UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS DE CURITIBA
CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA AUTOMAÇÃO
LUIZ HENRIQUE SCHRAMM
LUIZ RODOLFO ANTOCHE
THIAGO CANSELHER
DESENVOLVIMENTO DE UM SISTEMA ELETROPNEUMÁTICO AUTOAJUSTÁVEL ACIONADO POR MICROCONTROLADOR PARA CONTROLE DE
PRESSÃO EM COLCHÕES
TRABALHO DE CONCLUSÃO DE CURSO
CURITIBA
2013
LUIZ HENRIQUE SCHRAMM
LUIZ RODOLFO ANTOCHE
THIAGO CANSELHER
DESENVOLVIMENTO DE UM SISTEMA ELETROPNEUMÁTICO AUTOAJUSTÁVEL ACIONADO POR MICROCONTROLADOR PARA CONTROLE DE
PRESSÃO EM COLCHÕES
Trabalho de Conclusão de Curso de Graduação,
apresentado à disciplina de Trabalho de Conclusão de
Curso 2, do curso de Engenharia Industrial Elétrica –
Ênfase em Automação - DAELT - da Universidade
Tecnológica Federal do Paraná - UTFPR, como requisito
parcial para obtenção do título de Engenheiro Eletricista.
Orientador : Prof. Dr. Percy Nohama
Co-Orientador : Prof. M. Sc. Jorge Assade Leludak
CURITIBA
2013
LUIZ HENRIQUE SCHRAMM
LUIZ RODOLFO ANTOCHE
THIAGO CANSELHER
DESENVOLVIMENTO DE UM SISTEMA ELETROPNEUMÁTICO AUTO-AJUSTÁVEL ACIONADO
POR MICROCONTROLADOR PARA CONTROLE DE PRESSÃO EM COLCHÕES
Este Trabalho de Conclusão de Curso de Graduação foi julgado e aprovado como requisito parcial para
a obtenção do Título de Engenheiro Eletricista, do curso de Engenharia Industrial Elétrica - Automação
do Departamento Acadêmico de Eletrotécnica (DAELT) da Universidade Tecnológica Federal do
Paraná (UTFPR).
Curitiba, 12 de Setembro de 2013.
____________________________________
Prof. Paulo Sergio Walenia, Esp.
Coordenador de Curso
Engenharia Industrial Elétrica – Automação
____________________________________
Profa. Annemarlen Gehrke Castagna, M. Sc.
Coordenadora dos Trabalhos de Conclusão de Curso
de Engenharia Elétrica do DAELT
ORIENTADOR
BANCA EXAMINADORA
_____________________________________
_____________________________________
Percy Nohama, Dr.
Antonio Carlos Pinho, Dr.
Universidade Tecnológica Federal do Paraná
Universidade Tecnológica Federal do Paraná
Orientador
_____________________________________
_____________________________________
José da Silva Maia, M. Sc.
Jorge Assade Leludak, M. Sc.
Universidade Tecnológica Federal do Paraná
Universidade Tecnológica Federal do Paraná
Co-Orientador
_____________________________________
Rosalba da Costa, M. Sc.
Universidade Tecnológica Federal do Paraná
A folha de aprovação assinada encontra-se na Coordenação do Curso de Engenharia Industrial
Elétrica – Automação.
AGRADECIMENTOS
Agradecemos a todos que participaram dessa caminhada, tanto direta como
indiretamente, pois, certamente nos ajudaram na realização deste trabalho. As
sugestões, as críticas, o apoio, o incentivo, o carinho, a dedicação e a amizade de
todos que permaneceram próximos durante este período de nossas vidas.
Primeiro, agradecemos a Deus, o qual esteve sempre junto de nós, por ter
acompanhado todos os nossos passos e nos iluminado nessa caminhada.
Agradecemos a nossos pais, por terem nos apoiado e auxiliando nas mais
diversas tarefas para que pudéssemos seguir com nossa construção. Estamos certos
que seu incentivo, apoio emocional e o amor incondicional foram fundamentais neste
período. Sem eles, não teríamos obtido êxito.
Agradecemos à nosso orientador Prof. Dr. Percy Nohama, por ter nos
concedido a oportunidade de dedicarmos nosso trabalho a tal projeto. Agradecemos
aos ensinamentos adquiridos e as experiências compartilhadas.
Agradecemos à nosso co-orientador Prof. Dr. Jorge Assade Leludak, por seu
incentivo e por seu auxílio na área de acionamentos eletropneumáticos.
Agradecemos a nossos familiares, por terem nos auxiliado, mesmo que
indiretamente, e por terem partilhado dessa difícil caminhada
Agradecemos a nossos colegas de profissão, por seu apoio e por seu
incansável senso crítico para que aprimorássemos nosso trabalho.
Por fim, agradecemos a todos os amigos, por sua ajuda e por sua compreensão
durante os períodos mais trabalhosos.
RESUMO
ANTOCHE, Luiz Rodolfo; CANSELHER, Thiago; SCHRAMM, Luiz Henrique.
Desenvolvimento de um sistema eletropneumático auto-ajustável acionado por
microcontrolador para controle de pressão em colchões. 2013. 137p. Trabalho de
Conclusão de Curso (Graduação) – Curso Superior de Engenharia Industrial Elétrica
– Automação. Universidade Tecnológica Federal do Paraná, Curitiba, 2013.
Neste trabalho, descreve-se um sistema eletropneumático microcontrolado
desenvolvido para o controle de pressão em colchões a ar utilizados para prevenção
de úlcera por pressão. Úlcera por pressão é uma ferida localizada na pele e/ou tecido
subjacente, geralmente próxima a alguma proeminência óssea, como resultado da
pressão prolongada do peso do próprio corpo, atrito, cisalhamento, ou a combinação
desses fatores. Para o desenvolvimento do sistema eletrônico foram utilizados como
componentes, um microcontrolador PIC16f877A, uma fonte ATX, módulos de relés e
um sensor de pressão MPX5010dp. Para o desenvolvimento do sistema
eletropneumático foram utilizadas como componentes, válvulas solenoides 12 V, de
corrente contínua, um compressor de ar 127 V, de corrente alternada, além de um
manômetro aneróide, de 0 – 300 mmHg. O sistema proposto é capaz de controlar a
pressão interna dos colchões, mantendo-a dentro dos limites estabelecidos pelos
profissionais de medicina, entre 12 e 35 mmHg, além de executar padrões dinâmicos
de controle, para alterar pontos de apoio.
Palavras-chave: Úlcera por pressão. Sistema pneumático. Sistema microcontrolado.
Colchões a Ar. Colchões Dinâmicos.
ABSTRACT
ANTOCHE, Luiz Rodolfo; CANSELHER, Thiago; SCHRAMM, Luiz Henrique.
Development of a self-adjustable, microcontroller-driven, electropneumatic system for
pressure control in mattresses. 2013. 137p. Trabalho de Conclusão de Curso
(Engenharia Industrial Elétrica – Automação) – Departamento Acadêmico de
Eletrotécnica, Universidade Tecnológica Federal do Paraná, Curitiba, 2013.
In this report, we describe a microcontrolled electropneumatic system developed for
pressure control in air mattresses used for ulcer pressures prevention. A pressure ulcer
is a wound located in the skin and/or nearby tissue, usually next to a bone prominence,
as the result of pressure generated by the body weight being applied for long periods
of time, friction, shear or the combination of these factors. For developing the electronic
system, components such as PIC16F877A microcontroller, ATX power supply, relay
modules, and a MPX5010DP pressure sensor were used. For developing the
electropneumatic system, were used, as components, 12 V continuous current
solenoid valves, a 127 V alternating current air compressor and a 0-300 mmHg aneroid
pressure gauge. The proposed system was able to control the pressure inside the
mattresses, keeping it in the limits established by health care professionals, between
12 mmHg and 35 mmHg, and also it is able to execute dynamic control patterns,
changing the spots where the body is being supported.
Keywords: Pressure ulcer. Pneumatic System. Microcontrolled system. Air Mattresses.
Dynamic Mattresses.
LISTA DE SIGLAS
A/D
Analógico/Digital (Analogic/Digital)
ATX
Tecnologia Avançada Estendida (Advanced Technology Extended)
CISC
Computador com um Conjunto Complexo de Instruções (Complex
instruction set computing)
CPU
Unidade Central de Processamento (Central Processing Unit)
EPUAP
Comissão Consultiva Européia de Úlceras por Pressão (European
Pressure Ulcer Advisory Panel)
I2C
Protocolo de Comunicação a dois fios (Inter-Integrated Circuit)
I/O
Entrada/Saída (Input/Output)
LCD
Tela de Cristal Líquido (Liquid Crystal Display)
LED
Diodo Emissor de Luz (Light Emitting Diode)
NPUAP
Comissão Consultiva Nacional de Úlceras por Pressão (National
Pressure Ulcer Advisory Panel)
PIC
Controlador
de
Interface
Programável
(Programmable
Interface
Controller)
PWM
Modulador de Largura de Pulso (Pulse width modulation)
RF
Radio Frequência (Radio Frequency)
RISC
Computador com um Conjunto Reduzido de Instruções (Reduced
instruction set computing)
SPI
Interface Periférica Serial (Serial Peripheral Interface)
UP
Úlcera por Pressão
USART
Receptor Transmissor Universal Síncrono Assíncrono
LISTA DE FIGURAS
Figura 1 – Roho - Dry Flotation Mattress Overlay Sections....................................... 15
Figura 2 - Úlcera por pressão. ................................................................................... 21
Figura 3 – Representação do tecido tegumentar. ..................................................... 23
Figura 4 – Pontos de pressão quando deitado de costas. ........................................ 25
Figura 5 – Pontos de pressão quando sentando em uma cadeira. ........................... 25
Figura 6 – Pontos de pressão quando deitado de lado. ............................................ 26
Figura 7 – Onde áreas de pressão se desenvolvem?. .............................................. 26
Figura 8 – Representação de Suspeita de Lesão Tissular Profunda. ....................... 30
Figura 9 – Representação de Úlcera por pressão no estágio I. ................................ 31
Figura 10 – Úlcera por pressão no estágio I.............................................................. 31
Figura 11 – Representação de Úlcera por pressão no estágio II. ............................. 32
Figura 12 – Úlcera por pressão no estágio II............................................................. 32
Figura 13 – Representação de Úlcera por pressão no estágio III. ............................ 33
Figura 14 – Úlcera por pressão no estágio III............................................................ 33
Figura 15 – Representação de Úlcera por pressão no estágio IV. ............................ 34
Figura 16 – Úlcera por pressão no estágio IV ........................................................... 34
Figura 17 – Representação de Úlcera por pressão não classificável. ....................... 35
Figura 18 – BariSelect® Bariatric Mattress Replacement System - The ROHO Group.
.................................................................................................................................. 38
Figura 19 – NWC-6000ET Advanced Kinetic Floatation Therapy da National Wound
Care. ......................................................................................................................... 38
Figura 20 – Squirrel Diamond SDII da Squirrel Medical. ........................................... 39
Figura 21 – SensorCell™ flotation therapy mattress da TheraTorr Medical. ............. 39
Figura 22 – Detalhe das células independentes do SensorCell™ flotation therapy
mattress..................................................................................................................... 40
Figura 23 – Representação básica de um relé. ......................................................... 48
Figura 24 – Fonte ATX AKASA. ................................................................................ 50
Figura 25 – Sensor de Pressão por Membrana com Semicondutor. ......................... 51
Figura 26 – Tipos de Compressores. ........................................................................ 54
Figura 27 – Válvula Globo. ........................................................................................ 57
Figura 28 – Válvula Solenóide de Ação Direta. ......................................................... 58
Figura 29 – Válvula Solenóide Pilotada Internamente............................................... 59
Figura 30 – Diagrama Válvulas Solenóide Duas vias com retorno por mola: ............ 59
Figura 31 – Comparação entre orientação vertical e horizontal de células. .............. 63
Figura 32 – Estrutura do Protótipo & Câmaras Esticadas. ........................................ 65
Figura 33 – Disposição dos Grupos de Bolsões da Estrutura do Protótipo & Câmaras
Esticadas. .................................................................................................................. 66
Figura 34 – Válvula Prolongadora Com Retenção. ................................................... 67
Figura 35 – Válvula 2/2 Vias Thermoval. ................................................................... 68
Figura 36 – Mangueiras de de 10, 8 e 6 mm. ............................................................ 68
Figura 37 – Engates Rápidos para sistemas Pneumáticos – Fabricante BEL AIR.... 69
Figura 38 – Manômetro Aneróide , fabricante P.A. Med. .......................................... 70
Figura 39 – Esquema de montagem do circuito pneumático. ................................... 71
Figura 40 – Sensor de Pressão Motorola MPX2010DP. ........................................... 72
Figura 41 – Sensor de Pressão Motorola MPXM2010GS. ........................................ 72
Figura 42 – Sensor de Pressão Motorola MPX5010DP. ........................................... 73
Figura 43 – Sensor de Pressão Motorola MPX2010GP. ........................................... 73
Figura 44 – Esquemático do Sensor de Pressão MPX5010DP................................. 74
Figura 45 – Tensão de saída Versus a Pressão diferencial Sensor de Pressão
MPX5010DP.............................................................................................................. 74
Figura 46 – Módulo com quatro relés. ....................................................................... 75
Figura 47 – Esquema de ligação do módulo de Relés. ............................................. 75
Figura 48 – GRAFCET para a função calibrate(). ..................................................... 83
Figura 49 – GRAFCET para a função pattern(). ........................................................ 86
Figura 50 – Etapas de acionamento da função pattern(). ......................................... 88
Figura 51 – Sinal de Tensão do Sensor de Pressão & Saída digital para Compressor.
.................................................................................................................................. 94
Figura 52 – Sinal de Tensão do Sensor de Pressão & Saída digital para Compressor
– Tensão mínima e máxima. ..................................................................................... 95
Figura 53 – Sinal de Tensão do Sensor de Pressão & Saída digital para Compressor
– Acionamento da válvula de bypass. ....................................................................... 96
Figura 54 – Sinal de Tensão do Sensor de Pressão & Saída digital para Compressor
– Amplitude da medição. ........................................................................................... 97
Figura 55 – Sinal de Tensão do Sensor de Pressão & Saída digital para Válvula bypass
– Tempo da Válvula Aberta. ...................................................................................... 98
Figura 56 – Sinal de Tensão Válvula de Entrada e Válvula de Saída do conjunto de
bolsões. ..................................................................................................................... 99
Figura 57 – Sinal de Tensão Válvula de Entrada e Válvula de Saída do conjunto de
bolsões – Atraso no acionamento. ............................................................................ 99
Figura 58 – Sinal de Tensão do Sensor de Pressão & Saída digital para Válvula bypass
– função calibrate( ). ................................................................................................ 100
Figura 59 – Sinal de Tensão das Saídas digitais para as Válvulas de entrada e saída.
– função calibrate( ). ................................................................................................ 101
Figura 60 – Sinal de Tensão das Saídas digitais para as Válvulas de entrada e saída
– tempo de medição da pressão. ............................................................................ 102
Figura 61 – Sinal de Tensão das Saídas digitais para as Válvulas de saída e bypass
– função calibrate( ). ................................................................................................ 103
Figura 62 – Sinal de Tensão da entrada do Conversor A/D – Golpe de Aríete, período
de estabilização da pressão. ................................................................................... 104
Figura 63 – Sinal de Tensão da entrada do Conversor A/D – Golpe de Aríete,
amplitude da tensão. ............................................................................................... 104
Figura 64 – Sinal de Tensão da entrada do Conversor A/D – Golpe de Aríete e abertura
da válvula bypass. ................................................................................................... 105
LISTA DE TABELAS
Tabela 1 – Definição das Portas & Pinos do PIC ...................................................... 78
Tabela 2 – Etapas e Transições GRAFCET função Calibrate ( ) .............................. 84
Tabela 3 – Etapas e Transições GRAFCET função Pattern( ) .................................. 87
Tabela 4 – Comparação entre Manômetro e Sensor, medição crescente ................ 91
Tabela 5 – Comparação entre Manômetro e Sensor, medição decrescente ............ 92
LISTA DE QUADROS
Quadro 1 – Escala de Braden para Avaliação do Risco de Úlceras Por Pressão. .... 29
Quadro 2 – Quadro Comparativo entre equipamentos para prevenção de UP. ........ 41
LISTA DE GRÁFICOS
Gráfico 1 – Comparação entre Sensor e Manômetro – Curva Decrescente. ............ 93
Gráfico 2 – Comparação entre Sensor e Manômetro – Curva Crescente. ................ 93
SUMÁRIO
1. INTRODUÇÃO ...................................................................................................... 14
1.1. CONTROLE DE PRESSÃO EM COLCHÕES A AR ......................................... 14
1.2. PROBLEMAS E PREMISSAS .......................................................................... 16
1.3. OBJETIVOS ...................................................................................................... 17
1.3.1. Objetivo Geral ............................................................................................... 17
1.3.2. Objetivos Específicos ................................................................................... 17
1.4. JUSTIFICATIVA ................................................................................................ 17
1.5. PROCEDIMENTOS METODOLÓGICOS ......................................................... 19
1.6. ESTRUTURA DO TRABALHO ......................................................................... 19
2. FUNDAMENTAÇÃO TEÓRICA............................................................................. 21
2.1. ÚLCERAS POR PRESSÃO .............................................................................. 21
2.1.1. Anatomia e Fisiologia da Pele ...................................................................... 22
2.1.2. O Problema da Úlcera por Pressão .............................................................. 23
2.1.3. Causas ......................................................................................................... 24
2.1.4. Estágio.......................................................................................................... 30
2.1.4.1. Suspeita de Lesão Tissular Profunda ......................................................... 30
2.1.4.2. Estágio I...................................................................................................... 31
2.1.4.3. Estágio II..................................................................................................... 32
2.1.4.4. Estágio III.................................................................................................... 33
2.1.4.5. Estágio IV ................................................................................................... 34
2.1.4.6. Úlceras por pressão não classificáveis ....................................................... 35
2.1.5. Formas de Prevenção .................................................................................. 35
2.1.5.1. Métodos de Prevenção ............................................................................... 36
2.2. ELETRÔNICA ................................................................................................... 42
2.2.1. Microcontroladores ....................................................................................... 42
2.2.2. Arquitetura Harvard ...................................................................................... 43
2.2.3. CISC & RISC ................................................................................................ 43
2.2.4. Assembly ...................................................................................................... 44
2.2.5. Linguagem C ................................................................................................ 45
2.2.6. MikroC .......................................................................................................... 45
2.2.7. Proteus ......................................................................................................... 46
2.2.8. Relés Eletromagnéticos ................................................................................ 47
2.2.9. Fontes Chaveadas........................................................................................ 48
2.2.9.1. Fontes ATX................................................................................................. 49
2.2.10. SENSORES DE PRESSÃO ......................................................................... 50
2.3. PNEUMÁTICA .................................................................................................. 52
2.3.1. Fluidos .......................................................................................................... 52
2.3.2. Princípio de Pascal ....................................................................................... 52
2.3.3. Introdução à Pneumática .............................................................................. 53
2.3.4. Ar Comprimido .............................................................................................. 53
2.3.5. Compressor .................................................................................................. 54
2.3.5.1. Deslocamento Positivo ............................................................................... 55
2.3.5.2. Deslocamento Dinâmico ............................................................................. 55
2.3.6. Preparação do Ar Comprimido ..................................................................... 55
2.3.7. Atuadores ..................................................................................................... 56
2.3.8. Cilindros ........................................................................................................ 56
2.3.9. Válvulas ........................................................................................................ 57
2.3.10. Válvula Solenóide ......................................................................................... 57
2.3.10.1. Válvulas Solenóides de Ação Direta........................................................... 58
2.3.10.2. Válvulas Solenóides Pilotadas Internamente.............................................. 58
2.3.10.3. Válvula Solenóide Pilotada Externamente .................................................. 59
2.3.10.4. Válvula Solenóide Duas Vias...................................................................... 59
2.3.10.5. Válvulas Especiais...................................................................................... 60
2.3.10.6. Dimensionamento....................................................................................... 60
2.3.10.7. Tempo de Resposta ................................................................................... 60
2.3.10.8. Ruídos do Solenóide .................................................................................. 61
2.3.10.9. Golpe de Aríete .......................................................................................... 61
3. DESENVOLVIMENTO DO PROTÓTIPO .............................................................. 63
3.1. DESIGN DO COLCHÃO ................................................................................... 63
3.2. SISTEMA PNEUMÁTICO ................................................................................. 67
3.2.1. Compressor .................................................................................................. 67
3.2.2. Válvulas Solenóides 2/2 Vias ....................................................................... 67
3.2.3. Conexões e Mangueiras Pneumáticas ......................................................... 68
3.2.4. Manômetro Aneróide .................................................................................... 69
3.3. DESENVOLVIMENTO DO SISTEMA ELETROPNEUMÁTICO ........................ 70
3.4. SISTEMA ELETRÔNICO .................................................................................. 71
3.4.1. PIC16F877A ................................................................................................. 71
3.4.2. Sensor de Pressão ....................................................................................... 72
3.4.3. Módulo de Relés ........................................................................................... 74
3.4.4. Fonte ATX .................................................................................................... 76
3.4.5. LCD .............................................................................................................. 76
3.4.6. Descrição da Montagem do Circuito ............................................................. 76
3.5. DESENVOLVIMENTO DO FIRMWARE ........................................................... 77
3.6. SIMULAÇÃO ..................................................................................................... 89
4. TESTES E RESULTADOS ................................................................................... 90
4.1. VALIDAÇÃO DO SENSOR MPX5010DP ......................................................... 90
4.2. AQUISIÇÃO DE SINAIS ................................................................................... 94
5. CONCLUSÕES ................................................................................................... 106
REFERÊNCIAS BIBLIOGRÁFICAS ........................................................................ 111
APÊNDICE A........................................................................................................... 119
APÊNDICE B........................................................................................................... 120
APÊNDICE C .......................................................................................................... 121
APÊNDICE D .......................................................................................................... 137
14
1. INTRODUÇÃO
1.1.
CONTROLE DE PRESSÃO EM COLCHÕES A AR
Segundo Fishbein (1966), em qualquer posição, o peso do corpo humano
exerce pressão desigual sobre a superfície da pele. Quando o indivíduo está sentado,
os glúteos, a parte inferior da coluna dorsal, a parte superior dos ossos dos quadris e
as coxas recebem grande parte desta pressão. De acordo com Abreu (2010), a
compressão prolongada dos tecidos vascularizados é o principal fator que faz iniciar
o aparecimento das UPs (úlceras por pressão). Outros fatores como a tensão de
cisalhamento, umidade e temperatura são agravantes dessa condição.
Tecidos do corpo que não estão em sua saúde perfeita podem estar sujeitos à
lesão quando expostos a pressões maiores que 120 ou 150 g/cm2 durante qualquer
período de tempo. Portanto, um homem com aproximadamente 70 kg imobilizado e
com seu peso concentrado em um ponto crítico, obviamente correrá risco de
desenvolvimento da úlcera por pressão (FISHBEIN, 1966).
Segundo Queiroz (2010), além de as UPs causarem sofrimento nos pacientes,
também são portas de entrada para infecções que dificultam a recuperação,
aumentam o tempo e o custo de internação, podendo elevar a taxa de mortalidade.
Krasner (1997) afirma que a úlcera por pressão é um problema relevante na
área de saúde pública, o qual acarreta a perda da qualidade de vida e gera alto custo
para assistência, pois, aumenta a carga de trabalho dos profissionais e o consumo de
recursos materiais em diversos setores do hospital.
Paiva (2008) afirma que “focar o nosso olhar, apenas, na equipe assistencial é
estar perdendo de vista o conjunto de fatores e condições predisponentes inerentes à
complexidade assistencial na qual está inserido o paciente hospitalizado”.
Neste ponto procura-se focar nos meios utilizados para prevenir o
aparecimento desta patologia. Para evitar as úlceras por pressão encontram-se
disponíveis opções de dispositivos que normalmente utilizam de alguma substância
fluida para redistribuir e amenizar a pressão que o corpo exerce sobre uma superfície.
No mercado de produtos para prevenção encontram-se modelos que utilizam
de pressão alternante entre o corpo e o colchão pela insuflação de ar comprimido em
bolsões pneumáticos. O controle da pressão nesses bolsões é geralmente realizado
por algum tipo de sistema eletrônico.
15
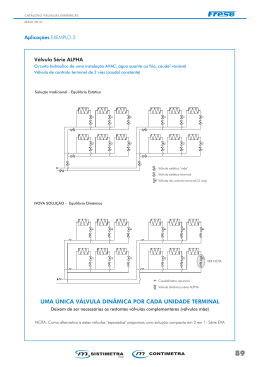
Estes dispositivos garantem também uma sustentação do corpo de maneira
mais confortável. Entre os fluidos utilizados nestas aplicações estão: água, ar ou géis
especiais. Na Figura 1, ilustra-se um colchão de ar para alívio da pressão, produzido
pela Roho Inc..
Figura 1 – Roho - Dry Flotation Mattress Overlay Sections.
Fonte: Healthlinc Medical Equipment (2013).
Francisco Gödke desenvolveu, em seu trabalho "Sistemas dinâmicos para
evitar úlceras de pressão" (2003), um sistema pneumático similar para este propósito,
utilizando componentes industriais em sua implementação. Como sugestão para
futuros trabalhos, o autor aponta melhorias em seu próprio sistema, dentre as quais
se destacam o desenvolvimento de um circuito dedicado de controle bem como o
dimensionamento adequado dos componentes.
Com base nos trabalhos sobre UP consultados, os quais serão posteriormente
apresentados neste trabalho, verificou-se que entre os principais métodos utilizados
em seu tratamento e prevenção, estão a utilização de colchões para distribuição de
pressão ou para alternância dos pontos de apoio. A fim de garantir que a pressão,
sobre a pele, permaneça dentro dos limites, abaixo dos quais não há danos aos
tecidos do corpo. E também, para distribuir o peso sobre diferentes pontos, de modo
que, periodicamente, os pontos de apoio sejam alternados.
O objetivo deste trabalho é desenvolver um sistema de controle dotado destas
duas características. O qual poderá ser utilizado em sistemas com a aplicação
específica tanto para leitos hospitalares e como para homecare.
16
1.2.
PROBLEMAS E PREMISSAS
A úlcera é uma ferida que causa sofrimento e desconforto, os quais podem ser
minimizados utilizando-se da tecnologia adequada. Tanto no tratamento, quanto na
prevenção das úlceras, há um gasto de recursos com a utilização de mão de obra
especializada, a qual executa um trabalho que pode ser parcialmente automatizado.
Pacientes
acamados
necessitam
de
cuidados
e
atenção
especial.
Normalmente sua condição de saúde já é debilitada, isso exige paciência,
compreensão e apoio (INCA, 2010).
