III Simpósio Brasileiro de Ciências Geodésicas e Tecnologias da Geoinformação
Recife - PE, 27-30 de Julho de 2010
p. 001-008
MUDANÇA DA TEMPERATURA E EFEITOS NA CALIBRAÇÃO DE
CÂMARAS DIGITAIS: ESTUDO DE CASO
MAURICIO GALO 1
ANTONIO MARIA GARCIA TOMMASELLI 1
JÚLIO KIYOSHI HASEGAWA 1
ROBERTO DA SILVA RUY 2
THIAGO TIEDKE DOS REIS 2
1
Universidade Estadual Paulista – UNESP
Departamento de Cartografia, Presidente Prudente, SP
Programa de Pós-Graduação em Ciências Cartográficas - PPGCC
{galo, hasegawa, tomaseli}@fct.unesp.br
2
Engemap – Engenharia, Mapeamento e Aerolevantamento Ltda
[email protected], [email protected]
RESUMO - As câmaras digitais modernas, independente de sua geometria, possuem sensores a base de
elementos semicondutores que são, por natureza, influenciados por mudanças de temperatura, que
também podem afetam o sistema óptico das câmaras. Alguns trabalhos na literatura têm procurado
analisar influências da mudança de temperatura na calibração das câmaras, ou, mais especificamente, nos
parâmetros estimados neste processo, sendo relevante avaliar a existência de correlação entre a
temperatura e estes parâmetros. Além disso, é importante avaliar quão significante é esta
interdependência, bem como a sua influência em aplicações como mapeamento, por exemplo. Dada a
diversidade de câmaras e sensores de imageamento disponíveis, não é possível afirmar que o
comportamento se repita, ou seja significante, para diferentes câmaras. Deste modo, este trabalho tem o
propósito de mostrar, com base em experimentos com imagens reais, adquiridas em diferentes
temperaturas, o comportamento de alguns parâmetros de orientação interior (OI) estimados na calibração
de uma câmara digital. Procurou-se avaliar a correlação entre a temperatura e alguns dos parâmetros de
OI, sendo observado que algumas correlações podem ser consideradas significativas.
ABSTRACT - The modern digital cameras, no matter the geometry of the sensitive surface, are based on
semiconductors elements that are influenced by temperature changes, which also has an influence on the
camera optical system. Some previous works on the literature approached the influences of the
temperature change in the camera calibration, or more specifically in the estimated parameters, being
relevant to evaluate the correlation between the temperature change and these parameters. Besides that, it
is important to evaluate how significant is this interdependence and also the influence in the mapping
applications, for instance. Considering the diversity of cameras and sensors available, it is not possible to
state that the same behavior occurs for different cameras. This work has the aim to present, based on
experiments with real images acquired in different temperatures, the behavior of some inner orientation
parameters for one digital camera. It was also evaluated the correlation between the temperature and some
of IO parameters, being observed that some correlations can be considered significant.
1 INTRODUÇÃO E OBJETIVOS
O crescente desenvolvimento tecnológico das
câmaras digitais, o aumento da resolução espacial e
espectral, a diversificação da geometria das câmaras (de
quadro, com múltiplas objetivas, de varredura, dentre
outras) mais e mais áreas passam a utilizar este tipo de
sensor de imageamento. Em aplicações na área de
Fotogrametria e Visão Computacional, este tipo de sensor
é muitas vezes usado com finalidades métricas, sendo
neste caso relevante conhecer o comportamento e a
estabilidade do sistema óptico e dos sensores de
imageamento em uso, que são baseados principalmente
em dispositivos semicondutores a base de silício.
Com este propósito, alguns autores avaliam o
comportamento da câmara ao longo do tempo, pela
análise da estabilidade dos parâmetros de orientação
interior (OI), que têm relação com a geometria do feixe
perspectivo, como por exemplo feito por Habib e Morgan
(2003, 2005) e Habib et al (2006). Nos trabalhos de
Dähler (1987) e Gülch (1986) os autores procuraram
avaliar se a mudança da temperatura tem efeito nas
M. Galo, A. M. G. Tommaselli, J. K. Hasegawa, R. da S. Ruy, T. T. dos Reis
Recife - PE, 27-30 de Julho de 2010
p. 002-008
III Simpósio Brasileiro de Ciências Geodésicas e Tecnologias da Geoinformação
medidas realizadas com as imagens adquiridas. Em
Jacobsen e Wegmann (2002) os autores discutem,
baseados em dados do trabalho de Meier (1978)1, a
variação da distância focal de duas câmaras
aerofotogramétricas com diferentes aberturas, em
diferentes condições e os resultados indicam que o tipo de
câmara, as condições de operação e o período em que a
câmara permanece numa mesma temperatura têm efeito
sobre a variação da distância focal. No trabalho de
Mitishita et al (2009) os autores concluem, com base nos
experimentos, que os resultados não indicaram que a
causa das mudanças nos parâmetros de OI foram
decorrentes de mudanças na temperatura.
