋅ ρ riser ⋅ Dw + ∆p riser
(2.3)
Onde Pmar (psi) é a pressão no fundo do mar, ρriser (ppg) é densidade da lama no riser,
∆priser é queda de pressão por atrito (psi), e Dw (ft) é a profundidade da lâmina d’água.
2.2.3.2 Diluição de Esferas Ocas
Sugere-se para injeção das esferas a utilização de água do mar ou de lama de perfuração
como fluido carreador, como explicado a seguir.
No sistema de injeção de esferas, onde o fluido carreador é a água do mar, as esferas
serão separadas no fundo do mar antes da injeção, como mostra a configuração da
39
figura (2.21), então, a densidade da mistura de lama e esferas no riser pode ser calculada
pela seguinte fórmula (Vera, 2002):
ρ riser = (1 − C v )ρ lama + C v ρ s
(2.4)
Onde ρriser, ρlama e ρs são as densidades da mistura no riser, lama e das partículas,
respectivamente. Cv é a concentração volumétrica das esferas na mistura.
No sistema de injeção de esferas, onde o fluido carreador é a lama de perfuração (Figura
2.21), e não há separação antes da injeção, logo, a densidade da mistura de lama e
esferas no riser pode ser calculada pela seguinte fórmula (Vera, 2002):
ρ riser =
ρ lama ⋅ q + ρ mistura ⋅ Q s
q + Qs
(2.5)
Onde ρriser, ρlama e ρmistura são as densidades da mistura no riser, lama e da mistura da
linha de injeção de lama concentrada em partículas, respectivamente. Qs é vazão na
linha de injeção, e q é a vazão de lama que sai da coluna de perfuração e passa pela
broca, antes do ponto de injeção.
Fig. 2.21 – Sistema de injeção de esferas ocas, à esquerda, utilizando lama de
perfuração, e à direita, usando água do mar como fluido carreador
40
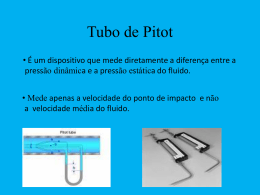
2.3 Hidrociclones
O hidrociclone consiste de uma seção cônica acoplada a uma seção cilíndrica, na qual se
encaixa a entrada tangencial que alimenta o equipamento. Na parte superior do
hidrociclone há um tubo de saída denominado overflow, com um alongamento axial
para dentro do equipamento (vortex finder). O vortex finder é o tubo de saída estendido,
e serve para minimizar o by-pass de ar da alimentação para o overflow. Na parte inferior
há um orifício de saída denominado underflow.
A mistura é injetada tangencialmente no hidrociclone através do tubo de alimentação e,
ao entrar no hidrociclone, inicia um movimento circular descendente, seguindo a
tendência de saída pelo underflow. Como a abertura do underflow é relativamente
pequena, somente parte do líquido consegue escapar. O líquido que não consegue sair
por este caminho volta, formando um vórtice interno, e finalmente escapa pelo
overflow. No caso do presente trabalho, bem como na separação água / óleo, onde a
partícula dispersa é menos densa, a corrente mais concentrada em esferas ocas sai pelo
overflow, e a corrente mais diluída pelo underflow (ver Figura 2.22).
Fig. 2.22 – Hidrociclone para Separação de Eferas Ocas de Lama de Perfuração
41
Um núcleo central gasoso, air core, geralmente se encontra presente em equipamentos
cuja descarga se dá à pressão atmosférica.
Os hidrociclones são equipamentos versáteis, pois podem ser utilizados como
separadores, tanto para suspensões diluídas quanto concentradas, e as partículas
dispersas podem ser sólidas, líquidas ou bolhas de gás. Eles também são usados como
clarificadores, concentradores e equipamento de lavagem, podendo ainda funcionar
como desgaseificadores e classificadores (Heiskanen, 1993).
Outras vantagens na sua utilização são a sua simplicidade de construção (Svarovsky,
1990; Heiskanen, 1993), o baixo custo de instalação e operação, a versatilidade de
aplicação, e seu pequeno tamanho quando comparados a outros equipamentos de
separação (Svarovsky, 1990).
Algumas desvantagens desse equipamento são a sua relativa inflexibilidade, uma vez já
instalados, pois são inflexíveis à instabilidade na vazão e na concentração dos sólidos
alimentados. Hidrociclones são suscetíveis a abrasão, além de gerarem altas taxas de
cisalhamento, o que faz com que este não seja um equipamento adequado para
utilização de floculação, pois os flocos são quebrados no seu interior (Svarovsky, 1990).
Sua alta eficiência de separação e alta capacidade de processamento, aliadas ao pequeno
espaço (floor space) requerido, o torna ideal para operações onde o espaço é crítico,
como ocorre em plataformas de perfuração. Portanto, o uso deste tipo de equipamento
parece ser, a princípio, bastante adequado à separação desejada.
2.3.1
Separação Sólido-Líquido
Apesar de não possuírem partes móveis, como ocorre em centrífugas, os hidrociclones
têm o mesmo princípio (sedimentação em campo centrífugo) e não têm partes móveis,
pois o movimento em vórtice é feito pelo fluido (Medronho, 2000) alimentado. A força
centrífuga desenvolvida no interior do equipamento tende a mover as partículas mais
densas radialmente, em direção à parede, e as que conseguem atingir a parede vão
42
deslizando pela seção cônica até serem coletadas no underflow (McCabe, 1985).
Partículas com densidade menor que a densidade da fase contínua movem-se
radialmente, em direção ao eixo central, deixando o hidrociclone pelo tubo de overflow.
2.3.1.1 Eficiência de Separação
As previsões de performance de um hidrociclone são baseadas na lei de Stokes para o
cálculo da velocidade terminal e essa separação só ocorre se há uma diferença de
densidade entre o fluido e as partículas.
A fração mássica de esfera oca recuperada no overflow será dada por (Svarovsky,
1990):
E t = wso
ws
(2.6)
Onde, Et é a eficiência total, Wso é a vazão mássica de sólidos no overflow e, Ws é a
vazão mássica de sólidos alimentados.
A fração de fluido recuperada no overflow, ou razão de fluido (Rf), é dada por:
w fo
Rf =
Rf =
wf
Q o (1 − C vo )
Q (1 − C v )
(2.7)
(2.8)
Observa-se que Rf é o fator divisor do fluido, que deve ser descontado da eficiência total
para que se chegue à eficiência real de separação, a eficiência total reduzida ou
eficiência centrífuga. Wfo é a vazão mássica do fluido no overflow e, Wf é a vazão
mássica do fluido alimentado. A equação (2.9) fornece a eficiência total reduzida
(Svarovsky, 1990):
43
E 't =
Et − R f
1− Rf
(2.9)
A eficiência granulométrica, G, é a eficiência calculada para um dado tamanho de
partícula, enquanto que a eficiência total, Et, é a eficiência global para uma dada
distribuição de tamanhos de partículas. A eficiência granulométrica reduzida é a
eficiência granulométrica corrigida para a razão de fluido.
Podemos utilizar as mesmas equações que calculam a eficiência total para o cálculo da
eficiência granulométrica, assim obtemos (Svarovsky, 1990):
G=
wso d
ws d
(2.10)
E,
G' =
G − Rf
(2.11)
1− Rf
A distribuição de tamanho das partículas pode ser representada pela equação (2.12) de
Rosin-Rammler (Rosin e Rammer, 1933) e a eficiência granulométrica reduzida por
uma equação de Rosin-Rammler-Bennett Modificada (equação 2.13):
⎡ ⎛ d ⎞m ⎤
y = 1 − exp ⎢− ⎜ ⎟ ⎥
⎢⎣ ⎝ k ⎠ ⎥⎦
⎡
⎛ d
G ' = 1 − exp ⎢− 0.693 ⋅ ⎜⎜
⎢
⎝ d ' 50
⎣
(2.12)
⎞
⎟⎟
⎠
n
⎤
⎥
⎥
⎦
(2.13)
y é a distribuição cumulativa menor que dado tamanho de partícula.
44
O expoente n, da equação acima, é dois para uma separação onde as partículas em
dispersão são menos densas (Leahy-Dios e Medronho, 2003), e três para partículas mais
densas que o fluido (Coelho e Medronho, 2001).
As equações (2.14) e (2.15) fornecem a eficiência total ou eficiência total reduzida,
respectivamente (Svarovsky, 1990):
1
E t = ∫ G ⋅ dy
(2.14)
0
1
E 't = ∫ G '⋅dy
(2.15)
0
2.3.1.2 Performance de Hidrociclones
A força centrífuga, que é a responsável diretamente pela deposição das partículas, é
inversamente proporcional ao raio e proporcional ao quadrado da velocidade tangencial,
segundo a equação:
Fc =
m u 2tan
r
(2.16)
Onde utan é a velocidade tangencial, m é a massa da partícula e r é o raio.
Isto mostra que, ao se diminuir o raio, aumenta-se a força centrífuga, ou seja, aumenta a
eficiência de separação, pois maior número de partículas irão para a parede. Logo,
hidrociclones são geralmente equipamentos de pequeno diâmetro. No caso em estudo o
tamanho do hidrociclone foi limitado pelo tamanho das partículas a serem separadas.
Um aumento na vazão de alimentação pode melhorar a eficiência de coleta, mesmo com
um pequeno aumento no diâmetro do hidrociclone, pois o aumento na área
contrabalança o decréscimo da força centrífuga (McCabe, 1985). Também pode-se
45
confirmar a veracidade dessa afirmação através da equação (2.16), pois a força
centrífuga aumenta com o quadrado da velocidade tangencial, portanto, a eficiência
sofrerá um aumento com o acréscimo na vazão.
A concentração das partículas na alimentação também é uma variável extremamente
importante, e que influencia a eficiência de separação e o gradiente de pressão para um
dado hidrociclone. Com o aumento da concentração, a eficiência de separação diminui
apreciavelmente, isto é o diâmetro de corte aumenta e, conseqüentemente, a razão de
fluido Rf, deve ser aumentada, o que afeta diretamente a eficiência de separação. Com o
aumento da concentração, também há um considerável aumento na queda de pressão
dentro do equipamento.
As dimensões de um equipamento também são projetadas para obter a maior eficiência
possível. Os hidrociclones são equipamentos cuja eficiência de separação é função de
sua geometria e tamanho, no que pode resultar em uma combinação única, com
dimensões nunca antes testadas; devido a isso há modelos para avaliar sua performance
sem que este hidrociclone precise ser construído, ou até para avaliação da performance
de um equipamento em operação.
a) Equações com grupos adimensionais
No dimensionamento de um hidrociclone utiliza-se uma série de equações baseadas em
teorias disponíveis e em relações na forma adimensional, com constantes empíricas
obtidas de dados experimentais.
Os grupos adimensionais utilizados no dimensionamento e otimização de um
hidrociclone são (Svarovsky, 1984; Castilho e Medronho, 2000): Stk50 (número de
Stokes), Eu (número de Euler) e Re (número de Reynolds). Suas equações estão
descritas abaixo:
d ∆pν
= 50
2
Stk 50
18µDc
(2.17)
46
Onde a velocidade, ν =
4
π
2
, é calculada na seção reta do corpo cilíndrico do
Dc
hidrociclone.
Eu =
π 2 ∆P Dc4
8 ρQ 2
(2.18)
O produto entre estes dois grupos adimensionais gera a equação (2.19):
π (ρ s − ρ )∆PDc (d ' 50 )2
Stk 50 Eu =
36 µρQ
(2.19)
E, finalmente, o conhecido número de Reynolds:
Re =
4 ρQ
πµDc
(2.20)
As equações (2.17), (2.18) e (2.20) podem ser utilizadas em quaisquer sistemas de
unidades coerentes como, por exemplo, o Sistema Internacional de Unidades (SI)
(Medronho, 2000).
b) Equações de projeto e de previsão de performance
As proporções geométricas estabelecidas para um hidrociclone do tipo Bradley são
baseadas no diâmetro da porção cilíndrica do mesmo, as equações para o cálculo das
dimensões do equipamento estão abaixo (Bradley, 1965):
Tabela 2.2 – Proporções Geométricas para hidrociclone do tipo Bradley
Hidrociclone
Di/Dc
Do/Dc
L/Dc
Ll/Dc
l/Dc
θ
Bradley
1/7
1/5
-
1/2
1/3
9º
Sabemos que para a geometria do tipo Bradley o melhor ângulo para a seção cônica é o
ângulo do Bradley típico, ou seja, de 9º de acordo com Leahy-Dios e Medronho, 2003.
47
Um aumento no comprimento do vortex finder, de símbolo l , aumenta a eficiência de
remoção das maiores partículas, porém, diminui a eficiência de remoção dos finos
(Svarovsky, 1990).
Entretanto, o comprimento da porção cônica do hidrociclone depende do diâmetro e do
ângulo do underflow, segundo a equação:
L=
Dc
2
+ ⎛⎜
⎝
Dc
2
−
Du
( )
⎞ ⋅ tan θ
2 ⎟⎠
2
(2.21)
Um pequeno diâmetro de saída, por onde as partículas serão separadas, implica em uma
alta concentração dos sólidos recuperados. Entretanto, quanto menor for este diâmetro
menor será a eficiência. O dilema consiste na melhor proporção entre pequenos
diâmetros na saída, e altas taxas de recuperação de sólidos, que não podem ser atingidos
ao mesmo tempo e um deve ser sacrificado em detrimento do outro (Svarovsky, 1990).
O diâmetro do overflow também deve ser dimensionado de acordo com o tamanho das
partículas, e não deve ser menor que oito vezes o tamanho da maior partícula a ser
separada, sob pena de ocorrer entupimento.
Medronho (1984) mostrou através de seus trabalhos experimentais que o produto
Stk50Eu é uma função da razão de fluido (Rf) e da concentração volumétrica (Cv).
n1
⎡ ⎛
⎞⎤
Stk 50 Eu = k1 ⎢ln⎜ 1 ⎟⎥ exp(n 2 C v )
R
f ⎠⎦
⎣ ⎝
(2.22)
Eu = k 2 Re n3 exp(n 4 C v )
(2.23)
⎛D
R f = k 3 ⎜⎜ u
⎝ Dc
n5
⎞
⎟⎟ Eu n6
⎠
(2.24)
48
A Tabela 2.3 dá os valores para os parâmetros das equações (2.22), (2.23) e (2.24),
respectivamente, de acordo com Medronho (1984) e Medronho e Antunes (1992):
Tabela 2.3 – Coeficientes para as equações de
Medronho (1984) e Medronho e Antunes (1992)
Hidrociclone
k1
n1
n2
k2
n3
n4
k3
n5
n6
Bradley
0,0550
0,66
12,0
258,0
0,37
0,0
1,21 E+06
2,63
-1,12
As equações (2.22), (2.23) e (2.24) podem ser usadas em qualquer sistema de unidades
coerente.
Dessas equações, especificando-se o tipo de hidrociclone e o diâmetro de corte
desejado, a densidade do fluido, sua viscosidade, além da vazão de alimentação, pode-se
encontrar o diâmetro da seção cilíndrica do hidrociclone e o número de hidrociclones
necessários para se atingir determinada queda de pressão.
