FLORIPA FLIGHT TRAINING
CURSO DE PILOTO COMERCIAL
CNS/ATM – RVSM – RNP e Congestionamento/Compactação do Espaço Aéreo
Diego Capeletti Coelho
Rafael Coelho Farias
Tiago Medeiros
FLORIANÓPOLIS
2012
FLORIPA FLIGHT TRAINING
CURSO DE PILOTO COMERCIAL
CNS/ATM – RVSM – RNP e Congestionamento/Compactação do Espaço Aéreo
Diego Capeletti Coelho
Rafael Coelho Farias
Tiago Medeiros
Prof. André Cardia
REG – Regulamentos de Tráfego Aéreo
FLORIANÓPOLIS
2012
SUMÁRIO
INTRODUÇÃO ............................................................................................................................ 4
Controller Pilot Data Link Communications (CPDLC) ................................................................ 5
Aircraft Communications Addressing and Reporting System (ACARS) ..................................... 8
Eventos OOOI ........................................................................................................................... 9
Selective Calling (SELCAL)....................................................................................................... 12
Radial/Area Navigation / Required Navigation Performance (RNAV / RNP) ........................... 14
Centro de Gerenciamento da Navegação Aérea (CGNA) ........................................................... 17
Global Positioning System (GPS) ............................................................................................... 18
Aumento de alertas de tráfego - TCAS (TA/RA) e acidentes/incidentes de colisão em vôo ...... 21
TCAS – Histórico .................................................................................................................... 21
TCAS – Funcionamento .......................................................................................................... 24
Tipos de TCAS ............................................................................................................................ 27
TCAS I .................................................................................................................................... 27
TCAS II ................................................................................................................................... 28
TCAS III.................................................................................................................................. 28
Ocorrências e estatísticas TCAS ................................................................................................. 28
Acidentes ................................................................................................................................. 33
1986 - Los Angeles, EUA - Vôo 498 da AeroMéxico ........................................................ 33
CONSIDERAÇÕES FINAIS ...................................................................................................... 36
REFERÊNCIAS .......................................................................................................................... 37
4
INTRODUÇÃO
Este trabalho elaborado pelos alunos Diego Capeletti Coelho, Rafael Coelho
Farias e Tiago Medeiros, do Curso de Piloto Comercial – Avião, da Escola de Aviação
Civil Floripa Flight Training, tem como finalidade o entendimento sobre as novas
tecnologias e aprovação no respectivo curso.
O presente trabalho consiste em um relatório sobre as novas tecnologias
empregadas no processo de controle do espaço aéreo no Brasil e no mundo, bem como
um panorama sobre alguns dos equipamentos utilizados pelas aeronaves comerciais
atuais.
Algumas das tecnologias mencionadas neste trabalho abrangem a área da
navegação aérea, enquanto outras são utilizadas no gerenciamento do fluxo de tráfego
aéreo, possibilitando que cada vez mais aeronaves estejam voando simultaneamente em
um
determinado
espaço
aéreo,
com
mais
Dentro do presente, vemos os equipamentos
eficiência
e
segurança.
CPDLC em contraposição ao
método de comunicação via canal de voz, e também os equipamentos ACARS e
SELCAL, que auxiliam e no gerenciamento operacional da aeronave tanto por parte da
tripulação
quanto
do
“pessoal
de
solo”.
Citamos também os métodos de navegação aérea RNAV/RNP, os quais nos
auxiliam em pontos fixos para uma navegação segura e confiável, mantendo as
aeronaves dentro dos mínimos de segurança.
Exploramos a implantação da tecnologia GPS com várias ramificações, como
GBAS/SBAS, GNSS e DGNSS, visando segurança, economia e eficiência.
Apresentamos uma retrospectiva sobre a concepção e uso do sistema TCAS
desde os anos 80, e a evolução destes sistemas nos últimos 30 anos e, além disto,
explicitamos alguns acidentes relacionados à tecnologia TCAS.
5
Controller Pilot Data Link Communications (CPDLC)
É um sistema que permite a comunicação entre um controlador de tráfego aéreo
e um piloto numa aeronave, através do Multi-Functional Control Display Unit (MCDU),
utilizando-se de um protocolo ou enlace para transmissão de dados digitalizados, em
forma de texto, suplementando o canal de comunicações por voz. É a principal
ferramenta do “método” de controle aéreo Control Navigation Surveilance/Air Traffic
Management (CNS/ATM).
Sua necessidade de implantação vem com o aumento do tráfego aéreo no
mundo. Em relação à comunicação via canal de voz, este aumento de tráfego faz com
que cada vez mais vôos estejam sintonizados numa mesma frequência de canal de voz, e
assim, as chances de um piloto sobremodular a transmissão de outro piloto aumentam,
necessitando que a devida transmissão seja repetida e também aumentando o risco de
acidentes por má interpretação da transmissão. Uma das estratégias adotadas para lidar
com esse aumento do tráfego aéreo e com o aumento das transmissões via canal de voz
em uma única frequência, foi a divisão de um determinado espaço aéreo em setores
menores, cada um com seu respectivo controlador; porém, essa solução apresentou
problemas, como por exemplo o aumento da transferência entre os setores, que requer a
troca de frequência entre o piloto e ambos controladores e também aumentou a
necessidade de coordenação entre os controladores em si. Outro problema relacionado a
esta setorização e aumento do número de frequências reside no fato de que o número de
frequências para canal de voz é limitado, e em espaços aéreos muito densos e
congestionados, pode não haver mais espaço para novas frequências, por isso, a
importância da implantação do CPDLC.
A utilização do CPDLC proporciona comunicações solo-ar para fins de controle
de tráfego aéreo através do uso de um conjunto de elementos de mensagens de
liberação, informação e solicitação, como no método de comunicações por voz.
O controlador tem a capacidade de emitir mensagens de atribuição de nível, desvios
laterais, mudanças de rota, atribuições de velocidade, autorizações, vários pedidos de
informações entre outras capacidades. O piloto tem a capacidade de responder as
mensagens, pedir autorizações e informações, e para declarar ou rescindir emergências.
Existe também um modo de “texto livre”, para trocar informações que não sejam
supridas pelos formatos definidos de mensagens. Uma capacidade auxiliar também
6
possibilita um sistema de solo a usar link de dados para mandar uma mensagem CPDLC
para outro sistema de solo.
