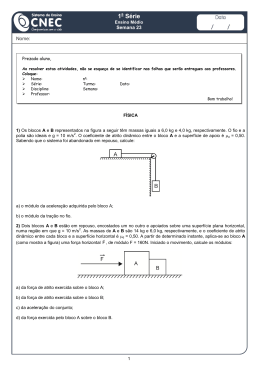
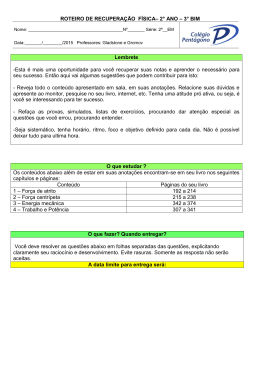
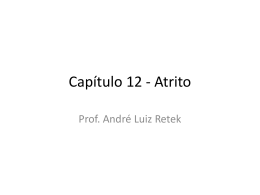
X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil ESTIMAÇÃO E COMPENSAÇÃO DE ATRITOS EM UM PÊNDULO INVERTIDO Hugo Tanzarella Teixeira∗, Victor Semedo de Mattos Siqueira∗, Celso José Munaro∗ Departamento de Engenharia Elétrica Universidade Federal do Espı́rito Santo Av. Fernando Ferrari, 514, Goiabeiras, CEP 29075-910 Vitória, Espı́rito Santo, Brasil ∗ Emails: [email protected], [email protected], [email protected] Abstract— The inverted pendulum contains non-negligible nonlinearities due to friction, causing limit cycles. Much research has been conducted in the literature to estimate and compensate for this friction. In this paper, a recently proposed method is applied to estimate friction using only data from the closed loop operation. Estimations from open-loop and closed-loop are compared, showing the similarity of both. Friction estimates are then used for compensation using two methods of the literature to improve the performance of the controller in closed loop. The constant reinforcement (CR) compensator resulted in a better performance than the compensator using the Karnopp friction model. Moreover, the information required to make the compensation in the first method is only the estimate of the friction that can be obtained in closed loop. Applied techniques are illustrated through their application in a real inverted pendulum. Keywords— Inverted pendulum, friction estimation, friction compensation. Resumo— O pêndulo invertido contém não linearidades não desprezı́veis devido aos atritos, causando ciclos limite. Muita pesquisa tem sido realizada na literatura para estimar e compensar este atrito. Neste artigo, um método recentemente proposto é aplicado para estimação de atrito usando apenas dados de operação em malha fechada. A estimativa é comparada com o resultado de ensaios em malha aberta, evidenciando a semelhança de ambos. Os atritos estimados são então utilizados para sua compensação utilizando dois métodos da literatura, de forma a melhorar o desempenho do controlador em malha fechada. O compensador reforço constante (CR) resultou em um desempenho melhor do que o compensador usando o modelo de atrito de Karnopp. Além disto, a informação necessária para a fazer a compensação no primeiro método é apenas a estimativa de atrito que pode ser obtida em malha fechada. As técnicas utilizadas são ilustradas através da aplicação em um pêndulo invertido real. Palavras-chave— 1 Pêndulo invertido, estimação de atritos, compensação de atritos. Introdução O interesse no estudo dos efeitos do atrito em malhas de controle é devido ao mesmo estar presente em todos os sistemas de controle envolvendo sistemas mecânicos. Por se tratar de um sistema mecânico subatuado, inerentemente instável em malha aberta e de dinâmica não linear, o pêndulo invertido é um problema clássico e já bastante estudado para aplicações de técnicas de controle. A presença de atrito produz ciclos limite que podem impedir sua estabilização caso compensações adequadas não sejam utilizadas (Olsson and Åström, 2001). Há muitos ramos de pesquisa sobre o atrito, tais como modelagem, estimação e compensação. Esses estudos têm um propósito comum, que é mostrar qual modelo é mais apropriado para representar e compensar o atrito para cada caso. Park et al. (2006) propõe um observador não linear de ordem reduzida para estimar o coeficiente de atrito do modelo clássico de Coulomb e compensar o atrito em um pêndulo invertido. Gäfvert (1999) compara os resultados da compensação entre o modelo de LuGre e modelos clássicos de atrito em um pêndulo invertido Furuta. Fang et al. (2001) utiliza um compensador baseado no modelo de Dahl para fazer a compensação dos atritos em um pêndulo invertido duplo. Em todos ISSN: 2175-8905 - Vol. X esses casos os modelos requerem informações de vários parâmetros que devem ser estimados através