1
UNIVERSIDADE FEDERAL RURAL DO RIO DE JANEIRO
INSTITUTO DE TECNOLOGIA
CURSO DE GRADUAÇÃO EM ENGENHARIA DE AGRIMENSURA
PROJETO FINAL DE CURSO
DETERMINAÇÃO DO DESVIO DA VERTICAL INTEGRANDO
OBSERVAÇÕES DE POSICIONAMENTO POR SATÉLITES E
TOPOGRAFIA
JÉSSICA CAROLINE DOS SANTOS SIQUEIRA
SEROPÉDICA
2013
2
UNIVERSIDADE FEDERAL RURAL DO RIO DE JANEIRO
INSTITUTO DE TECNOLOGIA
CURSO DE GRADUAÇÃO EM ENGENHARIA DE AGRIMENSURA
DETERMINAÇÃO DO DESVIO DA VERTICAL INTEGRANDO
OBSERVAÇÕES DE POSICIONAMENTO POR SATÉLITES E
TOPOGRAFIA
JÉSSICA CAROLINE DOS SANTOS SIQUEIRA
Sob Orientação do Professor
Luiz Guimarães Barbosa
Monografia apresentada à disciplina IT 195Projeto de Agrimensura como requisito
parcial a conclusão do Curso de Engenharia
de Agrimensura da Universidade Federal
Rural do Rio de Janeiro.
SEROPÉDICA
2013
3
DEDICATÓRIA
À Deus, minha mãe Jane Roseny, minha irmã
Janaina, ao meu namorado Rodrigo Navega, ao
meu afilhado Luiz Felipe, ao meu cunhado José
Sérgio, e aos professores João Gonçalves Bahia e
Luiz Guimarães Barbosa por sempre me darem
força, me incentivar e vibrar com minhas
conquistas e me apoiar nas dificuldades. A todos
vocês o meu muito obrigado.
4
AGRADECIMENTOS
Primeiramente a Deus pelas vitórias alcançadas até hoje e pelas que virão, por me
dar força em todas as dificuldades e angustias vividas. Por ser meu tudo e nunca me deixar
em nenhum momento. O meu muito obrigada pela vida e por mais esse sonho realizado.
À minha mãe por ser minha mãe, mulher forte guerreira e que sempre me ensinou
que por mais que as coisas pareçam difíceis, temos que acreditar e nunca deixar de lutar.
Se hoje cheguei até aqui foi porque você sempre esteve ao meu lado me incentivando da
melhor maneira.
À Janaina por ser mais que uma irmã, ser um exemplo a se seguir. Obrigada por
sempre acreditar em mim, mesmo quando eu mesma já tinha deixado e a me incentivar em
todos os momentos difíceis. E pelo presente mais lindo recebido até hoje, meu sobrinho e
afilhado Luiz Felipe, a este agradeço por me fazer esquecer o mundo ao redor quando estou
ao seu lado.
A Rodrigo Navega, mais que um namorado, um amigo, irmão, companheiro. Você
sempre me apoiou incondicionalmente e nunca me deixou esquecer a simplicidade e
ingenuidade que podemos viver a vida. Agradeço pelos sorrisos em momentos difíceis,
pelas palavras e pela felicidade que me proporciona sempre.
Ao meu professor de matemática do ensino fundamental Jorge, mesmo sem nada
em troca foi uma das peças fundamentais para eu ter chegado hoje aqui, obrigada onde
quer que o senhor esteja. Ao professor Renato Aquino da UFRRJ pela paciência e apoio
sempre.
No mundo Deus sempre coloca pessoas especiais para nos ajudar, incentivar,
apoiar, ensinar, ouvir, dar conselhos e dar broncas quando necessário. Fui privilegiada em
ter conhecido e convivido com vocês professores Luiz Guimarães e João Gonçalves Bahia.
Vocês são mais que professores, são exemplos a seguir, amigos que pretendo levar para
toda a vida, o meu muito obrigada de coração. Ao professor Bahia, obrigada também por me
mostrar verdadeiramente a importância de um amigo e pela total disposição em me ajudar.
Ao meu orientador, Luiz Guimarães Barbosa pelo incentivo, dedicação, paciência e
ideias desafiadoras.
A empresa SOLUGEO por me emprestar os equipamentos utilizados nesta pesquisa.
Aos meus amigos e todos aqueles que se fizeram presentes em minha vida durante toda a
graduação me estimulando a sempre buscar mais.
5
RESUMO
Os
levantamentos
geodésicos
oriundos
de
observações
de
satélites
são
referenciados a um sistema global e estão vinculados a normal ao elipsóide, entretanto os
mesmos são realizados sob a superfície física, sendo esta relacionada com a vertical ao
geóide. Adicionalmente se tornou rotineira a utilização de técnicas de posicionamento por
satélites para apoiar levantamentos topográficos. Diante do exposto surge a necessidade de
compatibilização entre os sistemas, uma vez que as superfícies envolvidas nos dois casos
denominadas de elipsóide e geóide respectivamente, normalmente não são coincidentes e
nem paralelas. A relação geométrica entre esses dois sistemas é obtida através do
conhecimento do valor do desvio da vertical e da ondulação geoidal, sendo a determinação
do desvio da vertical a parcela que apresenta maior dificuldade em sua mensuração, pois os
métodos convencionais para tal utilizam laboriosas e caras observações astronômicas. O
objetivo desta pesquisa é apresentar metodologias alternativas na determinação do valor do
desvio da vertical empregando observáveis da topografia clássicas e do sistema de
posicionamento por satélites. A solução parcial de Procrustes através de uma matriz rotação
relaciona o sistema global com o local, tendo como parâmetros a latitude e a longitude
astronômica, assim como uma orientação horizontal desconhecida. Outra metodologia
possui como incógnitas as componentes do desvio da vertical, componente meridiana e
primeiro vertical e uma orientação horizontal desconhecida e é solucionada considerando a
relação entre pontos pertencentes tanto ao sistema geodésico local como no astronômico
local através do MMQ empregando o modelo paramétrico. A última metodologia,
denominada de Helmert considera que o desvio da vertical poderá ser obtido a partir do
conhecimento das altitudes geométricas e ortométricas dos pontos, assim como a distancia
espacial entre os mesmos. Sua solução também é baseada pelo MMQ empregando o
modelo paramétrico. Para a rede de teste localizada no Campus da UFRRJ, foi obtido um
desvio da vertical de 6,48” no ponto origem com a metodologia de Helmert e de 9,82” com o
método que utiliza o MMQ. Estas metodologias foram validadas considerando o valor da
ondulação geoidal obtida com dados fornecidos pelo IBGE e o calculado com o valor do
desvio encontrado, posteriormente seus resultados foram comparados com as tolerâncias
estabelecidas na NBR-13133. A metodologia de Helmert apresentou melhores resultados
para as componentes do desvio da vertical. Os dois métodos se apresentaram como
promissoras alternativas na determinação do desvio da vertical empregando técnicas
usualmente utilizadas no cotidiano para mensuração.
Palavras-chave: Desvio da Vertical, Problema parcial de Procrustes, Método de
Helmert, MMQ.
6
ABSTRACT
The geodetics surveys arising from satellites observations are referenced to a system
global and are attached to normal to the ellipsoid, however they are performed beneath
physical surface, being this referenced with the vertical to the geoid. Additionally became
routine the use of techniques positioning for satellites to support surveys topographic. Given
the above emerge the need of compatibility among the systems, once the surfaces involved
at the two cases called of ellipsoid and geoid, respectively, normally aren't coincident nor
parallels. The geometric nexus among those two systems is obtained through of knowing of
value deviation of the vertical and of the geoid undulation, being determining the deviation of
the vertical the portion that exhibit the bigger dificulty in their mensuration, because the
conventional methods use laborious and expensive astronomical observations. The object
this research is introduce methodologies alternatives in the determination of the value
deviation of the vertical, using observables of classical topography and of the satellites
positioning system. The Partial Procrustes solution through an rotation matrix relates the
global system with the local, having as parameters the astronomical latitude and longitude,
even as an orientation horizontal unknown. Another methodology has as unknowns the
components of deviation of the vertical, component meridian and first vertical and a
horizontal orientation unknown and is resolved considering the relationship between points
belonging both to local geodetic system as in astronomical local, through the MMQ
employing the parametric model. The last methodology, named of Helmert consider that the
deviation of the vertical can be obtained from of the knowledge of the heights geometric and
orthometric of the points, even as the space distance between are the same. Your solution
also is based at MMQ employing the parametric model. To test network located in the
campus of the UFRRJ, was obtained a deviation of the vertical of 6,48" at point of origin with
the methodology of Helmert and of 9,82" with the method that uses the MMQ. These
methodology were validate considering the value of the geoid undulation obtained with data
provided by IBGE and the calculated on the value of deviation of the vertical found, after their
results were compared with the established tolerances in NBR-13133. The methodology of
Helmert exhibit better results to components deviation of the vertical. The two methods if
presented as promising alternatives in determination of the deviation of the vertical
employing techniques commonly used in everyday life to mensuration.
Keywords: Deviation of the vertical, Partial Procrustes solution, Method of the Helmert,
Method of least squares (MMQ).
7
LISTA DE FIGURAS
Figura 1 - Sistema de Coordenadas Cartesianas Associado ao Sistema Global. ..... 16
Figura 2 - Sistema de Coordenadas Cartesianas e Esféricas ................................... 17
Figura 3 - Sistema de Coordenadas Geodésicas. ..................................................... 19
Figura 4 - Coordenadas cartesianas tridimensionais. ............................................... 20
Figura 5 - Sistema Topocêntrico ............................................................................... 23
Figura 6 - Sistema de Coordenadas Astronômicas ................................................... 25
Figura 7 - Observações terrestres A, Z e s ̅ no sistema astronômico local x, y, z. .... 27
Figura 8 - Ondulação geoidal .................................................................................... 28
Figura 9 - Desvio da Vertical ..................................................................................... 29
Figura 10 - Relacionamento entre sistema global e sistema astronômico local ........ 34
Figura 11 - Sistemas SGL e SAL, com seus respectivos vetores posição, tendo
como origem o ponto O ............................................................................................. 40
Figura 12 - Relação geométrica entre o SAL e o SGL. ............................................. 41
Figura 13 – Rotação 1............................................................................................. 42
Figura 14 - Figura 14 – Rotação 2 .......................................................................... 42
Figura 15 – Rotação 3............................................................................................. 43
Figura 16 - Determinação do desvio da vertical pelo método de Helmert. ................ 46
Figura 17 - Nivelamento Trigonométrico ................................................................... 49
Figura 18 - localização da rede com a distribuição geométrica dos pilares utilizados.
.................................................................................................................................. 51
Figura 19 - Ilustração gráfica da primeira etapa do levantamento............................. 54
Figura 20 - Ilustração gráfica da segunda etapa do levantamento. ........................... 54
Figura 21 - Cálculo das coordenadas relativas ......................................................... 56
Figura 22 - Vetores GPS da rede. ............................................................................. 57
8
LISTA DE TABELAS
Tabela 1 - Distâncias a partir do pilar 91775 ............................................................. 51
Tabela 2 - Coordenadas relativas e incertezas das direções da rede de teste. ........ 66
Tabela 3 - Coordenadas cartesianas tridimensionais dos pontos da rede. ............... 67
Tabela 4 - Coordenadas geodésicas, altitudes geométricas e respectivas incertezas
dos pontos da rede.................................................................................................... 67
Tabela 5 - Azimute geodésico das direções dos pontos da rede. ............................. 68
Tabela 6 - Ângulos verticais e distâncias inclinadas com suas respectivas incertezas.
.................................................................................................................................. 68
Tabela 7 - Somatório dos resíduos com diferentes matrizes peso no ajustamento .. 69
Tabela 8 - Teste qui-quadrado do ajustamento do modelo de Helmert para obtenção
do desvio da vertical. ................................................................................................. 69
Tabela 9 - Desvio da vertical e suas componentes ................................................... 70
Tabela 10 - Validação do resultado obtido com o modelo de Helmert. ..................... 70
Tabela 11 - Coordenadas topocêntricas ................................................................... 71
Tabela 12 - Teste qui-quadrado do ajustamento do modelo para obtenção do desvio
da vertical. ................................................................................................................. 72
Tabela 13 - Desvio da vertical e suas componentes ................................................. 72
Tabela 14 - Validação do resultado obtido com o modelo. ........................................ 72
9
LISTA DE ABREVIATURAS E SIGLAS
ARP
Antenna Reference Point
CCD
Charge Couple Device
GNSS
Global Navigation Satellite System
GPS
Global Positioning System
IBGE
Instituto Brasileiro de Geografia e Estatística
LPS
Local Positioning System
MMQ
Método dos Mínimos Quadrados
SAL
Sistema Astronômico Local
SGB
Sistema Geodésico Brasileiro
SGL
Sistema Geodésico Local
SVD
Decomposição em Valores Singulares
UFRRJ
Universidade Federal Rural do Rio de Janeiro
WGS84
World Geodetic System1984
10
Sumário
1. INTRODUÇÃO ................................................................................................... 12
1.1. JUSTIFICATIVA ........................................................................................... 14
1.2. OBJETIVO ................................................................................................... 14
1.3. OBJETIVO ESPECÍFICO ............................................................................. 15
2. REVISÃO BIBLIOGRÁFICA .............................................................................. 15
2.1. SISTEMA DE REFERÊNCIA GLOBAL ........................................................ 15
2.2. SISTEMAS DE COORDENADAS ESFÉRICAS ........................................... 17
2.3. MODELOS TERRESTRES .......................................................................... 18
2.4. COORDENADAS GEODÉSICAS E CARTESIANAS TRIDIMENSIONAIS .. 18
2.5. TRANSFORMAÇÃO DE COORDENADAS GEODÉSICAS PARA
COORDENADAS CARTESIANAS TRIDIMENSIONAIS E VICE-VERSA .............. 20
2.6. SISTEMA GEODÉSICO LOCAL (SGL) OU TOPOCÊNTRICO ................... 22
2.7. TRANSFORMAÇÃO DE COORDENADAS ENTRE O SISTEMA
GEOCÊNTRICO E O SISTEMA GEODÉSICO LOCAL ......................................... 23
2.8. SISTEMA DE COORDENADAS ASTRONÔMICAS..................................... 25
2.9. SISTEMA ASTRONÔMICO LOCAL OU SISTEMA TOPOGRÁFICO .......... 26
2.10.
ONDULAÇÃO GEOIDAL .......................................................................... 27
2.11.
REDUÇÕES A SEREM APLICADAS NAS MEDIDAS DE ÂNGULOS ..... 28
2.11.1.
DESVIO DA VERTICAL ......................................................................... 29
2.11.1.1.
MÉTODO ASTRO-GEODÉSICO DE DETERMINAÇÃO DO DESVIO
DA VERTICAL ....................................................................................................... 31
2.11.1.2.
DETERMINAÇÃO DO DESVIO DA VERTICAL ATRAVÉS DE
MEDIDAS GPS/LPS UTILIZANDO OS FUNDAMENTOS DO PROBLEMA
PROCRUSTES SIMPLES ..................................................................................... 32
2.11.1.3.