Hoje em dia existem duas principais implementações do CPDLC:
O “FANS-1/A”, que foi originalmente desenvolvido pela Boeing e depois
adotado pela Airbus, que é primariamente usado nas rotas oceânicas por aviões
“widebody” de longo alcance. Inicialmente era usado no Pacífico Sul no final
dos anos 90 e mais tarde estendeu-se para o Atlântico Norte. O FANS-1/A é um
serviço baseado no Aircraft Communication Adressing and Reporting System
(ACARS) e, por causa de seu uso oceânico, usa principalmente comunicações
via satélite providas pelo serviço “Inmarsat Data-2”.
O sistema ATN/CPDLC, que é operacional no Centro de Controle do Espaço
Aéreo Superior do Eurocontrol em Maastricht, Holanda, e que agora foi
estendido pelo programa “Link 2000+” do Eurocontrol para várias outras Flight
Information Region (FIR) européias. As redes “VDL Mode 2” operadas pela
ARINC e pela SITA são usadas para manter o serviço europeu de ATN/CPDLC.
Protocolos de segurança ditam que as mensagens CPDLC não podem estar
corrompidas ou que sejam entregues a um destinatário errôneo. O sistema também deve
rejeitar mensagens atrasadas e as implementações CPDLC, tanto na aeronave quanto
nos centros ATC, devem ter acesso a um relógio preciso, para validação das mensagens
e evitar eventuais atrasos nas mesmas.
O CPDLC ajuda a reduzir o volume de comunicações via canal de voz, evitando
congestionamentos neste canal e é uma tecnologia nova que deve ser introduzida no
processo de controle de tráfego aéreo para lidar com o aumento do mesmo.
No Brasil, ele é utilizado na FIR Atlântico, pela companhia TAM, em substituição
do canal de voz.
Simulações feitas pela Federal Aviation Administration (FAA) com o uso do
CPDLC demonstrou que a ocupação do canal de voz diminuiu 75% durante operações
em rota em espaços aéreos congestionados. O resultado desta diminuição no canal de
voz é um aumento na segurança de vôo e eficiência através de comunicações mais
efetivas.
7
Datalink Control and Display Unit (DCDU) do A330, a interface do piloto para receber e enviar
mensagens CPDLC.
Interface CPDLC
8
Aircraft Communications Addressing and Reporting System (ACARS)
O ACARS1 é sistema digital de transmissão de dados, que pode ser utilizado na
comunicação entre aeronave, órgão ATC e controle operacional da companhia.
Foi criado em 1978 pela “Aeronautical Radio, Inc.” (ARINC) para complementar ou
aliviar as comunicações via rádio da companhia com a aeronave. Só começou a ser
usado em larga escala pelas empresas aéreas nos anos 80. Opera através das subredes
Very High Frequency (VHF), Satellite Communication (SATCON) e High Frequency
(HF). O meio de transmissão das mensagens ACARS pode ser via rádio ou satélite.
O sistema ACARS funciona na aeronave através de um computador chamado
Management Unit (MU) que recebe mensagens Terra-Ar e as responde, e do Control
Display Unit (CDU) que é uma interface entre a tripulação e o sistema ACARS,
normalmente formado por uma tela e uma impressora. A outra parte do sistema consiste
na
rede
de
estações
de
solo
da
ARINC
ou
SITA,
que
são
estações
transmissoras/receptoras remotas de ACARS e nos sistemas de computação e
comutação das mesmas. Existe ainda uma terceira parte do sistema, a “Air Carrier C22”,
que consiste das estações de operações das companhias aéreas, como o controle de
operações, manutenção e outras partes ligadas ao sistema ACARS.
Este CDU, também referido como MCDU, dá à tripulação a capacidade de
mandar e receber mensagens, como nos e-mails atualmente.
As mensagens do ACARS dividem-se em duas categorias: “Downlinks” para
comunicações feitas pela aeronave e “Uplinks” para as comunicações feitas pelas
estações de solo,
O ACARS transmite automaticamente, mensagens relativas à aeronave e às fases
do vôo em que ela se encontra, como posição da mesma, operação atual da aeronave e
também, eventos que fogem da normalidade de operação. Transmite também as
condições meteorológicas vigentes e eventos não cotidianos relativos ao vôo em si.
Através disto, as companhias podem ter um controle maior sobre suas aeronaves, sobre
seus avisos de manutenção e sobre a evolução de seus vôos. As companhias podem
também comunicar-se com suas aeronaves através desse sistema, sempre que
descobrirem algum problema ou julgarem necessário.
1
2
Disponível em http://www.airlomba.net/index.php?pag=acars. Acesso em 22 maio 2012.
C2 para Comand and Control
9
Inicialmente, o ACARS apenas mandava ao solo, mensagens relativas às fases
do vôo em que se encontrava a aeronave e algumas informações adicionais, como
combustível a bordo e também saída e destino. No final dos anos 80 e começo dos anos
90, o ACARS foi associado a outros aviônicos a bordo, uma interface de link de dados
entre o MU do ACARS e o Flight Management System (FMS) foi criada.
Essa interface permitiu que planos de vôo e informações meteorológicas fossem
mandadas do solo para o MU do ACARS, e a partir daí, serem enviadas ao FMS. Essa
modificação deu capacidade para as companhias de atualizar o FMS enquanto em vôo e
permitiu à tripulação avaliar novas condições meteorológicas ou planos de vôo
alternativos. As informações meteorológicas do ACARS são chamadas mensagens
Digital Automatic Terminal Information Service (D-ATIS)
O “cérebro” do sistema de link de dados a bordo da aeronave é o MU do
ACARS, nas novas versões ele é chamado de Communications Management Unit
(CMU).
As mensagens ACARS se dividem em:
Air Traffic Control (ATC)
Aeronautical Operational Control (AOC)
Airline Administrative Control (AAC)
As mensagens ATC, são mensagens para comunicações com o órgão ATC, usadas
pela tripulação para requerer autorizações e pelos controladores para prover tais
autorizações.
As mensagens AOC e AAC são utilizadas para a comunicação entre a aeronave e
sua base. Estas mensagens são bem variadas e podem conter informações de consumo
de combustível, dados de desempenho do motor, posição da aeronave e também
mensagens de texto livre.