Com base no que foi exposto propõe-se, neste
trabalho, a aquisição de imagens em diferentes condições
térmicas, a realização da calibração da câmara bem como
a análise do comportamento de alguns parâmetros de OI,
nas diferentes temperaturas, procurando avaliar eventuais
correlações.
2 MUDANÇA DA TEMPERATURA
SENSORES CCD E CMOS
E
OS
As modernas câmaras digitais são baseadas em
sensores fotossensíveis a base de silício, sendo os mais
utilizados o CCD (Charge Coupled Device) e o CMOS
(Complementary Metal Oxide Semiconductor). As
diferenças na arquitetura destes sensores implicam em
diferenças de desempenho, que são normalmente
avaliadas considerando oito atributos, conforme descrito
por Litwiller (2001): quantidade de sinal gerado pelo
sensor por unidade de energia incidente (responsivity),
intervalo dinâmico, uniformidade, shuttering, velocidade,
windowing, antiblooming e biasing / clocking.
Independente da tecnologia considerada (CCD ou
CMOS), um aspecto que é comum às duas tecnologias se
refere aos efeitos da variação da temperatura. Um dos
efeitos relacionados à temperatura é chamado dark
current, que ocorre devido a propriedade do sensor CCD
gerar cargas em cada fotodetector, com a mudança na
temperatura. Deste modo, quanto maior a temperatura
maior será este efeito e maior será o ruído na imagem
(GRAHAM e KOH, 2002). Para outras fontes de ruído
que ocorrem neste tipo de sensor são sugeridas as
seguintes referências: Shortis e Beyer (1996) e Graham e
Koh (2002).
Uma vez que os efeitos mencionados têm alguma
influência no processo de aquisição, observa-se que
alguns fabricantes incorporam dispositivos de controle da
temperatura em seus produtos. Um desse exemplo é a
Hasselblad, que utiliza a tecnologia denominada DDC Double Duration Circuit
incorporada em alguns
modelos, como pode-se ver em Hasselblad (2004). Além
da Hasselblad, a Leica Geosystems também tem esta
preocupação, sendo a estabilização térmica realizada nas
1
câmaras ADS40 e ADS80, por exemplo. Como destacado
por Eckardt et al (2000) a invariância à temperatura e à
pressão são alguns dos elementos que devem ser
considerados no desenvolvimento de sistemas ópticos,
para câmaras de alto desempenho.
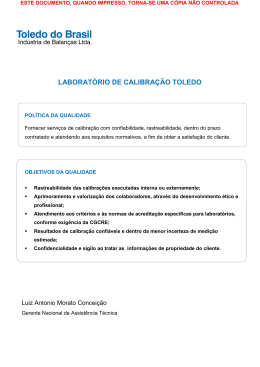
Independente dos efeitos inerentes ao sensor, outro
aspecto relevante consiste em realizar a calibração em
uma dada condição térmica e depois adquirir as imagens
em outra condição. Isso pode ocorrer devido ao gradiente
térmico da atmosfera, que possui um valor médio de 1oC/153,9m (ou -0,98oC/1000 pés) o que significa uma
redução de aproximadamente 19,5oC para uma altura de
vôo de 3 km, como pode-se ver na Fig. 1.
Figura 1 – Curva Altura de vôo x Temperatura,
considerando o gradiente térmico médio da atmosfera.
Deste modo, deve-se evitar utilizar parâmetros
estimados em uma dada condição, para corrigir erros
sistemáticos em imagens adquiridas em condições
significativamente diferentes, caso o sistema não esteja
equipado com dispositivos para estabilização térmica.
