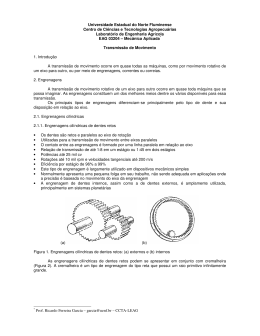
Elementos máquina I • Código: ENG 444 • Carga horária: 68 horas • Prof. Édison P. Kolton Calendário Verificação D S T MAI Q Q S S 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 D S T 1 6 7 8 13 14 15 20 21 22 27 28 29 JUN Q 2 9 16 23 30 Verificação Q S S 3 4 5 10 11 12 17 18 19 24 25 26 D 4 11 18 25 S JUL T Q Q S S 1 2 3 5 6 7 8 9 10 12 13 14 15 16 17 19 20 21 22 23 24 26 27 28 29 30 31 S 2 9 16 23 30 AGO T Q Q S 3 4 5 6 10 11 12 13 17 18 19 20 24 25 26 27 31 Prova final OBJETIVOS Aplicar os conhecimentos adquiridos nas disciplinas de Fadiga, Mecânica dos Sólidos (Resistência dos Materiais) e Física no dimensionamento estático e dinâmico de alguns elementos de máquinas. EMENTA Cinemática de engrenagens. Capacidade de carga de engrenagens cilíndricas e de coroa sem fim . Acoplamentos. Eixos e árvores. Mancais de rolamento e deslizamento. Lubrificação. METODOLOGIA Aulas teóricas expositivas; . Serão utilizados métodos audiovisuais (uso de datashow) Aulas práticas com a resolução de problemas aplicativos dos assuntos teóricos expostos; Avaliação - Através de 2 verificações escritas, além do exame final. Transmissões Def. 1: pro-tec capítulo 8 As máquinas,podem ser decompostas em tantas máquinas simples.Nelas cada elemento transmite ou recebe próprio movimento por meio de mecanismos chamados TRANSMISSÕES. Def. 2: Niemann capítulo 20 São elementos de máquinas para transmitir esforços e/ou movimento de um mecanismo para outro. Transmissões podem se realizar: Por contato direto: Ex. rodas de fricção,engrenagens,cames,... Por ligação flexível: Ex.: correias,correntes,cabos... Por ligação rígida: Ex.: biela,manivela,excêntricos... Alguns tipos *Transmissões (Mecânica)* Por Correias • Para eixos paralelos e reversos. • Construção simples,silencioso,absorve choques. • Preço reduzido ( aprox.63% da transmissão por engrenagem). • Dimensões e distancia entre eixos maiores.. • Vida correias menores e escorregamento de 1% a 3%. • Correias plana: Multiplicação até 5 (10) , pot. até 2200 cv e vt 90 m/s. Por Correntes • Correias em V: Multiplicação até 8 (15) , pot. até 1500 cv e vt 26 m/s. • Para eixos paralelos e distancias entre eixos maiores. •Preço reduzido ( aprox.85% da transmissão por engrenagem). •Vida correntes menores(desgaste articulações). •Não apresentam escorregamento. • Correias plana: Multiplicação até 6 (10) , pot. até 5000 cv e vt 17 m/s. *A transferência de potência de um órgão motor para um órgão movido é feita por intermédio de um conjunto de componentes designados por transmissão. Alguns tipos *Transmissões (Mecânica)* Por Rodas de atrito • Para eixos paralelos ou concorrentes. • Diam. rodas, esforços mancais e escorregamento são aprox. iguais a transmissão por correias(quando coef. atrito elevado). • Distância entre eixos,peso e preço mais vantajosos. • Amortecimento choque menor e ruído mais elevado. • Multiplicação até 6 (10) , pot. até 200 cv e vt 20 m / s. Por engrenagens • Para eixos paralelos, reversos ou concorrentes. • Operação se deslizamento, tempo de vida e resit. a sobrecarga maiores.. • Pequena manut., dimensões reduzidas,.. •Maiores custos, ruído e rigidez. • Potência, rotação e relação multiplicação varia de valores mínimos até máximos. Ex.: Eng. Cilíndricas, 2 estagios,: multiplicação 45(300), 25000 cv e vt 200 m/s. Resumo Escolha ?? Transmissão movimento circular por contato direto Rodas de Fricção Se força de atrito suficiente : •Não escorrega; •Ambas engrenagens tem velocidades periféricas iguais. •Não altera a relação de transmissão. Força tangencial Relação transmissão Deficiência desse mecanismo: • Capacidade relativamente baixa de torque; •Possibilidade de escorregamento. Transmissão movimento circular por contato direto Engrenagens cilíndricas de dentes retos •Para necessidade de sintonia de fase eixos entrada e saída ( Sincronismo): Transmissão movimento circular por contato direto Engrenamento: Roda de fricção •Ponto de contato C , C´ e curva(linha) de contato. •Ângulo de pressão (θ). •O início do contato se dá quando o pé da engrenagem motora encontra a cabeça da engrenagem movida. Transmissão movimento circular por contato direto •Lei fundamental de engrenamento Razão de velocidade angular das engrenagens de um par de engrenagens deve manter-se constante durante o engrenamento. •Diâmetro primitivo coroa. •Diâmetro primitivo pinhão. Velocidade angular Para lei ser verdadeira a lei: Os contornos do dente nos dentes engrenagentes devem ser conjugados um ao outro,através perfil adequado: • Engrenagem de perfil envolvente.(mais utilizado) •Engrenagem de perfil cicloidal. Ação conjugada Quando os perfis de dente são projetados para produzir um razão de velocidade angular constante durante o engrenamento ,diz-se que o mesmo tem ação conjugada. wA / wB = rA / rB Uma razão de velocidades angulares constantes requer uma razão de raios primitivos constante.As linhas de ação de cada ponto de contato instantâneo devem passar pelo mesmo ponto fixo(P). Perfil conjugado Condições: •Para que a transmissão por engrenagens se efetue com relação constante,é necessário que a perepenticular ás curvas dos perfis dos dentes em contato,traçado pelo ponto de contato,passe pelo ponto de tangência das circunferências primitivas. •Os dentes de engrenagens podem ser perfilados com curvas quaisquer que obedeçam à lei fundamental de engrenamento. Perfil conjugado Perfil conjugado Curvas usualmente empregadas; A ciclóide é ainda usada como forma de dente em alguns relógios de pulso e parede. Mas a maioria das engrenagens usa a involuta (envolvente) de um círculo para forma deles. Perfil conjugado Engrenagens envolventes: Engrenagens envolventes: Perfil conjugado Vantagens desvantagens Perfil conjugado Engrenagens cicloidais: Perfil conjugado Engrenagens cicloidais: Vantagens desvantagens Classificação engrenagens Classificação engrenagens Perfil conjugado Engrenamentos: Perfil envolvente Perfil envolvente Perfil envolvente Perfil envolvente Construindo uma curva envolvente 1. Divida o círculo de base em partes iguais e construa linhas radiais OA0,OA1,OA2,etc 2. Começando em A1,construa perpenticulares A1B1, A2B2, A3B3,etc. 3. Ao longo de A1B1 marque a distancia de A1A0. 4. Ao longo de A2B2 marque duas vezes a distancia A1A0, etc
Baixar