Eventos OOOI
Um aspecto importante do uso do ACARS e uma das suas finalidades iniciais
são os “Eventos OOOI” (Out of the gate, Off the ground, On the ground, Into the gate).
Estes eventos são determinados por algoritmos no MU do ACARS, que se utilizavam de
sensores da aeronave como inputs. No início de cada fase do vôo, o MU do ACARS
transmite uma mensagem digital ao solo contendo a respectiva fase do vôo, a hora que
10
ela ocorreu e outras informações correlatas, como combustível a bordo, origem e
destino. Estas mensagens eram usadas para automatizar o processo de folha de
pagamento de uma companhia, onde as tripulações eram pagas taxas diferentes
dependendo da fase do vôo.
No Brasil, a utilização do ACARS é rotina pelos pilotos da TAM.
.
Mensagem ACARS do vôo da Air France AF447
11
Mensagem ACARS D-ATIS
Mensagem ACARS de reporte de posição
12
Selective Calling (SELCAL)
É um código de quatro letras utilizado nas comunicações entre aeronaves e
centros de controle, principalmente em vôos longos. Cada aeronave possui seu próprio
código SELCAL, que por sua vez é utilizado pelo operador de rádio num codificador
SELCAL. Este aparelho converte o código de quatro letras em tons audíveis
designados; então, estes tons são emitidos na frequência de rádio da companhia da
aeronave. Assim, o código é recebido por qualquer receptor (decodificador SELCAL)
de aeronave que esteja monitorando a frequência na qual o código está sendo
transmitido. Este sistema pode alertar aos pilotos de que uma estação de solo quer se
comunicar com a aeronave, mesmo estando com rádio da aeronave no mudo.
O SELCAL é utilizado da seguinte maneira: como a qualidade do sinal rádio é
ruim quando se está distante do ponto de comunicação, torna-se incomodo deixar o
rádio sempre num volume alto no cockpit, a exemplo de chiados na transmissão, então
logo no primeiro contato com o devido órgão Air Traffic Controll (ATC), o piloto
informa para o controlador o código SELCAL de sua aeronave, para que seja feita uma
chamada identificatória. Feito o chamado pelo órgão ATC, o decodificador SELCAL da
aeronave reconhece seu próprio código designado, uma luz indicativa se acende no
painel e um sinal sonoro respectivo ao código SELCAL da aeronave é ouvido na cabine
da aeronave, para indicar a chamada.
Cada vez que o controlador desejar enviar qualquer tipo de mensagem para a
respectiva aeronave, ele apenas seleciona o SELCAL testado anteriormente.
As vantagens do uso do SELCAL consistem no fato de os pilotos não precisarem
estar com o rádio sempre em volume alto, pois quando forem chamados pelo ATC, a luz
indicadora se acenderá, informando os pilotos da chamada, possibilitando aos mesmos
aumentarem o volume do rádio no momento de necessidade, diminuindo assim, a carga
de stress dos pilotos, que não precisam estar o tempo todo atentos ao rádio e podem
desempenhar outras atividades na cabine. Deste modo também facilitando e agilizando a
comunicação órgão ATC-aeronave e reduzindo perturbações dentro da cabine da
aeronave.
As atuais regras para designação de código SELCAL, com somente 16
letras/tons acaba por limitar o número de códigos possíveis para 10.920. Os códigos
SELCAL mais antigos possuem somente 12 letras/tons, assim, mais de uma aeronave
pode possuir o mesmo código. Para evitar tal ocorrência são usados códigos duplicados
13
para aeronaves que não operam normalmente nas mesmas regiões do mundo com as
mesmas frequências HF, porém, comumente aeronaves movem-se para regiões
diferentes e assim, ocorre com certa frequência aeronaves com o mesmo código
SELCAL estarem voando nas mesmas regiões e, para evitar problemas, é procedimento
os pilotos sempre verificarem o código SELCAL e o designativo da aeronave, para
terem certeza de eles mesmos serem os verdadeiros destinatários da chamada.
Exemplo de Designador SELCAL de aeronave
Mostrador SELCAL
14
SELCAL em funcionamento
Radial/Area Navigation / Required Navigation Performance (RNAV / RNP)
O crescimento contínuo da aviação aumenta as demandas sobre a capacidade do
espaço aéreo, enfatizando a necessidade de melhor utilização do espaço aéreo
disponível. Eficiência operacional, derivado da aplicação de técnicas de área de
navegação resultou no desenvolvimento de aplicações de navegação em várias regiões
em todo o mundo e para todas as fases de vôo. Essas aplicações poderiam ser
expandidas para fornecer orientação para operações de movimentação de terra.
Requisitos para aplicações de navegação em rotas específicas ou em um espaço
aéreo específico foram definidos de forma clara e concisa. Isto foi criado para assegurar
que a tripulação e os controladores de tráfego aéreo estejam cientes, das capacidades do
15
sistema RNAV, a fim de determinar o desempenho do sistema de RNAV, adequando-se
para os requisitos específicos de espaço aéreo.
Sistemas RNAV evoluído de um modo semelhante aos convencionais baseados
em terra, como rotas e procedimentos. Um sistema RNAV específico foi avaliado
através de uma combinação de análise e testes de vôo; para operações terrestres, os
sistemas iniciais usados foram o VHF do rádio-farol omnidirecional (VOR) e
equipamentos de medição de distância (DME) para estimar a posição; para operações
oceânicas, foram usados sistemas de navegação inercial (INS). Tais prescrições
resultaram em atrasos para a introdução de novas capacidades do sistema RNAV e
tambmaiores custos para a manutenção da certificação apropriada. Para evitar tais
especificações prescritivas de requisitos, um método alternativo para definir os
requisitos de equipamento foi introduzido. Isso permite a especificação de requisitos de
desempenho, independente da capacidade dos equipamentos disponíveis, e é
denominado com base no desempenho de navegação (PBN). Assim, RNAV é hoje uma
das técnicas de navegação de PBN, atualmente o outro só é exigido o desempenho de
navegação (RNP).