3 MODELO MATEMÁTICO UTILIZADO NA
CALIBRAÇÃO
O modelo matemático fundamental utilizado na
calibração de câmaras é baseado nas equações de
colinearidade, com parâmetros adicionais, ou seja:
x´= x0 + ∆x − c
Nx
D
y´= y0 + ∆y − c
Ny
,
(1)
D
onde
N x = m 11 (X − X cp ) + m 12 ( Y − Ycp ) + m 13 ( Z − Z cp )
N y = m 21 ( X − X cp ) + m 22 (Y − Ycp ) + m 23 ( Z − Z cp )
, (2)
D = m 31 (X − X cp ) + m 32 ( Y − Ycp ) + m 33 ( Z − Z cp )
sendo c a distância principal (ou constante) da câmara;
(X,Y,Z) são as coordenadas de um ponto no espaço
objeto; (Xcp,Ycp,Zcp) são as coordenadas dos centros
perspectivos; mij são os elementos da matriz de rotação,
calculados em funções das rotações ω, ϕ e κ em torno dos
eixos X, Y e Z respectivamente; (x´,y´) são as
Meier, H.-K. The effect of Environmental Conditions on
Distortion, Calibrated Focal Length and Focus of Aerial Survey
Cameras. In.: ISP Symposium, Tokyo, May 1978.
M. Galo, A. M. G. Tommaselli, J. K. Hasegawa, R. da S. Ruy, T. T. dos Reis
III Simpósio Brasileiro de Ciências Geodésicas e Tecnologias da Geoinformação
coordenadas do ponto observado na imagem, no sistema
com origem no centro da imagem; (x0,y0) são as
coordenadas do ponto principal e (∆x,∆y) representam as
funções capazes de modelar as distorções em x e y
respectivamente. Nestas funções podem ser considerados
diferentes efeitos. O mais usual, para o caso de câmaras
não métricas, é considerar as distorções radial simétrica
(δxr, δyr), a distorção descentrada (δxd, δyd) e, em alguns
casos, a distorção de afinidade (δxa, δya), escritos de
forma genérica por:
∆x δx r δx d δx a
∆y = δy + δy + δy .
r d a
(3)
Os modelos escritos na Eq. 3 podem ser escritos
em função dos parâmetros da distorção radial simétrica
(k1, k2 e k3), da distorção descentrada (P1 e P2) e dos
parâmetros de afinidade (A, B). Para detalhes adicionais
sobre os modelos descritos, bem como para a
interpretação física, as seguintes referências são
sugeridas: Moniwa (1972), Merchant (1979), Andrade
(2003) e Galo (1993). Para outros modelos de afinidade
sugere-se consultar Habib e Morgan (2003, 2005) e ILBM
(2007).
Com base nas Eqs. 1 a 3 foi implementado um
aplicativo CC – Calibração de Câmaras, que realiza o
ajuste pelo Método dos Mínimos Quadrados (MMQ).
Este aplicativo permite que o usuário escolha o conjunto
de parâmetros a serem estimados no processamento, além
de permitir a realização da autocalibração, sendo também
incorporada neste aplicativo a análise da significância dos
parâmetros, como descrito em Galo et al (2008).
Além do aplicativo mencionado foi usado também,
em algumas comparações e análises, o aplicativo CMC Calibração Multi-Câmara (RUY, 2008; RUY et al, 2009).
Esta comparação foi feita com o propósito de avaliar os
resultados de eventuais correlações entre a temperatura e
os parâmetros de OI analisados em processamentos
independentes realizados com os mesmos dados.
4 EXPERIMENTOS E RESULTADOS
4.1 Câmara utilizada
Para a realização dos experimentos relacionados à
mudança de temperatura, foram adquiridas imagens
utilizando 3 câmaras. No entanto, neste trabalho serão
discutidos apenas os resultados obtidos com as imagens
obtidas com a câmara Fuji FinePix S3 PRO (Fig. 2), que
possui as seguintes características: 4256 (h) x 2848 (v)
pixels (12,1 Mpixel); sensor Super CCD SR II de
dimensão 23 x 15,5 mm; dimensão do pixel de 5,4 µm;
distância focal nominal de 28 mm e no de série
63A0072B.
Recife - PE, 27-30 de Julho de 2010
p. 003-008
a)
b)
Figura 2 – Câmara Fuji FinePix S3 PRO utilizada na
aquisição das imagens (a) e detalhe de um fotodetector do
sensor utilizado por esta câmara (b).
4.2 Aquisição das imagens em diferentes temperaturas
e medição das coordenadas
Na análise do comportamento dos parâmetros de
OI em diferentes temperaturas, deve-se considerar que
vários fatores afetam a qualidade dos parâmetros obtidos
no ajustamento pelo MMQ. Como exemplo, pode-se
mencionar a geometria das imagens do bloco, a qualidade
das medidas realizadas, a distribuição dos pontos no plano
imagem, a qualidade das coordenadas do apoio de campo,
dentre outros fatores.