2.3.2
Perfil de Velocidade em Hidrociclones
A velocidade no interior do hidrociclone pode ser decomposta em três componentes:
radial, tangencial e axial.
Podemos descrever as velocidades conforme abaixo:
49
a) Velocidade Tangencial – próximo à parede, ela aumenta, inicialmente, com o
decréscimo do raio, numa relação dada pela equação (2.25), onde cte significa
constante. A Velocidade tangencial então passa por um máximo, decrescendo na
direção do núcleo central de gás. O perfil de velocidade tangencial é
razoavelmente independente da posição vertical, mas sofre os efeitos do air
core, parede e do vortex finder (Svarovsky, 1990).
vr
n
= cte
(0.6 ≤ n ≤ 0.9)
(2.25)
Fig. 2.23 – Perfil de Velocidade Tangencial no hidrociclone
b) Velocidade Axial – Há uma região bem definida com velocidade axial nula
(locus of zero vertical velocity - LZVV), que se situa ao longo do perfil do
hidrociclone (Svarovsky, 1990). Tanto na porção cônica quanto na cilíndrica
tem-se um fluxo descendente próximo à parede. Já na região central o fluxo é
ascendente. Ao redor do vortex finder um fluxo descendente pode ser observado
(by-pass).
50
Fig. 2.24 – Perfil de Velocidade Axial no hidrociclone
c) Velocidade Radial – seus componentes são muito menores que os dois outros
acima e, por isso, é muito mais difícil de medí-la.
A velocidade radial é
decrescente com o decréscimo do raio, e acima da borda do vortex finder e
próximo ao topo do hidrociclone há fortes velocidades radiais em direção ao
centro e à base do vortex finder, causando um by-pass (Svarovky, 1981).
Fig. 2.25 – Perfil de Velocidade Radial no hidrociclone
51
Os perfis de velocidade num hidrociclone são muito complexos, mesmo para a água que
possui baixa densidade e viscosidade, e pode ser incorreto assumir perfis precisamente
similares aos descritos acima para hidrociclones com geometrias consideravelmente
diferentes ou com líquidos de alta viscosidade (Svarovsky, 1990).
52
CAPÍTULO III
3. TURBULÊNCIA
3.1 Introdução à Turbulência
Grande parte dos escoamentos encontrados na natureza e em aplicações práticas é
turbulento.
Os escoamentos turbulentos são instáveis e contém flutuações que são dependentes do
tempo e da posição no espaço (Neto et al., 2002). Disso advém a dificuldade de se
descrever os violentos movimentos de flutuação, como, por exemplo, se prever o local
onde se formará um turbilhão ou vórtice turbulento (turbulent eddy) e o campo de
velocidades com precisão, dentre outras dificuldades.
A turbulência é um fenômeno que envolve, principalmente, transferências convectivas
de momento, massa e energia. Ela gera, portanto, escoamentos necessariamente
tridimensionais (Neto et al., 2002).
A turbulência é um fenômeno altamente dissipativo, pois parte da energia cinética é
transformada em aquecimento devido às tensões de cisalhamento que são intensificadas
no regime turbulento. Quanto maiores as flutuações de velocidades, maiores os
gradientes e o cisalhamento local, e, em conseqüência, maior o efeito de dissipação
viscosa (Neto et al., 2002).
3.1.1
Escoamentos Turbulentos
O Perfil de Turbulento de Velocidades é mais a achatado que o laminar (Fig. 3.1). Este
é um perfil mais homogêneo devido às fortes transferências convectivas intrínsecas ao
regime. A transição do regime laminar para o turbulento, especificamente em tubos
cilíndricos, por exemplo, ocorre em um número de Reynolds crítico, maior que 2.100.
53
Fig. 3.1 Comparação entre os perfis de velocidade no interior de uma canalização para uma mesma vazão: i)
escoamento laminar; ii) escoamento turbulento; adaptado de Tritton (1988)
As equações de transporte podem ser usadas para o regime turbulento tomando-se, por
simplicidade, sua média temporal, sendo chamadas, então, de equações suavizadas no
tempo ou time-smoothed equations, assim, poderão ser utilizadas para se obter os perfis
de velocidade e pressão.
Uma questão importante para se obter um resultado numérico acurado em fluxos
turbulentos industriais é a formulação e o tratamento numérico das equações de
transporte próximas às paredes sólidas.
3.2 Modelagem Matemática
Para escalas de tempo maiores que a escala das flutuações turbulentas, a turbulência
exibe propriedades médias. O conceito de tensão de Reynolds, introduzido por Osborne
Reynolds (1895), usa a idéia de escoamento médio como ponto de partida para a
resolução da maioria dos problemas de escoamento industriais. Essa idéia consiste em
expressar qualquer propriedade do escoamento através de uma quantidade média e outra
de flutuação turbulenta. Isto é, todas as variáveis podem ser escritas como a soma de sua
média e sua flutuação:
Φ = Φ + Φ'
(3.1)
54
Onde Φ é o valor da variável em um instante t, Φ é a sua média temporal e Φ ’ é a
flutuação turbulenta naquele instante t. Podemos, então, decompor a velocidade de
acordo com Reynolds:
U z =U z + uz
(3.2)
Onde U z é o valor médio das velocidades calculado sobre um grande número de
flutuações. Essas flutuações devem ser obtidas num período de tempo pequeno o
suficiente para captar as mudanças na função, mas grande o suficiente para se pegar os
períodos das flutuações, daí então poderá se obter a função média suavizada. No nosso
caso temos a velocidade suavizada no tempo.
Uz =
1 t +1 / 2t0
U z (s ) ds
∫
t 0 t −1 / 2t0
(3.3)
De acordo com a definição acima obtemos:
uz = 0 ; uz = 0 ; U zu z = 0 ; uzuz ≠ 0
(3.4)
A equação do movimento de Navier-Stokes é escrita como:
∂
ρU = −[∇ • ρU ⊗ U ] − ∇p − [∇ • τ ] + ρg
∂t
(3.5)
Onde em negrito temos os vetores, ex: U e g. A função τ é um tensor de 2ª ordem.
A média temporal, independente do tempo, da equação da continuidade ou conservação
de Navier-Stokes ficará como (Bird, 2002):
∂ρ
+ ∇ • ρ ⋅U = 0
∂t
(3.6)
55
Sendo que, para fluidos incompressíveis:
∇ •U = 0 e ∇• u = 0
(3.7)
Desconsiderando as flutuações sobre a massa específica e viscosidade, de forma que
seus efeitos sobre a turbulência possam ser desprezados, e aplicando-se a média
temporal na equação do momento (3.5), e as equações (3.4) e (3.7), a equação de
Navier-Stokes de conservação de momento ficará então, segundo Bird (2002):
[
]
V
T
∂
ρ U = − ∇ • ρ U ⊗ U − ∇ p − ⎡⎢∇ • ⎛⎜ τ + τ
⎝
∂t
⎣
⎞⎟⎤ + ρg
⎠⎥⎦
(3.8)
Simplificando a expressão acima teremos:
∇•τ
V
(
= −∇ • µ∇U
)
(3.9)
Se µ for constante poderemos simplificar o operador ∇ • ∇ = ∇ 2 (operador Laplaciano)
para:
∇•τ
V
= − µ∇ 2 U
(3.10)
T
∇ • τ = −∇ • ρ u ⊗ u
(3.11)
Logo, substituindo as equações (3.9) e (3.10) na equação (3.8), teremos a equação do
movimento para fluido incompressível de viscosidade constante:
[
]
∂
ρ U = − ∇ • ρ U ⊗ U − ∇ p + µ ∇ 2 U + ∇ • ρ u ⊗ u + ρg
∂t
(3.12)
56
V
T
Onde τ é o tensor relacionado ao fluxo do momento viscoso e τ é o tensor do fluxo
de momento turbulento, também chamado de Reynolds stresses ou Tensores de
Reynolds. A única diferença entre a equação do movimento instantânea, equação (3.5),
e a média temporal da equação do movimento, equação (3.8), é o termo que envolve o
divergente do tensor turbulento. Este divergente mostrado na equação (3.11) é
conhecido como força turbulenta e representa a força de inércia extra, causada pela
aceleração convectiva das velocidades flutuantes.
3.3 Modelos de Turbulência
Atualmente, apesar da aplicabilidade industrial das equações instantâneas de NavierStokes, não se pode resolvê-las pela aplicação de simulações numéricas diretas (DNS –
Direct Numerical Simulation) (Deschamps, 2002). Somente situações relativamente
simples de escoamento turbulentos foram resolvidas, até o momento, através de DNS.
Isso se deve a característica tridimensional e transiente do escoamento turbulento, com a
presença de vórtices, e com escalas de comprimento e tempo que requerem níveis de
discretização espacial e temporal extremamente pequenos para suas corretas
caracterizações (Deschamps, 2002).
Os escoamentos turbulentos são escoamentos com graus de liberdade (Ngl) muito
grandes, pois quanto maior o número de Reynolds maior será o grau de liberdade (Neto,
2002). Sabendo-se que, a análise teórica de um problema passa pela solução de sistemas
compostos por um número de equações igual ao Ngl, vê-se que a solução teórica ou
numérica da maioria dos problemas de turbulência está fora das possibilidades atuais.
Num escoamento com Re = 4.000, o Ngl é igual a 1,3x108, calculado pela equação
abaixo:
Ngl = Re9L / 4
(3.13)
Com a proposição da média temporal das equações governantes é possível o uso de
malhas bem menos refinadas e o emprego de hipóteses simplificadoras para essas
equações, como, por exemplo, escoamento bidimensional, regime permanente, etc.
57
Como conseqüência, obtém-se uma redução drástica dos recursos computacionais
demandados.
O único termo que permanece na média temporal das equações governante é o termo do
tensor de Reynolds τ T = u ⊗ u e seu divergente é dado pela equação (3.11).
Pode-se utilizar duas abordagens para se resolver os problemas da modelagem da
turbulência:
-
Modelagem estatística clássica (simulação numérica do comportamento médio
dos escoamentos turbulentos);
-
Modelagem da sub-malha (simulação numérica de grandes escalas, onde as
grandes estruturas são resolvidas explicitamente e as menores são modeladas).
Dentro da modelagem estatística clássica, para se descrever os tensores de Reynolds
dois tipos de modelos são os mais utilizados:
-
Modelos baseados na viscosidade turbulenta;
-
Modelos dos Tensores de Reynolds.
Dentro da modelagem de sub-malha resolvem-se numericamente as Médias de
Reynolds das equações de Navier-Stokes (RANS – Reynolds Averaged Navier-Stokes)
através do seguinte modelo:
-
A Simulação dos Grandes Vórtices ou de Grandes Escalas (Large Eddy
Simulation);
O problema de fechamento das equações (Closure problems) consiste em se ter uma
quantidade de equações suficientes para resolver todas as variáveis desconhecidas. Aos
58
usuários de fluidodinâmica computacional cabe o fornecimento de um método para
determinação dos tensores de Reynolds que descreva adequadamente o maior número
de situações dentro do escoamento desejado. As equações utilizadas para fechar o
sistema definem o tipo de modelo de turbulência.
3.3.1
Modelos de Viscosidade Turbulenta
Admite-se a hipótese originalmente proposta por Boussinesq (1877) de que as tensões
de Reynolds são proporcionais à viscosidade turbulenta, levando a uma relação similar
ao do comportamento do escoamento laminar de fluidos Newtonianos, sendo que a
viscosidade turbulenta não é uma propriedade física do fluido, mas sim uma medida do
nível de turbulência. Para simplificação dos modelos omitimos a média temporal nas
equações a seguir.
No modelo de viscosidade turbulenta o tensor de Reynolds pode ser definido como:
τ T = µ T ∇U T
(3.14)
Colocando-se na forma generalizada proposta por Kolmogorov (1942), o tensor de
Reynolds pode ser avaliado através da seguinte equação:
− ρu ⊗ u = −
(
2
2
ρκδ − µ T ∇ • Uδ + µ T ∇U + (∇U )T
3
3
)
(3.15)
Podemos definir: u é a velocidade das flutuações turbulentas, U é a velocidade média,
τ T é a tensão cisalhante, k = 1 u 2 é a energia cinética turbulenta, µT é a viscosidade
2
turbulenta, e δ é o delta de Kronecker.
Substituindo a definição de tensão turbulenta de Kolmogorov (3.15) na equação (3.8)
obtemos a equação abaixo:
59
{ [
∂
ρU + ∇ • ρ (U ⊗ U ) = B − ∇p '+∇ • µ eff ∇U + (∇U )T
∂t
]}
(3.16)
Onde B é a soma de todas as forças de campo, e a viscosidade efetiva µeff é definida
como:
µ eff = µ + µ T
(3.17)
Como µ é a viscosidade absoluta, µT é a viscosidade turbulenta e p’ é a pressão
modificada, que pode ser definida por:
p' = p +
2
⎛2
⎞
ρκ + ∇ • U ⎜ µ eff − ζ ⎟
3
⎝3
⎠
(3.18)
Onde ζ é a viscosidade bulk.
3.3.1.1 Modelos à equação zero (Zero equation)
O modelo à equação zero para a viscosidade turbulenta calcula o valor global de µt
através de fórmulas empíricas, utilizando a velocidade média do escoamento e a escala
de comprimento geométrico, gerando resultados aproximados, porém com bastante
rapidez (Hirsch, 1989). Porém, é um modelo de predição limitado, pois a escala de
comprimento deve ser especificada empiricamente, segundo Speziale (1996) e
Deschamps (2002).
Neste modelo não há resolução de equação de transporte adicional, o que implica em
simplicidade e rapidez de resolução, porém, não é um modelo que forneça soluções
acuradas, tornando-o adequado para sistemas e geometria muito simples; sendo muito
60
utilizado como condição inicial para resolução de outros modelos de turbulência mais
complexos.
Modelos deste tipo foram propostos independentemente por Prandtl (1945) e
Kolmogorov (1942), para preverem a viscosidade turbulenta como um produto da escala
de velocidade e da escala de comprimento. Com este modelo há somente um valor de
viscosidade turbulenta para todo o domínio do fluido. Abaixo, apresenta-se a equação
do modelo à equação zero do CFX (2003):
µ t = ρ f µ U t lt
(3.19)
Onde, ρ é a viscosidade do fluido, fµ é uma constante de proporcionalidade, Ut é a
escala de velocidade turbulenta, e lt é a escala de comprimento turbulento.
A escala de velocidade turbulenta é considerada como sendo a velocidade máxima do
fluido. A escala de comprimento turbulento, nesse modelo, é dada através da seguinte
expressão:
1
V 3
lt = D
7
(3.20)
Onde VD é o volume total do domínio.
3.1. Modelo à equação zero para a fase dispersa (Dispersed Phase Zero Equation)
O modelo de turbulência utilizado para as partículas é um modelo à equação zero
adaptado à fase dispersa. Neste modelo, o parâmetro σ é o número de Prandtl turbulento
que relaciona a viscosidade cinemática turbulenta da fase dispersa à viscosidade
cinemática turbulenta da fase contínua, segundo a equação abaixo (3.21).
