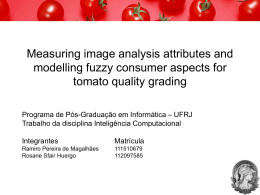
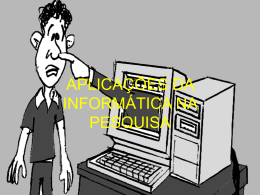
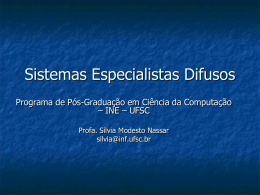
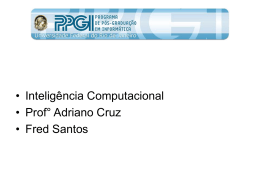
AEFUZZY - SÍNTESE OTIMIZADA DE CONTROLADORES FUZZY VIA ALGORITMOS EVOLUTIVOS Leonardo de Assis Silva∗, Edson de Paula Ferreira∗, Diego Nunes Bertolani† ∗ Universidade Federal do Espı́rito Santo - UFES - Av. Fernando Ferrari, 514 - Vitória, ES, Brasil † Instituto Federal do Espı́rito Santo - IFES - Estrada da Tartaruga, s/n - Guarapari, ES, Brasil Emails: [email protected], [email protected], [email protected] Abstract— In this paper an interface called AEFuzzy is presented, it was developed for terms and gains tuning of fuzzy controllers using evolutionary algorithms (Genetic and Differential Evolution). The strategy is based on knowledge of the PID classical structures. The results were validated using three plants with different characteristics: a fourth order system, a second order system with time delay and a third-order non-minimum phase system. Based on the tests it was possible to verify that AEFuzzy tool can tune a PID fuzzy to any controlled system. It is also possible to conclude that AEFuzzy presents skills of simplicity, generality and efficience to aid the tuning of fuzzy controllers. Keywords— Intelligent control, fuzzy systems, evolutionary algorithms, fuzzy. Resumo— Neste trabalho é apresentada uma interface, denominada AEFuzzy, desenvolvida para a sı́ntese de termos ou ganhos de controladores fuzzy, utilizando algoritmos evolutivos (Genético e Evolução Diferencial). A estratégia é baseada no conhecimento sobre as estruturas clássicas de PID. Os resultados foram validados em três plantas com diferentes caracterı́sticas: um sistema de quarta ordem, um sistema de segunda ordem com atraso e outro de terceira ordem de fase não mı́nima. Dos testes foi possı́vel confirmar que a ferramenta AEFuzzy consegue sintonizar um PID fuzzy para qualquer sistema compensado. Conclui-se também que o AEFuzzy apresenta atributos de simplicidade, generalidade e eficiência no auxı́lio a sı́ntese de controladores fuzzy. Palavras-chave— 1 Controle inteligente, sistemas nebulosos, algoritmos evolutivos, fuzzy. Introdução Os sistemas ou processos, industriais ou não, normalmente precisam ter a sua dinâmica compensada ou serem controlados para adequar-se a certas caracterı́sticas parametrizadas de desempenho, como: baixa oscilação, rapidez de resposta, precisão e robustez, tudo isso face a perturbações, ruı́dos, restrições no estado e controle, além de diversas não linearidades e incertezas. Quando o comportamento relevante pode ser descrito por modelos aproximadamente lineares, num particionamento adequado em intervalos do espaço de estados, no entorno das correspondentes condições nominais de operação, em geral, a primeira abordagem consiste na sintonia de soluções clássicas, que utilizam realimentações das variáveis de saı́da, para cada intervalo. Temos então o problema global “quebrado” em dois: o da sintonia em cada intervalo e o da transição entre intervalos no controle de “movimentos” amplos no espaço de estados. Na literatura diversos autores propõe a “fuzificação” de soluções baseadas na sı́ntese clássica, visando ampliar os intervalos de validade das soluções, além de melhorar os parâmetros de desempenho. Neste trabalho, colocamos ênfase especial no esforço de controle. Essas soluções “fuzificadas” teriam a vantagem adicional de possibilitar uma interpolação fuzzy, que garantiria uma transição “suave” no controle entre intervalos. Os maiores problemas nas soluções disponı́veis são a falta de uma sistemática consistente de sı́ntese baseada em critérios objetivos e a dificuldade de generalização. Assim, neste trabalho são apresentadas estratégias sistematizadas de sı́ntese fuzzy e uma interface adequada de auxı́lio à sı́ntese otimizada, AEFuzzy. Os populares controladores PID