DETERMINAÇÃO DO DESVIO DA VERTICAL EMPREGANDO
OBSERVÁVEIS DA TOPOGRAFIA CLÁSSICA E DO POSICIONAMENTO POR
SATÉLITES ATRAVÉS DO MODELO PARAMÉTRICO. ....................................... 39
2.11.1.4.
DETERMINAÇÃO DO DESVIO DA VERTICAL EMPREGANDO O
MÉTODO DE HELMERT ....................................................................................... 45
2.12. AJUSTAMENTO PELO MÉTODO DE MÍNIMOS QUADRADOS – MMQ
ATRAVÉS DO MODELO PARAMÉTRICO ............................................................ 47
2.13.
NIVELAMENTO TRIGONOMÉTRICO ...................................................... 49
3. MATERIAIS E MÉTODOS.................................................................................. 50
11
3.1. REDE DE PONTOS ..................................................................................... 50
3.2. EQUIPAMENTOS UTILIZADOS .................................................................. 52
3.3. SOFTWARES UTILIZADOS ........................................................................ 52
3.4. METODOLOGIA .......................................................................................... 53
3.4.1.
LEVANTAMENTO TOPOGRÁFICO E PROCESSAMENTO .................... 53
3.4.2. DETERMINAÇÃO DAS COORDENADAS ATRAVÉS DE
POSICIONAMENTO POR SATÉLITES ................................................................. 57
3.4.3.
APLICAÇÃO DO MÉTODO DE HELMERT .............................................. 58
3.4.4. DETERMINAÇÃO DO DESVIO DA VERTICAL APLICANDO O MMQ EM
PONTOS NO SGL E SAL ...................................................................................... 59
3.4.5.
ANÁLISE DO AJUSTAMENTO ................................................................. 62
3.4.6.
APLICAÇÃO DO MODELO DO MÉTODO DE PROCRUSTES ................ 63
3.4.7.
VALIDAÇÃO DOS MÉTODOS.................................................................. 64
4. RESULTADOS E DISCUSSÕES ....................................................................... 66
4.1. COORDENADAS TOPOGRÁFICAS ............................................................ 66
4.2. COORDENADAS ORIUNDA DO POSICIONAMENTO POR SATÉLITES... 67
4.3. DESVIO DA VERTICAL PELO MÉTODO DE HELMERT ............................ 67
4.4. DESVIO DA VERTICAL PELO MMQ COM PONTOS NO SGL E SAL ........ 71
4.5. DESVIO DA VERTICAL PELO MÉTODO DE PROCRUSTES .................... 73
5. CONCLUSÕES E RECOMENDAÇÕES............................................................. 73
6. REFERÊNCIAS BIBLIOGRÁFICAS .................................................................. 75
7. ANEXO DIGITAL ................................................................................................ 78
12
1. INTRODUÇÃO
A Geodésia e a Topografia têm como uma das tarefas a determinação da
posição de um ou mais pontos sobre a superfície da Terra (ANDRADE, 2008).
Sendo que a topografia trabalha com um sistema local e a geodésia com um sistema
global. No posicionamento por satélites as coordenadas obtidas são as cartesianas
tridimensionais geocêntricas, podendo estas ser transformadas para latitude (Φ),
longitude (λ) e altitude geométrica (h) quando referenciadas a um elipsóide de
revolução. Adicionalmente as coordenadas obtidas em um sistema local são as
coordenadas cartesianas retangulares que traduz a posição de um ponto em relação
a um ponto de referência sobre a superfície física terrestre (ANDRADE, 2008),
podendo este também ser representado por coordenadas esféricas (ângulo
horizontal, ângulo vertical e distância ou raio).
Devido
às
irregularidades
da
superfície física
da Terra
e
a
sua
descontinuidade a modelagem precisa da mesma matematicamente se torna difícil,
logo se utiliza um elipsóide achatado nos pólos como figura matemática que mais se
aproxima da superfície terrestre (ANDRADE, 2008).
Sob a força da gravidade encontram-se todos os corpos vinculados a Terra,
esta é a resultante da força de atração gravitacional e da força centrífuga decorrente
do movimento de rotação (ANDRADE, 2008). O modelo matemático que melhor
representaria a Terra se fosse possível ser modelada seria o geóide, este é uma
superfície equipotencial do campo gravitacional que mais se aproxima do nível
médio dos mares não perturbado (ELOI e SILVA, 2010).
As observações nos levantamentos geodésicos são efetuadas na superfície
física da Terra, entretanto para realização de cálculos e avaliação de medições é
adotado o modelo elipsoidal definido pelo elipsóide de revolução e o geoide
estabelecido pela superfície equipotencial do campo da gravidade da Terra (SOUZA
e GARNÉS, 2012). Contudo tais superfícies, geralmente, não são coincidentes e
nem paralelas ocasionando uma separação entre si denominada ondulação geoidal
e uma inclinação conhecida como desvio da vertical (SOUZA e GARNÉS, 2012). A
vertical de um ponto é a reta tangente à linha de força nesse ponto que representa a
direção do vetor gravidade e a normal é a linha perpendicular à superfície
geodésica.
13
Tanto o desvio da vertical, ângulo formado entre a normal e a vertical em um
ponto e a ondulação geoidal estabelece a relação geométrica entre um sistema de
referencia global, onde o elipsoide é o modelo de superfície adotado e um sistema
de referencia local, estando este relacionado com a direção da vertical (ANDRADE,
2008).
A determinação do desvio da vertical em um ponto qualquer tradicionalmente
é obtida através da integração de observações astronômicas de estrelas e
geodésicas advindas da utilização da técnica GPS. A obtenção das coordenadas
astronômicas pelo método tradicional segundo Awange (2003) é cansativa e
dispendiosa, logo uma alternativa para a determinação dessas coordenadas é a
utilização integrada das técnicas GPS (Sistema de Posicionamento Global) e LPS
(Sistema de Posicionamento Local). Segundo Awange (2003), Granfarend através
da associação destas duas técnicas resolve o problema de orientação tridimensional
de forma única.
No problema de orientação tridimensional a determinação das coordenadas
astronômicas, sendo estas referenciadas a vertical do ponto é obtida através de
observações do tipo ângulo horizontal, ângulo vertical e distancias espaciais
referenciadas ao Sistema de Posicionamento Local. E as coordenadas cartesianas
tridimensionais são conseguidas via observações de satélites (AWANGE, 2003).
Conforme Awange (2003), procedimentos anteriores para resolver o problema
de orientação tridimensional estavam em princípio baseados na interação e
posteriormente atualizados para procedimentos que parametriza os dados
desconhecidos sem linearização.
Além da solução do desvio da vertical pelo problema parcial de Procrustes,
existem outras metodologias aplicadas para tal finalidade e que também utilizam
dados provenientes do sistema de posicionamento por satélites e topografia
clássica, como o caso similar ao de Procustes apresentado por Andrade (2008),
onde são realizados os cálculos relacionando observações no sistema topocêntrico
e topográfico, e o método de Helmert que tem como princípio que o desvio da
vertical pode ser determinado a partir da diferença entre os ângulos zenitais
geodésicos e astronômicos em uma dada direção, estando ambos localizados na
superfície terrestre (SOUZA e GARNÉS, 2012).
14
1.1.
JUSTIFICATIVA
Segundo Medeiros1 et al (1998) apud Andrade (2008), “relacionar coordenadas
entre os sistemas de referência físicos e geométricos é uma necessidade prática
atual. As metodologias atuais que não consideram o desvio da vertical como
parâmetro de transformação causam prejuízo na ordem do milímetro ou superior nas
coordenadas transformadas, não aproveitando todo o potencial tecnológico hoje
disponível e piorando a qualidade das coordenadas originais.”
Os métodos convencionais de determinação de desvio da vertical são
trabalhosos ou caros, pois envolvem observações astronômicas, geodésicas ou a
partir de câmeras digitais zenitais. A utilização de uma metodologia em que fosse
possível o relacionamento entre o sistema global e o topográfico de forma direta e
sem a necessidade das laboriosas observações astronômicas se torna uma
alternativa promissora a um aumento na utilização das correções a serem aplicadas
às medidas dos ângulos, fato este tão importante quando se integra técnicas de
posicionamento por satélites e topográficas simultaneamente.
Atualmente os profissionais utilizam-se de técnicas de posicionamento por
satélites para apoiar seus levantamentos topográficos, entretanto na maioria das
vezes o devido cuidado na compatibilização entre os diferentes sistemas adotados
não é considerado, ocasionando um aumento de erros sistemáticos nos valores das
coordenadas finais de seus trabalhos. Neste contexto, este estudo propõe uma
alternativa para determinação do desvio da vertical a partir do emprego de técnicas
posicionamento por satélites e topográficas usualmente utilizadas.
1.2.
OBJETIVO
O objetivo desta pesquisa é estabelecer os procedimentos necessários para
determinar os elementos fundamentais no cálculo do desvio da vertical. Neste
estudo serão apresentadas e aplicadas na prática três técnicas para determinação
do mesmo.
1
MEDEIROS, Z. F.; FREITAS, S. R. C.; MORAES, C. V. Discussão do Projeto de Normatização da
Rede Cadastral Municipal. Anais Congresso Brasileiro de Cadastro Técnico Multifinalitário
COBRAC1998. Florianópolis. 1998.
15
1.3.
OBJETIVO ESPECÍFICO
Com base no objetivo geral proposto apresentam-se como objetivos específicos
deste trabalho:
•
Quantificar a correção devida ao desvio da vertical a ser aplicada às
medidas de ângulos;
•
Aplicar metodologias para determinação do desvio da vertical empregando
observações advindas de topografia clássica, ângulos, distancias e
desníveis em vez de observações astronômicas, assim como a utilização
de observações realizadas através de satélites, empregando a técnica
GPS.
2. REVISÃO BIBLIOGRÁFICA
2.1.
SISTEMA DE REFERÊNCIA GLOBAL
Os sistemas de referência possuem importância quando se deseja determinar
espacialmente a posição de pontos. Um referencial ideal é aquele cuja origem esteja
em repouso ou em movimento retilíneo uniforme, conforme a mecânica clássica de
Newton. A aceleração sobre o movimento de translação ao redor do sol é o motivo
pelo qual os sistemas terrestres cuja origem sejam no geocentro se apresente como
sistemas quase-inerciais, contudo estes sistemas ainda são os mais adequados
para descrever a trajetória de satélites próximos a Terra (ANDRADE, 2008).
Um sistema de referência global é aquele cuja origem seja definida como
geocêntrica, caso contrário, se a origem não é geocêntrica e o mesmo for obtido por
orientação topocêntrica em um ponto DATUM o sistema será regional ou local
(COSTA2, 1999 apud ZANETTI, 2006).
2
COSTA, S.M.A. Integração da Rede Geodésica Brasileira aos Sistemas de Referência
Terrestres. Curitiba. 156 p. Tese (Doutorado em Ciências Geodésicas). Curso de Pós-Graduação em
Ciências Geodésicas. Universidade Federal do Paraná. 1999.
16
Um sistema de coordenadas espaciais X, Y, Z, geocêntrico e fixo a Terra é um
sistema de coordenadas cartesianas associado a um sistema global qualquer,
podendo ser caracterizado por (ZANETTI, 2006):
•
Origem no geocentro (O), centro de massa da Terra, incluindo hidrosfera e
atmosfera;
•
Eixo Z direcionado para o Pólo Norte terrestre médio;
•
Plano equatorial médio perpendicular ao eixo Z e que contém os eixos X e
Y;
•
Plano XZ gerado pelo plano que contém o meridiano médio de Greenwich
(Gr), obtido pelo eixo de rotação médio e pelo meridiano origem de
Greenwich (referência do Tempo Universal);
•
Eixo Y que torna o sistema dextrógiro.
Segundo Zanetti (2006), este sistema utiliza o eixo de rotação médio e o
plano equatorial médio, devido às alterações no movimento de rotação da Terra. A
Figura 1 ilustra um sistema de coordenadas cartesianas associado ao sistema
global.
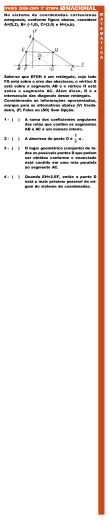
Figura 1 - Sistema de Coordenadas Cartesianas Associado ao Sistema Global.
Fonte: ZANETTI, 2006.
17
2.2.
SISTEMAS DE COORDENADAS ESFÉRICAS
A determinação de forma unívoca de um ponto do espaço tridimensional através
do vetor posição entre a origem do sistema e o ponto R considerado, é obtida por
meio do ângulo β formado entre o segmento e a projeção ortogonal deste sobre
o plano xy e pelo ângulo α formado pela projeção do segmento sobre o plano xy
com o semi-eixo OX (ZANETTI, 2006). A Figura 2 apresenta o sistema de
coordenadas esféricas e cartesianas, e mostra como são dadas as coordenadas
esféricas de um ponto R.
Figura 2 - Sistema de Coordenadas Cartesianas e Esféricas
Fonte: ZANETTI, 2006.
Na Figura 2 supõe-se o sistema de coordenadas esféricas sobreposto a um
sistema de coordenadas cartesianas. Com base nesta suposição temos que o ponto
R determinado pelo terno cartesiano (x, y, z) poderá ser expresso pelas
coordenadas esféricas (, α, β), sendo o relacionamento entre os dois sistemas
obtidos pela igualdade (ZANETTI, 2006):
cos cos
= = sin cos sin
(01)
18
2.3.
MODELOS TERRESTRES
Devido à descontinuidade e irregularidade da superfície física da Terra, a mesma
não pode ser definida matematicamente com exatidão (COOPER3, 1987 apud
ANDRADE, 2008). O elipsóide de revolução com seu eixo menor coincidente com o
eixo de rotação da Terra é a aproximação matemática da superfície física da Terra.
Existem dezenas de elipsóides de revolução adotados pela comunidade para as
atividades de geodésia e cartografia (ANDRADE, 2008). Os parâmetros de definição
do elipsóide poderão ser o raio equatorial a e o raio polar b, assim como os
derivados destes como o achatamento f, a primeira excentricidade e a segunda
excentricidade , FILHO (2009).
Existem outras características sobre os elipsóides de revolução, como o fato de
qualquer reta perpendicular ao modelo elipsoidal que passa por um ponto é
denominado de “Reta Normal” ou “Normal” do ponto, e que passando por qualquer
elipsóide existem duas seções principais denominadas, seção do primeiro vertical e
seção meridiana, (ANDRADE, 2008).
A seção meridiana é gerada pelo plano
normal de um ponto e passa pelos dois pólos, assim como a seção do primeiro
vertical também é gerada pelo plano normal de um ponto, contudo esta é
perpendicular ao plano do meridiano (FILHO, 2009).
2.4.
COORDENADAS GEODÉSICAS E CARTESIANAS TRIDIMENSIONAIS
As coordenadas geodésicas latitude (Φ), longitude (λ) e altitude geométrica (h)
são definidas sobre um elipsóide de revolução, adotado como modelo matemático
da Terra. As mesmas permitem descrever a posição de um ponto sobre o modelo
geométrico, o elipsóide (GEMAEL4, 2004 apud ANDRADE, 2008).