Sistemas RNAV e RNP são fundamentalmente semelhantes. A principal
diferença entre eles é a exigência de bordo de monitoramento de desempenho e
alerta. Uma especificação de navegação que inclui um requisito para a monitorização
do desempenho de navegação e de alerta é referido-se uma especificação de RNP. Não
tendo tais requisitos é referido como uma especificação RNAV. Um sistema de
navegação de área capaz de alcançar os requisitos de desempenho de uma especificação
de RNP é referido como um sistema de RNP.
Como resultado das decisões tomadas na indústria na década de 1990, os
sistemas RNAV mais modernos fornecem a bordo de monitoramento de desempenho e
alertas, pois as especificações de navegação desenvolvidos para o uso por estes sistemas
podem ser designados como RNP.
Muitos sistemas RNAV, oferecem alta precisão e possuem muitas das funções
fornecidas pelos sistemas RNP, não são capazes de fornecer uma garantia de seu
desempenho reconhecendo presente, e para evitar despesas desnecessárias, onde o
requisito do espaço aéreo não exigi a utilização de um sistema de RNP, bem como os
requisitos de navegação existentes continuam especificar RNAV em vez dos sistemas
de RNP. Por conseguinte, espera que as operações RNAV e RNP irá co-existir durante
muitos anos.
16
No entanto, os sistemas de RNP proporcionam melhorias na integridade da
operação, permitindo espaçamento em rota possivelmente mais perto, e pode
proporcionar uma integridade suficiente para permitir que apenas os sistemas de RNP a
ser usado para a navegação em um espaço aéreo específico. O uso de sistemas da RNP
pode, portanto, oferecer segurança significativa, operacional e benefícios de
eficiência. Enquanto as aplicações RNAV e RNP co-existem para um número de anos, é
de esperar que haverá uma transição gradual para RNP. Como a proporção de aeronaves
equipadas
com
Especificações
RNP
os
funcionais
navegação. Estes
sistemas
incluem
e
os
requisitos
custos
para
requisitos
de
transição
determinadas
reduzem.
funções
funcionais
de
incluem:
indicação contínua da posição da aeronave em relação à faixa a ser exibido para o piloto
através de um display de navegação situado em seu campo principal de visão;
com
exibição
exibição
navegação
de
de
distância
velocidade
função
no
de
e
solo
rumo
ou
para
o
tempo
armazenamento
à
ativo
(Para)
waypoint;
ativa
(Para)
waypoint;
de
dados
e
indicação de falha apropriada do sistema RNAV, incluindo seus sensores.
Os três principais erros são erro de caminho definição (PDE), a fuga de erro técnico
(FTE) e erro do sistema de navegação (NSE). A distribuição destes erros é assumido
como sendo independentes, zero-média e de Gauss. Portanto, a distribuição de erro do
sistema total (TSE) é também gaussiana com um desvio padrão igual ao quadrado soma
raiz (RSS) dos desvios padrão destes três erros.
PDE ocorre quando o caminho definido no sistema RNAV não corresponde ao
caminho desejado, isto é, o caminho deverá ser sobrevoado o chão. A utilização de um
sistema RNAV para navegação que pressupõe um caminho definido, e que representa o
percurso previsto é assim carregado para o banco de dados de navegação. Um caminho
consistente e repetitivo não pode ser definido por uma vez que permita um giro fly-by
em um waypoint (porque a proximidade para o waypoint e vetor vento não pode ser
repetitivo), requer um fly-over de um waypoint (porque o vetor vento não pode ser
repetitivo), ou ocorre quando a aeronave atinge uma altitude de destino (porque a
altitude alvo é dependente de propulsão do motor e peso da aeronave). Nestes casos, a
base de dados de navegação contém um ponto-a-ponto da trajectória de vôo desejada,
mas não pode explicar ao sistema RNAV definindo o como um fly-by. Um PDE
17
significativo e ETI não pode ser estabelecido sem um caminho de definição, resultando
em variabilidade na sua vez. Além disso, um caminho, determinado e repetitivo não
podem ser definido o caminho com base na posição e variabilidade resultante no
traçado das rotas.
Centro de Gerenciamento da Navegação Aérea (CGNA)
O Centro de Gerenciamento da Navegação Aérea (CGNA) é uma Organização
militar pertencente ao Comando da Aeronáutica e subordinada ao Departamento de
Controle do Espaço Aéreo (DECEA).
Fica situado na cidade do Rio de Janeiro e tem como missão exercer a gestão das
ações correntes dos processos de gerenciamento de tráfego aéreo (ATM) e de infraestrutura relacionada, visando a suficiência e a qualidade dos serviços prestados no
âmbito do Sistema de Controle do Espaço Aéreo Brasileiro (SISCEAB) e dos elos afins,
em tempo real e a partir das intenções de vôo
O CGNA tem por missão a harmonização do gerenciamento do fluxo de tráfego
aéreo, do espaço aéreo e das demais atividades relacionadas com a navegação aérea,
proporcionando a gestão operacional das ações correntes do SISCEAB e a efetiva
supervisão de todos os serviços prestados.
O CGNA é a mais recente das unidades do Departamento de Controle do Espaço
Aéreo (DECEA). Foi criada pela Portaria nº 1003/GC3, de 31 de agosto de 2005, e
ativada em 31 de agosto de 2007 pela Portaria nº 522/GC3, de 7 de agosto de 2007.
Sua concepção original foi aprovada em 1998, tendo como fator determinante o
crescimento da atividade aeronáutica em nossos aeroportos e no espaço aéreo. A
Comissão de Implantação do Sistema de Controle do Espaço Aéreo (CISCEA) abraçou
a missão de estabelecer o CGNA, na virada do século, a fim de consentir ao órgão a
gestão de ações correntes na área de gerenciamento de tráfego aéreo e sua infraestrutura relacionada.
A entrada em operação do CGNA tornou realidade o gerenciamento do fluxo
aéreo no espaço aéreo brasileiro, modernizando o controle de tráfego aéreo nacional,
facilitando o trabalho de pilotos e controladores de vôo e proporcionando maior
economia de combustível, sem perder de vista a segurança das operações aéreas.
Hoje, como integrante do Sistema de Aviação Civil, o órgão é o responsável pela
análise das intenções de vôos das aeronaves, no que diz respeito ao comprometimento
18
da infra-estrutura aeronáutica e aeroportuária (em coordenação com a INFRAERO e
ANAC), tendo em vista a harmonização do fluxo do tráfego.
