Universidade Federal da Paraíba
Centro de Tecnologia
Programa de Pós-Graduação em Engenharia Mecânica
MESTRADO
CONTROLE DE POSIÇÃO DE UMA MESA DE
COORDENADAS DE DOIS GRAUS DE LIBERDADE
por
Érick Zambrano Cordeiro
Dissertação de Mestrado apresentada à Universidade Federal da Paraíba
para obtenção do grau de Mestre.
João Pessoa – Paraíba
julho de 2009
ii
ÉRCIK ZAMBRANO CORDEIRO
CONTROLE DE POSIÇÃO DE UMA MESA DE
COORDENADAS DE DOIS GRAUS DE LIBERDADE
Dissertação apresentada ao Curso de PósGraduação em Engenharia Mecânica da
Universidade
Federal
da
Paraíba,
em
cumprimento às exigências para obtenção
do Grau de Mestre.
Orientador: Prof. Dr. Paulo Henrique de Miranda Montenegro
João Pessoa – Paraíba
julho de 2009
C794c Cordeiro, Érick Zambrano.
Controle de posição de uma mesa de coordenadas de dois
graus de liberdade / Érick Zambrano Cordeiro.- João Pessoa,
2009.
206f. : il.
Orientador: Paulo Henrique de Miranda Montenegro
Dissertação (Mestrado) – UFPB/CT
1. Engenharia Mecânica. 2. Modelagem hidráulica. 3.
Controlador de Mínima Variância Generalizada(GMV). 4.
Sistema hidráulico – simulação.
UFPB/BC
CDU: 621(043)
iii
CONTROLE DE POSIÇÃO DE UMA MESA DE
COORDENADAS DE DOIS GRAUS DE LIBERDADE
por
ÉRICK ZAMBRANO CORDEIRO
Dissertação aprovada em 31 de julho de 2009.
Período letivo 2009.1.
Prof. Dr. Benedito Santana de Oliveira
Examinador Externo
Prof. Dr. José Antônio Riul – UFPB
Examinador Interno
Prof. Dr. Paulo Henrique de Miranda Montenegro – UFPB
Orientador
IFPB
João Pessoa – Paraíba
julho de 2009
iv
Aos meus pais Gileno e Lilian e
a minha esposa Ana Cláudia.
v
AGRADECIMENTOS
À minha esposa Ana Cláudia, por estar comigo em todos os desafios,
incentivando-me com muito amor, paciência e dedicação.
A toda minha família, em especial aos meus pais, Gileno e Lilian, as minhas
irmãs, Liliane e Gisele, e a minha sobrinha Carne, pelo carinho.
Aos meus sogros Sebastião e Leônia pela torcida.
Ao amigo e orientador, Prof. Dr. Paulo Henrique de Miranda Montenegro pela
confiança, orientação, incentivo e apoio.
Ao Prof. Dr. José Antônio Riul pelas valorosas contribuições prestadas ao longo
deste trabalho.
Aos membros da banca examinadora pelas sugestões fornecidas para melhoria
deste trabalho.
Ao amigo James Sidney pela amizade, constante incentivo e disposição de ajudar.
A todos os professores e funcionários do Departamento de Pós-Graduação em
Engenharia Mecânica da UFPB, que de alguma maneira contribuíram para o
desenvolvimento deste trabalho.
A todos os pesquisadores cujos trabalhos nos serviram de consulta.
vi
CONTROLE DE POSIÇÃO DE UMA MESA DE
COORDENADAS DE DOIS GRAUS DE LIBERDADE
RESUMO
Este trabalho apresenta a simulação de um sistema hidráulico de dois graus de
liberdade para posicionamento de uma carga num plano horizontal, utilizando um
controlador de Mínima Variância Generalizada (GMV) definido por ISERMANN et al
(1992). Para tal, apresentam-se as leis da física que foram utilizadas para a determinação
de um modelo matemático linear que representa, na simulação, o sistema hidráulico real
em estudo. Em seguida simula-se a identificação de um novo modelo utilizado para
projetar o controlador GMV. O sistema é composto, basicamente, por: circuito de potência,
duas válvulas do tipo carretel, dois cilindros de atuação e uma carga a ser posicionada. O
cilindro 1 movimenta a carga na direção do eixo “X” e o cilindro 2 movimenta a carga na
direção do eixo “Z”. A carga é acoplada à extremidade da haste do cilindro 2 e este
conjunto é acoplado à haste do cilindro 1. Os resultados do GMV, controlando o sistema
hidráulico de dois graus de liberdade para seguir três trajetórias de referência no plano
horizontal “XZ”, são mostrados e comentados com base nas especificações de desempenho
que o sistema deve obedecer.
Palavras-chave: Modelagem hidráulica, controlador de mínima variância generalizada,
sistema hidráulico.
vii
POSITION CONTROL OF A COORDINATES TABLE WITH TWO
DEGREES OF FREEDOM
ABSTRACT
This work presents the simulation of a hydraulic system with two degrees of
freedom used to position a load on a horizontal plane, using a Generalized Minimum
Variance controller (GMV) defined by ISERMANN et al (1992). For this, the Physics laws
used to determinate the mathematical linear model that represents the real hydraulic system
in study are presented. After, the identification of a new model is simulated, that is used to
design the GMV controller. Basically, the system is composed by: power circuit, two spool
valves, two performance cylinders and a load to be positioned. The cylinder 1 moves the
load in the “X” axis direction and the cylinder 2 moves the load in the “Z” axis direction.
The load is coupled on the rod end of the cylinder 2, and the kit coupled on the rod end of
the cylinder 1. The results obtained by GMV controlling the hydraulic system with two
degrees of freedom to follow three reference ways in “XZ” horizontal plane, are shown
and commented based on performance specifications that the system must obey.
Keywords: hydraulic molding, generalized minimum variance controller, hydraulic
system.
viii
SUMÁRIO
CAPÍTULO 1 - INTRODUÇÃO SOBRE SISTEMAS DE CONTROLE
HIDRÁULICOS ................................................................................................................ 26
1.1 INTRODUÇÃO ........................................................................................................... 26
1.2 ESTADO DA ARTE .................................................................................................... 29
1.3 ORGANIZAÇÃO DO TRABALHO ......................................................................... 38
CAPÍTULO 2 - MODELAGEM DE UM MANIPULADOR HIDRÁULICO DE DOIS
GRAUS DE LIBERDADE ................................................................................................ 40
2.1 INTRODUÇÃO ........................................................................................................... 40
2.2 SISTEMAS HIDRÁULICOS ..................................................................................... 40
2.2.1 Vantagens e limitações dos sistemas hidráulicos ................................................... 42
2.2.2 Tipos de válvulas e cilindros hidráulicos ................................................................ 43
2.3 DESCRIÇÃO DO SISTEMA ..................................................................................... 46
2.4 MODELAGEM DO SISTEMA DE ATUAÇÃO ...................................................... 47
2.4.1 Princípio da conservação de massa. Equação da continuidade............................ 49
2.4.2 Princípio da conservação de energia. Equação geral da vazão em orifícios ....... 52
2.4.3 Equação da vazão de controle na válvula............................................................... 55
2.4.4 Modelagem de cilindros de dupla ação simétricos. ............................................... 63
2.4.5 Equação do movimento para o cilindro.................................................................. 66
CAPÍTULO 3 - PROJETO DE UM CONTROLADOR GMV PARA AGIR SOBRE
UM MANIPULADOR HIDRÁULICO DE DOIS GRAUS DE LIBERDADE ........... 71
3.1 INTRODUÇÃO ........................................................................................................... 71
3.2 PARÂMETROS DO SISTEMA ................................................................................. 71
3.3 IDENTIFICAÇÃO DO SISTEMA ............................................................................ 75
3.4 PROJETO DO CONTROLADOR GMV ................................................................. 77
3.5 CONCLUSÃO.............................................................................................................. 81
ix
CAPÍTULO 4 - RESULTADOS....................................................................................... 83
4.1 INTRODUÇÃO ........................................................................................................... 83
4.2 APRESENTAÇÃO DAS TRAJETÓRIAS DE REFERÊNCIA.............................. 84
4.2.1 Apresentação da trajetória de referência polinomial cúbica seguida de degrau 84
4.2.2 Apresentação da trajetória de referência circular ................................................ 87
4.2.3 Apresentação da trajetória de referência em degraus .......................................... 89
4.3 SIMULAÇÕES ............................................................................................................ 90
4.3.1 Análise das configurações do caso 1 aplicadas à trajetória de referência
polinomial cúbica seguida de degrau ............................................................................... 91
4.3.2 Análise das configurações do caso 1 aplicadas à trajetória de referência circular
............................................................................................................................................. 95
4.3.3 Análise das configurações do caso 1 aplicadas à trajetória de referência em
degraus.............................................................................................................................. 100
4.3.4 Análise das configurações do caso 2 aplicadas à trajetória de referência em
degraus.............................................................................................................................. 104
4.3.5 Análise das configurações do caso 3 aplicadas à trajetória de referência em
degraus.............................................................................................................................. 108
4.3.6 Análise das configurações do caso 3 aplicadas à trajetória de referência
polinomial cúbica seguida de degrau ............................................................................. 112
4.3.7 Análise das configurações do caso 4 aplicadas à trajetória de referência em
degraus.............................................................................................................................. 116
4.3.8 Análise das configurações do caso 5 aplicadas à trajetória de referência em
degraus.............................................................................................................................. 121
4.3.9 Análise das configurações do caso 5 aplicadas à trajetória de referência
polinomial cúbica seguida de degrau ............................................................................. 125
4.3.10 Análise das configurações do caso 5 aplicadas à trajetória de referência
circular.............................................................................................................................. 128
4.4 CONCLUSÃO............................................................................................................ 132
CAPÍTULO 5 - CONCLUSÃO FINAL ......................................................................... 138
REFERÊNCIAS BIBLIOGRÁFICAS .......................................................................... 143
APÊNDICE A - SISTEMAS DE CONTROLE ............................................................ 149
A.1 INTRODUÇÃO ........................................................................................................ 149
A.2 DEFINIÇÕES BÁSICAS PARA O ENTENDIMENTO SOBRE CONTROLE 150
x
A.3 MODELAGEM MATEMÁTICA ........................................................................... 151
A.3.1 Tipos de modelos .................................................................................................... 152
A.3.2 Tipos de modelagem matemática ......................................................................... 153
A.3.3 Representações de modelos lineares .................................................................... 154
A.4 IDENTIFICAÇÃO DE SISTEMAS........................................................................ 160
A.4.1 Procedimentos de identificação ............................................................................ 161
A.5 ESTIMADOR DOS MÍNIMOS QUADRADOS RECURSIVO (MQR) ............. 162
A.5.1 Estimação de sistemas variantes no tempo.......................................................... 168
A.5.2 Atualização da matriz de covariância .................................................................. 169
A.5.3 Fator de esquecimento ........................................................................................... 170
A.5.4 Validação do modelo ............................................................................................. 172
A.6 CONTROLE ADAPTATIVO ................................................................................. 172
A.7 TIPOS DE CONTROLADORES ADAPTATIVOS .............................................. 174
A.7.1 Controlador de ganho tabelado ............................................................................ 174
A.7.2 Controladores adaptativos por modelo de referência (MRAC) ........................ 175
A.7.3 Controlador auto-ajustável (STR) ....................................................................... 176
A.7.4 Controlador de variância mínima generalizada (GMV).................................... 178
A.8 CONCLUSÃO ........................................................................................................... 187
APÊNDICE B - LISTAGEM DOS PROGRAMAS EM MATLAB ........................... 188
B.1 PROGRAMA PARA DETERMINAÇÃO DOS PARÂMETROS DA EQUAÇÃO
A DIFERENÇAS DO SISTEMA SIMULADO ............................................................ 188
B.2 PROGRAMA MQR EM MATLAB ........................................................................ 190
B.3 PROGRAMA EM MATLAB DO CONTROLADOR GMV PARA SEGUIR AS
TRAJETÓRIAS DE REFERÊNCIA ............................................................................. 194
xi
LISTA DE FIGURAS
Figura 1.1 – Esquema da mesa de coordenadas de dois graus de liberdade acionada
hidraulicamente para o posicionamento de uma massa M2 no plano X Z. ....... 26
Figura 1.2 – Campos de aplicação de tecnologias para automação e controle (HESSE,
2000). ................................................................................................................ 28
Figura 1.3 – Máquina à vapor de James Watt com regulador centrífugo de esferas em
destaque. ........................................................................................................... 31
Figura 1.4 – Sistema de controle de velocidade, baseado no controlador de velocidade de
James Watt (OGATA, 2003). ........................................................................... 31
Figura 2.1 – Estrutura básica de um circuito hidráulico (BOSCH, 1989) ........................... 41
Figura 2.2 – Válvula de controle tipo carretel de 4 vias. ..................................................... 44
Figura 2.3 – Válvulas direcionais tipo carretel com: (a) centro subcrítico; (b) centro crítico;
(c) centro supercrítico. ...................................................................................... 44
Figura 2.4 – Tipos de cilindros hidráulicos: (a) de simples ação; (b) de dupla ação. ......... 45
Figura 2.5 – Tipos de cilindros hidráulicos de dupla ação: (a) de haste simples; (b) de haste
dupla; (c) tandem; (d) telescópico. ................................................................... 45
Figura 2.6 – Esquema de um manipulador hidráulico com dois graus de liberdade. .......... 46
Figura 2.7 - Esquema de um atuador hidráulico genérico com carga. ................................ 48
Figura 2.8 – Volume de controle genérico. ......................................................................... 50
Figura 2.9 – Escoamento através de um orifício. ................................................................ 52
Figura 2.10 – Válvula carretel com quatro ressaltos e centro crítico na posição central. ... 55
Figura 2.11 – Movimentação da carga M de acordo com o deslocamento do carretel da
válvula: a) Carga movimentada para esquerda b) Carga movimentada para
direita. ............................................................................................................... 56
Figura 2.12 – Cilindro hidráulico de dupla ação simétrico com carga acoplada................. 64
Figura 2.13 – Diagrama de corpo livre da carga. ................................................................ 67
Figura 3.1 – Esquema de um manipulador hidráulico com dois graus de liberdade. .......... 72
xii
Figura 3.2 – Sistema com perturbação (ruído). ................................................................... 77
Figura 3.3 – Diagrama de blocos do controlador adaptativo auto-ajustável mostrando em
detalhes o sistema com ruído, o MQR e o GMV. ............................................. 80
Figura 4.1 – Exemplo de uma trajetória polinomial cúbica. ............................................... 85
Figura 4.2 – Trajetória de referência cúbica. ....................................................................... 87
Figura 4.3 – Trajetória de referência circular a ser seguida pelo sistema. .......................... 87
Figura 4.4 – Trajetória de referência co-senoidal a ser seguida pelo pistão 1. .................... 88
Figura 4.5 – Trajetória de referência senoidal a ser seguida pelo pistão 2. ......................... 89
Figura 4.6 – Trajetória de referência em degraus. ............................................................... 89
Figura 4.7 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória cúbica seguida de degrau utilizando as configurações do caso 1. ..... 92
Figura 4.8 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência cúbica seguida de degrau ao utilizar as
configurações do caso 1. ................................................................................... 93
Figura 4.9 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência cúbica
seguida de degrau, sob ação do GMV e ao utilizar a configuração do caso 1.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus
limites, quando gerada pelo GMV e ao utilizar as configurações do caso 1 para
seguir a trajetória de referência cúbica seguida de degrau. .............................. 93
Figura 4.10 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória cúbica seguida de degrau utilizando as configurações do caso 1. ..... 94
Figura 4.11 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência cúbica seguida de degrau ao utilizar as
configurações do caso 1. ................................................................................... 94
Figura 4.12 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência cúbica
seguida de degrau, sob ação do GMV e ao utilizar a configuração do caso 1.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus
limites, quando gerada pelo GMV e ao utilizar as configurações do caso 1 para
seguir a trajetória de referência cúbica seguida de degrau. .............................. 95
Figura 4.13 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória co-senoidal utilizando as configurações do caso 1............................ 96
xiii
Figura 4.14 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência co-senoidal ao utilizar as configurações do
caso 1. ............................................................................................................... 97
Figura 4.15 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência co-senoidal,
sob ação do GMV e ao utilizar a configuração do caso 1. (b) Análise da
variável de controle do eixo X, “ux(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 1 para seguir a
trajetória de referência co-senoidal. .................................................................. 97
Figura 4.16 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória senoidal utilizando as configurações do caso 1. ................................ 98
Figura 4.17 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência senoidal ao utilizar as configurações do caso
1. ....................................................................................................................... 98
Figura 4.18 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência senoidal, sob
ação do GMV e ao utilizar a configuração do caso 1. (b) Análise da variável
de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando gerada
pelo GMV e ao utilizar as configurações do caso 1 para seguir a trajetória de
referência senoidal. ........................................................................................... 99
Figura 4.19 – Resposta do sistema hidráulico seguindo a trajetória circular no plano X Z,
sob ação do controlador GMV e utilizando as configurações do caso 1. ......... 99
Figura 4.20 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória em degraus utilizando as configurações do caso 1. ......................... 101
Figura 4.21 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do
caso 1. ............................................................................................................. 101
Figura 4.22 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 1. (b) Análise da
variável de controle do eixo X, “ux(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 1 para seguir a
trajetória de referência em degraus. ................................................................ 102
Figura 4.23 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória em degraus utilizando as configurações do caso 1. ......................... 102
xiv
Figura 4.24 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do
caso 1. ............................................................................................................. 103
Figura 4.25 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 1. (b) Análise da
variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 1 para seguir a
trajetória de referência em degraus. ................................................................ 103
Figura 4.26 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória em degraus utilizando as configurações do caso 2. ......................... 105
Figura 4.27 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do
caso 2. ............................................................................................................. 105
Figura 4.28 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 2. (b) Análise da
variável de controle do eixo X, “ux(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 2 para seguir a
trajetória de referência em degraus. ................................................................ 106
Figura 4.29 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória em degraus utilizando as configurações do caso 2. ......................... 106
Figura 4.30 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do
caso 2. ............................................................................................................. 107
Figura 4.31 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 2. (b) Análise da
variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 2 para seguir a
trajetória de referência em degraus. ................................................................ 107
Figura 4.32 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória em degraus utilizando as configurações do caso 3. ......................... 109
Figura 4.33 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do
caso 3. ............................................................................................................. 110
xv
Figura 4.34 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 3. (b) Análise da
variável de controle do eixo X, “ux(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 3 para seguir a
trajetória de referência em degraus. ................................................................ 110
Figura 4.35 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória em degraus utilizando as configurações do caso 3. ......................... 111
Figura 4.36 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do
caso 3. ............................................................................................................. 111
Figura 4.37 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 3. (b) Análise da
variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 3 para seguir a
trajetória de referência em degraus. ................................................................ 112
Figura 4.38 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória cúbica seguida de degrau utilizando as configurações do caso 3. ... 113
Figura 4.39 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência cúbica seguida de degrau ao utilizar as
configurações do caso 3. ................................................................................. 114
Figura 4.40 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência cúbica
seguida de degrau, sob ação do GMV e ao utilizar a configuração do caso 3.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus
limites, quando gerada pelo GMV e ao utilizar as configurações do caso 3 para
seguir a trajetória de referência cúbica seguida de degrau. ............................ 114
Figura 4.41 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória cúbica seguida de degrau utilizando as configurações do caso 3. ... 115
Figura 4.42 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência cúbica seguida de degrau ao utilizar as
configurações do caso 3. ................................................................................. 115
Figura 4.43 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência cúbica
seguida de degrau, sob ação do GMV e ao utilizar a configuração do caso 3.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus
xvi
limites, quando gerada pelo GMV e ao utilizar as configurações do caso 3 para
seguir a trajetória de referência cúbica seguida de degrau. ............................ 116
Figura 4.44 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória em degraus utilizando as configurações do caso 4. ......................... 118
Figura 4.45 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do
caso 4. ............................................................................................................. 118
Figura 4.46 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 4. (b) Análise da
variável de controle do eixo X, “ux(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 4 para seguir a
trajetória de referência em degraus. ................................................................ 119
Figura 4.47 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória em degraus utilizando as configurações do caso 4. ......................... 119
Figura 4.48 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do
caso 4. ............................................................................................................. 120
Figura 4.49 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 4. (b) Análise da
variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 4 para seguir a
trajetória de referência em degraus. ................................................................ 120
Figura 4.50 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória em degraus utilizando as configurações do caso 5. ......................... 122
Figura 4.51 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do
caso 5. ............................................................................................................. 122
Figura 4.52 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 5. (b) Análise da
variável de controle do eixo X, “ux(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 5 para seguir a
trajetória de referência em degraus. ................................................................ 123
xvii
Figura 4.53 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória em degraus utilizando as configurações do caso 5. ......................... 123
Figura 4.54 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do
caso 5. ............................................................................................................. 124
Figura 4.55 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 5. (b) Análise da
variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 5 para seguir a
trajetória de referência em degraus. ................................................................ 124
Figura 4.56 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória cúbica seguida de degrau utilizando as configurações do caso 5. ... 125
Figura 4.57 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência cúbica seguida de degrau ao utilizar as
configurações do caso 5. ................................................................................. 126
Figura 4.58 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência cúbica
seguida de degrau, sob ação do GMV e ao utilizar a configuração do caso 5.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus
limites, quando gerada pelo GMV e ao utilizar as configurações do caso 5 para
seguir a trajetória de referência cúbica seguida de degrau. ............................ 126
Figura 4.59 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória cúbica seguida de degrau utilizando as configurações do caso 5. ... 127
Figura 4.60 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência cúbica seguida de degrau ao utilizar as
configurações do caso 5. ................................................................................. 127
Figura 4.61 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência cúbica
seguida de degrau, sob ação do GMV e ao utilizar a configuração do caso 5.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus
limites, quando gerada pelo GMV e ao utilizar as configurações do caso 5 para
seguir a trajetória de referência cúbica seguida de degrau. ............................ 128
Figura 4.62 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória co-senoidal utilizando as configurações do caso 5.......................... 129
xviii
Figura 4.63 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência co-senoidal ao utilizar as configurações do
caso 5. ............................................................................................................. 129
Figura 4.64 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência co-senoidal,
sob ação do GMV e ao utilizar a configuração do caso 5. (b) Análise da
variável de controle do eixo X, “ux(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 5 para seguir a
trajetória de referência co-senoidal. ................................................................ 130
Figura 4.65 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória senoidal utilizando as configurações do caso 5. .............................. 130
Figura 4.66 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência senoidal ao utilizar as configurações do caso
5. ..................................................................................................................... 131
Figura 4.67 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência senoidal, sob
ação do GMV e ao utilizar a configuração do caso 5. (b) Análise da variável
de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando gerada
pelo GMV e ao utilizar as configurações do caso 5 para seguir a trajetória de
referência senoidal. ......................................................................................... 131
Figura 4.68 – Resposta do sistema hidráulico seguindo a trajetória circular no plano X Z,
sob ação do controlador GMV e utilizando as configurações do caso 5. ....... 132
Figura A.1 – Sistema a ser controlado. .............................................................................. 151
Figura A.2 – Sistema de controle a malha aberta. ............................................................. 151
Figura A.3 – Sistema de controle a malha fechada. .......................................................... 151
Figura A.4 – Esquemas de identificação off-line e on-line................................................ 162
Figura A.5 – Esquema iterativo para estimação de parâmetros em tempo real................. 166
Figura A.6 – Diagrama de blocos de um sistema adaptativo. ........................................... 173
Figura A.7 – Diagrama de bloco de um sistema com ganho tabelado. ............................. 174
Figura A.8 – Estrutura com modelo de referência (MRAC). ............................................ 175
Figura A. 9 – Diagrama de blocos de um controlador auto-ajustável. .............................. 177
Figura A.10 – Controle do sistema perturbado por um ruído estocástico. ........................ 180
xix
LISTA DE TABELAS
Tabela 3.1 – Parâmetros do sistema hidráulico. .................................................................. 72
Tabela 4.1 – Valores das variáveis ajustáveis do controlador adaptativo, utilizados para
compor as configurações de cinco casos. ......................................................... 91
Tabela 4.2 – Valores das variáveis da configuração do caso 1 a serem utilizados no GMV
para que o sistema hidráulico siga a trajetórias de referências. ........................ 92
Tabela 4.3 – Valores das variáveis da configuração do caso 2 a serem utilizados no GMV
para que o sistema hidráulico siga as trajetórias de referências. .................... 104
Tabela 4.4 – Valores das variáveis da configuração do caso 3 a serem utilizados no GMV
para que o sistema hidráulico siga as trajetórias de referências. .................... 109
Tabela 4.5 – Valores das variáveis da configuração do caso 4 a serem utilizados no GMV
para que o sistema hidráulico siga as trajetórias de referências. .................... 117
Tabela 4.6 – Valores das variáveis da configuração do caso 4 a serem utilizados no GMV
para que o sistema hidráulico siga as trajetórias de referências. .................... 121
Tabela 4.7 – Resumo dos resultados da mesa de coordenadas sob ação do controlador
adaptativo do tipo GMV ao seguir as trajetórias de referência utilizando cinco
configurações distintas para o controlador. .................................................... 133
xx
LISTA DE SÍMBOLOS E ABREVIATURAS
A(.), B(.), C(.), D(.), F(.), L(.), PP(.), QQ(.) – Polinômios
A, B, C, D, Φ, Γ, Cd e Dd – Matrizes
ai, bi, ci, di, fi, l i , ppi, qqi – Parâmetros dos polinômios A(.), B(.), C(.), D(.), F(.), L(.),
PP(.), QQ(.), respectivamente
c – Coeficiente de amortecimento viscoso do pistão e da carga
Cc – Coeficiente de contração
Cl – Ganho do cilindro
Cv – Coeficiente de velocidade
d – Atraso de transporte
dc – Diâmetro do carretel da válvula
dP – Incremento de pressão
dS – Elemento de área
dV – Elemento de volume
e(.) – Representa: erro de modelagem, erro de medição ou ruído na saída do tipo
estocástico, determinístico ou offset;
E[.] – Esperança matemática
F – Força
Fp – Força perturbadora
g – Aceleração da gravidade
Gn(.) – Função de transferência do filtro do ruído
Gs(z) – Função de transferência de um sistema incluindo o segurador de ordem zero
Gx(.) – Função de transferência de malha aberta da planta responsável pelo
posicionamento da carga M2 no eixo X
Gz(.) – Função de transferência de malha aberta da planta responsável pelo
posicionamento da carga M2 no eixo Z
H(s) – Transformada de Laplace da função f(t)
xxi
h(t) – Função de transferência da resposta ao impulso no tempo
H(z) – Transformada Z de h(t)
I – Matriz identidade
I1, I2 – Função custo
J – Função do quadrado do erro a ser minimizada pelo MQR
jω – Parte imaginária da variável complexa
K(t) – Ganho do estimador
Kc – Coeficiente de vazão-pressão
Kp – Ganho do controlador proporcional
Kq – Ganho de vazão
Lc – Comprimento das câmaras 1 e 2 do cilindro hidráulico
Lf – Coeficiente de fuga
lp – Largura do pórtico da válvula
m – Magnitude dos valores iniciais da matriz de covariância
M – Massa de uma carga conectada a um atuador
M1 – Massa da carga conectada ao atuador 1
M2 – Massa da carga conectada ao atuador 2
Mp – Sobre-sinal
N – Número de medidas
n – Ordem do sistema
n(.) – Ruído branco filtrado
na, nb, nc, nd, npp, nqq – Grau dos polinômios A(.), B(.), C(.), D(.), PP(.), QQ(.),
respectivamente
P(.) – Matriz de covariância
Pc – Pressão de controle
Pd – Pressão de descarga
Pi – Pressão em diversas partes de um circuito hidráulico
Ps – Pressão de suprimento
q – Elementos da matriz Q(t)
Q(t) – Matriz diagonal semi-definida positiva
Q, Qi – Vazão nas linhas de um sistema hidráulico
Qc – Vazão de controle
Qint – Vazamento interno no cilindro
xxii
QLmáx – Máxima vazão da válvula
r – Ponderação da variável manipulada
R2 – Coeficiente de correlação múltipla
s – Operador de Laplace
S, Si – Áreas diversas
sign(u) – Função sinal
t – Tempo
tg – Instante de saída do controlador proporcional e entrada do controlador GMV
Ts – Período de amostragem
ts – Tempo de acomodação
u(.), u – Sinais de entrada de um sistema ou variável manipulada
umax – Máximo curso da válvula
U(s), Ui(s) – Transformada de Laplace de u(t)
ux, ux(.) – Variável de controle 1 ou variável manipulada 1 ou entrada 1 do sistema
uz, uz(.) – Variável de controle 2 ou variável manipulada 2 ou entrada 2 do sistema
Ux(z) – Transformada Z de ux(t)
Uz(z) – Transformada Z de uz(t)
r
v – Vetor velocidade
V1, V2 – Volume de fluido das câmaras 1 e 2 do cilindro hidráulico
Vt – Volume total do fluido
w – Sinal de referência, posição de referência
x(.) – Posição da carga M1 no eixo “X” ou saída 1 do sistema
x(t) – Função de tempo
X(s) – Transformada de Laplace de x(t)
X(z) – Transformada Z de x(t)
Y – Matriz de saída
Y(s) – Transformada de Laplace de y(t)
Y(z) – Transformada Z de y(t)
y, y(.) – Saída de um sistema, posição de uma carga
y – Média das N amostras da experimentação
y(.) – Saída estimada de um sistema
yu(.) – Sinal de saída do sistema
z – Símbolo operacional da transformada Z; zero do sistema
xxiii
z1, z2 – Cotas dos centros das seções 1 e 2 respectivamente
z(.) – Posição da carga M2 no eixo “Z” ou saída 2 do sistema
Z(s), – Transformada de Laplace de z(t)
λ – Fator de esquecimento
ψ – Ganho de adaptação
ω – Gradiente de área da válvula
ρ – Massa específica
φ – Matriz de observação
β – Módulo de elasticidade volumétrica
γ – Peso específico do fluido hidráulico
ξ – Vetor do erro e(.)
ϕ(.) – Vetor de medidas
θ(.), θ – Vetor de parâmetros do modelo
ε(t) – Erro de modelagem
υ(t) – Sinal de ruído estacionário com distribuição normal e de média nula.
σ[.] – Variância
θ MQ , θ , θ . – Vetor de parâmetros estimados
AR – Autoregressive – modelo auto-regressivo
ARIMAX – Autoregressive moving average with exogenous inputs integrated – modelo
auto-regressivo integrado de média móvel e entradas exógenas
ARIX – Autoregressive with exogenous inputs integrated – modelo auto-regressivo
integrado de entradas exógenas
ARMA – Autoregressive moving average – modelo auto-regressivo com média móvel
ARMAX – Autoregressive moving average with exogenous inputs – modelo autoregressivo com média móvel e entradas exógenas
ARX – Autoregressive with exogenous inputs – modelo auto-regressivo com entradas
exógenas
CAR – Controlled autoregressive – controlador auto-regressivo
CARIMA – Controlled autoregressive integrated moving average – controlador autoregressivo integrado com média móvel
xxiv
CARMA – Controlled autoregressive moving average – controlador auto-regressivo com
média móvel
CC – Controlador em cascata
DMV – Dahlin variância mínima
GMV – Controlador de variância mínima generalizada
GPC – Controlador preditivo generalizado
GPP – Controlador preditivo generalizado com alocação de pólos
LQG – Controlador linear quadrático gaussiano
MA – Moving average – modelo com média móvel
MIMO – Multiple input, multiple outputs – Sistema com múltiplas entradas e múltiplas
saídas
MISO – Multiple inputs, single output – Sistema com múltiplas entradas e uma saída
MIT – Esquema de gradiente para minimizar o erro ε2 no MRAC. Regra proposta por
Whitaker de MIT
MQ – Algoritmo dos mínimos quadrados
MQE – Algoritmo dos mínimos quadrados estendidos
MQG – Algoritmo dos mínimos quadrados generalizados
MQR – Algoritmo dos mínimos quadrados recursivos
MQT – Algoritmo dos mínimos quadrados totais
MQVI – Algoritmo dos mínimos quadrados das variáveis instrumentais
MRAC – Controladores adaptativos por modelo de referência
MV – Controlador de variância mínima
P – Controlador proporcional
PD – Controlador proporcional derivativo
PID – Controlador proporcional integral derivativo
SC – Superfície de controle
SEQ – Somatório do erro quadrático
SH – Sistemas hidráulicos
SIMO – Single input, multiple outputs – Sistema com única entrada e múltiplas saídas
SISO – Single input, single output – Sistema com única entrada e única saída
SM – Sistemas com motor elétrico e fuso
SP – Sistemas pneumáticos
SS – Sistemas com motor de passo
xxv
STR – Controlador auto-ajustável
VC – volume de controle
CAPÍTULO 1
- INTRODUÇÃO SOBRE SISTEMAS DE CONTROLE
HIDRÁULICOS
1.1 INTRODUÇÃO
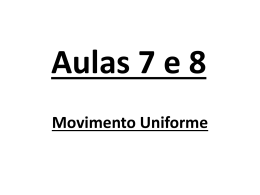
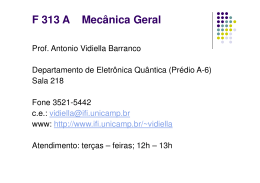
Esse trabalho tem como objetivo realizar a simulação de uma mesa de
coordenadas dois graus de liberdade acionada hidráulicamente e submetida à ação de um
Controlador de Variância Mínima Generalizada (GMV) para o posicionamento de uma
carga, de massa “M2”, no plano horizontal, obedecendo às especificações de desempenho.
O esquema do circuito hidráulico é representado pela figura 1.1.
Z
M2
M1
X
uz(t)
Cilindro Hidráulico 1
x(t)
z(t)
ux(t)
Válvula 1
Válvula 2
Cilindro
Hidráulico 2
Figura 1.1 – Esquema da mesa de coordenadas de dois graus de liberdade acionada
hidraulicamente para o posicionamento de uma massa M2 no plano X Z.
27
Os deslocamentos dos carretéis das válvulas 1 e 2 restringem e direcionam o
fluido hidráulico para uma das câmaras dos seus respectivos cilindros. A liberação do
fluido para uma das câmaras do cilindro proporciona o deslocamento do êmbolo e, por
conseqüência, o deslocamento da carga acoplada à extremidade da haste do mesmo.
Percebe-se que a carga “M1” está acoplada na extremidade da haste do pistão 1 e que a
carga “M2” está fixada na extremidade da haste do pistão 2. Observe-se também que a
carga “M2” é parte da carga “M1”, portanto pode-se dizer que o circuito 1 é responsável
pelo deslocamento e posicionamento da carga “M2” na direção do eixo “X”, e o circuito 2
é responsável pelo deslocamento e posicionamento dessa mesma carga na direção do eixo
“Z”.
Existem diversos sistemas de atuação que podem ser utilizados e vários aspectos
devem ser considerados para a escolha de tais sistemas, como: custo, condições
ambientais, mantenabilidade, confiabilidade, entre outros. Ao se levar em conta os
requisitos técnicos que o sistema será submetido, como força e velocidade de atuação,
obtêm-se uma faixa de atuação que permite escolher entre até três sistemas, como também,
pode-se obter uma faixa de atuação que restrinja a utilização para um único sistema. A
figura 1.2 apresenta campos de utilização para os seguintes sistemas: hidráulicos (SH),
com conjuntos motor elétrico e fuso (SM), pneumáticos (SP) e com motor de passo (SS).
Utilizam-se sistemas hidráulicos, basicamente, onde se faz necessário uma
elevada potência de saída, permitindo respostas rápidas e precisas.
Hoje em dia, devido ao desenvolvimento tecnológico, os sistemas hidráulicos são
aplicados em praticamente todos os ramos de atividade, desde a extração mineral até na
indústria aeroespacial. Uma listagem das principais aplicações de um sistema hidráulico é
feita a seguir, baseando-se em LINSINGEN (2003), comprovando, portanto, a importância
desse sistema para a humanidade.
Os principais campos de aplicações dos sistemas hidráulicos são: máquinas
operatrizes, máquinas injetoras, prensas hidráulicas, robôs industriais, laminadores,
controle de fornos, controle de lingotamento, comportas de represas, controladores de
turbinas, equipamentos para pontes móveis, equipamentos de mineração, equipamentos de
exploração de petróleo, máquinas de terraplanagem, máquinas agrícolas, veículos de
transporte e passeio, guindastes de convés, controladores de leme, operação de redes em
barcos de pesca, controle de aeronaves (lemes, flaps), trens de aterrissagem, simuladores
de vôo, direcionadores de foguetes, equipamentos odontológicos e hospitalares,
28
processadores de lixo urbano, oficinas e postos de serviços de veículos, manutenção de
redes elétricas, entre outros.
SM
SH
SP
1.000
1
Força de atuação em N
10.000
SS
1
1.000
Velocidade de atuação em mm/s.
10.000
Figura 1.2 – Campos de aplicação de tecnologias para automação e controle (HESSE,
2000).
Neste trabalho o sistema real a ser controlado será representado por um modelo
matemático obtido pelas leis da física (modelagem caixa branca) e, para uma maior
aproximação à realidade, será acrescida a este modelo uma perturbação na saída do sistema
para representar um ruído no sistema de medição.
O algoritmo de controle escolhido para o sistema hidráulico foi o GMV. Segundo
a literatura existente, esse tipo de controlador apresenta um bom desempenho no
rastreamento de referência e robustez frente às variações na dinâmica do sistema, às
restrições no controle e às perturbações.
Para testar a eficácia do sistema de controle sob a ação do GMV utilizam-se três
trajetórias de referência a serem seguidas pela carga “M2” do sistema hidráulico,
obedecendo algumas especificações de desempenho. Para tal, o GMV controla o sistema
hidráulico manipulando o deslocamento dos carretéis das válvulas que produz uma
restrição e direcionamento do fluxo hidráulico para uma das câmaras do pistão, com o
intuito de deslocar os êmbolos e com isto posicionar a carga “M2” no plano “XZ” de
29
maneira que esta siga uma determinada trajetória de referência. Para que erros entre o
deslocamento real da carga “M2” e a trajetória de referência sejam minimizados, medições
contínuas do posicionamento da referida carga são realizadas para realimentar o
controlador e permitir ajustes no posicionamento.
O controlador a ser utilizado é um controlador Adaptativo Auto-ajustável de
Variância Mínima Generalizada que visa minimizar uma função custo, “I2”, também
denominada de função objetivo.
I Eyk d 1 wk d 1 r · u k
(1.1)
A função custo “I2” deve minimizar a variância do desvio quadrático entre a
variável controlada “y” e o sinal de referência “w”, e ainda a parcela “r” da variância da
variável manipulada “u” que auxilia na minimização desta função.
A função custo “I2” deve minimizar a variância do desvio quadrático entre a
variável controlada “y” e o sinal de referência “w”, juntamente com o quadrado da variável
de controle “u”. A variável de controle na função custo é multiplicada por uma constante
“r” para ponderar o seu valor e auxiliar na minimização da referida função.
1.2 ESTADO DA ARTE
A hidráulica está presente na vida humana desde a mais remota antiguidade,
sendo desenvolvida, inicialmente, de maneira empírica sem maiores fundamentos. Os
primeiros conhecimentos científicos tiveram início cerca de 200 anos a.C., através de
Arquimedes que estabeleceu as leis fundamentais da Estática e da Hidrostática, tendo feito,
entre outras descobertas, o famoso princípio que leva o seu nome.
Com relação a controle, as primeiras aplicações que se tem notícia apareceram no
período entre 300 a 1 a.C., tais como: um regulador de bóia desenvolvido na Grécia, o
relógio d’água de Ktesibios e um lampião de óleo inventado por Philon que mantinha o
nível do óleo combustível constante. Ambos usavam o princípio do regulador de bóia.
Outros mecanismos de nível de água utilizando os reguladores de bóia foram publicados
por Heron de Alexandria num livro intitulado Pneumática.
No século XVII a ciência hidráulica teve progressos consideráveis com os estudos
de Simon Stevin (1548-1620), Galileu Galilei (1564-1642) e Evangelista Torricelli (1608-
30
1647). Este último enunciou o primeiro teorema da hidrodinâmica que estabelece a relação
íntima entre a carga e a velocidade de escoamento de um filete líquido através de um
orifício em parede delgada. Depois de Torricelli, o cientista francês Blaise Pascal (16231662) em 1640, completou os trabalhos de Stevin anunciando o princípio da prensa
hidráulica, denominado de princípio de Pascal, dando uma grande contribuição para o
desenvolvimento da hidrostática.
O primeiro sistema com retroação1 inventado na Europa moderna foi o regulador
de temperatura de Cornelis Drebbel (1572-1633), da Holanda. Em 1681, Dennis Papin
inventou o primeiro controlador de pressão para caldeiras a vapor (DORF e BISHOP,
2001).
No século XVIII, Daniel Bernoulli demonstrou teoricamente o teorema de
Torricelli, que estabelece uma relação entre velocidade, pressão, e a cota de nível da
molécula líquida. Daí por diante a hidráulica teve grande impulso motivado por diversos
pesquisadores. (CABEZAS, 1983).
Em 1763 o engenheiro escocês James Watt (1736-1819) desenvolveu a máquina a
vapor, permitindo que a hidrostática fosse aproveitada para a transmissão de energia
hidráulica em sistemas térmicos.