são simples, flexı́veis e tem, em geral, bom desempenho. Eles são objeto de modificações heurı́sticas para ampliar o seu uso em sistemas não lineares, ou com parâmetros variáveis, através da adaptação de ganhos, (Sharkawy, 2010). Entretanto, em casos onde o sistema apresenta fatores complicadores, como incertezas e não linearidades relevantes, uma das alternativas mais promissoras acaba sendo o controle inteligente, como visto em (Abeywardena et al., 2009). Nestes casos, a sintonia pode não ser trivial, assim, alguns métodos de sı́ntese e modelagem práticos e com menos complexidade, como algoritmos iterativos de busca baseados somente em uma função custo (fitness), foram desenvolvidos, como o Algoritmo Genético (Bertolani et al., 2014; Costa et al., 2010). É neste contexto, que apresentamos uma aplicação desenvolvida, denominada AEFuzzy, para a sı́ntese de ganhos e termos de controladores fuzzy, utilizando técnicas de inteligência computacional (Algoritmo Genético e Evolução Diferencial), a partir de PIDs clássicos sintonizados a priori. Além de contribuir com o desenvolvimento de sistemas fuzzy para a área de controle e modelagem de plantas, a relevância deste trabalho está em propor uma metodologia de ajuste de con- troladores fuzzy utilizando algoritmos evolutivos, obtendo resultados melhores que os compensadores clássicos, dando ainda importância ao esforço de controle, normalmente negligenciado na literatura. Este trabalho é dividido em 4 partes: a Seção 2 contextualiza o trabalho proposto, a Seção 3 explica o funcionamento completo do AEFuzzy, apresenta e justifica a estrutura fuzzy utilizada pela interface e expõe brevemente os algoritmos utilizados: Algoritmo Genético (AG) e Evolução Diferencial (ED). As implementações dos dois algoritmos e de todas as funcionalidades da ferramenta se encontram detalhadas em (Silva, 2014). A Seção 4 apresenta os resultados e as análises realizadas, sendo as conclusões expostas na Seção 5. 2 Contexto da Estratégia Proposta Em (Carli et al., 1994) é proposta uma estratégia de um sistema fuzzy embarcado para o ajuste dos parâmetros de controle, Kp e Ki, de um controlador PI, em função do erro estacionário e da derivada do erro. De forma análoga, em (Sharkawy, 2010) é apresentado um controlador PID utilizado para o controle de sistemas de freio automotivo ABS. No entanto, diferentemente do primeiro, os parâmetros, Kp, Kd e Ki, são sintonizados em tempo de execução por um sistema fuzzy-genético. Um controlador hı́brido fuzzy-não linear é proposto em (Ferreira et al., 2010) para o controle dos movimentos em marcha ré de Robôs Móveis Multiarticulados (RMMAs). Este se diferencia dos demais já citados por propor um controlador fuzzy, enquanto nos outros, a técnica fuzzy é utilizada para interpolação dos ganhos dos controladores clássicos em tempo de execução. Em (Abeywardena et al., 2009) aplica-se a lógica fuzzy como uma estratégia para estabilizar e controlar um Veı́culo Aéreo Não Tripulado (VANT), demonstrando, juntamente dos outros trabalhos citados, a grande aplicabilidade dos sistemas fuzzy, que aumentam o escopo de atuação das soluções clássicas. Sua sı́ntese pode ser realizada com o auxı́lio de algoritmos genéticos, como visto em (Bertolani et al., 2014), que propõe um software denominado A4G que utiliza o algoritmo genético para ajustar 4 ganhos que compõem o controle não linear de RMMAs. Diferentemente dos trabalhos supracitados, o artigo propõe a substituição de controladores PID de sistemas já sintonizados, por compensadores fuzzy que apresentem desempenho igual ou superior as suas versões clássicas. Neste processo, a interface permite que se realize uma ação de sı́ntese comparando diferentes soluções podendo obter, como ganho adicional, soluções melhores. 