A retomada do crescimento da atividade aeronáutica no país gerou a necessidade
de uma reação com as respostas adequadas. O CGNA, a rigor fruto da crise de
crescimento de demanda em ritmo surpreendente, hoje está voltado para as tempestivas
e rotineiras análises de demanda e capacidade, entre outras funções, sempre com o
objetivo de tornar o fluxo de tráfego aéreo mais rápido, ordenado, eficiente e seguro.
Descrição dos principais serviços oferecidos pelo CGNA:
Briefieng Internacional – Principais informações meteorológicas das Américas.
Cinzas Vulcânicas – Boletim atualizado da área de abrangência das cinzas
vulcânicas.
RPL – Planos de voo repetitivo programados para o Brasil.
Solicitação de Voo – Informações e procedimentos para solicitação de voo.
SLOT – Sistema para solicitação de SLOT em aeródromo coordenado.
Boletim de Tráfego Aéreo – Restrições de Tráfego Aéreo vigentes.
Boletim de Meteorológico - Previsão de impactos meteorológicos.
Harpia – Consulta de Rotas Aéreas.
Global Positioning System (GPS)
GPS (Global Positioning System) é o principal Sistema Global de Navegação
por Satélite (GNSS) utilizado para determinação da posição de radionavegação por
marinheiros e subjacente a consciência navegação, situacional e comunicações.
DGNSS continua a ser o meio aceito internacionalmente de proporcionar GNSS
Diferencial (DGPS no presente) correções e informações integridade para usuários. É
definida internacionalmente e é o padrão em todo o mundo. Harmonização regional de
freqüências e números de identificação da estação.
DGNSS é a criação de ferramentas de desenvolvimento de software para a
implementação eficiente e robusto de Radares Software Defined (SDR) em novas e
emergentes COTS multi-core DSP / plataformas de hardware FPGA. DGNSS também
está trabalhando na fusão de Rádios Software GNSS, posicionamento GNSS, navegação
inercial, Visual / infravermelho e rastreamento de alvos a laser de detecção, e Radar
19
Rastreamento para desenvolver as tecnologias que permitam o aumento da segurança,
produtividade e eficiência através da automatização. Suas finalidades são:
Melhorar eficiência e segurança no transporte aéreo;
Equipamentos
e
procedimentos
no
limite
operação;
Desenvolver novos sistemas com melhor desempenho;
Economia em todos os setores.
1) Limitaçoes de linha visada direta
2) Comunicações via SATELITE - ADS
de
20
1) Limitação de cobertura radar
2) Conexões entre ACFT e ATC automática
GBAS (Ground-Based Augmentation System) – Receptores gps em solo potencializando as trocas de
informações
21
SBAS no mundo – Space-Based Augmentation System – Iniciativa de diversos países. Garantir
interoperabilidade entre os sistemas
Aumento de alertas de tráfego - TCAS (TA/RA) e acidentes/incidentes de
colisão em vôo
TCAS – Histórico
A sigla TCAS, do inglês(Traffic Collision Avoidance System) que significa
Sistema Anticolisão de Tráfego é um conjunto de equipamentos eletrônicos de bordo
cujo objetivo é assegurar que aeronaves não entrem em trajetória de colisão.
As pesquisas com sistemas anticolisão existem desde 1950, e foram realizadas
por autoridades como a FAA, Admistração Federal de Aviação dos EUA. Entretanto
somente as colocaram em funcionamento após diversos acidentes de grandes
proporções, que envolveram grande número de vítimas. Alguns exemplos históricos de
acidentes com colisão em vôo incluem:
Colisão sobre o Grand Canyon (EUA), em 1956
Colisão em Zagreb, em 1976
22
Vôo PSA 182, colisão de um Boeing 727 com um Cessna 172 em 1978
(LAX)
Vôo 498 da AeroMéxico, em 1986, que se chocou com um avião similar
PSA vôo 182
Ilustração do acidente entre aeronave da United e TWA em 1956
O acidente ocorrido no Grand Canyon (EUA) entre uma aeronave da TWA e
outra da UNITED, em 1956, pode ser considerado um marco quanto a reflexão sobre o
risco de colisões aéreas, promovendo investimentos e estudos quanto a rotas de
navegação.
O Super Constellation da TWA e o DC-7 da United decolaram de Los Angeles
com apenas 3 minutos de diferença, ambos para o leste. Noventa minutos depois, fora
de contato com os controladores de voo em terra e ainda sem regras de voo visual, as
duas aeronaves estavam, aparentemente, manobrando em separado para permitir aos
seus passageiros a vista do Grand Canyon, quando as hélices da asa esquerda do DC-7
rasgaram a cauda do Super Constellation. Ambas as aeronaves caíram no desfiladeiro,
matando todas as 128 pessoas a bordo dois aviões. O acidente estimulou um upgrade de
250 milhões de dólares no sistema de controle do tráfego aéreo (ATC) - muito dinheiro
para aqueles dias. O investimento funcionou: não houve mais nenhuma colisão entre
dois aviões nos Estados Unidos em 47 anos. O acidente desencadeou a criação em 1958
23
da FAA - Federal Aviation Agency (agora Administration) para supervisionar a
segurança aérea.
Fabricantes de componentes aeronáuticos logo começaram a projetar um sistema
para evitar colisões, mas dois problemas surgiram na tentativa. Primeiro, a implantação
do sistema proposto requereria que as frotas das companhias fossem equipadas com um
novo equipamento de altíssimo investimento. Segundo, na maioria das aeronaves, não
havia espaço físico para esse novo equipamento.
Em 1974, a MITRE, fabricante de componentes aeronáuticos localizada em
Massachusetts e na Virginia, propôs uma alternativa. Usando os transponders, que já
estavam instalados nas aeronaves para efetuar a comunicação entre a aeronave e o
sistema de radar do controle de tráfego aéreo do FAA (ATCRBS), engenheiros
perceberam a vantagem em usar uma tecnologia existente, que agilizaria o projeto e o
processo de implantação.