A latitude geodésica ou elipsóidica Φ de um ponto P pode ser definida como o
ângulo entre a normal ao elipsóide que passa por P e o plano equatorial elipsóidico,
de tal modo que a longitude geodésica λ do mesmo ponto P considerado é o ângulo
formado entre o eixo e a projeção sobre o plano equatorial, da normal ao elipsóide
3
COOPER, M. A. R. Control surveys in civil engineering. 1 ed. London Collins, 1987.
4
GEMAEL, C.; ANDRADE, J. B. Geodésica Celeste. 1 ed. Curitiba: Ed. UFPR, 2004.
19
nesse ponto (ZANETTI, 2006). Contudo para definição de um ponto sobre a
superfície física da Terra em relação ao elipsóide é necessário o conhecimento de
uma terceira coordenada, a altitude geométrica (h), sendo esta a distância medida
sobre a normal entre o ponto na superfície física da Terra e a superfície do elipsóide.
A Figura 3 ilustra as coordenadas geodésicas ou elipsóidicas.
Figura 3 - Sistema de Coordenadas Geodésicas.
Fonte: Adaptado, ZANETTI (2006).
As coordenadas cartesianas tridimensionais X, Y e Z também permitem
descrever a posição de um ponto (ANDRADE, 2008). Esse sistema é definido no
elipsóide de revolução e possui sua origem coincidente com o centro do mesmo, o
eixo ̅ coincide com o eixo de rotação do elipsóide, o eixo situa-se na interseção
do plano equatorial do elipsóide com o plano do meridiano de Greenwich e o eixo !
é escolhido de forma a tornar o sistema dextrógiro (ZANETTI, 2006). A Figura 4
apresenta os elementos que caracterizam este sistema e as coordenadas para um
ponto P situado na superfície terrestre.
20
Figura 4 - Coordenadas cartesianas tridimensionais.
Fonte: ANDRADE, 2008.
2.5.
TRANSFORMAÇÃO DE COORDENADAS GEODÉSICAS PARA
COORDENADAS CARTESIANAS TRIDIMENSIONAIS E VICE-VERSA
Muitas das vezes existe a necessidade de transformar coordenadas geodésicas
em cartesianas tridimensionais e vice-versa. Essas transformações são realizadas
com diversas finalidades, tais como: transformação de coordenadas em diferentes
sistemas, atualização de coordenadas entre outras aplicações na geodésia.
A equação 02 apresenta o modelo matemático extraído do IBGE (1989) utilizado
para transformar coordenadas geodésicas em cartesianas.
$ + ℎ. cos( . cos)
"! # = $ + ℎ. cos( . sin) *$. 1 + + + ℎ,. sin(
(02)
+ = 28 − 8 +
(04)
$=
./0 1 .234 51 6/1
(03)
21
Onde,
X, Y, Z – coordenadas cartesianas tridimensionais;
N - representado na equação 03 é o raio da seção primeiro vertical;
+ - representada pela equação 04 é a primeira excentricidade;
Φ – latitude geodésica do ponto
λ – longitude geodésica do ponto
h – altitude geométrica
a – semi-eixo equatorial do elipsóide de revolução
f – achatamento do elipsóide
A transformação inversa de coordenadas cartesianas para geodésicas possuem
dois tipos de soluções, uma solução direta e uma interativa (ZANETTI, 2007). Será
aqui apresentado o método direto, conforme formulário do IBGE (1989).
A equação 05 exibe o cálculo da longitude geodésica, adicionalmente com a
equação 06 calcula-se a latitude geodésica em função das coordenadas cartesianas
geocêntricas, da primeira e segunda excentricidade, dos semi-eixos do elipsóide de
referência e da grandeza u.
) = tan/. < ?
>
=
(05)
( = tan/. @√> 1
1
ABC0 D E .F.234 GH
B= 1 / 0 1 .-.234 GH
J
(06)
A grandeza angular u é calculada através das Equações 07, 08 e 09. Segundo
Andrade (2008) a partir destas equações é possível analisar o quadrante desta
grandeza.
tanK = <√> 1
cosK =
A
B= 1
.
? . <F ?
L.BMN4 G1 -
(07)
(08)
22
sinK =
MN4G
L.BMN4 G1 (09)
A última coordenada geodésica a ser calculada é a altitude geométrica (Equação
10), esta se encontra em função das coordenadas cartesianas geocêntricas, da
latitude geodésica e do raio da seção do primeiro vertical ou também denominado de
“Grande Normal”.
ℎ=
√> 1 B= 1
OP25
2.6.
−$
(10)
SISTEMA GEODÉSICO LOCAL (SGL) OU TOPOCÊNTRICO
Segundo Rodrigues (2002), o sistema geodésico local é semelhante ao sistema
topográfico e por este motivo também é denominado de sistema topocêntrico. O
mesmo possui grande aplicação no desenvolvimento de modelos matemáticos que
integram observações por satélites e terrestres. Este sistema de coordenadas possui
origem na superfície terrestre em um ponto “O”; eixo u coincide com a normal ao
elipsóide, dirigido para o zênite, eixo n na direção da tangente ao meridiano
geodésico, dirigido para o norte e eixo e perpendicular a u e n, tornando o sistema
dextrógiro. O horizonte geodésico é definido pelos eixos e e n (RODRIGUES, 2002).
A Figura 5 mostra as coordenadas geodésicas com origem “O” do sistema
((Q , )Q ℎQ ) e a sobreposição do sistema geodésico local em um sistema
geocêntrico.
23
Figura 5 - Sistema Topocêntrico
Fonte: Andrade, 2008
A posição do ponto P neste sistema pode ser representada pelas coordenadas
cartesianas e, n e u.
2.7.
TRANSFORMAÇÃO DE COORDENADAS ENTRE
GEOCÊNTRICO E O SISTEMA GEODÉSICO LOCAL
O
SISTEMA
A expressão matemática que expressa a relação entre as coordenadas
cartesianas S , !S S , em um sistema geocêntrico e S , TS KS , num sistema
topocêntrico com origem em um ponto com coordenadas geodésicas (Q , )Q e ℎQ ,
referentes ao elipsóide associado aos sistemas cartesianos é (ANDRADE, 2008):
S − Q
S
"TS # = . 90º − (Q . X 90º + )Q . !S − !Q KS
S − Q
(11)
24
Onde
Q , !Q Q , são coordenadas cartesianas associadas ao elipsóide de revolução, do
ponto de origem do sistema topocêntrico.
S , !S S , são coordenadas cartesianas associadas ao elipsóide de revolução, do
ponto P.
(Q )Q , são as coordenadas geodésicas do ponto de origem do sistema
topocêntrico.
. X , são as matrizes rotação em torno dois eixos X e Z respectivamente, do
sistema cartesiano transladado até o ponto O.
As matrizes de rotação são transformações geométricas que permitem
interligar sistemas de referencias (ANDRADE, 2008). As equações 12 e 13
apresentam respectivamente as matrizes . X .
1
0
. 90º − (Q = "0 cos90º − (Q 0 − sin90º − (Q 0
sin90º − (Q #
cos90º − (Q cos90º + )Q sin90º + )Q 0
X 90º + )Q = "− sin90º + )Q cos90º + )Q 0#
0
0
1
(12)
(13)
Ao se efetuar a multiplicação das matrizes . X e desenvolvendo a equação (11)
tem-se:
S − Q
S
cos)Q 0
− sin)Q T
" S # = − sin(Q cos)Q − sin(Q sin)Q cos(Q . !S − !Q KS
cos(Q sin)Q sin(Q S − Q
cos(Q cos)Q (14)
S − Q
T = . !S − !Q K
S − Q
(15)
Cuja notação pode ser simplificada para:
25
onde
cos)Q 0
− sin)Q = − sin(Q cos)Q − sin(Q sin)Q cos(Q cos(Q sin)Q sin(Q cos(Q cos)Q 2.8.
(16)
SISTEMA DE COORDENADAS ASTRONÔMICAS
As coordenadas astronômicas são a latitude astronômica ϕ e a longitude
astronômica Λ. A latitude astronômica é o ângulo formado pela vertical do ponto com
sua projeção equatorial. Por convenção a latitude é positiva no hemisfério norte e
negativa no hemisfério sul.
A longitude astronômica é o ângulo diedro formado pelo meridiano astronômico
do ponto com o meridiano origem de Greenwich.
Uma característica do plano do meridiano astronômico do ponto é que o mesmo
contém a vertical que passa pelo ponto e uma linha paralela ao eixo de rotação, pois
a vertical e o eixo de rotação não são co-planares (ZANETTI, 2006). A Figura 6
ilustra as coordenadas astronômicas de um ponto P qualquer.
Figura 6 - Sistema de Coordenadas Astronômicas
Fonte: Zanetti, 2006
26
2.9.
SISTEMA ASTRONÔMICO LOCAL OU SISTEMA TOPOGRÁFICO
As observações quando referenciadas a um sistema astronômico local estão
relacionadas com a direção da vertical no ponto de observação e consequentemente
ao campo da gravidade terrestre. Tais observações são do tipo azimute
astronômico, distancias, ângulos e direções horizontais, ângulos verticais e diferença
de altura (ZANETTI, 2006).
Segundo Andrade (2008), “o sistema cartesiano tridimensional denominado
Sistema Astronômico Local é o sistema das observações terrestre, comumente
tratado como Sistema Topográfico pelo fato das observações da topografia clássica
serem as próprias observações terrestres.”
O sistema topográfico é um sistema levógiro, com o eixo x orientado para o norte
e o eixo y para leste, possui origem em um ponto P na superfície física, seu eixo z
coincide com a direção da vertical local com sentido positivo na direção do zênite, o
eixo x é perpendicular ao eixo z e está contido no plano do meridiano astronômico
do ponto P, e por fim seu eixo y é perpendicular aos eixos x e z e é contado
positivamente para o leste astronômico (TORGE5, 2001 apud ZANETTI, 2006).
A Figura 7 apresenta as coordenadas polares de um ponto P, observáveis da
topografia em um sistema astronômico local.
5
TORGE, W. Geodesy. Berlin, New York: Walter de Gruyter, 2001. 416 p.
27
Figura 7 - Observações terrestres A, Z e s ̅ no sistema astronômico local x, y, z.
Fonte: Zanetti, 2006
A distância zenital ou ângulo zenital (Z) é o ângulo formado entre o zênite (eixo z)
e a linha que une P a Y. . O azimute astronômico (A) é o ângulo formado no plano
horizontal definido pelos eixos x e y (plano do horizonte), entre o meridiano do ponto
P e a projeção da vertical do ponto Y. sobre o referido plano. Este é contado no
sentido horário a partir do eixo X. A distância espacial Z̅ representa o comprimento
entre P e Y. .
Considerando a Figura 07 o vetor posição entre P e Y. pode ser obtido pela
equação 17 (ZANETTI, 2006):
cos[ . sin
Z = = Z sin[ . sin cos
(17)
2.10. ONDULAÇÃO GEOIDAL
Segundo Andrade (2008) o geóide é uma superfície equipotencial do campo da
gravidade, sendo o mesmo o geope que mais se aproxima do nível médio dos
mares. Considerando a Figura (08), um ponto P sobre o geóide é projetado ao longo
28
da normal sobre o elipsóide resultando no ponto Y . A distância YY ao longo da
normal é denominada “ondulação geoidal” ou “altura geoidal”, e é obtido pela
equação (18). Observa-se que quando a altitude geométrica (h) é maior que a
altitude ortométrica (H), ou seja, quando o geóide está acima do elipsóide o valor de
N é positivo (ANDRADE, 2008). A Figura 8 ilustra um ponto P sobre o geóide e a
respectiva ondulação geoidal no mesmo.
$ =ℎ−\
(18)
Figura 8 - Ondulação geoidal
Fonte: Adaptado de Andrade, 2008
2.11. REDUÇÕES A SEREM APLICADAS NAS MEDIDAS DE ÂNGULOS
O transporte de ângulos e distâncias medidas na superfície da Terra para seus
correspondentes valores na superfície de referencia, que normalmente é o elipsóide
de revolução é denominado em Geodésia de redução (ZAKATOV6, 1981 apud
ZANETTI, 2006). Segundo Zanetti (2006), o problema de redução será mais
complexo na medida em que a superfície terrestre se afasta da superfície de
referencia. Quanto mais próximas e paralelas forem às mesmas, menor será a
6
ZAKATOV, P.S. Curso de Geodesia Superior. Tradução do original russo de 1976. Rússia:
Editorial Mir, 1981. 635 p.
29
diferença entre os valores medidos na superfície terrestre e de referencia, tornando
assim as reduções de menor valor e complexidade.
As reduções poderão ser aplicadas nas medidas de distancias e ângulos,
contudo neste trabalho serão apenas abordadas as relativas às medidas angulares.
As principais reduções a serem aplicadas nos ângulos mensurados sobre a
superfície terrestre são as devidas à convergência meridiana e ao desvio da vertical
(ZANETTI, 2006).
A convergência meridiana (ϒ) é a diferença angular existente entre o norte
verdadeiro ou geográfico (NV) e o norte da quadrícula (NQ), (CORRÊA, 2012). E o
desvio da vertical é o ângulo formado entre a normal ao elipsóide e a vertical local
passante pelo ponto. Devido o objetivo do trabalho, somente o desvio da vertical
será abordado mais detalhadamente.
2.11.1.
DESVIO DA VERTICAL
A inclinação do geóide em relação ao elipsóide de referencia é mensurada
através do desvio da vertical ou também conhecido por deflexão da vertical,
(GEMAEL7, 2002 apud SOUZA e GARNÉS, 2012). A Figura 9 apresenta o desvio da
vertical, a normal e a vertical em um ponto e as superfícies de referencia.
Figura 9 - Desvio da Vertical
Fonte: Zanetti, 2006
7
GEMAEL,C., 2002. Introdução à Geodésia Física. 2ª Ed. UFPR – Editora, 302pp.
30
A necessidade de determinação do desvio da vertical se dá pelo fato dos
cálculos geodésicos para obtenção de coordenadas dos vértices serem sobre o
elipsóide, e as observações executadas com um aparelho colocado em uma estação
se referir à direção da vertical astronômica (ZANETTI, 2006).
O desvio da vertical pode ser decomposto em duas componentes, a meridiana ξ
e a componente do primeiro vertical η, tendo a direção vertical definida pelas
coordenadas astronômicas, latitude ϕ e longitude Λ (ANDRADE, 2008).
Segundo Featherstone e Rueger8 (2000) apud Zanetti (2006), o desvio da vertical
possui seis utilizações principais em levantamentos de campo, são elas:
•
Transformação entre coordenadas astronômicas em geodésicas;
•
Transformação de azimutes astronômicos em azimutes geodésicos;
•
Redução de direções horizontais e ângulos medidos ao elipsóide;
•
Redução de ângulos zenitais medidos ao elipsóide;
•
Redução de distâncias inclinadas medidas eletronicamente ao elipsóide,
através de ângulos zenitais;
•
Determinação de diferenças de altura a partir de ângulos zenitais e
distâncias inclinadas.