de ensaios em malha aberta. Como alternativa, métodos baseados no ajuste de uma elipse aos dados de um gráfico entrada-saı́da têm sido utilizados para estimar o atrito estático quando este causa ciclos limite (Choudhury et al., 2006). Neste artigo é comparado a estimativa do atritos em malha aberta e fechada. Os atritos estimados são utilizados para sua compensação utilizando o compensador reforço constante e o compensador baseado no modelo de Karnopp. O desempenho dos compensadores é comparado através do cálculo do IAE e da variância do ângulo da haste e da posição do carrinho. As técnicas utilizadas são ilustradas através da aplicação em um pêndulo invertido real. 2 2.1 Quantificação de atritos em malha aberta Descrição do ambiente O sistema experimental utilizado, produzido pela QuanserTM , consiste em um carrinho com uma haste móvel acoplada através de uma articulação. O carrinho move-se horizontalmente em um trilho e a haste móvel por sua vez pode realizar movimento rotacional de 360◦ no plano vertical. O 332 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil carrinho consiste de uma base de alumı́nio impulsionada por um motor CC de 400 W, trifásico sem escova. O sistema fı́sico está interligado a um ambiente de controle em tempo real (QuaRC) integrado ao MatlabTM /SimulinkTM que permite seu controle e monitoramento. Uma biblioteca de funções permite a interface entre as variáveis do ambiente Simulink e o sistema real. 2.2 Modelo do pêndulo invertido Pelo método de Newton-Euler obtemos as equações que descrevem a dinâmica do sistema do pêndulo invertido (M + m)ẍ = Fe − mL sen(θ)θ2 + mL cos(θ)θ̈ − Fat 2 (J + mL )θ̈ = mLg sen(θ) + mL cos(θ)ẍ − fat (1) (2) onde M é a massa do carrinho, m a massa da haste, a distância do pivô da haste até seu centro de gravidade, J o momento de inércia da haste, Fe a força aplicada ao carrinho, Fat a força de atrito no carrinho, fat o atrito resistente ao momento de rotação da haste, x é a posição do carrinho e θ a posição angular da haste. Em nosso sistema a força aplicada ao carrinho é dada pela seguinte relação L onde β é a constante de conversão entre a corrente aplicada (i) e a força que atua no motor CC utilizado. Os valores, fornecidos pelo fabricante, dos parâmetros destas equações estão listados na Tabela 1. Modelo de atrito Segundo Olsson et al. (1998) os modelos de atrito podem ser classificados como estáticos ou dinâmicos. Nos modelos estáticos de atrito três componentes são geralmente consideradas: atrito estático, atrito viscoso e o atrito de Coulomb. Olsson et al. (1998) propuseram o modelo de atrito Fat = Fatrito (ẋ) Fe Fs sgn(Fe ) se se se ẋ 6= 0 ẋ = 0 ẋ = 0 e e |Fe | < Fs |Fe | > Fs Tabela 1: Parâmetros Parâmetro Valor Unidades M 3,2200 kg m 0,2300 kg L 0,6413 m (4) (5) onde Fs é a força de atrito estático, Fc a força de atrito de Coulomb, ε o coeficiente de atrito viscoso e vs a velocidade de Stribeck. Ao utilizar os modelos clássicos em simuladores nos deparamos com o problema de detecção da velocidade nula. Portanto Karnopp (1985) propôs a criação de uma faixa de valores, dentro da qual a velocidade do movimento é considerada nula. O modelo define a velocidade zero no intervalo |ẋ| < DV . Para velocidades dentro deste intervalo, o estado interno do sistema (velocidade) pode mudar e ser diferente de zero, mas a saı́da do bloco é mantida em zero por uma zona morta. Em nossos experimentos foi utilizado DV = 0,002 m/s. No pêndulo invertido em estudo foi observado que não há simetria na força de atrito em relação ao sinal de corrente aplicada (Figura 1).Este fato foi incorporado ao modelo de Karnopp através das equações Fat − (ẋ) Fatrito − Fs sgn(Fe ) = Fe Fs+ sgn(Fe ) F+ atrito (ẋ) se se se se se ẋ ≤ −DV |ẋ| < DV |ẋ| < DV |ẋ| < DV e e e Fe ≤ −Fs− Fs− < Fe < Fs+ Fe ≥ Fs+ ẋ ≥ DV − − − + + + Fatrito (ẋ) = Fc sgn(ẋ) + ε ẋ Fatrito (ẋ) = Fc sgn(ẋ) + ε ẋ (6) (7) (8) O efeito Stribeck, incorporado na equação (5), só é relevante para velocidades próximas de