61
σ=
ν td
ν tc
(3.21)
Logo, a viscosidade turbulenta dispersa que entra na equação de Prandtl e Kolmogorov
(3.19) é a equação (3.22) mostrada abaixo:
µ tc =
ρ d µ tc
ρc σ
(3.22)
3.3.1.2 Modelos a duas equações
Nos modelos a duas equações, as escalas de velocidade e do comprimento são
resolvidas usando equações de transporte distintas, donde advém o nome para esses
modelos.
Nesses tipos de modelo, a viscosidade turbulenta é modelada como o produto entre as
escalas de velocidade e de comprimento turbulento. A escala de velocidade turbulenta é
calculada através da equação de transporte para a energia cinética turbulenta; e, a escala
de comprimento turbulenta é estimada de duas propriedades do campo turbulento, como
energia cinética turbulenta e sua taxa de dissipação (CFX, 2003).
Estes são modelos largamente empregados, pois oferecem ao mesmo tempo poder
numéricos e acurácia computacional.
a) Modelo κ-ε
É um dos modelos mais importantes. É um modelo estável e robusto numericamente,
para propósitos genéricos oferece robustez e acurácia ao mesmo tempo.
Porém é um modelo deficiente nas seguintes situações, segundo Deschamps (2002) e
CFX (2003):
62
-
Escoamento na presença de curvatura de linhas de corrente;
-
Escoamento sob ação de gradientes de pressão muito grandes;
-
Escoamentos com regiões de separação;
-
Jatos;
-
Escoamentos sob ação de campos de forças.
O modelo κ−ε gera uma turbulência isotrópica, sendo impróprio para a simulação de
escoamentos circulares mais complexos (com anisotropia), já que superestimam a
tensão turbulenta, prevendo de forma errada as velocidades tangencial e axial.
Neste modelo a viscosidade turbulenta é definida como:
µT = C µ ρ
κ2
ε
(3.23)
Onde Cµ é uma constante, κ é a energia cinética turbulenta e ε é a taxa dissipação da
energia cinética turbulenta.
Abaixo são apresentadas as equações modificadas da continuidade e da conservação de
momento para o modelo κ−ε, respectivamente:
∂ρ
+ ∇ • ( ρU ) = 0
∂t
(3.24)
∂
ρU + ∇ • ρ (U ⊗ U ) − ∇ • (µ eff ∇U ) = B + ∇p"+∇ • (µ eff ∇U )T
∂t
(3.25)
63
Onde µeff é dada pela equação (3.17) e a pressão modificada (p”) é dada pela equação
(3.26):
p" = p +
2
ρκ
3
(3.26)
Os valores de κ, que entrarão na equação da viscosidade turbulenta (3.23) podem ser
calculados pela seguinte equação:
⎞
⎛ µ eff
∂ ( ρκ )
ρε
+ ∇ • ( ρUκ ) = ∇ • ⎜⎜
∇ κ ⎟⎟ + Pk − {
{
σk
∂t
⎠
⎝
III
II
144244
3
(3.27)
I
O termo I representa a transferência de energia cinética por difusão e o termo III
representa a dissipação de energia cinética por cisalhamento. O termo II, variável Pk, é a
produção de turbulência devido às forças viscosas (cisalhamento) e de empuxo, que é
modelada segundo a equação (3.28).
(
)
Pk = µ T ∇U • ∇U + ∇U T −
2
∇ • U (3µ T ∇ • U + ρκ ) + Pkb
3
(3.28)
Os valores de ε são encontrados na equação diferencial de transporte abaixo:
⎛ µ eff
⎞ ε
∂ (ρε )
+ ∇ • (ρUε ) = ∇ • ⎜⎜
∇ε ⎟⎟ + (C ε 1 Pκ − C ε 2 ρε )
∂t
⎝ σε
⎠ κ
(3.29)
Os valores das constantes Cε1, Cε2, σκ e σε estão na tabela abaixo:
Tabela 3.1 – Valores das constantes da equação da taxa de dissipação turbulenta
Variáveis
Cε1
Cε2
σκ
σε
Faixa de valores
1,44- 1,55
1,92-2,00
1,0
1,3
64
b) Modelo RNG κ−ε
Este modelo é uma variante do modelo κ−ε, recentemente proposta por Orszag et al.
(1993), e foi derivada a partir da Teoria da Renormalização de Grupo. Segundo
Deschamps (2002), as constantes e funções que aparecem no modelo são obtidas
teoricamente, e não empiricamente, como no κ−ε tradicional. Além disso, esse modelo
pode ser aplicado à subcamada limite viscosa sem a necessidade de inclusão de
correções nas constantes ou funções nas equações de transporte.
Orszag et al. (1993) defendem que o modelo RNG κ−ε fornece um espectro maior de
aplicação, e, segundo Deschamps (2002), este modelo daria previsões mais precisas do
que o modelo κ−ε tradicional, em situações de escoamento incluindo separação, linhas
de corrente curvas e regiões de estagnação.
A única diferença entre a equação (3.27) e a (3.30) e a equação (3.29) e (3.31),
respectivamente utilizadas para o cálculo de κ (3.28) e de ε (3.29), são os valores das
suas constantes:
⎛ µ eff
⎞
∂ ( ρκ )
+ ∇ • (ρUκ ) = ∇ • ⎜⎜
∇κ ⎟⎟ + Pk − ρε
∂t
⎝ σ κRNG
⎠
(3.30)
⎞ ε
⎛ µ eff
∂(ρε )
+ ∇ • ( ρUε ) = ∇ • ⎜⎜
∇ε ⎟⎟ + (Cε 1RNG Pk − Cε 2 RNG ρε )
∂t
⎠ κ
⎝ σ εRNG
(3.31)
O coeficiente Cε1RNG do modelo RNG κ−ε, é explicitado abaixo na equação (3.32). Este
coeficiente é dependente de dois outros, fη e η, que também são dados a seguir:
C ε 1RNG = 1,42 − f η
(3.32)
65
⎛
η ⎜1 −
η ⎞
⎟
⎝ 4,38 ⎠
fη =
1 + β RNGη 3
(
)
(3.32.a)
Pκ
ρC µRNG ε
η=
(3.32.b)
Cε2RNG, CµRNG, βRNG, σκRNG e σεRNG são constantes do modelo, com valores fixados na
tabela abaixo:
Tabela 3.2 – Valores das constantes do modelo RNG κ−ε
Variáveis
Cε2RNG
CµRNG
βRNG
σκRNG
σεRNG
Valores
1,92
0,085
0,012
0,7179
0,7179.
c) Modelo κ-ω
Esse modelo foi formulado para o cálculo de escoamentos de baixos números de
Reynolds, perto da parede, sendo mais apropriado para problemas de aerodinâmica
(escoamento com regiões de separação). O modelo não envolve as funções não-lineares
necessárias para o modelo κ-ε, tornando-se, portanto, mais preciso e robusto.
Como esse tipo de escoamento possui baixo número de Reynolds perto da parede, o
modelo demandaria uma malha (grid) muito refinada. Porém, o tratamento utilizado
pelo κ−ω, próximo a parede, troca automaticamente do modelo de baixo número de
Reynolds para uma função de parede (wall function); é o chamado tratamento
automático próximo à parede (ver item (3.4), onde se explica o tratamento utilizado
pelos modelos de turbulência nas regiões próximas às paredes).
3.3.2
Modelos dos Tensores de Reynolds
Os modelos de tensores de Reynolds (RSM – Reynolds Stress Model), ou de
fechamento de segunda ordem (FSO), são baseados nas equações de transporte para
todos os componentes do tensor tensão de Reynolds e da taxa de dissipação turbulenta,
66
sendo adequados para escoamentos fortemente anisotrópicos (Launder, 1989). Esses
modelos não utilizam a hipótese da viscosidade turbulenta, mas resolvem equações
individuais para o transporte das tensões de Reynolds no fluido.
Os modelos de RSM são apropriados para os seguintes escoamentos, segundo
Deschamps (2002) e CFX (2003):
-
Com efeitos de curvatura;
-
Com mudanças repentinas na taxa de cisalhamento;
-
Escoamentos secundários;
-
Escoamentos com empuxo.
O cálculo exato do termo de produção, e a modelagem inerente ao modelo das tensões
anisotrópicas fazem com que, em tese, os modelos de RSM sejam mais apropriados para
escoamentos complexos.
3.3.3
Simulação de Grandes Vórtices
Nos escoamentos turbulentos, podemos ter uma idéia da ordem de grandeza das
variáveis envolvidas nos fenômenos através das escalas características da turbulência.
Estas escalas estão relacionadas com tempo, comprimento, velocidades, energia, e
vorticidade.
Segundo Neto (2002), dada a escala de comprimento e a de velocidade, pode-se definir
as demais escalas de turbulência, na seguinte ordem: tempo, vorticidade e energia. As
maiores estruturas de um escoamento são determinas pela geometria que lhes dão
origem.
A simulação de grandes vórtices, ou de grandes escalas, iniciou-se com os trabalhos do
meteorologista Smagorinski (1963) e surgiu da necessidade de se simular apenas
67
grandes escalas de escoamentos atmosféricos, na impossibilidade de simular todo o
espectro de escalas.
Segundo Neto (2002), a Simulação de Grandes Escalas é uma metodologia
intermediária à Simulação Direta e à simulação via equações médias de Reynolds. Para
grandes escalas, as equações de transporte são resolvidas diretamente da solução das
equações filtradas; para as escalas menores, usa-se modelagem, pois elas tendem a ser
mais homogêneas e isotrópicas e menos afetadas pelas condições de contorno.
No CFX 5.6 está disponível o modelo LES (Large Eddy Simulation) para simulações de
grandes escalas. Esse modelo deve ser aplicado em altos números de Reynolds
(Re>5000) para as seguintes condições:
-
O escoamento tende a ser instável, com grandes oscilações sobre superfícies
cisalhantes ou descolamento dos vórtices;
-
O fluxo tende a ser não-estacionário com estruturas coerentes;
-
O empuxo é importante no escoamento, com grandes regiões de instabilidade
criadas pelo aquecimento, ou por fluidos de baixo peso específico abaixo de
fluidos mais pesados (em dutos inclinados no escoamento multifásico);
-
Quando é requerida uma boa representação das pequenas escalas, como em
processos com reação ou micro-mistura;
-
Quando são necessárias informações das flutuações.
O LES não é recomendado em escoamentos confinados.
3.3.4
Simulação Numérica Direta
A DNS resolve as equações de Navier-Stokes para todos os parâmetros do movimento
do escoamento turbulento.
68
A abordagem mais exata para a simulação de turbulência é a resolução das equações de
Navier-Stokes, sem que sejam utilizados a média dos parâmetros ou qualquer outro tipo
de aproximação, com exceção das aproximações inerentes aos métodos numéricos de
discretização, cujos erros podem ser estimados e controlados. Do ponto de vista
conceitual, esse tipo de abordagem é a mais simples, porém a mais difícil de ser
implementada na prática, por requerer grande capacidade de processamento e memória
computacional.
3.4 Perfil de Velocidade Turbulenta Próxima a Parede
Perto de uma parede, num escoamento turbulento, podem-se distinguir quatro regiões
ou camadas de fluxo:
1. Subcamada laminar é a camada mais próxima à parede, onde a
viscosidade do fluido tem um papel fundamental.
2. Camada tampão, na qual ocorre a transição entre a região inercial e a
subcamada laminar.
3. Camada ou região inercial é o começo da corrente principal de
turbulência, na qual a viscosidade já não tem um papel muito importante.
4. Região plenamente turbulenta, na qual a distribuição de velocidade é
praticamente plana (velocidade é a mesma na camada) e onde a
viscosidade se torna irrelevante.
Fig. 3.2 Camadas de um escoamento turbulento
69
As camadas 2 e 3 também podem ser agrupadas numa única, chamando-se Região
Logarítmica.
Perto de uma parede no-slip (com condição de não-deslizamento, velocidade na parede
= 0), há fortes gradientes nas variáveis dependentes, e os efeitos viscosos atuam
fortemente nos processos de transporte. A representação dos processos dentro de uma
simulação numérica encara os seguintes problemas: a) como avaliar os efeitos viscosos
perto da parede; b) como resolver as grandes variações das variáveis do fluxo que
ocorrem dentro de uma região / camada de contorno.
Duas aproximações são usualmente utilizadas para modelar o fluxo turbulento perto da
região da parede:
-
Utilizar funções de parede (wall functions: modelos que mostram a distribuição
da média temporal das velocidades na vizinhança de uma parede); Exemplo: Lei
da Potência (Power Law), logarítmica, desenvolvimento em séries de Taylor, e
no CFX 5.6 funções de parede scalable, standard e automatic;
-
O método do Baixo Número de Reynolds (Low Reynolds number method).
As funções de parede são uma coleção de equações semi-empíricas e funções que fazem
uma ligação entre as condições na parede, provendo condições de contorno perto da
parede nas subcamadas afetadas pela viscosidade (ex: tensor tensão na parede), e as
variáveis dependentes na região do fluxo turbulento principal. Essas equações são
acionadas a partir do primeiro nó (node) próximo à parede.
O inconveniente de uma aproximação por uma função de parede para simulação
numérica é que as predições dependem de saber localizar o ponto mais próximo à
parede onde começa a camada turbulenta e a influência da sensibilidade da malha na
função de parede.
70
No CFX 5.6 devemos aplicar as funções de parede escalonáveis (Scalable Wall
Functions) para todos os modelos de turbulência baseados nas ε -equações. Esse
método escalonável aplica automaticamente as funções de parede, sem a preocupação
com refinamento demasiado dessa malha ou com localização de regiões aplicáveis.
A função y + mede a distância, adimensional, da parede. Bem próximo a parede, o
perfil de velocidade passa de logarítmico a linear, sendo que o perfil logarítmico está
entre 5 ≤ y + ≤ 10 , o viscoso até y + = 5 , e o turbulento a partir de y + = 11 .
O CFX 5.6 também disponibiliza um método chamado Standard Wall Functions, onde,
ao contrário do método escalonável, devemos saber a localização da região em que
começa a camada turbulenta. A malha próxima à parede deve estar com o refinamento
adequado, tal que o y+ (Yplus) não esteja abaixo de 11. Para números de y+ menores que
este valor resolvem-se as equações de turbulência utilizando-se as funções de parede
(para modelos ε).
Para os modelos k − ω aplica-se um tratamento automático perto da parede. Este é um
modelo que muda automaticamente das funções de parede para a aproximação de baixo
N° de Reynolds, à medida que a malha é refinada. A idéia principal é se obter uma
formulação que combine o valor de parede para ω entre o perfil logarítmico e a
formulação perto da parede.
A aproximação do baixo número de Reynolds requer uma malha muito refinada na zona
próxima à parede; neste método não se usam funções de aproximação, como as funções
de parede, mas sim, consiste em estender o uso das equações empíricas com que se
resolve o escoamento turbulento para as subcamadas que sofrem efeito da viscosidade,
que são as camadas próximas às paredes.
71
CAPÍTULO IV
4. FLUIDODINÂMICA COMPUTACIONAL (CFD)
O objetivo da dinâmica dos fluidos computacional é ajudar a entender os eventos físicos
que ocorrem num escoamento de fluidos, num determinado volume de controle, através
da simulação computacional dos fenômenos que os envolve. A simulação em CFD é
feita pela discretização de equações diferenciais parciais das equações de transporte
(momento, massa e energia) que descrevem o escoamento. (Fortuna, 2000; Lomax,
2001).