A má distribuição de pressão sobre os tecidos, a qual é ocasionada por
dispositivos normalmente estáticos, como colchões à ar, gel ou espumas, é um fator
agravante ao desenvolvimento de úlceras por pressão. Sistemas estáticos,
independentemente de sua constituição, não podem garantir que a pressão aplicada
à todos os pontos esteja dentro dos limites de 12 mmHg e 35 mmHg.
A distribuição de carga, com alternância dos pontos de apoio em sistemas
parcialmente estáticos, os quais dependem da ação do usuário ou de seu cuidador,
demanda um esforço excessivo de quem o opera. Nestes modelos, a periodicidade
das mudanças também é prejudicada, pois, depende de ação humana.
A correta distribuição de carga e alternância periódica dos pontos de apoio
podem auxiliar no tratamento e prevenção destas feridas, isso se realizadas
automaticamente por um sistema dedicado. Neste ponto, busca-se construir um
sistema eletropneumático que realize estas tarefas de forma automática e com
confiabilidade.
17
1.3.
1.3.1.
OBJETIVOS
Objetivo Geral
Desenvolver um sistema eletropneumático auto-ajustável acionado por
microcontrolador para controlar a pressão em colchões a ar e realizar alternância de
pontos de apoio.
1.3.2.
Objetivos Específicos
1)
Definir as características do colchão a ser controlado;
2)
Definir as características do circuito eletropneumático;
3)
Efetuar a montagem do circuito eletropneumático e integrá-lo ao
colchão;
4)
Desenvolver o firmware do sistema eletrônico microcontrolado para
controle de pressão;
5)
Implementar o sistema eletrônico responsável pelo acionamento do
colchão pneumático;
6)
Integrar
o
firmware
desenvolvido
ao
sistema
eletrônico
microcontrolado;
7)
Integrar o sistema eletropneumático ao sistema eletrônico do
microcontrolador;
8)
Avaliar o desempenho do sistema desenvolvido em testes de bancada,
para validação do controle.
1.4.
JUSTIFICATIVA
Segundo Luz, Lopacinski, Fraga e Urban (2010), “apesar dos avanços nos
cuidados em saúde, as úlceras por pressão continuam sendo uma importante causa
de morbidade e mortalidade, com impacto na qualidade de vida do paciente e de seus
familiares, gerando um problema social e econômico”.
Luz et al. (2010) afirmam que “o alívio da pressão é a medida profilática mais
importante e pode ser alcançado por meio do posicionamento adequado do paciente
no leito e do uso de dispositivos redutores da pressão.”
18
Além de poupar a saúde daqueles que já estão debilitados, melhorando a
qualidade de suas vidas, a integração com a tecnologia pode auxiliar o trabalho dos
cuidadores, poupando-lhes esforço.
No âmbito familiar, quando na ausência de especialistas ou enfermeiros, podese auxiliar o cuidador, poupando-o de um desgaste excessivo ao longo do dia devido
às trocas dos pontos de apoio, nos períodos entre as trocas de decúbito. Assim, o
cuidador pode dedicar-se a outras tarefas que exijam mais paciência e menos esforço
físico, estas normalmente relacionadas com o bem estar e a autoestima do acamado.
Outra vantagem é a economia de materiais e equipamentos hospitalares, pois,
com a prevenção das úlceras por pressão é possível evitar as diversas complicações
que viriam a ocorrer em sua presença, o que reduz o consumo e a utilização de
recursos da área da saúde.
Luz et al. (2010) afirmam ainda que o tempo de cicatrização das úlceras podem
variar de 30 a mais de 70 dias, dependendo do seu tamanho e também que se observa
uma escassez de ferramentas para prevenção da patologia a nível nacional como por
exemplo a utilização de colchões que redistribuem a pressão em seus pontos,
diminuindo a chance de se formar novas lesões. Uma vez que a evolução tecnológica
permite a elaboração deste dispositivo de forma prática, torna-se possível criar um
sistema a ser produzido nacionalmente.
Evitando o aparecimento de novas patologias, que demandam tempo para
tratamento, pode-se reduzir a permanência dos pacientes no leito hospitalar e além
de melhorar o bem estar das pessoas que se encontram acamados em suas
residências.
O desenvolvimento de um sistema como o proposto exige conhecimento
multidisciplinar. Com base em estudos realizados na área da saúde é necessário o
uso das ferramentas adequadas e do conhecimento técnico especifico para conclusão
de tal projeto. Segundo Walenia, 2006, “o Engenheiro Industrial Eletricista com ênfase
em Automação é um profissional extremamente flexível e imprescindível em muitos
segmentos industriais”. Estas características tornam este profissional um indivíduo
perfeitamente capacitado a realizar a construção de um equipamento desta natureza.
19
1.5.
PROCEDIMENTOS METODOLÓGICOS
Este trabalho está divido em três partes, das quais a primeira consiste na
pesquisa dos temas que o envolvem, a segunda parte descreve o desenvolvimento
do sistema proposto e a terceira parte apresenta os testes realizados.
A primeira parte está subdividida em três temas, são eles: úlceras por pressão,
eletrônica e pneumática. Utilizando da produção advinda das áreas ligadas a saúde,
introduz-se o conceito de Úlceras por Pressão, descrevendo-se sua formação,
estágios, suas implicações à área de saúde e os métodos de prevenção conhecidos.
O conhecimento destes conceitos é fundamental para definir as características e
funções que o conjunto (colchão e controlador) deve possuir. Nos temas de eletrônica
e pneumática são descritos os softwares, componentes e conceitos aplicados durante
o desenvolvimento do sistema objeto deste trabalho.
Em seguida, estão descritas as características do colchão controlado, do
circuito eletropneumático e do circuito microcontrolador, suas concepções e
montagem. A partir destas características foi desenvolvido, com auxílio de software
específico, o código do firmware gravado no microcontrolador. O refino da
programação deve-se a reiterações realizadas durante a síntese dos circuitos
pneumático e eletrônico.
Por fim, são apresentados as conclusões dos testes realizados sobre o sistema
desenvolvido, a fim de validar o controle utilizado.
1.6.
ESTRUTURA DO TRABALHO
No capítulo 1, Introdução, o objetivo deste estudo é discutido, o problema e as
premissas para o desenvolvimento desta pesquisa, e o método utilizado para obter o
resultado esperado.
No capítulo 2, a revisão bibliográfica, é apresentado um aspecto mais
específico das úlceras, seu aparecimento, tratamento entre outros. Abordada a
questão dos sistemas eletropneumáticos e microcontrolados, funcionamento, suas
aplicações e o modo como são integrados.
No capítulo 3 será descrito o desenvolvimento do sistema integrado.
No capítulo 4, serão apresentados os testes para avaliar seu funcionamento
20
No capítulo 5, apresentar-se-ão as conclusões obtidas com a realização do
trabalho.
Ao final, serão inseridos os apêndices, os anexos e as referências
bibliográficas.
21
2. FUNDAMENTAÇÃO TEÓRICA
2.1.
ÚLCERAS POR PRESSÃO
Segundo o NPUAP (2007), uma úlcera por pressão é definida como “uma ferida
localizada na pele e/ou tecido subjacente, geralmente próxima a alguma proeminência
óssea, como resultado da pressão prolongada do peso do próprio corpo, atrito,
cisalhamento, ou a combinação desses fatores”.
As úlceras por pressão, também denominadas úlceras de decúbito ou úlceras
de compressão, são consideradas feridas crônicas que acometem áreas onde existe
pressão sobre proeminências ósseas, tais como o sacro, ísquio, trocânter, ou menos
frequentemente o calcâneo, região occipital, o dorso do pé, o maléolo e a patela. Tais
feridas podem se desenvolver em 24 h ou levar até cinco dias para se manifestar
(PAIVA, 2008).
A figura 3 apresenta uma úlcera por pressão sem tecido necrótico.
Figura 2 - Úlcera por pressão.
Fonte: Shai e Maibach (2005).
Dentre os termos utilizados para definir úlcera por pressão, estão: escara de
pele e ferida de pressão. No entanto, o termo úlcera por pressão torna-se mais
adequado por descrever a maior influência da pressão exercida sobre os tecidos e
proeminências ósseas como causa das lesões. Desse modo, UP é definida como uma
22
área localizada de necrose devida à pressão no tecido mole por longos períodos, onde
há uma proeminência óssea e uma superfície dura (LIMA & GUERRA, 2011).
Há uma distinção entre os termos escara, úlcera por pressão e úlcera de
decúbito.
Úlcera de Decúbito remete à patologia que surge com pessoas que estão
deitadas, sem considerar casos em que os indivíduos estão sentados. A definição de
escara remete a presença do tecido necrótico (tecido morto) sobre a úlcera, o que não
implica que toda úlcera possua tecido necrótico sobre ela (WADA; TEIXEIRA;
FERREIRA, 2010).
Costa (2003) se refere à formação da úlcera por pressão, como sendo o
resultado da concentração do peso da pessoa em superfície inadequada por longos
períodos.
2.1.1.
Anatomia e Fisiologia da Pele
O tegumento humano, mais conhecido como pele, é o órgão mais extenso do
corpo humano. Este recebe um terço do volume de sangue circulante, representa 15%
do peso corpóreo e possui dois metros quadrados de superfície corpórea em uma
pessoa adulta. Constantemente este é exposto a mudanças de ambiente, isolando os
componentes do organismo do meio externo. Possui várias espessuras conforme sua
localização, bem como sulcos e saliências. Também ocorrem variações quanto à
flexibilidade, elasticidade e rigidez. A pele é composta por três tecidos: epiderme,
derme e hipoderme. Ela tem capacidade de autorregeneração podendo suportar
agressão mecânica e química (BRYANT, 2000).
A camada mais externa chama-se epiderme, camada na qual há ausência de
vasos. A derme, abaixo da epiderme, é a camada mais espessa e está dividida em
outras duas camadas. A chamada Derme papilar, onde se encontram os capilares que
suprem as necessidades de oxigênio e nutrientes da epiderme. E a chamada Derme
reticular, onde há maior presença de vasos sanguíneos, glândulas sebáceas
(secreção de sebo), glândulas sudoríparas (suor) e terminações nervosas (VIEIRA,
2008).
A hipoderme ou camada mais profunda da pele abaixo da derme tem a função
de isolamento térmico, proteção mecânica do organismo a choques externos, assim
como reserva de nutritivos (VIEIRA, 2008).
23
Na figura 2, está representado o tecido tegumentar, sua formação e estruturas
que o compõem.
Figura 3 – Representação do tecido tegumentar.
Fonte: Bear, Connors e Paradiso (2002).
2.1.2.
O Problema da Úlcera por Pressão
As úlceras são sempre incapacitantes. Se prolongadas, são debilitantes e
ocasionalmente podem levar o paciente à morte (DIETRICK, 1958).
Silva (1998) relata que nos E. U. A, em média, 2,1 milhões de pessoas
apresentam úlcera por pressão por ano, equivalendo a um custo hospitalar mensal de
4 a 7 mil dólares por paciente.
Lima e Guerra (2011) afirmam que 1,7 milhões de pessoas desenvolvem UP
anualmente nos Estados Unidos e que os custos com tratamento chegam a US$ 8,5
bilhões ao ano.
O paciente hospitalizado, geralmente, apresenta comprometimento de sua
condição saudável, e necessita de cuidados dirigidos aos problemas de ordem
fisiológica, psíquica, espiritual e social, numa perspectiva integralizada. (PAIVA,
2008).
Considerando os problemas decorrentes das úlceras por pressão, os quais não
são somente fisiológicos, o cálculo dos custos para o tratamento aumenta
consideravelmente.
24
O Manual de Indicadores de Enfermagem (NAGEH, 2006) aponta a incidência
de Úlcera por pressão como um indicador de qualidade baseado na razão entre o
número novos casos de pacientes com úlcera por pressão e o número de pessoas
expostas ao risco de adquirir úlcera em um determinado período, conforme equação
1.
=
Onde,
∙ 100
(1)
é a incidência de úlcera por pressão em porcentagem,
é o número
de novos casos de pacientes com úlceras por pressão em um determinado período e
é o número de pessoas expostas ao risco de desenvolver úlceras por pressão no
mesmo período.
2.1.3.
Causas
A ocorrência de úlceras por pressão está relacionada a três fatores principais:
pressão, fricção e cisalhamento.
A pressão exercida sobre a pele é capaz de interromper o fluxo sanguíneo, Isso
ocorre caso a pressão seja superior a 25 mmHg (VIEIRA, 2008).
Quando o fluxo sanguíneo é interrompido ocorre à chamada isquemia da região
afetada.
Gödke (2003) descreve que devido às pressões hidrostáticas nos capilares
estarem entre 13 a 32 mmHg, um valor considerado baixo, irá ocorrer isquemia
tecidual completa se o corpo for submetido à pressões do mesmo nível da pressão
sanguínea.
A fricção da pele ocorre nas camadas superiores (epiderme e derme), devido
ao atrito entre a epiderme e a superfície de contato, já o cisalhamento ocorre através
da combinação entre os efeitos de pressão e fricção. O cisalhamento pode ocorrer
quando a pessoa é movimentada sobre a cama. O movimento de arrasto pode
movimentar os tecidos próximos e o esqueleto, mas a pele em contato com a cama
permanece estática (VIEIRA, 2008).
Em pacientes idosos, com o passar do tempo, a pele se torna mais seca, menos
elástica. Além disso, a percepção sensorial também se reduz, o paciente percebe de
forma menos sutil a pressão exercida em seu corpo. Estas características fazem com
25
que os idosos estejam mais propensos a ocorrência de úlceras por pressão
(MEDEIROS, 2006).
As regiões mais comuns para o aparecimento das úlceras por pressão estão
presentes nas Figuras 4, 5, 6 e 7. Avaliando-as, percebe-se que na maioria dos pontos
de apoio suscetíveis à ocorrência de úlceras por pressão, encontra-se em
proeminências ósseas.
Figura 4 – Pontos de pressão quando deitado de costas.
Fonte: Pressure Ulcer Basics (2013).
Figura 5 – Pontos de pressão quando sentando em uma cadeira.
Fonte: Pressure Ulcer Basics (2013).
26
Figura 6 – Pontos de pressão quando deitado de lado.
Fonte: Pressure Ulcer Basics (2013).
Figura 7 – Onde áreas de pressão se desenvolvem?.
Fonte: Pressure Ulcer Basics (2013).
O desenvolvimento das úlceras por pressão é favorecido pelo estado
nutricional do paciente. A desnutrição agrava o quadro, pois, dificulta o processo de
27
cicatrização além de causar anemia, o que diminui o transporte de oxigênio pelo
sangue, tornando ainda mais lenta a recuperação tecidual (MEDEIROS, 2006).
Para elaborar uma ferramenta na qual os enfermeiros pudessem apontar
pacientes mais susceptíveis à ocorrência das UPs de forma objetiva, cientistas e
pesquisadores desenvolveram escalas de risco. Estas escalas permitem prever o
risco que um determinado indivíduo tem de ser acometido por esta enfermidade. Uma
das mais famosas e mais utilizada é a Escala de Braden (BRADEN, et al., 1987).
A escala de Braden aborda seis aspectos diferentes, citam-se: a percepção
sensorial, a umidade, a atividade física, a nutrição, a fricção e o cisalhamento. Cada
aspecto é graduado de 1 à 4, exceto fricção e cisalhamento, que estão graduados de
1 à 3. Sua pontuação varia de 6 à 23. Qualquer número menor ou igual a 16 pode ser
um forte indicativo de que o paciente se enquadra no grupo de risco.
A Escala de Braden está representada no quadro número 1. A primeira coluna
apresenta os itens sobre avaliação. As demais colunas apresentam a descrição do
estado do paciente e a relacionam com uma pontuação.
Percepção
1. Completamente
2. Muito limitada:
3. Ligeiramente
4. Nenhuma
Sensorial
limitada:
Reage unicamente a
limitada:
limitação:
Capacidade de
Não reage a
estímulos dolorosos.
Obedece a instruções
Obedece a
reação
estímulos dolorosos
Não consegue
verbais, mas nem
instruções verbais.
significativa ao
(não geme, não se
comunicar o
sempre consegue
Não apresenta
desconforto
retrai nem se agarra
desconforto, exceto
comunicar o
déficit sensorial
a nada) devido a um
através de gemidos
desconforto ou a
que possa limitar a
nível reduzido de
ou inquietação,
necessidade de ser
capacidade de
consciência ou à
OU
mudado de posição,
sentir ou exprimir
sedação,
Tem uma limitação
OU
dor ou
OU
sensorial que lhe
Tem alguma limitação
desconforto.
Capacidade limitada
reduz a capacidade
sensorial que lhe
de sentir a dor na
de sentir dor ou
reduz a capacidade
maior parte do seu
desconforto em mais
de sentir dor ou
corpo.
de metade do corpo.
desconforto em 1 ou
2 extremidades.
28
Umidade
1. Pele
2. Pele muito úmida:
3. Pele
4. Pele raramente
Nível de
constantemente
A pele está
ocasionalmente
úmida:
exposição
úmida:
frequentemente, mas
úmida:
A pele está
da pele à
A pele mantém-se
nem sempre, úmida.
A pele está por vezes
geralmente seca; os
umidade
sempre úmida devido
Os lençóis têm de ser
úmida, exigindo uma
lençóis só têm de
à sudorese, urina,
mudados pelo menos
muda adicional de
ser mudados nos
etc. É detectada
uma vez por turno.
lençóis
intervalos habituais.
umidade sempre que
aproximadamente
o doente é deslocado
uma vez por dia.
ou virado.
Atividade
1. Acamado:
2. Sentado:
3. Anda
Nível de
O doente está
Capacidade de
ocasionalmente:
frequentemente:
atividade
confinado à cama.
marcha gravemente
Por vezes caminha
Anda fora do quarto
limitada ou
durante o dia, mas
pelo menos duas
inexistente. Não pode
apenas curtas
vezes por dia, e
fazer carga e/ou tem
distâncias, com ou
dentro do quarto
de ser ajudado a
sem ajuda. Passa a
pelo menos de
sentar-se na cadeira
maior parte dos
duas em duas
normal ou de rodas.
turnos deitado ou
horas durante o
sentado.
período em que
física
4. Anda
está acordado.
Nutrição
1. Muito pobre:
2. Provavelmente
3. Adequada:
4. Excelente:
Alimentação
Nunca come uma
inadequada:
Come mais de
Come a maior
habitual
refeição completa.
Raramente come
metade da maior
parte das refeições
Raramente come
uma refeição
parte das refeições.
na íntegra. Nunca
mais de 1/3 da
completa e
Faz quatro refeições
recusa uma
comida que lhe é
geralmente come
diárias de proteínas
refeição. Faz
oferecida. Come
apenas cerca de 1/2
(carne, peixe,
geralmente um
diariamente duas
da comida que lhe é
lacticínios). Por
total de quatro ou
refeições, ou menos,
oferecida. A ingestão
vezes recusa uma
mais refeições
de proteínas (carne
de proteínas
refeição, mas toma
(carne, peixe,
ou lacticínios).
consiste unicamente
geralmente um
lacticínios). Come
Ingere poucos
em três refeições
suplemento caso
ocasionalmente
líquidos. Não toma
diárias de carne ou
lhe seja oferecido,
entre as refeições.
um suplemento
lacticínios.
OU É alimentado
Não requer
dietético líquido, OU
Ocasionalmente
por sonda ou num
suplementos.
Está em jejum e/ou
toma um suplemento
regime de nutrição
a dieta líquida ou a
dietético, OU
parenteral total
soros durante mais
Recebe menos do
satisfazendo
de cinco dias.
que a quantidade
provavelmente a
ideal de líquidos ou
maior parte das
alimentos por sonda.
necessidades
nutricionais.
29
Mobilidade
1.
2. Muito limitada:
3. Ligeiramente
4. Nenhuma
Capacidade
Completamente
Ocasionalmente
limitado:
limitação:
de alterar e
imobilizado:
muda ligeiramente
Faz pequenas e
Faz grandes ou
controlar a
Não faz qualquer
a posição do corpo
frequentes
frequentes
posição do
movimento com
ou das
alterações de
alterações de
corpo
o corpo ou
extremidades, mas
posição do
posição do corpo
extremidades
não é capaz de
corpo e das
sem ajuda.
sem ajuda.
fazer mudanças
extremidades
frequentes ou
sem ajuda.
significativas
sozinho.
Fricção e
1. Problema:
2. Problema
3. Nenhum
forças de
Requer uma
potencial:
problema:
deslizamento
ajuda moderada a
Movimenta-se com
Move-se na cama
máxima para se
alguma dificuldade
e na cadeira sem
movimentar. É
ou requer uma ajuda
ajuda e tem força
impossível
mínima. É provável
muscular
levantar o doente
que, durante uma
suficiente para se
completamente
movimentação, a
levantar
sem deslizar
pele deslize de
completamente
contra os lençóis.
alguma forma contra
durante uma
Descai
os lençóis, cadeira,
mudança de
frequentemente
apoios ou outros
posição.
na cama ou
dispositivos. A maior
Mantém uma
cadeira, exigindo
parte do tempo
correta posição
um
mantém uma posição
na cama ou
reposicionamento
relativamente boa na
cadeira.
constante com
cama ou na cadeira,
ajuda máxima.
mas ocasionalmente
Espasticidade,
descai.
contraturas ou
agitação leva a
fricção quase
constante.
Nota: Quanto mais baixa a pontuação, maior será o potencial para desenvolver uma úlcera por pressão.
Quadro 1 – Escala de Braden para Avaliação do Risco de Úlceras Por Pressão.
Fonte: ICE – Investigação Científica em Enfermagem (2001).
30
2.1.4.
Estágio
De acordo com o Guia Rápido desenvolvido em parceria entre EPUAP
(European Pressure Ulcer Advisory Panel) e NPUAP (American National Pressure
Ulcer Advisory Panel) úlceras por pressão são classificadas em quatro estágios
principais e outros dois normalmente classificados como parte do quarto estágio
(EPUAP & NPUAP, 2009).
2.1.4.1. Suspeita de Lesão Tissular Profunda
Área com coloração roxa ou marrom de pele intacta ou com bolha de sangue
devido a dano ao tecido mole decorrente de pressão ou cisalhamento, figura 8. Como
descrição adicional, a área pode ser precedida por um tecido que se apresenta
dolorido, endurecido, amolecido, esponjoso e mais quente ou frio comparativamente
ao tecido adjacente. A lesão tissular profunda pode ser de difícil detecção em
indivíduos com pele de tonalidades mais escuras. A ferida pode evoluir e ficar coberta
de uma fina escara. Sua evolução pode ser rápida expondo outras camadas de tecido
mesmo com tratamento. (EPUAP & NPUAP, 2009).
Figura 8 – Representação de Suspeita de Lesão
Tissular Profunda.
Fonte: NPUAP (2007).
31
2.1.4.2. Estágio I
Área de pele intacta com hiperemia (aumento da quantidade de sangue circulante num
determinado local) que não embranquece, figuras 9 e 10. Como descrição adicional o
estágio I pode ser de difícil detecção em indivíduos com pele de tonalidades mais
escuras. A área pode ser dolorida, firme, macia, quente ou mais fria em relação às
regiões adjacentes. (EPUAP & NPUAP, 2009).
Figura 9 – Representação de Úlcera por pressão
no estágio I.
Fonte: NPUAP (2007).
Figura 10 – Úlcera por pressão no estágio I.
Fonte: Shai e Maibach (2005).
32
2.1.4.3. Estágio II
Perda parcial da espessura da derme apresentando uma úlcera rasa de
coloração vermelha sem esfacelamento, figuras 11 e 12. Este estágio não deve ser
utilizado para descrever rasgos na pele. (EPUAP & NPUAP, 2009).
Figura 11 – Representação de Úlcera por
pressão no estágio II.
Fonte: NPUAP (2007).
Figura 12 – Úlcera por pressão no estágio II.
Fonte: Shai e Maibach (2005).
33
2.1.4.4. Estágio III
Perda total da espessura de tecido, figuras 13 e 14. A hipoderme pode estar
visível sem a exposição de ossos, tendões ou músculos. Algum esfacelamento pode
estar presente. Pode variar dependendo da anatomia do local da lesão, podendo
apresentar escavações ou descolamentos. (EPUAP & NPUAP, 2009).
Figura 13 – Representação de Úlcera por
pressão no estágio III.
Fonte: NPUAP (2007).
Figura 14 – Úlcera por pressão no estágio III.
Fonte: Shai e Maibach (2005).
34
2.1.4.5. Estágio IV
Perda total de espessura de tecido com a exposição de ossos, tendões ou
músculos, figuras 15 e 16. Algum esfacelamento pode estar presente. Pode variar
dependendo da anatomia do local da lesão, pode apresentar escavações ou
descolamentos. Podem se estender para músculos ou estruturas de suporte, fazendo
com que osteíte (inflamação óssea) e osteomielite possam ocorrer. (EPUAP &
NPUAP, 2009).
Figura 15 – Representação de Úlcera por
pressão no estágio IV.
Fonte: NPUAP (2007).
Figura 16 – Úlcera por pressão no estágio IV
Fonte: Shai e Maibach (2005).
35
2.1.4.6. Úlceras por pressão não classificáveis
Perda total de espessura de tecido na qual o leito da lesão está coberto por esfacelo
(amarelo, castanho, cinza, esverdeado ou marrom) ou por escara, figura 17. Como
descrição adicional, até que todo o esfacelo ou escara sejam removidos para expor a
base da lesão, a verdadeira profundidade da ferida não pode ser determinada.
Figura 17 – Representação de Úlcera por pressão não classificável.
Fonte: NPUAP (2007).
2.1.5.
Formas de Prevenção
Segundo o dicionário Larousse (2004), prevenção significa “ato ou efeito de
prevenir-se” e prevenir é definido como “dispor previamente; preparar; adiantar-se,
antecipar-se a; dispor de modo que se evite dano ou erro”. A prevenção se mostra
como a medida essencial mais importante que as formas de tratamento.
Goulart et al. (2008), afirmam que a prevenção da úlcera por pressão possuí
custo reduzido comparado ao tratamento, além de manter o paciente pouco tempo no
hospital, deixando-o menos exposto à infecções, por isso, deve-se dar prioridade à
36
prevenção dos pacientes, evitando assim complicações futuras com o tratamento
desta condição.
A Agency for Health Care Research and Quality (AHCRQ), órgão americano,
adotou algumas diretrizes práticas a fim de prever o aparecimento de UPs em adultos.
Basicamente, estas diretrizes consistem em: avaliação de risco, cuidados com a pele
e tratamento precoce, alívio da pressão / redução de carga sobre o corpo do paciente
e o uso de superfícies de suporte adequadas (VIEIRA, 2008).
De acordo com o NPUAP (2007), todos aqueles indivíduos acamados,
cadeirantes ou com capacidade de reposicionamento comprometido devem ser
considerados como estando no grupo de risco para úlceras por pressão.