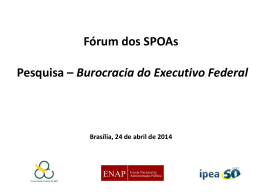
O primeiro trabalho significativo sobre controlador automático com retroação
usado em um processo industrial é o regulador de esferas de James Watt, desenvolvido em
1769 para controlar a velocidade de máquinas a vapor, figura 1.3. O sistema utilizava a
força centrífuga provocada pelo movimento de esferas para controlar a abertura de uma
válvula e, por conseqüência, a quantidade de vapor que entrava na máquina. A figura 1.4
utiliza o princípio de Watt para regular a quantidade de combustível a ser fornecida ao
motor, ajustando-se de acordo com a diferença entre a velocidade esperada e a velocidade
efetiva do motor. Tal ajuste é feito alterando-se a força centrífuga do regulador, através do
movimento da haste da válvula piloto que comanda o cilindro de potência, abrindo ou
fechando a válvula de controle, de forma a permitir que a velocidade real do motor atinja o
valor esperado.
1
Um sistema com retroação é um sistema a malha fechada que mede a sua saída real e retorna esse valor
para que seja comparado com o valor da saída desejada, usando essa diferença como meio de controle.
31
Figura 1.3 – Máquina à vapor de James Watt com regulador centrífugo de esferas em
destaque.
Disponível em: <http://www.explicatorium.com/James-Watt.php>. Acesso em: 17 ago. 2008.
Cilindro de
potência
Óleo sob
pressão
Válvula piloto
Válvula de controle
Combustível
Fechada
Aberta
Motor
Carga
Figura 1.4 – Sistema de controle de velocidade, baseado no controlador de velocidade de
James Watt (OGATA, 2003).
Em 1868 J. C. Maxwell formulou um modelo matemático baseando-se no
regulador de esferas e preocupando-se com o efeito que os vários parâmetros do sistema
32
tiveram sobre o desempenho do mesmo. Durante o mesmo período, I. A. Vyshnegradskii
formulou uma teoria matemática sobre reguladores (DORF e BISHOP, 2001).
Várias máquinas hidrostáticas e componentes de sistemas de transmissão foram
desenvolvidas por W. G. Armstrong (1810-1900) na metade do século XIX e empregados
principalmente na indústria naval, como acionamentos de âncoras e guindastes.
Um grande passo na evolução dos sistemas hidráulicos foi dado em 1900 por um
inventor amador americano Eli Janney, quando substituiu o fluido operante de água para
óleo, reduzindo os problemas relativos à lubrificação e a vazamentos. Até então a
movimentação de pistões era realizada por água sob pressão. Janney chegou também a
desenvolver uma bomba hidrostática utilizando o princípio de pistões axiais.
Elmer A. Sperry desenvolveu o giroscópio e o piloto automático, e Hele Shaw
introduziu a primeira máquina de pistões radiais utilizando óleo como fluido operante,
ambos, em 1910. No mesmo ano começaram a ser empregados os controladores
hidrostáticos de turbinas hidráulicas (LINSINGEN, 2003).
Em 1922, Minorsky demonstrou como a estabilidade poderia ser determinada a
partir de equações diferenciais que descrevem o sistema. Em 1927, H. S. Black criou o
amplificador com retroação.
Hans Thoma iniciou o desenvolvimento das máquinas de pistões axiais, em 1930.
No ano 1932, H. Nyquist elaborou o critério de estabilidade. Em 1934, Hazen
discutiu o projeto de servomecanismos a relé, capaz de acompanhar de perto uma variação
de entrada.
Harry Vickers desenvolveu uma válvula limitadora de pressão pilotada, em 1936
(LINSINGEN, 2003), dois anos depois, H. W. Bode demonstrou o diagrama logarítmico
de freqüência.
A teoria e a prática de controle, antes da Segunda Guerra Mundial,
desenvolveram-se de duas maneiras distintas, a primeira foi desenvolvida nos Estados
Unidos e no Oeste da Europa e a outra na Rússia e no Leste Europeu. A retroação nos
Estados Unidos foi incentivada pelo desenvolvimento telefônico e dos amplificadores
eletrônicos que utilizavam o domínio da freqüência. A Rússia utilizou uma formulação no
domínio do tempo usando equações diferenciais.
A necessidade de êxito na Segunda Guerra Mundial promoveu o aumento do
interesse por sistemas de controle e o desenvolvimento de novos enfoques e métodos para
projetar e construir pilotos automáticos para aviões, sistemas de posicionamento de
33
canhões, sistemas de controle para antenas de radar, entre outros sistemas militares
baseados na abordagem do controle com retroação.
Durante a década de 40, métodos de respostas de freqüência foram aperfeiçoados
permitindo que sistemas de controle linear de malha fechada satisfizessem um desempenho
requerido. Em 1948, Walter R. Evans desenvolveu plenamente o método de lugar das
raízes. Esse método é a essência da teoria clássica de controle e permitiu a determinação de
sistemas estáveis e que satisfaziam um conjunto de condições de desempenho
relativamente arbitrárias (OGATA 2003).
Na década de 50, houve um desenvolvimento em todos os segmentos da
automação industrial. Trabalhos como os de Backburn, Lee e Shearer, apresentados em
1958 nos Estados Unidos, deram grandes contribuições para o desenvolvimento dos
sistemas hidráulicos de controle contínuo. Esse novo campo da hidráulica recebeu o nome
de servo-hidráulica, separando-se da chamada hidráulica convencional. (LINSINGEN,
2003).
Ainda nos anos 50, estudos sobre controle adaptativo foram realizados
objetivando o desenvolvimento de pilotos automáticos para aeronaves, mas as restrições ao
utilizar ferramentas analógicas com controladores adaptativos, bem como a falta de uma
visão teórica e experiências negativas em testes de vôo, provocaram uma diminuição do
interesse na utilização do controle adaptativo.
De acordo com DORF e BISHOP (2001), em 1958, J. Engelberger e G. Devol
construiram o primeiro robô industrial moderno.
Grandes avanços na Teoria de Controle foram alcançados na década de 60 que
mais tarde se mostraram importantes para a concepção de sistemas de controle adaptativos,
tais como a teoria de Espaço de Estado e a da estabilidade, e ainda neste período, houve
avanços na área de estimação e identificação de sistemas, reacendendo, portanto, o
interesse sobre controladores adaptativos.
Em 1969, W. Hoff desenvolveu o microprocessador. Deste então o uso de
técnicas de controle moderno com realimentação em espaço de estado, tornou-se mais
viável.
A partir da década de 70, paralelamente ao crescimento da microeletrônica, surgiu
a válvula de controle contínuo com características construtivas pouco diferentes das servoválvulas, mas ocupando uma lacuna onde se exigia custos mais compatíveis. As vantagens
da então denominada válvula proporcional com relação as servo-válvulas, permitiu um
34
maior desenvolvimento nos sistemas de controle de malha aberta e de malha fechada, tais
como: menor exigência em termos de resposta dinâmica, maior flexibilidade com relação
ao uso em conjunto com motores lineares diferenciais e a inexistência de aparatos especiais
para controle de contaminação do fluido de trabalho.
Os sistemas hidráulicos foram se sofisticando, em paralelo ao desenvolvimento
das técnicas dos processos de fabricação, de maneira a permitir a utilização desses sistemas
em pressões cada vez mais altas e tornando-os cada vez mais compactos, precisos e
eficientes. As servo-válvulas eletro-hidráulicas exigiam processos de fabricação cada vez
mais sofisticados, além de aparatos hidráulicos e eletrônicos especiais para suprir a
necessidade de sua alta precisão e de suas respostas dinâmicas. Isso fazia com que os
custos de instalação fossem altos, restringindo o emprego dessas válvulas a sistemas
específicos. (LINSINGEN, 2003).
Com relação ao Controle Adaptativo a década de 70 também foi palco de uma
evolução impressionante, impulsionada entre outras coisas, pelo advento dos
microprocessadores. ÅSTRÖM (1970) e PETERKA (1970) apresentaram em linhas gerais
o que viria a ser o algoritmo de Variância Mínima (MV), e Åström e Wittenmark (1973)
apresentaram um algoritmo MV mais detalhado. Esse trabalho representa um marco na
evolução do controle adaptativo devido a dois teoremas que relacionam a convergência do
algoritmo de estimação com a estabilidade do sistema em malha fechada. Seguindo a
mesma filosofia, Clarke e Gawthrop (1975) e (1979) apresentaram o Controlador de
Variância Mínima Generalizada (GMV) (VAZ, 1999).
Em 1980, estudou-se amplamente o projeto de sistemas de controle robusto
utilizando como ferramenta computadores digitais como componentes de controle,
realizando cálculos rápidos e precisos, e permitindo a medição e controle simultâneo de
múltiplas variáveis; tecnologia anteriormente indisponível para os engenheiros de controle.
Entre as décadas de 60 e 80, o controle ótimo de sistemas determinísticos2 e
estocásticos3, bem como o controle adaptativo e de aprendizagem de sistemas complexos,
foram amplamente pesquisados (OGATA 2003).
Na segunda metade da década de 80, devido aos problemas originados pela crise
do petróleo e das necessidades de controle da qualidade ambiental, surgiram trabalhos que
2
3
Sistemas determinísticos. São sistemas no qual as incertezas não são modeladas de nenhuma natureza. A
saída de modelos determinísticos são números determinísticos (AGUIRRE, 2007).
Sistemas estocásticos. São sistemas no qual as incertezas são modeladas na forma de variáveis aleatórias.
Saída de modelos estocásticos são variáveis aleatórias (AGUIRRE, 2007).
35
sugeriam uma diversificação quanto ao tipo de fluido utilizado em sistemas hidráulicos,
como óleo de origem vegetal e também o retorno à água. Paralelamente a esse
desenvolvimento, observou-se o emprego de novos materiais em componentes de sistemas
hidráulicos, mostrando a continuidade da evolução tecnológica dos mesmos.
No final dos anos 80 e no início dos anos 90 surgiram novas compreensões sobre
a robustez de controladores adaptativos, através de pesquisas sobre sistemas não-lineares.
A era espacial trouxe novos estímulos para engenharia de controle incentivando o
surgimento de sistemas mais complexos, precisos e leves para mísseis, sondas espaciais e
satélites, originando com isso o controle ótimo. Métodos no domínio do tempo, para
atender essas exigências, foram desenvolvidos nas duas últimas décadas por Liapunov,
Minorsky, entre outros. Teoria de controle ótimo desenvolvidas por L. S. Pontryagin na
então União Soviética e R. Bellman nos Estados Unidos, e estudos recentes sobre sistemas
robustos, também contribuíram para o interesse em métodos no domínio do tempo (DORF
e BISHOP, 2001).
Em 1994, foram usados amplamente nos automóveis controles com retroação
(DORF e BISHOP, 2001).
ANDRIGHETTO, em 1996, estudou as válvulas proporcionais direcionais
hidráulicas, abrangendo seu princípio de operação e não linearidades típicas. Foram
analisados também, fatores importantes na seleção de válvulas proporcionais, como custo e
sensibilidade a contaminante, além de revisar os principais modelos lineares e não lineares
que descrevem o servomecanismo hidráulico, e comparar resultados experimentais com
resultados teóricos do modelo para sua validação experimental.
SANTOS, em 1998, fez um estudo comparativo entre alguns algoritmos de
controle preditivo adaptativo, com relação a diversos critérios de desempenho para
aplicação em processos práticos em escala de laboratório, além de estudos relativos a
aspectos de robustez quanto à ordem do modelo utilizado. Os controladores utilizados
nesse trabalho foram os de Variância Mínima Generalizada (GMV) propostos por Clarke,
Favier, Furuta e Lim, o GMV com alocação de Pólos, o Controlador Preditivo
Generalizado (GPC) e o Controlador Preditivo Generalizado com alocação de Pólos (GPP).
O controlador GPC destacou-se como o de melhor desempenho global mediante uma
análise qualitativa dos resultados, tanto do ponto de vista de comportamento servo como
regulatório.
36
VAZ (1999) analisou, através de simulações, as técnicas de controle para garantir
erro médio nulo em regime permanente para os controladores de Variância Mínima
Generalizada (GMV) e de Dahlin Variância Mínima (DMV), e mostrou, de maneira geral,
que este último apresenta tempos de estabilização similares com relação aos GMV, e que
os GMV apresentam índices de desempenho melhores do que os DMV. Os GMV
utilizados foram: GMV com Q incremental, GMV com Modelo CARIMA, GMV - Favier
e Hassani e GMV com Ponderação Adaptativa para Referência; os DMV utilizados foram:
DMV – Al-Chalabi e Khalill, MDMV – Vaz e Coelho e DMV – Favier e Hassani.
Vários trabalhos foram realizados visando obter um melhor controle em atuadores
hidráulicos, a exemplo de CUNHA em 1997, que apresentou um controlador em cascata
fixo, baseado no modelo não-linear do atuador hidráulico cuja referência é a estratégia de
controle em cascata proposta por GUENTHER e DE PIERI em 1997. Outros trabalhos
importantes surgiram objetivando minimizar erros em malha fechada e melhorar a robustez
do controle com relação às incertezas dos parâmetros e às perturbações, são eles:
GUENTHER e DE PIERI (1997), LOPES (1997), GUENTHER et al. (1998, 2000),
CUNHA (1997, 2001), CUNHA et al. (1997, 1998, 2000, 2002), (MACHADO, 2003).
RIUL, em 2000, apresentou uma modelagem matemática linear e uma não-linear
de um atuador hidráulico, com o objetivo de posicionar uma carga através de controladores
convencionais do tipo proporcional e proporcional-derivativo, bem como através de
controladores neurais e híbridos.
FURST, em 2001, sistematizou uma metodologia para dimensionar e analisar
estática e dinamicamente, circuitos hidráulicos em sistemas de atuação de controle de
posição em malha fechada. A metodologia proposta foi aplicada a dois circuitos
hidráulicos para controle de velocidade de turbinas em centrais hidrelétricas, através do
controle de posição de cilindros hidráulicos, tendo como objetivo principal dimensionar e
especificar corretamente uma válvula a partir de um dado atuador.
MONTENEGRO, em 2003, apresentou projetos teóricos e experimentais de
controladores convencionais dos tipos: P, PD, PID, PI-D, PID com compensador e além de
um controlador não convencional híbrido para um túnel de combustão usado em geradores
de sistemas de refrigeração por absorção.
CARMO, em 2003, desenvolveu uma modelagem matemática para expressar a
vazão dos orifícios de controle de uma válvula direcional proporcional, contemplando os
efeitos de vazamentos internos como também o fator quadrático da pressão, com vistas a
37
auxiliar de forma mais eficaz o controle de posição, força e velocidade de atuadores
hidráulicos.
Foi proposto por MACHADO, em 2003, uma modelagem matemática para um
controlador em cascata fixo que compensa o atrito não-linear, obtido através de uma rede
neural, num modelo dinâmico de um atuador hidráulico.
MEJÍA, em 2003, fez um estudo comparativo quanto à análise de estabilidade,
sintonia e desempenho das estruturas de controle multivariável centralizadas (GMV
posicional, GMV incremental, GMV PID, e PID), e descentralizadas (Boksenbom e Hood,
Zalkind e Luyben simplificado e generalizado, e Yamamoto e Shah) na abordagem do
controlador GMV, por meio de simulações e equacionamentos matemáticos e aplicados a
quatro modelos lineares e um modelo não-linear.
OLIVEIRA, em 2004, simulou a utilização de técnicas de controle preditivo
generalizado e compensadores PID, aplicadas ao posicionamento de atuadores hidráulicos,
com a finalidade de controlar a espessura de chapas de aço produzidas por um laminador
quádruo simples, levando em consideração o atraso de transporte inerente à medição de
espessura e o efeito da excentricidade devida à imperfeição dos cilindros.
Foi proposto por VALDIERO, em 2005, um controlador em cascata com
observador de atrito para controlar um robô manipulador acionado hidraulicamente. O
atrito é estimado baseado na micro-deformação das rugosidades das superfícies em
contato.
SOUZA, em 2005, elaborou um software para um sistema de projeto e controle de
posicionadores hidráulicos implementando o projeto elaborado por FURST (2001).
PEREIRA, em 2006, projetou e implementou, experimentalmente, controladores
para que um atuador hidráulico (constituído por uma válvula direcional proporcional
assimétrica e um cilindro diferencial de dupla ação) fosse capaz de seguir trajetórias. Nesse
trabalho, analisou-se a influência da dinâmica da válvula direcional proporcional no
comportamento do sistema, e no projeto e no desempenho dos controladores clássicos (P,
PI, compensador de avanço e atraso de fase e controlador de estados), do controlador
proporcional com “forward loop” e do controlador em cascata fixo (CC) com e sem
compensação do vazamento. Propôs também a inclusão de um termo na lei de controle do
controlador em cascata para compensar vazamento interno na válvula direcional
proporcional, além de analisar a influência de perturbações externas no controle de posição
e seguimento de trajetória aplicada ao atuador hidráulico.
38
Foi apresentado por MONTENEGRO em 2007, um estudo para controlar a
temperatura de um fluxo de ar em um túnel psicrométrico utilizando os seguintes
controladores adaptativos: PI de ganhos tabelados, PI auto-ajustável, MV auto-ajustável e
GPC auto-ajustável, onde este último apresentou um desempenho global superior aos
demais.
SZPAK, em 2008, apresentou um estudo teórico-experimental do comportamento
dinâmico de pressão nas câmaras de cilindros em posicionadores hidráulicos com
carregamento, visando o auxilio na escolha da combinação de válvulas simétricas e
assimétricas e atuadores hidráulicos simétricos e assimétricos.
1.3 ORGANIZAÇÃO DO TRABALHO
Essa dissertação é composta por 5 capítulos e dois apêndices, organizados como
segue.
O capítulo 2 é o responsável pela determinação do modelo matemático do da
mesa de coordenadas de dois graus de liberdade (modelagem caixa branca). Para tal, faz-se
uma introdução sobre sistemas hidráulicos, descrevendo as suas principais características e
componentes. Em seguida faz-se uma explanação sobre o sistema hidráulico a ser
controlado, informando sobre o seu funcionamento e listando seus principais componentes.
A modelagem linear do sistema hidráulico é obtida através: da equação geral da vazão em
orifícios aplicada às válvulas juntamente com uma aproximação binomial para linearizar a
equação resultante; da equação geral da continuidade aplicada ao cilindro hidráulico; e do
equilíbrio dinâmico da carga do sistema.
O capítulo 3 apresenta o projeto do controlador. Para tal são apresentadas as
especificações de desempenho que o sistema hidráulico deve obedecer quando controlado
pelo controlador auto-ajustável de mínima variância generalizada (GMV) e os valores dos
parâmetros do sistema hidráulico. Na seqüência são mostrados os procedimentos para
determinação do modelo estimado para que deste seja obtida a lei de controle do GMV.
Por fim apresenta-se o funcionamento do controlador auto-ajustável composto por um
algoritmo de identificação on-line denominado de mínimos quadrados recursivos (MQR) e
pela lei de controle do GMV.
No capítulo 4 serão apresentadas três trajetórias de referência distintas que
servirão para medir a eficiência do controlador auto-ajustável que combina a lei de
39
controle do GMV e com o MQR, ao agir no controle da mesa de coordenadas de dois graus
de liberdade. Na seqüência serão apresentadas cinco configurações utilizadas no
controlador com o objetivo de determinar uma configuração que possa ser utilizada no
controle da mesa de coordenas para que esta manipule uma carga seguindo as três
trajetórias distintas e obedecendo às especificações de desempenho pré-estabelecidas.
No capítulo 5 são apresentadas as conclusões relativas a este trabalho.
O apêndice A apresenta a teoria de controle necessária para o desenvolvimento do
Controlador de Variância Mínima Generalizada (GMV) definido por ISERMANN et al
(1992). São apresentadas definições básicas sobre a teoria de controle como também
informações necessárias para a obtenção de modelos e técnica de identificação. Em
seguida são apresentados os principais tipos de controladores adaptativos dando ênfase ao
GMV. A função custo do GMV é apresentada, bem como o desenvolvimento da respectiva
lei de controle.
O apêndice B contém a listagem dos programas em Matlab utilizados nesse
trabalho. O item B.1 apresenta o programa para converter as funções de transferências
contínuas no domínio “s” do modelo linear da mesa de coordenadas em funções
transferências discretas no domínio “z” utilizando a aproximação explícita de Euler
(segurador de ordem zero). No item B.2 é apresentado programa utilizado para execução
de um degrau no sistema em estudo com objetivo de verificar a validação do modelo
estimado utilizado no MQR. Por fim no item B.3 é apresentado o programa do controlador
auto-ajustável composto pela lei de controle do GMV e pelo algoritmo de estimação de
parâmetros MQR para controlar o sistema em estudo ao seguir três trajetórias de
referências distintas. Nesse programa estão representadas cinco configurações utilizadas no
ajuste do controlador, bem como as três trajetórias de referência. Para cada trajetória e para
cada configuração são obtidos resultados gráficos de cada um dos conjuntos que compõe a
mesa de coordenadas.
CAPÍTULO 2
- MODELAGEM DE UM MANIPULADOR HIDRÁULICO DE DOIS
GRAUS DE LIBERDADE
2.1 INTRODUÇÃO
Este capítulo tem como objetivo a determinação de um modelo matemático para
representar uma mesa de coordenadas de dois graus de liberdade. Para tal o item 2.2
apresenta uma introdução sobre a teoria de sistemas hidráulicos, em seguida, no item 2.3
descreve-se o funcionamento da mesa de coordenadas de dois graus de liberdade.
O item 2.4 apresenta as etapas de elaboração do modelo linear que representa a
mesa de coordenadas. Esse item inicia-se com as teorias necessárias para determinação da
equação da continuidade e da equação geral da vazão em orifícios que irão auxiliar a
obtenção do modelo linear do sistema. Utilizando a equação de vazão em orifícios na
válvula juntamente com uma aproximação binomial, aliada com a utilização da equação da
continuidade no cilindro hidráulico e efetuando-se o equilíbrio dinâmico da carga do
sistema obtém-se o modelo linear de um sistema hidráulico genérico, que é composto por
uma válvula, um cilindro hidráulico e uma carga. Por fim obtém-se o modelo linear da
mesa de coordenadas de dois graus de liberdade, baseando-se no modelo linear do sistema
hidráulico genérico.
2.2 SISTEMAS HIDRÁULICOS
LINSINGEN (2003) define um sistema hidráulico como sendo um conjunto de
elementos físicos convenientemente associados que, utilizando um fluido como meio de
41
transferência de energia, permite a transmissão e controle de forças e movimentos.
Portanto um sistema hidráulico é o meio através do qual uma forma de energia de entrada é
convertida e condicionada, de modo a se ter como saída energia mecânica útil.
Existem dois tipos de sistemas que operam com fluidos, são eles:
a) Os sistemas de potência empregando fluidos – nessa categoria encontram-se os
sistemas hidráulicos e pneumáticos que têm como objetivo a realização de
trabalho, obtido quando um fluido sob pressão age sobre um cilindro ou motor,
produzindo a ação mecânica desejada.
b) Os sistemas de transporte de fluidos – nessa categoria encontram-se as estações
de bombeamento para água, redes de distribuição de fluidos como o gás
industrial ou o gás residencial, entre outros, com o objetivo de transferir um
fluido de um local para outro.
Cilindro
Válvula redutora de vazão
Válvula de retenção
Circuito
de
Atuação
Válvula direcional
Válvula limitadora de pressão
Bomba
Circuito
de
Potência
Filtro
Reservatório
Figura 2.1 – Estrutura básica de um circuito hidráulico (BOSCH, 1989)
Um sistema de controle hidráulico possui basicamente os seguintes componentes:
reservatório, que é responsável pelo armazenamento do fluido, bomba para disponibilizar o
42
fluido sob pressão, válvula direcional, com a finalidade de direcionar e controlar o fluido
para um atuador, geralmente um cilindro de atuação que serve para mover cargas
mecânicas, e ainda válvula de alívio e filtro. Dependendo da aplicação a ser dada ao
sistema hidráulico, podem-se acrescentar outros tipos de componentes como, por exemplo:
sensores de medição de variáveis (como temperatura, pressão, vazão, deslocamento, etc.) e
outros tipos de válvulas. Como mostra a figura 2.1, um circuito hidráulico pode ser
subdividido em circuito de atuação e em circuito de potência.
2.2.1 Vantagens e limitações dos sistemas hidráulicos
De acordo com LINSINGEN (2003) os sistemas hidráulicos possuem
características que os tornam especialmente recomendados para uma série de aplicações,
como também algumas limitações que devem ser consideradas quando da escolha do tipo
de sistema a ser empregado, principalmente se a aplicação específica for compatível com
sistemas mecânicos, elétricos ou pneumáticos.
Vantagens dos sistemas hidráulicos de acordo com LINSINGEN (2003):
a) Transmissão de grandes forças e de torques elevados pode ser obtido utilizando
sistemas de dimensões relativamente menores;
b) Resposta rápida para partida e inversão de movimento sob carga, devido aos
baixos momentos de inércia;
c) Adaptação automática de força ou torque;
d) Possibilidade de variação contínua de força e velocidade nos atuadores lineares
e de torque e rotação nos atuadores rotativos, por meio de controle ou ajuste;
e) Adequação tanto para controle de processos, que exigem movimento rápido,
quanto para os de movimento de precisão, extremamente lentos;
f) Segurança eficaz contra sobrecargas através do uso de válvulas limitadoras de
pressão, evitando danos ao sistema;
g) Lubrificação dos componentes obtida através do próprio fluido de trabalho;
h) Capacidade de armazenamento de energia por meio de acumuladores
hidropneumáticos;
i) Possibilidade de combinação com sistemas mecânicos, elétricos e pneumáticos;
j) Possibilidade de utilização de sistemas em condições ambientais adversas.
43
Limitações dos sistemas hidráulicos de acordo com LINSINGEN (2003):
a) Custo elevado com relação aos sistemas mecânicos e elétricos compatíveis;
b) Perda de potência (baixo rendimento) devido à dissipação de energia por atrito
viscoso, limitando a velocidade do fluido e por conseqüência, a velocidade dos
atuadores hidráulicos;
c) Perdas por vazamentos internos e possibilidade de vazamentos externos,
devidos a folgas, diminuindo a eficiência dos sistemas e comprometendo a
precisão dos movimentos;
d) Exigência de utilização de sistemas especiais para sincronização de movimento
entre dois ou mais atuadores devido à compressibilidade do fluido, mesmo que
pequena, como também devido à ocorrência de vazamentos variáveis;
e) Movimentação não uniforme e pulsante nos atuadores na presença de ar. Ar
livre no sistema resulta da desaeração incompleta, absorção ou liberação de
bolhas de ar retidas em cavidades existentes nos componentes;
f) Elevada dependência da temperatura, ou seja, mudanças na temperatura
provocam alterações na viscosidade e, por conseqüência alteram-se as perdas
por vazamentos e as condições operacionais do sistema. Esses efeitos podem se
minimizados por meio de trocadores de calor ou sistemas de controle de
temperatura.
2.2.2 Tipos de válvulas e cilindros hidráulicos
Neste capítulo, será realizada a modelagem de válvulas de controle e de atuadores
hidráulicos, portanto, segundo DE NEGRI (1987) e PAIM (1997), defini-se válvula de
controle e cilindro hidráulico, como segue:
Válvula de controle: Dispositivo que converte a energia de acionamento
(normalmente de natureza elétrica ou mecânica) em energia hidráulica, amplificando os
níveis de potência. Uma válvula de controle é uma válvula direcional que pode assumir
infinitas posições e que oferece a característica adicional de controlar tanto a quantidade
como a direção de fluxo. Associando essa válvula a sensores adequados de realimentação,
consegue-se um controle preciso de um atuador no que diz respeito ao posicionamento,
velocidade e aceleração do mesmo.
44
As válvulas de controle podem ser classificadas com relação ao elemento de
acionamento (elétrico ou mecânico), com relação ao número de estágios (um, dois ou três),
com relação ao tipo de controle (carretel, bocal-defletor ou tubo-injetor) e com relação ao
número de vias (três ou quatro). O tipo de válvula escolhida para modelagem é uma
válvula de acionamento elétrico com um estágio do tipo carretel, com quatro vias e quatro
ressaltos (figura 2.2), devido a sua importância e por ter sido objeto de estudo para
diversos autores como, MERRITT (1967), DE NEGRI (1987), PAIM (1997), RIUL
(2000), LINSIGEN (2003).
Ps
Q2
Pd
u
Q1
Figura 2.2 – Válvula de controle tipo carretel de 4 vias.
Uma diferença importante entre válvulas direcionais convencionais e válvulas de
controle é o uso. Para as válvulas de controle de um carretel de centro crítico, implicando
na existência de um ponto denominado de ponto nulo, para o qual as vias são fechadas de
forma crítica, de modo que permanecem na iminência de abrir, esperando um movimento
infinitesimal do carretel para promover a ligação entre as vias. Existem ainda carretéis com
centro subcrítico e centro supercrítico, como é visto na figura 2.3.
(a)
(b)
(c)
Figura 2.3 – Válvulas direcionais tipo carretel com: (a) centro subcrítico; (b) centro crítico;
(c) centro supercrítico.
45
Cilindro Hidráulico: Também denominado de motor linear, tem a função de
converter a energia hidráulica em energia mecânica de saída (força ou torque). Dentre os
diversos tipos destacam-se os principais: cilindros de simples e duplo efeito (ou cilindros
de simples ação e os cilindros de dupla ação), como mostra a figura 2.4. Nos cilindros de
simples ação a potência hidráulica é efetiva em apenas um sentido do movimento, seja para
avanço ou para retorno da haste do cilindro e o outro sentido do movimento é realizado por
outro agente qualquer, que não o fluido hidráulico, podendo ter retorno por mola interna,
por ação da gravidade ou por uma força externa. Nos cilindros de dupla ação, o fluido
hidráulico entra em qualquer lado do cilindro, movimentando a haste em ambos os sentidos
(avanço e retorno), os tipos mais comuns são os cilindros de haste simples, de haste dupla,
tandem e o telescópico, como mostra a figura 2.5.
(a)
(b)
Figura 2.4 – Tipos de cilindros hidráulicos: (a) de simples ação; (b) de dupla ação.
(a)
(b)
(c)
(d)
Figura 2.5 – Tipos de cilindros hidráulicos de dupla ação: (a) de haste simples; (b) de haste
dupla; (c) tandem; (d) telescópico.
46
Neste trabalho será utilizado um cilindro hidráulico de dupla ação com haste
dupla e de diâmetros iguais, pois este tipo cilindro proporciona, em ambos os sentidos de
movimento, forças de atuação e velocidades iguais para pressão e vazão de suprimentos
constantes.
2.3 DESCRIÇÃO DO SISTEMA
O sistema em estudo é uma mesa de coordenadas de dois graus de liberdade
acionada hidraulicamente, indicado para controlar o posicionamento de uma carga M2 em
uma região no plano horizontal “X Z”, como mostra a figura 2.6.
Z
M1
M2
X
uz(t)
Cilindro Hidráulico 1
x(t)
z(t)
ux(t)
Válvula 2
Válvula 1
Cilindro Hidráulico 2
Figura 2.6 – Esquema de um manipulador hidráulico com dois graus de liberdade.
De acordo com seção 2.2 e a figura 2.1, um circuito hidráulico é composto por um
circuito de atuação e por um circuito de unidade de potência. Considera-se o circuito de
unidade de potência funcionando em perfeitas condições, enviando fluido através da
bomba, a uma pressão constante (pressão de suprimento – Ps) para as válvulas. Considerase também que o fluido sai das válvulas e é direcionado para um reservatório submetido à
47
pressão atmosférica (pressão de descarga – Pd), que não há saturação ou cavitação nas
linhas, que perda de carga em acessórios é desprezível e que a temperatura é constante.
O circuito de atuação é composto por dois cilindros hidráulicos e por duas
válvulas, conforme especificado anteriormente, onde cada uma delas, através do
deslocamento do carretel u(t), controla a vazão de fluido hidráulico a ser liberada para um
dos lados do seu respectivo cilindro, provocando um aumento da diferença de pressão entre
as duas câmaras de cada um dos cilindros. O êmbolo de cada cilindro se movimenta após a
diferença de pressão ter chegado a um patamar suficiente para iniciar o deslocamento da
carga acoplada à haste do pistão. Quando o êmbolo começa a se movimentar o volume da
câmara aumenta, e o preenchimento da mesma é mantido pela vazão de fluido controlada
pela válvula. O fluido introduzido é necessário para manter em movimento a carga até que
esta alcance uma posição especificada “y(t)”. Quando isso ocorre o carretel da válvula
volta para sua posição central interrompendo o fornecimento de fluido para o pistão,
mantendo na posição desejada, a carga que se encontra acoplada à haste do pistão.
O cilindro hidráulico 2 é responsável pela movimentação de uma carga de massa
“M2” no eixo “Z”, que se encontra acoplada à sua haste. O cilindro hidráulico 1 movimenta
no eixo “X”, uma carga de massa “M1” acoplada à sua haste, composta pela carga “M2”,
pelo pistão hidráulico 2 e pela válvula 2, entre outros componentes necessários para
fixação desses itens em uma base de movimentação. Em outras palavras, o cilindro
hidráulico 1 é o responsável pela movimentação da carga “M2” no eixo “X”.
2.4 MODELAGEM DO SISTEMA DE ATUAÇÃO
Como o sistema em estudo é composto por dois manipuladores independentes e
suas respectivas válvulas, inicialmente será realizada uma analise em um único conjunto
(manipulador, válvula e carga “M”, como mostra a figura 2.7) convertendo,
posteriormente, a equação obtida às condições particulares de cada atuador do sistema em
questão.
Para a modelagem de um sistema hidráulico (válvula de controle direcional e
atuador hidráulico) se faz necessário utilizar a equação da continuidade, a equação geral da
vazão em orifícios, além da segunda Lei de Newton. A equação da continuidade é obtida
através do princípio da conservação de massa ao analisar o escoamento de um fluido
através de um volume de controle genérico, sendo posteriormente aplicada à válvula em
48
estudo para obtenção da vazão de controle linearizada da mesma. A equação geral da
vazão em orifícios é obtida ao aplicar o princípio da conservação de energia em um
escoamento através de um orifício, e utilizada, em seguida, para a obtenção da vazão de
controle do cilindro hidráulico. A segunda Lei de Newton é aplicada ao cilindro hidráulico
com carga para obtenção da equação da pressão de controle. Trabalhando com as equações
da vazão de controle linearizada da válvula, da vazão de controle do cilindro hidráulico e
da pressão de controle, obtém-se o modelo linear do sistema hidráulico em estudo.
Considerando a entrada, “u(t)”, conhecida, descreve-se um modelo matemático
para relacionar a saída, “y(t)”, com a entrada, “u(t)”, com o objetivo de controlar a posição
da carga.
Fluido em alta pressão
vindo da bomba
Fluido para o
Pd reservatório
Ps
u(t)
dc
Carretel
Válvula
Q1
Q2
Êmbolo
Haste
P1
y(t)
Carga
P2
M
Cilindro
Hidráulico
V1
Lc
V2
c
Lc
Figura 2.7 - Esquema de um atuador hidráulico genérico com carga.
onde:
u(t) – Posição axial do carretel da válvula ou variável de controle;
Ps – Pressão de suprimento;
Pd – Pressão de descarga;
dc – Diâmetro do carretel da válvula;
Q1, Q2 – Vazão nas linhas 1 e 2, respectivamente;
P1, P2 – Pressão nas câmaras 1 e 2 do cilindro hidráulico;
V1, V2 – Volume de fluido das câmaras 1 e 2 do cilindro hidráulico;
49
Lc – comprimento das câmaras 1 e 2 do cilindro hidráulico;
M – Massa da carga conectada ao atuador;
y(t) – posição da carga;
c – coeficiente de amortecimento viscoso do pistão e da carga.
2.4.1 Princípio da conservação de massa. Equação da continuidade
O princípio da conservação de massa para um volume de controle qualquer
estabelece que “o fluxo líquido de massa através da superfície de controle é igual à
variação de massa no interior do volume de controle” (LINSINGEN, 2003).
Considerando-se o escoamento de um fluido através de um volume de controle de
forma arbitrária. Em princípio, a velocidade de cada partícula do fluido pode assumir
qualquer direção; desse modo, o fluxo de massa em termos vetoriais, para um elemento de
massa “ dM = ρ.dV ”, atravessando uma área elementar “dS” da superfície de controle, é “
r
& = ρ ⋅ vr ⋅ dS ” (LINSINGEN, 2003).
dM
Portanto, o princípio da conservação de massa aplicado a um volume de controle
genérico pode ser escrito, como:
r r ∂
ρ
⋅
v
⋅ dS + ∫VC ρ ⋅ dV = 0
SC
∂t
∫
(2.1)
onde:
SC – superfície de controle;
ρ – massa específica [m/v];
r
v – vetor velocidade [m/s];
dS – elemento de área [m2];
VC – volume de controle;
dV – elemento de volume [m3].
Na equação (2.1) o primeiro termo representa o fluxo de líquido de massa através
da superfície de controle, e o segundo termo representa a variação de massa no interior do
volume de controle.
50
Considerando um volume de controle genérico, representado pela figura 2.8, com
escoamento unidirecional e em regime permanente, tem-se:
ρE
r
vE
ρS
r
vS
SE
SS
Figura 2.8 – Volume de controle genérico.
onde:
ρE, ρS – massas específicas de entrada e de saída do volume de controle, respectivamente;
r r
v E , vS
– velocidades da entrada e da saída do volume de controle, respectivamente;
SE, SS – áreas da entrada e da saída do volume de controle, respectivamente.
No volume de controle generalizado representado pela figura 2.8, faz-se as
seguintes considerações: o lado esquerdo representa a entrada e o lado direito representa a
saída do volume de controle, e a normal à superfície aponta para fora do volume de
controle. Portanto, usando a equação (2.1) e substituindo na mesma o vetor velocidade pela
velocidade escalar, tem-se:
∫
SE
ρE ⋅ (− v E ) ⋅ dS + ∫S ρS ⋅ vS ⋅ dS +
S
d
(ρ ⋅ V) = 0
dt
(2.2)
Resolvendo as integrais da equação (2.2), tem-se:
− ρE ⋅ v E ⋅ SE + ρS ⋅ vS ⋅ SS +
d
(ρ⋅ V) = 0
dt
(2.3)
Como a vazão é o produto da velocidade pela área (Q = v.S), pode-se reescrever a
equação (2.3), obtendo-se:
− ρE ⋅ Q E + ρS ⋅ Q S +
d
(ρ ⋅ V) = 0 ⇒
dt
51
ρE ⋅ Q E − ρS ⋅ QS = ρ
dV
dρ
+V
dt
dt
(2.4)
Considerando que a massa é uniformemente distribuída no volume de controle, de
maneira que “ρ = ρE = ρS”, pode-se reescrever a equação (2.4), resultando em:
ρ ⋅ (QE − QS ) = ρ
Q E − QS =
dV
dρ
+V ⇒
dt
dt
dV V dρ
+
dt ρ dt
(2.5)
Segundo PAIM (1997) o termo “ dρ ρ ” da equação (2.5) é igual “ dP β ”, onde
“β” é o módulo de elasticidade volumétrica e “dP” é um incremento de pressão. A
compressibilidade de um fluido é importante em situações onde existem variações bruscas
ou elevadas de pressão.
β=
dP
dρ ρ
(2.6)
onde:
β – módulo de elasticidade volumétrica [N/m2];
P – pressão [N/m2];
ρ – massa específica [kg/m3].
Substituindo a equação (2.6) na (2.5), obtém-se:
Q E − QS =
dV V dP
+
dt β dt
A equação (2.7) representa a forma geral da equação da continuidade.
(2.7)
52
2.4.2 Princípio da conservação de energia. Equação geral da vazão em orifícios
Nesta seção será analisado o comportamento de um fluido através de um orifício
em uma canalização, que apresenta redução brusca da seção de escoamento. Através da
aplicação da equação de Bernoulli objetiva-se a obter a equação geral da vazão em
orifícios.
Tendo um orifício de canto vivo, de acordo com a figura 2.9, por onde escoa um
fluido ideal em regime permanente, verifica-se que as linhas de corrente ao passar pelo
orifício retornam gradualmente à posição horizontal, fazendo com que a menor seção de
escoamento fique situada a montante do orifício, sendo esta seção denominada de vena
contracta “S2” (seção 2).
S1
S2
S0
v2
v1
Q
z1
z2
1
0
2
3
Figura 2.9 – Escoamento através de um orifício.
A equação de Bernoulli, a seguir, informa que há conservação de energia ao longo
de um escoamento, ou seja, que há conservação entre as energias cinética, de pressão e
potencial ao longo de um duto.
v12t
v 22 t P2
P1
+ + z1 =
+ + z2
2⋅g γ
2⋅g γ
onde:
v1t, v2t – velocidades teóricas nas seções 1 e 2, respectivamente;
P1, P2 – pressões nas seções 1 e 2 respectivamente;
z1, z2 – cotas dos centros das seções 1 e 2 respectivamente;
(2.8)
53
g – aceleração da gravidade;
γ – peso específico do fluido hidráulico.
Aplicando a equação de Bernoulli entre a seção 1 do jato e a seção 2 no centro da
vena contracta e considerando uma variação de altura que não seja significativa entre os
centros das seções 1 e 2, tem-se:
v12t
2⋅g
+
2
P1 v 2 t P2
=
+
γ 2⋅g γ
(2.9)
A área do orifício de controle “S0” (seção 0) é muito menor do que a área de
entrada “S1” (seção 1) e, conseqüentemente, “S1>>S2”, resultando em uma velocidade de
entrada “v1” desprezível em relação à velocidade na vena contracta “v2”. Reescrevendo a
equação (2.9) e rearranjando em função da velocidade, após as considerações acima, temse:
2
v 22 t
P1 v 2 t P2
P −P
=
+
⇒
= 1 2 ⇒
2⋅g
γ 2⋅g γ
γ
P − P
v 22 t = 2 ⋅ g 1 2
γ
(2.10)
Sabendo que γ = ρ ⋅ g e substituindo na equação (2.10), tem-se:
v2 t =
onde:
γ – peso específico;
ρ – massa específica;
g – aceleração da gravidade.