A dinâmica dos fluidos computacional – CFD, pode ser utilizada para o cálculo dos
mais diversos fenômenos: dissipação, difusão, convecção, ondas, superfícies livres,
camadas de contorno e turbulência. Esses fenômenos estão associados aos mais diversos
tipos de escoamentos, tanto externos (na aerodinâmica de naves espaciais, aviões e
automóveis, hidrodinâmica de navios, hidrologia e oceanografia, fluxos nos rios, mares
e oceanos, engenharia ambiental, etc.), quanto internos (sistemas reacionais, combustão
e turbinas a gás, transferência de calor e massa em equipamentos, transporte em dutos e
engenharia biomédica, etc.) (Versteeg e Malalasekera, 1995).
Basicamente, o usuário de CFD está interessado em obter as distribuições de
velocidade, pressões e temperaturas na região do escoamento. Ao usuário também são
disponibilizadas ferramentas para cálculo de determinadas variáveis de interesse, por
exemplo, no caso da simulação de hidrociclones e outros equipamentos de separação,
avaliar as eficiências de separação; e, no caso de misturas reacionais, a conversão da
reação e a quantidade de produto formado.
CFD é muito utilizado para simular escoamentos turbulentos, porém, a maior parte das
soluções para esse tipo de escoamento contém modelos de turbulência que são apenas
aproximações das características físicas reais do mesmo, e /ou que dependem de dados
empíricos para a obtenção de diversas constantes agregadas nesses modelos. Daí surgem
erros, pois além dos modelos muitas vezes não serem adequados (em todo ou em parte)
72
ao caso estudado, a solução numérica para cada equação também introduz erros aos
resultados finais, pois são sempre aproximadas. Portanto, as diferenças entre os
resultados computados e os dados reais contêm erros devido a: hipóteses feitas nas
equações diferenciais originais, aproximações inerentes ao processo de discretização, ou
a erros gerados pelos métodos iterativos utilizados na geração da solução numérica.
Os erros gerados na solução numérica podem levar a pouca representatividade, ou a
nenhuma, da solução, quando comparada com a realidade física. Logo, a ferramenta
numérica é adequada e confiável quando se está de posse de um método numérico que
resolva corretamente as equações diferenciais, e de um modelo matemático que
represente com fidelidade o fenômeno físico. Vale ressaltar que a correta visualização e
interpretação das soluções geradas é tão importante quanto à solução em si.
A comparação dos resultados numéricos (RN) com os resultados analíticos (RA) das
equações diferenciais, se existirem, ou com outros numéricos, caracteriza a validação
numérica. Por outro lado, a comparação dos resultados numéricos (RN) com os
resultados experimentais (RE) identifica a validação física.
4.1 Etapas para a Solução Numérica
A aplicação de CFD a problemas físicos, e sua resolução pela aplicação de modelos
matemáticos num domínio limitado, segue os seguintes passos ou etapas, visualizadas
na figura (4.1) abaixo:
73
1. Problema
Físico
2. Modelagem
Matemática
5. Condições de
Contorno
6. Resolução das
Equações
Equações
Governantes
3. Discretização
Sistema de
Equações Algébricas
4. Geração da
Malha
Solução
Aproximada
7. Análise e
Interpretação
Figura 4.1: Etapas da resolução de problemas em CFD
O primeiro passo para aplicação de CFD é a modelagem do problema físico,
determinando as grandezas que atuam sobre o sistema e como o afetam, além da
determinação dos limites de estudo do problema físico. O problema físico será
modelado matematicamente (segundo passo), sendo expresso na forma das leis de
conservação de momento, massa e energia. Esses modelos irão explicar o sistema
estudado, além de prever seu comportamento em diferentes situações.
Após a modelagem matemática devemos definir a região de aplicação e validade das
equações, essa região é chamada de domínio. O terceiro passo é a discretização do
domínio, ou seja, sua divisão em pontos de aplicação das equações, para obtenção das
soluções numéricas. A distribuição adequada dos pontos no domínio é fundamental para
se obter uma solução numérica representativa do escoamento. As soluções numéricas
não podem ser obtidas sobre uma região contínua, mas sim dentro de sub-regiões dentro
do domínio, que são denominados elementos. Portanto, o quarto passo consiste na
geração da malha, que é o conjunto de elementos que compõem o domínio.
Após a geração da malha, devemos introduzir as condições de contorno necessárias para
resolução das equações (quinto passo). Essas condições de contorno, condições iniciais,
74
ao lado das propriedades físicas do fluido e dos parâmetros do escoamento especificam
o problema a ser tratado.
Obtém-se, então, um sistema com equações algébricas, geralmente lineares, que podem
ou não estar acopladas. Finalmente, no sexto passo, essas equações são resolvidas,
fornecendo a solução numérica para o problema analisado. A solução obtida deve ser,
por conseguinte, analisada e interpretada (sétimo passo). Eventualmente, se for
necessário, o modelo deve ser ajustado para que se tenha um resultado confiável, de
modo que se possa extrair as variáveis de interesse e visualizar a solução do problema.
No item 4.1.1 estão descritas as características que atestam a confiabilidade da solução
numérica aproximada.
4.2 Solução Numérica Representativa
As características necessárias para que a solução numérica seja representativa, ou seja,
que tenha significado físico e que reproduza a realidade do escoamento, estão listadas
abaixo (Ferziper, 1996) e (Versteeg e Malalasekera, 1995):
-
Consistência: a consistência de uma solução é verificada pela diferença entre a
equação discretizada e a exata, através do erro de truncamento. O erro de
truncamento de um método consistente deve ser zero, quando o limite do tempo
e espaço tender a zero: ( ∆t → 0 e ∆xi → 0 ).
-
Estabilidade: o método de solução numérica é estável se não houver aumento
dos erros ao longo do processo de solução numérica, ou seja, se os resultados
não divergirem.
-
Convergência: é a propriedade de um método numérico de produzir uma solução
que se aproxima a solução exata das equações diferenciais, quando o
espaçamento da malha, o tamanho do volume de controle ou do elemento tender
a zero. Um método pode atingir uma solução convergente, mas a solução pode
75
ser dependente da malha, isto é, se a malha mudar a solução muda. No entanto,
há um tamanho de malha mínimo na qual a solução é independente dela.
-
Conservação: um método iterativo pode chegar a uma solução de três formas:
quando o critério de convergência for o erro quadrático da raiz (RMS) das
equações resolvidas; ou quando atingir um critério de convergência para o
fechamento do balanço das equações simuladas. No estado estacionário, e na
ausência de geração, a quantidade que sai dentro de um volume fechado é igual
à quantidade que entra o mesmo volume, ou seja, baseados nas leis de
conservação o que entra é igual ao que sai. No CFX a conservação pode ser
avaliada pelo resultado dos balanços de momento e massa; que está mostrado no
arquivo de extensão .out, ao término da simulação.
-
Precisão: Existem três tipos de erro nas soluções numéricas de problemas de
escoamento de fluidos. São eles: os erros de modelagem, introduzidos na
solução por meio das suposições feitas nas derivações das equações de
transporte, pela simplificação da geometria, do domínio e das condições de
contorno; erros de discretização, introduzidos na solução por aproximações do
sistema algébrico de equações discretizadas e, portanto, podem ser reduzidos
usando interpolações, ou aplicando aproximações a regiões menores; erros de
convergência, que são calculados pela diferença entre as soluções iterativas e
exatas dos sistemas de equações algébricas.É essencial controlar e estimar erros
de convergência e discretização antes de julgar a validade dos modelos de
fenômenos físicos.
-
Viabilidade da solução: devemos ter modelos projetados especificamente para
resolução de alguns fenômenos muito complexos como, por exemplo, para
turbulência, combustão, e escoamento multifásico, a fim de que os resultados
tenham significado físico, e de que as soluções não divirjam.
76
4.3 Malha
A malha é o conjunto de sub-regiões, ou elementos, em que se divide o domínio
geométrico do problema. As equações são resolvidas gerando variáveis com valores
discretos, em cada elemento, e a solução de um elemento será utilizada como condição
de contorno para o elemento adjacente. Devido a isso, devemos ter uma malha
apropriada, com refinamento em regiões cujos gradientes de variação das variáveis são
mais elevados, para que se possa captar essas variações (como ocorre nas regiões de
parede).
O tipo de malha adequado para o escoamento depende de sua complexidade e da
geometria do domínio. As malhas se dividem em estruturadas e não-estruturadas. As
malhas estruturadas (figuras 4.2 e 4.3) apresentam uma estrutura, uma regularidade na
distribuição espacial de seus pontos. Um exemplo de malha estruturada é a malha
hexaédrica. Também são utilizadas malhas não-estruturadas (figura 4.4) na
discretização dos domínios, sendo que, esses tipos de malha são caracterizados pela
ausência de regularidade na distribuição espacial dos pontos (malha tetraédrica). As
malhas não-estruturadas são mais utilizadas para geometrias complexas.
As malhas estruturadas podem ser uniformes (figura 4.2), quando seus pontos estão
igualmente espaçados, sendo muito utilizadas para geometria simples; também podem
ser não-uniformes (figura 4.3), quando seus pontos são espaçados de acordo com a
necessidade do domínio, possibilitando a aglutinação ou o maior espaçamento dos
pontos em áreas específicas. Os pontos aglutinados estão nas áreas em que se espera que
a variação espacial da solução seja grande. Já os pontos afastados entre si estão nas
regiões nas quais a solução apresenta pequena variação espacial. As malhas nãoestruturadas são geralmente não-uniformes.
77
Fig 4.2 Malha estruturada uniforme
Fig 4.3 Malha estruturada não-uniforme
Fig 4.4 Malha não-estruturada
78
4.4 Métodos de Discretização
Ao contrário dos métodos analíticos, que fornecem uma solução exata e fechada para as
equações diferenciais de interesse e para um número infinito de pontos; os métodos
numéricos resolvem essas derivadas para um número finito de pontos, que compõem a
malha, substituindo-as por expressões algébricas e aplicando-as para cada elemento de
volume. A forma de aplicação do método numérico é o que caracteriza o método de
discretização.
4.4.1
Método de Diferenças Finitas (MDF) e Método dos Elementos Finitos
(MEF)
O MDF utiliza as equações diferenciais parciais na forma numérica, em função dos
pontos da malha. São obtidas equações algébricas, escritas para cada ponto da região em
que se deseja calcular a solução de problema. Pode-se pensar, nas aproximações de
diferenças finitas como o inverso do processo de determinação do limite. As
aproximações de diferenças finitas podem ser obtidas de várias formas, como por
expansão em série de Taylor e interpolação polinomial.(Fortuna, 2000). A interpolação
é utilizada para se obter valores das variáveis em outros locais que não sejam nos nós da
malha.
O MEF se baseia na divisão do domínio em um conjunto de volumes discretos, ou
elementos finitos, geralmente não-estruturados. A característica marcante desse método
é a multiplicação das equações por uma função-peso antes de serem integradas em todo
o domínio, onde a solução é aproximada por uma função linear dentro de cada
elemento, garantindo a continuidade da solução através das condições de contornos em
cada elemento (Ferziper e Péric, 1996).
O MDF sempre foi empregado pelos analistas da área de escoamento de fluidos,
enquanto o MEF era utilizado na a área estrutural, para a solução de problemas de
elasticidade. Os problemas, do ponto de vista físico, são completamente diferentes. Os
de escoamento são altamente não-lineares (equações de Navier-Stokes), enquanto os da
79
elasticidade não possuem os termos convectivos, não-lineares, assemelhando-se a
problemas puramente difusivos de transferência de calor.
O MDF pode ser aplicado a qualquer tipo de malha, sendo usualmente aplicados a
malhas estruturadas, pois são mais simples e eficientes. Por outro lado, o MEF tem a
vantagem de usar malhas não-estruturadas, o que permite a resolução de problemas em
geometrias mais complexas. Portanto, até o início da década de 70, o que tínhamos era
um método com grande experiência na área de fluidos, mas sem habilidades para tratar
geometrias complexas (o MDF); e um método hábil no tratamento da geometria, mas
sem ferramentas pra tratar os termos convectivos presentes nas equações do movimento
(o MEF).
4.4.2
Método dos Volumes Finitos (MVF)
Os problemas encarados na seção 4.3.1, e outros similares, motivaram pesquisas para o
desenvolvimento e aprimoramento do método dos volumes finitos (MVF), no qual as
equações aproximadas são obtidas através de balanços de conservação da propriedade
envolvida (massa, quantidade de movimento, entalpia, etc.) no volume elementar. A
observação do caráter físico de cada termo da equação diferencial permitiu que métodos
mais robustos fossem desenvolvidos.
O método de volumes finitos é por vezes confundido com o método das diferenças
finitas, apesar de terem formulações bem diferentes, pois, em vários casos, as equações
discretizadas obtidas por ambos os métodos são iguais. Enquanto o método de
diferenças finitas tem uma dedução puramente matemática, a partir das aproximações de
derivadas usando séries de Taylor, a formulação do método de volumes finitos tem base
física, a partir da integração das equações diferenciais parciais em uma região, ou
volume, do espaço (Pinto e Lage, 2001). A sua desvantagem em relação ao método das
diferenças finitas é que para sistemas com escoamento tridimensional são necessários os
usos de interpolação e integração, ao passo que no método de diferenças finitas é
necessário somente interpolação.
80
A aplicação da técnica de volumes finitos permite escrever equações de diferenças
finitas que exprimem diretamente as equações desejadas. As equações diferenciais
parciais (EDPs) são integradas diretamente sobre a malha, o que facilita a obtenção das
equações de diferenças finitas e sua posterior solução numérica. A interpretação física
das equações resultantes da aplicação do método de volumes finitos, bem como a
possibilidade de aplicá-lo diretamente sobre as malhas com espaçamentos nãouniformes, em problemas com duas ou três dimensões, são duas das razões que
explicam sua popularidade. Esse método pode ser aplicado a qualquer tipo de malha e
para geometrias complexas. Praticamente todos os grandes pacotes de CFD hoje
disponíveis no mercado para a solução de problemas de escoamento de fluidos com
transferência de calor empregam o MVF (Maliska, 1995).
81
CAPÍTULO V
5. MATERIAIS E MÉTODOS
5.1 Computador e Pacote Computacional Utilizados
As simulações foram administradas em microcomputadores com as seguintes
características: Pentium IV 1,8 GHz, da Intel, e memória RAM de 522 MB. O software
utilizado para realização das simulações em fluidodinâmica computacional foi o CFX
5.6 da ANSYS Technology.
5.2 Variáveis de Interesse
As variáveis e perfis importantes na análise da performance de um hidrociclone são:
perfis de velocidade e de pressão, razão de fluido, eficiência granulométrica reduzida e
eficiência total.
5.3 Caracterização do Fluido de Perfuração
O fluido de perfuração, ou lama de perfuração, utilizada como fase contínua nas
simulações é a base de água, porém sua composição não foi fornecida por ser uma das
combinações utilizadas no processo de perfuração de poços da PETROBRÁS.