São usualmente aplicados cinco métodos de determinação do desvio da vertical
segundo Zanetti (2006), são eles:
•
Método astro-geodésico, onde as componentes do desvio da vertical são
determinadas através de coordenadas geodésicas e astronômicas em um
mesmo ponto;
•
Método através de câmera zenital digital, onde neste sistema é utilizado
moderna tecnologia CCD para visualização de estrelas integrado com um
receptor GPS, permitindo a determinação do desvio da vertical através de
um processo totalmente automatizado e em tempo-real (HIRT9, C. e
BURKI, B., 2006 apud ZANETTI, 2006).
8
FEATHERSTONE, W.E.; RÜEGER, J. M. The Importance of Using Deviations of the Vertical for the
Reduction of Survey Data to a Geocentric Datum. The Australian Surveyor, vol. 45, n.2, p. 46-61.
dec 2000.
9
HIRT,C.; BÜRKI, B. Status of Geodetic Astronomy at the beginning of the 21st Century. In:
Wissenschainftliche Arbeitende Fachrichtung Geodäsie und Geoinformatik de Universtät Hannover
Nr258. Ed. C. Hirt, pp. 81- 100, 2006.
31
•
Gravimétrico, onde o desvio da vertical é obtido em função de anomalias
da gravidade, utilizando-se a fórmula de Venning-Meinesz (GEMAEL10,
2000).
•
Astro-gravimétrico, que conjuga determinações astro-geodésicas com
gravimétricas (GEMAEL, 2000).
•
Método através de medidas GPS/LPS, neste é utilizado para o cálculo o
Problema de Procrustes simples (GRAFAREND11 e AWANGE, 2000).
Em Andrade (2008) o mesmo apresenta outra forma de determinação do desvio
da vertical, com metodologia similar ao apresentado por Procrustes. Neste caso a
partir da relação geométrica entre os sistemas geodésico local e o astronômico local
é obtido um modelo funcional que os interligam, tendo como incógnitas a
componente meridiana, a componente do primeiro vertical e uma diferença angular
horizontal plana.
A determinação do desvio da vertical também pode ser obtida através do
emprego da metodologia de Helmert, neste considera-se que o desvio da vertical
pode ser calculado a partir da diferença entre os ângulos zenitais geodésicos e
astronômicos em uma dada direção, estando os pontos localizados na superfície
terrestre (SOUZA e GARNÉS, 2012).
A diante apenas serão detalhados os métodos de determinação do desvio da
vertical pelo método astro-geodésico, de Procrustes, com a metodologia de Andrade
(2008) e por fim a de Helmert.
2.11.1.1. MÉTODO ASTRO-GEODÉSICO DE DETERMINAÇÃO DO DESVIO
DA VERTICAL
Segundo Andrade (2008) as coordenadas astronômicas se relacionam com as
coordenadas geodésicas pelas componentes sobre as seções normais principais,
conforme as equações 19 e 20. A equação 21 apresenta o cálculo do desvio da
vertical com base nas componentes.
10
11
GEMAEL, C. Geodésia Física. 1. Ed. Curitiba: Editora UFPR. 2000
GRAFAREND, E.W.; AWANGE, J.L. Determination of vertical deflections by GPS/LPS
Measurements. Zfv. v.8, 2000. p. 279-288.
32
] = ^−(
_ = ` − ). cos(
a = L_+ + ] + (19)
(20)
(21)
Tem-se em (19), (20) e (21) que:
ξ = componente meridiana
η = componente 1º vertical
Φ = latitude geodésica
ϕ = latitude astronômica
Λ = longitude astronômica
λ = longitude geodésica
2.11.1.2. DETERMINAÇÃO DO DESVIO DA VERTICAL ATRAVÉS DE
MEDIDAS GPS/LPS UTILIZANDO OS FUNDAMENTOS DO
PROBLEMA PROCRUSTES SIMPLES
Inicialmente consideram-se duas configurações distintas que representam o
mesmo conjunto de objetos, entretanto obtidos por meio de dois diferentes métodos.
Segundo Filho (2003), a análise Geral de Procrustes dilata, translada, espelha e
rotaciona uma das configurações para que os pontos se ajustem, da melhor maneira
possível, à outra, permitindo a comparação dos resultados. O algoritmo parcial de
Procrustes ou o Problema de Procrustes simples consiste na simplificação da
análise geral de Procrustes e refere-se a uma rotação ideal (AWANGE, 2003).
Segundo Zanetti (2006), o problema de orientação tridimensional é a
determinação da matriz de rotação (3x3) cujas incógnitas são a longitude
astronômica, a latitude astronômica e a orientação horizontal no plano horizontal. O
problema de Procrustes simples é utilizado para se obter o relacionamento entre
latitude e longitude astronômica e geodésica, e a partir deste determinar as
componentes do desvio da vertical.
As coordenadas utilizadas na aplicação deste método encontram-se tanto no
sistema astronômico local, como no sistema global geocêntrico. Estas coordenadas
podem ser obtidas a partir de medidas de direções horizontais, verticais e distâncias
obtidas através de teodolitos e/ou estações totais e medidas de posicionamento por
33
satélites respectivamente. Para solução mínima do Problema de Procrustes é
necessário uma estação a qual se deseja determinar o desvio da vertical e pelo
menos três alvos (ZANETTI, 2006).
As coordenadas cartesianas (X, Y e Z) da estação base e as (b , !b b dos
alvos quando referenciadas a um Sistema Global, fixo ao centro de massa da Terra,
formam um conjunto de vetores denominados de [c. , c+ cX ,, e são obtidas a partir
de levantamento GNSS. Adicionalmente, coordenadas obtidas por um levantamento
realizado com estação total, proporciona a partir de coordenadas esféricas,
coordenadas cartesianas que formam um conjunto de vetores [c.∗ , c+∗ cX∗ , fixos à
superfície física da Terra (ZANETTI, 2006).
A equação 22 ilustra o relacionamento entre o conjunto de vetores (V)
formado por coordenadas no sistema global e (c∗) formado por coordenadas no
sistema astronômico local. As matrizes X Λ, + < + − ϕ? X Ʃ representam as
f
rotações sofridas pelo sistema cartesiano global para se ajustar ao sistema
astronômico local, as mesmas são exibidas nas equações 23, 24 e 25
respectivamente. A Figura 10 ilustra como ocorre o relacionamento entre os dois
sistemas de coordenadas envolvidos.
*c.∗ , c+∗ cX∗ , = *c. , c+ cX ,. i X Λ, i + < − ϕ? i X Ʃ
+
cosΛ sinΛ 0
X Λ = j− sinΛ cosΛ 0k
0
0
1
cos <+ − ϕ? 0
f
+ < − ϕ? = l
0
1
+
f
sin <+ − ϕ? 0
f
cosƩ sinƩ 0
Ʃ
= "− sinƩ cosƩ 0#
X
0
0
1
f
(22)
(23)
− sin <+ − ϕ?
m
0
f
cos <+ − ϕ?
f
(24)
(25)
34
Figura 10 - Relacionamento entre sistema global e sistema astronômico local
Fonte: Adaptado Zanetti (2006)
Segundo Awange (2003), a transformação de coordenadas esféricas
referenciadas ao sistema astronômico local para coordenadas cartesianas poderão
ser obtidas com a equação 26. As equações 27 e 28 representam respectivamente:
cálculo da distância espacial entre a estação base e a estação alvo e a fórmula geral
para determinação do Problema de Procrustes Parcial.
b − cosob . cospb nb . cosob . sinpb = "b − # ∀b ∈ t1,2, … , Tv
b − q
sinob ∗
q
(26)
∗
Tem-se que ob representa a direção vertical e pb a direção horizontal, tendo
sido ambas mensuradas.
nb = n. , b = Lb − + + !b − !+ + b − +
b − b − −
`,
" b
# = w .
^, Ʃ. " !b − ! #
b − q
b − q
∗
(27)
(28)
35
Expandindo a equação 28 para n vetores, tem-se que a matriz H das
equações 29 e 30 representa os vetores de coordenadas no sistema astronômico
local, R a matriz rotação em função de *`, ^, Ʃ, e B a matriz dos vetores de
coordenadas no sistema global. Finalmente tem-se a relação:
Equação 29:
. − \ ∶= " . − . − Equação 30:
. − + − \ ∶= l ⋮
y − + − … y − . − + − … y − # = . " !. − !
+ − … y − q
. − ∗
. − + − ⋮
y − . − . − + − + − ⋮ m = l ⋮
y − q
y − ∗
+ − … y − !+ − ! … !y − ! # ∶= . o
+ − … y − q
!. − !
!+ − !
⋮
!y − !
. − + − m . i ∶= o. p
⋮
y − q
\ ∈ y{X , o ∈ y{X , i = p ∈ X{X
Segundo Awange (2003) o Problema de Procrustes está preocupado com a
montagem da configuração de B em H tão próximo quanto possível. E que o caso
mais simples de Procrustes é aquele em que ambas as configurações têm a mesma
dimensionalidade e o mesmo número de pontos e podem ser trazidos para uma
correspondência um para um por considerações. Neste trabalho considera-se o
problema reduzido na determinação da matriz rotação T e que H e B pertencem ao
espaço y{X (Equação 31).
\ = o. p
(31)
Segundo Lawson (1997), uma solução de T que resolve a equação \ = o. p e
minimiza a norma ‖\ − o. p‖+ é obtida pelo método dos mínimos quadrados. Ou
seja, procura-se uma matriz T pertencente ao espaço R³ tal que ‖\ − o. p‖+ seja
mínimo.
A transformação de T que irá minimizar a soma dos quadrados da norma
‖\ − o. p‖+ é procurada usando o Problema Parcial de Procrustes. Para alcançar tal
objetivo considera-se a propriedade de invariância da função de rastreamento sob
36
permutação cíclica, utiliza-se a Norma de Frobenius e a Decomposição por valores
singulares (SVD) (AWANGE, 2003).
A norma Frobenius da uma matriz * − !. p, qualquer é definida pela
equação 32:
‖ − !. p‖ ∶= L} i − p i . ! i − !p
(32)
A simplificação de p i . p = ~ é alcançada através da consideração da
propriedade de invariância da função sob permutação cíclica (AWANGE, 2003).
Seguindo a sequência matemática exibida em Awange (2003), a equação 33
consiste na utilização da norma Frobenius em ‖\ − o. p‖+ , e a equação 34
apresenta a minimização da função obtida após aplicação de Frobenius. Os termos
}\ i . \ e }o i . o não são dependentes de T, logo não são considerados. No entanto
o único termo considerado }\ i . op na equação 34 é dependente de T, (AWANGE,
2003).
‖\ − o. p‖+ ∶= }\ i − p i . o i \ − o. p
(33)
min = }\ i . \ − 2. \ i . o. p + p i . o i . o. p
(34)
pi. p = ~
O mínimo da função (34) considerando que apenas o termo }\ i . op é
dependente de T, segundo Awange (2003) terá a seguinte forma (Equação 35).
‖\ − o. p‖+ = min ↔ }\ i . o. p =
(35)
Minimizada a norma ‖\ − o. p‖+ , o passo seguinte consisti em empregar a
decomposição por valores singulares (SVD) na determinação da matriz T. Segundo
Zuben (2013), a SVD vale tanto para matrizes quadradas quanto retangulares.
Uma definição para SVD é apresentada em Lawson (1997): “A SVD de A é
uma decomposição . . Ʃ. +i , onde Q1 e Q2 são matrizes ortogonais de tamanhos m
por m e n por n, respectivamente, e Ʃ é uma matriz diagonal de tamanho m por n.
Os elementos diagonais não nulos de Ʃ chamam-se os valores singulares de A.”
37
Outra propriedade da SVD exibida em Zuben (2013) de significativa
importância no calculo da matriz rotação T é que as colunas de . são autovetores
de [. [i e as colunas de + são os autovetores de [i . [.
Prosseguindo na sequência de cálculos apresentada em Awange (2003) para
determinação da matriz T, temos que a equação 36 ilustra que . . Ʃ. +i , é a
decomposição em valores singulares de \ i . o. Segundo Awange (2003) a
abordagem de Mathar12 (1997 p.34) é utilizada para determinar os valores da matriz
T e encontra-se apresentada pelas equações 37, 38, 39, 40 e 41 a seguir:
\ i . o = . . Ʃ. +i , ., +i ϵ SO(3)
}\ i . o. p = }. . Ʃ. +i . p = }Ʃ. +i . p. . = a1 ≤ a, ≤ = +i . Ʃ. . }T |bb | ≤ 1
(36)
(37)
(38)
Então
}Ʃ. +i . p. . = ∑b. b . bb ≤ ∑b. b
(39)
A partir de (38)
}\ i . \. p = max ↔ }\ i . \. p ≤ ∑b. b
(40)
Finalmente, o máximo valor:
}\ i . \. p = ∑b. b ↔ p = + . .i
(41)
A equação 42 ilustra a solução da matriz rotação obtida através do Problema
de Procrustes parcial:
p = + . .i
12
MATHAR, R. (1997): Multidimensionale Skalierung, B
(42)
38
Existe um método diferente do exposto de se obter a solução da matriz T.
Nessa metodologia o calculo de T é baseada nas derivadas parciais abordadas
segundo Awange (2003) em P.H Schõnemann13 (1996), tendo como operações
envolvidas:
•
•
Solução de p ∗ = + . .i
Obtenção dos elementos de rotação a partir de = p ∗ i
Neste método p ∗ é a melhor matriz fora do conjunto de todas as matrizes
ortogonais T, obtida através da imposição da restrição p. p i = p i . p = ~ (AWANGE,
2003).
Finalmente determinada a matriz rotação R, sendo esta apresentada em sua
forma geral pela equação 43, pode-se determinar a latitude (ϕ) e longitude (Λ)
astronômica, assim como a orientação horizontal no plano horizontal (Ʃ).
Equação (43):
=
Ʃ ϕ − Ʃ
Ʃ ϕ + Ʃ
− Ʃ ϕ
Ʃ ϕ − Ʃ ϕ − Ʃ − Ʃ ϕ + Ʃ
ϕ
ϕ
ϕ
Os valores da latitude, longitude e da orientação horizontal desconhecida
variam nos intervalos mostrados nas equações 44, 45 e 46 respectivamente. As
equações 47, 48 e 49 ilustram os cálculos para determinação dos três parâmetros
de orientação a partir da matriz R (ZANETTI, 2006).
0 ≤ ` ≤ 2
− ≤ϕ≤
+
f
f
+
0 ≤ Ʃ ≤ 2
13
(44)
(45)
(46)
SCHONEMANN, P. H. (1996): Generalised solution of the orthogonal Procrustes problem,
Psychometrika 31 Nº 1 (1996) 1-10.
39
tan` = H1 → ` = }T <H1 ?
H6
tanϕ =
(47)
H6
HH
1 B 1
H6
H1
→ ϕ = atan
HH
1 B 1
H6
H1
tanƩ = − 1H → Ʃ = }T <1H ?
6H
6H
(48)
(49)
De posse dos valores da longitude astronômica Λ, da latitude astronômica ϕ e
da orientação desconhecida Ʃ obtidas através de Procrustes, assim como da latitude
elipsóidica Φ e da longitude elipsóidica λ obtidas por meio de observações de
satélites pode-se enfim determinar a componente meridiana ξ e a componente
primeiro vertical η através das equações 19 e 20 respectivamente. Tendo calculadas
as componentes (ξ, η), a determinação do valor final para o desvio da vertical poderá
ser obtido através da equação (21).