2 ⋅ (P1 − P2 )
ρ
(2.11)
54
A velocidade real na vena contracta “v2r” menor do que a teórica “v2t”
determinada pela equação (2.11), isso se deve ao fato de que a equação de Bernoulli supõe
que o fluido é incompressível, desconsiderando as perdas por atrito. Para compensar tal
diferença utiliza-se o coeficiente de velocidade “Cv”, onde:
v 2 r = Cv ⋅ v 2 t
(2.12)
Substituindo a equação (2.11) na (2.12), para obter a velocidade real, tem-se:
v 2 r = Cv ⋅
2 ⋅ (P1 − P2 )
ρ
(2.13)
A vazão real do orifício “Q” é o produto da velocidade real na vena contracta pela
área do jato (Streeter, 1982).
Q = S2 ⋅ v 2 r
(2.14)
Substituindo a equação (2.13) na (2.14), tem-se:
Q = S2 ⋅ Cv ⋅
2 ⋅ (P1 − P2 )
ρ
(2.15)
Como a área do jato “S2” não é mensurável existe um coeficiente chamado de
coeficiente de contração “Cc” que relaciona “S2” com a área do orifício “S0” da seguinte
forma:
S2 = S0 ⋅ Cc
(2.16)
Substituindo a equação (2.16) na (2.15), tem-se:
Q = S0 ⋅ Cc ⋅ Cv ⋅
2 ⋅ (P1 − P2 )
ρ
(2.17)
55
Substituindo os coeficientes “Cc” e “Cv”, da equação (2.17), por um coeficiente
de descarga “Cd” (Cd<1), chega-se a equação geral de vazão em um orifício:
2 ⋅ (P1 − P2 )
ρ
Q = S0 ⋅ Cd ⋅
(2.18)
2.4.3 Equação da vazão de controle na válvula
A partir da equação geral da vazão em orifícios, (2.18), será determinada a
equação não-linear da vazão de controle da válvula e posteriormente a equação linearizada,
bem como os coeficientes da referida válvula.
Como visto anteriormente a válvula escolhida para modelagem é de acionamento
elétrico, com um estágio, do tipo carretel, com quatro vias, com quatro ressaltos e centro
crítico, conforme figura 2.10.
Ps
Q6
Q5
Q2
P2
Pd
Q3
u
Q4
Q1
P1
Figura 2.10 – Válvula carretel com quatro ressaltos e centro crítico na posição central.
onde:
Ps – pressão de suprimento [N/m2]
Pd – pressão de descarga [N/m2]
P1 – pressão na câmara 1 do cilindro [N/m2]
P2 – pressão na câmara 2 do cilindro [N/m2]
Q1 e Q2 – vazões nas linhas 1 e 2 respectivamente [m3/s]
56
Q3, Q4, Q5, e Q6 – vazões nos orifícios [m3/s]
O carretel da válvula pode ser deslocado da sua posição central, para direita ou
para a esquerda, de acordo com a figura 2.11. Quando o mesmo for deslocado para
esquerda, ou seja, “u ≤ 0”, a válvula permitirá que a pressão de suprimento seja conduzida
à câmara “2” do cilindro e por conseqüência a pressão de descarga fica conectada à câmara
“1” do cilindro. Sendo a pressão de suprimento maior que a de descarga, a pressão “P2” da
câmara “2” do cilindro fica maior que a pressão “P1” da câmara “1” do cilindro
provocando um aumento da diferença de pressão entre as câmaras do cilindro, denominado
de pressão de carga (Pc = P1 – P2). Esse aumento de pressão de carga provoca o surgimento
de uma força capaz de deslocar o êmbolo do pistão, movimentando conseqüentemente a
carga “M” também para a esquerda. Analogamente, ao deslocar o carretel da válvula para a
direita, ou seja, “u≥0”, a carga “M” será movimentada para a direita.
Pd
Ps
Q6
Q5 Q3
Q2
Q4
Q1
P1
Ps
u
Q6
Pd
Q5 Q3
Q3
Q2
y
P2
Q4
Q1
P1
P2
v1
v2
v1
v2
y
M
M
u
(a)
(b)
Figura 2.11 – Movimentação da carga M de acordo com o deslocamento do carretel da
válvula:
a) Carga movimentada para esquerda b) Carga movimentada para direita.
Simultaneamente ao deslocamento do carretel ocorrerá o aparecimento de uma
vazão de controle “Qc”. Analisando a figura 2.11 observa-se que quando o carretel é
deslocado para direita, “u≥0”, o fluido hidráulico passa pelos orifícios de controle 3 e 6 e
quando o carretel é deslocado para esquerda, “u≤0,” o fluido hidráulico passa pelos
orifícios de controle 4 e 5 gerando uma vazão de controle no sentido oposto.
57
A equação da vazão de controle de uma válvula é determinada a partir da análise
das vazões de cada orifício de controle da válvula (orifícios 3, 4, 5, e 6) levando em
consideração o deslocamento do carretel para esquerda ou para direita, a partir da sua
posição centralizada.
De acordo com a figura 2.10, as vazões “Q1” e “Q2” podem ser representadas por:
Q3 = Q1 + Q4
Q1 = Q3 – Q4
(2.19)
Q6 = Q2 + Q5
Q2 = Q6 – Q5
(2.20)
A partir da equação (2.18) e observando a figura 2.10 obtém-se a vazão para cada
um dos orifícios de controle.
Q3 = S3 ⋅ Cd ⋅
2 ⋅ (Ps − P1 )
ρ
(2.21)
Q 4 = S4 ⋅ Cd ⋅
2 ⋅ (P1 − Pd)
ρ
(2.22)
Q5 = S5 ⋅ Cd ⋅
2 ⋅ (Ps − P2 )
ρ
(2.23)
Q 6 = S6 ⋅ Cd ⋅
2 ⋅ (P2 − Pd)
ρ
(2.24)
Nas válvulas de controle tipo carretel de centro crítico os vazamentos “Q4” e “Q5”
ocorrem devido às imperfeições geométricas e às folgas entre os carretéis e seus pórticos
(PAIM, 1997).
Considera-se que os orifícios das válvulas são iguais e simétricos. Com estas
considerações e analisando a válvula quando o seu carretel é deslocado para direita ou para
esquerda, tem-se:
Quando o carretel é deslocado para direita, ou seja, “u≥0”, considera-se:
Q4 = Q5 = 0
(2.25)
58
Quando o carretel é deslocado para esquerda, ou seja, “u≤0”, considera-se:
Q3 = Q6 = 0
(2.26)
Considerando a igualdade entre os orifícios, obtém-se:
S3(u) = S6(u)
(2.27)
S4(u) = S5(u)
(2.28)
Considerando a simetria entre os orifícios, obtém-se:
S3(u) = S5(–u)
(2.29)
S4(u) = S6(–u)
(2.30)
Considerando o emprego de pórticos retangulares, pode-se escrever a área, como:
S(u) = lp . u
(2.31)
onde:
lp – largura do pórtico (igual ao perímetro da camisa da válvula ou uma fração deste).
S3, S4, S5 e S6 – áreas dos orifícios 3, 4, 5 e 6, respectivamente.
Para “u ≥ 0” e a partir das considerações anteriores, substituem-se as equações
(2.21) e (2.25) na equação (2.19) obtendo-se a equação (2.32) e, substituindo-se as
equações (2.24) e (2.25) na equação (2.20) obtém-se a equação (2.33).
Q1 = Q3 = S3 ⋅ Cd ⋅
2 ⋅ (Ps − P1 )
ρ
(2.32)
Q 2 = Q 6 = S6 ⋅ Cd ⋅
2 ⋅ (P2 − Pd )
ρ
(2.33)
59
Para “u ≤ 0”, e a partir das considerações anteriores, substituem-se as equações
(2.22) e (2.26) na equação (2.19) obtendo-se a equação (2.34) e, substituindo-se as
equações (2.23) e (2.26) na equação (2.20) obtém-se a equação (2.35).
Q1 = −Q 4 = −S4 ⋅ Cd ⋅
2 ⋅ (P1 − Pd)
ρ
(2.34)
Q 2 = − Q 5 = −S5 ⋅ Cd ⋅
2 ⋅ (Ps − P2 )
ρ
(2.35)
Assumindo: “Q1 = Q2”, a pressão de suprimento “Ps” constante, a pressão de
descarga “Pd” nula e que “S3 = S4 = S5 =S6 = S”, obtém-se das equações (2.32) e (2.33) ou
das equações (2.34) e (2.35) (RIUL, 2000), o seguinte:
Ps = P1 + P2
(2.36)
Observando a figura 2.10, e pela definição de MERRITT (1967) a pressão de
controle ou pressão na carga “Pc [N/m2]”, é:
Pc = P1 – P2
(2.37)
Manipulando as equações (2.36) e (2.37), obtém-se:
P1 =
Ps + Pc
2
(2.38)
P2 =
Ps − Pc
2
(2.39)
Considerando o deslocamento do carretel da válvula para direita (u ≥ 0), e
substituindo a equação (2.38) na equação (2.32), obtém-se a equação (2.40). E ainda
substituindo a equação (2.39) na equação (2.33), obtém-se a equação (2.41), sabendo que
“Pd = 0”.
60
Q1 = S ⋅ Cd ⋅
Q 2 = S ⋅ Cd ⋅
Ps + Pc
2
Ps − Pc
⇒ Q1 = S ⋅ Cd ⋅
Ps −
2
ρ
ρ
(2.40)
2 Ps − Pc
Ps − Pc
− 0 ⇒ Q 2 = S ⋅ Cd ⋅
ρ 2
ρ
(2.41)
Das equações (2.40) e (2.41), obtém-se:
Qc = Q1 = Q 2 = S ⋅ Cd ⋅
Ps − Pc
ρ
(2.42)
onde: Qc – vazão de controle [m/s3].
Considerando o deslocamento do carretel da válvula para esquerda (u ≤ 0), e
substituindo a equação (2.38) na equação (2.34), obtém-se a equação (2.43). E ainda
substituindo a equação (2.39) na equação (2.35), obtém-se a equação (2.44), sabendo que
“Pd = 0”.
Q1 = −S ⋅ Cd ⋅
Q 2 = −S ⋅ Cd ⋅
2 Ps + Pc
Ps + Pc
− 0 ⇒ Q1 = −S ⋅ Cd ⋅
ρ 2
ρ
(2.43)
Ps − Pc
2
Ps + Pc
⇒ Q 2 = −S ⋅ Cd ⋅
Ps −
2
ρ
ρ
(2.44)
Das equações (2.43) e (2.44), obtém-se:
Qc = Q1 = Q 2 = −S ⋅ Cd ⋅
Ps + Pc
ρ
(2.45)
A partir das equações (2.42) e (2.45), obtém-se a equação da vazão de controle
não linear de uma válvula de carretel de quatro vias, para qualquer lado que o carretel da
válvula se desloque, ou seja, para “u ≥ 0” ou para “u ≤ 0.
61
Qc =
S
1
u
Ps − Pc
⋅ u ⋅ Cd ⋅
u
ρ
u
(2.46)
onde: ω = S u – gradiente de área da válvula [m2/m].
Reescrevendo a equação (2.46), obtém-se a equação da vazão que apresenta
relação não-linear entre vazão e pressão:
Qc = u ⋅ ω ⋅ Cd ⋅
1
u
⋅ Ps − Pc
u
ρ
(2.47)
A equação (2.47) pode ser simplificada, obtendo-se:
Qc = Cl ⋅ u Ps − sign ( u ) ⋅ Pc
(2.48)
sendo:
Cl = ω ⋅ Cd ⋅
1
ρ
(2.49)
onde:
sign(u) – função sinal
sign(u) = { 1 para u>0; 0 para u=0; -1 para u>0}
A linearização da equação (2.47) será realizada através de uma aproximação
binomial (RIUL, 2000), como segue:
Ps −
u
u Pc
u Pc
Pc = Ps ⋅ 1 −
≅ Ps ⋅ 1 −
u
u Ps
u 2 Ps
Substituindo a equação (2.50) na (2.47), tem-se:
(2.50)
62
Qc = u ⋅ ω ⋅ Cd ⋅
Ps
ρ
u Pc
⋅ 1 −
u 2Ps
(2.51)
Considerando a formação anelar de um orifício quando o carretel da válvula sofre
um deslocamento de “u”, (RIUL, 2000), tem-se:
ω=
π ⋅ dc ⋅ u
u
(2.52)
onde:
dc – diâmetro do carretel da válvula [m];
u – deslocamento axial da válvula [m].
Substituindo a equação (2.52) na equação (2.51), tem-se:
Qc = u ⋅ π ⋅ dc ⋅ Cd ⋅
Ps u Pc
⇒
⋅ 1 −
ρ u 2Ps
Ps
u 1 Ps
Qc = π ⋅ dc ⋅ Cd ⋅
⋅ u − u ⋅ π ⋅ dc ⋅ Cd ⋅ ⋅
⋅ Pc ⇒
u 2Ps ρ
ρ
Qc = Kq⋅ u − Kc⋅ Pc
(2.53)
A equação (2.53) representa a equação linearizada da vazão de controle da válvula
em estudo, e mostra que a vazão de controle depende do deslocamento axial “u” do carretel
da válvula e da pressão de controle “Pc”. Sendo:
Kq = π ⋅ dc ⋅ Cd ⋅
Ps
ρ
(2.54)
Onde o ganho de vazão “Kq” [m2/s] varia com o diâmetro da válvula “dc”, com o
coeficiente de descarga “Cd”, com a pressão de suprimento “Ps” e com a massa específica
do fluido “ρ”.
63
Kc = ⋅π ⋅ dc ⋅ Cd ⋅ u ⋅
u 1
⋅
u 2 Ps
Ps
ρ
(2.55)
O coeficiente de vazão-pressão “Kc” [m5/Ns] além de variar com os mesmos
parâmetros do ganho de vazão varia também com o deslocamento “u” do carretel da
válvula.
De acordo com RIUL (2000) a equação da vazão linearizada utilizando a
aproximação binomial tem um erro menor do que 10%, pois na prática “Pc” raramente
excede “2/3” de “Ps”.
Os coeficientes da válvula, “Kq” e “Kc” representados pelas equações (2.54) e
(2.55), respectivamente, podem ser reescritos, como segue:
Kq = π ⋅ dc ⋅ Cd ⋅ 10 5 ⋅
Kc = ⋅π ⋅ dc ⋅ Cd ⋅ u ⋅
Ps
ρ
(2.56)
u 1
105
Ps
⋅
⋅
5 ⋅
u 2Ps 10
ρ
(2.57)
2.4.4 Modelagem de cilindros de dupla ação simétricos.
A modelagem de cilindros hidráulicos é baseada na equação da continuidade e na
equação de movimento.
A figura 2.12 representa os principais parâmetros e variáveis necessários para a
modelagem comportamental de cilindros hidráulicos simétricos de dupla ação.
Q1
Q2
y
Fp
P1
Qint
P2
M
S
V1
Lc
S
Lc
V2
c
64
Figura 2.12 – Cilindro hidráulico de dupla ação simétrico com carga acoplada.
Aplicando a forma geral da equação da continuidade, equação (2.7), em cada uma
das câmaras do cilindro representado pela figura 2.12, e considerando cada câmara como
um volume de controle genérico, obtém-se:
Q1 − Q int =
Qint − Q 2 =
dV1 V1 dP1
+
⇒
dt
β dt
Q1 = Qint +
dV1 V1 dP1
+
dt
β dt
(2.58)
dV2 V2 dP2
+
⇒
dt
β dt
Q 2 = Q int −
dV2 V2 dP2
−
dt
β dt
(2.59)
onde:
Q1, Q2 – vazão nos orifícios 1 e 2 do cilindro, respectivamente [m3/s];
Qint – vazamento interno no cilindro [m3/s];
V1, V2 – volumes de fluidos nas câmaras 1 e 2 do cilindro, respectivamente [m3];
P1, P2 – pressões nas câmaras 1 e 2, respectivamente [N/m2];
β – módulo de elasticidade do fluido [N/m2].
Os volumes das câmaras do cilindro podem ser expressos a partir da posição
central do êmbolo, adicionando sua variação de posição, ou seja:
V1 = S ⋅ Lc + S ⋅ y
(2.60)
V2 = S ⋅ Lc − S ⋅ y
(2.61)
onde:
Lc – comprimento de cada câmara do cilindro [m];
S – área útil do êmbolo [m2];
y – deslocamento do êmbolo ou da carga [m].
Derivando as equações (2.60) e (2.61), tem-se:
65
dV1
dy
=S
dt
dt
(2.62)
dV2
dy
= −S
dt
dt
(2.63)
Substituindo a equação (2.62) na equação (2.58), obtém-se a equação (2.64),
assim como ao substituir a equação (2.63) na equação (2.59), obtém-se a equação (2.65):
Q1 = Qint + S
Q2 = Qint + S
dy V1 dP1
+
⇒
dt β dt
dy V2 dP2
−
⇒
dt β dt
dP1
dy β
= Q1 − Qint − S
dt
dt V1
(2.64)
dP2
dy β
= −Q2 − Qint − S
dt
dt V2
(2.65)
Pela equação (2.45) “Q1 = Q2 = Qc” e para o êmbolo na posição central do
cilindro tem-se que “V1 = V2 = Vt/2”, portanto, reescrevendo as equações (2.64) e (2.65)
(RIUL, 2000), tem-se:
dP1
dy 2β
= Qc − Qint − S
dt
dt Vt
(2.66)
dP2
dy 2β
= − Qc − Qint − S
dt
dt Vt
(2.67)
Reescrevendo a equação (2.37), tem-se:
Pc = P1 – P2
(2.68)
Derivando a equação (2.68), tem-se:
dPc dP1 dP2
=
−
dt
dt
dt
Substituindo as equações (2.66) e (2.67) na equação (2.69), obtém-se:
(2.69)
66
dPc
dy 2β
dy 2β
= Qc − Qint − S + Qc − Qint − S
⇒
dt
dt Vt
dt Vt
dPc
dy 4β
= Qc − Qint − S ⇒
dt
dt Vt
Qc =
dPc Vt
dy
+ S + Q int
dt 4β
dt
(2.70)
(2.71)
O vazamento interno “Qint” é expresso como uma função linear da diferença de
pressão entre as câmaras dos cilindros, ou seja:
Qint = Lf ⋅ (P1 − P2 )
(2.72)
onde: Lf – coeficiente de fuga [m5/Ns]
Substituindo a equação (2.68) na (2.72), tem-se:
Qint = Lf ⋅ Pc
(2.73)
Substituindo a equação (2.73) na (2.71), obtém-se a equação da vazão de controle
para um cilindro hidráulico simétrico:
Qc =
dPc Vt
dy
+ S + Lf ⋅ Pc
dt 4β
dt
(2.74)
2.4.5 Equação do movimento para o cilindro
O êmbolo do cilindro movimenta uma carga constituída por uma massa e por
atrito viscoso. Portanto, a força desenvolvida pelo êmbolo é aplicada à massa da carga e ao
atrito (OGATA, 2003).
Observando a figura 2.12, constrói-se o diagrama de corpo livre, conforme figura
2.13, e faz-se o equilíbrio dinâmico da carga.
67
c
F
M
dy
dt
M
d2y
dt 2
y
Figura 2.13 – Diagrama de corpo livre da carga.
onde:
F – força que o pistão exerce na carga [N];
c – coeficiente de amortecimento viscoso do pistão e da carga [Ns/m];
y – posição da carga [m];
M – massa da carga [kg];
−c
dy
– força de atrito atuante na carga [N];
dt
−M
d2y
– força de inércia da carga [N].
dt 2
Analisando a figura 2.13, o equilíbrio dinâmico das forças é:
dy
d2y
F−c −M 2 = 0
dt
dt
(2.75)
Sabendo que a força “F” é função da área do êmbolo do pistão e da pressão de
controle do cilindro, tem-se:
F = S ⋅ Pc
(2.76)
Substituindo a equação (2.76) na (2.75) e reorganizando-a, obtém-se:
dy
d2y
S ⋅ Pc − c − M 2 = 0 ⇒
dt
dt
c dy M d 2 y
Pc =
+
S dt S dt 2
(2.77)
68
Igualando a equação de vazão de controle da válvula (2.53) com a de vazão de
controle do cilindro (2.74), obtém-se:
Kq ⋅ u − Kc ⋅ Pc =
dPc Vt
dy
+ S + Lf ⋅ Pc
dt 4β
dt
(2.78)
Aplicando a transformada de Laplace nas equações (2.77) e (2.78), e considerando
as condições iniciais nulas, obtêm-se, respectivamente, as equações (2.79) e (2.80):
Pc (s) =
c
M
⋅ s ⋅ Y(s) + ⋅ s 2 ⋅ Y(s) ⇒
S
S
Kq ⋅ U(s) − Kc ⋅ Pc (s) =
c
M
Pc (s) = ⋅ s + ⋅ s 2 ⋅ Y(s)
S
S
(2.79)
Vt
⋅ s ⋅ Pc (s) + S ⋅ s ⋅ Y(s) + Lf ⋅ Pc (s) ⇒
4β
Pc (s) =
Kq ⋅ U(s) − S ⋅ s ⋅ Y(s)
Vt
⋅ s + Kc + Lf
4β
(2.80)
Igualando as equações (2.79) e (2.80), obtém-se:
c
M
Kq ⋅ U(s) − S ⋅ s ⋅ Y(s)
⋅ s + ⋅ s 2 ⋅ Y(s) =
⇒
Vt
S
S
⋅ s + Kc + Lf
4β
c
M
S
⋅
s
Kq ⋅ U (s)
⋅ s + ⋅ s2 +
⋅ Y (s ) =
⇒
Vt
Vt
S
S
⋅ s + Kc + Lf
⋅ s + Kc + Lf
4β
4β
Kq
Vt
⋅ s + Kc + Lf
Y (s)
4β
=
⇒
Vt
Vt
U (s)
c⋅
⋅ s 2 + c ⋅ Kc ⋅ s + c ⋅ Lf ⋅ s + M ⋅
⋅ s 3 + M ⋅ Kc ⋅ s 2 + M ⋅ Lf ⋅ s 2 + S2 ⋅ s
4β
4β
Vt
S ⋅ ⋅ s + Kc + Lf
4β
69
Y(s)
=
U(s)
Kq ⋅ S
Vt
Vt
s ⋅ M ⋅ ⋅ s 2 + M ⋅ Lf + M ⋅ Kc + c ⋅ ⋅ s + (S2 + c ⋅ Lf + c ⋅ Kc)
4β
4β
Y (s)
=
U (s)
×
1 S2
⇒
1 S2
Kq
S
(2.81)
M Vt 2 M
c Vt
c
c
s ⋅ 2 ⋅ ⋅ s + 2 Lf + Kc + ⋅ ⋅ s + 1 + 2 ⋅ Lf + 2 ⋅ Kc
S
S
M 4β
S
S 4β
Dividindo
o
numerador
e
o
denominador
da
equação
(2.81)
por
c
c
1 + 2 ⋅ Lf + 2 ⋅ Kc , obtém-se:
S
S
Y (s)
=
U (s)
(Kq ⋅ S)
(S2 + c ⋅ Lf + c ⋅ Kc)
c ⋅ Vt
M ⋅ Lf + M ⋅ Kc +
M ⋅ Vt
4
β
3
⋅ s2 + s
⋅s +
2
2
4β ⋅ (S + c ⋅ Lf + c ⋅ Kc)
S + c ⋅ Lf + c ⋅ Kc
(2.82)
A equação (2.82) representa o modelo linear do sistema hidráulico de
posicionamento, na forma de função de transferência, composto por uma válvula de
controle e por um atuador hidráulico simétrico com carga.
No sistema em estudo está sendo considerada a utilização de dois conjuntos
idênticos de atuadores hidráulicos, diferenciando apenas a massa da carga a ser
transportada. Por tanto, baseando-se na equação (2.82) e analisando a figura 2.6 podemos
obter as equações que representam o modelo linear da mesa de coordenadas de dois graus
de liberdade e acionada hidraulicamente, na forma de função de transferência, como se
segue:
X(s)
=
U x (s)
kq ⋅ S
S + c ⋅ Lf + c ⋅ Kc
Vt.c
M1 ⋅ Lf + M1 ⋅ Kc +
3
Vt ⋅ M1
4⋅β 2
⋅ s +
⋅s + s
2
2
4β ⋅ (S + c ⋅ Lf + c ⋅ Kc)
S + c ⋅ Lf + c ⋅ Kc
2
(2.83)
70
Z(s)
=
U z (s)
kq ⋅ S
S + c ⋅ Lf + c ⋅ Kc
Vt ⋅ c
M 2 ⋅ Lf + M 2 ⋅ Kc +
3
Vt ⋅ M 2
4⋅β 2
⋅s +
⋅s + s
2
S2 + c ⋅ Lf + c ⋅ Kc
4β ⋅ (S + c ⋅ Lf + c ⋅ Kc)
2
onde:
X(s), Z(s) – É a transformada de Laplace de x(t) e de z(t), respectivamente;
Ux(s), Uz(s) – É a transformada de Laplace de ux(t) e de uz(t), respectivamente;
Kq – Ganho de vazão;
S – Área útil do êmbolo;
c – Coeficiente de amortecimento viscoso do pistão e da carga.
Lf – Coeficiente de fuga;
Kc – Coeficiente de vazão-pressão;
Vt – Volume total;
M1 – Massa da carga acoplada à extremidade da haste do cilindro hidráulico 1;
M2 – Massa da carga acoplada à extremidade da haste do cilindro hidráulico 2;
β – Módulo de elasticidade do fluido;
s – Operador de Laplace.
(2.84)
CAPÍTULO 3
- PROJETO DE UM CONTROLADOR GMV PARA AGIR SOBRE UM
MANIPULADOR HIDRÁULICO DE DOIS GRAUS DE LIBERDADE
3.1 INTRODUÇÃO
Este capítulo tem como objetivo mostrar os passos do desenvolvimento do projeto
do controlador adaptativo do tipo auto-ajustável utilizando o algoritmo de estimação de
parâmetros dos mínimos quadrados recursivos (MQR) e a lei de controle de mínima
variância generalizada (GMV) para controlar uma mesa de coordenadas de dois graus de
liberdade acionada hidraulicamente.
A seção 3.2 apresenta os parâmetros do sistema com o intuito de determinar o
modelo analítico do manipulador e suas respectivas equações a diferenças. A seção 3.3
apresenta os modelos estimados a serem utilizados no MQR bem como a validação dos
mesmos. A seção 3.4 apresenta a descrição do projeto do controlador GMV para a
obtenção da sua respectiva lei de controle.
3.2 PARÂMETROS DO SISTEMA
O sistema hidráulico de dois graus de liberdade representado pela figura 3.1 tem
finalidade de controlar o posicionamento da carga “M2” no plano “XZ”.
Os parâmetros do sistema hidráulico em estudo se baseiam nos parâmetros de um
sistema hidráulico com carga do trabalho de RIUL (2000), mostrados na tabela 3.1.
72
z
M1
M2
x
Cilindro Hidráulico 1
x(t)
z(t)
ux(t)
uz(t)
Válvula 2
Válvula 1
Cilindro Hidráulico 2
Figura 3.1 – Esquema de um manipulador hidráulico com dois graus de liberdade.
Tabela 3.1 – Parâmetros do sistema hidráulico.
Parâmetros
Módulo de elasticidade volumétrico:β [N/m2]
Massa: M1 e M2 [kg]
Coeficiente de atrito: c [Ns/m]
Mínimo
Máximo
Nominal
8
8
9,0x10
16,0x10
14,0x108
50,0
300,0
M1=150
M2=100
50,0
564,0
163,0
3
0,874x10-3
Volume total de fluido: Vt [m ]
Área do pistão: S [m2]
Força perturbadora: Fp [N]
1,05x10-3
1,11x10-3
1,075x10-3
0
8,0x103
0
3
Máxima vazão da válvula: QLmax [m /s]
8,66x10
-4
Pressão de suprimento: Ps [N/m2]
Coeficiente de vazão-pressão: Kc [m5/Ns]
Ganho de vazão: Kq [m2/s]
Máximo curso da válvula: umax [m]
Comprimento do cilindro: Lc [m]
Ganho: C1 [(m5/kg)1/2 ]
Coeficiente de fuga: Lf [m5/Ns]
6,9x106
1,0x10-14
1,5x10-10
2,4x10-12
0,73
1,2x10-3
0,8
2,8x10-4
0
73
A dinâmica do modelo linear do atuador hidráulico de dois graus de liberdade é
representada pelas funções de transferência de malha aberta, definidas pelas equações
(2.83) e (2.84). Utilizando os dados da tabela 3.1 e substituindo na equação (2.83), obtémse:
kq ⋅ S
= 678,84
S + c ⋅ Lf + c ⋅ Kc
2
Vt ⋅ M1
= 2,025x10-5
4β(S + c ⋅ Lf + c ⋅ Kc)
2
Vt ⋅ c
4⋅β
= 3,334x10-4
2
A + c ⋅ Lf + c ⋅ Kc
M1 ⋅ Lf + M1 ⋅ Kc +
ou seja:
Gx (s) =
678,84
2,025 × 10 ⋅ s + 3,334 × 10 − 4 ⋅ s 2 + s
−5
3
(3.1)
A equação (3.1) representa a função de transferência em malha aberta da planta,
responsável pelo o posicionamento das cargas “M1” e por conseqüência, “M2” no eixo
“X”.
Substituindo os dados da tabela 3.1, na equação (2.84), obtém-se:
kq ⋅ S
= 678,84
S + c ⋅ Lf + c ⋅ Kc
2
Vt ⋅ M 2
= 1,35x10-5
4β(S + c ⋅ Lf + c ⋅ Kc)
2
Vt ⋅ c
4⋅β
= 2,296x10-4
2
S + c ⋅ Lf + c ⋅ Kc
M 2 ⋅ Lf + M 2 ⋅ Kc +
ou seja:
74
Gz(s) =
678,84
1,35 × 10 ⋅ s + 2,296 × 10−4 ⋅ s 2 + s
−5
3
(3.2)
A equação (3.2) representa a função de transferência em malha aberta da planta,
responsável pelo posicionamento da carga “M2” no eixo “Z”.
Através do programa em Matlab listado no item B.1 do apêndice B, que utiliza um
período de amostragem de 10ms e um segurador de ordem zero – ZOH (Zero-Order Hold)
obtém-se as equações (3.3) e (3.4) que representam as funções de transferência discretas do
sistema, correspondentes as equações (3.1) e (3.2), respectivamente.
4,201⋅ z −1 + 12,07 ⋅ z −2 + 3,841⋅ z −3
Gx(z) =
1 + 0,1145⋅ z −1 − 0,2663⋅ z −2 − 0,8482⋅ z −3
(3.3)
5,566 ⋅ z −1 + 13,27 ⋅ z −2 + 5,053⋅ z −3
Gz(z) =
1 + 0,6763⋅ z −1 − 0,8327 ⋅ z −2 − 0,8436⋅ z −3
(3.4)
As equações do sistema podem ser escritas de maneira a relacionar a entrada com
a saída utilizando as expressões abaixo:
Xz=Gxz·Ux z+ez
Zz=Gzz·Uz z+ez
(3.5)
(3.6)
onde:
X(z), Z(z) – sinal de saída discretizado na direção do eixo X e na direção do eixo Z,
respectivamente;
Gx(z), Gz(z) – função de transferência incluindo o segurador de ordem zero responsável
pelo deslocamento do sistema na direção no eixo X e na direção do eixo Z,
respectivamente;
Ux(z), Uz(z) – sinal de controle discretizado do sistema para o eixo X e para o eixo Z,
respectivamente;
e(z) – perturbação na saída do sistema.
Observando as equações (3.5) e (3.6) verifica-se que foi acrescido uma
perturbação na saída do sistema com o objetivo de aproximar a simulação à realidade. A
75
perturbação acrescida “e(z)” é do tipo ruído branco (ruído Gaussiano) com média nula e
variância de 0,05x10 -3, representando um ruído no sistema de medição.
Colocando a equação (3.3) e no formato da equação (3.5) e a equação (3.4) no
formato da equação (3.6), obtém-se respectivamente as equações (3.7) e (3.8) que
representam o sistema em estudo na forma de equação à diferenças.
xt=4,201·ux t-1+12,07 ux t-2+3,841ux t-3-0,1145xt-1+
+0,2663xt-2+0,8482xt-3+et
zt=5,566·uz t-1+13,27 uz t-2+5,053uz t-3-0,6763zt-1+
+0,8327zt-2+0,8463zt-3+et
(3.7)
(3.8)
3.3 IDENTIFICAÇÃO DO SISTEMA
O objetivo da identificação do sistema é obter um modelo matemático que
descreva o comportamento de um sistema dinâmico a partir de suas entradas e saídas.
Neste trabalho, através das equações à diferenças (3.7) e (3.8) obtém-se as
respostas “x(t)” e “z(t)” para as entradas ux(t) e uz(t) respectivamente; que serão utilizadas
para identificação dos parâmetros do sistema, necessários para o projeto do controlador
adaptativo. A identificação do sistema é feita on-line através do algoritmo dos Mínimos
Quadrados Recursivos (MQR), apresentado na seção A.5. O programa em Matlab do MQR
está listado no item B.2 do apêndice B.
Tendo conhecimento a priori do sistema, e por este trabalho tratar-se de uma
simulação, e a partir do princípio da parcimônia, optou-se por utilizar um modelo a ser
estimado de ordem inferior ao do modelo considerado como real. Tal procedimento vem
auxiliar o controlador adaptativo agilizando a identificação dos seus parâmetros e a
atualização da lei de controle em tempo real.
O modelo adotado será de segunda ordem, uma ordem inferior ao do modelo que
representa o processo real (equações (3.3) e (3.4)), ou seja, o modelo estimado do sistema
terá o grau dos polinômios “A” e “B”, respectivamente “na=2” e “nb=1” e um atraso de
transporte “d=1”, conforme descrito pelas equações (3.9) e (3.10).
X(z)
b̂1x ⋅ z −1 + b̂ 2 x ⋅ z −2
= Gx ( z ) =
U x (z)
1 + â 1x ⋅ z −1 + â 2 x ⋅ z − 2
(3.9)
76
Z( z )
b̂ ⋅ z −1 + b̂ 2 z ⋅ z −2
= Gz ( z) = 1z
U z (z)
1 + â 1z ⋅ z −1 + â 2 z ⋅ z −2
(3.10)
A partir dos modelos estimados, representados pelas as equações (3.9) e (3.10), e
de acordo com a equação (A.18), os vetores de medidas são dados respectivamente pelas
equações (3.11) e (3.12).
ϕx T ( t ) = [ − x (t − 1) − x( t − 2) u x ( t − 1) u x ( t − 2) ]
(3.11)
ϕz T (t ) = [ − z(t − 1) − z( t − 2) u z (t − 1) u z ( t − 2) ]
(3.12)
Baseando-se na equação (A.19), os vetores dos parâmetros estimados são
representados respectivamente pelas equações (3.13) e (3.14).
θˆ x T = [ â 1x â 2 x b̂1x b̂ 2 x ]
(3.13)
θˆ z T = [ â 1z â 2 z b̂1z b̂ 2 z ]
(3.14)
Como os parâmetros a serem estimados são desconhecidos precisa-se estimular a
estimação inicial, e para tal atribuiu-se à matriz de covariância um valor da ordem de
“107”, ou seja, “P(0)=107xI” de acordo com as observações da seção A.5.
O MQR é melhor representado pelas equações (A.31), (A.35), (A.36) e (A.37) que
contemplam o fator de esquecimento, dando ao usuário a opção de executar uma estimação
baseando-se nas medidas mais recentes, ao adotar “0,9 ≤ λ <1”, ou utilizando todas as
medidas anteriores, adotando, “λ=1”. Como esse trabalho se trata de uma simulação os
parâmetros do sistema não variam com o tempo, podendo adotar “λ=1”.
As validações dos modelos estimados, equações (3.9) e (3.10), são comprovadas
pelos valores dos coeficientes de Correlação Múltiplas (Ri2) abaixo:
R 2x = 0, 9999960773967439
R 2z = 0,9999989182795633
77
De acordo com a seção A.5.4 e com os valores anteriores, esses modelos
estimados podem ser considerados como válidos.
3.4 PROJETO DO CONTROLADOR GMV
A idéia do controlador de variância mínima generalizada (GMV) é determinar a
variável de controle “u(k)” com a minimização da função custo “J2” compensando um
ruído “n(k)” através de uma predição de passo “d+1”.
A função custo “J2” apresentada na seção A.7.4 pela equação (A.43), é reescrita
conforme equação (3.15).
J 2 = E{[ y(k + d + 1) − w(k + d + 1)]2 + r.u 2 (k )}
(3.15)
onde:
E{.} – esperança matemática;
y – variável controlada;
w – sinal de referência;
u – variável manipulada;
r – fator de ponderação da variável manipulada.
De acordo com a seção A.7.4 e como mostrado na figura 3.2, num projeto de
controlador devem ser considerados o retardo de tempo e as perturbações (ruídos)
incidentes no sistema.
υ
Sinal de
controle
u
C
D
ruído
B −d
⋅z
A
+
n
yu +
Saída
y
Figura 3.2 – Sistema com perturbação (ruído).
78
Como mostrado na seção A.7.4 pela equação (A.49) o ruído filtrado pode ser
representado pela seguinte equação:
C(z −1 )
L(z −1 ) −( d+1)
−1
= F(z ) +
⋅z
D(z −1 )
D(z −1 )
(3.16)
F( z −1 ) = 1 + f1.z −1 + L + f d .z − d
(3.17)
L( z −1 ) = l 0 + l 1.z −1 + L + l m−1.z − ( m−1)
(3.18)
onde:
d - atraso de transporte do sistema que representa o grau do polinômio “F”;
m - ordem do sistema, onde a expressão “-(m-1)” representa a ordem do polinômio “L”.
Como, no sistema sob análise, o atraso de transporte é “d=1” e a ordem do sistema
é “m=na=2”, os polinômios “F” e “L” podem ser representados da seguinte forma:
F(z −1 ) = 1 + f1.z −1
(3.19)
L(z −1 ) = l 0 + l 1.z −1
(3.20)
Os polinômios “F” e “L” são determinados pela identidade representada a seguir,
resultante da equação (3.16).
C(z-1 ) = D(z-1 ) ⋅ F(z-1 ) + L(z-1 ) ⋅ z − (d+1)
(3.21)
De acordo com a seção A.7.4, pode-se assumir que o denominador do filtro do
ruído seja igual ao denominador da função de transferência do sistema, ou seja, “D(z-1) =
A(z-1)”, assim como “C(z-1) = 1”, resultando numa simplificação nas funções do ruído e da
identidade, dada pela equação (3.16), e ficando respectivamente representadas pelas
equações (3.22) e (3.23).
79
1
L(z −1 ) −( d+1)
−1
=
F
(
z
)
+
⋅z
A(z −1 )
A(z −1 )
(3.22)
1 = A(z-1 ) ⋅ F(z-1 ) + L(z-1 ) ⋅ z − ( d+1)
(3.23)
A partir da equação (3.23), usando o denominador da equação (3.9) ou da equação
(3.10), assim como as equações (3.19) e (3.20) determina-se os parâmetros dos polinômios
“F” e “L”, como segue:
1 = (1 + a 1 ⋅ z -1 + a 2 ⋅ z -2 ) ⋅ (1 + f1 ⋅ z -1 ) + (l 0 + l 1 ⋅ z -1 ) ⋅ z −2 ⇒
1 = 1 + (a 1 + f1 ) ⋅ z -1 + (a 2 + a 1 ⋅ f1 + l 0 ) ⋅ z -2 + (a 2 ⋅ f1 + l 1 ) ⋅ z -3
(3.24)
Igualando os termos de mesma ordem da equação (3.24), obtém-se:
1 = 1
f1 = − a1
a + f = 0
1
1
⇒ l 0 = a 12 − a 2
a 2 + a1 ⋅ f1 + l 0 = 0
l = a ⋅a
1
1
2
a 2 ⋅ f1 + l 1 = 0
(3.25)
A lei de controle do controlador de variância mínima generalizada, ou seja, a
variável de controle “u(k)” que foi determinada na seção A.7.4 representada pela equação
(A.72) é reescrita neste capítulo pela equação (3.26).
w (k + 2) − L(z −1 ) ⋅ y(k )
u (k ) =
r
F(z −1 ) ⋅ z ⋅ B(z −1 ) +
b1
(3.26)
Substituindo as equações (3.19), (3.20) e o numerador da equação (3.9) ou da
equação (3.10) na equação (3.26), tem-se:
u (k ) =
w (k + 2) − (l 0 + l 1 ⋅ z −1 ) ⋅ y(k )
r
(1 + f1 ⋅ z ) ⋅ z ⋅ (b1 ⋅ z + b 2 ⋅ z ) +
b1
−1
−1
−2
⇒
80
u (k ) =
u (k ) =
w ( k + 2) − l 0 ⋅ y ( k ) − l 1 ⋅ z − 1 ⋅ y ( k )
⇒
r
−1
−2
b1 + + (b1 ⋅ f1 + b 2 ) ⋅ z + b 2 ⋅ f1 ⋅ z
b1
(3.27)
w (k + 2) − l 0 ⋅ y(k ) − l 1 ⋅ y(k − 1) − (b1 ⋅ f1 + b 2 ) ⋅ u (k − 1) − (b 2 ⋅ f1 ) ⋅ u (k − 2)
r
b1 +
b1
(3.28)
A equação (3.28) é a lei de controle do GMV representada na forma de equação a
diferenças. O funcionamento do controlador GMV aliado ao algoritmo de identificação
MQR pode ser representado pelo diagrama de blocos da figura 3.3.
erro de
modelagem
ε(t)
Algoritmo de
atualização
Parâmetros do modelo
â1 â 2 b̂1 b̂2
MQR
Modelo
correção das
estimativas
–
b̂1 ⋅ z −1 + b̂ 2 ⋅ z −2
−1
−2
ŷ(t)
1 + â1 ⋅ z + â 2 ⋅ z
Projeto do
Controlador
saída
estimada
GMV
Parâmetros
do controlador
l 0 l1 f1 r
u(k)
B −d
⋅z
A
+
yu +
y(k)
Saída
–
e(k)
erro
Referência
w(k)
w (k + 2) − l 0 ⋅ y(k ) − l1 ⋅ z −1 ⋅ y(k )
r
b1 + + (b1 ⋅ f1 + b 2 ) ⋅ z −1 + b 2 ⋅ f1 ⋅ z−2
b1
Sinal de controle
(entrada)
+
n
ruído
υ
1
A
+
Sistema
Figura 3.3 – Diagrama de blocos do controlador adaptativo auto-ajustável mostrando em
detalhes o sistema com ruído, o MQR e o GMV.