3 Software AEFuzzy Essa seção é destinada a apresentação da interface e do funcionamento da ferramenta desenvolvida AEFuzzy (Algoritmos Evolutivos para sı́ntese de controladores Fuzzy). Este programa foi implementado no MATLABr e sua interface elaborada através do pacote de ferramentas gráfico GUIDE. 3.1 Lógica fuzzy e Estrutura Utilizada A estrutura do controlador fuzzy utilizada nos testes e sintonizada pelo AEFuzzy foi baseada no trabalho apresentado em (Jantzen, 1998a; Jantzen, 1998b), em que é proposta uma sistemática de sı́ntese de controladores fuzzy baseada nos conhecimentos prévios de PIDs clássicos já sintonizados, substituindo os controladores lineares através de uma equivalência de ganhos (Kp = GE · GU , Kd = GCE · GU e Ki = GIE · GU ) e da inserção de um sistema de inferência fuzzy. A estrutura, denominada controlador inteligente, apresentada por (Jantzen, 1998a) e utilizada neste trabalho, compõe-se de um núcleo PDfuzzy somado a integral do erro (FPD+I). Esta foi reproduzida no Simulink (MATLABr) e representada na Figura 1. O núcleo fuzzy utiliza o modelo linguı́stico de Mamdani, cujo método de inferência é do tipo max − min, e para a defuzificação, emprega o método do centro de gravidade. As variáveis linguı́sticas são compostas pelo erro, a derivada do erro e a saı́da dessa inferência, com granularidade ı́mpar, sendo estes os conjuntos central, zero (ZE), e os demais, os lados positivo e negativo. A estrutura fuzzy do controlador proposto funciona como um somador simples, ou seja, representa a soma do erro com sua derivada compensados pelos seus respectivos ganhos. Por ser simples na formação da sua base de regras, este controlador apresenta uma estrutura interessante, pois possibilita a configuração do compensador de maneira intuitiva e generalizável, ao contrário da base proposta por (Jantzen, 1998b). Uma base de regras de um FPD+I com 7 conjuntos em cada variável de entrada pode ser conferida na Figura 2. 3.2 Algoritmos Evolutivos Os algoritmos evolutivos são inspirados nos mecanismos adaptativos utilizados pela natureza para a solução de problemas. O uso destas técnicas justifica-se pelo fato de que a otimização de um sistema através dos algoritmos evolutivos não exige grande conhecimento da planta, sendo ainda assim possı́vel encontrar uma solução ótima. Atualmente, é comum, encontrar aplicações e trabalhos que utilizam essa estratégia genética na otimização de processos e sintonia de controladores, como em (Bertolani et al., 2014), em Figura 1: Estrutura de controlador fuzzy FPD+I. Além disso, como as variáveis GE, GCE, GIE e GU dependem do valor dos ganhos do controlador clássico, GE pode ser variado para alterar a escala de todos os outros ganhos, sendo, então, adicionado ao indivı́duo: T GE · rand(1) individuo = . individuo Figura 2: Base de regras de um FPD+I. (Sharkawy, 2010), em (Saad et al., 2012) e em (Costa et al., 2010). Tanto o AG quanto a ED geram uma população inicial de N indivı́duos e, dentro de um certo número de gerações, aplica sobre esta população operações genéticas de crossover, mutação e seleção para gerar iterativamente a próxima geração de indivı́duos. O software AEFuzzy permite ao usuário selecionar a composição dos indivı́duos, que podem ser formados de duas maneiras diferentes: os conjuntos fuzzy ficam igualmente espaçados dentro do universo de cada variável linguı́stica e os limites variam, T limiteerro · rand(1) individuo = limitederro · rand(1) , limitesaida · rand(1) ou os limites de cada universo são fixados e os conjuntos fuzzy variam, T limiteerro · rand(1, N e) individuo = limitederro · rand(1, N de) , limitesaida · rand(1, N sa) Os termos limiteerro , limitederro e limitesaida são os valores máximos que o universo fuzzy de cada variável pode alcançar. Já os parâmetros N e, N de e N sa correspondem ao número de cromossomos de cada indivı́duo. A função rand() cria a primeira população aleatoriamente. Cada genótipo do indivı́duo (GE e limites ou conjuntos) são formados por números reais aproximados até a segunda