zero. Quando ẋ >> vs o termo exponencial tende a zero, resultando nas equações (7) e (8) 2.4 Estimação dos coeficientes de atrito Para obter os coeficientes de atrito do modelo de Karnopp apresentado foi realizado um experimento em malha aberta em que o pêndulo é posto na posição de equilı́brio estável e o motor é excitado com uma rampa de corrente em ambos os sentidos (Figura 1) de modo que a força aplicada ao carrinho crescesse lentamente. Teste similar foi realizado em (Campbell et al., 2008), no entanto neste artigo é utilizado um algoritmo de otimização não linear no MatlabTM (função fmincon do toolbox de otimização), que minimiza a função e = ||x(t) − x̂(t)| | (9) com as restrições Fs ≥ Fc 2 J 0,0079 kg.m g 9,8100 m/s2 β 32,3960 N/A ISSN: 2175-8905 - Vol. X 2 − ẋ Fatrito (ẋ) = Fc + (Fs − Fc ) e vs sgn(ẋ) + εẋ (3) Fe = βi 2.3 sendo o atrito total obtido pela equação Fc ≥ 0 onde x(t) (10) ε≥0 é a posição do carrinho obtida expe- 333 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil 3.1 Controle via realimentação de estados O modelo linearizado do pêndulo invertido é obtido considerando uma zona de operação próxima ao ponto de equilı́brio instável, a saber, (θ, θ̇) = (0, 0). Nessa zona valem as seguintes aproximações: sen(θ) ≈ θ, cos(θ) ≈ 1 e θ̇2 .θ ≈ 0. Com isso, a partir das equações (1) e (2) e fazendo fat ≈ 0 e u = Fe − Fat é obtida a representação do sistema no espaço de estados 1 0 0 0 0 0 m2 L2 g J+mL v2 0 1 x + 0 0 u Figura 1: Resposta à rampa de corrente rimentalmente e x̂(t) é o valor da posição obtida através de (1)-(3) e (6)-(8). O algoritmo conclui a busca dos coeficientes de atrito quando a norma do erro atinge valor menor que 10−8 . 2.4.1 Resultados Foram realizados 40 testes em que o carrinho foi submetido à rampa de corrente em cada uma das direções. Para cada teste foram estimados os coeficientes de atrito para o modelo de Karnopp. Na Tabela 2 é apresentada a média (M) e o desvio padrão (σ) dos valores identificados. Observa-se a proximidade entre Fs e Fc e estes são cerca de 80% maior para corrente negativa. 3 Quantificação de atritos em malha fechada A necessidade de testes invasivos em malha aberta, restringe o uso do método apresentado na seção 2. Em sistemas mecânicos é usual que a força de atrito se manifeste como uma degradação crescente com seu uso, o que tornaria necessário sua parada para ensaios e a consequente medição. Nesta seção é apresentado um método recentemente proposto para medição de atrito em válvulas pneumáticas de controle, que usa apenas o sinal do controlador e a resposta do processo para estimar as forças de atrito (Choudhury et al., 2006). Como o método é aplicado ao pêndulo em malha fechada, um controlador via realimentação de estados é inicialmente projetado para estabilizá-lo 0 0 ẋ = 0 0 1 y = 0 onde Corrente negativa Corrente positiva M σ M σ Fs 9,6147 0,7162 5,3713 0,4998 Fc 8,5711 0,6087 4,8104 0,2437 ε 25,5731 1,6234 30,2838 1,3633 ISSN: 2175-8905 - Vol. X mLgv1 h 0 0 0 0 1 0 0 v2 mL M +m v1 (11) (12) x iT , v1 = (M + m)/[(M + m)J + e v2 = (J + mL2 )/[(M + m)J + M mL] O controle por realimentação de estados foi projetado de forma a assegurar que a resposta em malha fechada tenha baixo tempo de resposta e elevado amortecimento, sendo a lei de controle dada por x= x θ ẋ θ̇ M mL] u = −Kx (13) onde K = [−220, 23 514, 11 − 169, 67 106, 34]. Este controlador resulta nos pólos de malha fechada: [−3, 8 − 0, 8717i − 3, 8 + 0, 8717i − 10 − 10]. O controlador obtido será utilizado em todos os testes apresentados neste artigo. A resposta do pêndulo real a este controlador pode ser vista na Figura 2, com o tempo de amostragem de 0,5 ms. Observa-se que o pêndulo opera em torno de θ = 0, mas não estabiliza devido às forças de atrito presentes no mesmo. Também fica claro que enquanto a força aplicada ao carrinho é menor que o atrito estático, a haste cai livremente, como por exemplo entre 34,0 s e 34,8 s. A queda da haste é acompanhada do aumento do sinal de erro e conseqüentemente da força aplicada. No momento em que a força aplicada vence o atrito estático o carrinho salta abruptamente fazendo que o ângulo supere o ângulo nulo desejado e dessa forma, o sinal do erro é alterado revertendo a força aplicada ao carrinho ocasionando uma nova parada. A haste entra em queda livre novamente e o ciclo recomeça. 