Na figura 3.3, o sistema representado pela equação (3.9) ou (3.10) recebe a
entrada u(k) e fornece como saída y(k). Esses dados são utilizados no MQR para que os
parâmetros do sistema a1 , a2 , b 1 e b 2 sejam estimados em tempo real e usados no projeto e
81
na implementação do controlador GMV, para a geração da variável de controle u(k),
conforme equação (2.28). Nesse caso, como o sistema é de dois graus de liberdade e
desacoplado, duas variáveis de controle são determinadas, ou seja, ux(k) e uz(k), para
controlar o sistema representado pelas equações (3.9) e (3.10) nas direções “X” e “Z”,
respectivamente.
Nos primeiros instantes (0,07s) de funcionamento do programa utilizou-se um
controlador proporcional de ganho “kp = 0,01” com o intuito de estimar parcialmente a
planta e evitar uma ação inadequada do controle adaptativo. Após esse tempo inicial o
controlador GMV é automaticamente acionado.
Portanto o posicionamento da massa da mesa de coordenadas de dois graus de
liberdade será controlado por um controlador adaptativo composto por uma lei de controle
GMV e algoritmo de estimação de parâmetros MQR de maneira que possua as seguintes
especificações de desempenho ao seguir trajetórias de referência:
•
sobre-sinal máximo, “Mp”, de 20%;
•
tempo de acomodação, “ts”, de 1 segundo para o critério de 2%.
Para que o sistema em estudo acompanhe trajetórias de referência, atendendo as
especificações de desempenho, podem-se ajustar, as seguintes variáveis:
•
a magnitude dos elementos da diagonal da matriz de covariância “P(t)”;
•
o fator de ponderação, “r”, da variável de controle;
•
o fator de esquecimento, λ;
•
o instante, “tg”, em que o controlador proporcional sai para a entrada do
controlador GMV;
•
a constante de proporcionalidade, “kp”, do controlador proporcional;
•
a estimação inicial dos parâmetros dos modelos estimados.
3.5 CONCLUSÃO
Neste capítulo realizou-se o desenvolvimento de um projeto de um controlador
adaptativo auto-ajustável composto por uma lei de controle do tipo GMV e por um
estimador de parâmetros do tipo MQR para atuar em um sistema hidráulico simulado de
dois graus de liberdade, controlando o posicionamento de uma carga “M2” no plano “X Z”
ao seguir três diferentes trajetórias.
82
Na seção 3.2 foram obtidas as funções discretas da mesa de coordenadas na forma
de equação à diferenças, equações (3.7) e (3.8), a partir dos parâmetros apresentados na
tabela 3.1, que serão utilizadas na simulação como sendo o sistema real.
Na seção 3.3 obteve-se o modelo estimado bem com sua validação.
A lei de controle do GMV foi obtida na seção 3.4 permitindo compor um
diagrama de blocos para explanar o funcionamento do controlador adaptativo em estudo.
Na seqüência as especificações de desempenho do sistema foram apresentadas bem como
os termos que podem ser manipulados para que essa obediência seja realizada.
CAPÍTULO 4
- RESULTADOS
4.1 INTRODUÇÃO
Serão apresentados neste capítulo os resultados da simulação do controle de
posição de uma carga utilizando uma mesa de coordenadas de dois graus de liberdade
acionada hidraulicamente e controlada por um controlador adaptativo do tipo GMV.
Para testar o controlador em estudo agindo sob a mesa de coordenadas, são
utilizadas três trajetórias de referência distintas para fazer com que o sistema siga as
mesmas, obedecendo às especificações de desempenho descritas na seção 3.4.
As três trajetórias de referência que o sistema deverá seguir são apresentadas na
seção 4.2 na seguinte ordem: trajetória de referência polinomial cúbica seguida de degrau,
em seguida apresenta-se a trajetória circular e por último apresenta-se a trajetória em
degraus.
Na seção 4.3 são apresentadas cinco configurações distintas, denominadas de
casos, na tentativa de obter uma configuração única que faça com que o sistema siga as três
trajetórias de referência obedecendo às especificações de desempenho. Na seqüência são
apresentados os resultados do sistema ao seguir as trajetórias através das apresentações das
curvas experimentais do desempenho do sistema, da variável de controle, dos parâmetros
estimados do sistema e do erro de estimação.
As conclusões relativas a este capítulo encontram-se na seção 4.4.
84
4.2 APRESENTAÇÃO DAS TRAJETÓRIAS DE REFERÊNCIA
Na ordem, serão apresentadas as trajetórias de referência: trajetória polinomial
cúbica seguida de um degrau, trajetória circular e por último a trajetória em degraus.
4.2.1 Apresentação da trajetória de referência polinomial cúbica seguida de degrau
Esta trajetória utiliza-se de um polinômio de grau 3 para que o sistema atinja um
determinado patamar de forma suave, permanecendo neste patamar durante alguns
instantes de tempo. O programa do controlador GMV em “Matlab” responsável pela
obediência do sistema à referência cúbica está listado no item B.3 do apêndice B.
De acordo com SPONG e VIDYASAGAR (1989) supõe-se que num instante
inicial, o deslocamento da extremidade do manipulador, satisfaça as seguintes condições:
w(ti) = wi
e w’(ti) = w’i
(4.1)
onde:
w(t) – função do posicionamento do manipulador;
w’(t) – função da velocidade do manipulador;
ti – instante de tempo inicial;
wi – posição inicial do manipulador;
w’i – velocidade inicial do manipulador.
Em um determinado instante (tf), deseja-se que o manipulador satisfaça a seguinte
condição:
w(tf) = wf e w’(tf) = w’f
onde:
tf – tempo final da trajetória;
wf – posição final do manipulador;
w’f – velocidade final do manipulador.
(4.2)
85
Um exemplo da trajetória polinomial é mostrado na figura 4.1.
w(t)
wf
wi
t
ti
tf
Figura 4.1 – Exemplo de uma trajetória polinomial cúbica.
Tendo quatro condições para serem satisfeitas, dadas pelas equações (4.1) e (4.2),
faz-se necessário um polinômio com quatro coeficientes independentes que possam ser
determinados a fim de satisfazer estas condições (SPONG e VIDYASAGAR, 1989).
Portanto, considera-se a seguinte trajetória cúbica:
w ( t ) = q 0 + q1 ⋅ t + q 2 ⋅ t 2 + q 3 ⋅ t 3
(4.3)
Então a velocidade pode ser determinada pela derivada da equação (4.3),
resultando em:
w ' ( t ) = q1 + 2 ⋅ q 2 ⋅ t + 3 ⋅ q 3 ⋅ t 2
(4.4)
Combinando as equações (4.3) e (4.5) com as quatro considerações representadas
por (4.1) e (4.2), obtém-se:
w i = q 0 + q1 ⋅ t i + q 2 ⋅ t i 2 + q 3 ⋅ t i 3
(4.5)
w 'i = q 1 + 2 ⋅ q 2 ⋅ t i + 3 ⋅ q 3 ⋅ t i 2
(4.6)
w f = q 0 + q1 ⋅ t f + q 2 ⋅ t f 2 + q 3 ⋅ t f 3
(4.7)
w 'f = q 1 + 2 ⋅ q 2 ⋅ t f + 3 ⋅ q 3 ⋅ t f 2
(4.8)
86
A trajetória cúbica de referência utilizada neste trabalho tem as seguintes
condições iniciais:
instante inicial – ti = 0;
posição inicial – wi = 0;
velocidade inicial – w’i = 0.
E as seguintes condições finais:
intervalos de amostragem para o final da trajetória – tf = 100 (tf = 1s);
posição final – wf = 0,15 m;
velocidade final – w’f = 0.
Substituindo as condições iniciais e finais da trajetória nas equações (4.5), (4.6),
(4.7) e (4.8), obtém-se:
q 0 = 0
q 0
q
q1 = 0
1
⇒
2
3
q 2 ⋅ t f + q 3 ⋅ t f = w i
q 2
2
q 3
2 ⋅ q 2 ⋅ t f + 3 ⋅ q 3 ⋅ t f = 0
q 0 = 0
q = 0
1
⇒
−6
q 2 = 45x10
q 3 = −0,3x10−6
= − 2 ⋅ w i t 3f
=0
=0
= 3 ⋅ w i t f2
(4.9)
Substituindo os parâmetros obtidos pela equação (4.9), na equação (4.3), e ainda
alterando a variável de tempo “t” para a variável de amostragem “k”, obtém-se o
polinômio abaixo, representando a trajetória cúbica de referência para cada intervalo de
amostragem.
w(k ) = 45x10−6 ⋅ k 2 − 0,3x10−6 ⋅ k 3
(4.10)
Portanto, ambos os pistões hidráulicos seguirão a trajetória representada pela
equação (4.10) ao mesmo tempo nos cem primeiros intervalos de amostragem (no primeiro
segundo), permanecendo na posição final (w1 = 0,15m) até o intervalo de amostragem de
número “k=300”, figura 4.2. O intervalo de amostragem foi definido anteriormente como,
“Ts = 10ms”, portanto o tempo total para percorrer toda trajetória cúbica de referência é de
“t=3s”.
87
0.2
Posição da extremidade do atuador (m)
0.18
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
0
0.5
1
1.5
Tempo (s)
2
2.5
3
Figura 4.2 – Trajetória de referência cúbica.
4.2.2 Apresentação da trajetória de referência circular
Neste caso o cada pistão do sistema irá seguir uma trajetória distinta produzindo
uma trajetória circular de raio 0,15m no plano “X Z”, ou seja, a carga “M2” deverá seguir a
referida trajetória de referência.
O início da trajetória será no ponto (0,15;0) do plano “X Z” e fará o percurso
apenas uma vez no sentido anti-horário, como mostra a figura 4.3.
0.2
Posição da carga "M2" no eixo "Z"(m)
0.15
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
-0.2
-0.15
-0.1 -0.05
0
0.05
0.1
0.15
Posição da carga "M2" no eixo "X"(m)
0.2
Figura 4.3 – Trajetória de referência circular a ser seguida pelo sistema.
88
O programa do controlador GMV em “Matlab”, responsável pela obediência do
sistema à trajetória de referência circular, está listado no item B.3 do apêndice B.
Para que isto seja possível, cada um dos dois pistões do sistema deverá iniciar os
seus movimentos ao mesmo tempo e seguir trajetórias de referência diferentes, ou seja, o
pistão 1 deverá seguir uma trajetória de referência defina por uma função cosseno e o
pistão 2 deverá seguir uma trajetória definida por uma função seno, como mostram as
equações (4.11) e (4.12).
w1 (k ) = 0,15 ⋅ cos(α(k ))
(4.11)
w 2 (k ) = 0,15 ⋅ sen(α(k ))
(4.12)
Foi definido anteriormente que o intervalo de amostragem é de, “Ts = 10 ms”. Em
cada período de amostragem será fornecido um ângulo em radiano de “α=0,002.π.k”,
necessitando de “k=1000” intervalos de amostragem para realizar a volta completa, ou
seja, a volta completa será realizada num intervalo de tempo igual a “t=10s”.
As trajetórias de referência para o pistão 1 e para o pistão 2, determinada pelas
equações (4.11) e (4.12), são representadas pelas figuras 4.4 e 4.5, respectivamente.
0.2
Posição da extremidade do atuador (m)
0.15
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
0
2
4
6
8
10
Tempo (s)
Figura 4.4 – Trajetória de referência co-senoidal a ser seguida pelo pistão 1.
89
Posição da extremidade do atuador no eixo "Z"(m)
0.2
0.15
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
0
2
4
6
8
10
Tempo (s)
Figura 4.5 – Trajetória de referência senoidal a ser seguida pelo pistão 2.
4.2.3 Apresentação da trajetória de referência em degraus
Essa trajetória é composta por vários patamares de posicionamento e de alterações
bruscas entre essas posições, como mostra a figura 4.6.
O programa do controlador GMV em “Matlab”, responsável pela obediência do
sistema à trajetória de referência em degraus, está listado no item B.3 do apêndice B.
Posição da extremidade do atuador (m)
0.25
0.2
0.15
0.1
0.05
0
0
5
10
Tempo (s)
15
20
Figura 4.6 – Trajetória de referência em degraus.
90
A trajetória de referência em degraus do sistema é composta pelas seguintes
etapas, de acordo com figura 4.6.
i.
nos quinhentos primeiros intervalos de amostragem (t = 5s) a carga “M2”
deve estar deslocada de sua origem de “w = 0,1m”;
ii.
após a etapa inicial, a carga “M2” deve estar distante de sua origem de
“w=0,2m” até atingir mil intervalos de amostragem (t = 10s);
iii.
do término da segunda etapa até o intervalo de amostragem de número mil
e quinhentos (t = 15s) a carga “M2” deve permanecer distante de sua
origem de “w=0,05m”;
iv.
na quarta e última etapa, a carga “M2” irá para a posição “w=0,15”,
permanecendo neste ponto até atingir dois mil intervalos de amostragem
que ocorre em “t = 20s”.
4.3 SIMULAÇÕES
A seguir são apresentados os resultados do sistema hidráulico ao acompanhar as
três trajetórias de referência utilizando o controlador GMV.
A intenção é de utilizar uma configuração única no controlador GMV para seguir
as três trajetórias. Várias tentativas foram realizadas e as mais importantes estão
representadas na tabela 4.1 sendo denominadas de casos.
Nem todas as configurações são utilizadas para as três trajetórias de referências.
Inicialmente analisa-se uma configuração para uma determinada trajetória e se esta gerar
resultados que atendam às especificações de desempenho a referida configuração será
analisada em outra trajetória de referência para que também se verifique a obediência desta
última às especificações de desempenho. Se os resultados da segunda trajetória atendem as
especificações de desempenho, testam-se também as configurações deste caso para a
terceira trajetória. Se os resultados da segunda trajetória não atendem às especificações de
desempenho outra configuração será analisada seguindo a mesma seqüência lógica, até que
uma única configuração gere resultados que atendam as especificações de desempenho
para as três trajetórias.
91
Tabela 4.1 – Valores das variáveis ajustáveis do controlador adaptativo, utilizados para
λ
r
tg
kp
P(0)
1
40
7
0,01
107 ·I
7
0,01
100
0
0
0
0
0
0
100.000
0
0
!
0
10.000
0
0
0
100.000
Caso 3
40
0
0
0
100.000
0
0
!
0
10.000
0
0
0
100.000
1
40
7
0,01
Caso 4
1
100
0
0
0
1
40
7
0,01
100·I
Caso 5
Caso 2
Caso 1
compor as configurações de cinco casos.
1
40
7
0,01
100·I
θ (0)
θ x (0)=[0,0,0,0]
θ z (0)=θ x (0)
θ x (0)=[0,0,0,0]
θ z (0)=θ x (0)
θ x (0)=[0,0,0,0]
θ z (0)=θ x (0)
θ x (0)=[-0.1,-1,4,9]
θ z (0)=θ x (0)
θ x (0)=[-0.1,-1,4,9]
θ z (0)=θ x (0)
Restrição em ui(.)
Não
Não
ux(k)≤umáx
uz(k)≤umáx
Não
ux(k)≤umáx
uz(k)≤umáx
Os valores das variáveis “r”, “tg”, “kp”, “P(0)” e “θ i (0)” foram obtidos por
tentativa e erro.
O valor máximo para as variáveis de controle do sistema, de acordo com a tabela
3.1, é umáx = 1,2x10-3 m.
4.3.1 Análise das configurações do caso 1 aplicadas à trajetória de referência
polinomial cúbica seguida de degrau
Neste item serão apresentados os resultados do sistema hidráulico ao seguira a
trajetória de referência polinomial cúbica seguida de degrau, sob ação do GMV e
utilizando as configurações do caso 1, para analisar a adequação dos referidos resultados às
especificações de desempenho.
As configurações do caso 1 estão resumidas na tabela 4.2.
92
Tabela 4.2 – Valores das variáveis da configuração do caso 1 a serem utilizados no GMV
para que o sistema hidráulico siga a trajetórias de referências.
Configurações do caso 1para o
Pistão 1 (eixo X) e o Pistão 2 (eixo Z)
λ
r
tg
kp
P(0)
1
40
7
0,01
107xI
θ (0)
[0,0,0,0]
Os resultados do sistema hidráulico de dois graus de liberdade ao seguir a
trajetória de referência cúbica seguida de degrau serão mostrados em duas etapas.
Inicialmente serão representados os resultados referentes ao pistão 1, responsável pelo
posicionamento da carga “M2” no eixo “X”, e em seguida os resultados referentes ao pistão
2, responsável pelo posicionamento da carga “M2” no eixo “Z”. Ambos os pistões devem
seguir a mesma trajetória cúbica seguida de degrau e ao mesmo tempo.
Os resultados referentes ao pistão 1 estão representados pelas figuras 4.7, 4.8 e
4.9.
6
Evolução dos parâmetros para o pistão 1
5
a1
a2
b1
b2
4
3
2
1
0
-1
-2
0
0.5
1
1.5
Tempo (s)
2
2.5
3
Figura 4.7 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória cúbica seguida de degrau utilizando as configurações do caso 1.
93
0.2
trajetória de referência
saída estimada
saída do sistema
tolerância 2%
Posição da carga M2 no eixo "X" (m)
0.18
0.16
0.14
0.156
0.12
0.154
0.1
0.152
0.08
0.15
0.06
0.04
0.148
0.02
0.146
0
0.144
0
0.5
1
1.5
Tempo (s)
2
2.5
3
0.9
0.92 0.94 0.96 0.98
Tempo (s)
1
1.02 1.04 1.06
Figura 4.8 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência cúbica seguida de degrau ao utilizar as configurações do
caso 1.
-3
1.5
x 10
1
0.01
variável de controle - u1(k)
Variável de controle 1 (m)
Erro de posição da carga M2 no eixo "X"(m)
0.015
0.005
0
-0.005
limites da variável de controle
0.5
0
-0.5
-0.01
-1
-0.015
0
0.5
1
1.5
Tempo (s)
2
2.5
3
-1.5
0
0.5
1
(a)
1.5
Tempo (s)
2
2.5
3
(b)
Figura 4.9 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência cúbica
seguida de degrau, sob ação do GMV e ao utilizar a configuração do caso 1.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus limites,
quando gerada pelo GMV e ao utilizar as configurações do caso 1 para seguir a trajetória
de referência cúbica seguida de degrau.
94
Os resultados referentes ao pistão 2 estão representados pelas figuras 4.10, 4.11 e
4.12.
7
Evolução dos parâmetros para o pistão 2
6
5
4
a1
a2
b1
b2
3
2
1
0
-1
-2
0
0.5
1
1.5
Tempo (s)
2
2.5
3
Figura 4.10 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória cúbica seguida de degrau utilizando as configurações do caso 1.
0.2
trajetória de referência
saída estimada
saída do sistema
tolerância 2%
Posição da carga M2 no eixo "Z" (m)
0.18
0.16
0.14
0.156
0.12
0.154
0.1
0.152
0.08
0.15
0.06
0.04
0.148
0.02
0.146
0
0.144
0
0.5
1
1.5
Tempo (s)
2
2.5
3
0.9
0.92 0.94 0.96 0.98
1
Tempo (s)
1.02 1.04 1.06
Figura 4.11 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência cúbica seguida de degrau ao utilizar as configurações do
caso 1.
95
-3
1.5
x 10
1
variável de controle - u2(k)
0.01
Variável de controle 2 (m)
Erro de posição da carga M2 no eixo "Z"(m)
0.015
0.005
0
-0.005
limites da variável de controle
0.5
0
-0.5
-0.01
-1
-0.015
-1.5
0
0.5
1
1.5
Tempo (s)
2
2.5
3
0
0.5
1
(a)
1.5
Tempo (s)
2
2.5
3
(b)
Figura 4.12 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência cúbica
seguida de degrau, sob ação do GMV e ao utilizar a configuração do caso 1.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 1 para seguir a trajetória de
referência cúbica seguida de degrau.
Ao analisar as figuras 4.8 e 4.11 observa-se que praticamente não houve sobresinal na saída do sistema, acomodando-se adequadamente à trajetória de referência e,
portanto atendendo as especificações de desempenho de sobre-sinal e tempo de
acomodação para o critério de 2%.
Ao analisar as figura 4.9(a) e 4.12(a) observa-se que o erro máximo ao longo da
trajetória cúbica em regime transitório, é de 0,003594m para o pistão 1 e de 0,003246m
para o pistão 2. Em regime estacionário o erro chega à zero para ambos os pistões.
A última análise a ser realizada é o valor da variável de controle com relação aos
seus limites, que não deve ultrapassar 1,2x10-3m, conforme tabela 4.1. Portanto, ao analisar
as figuras 4.9(b) e 4.12(b) observa-se que o valor da variável de controle para o eixo “X”
foi de 0,3533x10-3 m, e para o eixo “Z” foi de 0,3410x10-3 m, estando ambos dentro dos
limites pré-estabelecidos.
4.3.2 Análise das configurações do caso 1 aplicadas à trajetória de referência circular
Devido aos resultados satisfatórios obtidos na seção 4.3.1 ao utilizar as
configurações do caso 1, e com o intuito de utilizar uma configuração única para as três
trajetórias, neste item os resultados do sistema hidráulico, sob ação do GMV ao seguir a
96
trajetória de referência circular, serão também analisados com relação às especificações de
desempenho ao utilizar as configurações do caso 1.
As configurações do caso 1 são mostradas na tabela 4.1 e de forma resumida na
tabela 4.2.
Os resultados do sistema hidráulico ao seguir a trajetória de referência circular,
serão mostrados inicialmente em separado, começando com os resultados referentes ao
pistão 1 e em seguida serão mostrados os resultados referentes ao pistão 2. Por último será
mostrada a trajetória circular no plano “XZ” resultante da movimentação conjunta dos dois
pistões.
Os resultados referentes ao pistão 1 estão representados pelas figuras 4.13, 4.14 e
4.15.
7
Evolução dos parâmetros para o pistão 1
6
a1
a2
b1
b2
5
4
3
2
1
0
-1
-2
0
1
2
3
4
5
6
Tempo (s)
7
8
9
10
Figura 4.13 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória co-senoidal utilizando as configurações do caso 1.
97
0.2
trajetória de referência
saída estimada
saída do sistema
Posição da carga M2 no eixo "X" (m)
0.15
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
0
2
4
6
8
10
Tempo (s)
Figura 4.14 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência co-senoidal ao utilizar as configurações do caso 1.
-3
1.5
x 10
1
variável de controle - u1(k)
0.01
Variável de controle 1 (m)
Erro de posição da carga M2 no eixo "X"(m)
0.015
0.005
0
-0.005
limites da variável de controle
0.5
0
-0.5
-0.01
-1
-0.015
0
1
2
3
4
5
6
Tempo (s)
7
8
9
10
-1.5
0
1
(a)
2
3
4
5
6
Tempo (s)
7
8
9
10
(b)
Figura 4.15 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência co-senoidal,
sob ação do GMV e ao utilizar a configuração do caso 1.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus limites,
quando gerada pelo GMV e ao utilizar as configurações do caso 1 para seguir a trajetória
de referência co-senoidal.
Os resultados referentes ao pistão 2 estão representados pelas figuras 4.16, 4.17 e
4.18.
98
8
Evolução dos parâmetros para o pistão 2
7
a1
a2
b1
b2
6
5
4
3
2
1
0
-1
-2
0
1
2
3
4
5
6
Tempo (s)
7
8
9
10
Figura 4.16 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória senoidal utilizando as configurações do caso 1.
0.2
trajetória de referência
saída estimada
saída do sistema
Posição da carga M2 no eixo "Z" (m)
0.15
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
0
2
4
6
8
10
Tempo (s)
Figura 4.17 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência senoidal ao utilizar as configurações do caso 1.
99
-3
x 10
1.5
1
variável de controle - u2(k)
0.01
Variável de controle 2 (m)
Erro de posição da carga M2 no eixo "Z"(m)
0.015
0.005
0
-0.005
limites da variável de controle
0.5
0
-0.5
-0.01
-1
-0.015
0
1
2
3
4
5
6
Tempo (s)
7
8
9
-1.5
10
0
1
2
3
(a)
4
5
6
Tempo (s)
7
8
9
10
(b)
Figura 4.18 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência senoidal, sob
ação do GMV e ao utilizar a configuração do caso 1.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 1 para seguir a trajetória de
referência senoidal.
A figura 4.19 mostra a trajetória circular no plano “XZ” resultante das trajetórias
co-senoidal no eixo “X” e senoidal no eixo “Z”.
0.2
referência
saída do sistema
tolerância de 2%
0.15
Posição da carga M2 no eixo "Z" (m)
0.1
0.05
0.045
0
0.035
0.04
0.03
-0.05
0.025
0.02
-0.1
0.015
0.01
-0.15
0.005
-0.2
0
-0.15
-0.1
-0.05
0
0.05
Posição da carga M2 no eixo "X" (m)
0.1
0.15
0.2
0.13
0.14
0.15
0.16
Posição da carga M2 no eixo "X" (m)
0.17
Figura 4.19 – Resposta do sistema hidráulico seguindo a trajetória circular no plano X Z,
sob ação do controlador GMV e utilizando as configurações do caso 1.
100
Analisando a figura 4.19 observa-se que o sistema controlado pelo GMV atende
aos critérios de desempenho com relação ao sobre-sinal e ao tempo de acomodação de 1s,
para o critério de 2%. Observa-se também, através das figuras 4.15(b) e 4.18(b), que os
valores das variáveis de controle para o eixo “X” e para o eixo “Z” estão dentro dos seus
limites.
4.3.3 Análise das configurações do caso 1 aplicadas à trajetória de referência em
degraus
Devido aos resultados satisfatórios dos itens 4.3.1 e 4.3.2 obtidos ao utilizar as
configurações do caso 1, e com o intuito de utilizar uma configuração única para as três
trajetórias, neste item os resultados do sistema hidráulico, sob ação do GMV ao seguir a
trajetória de referência em degraus, serão também analisados com relação às especificações
de desempenho ao utilizar as configurações do caso 1.
As configurações do caso 1 são mostradas na tabela 4.1 e de forma resumida na
tabela 4.2.
Os resultados do sistema hidráulico de dois graus de liberdade ao seguir a
trajetória de referência em degraus serão mostrados em duas etapas. Inicialmente serão
representados os resultados referentes ao pistão 1, responsável pelo posicionamento da
carga “M2” no eixo “X”, e em seguida os resultados referentes ao pistão 2, responsável
pelo posicionamento da carga “M2” no eixo “Z”. Ambos os pistões devem seguir a mesma
trajetória em degraus e ao mesmo tempo.
Os resultados referentes ao pistão 1 estão representados pelas figuras 4.20, 4.21 e
4.22.
101
Evolução dos parâmetros para o pistão 1
20
a1
a2
b1
b2
15
10
5
0
-5
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
Figura 4.20 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória em degraus utilizando as configurações do caso 1.
0.25
Mp=20.0572%
trajetória de referência
saída estimada
saída do sistema
sobre-sinal 20%
tolerância 2%
ts =0.24s
Posição da carga M2 no eixo "X" (m)
0.2
0.15
Mp=21.9508%
ts=0.18s
0.1
Mp=29.222%
ts =0.67s
0.05
Mp=19.2342%
ts=0.19s
0
0
2
4
6
8
10
Tempo (s)
12
14
16
18
20
Figura 4.21 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do caso 1.
102
-3
0.2
8
6
0.15
4
0.1
Variável de controle 1 (m)
Erro de posição da carga M2 no eixo "X"(m)
x 10
0.05
0
-0.05
2
0
-2
-4
-6
variável de controle - u1(k)
-0.1
limites da variável de controle
-8
-0.15
-0.2
-10
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
-12
0
2
4
6
8
(a)
10
12
Tempo (s)
14
16
18
20
(b)
Figura 4.22 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 1.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus limites,
quando gerada pelo GMV e ao utilizar as configurações do caso 1 para seguir a trajetória
de referência em degraus.
Os resultados referentes ao pistão 1 estão representados pelas figuras 4.23, 4.24 e
4.25.
12
a1
a2
b1
b2
Evolução dos parâmetros para o pistão 2
10
8
6
4
2
0
-2
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
Figura 4.23 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória em degraus utilizando as configurações do caso 1.
103
0.25
Mp=36.3993%
trajetória de referência
saída estimada
saída do sistema
sobre-sinal 20%
tolerância 2%
ts=0.44s
Posição da carga M2 no eixo "Z" (m)
0.2
0.15
Mp=17.5527%
ts=0.2s
0.1
Mp=12.7573%
ts =0.14s
0.05
Mp=17.8474%
ts =0.25s
0
0
2
4
6
8
10
Tempo (s)
12
14
16
18
20
Figura 4.24 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do caso 1.
-3
8
0.2
6
0.15
4
0.1
Variável de controle 2 (m)
Erro de posição da carga M2 no eixo "Z"(m)
x 10
0.05
0
-0.05
-0.1
0
-2
-4
-6
variável de controle - u2(k)
limites da variável de controle
-8
-0.15
-0.2
2
-10
-12
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
0
2
(a)
4
6
8
10
12
Tempo (s)
14
16
18
20
(b)
Figura 4.25 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 1.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 1 para seguir a trajetória de
referência em degraus.
104
Ao analisar as figuras 4.21 e 4.24, observa-se que em alguns patamares os valores
dos sobre-sinais estão acima dos 20%, determinados pela especificação de desempenho,
mostrando a não adequação do sistema, sob ação do GMV, para seguir a trajetória em
degraus utilizando as configurações do caso 1. Portanto as configurações do caso 1 só
satisfizeram a trajetória de referência polinomial cúbica seguida de degrau e a trajetória de
referência circular, não alcançando o objetivo de utilizar uma única configuração para as
três trajetórias.
4.3.4 Análise das configurações do caso 2 aplicadas à trajetória de referência em
degraus
Como a trajetória de referência em degraus foi a única que não se adequou às
configurações do caso 1, nesta seção será analisado o sistema hidráulico, sob ação do
GMV, ao seguir a referida trajetória de referência utilizando as configurações do caso 2
para verifica a obediência às especificações de desempenho.
As configurações do caso 2 estão resumidas na tabela 4.3.
Tabela 4.3 – Valores das variáveis da configuração do caso 2 a serem utilizados no GMV
para que o sistema hidráulico siga as trajetórias de referências.
Configurações do caso 2para o
Pistão 1 (eixo X) e o Pistão 2 (eixo Z)
λ
1
r
40
tg
7
kp
0,01
P(0)
100
0
0
0
0
0
0
100.000
0
0
!
0
10.000
0
0
0
100.000
θ (0)
[0,0,0,0]
A diferença entre as configurações do primeiro caso com relação às configurações
do segundo caso é que neste último utilizou-se uma matriz de covariância inicial com
magnitudes diferenciadas nos elementos da sua diagonal, de acordo com o item A.5, para
que haja estímulos distintos na estimação de cada um dos parâmetros do modelo estimado.
Os valores dos elementos iniciais da diagonal da matriz de covariância foram
obtidos por tentativa e erro.
105
Os resultados para o caso 2 referentes ao pistão 1 seguindo a trajetória em degraus
estão apresentados nas figuras 4.26, 4.27 e 4.28.
12
Evolução dos parâmetros para o pistão 1
10
8
a1
a2
b1
b2
6
4
2
0
-2
-4
-6
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
Figura 4.26 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória em degraus utilizando as configurações do caso 2.
0.25
Mp=18.5546%
trajetória de referência
saída estimada
saída do sistema
sobre-sinal 20%
tolerância 2%
t s =0.13s
Posição da carga M2 no eixo "X" (m)
0.2
0.15
Mp=17.2548%
t s=0.3s
0.1
Mp=3.888%
t s=0.23s
0.05
Mp=8.8452%
t s=0.24s
0
0
2
4
6
8
10
Tempo (s)
12
14
16
18
20
Figura 4.27 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do caso 2.
106
8
0.15
6
0.1
4
Variável de controle 1 (m)
Erro de posição da carga M2 no eixo "X"(m)
-3
0.2
0.05
0
-0.05
-0.1
2
0
-2
variável de controle - u1(k)
-4
limites da variável de controle
-6
-0.15
-0.2
x 10
-8
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
-10
0
2
4
6
8
10
12
Tempo (s)
(a)
14
16
18
20
(b)
Figura 4.28 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 2.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus limites,
quando gerada pelo GMV e ao utilizar as configurações do caso 2 para seguir a trajetória
de referência em degraus.
Os resultados para o caso 2 referentes ao pistão 2 seguindo a trajetória em degraus
estão apresentados nas figuras 4.29, 4.30 e 4.31.
12
Evolução dos parâmetros para o pistão 2
10
8
a1
a2
b1
b2
6
4
2
0
-2
-4
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
Figura 4.29 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória em degraus utilizando as configurações do caso 2.
107
0.25
Mp=18.9319%
trajetória de referência
saída estimada
saída do sistema
sobre-sinal 20%
tolerância 2%
t s=0.12s
Posição da carga M2 no eixo "Z" (m)
0.2
0.15
Mp=17.4236%
t s=0.2s
0.1
Mp=1.2376%
t s =0.23s
0.05
Mp=10.4202%
ts =0.08s
0
0
2
4
6
8
10
Tempo (s)
12
14
16
18
20
Figura 4.30 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do caso 2.
8
0.15
6
0.05
0
-0.05
-0.1
2
0
-2
variável de controle - u2(k)
-4
limites da variável de controle
-6
-0.15
-0.2
x 10
4
0.1
Variável de controle 2 (m)
Erro de posição da carga M2 no eixo "Z"(m)
-3
0.2
-8
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
-10
0
2
(a)
4
6
8
10
12
Tempo (s)
14
16
18
20
(b)
Figura 4.31 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 2.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 2 para seguir a trajetória de
referência em degraus.
108
Com o ajuste realizado na matriz de covariância, apresentado na tabela 4.3,
observa-se, pelas figuras 4.27 e 4.30, que as condições de sobre-sinal e tempo de
acomodação foram satisfeitas ao longo de toda trajetória em degraus.
Ao analisar as figura 4.28(a) e 4.31(a), observa-se que o erro máximo em regime
transitório ocorreu no primeiro patamar, para ambos os pistões, e ficou entorno de 0,1m e
para os outros patamares não excedeu 0,5m. Já em regime permanente, o erro foi zero em
todos os patamares dos dois pistões.
Observando-se as figuras 4.28(b) e 4.31(b) verifica-se que a variável de controle
ultrapassou os seus limites especificados na tabela 3.1. Tal resultado só é possível em
simulações, pois o valor desta variável de controle está relacionado com o deslocamento do
carretel da válvula direcional e nesta situação os valores obtidos representam que o
deslocamento do carretel ultrapassa aos limites físicos da válvula, sendo isto impossível na
prática. Por esse motivo as configurações do caso 2 não serão aplicadas às outras duas
trajetórias de referência, necessitando de uma análise mais detalhada que será realizada nas
configurações do caso 3.
4.3.5 Análise das configurações do caso 3 aplicadas à trajetória de referência em
degraus
Observou-se na seção 4.3.4 que as variáveis de controle do sistema hidráulico
ultrapassaram os seus limites impostos e por esse motivo as configurações do caso 3, como
pode ser observado na tabela 4.4, serão iguais ás configurações do caso 2 acrescentando-se
ao programa uma restrição nos valores das variáveis de controle limitando-os aos seus
limites especificados na tabela 3.1. Tal atitude aproxima esta simulação mais à realidade,
representando a utilização de uma válvula específica. O objetivo de utilizar a referida
restrição é de verificar se na prática quando for utilizada uma válvula que tenha um carretel
que não possua um deslocamento suficiente para acompanhar a variável de controle, chega
a prejudicar ou não os resultados do sistema hidráulico em estudo.
As configurações do caso 3 estão resumidas na tabela 4.4.
109
Tabela 4.4 – Valores das variáveis da configuração do caso 3 a serem utilizados no GMV
para que o sistema hidráulico siga as trajetórias de referências.
Configurações do caso 3para o Pistão 1 (eixo X) e o Pistão 2 (eixo Z)
λ
1
r
40
tg
7
kp
θ (0)
P(0)
100
0
0
0
0,01
0
0
0
100.000
0
0
!
0
10.000
0
0
0
100.000
Restrição em
ui(.)
ux(k)≤umáx
[0,0,0,0]
uz(k)≤umáx
Observa-se que as configurações do caso 2 são iguais as configurações do caso 3,
acrescentando a esta última uma restrição do curso do carretel para cada válvula.
Os resultados para o caso 3 referentes ao modelo do pistão 1, ao seguir a trajetória
em degraus, são apresentados nas figuras 4.32, 4.33 e 4.34.
12
Evolução dos parâmetros para o pistão 1
10
a1
a2
b1
b2
8
6
4
2
0
-2
-4
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
Figura 4.32 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória em degraus utilizando as configurações do caso 3.
110
0.25
Mp=10.283%
trajetória de referência
saída estimada
saída do sistema
sobre-sinal 20%
tolerância 2%
t s=0.24s
Posição da carga M2 no eixo "X" (m)
0.2
0.15
Mp=6.8077%
t s=0.21s
0.1
Mp=6.5054%
t s =0.44s
0.05
Mp=5.2953%
ts =0.23s
0
0
2
4
6
8
10
Tempo (s)
12
14
16
18
20
Figura 4.33 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do caso 3.
-3
1.5
0.2
1
0.1
Variável de controle 2 (m)
Erro de posição da carga M2 no eixo "Z"(m)
0.15
x 10
0.05
0
-0.05
0.5
0
-0.5
variável de controle - u2(k)
-0.1
limites da variável de controle
-1
-0.15
-0.2
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
-1.5
0
2
(a)
4
6
8
10
12
Tempo (s)
14
16
18
20
(b)
Figura 4.34 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 3.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus limites,
quando gerada pelo GMV e ao utilizar as configurações do caso 3 para seguir a trajetória
de referência em degraus.
111
Os resultados para o caso 3 referentes ao pistão 2, ao seguir a trajetória em
degraus, são apresentados nas figuras 4.35, 4.36 e 4.37.
12
Evolução dos parâmetros para o pistão 2
10
a1
a2
b1
b2
8
6
4
2
0
-2
-4
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
Figura 4.35 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória em degraus utilizando as configurações do caso 3.
0.25
Mp=9.6823%
trajetória de referência
saída estimada
saída do sistema
sobre-sinal 20%
tolerância 2%
t s=0.24s
Posição da carga M2 no eixo "Z" (m)
0.2
0.15
Mp=6.3495%
t s=0.18s
0.1
Mp=6.2837%
t s =0.45s
0.05
Mp=5.2079%
ts =0.23s
0
0
2
4
6
8
10
Tempo (s)
12
14
16
18
20
Figura 4.36 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do caso 3.
112
-3
1.5
0.2
1
0.1
Variável de controle 2 (m)
Erro de posição da carga M2 no eixo "Z"(m)
0.15
x 10
0.05
0
-0.05
0.5
0
-0.5
variável de controle - u2(k)
-0.1
-0.15
-0.2
limites da variável de controle
-1
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
-1.5
0
2
(a)
4
6
8
10
12
Tempo (s)
14
16
18
20
(b)
Figura 4.37 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 3.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 3 para seguir a trajetória de
referência em degraus.
Após o acréscimo da restrição nas variáveis de controle do sistema hidráulico,
como mostram as figuras 4.34(b) e 4.37(b), ocorreu uma pequena lentidão na resposta do
controlador gerando um aumento do erro de posição da carga “M2”, nas transições entre os
patamares, como mostram as figuras 4.34(a), e 4.37(a). Através das figuras 4.33 e 4.36
observa-se um retardo no tempo de acomodação em alguns patamares, mas que em
nenhum momento chegou a prejudicar a resposta do sistema. Pelo contrário, o retardo
gerado na resposta do controlador auxiliou na minimização do sobre-sinal em ambos os
casos.
Após estes resultados conclui-se que a utilização de uma válvula, com
deslocamento do carretel menor que os valores da variável de controle, não prejudica o
sistema, podendo até vir à melhora as respostas.
4.3.6 Análise das configurações do caso 3 aplicadas à trajetória de referência
polinomial cúbica seguida de degrau
Devido aos resultados satisfatórios obtidos na seção 4.3.5 ao utilizar as
configurações do caso 3, e com o intuito de utilizar uma configuração única para as três
trajetórias, neste item os resultados do sistema hidráulico, sob ação do GMV ao seguir a
113
trajetória de referência polinomial cúbica seguida de degrau, serão também analisados com
relação às especificações de desempenho ao utilizar as configurações do caso 3.
As configurações do caso 3 são mostradas na tabela 4.1 e de forma resumida na
tabela 4.4.
Os resultados para o caso 3 referentes ao pistão 1, ao seguir a trajetória polinomial
cúbica seguida de degrau, são representados pelas figuras 4.38, 4.39 e 4.40.
8
a1
a2
b1
b2
Evolução dos parâmetros para o pistão 1
7
6
5
4
3
2
1
0
-1
-2
0
0.5
1
1.5
Tempo (s)
2
2.5
3
Figura 4.38 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória cúbica seguida de degrau utilizando as configurações do caso 3.