2.1.5.1. Métodos de Prevenção
Vieira et al. (2008) e NPUAP (2007) descrevem os principais métodos utilizados
para a prevenção. Em sua maioria estão relacionados ao alívio da carga de pressão
ou redução da carga mecânica com a utilização de superfícies de suporte. Citam-se
como soluções (VIEIRA, 2008):
•
Pelo menos a cada duas horas, realizar o reposicionamento das
pessoas que estão restritas ao leito. E pessoas restritas à cadeira de
rodas, de hora em hora;
•
Usar uma escala de horário de reposicionamento por escrito para
documentar o reposicionamento do paciente;
•
Utilizar de travesseiros ou cunhas de espuma para evitar o contato entre
proeminências ósseas. Além de aliviar completamente a pressão dos
tornozelos ou proeminências ósseas dos pés. Elevar em 30° se o
paciente estiver em decúbito lateral, evitando, assim, a pressão direta
no trocânter. Não se devem utilizar almofadas em forma de roda;
•
Pacientes em risco não devem permanecer em colchões padrão e sim
em colchões que possam reduzir a pressão. Em um estudo, pacientes
de uma UTI foram mantidos em colchões de ar e desenvolveram menos
UP do que os pacientes mantidos com colchões padrão.
Superfícies de suporte para redução de pressão podem ser caracterizadas
considerando o modo como agem em relação ao excesso de pressão, sua natureza
(estática ou dinâmica) e ao tipo de equipamento utilizado (VIEIRA, 2008).
37
Existem equipamentos utilizados para redistribuir a pressão para uma área
mais ampla, sem acabar a necessidade de trocas de posição periódicas. Mas também
existem os equipamentos que reduzem a pressão para níveis de pressão dentro dos
limites de fechamento dos capilares, os quais são utilizados em pacientes que não
podem ser movimentados.
O
tipo
de
equipamento
está
dividido
entre:
colchonetes,
colchões
especializados e camas especializadas. Colchonetes geralmente são feitos de
espuma, ar, gel, água ou uma combinação. Colchões especializados são destinados
a reduzir a pressão. As camas especiais substituem os leitos hospitalares comuns e
necessitam de energia elétrica para funcionamento. Equipamentos dinâmicos, por
exemplo, são aqueles capazes de alterar a pressão exercida entre o contato de sua
superfície com os tecidos do corpo, utilizando para este propósito energia elétrica. Já
equipamentos de superfície estática reduzem a pressão somente redistribuindo a
carga do peso do próprio paciente sobre uma maior área (VIEIRA, 2008).
Atualmente, no mercado, existe uma vasta gama de produtos destinados à
prevenção das úlceras por pressão. Um rápido levantamento leva à conclusão de que
a maioria dos produtos é estática, ou seja, não conta com nenhum tipo de sistema que
permita a troca automática dos pontos de pressão no corpo do paciente acamado.
Dentre as opções de produtos que fornecem mudança dinâmica na pressão,
destacam-se alguns fabricantes apresentados aqui.
Desde 1973, The ROHO Group, uma empresa americana fundada por um
engenheiro eletricista chamado Robert H. Graebe que, preocupado com encontrar
uma forma de prevenir úlceras por pressão depois de trabalhar em um projeto num
hospital, vem fabricando tecnologias que busquem reduzir a incidência desta condição
tanto em pacientes acamados quanto em cadeirantes.
Um dos sistemas de mudança de pressão dinâmica mais avançados da ROHO
é o BariSelect® Bariatric Mattress Replacement System que consiste em um colchão
bariátrico de baixa perda de ar controlado por microprocessador, figura 18. Possui
bolsões de ar que alternam inflando e desinflando, de acordo com uma programação
selecionável por um painel de controle. Sendo silencioso, portátil e de baixo consumo
de energia, este equipamento se mostra muito eficaz na prevenção de úlceras por
pressão.
38
Figura 18 – BariSelect® Bariatric Mattress Replacement
System - The ROHO Group.
Fonte: ROHO GROUP (2013).
Da mesma forma, a National Wound Care, outra empresa estadunidense
trabalha desde 1992 no ramo de equipamentos de cuidados para feridas, possuindo
alguns dos produtos mais sofisticados do mercado.
Figura 19 – NWC-6000ET Advanced Kinetic
Floatation Therapy da National Wound Care.
Fonte: NATIONAL WOUND CARE (2013).
A figura 19 apresenta o produto mais avançado da National Wound Care é o
NWC-6000ET Advanced Kinetic Floatation Therapy, uma superfície de suporte com
baixa perda de ar, composta de 20 bolsões de uretano, que opera com pressões
39
abaixo da pressão de obstrução capilar, produzindo movimento para melhorar a
circulação. A partir de sua interface de comando simples, é possível ajustar a pressão
em 6 regiões diferentes do corpo do paciente, bem como selecionar 4 padrões
diferentes de operação de alternância dos bolsões.
Figura 20 – Squirrel Diamond SDII da Squirrel Medical.
Fonte: SQUIRREL MEDICAL (2013).
Já a Squirrel Medical é uma empresa britânica e se especializou em
desenvolver e fabricar dispositivos de alívio da pressão, que ajudam na prevenção e
tratamento de úlceras por pressão. Um produto de destaque da Squirrel Medical é o
Squirrel Diamond SDII que além de totalmente configurável, é compatível com a
maioria das macas hospitalares, eficiente no tratamento de úlceras por pressão nível
IV, diminuindo dores musculares e ósseas, realizando movimentos mínimos que não
incomodam o paciente, figura 20.
Figura 21 – SensorCell™ flotation therapy
mattress da TheraTorr Medical.
Fonte: TheraTorr Medical (2013).
40
A TheraTorr Medical é outra fabricante americana de produtos voltados para a
área de tecnologia biomédica. Entre os produtos a serem utilizados para a prevenção
das úlceras por pressão o SensorCell™ flotation therapy mattress, que além de
apresentar todas as características dos produtos similares fabricados por seus
concorrentes,
possui células
infláveis
que
mantém
uma
mesma
pressão
independentemente do quanto são comprimidas, figuras 21 e 22.
Figura 22 – Detalhe das células independentes do SensorCell™
flotation therapy mattress.
Fonte: TheraTorr Medical (2013).
O quadro 2 apresenta dados para realizar uma comparação entre os tipos de
equipamentos utilizados para prevenir e tratar as úlceras por pressão.
41
Tipo
Estático
Superfície
Descrição
Vantagem
Desvantagem
Colchão de
Colchão revestido ou
espuma
enchimento de espuma.
Colchão
d’água
Custo baixo, fácil de transportar.
Pode ser difícil de limpar
Colchão com enchimento
Redistribuição de pressão secundária à
Difícil de manter, pesado, difícil
Pacientes que podem alternar de
d’água.
imersão em superfície de água.
de transportar. Risco de furar
posição, sem úlcera por pressão.
Fuga de ar, e risco de
Pacientes que podem alternar de
esvaziamento instantâneo.
posição, sem úlcera por pressão,
Requer regulagem frequente
ou com úlcera em estágio inicial.
Baixo custo, fácil de transportar e
Colchão com
Colchão de plástico inflável
guardar, redistribuição de pressão
flutuação de ar
ou revestido de nylon.
secundária a imersão em superfície de
ar.
Cama/ colchão
de baixa perda
de ar
Colchão de
Dinâmico
pressão de ar
alternado
Estrutura de múltiplas
almofadas infláveis que
Leve, redistribui a pressão via imersão
Custo elevado, aquece, risco de
podem ser anexadas à
nos compartimentos de ar.
esvaziamento instantâneo.
cama
Múltiplos
compartimentos
cheios de ar. Os níveis de
pressão flutuam dentro e
entre os compartimentos.
Leve, redistribui a pressão via imersão
nos compartimentos de ar, alternando os
níveis de pressão.
Contém contas (pérolas)
Cama/colchão
de ar fluidizado
Câmara
Bariátrica
barulhento, complexo para uso
e risco de esvaziamento
instantâneo.
Pacientes que podem alternar de
posição, sem úlcera por pressão.
Pacientes dependentes com
úlceras grandes, profundas ou
múltiplas úlceras.
Pacientes dependentes com
úlceras grandes, profundas ou
múltiplas úlceras.
Custo bastante elevado,
que são instáveis e
Fezes e urina passam através do lençol,
barulhento, aqueça muito,
Pacientes dependentes com
pressurizadas com
entre as contas. Desnecessária as
causando aumento nas perdas
úlceras grandes, profundas ou
correntes de ar aquecido.
mudanças frequentes de posição.
insensíveis de água.Diminui a
múltiplas úlceras.
Coberto com polyester.
Bariátrico
Custo elevado, aquece,
Indicações
Para pacientes acima de
150 kg. Pode ser estático ou
dinâmico.
mobilidade do paciente.
Desenhado para se ajustar ao peso e
formato do corpo.
Quadro 2 – Quadro Comparativo entre equipamentos para prevenção de UP.
Fonte: Registered Nurses’ Association of Ontario (2005).
Custo e disponibilidade
Para pacientes acima de 150 kg
até 475kg
42
2.2.
2.2.1.
ELETRÔNICA
Microcontroladores
Segundo Zanco (2005), um microprocessador é uma CPU (Central Processing
Unit) de pequeno porte, capaz de executar um conjunto de tarefas denominadas
instruções.
Uma operação elementar capaz de ser executada pela máquina (CPU) é chamada
de instrução (CUNHA).
Em 1971, a empresa Intel Corporation desenvolveu o primeiro microprocessador
conhecido como 4004 a fim de reduzir e simplificar outros circuitos (ZANCO, 2005).
Assim para melhorar o sistema de processamento de dados com estes dispositivos,
foi desenvolvido um componente baseado na arquitetura do microprocessador que possui
um núcleo de processamento e respectivos periféricos utilizados fisicamente em uma
única unidade. Este componente ficou conhecido como microcontrolador. (CASARE,
2001)
Devido a sua relação custo benefício favorável, microcontroladores são aplicados
em diversos projetos de eletrônica. Substituem um conjunto maior de componentes
eletrônicos digitais, sendo possível minimizar consideravelmente o projeto final. O
microcontrolador ocupa menos espaço físico e é eletronicamente mais eficiente e prático,
pois, é operado por um código nele programado. Sua existência é essencial para
desenvolvimento de novos produtos, pois é possível baratear custos e trazer diversas
facilidades para os usuários. (CASARE, 2001)
Desde a década de 1980, a Intel Corporation vem fabricando microcontroladores
da família 8051, a partir da qual outros modelos de microcontroladores foram criados, com
inúmeras vantagens e novos periféricos. A Microchip Technology desenvolveu o PIC
(Peripheral Interface Controller), um modelo de microcontrolador que apresenta uma
arquitetura com conjunto de instruções reduzido. A grande quantidade de empresas
fabricantes de microcontroladores permite que projetistas escolham os modelos com as
características que mais lhe convierem (ZANCO, 2005).
43
Algumas das características disponíveis em microcontroladores atualmente são
(ZANCO, 2005): USART, comparadores, conversores A/D, PWM, oscilador interno,
modulador RF, interface SPI e interface I2C. Algumas destas características estão
apresentadas neste trabalho, como parte constituinte da solução desenvolvida.
2.2.2.
Arquitetura Harvard
Existem duas arquiteturas internas de máquinas que se aplicam aos
microcontroladores: a arquitetura Harvard e a arquitetura Von-Neumann. As famílias PIC
utilizam a primeira arquitetura e a maior parte dos outros microcontroladores apresenta a
segunda. A diferença fundamental, entre as duas, é notada na forma como os dados são
processados no dispositivo: Na arquitetura Von-Neumann, existe apenas um barramento
interno no qual são enviadas as instruções de dados. Por outro lado, na arquitetura
Harvard, observam-se dois barramentos internos, sendo um exclusivamente usado para
envio de dados e o outro para o envio de instruções. A arquitetura Harvard permite que
durante a execução de uma instrução, outra instrução possa ser encontrada para a
próxima execução (SOUZA, 2001).
2.2.3.
CISC & RISC
CPUs de dispositivos baseadas na arquitetura Von-Neumann são do tipo CISC
(Complex Instruction Set Computer), por possuírem um conjunto de instruções bastante
grande. Já dispositivos baseados na arquitetura Harvard, tem seu CPU do tipo RISC
(Reduced Instruction Set Computer), contando com um conjunto bem menor de instruções
(ZANCO, 2005).
OPCODE, ou código de operação (operational code), representa a sequência de
bytes que designa ou identifica cada instrução (ZELENOVSKY, Ricardo, 2005).
Por não haver muito espaço de memória para o código de instrução dentro da
palavra do OPCODE, os microcontroladores PIC fazem uso da tecnologia RISC, o que
implica que esta família possui um conjunto de cerca de somente 35 instruções, diferindo
da maioria dos outros microcontroladores CISC que contam com mais de 100 instruções.
44
Apesar de mais simples de se aprender, um conjunto de instruções reduzido necessita de
um código mais complexo para se implementar funções que não estão inclusas de fábrica
(SOUZA, 2001).
A arquitetura de um microcontrolador Microchip PIC16f877A, comumente utilizado
para projetos eletrônicos, apresenta a disponibilidade 5 portas de controle, 3 delas
contendo 8 bits, uma delas contendo somente 6 e uma última contendo 3, totalizando 33
entradas ou saídas. O diagrama também aponta algumas das funções disponíveis neste
componente como 3 timers, 8 conversores A/D de 10 bits, comunicação via porta serial,
PWM, entre outros.
A ampla variedade de bits de controle, somada às diversas funcionalidades,
combinada com a praticidade de programação da CPU RISC faz da família PIC16f877
uma família muito popular entre projetistas, sendo capaz de comandar sistemas
eletrônicos relativamente mais complexos.
Para se comandar sistemas eletrônicos apropriadamente a partir de qualquer
microcontrolador, existe a necessidade de programar comandos dentro deste
componente. Esta tarefa pode ser feita em ambientes de desenvolvimento dedicados,
utilizando várias linguagens de programação, sendo as mais corriqueiramente utilizadas
o assembly ou o C.
2.2.4.
Assembly
A primeira linguagem de programação a surgir na área de eletrônica foi a linguagem
Assembly. Esta linguagem é constituída por mnemônicos e cada um deles está ligado a
um código hexadecimal que representa uma instrução de máquina. Cada cada grupo de
microprocessadores e microcontroladores possui um conjunto de mnemônicos diferente,
ficando a critério do fabricante destes dispositivos, definir qual será o padrão utilizado para
criar o conjunto de códigos. Esta linguagem pode ser classificada como linguagem de
baixo nível, pois, exige o desenvolvimento rotinas mais complexas para controles eficiente
(CASARE, 2001).
45
2.2.5.
Linguagem C
No início dos anos 1970, Dennis Ritchie, do Bell Laboratories, trabalhava para
desenvolver um sistema operacional Unix. Para isso, Ritchie precisava de uma linguagem
que fosse concisa, que produzisse programas compactos, rápidos e que pudesse
controlar o hardware com eficiência. Tradicionalmente programadores encontram esses
requisitos utilizando a linguagem assembly, que é intimamente ligada à linguagem interna
da máquina. Entretanto, a linguagem assembly é uma linguagem de baixo nível, ou seja,
é específica para um processador em particular. Então, se for necessário mover um
programa em assembly para diferentes tipos de computadores, é possível que seja
necessário reescrever completamente o programa, usando uma linguagem assembly
diferente (PRATA, 2005).
O Unix era projetado para trabalhar em uma variedade de tipos de computadores
ou plataformas. Isto sugeria usar uma linguagem de alto nível. Uma linguagem de alto
nível é orientada à solução de problemas ao invés de ser orientada à um hardware
específico. Programas especiais chamados compiladores traduzem uma linguagem de
alto nível para a linguagem interna de um computador em particular. Dessa forma, é
possível utilizar o mesmo programa escrito em uma linguagem de alto nível em diferentes
plataformas, usando um compilador em separado para cada plataforma. Ritchie queria
uma linguagem que combinasse a eficiência de uma linguagem baixo nível e acesso ao
hardware com a generalidade e portabilidade de uma linguagem alto nível. Então, a partir
de linguagens mais antigas, Dennis Ritchie criou o a linguagem C (PRATA, 2005).
2.2.6.
MikroC
Para que um código em C contendo as instruções do microcontrolador possa ser
criado adequadamente faz-se necessário um ambiente de desenvolvimento e um
compilador.
O MikroC é um ambiente de desenvolvimento integrado que conta com um
compilador próprio disponibilizado pela empresa Mikroelektronika. Esta é uma ferramenta
poderosa,
bastante
requisitada
para
o
desenvolvimento
de
códigos
para
46
microcontroladores, sendo compatível com a maioria dos dispositivos da família PIC
Conta com diversas funcionalidades como um editor de código avançado, uma grande
quantidade de bibliotecas para programação de determinados periféricos, um monitor de
variáveis e um gerador de códigos em assembly a partir do código em C
(MIKROELEKTRONIKA).
Uma das propriedades mais relevantes deste software é a capacidade de
otimização de código, quando convertendo códigos em C para códigos assembly. Isto se
mostra de vital importância, porque um código em assembly mal formulado pode implicar
performance reduzida (MIKROELEKTRONIKA).
Depois de todo o código ser otimizado, um compilador converte a linguagem
assembly em linguagem hexadecimal, que é compreendida pelo microcontrolador. Desta
forma o programa pode ser gravado neste componente eletrônico.
2.2.7.
Proteus
Durante o desenvolvendo do programa, que irá comandar um microcontrolador, há
sempre a necessidade de gravar novas versões, a fim de corrigir um mal funcionamento
da planta controlada. Essas gravações normalmente apresentam pequenas alterações,
em relação a versão anterior, até o momento em que a operação do microcontrolador se
mostre satisfatória. Entretanto, o processo de gravação, por vezes se revela maçante,
consumindo tempo do programador. A fim de poupar esses diversos processos de
gravação, existe a alternativa de usar um software de simulação de circuitos que seja
capaz de interpretar os códigos hexadecimais do microcontrolador e apresenta-los em um
ambiente virtual.
O Proteus Design Suite é um software com a capacidade de combinar simulação
de circuitos integrados, componentes animados e modelos de microprocessadores e
microcontroladores para facilitar a co-simulação completa de montagens baseadas em
microcontrolador. É possível desenvolver e testar estas montagens antes que um
protótipo físico seja construído (LABCENTER).
No ambiente virtual, é possível interagir com a montagem, utilizando de indicadores
como LED’s, displays de LCD e atuadores como interruptores e botões. O software
47
também possui diversas ferramentas de debug. São ferramentas utilizadas para auxiliar
na detecção de erros ou problemas no código desenvolvido como, por exemplo, acesso
às variáveis do código assembly ou de um código de alto nível (como o código em C)
(LABCENTER).
O principal componente do Proteus é o simulador de circuitos integrados, que utiliza
um núcleo de simulação eficiente. Com seu uso é possível simular diversos circuitos
integrados de inúmeros fabricantes.
Além disso, o software conta com um número grande de instrumentos virtuais
incluindo osciloscópios, analisadores lógicos, geradores de funções, contadores de tempo
e terminais virtuais, assim como amperímetros e voltímetros.
No ambiente virtual é possível simular o código gravado no microcontrolador
exatamente como na vida real, sendo possível observar a mudança de níveis lógicos nos
componentes de acordo com os comandos executados pelo código. O software também
é capaz de simular funções específicas do microcontrolador como portas de entrada e
saída, interrupções, timers e outros periféricos presentes no componente (LABCENTER).
2.2.8.
Relés Eletromagnéticos
Apesar de possuírem entradas e saída digitais, microcontroladores apresentam
limitações de tensão e corrente, deste modo para acionarem sistemas de maior potência
necessitam de interfaces entre os circuitos. Para tal faz-se uso de relés eletromagnéticos.
Segundo Ulaby, define-se relé eletromagnético por:
“Uma chave ou interruptor que pode ser ativado magneticamente para as posições
“ligado” ou “desligado”. Consiste em duas lâminas de ferro-níquel separadas por uma
pequena distância. (...) O contato elétrico entre as lâminas (posição “ligada”) é realizado
aplicando-se um campo magnético ao longo do comprimento delas. O campo, induzido
por uma corrente que percorre um fio enrolado, faz com que as lâminas assumam
polaridades magnéticas opostas, forçando assim a atração entre elas e eliminando o
espaçamento entre ambas.” (ULABY, 2007).
48
Em 1820 foi construído o primeiro eletroímã, e desde então são aplicados em
diversos dispositivos. Ao se construir um eletroímã no formato de solenoide linear, é
possível usá-lo para atrair ou repelir lâminas metálicas e assim aproveitar esta capacidade
para criar uma que pode ser acionada em um circuito, obtendo-se assim um relé
eletromagnético (ULABY, 2007).
O funcionamento mais detalhado do relé pode ser observado na Figura 23. Se a
bobina de energização não estiver alimentada, não haverá forças resultantes do campo
magnético e o contato móvel estará em sua posição normal (podendo ser “aberto” ou
“fechado”). Caso a bobina passe a ser alimentada, haverá a criação de um campo
magnético que, por meio da força de atração, irá movimentar o contato móvel de sua
posição inicial para a posição contrária. Este simples componente permite criar diversos
acionamentos mais complexos, visto que a energização da bobina pode ser controlada,
obtendo-se assim, uma chave controlada para os mais diversos propósitos.
Figura 23 – Representação básica de um relé.
Fonte: Electronics-Tutorials (2013).
2.2.9.
Fontes Chaveadas
Para o funcionamento dos microcontroladores, faz-se necessário níveis de tensão
específicos em corrente contínua, para tal faz-se uso de fontes de tensão que possam
prover os níveis de tensão adequados.
49
As fontes chaveadas foram desenvolvidas nos anos 60 com o objetivo de substituir
fontes lineares e a partir desta data encontraram diversas outras aplicações como em:
computadores
e
microcomputadores,
periféricos
(impressoras,
terminais,
etc),
telecomunicações, eletrodomésticos, equipamentos médicos, satélites, aviões e similares,
equipamentos militares e fontes de alimentação (BARBI, 2001).
Com o avanço da tecnologia da eletrônica de potência e do surgimento de novos
componentes, as frequências de operação utilizadas nas fontes chaveadas chegaram à
faixa dos MHz e seu rendimento está próximo de 90% (BARBI, 2001).
Algumas das características necessárias para estas fontes de alimentação possam
ser usadas em aplicações industriais são: isolação entre a fonte e a carga, alta densidade
de potência para a redução do tamanho e do peso, sentido de fluxo de potência
controlado, eficiência da conversão elevada, formas de onda de entrada e saída com uma
baixa distorção harmônica total para que os filtros sejam pequenos, fator de potência
controlado caso sejam usadas em aplicações de corrente alternada (RASHID, 1999).
2.2.9.1. Fontes ATX
Fontes ATX, normalmente utilizadas na informática apresentam diferentes níveis
de tensão, além de grande confiabilidade, podendo ser aplicadas em outras áreas da
eletrônica. São compactas e alta eficiência para a transformação dos níveis de tensão.
O padrão ATX (Advanced Technology eXtended), introduzido pela Intel em 1995
ditou a forma na qual as fontes de alimentação para computadores evoluíram nos anos
recentes. Lançado como um melhoramento do antigo padrão AT (Advanced Technology),
o padrão ATX requer uma fonte de alimentação que produza três saídas em corrente
contínua: +3,3 V, +5 V e +12 V (HEXUS, 2013).
Em 2003, o padrão ATX 2.0 reavaliou a forma de como a energia é distribuída,
especificando que duas saídas independentes de 12 V deveriam ser usadas, ambas
possuindo proteção contra sobre-corrente, para alimentar a maioria dos componentes do
computador pessoal. Além disso, o padrão ATX 2.0 acrescentou outras 3 entradas de 3.3
V, 5 V e 12 V respectivamente à fonte de alimentação. O ATX 2.1, anunciado em 2005
adicionou conectores dedicados de 75W para alimentação de placas gráficas que
50
requerem maior potência, seguido pelo ATX 2.2 que introduziu conectores de 150W. A
revisão mais recente, ATX 2.3 que data de 2007, requer que todas as fontes de
alimentação ofereçam pelo menos 70% de rendimento, com uma recomendação opcional
de pelo menos 80% (HEXUS, 2013).
Figura 24 – Fonte ATX AKASA.
Fonte: AKASA (2013).
2.2.10. SENSORES DE PRESSÃO
Utilizados para detectar pressões em instalações ou plantas. Seu funcionamento
resume-se a transformar a pressão exercida em um determinado ponto em um
deslocamento, o qual poderá ser convertido em um sinal elétrico.
Pressão é uma grandeza escalar e sua unidade no Sistema Internacional de
Unidades (SI) é o Pascal (Pa), em homenagem à Blaise Pascal. É definida como a força
exercida por uma unidade de área, conforme equação II.
=
Na equação 2,
é a pressão dada em Pascal,
a área em m² sobre a qual a força é aplicada.
(2)
é a força dada em Newtons e
é
51
Como pressão é uma grandeza analógica deve-se convertê-la em uma grandeza
que possa ser compreendida pelo microcontrolador.
Os sensores de pressão por membrana com semicondutor, conforme figura 25,
apresentam uma membrana fina posicionada sobre um semicondutor, o qual quando
pressionado tem suas características de condução alteradas (INSTITUTO NEWTON C.
BRAGA LTDA, 2013).
Figura 25 – Sensor de Pressão por Membrana com
Semicondutor.
Fonte: INSTITUTO NEWTON C. BRAGA LTDA (2013).
52
2.3.
2.3.1.
PNEUMÁTICA
Fluidos
Sólidos têm “geralmente volume e forma bem definidos, que só se alteram em
resposta a forças externas. Um líquido tem volume bem definido, mas não a forma:
mantendo seu volume, amolda-se ao recipiente que o contém. Um gás não tem nem forma
nem volume bem definidos, expandindo-se até ocupar todo o volume do recipiente que o
contém. Líquidos e gases têm em comum a propriedade de escoar ou fluir facilmente”
(NUSSENZVEIG, 2002).
Para aprofundar a definição de fluídos e então distinguirmos eles dos sólidos é
necessário compreender os diferentes tipos de tensão que atuam em um meio material.
Por definição tensão descreve a intensidade de uma força sobre uma área. Então é
preciso distinguir tensões normais e tangenciais à superfície sobre as quais atuam
(NUSSENZVEIG, 2002).