Considerando o propósito do trabalho de avaliar o
efeito da temperatura, procurou-se realizar as aquisições
das imagens de modo que este fator fosse o único a ser
modificado significativamente. As variações de pressão
não foram avaliadas neste trabalho. Deste modo, foram
realizadas quatro séries de imagens, com a mesma
câmara, em diferentes temperaturas, sendo as imagens
adquiridas dos mesmos pontos de vista, de modo que a
geometria fosse semelhante, afetando igualmente os
processamentos.
Para a mudança da temperatura as câmaras
utilizadas na aquisição ficaram em uma sala climatizada
durante uma noite inteira, de modo que na manhã seguinte
as imagens fossem adquiridas com a câmara em uma
temperatura reduzida. Para o transporte das câmaras
foram usadas bolsas térmicas, a fim de modificar o
mínimo a temperatura até o início da aquisição. Para a
medição das temperaturas foram utilizados 3 termômetros
digitais, sendo feita a média das leituras dos 3
termômetros.
Deste modo, a primeira aquisição foi realizada
com a câmara mais fria, logo pela manhã. Antes da
segunda aquisição, após 4 horas, as câmaras ficaram em
um ambiente climatizado (com temperatura superior à da
primeira aquisição). Antes da terceira aquisição as
câmaras foram colocadas dentro de um veículo ao sol, por
algumas horas, de modo a elevar e estabilizar a
temperatura. Finalmente, a última aquisição foi feita
repetindo o mesmo procedimento da primeira, sendo as
imagens adquiridas no dia seguinte.
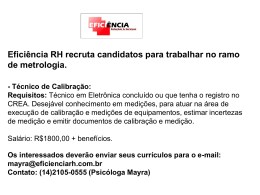
As imagens foram adquiridas no Campo de
Calibração de Câmaras da FCT/UNESP, localizado numa
das paredes externas do Ginásio de Esportes, como
mostrado na Fig. 3. Nesta figura são mostrados os 5
pontos a partir do qual as imagens foram adquiridas. Dos
pontos P1 a P4 foram adquiridas 4 imagens (giradas entre
M. Galo, A. M. G. Tommaselli, J. K. Hasegawa, R. da S. Ruy, T. T. dos Reis
III Simpósio Brasileiro de Ciências Geodésicas e Tecnologias da Geoinformação
si de 90o) e do ponto P5 foi tirada uma imagem. Deste
conjunto de imagem foram escolhidas 9 imagens: uma do
ponto P5 e duas de cada uma dos demais pontos.
Recife - PE, 27-30 de Julho de 2010
p. 004-008
Na Fig. 5a e 5b são mostrados os alvos e a posição
estimada com qualidade subpixel pelo aplicativo MID e
em 5c é mostrado um alvo medido pelo aplicativo
PMonoComp.
Um aspecto também importante na calibração,
além da qualidade das medidas, se refere à distribuição
dos pontos por todo o quadro, principalmente para a
modelagem dos parâmetros relacionados à distorção do
sistema óptico. Na Fig. 6 é mostrada a distribuição dos
pontos medidos em todas as 9 imagens, para uma das
coletas. Como é possível notar, embora algumas regiões
apresentem uma concentração maior de pontos, os pontos
observados estão distribuídos por todo o quadro.
Figura 3 – Ginásio de esportes e a localização dos pontos
onde as imagens foram adquiridas.
Na Figura 4 é mostrado um dos grupos de imagens
utilizados no processamento.
Figura 6 – Pontos medidos nas 9 imagens de uma das
coletas realizadas.
4.3 Estratégia usada nos processamentos
Como mencionado na Seção 3, um dos aplicativos
foi utilizado para realizar a autocalibração, onde o
mínimo de informações do espaço objeto é utilizado. No
entanto, antes de realizar a autocalibração a seguinte
estratégia foi adotada:
Figura 4 – Conjunto de 9 imagens utilizadas num dos
processamentos.
Adquiridas e selecionadas as imagens, foram
realizadas as medidas dos alvos, no espaço imagem. Para
tanto foram utilizados os aplicativos MID (REISS, 2002).
e PMonoComp2 . No aplicativo MID pode-se fazer
medidas usando o centro de massa ou determinar a
intersecção a partir de duas retas. O aplicativo
PMonoComp utiliza também o centro de massa. Na Fig. 5
são mostrados 3 alvos medidos.
■
■
■
■
■
a)
b)
c)
Figura 5 – Exemplos de 3 alvos circulares medidos,
usando o aplicativo MID (a e b) e PMnonoComp (c).