O sistema de alerta de colisão aérea por sinal de rádio (BCAS - Beacon-Based
Collision Avoidance System) foi o antecessor do TCAS. Este sistema mandava sinais de
interrogação para as aeronaves próximas semelhante ao sistema radar do FAA. Então os
transponders das aeronaves próximas retornavam um sinal de resposta. O sistema
interpretava estes sinais para determinar a localização, velocidade e curso de cada
aeronave e usava a informação para projetar uma possível ameaça de conflito de
posição e gerar um alerta para evitar uma potencial colisão.
Os resultados de testes do BCAS foram prometedores. A MITRE equipou um
trailer para receber sinais de transponder como se fosse um avião. O BCAS superou as
expectativas, estimulando o centro técnico da FAA a testar o sistema em uma de suas
aeronaves. Baseando-se nesses dois testes, a FAA decidiu promover o desenvolvimento
do BCAS.
Em 1981, a FAA optou por seguir um projeto desenvolvido a partir do projeto
usado no BCAS, melhor que um sistema de alerta de colisão baseado no solo que estava
fora de consideração, então o BCAS foi renomeado TCAS.
Em agosto de 1986, enquanto o TCAS ainda estava em desenvolvimento, outro
desastre aéreo ocorreu em Cerritos, Califórnia. Conseqüentemente a este acidente, o
congresso americano passou um requerimento de lei ao FAA exigindo o uso do TCAS.
Em 1993, todas as aeronaves com mais de 30 assentos operando dentro do espaço aéreo
americano estavam equipadas com TCAS II. Para aeronaves com 10 a 30 assentos, foi
requerida a instalação do TCAS I.
24
No país o Regulamento Brasileiro de Aviação Civil (RBAC 135), prevê a
utilização de sistemas anticolisão, conforme item 135.180:
135.180 Sistema embarcado de prevenção de colisões
(ACAS)
(a) A menos que de outro modo autorizado pela ANAC, cada
detentor de certificado operando grandes aviões com motores a
turbina, que tenham uma configuração para passageiros com mais de
30 assentos, excluindo qualquer assento para tripulante, ou
peso máximo de decolagem aprovado acima de 15.000 kg, deve
equipar seus aviões com um sistema embarcado de prevenção de
colisões (ACAS II ou TCAS II, tipo 7.0) até 28 de janeiro de 2005.
(b) A menos que de outra forma autorizado pela ANAC,
ninguém pode operar um avião que possua motores a turbina e uma
configuração para passageiros com mais de 19 assentos, excluindo
qualquer assento para tripulante (peso máximo de decolagem
aprovado acima de 5.700 kg), a menos que ele seja equipado com um
sistema embarcado de prevenção de colisões (ACAS II ou TCAS
II,tipo 7.0) aprovado.
(c) Os manuais requeridos pela seção 135.21 devem conter as
seguintes informações sobre o ACAS II:
(1) procedimentos adequados e ações apropriadas da
tripulação para a operação do equipamento, incluindo a informação de
que, no evento de um alarme de colisão emitido pelo sistema ACAS
II, o piloto em comando deve obedecer, exclusivamente, às
orientações emanadas do próprio sistema; e
(2) uma descrição de todas as fontes de informação que
devem estar operativas para que o ACAS II opere adequadamente.
(d) Ninguém pode operar um avião equipado com um TCAS
II em espaço aéreo RVSM, a menos que seu equipamento seja do tipo
TCAS II, tipo 7.0 (ACAS II).
TCAS – Funcionamento
O TCAS funciona através da comunicação eletrônica entre todas as aeronaves
que estejam equipadas com um transponder apropriado. Utiliza a frequência de
1030MHz para interrogar todos os transponders das aeronaves que estejam ao seu
alcance. Os transponders dessas aeronaves então "respondem" a interrogação, utilizando
a frequencia de 1090MHz. Este ciclo de "perguntas e respostas" eletrônicas pode
ocorrer diversas vezes por segundo.
Através da constante troca de dados, o computador interno do TCAS constrói
um mapa tridimensional das aeronaves que se encontram no espaço aéreo circunvizinho
e abastece esse espaço tridimensional com informações tais como localização, rumo,
altitude e velocidade das demais aeronaves. Utilizando esses dados, o sistema então
projeta a posição futura de todas as aeronaves, e assim determina os potenciais riscos de
colisão.
25
É importante lembrar que o funcionamento correto do TCAS depende da
presença do equipamento em ambas aeronaves, com transponder modo C e os
equipamentos devem estar simultaneamente em operação. Recentemente, no Brasil, o
caso da colisão em vôo entre o jato Legacy da Excel Air e o Boeing Gol do vôo 1907
esteve, entre outras razões, relacionado a inoperância (intencional ou não) do TCAS
presente no jato executivo.
O conjunto de componentes do TCAS monitora o espaço aéreo ao redor de uma
aeronave independente do controle de tráfego aéreo, criando uma espécie de “bolha” de
segurança, monitorando níveis de risco de colisão e/ou aproximação excessiva de outro
tráfego. O TCAS é um sistema obrigatório em aeronaves com mais de 5700 quilos e
autorizada a carregar mais de 19 passageiros.
Apesar de os sistemas ocasionalmente dispararem alarmes falsos, os pilotos são
instruídos a considerarem verdadeiras todas as mensagens do TCAS e imediatamente
responderem aos RAs. Tanto a FAA como as autoridades de aviação dos países
signatários da ICAO estabelecem que, em caso de conflito entre as mensagens do TCAS
e as do controle de tráfego aéreo, devem ser seguidas as mensagens do TCAS.
Ilustração funcionamento do TCAS
26
Quando a resposta do transponder de uma aeronave é recebida, a aeronave
detectada passa a ser exibida em um display, no painel de instrumentos, e tanto a
posição quanto o movimento relativo entre as aeronaves passam a ser avaliados.
Quando a distância e/ou a trajetória relativa entre elas atinge um certo nível de
risco, o sistema emite uma mensagem oral ("Traffic! Traffic!") aos pilotos. Se a
situação evolui para um grau de perigo de colisão, o sistema emite comandos orais e
visuais, no painel da aeronave, indicando manobras evasivas a serem empregadas
imediatamente pelo piloto em comando. Esse comando visual e oral é chamado RA
(Resolution Advisory ou aviso de resolução).
Quando a aeronave conflitante também for equipada com o sistema TCAS, as
manobras evasivas são negociadas pelos equipamentos entre si, de modo que os RAs ou
avisos de resolução sejam dados aos pilotos em direções divergentes.