2.11.1.3. DETERMINAÇÃO DO DESVIO DA VERTICAL EMPREGANDO
OBSERVÁVEIS
DA
TOPOGRAFIA
CLÁSSICA
E
DO
POSICIONAMENTO POR SATÉLITES ATRAVÉS DO MODELO
PARAMÉTRICO.
Neste método considera-se as coordenadas topocêntricas e topográficas como
observações, e posteriormente realiza-se o ajustamento das observações pelo MMQ
para obter os parâmetros da transformação entre os sistemas (ANDRADE, 2008).
O modelo funcional que interliga a relação geométrica entre os sistemas
geodésicos locais (SGL) e o sistema astronômico local (SAL) com seus respectivos
vetores posição assume que os dois sistemas possuem a mesma origem O e que
ambos se relacionam pelas componentes do desvio da vertical e por uma diferença
angular horizontal plana (ANDRADE, 2008). A Figura 11 ilustra o sistema geodésico
local com vetor posição dado por = *, T, K, e o sistema astronômico local com
vetor posição dado por = *, , ,.
40
Figura 11 - Sistemas SGL e SAL, com seus respectivos vetores posição, tendo como origem o
ponto O
Fonte: Andrade, 2008
Considerando uma esfera unitária sobre o ponto origem O, é possível identificar
os ângulos que relacionam os eixos do SGL e do SAL. A Figura 12 ilustra o
relacionamento entre os ângulos que os eixos dos sistemas formam entre si, a
seção meridiana e a seção do primeiro vertical (ANDRADE, 2008).
41
Figura 12 - Relação geométrica entre o SAL e o SGL.
Fonte: Andrade, 2008.
As matrizes de rotação são aplicadas nos eixos dos sistemas para realizar a
transformação geométrica. A matriz . é a rotação horária de ]Q no eixo (Figura
13). A matriz + é a rotação anti-horária de _Q no eixo (Figura 14) e a matriz X
apresenta a rotação anti-horária de ԑQ no eixo z (Figura 15) (ANDRADE, 2008).
42
Figura 13 – Rotação .
Fonte: Andrade, 2008
Figura 14 - Figura 14 – Rotação +
Fonte: Andrade, 2008
43
Figura 15 – Rotação X
Fonte: Andrade, 2008
As equações 50, 51 e 52 ilustram as matrizes de rotação . , + e X
respectivamente, as mesmas são apresentadas desta forma simplificada, pois os
ângulos ]Q e _Q são muito pequenos (ANDRADE, 2008).
. ]
1
= "0
0
0 0
1 −] #
] 1
1 0 −_
+ _ = "0 1 0 #
_ 0 1
cosԑ sinԑ 0
X ԑ = "− sinԑ cosԑ 0#
0
0
1
(50)
(51)
(52)
Segundo Andrade (2008), o modelo de transformação que atua sobre o SGL
e o faz coincidir com o SAL, pode ser escrito por:
44
= X −ԑ. + −_. . ]. (53)
Ou desenvolvendo esta equação 53, temos:
cosԑ −]. _. cosԑ + sinԑ −_. cosԑ − ]. sinԑ = − sinԑ ]. _. sinԑ + cosԑ
_. sinԑ − ]. cosԑ . T
K
_
]
1
(54)
As equações 55, 56 e 57 apresentam as coordenadas topográficas a partir
das coordenadas topocêntricas.
= cosԑ . + sinԑ . T − _. cosԑ + ]. sinԑ. K
= − sinԑ . + cosԑ . T + _. sinԑ − ]. cosԑ. K
= _. + ]. T + K
(55)
(56)
(57)
De forma similar o modelo inverso também poderá ser obtido. Para realização
da transformação do SAL para o SGL aplicam-se as seguintes rotações (ANDRADE,
2008):
•
Rotação horária de ԑ no eixo z;
•
Rotação horária de η no eixo y;
•
Rotação anti-horária de ξ no eixo x;
As equações 58 e 59 ilustram respectivamente, o modelo geral da
transformação e o modelo desenvolvido a partir das multiplicações das matrizes de
rotação.
= X −]. + _. X ԑ. cos ԑ
sin
ԑ
−
]. _. cos ԑ
T = "
K
−]. sin ԑ − _. cos ԑ
(58)
− sin ԑ
_ cos ԑ + ]. _. sin ԑ ] # . −]. cos ԑ + _. sin ԑ 1 (59)
As equações 60, 61 e 62 apresentam as coordenadas topocêntricas a partir
das coordenadas topográficas.
45
= cosԑ . − sinԑ . + _. T = sinԑ . + cosԑ . + ]. K = −]. sinԑ + _. cosԑ. + _. sinԑ − ]. cosԑ. + (60)
(61)
(62)
Segundo Andrade (2008) as equações de observações do modelo
paramétrico são as apresentadas pelas equações 60, 61 e 62 e pelas coordenadas
Δx, Δy e Δz dos pontos obtidos através da utilização de topografia clássica. A matriz
peso das observações é formada pelas variâncias conhecidas das coordenadas
topocêntricas e topográficas e o vetor dos parâmetros aproximados possui valores
nulos, pois os valores procurados para a incógnita de orientação desconhecida (ԑ) e
para as componentes do desvio da vertical (ξ, η) são bem pequenos e próximos de
zero (ANDRADE, 2008).
2.11.1.4. DETERMINAÇÃO DO DESVIO DA VERTICAL EMPREGANDO O
MÉTODO DE HELMERT
Segundo Souza e Garnés (2012), a partir da diferença entre os ângulos zenitais
geodésico (Z) e astronômico (z) da direção do ponto Q ao y , ambos sobre a
superfície terrestre é possível determinar o desvio da vertical. A equação 63
apresenta o cálculo do desvio da vertical através do método de Helmert.
a =−
(63)
Contudo segundo Heiskanen e Moritz (1967), “considerando dois pontos
separados por uma distância (s) finita, porém suficientemente pequena, em que se
admita uma variação linear da componente do desvio da vertical num ponto Q , este
pode ser obtido como a razão diferencial entre a ondulação geoidal (N) e a distância
(s), projetado no plano que contém a normal geodésica e a vertical.” A relação acima
mencionada é apresentada pela equação 64. A Figura 16 ilustra o cálculo do desvio
da vertical pelo método de Helmert.
a = − = − ¡ ¢
(64)
46
Sendo:
dN – diferencial da ondulação geoidal para dois pontos Q e y ;
ds – distância infinitesimal entre os pontos Q e y .
Figura 16 - Determinação do desvio da vertical pelo método de Helmert.
Fonte: Adaptada de Souza e Garnés (2012).
Para uma seção de azimute geodésico (θ) o desvio da vertical pode ser
determinado pela equação 65 (HEISKANEN E MORITZ14 1967 apud SOUZA E
GARNÉS 2012).
a = − ¡ = ]. cos£ + _. sin£
(65)
Na equação 66, os diferenciais da equação 65 foram substituídos pelas
diferenças entre as ondulações geoidais e a distancia entre os pontos Q e y .
− ¤¡
¤ ¥¦ ¥§
¥¦ ¥§
≈ ]. cosC£©¦ ©§ E + _. sinC£©¦ ©§ E
(66)
Podendo reescrever ª$©¦ ©§ conforme a equação (67):
14
HEISKANEN W.A. MORITZ H, Physical Geodesy. São Francisco, EUA : W.H. Freeman and
Company, 1967, 364 p.
47
Equação (67):
ª$©¦ ©§ = $«§ − $©¦ = Cℎ©§ − \©§ E − Cℎ©¦ − \©¦ E = Cℎ©§ − ℎ©¦ E − C\©§ − \©¦ E
Conforme Souza e Garnés (2012), o conhecimento do desnível entre os pontos
obtidos por posicionamento por satélites e o desnível alcançado por nivelamento
geométrico seria suficiente para o cálculo do valor da equação dN, sendo esta
independente do conhecimento da ondulação geoidal nos pontos.
Considerando i pontos irradiados a partir do ponto central (Q ), com
azimutes geodésicos (£. , £+ , £X , … , £y ) conhecidos, e denominando ¬b = cos£b ,
b = sin£b e b = − ¡ , o sistema de equações na forma matricial resulta em i equações a duas incógnitas (Equação 68) (SOUZA E GARNÉS, 2012).
.
+
l⋮m=
b
¬.
¬+
l⋮
¬b
.
+ ]
⋮ m . @_ J
b
(68)
A solução deste sistema poderá ser obtido pelo uso do método dos mínimos
quadrados, tendo como parâmetros a serem encontrados a componente meridiana
(ξ) e a componente do primeiro vertical (η) (SOUZA e GARNÉS, 2012). O cálculo
final do desvio da vertical é obtido através da equação (21).
2.12. AJUSTAMENTO PELO MÉTODO DE MÍNIMOS QUADRADOS – MMQ
ATRAVÉS DO MODELO PARAMÉTRICO
O modelo matemático básico para o ajustamento paramétrico baseia-se na
formulação das equações de observação, sendo formulada para cada observação
pelo menos uma equação (AMORIM, 2005). Para existência do ajustamento pelo
MMQ utilizando o método paramétrico é necessário que o número de observações
(n) seja maior que o número de incógnitas (u), pois se n for igual a u o sistema
apresentará solução única e não será possível a realização do ajustamento pela
inexistência de graus de liberdade. Segundo Andrade (2008) o objetivo do MMQ é
estimar o valor e a precisão para uma grandeza a partir de observações abundantes,
48
e seu princípio é adotar o valor que torne mínimo a soma dos quadrados dos
resíduos.
A seguir será apresentada uma rotina para aplicação do modelo paramétrico
com a finalidade de expor suas características e facilitar o seu emprego, extraído de
Amorim (2005). Ao longo da rotina serão definidos os termos exibidos.
1º Passo – Estudar o problema e formular as equações matemáticas para cada uma
das observações, e organizá-las na forma: ®- = ¯- .
®- – vetor (nx1) das observações ajustadas;
- – vetor (ux1) dos parâmetros ajustados.
2º Passo – Obter o vetor dos valores aproximados dos parâmetros desconhecidos
(Q).
Esses valores podem ser determinados através de um pré-calculo dos mesmos
a partir das observações não ajustadas, ou podem ser arbitrados. Caso ocorra o
último caso, o ideal é que os valores sejam o mais próximo possível dos
encontrados após o ajustamento convergir, pois isso acarretará menos interações
dentro do mesmo.
3º Passo – Encontrar a matriz dos pesos (P).
Normalmente, as observações não oferecem o mesmo grau de confiança,
contudo para homogeneizar as mesmas é atribuído um peso, tanto maior quanto
maior for a confiança nas observações (AMORIM, 2005). A matriz peso possui
dimensão (n x n).
4º Passo – Cálculo do vetor das observações aproximadas ®Q = ¯Q .
5º Passo – Cálculo do vetor diferença entre as observações brutas (®F ) e as
observações aproximadas (®Q ), através da equação:
® = ®F − ®Q
(69)
6º Passo – Encontrar a matriz das derivadas parciais A (n x u) da função F. A matriz
mencionada é formada da seguinte forma:
49
[=
°±
²
°> >>¦
(70)
7º Passo – Resolver o sistema de equações normais = [i . Y. [/. . [i . Y. ®
- representa o vetor correção dos parâmetros, após o ajustamento.
8º Passo – Encontrar os parâmetros ajustados - = Q + .
9º Passo – Encontrar os resíduos c = [. − ®.
10º Passo – Encontrar as observações ajustadas ®- = ®F + c.
Ainda dentro do ajustamento é possível calcular a matriz variância –
covariância dos parâmetros ajustados e a matriz variância e covariância das
observações ajustadas.
2.13. NIVELAMENTO TRIGONOMÉTRICO
O nivelamento trigonométrico tem como objetivo determinar a diferença de
nível entre dois pontos ou mais, utilizando observações advindas de levantamentos
topográficos, tais como: ângulo vertical, distancia inclinada, altura do aparelho e
altura do prisma ou sinal. A vantagem desta metodologia com relação ao
nivelamento geométrico é sua agilidade, pois o mesmo permite a realização de
visadas longas de uma só vez em comparação ao nivelamento geométrico. A Figura
17 apresenta um esquema de nivelamento trigonométrico entre os pontos A e B.
Figura 17 - Nivelamento Trigonométrico
Fonte: Veiga et al, 2012
50
Considerando a Figura 17, o valor da diferença de nível entre os pontos A e B
(ªℎ³´ ) pode ser obtido através da equação 71.
ªℎ³´ = ℎb − ℎ¡ + ¢b . cos
(71)
Onde:
ªℎ³´ – Desnível entre os pontos A e B sobre o terreno;
ℎb – Altura do instrumento;
ℎ¡ – Altura do prisma ou sinal;
¢b – Distância inclinada;
Z – Ângulo zenital.
3. MATERIAIS E MÉTODOS
3.1.
REDE DE PONTOS
A rede de pontos teste escolhida para realizar o levantamento topográfico e
geodésico situa-se dentro da Universidade Federal Rural do Rio de Janeiro,
município de SEROPÉDICA-RJ, nas proximidades da Prefeitura Universitária. Neste
trabalho foram selecionadas três estações geodésicas pertencentes ao SGB, cujas
numerações são: 91772, 91775 e 91776. Os outros três pilares utilizados
encontram-se ao redor do pilar nº 91775 e formam uma base angular com as três
estações mencionadas. Todos os pilares são de concreto em formato cilíndrico e
encontram-se sobre uma base quadrada. Em seu topo os mesmos possuem um
pino de centragem forçada. Os seis pilares que formam a base angular foram
escolhidos visando obter resultados onde a geometria da figura não interferisse
significativamente nos resultados, uma vez que os pilares não possuem
consideráveis discrepâncias de distância em relação ao pilar central (91775) e estão
dispostos em um raio de 360º. A Figura 18 ilustra a configuração geométrica e a
localização dos pontos da rede.
51
Figura 18 - localização da rede com a distribuição geométrica dos pilares utilizados.
A Tabela 01 apresenta as distâncias dos pilares em relação ao pilar central
(91775).
Tabela 1 - Distâncias a partir do pilar 91775
Até
Distância (metros)
91772
274,552
91776
300,151
M01
280,840
M02
264,949
M03
293,017
Os trabalhos de campo relativos ao posicionamento por satélites foram
realizados no dia 15 de Novembro de 2013. Nos referentes ao levantamento
52
topográfico foram necessários dois dias para seu término, sendo o primeiro dia 14
de Novembro e o segundo dia 25 de Novembro de 2013.
3.2.
EQUIPAMENTOS UTILIZADOS
A pesquisa contou com a utilização dos seguintes equipamentos:
•
01 receptor Topcon modelo Hiper Lite Plus L1/L2, com precisão nominal de ±
(3 mm + 1 ppm) horizontal e ± (5 mm + 1.4 ppm) vertical no modo estático.
•
01 receptor Topcon modelo Hiper L1/L2, com precisão nominal de ± (0,5 cm +
01 ppm) horizontal e ± (1 cm + 1 ppm) vertical no modo estático.