3.2 Tabela 2: Coeficientes de Atrito 0 Estimação de atrito estático em malha fechada A presença de atrito em processos sob certas condições produz ciclos limite (Olsson and Åström, 2001) que tem sido explorados na literatura para realizar uma estimativa dos atritos em válvulas de controle (Choudhury et al., 2006). Estes métodos são agora aplicados ao pêndulo, tendo em vista o comportamento oscilatório em malha 334 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil fechada (Figura 2). De modo particular, o gráfico i versus x obtido (Figura 3), é tı́pico de sistemas sob influência de atrito estático e que apresentam oscilações e evidencia o comportamento da posição do carrinho de acordo com a corrente aplicada. Dessa forma, é possı́vel obter uma estimativa do atrito através do algoritmo proposto, baseado em (Choudhury et al., 2006), que pode ser executado periodicamente, de forma automática, usando dados coletados que indicaram presença de oscilações (Thornhill et al., 2003). 1. Aplicar ao conjunto de dados (i, x) a um filtro passa baixa a fim de eliminar componentes de alta frequência e gerar (if , xf ) 2. Escolher um segmento de dados (if , xf ) com base na regularidade de oscilações desses sinais. Tal regularidade é verificada a partir do critério apresentado em (Thornhill et al., 2003). 3. Ajustar uma elipse ao gráfico if versus xf . 4. Traçar um segmento de reta paralelo ao eixo i passando pelo centro da elipse. 5. Calcular a distância entre os interceptos do segmento de reta traçado com a reta i = 0 e com a elipse. No item 3 o ajuste da elipse ao gráfico if versus xf é feito por mı́nimos quadrados não-linear, otimizando o quadrado da soma das distâncias ortogonais dos pontos do conjunto de dados (i, x) à elipse ajustada, onde a estimativa inicial é obtida por uma rotina de mı́nimos quadrados linear. Em (Choudhury et al., 2006) o gráfico dos dados do processo formam um padrão elı́ptico, no caso do pêndulo invertido isso não ocorre, como visto na Figura 3. Para evitar que a elipse seja mal ajustada é proposto em (Cuadros et al., 2010) ajustar a elipse somente aos pontos mais significativos do conjunto de dados (SIPO). Sendo os pontos significativos definidos como os pontos onde o sistema está em um estado transitório. Para o pêndulo invertido, esses pontos ocorrem quando o carrinho está em movimento. A Figura 3 exemplifica o Figura 2: Teste com realimentação de estados ISSN: 2175-8905 - Vol. X Figura 3: Elipse mal ajustada caso, para a elipse ajustada para todos os pontos, o atrito estimado seria superior ao estimado com a elipse ajustada somente com os pontos significativos. O algoritmo como foi proposto quantifica o atrito de Coulomb. Para quantificar o atrito estático é necessário acrescentar ao algoritmo as etapas: 6. Expandir a elipse ajustada, até que ela contenha todos os pontos do gráfico if versus xf . 7. Calcular a distância entre os interceptos do segmento de reta traçado com a reta i = 0 e com a elipse expandida. Uma discussão mais profunda sobre o assunto é feita em (Teixeira et al., 2011). O resultado obtido pode ser visto na Figura 4. Fica claro que o ajuste da elipse faz com que os atritos sejam superestimados, por isso os valores aqui encontrados, listados na Tabela 3, são superiores aos encontrados na seção 2.4. Esse efeito é ainda mais grave para o caso do atrito estático. 