2
■
Foi feito um pré-processamento, realizando a
calibração clássica com parâmetros adicionais,
usando as coordenadas dos pontos do campo de
calibração;
Os resíduos obtidos deste processamento foram
analisados e os pontos com resíduos maiores que 1,5
pixels foram medidos novamente;
Após o pré-processamento foram escolhidos dois
conjuntos de parâmetros de OI:
- c, x0, y0, k1, k2
- c, x0, y0, k1, k2, P1, P2
Para a autocalibração foi fixada a posição e
orientação de uma das câmaras, correspondendo a 6
injunções;
Como o número mínimo de injunções para definir o
referencial é 7, mais uma injunção bastaria, mas
foram dadas 2 injunções de distâncias. Estas
distâncias foram medidas diretamente no objeto com
um paquímetro de precisão (Pantec 2000mm / 80",
leitura ±0,020mm);
Como o programa necessita das coordenadas
aproximadas de, pelo menos, um ponto do espaço
Autor: Prof. Dr. Júlio K. Hasegawa, UNESP – Dep. de
Cartografia, Presidente Prudente SP.
M. Galo, A. M. G. Tommaselli, J. K. Hasegawa, R. da S. Ruy, T. T. dos Reis
III Simpósio Brasileiro de Ciências Geodésicas e Tecnologias da Geoinformação
objeto, foram dadas 3 injunções de posição, com
desvio-padrão de σX = 2 m, σY = 2 m e σZ = 1 m,
sendo todos os demais pontos livres no ajustamento.
Além desse processamento foram realizados
processamentos usando a calibração com os pontos de
apoio (e não autocalibração) com o aplicativo CMC, a fim
de avaliar as correlações entre a temperatura e os
parâmetros de OI, por processamentos independentes.
4.4 Resultados dos processamentos
Os processamentos foram realizados, considerando
a estratégia descrita na sub-seção anterior. Na Fig. 7 são
mostrados os resíduos, no espaço imagem, após o
processamento das imagens da primeira coleta.
Recife - PE, 27-30 de Julho de 2010
p. 005-008
Os resíduos mostrados na Fig. 7 dão uma
indicação da qualidade do ajuste dos dados ao modelo,
sendo também importante ter algum tipo de controle
externo da qualidade. Para este controle as coordenadas
dos pontos no espaço objeto estimadas no ajustamento
foram usadas para o cálculo de distâncias, sendo estas
distâncias “estimadas” comparadas com as distâncias de
referência medidas diretamente no espaço objeto, também
com o paquímetro de precisão mencionado (Seção 4.3).
Nesta análise, não foram incluídas as duas distâncias
usadas como injunção em cada processamento e o maior
valor de EMQ3 das distâncias, para as 4 coletas, foi de
2,1mm (no espaço objeto).
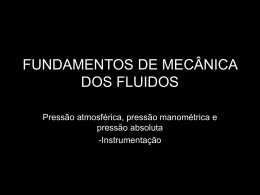
Na Figura 8 são mostrados três gráficos de barras:
os dois primeiros (Figuras 8a e 8b) com os valores da
distância focal estimada em cada coleta, para dois
conjuntos de parâmetros de OI (c, x0, y0, k1, k2, P1, P2 e c,
x0, y0, k1, k2), bem como os valores das temperaturas em
cada caso (8c).
Pode-se observar que o maior valor de c, para os
dois processamentos, correspondeu ao conjunto de
imagens onde a temperatura foi maior, podendo-se
observar visualmente que existe correlação, que será
estimada e avaliada na próxima seção.
Figura 7 – Resíduos nos pontos imagem após a
autocalibração dos pontos da coleta 1 considerando os
parâmetros: c, x0, y0, k1, k2, P1, P2.
a)
A Fig. 7 é mostrada apenas para verificar a
magnitude dos resíduos, podendo-se notar que em todos
os pontos os resíduos foram menores que 1 pixel. A Tab.
1 mostra os valores dos parâmetros de OI (c, x0, y0, k1, k2,
P1, P2) com os respectivos desvios padrão, bem como os
valores de graus de liberdade (gl), qui-quadrado (χ2)
amostral (QQa) e χ2 teórico (QQt) para as 4 coletas. Estes
últimos valores foram usados para avaliar a aceitação do
ajustamento, via teste χ2, com nível de confiança de 90%.
Tabela 1 – Parâmetros de OI e estatísticas para cada uma
das 4 coletas feitas com a câmara Fuji FinePix S3 PRO.
b)
c)
Figura 8 – Valores da distância focal estimada
considerando o conjunto de parâmetros (c, x0, y0, k1, k2,
P1, P2) em (a); os parâmetros (c, x0, y0, k1, k2) em (b); e as
temperaturas em cada uma das 4 coletas (em c).