114
0.2
trajetória de referência
saída estimada
saída do sistema
tolerância 2%
Posição da carga M2 no eixo "X" (m)
0.18
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
0
0.5
1
1.5
Tempo (s)
2
2.5
3
Figura 4.39 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência cúbica seguida de degrau ao utilizar as configurações do
caso 3.
-3
0.07
1.5
x 10
variável de controle - u1(k)
1
0.05
limites da variável de controle
0.04
Variável de controle 1 (m)
Erro de posição da carga M2 no eixo "X"(m)
0.06
0.03
0.02
0.01
0
-0.01
0.5
0
-0.5
-1
-0.02
-0.03
0
0.5
1
1.5
Tempo (s)
2
2.5
3
-1.5
0
0.5
1
(a)
1.5
Tempo (s)
2
2.5
3
(b)
Figura 4.40 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência cúbica
seguida de degrau, sob ação do GMV e ao utilizar a configuração do caso 3.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus limites,
quando gerada pelo GMV e ao utilizar as configurações do caso 3 para seguir a trajetória
de referência cúbica seguida de degrau.
115
Os resultados para o caso 3 referentes ao pistão 2, ao seguir a trajetória cúbica, são
representados pelas figuras 4.41, 4.42 e 4.43.
8
Evolução dos parâmetros para o pistão 2
7
a1
a2
b1
b2
6
5
4
3
2
1
0
-1
-2
0
0.5
1
1.5
Tempo (s)
2
2.5
3
Figura 4.41 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória cúbica seguida de degrau utilizando as configurações do caso 3.
0.2
trajetória de referência
saída estimada
saída do sistema
tolerância 2%
Posição da carga M2 no eixo "Z" (m)
0.18
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
0
0.5
1
1.5
Tempo (s)
2
2.5
3
Figura 4.42 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência cúbica seguida de degrau ao utilizar as configurações do
caso 3.
116
-3
0.07
1.5
x 10
variável de controle - u2(k)
1
0.05
limites da variável de controle
0.04
Variável de controle 2 (m)
Erro de posição da carga M2 no eixo "Z"(m)
0.06
0.03
0.02
0.01
0
-0.01
0.5
0
-0.5
-1
-0.02
-0.03
0
0.5
1
1.5
Tempo (s)
2
2.5
3
-1.5
0
0.5
1
(a)
1.5
Tempo (s)
2
2.5
3
(b)
Figura 4.43 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência cúbica
seguida de degrau, sob ação do GMV e ao utilizar a configuração do caso 3.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 3 para seguir a trajetória de
referência cúbica seguida de degrau.
Observa-se pelas figuras 4.39 e 4.42 que as configurações do terceiro caso, que
foram satisfatórias para a trajetória em degraus, não trouxeram bons resultados para a
trajetória cúbica. Isso se deve ao fato de que a variação dos elementos da matriz inicial de
covariância gera, para esse tipo de trajetória que tem uma variação contínua, um retardo na
adaptação dos parâmetros do modelo do sistema, não sendo viável, portanto, aplicar essas
configurações para a trajetória circular, nem tampouco para as três trajetórias.
4.3.7 Análise das configurações do caso 4 aplicadas à trajetória de referência em
degraus
Na seção 4.3.6 observou-se que as configurações do caso 3 não se mostraram
adequadas às três trajetórias de referência sendo necessárias novas configurações, gerando
o caso 4.
Optou-se por analisar inicialmente as configurações do caso 4 no sistema
hidráulico sob ação do GMV ao seguir a trajetória de referência em degraus por esta
apresentar maiores ajustes para adequar-se às especificações de desempenho.
De acordo com a seção A.5, se os valores dos parâmetros são conhecidos
previamente, então esses valores podem ser utilizados para “ θ̂(0) ”, com “P(0) = m.I” onde
117
“ m ≈ 10 ”. Por tentativa e erro, obtiveram-se os valores iniciais para os vetores de
parâmetros estimados referentes ao pistão 1 e ao pistão 2, conforme descrito abaixo:
θˆ x (0) = θˆ z (0) = [-0.1,-1,4, 9]
(4.13)
assim como a matriz de covariância inicial referentes aos pistões 1 e 2.
Px(0) = Pz(0) = m.I, onde m = 100
(4.14)
Das equações (4.13) e (4.14), gera-se as configurações do caso 4 que estão
apresentados na tabela 4.1, e de forma resumida na tabela 4.5.
Tabela 4.5 – Valores das variáveis da configuração do caso 4 a serem utilizados no GMV
para que o sistema hidráulico siga as trajetórias de referências.
Configurações do caso 4para o Pistão 1 (eixo X) e o Pistão 2 (eixo Z)
λ
r
tg
kp
P(0)
1
40
7
0,01
100·I
θ (0)
θ x (0)=[-0.1,-1,4,9]
θ z (0)=θ x (0)
Restrição em ui(.)
Não
Os resultados para o caso 4 referentes ao modelo do pistão 1, ao seguir a trajetória
em degraus, são apresentados nas figuras 4.44, 4.45 e 4.46
118
Evolução dos parâmetros para o pistão 1
10
8
a1
a2
b1
b2
6
4
2
0
-2
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
Figura 4.44 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória em degraus utilizando as configurações do caso 4.
0.25
Mp=19.8875%
trajetória de referência
saída estimada
saída do sistema
sobre-sinal 20%
tolerância 2%
t s=0.36s
Posição da carga M2 no eixo "X" (m)
0.2
0.15
Mp=17.9662%
t s=0.27s
0.1
Mp=4.3339%
t s =0.22s
0.05
Mp=18.6834%
t s =0.27s
0
0
2
4
6
8
10
Tempo (s)
12
14
16
18
20
Figura 4.45 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do caso 4.
119
-3
8
0.2
6
0.15
4
0.1
Variável de controle 1 (m)
Erro de posição da carga M2 no eixo "X"(m)
x 10
0.05
0
-0.05
-0.1
0
-2
variável de controle - u1(k)
-4
limites da variável de controle
-6
-8
-0.15
-0.2
2
-10
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
-12
0
2
4
6
8
10
12
Tempo (s)
(a)
14
16
18
20
(b)
Figura 4.46 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 4.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus limites,
quando gerada pelo GMV e ao utilizar as configurações do caso 4 para seguir a trajetória
de referência em degraus.
Os resultados para o caso 4 referentes ao pistão 2, ao seguir a trajetória em
degraus, são apresentados nas figuras 4.47, 4.48 e 4.49.
Evolução dos parâmetros para o pistão 2
10
8
a1
a2
b1
b2
6
4
2
0
-2
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
Figura 4.47 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória em degraus utilizando as configurações do caso 4.
120
0.25
Mp=17.2018%
trajetória de referência
saída estimada
saída do sistema
sobre-sinal 20%
tolerância 2%
t s=0.25s
Posição da carga M2 no eixo "Z" (m)
0.2
0.15
Mp=18.2159%
t s=0.25s
0.1
Mp=0.73897%
t s =0.12s
0.05
Mp=17.5206%
ts =0.25s
0
0
2
4
6
8
10
Tempo (s)
12
14
16
18
20
Figura 4.48 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do caso 4.
8
0.15
6
x 10
4
0.1
Variável de controle 2 (m)
Erro de posição da carga M2 no eixo "Z"(m)
-3
0.2
0.05
0
-0.05
-0.1
2
0
-2
-4
-6
variável de controle - u2(k)
limites da variável de controle
-8
-0.15
-0.2
-10
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
-12
0
2
(a)
4
6
8
10
12
Tempo (s)
14
16
18
20
(b)
Figura 4.49 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 4.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 4 para seguir a trajetória de
referência em degraus.
121
Igualmente ao caso 2, quando aplicado à trajetória em degraus, as especificações
de desempenho fora adequadamente atendidas, mas os valores das variáveis de controle
ficaram foram dos limites estabelecidos na tabela 3.1, como pode ser observado pelas
figuras 4.46(b) e 4.49(b). Por este motivo as configurações do caso 4 não serão aplicadas
às outras duas trajetórias de referência.
A principal diferença entre o caso 2 e o caso 4, aplicados à trajetória em degraus,
é que para este último os resultados foram obtidos com pequena evolução da estimação dos
parâmetros, tanto para o pistão 1 como para o pistão 2, como pode ser observado pelas
figuras 4.44 e 4.47.
4.3.8 Análise das configurações do caso 5 aplicadas à trajetória de referência em
degraus
Analogamente ao terceiro caso, este quinto caso diferencia-se do quarto caso
apenas pelo o acréscimo da restrição nas variáveis de controle para que estas atinjam no
máximo os limites permitidos fisicamente pelas válvulas, ou seja, umáx = 1,2x10-3 m.
As configurações do caso 5 estão resumidas na tabela 4.6.
Tabela 4.6 – Valores das variáveis da configuração do caso 4 a serem utilizados no GMV
para que o sistema hidráulico siga as trajetórias de referências.
Configurações do caso 4para o Pistão 1 (eixo X) e o Pistão 2 (eixo Z)
λ
r
tg
kp
P(0)
1
40
7
0,01
100·I
θ (0)
θ x (0)=[-0.1,-1,4,9]
θ z (0)=θ x (0)
Restrição em ui(.)
ux(k)≤umáx
uz(k)≤umáx
Observa-se que as configurações do caso 4 são iguais as configurações do caso 5,
acrescentando a esta última uma restrição do curso do carretel para cada válvula.
Os resultados para o caso 5 referentes ao modelo do pistão 1, ao seguir a trajetória
em degraus, são apresentados nas figuras 4.50, 4.51 e 4.52
122
Evolução dos parâmetros para o pistão 1
10
8
a1
a2
b1
b2
6
4
2
0
-2
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
Figura 4.50 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória em degraus utilizando as configurações do caso 5.
0.25
Mp=2.5299%
trajetória de referência
saída estimada
saída do sistema
sobre-sinal 20%
tolerância 2%
t s =0.14s
Posição da carga M2 no eixo "X" (m)
0.2
0.15
Mp=2.4926%
t s=0.14s
0.1
Mp=0.67862%
t s=0.2s
0.05
Mp=2.0822%
t s=0.19s
0
0
2
4
6
8
10
Tempo (s)
12
14
16
18
20
Figura 4.51 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do caso 5.
123
-3
1.5
0.2
1
0.1
Variável de controle 1 (m)
Erro de posição da carga M2 no eixo "X"(m)
0.15
x 10
0.05
0
-0.05
0.5
0
-0.5
variável de controle - u1(k)
-0.1
limites da variável de controle
-1
-0.15
-0.2
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
-1.5
0
2
4
6
8
10
12
Tempo (s)
(a)
14
16
18
20
(b)
Figura 4.52 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 5.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus limites,
quando gerada pelo GMV e ao utilizar as configurações do caso 5 para seguir a trajetória
de referência em degraus.
Os resultados para o caso 5 referentes ao pistão 2, ao seguir a trajetória em
degraus, são apresentados nas figuras 4.53, 4.54 e 4.55.
Evolução dos parâmetros para o pistão 2
10
8
a1
a2
b1
b2
6
4
2
0
-2
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
Figura 4.53 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória em degraus utilizando as configurações do caso 5.
124
0.25
Mp=2.1472%
trajetória de referência
saída estimada
saída do sistema
sobre-sinal 20%
tolerância 2%
t s=0.13s
Posição da carga M2 no eixo "Z" (m)
0.2
0.15
Mp=2.0574%
t s=0.13s
0.1
Mp=0.2754%
t s =0.17s
0.05
Mp=1.0182%
ts =0.18s
0
0
2
4
6
8
10
Tempo (s)
12
14
16
18
20
Figura 4.54 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência em degraus ao utilizar as configurações do caso 5.
-3
0.2
1.5
x 10
1
0.1
Variável de controle 2 (m)
Erro de posição da carga M2 no eixo "Z"(m)
0.15
0.05
0
-0.05
0.5
0
-0.5
variável de controle - u2(k)
-0.1
limites da variável de controle
-1
-0.15
-0.2
0
2
4
6
8
10
12
Tempo (s)
14
16
18
20
-1.5
0
2
(a)
4
6
8
10
12
Tempo (s)
14
16
18
20
(b)
Figura 4.55 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência em degraus,
sob ação do GMV e ao utilizar a configuração do caso 5.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 5 para seguir a trajetória de
referência em degraus.
125
Essa configuração gerou resultados satisfatórios para a trajetória em degraus,
adequando-se aos valores impostos pelas especificações de desempenho, principalmente
àqueles relativos ao sobre-sinal, para o qual o máximo permitido é de 20% e o maior valor
encontrado não chega a 3%. Pelo nível de resposta obtido para a trajetória em degraus será
também utilizada essa configuração para as trajetórias cúbica e circular, como segue.
4.3.9 Análise das configurações do caso 5 aplicadas à trajetória de referência
polinomial cúbica seguida de degrau
As mesmas configurações usadas para o quinto caso da trajetória em degraus
serão utilizadas para a trajetória cúbica, com o objetivo de determinar uma configuração
única para as três trajetórias de referência.
As configurações do caso 5 são mostradas na tabela 4.1 e de forma resumida na
tabela 4.6.
Os resultados para o caso 5 referentes ao pistão 1, ao seguir a trajetória polinomial
cúbica seguida de degrau, são representados pelas figuras 4.56, 4.57 e 4.58.
Evolução dos parâmetros para o pistão 1
10
a1
a2
b1
b2
8
6
4
2
0
-2
0
0.5
1
1.5
Tempo (s)
2
2.5
3
Figura 4.56 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória cúbica seguida de degrau utilizando as configurações do caso 5.
126
0.2
trajetória de referência
saída estimada
saída do sistema
tolerância 2%
Posição da carga M2 no eixo "X" (m)
0.18
0.16
0.14
0.156
0.12
0.154
0.1
0.152
0.08
0.15
0.06
0.04
0.148
0.02
0.146
0
0.144
0
0.5
1
1.5
Tempo (s)
2
2.5
3
0.9
0.92 0.94 0.96 0.98
Tempo (s)
1
1.02 1.04 1.06
Figura 4.57 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência cúbica seguida de degrau ao utilizar as configurações do
caso 5.
-3
1.5
x 10
1
variável de controle - u1(k)
0.01
Variável de controle 1 (m)
Erro de posição da carga M2 no eixo "X"(m)
0.015
0.005
0
-0.005
limites da variável de controle
0.5
0
-0.5
-0.01
-1
-0.015
0
0.5
1
1.5
Tempo (s)
2
2.5
3
-1.5
0
0.5
1
(a)
1.5
Tempo (s)
2
2.5
3
(b)
Figura 4.58 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência cúbica
seguida de degrau, sob ação do GMV e ao utilizar a configuração do caso 5.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus limites,
quando gerada pelo GMV e ao utilizar as configurações do caso 5 para seguir a trajetória
de referência cúbica seguida de degrau.
127
Os resultados para o caso 5 referentes ao pistão 2, ao seguir a trajetória cúbica, são
representados pelas figuras 4.59, 4.60 e 4.61.
Evolução dos parâmetros para o pistão 2
10
8
a1
a2
b1
b2
6
4
2
0
-2
0
0.5
1
1.5
Tempo (s)
2
2.5
3
Figura 4.59 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória cúbica seguida de degrau utilizando as configurações do caso 5.
0.2
trajetória de referência
saída estimada
saída do sistema
tolerância 2%
Posição da carga M2 no eixo "Z" (m)
0.18
0.16
0.14
0.156
0.12
0.154
0.1
0.152
0.08
0.15
0.06
0.148
0.04
0.146
0.02
0
0.144
0
0.5
1
1.5
Tempo (s)
2
2.5
3
0.9
0.92 0.94 0.96 0.98
Tempo (s)
1
1.02 1.04 1.06
Figura 4.60 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência cúbica seguida de degrau ao utilizar as configurações do
caso 5.
128
-3
1.5
x 10
1
variável de controle - u2(k)
0.01
Variável de controle 2 (m)
Erro de posição da carga M2 no eixo "Z"(m)
0.015
0.005
0
-0.005
limites da variável de controle
0.5
0
-0.5
-0.01
-1
-0.015
0
0.5
1
1.5
Tempo (s)
2
2.5
3
-1.5
0
0.5
1
(a)
1.5
Tempo (s)
2
2.5
3
(b)
Figura 4.61 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência cúbica
seguida de degrau, sob ação do GMV e ao utilizar a configuração do caso 5.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 5 para seguir a trajetória de
referência cúbica seguida de degrau.
Observa-se, pelas figuras anteriores, que as configurações do quinto caso
trouxeram resultados satisfatórios para a trajetória cúbica.
4.3.10 Análise das configurações do caso 5 aplicadas à trajetória de referência
circular
Devido aos resultados satisfatórios dos itens 4.3.8 e 4.3.9 obtidos ao utilizar as
configurações do caso 5, e com o intuito de utilizar uma configuração única para as três
trajetórias, neste item os resultados do sistema hidráulico, sob ação do GMV ao seguir a
trajetória de referência circular, serão também analisados com relação às especificações de
desempenho ao utilizar as configurações do caso 5.
As configurações do caso 5 são mostradas na tabela 4.1 e de forma resumida na
tabela 4.6.
Os resultados para o caso 5 referentes ao pistão 1 seguindo a trajetória circular
estão apresentados nas figuras 4.62, 4.63 e 4.64.
129
Evolução dos parâmetros para o pistão 1
10
8
a1
a2
b1
b2
6
4
2
0
-2
0
1
2
3
4
5
6
Tempo (s)
7
8
9
10
Figura 4.62 – Evolução da estimação dos parâmetros do modelo do pistão 1 ao seguir a
trajetória co-senoidal utilizando as configurações do caso 5.
0.2
trajetória de referência
saída estimada
saída do sistema
Posição da carga M2 no eixo "X" (m)
0.15
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
0
2
4
6
8
10
Tempo (s)
Figura 4.63 – Respostas simulada e estimada do pistão 1, sob ação do controlador GMV,
para uma trajetória de referência co-senoidal ao utilizar as configurações do caso 5.
130
-3
x 10
1.5
1
variável de controle - u1(k)
0.01
Variável de controle 1 (m)
Erro de posição da carga M2 no eixo "X"(m)
0.015
0.005
0
-0.005
limites da variável de controle
0.5
0
-0.5
-0.01
-1
-0.015
0
1
2
3
4
5
6
Tempo (s)
7
8
9
10
-1.5
0
1
2
3
4
5
6
Tempo (s)
(a)
7
8
9
10
(b)
Figura 4.64 – (a) Erro entre a saída real do pistão 1 e a trajetória de referência co-senoidal,
sob ação do GMV e ao utilizar a configuração do caso 5.
(b) Análise da variável de controle do eixo X, “ux(k)”, com relação aos seus limites,
quando gerada pelo GMV e ao utilizar as configurações do caso 5 para seguir a trajetória
de referência co-senoidal.
Os resultados para o caso 5 referentes ao pistão 2 seguindo a trajetória circular
estão apresentados nas figuras 4.65, 4.66 e 4.67.
Evolução dos parâmetros para o pistão 2
10
8
a1
a2
b1
b2
6
4
2
0
-2
0
1
2
3
4
5
6
Tempo (s)
7
8
9
10
Figura 4.65 – Evolução da estimação dos parâmetros do modelo do pistão 2 ao seguir a
trajetória senoidal utilizando as configurações do caso 5.
131
0.2
trajetória de referência
saída estimada
saída do sistema
Posição da carga M2 no eixo "Z" (m)
0.15
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
0
2
4
6
8
10
Tempo (s)
Figura 4.66 – Respostas simulada e estimada do pistão 2, sob ação do controlador GMV,
para uma trajetória de referência senoidal ao utilizar as configurações do caso 5.
-3
1.5
x 10
1
0.01
Variável de controle 2 (m)
Erro de posição da carga M2 no eixo "Z"(m)
0.015
0.005
0
-0.005
0.5
0
-0.5
variável de controle - u2(k)
-0.01
limites da variável de controle
-1
-0.015
0
1
2
3
4
5
6
Tempo (s)
7
8
9
10
-1.5
0
1
(a)
2
3
4
5
6
Tempo (s)
7
8
9
10
(b)
Figura 4.67 – (a) Erro entre a saída real do pistão 2 e a trajetória de referência senoidal, sob
ação do GMV e ao utilizar a configuração do caso 5.
(b) Análise da variável de controle do eixo Z, “uz(k)”, com relação aos seus limites, quando
gerada pelo GMV e ao utilizar as configurações do caso 5 para seguir a trajetória de
referência senoidal.
A figura 4.68 mostra a trajetória circular no plano “XZ” resultante das trajetórias
co-senoidal no eixo “X” e senoidal no eixo “Z”.
132
0.2
referência
saída do sistema
tolerância de 2%
0.15
Posição da carga M2 no eixo "Z" (m)
0.1
0.05
0.04
0
0.035
-0.05
0.03
0.025
-0.1
0.02
0.015
-0.15
0.01
0.005
-0.2
-0.2
-0.15
-0.1
-0.05
0
0.05
Posição da carga M2 no eixo "X" (m)
0.1
0.15
0.2
0
-0.005
0.13
0.14
0.15
0.16
Posição da carga M2 no eixo "X" (m)
0.17
Figura 4.68 – Resposta do sistema hidráulico seguindo a trajetória circular no plano X Z,
sob ação do controlador GMV e utilizando as configurações do caso 5.
Finalmente, verifica-se que a configuração do caso 5 pode ser utilizada para as
três trajetórias, pois os resultados obtidos atendem a todas as especificações de
desempenho.
4.4 CONCLUSÃO
Na seção 4.2 foram apresentadas as trajetórias de referência utilizadas para testar a
capacidade de controle do controlador adaptativo do tipo GMV agindo sob a mesa de
coordenadas de dois graus de liberdade.
Foram apresentadas na seção 4.3 cinco configurações distintas denominadas de
casos e mostradas através da tabela 4.1, com o objetivo de verificar qual dessas
configurações faria com que o controlador em estudo controlasse a mesa de coordenadas
para que esta seguisse as três trajetórias de referência e ainda obedecesse às especificações
de desempenho. Na seqüência foram apresentados os resultados dessa análise, que de
forma resumida estão mostrados na tabela 4.7.
133
Tabela 4.7 – Resumo dos resultados da mesa de coordenadas sob ação do controlador
adaptativo do tipo GMV ao seguir as trajetórias de referência utilizando cinco
configurações distintas para o controlador.
Resumo dos resultados
Resultados da mesa de coordenadas
sob ação do controlador adaptativo do tipo GMV
ao seguir as seguintes trajetórias de referência
Configurações
utilizadas no
controlador
Polinomial cúbica
seguida de degrau
Circular
Em degraus
Caso 1
Obedeceu às
especificações de
desempenho
Obedeceu às
especificações de
desempenho
Não obedeceu às
especificações de
desempenho
Caso 2
----
----
Caso 3
----
Não obedeceu às
especificações de
desempenho
Caso 4
----
----
Caso 5
Obedeceu às
especificações de
desempenho
Obedeceu às
especificações de
desempenho
Obedeceu às
especificações de
desempenho, mas
u > umáx
Obedeceu às
especificações de
desempenho
Obedeceu às
especificações de
desempenho, mas
u > umáx
Obedeceu às
especificações de
desempenho
A regra de aplicação das configurações de cada caso nas trajetórias de referências
foi a seguinte: As configurações de um caso foram aplicadas para uma trajetória de
referência e foi verificado se os resultados desta obedeceram as especificações de
desempenho. Confirmando essa obediência, as configurações do referido caso foram
também aplicadas em outra trajetória de referência para que os seus resultados fossem
confrontados com as especificações de desempenho. Quando a obediência não foi
confirmada as configurações do referido caso não foram aplicadas a outra trajetória, mas
sim uma nova configuração foi utilizada para analisar novamente os resultados de cada
trajetória para a referida configuração, reiniciando todo o processo de análise. Tal atitude
foi tomada porque o objetivo é de obter uma configuração única para as três trajetórias,
então se as configurações de um caso falham para uma determinada trajetória não faz
134
sentido aplicar a referida configuração na(s) outra(s) trajetória(s). Essa rotina foi utilizada
até encontrar uma configuração para o controlador que pudesse fazer com que a mesa de
coordenadas seguisse as três trajetórias de referência obedecendo às especificações de
desempenho.
As configurações do caso 1, como mostram as tabelas 4.1 e 4.2, foram aplicadas
nas três trajetórias de referência, mas só foram obtidos resultados satisfatórios das
especificações de desempenho para a trajetória de referência polinomial cúbica seguida de
degraus e para trajetória de referência circular. Como prova dos resultados satisfatórios, os
sobre-sinais para essas duas trajetórias ficaram abaixo do especificado, “Mp ≤ 20%”, e o
tempo de acomodação não atingiu o tempo de 1s para o critério de 2%, como mostram as
figuras 4.8 e 4.11 para a trajetória de referência cúbica seguida de degrau, e as figuras 4.14
e 4.17 para a trajetória circular. Observou-se também que os valores das variáveis de
controle ficaram abaixo dos seus limites estabelecidos para essas duas trajetórias, como
mostram as figuras 4.12(b) e 4.18(b).
A qualidade dos resultados obtidos nas trajetórias cúbicas e circular não foi
mantida na trajetória de referência em degraus utilizando as configurações do caso 1. A
única especificação de desempenho que obedeceu às condições impostas ao longo da
trajetória em degraus foi o tempo de acomodação de 1s para o critério de 2%. O valor
máximo obtido foi de 0,65s na transição entre dois patamares de posicionamento da carga.
O sobre-sinal ficou acima dos 20% imposto pelas especificações de desempenho em
algumas transições dos patamares, tanto para o pistão 1 quanto para o pistão 2, como
mostram as figuras 4.21 e 4.24. Essa diferença de resultados entre a trajetória em degraus e
as outras trajetórias deve-se ao fato de que o controlador GMV tem uma grande agilidade
em ajustar a variável de controle para fazer com que a saída do sistema siga a trajetória de
referência. Essa agilidade do GMV deu bons resultados em trajetórias que possuem
variações pequenas entre os períodos de amostragem, como é o caso da trajetória cúbica e
a circular. Já para a trajetória em degraus, que possuem grandes variações no
posicionamento da carga entre alguns períodos de amostragem (transição entre os
patamares), o GMV faz com que os ajustes sejam realizados o mais rápido e o máximo
possível na variável de controle, com o objetivo de levar rapidamente a saída do sistema
para seguir a trajetória especificada. Essa agilidade no GMV provocou picos nos valores da
variável de controle nos instantes de variações bruscas, ocasionando por conseqüência
135
sobre-sinais acima do permitido na saída do sistema, mas em contra partida, obteve-se uma
rápida acomodação à trajetória.
Os bons resultados para as trajetórias de referência cúbica e circular foram obtidas
utilizando uma matriz de covariância inicial com valores da ordem de “107”, provocando
um grande estímulo na obtenção dos parâmetros do modelo a ser identificado.
Como nas configurações do caso 1 a única trajetória que não atendeu as
especificações de desempenho foi a trajetória em degraus, essa trajetória foi submetida às
configurações do caso 2, descriminadas pelas tabelas 4.2 e 4.3. A diferença entre as
configurações do caso 1 para o caso 2 está na matriz de covariância que possui elementos
de magnitudes diferentes na sua diagonal para este último caso. Esse tipo de matriz de
covariância estimulou distintamente os parâmetros a serem identificados, possibilitando
que o sistema seguisse a trajetória em degraus e ainda obedecessem às especificações de
desempenho em todos os patamares, como pode ser visto nas figuras 4.27 e 4.30. Essa
configuração causou um inconveniente nos valores da variável de controle, ultrapassando o
limite máximo imposto, como pode ser visto pelas figuras 4.28(b) e 4.31(b). Como a
variável de controle está relacionada com o deslocamento do carretel, esse alto valor da
variável de controle corresponde ao carretel ter ultrapassado os limites físicos da válvula
em estudo. Esse tipo de variação só é possível em simulações, visto que na prática o
deslocamento do carretel não pode ultrapassar as dimensões físicas da válvula. Por causa
desse inconveniente as configurações do caso 2 não foram testadas para as outras
trajetórias iniciando uma nova análise das trajetórias, agora com as configurações do caso
3.
A diferença entre as configurações do caso 2 para o caso 3 está no acréscimo de
uma restrição no valor da variável de controle para que este valor fique dentro dos seus
limites, como pode ser visto pelas tabelas 4.1 e 4.4. Como a variável de controle está
relacionada com o deslocamento do carretel da válvula, tal restrição foi adicionada para
fazer com que a simulação se aproximasse mais as condições da prática e com o intuito de
verificar se as dimensões da válvula escolhida iriam refletir positivamente ou não nos
resultados das trajetórias de referência.
Como a trajetória problemática até agora está sendo a trajetória em degraus, esta
foi escolhida para ser inicialmente analisada pelas configurações do caso 3. Os resultados
apresentaram-se satisfatórios, o que mostra que se for utilizada uma válvula com
dimensões menores que os valores da variável de controle, esse equipamento não irá
136
prejudicar o controlador, podendo até trazer benefícios. De acordo com as figuras 4.34(b) e
4.37(b) tal restrição gerou uma leve lentidão na adequação do sistema ao seguir a trajetória
de referência, provocando um leve aumento no tempo de acomodação, como mostra as
figuras 4.33 e 4.36, mas ainda assim ficou abaixo da metade do tempo determinado pela
especificação de desempenho e por causa disso observou-se uma considerável diminuição
nos sobre-sinais dos patamares. Portanto, para esse caso, o carretel escolhido não traz
prejuízos ao controlador, podendo ser perfeitamente aplicado.
Em nenhum momento houve a intenção de utilizar de um meio físico (válvula)
para melhorar as especificações de desempenho do sistema, mas sim de verificar se o
referido acessório iria trazer prejuízos para os resultados da perseguição do sistema às
trajetórias de referência.
Visto que as configurações do caso 3 satisfizeram a trajetória em degraus,
aplicaram-se também essas configurações para a trajetória polinomial cúbica seguida de
degrau. Os resultados obtidos para essa última trajetória não foram satisfatórios, como
mostram as figuras 4.39 e 4.42. Como o objetivo é de verificar a existência de uma
configuração única para as três trajetórias e para a atual situação, as configurações do caso
3 não permitiram que o sistema seguisse adequadamente a trajetória polinomial cúbica
seguida de degrau, as configurações do caso 3 não foram aplicadas à trajetória de
referência circular.
Novas configurações foram obtidas sendo estas denominadas de caso 4 e
representadas pelas tabelas 4.1 e 4.5. A diferença existente entre as configurações do caso
3 para o caso 4 é que para esta última utilizou-se valores iniciais nos vetores de parâmetros
estimados, obtidos por tentativa e erro, bem como uma matriz de covariância inicial com
os seus elementos da diagonal multiplicados por 100.
As configurações do caso 4 foram aplicadas à trajetória em degraus e observou-se,
através das figuras 4.45 e 4.48, que os critérios de sobre-sinal e tempo de acomodação
foram atendidos, e, através das figuras 4.46(b) e 4.49(b), observou-se que o valor da
variável de controle ultrapassou o seu valor máximo permitido. Como a variável de
controle está relacionada com o deslocamento do carretel e por esse valor máximo
corresponder aos limites físicos da válvula, tal ultrapassagem, corresponde ao
deslocamento do carretel ter superado os limites físicos da válvula. Devido a esse
inconveniente gerado, as configurações do caso 4 não foram aplicadas às outras trajetórias.
137
Para colocar a simulação mais próxima à realidade acrescentou-se nas
configurações do caso 4 uma restrição aos valores das variáveis de controle o que
corresponde utilizar a válvula em estudo com suas limitações no deslocamento do carretel.
Tal acréscimo de restrição gerou as configurações do caso 5.
As configurações do caso 5 foram aplicadas às três trajetórias, produzindo
resultados satisfatórios como mostram as figuras 4.50 até 4.68. Tal benefício se deve ao
fato de utilizar valores iniciais aos parâmetros que geraram um ganho K(t) praticamente
nulo, pois θt 1 $ θt representando uma melhora nas estimativas, como pode ser
vistos nas figuras, 4.50, 4.53, 4.56, 4.59, 4.62 e 4.65.
Portanto a mesa de coordenadas sob ação do controlador adaptativo auto-ajustável
do tipo GMV utilizando as configurações do caso 5 conseguiu seguir as três trajetórias de
referência obedecendo às especificações de desempenho impostas.
CAPÍTULO 5
- CONCLUSÃO FINAL
Neste trabalho apresentou-se um estudo sobre a simulação de uma mesa de
coordenadas de dois graus de liberdade, para posicionar uma carga num plano horizontal,
obedecendo às especificações de desempenho pré-estabelecidas e utilizando um
controlador adaptativo auto-ajustável composto pela lei de controle de Mínima Variância
Generalizada (GMV), definido por ISERMANN et al (1992) e pelo algoritmo de estimação
de parâmetros dos Mínimos Quadrados Recursivos (MQR).
Uma introdução sobre sistemas hidráulicos foi apresentada bem como as leis da
física que possibilitaram a obtenção de um modelo matemático linear para um atuador
hidráulico simétrico de dupla ação, comandado por uma válvula do tipo carretel com
quatro vias e quatro ressaltos de centro crítico. Os valores dos parâmetros do sistema em
estudo foram apresentados, e a partir deles determinaram-se as equações do modelo
matemático linear que representam o sistema real, mostrados pelas equações (3.7) e (3.8).
A mesa de coordenadas é composta pelo cilindro 1, que é o responsável por
movimentar a carga na direção do eixo “X” e pelo cilindro 2, que movimenta a carga na
direção do eixo “Z”. Além do modelo considerado como real utiliza-se outro modelo, o
estimado, identificado pelo MQR com ordem inferior ao modelo considerado como real.
Através dos valores obtidos do coeficiente de correlação múltipla observou-se que o
modelo estimado possui características dinâmicas similares ao modelo considerado real,
validando a utilização do mesmo.
De posse dos valores dos parâmetros do sistema identificado e das informações
sobre a teoria do GMV, apresentadas no apêndice A, obteve-se a equação da lei de controle
do referido controlador, representada pela equação (3.28). A referida lei de controle tem
139
como objetivo minimizar uma função custo, representada pela equação (A.43), composta
pelo sinal de referência, pelas variáveis auxiliares e uma constante “r” que pondera a
variável de controle.
No apêndice A, conceitos sobre sistemas de controle foram explanados bem como
a descrição sobre modelagem e identificação de sistemas. O algoritmo dos mínimos
quadrados recursivos (MQR) foi descrito. Informações sobre controladores adaptativos
foram apresentadas dando-se ênfase ao GMV.
Com intuito de analisar a eficiência do GMV agindo sobre a mesa de coordenadas
em estudo, foram utilizadas três trajetórias de referência distintas: a trajetória polinomial
cúbica seguida de degrau, a trajetória circular e a trajetória em degraus, a serem seguidas
pela carga do sistema, obedecendo às especificações de desempenho pré-definidas.
Objetivando utilizar uma configuração única do controlador para fazer com que a
mesa de coordenadas de dois graus de liberdade seguisse às três trajetórias de referências
obedecendo às especificações de desempenho, foram apresentadas cinco configurações
distintas denominadas de casos, como foi mostrado pela a tabela 4.1.
Os resultados da atuação do GMV sobre a mesa de coordenadas para seguir as três
trajetórias utilizando as configurações dos cinco casos distintos foram apresentados através
das curvas experimentais do desempenho do sistema, da variável de controle, dos
parâmetros estimados do sistema, do erro de estimação e de forma resumida pela tabela
4.7.
Foram iniciadas as análises dos resultados do sistema hidráulico ao utilizar as
configurações para o caso 1, onde tais configurações foram apresentadas pelas tabelas 4.1 e
4.2. A diferença principal do caso 1 para os outros está na magnitude inicial dos elementos
da matriz de covariância que foram na ordem de “107”. Tal ajuste permitiu alto estímulo na
estimação dos parâmetros do modelo estimado produzindo resultados que obedeceram às
especificações de desempenho (máximo sobre-sinal de 20% e tempo de acomodação
máximo de 1s para o critério de 2%) para a trajetória polinomial cúbica seguida de degrau
e para a trajetória circular. Os resultados referentes à trajetória polinomial cúbica seguida
de degrau, utilizando as configurações do caso 1, foram apresentados pelas figuras de 4.7
até 4.12 e para esse mesmo caso os resultados referentes à trajetória circular foram
apresentados pelas figuras de 4.13 até 4.19. O caso 1 não foi considerado adequado para as
três trajetórias porque os resultados da trajetória em degraus não atenderam às
especificações de desempenho, como foi mostrado pelas figuras de 4.20 até 4.25. A
140
trajetória em degraus tem uma característica que é de migrar de um patamar para outro de
forma brusca, gerando no controlador valores altos para a variável de controle. Tal atitude
do controlador teve com o objetivo ajustar o mais rápido e o máximo possível a saída do
sistema para fazer com que a carga seguisse a referida trajetória. Aliando esse
comportamento do controlador ao alto estímulo dado aos valores iniciais da matriz de
covariância, geraram-se picos nos valores da variável de controle para ambos os pistões,
como foi mostrado pelas figuras 4.22(b) e 4.25(b), ultrapassando os limites especificados
pela tabela 3.1. Tal comportamento gerou também sobre-sinais acima das especificações
de desempenho em alguns dos patamares da trajetória para ambos os pistões, como foi
mostrado pelas figuras 4.21 e 4.24.
Como as configurações do caso 1 só deram bons resultados para as trajetórias
polinomial cúbica seguida de degrau e para a circular utilizou-se uma nova configuração
para a trajetória em degraus, a do caso 2.
Os resultados do sistema ao utilizar as configurações do caso 2 para seguir a
trajetória em degraus geraram valores da variável de controle acima dos valores máximos
especificados pela tabela 3.1. Portanto o referido caso foi considerado inadequado para ser
utilizado nas três trajetórias, mas teve sua importância por servir de base para a
determinação das configurações do caso 3.
A configuração do caso 3, representada pelas tabelas 4.1 e 4.4, diverge dos outros
casos principalmente em dois aspectos. A primeira diferença é a matriz de covariância
inicial que foi gerada com elementos na sua diagonal de magnitudes distintas, o que
possibilitou um estímulo diferenciado nos parâmetros do modelo estimado. A segunda
diferença produziu uma maior aproximação da simulação à realidade ao acrescentar no
programa uma restrição no valor da variável de controle, pois a referida variável está
relacionada com o deslocamento do carretel da válvula, podendo-se dizer que esta restrição
corresponde em utilizar um carretel que possui o seu deslocamento limitado às dimensões
físicas da válvula escolhida.
Os resultados ao utilizar as configurações do caso 3 foram inicialmente analisados
para o sistema ao seguir a trajetória em degraus. A restrição diminuiu a velocidade de
adaptação da variável de controle provocando uma leve lentidão no GMV como foi
mostrado pelas figuras 4.34(b) e 4.37(b). As restrições aliadas à matriz de covariância do
caso 3 provocaram uma evolução mais suavizada dos parâmetros do modelo estimado e
um pequeno aumento no tempo de acomodação de alguns patamares, refletindo
141
favoravelmente no sobre-sinal da saída do sistema para a trajetória em degraus sem
ultrapassar os limites das especificações de desempenho, como foi visto nas figuras 4.32,
4.33, 4.35 e 4.36. Na tentativa de obter uma configuração única para as três trajetórias, as
considerações do caso 3 foram utilizadas para a trajetória polinomial cúbica seguida de
degrau, mas não trouxeram resultados satisfatórios, pois se gerou um retardamento nas
respostas não permitindo um acompanhamento adequado do sistema à trajetória cúbica,
como foi visto nas figuras 4.38 até 4.43. Por este motivo o caso 3 não foi considerado
adequado para fazer com que o sistema hidráulico siga as três trajetórias.
Os resultados do sistema ao utilizar as configurações do caso 4 para seguir a
trajetória em degraus, igualmente ao caso 2, geraram valores da variável de controle acima
dos valores máximos especificados pela tabela 3.1. Portanto o caso 4 foi considerado
inadequado para ser utilizado nas três trajetórias, mas serviu de base para geração das
configurações do caso 5.
As configurações do caso 5, representadas pelas tabelas 4.1 e 4.6, diferenciam-se
dos outros casos em três aspectos fundamentais. A principal diferença foi o vetor de
parâmetros do modelo estimado com valores iniciais obtidos por tentativa e erro após
análises das respostas dos casos anteriores. A segunda diferença foi a utilização da matriz
de covariância com a magnitude dos seus elementos multiplicados por 100,
correspondendo um leve estímulo na identificação de todos os parâmetros do modelo
estimado, já que os valores iniciais desses parâmetros foram fornecidos. A terceira
diferença é a restrição na variável de controle utilizada nas configurações do caso 3
impedindo que os valores da referida variável ultrapasse os limites impostos pela tabela
3.1. Como a variável de controle está relacionada com o deslocamento do carretel da
válvula, tal restrição corresponde em utilizar uma válvula com limitações no deslocamento
do carretel com objetivo de verificar se a válvula escolhida afeta positivamente ou não nos
resultados do sistema para obedecer às especificações de desempenho.