•
01 receptor Geomax modelo ZP800 L1/L2 com precisão nominal de ± (0,5
mm + 1 ppm) horizontal no modo estático.
•
01 estação total FOIF, modelo OTS680, com precisão nominal angular de ± 5”
e linear de ± (2 mm + 2 ppm).
•
03 prismas, sendo cada um com sua base nivelante.
•
Acessórios: tripé da estação total, trena e base nivelante para todos os
receptores.
3.3.
SOFTWARES UTILIZADOS
O software Topcon Tools, versão 7.5 foi empregado para realizar o
processamento dos dados de posicionamento por satélites, no entanto a versão
utilizada neste trabalho foi a demonstrativa.
O software MathCad 14.0 foi utilizado para realizar todos os procedimentos
matemáticos necessários para atingir o objetivo desta pesquisa.
O software free Adjust 6.1.0 foi empregado para calcular os azimutes geodésicos
e a distância entre os pilares utilizados na validação dos modelos.
53
3.4.
METODOLOGIA
Com o objetivo de determinar as componentes do desvio da vertical a partir de
duas metodologias distintas, fez-se necessário a divisão de todo o procedimento em
04 (quatro) fases. A primeira fase abrange o levantamento topográfico para
determinação das coordenadas relativas, a segunda consistiu no levantamento
geodésico com a finalidade de obter as coordenadas cartesianas geocêntricas
tridimensionais (X, Y e Z) e geodésicas (Φ, λ e h) dos pontos. A terceira e quarta
fase resultou na aplicação dos 03 (três) modelos para determinação dos elementos
básicos para o cálculo do desvio da vertical.
3.4.1. LEVANTAMENTO TOPOGRÁFICO E PROCESSAMENTO
No levantamento topográfico foram observados ângulos horizontais, verticais,
distancia inclinada e mensurada a altura do prisma e da estação permitindo o cálculo
das coordenadas relativas ª, ª ª entre os pontos da rede e o ponto central da
mesma.
Devido a necessidade de minimizar os erros dos dados mensurados em campo
alguns cuidados foram adotados, tais como: realização do levantamento topográfico
apenas na parte da manhã, visando evitar os efeitos de reverberação nas leituras
dos prismas; e em todos os prismas foram utilizados bases nivelantes, tendo em
vista a necessidade de materializar da melhor forma possível a vertical do ponto.
A estação total foi estacionada no pilar 91775 e orientada no pilar 91772, e da
mesma foram irradiados os outros cinco pontos da rede. O método adotado para
medir as direções, consistiu na realização de 4 séries de visada nas posições direta
e inversa da luneta para cada ponto, totalizando 32 direções horizontais e 40
verticais, tendo no final a geração de 4 ângulos horizontais e 5 ângulos verticais com
suas respectivas incertezas. Para caracterizar uma série foi necessário visar todos
os pontos na posição direta da luneta e posteriormente inverte-la e visa-los
novamente. Devido a indisponibilidade de cinco bases nivelantes para todos os
pilares utilizados, foi necessário realizar o levantamento em duas etapas, sendo na
primeira considerando os pilares 91772, M01 e M02 e na segunda adotou-se os
54
91772, 91776 e M03. A Figura 19 ilustra graficamente a primeira etapa do
levantamento com as direções e os ângulos mensurados, e a Figura 20 ilustra a
segunda etapa.
Figura 19 - Ilustração gráfica da primeira etapa do levantamento.
Figura 20 - Ilustração gráfica da segunda etapa do levantamento.
Foram mensuradas no total 48 distâncias, sendo 16 para a direção 9177591772 e 8 para as demais. Ao final obteve-se 5 distâncias com suas respectivas
incertezas.
55
A média aritmética das observações das 4 séries foi realizada para obter o
valor final do ângulo horizontal, vertical e da distância inclinada, somente no caso da
direção 91775-91772 a média aritmética dos ângulos e da distância foram
considerando 8 séries. O memorial de cálculo das incertezas dessas medidas foram
determinadas conforme mostrado no Anexo Digital.
Para o cálculo das coordenadas relativas ª, ª foi necessário obter antes o
azimute inicial da direção 9177591772 através da equação (72),
[.+ = }T <
/ 2345
/ 234µ6 .¤>61 BOP2µ6 .¤=61
?
.OP2µ
6
6 .¤>61 /23456 .234µ6 .¤=61 BOP256 .¤A61
(72)
Sendo:
). – longitude geodésica do ponto 01;
(. - latitude geodésica do ponto 01;
ª.+ , ª!.+ ª.+ - Diferença entre as coordenadas cartesianas tridimensionais
dos pontos 1 e 2.
O transporte de azimute para as outras direções foi realizado através da
equação (73).
[ = [-y¶ + [\
(73)
Onde:
[-y¶ – azimute anterior, ou seja, azimute para o ponto ré;
AH – ângulo horizontal.
A Figura 21 ilustra um esquema da forma como calculou-se as coordenadas
relativas finais ª ª de uma direção. As equações (74) e (75) apresentam
matematicamente como as mesmas foram determinadas.
56
Figura 21 - Cálculo das coordenadas relativas
ª.+ = sin[aK}.+ . ¢a.+ . sin.+ ª!.+ = cos[aK}.+ . ¢a.+ . sin.+ (74)
(75)
Os valores dos desníveis (ª) entre os pontos foram determinados utilizando o
princípio adotado no nivelamento trigonométrico. A equação 76 apresenta o cálculo
do desnível.
ª.+ = ℎb − ℎS + ¢b . cos.+ Onde:
ª.+ – diferença de nível entre os pontos 1e 2;
ℎb – altura do instrumento;
ℎS – altura do prisma;
¢b - distância inclinada;
.+ – ângulo zenital direção 12.
(76)
57
3.4.2. DETERMINAÇÃO
DAS
COORDENADAS
POSICIONAMENTO POR SATÉLITES
ATRAVÉS
DE
O método de posicionamento utilizado foi o Posicionamento Relativo Estático
com multi-estações. A base utilizada foi a estação geodésica 91775 do IBGE. A
mesma foi ocupada com um receptor da Topcon modelo Hiper Lite Plus L1/L2, no
modo estático e rastreou-se por aproximadamente 7 horas e 5 minutos, com
máscara de elevação de 15º e intervalo de gravação de 5 segundos. Para ocupação
dos outros pontos foram utilizados dois receptores, um da Topcon modelo Hiper
L1/L2 e outro da Geomax modelo ZGP800 L1/L2. O tempo médio que cada receptor
ficou rastreando os pontos foi de 2 horas, com máscara de elevação de 15º e
intervalo de gravação de 5 segundos. Todo o levantamento foi realizado no mesmo
dia, 15 de novembro de 2013. As antenas foram colocadas em uma base nivelante e
posicionadas sobre o pino de centragem forçada de cada pilar. A altura da antena foi
considerando da base do pilar até o Antenna Reference Point – ARP.
Todo o processamento foi realizado no software Topcon Tools 7.5, versão demo,
tendo como sistema de referencia terrestre WGS84 em sua realização G1150, o
ajustamento foi realizado pelo MMQ e todos os pontos apresentaram solução fixa. A
Figura 22 apresenta os vetores do levantamento.
Figura 22 - Vetores GPS da rede.
58
3.4.3. APLICAÇÃO DO MÉTODO DE HELMERT
Conhecendo as altitudes geométricas e os desníveis oriundos do levantamento
topográfico dos pontos da rede, é possível obter as componentes do desvio da
vertical através de resolução pelo MMQ de uma equação da forma = . Onde está em função dos desníveis relacionados à vertical e a normal entre os pontos e
da distancia entre eles, está relacionado com os azimutes geodésicos das
direções consideradas e por fim, é o vetor das incógnitas a serem determinadas,
sendo elas a componente meridiana e componente do primeiro vertical. Os
parâmetros a serem determinados se referem ao ponto central da rede 91775.
Nesta pesquisa para resolução do sistema da forma = pelo modelo
paramétrico foram geradas 5 equações de observações a duas incógnitas, tendo
grau de liberdade igual a 3. As equações 77, 78, 79, 80 e 81 apresentam as
equações de observação utilizadas neste modelo.
. =
+ =
X =
¾ =
À =
·¸6¹¹1 /·¸6¹¹º /¤»¸6¹¹º¼¸6¹¹1
¡̅¸6¹¹º¼¸6¹¹1
·½¦6 /·¸6¹¹º /¤»¸6¹¹º¼½¦6
(77)
¡̅¸6¹¹º¼½¦6
(78)
¡̅¸6¹¹º¼½¦1
(79)
¡̅¸6¹¹º¼¸6¹¹¿
(80)
¡̅¸6¹¹º¼½¦H
(81)
·½¦1 /·¸6¹¹º /¤»¸6¹¹º¼½¦1
·¸6¹¹¿ /·¸6¹¹º /¤»¸6¹¹º¼¸6¹¹¿
·½¦H /·¸6¹¹º /¤»¸6¹¹º¼½¦H
Os azimutes geodésicos foram determinados pelo software Topcon Tools através
do processamento e ajustamentos das observações obtidas pela tecnologia GNSS.
Os parâmetros aproximados (Q) foram calculados montando-se um sistema de
equações como demonstrado a seguir.
. = ]Q . cos£Á.ÂÂÀ/Á.ÂÂ+ + _Q . sin£Á.ÂÂÀ/Á.ÂÂ+ (82)
59
+ = ]Q . cos£Á.ÂÂÀ/ÃQ. + _Q . sin£Á.ÂÂÀ/ÃQ. (83)
Após a determinação aproximada dos valores para as componentes do desvio da
vertical, os mesmos foram utilizados no cálculo do vetor ®Q = ¯Q . A matriz das
derivadas é formada pelas derivadas parciais em relação aos parâmetros e é da
forma (Equação 84):
°6
Æ °Ç
Å°1
Å °Ç
Å°H
[ = Å °Ç
Å°É
Å °Ç
Å°º
Ä °Ç
°6
°È Ì
°1 Ë
cos£Á.ÂÂÀ/Á.ÂÂ+ sin£Á.ÂÂÀ/Á.ÂÂ+ Æ
Ì
sin£Á.ÂÂÀ/ÃQ. cos£Á.ÂÂÀ/ÃQ. Å
Ë
cos£
sin£
=
Á.ÂÂÀ/ÃQ+
Á.ÂÂÀ/ÃQ+
Å
Ë
°È Ë
°É Ë
Åcos£Á.ÂÂÀ/Á.ÂÂÍ sin£Á.ÂÂÀ/Á.ÂÂÍ Ë
°È Ë
Ä cos£Á.ÂÂÀ/ÃQX sin£Á.ÂÂÀ/ÃQX Ê
°º Ë
°È Ê
°È Ë
°H Ë
(84)
Ao final, o ajustamento fornece os valores ajustados dos parâmetros procurados
ξ e η bem como a sua respectiva matriz variância-covariância.
3.4.4. DETERMINAÇÃO DO DESVIO DA VERTICAL APLICANDO O MMQ EM
PONTOS NO SGL E SAL
O valor do desvio da vertical é determinado através da resolução da equação
genérica da forma C = R.B, utilizando o Método dos Mínimos Quadrados – MMQ. A
matriz C representa as coordenadas dos pontos no sistema geodésico local, a matriz
B são as coordenadas dos mesmos pontos, no Sistema Astronômico Local – SAL, a
matriz R é a representação da rotação geométrica sofrido por um sistema para se
adaptar ao outro, a mesma é função das componentes meridiana e do primeiro
vertical, assim como de uma orientação horizontal.
60
Para resolução do sistema pelo modelo paramétrico foram geradas 30 equações
de observações a 18 incógnitas, tendo grau de liberdade igual a 12. Os parâmetros
a serem determinados neste modelo são as componentes do desvio da vertical e a
orientação
horizontal
desconhecida,
as
quinze
coordenadas
topográficas
(ªbÎ , ªbÎ , ªbÎ ) são consideradas como parâmetros observados. As equações de
observações se dividiram em 15 relacionadas ao sistema astronômico e 15 ao
topocêntrico.
Para o desenvolvimento do método foi necessário inicialmente transformar as
coordenadas relativas cartesianas tridimensionais (ªbÎ , ª!bÎ , ªbÎ ) em topocêntricas
(bÎ , TbÎ , KbÎ ) através da equação 14, as coordenadas relativas topográficas foram
obtidas por meio das equações 74 e 75, e ao término destes procedimentos obtevese as 30 observações do modelo.
No vetor dos parâmetros aproximados (Q) adotou-se como recomendado em
Andrade (2008) os valores nulos para as componentes do desvio da vertical e para a
orientação horizontal desconhecida. As coordenadas topográficas foram às mesmas
consideradas como observações no vetor das observações (®F ).
Com base no vetor Q, nas equações de observações 60, 61, 62 e nas 85, 86 e
87 apresentadas a seguir, foi determinado o vetor das observações aproximadas
(®Q ).
ªbÎQ = ªbÎ
(85)
ªbÎQ = ªbÎ
(86)
ªbÎQ = ªbÎ
(87)
A matriz das derivadas parciais nesta pesquisa teve dimensão 30x18, as
derivadas das equações 60, 61 e 62 em relação aos parâmetros ξ, η e ԑ são
nulas, enquanto em relação aos parâmetros observados são um ou zero. As
derivadas
parciais
das
equações
das
coordenadas
topocêntricas
são
apresentadas a seguir.
°0
°Ç
=0
(88)
61
°0
°È
°0
°ԑ
= ª
= −ª. sinԑ − ª. cosԑ
°0
°¤{ÏÐ
°0
°¤ÑÏÐ
°0
°¤»ÏÐ
°y
°Ç
°y
°È
°y
°ԑ
= ª. cosԑ − ª. sinԑ
°y
°¤ÑÏÐ
°y
°¤»ÏÐ
°G
°È
°G
°ԑ
=_
=0
°¤{ÏÐ
°Ç
= − sinԑ
= ª
°y
°G
= cosԑ
= sinԑ
= cosԑ
=]
= −ª. sinԑ − ª. cosԑ
= −ª. cosԑ + ª. sinԑ
= ª. _. sinԑ − ]. cosԑ + ª. _. cosԑ + ]. sinԑ
°G
°¤{ÏÐ
°G
°¤ÑÏÐ
°G
°¤»ÏÐ
= −ξ. sinԑ − η. cosԑ
= _. sinԑ − ]. cosԑ
=1
(89)
(90)
(91)
(92)
(93)
(94)
(95)
(96)
(97)
(98)
(99)
(100)
(101)
(102)
(103)
(104)
(105)
62
Optou-se considerar a matriz Peso igual a identidade, devido a inexistência das
incertezas das coordenadas topocêntricas. Ao final do ajustamento, o mesmo
forneceu os valores dos parâmetros desconhecidos ξ, η e ԑ com suas respectivas
incertezas, e as coordenadas relativas topográficas ajustadas pelo modelo.
3.4.5. ANÁLISE DO AJUSTAMENTO
Ao término do ajustamento das observações pelo MMQ através do modelo
paramétrico é possível realizar uma análise do mesmo. O Teste Global da Variância
“a Posteriori” será aqui aplicado com a finalidade de detectar inconsistência no
ajustamento. Segundo Amorim (2005), ele também é denominado de teste do
modelo geral, pois o mesmo testa o modelo como um todo, e possui como qualidade
simplicidade de aplicação e capacidade de indicar as prováveis causas da falha da
suposição básica.