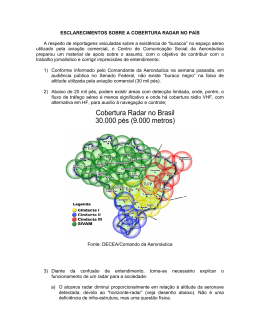
Ilustração do TCAS em operação. Note que o sistema detectou a presença de duas aeronaves, que são
representadas pelos losangos (ícones em forma de diamante).
27
Na imagem acima, pode-se observar a presença de dois aviões situados à frente
do atual avião: um encontra-se 800 pés mais alto (indicação "+08"), em trajetória de
descida (pequena seta orientada para baixo), portanto em risco de colisão; o outro avião
encontra-se mais à frente e 600 pés mais alto (indicação "+06"), em altitude constante
(ausência de seta). O ícone em formato de losango (ou diamante) representa uma
aeronave e fica "sólido" (preenchido) quando a aeronave está dentro da região de risco - como é o caso da primeira -- e "vazio" (oco, não preenchido) quando a aeronave está
fora da região de risco -- como é o caso da segunda aeronave.
Imagens TCAS em operação
Tipos de TCAS
TCAS I
O TCAS I é a primeira geração de tecnologia de eviatação de colisão. É um
sistema mais barato e menos capaz que os modernos TCAS II. O TCAS I monitora a
situação de tráfico ao redor da aeronave em um raio de 65 km e oferece informações de
rumo e altitude de outras aeronaves. Além disso, o sistema gera alertas de colisão na
forma de TA (Traffic Advisory ou Aviso de Tráfego).
28
O TA alerta ao piloto que outra aeronave está próxima de sua vizinhança,
emitindo um alerta sonoro de "traffic, traffic", mas não oferece nenhuma forma de
correção. Cabe ao piloto e ao controle de tráfego decidir o que fazer. Quando a ameaça
termina, o sistema anuncia "clear of conflict", ou livre de conflito.
TCAS II
O TCA II é a segunda geração desse tipo de instrumento e atualmente é usado na
maioria da frota da aviação comercial.
O TCAS II oferece todos os benefícios do TCAS I, mas oferece ao piloto
instruções orais para que o perigo seja evitado. Os avisos podem ser do tipo "corretivos"
que sugerem ao piloto mudanças de altitude através de alertas do tipo "descend,
descend" ou "climb, climb" (desça, desça ou suba, suba), ou preventivos que sugerem
ações. Outros alertas podem ser emitidos, entre eles "Monitor Vertical Speed", que
sugere ao piloto que monitore sua velocidade vertical.
O sistema TCAS II opera de forma sincronizada entre todos os aviões de uma
mesma vizinhança. Se em um deles o TCAS II alerta o piloto a descer, em outra
aeronave o sistema informa o comandante a subir, maximizando assim a separação entre
duas aeronaves.
TCAS III
O TCAS III é a próxima geração dos sistemas anticolisão, e atualmente
encontra-se em fase de desenvolvimento. O sistema deverá permitir aos pilotos
manobras horizontais, além das manobras verticais disponíveis nas duas classes atuais.
O sistema poderá instruir o comandante a "virar à direita e subir", enquanto na outra
aeronave o alerta seria de "virar à direita e descer", permitindo total separação entre os
aviões: tanto vertical como horizontal.
Ocorrências e estatísticas TCAS
29
Dados coletados pelo EuroControl nos últimos 2 anos, com o programa PASS
(Performance and safety Aspects of Short-term Conflict Alerta), avaliram as ocorrências
de incidentes mais comuns, qualificando estas e avaliando quantitativamente as ações
tomadas em cada caso (RA).
Detalhamos a seguir análises de uma amostra de 72 ocorrências em que ao
menos uma das aeronaves recebeu um RA (Resolution Advisory), incluindo cerca de
metade destas ocorrências com o chamado Single RA, no qual apenas uma das
aeronaves recebeu uma orientação visual/sonora sobre a manobra a ser executada.
Ocorrências de RA simultâneas e single
O trabalho realizado no programa PASS indicou ainda que em aeronaves onde
houve registro de um RA, 94% dos pilotos reportam ao ATC a ocorrência, já em
situações onde apenas um TA foi registrado cerca de 90% dos pilotos não reportam
sobre a situação.
30
Em uma análise somente nas aeronaves com ocorrência de RA, avaliando 35
casos de RA coordenado, ou seja, ambas aeronaves receberam um resolution, notamos
que 21% dos pilotos não reportam nem mesmo estas situações.
Reports em RA coordenado.
Este índice de 21% de pilotos que não reportam um RA pode estar também
relacionado ao fato de que um indivíduo pode presumir (ou ter copiado na fonia) que
outra aeronave já reportou o mesmo incidente.
A tabela a seguir indica o tipo de report efetuado em cada RA, considerando
uma amostra de 107 ocorrências.
Tipo de report de acordo com a ocorrência TCAS
31
Outro estudo realizado pelo EuroControl que monitorou a qualidade e conteúdo
de TCAS RA reportados ao ATC por pilotos, revisando ocorrências desde 2000 com
uma amostra superior a 13.000 situações. Esta grande amostra foi obtida a partir de
relatórios anônimos em linhas aéreas e estatísticas internas do controle de tráfego aéreo
Europeu).
Uma fatia desta base de informações, contém cerca de 250 relatórios de
ocorrências de acidentes ou incidentes sérios.
Em situações de RA com risco iminente, todos os casos examinados indicam que
os pilotos tomaram ações evasivas seguindo rigorosamente a instrução do TCAS, em
desacordo com a clearance dada pelo ATC anteriormente.
Identificamos pela figura abaixo que a maior parte de situações envolvendo RA
ocorre no espaço aéreo inferior:
Analisando detalhadamente os RAs registrados no espaço aéreo inferior e
também superior, notamos que a maioria das ações indicadas pelo equipamento TCAS
esteve relacionada a “subir”, como vemos nos gráficos a seguir.
32
Ocorrências em Espaço aéreo SUPERIOR
Ocorrências em espaço aéreo INFERIOR
Uma segunda análise realizada em 107 casos TCAS/RAs, nos quais houve
registro de acidente ou incidente sérios, registram o tempo médio entre a ocorrência de
um RA e o respectivo report para o ATC. Em média, o report é feito até 22 segundos do
primeiro RA.