Os resultados do sistema hidráulico sob ação do GMV utilizando as configurações
do caso 5 atenderam a todas as especificações de desempenho ao seguir as três trajetórias
de referência. Com relação à evolução dos valores dos parâmetros do modelo estimado
quase não houve variação em todas as trajetórias, mostrando uma boa aproximação aos
parâmetros reais, foi vistos pelas seguintes figuras: 4.50 e 4.53 referentes à trajetória em
degraus, 4.56 e 4.59 referente à trajetória polinomial cúbica seguida de degrau e 4.62 e
4.65 referente à trajetória circular. Os valores das variáveis de controle para a trajetória
142
polinomial cúbica, mostrados pelas figuras 4.58(b) 2 4.61(b), e para trajetória circular,
mostrados pelas figuras 4.64(b) e 4.67(b), ficaram bem abaixo dos limites especificados, já
para a trajetória em degraus esses valores ficaram restritos aos limites especificados, como
foi mostrado pelas figuras 4.52(b) e 4.55(b). A restrição nos valores da variável de controle
provocou um leve retardo na saída do sistema ao seguir a trajetória em degraus mesmo
assim os resultados atenderam as especificações de desempenho gerando uma grande
redução nos sobre-sinais como foi mostrado pelas figuras 4.51 e 5.54. Como foi visto pelas
figuras 4.57 e 4.60 para a trajetória polinomial cúbica seguida de degraus e pelas figuras
4.63, 4.66 e 4.68 para a trajetória circular, o sistema hidráulico seguiu adequadamente as
referidas trajetórias atendendo às especificações de desempenho. A partir desses
resultados, o caso 5 foi o único que fez com que o GMV controlasse o sistema hidráulico
para que este seguisse as trajetórias de referências obedecendo às especificações de
desempenho.
Fazendo uma análise dos resultados por tipo de trajetória, observou-se que o
sistema hidráulico em estudo sob ação do GMV seguiu a trajetória polinomial cúbica
seguida de degrau e a trajetória circular obedecendo às especificações de desempenho ao
utilizar as configurações do caso 1 e do caso 5, e seguiu a trajetória em degraus também
obedecendo às especificações de desempenho quando as configurações do caso 3 e caso 5
foram utilizadas. Esses resultados foram mostrados de forma resumida pela tabela 4.7.
Por fim, pode-se considerar que a utilização do GMV para controlar o sistema
hidráulico em estudo foi uma escolha adequada, como foi mostrado pelos resultados
gerados com as configurações do caso 5, por fazer com que o referido sistema seguisse as
trajetórias de referência obedecendo às especificações de desempenho.
Como sugestão para trabalhos futuros pode-se analisar um determinado sistema
para ser controlador por diversas combinações de controladores adaptativos auto-ajustável.
Analisando os resultados do sistema em estudo ao utilizar uma combinação de 3 tipos
distintos de algoritmos de estimação de parâmetros com 3 leis de controle. Pode-se
também utilizar um sistema hidráulico de três graus de liberdade a fim de efetuar análises
comparativas mediante o uso de diversos tipos de controladores.
REFERÊNCIAS BIBLIOGRÁFICAS
ANDRIGHETTO,
P.,
Posicionador
Eletro-Hidráulico
Controlado
por
Válvula
Proporcional Direcional. Dissertação de Mestrado. Universidade Federal de Santa
Catarina, Florianópolis/SC, 1996.
AGUIRRE, L. A., Introdução à Identificação de Sistemas: Técnicas lineares e não-
lineares aplicadas a sistemas reais. 3ª ed., Editora UFMG, Belo Horizonte/MG,
2007.
AGUIRRE, L. A. (Ed.), Enciclopédia de Automática: Controle & Automação. 1 v., 2 v. e
3 v., 1ª ed., Blucher, São Paulo/SP, 2007b.
ÅSTRÖM, K. J., Introduction to Stochastic Control Theory, Academic Press, New York,
1970.
ÅSTRÖM, K. J. e WITTENMARK, B., On Self Tuning Regulators, Automatica, 9, 1973.
ÅSTRÖM, K. J. e WITTENMARK, B., Adaptive Control. 2a ed., Ed. Addison Wesley
Publishing Company, Inc, New York, 1995.
ATTIÉ, S. S., Automação Hidráulica e Pneumática Empregando a Teoria de Sistemas a
Eventos Discretos, Dissertação de Mestrado. Universidade Federal de Santa
Catarina: Florianópolis/SC, 1998.
CABEZAS, J. G. H. L., Fundamentos Básicos da Hidráulica, Editora IICA, Campos/RJ,
1983.
144
CARMO, P. F., Válvulas Direcionais Proporcionais, com Efeito de Vazamento,
Dissertação de Mestrado. Universidade Federal de Santa Catarina: Florianópolis/SC,
2003.
COELHO, A. A. R. e COELHO, L. S., Sistemas Dinâmicos e Lineares. 1ª ed., Editora da
UFSC, Florianópolis/SC, 2004.
CUNHA, M. A. B.; Controle em Cascata com Adaptação de Parâmetros Aplicados a um
Atuador Hidráulico. Dissertação de Mestrado. Universidade Federal de Santa
Catarina: Florianópolis/SC, 1997.
CUNHA, M. A. B., Controle em Cascata de um Atuador Hidráulico: Contribuições
Teóricas e Experimentais. Tese de Doutorado. Universidade Federal de Santa
Catarina: Florianópolis/SC, 2001.
CUNHA, M. A. B.; GUENTHER, R.; DE PIERI, E. R., Robustness Analysis of Cascade
Controller Applied to a Hydraulic Actuator with Uncertain Parameters. XII
Congresso Chileno de Ingeniería Eléctrica, Temuco, Chile, 1997.
CUNHA, M. A. B.; GUENTHER, R.; DE PIERI, E. R., Controle em Cascata com
Adaptação de Parâmetros Aplicado a um Atuador Hidráulico. XII Congresso
Brasileiro de Automática. p. 211-216, Uberlândia/MG, 1998.
CUNHA, M. A. B.; GUENTHER, R.; DE PIERI, E. R., O Controle de Força em
Atuadores Hidráulicos. Congresso Nacional de Engenharia Mecânica. Anais.
Natal/RN, 2000a.
CUNHA, M. A. B.; GUENTHER, R.; DE PIERI, E. R.; DE NEGRI, V. J., A Cascade
Strategy using Nonlinear Control Techniques Applied to a Hydraulic Actuator.
Proceedings of the 1st Fluid Power Net International – PhD Symposium, p.57-70,
Hamburgo, 2000b.
145
CUNHA, M. A. B.; GUENTHER, R.; DE PIERI, E. R.; DE NEGRI, V.J., A Fixed
Cascade Controller Applied to a Hydraulic Actuator Including the Servovalve
Dynamic. Power Transmission and Motion Control. Ed C.R. Burrows; K.A. Edge
(University of Bath). Suffolk: Professional Engineering Publishing, p. 59-72, 2000c.
CUNHA, M. A. B.; GUENTHER, R.; DE PIERI, E. R.; DE NEGRI, V. J. Controle de um
Atuador Hidráulico Usando Linearização por Realimentação e a Técnica do
Backstepping.
XII
Congresso
brasileiro
de
automática,
p.
1060-1065,
Florianópolis/SC, 2000d.
CUNHA, M. A. B.; GUENTHER, R.; DE PIERI, E. R.; DE NEGRI, V. J., Design of
cascade controllers for a hydraulic actuator. International Journal of Fluid Power,
No.2 pp.35-46, 3, 2002.
DE NEGRI, V. J., Modelagem de Servomecanismos Hidráulicos e Simulação de um
Servomecanismo Mecânico-Hidráulico, Dissertação de Mestrado. Universidade
Federal de Santa Catarina: Florianópolis/SC, 1987.
DORF, R. C.; BISHOP, R. H., Sistemas de Controle Moderno. 8ª ed., Editora LTC, Rio de
Janeiro/RJ, 2001.
FURST, F. L., Sistematização do Projeto Preliminar de Circuitos Hidráulicos com
Controle de Posição. Dissertação de Mestrado. Universidade Federal de Santa
Catarina: Florianópolis/SC, 2001.
GUENTHER, R.; DE PIERI, E. R., Cascade Control of the Hydraulic Actuators. Revista
Brasileira de Ciências Mecânicas, Rio de Janeiro, v.19, n.2, p.108-120, 1997.
GUENTHER, R.; DE PIERI, E. R.; CUNHA, M. A. B., Variable Structure Adaptive
Cascade Control of the Hydraulic Actuators. Technical report - UFSC,
Florianopolis/SC, 1998a.
146
GUENTHER, R.; CUNHA, M. A. B.; DE PIERI, E. R., Experimental Implementation of
the Variable Structure Adaptive Cascade Control for Hydraulic Actuators. Power
Transmission and Motion Control, Bath, England, p. 349-361, 1998b.
GUENTHER, R.; CUNHA, M. A. B.; DE PIERI, E. R.; DE NEGRI, V. J., VS-ACC
Applied to a Hydraulic Actuator. Proceedings of American Control Conference,
Chicago, p.4124-4128, 2000.
ISERMANN, R; LACHMANN, K.-H.; MATKO, D., Adaptive Control Systems. 1ª ed., Ed.
Prentice Hall, Grã-Betanha, 1992.
HESSE, Stefan, 99 Exemplos de Aplicações Pneumáticas, Germay: Festo AG & Co., 2001.
LINSINGEN, I. V., Fundamentos de Sistemas Hidráulicos. 2ª ed. Florianópolis/SC:
Editora UFSC, 2003.
LOPOES, L. G., Controle a Estrutura Variável Aplicado a um Atuador Hidráulico.
Dissertação de Mestrado. Universidade Federal de Santa Catarina. Florianópolis/SC,
2007.
MACHADO, C. L. D' ELIA, Compensação de Atrito em Atuadores Hidráulicos Utilizando
Redes Neurais. Dissertação de Mestrado. Universidade Federal de Santa Catarina:
Florianópolis/SC, 2003.
MEJÍA, R. I. G., Controle Preditivo Multivariável: Aspectos de Projeto e Simulação.
Dissertação de Mestrado. Universidade Federal de Santa Catarina: Florianópolis/SC,
2003.
MERRITT, H. E., Hydraulic Control System. New York, John Wiley & Sons, 1967.
MONTENEGRO, P. H. M., Controle de Temperatura em um Túnel de Combustão.
Dissertação de mestrado. Universidade Federal da Paraíba, João Pessoa/PB, 2003.
147
MONTENEGRO, P. H. M., Controle de Temperatura de Ar em um Túnel Psicrométrico
por Meio de Técnicas Adaptativas. Tese de Doutorado. Universidade Federal da
Paraíba, João Pessoa/PB, 2007.
OGATA, K., Engenharia de Controle Moderno. 4ª ed., Prentice Hall, São Paulo/SP, 2003.
OLIVEIRA, M. A., Controle PID Preditivo para Plantas com Atraso de Transporte:
Estudo de Caso em um Laminador. Dissertação de Mestrado. Universidade Federal
de Santa Catarina: Florianópolis/SC, 2004.
PAIM, C. C., Técnicas de Controle Aplicadas a um Atuador Hidráulico. Dissertação de
Mestrado. Universidade Federal de Santa Catarina: Florianópolis/SC, 1997.
PEREIRA, P. I. I., Análise Teórico-experimentais de Controladores para Sistemas
Hidráulicos. Dissertação de Mestrado. Universidade Federal de Santa Catarina,
Florianópolis/SC, 2006.
PETERKA, V., Adaptive Digital Regulation of Noisy Systems, Proceedings of 2nd IFAC
Symposium on Identification and Process Parameter Estimation, Paper 6.2, Praga,
1970.
ROMÃO, W., Análise e Projeto de Controladores PID Adaptativos Baseados em
Estimação de Parâmetros: Um Estudo de Caso. Dissertação de Mestrado.
Universidade Federal de Santa Catarina, Florianópolis/SC, 1996.
RIUL, J. A., Controladores Neurais e Híbrido Aplicados em uma Carga Acionada por um
Atuador Hidráulico. Tese de Doutorado. Universidade Federal da Paraíba: João
Pessoa/PB, 2000.
RÚBIO, F. R.; SÁNCHEZ, M. J. L., Control Adaptivo y Robusto. 1ª ed., Secretariado de
Publicaciones de la Universidad de Sevilla, Sevilla, 1996.
148
SANTOS, J. E. S., Critérios de Desempenho e Aspectos de Robustez na Síntese de
Controladores Preditivos Adaptativos, Dissertação de Mestrado. Universidade
Federal de Santa Catarina: Florianópolis/SC, 1998.
SOUZA, A. D. C., Desenvolvimento de um Sistema para Dimensionamento e Controle de
Posicionadores Hidráulico. Dissertação de Mestrado. Universidade Federal de Santa
Catarina: Florianópolis/SC, 2005.
SPONG, W. M., VIDYASAGAR, M., Robot Dynamics and Control. John Wiley & Sons,
Republic of Singapore, 1989.
STREETER, V. L., WYLIE, E. B., Mecânica dos Fluidos. 7ª ed., McGraw-Hill, São
Paulo/SP, 1982.
SZPAK, RODRIGO, Análise Teórico-Experimental do Comportamento das Pressões em
Posicionadores Hidráulicos. Dissertação de Mestrado. Universidade Federal de Santa
Catarina: Florianópolis/SC, 2008
PEREIRA, P. I. I., Análise Teórico-Experimental de Controladores para Sistemas
Hidráulicos. Dissertação de Mestrado. Universidade Federal de Santa Catarina:
Florianópolis/SC, 2006.
VALDIERO, A. C., Controle de Robôs Hidráulicos com Compensação de Atrito. Tese de
Doutorado. Universidade Federal de Santa Catarina, Florianópolis/SC, 2005.
VAZ, G. L. F., Controladores Adaptativos de Variância Mínima e Dahlin: Uma Revisão e
Novas Concepções de Projeto. Universidade Federal de Santa Catarina,
Florianópolis/SC, 1999.
APÊNDICE A
- SISTEMAS DE CONTROLE
A.1 INTRODUÇÃO
O aprimoramento dos sistemas de controle automático é de suma importância para
a evolução da tecnologia. O desenvolvimento nessa área significa para as indústrias melhor
desempenho produtivo, redução no número de operações manuais, aumento da
produtividade e, conseqüentemente, redução dos preços dos produtos.
Os sistemas de controle automático atualmente são fundamentais nos
desempenhos de diversos sistemas tais como: veículos espaciais que utilizam no seu
comando o piloto automático; sistemas robóticos e de direcionamento de mísseis, e em
diversos campos industriais, principalmente nos processos de fabricação cujos produtos
devem ter um bom controle de qualidade.
Segundo DORF e BISHOP (2001) um sistema de controle é uma interconexão de
componentes formando uma configuração de sistema que produzirá uma resposta desejada
do sistema.
Este apêndice tem como objetivo apresentar a teoria sobre controle necessária
para o desenvolvimento da lei de controle do controlador de Variância Mínima
Generalizada (GMV) definida por ISERMANN et al (1992).
A seção A.2 apresenta definições básicas para o entendimento sobre controle. Na
seção A.3 são apresentados os tipos de modelos mais utilizados bem como conceitos
relativos à teoria de modelagem
Na seção A.4 são apresentadas informações sobre identificação de sistemas.
150
A seção A.5 é apresenta a teoria necessária para a determinação do algoritmo do
estimador de parâmetros dos mínimos quadrados recursivos (MQR), bem como os
procedimentos utilizados na validação de modelos estimados.
Os principais controladores adaptativos são apresentados na seção A.6, dando
ênfase ao controlador auto-ajustável (STR). Para este detalhou-se a lei de controle do
controlador de variância mínima generalizada (GMV).
A.2 DEFINIÇÕES BÁSICAS PARA O ENTENDIMENTO SOBRE CONTROLE
Para auxiliar o entendimento sobre sistemas de controle, algumas definições serão
apresentadas, baseadas em OGATA (2003), AGUIRRE, (2007), AGUIRRE, (2007b) e em
DORF e BISHOP, (2001).
Sistema: Um sistema é a combinação de componentes que agem em conjunto
para atingir determinado objetivo.
Controle: É o ramo do conhecimento que estuda maneiras sistemáticas de
descrever sistemas e de sintetizar ações tais que esses sistemas se comportem de maneira
previamente determinada.
Sistema a controlar: Um sistema a controlar pode ser parte de um equipamento
ou apenas um conjunto de componentes de um equipamento que funcione de maneira
integrada, com o objetivo de realizar determinada operação.
Variável controlada e variável manipulada: A variável controlada é a grandeza
ou a condição que é medida e controlada. A variável manipulada é a grandeza ou a
condição modificada pelo controlador, de modo que afete o valor da variável controlada.
Normalmente, a variável controlada é a saída do sistema.
Controlar: significa medir o valor da variável controlada do sistema e utilizar a
variável manipulada ao sistema para corrigir ou limitar os desvios do valor medido a partir
de um valor desejado.
Distúrbio: Um distúrbio é um sinal que tende a afetar de maneira adversa o valor
da variável de saída de um sistema.
Controle com realimentação: Controle com realimentação ou de malha fechada
refere-se a uma operação que, na presença de distúrbios, tende a diminuir a diferença entre
a saída de um sistema e alguma entrada de referência, e atua com base nessa diferença.
Processo: Toda operação a ser controlada.
151
Um sistema a ser controlado pode ser representado por um bloco como mostrado
na figura A.1, onde a relação de entrada-saída representa uma relação de causa e efeito do
sistema que, por sua vez, representa um processamento de um sinal de entrada para
fornecer um sinal de saída variável. Um sistema de controle a malha aberta utiliza um
controlador ou atuador de controle para obter a resposta desejada, como mostra a figura
A.2. Um sistema de malha fechada utiliza uma medida adicional da saída real (sinal de
retroação) a fim de compará-la com a resposta desejada, usando a diferença como meio de
controle. A diferença entre a saída do sistema sob controle e a referência de entrada é
usada para controlar o sistema de forma a minimizá-la continuamente, como mostra a
figura A.3 (DORF e BISHOP, 2001).
Entrada
Saída
Sistema
Figura A.1 – Sistema a ser controlado.
Resposta
desejada
Controlador
Saída
Sistema
Figura A.2 – Sistema de controle a malha aberta.
Resposta
desejada
Comparação
Controlador
Sistema
Saída
Medição
Figura A.3 – Sistema de controle a malha fechada.
A.3 MODELAGEM MATEMÁTICA
Modelagem é a área do conhecimento que estuda a maneira de desenvolver e
implementar um modelo matemático de um sistema real, que represente os seus aspectos
essenciais, de forma adequada para uma utilização particular (diagnóstico, supervisão,
otimização, controle). O modelo de um sistema pode ser matemático, onde uma equação
152
matemática representa algumas características do mesmo, e pode ser utilizado para
responder a questões sobre esse sistema, sem a realização de experimentos. Existem vários
métodos de modelagem. Em alguns casos o modelo de um sistema pode ter uma
representação gráfica.
A.3.1 Tipos de modelos
A seguir serão listados os modelos matemáticos mais utilizados.
Modelos estáticos e dinâmicos: Os modelos estáticos são utilizados quando as
variáveis do sistema são relacionadas sem terem dependência com o tempo, sendo
representados por equações algébricas. Sua aplicação é viável quando a dinâmica (variação
no tempo) de um sistema real não é relevante. Já os modelos dinâmicos são usados quando
a evolução temporal de um sistema é desejada e são descritos por equações diferenciais ou
a diferenças, sendo que tais modelos podem também incluir equações algébricas.
Modelos discretos e contínuos: Os modelos dinâmicos contínuos representam a
evolução do sistema ao longo do tempo e são descritos por equações diferenciais,
diferentemente dos modelos dinâmicos discretos que representam a evolução do sistema
em instantes de tempos igualmente espaçados e são descritos por equações a diferenças.
Modelos autônomos e não autônomos: Diz-se que um modelo é autônomo
quando este não depende explicitamente do tempo e não possui sinais de entrada gerais,
caso contrário é denominado de não autônomo.
Modelos monovariáveis e multivariáveis: Os modelos monovariáveis, também
conhecidos como SISO (single input, single output), são aqueles que relacionam uma
entrada para uma saída, representando a relação causa e efeito de apenas um par de
variáveis. Um modelo com mais de uma entrada ou mais de uma saída é denominado
multivariável e são classificados como segue: MISO (multiple inputs, single output)
modelos de múltiplas entradas e uma saída, SIMO (single input, multiple outputs) modelos
com uma única entrada e mais de uma saída e MIMO (multiple input, multiple outputs)
modelos com mais de uma entrada e mais de uma saída.
Modelos determinísticos e estocásticos: Os determinísticos são modelos nos
quais não são modeladas as incertezas, ou seja, as variáveis e parâmetros são tratados como
sendo determinísticos. Já nos modelos estocásticos as incertezas (presentes em qualquer
situação real) são modeladas na forma de variáveis aleatórias.
153
Modelos paramétricos e não-paramétricos: Segundo AGUIRRE (2007), são
denominados paramétricos aqueles modelos que tiverem parâmetros, ou seja, números,
coeficientes que os caracterizem. Por outro lado, modelos não-paramétricos serão
representações gráficas (que não têm parâmetros).
A.3.2 Tipos de modelagem matemática
Existem duas maneiras de elaboração de modelos matemáticos, a saber:
Modelagem caixa branca: por esse método o modelo matemático de um sistema
é obtido a partir de uma análise físico-matemática dos fenômenos envolvidos e, para tal é
necessário estar bem familiarizado com o sistema a ser modelado. Este procedimento
também é conhecido como modelagem fenomenológica ou conceitual, modelagem pela
física ou natureza do sistema.
Modelagem caixa preta: é um método alternativo de obter o modelo matemático,
que se baseia na análise experimental (medidas ou observações) do sistema. Ao contrário
da técnica anterior, pouco ou nenhum conhecimento prévio do sistema é necessário para a
obtenção do modelo. Tais métodos são também denominados de identificação caixa preta
ou ainda modelagem empírica. A área que estuda esta metodologia é denominada de
identificação de sistemas.
Essas metodologias permitem obter modelos que representam a dinâmica do
sistema (processo ou planta), ou seja, a evolução temporal do sistema. Para fins de controle
de sistemas, não se pretende encontrar um modelo matemático exato, mas um modelo
adequado para uma determinada aplicação (COELHO e COELHO, 2004). A adequação de
modelos faz-se a partir de algumas considerações simplificadoras, tais como:
Linearidade: Essa consideração é feita supondo que o sistema a ser modelado
tem um comportamento aproximadamente linear, pelo menos numa faixa estreita de
operação. Para que um sistema seja considerado linear este deve satisfazer o princípio da
superposição4. Embora esse princípio simplifique muito o modelo a ser desenvolvido, há
situações em que essa consideração não é adequada, como em sistemas com dinâmica
4
Princípio da superposição: Seja um sistema que ao ser excitado pela entrada u1(t) produz a saída y1(t). O
mesmo sistema quando excitado por u2(t) produz y2(t). Se tal sistema satisfaz o princípio da superposição
(ele é um sistema linear), então quando excitado por a.u1(t) + b.u2(t), o sistema produz a.y1(t) + b.y2(t)
(AGUIRRE, 2007).
154
fortemente bilinear e no caso em que se deseja estudar características dinâmicas nãolineares do sistema.
Invariância no tempo: Essa consideração implica que o comportamento do
sistema modelado não varia com o tempo. Isto não significa que as variáveis do sistema
tenham valores constantes (que o sistema está estático), mas que a evolução temporal
dessas variáveis é determinada por uma lei. Essa lei é referida como sendo a dinâmica do
sistema. Portanto, um modelo matemático pode representar a dinâmica de um sistema
quando esta não se altera significativamente no período de tempo em que o sistema é
considerado. A modelagem é bastante simplificada com essa consideração, mas
infelizmente, a maioria dos sistemas reais varia ao longo do tempo, seja em função de
flutuações de variáveis que afetam a sua operação, seja como conseqüência de
envelhecimento ou simplesmente devido a uma forma diferente de operação (AGUIRRE,
2007).
Concentração de parâmetros: A consideração de concentração de parâmetros
resulta em equações diferenciais ordinárias (ao invés de equações diferenciais parciais,
para o caso de sistemas a parâmetros distribuídos). Esse tipo de representação pressupõe
que as variáveis de interesse variam apenas com o tempo e em um único ponto do espaço.
(AGUIRRE, 2007).
Princípio da parcimônia: se traduz na utilização do menor número possível de
parâmetros. Este compromisso é o centro do problema de identificação e tem considerável
efeito sobre a qualidade do modelo identificado (MONTENEGRO, 2007).
A.3.3 Representações de modelos lineares
Existem diversas formas de representar matematicamente os modelos lineares,
sendo uma das mais usadas, a função de transferência que é definida como a transformada
da resposta ao impulso “h(t)” do sistema, para condições iniciais nulas.
Uma das representações é a transformada de Laplace, que é utilizada quando a
resposta ao impulso é contínua no tempo, sendo sua função de transferência dada por
“H(s)”.
Um sinal “x(t)” tem a seguinte transformada de Laplace: L
155
X(s) = L{x(t)} = ∫0 x ( t )e− st dt
∞
(A.1)
onde:
x(t) – uma função de tempo em que “x(t) = 0” para “t < 0”;
s – uma variável complexa (“s = σ + ωj”, onde: “σ” - parte real e “ω” - parte imaginária);
L – símbolo operacional que indica que será utilizada a transformada de Laplace na
grandeza que ele antecede;
X(s) – transforma de Laplace de “x(t)”.
A transformada inversa de Laplace é designada por “L -1” e representada por:
x(t) = L-1 {X (s)} =
1
2π j
∫
σ+∞ j
σ−∞ j
X (s) est ds , para t > 0
(A.2)
A função de transferência de um sistema é a relação entre a transformada de
Laplace da saída, “Y(s)”, pela transformada de Laplace da entrada, “U(s)”, ou seja,
H (s) = Y (s)
(A.3)
U (s)
é uma razão de dois polinômios em s e está representada por:
H (s) = B(s)
(A.4)
A (s)
onde:
nb
B(s) = ∑ b j s j
j= 0
na
;
A(s) = ∑ a i si
(A.5)
i=0
sendo “n=na” a ordem do sistema, “ana = 1” e “n ≥ nb”. Os elementos {bj, ai, n} com “j∈[0,
nb]” e “i∈[0, na]” são desconhecidos e devem ser determinados analiticamente ou
156
estimados. Algumas vezes assume-se que o valor de “n” é conhecido antecipadamente
(COELHO e COELHO, 2004).
Quando a resposta ao impulso é discreta no tempo usa-se a transformada “Z” de
“h(k)”, que tem a função de transferência representada por “H(z)”, para condições iniciais
nulas. Define-se transformada “Z” de uma seqüência “x(k)” como:
k =0
∑ x (k ) z
X(z) = Z{x (k )} =
−k
(A.6)
k =−∞
A transformada “Z” inversa é designada por “Z-1” e representada por:
x (k ) = Z−1{X(z)} =
1
X(z)z k −1dz
∫
2π j
(A.7)
onde ∫ é uma integral fechada, no sentido anti-horário, centrada na origem.
Analogamente ao “H(s)” o “H(z)” é representado como quociente de dois
polinômios, agora, em “z”.
Outro tipo de representação é a transformada de Fourier, que obtém “H(jω)”, a
resposta em freqüência do sistema. Define-se a transformada de Fourier (designada por
“F”) de um sinal “x(t)” como:
X ( jω) = F{x ( t )} =
∫
∞
−∞
x ( t ) e − jω t dt
(A.8)
onde “ j = − 1 ”. A transformada inversa de Fourier é designada por “F-1” e representada
por:
x(t ) = F−1{X( jω)} =
1 ∞
X( jω)e jωt dω
∫
−
∞
2π
(A.9)
157
Substituindo “s” por “jω” em “H(s)” obtém-se diretamente “H(jω)”. A
transformada discreta de Fourier “H(e j )” pode ser analogamente obtida, substituindo “z”
ω
por “e j ” em “H(z)”.
ω
A representação de modelos lineares em espaço de estado é outra alternativa
muito usada. A forma geral no espaço de estado para um modelo autônomo contínuo no
tempo é:
x& = f ( x ),
(A.10)
onde “x ∈ IRn” é o vetor de estado n-dimensional e “ x& = dx dt ”.
A forma geral para um modelo não autônomo é:
x& = f ( x , u ( t )),
(A.11)
onde “u(t) ∈ IRr” é o vetor de entradas formado por “r” funções temporais.
Uma representação bem conhecida é a de espaço de estado, que é obtida
considerando o sistema linear, acrescentando-lhe uma equação estática que descreva o
sistema de medição dada por:
x& = Ax + Bu
y = Cx + Du,
(A.12)
onde:
y ∈ IRp – é o vetor “p-dimensional” de saídas medidas;
A, B, C e D – matrizes constantes.
No caso discreto a equação (A.12) torna-se:
x (k + 1) = Φx (k ) + Γu ( k )
y( k ) = C d x ( k ) + D d u ( k )
(A.13)
158
sendo, “Φ”, “Γ”, “Cd” e “Dd” matrizes.
Modelos paramétricos são representações matemáticas especialmente adequadas à
identificação de sistemas em tempo discreto, usando-se algoritmos conhecidos para a
estimação de parâmetros. Um modelo geral é representado pela seguinte expressão:
z − d .B( z −1 )
C ( z −1 )
y( t ) =
u (t ) +
υ( t )
A (z −1 )
D( z −1 ).A ( z −1 )
14243
144244
3
MODELO DA
PLANTA
(A.14)
MODELO DO
RUÍDO
onde:
y(t) e u(t) – sinais de saída e de entrada, respectivamente, nos instantes de amostragem
“t = n.Ts”, onde “n ∈ ZZ +” e “Ts” é o período de amostragem;
d – atraso de transporte, que é um múltiplo inteiro do período de amostragem;
υ(t) – sinal de ruído estacionário com distribuição normal e de média nula.
Os polinômios “A”, “B”, “C”, “D” em “z-1”, de ordens “na”, “nb”, “nc” e “nd”
respectivamente, são:
A(z −1 ) = 1 + a1.z −1 + a 2 .z −2 + K + a na .z − na
B(z −1 ) = b1.z −1 + b 2 .z −2 + K + b nb .z −nb
C(z −1 ) = 1 + c1.z −1 + c 2 .z −2 + K + c nc .z −nc
(A.15)
D(z −1 ) = 1 + d1.z −1 + d 2 .z −2 + K + d nd .z −nd
A partir da equação (A.15), chega-se a alguns modelos lineares discretos
mostrados na tabela A.1, onde “n” representa a ordem do sistema.
Considere as seguintes notações:
Modelo AR – modelo auto-regressivo, do inglês autoregressive;
Modelo MA – modelo com média móvel, do inglês moving average;
Modelo ARMA – modelo auto-regressivo com média móvel, do inglês
autoregressive moving average;
Modelo ARX – modelo auto-regressivo com entradas exógenas, do inglês
autoregressive with exogenous inputs, ou modelo CAR – controlador auto-regressivo, do
inglês, controlled autoregressive;
159
Modelo ARMAX – modelo auto-regressivo com média móvel e entradas
exógenas, do inglês autoregressive moving average with exogenous inputs, ou modelo
CARMA – controlador auto-regressivo com média móvel, do inglês controlled
autoregressive moving average;
Modelo ARIX – modelo auto-regressivo integrado de entradas exógenas, do
inglês autoregressive with exogenous inputs integrated;
Modelo ARIMAX – modelo auto-regressivo integrado de média móvel e entradas
exógenas, do inglês autoregressive moving average with exogenous inputs integrated; ou
modelo CARIMA – controlador auto-regressivo integrado com média móvel, do inglês
controlled autoregressive integrated moving average.
Tabela A.1 – Modelos lineares paramétricos obtidos a partir da equação (A.14).
Modelo
na nb nc nd
D
AR
n
0
0
0
1
y( t ) =
MA
0
0
>0
0
1
y( t ) = C(z −1 )υ( t )
ARMA
n
0
>0
0
1
y( t ) =
n
≤n
0
0
1
y( t ) =
1
z −d .B(z −1 )
C(z −1 )
y( t ) =
u( t ) +
υ( t )
A(z −1 )
A(z −1 )
ARX
ou CAR
ARMAX
ou CARMA
ARIX
ARIMAX
ou CARIMA
n
≤n >0
n
≤n
n
≤n >0
0
0
1
1
Expressões
1–z
-1
1–z
-1
1
υ( t )
A (z −1 )
C(z −1 )
υ(t )
A(z −1 )
z −d .B(z −1 )
1
u( t ) +
υ( t )
−1
A( z )
A(z −1 )
z − d .B(z −1 )
1
y( t ) =
u (t ) +
υ( t )
−1
−1
A(z )
(1 − z ).A(z −1 )
y( t ) =
z − d .B(z −1 )
C(z −1 )
u
(
t
)
+
υ( t )
A(z −1 )
(1 − z −1 ).A(z −1 )
Obs.: De acordo com a equação (A.14) os polinômios “A(z-1)”, “B(z-1)”, “C(z-1)”
e “D(z-1)” com ordem zero, respectivamente, são iguais a 1, 0, 1 e 1.
160
A.4 IDENTIFICAÇÃO DE SISTEMAS
Identificação de sistemas é um procedimento alternativo ao da modelagem caixa
branca, onde um modelo matemático é obtido através dos sinais disponíveis de entrada e
de saída de um sistema real qualquer. Esse modelo deve representar os principais aspectos
do sistema, ou seja, ao excitar o modelo obtido por uma entrada, esse deve fornecer como
resultado, uma saída do sistema tão próxima quanto possível das saídas medidas.
A identificação de sistemas é um claro exercício que envolve múltiplos e
conflitantes objetivos, tipicamente complexidade do modelo, critérios de desempenho e
validação, que influenciam a seleção das estruturas do modelo matemático. A noção de um
“bom modelo” é subjetiva, fazendo com que a tentativa e erro seja uma regra relevante de
engenharia em identificação de sistemas, conforme Isermann e Ljung citado por COELHO
e COELHO (2004).
Alguns dos diferentes propósitos para utilização de modelos matemáticos em
automação industrial, conforme COELHO e COELHO (2004) são:
Previsão: tentativa de prever os estados futuros do sistema (comportamento
dinâmico) e está limitada à precisão do modelo e aos efeitos das perturbações atuantes
(presentes) no sistema;
Análise e projeto de sistemas de controle: é utilizado na sintonia de
controladores clássicos, na síntese de algoritmos de controle adaptativos e preditivos, e na
estimação do estado de variáveis não-mensuráveis;
Supervisão: utiliza a simulação, com base no modelo matemático, para avaliação
das características operacionais do sistema, para projeto de engenharia ou para treinamento
de operadores. Muitas vezes é também utilizado na detecção de erros e diagnósticos;
Otimização: A otimização de sistemas necessita de modelos matemáticos
precisos para auxiliar na tomada de decisões, nos mais variados campos, objetivando
maximizar produção, minimizar custos, etc.
As principais etapas para realização de identificação de sistemas são: testes
dinâmicos e coleta de dados, escolha da representação matemática a ser usada,
determinação da estrutura do modelo, estimação de parâmetros e validação do modelo.
Algumas informações importantes sobre identificação de sistemas, conforme
COELHO e COELHO (2004) são:
161
O tipo do modelo do sistema: linear/não linear, variante/invariante no tempo,
paramétrico/não-paramétrico, contínuo/discreto, monovariável/multivariável, característica
do ruído e atraso de transporte;
Precisão requerida do modelo: baixa, média ou alta;
O método de estimação do sistema: off-line/on-line, em malha aberta/malha
fechada, em resposta ao degrau, em resposta em freqüência, análise espectral e de Fourier,
técnicas de correlação, métodos de estimação de parâmetros, etc.
A.4.1 Procedimentos de identificação
Existem diversas técnicas de identificação para obtenção do modelo matemático
do sistema através da geração do sinal de entrada, medição da saída e armazenamento dos
dados, entre as quais:
Identificação de um sistema pelo teste de resposta ao degrau: submete-se o
sistema a uma entrada degrau para gerar saídas que são medidas e armazenadas por um
registrador. A modelagem do sistema é obtida ao aplicar diferentes técnicas gráficas,
numéricas ou computacionais nas curvas de reação do sistema. Por o sinal degrau ter uma
pobre composição em freqüência, esse teste só tem validade para sistemas lineares ou nãolineares que sejam lineares na vizinhança do ponto de operação.
Identificação pelo teste da resposta em freqüência: submetendo o sistema a
uma entrada harmônica é possível identificar as freqüências de corte nas curvas de
magnitude e fase (após avaliar a influência dos zeros e pólos), obtendo a correspondente
função de transferência estimada.
Identificação off-line: essa nomenclatura é dada porque a realização do ensaio é
feita em um instante, e em uma segunda etapa faz-se a avaliação dos dados, de acordo com
a figura A.4(a). Para tal procedimento é necessário que a estrutura do modelo seja
disponível (ordem do modelo, o número de pólos e zeros e, em alguns casos, o valor do
atraso de transporte ou tempo morto) e só então se excita o sistema com sinais de teste de
entrada (ruído branco, seqüência binária pseudo-aleatória) gerando sinais de saída. Esses
valores de entrada e saída são armazenados para que sejam posteriormente estimados os
parâmetros do modelo, sem restrição de tempo, utilizando algoritmos não-recursivos. Sua
desvantagem está na necessidade armazenar os valores digitalizados obtidos no ensaio, de
162
todas as amostras de entrada e saída, utilizando, portanto, uma grande quantidade de
memória.
Identificação on-line: essa é uma técnica iterativa, via computador, que em
muitas vezes se utiliza de métodos recursivos que necessitam de pouca memória para
serem capazes de atualizar a estimação dos parâmetros do modelo a cada período de
amostragem, de acordo com a figura A.4(b). Com essa técnica nenhuma medida da
experimentação precisa ser armazenada e processada. O algoritmo mais popular dessa
técnica é o dos Mínimos Quadrados Recursivos - MQR. Entre diversos propósitos a que
essa técnica se destina, pode-se citar rastreamento de parâmetros variantes no tempo,
detecção, diagnóstico, filtragem, controle adaptativo/preditivo e redes neurais.
entrada
Sistema
saída
entrada
Sistema
saída
disco
computador
computador
Modelo
Modelo
(a) Identificação do sistema off-line.
(b) Identificação do sistema on-line.
Figura A.4 – Esquemas de identificação off-line e on-line.
A utilização de identificação de sistemas em engenharia de controle de processo
tem sido enfatizada na implementação de controladores adaptativos/preditivos. A etapa de
identificação consiste na obtenção dos parâmetros do modelo do sistema controlado,
através de um estimador de parâmetros recursivos (COELHO e COELHO, 2004).
A.5 ESTIMADOR DOS MÍNIMOS QUADRADOS RECURSIVO (MQR)
A estimação de parâmetros é um procedimento numérico que determina os
valores dos parâmetros desconhecidos do modelo, e pode ser formulado como um
163
problema de otimização onde o melhor modelo é aquele que melhor se ajusta de acordo
com um dado critério (COELHO e COELHO, 2004).
Os parâmetros estimados são, em geral, variantes no tempo e o modelo estimado é
uma simplificação (abstração) do sistema real. Isto permite a atualização dos parâmetros
em um modelo linear, que pode representar um modelo não-linear (ROMÃO, 1996).
Como este trabalho esta voltado para controladores adaptativos, faz-se necessária
a identificação em tempo real, através de um algoritmo recursivo, aqui adotado o algoritmo
de Mínimos Quadrados Recursivos (MQR), por ser este o mais popular deles.
O Princípio dos Mínimos Quadrados (MQ) foi formulado por Karl Friedrich
Gauss no final do século XVIII para prever a trajetória de planetas e cometas a partir das
observações realizadas. Esse princípio consiste em buscar os parâmetros desconhecidos
que, ao ser multiplicado por um número que mede o grau de precisão, minimizem a soma
dos quadrados das diferenças entre os valores observados e os calculados.
Além dos MQR existem outros métodos de identificação que são variantes do
algoritmo dos MQ, assim como os seguintes algoritmos: dos mínimos quadrados
estendidos (MQE), dos mínimos quadrados generalizados (MQG), dos mínimos quadrados
totais (MQT) e das variáveis instrumentais (MVI).
Considerando o modelo ARX (tabela A.1) caracterizado por uma entrada, “u(t)”,
uma saída, “y(t)”, uma perturbação, “e(t)”, e cuja representação por equação a diferenças é:
y( t ) = − a1y( t − 1) − a 2 y( t − 2) − K − a na y( t − na ) + K
K + b1u ( t − d − 1) + K + b nb u ( t − d − nb) + e( t )
(A.16)
A equação (A.16) também pode ser escrita na forma vetorial, denominada modelo
de regressão linear:
y(t ) = ϕT (t )θ(t ) + e(t )
(A.17)
sendo:
ϕT (t ) = [ − y(t − 1) − y(t − 2) K − y( t − na) u(t − d − 1) K u(t − d − nb) ] (A.18)
θT = [ a1 a 2 K a na b1 b 2 K b nb ]
(A.19)
164
onde:
u(t), y(t) – valores de entrada e saída do sistema, respectivamente, no instante t;
e(t) – representa: erro de modelagem, erro de medição ou ruído na saída do tipo
estocástico, determinístico ou offset;
ϕ(t) – vetor de medidas;
θ(t) – vetor de parâmetros do modelo.
Admitindo que sejam necessárias “N” medidas para determinar os parâmetros “ai”
(i=1,..,.na) e “bj” (j=1,...,nb), então o vetor de saída pode ser determinado da seguinte
forma:
y ( 0) ϕ T ( 0)
e (0 )
y(1) T
= ϕ (1) θ + e(1)
M
M
M
T
y( N − 1) ϕ ( N − 1)
e( N − 1)
(A.20)
A equação (A.20) pode ser representada em forma matricial,
Y = φθ + ξ
(A.21)
onde:
Y – Vetor de saída;
φ – Matriz de observação;
θ – Vetor de parâmetros do modelo;
ξ – Vetor de erro e(t).