Neste teste é realizada a comparação entre a variância “a priori” e “a posteriori”.
Sendo a primeira conhecida anteriormente e relacionada com a precisão das
observações e a segunda é obtida após o ajustamento das observações, a partir da
matriz dos resíduos (AMORIM, 2005). A equação 106 apresenta o cálculo da
variância “a posteriori”.
Q+ =
q Ô .Õ.q
(106)
Sendo:
Q+ – variância “a posteriori”;
V – vetor dos resíduos;
P – matriz Peso; e
– graus de liberdade no ajustamento
A distribuição qui-quadrado Ö + é utilizada para verificar a significância da
discrepância entre a variância “a priori” e a variância “a posteriori” em relação ao
nível de confiança pré-estabelecido (AMORIM, 2005).
63
Na tabela de distribuição qui-quadrado é obtido os valores críticos de Ö + em
função do grau de liberdade e o nível de significância. Estes são comparados com o
valor de Ö + calculado (equação 107).
Ö+ =
צ1 .
×1
(107)
Sendo:
Ö + – qui-quadrado calculado
+ – variância “a priori”
As hipóteses adotadas neste teste para relacionar a variância “a priori” com a
variância “a posteriori” são (AMORIM, 2005):
Hipótese básica: \Q ∶ + = Q+
Hipótese alternativa: \- ∶ + ≠ Q+
Caso o valor de Ö + calculado esteja entre os valores críticos de Ö + extraídos da
tabela de distribuição do qui-quadrado para o nível de significância estabelecido e
considerando o número de graus de liberdade a hipótese básica não é rejeitada, o
que significa que o ajustamento realizado não apresentou nenhuma inconsistência.
3.4.6. APLICAÇÃO DO MODELO DO MÉTODO DE PROCRUSTES
De posse das coordenadas relativas topográficas ª, ª ª e das coordenadas
cartesianas tridimensionais (X, Y, Z) de todos os pontos da rede é possível montar
as matrizes necessárias para solução do problema de Procrustes parcial. O
problema de Procruste parcial está baseado na solução do sistema de matrizes da
forma [ = o. i , onde A representa as observações no sistema de posicionamento
local, B as observações no sistema cartesiano tridimensional geocêntrico e R a
matriz rotação que interliga os dois sistemas, sendo a última função das
coordenadas astronômicas (ϕ e Λ) do ponto origem do sistema e de uma orientação
no plano horizontal desconhecida.
64
Inicialmente o sistema [ = o. i é minimizado através do MMQ e posteriormente
a matriz rotação R é obtida utilizando decomposição em valores singulares,
apresentadas nas equações 108 e 109. A equação 110 ilustra a fórmula geral
montada nesta pesquisa para solução do desvio da vertical através do problema de
Procrustes parcial.
[i . o = . Ʃ+i
= + . .i i
ª+.
ƪ
Å +X
Ū+¾
Ū+Ī+Í
ª+.
ª+X
ª+¾
ª+À
ª+Í
ª+.
ª+X Ì
Ë
ª+¾ Ë =
ª+À Ë
ª+Í Ê
(108)
..
" +.
X.
.+
++
X+
. − +
Æ
.X
X − +
+X # . Åž − +
XX ÅÀ − +
ÄÍ − +
i
!. − !+
!X − !+
!¾ − !+
!À − !+
!Í − !+
. − +
X − + Ì
Ë
¾ − + Ë
À − + Ë
Í − + Ê
(109)
(110)
A matriz R encontra-se em sua forma completa apresentada na equação (43).
Após solução da matriz R as coordenadas astronômicas do ponto origem da rede
são extraídas utilizando as equações 47 e 48. De posse das coordenadas
geodésicas oriundas do posicionamento por satélites e das astronômicas, a
componente meridiana, a componente do primeiro vertical e o desvio da vertical são
determinados respectivamente pelas equações 19, 20 e 21.
3.4.7. VALIDAÇÃO DOS MÉTODOS
Esta fase consistiu na avaliação do valor encontrado para o desvio da vertical
empregando as metodologias. A variação da ondulação geoidal (ΔN) entre os pontos
em uma direção pode ser obtida através do arranjo da equação 65, mostrado abaixo
pela Equação 111.
ª$ = −Ù]. cosC£bÎ E + _. sinC£bÎ EÚ. ¢aZ}bÎ
(111)
Outro cálculo empregado para determinação da variação da ondulação geoidal
(ΔN) é considerando que a tangente do desvio da vertical multiplicada pela distância
entre dois pontos é igual ao valor da ΔN entre os pontos (Equação 112), essa
relação é apresentada graficamente pela Figura 16. No entanto, esta metodologia
65
considera que a ΔN é única em todas as direções, dependente apenas do valor final
do desvio da vertical e da distância.
ª$ = tana. ¢aZ}
(112)
Nesta validação foram utilizadas as estações geodésicas nº 91777 e 93640 do
IBGE, estando a primeira próxima da rede de teste e a segunda aproximadamente
1.200 metros distante da mesma. Tanto as coordenadas geodésicas, quanto os
valores de altitude geométrica e ortométrica são conhecidas, possibilitando o cálculo
da ondulação geoidal entre os pontos e do azimute geodésico da direção
considerada.
Com base nos valores das componentes do desvio da vertical encontrados
para a estação geodésica nº 91775 e nas equações 111 e 112, foi possível
comparar os valores das ΔN obtidos através das altitudes ortométricas e
geométricas dos pontos fornecidas pelo IBGE, com o alcançado empregando os
valores encontrados para as componentes do desvio da vertical.
As equações 113 e 114 ilustram a estimativa da discrepância entre as
ondulações geoidais.
ÛaZܬTÜa = <CℎÝ − ℎÎ E − C\Ý − \Î E? − Ù]. cosC£ÝÎ E + _. sinC£ÝÎ EÚ. ¢aZ}ÝÎ (113)
ÛaZܬTÜa = <CℎÝ − ℎÎ E − C\Ý − \Î E? − tana. ¢aZ}ÝÎ Sendo
ℎÝ – altitude geométrica do pilar m
ℎÎ - altitude geométrica do pilar j
\Ý - altitude ortométrica do pilar m
\Î – altitude ortométrica do pilar j
¢aZ} – distancia entre os pontos m e j
] – componente meridiana
(114)
66
η - componente do primeiro vertical
θ – Azimute da direção m-j
i – desvio da vertical
4. RESULTADOS E DISCUSSÕES
4.1.
COORDENADAS TOPOGRÁFICAS
As coordenadas relativas ª, ª ª e suas incertezas foram calculadas no
software Mathcad 14 e são apresentadas na Tabela 2.
Tabela 2 - Coordenadas relativas e incertezas das direções da rede de teste.
DIREÇÃO
91775-91772
91775-M01
91775-M02
91775-91776
91775-M03
Þß(m)
111,938
-120,701
-254,289
-122,361
263,284
95%
0,000
-0,014
-0,001
0,004
0,002
Þà(m)
-250,693
-253,577
-74,397
274,076
128,609
95%
0,001
0,006
0,004
0,002
0,003
Þá(m)
-1,262
-1,008
+0,103
+1,180
+0,391
95%
0,003
0,008
0,005
0,003
0,003
As precisões alcançadas se mostraram satisfatórias de acordo com o método
de posicionamento utilizado. O maior valor de incerteza encontrado foi de 1,4 cm
para a direção 91775-M01 e o menor de décimo do milímetro para a incerteza na
coordenada relativa Þß da direção 91775-91772, sendo por este motivo o valor
zerado na tabela.
As incertezas dos Þß, Þà â Þá foram determinadas considerando-se o cálculo
através da raiz quadrada da razão entre o somatório dos resíduos ao quadrado e o
numero de observações menos um, utilizando-se a média entre as quatro séries
como o valor de referência.
67
4.2.
COORDENADAS ORIUNDA DO POSICIONAMENTO POR SATÉLITES
As
coordenadas provenientes do posicionamento por satélites foram
determinadas pelo software Topcon Tools 7.5 e ajustada pelo MMQ. Calculou-se as
coordenadas cartesianas geocêntricas tridimensionais, as geodésicas e as altitudes
geométricas dos pontos da rede. A Tabela 3 mostra as coordenadas cartesianas
tridimensionais, a Tabela 4 as coordenadas geodésicas e altitudes com suas
respectivas incertezas dos pontos da rede.
Tabela 3 - Coordenadas cartesianas tridimensionais dos pontos da rede.
PONTO
91775
91772
M01
M02
M03
91776
X (M)
4254100,037
4254106,336
4253945,009
4253903,604
4254318,159
4254092,951
Y (M)
-4064931,935
-4064783,131
-4064950,75
-4065095,953
-4064776,199
-4065094,413
Z (M)
-2453402,132
-2453632,773
-2453635,551
-2453470,756
-2453283,682
-2453149,858
Tabela 4 - Coordenadas geodésicas, altitudes geométricas e respectivas incertezas dos pontos da
rede.
PONTO
91775
91772
M01
M02
M03
91776
Φ
22°46'17,07520"S
22°46'25,22470"S
22°46'25,31856"S
22°46'19,49333"S
22°46'12,89411"S
22°46'08,16550"S
95%
0,000
0,003
0,001
0,001
0,001
0,006
λ
43°41'50,51221"W
43°41'46,58817"W
43°41'54,74363"W
43°41'59,42652"W
43°41'41,28266"W
43°41'54,80176"W
95%
0,000
0,002
0,001
0,001
0,001
0,006
h (m)
12,180
10,868
11,169
12,276
12,546
13,318
95%
0,000
0,006
0,002
0,002
0,002
0,013
Considerando a metodologia empregada, os valores das incertezas estão
compatíveis. No processamento foi adotado valores nulos para as incertezas das
coordenadas Este, Norte e Altitude geométrica do ponto base (91775), pois se
pretendia determinar as incertezas do levantamento sem qualquer influência
externa.
4.3.
DESVIO DA VERTICAL PELO MÉTODO DE HELMERT
Os azimutes geodésicos foram determinados pelo software Topcon Tools 7.5 e
ajustados pelo MMQ, os quais encontram-se na Tabela 5.
68
Tabela 5 - Azimute geodésico das direções dos pontos da rede.
DIREÇÃO
91775-91772
91775-M01
91775-M02
91775-91776
91775-M03
AZIMUTE GEODÉSICO
155°56'17,7016"
205°27'17,2282"
253°41'39,7213"
335°56'25,7800"
63°57'53,0648"
A média dos ângulos verticais e da distancia inclinada com suas incertezas
obtidas a partir das 4 séries efetuadas em cada pilar de cada direção é apresentado
na Tabela 6.
Tabela 6 - Ângulos verticais e distâncias inclinadas com suas respectivas incertezas.
DIREÇÃO
91775-91772
91775-M01
91775-M02
91775-91776
91775-M03
ÂNGULO VERTICAL
90° 16’ 25,81’’
90° 12’ 58,87’’
89° 59’ 20,00’’
89° 47’ 10,00’’
89° 56’ 7,62’’
”
1,26
3,02
1,95
1,22
1,11
DISTÂNCIA INCLINADA (m)
274,552
280,840
264,949
300,151
293,017
95% (m)
0,001
0,001
0,001
0,000
0,000
Nas incertezas das distâncias, tanto as direções 91775-91776 como as 91775M03 apresentaram valores na ordem do décimo do milímetro, por este motivo os
exibidos na tabela encontram-se zerados devido os mesmos estarem sendo
demonstrados até o milímetro.
Os valores das altitudes geométricas necessárias para o cálculo com o modelo
apresentado encontram-se na Tabela 4. Os desníveis considerados no cálculo das
equações de observação do modelo paramétrico estão na Tabela 2.
No primeiro ajustamento foi considerado a matriz Peso igual a Identidade e no
segundo considerou-se o inverso das variâncias das observações. Ao final do
ajustamento, o que apresentou o menor somatório dos quadrados dos resíduos
seguindo o conceito fundamental do MMQ foi o que considerava a matriz Peso igual
a Identidade, logo o mesmo foi adotado nesta pesquisa. Contudo deve-se frisar que
antes de adotar um modelo, ambos passaram pelo teste global da variância “a
posteriori”. Foram realizadas apenas duas interações, pois na segunda o vetor
correção apresentava valores na ordem do décimo do milímetro ou menor. A Tabela
69
7 apresenta o somatório dos resíduos encontrados após o ajustamento,
considerando a matriz Peso unitária e ponderada com o inverso das incertezas das
observações.
Tabela 7 - Somatório dos resíduos com diferentes matrizes peso no ajustamento
Somatório dos Resíduos
5,875.10/æ
6,617.10/æ
Matriz Peso
Identidade
Incertezas das observações
A análise do ajustamento foi realizada utilizando o teste do qui-quadrado a um
nível de significância de 5% e 3 graus de liberdade, o valor de variância a priori
considerado foi igual à unidade. A Tabela 8 mostra o resultado do ajustamento
considerando as incertezas das observações na matriz peso e adotando a matriz
peso igual a identidade.
Tabela 8 - Teste qui-quadrado do ajustamento do modelo de Helmert para obtenção do desvio da
vertical.
Matriz Peso
Identidade
Incertezas das
observações
3
Ö,+ è
0,22
+
Ö,./
è
3
0,22
α (%)
r
5
5
+
9,35
Q+
0,59
Sentença de
Aceitação
0,22≤0,59≤9,35
APROVADO
9,35
1,49
0,22≤1,49≤9,35
APROVADO
+
Resultado
Inicialmente quando se realizou o teste, nenhuns dos dois modelos passaram,
pois identificou-se um problema de escala na matriz Peso que foi solucionada por
meio da multiplicação da mesma pelo fator 10X na matriz que considerava as
incertezas das observações e de 10Â para a matriz peso igual a identidade. O fato
da variância a posteriori ter passado no teste estatístico do qui-quadrado indica a
boa qualidade do ajustamento.
A Tabela 9, expressa o resultado da componente meridiana, da componente
primeiro vertical, do desvio da vertical, e suas respectivas incertezas após o
ajustamento.
70
Tabela 9 - Desvio da vertical e suas componentes
COMPONENTES DO DESVIO DA
VERTICAL
MÉTODO DE HELMERT
Incertezas com
95% de confiança (“)
ξ
η
Desvio da vertical (i)
-2,04”
6,15”
6,48”
0,00
0,00
0,00
As incertezas das componentes apresentaram valores nulos, devido às
mesmas serem menores que o centésimo do segundo. Como já apresentado, a
validação do resultado foi considerando os valores da variação de ondulação geoidal
entre os pontos 91775-91777, e 91775-93640 obtidos através de altitudes
geométricas e ortométricas fornecidos pelo IBGE e o alcançado utilizando os valores
das componentes do desvio da vertical determinadas pelo método de Helmert. A
distância entre os pilares e o azimute geodésico foram obtidos através do software
Adjust 6.1.0 por meio das coordenadas geodésicas dos pontos fornecidas pelo
IBGE. A Tabela 10 mostra os valores encontrados e sua discrepância.