casa decimal para que os resultados pudessem ser reconstruı́dos posteriormente. Algumas particularidades do problema são utilizadas para diminuir a dimensão do espaço de busca, caso contrário, o problema de otimização seria de grande porte. Neste sentido, as contribuições deste trabalho são as seguintes: • como o sistema se comporta de forma análoga para valores negativos e positivos do erro e de sua derivada, o número de termos a serem sintonizados pode ser reduzido pela metade; • visto que os conjuntos fuzzy devem ter crossover 0.5, dado que uma regra deve na soma de todas as possibilidades ter peso 100% (µx = µconjunto1 +µconjunto2 = 0.5+0.5 = 1), podese sintonizar apenas os picos de cada conjunto; • finalmente, para que os conjuntos sejam simétricos em relação à origem, o conjunto zero, deve ter seu pico na origem, reduzindo o tamanho do indivı́duo em 1. Desta forma, para o caso de conjuntos vari. ando, os indivı́duos de cada variável se resumem apenas ao ganho GE e aos picos dos conjuntos positivos. A avaliação da aptidão de cada indivı́duo é chamada de fitness e é calculada a partir da soma do erro quadrático entre a resposta ao degrau do sistema compensado pelos controladores fuzzy e clássico, como apresentado na Equação 1. f itness = P 1 |yf uzzy − yclássico |2 (1) Figura 3: Interface gráfica da ferramenta desenvolvida, AEFuzzy. 3.3 A Interface Gráfica A interface gráfica do AEFuzzy pode ser conferida na Figura 3. No topo da interface, o usuário pode escolher entre duas opções de algoritmos evolutivos: AGFuzzy e EDFuzzy, que correspondem, respectivamente, ao Algoritmo Genético e ao algoritmo de Evolução Diferencial. Na região “Parâmetros”, coloca-se o numerador e o denominador da função de transferência de malha aberta da planta, os parâmetros do controlador PID clássico a ser copiado, os parâmetros dos algoritmos evolutivos, como: taxa de crossover, taxa de mutação, taxa de exclusão (exclusiva do AG), e elitismo. Além disso, o AEFuzzy possibilita ao usuário configurar os parâmetros fuzzy do sistema: número de variáveis linguı́sticas, o valor do ganho GE e dos limites fuzzy. Caso a opção seja pela variação de GE e/ou dos limites, os valores configurados previamente valerão, então, como os limites de variação desses parâmetros. O programa também possibilita a escolha do tempo de simulação. Este parâmetro está ligado diretamente à dinâmica do sistema compensado. Isto é, caso exista algum comportamento que se deseja copiar para o controlador fuzzy, como por exemplo, variações de transitório que ocorram até 2 segundos de simulação, então, neste campo deve ser colocado pelo menos 2 segundos, para que a curva da resposta ao degrau do sistema englobe essa dinâmica. Além disso, o programa também adiciona ao sistema uma perturbação que ocorre na metade do tempo de simulação, para que o controlador não só seja capaz de permitir que o sistema responda como o compensado pelo controlador clássico no regime transitório, como também no regime regulatório. 4 Resultados e Discussões Os resultados foram obtidos a partir de três plantas com diferentes caracterı́sticas: uma de quarta ordem, uma de segunda ordem com atraso e outra de terceira ordem de fase não mı́nima, vide Equações 2, 3 e 4 respectivamente. Mesmo que os testes tenham sido realizados unicamente em simulação, pelas caracterı́sticas dos sistemas apresentados abrangerem situações recorrentes em plantas reais, as soluções obtidas se mostram válidas e comprovam sua aplicabilidade prática. G1 (s) = G2 (s) = 1500 s4 + 40.67s3 + 401.67s2 + 250s (2) 10e−1s 10 − 5s = 3 (1 + 8s)(1 + 2s) 8s + 21s2 + 10.5s + 1 (3) G3 (s) = 1 − 10s 1 − 10s = 3 (1 + s)3 s + 3s2 + 3s + 1 (4) A Equação 2 mostra uma planta com 4 polos sendo um na origem, caracterı́sticas essas representativas de situações reais. O controlador clássico sintonizado para esta planta G1 está mostrado na Equação 5. As funções de