O fluido de perfuração analisado não é um fluido newtoniano, e sim pseudoplástico.
Pode-se portanto, aplicar a lei de potência para representar a viscosidade aparente µ’ e a
tensão de cisalhamento τ.
µ ' = Kγ n −1
(5.1)
τ = µ 'γ
(5.2)
82
Onde K é uma constante de proporcionalidade, γ é a taxa de cisalhamento e n é o
parâmetro de modelo. No presente trabalho, a caracterização da viscosidade do fluido
foi realizada em um viscosímetro FANN, muito utilizado na indústria petrolífera, com o
qual se obteve a curva a seguir da Figura 5.1:
Tensão cisalhante,
lbf/100ft 2
120
100
80
60
y =5,2703x0,4391
R2 =0,9996
40
20
0
0
200
400
600
800
1000
1200
-1
Taxa de cisalhamento, s
Fig. 5.1. – Gráfico da Tensão de cisalhamento de um fluido de perfuração I pseudoplástico
O ajuste da equação ao gráfico acima (Figura 5.1) foi excelente, como mostrado pelo R2
do gráfico, cujo valor está muito próximo de 1. As equações ajustadas para a
viscosidade e tensão de cisalhamento são dadas abaixo (5.3 e 5.4, respectivamente):
µ ' = 5,27 ⋅ γ −0,56
(5.3)
τ = 5,27 ⋅ γ 0, 44
(5.4)
Tabela 5.1
Caracterização do Fluido de Perfuração
Densidade
10,4 ppg ou 1246,2 kg/m3
Faixa de Viscosidades
1,082 – 21,108 p
5.4 Caracterização das Partículas
As partículas utilizadas para a simulação computacional são as partículas da 3M
especialmente confeccionadas para a técnica DGD. Essas esferas são feitas de material
compósito, e suas características são dadas a seguir na Tabela 5.2:
83
Tabela 5.2
Caracterização das Esferas ocas
Faixa de densidades
0,52 a 0,56 g/cm3
Faixa de tamanhos
1,0 a 3,0 mm
Pressão de Colapso
> 6.500 psi
Figura 5.2 – Esferas Ocas feitas de material compósito
Porém, as amostras das esferas recebidas por Maurer para viabilizar o estudo da
tecnologia DGD com utilização de esferas ocas de baixa densidade possuíam as
seguintes características (Maurer Technology, 2003), mostradas na Tabela 5.3:
Tabela 5.3
Caracterização das Amostras de Esferas ocas
(Maurer Technology, 2003)
Densidade média
0,53 g/cm3
Faixa de tamanho médio
2,7 a 3,0 mm
Pressão de colapso média
8.200 psi
Do histograma da densidade das partículas (Figura 5.3), pode-se calcular a média da
densidade da amostra como 0,53 g/cm3.
84
F
R
E
Q
Ü
Ê
N
C
I
A
Densidade da Esfera Oca (g/cm3)
Fig. 5.3 – Histograma da Densidade das Esferas feitas de Compósito
Para se saber a concentração necessária de esferas para um dado fluido de perfuração,
deve-se utilizar a equação (2.5) do capítulo 2, que é apropriada para um sistema DGD
no qual o fluido carreador das esferas é a própria lama de perfuração.
Com o auxílio da equação (2.5) podemos plotar um gráfico (Figura 5.4) da concentração
requerida de esferas no riser (Cv) para se encontrar uma determinada densidade dentro
do riser (ρriser). A intenção, segundo a técnica do DGD, é de se atingir dentro do riser a
densidade da água do mar, que é de 1,04 g/cm3 (8,7 ppg); porém, no projeto estudado,
seguindo orientações da Petrobrás a intenção era de se atingir 1,07 g/cm3 (8,91 ppg)
como densidade final no riser.
85
Densidade da Mistura no Riser pela Concentração Volumétrica das Esferas
8,7 ppg
13
13,00
10,4 ppg
Densidade no riser (ppg)
12
12,00
11,0 ppg
11,5 ppg
11
11,00
12,0 ppg
10,0 ppg
10
10,00
9
9,00
Densidade da água do
8
8,00
7
7,00
6
6,00
5
5,00
0
10
20
30
40
50
60
70
Concentração de esferas Cv (%)
Fig. 5.4 – Gráfico da concentração requerida de Esferas Ocas para baixar a densidade da Lama de
Perfuração no riser
Logo, para uma dada lama de perfuração com 1,246 g/cm3 (10,4 ppg) atingir a
densidade da água do mar, é necessário que se tenha em suspensão cerca de 28%, em
volume, de esferas ocas dentro riser. Entretanto, para se alcançar o valor de 1,07 g/cm3
(8,91 ppg), valor requerido pela Petrobrás, é necessário que se tenha em suspensão 24,5
% de esferas ocas misturadas à lama de perfuração, dentro do riser. Porém, para se obter
esta concentração no riser, deve-se injetar em sua base 1633 gpm de uma suspensão
com 35% de esferas ocas, uma vez que o fluido proveniente do anular do poço tem uma
vazão de 700 gpm (Figura 5.5).
86
Fig. 5.5 – Vazões e concentrações no ponto de injeção
A pressão de colapso das esferas é um fator muito importante para a sua caracterização.
Essa pressão de colapso deve ser suficientemente grande para suportar o peso da coluna
de fluido de perfuração acima dela e dentro do riser (ver capítulo 2, item 2.2.3.1). Para a
maioria das aplicações em perfuração com duplo gradiente – DGD – as partículas que
possuem pressão de colapso de até 6.000 psi são adequadas (Maurer, 2003). A Figura
5.6 mostra um histograma da pressão de colapso para as esferas ocas de compósito
fabricadas pela 3M.
F
R
E
Q
Ü
Ê
N
C
I
A
Pressão de Colapso (psi)
Fig. 5.6 – Histograma da Pressão de Colapso das Esferas feitas de Compósito
87
5.5 Planejamento Experimental e Geometrias Simuladas
O hidrociclone básico foi dimensionado através de programa feito em Fortran (Silva,
1989), onde se calculou o número de hidrociclones necessários, o diâmetro da seção
cilíndrica do equipamento, o diâmetro do underflow e a queda de pressão no
hidrociclone; as condições dadas para esse cálculo foram as densidades das partículas e
do fluido, a viscosidade do fluido, a razão de fluido desejada, a concentração de
partículas, a vazão total e o diâmetro de corte desejado. Este programa utiliza as
equações para simulação de performance de um hidrociclone, que foram apresentadas
no capítulo 2, seção 2.3.1.2.
As equações disponíveis para otimização da geometria de um hidrociclone são baseadas
em partículas mais densas que o fluido em fase contínua no equipamento. Utilizaram-se
essas mesmas equações para otimização do hidrociclone do presente trabalho, porém,
considerou-se positiva a diferença entre densidade da partícula e a do fluido. Os
resultados obtidos pelo programa foram o número de hidrociclones em paralelo igual a
16, diâmetro de hidrociclone de 17,0 cm, diâmetro do underflow de 3,40 cm.
Para o planejamento experimental, utilizou-se um programa, escrito em Visual Basic for
Aplications, denominado Essential Regression 97 (Steppan et al, 1998).
O planejamento utilizado RSM (Response Surface Modeling) foi o que permitiu a
identificação detalhada da dependência entre os fatores e a resposta. Ele se divide em
CCD (Central Composite Designs) e Box-Behnken Designs. Para maior simplificação,
iremos somente explicar o planejamento circunscrito central composto, que é um dos
que compõe o modelo CCD. Neste planejamento especificam-se os valores máximos e
mínimos de cada fator para gerar as simulações que conterão pontos axiais internos aos
dados.
A Tabela 5.4 mostra os valores adotados para os três fatores que foram variados (Di,
Do, Du) para obtenção de uma resposta (G’) com a fixação de 4 pontos centrais, que
junto às 14 corridas geradas pelo planejamento circunscrito composto central (central
composite), totalizaram 18 simulações computacionais.
88
Tabela 5.4
Faixa de Valores do Planejamento Circunscrito Central
Fatores
Mínimo
Central Máximo
1,78
2,38
2,98
Di (cm)
2,40
2,90
3,40
Do (cm)
3,40
4,25
5,10
Du (cm)
O diâmetro mínimo do overflow Do adotado foi de 8 vezes o tamanho máximo de
partícula, no intuito de se evitar entupimento quando da saída das esferas pelo overflow.
O diâmetro central do underflow Du foi calculado como o mesmo fosse o do overflow,
pois no presente trabalho o hidrociclone funciona ao contrário dos equipamentos
tradicionais, isto é, a saída das partículas se dá pelo overflow e desta forma utilizou-se
um Du central igual a 0,25 vezes o diâmetro da parte cilíndrica do hidrociclone. O valor
central adotado para o diâmetro de entrada Di foi de 0,14 vezes o diâmetro da parte
cilíndrica (recomendações Bradley, 1965).
O desenho esquemático de um hidrociclone convencional é mostrado na Figura 5.7 a
seguir:
Fig 5.7 – Desenho esquemático de um hidrociclone
89
Na confecção da geometria foram adotados alguns prolongamentos nas saídas do
overflow e do underflow para simularem, respectivamente, a saída para uma tubulação e
a saída para a atmosfera (descarga em um tanque ou container).
As dimensões das 18 geometrias a serem simuladas, variando Di, Do e Du, são
mostradas na Tabela 5.5.
Tabela 5.5 – Dimensões dos hidrociclones simulados
Exp Dc (cm) Di (cm) Do (cm) Du (cm)
17,0
2,40
2,90
4,25
1
17,0
2,40
2,90
4,25
2
17,0
2,76
2,60
4,76
3
17,0
2,76
3,20
3,74
4
17,0
2,04
3,20
3,74
5
17,0
2,04
2,60
3,74
6
17,0
2,04
2,60
4,76
7
17,0
2,76
3,20
4,76
8
17,0
3,00
2,90
4,25
9
17,0
2,76
2,60
3,74
10
17,0
2,40
2,40
4,25
11
17,0
2,40
2,90
4,25
12
17,0
2,40
2,90
4,25
13
17,0
2,40
2,90
3,40
14
17,0
1,80
2,90
4,25
15
17,0
2,04
3,20
4,76
16
17,0
2,40
2,90
5,10
17
17,0
2,40
3,40
4,25
18
L (cm) Ll (cm) l (cm)
89,50
8,50
5,61
89,50
8,50
5,61
86,29
8,50
5,61
92,71
8,50
5,61
92,71
8,50
5,61
92,71
8,50
5,61
86,29
8,50
5,61
86,29
8,50
5,61
89,50
8,50
5,61
92,71
8,50
5,61
89,50
8,50
5,61
89,50
8,50
5,61
89,50
8,50
5,61
94,90
8,50
5,61
89,50
8,50
5,61
86,29
8,50
5,61
84,10
8,50
5,61
89,50
8,50
5,61
5.6 Malhas
A malha utilizada é composta por elementos tetraédricos, contendo camadas de células
prismáticas próximo às paredes (inflated boundaries). Essas inflated boundaries são
apropriadas para utilização de funções de parede escalonáveis (ver item 3.3)
A malha é a principal responsável pela qualidade da solução, e deve-se atentar à sua
construção, a fim de que ela não influencie no resultado, mas que seja somente um
instrumento para chegar a ele. Sua manipulação no programa CFX 5.6 é muito difícil,
por isso, tentou-se obter malhas que estivessem dentro de uma determinada faixa de
valores tais que não houvesse significativa influência sobre o resultado e, ao mesmo
90
tempo, não tornasse a resolução computacional lenta e dispendiosa. Chegou-se a uma
faixa de valores entre 850.000 e 1.000.000 de elementos.
A Tabela 5.6 mostra o número de elementos de volume presente nas malhas utilizadas.
Tabela 5.6 – Nº elementos de volumes
presentes nas malhas
Experimento
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
Malha Utilizada
945.243
945.243
967107
879.179
1.002.274
956.911
914.883
915.826
923.259
1.074.397
930.337
945.243
945.243
898.341
942.387
937.645
948.786
907.685
No Anexo 2 podem ser encontradas as malhas descritas na Tabela 5.6.
5.7 Parâmetros Utilizados e Simulações Realizadas
As condições de contorno são: entrada, overflow, underflow e parede. A entrada foi
especificada no CFX como inlet, e as saídas overflow e underflow devem ser
especificadas como opening, pois nesta condição o escoamento se encontra livre para
entrar ou sair do equipamento.
Para a entrada devemos dar as vazões mássicas das esferas e do fluido de perfuração,
além de intensidade de turbulência, que foi calculada pela seguinte equação (Fluent,
2000):
I = 0,16 ⋅ Re
−1
8
(5.5)
91
Para o overflow e underflow foram especificadas as pressões manométricas de saída, e a
direção normal à superfície (para o overflow).
Essa combinação de condições de contorno, especificando no inlet a vazão mássica e
nas saídas a pressão, é a combinação mais robusta em termos de resolução
computacional, pois é simples de se prever a pressão total no inlet como resultado da
simulação (CFX, 2003).
Para a parede recomenda-se free slip (condição em que há deslizamento) (CFX, 2003)
para as partículas, e no slip (condição de não-deslizamento) para o fluido contínuo. A
implementação da condição de não-deslizamento implica que o fluido imediatamente
junto à parede tenha velocidade igual a ela, sendo que, nas simulações realizadas as
paredes são estáticas.
A Tabela 5.7 mostra a vazão média da lama de perfuração realizada numa plataforma
(cedido pela Petrobrás), e os valores utilizados para as condições de contorno da
alimentação do hidrociclone.
Tabela 5.7 – Condições de entrada da alimentação do hidrociclone
Valores para a Alimentação no Hidrociclone
Vazão mássica de Esferas Ocas
1,1946 kg/s
Concentração Volumétrica de Esferas Ocas
Vazão mássica de Lama de Perfuração
0,245
8,6561 kg/s
Intensidade de turbulência
0,055
Vazão total (para todos os hidrociclones)
147.189,4 cm3/s
Vazão de entrada (para um hidrociclone)
9.200 cm3/s
A Tabelas 5.8 mostra as condições de contorno usadas nas simulações realizadas.
Tabela 5.8 – Condições de contorno adotadas
Parâmetro
Valor
Pressão de Referência
1,013x105 Pa
Condição de Contorno: entrada
Vazões mássicas de alimentação
Condição de Contorno: Poverflow
0 Pa (manométrica)
Condição de Contorno: Punderflow
0 Pa (manométrica)
Parede: Partículas
Free slip
Parede: Fluido Contínuo
No slip
92
Tipo de Simulação
Estacionária
Função de parede
Escalonável
Modelo de Turbulência: Fluido
RNG κ−ε
Modelo de Turbulência: Partículas Dispersed Phase Zero Equation
Velocidade e Fração Volumétrica de
Condições iniciais
Entrada
Critério de convergência
RMS (Raiz do desvio quadrático médio)
1 x10-8
Resíduo máximo permitido
5.8 Eficiência Total de Separação
O cálculo da eficiência total de separação requer que se conheça a eficiência
granulométrica reduzida de alguns tamanhos de partícula, obtendo-se assim um gráfico
com a distribuição de eficiência granulométrica reduzida versus o diâmetro da partícula.