Tabela 10 - Validação do resultado obtido com o modelo de Helmert.
DE
91775
91775
PARA
91777
93640
Distância
(m)
925,555
1195,460
DIFERENÇA DE ONDULAÇÃO
GEOIDAL (m)
Desvio da vertical
(modelo de Helmert)
(Δh –ΔH)
IBGE
Equação
Equação
111
112
0,021
0,020
0,029
-0,034
-0,037
-0,037
Discrepância (m)
Equação
113
0,001
0,003
Equação
114
0,008
0,003
Com base nestes resultados, percebe-se que a validação empregando a
equação 112 não representa adequadamente o comportamento do geóide local, pois
o mesmo é uma superfície que varia de acordo com cada direção, sendo este fato
não considerado na equação mencionada, ocasionado essa diminuição da
discrepância entre o valor encontrado e a referência (IBGE) quando a distância
aumenta. Diante deste fato, os valores considerados na validação da metodologia de
Helmert será o que emprega a equação 111.
Em um nivelamento considerando uma RN de partida e outra de chegada, o
erro de fechamento é calculado pela diferença entre o desnível determinado no
71
levantamento entre as RN’s e o considerado referência, sendo este fornecido pela
diferença entre os valores das altitudes das RN’s. Esta pesquisa utilizou uma
metodologia similar, pois ao invés do cálculo do erro de fechamento ser por meio do
conhecimento dos desníveis entre dois pontos com altitudes conhecidas, será pela
diferença de ondulação geoidal (ΔN) determinada através do nivelamento
trigonométrico e nivelamento espacial feito entre as referências.
De posse das discrepâncias entre os valores de variação de ondulação geoidal,
pode-se calcular a tolerância de fechamento do nivelamento realizado por meio da
equação 115.
discrepância mm = xmm. Ldistkm
(115)
Sendo:
x – tolerância de fechamento do nivelamento
dist – distância em quilômetros do nivelamento
A tolerância de fechamento encontrada entre os pilares 91775-91777 foi de 1,0
mm, e a entre os pilares 91775-93640 foi de 3,0 mm. Esses resultados indicam que
o nivelamento realizado pela metodologia empregada se enquadra na classe IN da
NBR-13133 que é de 12√ï, onde K é a distância em quilômetros.
4.4.
DESVIO DA VERTICAL PELO MMQ COM PONTOS NO SGL E SAL
Para determinação do desvio da vertical com a referida metodologia, fez-se
necessário o cálculo das coordenadas topocêntricas, as mesmas são apresentadas
na Tabela 11. As coordenadas relativas ª, ª, ª encontram-se apresentadas na
Tabela 02.
Tabela 11 - Coordenadas topocêntricas
De
91775
91775
91775
91775
91775
Para
91772
M01
M02
91776
M03
e (m)
111,937
-120,704
-254,290
-122,367
263,286
n (m)
-250,691
-253,578
-74,387
274,074
128,614
u (m)
-1,318
-1,017
0,090
1,131
0,359
72
O ajustamento dos dados pelo método dos mínimos quadrados foi
considerando a matriz Peso igual a identidade, devido a falta de conhecimento das
incertezas das coordenadas topocêntricas. Para a variância a priori foi adotado o
valor 1, e durante a aplicação do teste qui-quadrado foi detectado um problema de
escala na matriz peso, sendo a mesma multiplicada por 10¾ para solução.
Tabela 12 - Teste qui-quadrado do ajustamento do modelo para obtenção do desvio da vertical.
Matriz Peso
Identidade
α (%)
r
5
12
Ö,+ è
+
4,40
+
Ö,./
è
+
23,34
Q+
20,75
Sentença de
Aceitação
4,40≤20,75≤23,34
Resultado
APROVADO
Após o ajustamento dos dados e sua aprovação no teste qui-quadrado, foi
determinado os valores das componentes, meridiana e do primeiro vertical com suas
respectivas incertezas, sendo estas apresentadas na Tabela 13.
Tabela 13 - Desvio da vertical e suas componentes
COMPONENTES DO DESVIO DA
VERTICAL
MMQ com coordenadas no
SGL e SAL
Incertezas com
95% de confiança (“)
ξ
η
Desvio da vertical (i)
4,26”
8,85”
9,82”
0,00
0,00
0,00
As incertezas das componentes do desvio da vertical apresentaram valores
menores que o centésimo do segundo, sendo por este motivo que as mesmas
encontram-se zeradas na tabela.
Tabela 14 - Validação do resultado obtido com o modelo.
DE
PARA
91775
91775
91777
93640
Distância
(m)
925,555
1195,460
DIFERENÇA DE ONDULAÇÃO
GEOIDAL (m)
Desvio da vertical
(modelo MMQ)
(Δh-ΔH)
IBGE
Equação
Equação
111
112
0,021
0,001
0,044
-0,034
-0,042
-0,057
Discrepância (m)
Equação
113
0,020
0,008
Equação
114
0,023
0,023
Como na metodologia anterior, os resultados finais da diferença de ondulação
geoidal considerado foi o empregando a equação 111, pois este considera que o
73
geóide tem um comportamento diferente para cada direção. Analisando os
resultados, percebe-se que os valores encontrados para as componentes do desvio
da vertical com esta metodologia não estão tão condizentes com o modelo geoidal
local como os apresentados na metodologia de Helmert, tendo este fato relação com
alguns fatores tais como: maior complexidade do modelo de determinação das
componentes do desvio da vertical, número elevado de variáveis, dentre outros.
Os resultados obtidos com esta metodologia apresentaram tolerâncias de
fechamento de 20 mm entre os pilares 91775-91777 e de 7 mm entre os 9177593640. Os mesmos enquadram-se nas tolerâncias estabelecidas para o nivelamento
geométrico, classes IIN e IN respectivamente da NBR-13133, mostrando que o
referido método não proporcionou a mesma acurácia obtida pelo método de Helmert.
4.5.
DESVIO DA VERTICAL PELO MÉTODO DE PROCRUSTES
Foram realizadas diversas tentativas de encontrar o valor final da matriz rotação
e posteriormente calcular o desvio da vertical, contudo em nenhuma das tentativas
se conseguiu extrair corretamente as matrizes que compõem a decomposição por
valores singulares, sendo estas essenciais para o cálculo da matriz R.
Testes com dados de outros trabalhos também foram utilizados, entretanto o
memorial de cálculo adotado em todo o momento se mostrou inconsistente.
5. CONCLUSÕES E RECOMENDAÇÕES
As metodologias apresentadas para determinação do desvio da vertical foram
diferentes dos métodos convencionais de observações astronômicas, no entanto
mostraram promissores resultados. A integração de técnicas de topografia clássica
com o posicionamento por satélites se mostrou uma alternativa eficiente e viável na
determinação das componentes do desvio da vertical.
O problema parcial de Procrustes não pode ser analisado devido às
inconsistências encontradas no modelo empregado na determinação da matriz
rotação. A metodologia que relaciona, coordenadas topocêntricas com topográficas
74
apresentou menor acurácia que a metodologia que aplica o modelo de Helmert,
contudo considerando o seu pior resultado encontrado, a mesma poderia ser
enquadrada na classe IIN segundo a NBR-13133.
O modelo de maior simplicidade e que apresentou melhores resultados foi o de
Helmert, possibilitando ser enquadrado na classe IN de acordo com a NBR-13133,
sendo o nivelamento IN considerado o mais preciso dentre os estabelecidos na
norma.
Os objetivos deste estudo foram atingidos, tendo em vista que foram
apresentadas três metodologias para a determinação do desvio da vertical
empregando observáveis de posicionamento por satélites e topografia clássica e
determinado o valor do desvio da vertical para o ponto central da rede de estudo.
Sugere-se o emprego efetivo do problema parcial de Procrustes e posterior
análise de seus resultados. Diferentes configurações angulares e lineares na
geometria da rede de teste podem ser testadas, com o objetivo de analisar os
comportamentos dos modelos. Na validação dos resultados, recomenda-se que se
utilizem estações geodésicas ou referências de nível – RN mais distantes do ponto
central da rede, pois desta forma poderá ser determinado a distância máxima que o
comportamento do geóide modelado pelos valores das componentes do desvio da
vertical calculados, se mantém apresentando discrepâncias toleráveis.
Conclui-se que as duas metodologias aplicadas no trabalho são capazes de
determinar o desvio da vertical de forma eficiente e exequível, sendo a de Helmert a
que apresentou os melhores resultados.
75
6. REFERÊNCIAS BIBLIOGRÁFICAS
ABNT. NBR 13133 – Execução de Levantamento Topográfico. ABNT –
Associação Brasileira de Normas Técnicas, Rio de Janeiro, 1994.
AWANGE, J. L. Partial Procrustes solution of the threedimensional orientation
problem
from
GPS/LPS
observations.
2003.
Disponível
em:
<http://www.unistuttgart.de/gi/research/schriftenreihe/quo_vadis/pdf/awange.pdf>.
Acesso em: 18 dez 2013.
AMORIM, G. P. Curso de Formação Continuada em Georreferenciamento
Aplicado ao Cadastro Rural, Módulo 7: Ajustamento de Observações. Centro
Federal
de
Educação
Tecnológica
do
Espirito
Santo,
2005.
Disponível
em:<ftp://ftp.cefetes.br/cursos/Geomatica/Geraldo/AjustamentoObserva%E7%F5es/
AjustamentoGerreferenciamento.pdf>. Acesso em: 12 dez 2013.
ANDRADE. R. J. O. Determinação do Desvio da Vertical Empregando
Observáveis da Topografia Clássica e do Posicionamento por Satélites. 92f.
Tese (Magister Scientiae) – Universidade Federal de Viçosa, Programa de PósGraduação em Engenharia Civil. Defesa: Minas Gerais, 2008. Disponível
em:<http://www.dec.ufv.br/modules/mastop_publish/files/files_4cadba7047f71.pdf >.
Acesso em: 13 nov 2013.
CORRÊA, I. C. S. Topografia aplicada à Engenharia Civil. Instituto de
Geociências, Departamento de Geodésia, Universidade Federal do Rio Grande do
Sul,
2012.
Disponível
em:
<
http://www.geodesia.ufrgs.br/trabalhosdidaticos/Topografia_Aplicada_A_Engenharia
_Civil/Apostila/TopoAplicada_2012.pdf >. Acesso em: 14 nov 2013.
ELOI, F. H.; SILVA, A. S. Determinação do desvio da vertical com o uso do
método astrogeodésico numa pequena área de Viçosa – MG. In: Simpósio
Brasileiro de Ciências Geodésicas e Tecnologias da Geoinformação, 3, 2010.
Recife. Anais... Recife: SIMGEO, 2010.
76
FILHO, F. J. E. A. Data Mining em Grandes Redes: Superfícies de Coesão sobre
Base Multidimensionalmente Escalonada. 2003. 158f. Tese (Mestrado em
Estatística) - Instituto de Matemética e Estatística, Universidade de São Paulo.
Defesa:
São
Paulo,
2003.
Disponível
em:
<http://bibliotecadigital.fgv.br/dspace/bitstream/handle/10438/2917/P00282_1.pdf?se
quence=1 >. Acesso em: 05 dez 2013.
FILHO, B. C. Curso de Extensão em Georreferenciamento Aplicado à Geodésia:
Elementos de Geodésia Geométrica. Universidade Federal de Mato Grosso, 2009.
Disponível em: <>. Acesso em: 05 dez 2013.
IBGE. Fundação Instituto Brasileiro de Geografia e Estatística. Resolução nº 23. Rio
de Janeiro, 1989. 4 p.
LAWSON, T. Álgebra Linear. Tradução: Elza F. Gomide. Editora Edgard Blucher
Ltda, 1997.
MONICO, J. F. G. Posicionamento pelo NAVSTAR-GPS:
fundamentos e aplicações. 1 ed. São Paulo: Ed. da UNESP, 2000.
Descrição,
RODRIGUES, Dalto Domingos. Rede geodésica de precisão no Estado de Minas
Gerais: avaliação de diferentes estratégias de processamento e ajustamento.
2002. Tese (Doutorado em Engenharia de Transportes) - Escola Politécnica,
Universidade
de
São
Paulo,
São
Paulo,
2002.
Disponível
<http://www.teses.usp.br/teses/disponiveis/3/3138/tde-06122002-115813/>.
em:
Acesso
em: 14 dez 2013.
SÁ, N. C. Elementos de Geodésia. Departamento de Geofísica, Universidade de
São Paulo. Disponível em: < http://social.stoa.usp.br/geografia/apostila-elementosda-geoda-sia-1.pdf?view=true>. Acesso em: 14 dez 2013.
77
SOUZA, W. O.; Garnés, S. J. A. Determinação dos componentes do desvio da
vertical pelo método de Helmert: Relacionamento entre nivelamento de
precisão com altitude elipsoidal e MAPGEO2010. In: Simpósio Brasileiro de
Ciências Geodésicas e Tecnologias da Geoinformação, 4, 2012. Recife. Anais...
Recife: SIMGEO, 2012.
TORGE, W. Geodesy. Berlin, New York : Walter de Gruyter, 1980. 254 p.
VEIGA, L. A. K. et al. Fundamentos de Topografia. Universidade Federal do
Paraná,
2012.
Disponível
em:
<
http://www.cartografica.ufpr.br/docs/topo2/apos_topo.pdf >. Acesso em: 12 dez
2013.
ZANETTI, M. A. Z. Implicaçoes atuais no relacionamento entre sistemas
terrestres de referencia de origem local e geocentrica. 2006. xvi, 111f. Tese
(doutorado) - Universidade Federal do Paraná, Setor de Ciencias da Terra,
Programa de Pós-Graduaçao em Ciencias Geodésicas. Defesa: Curitiba, 2006.
Disponível em: <http://hdl.handle.net/1884/6291>. Acesso em: 12 dez 2013.
ZANETTI, M. A. Z. Geodésia. Universidade Federal do Paraná, 2007. Disponível
em: <>. Acesso em: 12 dez 2013.
ZUBEN, V. Análise de Dados em Bioinformática. Universidade Estadual de
Campinas
–
Unicamp.
Disponível
em:
<
ftp://ftp.dca.fee.unicamp.br/pub/docs/vonzuben/ia368_02/topico8_02.pdf >. Acesso
em: 05 dez 2013.
ZAKATOV, P.S. Curso de Geodesia Superior. Tradução do original russo de 1976.
Rússia: Editorial Mir, 1981. 635 p.
78
7. ANEXO DIGITAL
Anexo 01 – Planilha de dados de campo do levantamento topográfico.
Anexo 02 – Cálculos dos ângulos horizontais, verticais, distâncias e suas respectivas
incertezas.
Anexo 03 – Cálculo das coordenadas relativas Δx e Δy com suas respectivas
incertezas.
Anexo 04 - Cálculo dos desníveis (Δz) com sua respectiva incerteza.
Anexo 05 – Método de Helmert considerando a matriz Peso igual a identidade.
Anexo 06 – Métodos de Helmert considerando a matriz Peso igual ao inverso da
variância das observações.
Anexo 07 – Cálculo do desvio da vertical empregando o Método dos Mínimos
Quadrados (MMQ) com pontos no SGL e SAL.
Baixar