O primeiro termo do segundo membro da equação (A.17) pode ser interpretado
como a predição de um passo “ ŷ( t / t − 1) ” da saída “y(t)” com os dados disponíveis no
instante “t-1”, já que o erro é a diferença entre a saída real e sua predição:
e( t ) = y( t ) − ŷ( t / t − 1)
(A.22)
165
O método dos mínimos quadrados é obtido ao minimizar o quadrado do erro:
J=
∑e
2
t
t
=
∑ (y
t
− ϕ Tt θ )
2
(A.23)
t
A equação (A.23) pode ser reescrita na forma matricial, como:
J = ξTtξt ⇒
J = (Yt − φ tθ) T (Yt − φ tθ) ⇒
T
t
T
t
T T
t
(A.24)
T T
t
J = Y Yt − Y φ tθ − θ φ Yt + θ φ φ tθ
Calculando a derivada da equação (A.24) com relação à “θ” e igualando-a a zero,
tem-se:
∂J
= −2YtTφt + 2θTφTtφt = 0
∂θ
(A.25)
Portanto, o estimador dos mínimos quadrados não recursivo “ θ̂MQ ” é obtido ao
resolver a equação (A.25), chegando-se à seguinte expressão:
θˆ MQ = (φ Tt φ t ) −1 φTt Yt
(A.26)
Até este ponto, para estimar os parâmetros de um sistema considera-se que todos
os dados já estejam disponíveis.
Em controle adaptativo, é necessária a estimação de parâmetros em tempo real e
para isto utilizam-se algoritmos de identificação recursivos, onde o mais comum deles é o
algoritmo dos Mínimos Quadrados Recursivos que está apresentado na figura A.5.
A cada instante de amostragem novas informações de entrada e saída são
incorporadas ao sistema. O modelo “ θ̂(t - 1) ”, determinado com base nas informações
obtidas até o instante “t-1”, é usado para obter uma estimativa “ ŷ(t) ” da saída atual do
sistema. Este valor é comparado com a saída real “y(t)” do sistema, gerando um erro de
166
modelagem “ε(t)”. O erro “ε(t)” é utilizado no algoritmo de atualização para corrigir o
modelo (VAZ, 1999).
θˆ ( t ) = θˆ ( t − 1) + K ( t ) ⋅ ε( t )
(A.27)
Sistema
u(t)
θ
saída real
Modelo
estimado
θˆ ( t − 1)
correção das
estimativas
y(t)
+
–
ŷ(t ) = ϕT (t ).θˆ ( t − 1)
saída estimada
ε(t)
erro de
modelagem
Algoritmo de
atualização
Figura A.5 – Esquema iterativo para estimação de parâmetros em tempo real.
Segundo AGUIRRE (2007) o estimador MQR é composto pelas seguintes
equações:
P( t − 1).ϕ( t )
1 + ϕT ( t ).P( t − 1).ϕ( t )
(A.28)
P(t ) = [I − K(t ).ϕT (t )].P(t − 1)
(A.29)
θˆ ( t ) = θˆ ( t − 1) + K ( t ).[ y( t ) − ϕT ( t )θˆ ( t − 1)]
(A.30)
K (t ) =
onde:
K(.) – ganho do estimador;
P(.) – matriz de covariância;
ϕ(.) – vetor de medidas;
I – matriz identidade;
θ̂(.) – vetor de parâmetros estimados;
y(.) – saída real;
167
Observações:
•
A variável “ε(t)” no algoritmo dos MQR é o erro entre a saída do sistema e a saída
estimada, esta última é obtida das estimativas do vetor de parâmetros “ θ̂(t − 1) ” a
partir dos instantes anteriores ao instante de tempo “t–1”, equação (A.31). Essa
variável é também denominada de erro de previsão da saída ou série de inovações
(COELHO E COELHO, 2004);
ε( t ) = y( t ) − ŷ( t ) = y( t ) − ϕT ( t )θˆ ( t − 1)
•
(A.31)
O erro de previsão torna-se zero quando “ θˆ ( t ) → θ( t ) ”. A medida da qualidade do
estimador reflete na matriz definida positiva, “P(t)”, denominada matriz de
covariância do estimador “ θ̂ ”. Se as estimativas iniciais são pobres, então “P(t)” é
construída como uma matriz diagonal com elementos positivos e de magnitude
elevada. Se as estimativas melhorarem, os elementos de “P(t)” decrescem em
magnitude, de modo que o ganho, “K(t)”, torna-se aproximadamente nulo,
resultando “ θˆ ( t + 1) ≈ θˆ ( t ) ”. Portanto, a precisão das estimativas está associada ao
tamanho dos elementos da matriz de covariância “P(t)”. (COELHO E COELHO,
2004);
•
No início do algoritmo dos MQR, atribuem-se valores para a matriz de
covariância “P(t)” e para o vetor de parâmetros estimados “ θ̂( t ) ”. Se os valores
dos parâmetros são conhecidos previamente, então estes valores devem ser
utilizados para “ θ̂(0) ”, com “P(0)=m.I” onde “ m ≈ 10 ”. Caso não se disponibilize
conhecimento algum sobre o sistema, “ θ̂(0) ” pode assumir inicialmente valores
pequenos e “m” pode assumir um valor grande (“ m ≈ 103 ” ou maior). As
estimativas iniciais de cada um dos parâmetros do modelo podem ser ajustadas
diferentemente, ponderando cada um dos elementos da diagonal da matriz “P(0)”;
•
Em controle adaptativo o comportamento dinâmico do sistema em malha fechada
fica comprometido durante a fase inicial de processamento. Nesse início os
parâmetros do sistema ainda estão sendo sintonizados tornando o sinal de controle
inadequado, produzindo, por conseqüência, uma mudança na variável do sistema.
168
O algoritmo do estimador dos MQR pode ser descrito de acordo com as seguintes
etapas:
1. Escolhe-se valores iniciais para a matriz de covariância, “P(t)” e para o vetor de
parâmetros estimados, “ θ̂(t) ”;
2. Obtêm-se os novos valores de saída e entrada do sistema, “y(t+1)” e “u(t+1)”,
respectivamente;
3. Atualiza-se o vetor de medidas:
ϕT (t + 1) = [ − y( t) − y(t − 1) K u( t − d) u( t − d − 1) K ] ;
4. Calcula-se o erro de estimação, erro residual ou de modelagem “ ε( t + 1) ”
utilizando a equação (A.31);
5. Calcula-se o ganho do estimador “ K( t + 1) ” através da equação (A.28);
6. Calcula-se o novo vetor de parâmetros estimados “ θˆ ( t + 1) ” utilizando a
equação (A.30);
7. Atualiza-se a matriz de covariância “ P( t + 1) ” através da equação (A.29);
8. Incrementa-se o tempo em um passo “t = t + 1” e retornar à etapa 2.
A.5.1 Estimação de sistemas variantes no tempo
O algoritmo MQR foi desenvolvido supondo que os parâmetros do sistema são
invariantes com o tempo. Entretanto, se os parâmetros do sistema variam lentamente,
provocados por desvios ou porque o sistema não é linear, o identificador deve ser capaz de
rastrear essas mudanças, visando à aplicação em controles adaptativos. A magnitude dos
elementos da matriz “P(t)” tem papel importante no comportamento do sistema, pois a
convergência dos parâmetros está associada à redução desses elementos, donde se obtém a
capacidade de adaptação do estimador evitando que esses elementos se tornem muito
pequenos, de forma a não comprometer a correção dos estimadores “ θ̂( t ) ”.
Na prática, procura-se um compromisso entre a capacidade de adaptação {“P(t)”
grande} e a convergência no algoritmo de estimação {“P(t)” pequeno} (COELHO e
COELHO, 2004).
Para que o estimador mantenha a capacidade de adaptação, utilizam-se os
procedimentos listados a seguir, que visam controlar a magnitude dos elementos da matriz
de covariância “P(t)”, limitando-os a valores mínimos.
169
•
Atualização de “P(t)”;
•
Utilização do fator de esquecimento.
A.5.2 Atualização da matriz de covariância
A atualização da matriz de covariância é realizada adicionando uma matriz
diagonal semidefinida positiva “Q(t)” aos elementos de “P(t)”, objetivando aumentá-los.
Portanto, a nova matriz de covariância e determinada por:
P ( t + 1) = P ( t ) + Q( t )
(A.32)
Existem dois procedimentos baseados na equação (A.32) onde um é denominado
de random walk (busca aleatória) e covariance resetting (reinicialização da matriz de
covariância “P(t)”).
A técnica random walk, consiste em adicionar, a cada iteração, a matriz “Q(t)”.
Essa matriz apresenta uma estrutura diagonal, de acordo com a equação (A.33), e os seus
elementos descrevem uma suposta razão de variação dos parâmetros do sistema.
Q ( t ) = q.I ( na + nb +1) x ( na + nb +1) , onde q ∈ R +
(A.33)
Para aplicação dessa técnica, é necessário conhecer antecipadamente quais os
parâmetros variantes, bem como o instante de tempo em que acontece a mudança
paramétrica (COELHO e COELHO, 2004). De posse dessas informações, atribui-se zero
nas posições da diagonal “Q(t)”, que correspondem aos parâmetros invariantes, e valores
positivos diversos nas posições da diagonal que correspondem aos parâmetros variantes. A
magnitude desses valores reflete na magnitude da mudança dos parâmetros. Por exemplo,
para o parâmetro que muda “pouco” pode-se utilizar o valor “0,05” e para o parâmetro que
muda em “100%” deve-se tentar o valor de “0,5” {Q(t) = diag (0,5 0 0,05 0)}.
É importante salientar que “Q(t)”, aumenta o comprimento do passo de ajuste e
um valor “grande” causa uma excessiva oscilação nos correspondentes parâmetros
estimados. (COELHO e COELHO, 2004).
A segunda técnica, covariance resetting, consiste em adicionar a matriz “Q(t)”
somente em instantes de tempo específicos. A matriz “Q(t)” não pode ser adicionada à
170
matriz “P(t)” com muita freqüência, para que os elementos de “P(t)” não se tornem grandes
a ponto de causar flutuações nas estimativas, e nem pode ser adicionada com pouca
freqüência, de forma a tornar pequenos os elementos de “P(t)” a ponto do algoritmo deixar
de rastrear as mudanças do sistema. O instante ótimo de reinicialização da matriz “P(t)”
através da adição da matriz “Q(t)” é caracterizado pelo momento em que a magnitude dos
elementos da matriz de covariância “P(t)” atinge um valor menor do que um valor limite,
ou ainda se o valor absoluto do erro de estimação exceder outro valor limite, ambos
especificados pelo usuário.
A.5.3 Fator de esquecimento
Essa técnica faz com que o algoritmo dos MQR tenha uma capacidade de
adaptação mínima, impedindo que o ganho do estimador tenda a zero, por conseqüência,
evitando que os elementos da matriz de covariância tendam a zero, mantendo em “alerta” o
estimador para rastrear dinâmicas variantes. Esta capacidade é útil em sistemas variantes
no tempo e é conseguida introduzindo uma constante no algoritmo (denominada fator de
esquecimento – “λ”) que pondera mais as últimas medidas dando-lhes mais importância do
que as medidas antigas. Isto significa que erros recentes devem ser mais fortemente
enfatizados do que erros anteriores de modo a permitir ao estimador dos MQR adaptar-se
ao novo sistema. Na prática essa modificação consiste em substituir “P(t)” por “P(t)/λ”.
De acordo com RÚBIO e SÁNCHEZ (1996), para “λ=1” tem-se o MQR normal,
enquanto que para “λ<1” o algoritmo desconsidera as medidas mais antigas. Por exemplo,
se “λ=0,99” conduz à estimativa de parâmetros baseando-se nas últimas 100 amostras,
sendo uma faixa normal de utilização do fator de esquecimento entre 0,98 e 1, podendo em
alguns casos especiais diminuir até 0,95. Dependendo da escolha do valor de “λ”, este
propicia uma boa eliminação do ruído ou uma melhora para seguir a variação dos
parâmetros.
A equação (A.23) é a função custo através da qual, ao ser minimizada, obtém-se o
MQR. Para incorporar o fator de esquecimento essa equação passa a ser:
171
N
J( N, θ) = ∑ λN−t .e 2 ( t ) ou
t =1
(A.34)
2
J( N, θ) = λ.J( N − 1, θ) + e ( N)
Portanto, o estimador dos mínimos quadrados com fator de esquecimento
apresenta a seguinte forma recursiva, substituindo as equações (A.28), (A.29) e (A.30).
K (t ) =
P( t − 1).ϕ( t )
λ + ϕT ( t ).P( t − 1).ϕ( t )
(A.35)
1
P(t) = [I − K(t).ϕT (t )].P(t − 1)
λ
(A.36)
θˆ ( t ) = θˆ ( t − 1) + K ( t ).[ y( t ) − ϕT ( t ).θˆ ( t − 1)]
(A.37)
Além do fator de esquecimento de valor fixo, pode-se também utilizar um fator de
esquecimento variável objetivando aumentar a sensibilidade do estimador dos MQR na
presença de variações nos parâmetros do sistema. A partir de critérios definidos pelo
operador, o fator de esquecimento pode assumir valores pequenos, “0,9 ≤ λ ≤ 1”, para que
a sensibilidade do estimador aumente e permita o rastreamento dos parâmetros, ou assumir
valores próximos de 1 ao ser verificado que os parâmetros estimados estão próximos dos
valores verdadeiros. Esses critérios podem ser definidos, por exemplo, a partir dos valores
do erro de previsão ou dos valores do traço da matriz de covariância “P(t)”.
Outra metodologia utilizada é o fator de esquecimento com crescimento
exponencial. Neste método, procura-se manter “λ(t)” em 1 ou na vizinhança, “λ(t) =
0,999”. Quando uma mudança paramétrica é detectada, “λ(t)” pode ser ajustado para 0,95,
o que implica em uma rápida variação no valor dos parâmetros, seguido de um ajuste
exponencial crescente de 1 para 0,999 (COELHO e COELHO, 2004).
A seguir, mostra-se o fator de esquecimento com ajuste exponencial:
λ(t ) = λ0 .λ(t − 1) + λ.[1 − λ0 ]
onde:
λ(t) – fator de esquecimento exponencial;
(A.38)
172
λ0 – fator de esquecimento inicial (λ0 < 1);
λ – fator de esquecimento final (λ ≅ 1).
A.5.4 Validação do modelo
Após a parametrização do sistema, o modelo estimado deve ser qualificado
utilizando técnicas de validação de modelos. Entre as diversas técnicas de validação podese investigar a magnitude de certos índices de desempenho (COELHO e COELHO, 2004).
O Somatório do Erro Quadrático (SEQ) e o Coeficiente de Correlação Múltipla
(R2) são índices de desempenho que servem para a avaliação da qualidade do modelo e são
representados pelas equações (A.39) e (A.40) respectivamente.
N
SEQ = ∑[y( t ) − ŷ( t )]
2
(A.39)
t =1
N
R 2 = 1−
∑[y(t ) − ŷ( t )]
t =1
N
2
∑[y(t ) − y)]
(A.40)
2
t =1
onde:
y(t) – saída real;
ŷ ( t ) – saída estimada;
y – média das N amostras da experimentação.
Quando o valor de R2 é igual a 1, indica uma exata adequação do modelo para os
dados medidos do sistema. O valor de R2 entre 0,9 e 1 pode ser considerado suficiente para
muitas aplicações práticas em identificação (COELHO e COELHO, 2004).
A.6 CONTROLE ADAPTATIVO
O termo adaptativo significa mudar um comportamento para se adequar as novas
circunstâncias. Portanto, um controlador adaptativo é um controlador que pode modificar
seu comportamento em resposta às mudanças na dinâmica do sistema e às perturbações.
173
Essas mudanças e perturbações podem ser geradas pela não linearidade dos sistemas e dos
atuadores, pelo desgaste de componentes mecânicos, como também por alterações no
ambiente onde o sistema está inserido.
Um sistema de controlador adaptativo, de acordo com a figura A.6, é composto
por duas malhas, das quais uma é a realimentação normal, contendo o sistema e o
controlador, e a outra que é responsável pela estimação dos parâmetros do processo e pelo
projeto do controlador para cada fase de estimação do processo.
Controle adaptativo é particularmente interessante para sistemas cujos parâmetros
da planta são desconhecidos ou variam com o tempo. De maneira prática, assume-se que a
estrutura da planta é conhecida, mas os valores dos parâmetros não o são. O enfoque
usualmente adotado é combinar técnicas de estimação de parâmetros com técnicas de
projeto de sistemas de controle. Assim, pode-se imaginar diversas estratégias de controle
adaptativo combinando-se cada uma das possíveis técnicas de estimação de parâmetros
com cada uma das técnicas de projeto de controladores (AGUIRRE, 2007b).
Malha de estimação de parâmetros (lenta)
Atuação
desejada
Projeto do
Controlador
Parâmetros
do sistema
Estimação do
sistema
Parâmetros
do controlador
Referência +
erro
–
Controlador
Ajustável
Sinal de
controle
(entrada)
Sistema
Saída
Malha de realimentação (rápida)
Figura A.6 – Diagrama de blocos de um sistema adaptativo.
De acordo com a figura A.6, a cada instante de amostragem e a partir das
informações de entrada e saída do sistema, os parâmetros do modelo são estimados
recursivamente alterando os parâmetros do controlador.
174
A.7 TIPOS DE CONTROLADORES ADAPTATIVOS
A razão inicial para a introdução do controle adaptativo era a de que os sistemas
de controle podiam adaptar-se às mudanças da dinâmica do sistema e às características dos
distúrbios, mas verificou-se que esta técnica podia ser usada para fornecer ajustes
automáticos de controladores.
Os três tipos de sistemas de controle adaptativos mais utilizados são: Controlador
de ganho tabelado, Controlador adaptativo de modelo de referência e Controlador autoajustável. Um resumo sobre esses controladores será realizado a seguir dando ênfase ao
controlador auto-ajustável, mais especificamente ao Controlador de Variância Mínima
Generalizada.
A.7.1 Controlador de ganho tabelado
Ganho tabelado foi utilizado pela primeira vez no início da década de 50 para
controle de vôo em aeronaves. O ganho tabelado, também conhecido como gain
scheduling, é considerado um controlador adaptativo de malha aberta, que consiste em
modificar os parâmetros do controlador a partir de uma tabela que já tenha sido calculada
previamente, para distintos pontos de funcionamento em função de uma variável auxiliar.
Esse tipo de controlador é representado pela figura A.7 (RUBIO e SÁNCHEZ, 1996).
Mecanismo
de Adaptação
Sinal de
referência +
erro
–
Controlador
Ajustável
Medida da
variável auxiliar
Sinal de
controle
(entrada)
Sistema
Ambiente
Saída
Figura A.7 – Diagrama de bloco de um sistema com ganho tabelado.
Esse tipo de adaptação tem a vantagem de alterar os parâmetros do controlador
muito rapidamente, dependendo da rapidez na mudança da dinâmica do sistema; sendo
muito importante a escolha da variável auxiliar. As desvantagens são a negligência de
175
todos os efeitos baseados nos sinais não medidos ou nos distúrbios, mudanças
imprevisíveis do comportamento do sistema e na quantidade de tempo necessário para a
realização da tabela de parâmetros (por ser necessário armazenar várias condições de
operação).
A.7.2 Controladores adaptativos por modelo de referência (MRAC)
Os sistemas adaptativos por modelo de referência foram originalmente propostos
para resolver um problema no qual as especificações de desempenho são dadas em termos
de um modelo de referência. Este modelo diz qual é a forma mais adequada que a saída do
sistema deverá responder ao sinal de comando. Um diagrama de blocos do sistema é
mostrado na figura A.8. O controlador é constituído por duas malhas, sendo a malha
interna uma malha de realimentação padrão, composta pelo sistema e pelo controlador, e a
malha externa responsável pelo ajuste dos parâmetros do controlador de tal forma que o
erro, que é a diferença entre a saída do sistema e a saída do modelo, seja nulo ou mínimo,
caso existam perturbações (ÅSTRÖM e WITTENMARK, 1995). A técnica do modelo de
referencia pode ser usada para outros propósitos (identificação) e com outros tipos de
modelos (série, série paralelo), o mais comum é utilizar um modelo paralelo como mostra a
figura A.8.
Modelo de
Referência
Parâmetros
do controlador
Sinal de
referência
+
–
Controlador
Ajustável
Saída do modelo
Mecanismo
de Adaptação
Sinal de
controle
(entrada)
Erro
Sistema
Figura A.8 – Estrutura com modelo de referência (MRAC).
–
+
Saída do
sistema
176
No MRAC se faz necessário determinar o mecanismo de ajustagem para que o
erro do sistema tenda para zero, ou seja, para que o sistema seja estável. Isto é obtido
através da regra do M.I.T., onde:
dθ
∂ε
= −ψ.ε.
dt
∂θ
(A.41)
onde:
ε – erro de modelagem (diferença entre a saída do sistema e a saída do modelo);
θ – parâmetros a serem ajustado;
ψ – ganho de adaptação;
∂ε/∂θ – derivada da sensibilidade do erro com relação ao parâmetro θ.
Na prática, é necessário efetuar aproximações para obter a derivada da
sensibilidade. A regra do M.I.T. pode ser considerada como um esquema de gradiente para
minimizar o quadrado do erro “ε2” (ÅSTRÖM e WITTENMARK, 1995).
As vantagens do MRAC estão na sua rápida adaptação para uma entrada definida
e na simplicidade de tratamento da estabilidade utilizando a teoria de estabilidade de
sistema não linear. (RUBIO SÁNCHEZ, 1996).
A.7.3 Controlador auto-ajustável (STR)
Um controlador auto-ajustável é utilizado nas situações em que os parâmetros do
sistema variam com o tempo, seja por desgastes de componentes físicos ou nos casos em
que o sistema não é linear e o ponto de funcionamento de trabalho seja modificado. Esse
tipo de problema é resolvido ao utilizar controladores adaptativos, porque além de
possuírem a malha principal de controle (que existe em todo sistema de controle),
incorporam uma segunda malha que modifica seus parâmetros a partir da informação
recolhida do sistema e de um determinado critério de desempenho.
Nesses controladores, inicia-se o projeto para o sistema com os parâmetros
conhecidos, posteriormente tais parâmetros são substituídos pelos parâmetros estimados,
sendo, o controlador, recalculado em cada passo. A aplicação desta idéia é o que se
177
conhece como o princípio de equivalência à certeza, o qual supõe que os parâmetros
identificados coincidem com os reais.
O diagrama de blocos desse controlador é mostrado na figura A.9 onde se verifica
três partes distintas (RÚBIO e SÁNCHEZ, 1996):
• um algoritmo recursivo de estimação de parâmetros;
• um mecanismo de adaptação que faça a tarefa de projetar o controlador e;
• um controlador com parâmetros ajustáveis.
Atuação
desejada
Parâmetros
do sistema
Projeto do
Controlador
Estimação do
Sistema
Parâmetros
do controlador
Referência +
erro
–
Controlador
Ajustável
Sinal de
controle
(entrada)
Sistema
Saída
Figura A. 9 – Diagrama de blocos de um controlador auto-ajustável.
O STR tem a vantagem de se adaptar, em particular, para perturbações não
mensuráveis, tendo ao mesmo tempo uma estrutura modular (controle e identificação
separados), o que possibilita a programação por blocos, sendo possível de realizar distintos
controladores por combinação de diferentes métodos de projeto e identificadores.
Com relação ao critério de projeto, pode-se dividir em dois tipos: estocástica ou
não estocástica, de acordo com a abordagem do problema. Quando a abordagem é
estocástica, consideram-se sistemas cujos sinais não se conhecem exatamente e nem
podem ser predeterminados (RÚBIO e SÁNCHEZ, 1996).
O projeto com abordagem estocástica, normalmente minimiza as variações com
relação à zero através de uma função custo.
Na abordagem não estocástica, considera-se que as perturbações que incidem
sobre um sistema são conhecidas, podendo-se descrever estes sistemas analiticamente por
intermédio de um sistema dinâmico determinista (RÚBIO e SÁNCHEZ, 1996).
178
Nesse caso, o índice de atuação se dá em função de especificações que o sistema
deve cumprir o que normalmente se traduz em especificar uma função de transferência
desejada em malha fechada. Atualmente, já foi demonstrado em inúmeros casos que ambas
as abordagens conduzem a resultados similares (RÚBIO e SÁNCHEZ, 1996).
Os controladores STR são obtidos combinando-se uma técnica de estimação de
parâmetros com uma técnica de controle. As técnicas de controle mais utilizadas são
Variância Mínima (MV), Variância Mínima Generalizada (GMV), Controle Preditivo
Generalizado (GPC), Alocação de Pólos (GPP) e Controle Linear Quadrático Gaussiano
(LQG). Para possibilitar a implementação do controlador em tempo real, utilizam-se
técnicas de estimação de parâmetros recursivas, principalmente Mínimos Quadrados
Recursivos (MQR). O enfoque STR baseia-se na variação dos parâmetros de forma a
otimizar algum índice de desempenho (AGUIRRE, 2007b). Neste trabalho optou-se pela
seguinte combinação: estimação de parâmetros realizada pelo MQR, já discutido
anteriormente, e pela técnica de controle GMV segundo ISERMANN et al (1992), descrita
a seguir.
A.7.4 Controlador de variância mínima generalizada (GMV)
O controlador GMV foi desenvolvido com base nas estratégias do controlador de
Variância Mínima (MV), e sendo GMV considerado uma generalização do controlador
MV.
O objetivo da estratégia do controlador MV é prever as saídas futuras do sistema
original a ser controlado, através de um modelo matemático, e utilizar essas informações
no cálculo da ação atual de controle. Esse cálculo é feito de forma a minimizar uma
função-custo gerada a partir de critérios de desempenho que determinam quais fatores
devem ser levados em consideração para obtenção da Lei de Controle.
Uma função custo da estratégia de variância mínima pode ser obtida pela
minimização da variância da variável controlada e isto pode ser conseguido através da
seguinte expressão:
J 1 = σ[ y ( k )] = E[ y 2 ( k )]
(A.42)
179
onde:
y(k) – variável controlada;
E[y(k)] – esperança matemática ou média aritmética da variável controlada;
E[y2(k)] = σ[y(k)] – variância da variável controlada.
A estratégia MV, apesar de vantajosa pela sua simplicidade, possui algumas
desvantagens, restringindo sua utilização para sistemas relativamente simples.
As principais desvantagens da estratégia MV, de acordo com VAZ (1999), são
relativas ao fato de ser aplicável apenas a sistemas de fase-mínima, também pela
impossibilidade de penalizar ações excessivas de controle, e pela não garantia de erro
médio nulo em regime permanente, devido à ausência de parâmetros de projeto.
Segundo ISERMANN et al (1992) essas desvantagens podem ser superadas
através de um controlador de variância mínima generalizada que introduz na função custo
o sinal de referência, as variáveis auxiliares e ainda uma ponderação “r” na variável
manipulada, de acordo com a equação (A.43).
J 2 = E{[ y(k + d + 1) − w (k + d + 1)]2 + r.u 2 (k )}
(A.43)
onde:
E{.} – esperança matemática;
y – variável controlada;
w – sinal de referência;
u – variável manipulada;
r – ponderação da variável manipulada.
Observe-se que na equação (A.43), ao contrário da equação (A.42), não se tem
interesse apenas em minimizar a variância da variável controlada, ao invés disso a intenção
é minimizar a variância de uma combinação entre a variável controlada, o sinal de
referência e a variável manipulada.
O projeto de um GMV considera o retardo de tempo e as perturbações (ruídos)
que incidem no sistema, de acordo com o diagrama de blocos da figura A.10.
180
C
D
ruído
B −d
⋅z
A
+
υ
Referência +
w
–
erro
e
QQ
PP
Sinal de
controle
u
n
Saída
yu +
y
Figura A.10 – Controle do sistema perturbado por um ruído estocástico.
A função de transferência do controlador linear geral é escrita como:
−1
− nqq
u ( k ) QQ ( z −1 ) qq 0 + qq1 ⋅ z + L + qq nqq ⋅ z
G R (k ) =
=
=
e( k ) PP ( z −1 )
1 + pp1 ⋅ z −1 + L + pp npp ⋅ z − npp
(A.44)
onde
u(k) – sinal de entrada;
e(k) – erro do sinal;
qqi, ppi – parâmetros dos polinômios QQ e PP, respectivamente;
nqq, npp – ordem dos polinômios QQ e PP, respectivamente.
A função de transferência do sistema é escrita como:
Gp(k ) =
y u (k ) B(z −1 ) −d
b1 ⋅ z −1 + L + b nb ⋅ z − nb
=
⋅
z
=
⋅ z −d
u (k ) A(z −1 )
1 + a1 ⋅ z −1 + L + a na ⋅ z −na
onde:
yu(k) – sinal de saída do sistema;
u(k) – sinal de entrada do sistema;
ai, bi – parâmetros dos polinômios A e B, respectivamente;
na, nb – ordem dos polinômios A e B, respectivamente;
d – atraso de transporte;
Obs.: b1 ≠ 0.
(A.45)
181
A função de transferência do filtro do ruído é escrita como:
n (k ) C(z −1 ) 1 + c1 ⋅ z −1 + L + c nc ⋅ z − nc
Gn ( k ) =
=
=
υ( k ) D(z −1 ) 1 + d1 ⋅ z −1 + L + d nd ⋅ z − nd
(A.46)
onde
n(k) – ruído branco filtrado;
υ(k) – ruído branco;
ci, di – parâmetros dos polinômios C e D, respectivamente;
nc, nd – ordem dos polinômios C e D, respectivamente;
Obs.: Os polinômios C e D são mônicos.
Do diagrama de blocos da figura A.10, observa-se que o sinal de saída é
contaminado por um ruído:
y( k ) = y u ( k ) + n ( k )
(A.47)
onde:
yu(k) – sinal de saída do sistema;
n(k) – ruído branco filtrado;
y(k) – sinal da saída final do sistema perturbado pelo ruído branco filtrado.
Substituindo as equações (A.45) e (A.46) na equação (A.47), obtém-se:
B(z −1 ) −d
C(z −1 )
y( k ) =
⋅ z ⋅ u (k ) +
⋅ υ(k )
A(z −1 )
D(z −1 )
(A.48)
O objetivo do controlador de variância mínima é compensar o ruído n(k) e isto só
é possível fazendo uma predição de passo “d+1”, porque o atraso de tempo do sistema faz
com que a variável manipulada no tempo “k”, u(k), influencie a variável controlada no
tempo “k+d+1”, ou seja, y(k+d+1).
182
Para obtenção da predição, separa-se o filtro do ruído em duas partes de acordo
com ISERMANN et al (1992), como segue.
C(z −1 )
L(z −1 ) −( d+1)
−1
= F(z ) +
⋅z
D(z −1 )
D(z −1 )
(A.49)
F(z −1 ) = 1 + f1.z −1 + L + f d .z − d
(A.50)
L(z −1 ) = l 0 + l 1.z −1 + L + l m −1.z − ( m −1)
(A.51)
onde:
Os polinômios das equações (A.50) e (A.51) serão determinados pela seguinte
identidade, que resulta da equação (A.49):
C(z-1 ) = D(z -1 ) ⋅ F(z -1 ) + L(z-1 ) ⋅ z − ( d+1)
(A.52)
Da equação (A.46) pode-se escrever a predição do distúrbio na etapa “d+1” a
frente, como segue.
C(z −1 )
n (k + d + 1) =
⋅ υ(k + d + 1)
D(z −1 )
(A.53)
Colocando a equação (A.49) na etapa “d+1” à frente e substituindo-a na equação
(A.53), tem-se:
n (k + d + 1) =
L( z − 1 )
⋅ υ(k ) + F(z −1 ) ⋅ υ(k + d + 1)
D(z −1 )
(A.54)
Analisando inicialmente o primeiro termo do lado direito da equação (A.54)
observa-se que esse é conhecido no tempo “k”, desde que “υ(k)” possa ser determinado em
função dos valores passados das variáveis manipuladas e controladas. Para isso, da
equação (A.46), obtém-se:
183
υ(k ) =
D(z −1 )
⋅ n (k )
C(z−1 )
(A.55)
e ainda das equações (A.46) e (A.48), obtém-se:
B(z −1 ) −d
y( k ) =
⋅ z ⋅ u (k ) + n (k ) ⇒
A(z −1 )
B(z −1 ) −d
n ( k ) = y( k ) −
⋅ z ⋅ u (k )
A(z −1 )
(A.56)
Substituindo a equação (A.56) na equação (A.55), obtém-se “υ(k)” em função das
variáveis manipuladas e controladas, como segue:
D( z −1 )
B( z −1 ) −d
υ( k ) =
⋅ u (k )
−1 ⋅ y( k ) −
−1 ⋅ z
C( z )
A(z )
(A.57)
Portanto, substituindo a equação (A.57) na equação (A.54), obtém-se:
n ( k + d + 1) =
L( z −1 )
B( z − 1 ) − d
⋅
y
(
k
)
−
⋅ u ( k ) + F( z −1 ) ⋅ υ( k + d + 1)
−1
−1 ⋅ z
C( z )
A(z )
(A.58)
A predição de “d+1” passos a frente da saída final do sistema “y” é obtida pela
equação (A.47), como segue:
y(k + d + 1) = y u (k + d + 1) + n (k + d + 1)
(A.59)
A predição de “d+1” passos a frente da saída do sistema “yu” é obtida a partir da
equação (A.45), como segue:
y u (k + d + 1) =
B(z −1 ) −d
⋅ z ⋅ u(k + d + 1) ⇒
A(z −1 )
184
y u (k + d + 1) =
B(z −1 )
⋅ z ⋅ u (k )
A(z −1 )
(A.60)
Substituindo as equações (A.60) e (A.58) na equação (A.59) obtém-se a predição
da saída final, como segue:
B(z −1 )
L ( z −1 )
B(z −1 ) −d
y(k + d + 1) =
⋅
z
⋅
u
(
k
)
+
⋅
y
(
k
)
−
⋅
z
⋅
u
(
k
)
+L
A(z −1 )
D(z −1 )
A(z −1 )
(A.61)
L + F(z −1 ) ⋅ υ(k + d + 1)
ou seja:
y(k + d + 1) =
B(z −1 )
L(z −1 )
L(z −1 ) B(z −1 ) −d
⋅
z
⋅
u
(
k
)
+
⋅
y
(
k
)
−
⋅ z ⋅ u (k ) + F(z −1 ) ⋅ υ(k + d + 1) ⇒
C(z −1 )
C(z −1 ) A(z −1 )
A(z −1 )
y( k + d + 1) =
B( z −1 )
L ( z −1 )
L( z −1 ) B( z −1 ) −d
⋅
y
(
k
)
+
⋅
z
−
⋅ z ⋅ u ( k ) + F( z −1 ) ⋅ υ( k + d + 1) ⇒
−1
C( z −1 ) A( z −1 )
C( z −1 )
A(z )
y( k + d + 1) =
B( z −1 ) ⋅ C( z −1 ) ⋅ z − L( z −1 ) ⋅ B( z −1 ) ⋅ z −d
L( z −1 )
⋅ u ( k ) + F( z −1 ) ⋅ υ( k + d + 1) ⇒
⋅
y
(
k
)
+
−1
−1
C( z −1 )
A
(
z
)
⋅
C
(
z
)
y( k + d + 1) =
B( z −1 ) ⋅ z ⋅ [C(z −1 ) − L(z −1 ) ⋅ z − ( d+1) ]
L ( z −1 )
⋅ u (k ) + L
⋅
+
y
(
k
)
C(z −1 )
A(z −1 ) ⋅ C(z −1 )
L + F(z −1 ) ⋅ υ(k + d + 1)
(A.62)
A partir da identidade mostrada pela equação (A.52), pode-se escrever:
C(z-1 ) − L(z-1 ) ⋅ z − ( d+1) = D(z-1 ) ⋅ F(z-1 )
(A.63)
Substituindo a equação (A.63) na equação (A.62), tem-se:
L(z−1 )
B(z−1 ) ⋅ z ⋅ D(z−1 ) ⋅ F(z−1 )
y(k + d + 1) =
⋅ y(k) +
⋅ u(k) + F(z−1 ) ⋅ υ(k + d + 1) (A.64)
C(z−1 )
A(z−1 ) ⋅ C(z−1 )
O último termo tanto da equação (A.64) como das equações (A.58), (A.61) e
(A.62) é completamente aleatório, tem média zero e não está correlacionado com os sinais
185
sem perturbação (ISERMANN et al, 1992). Os dois primeiros termos do lado direito da
equação (A.64) são designados por “y(k+d+1/k)”, ou seja, é a saída estimada no tempo
“k+d+1” baseando-se nos dados no tempo “k”, então, reescrevendo a equação (A.64), temse:
y(k + d + 1) = y(k + d + 1 / k) + F(z−1 ) ⋅ υ(k + d + 1)
(A.65)
onde:
y(k + d + 1/ k) =
L(z−1 )
B(z−1 ) ⋅ z ⋅ D(z−1 ) ⋅ F(z−1 )
⋅
y
(
k
)
+
⋅ u (k )
C(z−1 )
A(z−1 ) ⋅ C(z−1 )
(A.66)
Como o objetivo do controlador GMV é minimizar a função custo “J2”, e não
sendo possível obter os valores reais da saída no tempo “k+d+1”, mas é possível obter os
valores estimados dessa saída no tempo “k+d+1”, baseando-se nos valores no tempo “k”,
como mostra a equação (A.66). A função custo “J2” pode ser reescrita substituindo-se a
equação (A.65) na equação (A.43).
J 2 = E{[ y(k + d + 1 / k ) − w (k + d + 1)]2 + r.u 2 (k )} + E{[F(z −1 ) ⋅ υ(k + d + 1)]2 } (A.67)
O mínimo da função custo “J2” da equação (A.67) com relação “u(k)”, pode ser
obtido igualando o gradiente de “J2” a zero como segue:
∂J 2
∂y(k + d + 1 / k )
= 2 ⋅ [ y(k + d + 1 / k ) − w (k + d + 1)] ⋅
+ 2 ⋅ r.u (k ) = 0
∂u (k )
∂u (k )
(A.68)
Segundo ISERMANN et al (1992) como os polinômios “A(z-1)”, “C(z-1)”,
“D(z-1)” e “F(z-1)” são mônicos e da equação (A.66), tem-se:
∂y(k + d + 1 / k )
= b1
∂u (k )
(A.69)
186
Substituindo as equações (A.66) e (A.69) na equação (A.68) obtém-se:
L( z −1 )
B( z −1 ) ⋅ z ⋅ D( z −1 ) ⋅ F( z −1 )
⋅ u ( k ) − w ( k + d + 1) ⋅ b1 + r.u ( k ) = 0 (A.70)
C(z −1 ) ⋅ y( k ) +
−1
−1
A ( z ) ⋅ C( z )
Manipulando a equação (A.70) obtém-se a seguinte lei de controle:
u (k ) =
A(z −1 ) ⋅ C(z −1 ) ⋅ w (k + d + 1) − L(z −1 ) ⋅ A(z −1 ) ⋅ y(k )
r
D(z −1 ) ⋅ F(z −1 ) ⋅ z ⋅ B(z −1 ) + ⋅ C(z −1 ) ⋅ A(z −1 )
b1
(A.71)
De acordo com ÅSTRÖM (1970), ISERMANN et al (1992) e MONTENEGRO
(2007), pode-se assumir que o denominador do filtro do ruído é igual ao denominador da
função de transferência do sistema, ou seja, “D(z-1) = A(z-1)”, assim como “C(z-1) = 1”,
resultando na seguinte lei de controle de variância mínima generalizada:
w (k + d + 1) − L(z −1 ) ⋅ y(k )
u (k ) =
r
F(z −1 ) ⋅ z ⋅ B(z −1 ) +
b1
(A.72)
A partir das considerações anteriores, a equação (A.48) resulta em:
B(z −1 ) −d
1
y( k ) =
⋅ u (k ) +
⋅ υ(k )
−1 ⋅ z
A( z )
A(z −1 )
(A.73)
A lei de controle da equação (A.72) é obtida baseando-se no modelo ARX,
conforme pode ser comparado com os modelos da tabela A.1.
Ainda por causa da simplificação, “D(z-1) = A(z-1)” e “C(z-1) = 1”, a identidade da
equação (A.52), resulta na equação (A.74), simplificando a obtenção dos termos dos
polinômios F(z-1) e L(z-1).
1 = A(z-1 ) ⋅ F(z-1 ) + L(z-1 ) ⋅ z − ( d+1)
(A.74)
187
A.8 CONCLUSÃO
Este capítulo apresentou uma abordagem incluindo definições e conceitos iniciais
sobre controle para facilitar o entendimento dos tipos de modelagem e identificação de
sistema, além de uma base teórica para a obtenção da lei de controle do controlador de
Variância Mínia Generalizada (GMV).
APÊNDICE B
- LISTAGEM DOS PROGRAMAS EM MATLAB
B.1 PROGRAMA PARA DETERMINAÇÃO DOS PARÂMETROS DA EQUAÇÃO
A DIFERENÇAS DO SISTEMA SIMULADO
%==========================================================
% OBTENÇÃO DAS FUNÇÕES DE TRANSFERÊNCIA CONTÍNUAS DOS
% MODELOS DE CAIXA BRANCA DOS MANIPULADORES HIDRÁULICOS
%
% CONVERSÃO DAS FT CONTÍNUAS PARA FT DISCRETAS
%
% DETERMINAÇÃO DOS PARÂMETROS DA EQUAÇÃO A DIFERENÇAS
% DOS MODELOS QUE FORAM DISCRETIZADOS
%==========================================================
clc
clear all
close all
format long e
syms s
%==========================================================
%Funções de Transferências para o deslocamento em x e em z
%
% Obs.: O subíndece 1 das variáveis, está relacionado com
% o pistão de deslocamento no eixo X e o subíndece 2 com
% o pistão de deslocamento no eixo Z.