4.5 Análise da correlação entre a temperatura e alguns
parâmetros de OI
Nesta seção é feita uma análise da correlação
existente entre a temperatura e alguns dos parâmetros de
OI estimados para cada uma das 4 coletas. A correlação é
3
Admite-se que EMQ é equivalente a RMSE - Root Mean
n
Square Error, i. e.:
2
RMSE = ∑ (x i − x ) (n − 1)
i =1
M. Galo, A. M. G. Tommaselli, J. K. Hasegawa, R. da S. Ruy, T. T. dos Reis
III Simpósio Brasileiro de Ciências Geodésicas e Tecnologias da Geoinformação
calculada pelo Coeficiente de Correlação de Pearson (ρ),
que varia no intervalo [-1,1].
A Tabela 2, na sequência, mostra os valores dos
parâmetros de OI estimados por autocalibração, bem
como os valores de ρ entre a temperatura e cada
parâmetro do conjunto (c, x0, y0, k1, k2). Nesta tabela a
seta à esquerda aponta para os valores de ρ. Por exemplo,
a partir da Tabela 2, pode-se ver que o coeficiente de
correlação entre a temperatura (T) e a distância focal (c)
obtido foi de ρ(T,c)=90,2%.
Tabela 2 – Parâmetros de OI estimados por autocalibração
e correlações com a temperatura, para a câmara Fuji
FinePix S3 PRO.
Ao observar os valores de ρ mostrados na Tabela
2, onde foram considerados os parâmetros, pode-se notar
que todos os valores de ρ foram, em valor absoluto,
maiores que 75%, indicando a existência de significativas
correlações.
Processamento análogo foi realizado considerando
o conjunto de parâmetros de OI (c, x0, y0, k1, k2, P1, P2)
usando autocalibração, sendo calculados também os
valores de ρ.
Como mencionado na Seção 4.3, utilizando o
mesmo conjunto de dados foram feitos experimentos, para
as 4 coletas, considerando a calibração clássica e usando
as coordenadas dos pontos de apoio, ou seja, sem realizar
a autocalibração. Como meio de controle externo nestes
processamentos foram avaliados os valores de EMQ para
as discrepâncias nos pontos de apoio, sendo observado
que o maior valor de EMQ foi de 3mm, indicando que os
processamentos são compatíveis.
As correlações entre a temperatura e alguns dos
parâmetros de OI (c, x0, y0), neste experimento, bem
como nos dois anteriores, considerando a autocalibração,
são sintetizados na Tabela 3.
Tabela 3 – Correlações entre a temperatura (T) e os
parâmetros de OI c, x0 e y0, para os experimentos
realizados com a câmara Fuji FinePix S3 PRO.
Correlações (%)
Experimentos
[Aplicativo]
ρ(T,c) ρ(T,x0) ρ(T,y0)
Autocalibração [CC]
90,2
96,3
80,8
(c,x0,y0,k1,k2)
Autocalibração [CC]
73,3
72,8
41,7
(c,x0,y0,k1,k2,P1,P2)
Calibração [CMC]
73,0
93,3
90,4
(c,x0,y0,k1,k2)
Média
± Desvio padrão
78,8
±9,8
87,5
±12,8
71,0
±25,8
Recife - PE, 27-30 de Julho de 2010
p. 006-008
Com base na Tabela 3, onde apenas 3 correlações
para cada experimento são destacadas, pode-se notar que
todas as correlações são maiores ou iguais a 73%, exceto
a correlação ρ(T,y0) para o segundo experimento
(considerando c, x0, y0, k1, k2, P1, e P2), que resultou numa
correlação pequena (ρ(T,y0)=41,7%).
Ao observar na Tabela 3 os dois experimentos nos
quais foram considerados apenas os parâmetros (c, x0, y0,
k1, k2,), com aplicativos distintos e diferentes abordagens,
as correlações mostradas foram elevadas (≥73%),
indicando uma concordância dos resultados em termos de
correlação entre temperatura os parâmetros c, x0, e y0 para
os processamentos independentes.
A partir dos parâmetros de k1 e k2, mostrados na
Tab. 2 as curvas da distorção radial simétrica podem ser
traçadas, como mostrado na Fig. 9a. Em 9b mostra-se um
detalhe ampliado das mesmas curvas, podendo-se
observar as diferenças em seu comportamento para cada
uma das coletas.
a)
b)
Figura 9 – Comportamento da curva de distorção radial
simétrica para cada uma das coletas, em diferentes
temperaturas.