Quando a força atua perpendicularmente à superfície esta é chamada de tensão
normal. Se a força atua tangente à área, esta é chamada de tensão tangencial ou de
cisalhamento. Tensões Normais geram forças normais, compressão ou tração. Tensões
Tangenciais geram forças tangenciais, cortantes ou de cisalhamento. Fundamentalmente
sólidos e fluidos respondem de maneiras diferentes às tensões tangenciais. Sólidos,
quando submetidos à forças tangenciais deformam-se proporcionalmente ao esforço
aplicado sobre eles, mantendo-se em equilíbrio a cada situação de carga. Fluidos
deformam-se de maneira continua quando sujeitos à forças de cisalhamento, não
importando o quão pequenas são essas forças.
2.3.2.
Princípio de Pascal
Alterações de pressão aplicadas em um líquido confinado são transmitidas a todos
os pontos do líquido e às paredes do recipiente, que contém este líquido, sem qualquer
diminuição.
53
Quando contido em um recipiente fechado, o ar exerce uma pressão igual sobre
as paredes. Por Blaise Pascal, tem-se: “a pressão exercida em um líquido confinado em
forma estática atua em todos os sentidos e direções, com a mesma intensidade,
exercendo forças iguais em área iguais” (SCHRADER BELLOWS, 1987).
2.3.3.
Introdução à Pneumática
Os termos Pneumático e Pneumática são provenientes da palavra grega
“Pneuma”, que significa respiração ou sopro. Em sua concepção original, a pneumática
se ocupava da dinâmica do ar e dos fenômenos gasosos, mas a técnica criou um conceito
próprio, pois, na pneumática fala-se somente da aplicação da sobrepressão e do vácuo
(DEPPERT & STOLL, 1978).
O ar comprimido tem encontrado um maior número de aplicações dentro da
indústria como forma de racionalização do trabalho, assim como a água e a Energia
Elétrica (SCHRADER BELLOWS, 1987).
2.3.4.
Ar Comprimido
A maioria das técnicas pneumáticas baseia-se no aproveitamento da energia de
sobrepressão gerada previamente. O portador desta energia é o ar comprimido. Todo
sistema pneumático consome ar comprimido para executar trabalho (DEPPERT & STOLL,
1978).
A geração de ar comprimido exige grande gasto de energia, parte da energia
utilizada se transforma em calor (energia térmica) e a outra se torna energia potencial, o
ar comprimido (SCHRADER BELLOWS, 1987).
A produção do ar comprimido depende de processos de compressão do ar, que
estão divididos em processos isobárico, isométrico (ou isocórico), isotérmico, adiabático
(ou isoentrópico) ou politrópico.
Basicamente, qualquer processo utilizado para comprimir o ar gera calor e por
refrigeração tende-se a eliminar este calor, na medida do possível. Deste modo, o
54
processo de compressão real situa-se entre condições adiabáticas e isotérmicas
(SCHRADER BELLOWS, 1987).
2.3.5.
Compressor
É chamado de compressor toda máquina que impulsiona ar, gases ou vapores
exercendo influência sobre as condições de pressão (DEPPERT & STOLL, 1978).
Segundo a apostila de Schrader Bellows Indústria e Comércio, “compressores são
máquinas destinadas a elevar a pressão de certo volume de ar, admitindo as condições
atmosféricas, até uma determinada pressão exigida na execução dos trabalhos realizados
pelo ar comprimido”.
A seleção correta de um compressor é de extrema importância para a economia
de mão de obra e aumento da produção. O compressor é frequentemente a máquina que
mais consome energia elétrica nas fábricas. Deve-se considerar também a economia de
espaço, a disponibilidade de água fria para resfriamento, além dos custos de manutenção
provenientes desta escolha (ATLAS COPCO BRASILEIRA S/A, 1972).
A figura 26 estabelece a classificação dos tipos de compressores encontrados.
Compressores
Deslocamentos
Dinâmicos
Deslocamentos
Positivos
Ejetor
Fluxo
Radial
Fluxo
Axial
Rotativos
Roots
Anel
Líquido
Palhetas
Parafuso
Mecânico
Hidráulico
Figura 26 – Tipos de Compressores.
Fonte: SCHRADER BELLOWS (1987).
Alternativos
Diafragma
Livre
Pistão
Tipo
Simples
Labirinto Efeito
Ou
Tronco
Duplo
Efeito
55
Compressores são classificados segundo seu princípio de trabalho, podendo ser
de deslocamento positivo ou deslocamento dinâmico.
2.3.5.1. Deslocamento Positivo
Este princípio baseia-se na redução do volume. Neste tipo de compressor, o ar é
admitido em uma câmara isolada do meio exterior, e nessa câmara seu volume é
gradualmente diminuído, processando-se a compressão (SCHRADER BELLOWS, 1987).
2.3.5.2. Deslocamento Dinâmico
Este princípio baseia-se na conversão da energia cinética em energia de pressão.
O ar admitido é colocado em contato com impulsores dotados de alta velocidade, sendo
então acelerado e direcionado para difusores que diminuem a velocidade de escoamento
do fluído e, consequentemente, elevam sua pressão (SCHRADER BELLOWS, 1987).
2.3.6.
Preparação do Ar Comprimido
O ar atmosférico é um mistura homogênea de gases, dentre eles oxigênio e
nitrogênio além de contaminantes como água, óleo e poeira. Partículas de poeira são
abrasivas e o óleo queimado no ambiente de lubrificação do compressor é responsável
por manchas nos produtos. O compressor, ao admitir o ar, aspira seus compostos, após
a compressão adiciona calor à mistura sob a forma de pressão e temperatura, os gases
sempre permanecerão em seu estado nas temperaturas e pressões normalmente
utilizadas na pneumática, já a água poderá condensar e ocasionar problemas
(SCHRADER BELLOWS, 1987).
O grau de pureza do ar aspirado é decisivo para a duração do compressor. O ar
quente e úmido conduz à uma maior produção de condensação após a compressão
(DEPPERT & STOLL, 1978).
A presença de água condensada nas linhas de ar tem como consequência a
oxidação da tubulação e componentes pneumáticos, a destruição da película lubrificante
56
entre partes em contato, o desgaste prematuro dos componentes, a redução da vida útil
(peças, válvulas, cilindros), o arrasto de partículas solidas para dentro dos componentes
pneumáticos (prejudicando seu funcionamento), a inutilização de instrumentos de
medição, além de provocar golpes de aríete nas superfícies adjacentes (SCHRADER
BELLOWS, 1987).
É de suma importância que grande parte da água, bem como resíduos de óleo,
seja removida para evitar a redução da eficiência de todos os dispositivos.
Nas indústrias de transformação de alimentos, elaboração de cosméticos e
produtos farmacêuticos é necessário que o ar comprimido não tenha água e seja isento
de óleo (DEPPERT & STOLL, 1978).
2.3.7.
Atuadores
O dispositivo responsável por transformar a energia do ar comprimido em trabalho
é o cilindro pneumático. Estes cilindros vão exercer força, nos dispositivos, de acordo com
a pressão disponível na rede e na área da seção transversal do êmbolo de cada cilindro.
Os cilindros são utilizados em elevação, deslocamento, transporte, torção, giros e
manipulação de peças, entre outros (LELUDAK, 2010).
2.3.8.
Cilindros
Cilindros podem ser separados em dois tipos construtivos: simples ação ou dupla
ação. Os cilindros de simples ação podem realizar trabalho apenas em um sentido, visto
que o retorno à posição inicial se dá por ação de uma mola. Estes atuadores podem ser
normalmente recuados ou normalmente avançados (LELUDAK, 2010).
Já os atuadores de dupla ação podem realizar trabalho tanto no curso de avanço
quanto no curso de retorno. Quando o ar comprimido entra pela câmara traseira, o cilindro
avança e por consequência o que estiver acoplado à haste irá se deslocar
simultaneamente (LELUDAK, 2010).
57
2.3.9.
Válvulas
Utilizadas em tubulações tendo por finalidade controle de vazão de um
determinado fluido. Podendo ser operadas mecanicamente, eletricamente ou com
dispositivos pneumáticos, conforme figura 27. Válvulas são também denominadas
elementos finais de controle.
Figura 27 – Válvula Globo.
Fonte: Autoria Desconhecida.
A escolha de uma válvula adequada deve ser feita tendo como bases: a conexão,
o diâmetro do orifício interno, o fluido controlado, os materiais compatíveis com o fluido,
pressão de trabalho e a temperatura (ASCOVAL, 2011).
2.3.10. Válvula Solenóide
Válvulas solenóides são compostas por três unidades básicas funcionais, um
núcleo eletromagnético, uma bobina (solenóide) e uma válvula contendo um orifício, no
qual, um disco de vedação é posicionado para interromper ou permitir a passagem de
fluido.
O fechamento ou abertura da válvula dependem do movimento de seu núcleo
magnético, que é atraído quando a bobina é acionada (ASCOVAL, 2011).
58
2.3.10.1. Válvulas Solenóides de Ação Direta
Estas válvulas possuem seus núcleos ligados mecanicamente ao disco de
vedação, assim a válvula permanece aberta ou fechada dependendo unicamente da
bobina estar ou não energizada, conforme figura 28. Seu funcionamento é independente
da pressão da linha ou da vazão (ASCOVAL, 2011).
Figura 28 – Válvula Solenóide de Ação Direta.
Fonte: ASCOVAL (2011).
A força necessária para abrir a válvula é sempre proporcional ao seu tamanho, em
casos em que se faz necessário a utilização de diâmetros maiores para o orifício interno,
mas não se deseja utilizar de solenóides maiores, faz-se o uso de válvulas solenóides
pilotadas internamente (ASCOVAL, 2011).
2.3.10.2. Válvulas Solenóides Pilotadas Internamente
Estas válvulas possuem em sua construção um diafragma e três orifícios, um
principal localizado no corpo da válvula e dois outros para seu acionamento. Estas
válvulas utilizam a pressão da linha para auxiliarem em sua operação (ASCOVAL, 2011).
Estas válvulas aproveitam da pressão da linha para realizar o trabalho necessário
para a abertura ou fechamento da válvula, indicado na Figura 29. O trabalho da válvula
solenóide é unicamente direcionar o fluxo da rede para o diafragma que determina a
abertura ou fechamento da válvula.
59
Figura 29 – Válvula Solenóide Pilotada Internamente.
Fonte: ASCOVAL (2011).
2.3.10.3. Válvula Solenóide Pilotada Externamente
Estas válvulas possuem em sua construção um diafragma para controlar a sua
abertura e seu fechamento. Estas válvulas utilizam uma pressão auxiliar para realizar sua
operação. Ou seja, a pressão de uma rede pneumática auxiliar é utilizada para abrir ou
fechar a válvula da linha primária (ASCOVAL, 2011).
2.3.10.4. Válvula Solenóide Duas Vias
A configuração de válvulas duas vias consiste em uma conexão de entrada e outra
de saída, conforme ilustrado na figura 25. As duas construções existentes são:
normalmente fechada ou normalmente aberta (ASCOVAL, 2011).
A)
B)
Figura 30 – Diagrama Válvulas Solenóide Duas vias com retorno por mola:
a) normalmente aberta e b) normalmente fechada.
Fonte: Autoria Própria.
60
2.3.10.5. Válvulas Especiais
Existem válvulas solenóides disponíveis no mercado para aplicações especiais,
cita-se vácuo, criogenia, fluidos corrosivos, áreas classificadas, operação de
líquido,
para combustão (queimadores), amônia, óleos combustíveis, entre outras.
Características específicas são adicionadas às válvulas como: duplo disco de
fechamento, fechamento rápido, válvulas redundantes com dois solenóides, retardo no
fechamento ou na abertura, etc.
Podem ser encontradas válvulas para alta ciclagem e com baixo ruído.
2.3.10.6. Dimensionamento
O correto dimensionamento das válvulas evita elevados investimentos iniciais
assim como a baixa eficiência de processos. Para o dimensionamento de uma válvula
deve-se conhecer a vazão máxima e mínima a ser controlada, a máxima pressão
diferencial através da válvula, o peso específico, a temperatura e a viscosidade do fluído
que passa pela válvula (ASCOVAL, 1996).
Para determinar, de forma prática e com bom grau de precisão a tubulação para
uma rede de ar comprimido utiliza-se da pressão de trabalho, da queda de pressão
admissível, do fluxo de ar, do comprimento da tubulação e dos componentes desta rede
(LELUDAK, 2010).
Quando se trata de dimensionamento é necessário utilizar de critérios específicos
para evitar investimentos elevados quando equipamentos são superdimensionados, ou a
baixa eficiência nas ocasiões em que ocorre o subdimensionamento dos mesmos.
2.3.10.7. Tempo de Resposta
É o tempo necessário para completar a transição do estado de uma válvula de
completamente fechada para completamente aberta, ou vice-versa. Esse tempo de
resposta depende das características da válvula como tamanho, condições da operação,
61
características elétricas, e características do fluido, como temperatura, pressão da linha e
queda de pressão (ASCOVAL, 2011).
2.3.10.8. Ruídos do Solenóide
As válvulas solenóides emitem um som em operação. Sempre que energizadas é
perceptível um estalo, às vezes, acompanhado do zumbido característico da corrente
alternada. O zumbido proveniente da Corrente Alternada decorre da constante reversão
do campo magnético produzido pela corrente alternada, que pode causar vibrações em
partes móveis do solenóide.
Em ambientes industriais esse zumbido não apresenta problemas, no entanto, em
ambientes silenciosos, como hospitais esse ruído pode se tornar perturbador.
Medidas podem ser tomadas para reduzir o ruído excessivo tomando cuidado na
maneira com que as válvulas são montadas e fixadas em painéis ou estruturas. A
utilização de arruelas, suportes adicionais, braçadeiras e juntas de borracha podem
resolver problemas de acústica do painel.
Ruídos podem ser causados por problemas de tensão na bobina, devido a um
sistema de controle defeituoso, a alta resistência do circuito, interruptores ou relés
desgastados, peças danificadas no solenóide, bobina danificada, ou a falta de peças
causando enfraquecimento da estrutura.
Sempre que um ruído surge, sua causa deve ser determinada e eliminada. Após
essa determinação, a válvula então deve ser inspecionada para assegurar que ainda há
possibilidade de reparação de sua estrutura. Existem casos em que a vibração pode
danificar partes fixas e móveis da estrutura da válvula, e então, a substituição desta é a
única solução.
2.3.10.9. Golpe de Aríete
Efeito que ocorre quando um líquido não compressível fluindo através de uma
tubulação a uma determinada pressão e velocidades é abruptamente interrompido,
gerando forças contra as paredes da tubulação e seus componentes. Essa onda de
62
choque transmitida pelo fluido caminha para trás e para frente, chocando-se com barreiras
como, conexões em T, cotovelos e o assento das válvulas até que suas forças
desapareçam devido a perdas por atrito.
Sempre que válvulas são utilizadas para controlar líquidos, tanto em grandes
quanto simples processos, são encontradas essas forças.
63
3. DESENVOLVIMENTO DO PROTÓTIPO
3.1.
DESIGN DO COLCHÃO
Embora o design do colchão a ser controlado não seja objeto de estudo deste
trabalho, uma breve análise entre os modelos citados deve ser realizada. O formato das
câmaras ou células do colchão controladas pode ter influência negativa sobre o paciente,
mesmo se utilizadas as pressões adequadas. A disposição das câmaras em relação ao
paciente deve ser considerada antes da definição do modo de operação do sistema.
A figura 31 apresenta uma comparação entre os tipos de orientação e os formatos
das células de um colchão. As células, ou bolsões, constituintes do colchão podem
apresentar duas orientações, verticais ou horizontais.
Figura 31 – Comparação entre orientação vertical e horizontal de células.
Fonte: RALSTON et al. (2011).
Quando comparadas, células verticais têm contato com uma área relativamente
menor da pele em relação às células com orientação horizontal. Dependendo do tamanho
destas células, pode-se dizer que sua influência é pontual, afetando áreas específicas do
corpo. Sua operação pode ser realizada formando-se um grande grupo de bolsões ou
64
pequenos grupos, onde há relação matricial entre os bolsões, os quais ficam dispostos
em linhas e colunas. Embora consigam agir mais pontualmente, sobre as regiões do
corpo, a construção de um colchão com essas características é de extrema complexidade,
sendo necessária a confecção de moldes específicos.
Células de orientação horizontais podem ser de diversos tamanhos e formatos.
Células horizontais grandes são normalmente encontradas em colchões a ar estáticos.
Devido ao seu tamanho, estas podem criar forças de cisalhamento entre a pele e a
superfície do bolsão, conforme ilustrado na figura 31. Do mesmo modo, é inviável utilizar
de padrões de acionamento para realizar troca dos pontos de apoio.
Células de orientação horizontal pequenas, são normalmente circulares
apresentando diversos diâmetros. Também podem estar dispostas paralelamente ou
perpendicularmente ao corpo do paciente ou acamado. Quando paralelas, se alternadas
não produzem variação entre os pontos de apoio do paciente, pois, atuam sobre uma área
muito grande do corpo, além dos membros perderem sustentação vertical. Quando
perpendiculares ao corpo agem como faixas, dando sustentação integral a todos os
membros, além de permitir operações em padrões para distribuição de carga e troca dos
pontos de apoio.
Através desta análise, decidiu-se por focar na construção de um protótipo com
células horizontais pequenas, dispostas paralelamente ao corpo sustentado.
Dentre os materiais disponíveis no mercado que apresentam uma configuração
para atender os requisitos propostos, o que mais se aproxima são as câmaras para pneus
de bicicleta, as quais apresentam diâmetros pequenos de aproximadamente 3 a 4 cm e a
largura de sua superfície de contato é de até 4,5 cm.
As câmaras, feitas de borracha, estão normalmente sujeitas a pressões superiores
a 32 psi (1655 mmHg), valor maior do que a pressão de operação dos colchões que está
em torno de 25 mmHg. Isso garante a resistência das câmaras para estes testes. Além
destas possuírem conexões com rosca, o que auxilia na ligação com o circuito
pneumático.
O tamanho médio de um colchão para leito hospitalar ou de uma cama de solteiro
é de 190 x 80 x 10 cm. Para criar um protótipo que pudesse ser sobreposto a estes
65
colchões, utilizou-se de câmaras de pneu de bicicleta de aro 24 pol. Se esticadas,
apresentam comprimento entre 0,8 m e 1 m.
A forma que as câmaras assumem quando cheias é circular, para moldarem-se ao
aro e ao pneu. Nesta aplicação esperou-se mantê-las esticadas dispostas em linhas. A
tendência natural das câmaras é que retornem a sua forma de equilíbrio, assim que
infladas.
Então, para mantê-las adequadamente esticadas foi necessário adicionar uma
estrutura de PVC, para manter o perfil das bordas das câmaras permitindo a passagem
do ar, e outra metálica para dar resistência ao conjunto, conforme figura 32.
Figura 32 – Estrutura do Protótipo & Câmaras Esticadas.
Fonte: Autoria Própria.
Com esta disposição os grupos de bolsões podem ser alterados sem grandes
dificuldades, realizando apenas as conexões pneumáticas.
Através da figura 33, pode-se visualizar a disposição dos grupos de bolsões de
alívio de pressão. O primeiro grupo, A, em vermelho é destinado a aliviar a pressão sobre
a cabeça do indivíduo. O segundo e o terceiro grupos (B e C) são representados
respectivamente em verde e azul, e são destinados ao alívio da pressão no restante do
dorso do indivíduo. É interessante notar que cada grupo tem uma linha pneumática
66
independente, permitindo a pressurização individual destes, sendo possível aplicar níveis
diferenciados de pressão para cada um.
Figura 33 – Disposição dos Grupos de Bolsões da Estrutura do
Protótipo & Câmaras Esticadas.
Fonte: Autoria Própria.
A conexão dos bicos das câmaras de ar apresenta rosca em milímetros; porém,
normalmente sistemas pneumáticos industriais utilizam de roscas em polegadas. É
necessário, então, inserir uma adaptação entre as conexões. Para tal, foram utilizadas
válvulas prolongadoras com retenção, as quais são utilizadas em sistemas automáticos
de suspensão para veículos pesados, como caminhões e semi-reboques, conforme
mostrado na figura 34.
67
Figura 34 – Válvula Prolongadora Com Retenção.
Fonte: Autoria Própria.
3.2.
3.2.1.
SISTEMA PNEUMÁTICO
Compressor
Decidiu-se pela utilização de um compressor comercial marca Tecumseh, modelo:
AZA1335DDS conforme descrito no APÊNDICE A. Trata-se de um modelo normalmente
utilizado em geladeiras, freezers e bebedouros. Este compressor é classificado como de
deslocamento positivo, alternativo a pistão, pois, utiliza de um pistão movido por um eixo
excêntrico para pressurizar o ar. Esta escolha deve-se à tensão do equipamento, 115-127
V em 60 Hz, a sua baixa potência, 105 W, baixo torque de partida, refrigeração estática
através de óleo, peso de 7,2 kg, uso em baixas pressões, e sua confiabilidade.
3.2.2.
Válvulas Solenóides 2/2 Vias
Como elementos de controle foram utilizadas válvulas solenóides de ação direta
2/2 vias, normalmente fechadas, com retorno por mola e tensão de operação 12 V em
corrente contínua. Essas válvulas são usualmente utilizadas para fins automotivos, como
em sistemas de suspensão veicular. Sua escolha deve-se ao seu pequeno porte, baixa
potência (12 W), baixo custo (cerca de 30 % do valor das válvulas industriais para fins
diversos), possuir conexões através de rosca, permitindo a utilização de engate rápido e
68
sua dinâmica de funcionamento simplificada em relação a válvulas 3/2 vias ou 5/2 vias. A
válvula utilizada do fabricante Thermoval está ilustrada na figura 35.
Figura 35 – Válvula 2/2 Vias Thermoval.
Fonte: Autoria Própria.
3.2.3.
Conexões e Mangueiras Pneumáticas
Foram utilizadas para a condução do ar entre compressor, válvulas e bolsões
mangueiras de poliuretano super flexíveis, com alta resistência, que não quebram ou
racham. Os diâmetros escolhidos foram de 6, 8 e 10 mm para conectar o compressor, as
válvulas, o sensor e as câmaras, conforme figura 36.
Figura 36 – Mangueiras de de 10, 8 e 6 mm.
Fonte: Autoria Própria.
69
As conexões foram feitas através de engates rápidos da marca BEL AIR. Em
função da praticidade, foram utilizadas diversos modelos de engates rápido para auxiliar
na montagem do circuito pneumático, citam-se conexões retas, cotovelos, uniões para
diferentes diâmetros, uniões em Y, uniões em T e um controlador de fluxo para o escape
do ar, os quais podem ser verificados na figura 37.
Figura 37 – Engates Rápidos para sistemas
Pneumáticos – Fabricante BEL AIR.
Fonte: Autoria Própria.
3.2.4.
Manômetro Aneróide
Para a verificação da pressão dos bolsões foi anexado ao circuito pneumático um
manômetro aneróide com range de operação de 0 à 300 mmHg. O manômetro utilizado é
da Marca P.A. Med, normalmente utilizado em conjuntos de esfigmomanômetro e
estetoscópio para medição de pressão arterial. Este manômetro está conectado ao
mesmo ponto de medição do sensor eletrônico, assim pode-se verificar a precisão do
circuito eletrônico. Deve-se lembrar que o manômetro utilizado tem aplicações para a
medicina, portanto este passou por verificação e aferição do INMETRO, verificação
número 12.035.342-8, ano de fabricação 2012. O manômetro utilizado está apresentado
na figura 38.
70
Figura 38 – Manômetro Aneróide ,
fabricante P.A. Med.
Fonte: Autoria Própria.
3.3.
DESENVOLVIMENTO DO SISTEMA ELETROPNEUMÁTICO
Para a construção do circuito pneumático, decidiu-se separar as câmaras de ar em
3 conjuntos. Para cada conjunto foram alocadas duas válvulas solenóides 2/2 vias, uma
para a entrada do ar e outra para a saída. Todas as entradas de ar dos conjuntos estão
interligadas com a saída do compressor. Todas as saídas de ar dos conjuntos estão
interligadas em uma mesma linha de ar e em seu final foi adicionada uma válvula
denominada bypass para o escape do ar. Nesta linha de ar estão o sensor digital para o
envio do sinal analógico ao microcontrolador e um manômetro aneróide, instalado apenas
para comprovar a calibração do sistema de medição. Este esquema está apresentado na
figura 39.
71
Figura 39 – Esquema de montagem do circuito pneumático.
Fonte: Autoria Própria.
3.4.
3.4.1.
SISTEMA ELETRÔNICO
PIC16F877A
A seleção do microcontrolador da família PIC deve-se a sua utilização recorrente
ao longo do curso de Engenharia Elétrica. Esta familiarização auxilia no desenvolvimento
do sistema, pois, sua dinâmica já é conhecida. A programação do microcontrolador pode
ser realizada tanto em linguagem Assembly quanto em C, pois, os compiladores utilizados
realizam a conversão destas para linguagem de máquina.
Este possui número suficiente de pinos de entradas e saídas, além de possuir
módulos A/D adequados para a função de tomada de pressão.
72
3.4.2.
Sensor de Pressão
A seleção dos sensor iniciou-se com a determinação do range de operação do
sensor, o qual deve estar próximo das pressões capilares, entre 12 e 35 mmHg, conforme
descrito no referencial sobre úlceras. Dentre os modelos encontrados para aquisição no
mercado nacional, encontram-se os modelos MPX2010DP, MPX2010GP, MPXM2010GS
e MPX5010DP, todos fabricados pela empresa Motorola, conforme figuras 40, 41, 42 e
43. Todos estes modelos operam no range de pressão de 0 à 10 kPa, ou de 0 à 75 mmHg.
Estes sensores fornecem um tensão de saída linear em relação a pressão medida.
A tensão de saída cresce linearmente à medida que a diferença de pressão entre a
entrada P1 (lado de pressão) e o lado P2 (lado de vácuo) aumenta.
Figura 40 – Sensor de Pressão
Motorola MPX2010DP.
Fonte: Autoria Própria.
Figura 41 – Sensor de
Pressão
Motorola
MPXM2010GS.
Fonte: Autoria Própria
73
Figura 42 – Sensor de Pressão Motorola
MPX5010DP.
Fonte: Autoria Própria.
Figura 43 – Sensor de Pressão
Motorola MPX2010GP.
Fonte: Autoria Própria.
Para a aquisição da pressão na linha foi escolhido o sensor MPX5010DP,
APÊNDICE B. O principal motivo desta escolha é que este sensor, diferente os demais
sensores encontrados, já apresenta integrado um circuito amplificador, conforme figura
44. Este sensor foi concebido para aplicação em microcontroladores, gerando um nível
de sinal de saída analógico proporcional à pressão aplicada, além de ter um erro máximo
de 5,0 % conforme descrito no APÊNDICE B, considerado satisfatório para os testes deste
projeto. A figura 45 apresenta a resposta típica do sensor em relação ao aumento da
pressão diferencial.
74
Figura 44 – Esquemático do Sensor de Pressão
MPX5010DP.
Fonte: MOTOROLA (1997).
