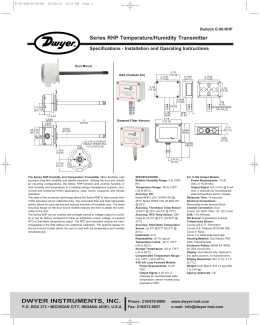
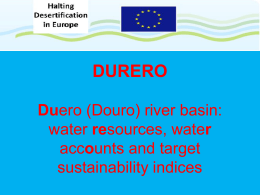
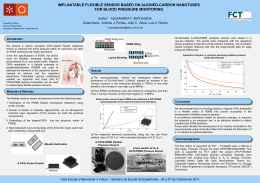
Sensor Fusion Applied to Soccer Robots LEIC 27 de Fevereiro de 2003 Prepared by: Pedro Marcelino Oriented by: Prof. Pedro Lima TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Topics LEIC 27 de Fevereiro de 2003 • • • • • • • • Motivation Sensors Caracteristics Sensors as Members of a Team Sensor Models Observation Integration Implemented Algoritms Experimental Results Conclusions TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Topics LEIC 27 de Fevereiro de 2003 • • • • • • • • Motivation Sensors Caracteristics Sensors as Members of a Team Sensor Models Observation Integration Implemented Algoritms Experimental Results Conclusions TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Motivation • Increased interest in the developing of multi-sensor robots • Limitations in the reconstruction of environments • Observation errors, bad calibrations or partial and incomplete information of the world • Cooperation to resolve ambiguities • Robust and consistent description of the world • Team with a common goal and shared knowledge, so it can take the right decisions. LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Topics LEIC 27 de Fevereiro de 2003 • • • • • • • • Motivation Sensors Caracteristics Sensors as Members of a Team Sensor Models Observation Integration Implemented Algoritms Experimental Results Conclusions TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Sensors Caracteristics • • • • Sensor Complexity Observation Error Observation Disparity Multiples Points of View LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Topics LEIC 27 de Fevereiro de 2003 • • • • • • • • Motivation Sensors Caracteristics Sensors as Members of a Team Sensor Models Observation Integration Implemented Algoritms Experimental Results Conclusions TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Sensor as a Team Member • • • • • • LEIC 27 de Fevereiro de 2003 Multi-Sensorial System = Team of Sensors Each sensor is considerer an individual Each sensor make local decisions Each sensor implements its actions The Team coordinate the activity of its members Information exchange to resolve conflits and validation of observations • Makes the Team Decision Problema a simple Estimation Problem TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Topics LEIC 27 de Fevereiro de 2003 • • • • • • • • Motivation Sensors Caracteristics Sensors as Members of a Team Sensor Models Observation Integration Implemented Algoritms Experimental Results Conclusions TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Sensor Models • Observation Model It is a static description of the sensor performance, realting the observation with the state of teh environment Front Camera Model C Up Camera Model CL LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Front Camera Observation Model Variância (m) Modelo da Câmara da Frente 1.4 1.2 1 0.8 0.6 0.4 0.2 0 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 Distância (m) Modelo da Câmara da Frente XX Modelo da Câmara da Frente YY LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Up Camera Observation Model Modelo da Câmara da Cima Variância (m) 0.25 0.2 0.15 0.1 0.05 0 0 0.5 1 1.5 2 2.5 3 3.5 Distância (m) Modelo da Câmara da Cima XX Modelo da Câmara da Cima YY LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Sensor Models • State Model Relates the observation of a sensor with a given location and its internal state Perspective change to a common frame so that the observation can be compared LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” State Model • Each feature is represented as with a gauss distribuition • Mean • Variance • Angle with central axis • Distance to feature • New variance results from the perspective transformation to a global frame LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Sensor Models • Dependency Model Describe sthe relation between the observations and the actions of each sensor Team Utility Function Team Decision Fucntion Groups Rational Aximos Each member makes a decision that maximizes its Team Utility Function LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Topics LEIC 27 de Fevereiro de 2003 • • • • • • • • Motivation Sensors Caracteristics Sensors as Members of a Team Sensor Models Observation Integration Implemented Algoritms Experimental Results Conclusions TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Observation Integration • Each feature is modeled by a gauss distribution, using Bayes Law • If the Mahalanobis distance is less than 1, then there is agreement and the team member will cooperate, to estimate the feature position, otherwise, there is desagreement and the team member observation will not be used LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Observation