4 Compensação de atritos Uma vez quantificados os atritos, eles podem ser eventualmente reduzidos através de manutenção. Quando isto não for possı́vel por algum motivo, Figura 4: Elipse ajustada ao gráfico i - x 335 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil Tabela 3: Correntes obtidas em malha fechada Corrente negativa Corrente positiva M σ M σ Fs 13,79 0,33 10,23 0,58 Fc 10,63 0,28 7,07 0,55 Figura 6: Teste com compensador CR de controle. Este método é similar à compensação de banda morta discutida em (Hägglund, 2007). Dessa forma, um sistema utilizando um compensador CR possui a lei de controle Figura 5: Teste com compensador de Karnopp um compensador pode ser projetado para reduzir seu efeito no desempenho da malha de controle. Dois importantes métodos da literatura são analisados, testados e comparados na próxima seção. u = uc + ui (14) ui = γ sgn(∆uc ) (15) onde ∆uc = uc (t) − uc (t − 1) e γ é o atrito estático estimado e no caso do pêndulo invertido será dado por γ = I+ s I− s 4.1 Compensação através do modelo de Karnopp Tendo obtido os coeficientes de atrito na seção 2, podemos então utilizar o modelo de Karnopp para compensar o efeito do atrito no sistema do pêndulo invertido em malha fechada. Tal técnica consiste em utilizar o modelo de Karnopp para estimar a força de atrito no sistema e somá-la ao sinal de controle a fim de cancelar o efeito do atrito. O resultado experimental pode ser visto na Figura 5. Em uma breve análise, nota-se que em 10,2 s o ângulo da haste (θ) cruza o zero e torna-se negativo, com isso o sinal de controle (u), começa a aumentar para fazer com que a haste retorne a zero graus, causando diminuição no módulo da velocidade do carrinho (ẋ). Em 10,3 s a velocidade do carrinho está entre o intervalo |x̂| < DV , e portanto o compensador de Karnopp soma à saı́da do controlador a corrente necessária para que o carrinho vença o atrito estático (F̂at ), fazendo que o carrinho movase para o lado oposto, aumentando o ângulo da haste. Enquanto o carrinho está em movimento, o compensador soma à saı́da do controlador a corrente necessária para vencer o atrito de Coulomb e o viscoso. 4.2 if if ∆uc > 0 ∆uc < 0 (16) onde Is = Fs /β, sendo Fs− e Fs+ obtidos na seção 3.2 e listados na Tabela 3. Devido aos ruı́dos de medição nos estados há a necessidade de filtrar o sinal do controlador. Inúmeras tentativas de projetar um filtro que reduzisse o efeito do ruı́do mas não introduzisse atrasos significativos foram feitas. Nos melhores resultados a compensação era feita no momento em que o sinal de controle cruzava por zero, devido a este atraso. Baseando-se nisso, propõe-se utilizar sgn(uc ) e não sgn(∆ucf ) em (15), dispensando a etapa de projeto do filtro e obtendo-se resultados equivalentes. É importante destacar que tal medida, fará com que mesmo que o sinal de controle permaneça constante, o compensador continuará atuando. No entanto, caso isso ocorra a realimentação de estados reduz este valor convenientemente. O resultado desta estratégia pode ser vista na Figura 6. Podemos observar que em 10,3 s a saı́da do controlador (uc ) torna-se negativa fazendo com que o compensador CR (ui ) subtraia I − do sinal do controlador para que o carrinho vença o atrito estático. Em 10,37 s aproximadamente a saı́da do controlador cruza novamente por zero, ficando agora positivo, portanto o compensador soma I + ao sinal do controlador. Compensador CR Ivan and Lakshminarayanan (2009) propuseram um método, chamado reforço constante (CR), para compensação de atrito estático em válvulas ISSN: 2175-8905 - Vol. X 4.3 Comparação dos métodos Observa-se que os compensadores CR e usando o modelo de Karnopp produziram resultados se- 336 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil Tabela 4: Índices de desempenho dos compensadores Posição Ângulo IAE Variância IAE Variância Sem 3,574 0,203 262,269 786,667 Karnopp 1,748 0,039 15,175 3,168 CR 1,201 0,018 8,226 0,877 melhantes, com amplitude de oscilação do ângulo em torno de 0, 3o , enquanto que sem compensação foi obtido uma amplitude de oscilação do ângulo de 1o . Tal melhoria é relevante devido ao crescente número de aplicações com o posicionamento de precisão em sistemas mecânicos. A Tabela 4 sumariza os resultados