A partir deste gráfico obtém-se o diâmetro de corte reduzido (d’50), que traduz o
tamanho da partícula no qual se obtém uma eficiência granulométrica reduzida de 50%.
A equação de Rosin-Rammler-Bennet modificada (2.13, capítulo 2), ou da eficiência
granulométrica reduzida, deve ser linearizada (5.9) e, conseqüentemente, deve-se plotar
y versus x, e se ajustar uma curva ao gráfico linearizado, para se poder calcular o
expoente n.
⎛ d ⎞
⎡ ⎛ 1 ⎞⎤
⎟⎟ + ln(0,693)
ln ⎢ln⎜
⎟⎥ = n ⋅ ln⎜⎜
1 − G ' ⎠⎦
'
d
⎝
⎣
50
⎝ 24
144244
3
1
4
3⎠
y
(5.6)
x
Com os devidos valores da potência (n) e d’50 é possível calcular-se a eficiência total
reduzida (Et’) do hidrociclone otimizado através da integração de G’ (equação 2.15,
capítulo 2). Esta equação, substituída em G’ e em d torna-se a equação (5.11).
Da distribuição de RRB (Rosin e Rammler, 1933) para as partículas:
93
⎡ ⎛ d ⎞m ⎤
y = 1 − exp ⎢− ⎜ ⎟ ⎥
⎣⎢ ⎝ k ⎠ ⎦⎥
1
⎡
⎛
⎢
⎜ ⎡ ⎛ 1 ⎞⎤ m
⎟⎟⎥
⎢
⎜ k ⋅ ⎢ln⎜⎜
1
⎢
⎜ ⎣ ⎝ 1 − y ⎠⎦
'
ET = ∫ 0 1 − exp ⎢− 0,693⎜
'
d 50
⎢
⎜
⎢
⎜⎜
⎢⎣
⎝
(5.7)
⎞
⎟
⎟
⎟
⎟
⎟
⎟⎟
⎠
n
⎤
⎥
⎥
⎥
⎥dy
⎥
⎥
⎥⎦
(5.8)
Finalmente, com os valores da eficiência total reduzida e da razão de fluido se poderá
calcular a eficiência total (Et) do equipamento, equação (5.12) abaixo:
(
)
ET = E 'T 1 − R f + R f
(5.9)
94
CAPÍTULO VI
6. RESULTADOS E DISCUSSÕES
6.1 Resultados Gerais
Os resultados gerais das 18 simulações realizadas estão descritos na Tabela 6.1 abaixo.
Para cada simulação realizada temos queda de pressão, vazões de esferas na
alimentação (Qs) e no overflow (Qso), razão de fluido (Rf), eficiência granulométrica,
eficiência granulométrica corrigida e concentração volumétrica de esferas no overflow.
Todas as simulações foram conduzidas com o modelo RNG κ−ε, porém, para atingir a
convergência mais rapidamente, utilizaram-se como valores iniciais os resultados
obtidos com o modelo de equação zero e com o modelo κ−ε.
Tabela 6.1 Resultados Gerais
Geometria Di (cm) Do (cm) Du (cm)
geo1
geo2
geo3
geo4
geo5
geo6
geo7
geo8
geo9
geo10
geo11
geo12
geo13
geo14
geo15
geo16
geo17
geo18
2,40
2,40
2,76
2,76
2,04
2,04
2,04
2,76
3,00
2,76
2,40
2,40
2,40
2,40
1,80
2,04
2,40
2,40
2,90
2,90
2,60
3,20
3,20
2,60
2,60
3,20
2,90
2,60
2,40
2,90
2,90
2,90
2,90
3,20
2,90
3,40
4,25
4,25
4,76
3,74
3,74
3,74
4,76
4,76
4,25
3,74
4,25
4,25
4,25
3,40
4,25
4,76
5,10
4,25
∆P
(bar)
0,851
0,851
0,580
0,620
1,809
1,828
1,679
0,547
0,047
0,612
0,884
0,851
0,851
1,049
2,683
1,591
0,800
0,903
Qso
Qs
3
(cm /s) (cm3/s)
2,242
2,242
2,245
2,242
2,274
2,289
2,234
2,214
2,223
2,216
2,246
2,242
2,242
2,221
2,236
2,222
2,224
2,236
0,809
0,809
0,562
1,096
1,014
0,834
0,478
0,685
0,764
0,899
0,473
0,809
0,809
1,194
0,527
0,560
0,384
0,940
Rf
G
G' (%)
Cvo
0,198
0,198
0,129
0,318
0,271
0,218
0,155
0,179
0,210
0,251
0,153
0,198
0,198
0,316
0,121
0,129
0,095
0,247
0,361
0,361
0,250
0,489
0,446
0,365
0,214
0,309
0,344
0,406
0,211
0,361
0,361
0,538
0,236
0,252
0,173
0,420
20,33
20,33
13,96
25,10
24,02
18,74
7,03
15,89
16,94
20,69
6,81
20,33
20,33
32,40
13,01
14,11
8,56
23,02
0,361
0,361
0,250
0,489
0,446
0,365
0,214
0,309
0,344
0,406
0,211
0,361
0,361
0,538
0,236
0,252
0,173
0,420
Os cálculos da razão de fluido, eficiência granulométrica e eficiência granulométrica
reduzida foram feitos com as equações (2.7), (2.10) e (2.11).
95
Os resultados mostram que o hidrociclone com a geometria 14 forneceu a maior
eficiência granulométrica reduzida (32,4 %), como também a maior concentração
volumétrica de esferas no overflow (53,8 %).
96
6.2 Comparação e Escolha entre Modelos de Turbulência
As simulações 3 e 8 foram feitas para os seguintes modelos de turbulência: κ−ε e RNG
κ−ε. Os resultados são mostrados na Tabela 6.2.
Tabela 6.2 – Comparações entre os modelos de turbulência
Simulação
Modelo
Turb.
geo3
geo3
geo8
geo8
κ−ε
RNG κ−ε
κ−ε
RNG κ−ε
d (mm) DP (bar)
2,7
2,7
2,7
2,7
0,601
0,580
0,568
0,547
Rf (%)
G (%)
G' (%)
0,1248
0,1289
0,1700
0,1790
24,229
25,048
29,450
30,944
13,425
13,955
15,005
15,886
O modelo κ−ε também foi utilizado como valor inicial para outras simulações (exceto
para a simulação 4 que utilizou o modelo à equação zero), porém, nesses casos, não
deixou-se atingir o critério de convergência; antes de atingí-lo, paravam-se as
simulações e modificava-se o modelo de turbulência para o modelo RNG κ−ε.
Percebe-se que o modelo κ−ε superestimou a queda de pressão em relação ao modelo
RNG κ−ε e, no entanto, subestimou a razão de fluido e eficiências granulométricas.
O modelo de turbulência RNG κ−ε foi escolhido para simulação dos hidrociclones
(geometrias 1 a 18) com base nas informações abaixo:
-
O modelo κ−ε não é indicado para escoamentos com curvaturas nas linhas de
corrente e anisotropia (Deschamps; 2002).
-
Baseado na literatura, vê-se que o modelo RNG κ−ε tem sido muito utilizado
em simulações de escoamento em hidrociclones (Dyakowsky e Williams, 1993;
Malhotra et al, 1994; Dai et al, 1999; He et al, 1999). Este modelo é defendido
por Orszag et al. (1993) e Deschamps (2002) quanto a seus resultados em
situações com regiões curvas, entre outras (ver item 3.3.1.2, letra b).
97
Embora o modelo RNG κ−ε seja defendido e utilizado por sua robustez e estabilidade,
além do menor tempo computacional requerido, o modelo que é indicado por
Deschamps (2002) e pelo manual do CFX 5.6 (2003) para escoamentos complexos é o
modelo dos tensores de Reynolds RSM (ver item 3.3.2), entretanto, por resolver os
tensores de Reynolds, este modelo requer maiores esforços computacionais e a
experiência da literatura (descritas no parágrafo acima) nos assegura a viabilidade da
utilização do modelo escolhido RNG κ−ε.
6.3 Regressão Linear
Foi realizada uma regressão nos resultados obtidos para as 18 simulações utilizando o
programa EREGRESS (Steppan et al, 1998).
As equações lineares ajustadas para conter somente constantes com significância
adequada (< 0,1) foram utilizadas como modelo de predição das respostas G e Cvo,
equações (6.1) e (6.2) respectivamente. Para visualizar a qualidade do modelo deve-se
plotar o valor da variável simulada e o valor da variável predita para, assim, ajustar uma
linha de tendência e encontrar os coeficientes de correlação R e R2. Entretanto, somente
uma combinação adequada dos valores de R2, R2 ajustado e R2 para predição podem nos
dar uma impressão do ajuste do modelo à realidade prática. Num bom modelo esses três
parâmetros não devem diferir muito entre si (Steppan et al, 1998).
As variáveis de entrada do modelo de regressão foram os diâmetros do hidrociclone Di,
Do e Du, pois foram estas variáveis também as utilizadas como fatores para o
planejamento experimental (item 5.5). As variáveis de saída ou de resposta foram duas:
eficiência granulométrica e concentração volumétrica de sólidos no overflow.
Com o resultado da regressão linear pode ser avaliada a dependência de G e Cvo em
relação aos diâmetros do hidrociclone. Depois foi realizada uma otimização dos
diâmetros do hidrociclone, utilizando o solver do excel, para se obter a geometria de
maior eficiência granulométrica tal que a concentração de partículas na saída do
98
hidrociclone fosse maior que 35%, que é a concentração de esferas necessária para se
atingir a densidade desejada no riser (ver item 5.3).
Uma análise da significância das variáveis envolvidas no modelo foi realizada, ou seja,
apenas um modelo com significâncias próximas de zero e R2 mais próximos da unidade
representaria um modelo eficiente. Para o G o modelo escolhido está mostrado na
Tabela 6.3, e para a concentração volumétrica de esferas o modelo escolhido está
mostrado na Tabela 6.5.
A equação obtida para a regressão linear de G é mostrada na equação abaixo (6.1), onde
se percebe a dependência linear da eficiência granulométrica com Di, Do e Du e a
dependência quadrática em função de Di. Os valores das constantes, sua significância e
erro padrão estão na Tabela 6.4:
G = b0 + b1 ⋅ Di + b 2 ⋅ Do + b3 ⋅ Du + b 4 ⋅ Di 2
(6.1)
Tabela 6.3 – Regressão linear quadrática para G
G = b0 + b1*Di + b2*Do + b3*Du + b4*Di*Di
Valores
Significância
b0
-0,313
0,377
b1
0,779
0,01453
b2
0,151
3,425e-05
b3
-0,187
8,209e-09
b4
-0,147
0,02386
O gráfico da Figura 6.1 mostra os valores preditos pela equação (6.1) versus os valores
encontrados para as simulações para G, e a Tabela 6.4 mostra o ajuste do gráfico e seu
erro padrão.
99
Fig. 6.1 – Gráfico que compara o G previsto pelo modelo quadrático e o G obtido nas simulações
Tabela 6.4
Coeficientes de Ajuste da Regressão
|R|
0,972
2
0,946
2
R ajustado
0,929
Erro Padrão
0,02698
R
2
R para Predição
0,883
Pode-se concluir que o modelo se ajustou bem às respostas dos valores simulados de G,
pois os coeficientes de correlação estão próximos e o erro padrão é pequeno (2,7 %).
A equação obtida para a regressão linear de Cvo é mostrada na equação abaixo (6.2)
onde se percebe a dependência da concentração de esferas no overflow com Di e Do
linearmente, e com Di e Do*Du quadraticamente. Os valores das constantes, sua
significância e erro padrão estão na Tabela 6.5:
C vo = b0 + b1 ⋅ Di + b 2 ⋅ Do + b3 ⋅ Di 2 + b 4 ⋅ Do ⋅ Du
(6.2)
Tabela 6.5 – Regressão linear quadrática para Cvso
Cvo = b0 + b1*Di + b2*Do + b3*Di*Di + b4*Do*Du
Valores
Significância
b0
-1,109
0,00477
b1
0,779
0,01231
b2
0,426
4,819e-09
b3
-0,147
0,02056
b4
-0,06455
5,529e-09
100
O gráfico da Figura 6.2 mostra os valores preditos pela equação (6.2) versus os valores
encontrados para as simulações para Cvo, e a Tabela 6.6 mostra o ajuste do gráfico e seu
erro padrão.
Fig. 6.2 – Gráfico que compara o Cvso previsto pelo modelo quadrático e o Cvso obtido nas simulações
Tabela 6.6
Coeficientes de Ajuste da Regressão
|R|
2
R
2
R ajustado
Erro Padrão
R2 para Predição
0,974
0,949
0,933
0,02618
0,890
Pode-se concluir que o modelo se ajustou bem às respostas dos valores simulados de
Cvo, pois os coeficientes de correlação estão próximos e o erro padrão é pequeno (2,6
%). Este modelo é ainda melhor que o primeiro, porque seus coeficientes de correlação
são maiores.
Através das equações (6.1) e (6.2), com os respectivos valores de suas constantes
(Tabelas 6.3 e 6.5), pode-se otimizar a geometria de um hidrociclone para separação de
esferas ocas de lama de perfuração, impondo-se quatro condições: concentração de
esferas no overflow superior a 35%; diâmetro de entrada, overflow e underflow devem
estar entre os valores máximos e mínimos que estão na Tabela 5.4.
101
O hidrociclone ótimo encontrado é aquele que possui: Di de 2,35 cm, Do de 3,4 cm e
Du de 3,4 cm.
6.4 Simulações com a Geometria Ótima
Após encontrar a geometria otimizada (ver Tabela 6.8), através de regressão linear
quadrática, foram feitas mais sete simulações com essa geometria. Dentre essas
simulações, cinco utilizaram o fluido de perfuração mais viscoso (Tabela ) para
tamanhos de partículas diferentes (Tabela 6.8); outras duas simulações foram realizadas
para um fluido de perfuração menos viscoso (Tabela 6.7) e dois tamanhos de partículas.
As propriedades da lama de perfuração II, que é uma lama menos densa e viscosa que a
primeira, à base de carbonato, são as seguintes:
Tabela 6.7
Caracterização do Fluido de Perfuração II
1,1 kg/m3
Densidade
Faixa de Viscosidade
0,0289 – 2,6514 p
A Tabela 6.8 mostra as dimensões do hidrociclone de geometria otimizada, e a Tabela
6.9 mostra as novas simulações feitas para a geometria otimizada.
Tabela 6.8 – Geometria Otimizada
Exp Dc (cm) Di (cm) Do (cm) Du (cm) L (cm) Ll (cm) l (cm)
17,0
1
2,35
3,40
3,40
94,90
8,50
5,61
Tabela 6.9 – Simulações feitas com a Geometrias Otimizada
Exp
19
20
21
22
23
24
25
Dc (cm) Di (cm) Do (cm) Du (cm)
17,0
17,0
17,0
17,0
17,0
17,0
17,0
2,65
2,65
2,65
2,65
2,65
2,65
2,65
3,40
3,40
3,40
3,40
3,40
3,40
3,40
3,40
3,40
3,40
3,40
3,40
3,40
3,40
Malha
874.884
874.884
874.884
874.884
874.884
874.884
874.884
Lama
Dp(mm)
Utilizada
I
1,0
I
1,5
I
2,1
I
2,7
I
3,0
II
2,7
II
3,0
102
Abaixo a caracterização da viscosidade do fluido de perfuração II, ou menos viscoso,
foi realizada em um viscosímetro FANN, e os valores da tensão de cisalhamento em
função da taxa de cisalhamento estão plotadas no gráfico da Figura 6.3.