Figura 45 – Tensão de saída Versus a Pressão
diferencial Sensor de Pressão MPX5010DP.
Fonte: MOTOROLA (1997).
Os sensores MPX2010DP, MPX2010GP e MPXM2010GS apresentavam o
empecilho de gerar dois sinais em dois pinos distintos, que deveriam ser processados por
um amplificador operacional para depois ser enviado até o conversor A/D.
3.4.3.
Módulo de Relés
Em função do acionamento das válvulas ser em tensão igual à 12 V, corrente
contínua, o microcontrolador não consegue acioná-lo diretamente, portanto, faz-se
necessário a utilização de um relé eletromagnético. O relé é acionado em 5 V, corrente
contínua, então fecha-se um contato que libera a tensão de 12 V para as válvulas.
75
Utilizou-se de módulos de relés, cada um dotado de 4 relés da marca Songle,
modelo SRD-05VDC-SL-C, os quais são acionados em 5 V. Seus contatos auxiliares
podem operar com até 250 V e 10 A em corrente alternada, ou até 30 V e 10 A em corrente
contínua. O módulo é apresentado na figura 46.
Figura 46 – Módulo com quatro relés.
Fonte: Autoria Própria.
O módulo de relés também contempla em sua estrutura diodos para funcionar
como roda-livre, optoacopladores para a interface entre o relé e o microcontrolador,
transistores para o acionamento do relé, Jumper para abrir o circuito dos relés e LEDs
indicadores. A figura 47 apresenta o diagrama esquemático do módulo de relés.
Figura 47 – Esquema de ligação do módulo de Relés.
Fonte: Autor Desconhecido.
76
3.4.4.
Fonte ATX
Devido à alimentação dos componentes ser em +12 V para as válvulas solenóides
e +5 V para o PIC16F877A, os relés e o sensor de pressão foi utilizado a fonte ATX. Este
tipo de fonte chaveada de energia normalmente utilizadas na informática, produz três
saídas em corrente contínua: +3,3 V, +5 V e +12 V, tem grande confiabilidade, alta
eficiência para a transformação dos níveis de tensão e modelo compacto.
3.4.5.
LCD
Para apresentar os dados de medição e operação do sistema faz-se necessário
uma interface gráfica. O protótipo utilizou de um Display LCD de dezesseis colunas e duas
linhas. O display disponibiliza informações das etapas da operação, dos timers do
microcontrolador e das medições de pressão.
3.4.6.
Descrição da Montagem do Circuito
O circuito que recebe o microcontrolador foi desenvolvido utilizando de uma placa
perfurada e componentes eletrônicos. Primeiro, foi soldado um soquete que iria receber o
PIC e a partir deste soquete, o restante do circuito tomou forma. A estrutura básica para
o funcionamento consiste de um cristal oscilador de 8 MHz, e 2 capacitores de 22 pF que
determinam o clock para o componente.
Para ligar as tensões de 5 V e 0 V ao circuitos, foram utilizados conectores com
parafusos, para auxiliar as conexões do circuito com a fonte de alimentação. Estes
mesmos conectores foram utilizados para conectar os pinos da porta que controla os
atuadores, de tal forma que se pudesse aparafusar cabos e ligá-los rapidamente ao
módulo de relés.
Para a conexão do display LCD e da interface com botões, foram utilizadas barras
de pinos soldadas na placa, para simplificar o processo de solda destes componentes que
apresentam número elevado de pinos.
77
A escolha do sensor MPX5010DP para a medição da pressão, decorre do fato que
este possui um amplificador operacional integrado, simplifica a montagem do circuito.
Deste modo é possível medir a tensão proporcional à pressão diretamente de um único
pino do sensor e coletá-lo no conversor A/D do microcontrolador.
A estrutura do sensor não foi soldada na placa. O sensor em si foi encaixado em
um soquete específico, pois, seus pinos são finos e poderiam vir a se torcer e
eventualmente quebrar durante a integração com o circuito pneumático.
Para o processo de gravação do programa elaborado no microcontrolador, foi
usado um gravador PICBurner ligado à porta paralela de um computador. A fim de evitar
que os pinos do PIC se dobrassem e acabassem quebrando devido ao fato de ter de se
encaixar o Circuito Integrado diversas vezes no soquete do gravador, foi elaborado um
esquema de gravação in-circuit. Esta ligação permite que o PIC não precise ser removido
do seu circuito original, fazendo necessárias apenas pequenas alterações na placa
perfurada, como a adição de uma barra de pinos que facilitava a ligação de um cabo flat
com o gravador.
3.5.
DESENVOLVIMENTO DO FIRMWARE
O algoritmo que é gravado dentro no microcontrolador apresenta três
funcionalidades básicas importantes: A medição de pressão, a calibração correta dos
grupos de bolsões e um padrão de alternância para o funcionamento do colchão.
A definição das portas e da pinagem do PIC está apresentada na tabela 1. Nesta
estão contidas as relações entre as portas, os pinos e as funções ou finalidades de cada
um.
Para o funcionamento dos atuadores (válvulas e compressor), as válvulas de
entrada e saída dos três grupos de bolsões, a válvula de escape e o próprio compressor
foram
declarados
como
variáveis
booleanas,
que
ligado/desligado ou aberto/fechado.
As variáveis são declaradas da seguinte maneira:
unsigned short vin[3], vout[3];
bit vbp,comp;
representam
os
estados
78
Onde, vin[n] e vout[n] representam os vetores que indicam os 3 grupos de bolsões,
ou seja, cada grupo contém uma válvula de entrada, vin[i] e uma válvula de saída, vout[i].
Durante a programação, é possível identificar a presença da variável i que representa o
grupo de bolsões que está sendo tratado. Vbp e comp são as variáveis que indicam o
estado da válvula de escape e do compressor.
Tabela 1 – Definição das Portas & Pinos do PIC
Porta
Pino da Porta
Número do Pino
Usado Para
A
0
2
Sensor de pressão
B
0
33
Display LCD pino D4
B
1
34
Display LCD pino D5
B
2
35
Display LCD pino D6
B
3
36
Display LCD pino D7
B
4
37
Display LCD pino RS
B
5
38
Display LCD pino E
C
0
15
Válvula de entrada do grupo 1
C
1
16
Válvula de saída do grupo 1
C
2
17
Válvula de entrada do grupo 2
C
3
18
Válvula de saída do grupo 2
C
4
23
Válvula de entrada do grupo 3
C
5
24
Válvula de saída do grupo 3
C
6
25
Válvula de bypass
C
7
26
Compressor
D
0
19
Botão “para cima”
D
1
20
Botão “para direita”
D
2
21
Botão “para baixo”
D
3
22
Botão “para esquerda”
D
4
27
Botão “enter”
Fonte – Autoria Própria.
Para generalizar certas funções para qualquer grupo de bolsões, as variáveis das
válvulas de entrada e saída foram indexadas em vetores. Assim foi possível criar algumas
funcionalidades básicas como a abertura e fechamento de todas as válvulas
simultaneamente, para facilitar certos comandos.
79
A exemplo destas funções verificam-se as funções void open_all_valves() e void
close_all_valves(). Estas podem ser verificadas no apêndice C.
Quando um comando é passado dentro do programa, para mudar o estado de um
determinado atuador, esta ação não acontece simultaneamente. Para isso, é necessário
confirmar um comando de execução, que muda o estado dos atuadores um a um, com
um intervalo de 262 ms entre eles. A esta função ou comando foi dado o nome de exec().
Esta função é do tipo void, pois sua execução não retorna qualquer valor.
Para não causar interrupções na execução do programa, por parte do
microcontrolador, esse atraso de 262 ms foi implementado a partir do timer do próprio
PIC, sendo que desta forma, o programa continua a rodar, contabilizando o tempo da
maneira requisitada, a função void timerv() é a função que recorre à um contador interno
do PIC.
Esse comando é de suma importância pois, ao longo dos testes, observou-se uma
corrente de inrush muito elevada quando todas as válvulas são acionadas
simultaneamente. Esta corrente era de tal forma intensa que a fonte ATX utilizada para
acioná-las, era reinicializada por seu circuito integrado de segurança.
Assim, para evitar a soma destas correntes demasiadamente grandes, houve a
necessidade de se incluir um atraso para que cesse a corrente de inrush e a fonte tenha
que suprir uma corrente inicial reduzida.
Dentro desse mesmo comando, são passados os valores binários para a porta do
microcontrolador responsável por atuar as válvulas e o compressor, ou seja, 1 para ligado
e 0 para desligado. No entanto, o comando de saída na porta do microcontrolador passa
primeiro por um módulo de relés, que por sua vez aciona os atuadores. Devido aos
aspectos construtivos deste módulo de relés, este deve receber lógica inversa para
funcionar corretamente, ou seja, 1 para desligado e 0 para ligado. Assim, neste comando
do microcontrolador, antes de enviar os valores binários para a porta do microcontrolador,
foi necessário inverter a lógica destas variáveis, para que a interface microcontroladormódulo de relés funcionasse adequadamente. Deste modo, nega-se a variável ao enviála para a porta.
Para a medição de pressão, foi implementada uma rotina que se utiliza dos
conversores A/D do microcontrolador. O sensor de pressão MPX5010DP foi ligado na
80
entrada do conversor A/D de 10 bits do PIC e, como este apresenta uma sensibilidade de
450 mV/kPa, realizou-se a operação conforme as equações 3, 4 e 5.
2
− 1 = 1023
"
= #!
"
=
(3)
= 5!
(4)
$%
&
(5)
Assim, a tensão lida no sensor pelo conversor A/D resultaria em um número de bits
que seria interpretado pelo microcontrolador. Para converter este valor de bits para uma
unidade de pressão válida, pode-se fazer uma aproximação, multiplicando ou dividindo o
número de bits retornado pelo conversor A/D por uma constante K. É interessante notar
que para otimizar a memória do microcontrolador, deve-se escolher K como um número
inteiro. Assim, escolheu-se converter os bits para mmHg, dividindo-se por uma constante,
conforme equação 6.
''()
=
* +,-.
/
(6)
A exemplo destes, se a pressão lida for de 4 kPa que é igual a 30 mmHg, deve-se
multiplicar este valor pela sensibilidade do sensor, para se ter o nível de tensão lido,
conforme equação 7.
4 . 0,450 ! = 1,8 !
(7)
Este valor de tensão é substituído nas equação 5, tem-se:
1023 . 1,8
≅ 369
5
Substituindo o número de bits na equação 6, tem-se que:
81
30 =
369
7
7 ≅ 12
Deste modo, a equação 6 reformulada para a pressão medida em tensão equivale
à equação 9.
''()
=
* +,-.
(9)
Dessa forma, o microcontrolador foi capaz de realizar medições de pressão com
certa precisão em uma faixa de valores próximos a 4 kPa ou 30 mmHg.
Para a calibração dos grupos de bolsões, foi programada uma rotina que mede a
pressão inicial dentro dos bolsões e, dependendo da medição, executa certos
procedimentos. A esta função deu-se o nome de void calibrate(). Primeiro, abre-se a
válvula de saída do grupo de bolsões a ser calibrado, mantendo a válvula de bypass
fechada, dessa forma equalizando a pressão na linha de medição com a pressão dos
bolsões. Em seguida, fecha-se a válvula de saída e realiza-se a medição de pressão. A
medição de pressão é realizada pela função measure_pressure(), conforme apêndice C
Se a pressão medida já está dentro do padrão estabelecido, mais ou menos 4
mmHg em relação à pressão de referência, a rotina termina, visto que os bolsões já estão
calibrados. Se a pressão medida está abaixo da pressão estabelecida, inicia-se um
procedimento de enchimento dos bolsões. Se a pressão medida está acima da pressão
estabelecida, inicia-se um procedimento de escape de ar. A pressão de referência
estabelecida foi denominada unsigned short prss, conforme apêndice C.
Supondo-se que a pressão estivesse menor, o procedimento de enchimento iniciarse-ia. Neste, abrir-se-iam as válvulas de entrada e saída do respectivo conjunto de
bolsões, mantendo todas as outras fechadas. Então, esperam-se 2 s para então partir o
compressor.
O compressor fornecerá pressão até o momento em que a pressão alcance o limite
máximo estabelecido. O limite máximo estabelecido é declarado como unsigned short
prmax, conforme apêndice C. Neste momento, desliga-se o compressor, esperam-se 4 s
para então iniciar o procedimento de escape de ar, fechando-se a válvula de entrada do
82
conjunto e abrindo-se a válvula de bypass, ao mesmo tempo em que se mantém a válvula
de saída do conjunto aberta.
Com as válvulas de saída e de bypass abertas, o ar de dentro dos bolsões poderá
escapar para o ambiente, reduzindo gradativamente a pressão que está sendo
monitorada pelo sensor. A velocidade com que o ar escapa depende da obstrução da
saída por parte do controlador de fluxo. No momento em que a pressão alcança o padrão
estabelecido, a válvula de bypass é fechada e uma nova aquisição da pressão é realizada,
para que a medição seja feita com uma pressão estável.
Se a pressão medida se encontra dentro dos padrões estabelecidos, inicia-se um
procedimento de confirmação da pressão dentro dos bolsões. Se a pressão medida for
maior que a pressão estabelecida, reinicia-se o procedimento de escape do ar.
Supondo que a pressão estivesse dentro dos padrões estabelecidos, iniciar-se-ia
o procedimento de confirmação da pressão. Neste procedimento, a pressão será
verificada por um tempo de 6 s, este é o tempo de estabelecimento do sistema para
garantir a correta estabilidade da pressão dentro do conjunto de bolsões calibrado. Isso
é, caso o usuário do colchão se movimente sobre o equipamento durante a calibração,
podem existir falsas medidas de pressão, assim elimina-se a possibilidade de calibrar os
bolsões de maneira equivocada.
Se durante os 6 s ou após a contagem desse tempo o sistema verificar uma
pressão acima do estabelecido, o procedimento do escape de ar volta a acontecer. No
entanto, se depois dos 6 s a pressão se manteve estável, a válvula de saída do conjunto
em questão é fechada, mantendo a pressão dentro dos bolsões inalterável a partir deste
momento.
Logo em seguida, para limpar a linha de pressão onde são feitas as aquisições,
removendo acúmulos de pressão indesejáveis, abre-se a válvula de bypass por 3 s e
volta-se a fechá-la. Depois deste evento, a rotina é finalizada, confirmando a calibração.
A rotina da função calibrate(), que acaba de ser descrita, foi projetada baseada em um
paradigma de lógica sequencial, ou seja, pode ser representada na forma de um
GRAFCET, conforme ilustrado na figura 48. Cada etapa e transição do diagrama da
função calibrate() podem ser verificadas na tabela 2.
83
Figura 48 – GRAFCET para a função calibrate().
Fonte: Autoria Própria.
84
Tabela 2 – Etapas e Transições GRAFCET função Calibrate ( )
Sequência
Estado
Ação
1
Etapa 1 – Início
Abrir válvula de saída do grupo n
2
Transição 1
Fim da execução
3
Etapa 2
Fechar válvula de saída do grupo n
4
Transição 2
Se pressão medida dentro do padrão
5
Transição 3
Se pressão medida menor que o padrão
6
Transição 4
Se pressão medida maior que o padrão
7
Etapa 3
Abrir válvulas de entrada e saída do grupo n
8
Transição 5
Fim da execução
9
Etapa 4
Temporização de 2 s
10
Transição 6
Fim da temporização
11
Etapa 5
Ligar compressor
12
Transição 7
Se pressão medida maior que pressão máxima permitida
13
Etapa 6
Desligar compressor
14
Transição 8
Fim da execução
15
Etapa 7
Temporização de 4 s
16
Transição 9
Fim da temporização
17
Etapa 8
Fechar válvula de entrada e abrir válvula de saída do grupo n, abrindo a
18
Transição 10
válvula de bypass
Fim da execução
19
Etapa 9
Fechar válvula de bypass
20
Transição 11
Se pressão medida dentro do padrão
21
Transição 12
Se pressão medida maior que o padrão
22
Etapa 10
Temporização de 6 s
23
Transição 13
Fim da temporização
24
Etapa 11
Fechar válvula de saída do grupo n
25
Transição 14
Se pressão medida dentro do padrão
26
Transição 15
Se pressão medida maior que o padrão
27
Etapa 12
Abrir válvula de bypass
28
Transição 16
Fim da execução
29
Etapa 13
Temporização de 3s
30
Transição 17
Fim da temporização
31
Etapa 14
Fechar válvula de bypass
32
Transição 18
Fim da execução
33
Etapa 15
Fim da Execução, executa próximo conjunto (n+1)
Fonte – Autoria Própria.
85
Uma função que determina um padrão recorrente de alternância de pressão dentro
dos bolsões também foi desenvolvida. Esta função foi declarada como void pattern(),
conforme apêndice C. Nesta função, primeiro calibra-se o grupo de bolsões relacionados
à cabeça com 25 mmHg de pressão e aguardam-se 55 s. Depois, calibra-se o primeiro
dos grupos relacionados à parte posterior do corpo também com 25 mmHg, aguardam-se
outros 55 s para, em seguida, calibra-se o segundo grupo da parte posterior com 35
mmHg, aguardando-se mais 55 s. Finalmente, reduz-se a pressão deste segundo grupo
a 25 mmHg, atrasando-se 55 s e recalibrando o primeiro grupo posterior com 35 mmHg,
com mais 55s de atraso. Dessa forma, os dois grupos da parte posterior do corpo ficarão
alternando um com 25 e outro com 35 mmHg, havendo uma posterior inversão dessas
pressões.
Assim, os níveis de pressão estarão sempre mudando, mas ainda mantendo-se
abaixo dos níveis de pressão capilar, o que irá ajudar na circulação, evitando a ocorrência
das úlceras por pressão.
Na função pattern(), mais uma vez foi usada a lógica sequencial para construir esta
rotina. Seu diagrama GRAFCET pode ser visto na figura 49, suas etapas e transições
estão descritas na tabela 3.
86
Figura 49 – GRAFCET para a função pattern().
Fonte: Autoria Própria.
87
Tabela 3 – Etapas e Transições GRAFCET função Pattern( )
Sequência
Estado
Ação
1
Etapa 1 – Início
Calibrar Grupo 1 em 25 mmHg
2
Transição 1
Fim da calibração
3
Etapa 2
Temporização de 55 s
4
Transição 2
Fim da temporização
5
Etapa 3
Calibrar Grupo 2 em 25 mmHg
6
Transição 3
Fim da calibração
7
Etapa 4
Temporização de 55 s
8
Transição 4
Fim da temporização
9
Etapa 5
Calibrar Grupo 3 em 35 mmHg
10
Transição 5
Fim da calibração
11
Etapa 6
Temporização de 55 s
12
Transição 6
Fim da temporização
13
Etapa 7
Calibrar Grupo 3 em 25 mmHg
14
Transição 7
Fim da calibração
15
Etapa 8
Temporização de 55 s
16
Transição 8
Fim da temporização
17
Etapa 9
Calibrar Grupo 2 em 35 mmHg
18
Transição 9
Fim da calibração
19
Etapa 10
Temporização de 55 s
20
Transição 10
Fim da temporização
Fonte – Autoria Própria.
A funcionalidade em utilizar GRAFCET em C é permitida através da lógica de
programação, a qual caracteriza flags durante a operação, os quais serviram para indicar
em qual etapa a execução se encontra, e para onde deverá seguir. Os flags podem ser
entendidos como as transições entre as etapas de um GRAFCET.
O comportamento dinâmico dos bolsões durante a execução da função pattern()
pode ser evidenciado na figura 50, na qual são representadas as principais etapas do
acionamento e o estado dos grupos de bolsões. O grupo da cabeça (grupo 1) foi
representado em vermelho, e os grupos da parte posterior foram representados
respectivamente em verde (grupo 2) e azul (grupo 3). Primeiro, assume-se, a título
88
demonstrativo que, no instante 1 todos os grupos estão vazios. Então no instante 2 inflamse os bolsões do grupo 1 a 25 mmHg. No instante 3 infla-se também o grupo 2 a 25 mmHg.
Já no instante 4 infla-se o grupo 3 com uma pressão levemente mais alta a 35 mmHg.
Depois, no instante 5 recalibra-se o grupo 3 a fim de se obter uma pressão de 25 mmHg
em todos os bolsões do equipamento. Assim, no instante 6, a pressão nos bolsões do
grupo 2 aumenta a 35 mmHg. Finalmente, no instante 7 a pressão no grupo 2 volta a cair,
igualando-se à pressão nos demais bolsões, totalizando 25 mmHg. Ao final deste
processo, o padrão retorna ao instante 4 para reiniciar o ciclo, fazendo-se a pressão
alternar entre os grupos.
Figura 50 – Etapas de acionamento da função pattern().
Fonte: Autoria Própria.
Outras funcionalidades também foram implementadas no programa, como o
gerenciamento e exibição de textos e valores das variáveis de pressão em um display
89
LCD, a possibilidade de controlar o dispositivo utilizando uma interface com 5 botões, e
até mesmo um menu de seleção onde é possível
escolher formas de operação para
o colchão, podendo-se variar os tempos e ainda os padrões de alternância.
3.6.
SIMULAÇÃO
O arquivo hexadecimal a ser gravado no microcontrolador era primeiro gerado a
partir de um código em C pelo assembler do MikroC. Este arquivo, por sua vez, era
enviado à porta paralela do computador e gravado no dispositivo, para que este pudesse
operar de maneira satisfatória. Como gravar o microcontrolador todas as vezes em que
se deseja observar o comportamento de uma alteração mínima do código de programa é
uma tarefa extremamente morosa e que consome muito tempo, foi realizada uma
simulação do circuito original no software Protheus e dentro dessa simulação foi realizado
a maior parte do debug, para soluções dos problemas da lógica do código. Uma vez que
a lógica e as operações se mostravam corretas na simulação, então era possível gravar
o código no PIC.
O esquema de simulação utilizado no software Proteus é apresentado no
APÊNDICE D.
90
4. TESTES E RESULTADOS
4.1.
VALIDAÇÃO DO SENSOR MPX5010DP
Para calibração da pressão indicada pelo sensor MPX5010DP, faz-se necessário
comparar suas medições com pressões conhecidas. Deve-se comparar as medições do
sensor montado para validar sua precisão e identificar seu erro relativo à outro dispositivo
de medição de pressão.
Admite-se que o manômetro aneróide, utilizado no circuito pneumático, marca P.A.
Med, é um instrumento capaz de indicar pressões com exatidão aceitável. Em função de
sua aplicação na medicina, além de verificação por órgão competente, INMETRO.
Portanto, para esta calibração, este dispositivo pode ser utilizado para a comparação das
pressões medidas pelo sensor MPX5010DP.
Foram medidas as pressões indicadas pelo sensor e pelo manômetro aneróide, a
fim de verificar o erro do sensor em relação a medida conhecida do manômetro. As
medições foram feitas de duas maneiras. Primeiro, sensor e manômetro foram submetidos
à pressões de 0 a 75 mmHg, medição crescente com intervalos de 2 mmHg para o
manômetro, conforme tabela 4. Segundo, sensor e manômetro foram submetidos a
pressões de 75 a 0 mmHg, com intervalos distintos conforme tabela 5.
Os gráficos 1 e 2 apresentam as curvas, crescente e decrescente, das medições
provenientes das tabelas 4 e 5, respectivamente. Nestes gráficos, evidencia-se a variação
entre as medições de pressão de cada instrumento. As variações não ultrapassaram 4
mmHg, e no range principal de operação, entre 20 e 35 mmHg, as variações ficaram entre
2 e 3 mmHg, o que representa um erro médio de 9 % à 10 %. Para o cálculo do erro
utiliza-se da equação 10, onde
aneróide,
89" é o valor de pressão medido pelo manômetro
:" é o valor medido pelo instrumento.
:;;<=%? =
@'A*B@. *
@'A*
. 100
(10)
91
Tabela 4 – Comparação entre Manômetro e Sensor, medição crescente
Medição de pressão crescente (mmHg)
Manômetro
Aneróide
(a)
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
46
48
50
52
54
56
58
60
62
64
66
68
70
72
74
Sensor
MPX5010dp
(b)
2
4
7
9
11
13
15
17
19
21
23
25
28
30
32
34
36
39
41
43
45
47
49
52
54
56
58
61
63
66
68
69
71
74
76
Fonte – Autoria Própria.
Variação de
Pressão
(a-b)
4
4
3
3
3
3
3
3
3
3
3
3
2
2
2
2
2
1
1
1
1
1
1
0
0
0
0
-1
-1
-2
-2
-1
-1
-2
-2
Erro do
sensor
(%)
66,67%
50,00%
30,00%
25,00%
21,43%
18,75%
16,67%
15,00%
13,64%
12,50%
11,54%
10,71%
6,67%
6,25%
5,88%
5,56%
5,26%
2,50%
2,38%
2,27%
2,17%
2,08%
2,00%
0,00%
0,00%
0,00%
0,00%
-1,67%
-1,61%
-3,13%
-3,03%
-1,47%
-1,43%
-2,78%
-2,70%
92
Tabela 5 – Comparação entre Manômetro e Sensor, medição decrescente
Medição de pressão decrescente (mmHg)
Manômetro
Aneróide
(a)
72
71
68
64
61
58
54
49
47
44
42
39
38
35
33
30
28
25
22
20
17
15
12
10
8
8
6
4
4
Sensor
MPX5010dp
(b)
73
72
67
65
61
56
53
48
45
43
41
38
36
33
31
27
26
23
19
17
14
12
9
7
5
4
2
1
0
Fonte – Autoria Própria.
Variação de
Pressão
(a-b)
-1
-1
1
-1
0
2
1
1
2
1
1
1
2
2
2
3
2
2
3
3
3
3
3
3
3
4
4
3
4
Erro do
sensor
(%)
-1,39%
-1,41%
1,47%
-1,56%
0,00%
3,45%
1,85%
2,04%
4,26%
2,27%
2,38%
2,56%
5,26%
5,71%
6,06%
10,00%
7,14%
8,00%
13,64%
15,00%
17,65%
20,00%
25,00%
30,00%
37,50%
50,00%
66,67%
75,00%
100,00%
93
Comparação entre Sensor e Manômetro
Curva Decrescente
78
70
62
54
46
38
30
22
14
6
-2
2 1 1 2 1 1 1 2 2 2 3 2 2 3 3 3 3 3 3 3 4 4 3 4
-1 -1 1 -1 0
Manômetro Aneróide (a)
Sensor MPX5010dp (b)
Variação de Pressão (a-b)
Gráfico 1 – Comparação entre Sensor e Manômetro – Curva Decrescente.
Fonte – Autoria Própria.