5 CONCLUSÕES
Neste trabalho foram discutidos e avaliados alguns
aspectos relacionados ao efeito da temperatura nos
parâmetros de OI para câmaras digitais, sendo realizados
experimentos com dados reais em diferentes
temperaturas.
A fim de realizar os experimentos com o mínimo
de influência dos pontos do espaço objeto alguns
processamentos foram realizados considerando a
M. Galo, A. M. G. Tommaselli, J. K. Hasegawa, R. da S. Ruy, T. T. dos Reis
Recife - PE, 27-30 de Julho de 2010
p. 007-008
ECKARDT,
A.;
BRAUNECKER,
B.;
SANDAU,
R. Performance of the imaging system in the LH Systems
ADS40 Airborne Digital Sensor. In.: IAPRS - International
Archives of Photogrammetry and Remote Sensing, Vol.
XXXIII, Amsterdam, 2000.
III Simpósio Brasileiro de Ciências Geodésicas e Tecnologias da Geoinformação
autocalibração. Nestes processamentos foram impostas
injunções na posição do CP de uma das câmaras e em
medidas de distâncias realizadas diretamente no espaço
objeto com um paquímetro. Na calibração clássica foram
utilizados somente os pontos de apoio. Em ambos os
casos foram utilizadas imagens convergentes.
Como controle externo, no caso da autocalibração,
foi calculado o EMQ das distâncias e, no caso da
calibração clássica, os valores do EMQ para as
discrepâncias nas componentes dos pontos do espaço
objeto.
Para os experimentos realizados com diferentes
grupos de parâmetros de OI foi possível observar que o
coeficiente de correlação médio entre a temperatura da
câmara durante a coleta e a distância focal estimada foi da
ordem de 78,8 % ± 9,8 %.
Quando foi utilizado o conjunto de parâmetros de
OI (c, x0, y0, k1, k2) as correlações obtidas entre a
temperatura e todos os parâmetros de OI foram maiores
ou iguais a 73 %.
Em especial, a correlação entre a temperatura e a
distância focal foi da ordem de 90 % no processamento
quando foram considerados os parâmetros (c, x0, y0, k1,
k2) com autocalibração.
De forma geral, foi possível observar que, em
condições térmicas distintas, os parâmetros de OI foram
modificados, alguns mais que outros.
Os resultados obtidos sinalizam que estratégias de
compensação desta variação devem ser consideradas,
principalmente quando as condições térmicas no
momento da calibração são significativamente diferentes
das condições de operação das câmaras.
Os resultados, embora preliminares, não devem ser
generalizados para diferentes câmaras e sistemas e, nestes
casos, sugere-se a realização de testes com este propósito.
Em termos de continuidade deste trabalho
pretende-se realizar processamentos e análises com
imagens obtidas por outras câmaras, e também com a
mesma câmara (em outras épocas), no sentido de avaliar
se o comportamento observado é confirmado.
AGRADECIMENTOS
GALO, M. Calibração e aplicação de câmaras digitais.
1993. 151 p. Dissertação (Mestrado em Ciências Geodésicas),
Universidade Federal do Paraná, Curitiba.
GALO, M.; TOMMASELLI, A. M. G.; HASEGAWA, J. K.;
CAMARGO, P. de O. Significância dos parâmetros de
orientação interior na calibração de câmaras. In: II SIMGEO Simpósio Brasileiro de Ciências Geodésicas e Tecnologias da
Geoinformação, 2008, Recife. p. 1-9.
GÜLCH, E. Calibration of CCD Video Cameras. In.: Proc.
ISPRS Symposium on Progress in Imaging Sensors, Stuttgart,
1986. p. 391-403.
GRAHAM, R.; KOH, A. Digital Aerial Survey: Theory and
Practice. Boca Raton: Whittles Publishing, 2002. 248p. ISBN
1-870325-98-2.
HABIB, A. F.; MORGAN, M. Small format digital cameras
for mapping applications: calibration and stability analysis. In:
MITISHITA, E. A. (Org.). Série em Ciências Geodésicas –
Novos Desenvolvimentos em Ciências Geodésicas - 2003.
Curitiba, 2003, v. 3, p. 3-25. ISBN: 85-88783-04-05.
HABIB, A. F.; MORGAN, M. Stability analysis and geometric
calibration of off-the-shelf digital cameras. Photogrammetric
Engineering & Remote Sensing, Vol. 71, No. 6, June, pp. 733741, 2005.