Integration • Two bayes observers showing agreement LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Observation Integration • Two bayes observers showing desagreemnet LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Topics LEIC 27 de Fevereiro de 2003 • • • • • • • • Motivation Sensors Caracteristics Sensors as Members of a Team Sensor Models Observation Integration Implemented Algoritms Experimental Results Conclusions TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Implemented Algoritms – Ball Detection • Ball detection in front Camera LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Implemented Algoritms – Ball Detection • Ball detection un Up Camera LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Camera Models Comparação das Posições Observadas pelas Câmaras e a Posição Real da Bola ao longo de uma Linha Recta Eixo YY (m) 0.15 0.05 -0.05 0 0.5 1 1.5 2 2.5 3 3.5 4 -0.15 Eixo XX (m) Posição Câmara Cima Posição Câmara Frente Comparação dos Erros de Leitura segundo Eixo XX ao longo de uma Linha Recta Comparação dos Erros de Leitura segundo Eixo YY ao longo de uma Linha Recta LEIC 0.6 Erro (m) Erro (m) 0.8 0.4 0.2 0 0.25 0.5 0.75 1 1.25 1.5 1.75 2.25 2.5 2.75 3 3.25 0.12 0.1 0.08 0.06 0.04 0.02 0 0.25 0.5 0.75 Distância ao Robot (m) Erro Câmara Cima XX 27 de Fevereiro de 2003 2 Posição Real Erro Câmara Frente XX 1 1.25 1.5 1.75 2 2.25 2.5 2.75 Distância ao Robot (m) Erro Câmara Cima YY TFC “Sensor Fusion”– Pedro Marcelino Erro Câmara Frente YY 3 3.25 “Sensor Fusion” Sensor Models Diagram Observation of Sensor 1 Observation of Sensor 2 Observation Model Observation Model Sensor Model State Model State Model Change of perspective to Global Frame Dependency Model Decision and Integration of Observation Team Utility Function Structure that keeps all decisions made by the team members New Fusion Validation Variance Increase with Time LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Topics LEIC 27 de Fevereiro de 2003 • • • • • • • • Motivation Sensors Caracteristics Sensors as Members of a Team Sensor Models Observation Integration Implemented Algoritms Experimental Results Conclusions TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Experimental Results Comparação da Trajectória da Bola com a Fusão e dados Observados ao longo de uma Linha Recta Eixo YY (m) 0.15 0.05 -0.05 0 0.5 1 1.5 2 2.5 3 3.5 4 -0.15 Eixo XX (m) Posição Câmara Cima Posição Câmara Frente Posição Real Posição Fusão Comparação dos Erros segundo Eixo XX ao longo de uma Linha Recta Comparação dos Erros segundo Eixo YY ao longo de uma Linha Recta LEIC 0.6 Erro (m) Erro (m) 0.8 0.4 0.2 0 0.25 0.5 0.75 1 1.25 1.5 1.75 2 2.25 2.5 2.75 3 3.25 0.12 0.1 0.08 0.06 0.04 0.02 0 0.25 0.5 0.75 Distância ao Robot (m) Erro Câmara Cima XX 27 de Fevereiro de 2003 Erro Câmara Frente XX 1 1.25 1.5 1.75 2 2.25 2.5 2.75 3 3.25 Distância ao Robot (m) Erro Fusão XX Erro Câmara Cima YY TFC “Sensor Fusion”– Pedro Marcelino Erro Câmara Frente YY Erro Fusão YY “Sensor Fusion” Topics LEIC 27 de Fevereiro de 2003 • • • • • • • • Motivation Sensors Caracteristics Sensors as Members of a Team Sensor Models Observation Integration Implemented Algoritms Experimental Results Conclusions TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Conclusions • • • • • • Real time fusion of the world information Good estimative of features localization Makes system more robust, eliminating sporadic errors Coerent World decription Use of Bayes Teorem to solve the decision problem It is a really good method to be used in modern robotics, which should be used whenever possible to determine the position and orientation of the environment features that surrond the robot LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Future Work To be developed during the Master • Sensor Fusion of several robots • Other players detection • Team players detection • Sensor Fusion to determine robot position LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino “Sensor Fusion” Sensor Fusion Diagram BlackBoard Dependency Model global.worldmodel.* World Model Local Sensor Fusion Algoritm of Other Robots Global Sensor Fusion Algoritm Dependency Model Local Sensor Fusion Algoritm BlackBoard local.up.* local.front.* local.sonars.* local.odometry.* Observation and State Model Up Camera Front Camera Sonars Odometry Sensors Up Camera Front Camera Sonars Odometry LEIC 27 de Fevereiro de 2003 TFC “Sensor Fusion”– Pedro Marcelino Team Members LEIC 27 de Fevereiro de 2003 • Docentes do IST: • Pedro Lima (coordenação) - DEEC • Luis Custódio (coordenação) - DEEC • Carlos Pinto Ferreira (professor associado) - DEM • Alunos de Doutoramento (EEC): • Miguel Garção • Alunos Finalistas (TFC): • Bruno Damas - LEEC • Pedro Pinheiro - LEIC • Hugo Costelha - LEEC • Gonçalo Neto - LEEC • Cláudio Gil – LEIC • Miguel Arroz – LEIC • Bruno – LEIC TFC “Sensor Fusion”– Pedro Marcelino
Baixar