Comparação entre Sensor e Manômetro
Curva Crescente
78
68
58
48
38
28
18
8
-2
3 4 4 3 3 3 3 3 3 3 3 3 3 2 2 2 2 2 1 1 1 1 1 1 0 0 0 0
-1 -1 -2 -2 -1 -1 -2 -2
Manômetro Aneróide (a)
Sensor MPX5010dp (b)
Variação de Pressão (a-b)
Gráfico 2 – Comparação entre Sensor e Manômetro – Curva Crescente.
Fonte – Autoria Própria.
94
4.2.
AQUISIÇÃO DE SINAIS
Uma vez montado e funcionando satisfatoriamente, o protótipo foi submetido a
repetidos ciclos de operação para realizar aquisições de sinal das portas do PIC. Com a
ajuda de um osciloscópio, verificou-se o comportamento dinâmico do sistema. O
osciloscópio utilizado para as medições foi o Agilent DSO1052B. Este dispositivo conta
com dois canais de aquisição, com os quais se pôde obter oscilografias exibindo o
comportamento de um componente específico do sistema em relação à pressão.
Para se fazer uma aquisição, representando a resposta da pressão e a do
compressor, ligou-se um canal do osciloscópio no pino de saída do sinal do sensor que
se ligava no conversor A/D do PIC e o outro canal, no pino do microcontrolador que
controlava o compressor.
Figura 51 – Sinal de Tensão do Sensor de Pressão & Saída digital para
Compressor.
Fonte: Autoria Própria.
A figura 51 evidencia o comportamento da curva de pressão, entrada de tensão do
conversor A/D, canal 1 do osciloscópio, em relação ao funcionamento do compressor,
saída da porta digital do PIC, canal 2 do osciloscópio. Deve-se lembrar que devido a lógica
95
inversa do módulo de relés, um nível de tensão zero, no canal 2, significa ligado e nível
de tensão de 5 V significa desligado. Por meio dessa forma de onda, desta verifica-se que
o aumento da pressão não ocorre de maneira linear. Inicialmente, verifica-se maior
resistência da planta a alterar a pressão interna do conjunto de câmaras.
A operação do sistema consiste em verificar a pressão contida no interior do
conjunto de bolsões e caso esteja abaixo do setpoint de pressão estabelecido, neste caso
25 mmHg, deve-se encher o bolsão até um pressão máxima, neste caso, 45 mmHg, para,
então, desligar o compressor e corrigir a pressão através da válvula bypass.
A figura 52 evidencia que a tensão mínima durante o processo de enchimento dos
bolsões foi de 0,92 V, que equivale a 15,3 mmHg, pressão contida inicialmente no
conjunto de bolsões, portanto ocorreu o acionamento do compressor. O canal 1 do
osciloscópio apresenta o nível de tensão da porta A/D do PIC, enquanto o canal 2
apresenta o nível de tensão da porta digital para o compressor. O compressor
permaneceu ligado até que a tensão medida fosse superior a tensão correspondente a
pressão máxima. A tensão máxima atingida foi de 2,92 V ou 48,7 mmHg, superior à 45
mmHg, portanto, o compressor é desligado, voltando a nível lógico 1 (5 V), desligado.
Figura 52 – Sinal de Tensão do Sensor de Pressão & Saída digital para
Compressor – Tensão mínima e máxima.
Fonte: Autoria Própria.
96
A figura 53 evidencia a pequena queda de tensão devido à abertura do elemento
de controle, a válvula bypass. Este elemento de controle permanece ligado até que a
pressão interna dos bolsões fique dentro do range de 21 a 29 mmHg. O canal 1 do
osciloscópio apresenta o nível de tensão da porta A/D do PIC, enquanto o canal 2
apresenta o nível de tensão da porta digital para o compressor. No ponto A, o nível de
tensão na entrada do conversor A/D era de 2,0 V, equivalente a 33,3 mmHg, em B após
a abertura e fechamento da válvula bypass, o nível de tensão deste ponto passou para
1,84 V, equivalente à 30,7 mmHg.
Figura 53 – Sinal de Tensão do Sensor de Pressão & Saída digital
para Compressor – Acionamento da válvula de bypass.
Fonte: Autoria Própria.
A figura 54 apresenta a amplitude da variação da pressão já estável, devido à
flutuações na medição do sensor. Esta variação tem amplitude de 240 mV (4 mmHg) entre
o ponto A, 1,6 V (26,7 mmHg) e o ponto B, 1,84 V (30,7 mmHg). Para tal, o valor médio
da medição é de 1,72 V ou 28,7 mmHg. O canal 1 do osciloscópio apresenta o nível de
tensão da porta A/D do PIC, enquanto o canal 2 apresenta o nível de tensão da porta
digital para o compressor.
97
Figura 54 – Sinal de Tensão do Sensor de Pressão & Saída digital
para Compressor – Amplitude da medição.
Fonte: Autoria Própria.
A fim de evidenciar o comportamento da válvula bypass, um canal permaneceu
ligado no sensor, enquanto o outro canal foi desligado do pino do PIC que acionava o
compressor e foi ligado no pino que acionava esta válvula.
A figura 55 apresenta o comportamento da pressão quando o a válvula de bypass
era acionada. Nota-se que existe uma pequena queda na pressão, no momento em que
esta válvula bypass é aberta junto da válvula de saída do conjunto. A queda observada
foi de 2,16 V (36 mmHg) para 2,04 V (34 mmHg), medição nos picos de tensão, e o tempo
de permanência da válvula aberta, foi de 2,4 s. O canal 1 do osciloscópio apresenta o
nível de tensão da porta A/D do PIC, enquanto o canal 2 apresenta o nível de tensão da
porta digital para a válvula bypass.
98
Figura 55 – Sinal de Tensão do Sensor de Pressão & Saída digital
para Válvula bypass – Tempo da Válvula Aberta.
Fonte: Autoria Própria.
Mais um aspecto relevante foi o atraso existente entre o acionamento de duas
válvulas consecutivas. Para isso, um canal foi ligado no pino de acionamento de uma
válvula de entrada, e o outro canal foi ligado no pino de uma válvula de saída que deve
ser acionada imediatamente depois da primeira.
O acionamento das válvulas baseou-se na criação da função exec(), conforme
descrição do desenvolvimento do firmware, a qual busca evitar a alta corrente de inrush
na fonte ATX. Como descrito anteriormente no código C do firmware, o tempo de
acionamento entre as válvulas deve ser de 262 ms. As figuras 56 e 57 apresentam o
tempo medido entre o acionamento e o desligamento das válvulas durante a função
startup( ). O canal 1 do osciloscópio apresenta o nível de tensão da porta digital para a
válvula de entrada, enquanto o canal 2 apresenta o nível de tensão da porta digital para
a válvula de saída. Verificou-se que o tempo de acionamento entre as válvulas foi de 288
ms.
99
Figura 56 – Sinal de Tensão Válvula de Entrada e Válvula de
Saída do conjunto de bolsões.
Fonte: Autoria Própria.
Figura 57 – Sinal de Tensão Válvula de Entrada e
Válvula de Saída do conjunto de bolsões – Atraso no
acionamento.
Fonte: Autoria Própria.
100
O comportamento das válvulas de entrada, saída e bypass ao longo da função
calibrate() é evidenciado nas figuras 58, 59 e 61.
Na figura 58, o canal 1 apresenta o sinal na entrada do conversor A/D do PIC e o
canal 2 apresenta o nível de tensão da porta lógica da válvula bypass. Como discutido
anteriormente, a válvula bypass dever permanecer fechada durante todo o tempo de
enchimento dos bolsões. Abrindo por 2 s, após o desligamento do compressor, para
controlar a redução da pressão do conjunto de bolsões. E então, após a conclusão da
função para liberar a pressão contida no trecho de linha utilizado para medir a pressão,
por esse motivo a pressão cai a zero.
Figura 58 – Sinal de Tensão do Sensor de Pressão & Saída digital
para Válvula bypass – função calibrate( ).
Fonte: Autoria Própria.
Depois, foi interessante registrar paralelamente o acionamento das válvulas de
entrada e saída. Para tanto, um canal foi ligado no pino de acionamento de uma válvula
de entrada, e o outro canal foi ligado no pino de uma válvula de saída.
Na figura 59, o canal 1 apresenta o sinal da saída digital para a válvula de saída e
o canal 2 apresenta o sinal da saída digital para a válvula de entrada. No momento de
inicialização do sistema, há o acionamento de ambas as válvulas através da função
101
startup(), verificado pelas bordas de descida indicadas abaixo do indicador horizontal de
trigger do osciloscópio, e as bordas de subida que determinam o fim desta função. A
função calibrate() inicia-se na segunda borda de subida, a válvula de entrada permanece
fechada, enquanto a válvula de saída é acionada, por 2 s conforme figura 60, para verificar
a pressão no grupo de bolsões. Após verificada a tensão, a válvula de saída é fechada e
então ambas são acionadas para o processo de enchimento dos bolsões. O fim do
processo de enchimento é verificado pelo fechamento da válvula de entrada, terceira
borda de subida do canal 2. E o final do período de estabelecimento da tensão é percebido
com o fechamento da válvula de saída, na quarta borda de subida do canal 1.
Figura 59 – Sinal de Tensão das Saídas digitais para as Válvulas
de entrada e saída. – função calibrate( ).
Fonte: Autoria Própria.
O comportamento da válvula de bypass em relação com a válvula de saída é uma
importante aquisição. Assim, tomou-se o canal do osciloscópio ligado na válvula de
entrada, ligando-o no pino responsável pela válvula de bypass.
102
Figura 60 – Sinal de Tensão das Saídas digitais para
as Válvulas de entrada e saída – tempo de medição
da pressão.
Fonte: Autoria Própria.
Na figura 61, o canal 1 apresenta o sinal da saída digital para a válvula de saída e
o canal 2 apresenta o sinal da saída digital para a válvula bypass. No momento de
inicialização do sistema, há o acionamento de ambas as válvulas através da função
startup(). O atraso gerado pela função exec() é evidenciado entre a primeira borda de
descida do canal 1 e a primeira borda de descida do canal 2, pois, a válvula de saída é a
segunda válvula acionada, enquanto a válvula bypass é a sétima a ser acionada.
A segunda e a terceira bordas de descida do canal 2, representam o acionamento
da válvula bypass para reduzir a pressão do conjunto de bolsões até a pressão
estabelecida.
103
Figura 61 – Sinal de Tensão das Saídas digitais para as Válvulas
de saída e bypass – função calibrate( ).
Fonte: Autoria Própria.
O tempo de estabelecimento da pressão proposto para o sistema é de 6 s,
conforme descrito no desenvolvimento do firmware. Na figura 61 é possível determinar
este período como o tempo entre a quarta borda de subida do canal 2, fechamento da
válvula bypass, e a quarta borda de subida do canal 1, fechamento da válvula de saída
do conjunto de bolsões.
No momento em que o compressor é desligado, o comportamento da pressão
apresenta uma variação brusca. Compreende-se que neste momento, mesmo que em
menor escala é evidenciado um Golpe de Aríete. Este ocorre devido a parada repentina
do compressor. A onda de choque gerada caminha pelo circuito pneumático, chocandose contra as paredes das mangueiras, válvulas e afetando o funcionamento do sensor.
Este efeito dura cerca de 2,26 s, tendo uma amplitude de cerca de 1,32 V (22 mmHg),
pode-se verificá-lo nas figuras 62 e 63. Observa-se, neste caso, o sensor ligado ao canal
1 e o pino de acionamento do compressor no canal 2.
104
Figura 62 – Sinal de Tensão da entrada do Conversor A/D –
Golpe de Aríete, período de estabilização da pressão.
Fonte: Autoria Própria.
Figura 63 – Sinal de Tensão da entrada do Conversor A/D – Golpe de
Aríete, amplitude da tensão.
Fonte: Autoria Própria.
105
Neste momento, dependendo de como o firmware é programado, pode-se
acarretar medições enganosas, fazendo com que o programa interprete que a pressão é
maior do que a pressão supostamente estável.
Na figura 64, foi registrado o desligamento do compressor por um tempo
prolongado, tentando verificar alguma eventual variação no momento do fechamento da
válvula de entrada do conjunto. Realmente, só se observa mudanças na pressão depois
de 5,52 s, que é o momento no qual a válvula de bypass se abre, deixando escapar um
pouco da pressão.
Figura 64 – Sinal de Tensão da entrada do Conversor A/D – Golpe de Aríete e
abertura da válvula bypass.
Fonte: Autoria Própria.
106
5. CONCLUSÕES
Neste trabalho, foi descrito o desenvolvimento de um sistema microcontrolado para
controle de pressão em colchões a ar e trocas de pontos de apoio.
Os modos de operação determinados inicialmente puderam ser alcançados através
da utilização de rotinas com lógicas sequenciais. As funções calibrate () e pattern()
sintetizam os dois objetivos propostos pelo trabalho. Nestas funções, pode-se determinar
os níveis de pressão de cada grupo de bolsão criado e também submetê-los a rotinas de
operação específicas com o intuito de realizar as trocas dos pontos de apoio do corpo
suspenso sobre o colchão.
Durante o decorrer da programação do firmware para a operação do protótipo
foram notados inúmeros mal funcionamentos inesperados com relação ao comportamento
do PIC. Em diversas situações as funções programadas em C, no MikroC, não
respondiam como o esperado ou ainda não retornavam valores de maneira consistente.
Estas situações adversas no código levaram à adoção de algumas medidas que
remediaram o funcionamento do programa, mas que não são as práticas mais
recomendadas para uma programação robusta e clara. Entre essas medidas, estão a
utilização de uma grande quantidade de variáveis globais e também o uso de inúmeros
flags para a operação de funções. Embora essas medidas tenham comprometido a
harmonia do código e violassem as boas práticas de programação, foram as únicas
formas de solucionar estas inconsistências encontradas durante a montagem do projeto,
que apesar disso, operou com sucesso.
Outra fonte de problemas recorrentes foi a limitada memória de programa do
microcontrolador escolhido. Inicialmente esta limitação não se mostrou problemática,
mas, à medida que o código do programa crescia e funções mais complexas e mais
variáveis eram usadas, esta limitação se mostrou um problema preponderante. Uma vez
que se excede a memória de programa, o comportamento do PIC torna-se totalmente
errático e aleatório, não respondendo da maneira esperada, de tal forma que não é
possível, pela análise do código em C determinar a origem destes comportamentos, o que
torna o processo de debug extremamente frustrante e cansativo.
107
Depois desta situação se tornar ciente aos alunos, foi necessário modificar algumas
partes do código, para que não se excedesse mais a memória de programa. Em uma
análise mais aprofundada, foi possível detectar que a remoção de uma única variável do
tipo float presente no programa com o intuito de armazenar os valores medidos de pressão
com mais exatidão, livrou uma parte considerável da memória de programa, cerca de
10%. Foi necessário remover certas funções da programação, pois, estas também
ocupavam boa parte da memória. Com isso, foram removidas funções que não iriam
impactar de forma tão significativa na operação do protótipo, como por exemplo, a função
de um menu de seleção e uma função para a interface com os botões.
Embora o protótipo tenha operado plenamente sem estas funções, tais comandos
trariam um diferencial para o projeto, tornando-o muito mais flexível e interativo com o
usuário, mas infelizmente não puderam ser usados devido à escassez de memória do
PIC. Além de tudo, um último problema, este bastante relevante foi observado com
relação à programação.
Dependendo do número estruturas de seleção (ifs) e de repetição (whiles) que
eram usadas umas dentro das outras (ifs aninhados) ocorria o estouro da pilha do
microcontrolador, o que inviabilizava completamente a utilização do código para a
operação. Houve a necessidade de se escrever o código sempre pensando em tal
limitação da pilha, jamais se podendo ultrapassar o seu limite máximo. Com isso, foi
concluído que, apesar do protótipo montado nos experimentos ter operado com sucesso,
para se acionar um equipamento que possuísse todas as funcionalidades inicialmente
imaginadas, mas que não puderam ser implementadas devido às limitações descritas,
dever-se-ia considerar a utilização de um microcontrolador mais robusto e de maior
capacidade que o PIC16F877A.
Com isso, seria possível construir um equipamento completo e totalmente
configurável pelo usuário sem os inconvenientes da limitação da memória e da grande
quantidade de erros inesperados observados.
Apesar das dificuldades encontradas, caso queira-se implementar somente o modo
de operação do colchão, a resposta é satisfatória.
A fonte ATX utilizada alimentava tanto o circuito do microcontrolador com 5 V como
o circuito das válvulas com 12 V. Esta deveria suprir a demanda de corrente requisitada
108
pelo acionamento das válvulas em 12 V, uma vez que tal dispositivo poderia fornecer 450
W. Mas como foi citado, foi observado que ao se acionar uma válvula, existe uma certa
corrente de inrush maior que a corrente nominal, e, quando todas as válvulas eram
acionadas simultaneamente o somatório das correntes de inrush mais elevadas fazia com
que a fonte reiniciasse por segurança, desligando tanto as válvulas quanto o circuito de
comando do microcontrolador e portanto reiniciando a execução do programa.
Como descrito anteriormente, o problema foi solucionado não permitindo o
acionamento simultâneo das válvulas, sendo que sempre existe um tempo de 262 ms
entre o acionamento de cada uma, tempo este, necessário para a extinção das correntes
de inrush, fazendo com que a fonte não mais desligasse. Dessa forma, notou-se que,
embora as fontes ATX sejam extremamente práticas quando se está trabalhando com
níveis variados de tensão, existe uma certa limitação quanto à demanda máxima de
corrente, mesmo que a corrente requisitada não exceda a potência nominal da fonte.
Com isso, é notável que para uma operação mais eficiente de todo o protótipo,
seria interessante sobredimensionar a potência da fonte ATX utilizada, ou mesmo
procurar uma outra solução mais específica para a alimentação dos variados níveis de
tensão necessários para o projeto. Deste modo o sistema poderia operar com mais de
uma atividade simultaneamente como encher ou esvaziar os grupos de bolsões, sem a
necessidade da lógica sequencial.
Para a montagem do corpo do colchão, foi utilizado um conjunto de câmaras de ar
para pneus de bicicleta. Estas câmaras serviram como bolsão para armazenamento de ar
e alternância de pressão sobre o indivíduo acamado. Não apresentaram vazamentos
quando cheias.
Embora tenham se mostrado uma solução perfeitamente cabível para a montagem
do protótipo, elas apresentavam alguns inconvenientes como não possuírem um conector
pneumático compatível com o modelo de conexões pneumáticas industriais utilizadas no
projeto.
Para solucionar o primeiro problema, instalaram-se conectores que agiam como
um adaptador entre o padrão de conexões da câmara e o padrão industrial utilizado. Estes
adaptadores se mostravam a um preço acessível, no entanto, quando se escolheu ter um
conjunto com um número grande de câmaras, o orçamento ficou mais elevado.
109
Em algumas ocasiões, pelo posicionamento das câmaras na estrutura em que
foram montadas, estas não respondiam à entrada e à saída de ar quando requisitadas.
Este problema não foi completamente solucionado devido à forma em que as câmaras
eram posicionadas. O máximo que se podia fazer era movê-las de tal forma que o ar
pudesse escoar com maior facilidade. Este não foi um problema significativo na operação,
visto que podia ser solucionado verificando quais câmaras estavam nesta condição e
movendo-as e também porque o número de câmaras que apresentavam este
inconveniente era mínimo.
Assim, para a melhoria deste equipamento, faz-se necessário pesquisar algum
substituto para as câmaras de pneu de bicicleta usadas no corpo do colchão que, apesar
de provarem o conceito, podendo-se observar a resposta dos bolsões às pressões
exercidas, precisam de adaptações extras e obstruem eventualmente a passagem do ar.
O restante dos componentes correspondeu muito bem às expectativas de
operação do protótipo. O compressor, além de compacto e de baixo custo, apresenta peso
muito reduzido, é extremamente silencioso e possui uma potência mais do que suficiente
para fornecer pressão para o sistema.
As válvulas funcionaram perfeitamente bem. O único inconveniente foi a corrente
de inrush, mas que foi facilmente corrigida mudando a programação do microcontrolador.
Os módulos de relés, apesar de usarem lógica inversa para acionamento, que foi
posteriormente corrigida pelo microcontrolador também foram utilizados sem maiores
problemas.
A resposta do sensor escolhido foi bastante próxima ao observado no manômetro,
mostrando uma confiabilidade razoável para a aquisição da pressão.
Apesar de terem sido implementadas via software e simuladas, as funcionalidade
da interface com os botões e o menu de seleção não foram implementadas no hardware.
O PIC possui uma memória extremamente limitada, não permitindo rodar um código
completamente integrado.
No entanto, isso não afetou a operação final do protótipo, visto que apesar de tais
funcionalidades tornarem o equipamento muito mais interativo, não influenciavam na
atuação das válvulas e dos compressores (componentes estes fundamentais). Por isso,
foi gravado no PIC um programa que operava de maneira eficaz, porém sem possibilidade
110
de alterar os tempos ou padrões de alternância de outra forma que não fosse regravando
o microcontrolador.
111
REFERÊNCIAS BIBLIOGRÁFICAS
ABNT NBR IEC 60529:2005. Graus de proteção para invólucros de equipamentos
elétricos (código IP). 40 páginas. Associação Brasileira de Normas Técnicas. Rio de
Janeiro – RJ. 2005
ABREU, Miucha Américo Gomes Miyasiro de. Desenvolvimento de um sistema com
colchão pneumático eletronicamente controlado para prevenção de úlcera de
pressão. 57 f. Dissertação (Mestrado em Engenharia Biomédica) - Universidade de Mogi
das Cruzes, 2010.
AKASA – Superb Design Engineering. Power Supply Units. Disponível em: <
http://www.akasa.com.tw/update.php?tpl=product/product.detail.tpl&no=181&type=Powe
r%20supplies&type_sub=Standard&model=AK-P350PG >. Acesso em 18 /03/2013 às
10:00
ASCOVAL. Catálogo Geral, Catálogo 31B. Linha controle de Fluídos. Válvulas
Solenóide, Válvulas Operadas a Ar. Ascoval Indústria e Comércio Ltda. Maio de 2011.
144 páginas.
ATLAS COPCO BRASILEIRA S/A. Manual de Instalação de Compressores. 99. 1972
BARBI, Ivo. Eletrônica de potência: projetos de fontes chaveadas. Florianópolis: Ed.
do Autor, 2001. 332 p.
BEAR, Mark F., CONNORS, Barry W. & PARADISO, Michael A. Neurociências,
desvendando o Sistema Nervoso. 2. ed. Porto alegre: Artmed, 2002. 855 p.
BRADEN B, BERGSTROM N. A conceptual schema for the study of the etiology of
pressure sore. Rehab Nurs 1987 jan-fev;12(1): 8-12.
112
BRYANT RA. Acute e chronic wounds – nursing management. 2 ed. St. Louis: Mosby;
2000.
CASARE, Leandro Vidotto. Faculdade de Engenharia de Sorocaba. Aplicações de
Microcontroladores. Disponível em:
< http://facens.br/site/ensino/projetos/microcont_leandro/index.htm >. Acesso em 29 de
abril de 2013 as 15 h 00 min
COSTA, I. G. Incidência de úlcera de pressão e fatores de risco relacionados em
pacientes de um Centro de Terapia Intensiva. Ribeirão Preto, 2003. 133p. Dissertação
(Mestrado) Escola de enfermagem de Ribeirão Preto, Universidade de São Paulo.
CUNHA, José Cardoso e, ASC, Arquitetura de Sistemas Computacionais.
Departamento de Informática. Faculdade de Ciências e Tecnologia. Universidade Nova
de Lisboa. Disponível em: < http://www-asc.di.fct.unl.pt/asc1/extra/aula4.pdf >. Acesso em
10 de março de 2013.
DEPPERT,
Werner;
STOLL,
K..
Dispositivos
neumáticos:
introducción
y
fundamentos. Tradução de Pneumatische Steuerungen Kurz und bündig por Cayetano
Cabrera. Barcelona: Marcombo, c1978. 191 p. ISBN 84-267-0280-5
Dicionário Larousse escolar da língua portuguesa. São Paulo: Larousse do Brasil, 2004.
800 p. ISBN 8576350394.
DIETRICK, R.B.; RUSSI, S.: Tabulation and review of autopsy findings in fifty-five
paraplegics. J.A.M.A., n. 166, p. 41-44, 1958.
Electronics-Tutorials. Disponível em: < http://www.electronics-tutorials.ws >. Acesso em
29 de abril de 2013 as 15 h 00 min
113
European Pressure Ulcer Advisory Panel and National Pressure Ulcer Advisory Panel.
Treatment of pressure ulcers: Quick Reference Guide. Washington DC: National
Pressure Ulcer Advisory Panel; 2009.
FISHBEIN, Morris. Enciclopédia Familiar da Medicina e Saúde. 4ª Ed. Encyclopaedia
Britannica do Brasil – Publicações Ltda, 1966.
GÖDKE, Francisco. Sistemas dinâmicos para evitar úlceras de pressão. Curitiba,
2003. 83 p. Dissertação de Mestrado – CEFET – PR. Curso de Pós-Graduação em
Engenharia Elétrica e Informática Industrial.
GOULART, Fernanda Maria; FERREIRA, Juliana Assis; SANTOS, Katiúscia Aparecida de
Almeida; MORAIS, Valéria Mourão. Prevenção de úlcera por pressão em pacientes
acamados: uma revisão da literatura. Rev Objetiva. 2008;4:85-97.
HEXUS.
Power
Supply
Units.
Disponível
em:
<http://hexus.net/tech/tech-
explained/psu/32105-psus-power-supply-units/>. Acesso em 18/03/2013 às 10:00
ICE – Investigação Científica em Enfermagem. Escala de Braden para Avaliação do
Risco de Úlceras de Pressão Disponível em:
< http://ice-mac.org/pdf/escala_de_braden.pdf >. Acesso em 27 de abril de 2013 às 10 h
00 min.
INCA – Instituto Nacional de Câncer. Guia do cuidador de pacientes acamados – Rio
de Janeiro. Ministério da Saúde. 2ª Ed. 16 p. INCA, 2010.
INSTITUTO NEWTON C. BRAGA LTDA. Como usar sensores de pressão (MEC008)
Disponível em: < http://www.newtoncbraga.com.br/index.php/automacao-industrial/3849mec088 >. Acesso em 30 de julho de 2013 às 23 h 00 min
114
KRASNER, D. Pressure ulcer; assessment, classification and management. In:
_____. Chronic wound care, 2ª ed. Wayne: Health Management, p.52-7, 1997.
LABCENTER.
Proteus
VSM
-
Overview
Disponível
em:
<
http://www.labcenter.com/products/vsm/vsm_overview.cfm>. Acesso em 11 de abril de
2013 às 20 h 00 min
LELUDAK, Jorge Assade. Acionamentos eletropneumáticos. Curitiba: Base Livros
Didáticos, 2009. 176 p. (Curso técnico em eletrotécnica. Módulo 4 Livro 18) ISBN
978857905047-3.