HABIB, A. F ; PULLIVELLI, A.; MITISHITA, E. A. ;
GHANMA, M. S.; KIM, E. Stability Analysis of Low-Cost
Digital Cameras for Aerial Mapping Using Different
Georeferencing Techniques. Photogrammetric Record, United
Kingdom, v. 21, n. 113, p. 29-43, 2006.
HASSELBLAD Digital Cameras – Hasselblad H1D.
Disponível em <http://www.hasselbladusa.com>, 2004. Acesso
em Março de 2010.
ILMB (Integrated Land Management Bureau) - Base Mapping
and Geomatic Services Branch Small & Medium Format
Digital Camera Specifications, Version 0.11, Canadá, 2007.
Disponível
em:
<http://ilmbwww.gov.bc.ca/bmgs/pba/trim/specs/index.htm#upd
ates> Acesso: 29 Jul., 2007.
Os autores agradecem ao CNPq - Conselho
Nacional de Desenvolvimento Científico e Tecnológico
pelos auxílios nos seguintes projetos: 475932/2003-0,
481047/2004-2, 478782/2009-8 e 312909/2009-8. Além
do CNPq os autores agradecem à Engemap
Geoinformação pelo apoio.
JACOBSEN, K.; WEGMANN, H. Dependencies and problems
of direct sensor orientation. In: C. HEIPKE; K. JACOBSEN; H.
WEGMANN (Eds.), Integrated Sensor Orientation, OEEPE
Official Publication No. 43 Bundesamt für Kartographie und
Geodäsie, Frankfurt am Main, Germany, 2002. pp. 73-84.
REFERÊNCIAS
MERCHANT, D. C. Analytical photogrammetry - theory
and practice, Part I. The Ohio State University, Dept. of
Geodetic Science, 1979.
ANDRADE, J. B. de Fotogrametria. SBEE: Curitiba, 2003.
256 p. (2ª Edição, ISBN 85-86180-28-9)
DÄHLER, J. Problems in digital image acquisition with CCD
cameras. In.: Intercommission Conference on Fast Processing
of Photogrammetric Data, Interlaken, Switzerland, 1987, p.
48-59.
LITWILLER, D. CCD vs. CMOS: Facts and Fiction.
Phothonics Spectra. Laurin Publishing Co. Inc., January, 2001.
MITISHITA, E.; CORTÊS, J. CENTENO, J.; MACHADO,
A. Small-format digital camera: A study into stability analysis
of the interior orientation parameters through temperature
variation. In.: 6th International Symposium on Mobile
Mapping Technology, Presidente Prudente, SP, July 21-24,
2009.
M. Galo, A. M. G. Tommaselli, J. K. Hasegawa, R. da S. Ruy, T. T. dos Reis
III Simpósio Brasileiro de Ciências Geodésicas e Tecnologias da Geoinformação
MONIWA, H. Analytical camera calibration for close-range
photogrammetry. Thesis, New Brunswick, Master of Science,
University of New Brunswick, 104p., 1972.
REISS, M. L. L. Restituição Fotogramétrica Flexível: estudo
de métodos e desenvolvimento de protótipo. 2002. 120 p.
Dissertação
(Mestrado
em
Ciências
Cartográficas),
Universidade Estadual Paulista Júlio de Mesquita Filho,
Presidente Prudente.
RUY, R. da S. Desenvolvimento e validação geométrica de
um sistema para mapeamento com câmaras digitais de
médio formato. 2008. 246 p. Tese, Programa de Pós-Graduação
em Ciências Cartográfica, UNESP – Universidade Estadual
Paulista, Presidente Prudente.
RUY, R. da S.; TOMMASELLI, A. M. G.; GALO, M.;
HASEGAWA, J. K.; REIS, T. T. Evaluation of bundle block
adjustment with additional parameters using images acquired by
SAAPI system. In.: 6th International Symposium on Mobile
Mapping Technology, Presidente Prudente, SP, July 21-24,
2009.
SHORTIS, M. R.; BEYER, H. A.; Sensor technology for
digital photogrammetry and machine vision. ATKINSON, K,
B.(ed.); Close Range Photogrammetry and Machine Vision,
Bristol, Whittle Publishing, Chapter 5, pp. 106-155, 1996.
M. Galo, A. M. G. Tommaselli, J. K. Hasegawa, R. da S. Ruy, T. T. dos Reis
Recife - PE, 27-30 de Julho de 2010
p. 008-008
Baixar