obtidos com os diferentes compensadores. Da análise das figuras 5 e 6, com o mesmo intervalo de tempo, observa-se que os sinais de compensação têm amplitudes similares. Porém, como o compensador CR alterna este sinal nos cruzamentos por zero do sinal do controle (uc ) e o compensador usando o modelo de Karnopp o fez no cruzamento pela zona morta (|ẋ ≤ DV |) da velocidade, o primeiro reage mais rapidamente limitando a amplitude de oscilação do ângulo. Além disto, o compensador CR usa apenas a estimativa de Fs em malha fechada, enquanto que o compensador utilizando o modelo de Karnopp necessita de testes em malha aberta para estimar os valores de Fs , Fc e ε, e sua implementação é mais complexa. 5 Conclusões Métodos de estimação e compensação de atritos foram aplicados em um pêndulo invertido. Através de testes realizados em malha aberta foram obtidos os parâmetros do modelo de atrito de Karnopp. Estimativas de atrito estático também foram obtidas em malha fechada, usando apenas dados de operação, produzindo valores semelhantes aos obtidos em malha aberta. O compensador CR teve desempenho superior ao do compensador utilizando o modelo de Karnopp. Concluiu-se que embora o modelo de Karnopp seja mais completo, a estratégia usando o compensador CR é mais eficiente, por agir mais rapidamente a sinais de erro. Além disto, o compensador CR requer apenas um parâmetro, o qual pode ser determinado em malha fechada. Em sistemas mecânicos que apresentam ciclos limite devido ao atrito, sua quantificação e compensação podem ser feitas de forma automática. Agradecimentos Os autores agradecem ao CNPq e a FAPES pelo apoio aos programas de pós-graduação e iniciação cientifica. ISSN: 2175-8905 - Vol. X Referências Campbell, S. A., Crawford, S. and Morris, K. (2008). Friction and the inverted pendulum, Journal of Dynamic Systems, Measurement and Control 130: 54502 – 54509. Choudhury, M. A. A. S., Shah, S. L., Thornhill, N. F. and Shook, D. S. (2006). Automatic detection and quantification of stiction in control valves, Control Engineering Practice 14: 1395 – 1412. Cuadros, A. S. L., Munaro, C. J. and Munareto, S. (2010). An improved algorithm for automatic quantification of valve stiction in flow control loops, IEEE International Conference on Industrial Technology Anais do IEEE-ICIT 2010: 135 – 140. Fang, L., Chen, W. J. and Cheang, S. U. (2001). Friction compensation for a double inverted pendulum, IEEE International Conference on Control Applications 5(7): 908 – 913. Gäfvert, M. (1999). Dynamic model based friction compensation on the furuta pendulum, IEEE International Conference on Control Applications 22(27): 1260 – 1265. Hägglund, T. (2007). Automatic on-line estimation of backlash in control loops, Journal of Process Control 17: 489 – 499. Ivan, L. Z. X. and Lakshminarayanan, S. (2009). A new approach to valve stiction quantification and compensation, Industrial & Engineering Chemistry Research 48: 3474 – 3483. Karnopp, D. (1985). Computer simulation of stick-slip friction in mechanical dynamic systems, Journal of Dynamic Systems, Measurement and Control 107(1): 100 – 103. Olsson, H. and Åström, K. J. (2001). Friction generated limit cycles, IEEE Trans. Contr. Syst. Technol 9(4): 629 – 636. Olsson, H., Åström, K. J., de Wit, C. C., Gäfvert, M. and Lischinsky, P. (1998). Friction models and friction compensation, European Journal of Control 3(4): 176–195. Park, D., Chwa, D. and Hong, S.-K. (2006). An estimation and compensation of the friction in an inverted pendulum, SICE-ICASE International Joint Conference 18(21): 779 – 783. Teixeira, H. T., Siqueira, V. S. M. and Munaro, C. J. (2011). Identificação em malha fechada de parâmetros de modelos de atrito em um pêndulo invertido, Aceito para publicação na 10a Conferência Brasileira de Dinâmica, Controle e Aplicações . Thornhill, N. F., Huang, B. and Zhang, H. (2003). Detection of multiple oscillations in control loops, Journal of Process Control 13: 91 – 100. 337
Baixar