transferência de malha aberta apresentadas nas Equações 3 e 4 foram retiradas de (Saad et al., 2012), e seus controladores PID podem ser conferidos, respectivamente, nas Equações 6 e 7. C1 (s) = 1.08s2 + 0.95s + 0.07 s (5) C2 (s) = 1.34s2 + 0.68s + 0.07 s (6) C3 (s) = 0.11s2 + 0.19s + 0.07 s (7) A planta G2 , apresentada na Equação 3, possui um atraso que é substituı́do por uma aproximação de Padé de primeira ordem. Na prática, atrasos são corriqueiros e podem tornar complexa até a questão da estabilidade. A planta G3 , representada na Equação 4, tem um zero real positivo, constituindo um sistema de fase não mı́nima. Em malha fechada, gera um caminho de ganho positivo para um dos polos até o lado instável do eixo real. Mesmo com os devidos cuidados para que o sistema seja estável, a dinâmica desta planta realimentada possui uma resposta inversa inicialmente que aumenta o erro à entrada, exigindo mais esforço do controlador. As três plantas e seus devidos controladores foram testados pelo AEFuzzy. Os parâmetros de configuração dos algoritmos AG e ED e do sistema fuzzy para as três plantas podem ser conferidos nas Tabelas 1 e 2. Os testes ocorreram tanto para o caso de limites fixos quanto para variáveis. Além disso, o ganho GE foi configurado para fazer parte do indivı́duo, indo de 0.01, para que os ganhos não tenham valor nulo, a 12. Os tempos de simulação de G1 , G2 e G3 foram de 3.5, 25 e 70 s, respectivamente. Figura 4: Variável linguı́stica erro para planta G1 com limites fixos usando AG. A resposta ao degrau unitário do melhor indivı́duo encontrado para planta G3 , com limites fixos usando ED, pode ser conferida na Figura 5 juntamente da curva referência a ser copiada. Nota-se que as diferenças são desprezı́veis. 2.5 Referência ED − Limites fixos 2 AG ED Tamanho população Taxa de cruzamento Taxa de mutação Taxa de exclusão Número de gerações Elitista 100 0.9 0.02 0.05 100 Sim 100 0.9 0.6 100 Sim Amplitude 1.5 Parâmetro 1 0.5 0 −0.5 −1 −1.5 0 10 20 30 40 50 60 70 Tempo (s) Fixos Variáveis conjuntos Erro mı́n Erro máx dErro mı́n dErro máx Saı́da mı́n Saı́da máx GE mı́n GE máx 5 -100 100 -200 200 -300 300 0.01 12 5 -150 150 -250 250 -400 400 0.01 12 12 Referência ED − Limites fixos 10 Referência ED − Limites fixos 2 1 8 0 Amplitude Limites No Figura 5: Resposta ao degrau unitário para a planta G3 com limites fixos usando ED. Amplitude Tabela 1: Configuração dos parâmetros dos algoritmos AG e ED 6 4 −1 −2 −3 2 −4 Tabela 2: Configuração dos parâmetros fuzzy. Vale ressaltar que todos os resultados mostraram exito na cópia do compensador clássico, vide Tabela 3. Posto isso, a Figura 4 apresenta a variável linguı́stica erro do melhor indivı́duo encontrado para o caso de limites fixos utilizando AG. Nota-se que os conjuntos N M e N P , e P P e P M se agrupam, gerando o equivalente a uma variável de somente 3 conjuntos fuzzy. É notória a vantagem na diminuição do processamento, que ao invés de ter que computar 25 regras, processará apenas 15, mostrando a contribuição da utilização do AEFuzzy para a obtenção de modelos mı́nimos. 0 −2 0 −5 0.005 0.01 0.015 0.02 0.025 0.03 −6 35 35.01 35.02 35.03 Tempo (s) Tempo (s) (a) Transitório. (b) Pertubação. Figura 6: Detalhes do esforço de controle para a planta G3 com limites fixos usando ED. Os detalhes do esforço de controle para o transitório e para pertubação no instante t = 35 s são apresentados na Figura 6. Nota-se que na Figura 6a o esforço de controle no transitório do sistema com compensador fuzzy foi maior no intervalo [0.0055; 0.0205] segundos, 35.04 que o da resposta para o compensador clássico, entretanto, o esforço manteve-se em um intervalo fixo de −6.46 a 6.46 tanto no transitório quanto no momento de pertubação, Figura 6b. É comum considerar o esforço de controle no cálculo da fitness para penalizar o indivı́duo. Desse modo, a partir dos resultados encontrados com o AEFuzzy, o usuário