LIMA, Angela Cristina Beck; GUERRA, Diana Mendonça. Avaliação do custo do
tratamento de úlceras por pressão em pacientes hospitalizados usando curativos
industrializados. Ciênc. saúde coletiva, Rio de Janeiro, v. 16, n. 1, Jan. 2011 .
Disponível
em:
<
http://www.scielo.br/scielo.php?script=sci_arttext&pid=S1413-
81232011000100029&lng=en&nrm=iso >. Acesso em 18 de março de 2013.
LUZ, Sheila Rampazzo; LOPACINSKI, André Cleocir; FRAGA, Rogério de; URBAN,
Cícero de Andrade. Úlceras de Pressão. Pressure Ulcers. Artigo de Atualização. 8 f.
Curitiba. 2010.
MEDEIROS, Adriana Bessa Fernandes Úlcera por pressão em idosos hospitalizados:
análise da prevalência e fatores de risco. Fortaleza. 2006. 125p.
MIKROELEKTRONIKA. MikroC PRO Disponível em: < http://www.mikroe.com/mikroc/pic/
>. Acesso em 29 de abril de 2013 às 15 h 00 min
MOTOROLA, Inc. Integrated Silicon Pressure Sensor On-chip Signal Conditioned,
Temperature
Compensated
and
Calibrated
Semiconductor Techinical Data. 1997. 10 p
–
MPX5010
Series.
Motorola
115
NAGEH. Manual de Indicadores de enfermagem. Programa de Qualidade Hospitalar
(CQH). São Paulo: APM/CREMESP, 2006. 40p.
National
Wound
Care.
NWC-6000ET
Advanced
Kinetic.
Disponível
em:
<
http://www.nationalwound.com >. Acesso em 11 de abril de 2013 às 23 h 00 min
NPUAP - National Pressure Ulcer Advisory Panel. Conceito e classificação de úlcera
por pressão: atualização do NPUAP. Revista Estima. 2007;5(3):43-4.
NPUAP - National Pressure Ulcer Advisory Panel. Pressure Ulcer – Prevention Points.
1 f. 2007. Disponível em: <www.npuap.org >. Acesso em: 22 de setembro de 2011.
NPUAP - National Pressure Ulcer Advisory Panel. Pressure Ulcer Definition and Stages.
1 f. 2007. Washington DC. Disponível em: <www.npuap.org >. Acesso em: 22 de setembro
de 2011.
NUSSENZVEIG, Herch Moysés. Curso de Física básica – vol. 2 / H Moysés
Nussenzveig – 4ª Edição rev. – São Paulo: Blucher, 2002.
PAIVA, Lucila Corsino de. Úlcera de pressão em pacientes internados em um hospital
universitário em Natal/RN: condições predisponentes e fatores de risco. Lucila
Corsino de Paiva. - Natal, [RN], 2008. 99 f.
PRATA, Stephen. C++ primer plus. 5th ed. Indianapolis, IN: Sams, c. 2005. 1224 p. ISBN
0672326973
Pressure Ulcer Basics. A guide to pressure ulcer prevention for residential aged care
workers. Disponível em:
< http://www.health.vic.gov.au/learning/pressureulcers/pu_basics_workers/module-1-anintroduction-to-pressure-areas/4 >. Acesso em 01 de agosto de 2013 às 20 h 00 min
116
QUEIROZ, Vivian Turola de. Úlcera por Pressão em Idoso Frágil. 2010. 27 f. Monografia
(Especialização em Gerontologia) – Programa de Pós-Graduação, Universidade
Tecnológica Federal do Paraná. Cornélio Procópio, 2010.
RALSTON, Randin; CHAVES, Alex; STEPHEN, McCarthy; JOHNSTON; Stephen;
MOUTAFIS, Timothy & BERTONI; David. Pressure Redistribution Medical Matress –
Reactive Support Surfaces. Massachusetts Medical Device Development Center &
Theratorr Medical, INC. 2011. 10 p.
RASHID, M. H. Eletrônica de potência: circuitos, dispositivos e aplicações. São
Paulo, SP: Makron, c1999. xxvi, 828 p. ISBN 853460598X
RNAO. Registered Nurses’ Association of Ontario - Risk assessment and prevention of
pressure ulcers. Toronto, Canada: Registered Nurses’ Association of Ontario. Disponível
em
< http://rnao.ca/sites/rnao-ca/files/Risk_Assessment_and_Prevention_of_Pressure_Ulcers.pdf >
ROHO GROUP. BariSelect® Bariatric Mattress Replacement System. Disponível em:
< http://www.therohogroup.com >. Acesso em 11 de abril de 2013 às 23 h 00 min
SCHRADER
BELLOWS
Princípios
básicos,
produção,
distribuição
e
condicionamento do ar comprimido. Belo Horizonte: Schrader Bellows Indústria &
Comércio. 1987. 103 p.
SHAI A., MAIBACH H.I. Wound healing and ulcers of the skin: diagnosis and
therapy—the practical approach. New York: Springer-Verlag, 2005
SILVA, Maria do Socorro Moura Lins. Fatores de risco para úlcera de pressão em
pacientes hospitalizado. Dissertação de Mestrado em Enfermagem, Área de
concentração em Enfermagem de Saúde Pública. Centro de Ciências da Saúde.
117
Universidade
Federal
da
Paraíba
–
1998.
Disponível
em:
<
http://www.feridologo.com.br/teseup.htm >. Acesso em 30 de setembro de 2011.
SOUZA, David José de. Desbravando o PIC: baseado no microcontrolador PIC16F84.
4. ed. São Paulo: Érica, 2001. 200 p. ISBN 85-7194-686-8.
SQUIRREL MEDICAL. Diamond SDII da Squirrel Medical. Disponível em: <
http://www.squirrelmedical.co.uk >. Acesso em 11 de abril de 2013 às 23 h 00 min
TheraTorr Medical. Disponível em: < http://www.theratorr.com >. Acesso em 11 de abril
de 2013 as 23 h 00 min
TIPLER, Paul Allen; MOSCA, Gene. Física: para cientistas e engenheiros. 5. ed. Rio
de Janeiro, RJ: LTC, 2006. 3 v.
ULABY, Fawwaz T. Eletromagnetismo para engenheiros. Porto Alegre: Bookman,
2007. 378 p. ISBN 9788560031191.
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ. Normas para elaboração de
trabalhos acadêmicos, Comissão de Normalização de Trabalhos Acadêmicos.
Curitiba: UTFPR, 2008.
VIEIRA, D. F. V. B. ; SOTTOMAIOR, Valeria S. ; HECKLER, S. . Prevenção e Tratamento
de úlcera de pressão. In: Werther Brunow de Carvalho; Glauco Arieno Whestphal. (Org.).
PROAMI - Programa de atualização em medicina intensiva. Porto Alegre, 2008, v. 5, p. 957.
WADA A, TEIXEIRA Neto N, FERREIRA MC. Úlceras por pressão. Rev Med (São
Paulo). 2010.
118
WALENIA, Paulo Sérgio. Proposta de implementação do Curso de Engenharia
Industrial Elétrica ênfase Automação. Universidade Tecnológica Federal do Paraná.
2006
ZANCO, Wagner da Silva. Microcontroladores PIC16F628A/648A: uma abordagem
pratica e objetiva. São Paulo: Érica, c2005. 364 p. ISBN 853650059X.
ZELENOVSKY, Ricardo; MENDONÇA, Alexandre. Microcontroladores: programação e
projeto com a família 8051. Rio de Janeiro, RJ: MZ, 2005. xvi, 447 p. ISBN 8587385127.
119
APÊNDICE A
Datasheet Compressor Tecumseh, modelo: AZA1335DDS
120
APÊNDICE B
Datasheet sensor MPX5010DP
121
APÊNDICE C
unsigned short padrao=1, tempo=1, me1=1, me2=1,mflag=0,a=0, pflag=0,vflag=0;
unsigned short atimer1=0,atimer2=0,atimer3=0;//Variáveis para os timers
unsigned short flag=0,tflag=0;
unsigned short uk=0,rk=0,dk=0,lk=0,ek=0,uf=0,rf=0,df=0,lf=0,ef=0; //Variáveis para os botões
/*
LISTA DE VARIÁVEIS
padrao -> guarda informação de qual padrão está sendo usado
tempo -> guarda informação de qual tempo de acionamento está sendo usado
me1, me2, mflag -> variável auxiliar para controlar o menu
a -> variável auxiliar para controlar as operações de cada grupo de bolsão
pflag -> variável auxiliar para controlar as operações de calibração
vflag -> variável auxiliar para controlar as operações de cada um dos atuadores
atimer1,atimer2,atimer3 -> variáveis auxiliares usadas na temporização
flag -> os bits desta variável guardam flags distintos
flag.F0 -> flag de confirmação de execução de operação dos atuadores
flag.F2 -> flag de confirmação de calibração de um grupo de bolsões
flag.F3 -> flag de temporização para acionamento dos atuadores
tflag -> flag de temporização para a função de tempo genérica
uk,rk,dk,lk,ek -> monitoram respectivamente o estado dos botões para cima, para direita, para baixo, para esquerda e
enter da interface
uf,rf,df,lf,ef -> retornam respectivamente a borda de subida dos botões para cima, para direita, para baixo, para esquerda
e enter da interface
*/
//Inicialização das variáveis do LCD
//Funções do LCD utilizadas da biblioteca nativa do MikroC
sbit LCD_RS at RB4_bit;
sbit LCD_EN at RB5_bit;
sbit LCD_D4 at RB0_bit;
sbit LCD_D5 at RB1_bit;
sbit LCD_D6 at RB2_bit;
sbit LCD_D7 at RB3_bit;
sbit LCD_RS_Direction at TRISB4_bit;
sbit LCD_EN_Direction at TRISB5_bit;
sbit LCD_D4_Direction at TRISB0_bit;
sbit LCD_D5_Direction at TRISB1_bit;
sbit LCD_D6_Direction at TRISB2_bit;
sbit LCD_D7_Direction at TRISB3_bit;
//Declaração das variáveis de estado das válvulas e do compressor
//1-aberto/acionado 0-fechado/desligado
//vin[n] para a válvula de entrada do n-ésimo conjunto de bolsões
//vout[n] para a válvula de saída do n-ésimo conjunto de bolsões
//vbp para a válvula de bypass
//comp para o compressor
unsigned short vin[3],vout[3];
bit vbp,comp;
122
//Função para fechar todas as válvulas
void close_all_valves()
{
unsigned short i;
for(i=0;i<=2;i++)
{
vin[i]=0;
vout[i]=0;
}
vbp=0;
}
//Função para abrir todas as válvulas
void open_all_valves()
{
unsigned short i;
for(i=0;i<=2;i++)
{
vin[i]=1;
vout[i]=1;
}
vbp=1;
}
//Função para calcular o tempo de acionamento entre válvulas
//Necessária para evitar corrente de inrush muito alta ao ligar todas as válvulas de uma vez
//Utiliza o TIMER1 do PIC
//PIR1.TMR1IF é o flag do PIC que retorna a temporização
void timerv()
{
if(PIR1.TMR1IF)
{
PIR1.TMR1IF=0;
flag.F3=1;
}
}
//Função que executa abertura/fechamento das válvulas e ligamento/desligamento docompressor
//flag.F3 é o flag que retorna a temporização concluída da função timerv()
//vflag é a variável que controla qual dos atuadores está sendo ligado/desligado
//cada vez que timerv() é temporizado, fazendo flag.F3=1, a variável vflag é incrementada, verificando o próximo atuador
//o valor lógico na porta do PIC deve ser invertido pois o módulo de relés opera em lógica inversa
void exec()
{
timerv();
if(flag.F3==1)
{
flag.F3=0;
vflag++;
}
if(vflag==0){
PORTC.F0=vin[0];
PORTC.F0=~PORTC.F0;}
if(vflag==1){
PORTC.F1=vout[0];
PORTC.F1=~PORTC.F1;}
if(vflag==2){
PORTC.F2=vin[1];
PORTC.F2=~PORTC.F2;}
if(vflag==3){
PORTC.F3=vout[1];
123
PORTC.F3=~PORTC.F3;}
if(vflag==4){
PORTC.F4=vin[2];
PORTC.F4=~PORTC.F4;}
if(vflag==5){
PORTC.F5=vout[2];
PORTC.F5=~PORTC.F5;}
if(vflag==6){
PORTC.F6=vbp;
PORTC.F6=~PORTC.F6;}
if(vflag==7){
PORTC.F7=comp;
PORTC.F7=~PORTC.F7;}
if(vflag==8){
vflag=0;
flag.F0=1;}
}
//Função para escanear os botões e verificar se estes foram pressionados
//A função retorna somente uma borda de subida nas variáveis uf, rf, df, lf ou ef
//As variáveis uk, rk, dk, lk e ek monitoram o estado dos botões
void scan_keys()
{
uf=0;
rf=0;
df=0;
lf=0;
ef=0;
if(PORTD.F0==0){
uk=0;}
if(PORTD.F1==0){
rk=0;}
if(PORTD.F2==0){
dk=0;}
if(PORTD.F3==0){
lk=0;}
if(PORTD.F4==0){
ek=0;}
if(PORTD.F0==1 && uk==0)
{
uk=1;
uf=1;
}
if(PORTD.F1==1 && rk==0)
{
rk=1;
rf=1;
}
if(PORTD.F2==1 && dk==0)
124
{
dk=1;
df=1;
}
if(PORTD.F3==1 && lk==0)
{
lk=1;
lf=1;
}
if(PORTD.F4==1 && ek==0)
{
ek=1;
ef=1;
}
}
//Função para medir a pressão usando o sensor no conversor A/D da PORTA.F0
//MPX5010DP retorna 450mV/kPa
//1kPa=7.5mmHg
unsigned int measure_pressure()
{
unsigned int pr;
pr = Adc_Read(0) & 0X3FF;//Função de leitura do conversor A/D utilizada da biblioteca nativa do MikroC
pr=(pr/12)-3;//mmHg
return(pr);
}
//Função para resetar as variáveis de timer
void reset_timers()
{
INTCON.F2=0;
PIR1.TMR1IF=0;
atimer1=0;
atimer2=0;
atimer3=0;
}
//Função para resetar as variáveis do timer0
void reset_timer0()
{
INTCON.F2=0;
atimer1=0;
atimer2=0;
}
//Função para temporizar x segundos a partir do timer0 do PIC
//INTCON.F2 é o flag do PIC que retorna a temporização do timer0
//INTCON.F2 deve ser retornado 31 vezes para retornar aproximadamente 1s
//como timer0 foi configurado para //32.768ms
//0.032768s*31=1.015808s que é muito próximo de 1s
void timerxs(unsigned short x)
{
if(INTCON.F2)
{
atimer1++;
INTCON.F2=0;
125
}
if(atimer1==31)
{
atimer2++;
atimer1=0;
}
if(atimer2==x)
{
atimer2=0;
tflag=1;
}
}
//Função para o gerenciamento de um menu de escolha de padrões e tempos de acionamento que utiliza o LCD e a
interface de botões
//Sempre que o menu está ativo, todas as válvulas são fechadas e o compressor é desligado
//Nenhum padrão opera neste momento
//A variável me1 controla a que opção do menu está ativa no momento
//É controlada pelos botões para cima e para baixo da interface
//A variável me2 controla a seleção de padrões/tempos
//É controlada pelos botões para esquerda e para direita
//Para confirmar uma opção, deve-se pressionar o botão enter
//Esta função acabou não sendo usada
void menu()
{
close_all_valves();
comp=0;
exec();
flag.F0=0;
flag.F3=0;
a=0;
if(me1>1 && uf==1)
{
me1--;
me2=1;
}
if(me1<5 && df==1)
{
me1++;
me2=1;
}
if(me1==1)
{
Lcd_Out(1,1,"PAD");
if(me2<2 && rf==1)
{
me2++;
}
if(me2>1 && lf==1)
{
me2--;
}
if(me2==1)
{
Lcd_Out(2,1,"pd1");
}
if(me2==2)
{
Lcd_Out(2,1,"pd2");
}
126
if(ef==1)
{
padrao=me2;
Lcd_Out(1,1,"OK ");
Delay_ms(1000);
}
}
if(me1==2)
{
Lcd_Out(1,1,"TMP");
if(me2<2 && rf==1)
{
me2++;
}
if(me2>1 && lf==1)
{
me2--;
}
if(me2==1)
{
Lcd_Out(2,1,"tp1");
}
if(me2==2)
{
Lcd_Out(2,1,"tp2");
}
if(ef==1)
{
tempo=me2;
Lcd_Out(1,1,"OK ");
Delay_ms(1000);
}
}
if(me1==3)
{
Lcd_Out(1,1,"tst");
Lcd_Out(2,1," ");
if(ef==1)
{
//print("aguarde",2);
//test();
//print("teste concluido",2);
Delay_ms(1000);
}
}
if(me1==4)
{
Lcd_Out(1,1,"fim");
Lcd_Out(2,1,"ok?");
a=0;
reset_timers();
if(ef==1)
{
mflag=0;
me1=1;
flag.F0=0;
pflag=15;
tflag=0;
}
127
}
if(me1==5)
{
Lcd_Out(1,1,"off");
Lcd_Out(2,1,"ok?");
reset_timers();
if(ef==1)
{
mflag=0;
me1=1;
}
}
}
//Função para setar as portas do microcontrolador como entradas/saídas
void set_ports()
{
ADCON1 = 0X00;
TRISA=0B00000001;//F0 medição de pressão
TRISB=0B00000000;//F0-F4 LCD dados, F5-F6 LCD comandos
TRISC=0B00000000;//F0-F6 válvulas, F7 compressor
TRISD=0B00011111;//F0-F4 botões
}
//Função para setar os timers
void set_timer()
{
OPTION_REG = 0B00000111;//timer0 setado em 32.768ms
TMR0 = 0X00;//preseta timer0 em 0
//timer1 setado em xms
T1CON.T1CKPS1 = 1;
T1CON.T1CKPS0 = 1;
T1CON.T1SYNC = 1;
T1CON.TMR1CS = 0;
T1CON.TMR1ON = 1;
TMR1H = 0;// preseta bit mais significativo do timer1 em 0
TMR1L = 0;// preseta bit menos significativo do timer1 em 0
}
//Função para calibrar um determinado grupo de bolsões
//Devem ser entrados como parâmetros
//i - número que identifica um certo conjunto de bolsões
//prss - pressão estabilizada dentro do conjunto de bolsões
//prmax - pressão máxima que deve-se atingir para poder calibrar
void calibrate(unsigned short i, unsigned short prss, unsigned short prmax)
{
//Abre válvula de saída do conjunto i de bolsões
//Equaliza a pressão na linha para posterior medição
if(pflag==0)
{
vout[i]=1;
exec();
}
//Verifica se foi executado
if(pflag==0 && flag.F0==1)
{
128
flag.F0=0;
pflag=1;
}
//Fecha válvula de saída do conjunto i de bolsões
if(pflag==1)
{
vout[i]=0;
exec();
}
//Verifica se foi executado
if(pflag==1 && flag.F0==1)
{
flag.F0=0;
pflag=2;
}
//Mede a pressão na linha
//Se pressão dentro do limite estabelecido, finaliza função, pois o conjunto já está calibrado
if(pflag==2 && measure_pressure()<=(prss+4) && measure_pressure()>=(prss-4))
{
pflag=0;
flag.F2=1;
}
//Se pressão menor que a estabelecida, iniciar procedimento de enchimento
if(pflag==2 && measure_pressure()<(prss-4))
{
pflag=3;
}
//Se pressão maior que a esabelecida, iniciar procedimento de escape
if(pflag==2 && measure_pressure()>(prss+4))
{
pflag=7;
}
//Procedimento de enchimento do conjunto i de bolsões
//Abre somente as válvulas de entrada e saída do conjunto i
if(pflag==3)
{
vin[0]=0;
vout[0]=0;
vin[1]=0;
vout[1]=0;
vin[2]=0;
vout[2]=0;
vin[i]=1;
vout[i]=1;
vbp=0;
comp=0;
exec();
}
//Verifica se foi executado e se a pressão é menor que a pressão máxima (por segurança)
if(pflag==3 && flag.F0==1 && measure_pressure()<prmax)
{
pflag=4;
flag.F0=0;
}
129
//Espera 2s e liga o compressor com as válvulas de entrada e saída do conjunto i abertas, para inflar os bolsões
if(pflag==4)
{
timerxs(2);
if(tflag==1)
{
comp=1;
exec();
}
}
//Verifica se foi executado e se a pressão é maior que a pressão máxima
if(pflag==4 && flag.F0==1 && measure_pressure()>=prmax)
{
pflag=5;
reset_timer0();
flag.F0=0;
tflag=0;
}
//Desliga o compressor
if(pflag==5)
{
comp=0;
exec();
}
//Verifica se foi executado
if(pflag==5 && flag.F0==1)
{
pflag=6;
flag.F0=0;
}
//Espera 4s
if(pflag==6)
{
timerxs(4);
}
//Verifica se esperou
if(pflag==6 && tflag==1)
{
pflag=7;
reset_timer0();
tflag=0;
}
//Procedimento de escape
//Fecha válvula de entrada e mantém a válvula de saída aberta, abrindo também a válvula de bypass
if(pflag==7)
{
vin[i]=0;
vout[i]=1;
vbp=1;
exec();
}
//Verifica se foi executado e se a pressão está dentro do padrão estabelecido
if(pflag==7 && flag.F0==1 && measure_pressure()<=(prss+4) && measure_pressure()>=(prss-4))
{
pflag=8;
130
flag.F0=0;
}
//Fecha a válvula de bypass
if(pflag==8)
{
vbp=0;
exec();
}
//Se foi executado e a pressão está dentro do padrão estabelecido, inicia confirmação de estabilização da pressão
if(pflag==8 && flag.F0==1 && measure_pressure()<=(prss+4) && measure_pressure()>=(prss-4))
{
pflag=9;
flag.F0=0;
}
//Se foi executado e a pressão é maior do que o estabelecido, reinicia o procedimento de escape
if(pflag==8 && flag.F0==1 && measure_pressure()>(prss+4))
{
pflag=7;
flag.F0=0;
}
//Confirmação de estabilização da pressão
//Espera 6s e fecha a válvula de saída do conjunto i
if(pflag==9)
{
timerxs(6);
if(tflag==1)
{
Lcd_Out(2,1,"OK");
vout[i]=0;
exec();
}
}
//Verifica se foi executado e a pressão está dentro do padrão estabelecido
if(pflag==9 && flag.F0==1 && measure_pressure()<=(prss+4) && measure_pressure()>=(prss-4))
{
flag.F0=0;
tflag=0;
reset_timer0();
pflag=10;
}
//Abre a válvula de bypass
//Para limpar a linha de pressão
if(pflag==10)
{
vbp=1;
exec();
}
//Verifica se foi executado
if(pflag==10 && flag.F0==1)
{
flag.F0=0;
pflag=11;
reset_timer0();
}
131
//Fecha a válvula de bypass
if(pflag==11)
{
timerxs(3);
if(tflag==1)
{
vbp=0;
exec();
}
}
//Se foi executado com sucesso, finaliza a função
if(pflag==11 && flag.F0==1)
{
flag.F0=0;
tflag=0;
reset_timer0();
flag.F2=1;
pflag=0;
}
//Se a confirmação de estabilização da pressão foi executada e a pressão é maior do que o estabelecido
//Reinicia o procedimento de escape
if(pflag==9 && flag.F0==1 && measure_pressure()>(prss+4))
{
pflag=7;
flag.F0=0;
reset_timer0();
}
//Se durante a confirmação de estabilização da pressão foi a pressão é maior do que o estabelecido (para evitar
variações bruscas)
//Reinicia o procedimento de escape
if(pflag==9 && tflag==0 && measure_pressure()>(prss+4))
{
pflag=7;
flag.F0=0;
reset_timer0();
}
}
//Função para inicializar os bolsões
void start_up()
{
//Abre todas as válvulas
if(a==0)
{
open_all_valves();
exec();
}
//Verifica se foi executado
if(a==0 && flag.F0==1)
{
a=1;
flag.F0=0;
}
//Fecha todas as válvulas
if(a==1)
{
132
close_all_valves();
exec();
}
//Verifica se foi executado
if(a==1 && flag.F0==1)
{
a=2;
flag.F0=0;
}
//Calibra o conjunto 0 com 25mmHg, inflando no máximo até 45mmHg
if(a==2)
{
calibrate(0,25,45);
//Verifica se calibrou
if(flag.F2==1)
{
flag.F2=0;
a=3;
}
}
//Espera 3s
if(a==3)
{
timerxs(3);
//Verifica se esperou
if(tflag==1)
{
tflag=0;
a=4;
}
}
//Calibra o conjunto 1 com 25mmHg, inflando no máximo até 45mmHg
if(a==4)
{
calibrate(1,25,45);
//Verifica se calibrou
if(flag.F2==1)
{
flag.F2=0;
a=5;
}
}
//Espera 3s
if(a==5)
{
timerxs(3);
//Verifica se esperou
if(tflag==1)
{
tflag=0;
a=6;
}
}
//Calibra o conjunto 2 com 25mmHg, inflando no máximo até 45mmHg
if(a==6)
{
133
calibrate(2,25,45);
//Verifica se calibrou
if(flag.F2==1)
{
flag.F2=0;
a=7;
}
}
//Espera 3s
if(a==7)
{
timerxs(3);
//Verifica se esperou
if(tflag==1)
{
tflag=0;
a=8;
}
}
}
//Função para executar um padrão de repetição
//flag.F2 é o flag que confirma a calibração
void pattern()
{
//Calibra conjunto 2 (cabeça), a 25mmHg, inflando no máximo até 45mmHg
if(a==8)
{
calibrate(2,25,45);
//Verifica se calibrou
if(flag.F2==1)
{
flag.F2=0;
a=9;
}
}
//Espera 55s
if(a==9)
{
timerxs(55);
//Verifica se esperou
if(tflag==1)
{
tflag=0;
a=10;
}
}
//Calibra conjunto 0 (posterior 1), a 25mmHg, inflando no máximo até 45mmHg
if(a==10)
{
calibrate(0,25,45);
//Verifica se calibrou
if(flag.F2==1)
{
flag.F2=0;
a=11;
}
}
134
//Espera 55s
if(a==11)
{
timerxs(55);
//Verifica se esperou
if(tflag==1)
{
tflag=0;
a=12;
}
}
//Calibra conjunto 1 (posterior 2), a 35mmHg, inflando no máximo até 45mmHg
if(a==12)
{
calibrate(1,35,45);
//Verifica se calibrou
if(flag.F2==1)
{
flag.F2=0;
a=13;
}
}
//Espera 55s
if(a==13)
{
timerxs(55);
//Verifica se esperou
if(tflag==1)
{
tflag=0;
a=14;
}
}
//Calibra conjunto 1, a 25mmHg, inflando no máximo até 45mmHg
if(a==14)
{
calibrate(1,25,45);
//Verifica se calibrou
if(flag.F2==1)
{
flag.F2=0;
a=15;
}
}
//Espera 55s
if(a==15)
{
timerxs(55);
//Verifica se esperou
if(tflag==1)
{
tflag=0;
a=16;
}
}
//Calibra conjunto 0, a 35mmHg, inflando no máximo até 45mmHg
135
if(a==16)
{
calibrate(0,35,45);
//Verifica se calibrou
if(flag.F2==1)
{
flag.F2=0;
a=17;
}
}
//Espera 55s
if(a==17)
{
timerxs(55);
//Verifica se esperou
if(tflag==1)
{
tflag=0;
a=10;//Reinicia a partir do conjunto 0 com 25mmHg
}
}
}
//Função para mostrar qual padrão e tempo de acionamento está sendo usado no momento
//Esta função acabou não sendo usada
void show_state()
{
unsigned int t;
Lcd_Out(2,1,"tp");
if(tempo==1)
{
Lcd_Out_CP("1");
t=5;
}
if(tempo==2)
{
Lcd_Out_CP("2");
t=10;
}
Lcd_Out(1,1,"pd");
if(padrao==1)
{
Lcd_Out_CP("1");
pattern(t);
}
if(padrao==2)
{
Lcd_Out_CP("2");
//pad2();
}
}
//Função para controle da interface LCD + botões
//Normalmente deverão ser exibidos na tela os padrões e tempos
//Caso o botão enter for pressionado, o menu é exibido
//Esta função acabou não sendo usada
void interface()
{
scan_keys();
136
if(ef==1)
mflag=1;
if(mflag==1)
{
menu();
}
else
{
show_state();
}
}
void main(){
unsigned int sensor=0;
char texto[7];
set_ports();
set_timer();
Lcd_Init();
Lcd_Cmd(_LCD_CLEAR);
Lcd_Cmd(_LCD_CURSOR_OFF);
PORTC=0XFF;
//Laço principal do programa
while(1)
{
Lcd_Out(1,1,"valor: ");
sensor=measure_pressure();
IntToStr(sensor, texto);
Lcd_Out_CP(texto);
ByteToStr(tflag, texto);
Lcd_Out(2,12,texto);
ByteToStr(flag.F0, texto);
Lcd_Out(2,10,texto);
ByteToStr(pflag, texto);
Lcd_Out(2,8,texto);
ByteToStr(a, texto);
Lcd_Out(2,5,texto);
start_up();
pattern();
}
}
137
APÊNDICE D
Diagrama esquemático final do protótipo
Order this document
by MPX5010/D
SEMICONDUCTOR TECHNICAL DATA
" " !!# !