%==========================================================
%Dados
bt=14e8;%.......Módulo de elasticidade volumétrico:[N/m²]
M1=150;%........Massa 1:[kg]
M2=100;%........Massa 2:[kg]
c=163;%.........Coeficiente de atrito:[Ns/m]
vt=0.874e-3;%...Volume total de fluido:[m³]
A1=1.075e-3;%...Área do pistão 1:[m²]
A2=1.075e-3;%...Área do pistão 2:[m²]
Kc=2.4e-12;%....Coeficiente de vazão-pressão:[m^5/Ns]
Kq=0.73;%.......Ganho de vazão:[m²/s]
Lf=0;%..........Coeficiente de fuga:[m^5/Ns]
189
%Determinação das variáveis das FT
%
k1_1
%Gx1(s)=---------------------- FT para o deslocamento em x
%
a1_1.s³+a2_1.s²+a3_1.s
%
%
k1_2
%Gz2(s)=---------------------- FT para o deslocamento em z
%
a1_2.s³+a2_2.s²+a3_2.s
k1_1=Kq*A1/(A1^2+c*Lf+c*Kc);
k1_2=Kq*A2/(A2^2+c*Lf+c*Kc);
a1_1=vt*M1/((4*bt)*(A1^2+c*Lf+c*Kc));
a1_2=vt*M2/((4*bt)*(A2^2+c*Lf+c*Kc));
a2_1=(M1*Lf+M1*Kc+vt*c/(4*bt))/(A1^2+c*Lf+c*Kc);
a2_2=(M2*Lf+M2*Kc+vt*c/(4*bt))/(A2^2+c*Lf+c*Kc);
a3_1=1;
a3_2=1;
%Representação da FT para o deslocamento no eixo X
disp('FT para o deslocamento em X')
numf1=[0 0 0 k1_1];
denf1=[a1_1 a2_1 a3_1 0];
disp('G1(s) =')
G1=tf(numf1,denf1)
%Representação da FT para o deslocamento no eixo Z
disp('FT para o deslocamento em Z')
numf2=[0 0 0 k1_2];
denf2=[a1_2 a2_2 a3_2 0];
disp('G2(s) =')
G2=tf(numf2,denf2)
%==========================================================
% Transformação das funções contínuas no domínio "s"
% para as funções discretas no domínio "z" utilizando
% a aproximação explícita de Euler (ZOH).
%==========================================================
%Representação da FT discreta para o deslocamento no eixo X
ts=0.01;%........Período de amostragem = 0.01
disp('FT discreta para o deslocamento em X')
[numZ1,denZ1]=c2dm(numf1,denf1,ts,'zoh');%....G1(s)--->G1(z)
disp('G1(z) =')
sist_discr=tf(numZ1,denZ1,ts)
disp('zeros do sistema discreto')
zeros1=roots (numZ1)
disp('pólos do sistema discreto')
polos=roots(denZ1)
%Representação da FT discreta para o deslocamento no eixo Z
ts=0.01;%........Período de amostragem = 0.01
disp('FT discreta para o deslocamento em Z')
[numZ2,denZ2]=c2dm(numf2,denf2,ts,'zoh');%....G2(s)--->G2(z)
disp('G2(z) =')
sist_discr=tf(numZ2,denZ2,ts)
190
%==========================================================
%Parâmetros da equação a diferenças
%==========================================================
%
% Y(z)
bo.z^2 + b1.z + b2
(z^-3)
%------ = ------------------------ x ------ ==>
% U(z)
z^3 + a1.z^2 + a2.z + a3
(z^-3)
%
% Y(z)
bo.z^-1 +b1.z^-2 +b2.z^-3
[ 0 bo b1 b2 ]
%------ = ---------------------------- = -------------% U(z)
1+ a1.z^-1 +a2.z^-2 +a3.z^-3
[ 1 a1 a2 a3 ]
%
%y(t)=bo.u(t-1)+b1.u(t-2)+b2.u(t-3)-a1.y(t-1)-a2.y(t-2)-a3.y(t-3)
%Parâmetros da equação a diferenças do deslocamento no eixo X
disp('Parâmetros da equação a diferenças do eixo X')
bo_1=numZ1(2)
b1_1=numZ1(3)
b2_1=numZ1(4)
a1_1=denZ1(2)
a2_1=denZ1(3)
a3_1=denZ1(4)
%Parâmetros da equação a diferenças do deslocamento no eixo Z
disp('Parâmetros da equação a diferenças do eixo Z')
bo_2=numZ2(2)
b1_2=numZ2(3)
b2_2=numZ2(4)
a1_2=denZ2(2)
a2_2=denZ2(3)
a3_2=denZ2(4)
B.2 PROGRAMA MQR EM MATLAB
%==========================================================
%
MQR PARA O GMV
%==========================================================
%
% Y(z)
b1.z-1 + b2.z-2
% ---- = ----------------------- , onde
% U(z)
1 + a1.z^-1 + a2.z^-2
%
% y(t) = -a1.y(t-1) - a2.y(t-2) + b1.u(t-1) + b2.u(t-2)
%===========================================================
clc
clear all
close all
format long e
syms s
Ni=1000; % Número de iterações
%Condições iniciais
p1=10000*eye(4,4);
teta1=[0;0;0;0];
191
p2=10000*eye(4,4);
teta2=[0;0;0;0];
for t=1:3;
%Inicialização da entrada degrau
u1(t)=0;
u2(t)=0;
%Inicialização dos vetores das saídas reais
y1(t)=0;
y2(t)=0;
%Inicialização dos vetores das saídas estimadas
yest_1(t)=0;
yest_2(t)=0;
%Inicialização dos vetores das saídas simuladas
ysimu_1(t)=0;
ysimu_2(t)=0;
%Inicialização dos vetores Erro
erro1(t)=0;
%erro de estimação
erroq1(t)=0; %erro de previsão
erroqm1(t)=0; %erro quadrático
erro2(t)=0;
%erro de estimação
erroq2(t)=0; %erro de previsão
erroqm2(t)=0; %erro quadrático
%Inicialização dos parâmetros das matrizes teta
a1_1(t)=teta1(1);
a2_1(t)=teta1(2);
b1_1(t)=teta1(3);
b2_1(t)=teta1(4);
a1_2(t)=teta2(1);
a2_2(t)=teta2(2);
b1_2(t)=teta2(3);
b2_2(t)=teta2(4);
end;
%Inicialização do processo iterativo para
%estimação dos parâmetros do modelo.
% Condições iniciais da média de y1 e de y2
somay1=0;
somay2=0;
for t=4:Ni;
%Entrada degrau
u(t)=0.1;
%Gerando PRBS
if rand > 0.5; %Geração do ruído para entrada 1
uu1(t)=0.05;
else
uu1(t)=-0.05;
end
192
if rand > 0.5; %Geração do ruído para entrada 2
uu2(t)=0.05;
else
uu2(t)=-0.05;
end
u1(t)=uu1(t)+u(t);
u2(t)=uu2(t)+u(t);
%Geração de ruído branco com média nula e variância unitária:
%Ruído e1(t):
x1=rand(Ni,1);
z1=(x1/mean(x1))-1;
e1=sqrt(1/var(z1))*z1;
%Ruído e2(t):
x2=rand(Ni,1);
z2=(x2/mean(x2))-1;
e2=sqrt(1/var(z2))*z2;
% EQUAÇÕES A DIFERENÇAS
% Parâmetros da equação a diferenças do eixo X
bbo_1=4.200515576587980e+000;
bb1_1=1.207074758319132e+001;
bb2_1=3.840586386293670e+000;
aa1_1=1.144820990990225e-001;
aa2_1=-2.662851428016783e-001;
aa3_1=-8.481969562973442e-001;
% Equação a diferenças do eixo X com acréscimo de pertubação
y1(t)=bbo_1*u1(t-1)+bb1_1*u1(t-2)+bb2_1*u1(t-3)...
-aa1_1*y1(t-1)-aa2_1*y1(t-2)-aa3_1*y1(t-3)+e1(t)*0.00005;
% Parâmetros da equação a diferenças do eixo Z
bbo_2=5.566280622852146e+000;
bb1_2=1.327493024822288e+001;
bb2_2=5.053235498561276e+000;
aa1_2=6.762929467224641e-001;
aa2_2=-8.326920300067963e-001;
aa3_2=-8.436009167156678e-001;
% Equação a diferenças do eixo Z com acréscimo de pertubação
y2(t)=bbo_2*u2(t-1)+bb1_2*u2(t-2)+bb2_2*u2(t-3)...
-aa1_2*y2(t-1)-aa2_2*y2(t-2)-aa3_2*y2(t-3)+e2(t)*0.00005;
% Cálculo da média de y1 e de y2
somay1=somay1+y1(t);
ymed1=somay1/Ni;
%média de y1
somay2=somay2+y2(t);
ymed2=somay2/Ni;
%média de y2
%Montado a matriz FI a partir dos dados reais
fi1=[-y1(t-1); -y1(t-2); u1(t-1); u1(t-2)];
fi2=[-y2(t-1); -y2(t-2); u2(t-1); u2(t-2)];
%Cálculo do erro de estimação
erro1(t)=y1(t)-teta1'*fi1;
193
erro2(t)=y2(t)-teta2'*fi2;
%Fator de esquecimento
lamb=1;
%Cálculo do ganho do estimador
k1=p1*fi1/(lamb+fi1'*p1*fi1);
k2=p2*fi2/(lamb+fi2'*p2*fi2);
%Cálculo dos novos valores da matriz dos parâmetros
teta1=teta1+k1*erro1(t);
teta2=teta2+k2*erro2(t);
%Atualização da matriz de covariância
p1=(1/lamb)*(p1-k1*fi1'*p1);
p2=(1/lamb)*(p2-k2*fi2'*p2);
%Atualização dos parâmetros
a1_1(t)=teta1(1);
a2_1(t)=teta1(2);
b1_1(t)=teta1(3);
b2_1(t)=teta1(4);
a1_2(t)=teta2(1);
a2_2(t)=teta2(2);
b1_2(t)=teta2(3);
b2_2(t)=teta2(4);
%Determinação das saídas estimadas
yest_1(t)=fi1'*teta1;
yest_2(t)=fi2'*teta2;
% Cálculo do erro de previsão e erro quadrático
erroq1(t)=erroq1(t-1)+(y1(t)-yest_1(t))^2;
erroqm1(t)=erroqm1(t-1)+(y1(t)-ymed1)^2;
erroq2(t)=erroq2(t-1)+(y2(t)-yest_2(t))^2;
erroqm2(t)=erroqm2(t-1)+(y2(t)-ymed2)^2;
end;
%coeficiente de correlação múltipla
rr1=1-(erroq1(Ni)/erroqm1(Ni))
rr2=1-(erroq2(Ni)/erroqm2(Ni))
%GRÁFICOS
t=1:Ni;
tt=t/100;%para converter de 10ms para 1s
%Evolução dos parâmetros do pistão 1
figure(11)
plot(tt,a1_1(t),'r',tt,a2_1(t),'b',...
tt,b1_1(t),'g',tt,b2_1(t),'m','LineWidth',2)
grid on
legend('a1','a2','b1','b2');
xlabel('Tempo (s)');
ylabel('Evolução dos parâmetros para o pistão 1');
%Pistão 1 seguindo a trajetória de referência
figure(12)
hold on
194
plot(tt,yest_1(t),'b',tt,y1(t),'r','LineWidth',1)
%axis([0 Ni/100 0 0.2]);
legend('saída estimada','saída do sistema',0);
xlabel('Tempo (s)');
ylabel('Posição da carga M2 no eixo "X" (m)');
hold off
grid on
%Deslocamento do carretel da válvula_1 no eixo X (u1)
figure(14)
plot(tt,u1(t),'b','LineWidth',2)
xlabel('Tempo (s)');
ylabel('Posição do carretel da válvula 1 (m)');
grid on
%Evolução dos parâmetros do pistão 2
figure(21)
plot(tt,a1_2(t),'r',tt,a2_2(t),'b',...
tt,b1_2(t),'g',tt,b2_2(t),'m','LineWidth',2)
grid on
legend('a1','a2','b1','b2');
xlabel('Tempo (s)');
ylabel('Evolução dos parâmetros para o pistão 2');
%Pistão 2 seguindo a trajetória de referência
figure(22)
hold on
plot(tt,yest_2(t),'b',tt,y2(t),'r','LineWidth',1)
%axis([0 Ni/100 0 0.2]);
legend('saída estimada','saída do sistema',0);
xlabel('Tempo (s)');
ylabel('Posição da carga M2 no eixo "Z" (m)');
hold off
grid on
%Deslocamento do carretel da válvula_2 no eixo Z (u2)
figure(24)
plot(tt,u2(t),'b','LineWidth',2)
xlabel('Tempo (s)');
ylabel('Posição do carretel da válvula 2 (m)');
grid on
B.3 PROGRAMA EM MATLAB DO CONTROLADOR GMV PARA SEGUIR AS
TRAJETÓRIAS DE REFERÊNCIA
%==========================================================
%
CONTROLADOR DE VARIÂNCIA MÍNIMA GENERALIZADO
%==========================================================
clc
clear all
close all
format long e
syms s
195
%Variáveis do sistema que podem ser ajustadas para o
%acompanhamento da trajetória de referência
lambda=1;%fator de esquecimento
tg=7;%instante de mudança entre o controlador
%proporcional e o controlador GMV.
kp=0.01;%constante de proporcionalidade do
%controlador proporcional
r1=40;%ponderação da variável controlada u1
r2=r1;%ponderação da variável controlada u2
%ESCOLHA DAS TRAJETÓRIAS
%Informe a trajetória a ser seguida
% 1->em degraus 2->cúbica 3->circular
%ESCOLHA O CASO PARA EXECUTAR CADA TRAJETÓRIA
% A trajetória em degraus é melhor executada para as
% nos casos: 2, 3, 4 ou 5, preferencialmente 3 ou 5
% As trajetórias circular e cúbica são melhor
% executadas nos casos 1, 4 ou 5
traj=3;
caso=1;
if caso==1;
%---------------------------------------------------------%
CONFIGURAÇÕES DO CASO (1)
%---------------------------------------------------------%Condição inicial para a matriz de covariância
pp1=10000000;
p1=pp1*eye(4,4);
p2=p1;
%Condição inicial para a matriz teta
teta1=[0;0;0;0];
teta2=teta1;
%rt utilização ou não da restrição do curso do carretel
%rt='sim' usar restrição ou rt='nao' não usar restrição
rt='nao';
%--------------------------------------------------------elseif (caso==2|caso==3);
%---------------------------------------------------------%
CONFIGURAÇÕES DO CASO (2) E DO CASO (3)
%---------------------------------------------------------%CASO 2
%Condição inicial para a matriz de covariância
p1=[100 0 0 0; 0 100000 0 0; 0 0 10000 0; 0 0 0 100000];
p2=p1;
%Condição inicial para a matriz teta
teta1=[0;0;0;0];
teta2=teta1;
rt='nao';%caso 2 - sem restrição no deslocamento de u
%CASO 3 - a diferença para o caso 2 é a variável rt
if caso==3;
rt='sim';%caso 3 - com restrição no deslocamento de u
end
%---------------------------------------------------------
196
elseif (caso==4|caso==5);
%---------------------------------------------------------%
CONFIGURAÇÕES DO CASO (4) E DO CASO (5)
%---------------------------------------------------------%CASO 4
%Condição inicial para a matriz de covariância
pp1=100;
p1=pp1*eye(4,4);
p2=p1;
%Condição inicial para a matriz teta
teta1=[-.1;-1;4;9];
teta2=teta1;
%rt utilização ou não da restrição do curso do carretel
%rt='sim' usar restrição ou rt='nao' não usar restrição
rt='nao';
%CASO 5 - a diferença para o caso 4 é a variável rt
if caso==5;
rt='sim';%caso 5 - com restrição no deslocamento de u
end
%--------------------------------------------------------end
if traj==1;
Ni=2000;%Número de iterações para traj. em degraus
elseif traj==2;
Ni=300;%Número de iterações para traj. cúbica
else
Ni=1000;%Número de iterações por volta na traj circular
end
for t=1:3;
%Inicialização da variável controlada
u1(t)=0;
u2(t)=0;
%Inicialização dos vetores das saídas reais
%deslocamento inicial do pistão 1 na traj circular
y1(t)=0; if traj==3; y1(t)=.15; end
y2(t)=0;
%Inicialização dos vetores das saídas estimadas
%deslocamento inicial do pistão 1 na traj circular
yest_1(t)=0; if traj==3; yest_1(t)=0.15; end
yest_2(t)=0;
%Inicialização dos vetores Erro
erro1(t)=0;
%erro de estimação
erroq1(t)=0; %erro de previsão
erroqm1(t)=0; %erro quadrático
erro2(t)=0;
%erro de estimação
erroq2(t)=0; %erro de previsão
erroqm2(t)=0; %erro quadrático
%Inicialização dos parâmetros das matrizes teta
a1_1(t)=teta1(1);
a2_1(t)=teta1(2);
b1_1(t)=teta1(3);
b2_1(t)=teta1(4);
197
a1_2(t)=teta2(1);
a2_2(t)=teta2(2);
b1_2(t)=teta2(3);
b2_2(t)=teta2(4);
%Início do erro de saída
esai1(t)=0;
esai2(t)=0;
%Início das variáveis para a função custo
SQ_1(t)=0;
II_1(t)=0;
SQ_2(t)=0;
II_2(t)=0;
end;
%TRAJETÓRIAS DE REFERÊNCIA
%-----------------------------------------------%Trajetória de referência em degraus
if traj==1;
%Intervalos
N1=500;N2=1000;N3=1500;
%Patamares
pt1=0.1; pt2=0.2; pt3=0.05; pt4=0.15;
%Referências
for t=4:Ni+2;
if t<=N1;
wr(t)=pt1;
elseif t>N1 & t<=N2;
wr(t)=pt2;
elseif t>N2 & t<=N3;
wr(t)=pt3;
else
wr(t)=pt4;
end
end
wr1=wr;%Trajetória de referência para o pistão 1
wr2=wr;%Trajetória de referência para o pistão 2
%-----------------------------------------------%Trajetória de referência polinomial cúbica
elseif traj==2;
for t=1:Ni+2;
if t<=100;
%Livro: Robot Dynamics and Control pág 197.
%Autores: Spong, M. W. e Vidyasagar, M.
wi=0;wf=0.15; %posição inicial e final
vi=0;vf=0;
%velocidade inicial e final
tf=100;
%tempo final da trajetória
%Coeficientes da trajetória
ao=wi;
a1=vi;
a2=(3*(wf-wi)-(2*vi+vf)*tf)/tf^2;
a3=(2*(wi-wf)+(vi+vf)*tf)/tf^3;
%Função polinomial cúbica
wr(t)=ao+a1*t+a2*t^2+a3*t^3;
wr1(t)=wr(t);
wr2(t)=wr(t);
else
wr1(t)=0.15;
wr2(t)=0.15;
198
end
end
%-----------------------------------------------%Trajetória de referência circular
elseif traj==3;
%Ni - Número de iterações por volta
voltas=1; %número de voltas
it=voltas/Ni; %intervalo de amostragem
alfa=it*2*pi; %período de amostragem em radiano
%Determinação da trajetória de referência
for t=1:Ni+2;
wr1(t)=0.15*cos(alfa*(t));
wr2(t)=0.15*sin(alfa*(t));
end
%-----------------------------------------------end
%Inicialização do processo iterativo para
%estimação dos parâmetros do modelo.
% Condições iniciais da média de y1 e de y2
somay1=0;
somay2=0;
%Geração de ruído branco com média nula e variância unitária:
%Ruído rd1(t):
x1=rand(Ni,1);
z1=(x1/mean(x1))-1;
rd1=sqrt(1/var(z1))*z1;
%Ruído rd2(t):
x2=rand(Ni,1);
z2=(x2/mean(x2))-1;
rd2=sqrt(1/var(z2))*z2;
for t=4:Ni;
% EQUAÇÕES A DIFERENÇAS
% Parâmetros da equação a diferenças do eixo X
bbo_1=4.200515576587980e+000;
bb1_1=1.207074758319132e+001;
bb2_1=3.840586386293670e+000;
aa1_1=1.144820990990225e-001;
aa2_1=-2.662851428016783e-001;
aa3_1=-8.481969562973442e-001;
% Equação a diferenças do eixo X com acréscimo de pertubação
y1(t)=bbo_1*u1(t-1)+bb1_1*u1(t-2)+bb2_1*u1(t-3)...
-aa1_1*y1(t-1)-aa2_1*y1(t-2)-aa3_1*y1(t-3)+rd1(t)*0.00005;%0.0005;
% Parâmetros da equação a diferenças do eixo Z
bbo_2=5.566280622852146e+000;
bb1_2=1.327493024822288e+001;
bb2_2=5.053235498561276e+000;
aa1_2=6.762929467224641e-001;
aa2_2=-8.326920300067963e-001;
aa3_2=-8.436009167156678e-001;
199
% Equação a diferenças do eixo Z com acréscimo de pertubação
y2(t)=bbo_2*u2(t-1)+bb1_2*u2(t-2)+bb2_2*u2(t-3)...
-aa1_2*y2(t-1)-aa2_2*y2(t-2)-aa3_2*y2(t-3)+rd2(t)*0.00005;
% Cálculo da média de y1 e de y2
somay1=somay1+y1(t);
ymed1=somay1/Ni;
%média de y1
somay2=somay2+y2(t);
ymed2=somay2/Ni;
%média de y2
%Montado a matriz FI a partir dos dados reais
fi1=[-y1(t-1); -y1(t-2); u1(t-1); u1(t-2)];
fi2=[-y2(t-1); -y2(t-2); u2(t-1); u2(t-2)];
%Cálculo do erro de estimação
erro1(t)=y1(t)-teta1'*fi1;
erro2(t)=y2(t)-teta2'*fi2;
%Fator de esquecimento
lamb=lambda;
%Cálculo do ganho do estimador
k1=p1*fi1/(lamb+fi1'*p1*fi1);
k2=p2*fi2/(lamb+fi2'*p2*fi2);
%Cálculo dos novos valores da matriz dos parâmetros
teta1=teta1+k1*erro1(t);
teta2=teta2+k2*erro2(t);
%Atualização da matriz de covariância
p1=(1/lamb)*(p1-k1*fi1'*p1);
p2=(1/lamb)*(p2-k2*fi2'*p2);
%Atualização dos parâmetros
a1_1(t)=teta1(1);
a2_1(t)=teta1(2);
b1_1(t)=teta1(3);
b2_1(t)=teta1(4);
a1_2(t)=teta2(1);
a2_2(t)=teta2(2);
b1_2(t)=teta2(3);
b2_2(t)=teta2(4);
%Determinação das saídas estimadas
yest_1(t)=fi1'*teta1;
yest_2(t)=fi2'*teta2;
%Cálculo do erro de saída
esai1(t)=wr1(t)-y1(t);
esai2(t)=wr2(t)-y2(t);
% Cálculo do erro de previsão e erro quadrático
erroq1(t)=erroq1(t-1)+(y1(t)-yest_1(t))^2;
erroqm1(t)=erroqm1(t-1)+(y1(t)-ymed1)^2;
erroq2(t)=erroq2(t-1)+(y2(t)-yest_2(t))^2;
erroqm2(t)=erroqm2(t-1)+(y2(t)-ymed2)^2;
200
% Contrololador GMV - 1
% Da solução de Diaphantine
f1_1(t)=-a1_1(t);
lo_1(t)=-a2_1(t)+a1_1(t)*a1_1(t);
l1_1(t)=a2_1(t)*a1_1(t);
if t <= tg;
%tg - instante de saída do c.proporcional para entrada do GMV
kpp=kp;
u11(t)=kpp*esai1(t);%controlador proporcional
else
%CONTROLADOR GMV
u11(t)=(wr1(t+2)-lo_1(t)*y1(t)-l1_1(t)*y1(t-1)-...
(f1_1(t)*b1_1(t)+b2_1(t))*u1(t-1)-...
b2_1(t)*f1_1(t)*u1(t-2))/(b1_1(t)+r1/b1_1(t));
end
%Integrador
u1(t)=u1(t-1)+u11(t);
%Utilização ou não da restrição do curso do carretel
if strcmp('sim',rt)
if u1(t)>=1.2e-3
u1(t)=1.2e-3;
end
if u1(t)<=-1.2e-3
u1(t)=-1.2e-3;
end
end
% Contrololador GMV - 2
% Da solução de Diaphantine
f1_2(t)=-a1_2(t);
lo_2(t)=-a2_2(t)+a1_2(t)*a1_2(t);
l1_2(t)=a2_2(t)*a1_2(t);
if t <= tg;
%tg - instante de saída do c.proporcional para entrada do GMV
kpp=kp;
u22(t)=kpp*esai2(t);
else
u22(t)=(wr2(t+2)-lo_2(t)*y2(t)-l1_2(t)*y2(t-1)-...
(f1_2(t)*b1_2(t)+b2_2(t))*u2(t-1)-...
b2_2(t)*f1_2(t)*u2(t-2))/(b1_2(t)+r2/b1_2(t));
end
%Integrador
u2(t)=u2(t-1)+u22(t);
%Utilização ou não da restrição do curso do carretel
if strcmp('sim',rt)
if u2(t)>=1.2e-3
u2(t)=1.2e-3;
end
if u2(t)<=-1.2e-3
u2(t)=-1.2e-3;
end
201
end
end
%coeficiente de correlação múltipla
rr1=1-(erroq1(Ni)/erroqm1(Ni))
rr2=1-(erroq2(Ni)/erroqm2(Ni))
%Erro máximo de saída
[emaxs1,pmax1]=max(esai1);
tmax1=pmax1/100
emaxs1
[emaxs2,pmax2]=max(esai2);
tmax2=pmax2/100
emaxs2
%Valor máximo da variável de controle u(t)
%Informa o curso máximo do carretel da válvula
[umax1,pmax1]=max(u1);
tmax1=pmax1/100
umax1
[umax2,pmax2]=max(u2);
tmax2=pmax2/100
umax2
%GRÁFICOS
t=1:Ni;
tt=t/100;%para converter de 10ms para 1s
v=linspace(1,Ni);%criar linha no gráfico
vv=v/100;
%--------------------------------------------------------%Linhas de tolerância para traj. em degraus
if traj==1;
i1=linspace(1,5);%linha para a tolerância do intervalo 1
i2=linspace(6,10);%linha para a tolerância do intervalo 2
i3=linspace(11,15);%linha para a tolerância do intervalo 3
i4=linspace(16,20);%linha para a tolerância do intervalo 4
ii1=linspace(0.5,1);%linha para sobre_sinal do intervalo 1
ii2=linspace(5,6);%linha para sobre_sinal do intervalo 2
ii3=linspace(10,11);%linha para sobre_sinal do intervalo 3
ii4=linspace(15,16);%linha para sobre_sinal do intervalo 4
%linhas para tolerâncias de 2%
tol1p(i1)=pt1*1.02;
tol1n(i1)=pt1*0.98;
tol2p(i2)=pt2+abs(pt2-pt1)*.02;
tol2n(i2)=pt2-abs(pt2-pt1)*.02;
tol3p(i3)=pt3+abs(pt3-pt2)*.02;
tol3n(i3)=pt3-abs(pt3-pt2)*.02;
tol4p(i4)=pt4+abs(pt4-pt3)*.02;
tol4n(i4)=pt4-abs(pt4-pt3)*.02;
%linhas para o sobre sinal de 20%
ss1p(ii1)=pt1*1.2;%sobre sinal positivo para o patamar 1
ss1n(ii1)=pt1*0.8;%sobre sinal negativo para o patamar 1
ss2p(ii2)=pt2+abs(pt2-pt1)*.2;%sobre sinal positivo para o
ss2n(ii2)=pt2-abs(pt2-pt1)*.2;%sobre sinal negativo para o
ss3p(ii3)=pt3+abs(pt3-pt2)*.2;%sobre sinal positivo para o
ss3n(ii3)=pt3-abs(pt3-pt2)*.2;%sobre sinal negativo para o
ss4p(ii4)=pt4+abs(pt4-pt3)*.2;%sobre sinal positivo para o
ss4n(ii4)=pt4-abs(pt4-pt3)*.2;%sobre sinal negativo para o
patamar
patamar
patamar
patamar
patamar
patamar
2
2
3
3
4
4
202
%Valores dos sobre-sinais e o tempo de acomodação
[ymax1,pmax1]=max(y1(1:200));
sobrs1_1=((ymax1-pt1)/pt1)*100;
[ymax1,pmax1]=max(y1(500:600));
sobrs2_1=((ymax1-pt2)/(pt2-pt1))*100;
[ymin1,pmin1]=min(y1(1000:1100));
sobrs3_1=((pt3-ymin1)/(pt2-pt3))*100;
[ymax1,pmax1]=max(y1(1500:1600));
sobrs4_1=((ymax1-pt4)/(pt4-pt3))*100;
[ymax2,pmax2]=max(y2(1:200));
sobrs1_2=((ymax2-pt1)/pt1)*100;
[ymax2,pmax2]=max(y2(500:600));
sobrs2_2=((ymax2-pt2)/(pt2-pt1))*100;
[ymin2,pmin2]=min(y2(1000:1100));
sobrs3_2=((pt3-ymin2)/(pt2-pt3))*100;
[ymax2,pmax2]=max(y2(1500:1600));
sobrs4_2=((ymax2-pt4)/(pt4-pt3))*100;
ja=0;jb=0;jc=0;jd=0;
for tj=11:Ni;
if y1(tj-10:tj)<=tol1p(1) & y1(tj-10:tj)>=tol1n(1);
ja=ja+1;
ts1_1(ja)=(tj-10)/100;
elseif y1(tj-10:tj)<=tol2p(6) & y1(tj-10:tj)>=tol2n(6);
jb=jb+1;
ts2_1(jb)=(tj-10)/100-5;
elseif y1(tj-10:tj)<=tol3p(11) & y1(tj-10:tj)>=tol3n(11);
jc=jc+1;
ts3_1(jc)=(tj-10)/100-10;
elseif y1(tj-10:tj)<=tol4p(16) & y1(tj-10:tj)>=tol4n(16);
jd=jd+1;
ts4_1(jd)=(tj-10)/100-15;
end
end
ja=0;jb=0;jc=0;jd=0;
for tj=11:Ni;
if y2(tj-10:tj)<=tol1p(1) & y2(tj-10:tj)>=tol1n(1);
ja=ja+1;
ts1_2(ja)=(tj-10)/100;
elseif y2(tj-10:tj)<=tol2p(6) & y2(tj-10:tj)>=tol2n(6);
jb=jb+1;
ts2_2(jb)=(tj-10)/100-5;
elseif y2(tj-10:tj)<=tol3p(11) & y2(tj-10:tj)>=tol3n(11);
jc=jc+1;
ts3_2(jc)=(tj-10)/100-10;
elseif y2(tj-10:tj)<=tol4p(16) & y2(tj-10:tj)>=tol4n(16);
jd=jd+1;
ts4_2(jd)=(tj-10)/100-15;
end
%Linhas de tolerância no plano XZ para traj. degraus
inter=100; %intervalo de amostragem para geração do círculo
for tl=1:inter;
voltas=1; %número de voltas
it=voltas/inter; %intervalo de amostragem
alfa=it*2*pi; %período de amostragem em radiano
wrpt1_cos(tl)=pt1+pt1*.2*cos(alfa*(tl));
wrpt1_sen(tl)=pt1+pt1*.2*sin(alfa*(tl));
203
wrpt2_cos(tl)=pt2+abs(pt2-pt1)*.2*cos(alfa*(tl));
wrpt2_sen(tl)=pt2+abs(pt2-pt1)*.2*sin(alfa*(tl));
wrpt3_cos(tl)=pt3+abs(pt3-pt2)*.2*cos(alfa*(tl));
wrpt3_sen(tl)=pt3+abs(pt3-pt2)*.2*sin(alfa*(tl));
wrpt4_cos(tl)=pt4+abs(pt4-pt3)*.2*cos(alfa*(tl));
wrpt4_sen(tl)=pt4+abs(pt4-pt3)*.2*sin(alfa*(tl));
end
end
%--------------------------------------------------------elseif traj==3;
%Linhas de tolerância no plano XZ para traj. circular
for tl=1:Ni;
wrp_cos(tl)=0.153*cos(alfa*(tl));
wrp_sen(tl)=0.153*sin(alfa*(tl));
wrn_cos(tl)=0.147*cos(alfa*(tl));
wrn_sen(tl)=0.147*sin(alfa*(tl));
end
%--------------------------------------------------------end
%Trajetória de referência
figure(1)
plot(tt,wr1(t),'k','LineWidth',2)
if traj==1;
axis([-1 Ni/100+1 0 pt2+0.05]);
elseif traj==2;
axis([0 Ni/100 0 0.2]);
elseif traj==3;
axis([0 Ni/100 -0.2 0.2]);
end
xlabel('Tempo (s)');
ylabel('Posição da extremidade do atuador (m)');
grid on
axis square
if traj==3;
figure(2)
plot(tt,wr2(t),'k','LineWidth',2)
axis([0 Ni/100 -0.2 0.2]);
xlabel('Tempo (s)');
ylabel('Posição da extremidade do atuador no eixo "Z"(m)');
grid on
axis square
figure(3)
plot(wr1(t),wr2(t),'k','LineWidth',2)
axis([-0.2 0.2 -0.2 0.2]);
xlabel('Posição da carga "M2" no eixo "X"(m)');
ylabel('Posição da carga "M2" no eixo "Z"(m)');
grid on
axis square
end
204
%Evolução dos parâmetros do pistão 1
figure(11)
plot(tt,a1_1(t),'r',tt,a2_1(t),'b',...
tt,b1_1(t),'g',tt,b2_1(t),'k','LineWidth',2)
grid on
legend('a1','a2','b1','b2');
xlabel('Tempo (s)');
ylabel('Evolução dos parâmetros para o pistão 1');
%Pistão 1 seguindo a trajetória de referência
figure(12)
hold on
plot(tt,wr1(t),'g','LineWidth',3)
plot(tt,yest_1(t),'r',tt,y1(t),'k','LineWidth',2)
if traj==1; %Para trajetória em degraus
%Representação do sobre-sinal e tolerância para cada patamar
plot(ii1,ss1p(ii1),'b:',i1,tol1p(i1),'b--',...
ii1,ss1n(ii1),'b:',i1,tol1n(i1),'b--','LineWidth',2)
plot(ii2,ss2p(ii2),'b:',i2,tol2p(i2),'b--',...
ii2,ss2n(ii2),'b:',i2,tol2n(i2),'b--','LineWidth',2)
plot(ii3,ss3p(ii3),'b:',i3,tol3p(i3),'b--',...
ii3,ss3n(ii3),'b:',i3,tol3n(i3),'b--','LineWidth',2)
plot(ii4,ss4p(ii4),'b:',i4,tol4p(i4),'b--',...
ii4,ss4n(ii4),'b:',i4,tol4n(i4),'b--','LineWidth',2)
axis([-1 Ni/100+1 0 pt2+0.05]);
legend('trajetória de referência','saída estimada',...
'saída do sistema','sobre-sinal 20%','tolerância 2%',0);
%acréscimo de textos no gráfico (sobressinal e tempo de acomodação)
texto1=['Mp=' num2str(sobrs1_1) '%'];text(2,.08,texto1);
texto2=['Mp=' num2str(sobrs2_1) '%'];text(6,.245,texto2);
texto3=['Mp=' num2str(sobrs3_1) '%'];text(12,.025,texto3);
texto4=['Mp=' num2str(sobrs4_1) '%'];text(16,.125,texto4);
texto5=['t_s=' num2str(ts1_1(1)) 's'];text(2,.065,texto5);
texto6=['t_s=' num2str(ts2_1(1)) 's'];text(6,.23,texto6);
texto7=['t_s=' num2str(ts3_1(1)) 's'];text(12,.01,texto7);
texto8=['t_s=' num2str(ts4_1(1)) 's'];text(16,.11,texto8);
elseif traj==2; %Para trajetória cúbica
acomod2p(v)=.15*1.02;%tolerância de +2%
acomod2n(v)=.15*0.98;%tolerância de -2%
plot(vv,acomod2p(v),'b--',vv,acomod2n(v),'b--','LineWidth',2)
axis([0 Ni/100 0 0.2]);
legend('trajetória de referência','saída estimada',...
'saída do sistema','tolerância 2%',0);
elseif traj==3; %Para trajetória circular
axis([0 Ni/100 -0.2 0.2]);
legend('trajetória de referência','saída estimada',...
'saída do sistema',0);
end
xlabel('Tempo (s)');
ylabel('Posição da carga M2 no eixo "X" (m)');
grid on
axis square
hold off
205
%Análise do pistão 1 ao seguir a trajetória de referência
%Erro entre saída do real do pistão 1 e a referência
figure(13)
plot(tt,esai1(t),'k','LineWidth',2)
axis([0 Ni/100 -0.018 0.018]);
if traj==1;axis([0 Ni/100 -0.2 0.2]);end
xlabel('Tempo (s)');
ylabel('Erro de posição da carga M2 no eixo "X"(m)');
grid on
%Deslocamento do carretel da válvula_1 no eixo X (u1)
figure(14)
limite(v)=1.2e-3;
plot(tt,u1(t),'k',vv,limite(v),'b--',vv,-limite(v),'b--','LineWidth',2)
legend('variável de controle - u_1(k)',...
'limites da variável de controle',0);
if traj==2|traj==3; axis([0 Ni/100 -1.5e-3 1.5e-3]); end
xlabel('Tempo (s)');
ylabel('Variável de controle 1 (m)');
grid on
%Evolução dos parâmetros do pistão 2
figure(21)
plot(tt,a1_2(t),'r',tt,a2_2(t),'b',...
tt,b1_2(t),'g',tt,b2_2(t),'k','LineWidth',2)
grid on
legend('a1','a2','b1','b2');
xlabel('Tempo (s)');
ylabel('Evolução dos parâmetros para o pistão 2');
%Pistão 2 seguindo a trajetória de referência
figure(22)
hold on
plot(tt,wr2(t),'g','LineWidth',3)
plot(tt,yest_2(t),'r',tt,y2(t),'k','LineWidth',2)
if traj==1;
%Representação do sobre-sinal e tolerância para cada patamar
plot(ii1,ss1p(ii1),'b:',i1,tol1p(i1),'b--',...
ii1,ss1n(ii1),'b:',i1,tol1n(i1),'b--','LineWidth',2)
plot(ii2,ss2p(ii2),'b:',i2,tol2p(i2),'b--',...
ii2,ss2n(ii2),'b:',i2,tol2n(i2),'b--','LineWidth',2)
plot(ii3,ss3p(ii3),'b:',i3,tol3p(i3),'b--',...
ii3,ss3n(ii3),'b:',i3,tol3n(i3),'b--','LineWidth',2)
plot(ii4,ss4p(ii4),'b:',i4,tol4p(i4),'b--',...
ii4,ss4n(ii4),'b:',i4,tol4n(i4),'b--','LineWidth',2)
axis([-1 Ni/100+1 0 pt2+0.05]);
legend('trajetória de referência','saída estimada',...
'saída do sistema','sobre-sinal 20%','tolerância 2%',0);
%acréscimo de textos no gráfico (sobressinal e tempo de acomodação)
texto1=['Mp=' num2str(sobrs1_2) '%'];text(2,.08,texto1);
texto2=['Mp=' num2str(sobrs2_2) '%'];text(6,.245,texto2);
texto3=['Mp=' num2str(sobrs3_2) '%'];text(12,.025,texto3);
texto4=['Mp=' num2str(sobrs4_2) '%'];text(16,.125,texto4);
texto5=['t_s=' num2str(ts1_2(1)) 's'];text(2,.065,texto5);
texto6=['t_s=' num2str(ts2_2(1)) 's'];text(6,.23,texto6);
texto7=['t_s=' num2str(ts3_2(1)) 's'];text(12,.01,texto7);
texto8=['t_s=' num2str(ts4_2(1)) 's'];text(16,.11,texto8);
206
elseif traj==2;
acomod2p(v)=.15*1.02;%tolerância de +2%
acomod2n(v)=.15*0.98;%tolerância de -2%
hold on
plot(vv,acomod2p(v),'b--',vv,acomod2n(v),'b--','LineWidth',2)
axis([0 Ni/100 0 0.2]);
legend('trajetória de referência','saída estimada',...
'saída do sistema','tolerância 2%',0);
elseif traj==3;
axis([0 Ni/100 -0.2 0.2]);
legend('trajetória de referência','saída estimada',...
'saída do sistema',0);
end
xlabel('Tempo (s)');
ylabel('Posição da carga M2 no eixo "Z" (m)');
hold off
axis square
grid on
%Análise do pistão 2 ao seguir a trajetória de referência
%Erro entre saída do real do pistão 2 e a referência
figure(23)
plot(tt,esai2(t),'k','LineWidth',2)
axis([0 Ni/100 -0.018 0.018]);
if traj==1;axis([0 Ni/100 -0.2 0.2]);end
xlabel('Tempo (s)');
ylabel('Erro de posição da carga M2 no eixo "Z"(m)');
grid on
%Deslocamento do carretel da válvula_2 no eixo X (u2)
figure(24)
limite(v)=1.2e-3;
plot(tt,u2(t),'k',vv,limite(v),'b--',vv,-limite(v),'b--','LineWidth',2)
legend('variável de controle - u_2(k)',...
'limites da variável de controle',0);
if traj==2|traj==3; axis([0 Ni/100 -1.5e-3 1.5e-3]); end
xlabel('Tempo (s)');
ylabel('Variável de controle 2 (m)');
grid on
if traj==3;
figure(30)
hold on
plot(wr1(t),wr2(t),'g','LineWidth',3)
plot(y1(t),y2(t),'k','LineWidth',2)
plot(wrp_cos(t),wrp_sen(t),'b--','LineWidth',2)
plot(wrn_cos(t),wrn_sen(t),'b--','LineWidth',2)
ylabel('Posição da carga M2 no eixo "Z" (m)');
xlabel('Posição da carga M2 no eixo "X" (m)');
legend('referência','saída do sistema','tolerância de 2%',0);
axis([-0.2 0.2 -0.2 0.2]);
end
grid on
axis square
hold off
Baixar