pode de forma intuitiva estreitar o universo de busca, para eliminar respostas que apresentem esforço de controle fora da faixa de saturação. Vale ressaltar que, geralmente, os sistemas compensados com controladores clássicos possuem maior esforço de controle ante os compensados com controladores FPD+I, Tabela 4. Esta vantagem dos sistemas fuzzy contribuem para seu uso em substituição aos sistemas clássicos. AG ED Limites Fixos Variáveis Fixos Variáveis G1 G2 G3 96.55% 97.06% 89.27% 92.12% 90.95% 92.54% 96.65% 97.00% 99.24% 97.61% 97.23% 93.08% Tabela 3: Fitness normalizada de cada sistema testado. Ref. AG ED Limites - Fixos Variáveis Fixos Variáveis G1 G2 G3 108.95 134.68 11.19 92.72 47.31 10.61 71.49 92.34 14.45 37.84 61.85 6.46 100.17 137.70 15.91 Tabela 4: Máximo valor absoluto do esforço de controle. A Tabela 3 apresenta um cálculo de fitness normalizada calculada como segue, na Equação 8, sendo norm() a norma 2, y a resposta obtida pelo sistema com FPD+I, ref a resposta obtida pela referência e m(ref ) sua média. norm(y − ref ) f itness(%) = 100 − 100 · (8) norm(ref − m(ref )) 5 Conclusões Na Tabela 4 é possı́vel notar que o esforço de controle máximo absoluto dos resultados obtidos normalmente são menores que o gerado pelos controladores clássicos. Além disso, o algoritmo ED encontrou o melhor indivı́duo de cada planta, sendo possı́vel obter respostas aceitáveis em distintas abordagens na formulação da sı́ntese fuzzy otimizando termos ou limites de intervalos, Tabela 3. Tendo em vista os resultados apresentados, podemos concluir que, de fato, a interface e a estratégia propostas proporcionam as seguintes vantagens: as soluções são simples e generalizáveis, podem ser customizadas e tem sua aplicabilidade demonstrada para uma ampla gama de dinâmicas. O AEFuzzy também possibilita o ajuste adequado num domı́nio ou intervalo de interesse, copiando soluções clássicas nesse intervalo e, como ganho adicional, possibilitando uma melhora na solução, contribuindo no processo de sı́ntese. Também permite melhorias na modelagem do controlador se a ferramenta encontrar soluções que explicitem possı́vel redução de ordem do modelo. Considerações adicionais, como a análise dos algoritmos sem elitismo, são objeto para trabalhos futuros. Referências Abeywardena, D., Amaratunga, L., Shakoor, S. and Munasinghe, S. (2009). A velocity feedback Fuzzy Logic controller for stable hovering of a quad rotor UAV, Fourth International Conference on Industrial and Information Systems, ICIIS . Bertolani, D., Ferreira, E. and Silva, L. (2014). Otimização Genética Assistida no Controle de Configuração de Robôs Móveis Multiarticulados, XX Congresso Brasileiro de Automática . Carli, A., Liguori, P. and Marroni, A. (1994). A Fuzzy-PI Control Strategy, Control Engineering Practice . Costa, W., Fardin, J., Simonetti, D. and Neto, L. (2010). Identification of photovoltaic model parameters by differential evolution, IEEE International Conference on Industrial Technology - ICIT . Ferreira, E., Pandolfi, F. and Reinan, T. (2010). Modelagem e Controle Fuzzy a Horizonte Fixo de Robôs Móveis Articulados: Caso Real de 3 Graus de Liberdade e 343 Regras, IX Induscon : 9th IEEE/IAS International Conference on Industry Applications . Jantzen, J. (1998a). Design of fuzzy controllers, Technical report, Department of Automation, Technical University of Denmark. Jantzen, J. (1998b). Tuning of fuzzy pid controllers, Technical report, Department of Automation, Technical University of Denmark. Saad, M., Jamaluddin, H. and Darus, I. (2012). PID controller tuning using evolutionary algorithms, WSEAS Transactions on Systems and Control . Sharkawy, A. (2010). Genetic Fuzzy self-tuning PID controllers for Antilock Braking Systems, Engineering Applications of Artificial Intelligence . Silva, L. (2014). Pid inteligente: Sı́ntese otimizada de controladores fuzzy via algoritmos evolutivos.
Baixar