Fig. 6.3 – Gráfico da Tensão de cisalhamento de um fluido de perfuração II pseudo-plástico
6.5 Resultados Gerais
A tabela a seguir mostra os resultados para uma mesma geometria, geometria otimizada
(Tabela 6.10). São apresentados a queda de pressão, a razão de fluido, as eficiências
granulométricas, a concentração volumétrica das esferas na saída, o tipo de fluido
contínuo (fluido de perfuração I ou II) e os diâmetros de partícula rodados.
Tabela 6.10 Resultados Gerais
Geometria Dp (mm)
geo20_sim19
1,00
geo20_sim20
1,50
geo20_sim21
2,10
geo20_sim22
2,70
geo20_sim23
3,00
geo20_sim24
2,70
geo20_sim25
3,00
Lama
I
I
I
I
I
II
II
∆P (bar)
0,763
0,764
0,766
0,758
0,768
0,760
0,760
Rf
0,4042
0,380
0,3812
0,3803
0,3815
0,3701
0,3636
G
0,4753
0,4905
0,5831
0,6245
0,6587
0,7770
0,8131
G' (%)
11,9341
17,8265
32,6266
39,4013
44,8181
64,5935
70,6386
Cvo
0,475
0,489
0,583
0,624
0,644
0,777
0,813
103
6.6 Eficiência Granulométrica Reduzida e Diâmetro de Corte
Da curva de eficiência granulométrica reduzida versus dp (diâmetro de partícula)
podemos achar o diâmetro de corte reduzido, através do ajuste de um polinômio. Para os
dados apresentados, d’50 = 3,23 mm.
A Figura 6.5 abaixo mostra a curva de eficiência granulométrica reduzida em função do
tamanho de partícula para as simulações 19 a 23, com a lama de perfuração mais
viscosa.
A Figura 6.6 mostra a curva de eficiência granulométrica reduzida em função do
diâmetro de corte reduzido (d’50) adimensionalizado (d/d’50). De acordo com
Nageswararao (1995) e Coelho e Medronho (2001), esta curva é a mesma para
hidrociclones convencionais, independente da geometria.
Fig. 6.4 – Ajuste da curva de eficiência granulométrica reduzida para se extrair o diâmetro de corte
104
Fig. 6.5 – Curva de eficiência granulométrica reduzida para a geometria otimizada Bradley
Fig. 6.6 – Curva de eficiência granulométrica reduzida versus d/d’50 para a geometria otimizada Bradley
105
Utilizou-se a equação de Rosin-Rammler-Bennett Modificada (equação 2.13), com a
potência obtida por Leahy-Dios e Medronho (2003) para ajustar os pontos obtidos para
eficiência granulométrica do hidrociclone otimizado, como mostram as Figuras 6.5 e
6.6. Como pode ser observado, estes pontos ajustam-se razoavelmente bem à equação
de Rosin-Rammler-Bennett Modificada e com um expoente n = 2, equação (6.3), o que
indica que esta equação pode ser usada para qualquer geometria de hidrociclones.
⎡
⎛ d
G' = 1 − exp ⎢− 0,693⎜⎜
⎢
⎝ d' 50
⎣
⎞
⎟⎟
⎠
2
⎤
⎥
⎥
⎦
(6.3)
6.7 Resultados Gráficos de uma Geometria Otimizada e Discussões
Escolheu-se a simulação 22, com a lama de perfuração mais viscosa, que simulou o
diâmetro de partícula de 2,7 mm, para se visualizar os perfis de velocidade, pressão e
linhas de corrente no fluido.
Nas Figuras 6.7 e 6.8 podem ser vistas as linhas de corrente e os vetores velocidade do
fluido de perfuração em escoamento no interior do hidrociclone. Nestas figuras pode-se
notar o vórtice descendente externo, que irá gerar o underflow, e o vórtice ascendente
interno, que irá formar o overflow.
Fig. 6.7 – Linhas de correntes do fluido
Fig. 6.8 – Vetores Velocidade
106
Observar na Figura 6.9 o by-pass das esferas ocas, previsto no item 2.3.2 (letra c) que
fala sobre perfil de velocidade radial no hidrociclone.
Fig. 6.9 – Velocidade Axial
Na Figura 6.10 observa-se o perfil de velocidades verticais do hidrociclone.
Fig. 6.10 – Velocidade Axial
107
A Figura 6.11 mostra o perfil de pressão manométrica da geometria escolhida, onde o
hidroclone foi alimentado com partículas sólidas de 2,7 mm.
Fig. 6.11 – Perfil de Pressão no hidrociclone
O perfil de pressão na parede do hidrociclone pode ser observado na Figura 6.12. Notar
a maior pressão na região de “impacto” do fluido logo na entrada do hidrociclone.
108
Fig. 6.12 – Perfil de Pressão no hidrociclone
Pode-se notar o efeito sobre o perfil de pressões devido à projeção do tubo de overflow
para o interior do corpo do hidrociclone, projeção essa conhecida como vortex finder. O
gradiente de pressão do tubo de overflow se estende pelo vortex finder e se propaga
abaixo dele.
6.8 Eficiência Global de Separação para Fluido Mais Viscoso
A curva de distribuição de tamanhos de partículas de Weibull utilizada para o cálculo da
eficiência global de separação é a seguinte:
⎡ ⎛ d − a ⎞m ⎤
y = 1 − exp ⎢− ⎜
⎟ ⎥
⎣⎢ ⎝ k ⎠ ⎥⎦
(6.4)
Onde a é o tamanho da menor partícula (considerou-se 2,7 mm), k e m são parâmetros
do modelo.
⎡ ⎛ d − 2,7 ⎞3,1 ⎤
y = 1 − exp ⎢− ⎜⎜
⎟ ⎥
0,194 ⎟⎠ ⎥
⎣⎢ ⎝
⎦
(6.5)
Então a equação para a eficiência global (5.8) se torna:
2
1
⎡
⎞ ⎤
⎛
3
,
1
⎟ ⎥
⎜
⎡ ⎛ 1 ⎞⎤
⎢
⎟⎟⎥ + 2,7 ⎟ ⎥
⎜ 0,194 ⋅ ⎢ln⎜⎜
⎢
1
⎣ ⎝ 1 − y ⎠⎦
⎟ ⎥dy
ET' = ∫ 1 − exp ⎢− 0,693⎜
⎟ ⎥
⎜
0
⎢
3,23
⎟ ⎥
⎜
⎢
⎟ ⎥
⎜
⎢
⎠ ⎦⎥
⎝
⎣⎢
(6.6)
Logo, calculando-se a integral achamos uma eficiência global reduzida de E’t = 0,4221.
109
Para uma razão de fluido de 38,55 % (média entre as razões de fluido das simulações),
calcula-se a eficiência global de separação pela equação (5.9):
Et (%) = 64,5.
6.9 Eficiência Global de Separação para Fluido Menos Viscoso
Achou-se o diâmetro de corte reduzido através do gráfico de G’ (eficiência
granulométrica reduzida) versus dp (diâmetro de partícula). Esse valor para d’50é de
2,11 mm.
Utilizando-se a distribuição de tamanho de partículas do item 6.8 para as partículas das
simulações 24 e 25, temos a equação 6.5.
Então a equação para a eficiência global (5.8) se torna:
2
1
⎤
⎡
⎞
⎛
⎟ ⎥
⎜
⎡ ⎛ 1 ⎞⎤ 3,1
⎢
⎟⎟⎥ + 2,7 ⎟ ⎥
⎜ 0,194 ⋅ ⎢ln⎜⎜
⎢
1
y
−
1
⎠⎦
⎣ ⎝
⎟ ⎥dy
ET' = ∫ 1 − exp ⎢− 0,693⎜
⎟ ⎥
⎜
0
⎢
2,11
⎟ ⎥
⎜
⎢
⎟ ⎥
⎜
⎢
⎠ ⎦⎥
⎝
⎣⎢
(6.6)
Logo, calculando-se a integral achamos uma eficiência global reduzida de E’t = 0,7231.
Para uma razão de fluido de 36,68 % (média entre as razões de fluido das simulações),
calcula-se a eficiência global de separação pela equação (5.9):
Et (%) = 82,47.
110
CAPÍTULO VII
7. CONCLUSÕES
Uma bateria com 16 hidrociclones de 17,0 cm de diâmetro foi projetada para a
separação de esferas ocas de lama de perfuração, na técnica de gradiente duplo de
perfuração. A bateria de hidrociclones foi projetada para uma vazão de 0,1472 m3/h de
lama de perfuração contendo 24,5% de concentração de esferas. A geometria do
hidrociclone foi otimizada, com auxílio de CFD, de tal forma que sua eficiência total de
separação para a lama de perfuração mais viscosa foi de 64,5 % e para a lama de
perfuração menos viscosa de 82,47 %.
Uma solução para maximizar a recuperação de esferas ocas para cerca de 100 % das
esferas ocas, que é a recuperação desejada, poderá ser feita através da utilização da
geometria otimizada em substituição aos dessiltadores existentes (para separação de
esferas ocas de silt). Esse hidrociclone recuperaria pelo overflow as esferas ocas
concentradas na lama de perfuração, e pelo underflow sairiam as esferas ocas que
escaparam mais as partículas de silt. A recuperação total das esferas seria feita através
de peneiras situadas após o underflow do hidrociclone, e as esferas ocas, por serem
maiores em diâmetro, seriam primeiramente separadas, e após sua separação as
partículas de silt são retidas na peneira, pois são partículas mais finas. Assim, a lama de
perfuração sem esferas e sem silt estaria pronta para ser re-injetada no poço. E,
conseqüentemente, a mistura de saída do overflow, concentrada em esferas, e deve
também receber as partículas recuperadas pelo underflow deve ser diluída até atingir a
concentração necessária para sua re-injeção na base do riser. Também se sugere que,
quando for possível, utilize-se o fluido menos viscoso para perfuração, pois a eficiência
global de separação é maior, como pode ser visto no item 6.9.
Abaixo, na figura 7.1, a proposta de separação de esferas ocas, utilizando hidrociclone
para tentar viabilizar a tecnologia de duplo gradiente de perfuração.
111
Fig. 7.1 Sugestão para separação de esferas ocas do sistema DGD
112
NOMENCLATURA
LETRAS LATINAS
Símbolo
Descrição
Dimensão
a
Diâmetro da esfera oca
L
b
Diâmetro da esfera oca
L
B
Somatório das forças que atuam num corpo
M L T-2
Cε1
Constante do modelo κ−ε
-
Cε2
Constante do modelo κ−ε
-
Cµ
Constante do modelo κ−ε
-
Cε2RNG
Constante do modelo RNG κ−ε
-
CµRNG
Constante do modelo RNG κ−ε
-
Cv
Concentração volumétrica dos sólidos na alimentação
Cvo
Concentração volumétrica dos sólidos no overflow
d’50
Diâmetro de corte do hidrociclone
L
Dc
Diâmetro do corpo cilíndrico do hidrociclone
L
Di
Diâmetro da alimentação do hidrociclone
L
Do
Diâmetro do overflow do hidrociclone
L
Du
Diâmetro do underflow do hidrociclone
L
Dw
Profundidade da lâmina d’água
L
Et
Eficiência global do hidrociclone
E’t
Eficiência global reduzida do hidrociclone
Eu
Número de Euler
fµ
Constante de proporcionalidade (viscosidade turbulenta)
-
fη
Coeficiente do modelo RNG κ−ε
-
G
Eficiência granulométrica calculada para um dado tamanho
de partícula
G’
Eficiência granulométrica reduzida calculada para um dado
tamanho de partícula
g
Vetor gravidade
k
Constante da equação de Rosin-Rammler
k1, k2 e k3
Coeficientes para as equações de Medronho (1984) e
Medronho e Antunes (1992)
l
Comprimento do vortex finder do hidrociclone
L
L
Comprimento do hidrociclone (seção cilíndrica e cônica)
L
L T-2
113
LETRAS LATINAS
Ll
Comprimento da seção cilíndrica do hidrociclone
L
lt
Escala de comprimento turbulento
L
m
Constante da equação de Rosin-Rammler
n1, n2, n3, n4, Coeficientes para as equações de Medronho (1984) e
n5 e n6
Medronho e Antunes (1992)
p
Pressão estática parcial
M L-1 T-2
p’
Pressão modificada (modelo viscosidade turbulenta)
M L-1 T-2
p”
Pressão modificada (modelo κ−ε)
M L-1 T-2
Pc
Pressão de colapso das esferas ocas
M L-1 T-2
Pmar
Pressão no fundo do mar
M L-1 T-2
Pk
Produção de turbulência por cisalhamento (modelos κ−ε )
M L-1 T-2
q
Vazão de lama que passa pela coluna de perfuração e pelo
poço (antes do ponto de injeção)
L3 T
Q
Vazão de entrada do hidrociclone
L3 T
Qs
Vazão na linha de injeção
L3 T
Re
Número de Reynolds
Rf
Fator divisor do fluido ou razão de fluido
Stk50
número de Stokes
u
Flutuação do vetor velocidade em torno da média
L T-1
U
Valor médio do vetor velocidade
L T-1
Ut
Escala de velocidade turbulenta
L T-1
v
Velocidade calculada na seção cilíndrica do hidrociclone
L T-1
Ws
Vazão mássica de sólidos alimentados no hidrociclone
M T-1
Wso
Vazão mássica de sólidos no overflow
M T-1
y
Distribuição cumulativa menor que dado tamanho de
partícula
y+
Função Yplus, que mede a distância até a parede
-
LETRAS GREGAS
βRNG
Constante do modelo RNG κ−ε
-
∆p
Queda de pressão no hidrociclone
M L-1 T-2
∆priser
Queda de pressão por atrito no riser
M L-1 T-2
ε
η
Taxa de dissipação da energia cinética turbulenta
L2 T-3
Coeficiente do modelo RNG κ−ε
-
κ
Energia cinética turbulenta (por unidade de massa)
L2 T-2
114
µ
Viscosidade dinâmica ou absoluta
M L-1 T-1
µT
Viscosidade turbulenta
M L-1 T-1
µ eff
Viscosidade efetiva
M L-1 T-1
ρ
Densidade do fluido
M L-3
ρm
Densidade da partícula
M L-3
ρs
Densidade do material que compões a partícula
M L-3
ρlama
Densidade da lama de perfuração quando sozinha
M L-3
ρmistura
Densidade da mistura de lama de perfuração e esferas ocas
M L-3
no tubo de injeção
ρriser
Densidade da mistura de lama de perfuração e esferas ocas
M L-3
no riser
θ
Ângulo do cone do hidrociclone
σε
Constante do modelo κ−ε
-
σκ
Constante do modelo κ−ε
-
τ
Tensor tensão de 2ª ordem
M L-1 T-2
σεRNG
Constante do modelo RNG κ−ε
-
σκRNG
Constante do modelo RNG κ−ε
-
τT
Tensor tensão turbulento
M L-1 T-2
ζ
Viscosidade bulk
M L-1 T-1
SOBRESCRITOS E SUBSCRITOS
o
u
V
T
κ
ε
RNG
Overflow
Underflow
Viscoso
Turbulento (pode ser sub ou sobrescrito)
Relativo à energia cinética
Relativo à taxa de dissipação da energia cinética
Relativo ao modelo de mesmo nome RNG κ−ε
OPERADORES DIVERSOS
∇
∇
∇•
2
⊗
δij
d
Gradiente
Operador Laplaciano
Divergente
Produto diádico entre dois vetores
Delta de Kronecker
Significa que está aplicado para um dado tamanho de partícula
115
ABREVIAÇÕES MAIS UTILIZADAS
BOP – Blowout Preventer, faz parte do sistema de segurança do poço.