33
A ausência (ou demora) nos reports ao ATC deve-se, segundo o EuroControl,
aos seguintes fatores predominantes:
Carga de trabalho elevada dos pilotos e níveis de estresse relacionados ao
RA;
Tempo relativamente curto entre um RA e a eliminação do conflito;
Ocorrências múltiplas e simultâneas de RA;
Manuais de padronização de companhias aéreas que não priorizam o
report do RA.
Acidentes
Além do caso já citado (TWA e UNITED em 1956), apresentamos alguns outros
acidentes relacionados a colisões em vôo:
1986 - Los Angeles, EUA - Vôo 498 da AeroMéxico
Um Piper Archer que trafegava na área de controle do Terminal de Los Angeles
em 31 de agosto de 1986. Não detectado pelos controladores de solo, o pequeno avião
34
entrou no no caminho de um DC-9 da Aeroméxico que se aproximava para aterrissar no
Aeroporto Internacional de Los Angeles. O Piper colidiu contra o lado esquerdo do
estabilizador horizontal do DC-9. Ambos os aviões caíram em um bairro residencial a
20 milhas a leste do aeroporto, matando 82 pessoas, incluindo 15 no solo. A FAA
exigiu, subsequentemente, que as pequenas aeronaves passassem a utilizar transponders
- dispositivos eletrônicos que dão posição e altitude para os controladores. Além disso,
aviões foram obrigados a ter o equipamento anti-colisão TCAS II, que detecta
potenciais colisões com outros aparelhos equipados com transponder e aconselham os
pilotos a subir ou mergulhar como resposta ao alerta. Desde então, nenhum pequeno
avião colidiu com um avião em voo nos Estados Unidos.
Ação proposta: Transponder e TCAS II em
pequenos aviões.
35
2006 – Serra do Cachimbo/MT, Brasil – Acidente entre Boeing 737-800 e
Legacy EMB-135
A aeronave B737-8EH, realizando o vôo 1907 da GOL, foi atingida por um jato
Legacy EMB-135 de uma companhia de taxi-aéreo americana durante vôo de cruzeiro
na região Amazonica brasileira. 154 pessoas morreram.
Um dos fatores contribuintes apontados na investigação do CENIPA está
relacionado a operação do TCAS.
36
CONSIDERAÇÕES FINAIS
O tráfego aéreo mundial dobrou em intervalos de 15 anos, durante as últimas 3
décadas, e institutos de pesquisas estimam que essa taxa seja mantida ao menos até
2025. O fluxo atual de passageiros é estimado em 12 trilhões de passageiros por
kilometro pago em 2030.
Somente a América Latina deve incorporar mais de 2.000 aeronaves com mais
de 100 assentos, representando US$200 bilhões em investimentos, o Brasil deve ficar
com 700 destas aeronaves nos próximos 20 anos. Considerando o grande montante a
ser investido em aeronaves, há de se esperar que o investimento em infra-estrutura
aeroportuária e de auxílio ã navegação aérea (incluindo metodologias) seja
proporcional.
A aplicação de novas tecnologias orientadas a navegação e gestão do fluxo de
tráfego aéreo torna-se ainda mais necessária em um cenário com expectativa de
crescimento agressivo nas próximas décadas.
Algumas das tecnologias já amplamente utilizadas em outros países ainda são
relativamente novas – ou pouco usadas – no Brasil, outras tecnologias em
desenvolvimento em países mais desenvolvidos devem chegar nos próximos anos,
puxadas pelo crescimento econômico e investimentos em infra-estrutura.
Acidentes como o caso GOL – Legacy reforçam a necessidade de se reavaliar a
gestão de riscos envolvidos na navegação aérea e aplicar os investimentos necessários
em novas tecnologias e métodos mais eficientes.
37
REFERÊNCIAS
BIM JUNIOR, Marcelo Cesar. TCAS II - Conceito e Operação. 2007. 122 f.
Monografia (Graduação) - Curso de Faculdade de Ciências Aeronáuticas, Pontífica
Universidade Católica do Rio Grande do Sul, Porto Alegre, 2007.
BRASIL. Departamento de Controle do Espaço Aéreo. Departamento de Controle do
Espaço Aéreo. Disponível em: <http://www.decea.gov.br/cnsatm/>. Acesso em: 22
maio 2012.
BRASIL. Força Aérea Brasileira. ESPECIAL - Comunicação no tráfego aéreo do
futuro (CNS/ATM) será realizada por meio de satélites. Disponível em:
<http://www.fab.mil.br/portal/capa/index.php?mostra=8446>. Acesso em: 22 maio
2012.
BRASIL, Centro de Gerenciamento da Navegação Aérea. Centro de Gerenciamento
da Navegação Aérea. Disponível em: < http://www.cgna.gov.br/>. Acesso em 27 maio
2012.
BRASIL, Mundo Aviação. SEGURANÇA DE VOO: ACARS. Disponível em:
<http://www.mundoaviacaobrasil.com/2010/09/seguranca-de-voo-acars.html>. Acesso
em: 23 maio 2012.
BRASIL, Mundo Aviação. SALA DE AULA:TCAS (Traffic Alert and Collision
Avoidance
System).
Disponível
em:
<http://www.mundoaviacaobrasil.com/2010/09/sala-de-aulatcas-traffic-alert-and.html>.
Acesso em: 27 maio 2012.
LITO, Autor do blog. Vazaram as mensagens de ACARS do AF447. Disponível em:
<http://avioesemusicas.com/vazaram-as-mensagens-de-acars-do-af447.html>. Acesso
em: 23 maio 2012.
EUROPA, EUROCONTROL. Eurocontrol Disponível em:
<http://www.eurocontrol.int/safetynets/gallery/content/public/docs/PASS/PASS_WA1_WP5_100W_v1.0.pdf>. Acesso
em: 26 maio 2012.
ESTADOS UNIDOS, FAA . Transponder Disponível em:
<http://rgl.faa.gov/Regulatory_and_Guidance_Library/rgtso.nsf/0/acbba541ff4c071d86
256dc10067f209/$FILE/C74c.pdf>. Acesso em: 26 maio 2012
Baixar