"
"# !"
INTEGRATED
PRESSURE SENSOR
0 to 10 kPa (0 to 1.45 psi)
0.2 to 4.7 V OUTPUT
"
The MPX5010 series piezoresistive transducer is a state–of–the–art monolithic silicon
pressure sensor designed for a wide range of applications, but particularly those
employing a microcontroller or microprocessor with A/D inputs. This patented, single
element transducer combines advanced micromachining techniques, thin–film metallization, and bipolar processing to provide an accurate, high level analog output signal that
is proportional to the applied pressure.
Features
• 5.0% Maximum Error over 0° to 85°C
• Ideally Suited for Microprocessor or Microcontroller–Based Systems
BASIC CHIP
CARRIER ELEMENT
CASE 867–08, STYLE 1
• Patented Silicon Shear Stress Strain Gauge
• Durable Epoxy Unibody Element
• Temperature Compensated over
*40° to +125°C
VS
3
THIN FILM
TEMPERATURE
COMPENSATION
AND
GAIN STAGE #1
X–ducer
SENSING
ELEMENT
2
GAIN STAGE #2
AND
GROUND
REFERENCE
SHIFT CIRCUITRY
1
Vout
DIFFERENTIAL
PORT OPTION
CASE 867C–05, STYLE 1
PINS 4, 5 AND 6 ARE NO CONNECTS
PIN NUMBER
GND
Figure 1. Fully Integrated Pressure Sensor Schematic
MAXIMUM RATINGS(1)
Parametrics
Symbol
Value
Unit
Overpressure(2) (P1 > P2)
Pmax
75
kPa
Burst Pressure(2) (P1 > P2)
Pburst
100
kPa
Tstg
– 40 to +125
°C
TA
– 40 to +125
°C
Storage Temperature
Operating Temperature
1
Vout
4
N/C
2
Gnd
5
N/C
3
VS
6
N/C
NOTE: Pins 4, 5, and 6 are internal
device connections. Do not connect
to external circuitry or ground. Pin 1
is noted by the notch in the Lead.
1. TC = 25°C unless otherwise noted.
2. Exposure beyond the specified limits may cause permanent damage or degradation to the device.
Senseon and X–ducer are trademarks of Motorola, Inc.
REV 2
Motorola Sensor Device Data
Motorola, Inc. 1997
1
OPERATING CHARACTERISTICS (VS = 5.0 Vdc, TA = 25°C unless otherwise noted, P1 > P2)
Characteristic
Symbol
Min
Pressure Range(1)
POP
0
Supply Voltage(2)
VS
4.75
Supply Current
Io
—
Typ
Max
Unit
—
10
kPa
5.0
5.25
Vdc
7.0
10
mAdc
Minimum Pressure Offset(3)
@ VS = 5.0 Volts
(0 to 85°C)
Voff
0
0.2
0.425
Vdc
Full Scale Output(4)
@ VS = 5.0 Volts
(0 to 85°C)
VFSO
4.475
4.7
4.925
Vdc
Full Scale Span(5)
@ VS = 5.0 Volts
(0 to 85°C)
VFSS
—
4.5
—
Vdc
Accuracy(6)
(0 to 85°C)
Sensitivity
Response Time(7)
Output Source Current at Full Scale Output
—
—
—
± 5.0
%VFSS
V/P
—
450
—
mV/kPa
tR
—
1.0
—
ms
IO+
—
0.1
—
mAdc
Warm–Up Time(8)
—
—
20
—
ms
Offset Stability(9)
—
—
± 0.5
—
%VFSS
Symbol
Min
Typ
Max
Unit
Weight, Basic Element (Case 867)
—
—
4.0
—
Grams
Common Mode Line Pressure(10)
—
—
—
690
kPa
MECHANICAL CHARACTERISTICS
Characteristic
NOTES:
1. 1.0 kPa (kiloPascal) equals 0.145 psi.
2. Device is ratiometric within this specified excitation range.
3. Offset (Voff) is defined as the output voltage at the minimum rated pressure.
4. Full Scale Output (VFSO) is defined as the output voltage at the maximum or full rated pressure.
5. Full Scale Span (VFSS) is defined as the algebraic difference between the output voltage at full rated pressure and the output voltage at the
minimum rated pressure.
6. Accuracy (error budget) consists of the following:
• Linearity:
Output deviation from a straight line relationship with pressure over the specified pressure range.
• Temperature Hysteresis: Output deviation at any temperature within the operating temperature range, after the temperature is
cycled to and from the minimum or maximum operating temperature points, with zero differential pressure
applied.
• Pressure Hysteresis:
Output deviation at any pressure within the specified range, when this pressure is cycled to and from the
minimum or maximum rated pressure, at 25°C.
• TcSpan:
Output deviation over the temperature range of 0° to 85°C, relative to 25°C.
• TcOffset:
Output deviation with minimum rated pressure applied, over the temperature range of 0° to 85°C, relative
to 25°C.
• Variation from Nominal: The variation from nominal values, for Offset or Full Scale Span, as a percent of VFSS, at 25°C.
7. Response Time is defined as the time for the incremental change in the output to go from 10% to 90% of its final value when subjected to
a specified step change in pressure.
8. Warm–up is defined as the time required for the product to meet the specified output voltage after the Pressure has been stabilized.
9. Offset stability is the product’s output deviation when subjected to 1000 hours of Pulsed Pressure, Temperature Cycling with Bias Test.
10. Common mode pressures beyond what is specified may result in leakage at the case–to–lead interface.
2
Motorola Sensor Device Data
ON–CHIP TEMPERATURE COMPENSATION, CALIBRATION AND SIGNAL CONDITIONING
Figure 2 illustrates the Differential/Gauge Sensing Chip in
the basic chip carrier (Case 867). A fluorosilicone gel isolates
the die surface and wire bonds from the environment, while
allowing the pressure signal to be transmitted to the sensor
diaphragm.
The MPX5010 series pressure sensor operating characteristics, and internal reliability and qualification tests are based
on use of dry air as the pressure media. Media, other than dry
air, may have adverse effects on sensor performance and
long–term reliability. Contact the factory for information
SILICONE
DIE COAT
WIRE BOND
regarding media compatibility in your application.
Figure 3 shows a typical decoupling circuit for interfacing
the integrated sensor to the A/D input of a microprocessor.
Proper decoupling of the power supply is recommended.
Figure 4 shows the sensor output signal relative to pressure input. Typical, minimum, and maximum output curves
are shown for operation over a temperature range of 0° to
85°C using the decoupling circuit below. (The output will saturate outside of the specified pressure range.)
STAINLESS STEEL
METAL COVER
DIE
MPX5010
OUTPUT
(PIN 1)
ÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉ
P1
A/D
50 pF
51 k
µ PROCESSOR
RTV DIE
BOND
LEAD FRAME
P2
EPOXY CASE
Figure 3. Typical Decoupling Filter for Sensor to
Microprocessor Interface
Figure 2. Cross–Sectional Diagram
(Not to Scale)
OUTPUT (V)
5.0
TRANSFER FUNCTION:
4.5 V = V *(0.09*P+0.04) ± ERROR
out S
4.0 VS = 5.0 Vdc
TEMP = 0 to 85°C
3.5
3.0
2.5
2.0
1.5
TYPICAL
MAX
1.0
MIN
0.5
0
0
1
2
4
5
6
8
3
7
DIFFERENTIAL PRESSURE (kPa)
9
10
11
Figure 4. Output versus Pressure Differential
Motorola Sensor Device Data
3
Transfer Function (MPX5010D)
Nominal Transfer Value: Vout = VS x (0.09 x P + 0.04)
Nominal Transfer Value: ± (Pressure Error x Temp. Factor x 0.09 x VS)
Nominal Transfer Value: VS = 5.0 V ± 0.25 Vdc
Temperature Error Band
MPX5010D Series
4.0
3.0
Temperature
Error
Factor
2.0
Temp
Multiplier
– 40
0 to 85
+125
3
1
3
1.0
0.0
–40
–20
0
20
40
80
60
100
120
140
Temperature in C°
NOTE: The Temperature Multiplier is a linear response from 0° to –40°C and from 85° to 125°C.
Pressure Error Band
0.5
0.4
Pressure Error (kPa)
0.3
0.2
0.1
0
–0.1
–0.2
0
1
2
3
4
5
6
7
8
9
10
Pressure (kPa)
–0.3
–0.4
–0.5
4
Pressure
Error (Max)
0 to 10 kPa
± 0.5 kPa
Motorola Sensor Device Data
PRESSURE (P1)/VACUUM (P2) SIDE IDENTIFICATION TABLE
Motorola designates the two sides of the pressure sensor
as the Pressure (P1) side and the Vacuum (P2) side. The
Pressure (P1) side is the side containing fluoro silicone gel
which protects the die from harsh media. The Motorola MPX
Part Number
pressure sensor is designed to operate with positive differential pressure applied, P1 > P2.
The Pressure (P1) side may be identified by using the table
below:
Pressure (P1)
Side Identifier
Case Type
MPX5010D
867–08C
Stainless Steel Cap
MPX5010DP
867C–05
Side with Part Marking
MPX5010GP
867B–04
Side with Port Attached
MPX5010GVP
867D–04
Stainless Steel Cap
MPX5010GS
867E–03
Side with Port Attached
MPX5010GVS
867A–04
Stainless Steel Cap
MPX5010GSX
867F–03
Side with Port Attached
MPX5010GVSX
867G–03
Stainless Steel Cap
ORDERING INFORMATION
The MPX5010 pressure sensor is available in differential and gauge configurations. Devices are available in the basic element package or with pressure port fittings that provide printed circuit board mounting ease and barbed hose pressure connections.
MPX Series
D i T
Device
Type
O i
Options
C
Case
Type
T
Order Number
Device Marking
Basic Element
Differential
867–08
MPX5010D
MPX5010D
Ported Elements
Differential Dual Ports
867C–05
MPX5010DP
MPX5010DP
Gauge
867B–04
MPX5010GP
MPX5010GP
Gauge Vacuum Port
867D–04
MPX5010GVP
MPX5010GVP
Gauge, Axial
867E–03
MPX5010GS
MPX5010D
Gauge Vacuum Axial
867A–04
MPX5010GVS
MPX5010D
Gauge, Axial PC Mount
867F–03
MPX5010GSX
MPX5010D
Gauge Vacuum Axial PC Mount
867G–03
MPX5010GVSX
MPX5010D
Motorola Sensor Device Data
5
PACKAGE DIMENSIONS
C
R
M
B
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
3. DIMENSION –A– IS INCLUSIVE OF THE MOLD
STOP RING. MOLD STOP RING NOT TO EXCEED
16.00 (0.630).
POSITIVE PRESSURE
(P1)
–A–
N
PIN 1
SEATING
PLANE
1
2
3
4
5
DIM
A
B
C
D
F
G
J
L
M
N
R
S
L
6
–T–
G
J
S
F
D 6 PL
0.136 (0.005)
M
T A
M
INCHES
MIN
MAX
0.595
0.630
0.514
0.534
0.200
0.220
0.027
0.033
0.048
0.064
0.100 BSC
0.014
0.016
0.695
0.725
30 _NOM
0.475
0.495
0.430
0.450
0.090
0.105
STYLE 1:
PIN 1.
2.
3.
4.
5.
6.
CASE 867–08
ISSUE N
MILLIMETERS
MIN
MAX
15.11
16.00
13.06
13.56
5.08
5.59
0.68
0.84
1.22
1.63
2.54 BSC
0.36
0.40
17.65
18.42
30 _NOM
12.07
12.57
10.92
11.43
2.29
2.66
VOUT
GROUND
VCC
V1
V2
VEX
BASIC ELEMENT (D)
A
C
–B–
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
POSITIVE
PRESSURE
(P1)
V
DIM
A
B
C
D
E
F
G
J
K
N
S
V
PIN 1
PORT #2
VACUUM
(P2)
1
K
J
N
E
–T–
2
3
4
5
6
S
G
F
D 6 PL
0.13 (0.005)
M
T B
M
INCHES
MIN
MAX
0.690
0.720
0.245
0.255
0.780
0.820
0.027
0.033
0.178
0.186
0.048
0.064
0.100 BSC
0.014
0.016
0.345
0.375
0.300
0.310
0.220
0.240
0.182
0.194
STYLE 1:
PIN 1.
2.
3.
4.
5.
6.
MILLIMETERS
MIN
MAX
17.53
18.28
6.22
6.48
19.81
20.82
0.69
0.84
4.52
4.72
1.22
1.63
2.54 BSC
0.36
0.41
8.76
9.53
7.62
7.87
5.59
6.10
4.62
4.93
VOUT
GROUND
VCC
V1
V2
VEX
CASE 867A–04
ISSUE E
VACUUM SIDE PORTED (GVS)
6
Motorola Sensor Device Data
PACKAGE DIMENSIONS–CONTINUED
–T–
A
U
L
SEATING
PLANE
R
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
PORT #1
POSITIVE
PRESSURE (P1)
V
–Q–
N
B
K
1
2
3
4
5
6
PIN 1
–P–
C
0.25 (0.010)
J
M
T Q
S
G
M
D 6 PL
0.13 (0.005)
F
M
INCHES
MIN
MAX
1.145
1.175
0.685
0.715
0.305
0.325
0.027
0.033
0.048
0.064
0.100 BSC
0.014
0.016
0.695
0.725
0.290
0.300
0.420
0.440
0.153
0.159
0.153
0.159
0.230
0.250
0.220
0.240
0.910 BSC
0.182
0.194
DIM
A
B
C
D
F
G
J
K
L
N
P
Q
R
S
U
V
T P
Q
S
S
STYLE 1:
PIN 1.
2.
3.
4.
5.
6.
CASE 867B–04
ISSUE E
MILLIMETERS
MIN
MAX
29.08
29.85
17.40
18.16
7.75
8.26
0.68
0.84
1.22
1.63
2.54 BSC
0.36
0.41
17.65
18.42
7.37
7.62
10.67
11.18
3.89
4.04
3.89
4.04
5.84
6.35
5.59
6.10
23.11 BSC
4.62
4.93
VOUT
GROUND
VCC
V1
V2
VEX
PRESSURE SIDE PORTED (GP)
P
0.25 (0.010)
M
T Q
M
U
W
X
R
PORT #1
POSITIVE
PRESSURE
(P1)
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
–A–
L
V
PORT #2 VACUUM (P2)
PORT #1 POSITIVE
PRESSURE (P1)
N
–Q–
PORT #2
VACUUM
(P2)
B
PIN 1
1
2
3
4
5
K
6
C
SEATING
PLANE
–T–
–T–
S
SEATING
PLANE
J
D 6 PL
G
F
0.13 (0.005)
M
A
M
CASE 867C–05
ISSUE F
DIM
A
B
C
D
F
G
J
K
L
N
P
Q
R
S
U
V
W
X
INCHES
MIN
MAX
1.145
1.175
0.685
0.715
0.405
0.435
0.027
0.033
0.048
0.064
0.100 BSC
0.014
0.016
0.695
0.725
0.290
0.300
0.420
0.440
0.153
0.159
0.153
0.159
0.063
0.083
0.220
0.240
0.910 BSC
0.182
0.194
0.310
0.330
0.248
0.278
STYLE 1:
PIN 1.
2.
3.
4.
5.
6.
MILLIMETERS
MIN
MAX
29.08
29.85
17.40
18.16
10.29
11.05
0.68
0.84
1.22
1.63
2.54 BSC
0.36
0.41
17.65
18.42
7.37
7.62
10.67
11.18
3.89
4.04
3.89
4.04
1.60
2.11
5.59
6.10
23.11 BSC
4.62
4.93
7.87
8.38
6.30
7.06
VOUT
GROUND
VCC
V1
V2
VEX
PRESSURE AND VACUUM SIDES PORTED (DP)
Motorola Sensor Device Data
7
PACKAGE DIMENSIONS–CONTINUED
0.25 (0.010)
–P–
T Q M
M
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
A
U
–T–
SEATING
PLANE
PORT #2
VACUUM (P2)
L
V
R
DIM
A
B
C
D
F
G
J
K
L
N
P
Q
R
S
U
V
POSITIVE PRESSURE (P1)
–Q–
N
B
PIN 1
1
2
3
4
5
K
6
S
C
G
D 6 PL
J
F
0.13 (0.005)
M
T P
S
Q
INCHES
MIN
MAX
1.145
1.175
0.685
0.715
0.305
0.325
0.027
0.033
0.048
0.064
0.100 BSC
0.014
0.016
0.695
0.725
0.290
0.300
0.420
0.440
0.153
0.159
0.153
0.159
0.230
0.250
0.220
0.240
0.910 BSC
0.182
0.194
STYLE 1:
PIN 1.
2.
3.
4.
5.
6.
S
CASE 867D–04
ISSUE F
MILLIMETERS
MIN
MAX
29.08
29.85
17.40
18.16
7.75
8.26
0.68
0.84
1.22
1.63
2.54 BSC
0.36
0.41
17.65
18.42
7.37
7.62
10.67
11.18
3.89
4.04
3.89
4.04
5.84
6.35
5.59
6.10
23.11 BSC
4.62
4.93
VOUT
GROUND
VCC
V1
V2
VEX
VACUUM SIDE PORTED (GVP)
C
–B–
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
A
DIM
A
B
C
D
E
F
G
J
K
N
S
V
V
PIN 1
PORT #1
POSITIVE
PRESSURE
(P1)
6
K
J
N
5
–T–
3
2
1
S
G
F
E
4
D
6 PL
0.13 (0.005)
M
T B
M
INCHES
MIN
MAX
0.690
0.720
0.245
0.255
0.780
0.820
0.027
0.033
0.178
0.186
0.048
0.064
0.100 BSC
0.014
0.016
0.345
0.375
0.300
0.310
0.220
0.240
0.182
0.194
STYLE 1:
PIN 1.
2.
3.
4.
5.
6.
MILLIMETERS
MIN
MAX
17.53
18.28
6.22
6.48
19.81
20.82
0.69
0.84
4.52
4.72
1.22
1.63
2.54 BSC
0.36
0.41
8.76
9.53
7.62
7.87
5.59
6.10
4.62
4.93
VOUT
GROUND
VCC
V1
V2
VEX
CASE 867E–03
ISSUE D
PRESSURE SIDE PORTED (AS, GS)
8
Motorola Sensor Device Data
PACKAGE DIMENSIONS–CONTINUED
–T–
C
A
U
E
–Q–
N
V
B
R
PIN 1
PORT #1
POSITIVE
PRESSURE
(P1)
–P–
0.25 (0.010)
T Q
M
6
M
5
4
3
2
1
S
K
J
0.13 (0.005)
M
T P
S
D 6 PL
Q S
G
NOTES:
1. DIMENSIONING AND TOLERANCING PER
ANSI Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
DIM
A
B
C
D
E
F
G
J
K
N
P
Q
R
S
U
V
INCHES
MIN
MAX
1.080
1.120
0.740
0.760
0.630
0.650
0.027
0.033
0.160
0.180
0.048
0.064
0.100 BSC
0.014
0.016
0.220
0.240
0.070
0.080
0.150
0.160
0.150
0.160
0.440
0.460
0.695
0.725
0.840
0.860
0.182
0.194
STYLE 1:
PIN 1.
2.
3.
4.
5.
6.
F
MILLIMETERS
MIN
MAX
27.43
28.45
18.80
19.30
16.00
16.51
0.68
0.84
4.06
4.57
1.22
1.63
2.54 BSC
0.36
0.41
5.59
6.10
1.78
2.03
3.81
4.06
3.81
4.06
11.18
11.68
17.65
18.42
21.34
21.84
4.62
4.93
VOUT
GROUND
VCC
V1
V2
VEX
CASE 867F–03
ISSUE D
PRESSURE SIDE PORTED (GSX)
–T–
C
A
U
E
–Q–
POSITIVE
PRESSURE
(P1)
N
V
B
R
PORT #2
VACUUM
(P2)
PIN 1
–P–
0.25 (0.010)
M
T Q
M
1
2
3
4
5
6
S
K
J
0.13 (0.005)
M
T P
S
D 6 PL
Q S
G
F
NOTES:
1. DIMENSIONING AND TOLERANCING PER
ANSI Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
DIM
A
B
C
D
E
F
G
J
K
N
P
Q
R
S
U
V
INCHES
MIN
MAX
1.080
1.120
0.740
0.760
0.630
0.650
0.027
0.033
0.160
0.180
0.048
0.064
0.100 BSC
0.014
0.016
0.220
0.240
0.070
0.080
0.150
0.160
0.150
0.160
0.440
0.460
0.695
0.725
0.840
0.860
0.182
0.194
STYLE 1:
PIN 1.
2.
3.
4.
5.
6.
MILLIMETERS
MIN
MAX
27.43
28.45
18.80
19.30
16.00
16.51
0.68
0.84
4.06
4.57
1.22
1.63
2.54 BSC
0.36
0.41
5.59
6.10
1.78
2.03
3.81
4.06
3.81
4.06
11.18
11.68
17.65
18.42
21.34
21.84
4.62
4.93
VOUT
GROUND
VCC
V1
V2
VEX
CASE 867G–03
ISSUE D
VACUUM SIDE PORTED (GVSX)
Motorola Sensor Device Data
9
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty, representation or guarantee regarding
the suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, and
specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters which may be provided in Motorola
data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals”
must be validated for each customer application by customer’s technical experts. Motorola does not convey any license under its patent rights nor the rights of
others. Motorola products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other
applications intended to support or sustain life, or for any other application in which the failure of the Motorola product could create a situation where personal injury
or death may occur. Should Buyer purchase or use Motorola products for any such unintended or unauthorized application, Buyer shall indemnify and hold Motorola
and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees
arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that
Motorola was negligent regarding the design or manufacture of the part. Motorola and
are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal
Opportunity/Affirmative Action Employer.
Mfax is a trademark of Motorola, Inc.
How to reach us:
USA / EUROPE / Locations Not Listed: Motorola Literature Distribution;
P.O. Box 5405, Denver, Colorado 80217. 303–675–2140 or 1–800–441–2447
JAPAN: Nippon Motorola Ltd.; Tatsumi–SPD–JLDC, 6F Seibu–Butsuryu–Center,
3–14–2 Tatsumi Koto–Ku, Tokyo 135, Japan. 81–3–3521–8315
Mfax: [email protected] – TOUCHTONE 602–244–6609
ASIA/PACIFIC: Motorola Semiconductors H.K. Ltd.; 8B Tai Ping Industrial Park,
– US & Canada ONLY 1–800–774–1848 51 Ting Kok Road, Tai Po, N.T., Hong Kong. 852–26629298
INTERNET: http://motorola.com/sps
10
◊
Motorola Sensor DeviceMPX5010/D
Data
Technical Data Sheet
6/12/2013
Model:AZA1335DDS (AZ1335DS)
Product Description
Type:
Reciprocating
Application:
LBP - Low Back Pressure
Refrigerant:
R12
Voltage/Frequency:
115-127V ~ 60Hz
Product Specifications
Performance
Input Power
Refrigeration Capacity
Efficiency
EVAP TEMP
Condition
Test Voltage
Btu/h
kcal/h
W
W
Btu/Wh
kcal/Wh
W/W
ASHRAE
127V ~ 60HZ
360
91
106
105
3.43
.86
1
General
Evaporating Temp. Range:
Motor Torque:
Compressor Cooling:
N/A
Low Start Torque (LST)
Static
Mechanical
Weight:
Weight Unit of Measure:
Displacement (cc):
Oil Type:
Viscosity (cSt):
Oil Charge (cc):
7.25
KG
3.59
Synthetic Alkylate
32
370
Electrical
Voltage Range (50 Hz):
Voltage Range (60 Hz):
Locked Rotor Amps (LRA):
Rated Load Amps (RLA 50 Hz):
Rated Load Amps (RLA 60 Hz):
Max. Continuous Current (MCC in Amps):
Motor Resistance (Ohm) - Main:
Motor Resistance (Ohm) - Start:
Motor Type:
Overload Type:
Relay Type:
Agency Approval
N/A
N/A
100-140
13.2
1.25
N/A
N/A
5.06
14.03
RSIR
N/A
Current Relay
COND
AMBIENT
RETURN
LIQUID
TEMP
TEMP
GAS
TEMP
Download