CFD – fluidodinâmica computacional.
CFX – software utilizado para as simulações.
DGD – dual gradient drilling, ou, duplo gradiente de perfuração.
DSV – drill string valve (válvula de retenção de perfuração).
ESPs – electric-submersible pumps (bombas submersíveis elétricas).
HGS – Hollow Glass Spheres (Esferas Ocas de Vidro).
LZVV - Locus of zero vertical velocity (região de velocidade axial vertical nula).
PDC – Polycrystalline Diamond Compact (Diamante Policristalino Compacto).
SMD – Subsea Mudlift Drilling (Perfuração com Lifting Submerso de Lama).
SRD – Subsea Rotanting Diverter (Desviador Rotatório Submerso), tecnologia SMD.
SSPS – Shell’s Subsea Pumping System (Sistema de Bombeamento Submerso da Shell).
TSP – Thermal Stable Polycristalline (Diamante Policristalino Termicamente Estável).
116
REFERÊNCIAS
Bird, R. Byron; Stewart, Warren E.; Lightfoot Edwin N.: Transport Phenomena;
2nd. edition; John Wiley & Sons, Inc.; 2002.
Bradley, D., The Hydrociclone, Pergamon Press, Oxford, 1965.
Castilho, L.R., Medronho, R.A.: A Simple Procedure for Design and Perfomance
Prediction of Bradley and Rietema Hydrociclones, Minerals Engineering, 13 (2), p.
183-191, 2000.
CFX-5.6, Manual, ANSYS Technology, 2003.
Choe, J. and Juvkam-Wold, H.C., Riserless Drilling and Well Control for Deep
Water Applications, Proceedings, 1997 IADC International Deep Water Well Control
Conference and Exhibition, Houston, Texas, 15-16 September 1997.
Choe, J., and Juvkam-Wold, H.C., Well Control Aspects of Riserless Drilling, paper
SPE 49058, 1998 SPE Annual Technical Conference and Exhibition, New Orleans, LA,
27-30 September 1998.
Choe, J., Analysis of Riserless Drilling and Well Control Hydraulics, SPE Drilling &
Completion, Vol. 14, No. 1, p. 71-81, March 1999.
Coelho, M.A.Z. e Medronho, R.A, A Model for Performance Prediction of
Hydrocyclones, Chemical Engineering Journal, Vol. 84, p.7-14, 2001.
Dai, G.Q., Li, J.M., Chen, W.M., Numerical Prediction of the Liquid Flow within a
Hydrocyclone, Chemical Engineering Journal, 74, p. 217-233, 1999.
Deschamps, C.J., Capítulo 3: Modelos Algébricos e Diferenciais, Em Freire, A.P.S.,
Menut, P.P.M., e Su, J. (eds.), Turbulência, Ediouro Gráfica e Editora S.A., Volume 1,
Rio de Janeiro, 2002.
117
Dyakowsky, T., Williams, R.A., Modelling Turbulent Flow within a Small-Diameter
Hydrocyclone, Chemical Engineering Science, 48, No. 6, p. 1143-1152, 1993.
Escobar, A., A Simulation Study of a Mudlift Drilling System During Tripping
Operations, M.S. Thesis, Texas A&M University, College Station, Texas, 1999.
Faber, T.E., Fluid Dynamics for Physicists, Cambridge University Press, 1995.
Ferziper, J.H., Péric, M., Computational Methods for Fluid Dynamics, Springer,
Berlim, 1996.
Forrest, N., Bailey, T., and Hannegan, D., Subsea Equipment for Deep Water Drilling
using Dual Gradient Mud System, paper SPE/IADC 67707 presented at the 2001
SPE/IADC Drilling Conference, Amsterdam, 27 February - 1 March, 2001.
Fortuna, O., Técnicas Computacionais para Dinâmica dos Fluidos – Conceitos
Básicos e Aplicações, Edusp, 2000.
Gault, A., Riserless Drilling: Circumventing the Size/Cost Cycle in Deepwater,
Offshore, p. 49-54, May 1996.
He, P., Salcudean, M., Gartshore, I.S., A Numerical Simulation of Hydrocyclones,
Chemical Engineering Research and Design, 77, p. 429-441 1999.
Heiskanen, K., Particle Classification, Chapman & Hall, London, 1993.
Hirsch, C., Numerical Computation of Internal and External Flows, John Wiley &
Sons, England, vol. 1 (1989), vol. 2, 1990.
Johansen, T., Subsea Mudlift – Evaluation of the Pressure Differential Problem with
Subsea Pump, M.S. Thesis, Texas A&M University, College Station, Texas, 2000.
118
Kelsall, D. F., The theory and applications of the Hidrociclones, In Pool and Doyle
(Eds), Solid-liquid Separation, HSMO, London, 1966.
Kingdom Drilling Services Ltd, Deepwater Riserless Drilling, site:
http://www.kingdomdrilling.co.uk/drillops/openwater/ow9.pdf, 10 February, 2004.
Kolmogorov, A.N., The Equations of Turbulent Motion in a Incompressible Fluid, Isv.
Acad. Sci. USSR, Phys. 6, p. 56-58, 1942.
Lang, K.R., Basic Drilling and Well Completion Technology, IHRDC Publishers,
Boston, 1985.
Launder, B.E., Second moment closure: present and future?, Int. J. Heat and Fluid
Flow, vol. 10, No. 4, p. 282- 300, 1989.
Leahy-Dios, A. e Medronho, R.A., Estudo da Separação Água-Óleo em Hidrociclones
Através de Fluidodinâmica Computacional – Influência do ângulo da Seção Cônica,
Projeto Final de Curso, Escola de Química, UFRJ, Rio de Janeiro, 2003.
Lomax, H., Pulliam, T.H., Zingg, D.W., Fundamentals of Computacional Fluid
Dynamics, Springer, New York, 2001.
Malhotra, A., Branion, R.M.R., Hauptmann, E.G., Modelling the Flow in a
Hydrocyclone, The Canadian Journal of Chemical Engineering, 72, p. 953-960, 1994.
Maliska, C.R., Transferência de Calor e Mecânica dos Fluidos Computacional:
Fundamentos, Coordenadas Generalizadas, LTC Editora, 1995.
Matta, V.M., Medronho, R.A., A New Method for Yeast Recovery in Batch Ethanol
Fermentations: Filter Aid Filtration Followed by Separation of Yeast from Filter Aid
using Hydrocyclones, Bioseparation 9 p. 43-53, 2000.
119
Maurer, W.C., McDonald, W.J., Williams, T.E., W.and Cohen, J.H.: Development
and Testing of Underbalanced Drilling Products, Final Report, DOE Contract No. DEAC21-94MC31197, Morgantown, WV, July 2001.
Maurer Technology, Jip to Develop Hollow Spheres Dual-Gradient Drilling System,
Final Report, April 2003.
McCabe, W.L., Smith, J.C, Harriot, P., Unit Operations of Quemical Engeneering,
McGraw-Hill, 4th edition, 1985.
McDonald, W.J., Cohen, J.H., Hightower, C.M., Maurer Engineering INC., Houston,
Texas.
McLeod, W.R., A Review of Riserless Drilling Alternatives, paper SPR 5768 presented
at the 1976 Meeting of the Society of Petroleum Engineers of AIME, Amsterdam, 8-9
April 1976.
Medronho, R.A., Scale-Up of Hydrociclone at Low Feed Concentrations, Ph.D.
Thesis, University of Bradfort, United Kingdom, 1984.
Medronho e Antunes (1992)
Medronho, R.A. and Svarovsky, L., Tests to verify hydrociclone scale-up procedures,
In Proc. 2nd International Conference on Hydrociclones, BHRA, Bath, United Kingdom,
1984, pp.1-14.
Medronho, R.A. (2000), Solid-Liquid Separation, Em: Mattiason, B. e Hatti-Kaul, R.,
Isolation and Purification of Proteins, Marcel Dekker, Nova York, no prelo.
Nageswararao, K., A Generalised Model For Hydrocyclone Classifiers, AusIMM
Proc., 300, p. 21, 1995.
120
Neto, A.S., Fundamentos da Turbulência nos Fluidos, Em: Freire, A.P.S., Menut,
P.P.M., e Su, J. (eds.), Turbulência, Ediouro Gráfica e Editora S.A., Volume 1, Rio de
Janeiro, 2002.
Neto, A.S., Simulações de Grandes Escalas de Escoamentos Turbulentos, Em: Freire,
A.P.S., Menut, P.P.M., e Su, J. (eds.), Turbulência, Ediouro Gráfica e Editora S.A.,
Volume 1, Rio de Janeiro, 2002.
Orszag, S.A, Yakhot, V., Flannery, W.S., Boysan, F., Chouhury, D., Maruzewski,
J., & Patel, B., Renormalization Group Modeling and Turbulence Simulations, In: So,
R.M.C., Speziale, C.G., and Launder, B.E. (eds.), Near-Wall Turbulent Flows, Elsevier
Science Publisher, 1993.
Pinto, J.C., Lage, P.L.C., Métodos Numéricos em Problemas de Engenharia Química,
e-papers, Rio de Janeiro, 2001.
Prandlt, L., Über ein Neues Formelsystem für Die Ausgebildete Turbulenz, Nachr.
Akad. Wiss. Göttingen Math. Phys. Kl 1945, p.6-19, 1945.
Reynolds, O., On the Dynamical Theory of incompressible Viscous Fluids and the
Determination of the Criterion, Phil. Trans. Roy. Soc. London Ser. A, 186, p.123-164,
1895.
Roark and Young, Formulas for Stress and Strain, 5th edition, McGraw-Hill Book
Company, 1975.
Schlichting, H., Zur Enststehung der Turbulenz bei der Plattenstronmung. Nachr. Ges.
Wiss. Gottingen, Math-phys, K., 1, p. 123-161, 1933.
Schumacher, J.P., Dowell, J.D., Ribbeck, L.R., and Eggemeyer, L.R., Subsea
Mudlift Drilling: Planning and Preparation for the First Subsea Field Test of a FullScale Dual-Gradient Drilling System at Green Canyon 136, Gulf of Mexico, paper SPE
71358 presented at 2001 SPE Annual Technical Conference and Exhibition, New
Orleans, 30 September - 3 October 2001.
121
Speziale, C.G., Modeling of Turbulent Transport Equations, In: Gatski, T.B., Hussaini,
M.Y., Lumley, J.L. (eds.), Simulation and Modeling of Turbulent Flows, Oxford
University Press, New York, 1996.
Smith, R.C, Powers, C.A, Dobkins, T.A., A new Ultra-lightweight Cement with Super
Strenght, JPT, p. 1438, August 1980.
Smith, K.L., Gault, A.D., Witt, D.E., Botros, F.P., Peterman, C. et al, Subsea
Mudlift Drilling JIP: Achieving Dual-Gradient Technology, Deepwater Technology, p.
21, August 1999.
Smith, K.L., Weddle III, C.E., Peterman, C.P., Snyder, R.E., Dual-Gradient
Drilling Nearly Ready for Field Test, World Oil, October 2000.
Svarovsky, L., Hydrociclones, Holtm, Riñera and Winston, London, 1984.
Steppan, D.D., Werner, J., Yeater, R.P., Essential Regression and Experimental
Design for Chemists and Engineers, Copyright 1998.
Thomas, J.E. (ed.), Fundamentos de Engenharia de Petróleo, Editora Interciência, Rio
de Janeiro, 2001.
Tritton, D.J., Physical Fluid Dynamics, Oxford Science Pubs, 1988.
Trauggot, M. (Amoco E & P Technology), Pore Pressure and Fracture Pressure
Determinations in Deepwater, World Oil, August 1997.
Versteeg, H.K., Malalasekera, W., An Introduction to Computational Fluid Dynamics
– The Finite Volume Method, Longman, London, 1995.
122
ANEXO 1 – Glossário
Completação – é o conjunto de operações destinadas a equipar o poço para produzir
óleo ou gás, ou injetar fluidos no reservatório (Thomas, 2001).
CRD – Conventional Riser Drilling, ou perfuração convencional com riser.
Dowstream – engloba as atividades de refino de petróleo, transporte e comercialização
de seus derivados.
mudline – linha de lama no fundo do mar.
Offshore – alto-mar.
Reservas de petróleo – é o subconjunto dos recursos existentes de petróleo que já foram
identificados com relativa certeza, em termos de localização, dimensão e qualidade, e
cuja extração é considerada possível, dados os atuais parâmetros de preço e tecnologia.
Revestimento (casing string) – tubo de metal usado para cobrir uma parte ou todo de
um poço; coluna de revestimento a ser descida no poço que possuem diferentes
diâmetros; o número de casings é igual ao número de fases da perfuração de um poço.
Riser – tubulação concêntrica à coluna de perfuração, e responsável pelo retorno do
fluido de perfuração até a superfície na perfuração offshore.
Rochas produtoras ou rochas reservatório – Todas as rochas sedimentares com
porosidade intergranular, entre os grãos, e permeáveis. Exemplo: arenitos, calcarenitos,
folhelhos permeáveis e carbonatos permeáveis (quando fraturados).
Testemunhagem – é o processo de obtenção de uma amostra real de rocha de
subsuperfície, chamado testemunho, (...), obtém-se informações referentes à geologia,
engenharia de reservatórios, litologia, textura, porosidade, permeabilidade, etc (Thomas,
2001).
123
Upstream (E&P) – engloba as atividades de exploração, perfuração e produção de
petróleo.
124
ANEXO 2 – Malhas Utilizadas
⇒ Malha da Geometria 1, 2, 12 e 13:
⇒ Malha da Geometria 3:
125
⇒ Malha da Geometria 4:
⇒ Malha da Geometria 5:
126
⇒ Malha da Geometria 6:
⇒ Malha da Geometria 7:
127
⇒ Malha da Geometria 8:
⇒ Malha da Geometria 9:
128
⇒ Malha da Geometria 10:
129
⇒
Malha da Geometria 11:
⇒ Malha da Geometria 14:
130
⇒ Malha da Geometria 15:
⇒ Malha da Geometria 16:
131
⇒ Malha da Geometria 17:
132
⇒ Malha da Geometria 18:
⇒ Malha da Geometria Otimizada (simulações 19 a 25):
133
Baixar