UNIVERSIDADE FEDERAL DE OURO PRETO – UFOP
ESCOLA DE MINAS – EM
DEPARTAMENTO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO E
TÉCNICAS FUNDAMENTAIS – DECAT
CONTROLE DE SISTEMA DE IRRIGAÇÃO COM
MONITORAMENTO VIA PROGRAMAÇÃO
MONOGRAFIA DE GRADUAÇÃO EM ENGENHARIA DE CONTROLE
E AUTOMAÇÃO
GABRIEL LADEIRA MEYER
Ouro Preto, 2005
AUTOR – GABRIEL LADEIRA MEYER
CONTROLE DE SISTEMA DE IRRIGAÇÃO COM
MONITORAMENTO VIA PROGRAMAÇÃO
Monografia apresentada ao Curso de
Engenharia de Controle e Automação
da Universidade Federal de Ouro
Preto como parte dos requisitos para a
obtenção de Grau em Engenheiro de
Controle e Automação.
Orientador: Prof. Dr. Luiz Fernando Rispoli Alves
Ouro Preto
Escola de Minas - UFOP
Julho / 2005
ii
iii
AGRADECIMENTOS
Agradeço a todos aqueles que me ajudaram no desenvolvimento deste
trabalho, de forma incondicional. Sem a ajuda destas pessoas certamente não seria possível
o sucesso de meu trabalho.
Agradeço em especial ao meu orientador professor Doutor Luiz Fernando
Rispoli, que me ajudou de forma integral.
iv
SUMÁRIO
1 INTRODUÇÃO .................................................................................................................. 1
1.1 O que é irrigação? ........................................................................................................ 1
1.2 O que é irrigação automatizada?.................................................................................. 1
1.3 Aspectos relevantes em um projeto de irrigação ......................................................... 2
1 .4 Determinando a necessidade de água ......................................................................... 3
1.5 Economia de água ........................................................................................................ 4
1.6 Fatores econômicos...................................................................................................... 5
1.7 Evolução tecnológica ................................................................................................... 6
2 REVISÃO TEORICA......................................................................................................... 7
2.1 Eletrônica e Automação............................................................................................... 7
2.1.1 Sensores ................................................................................................................ 8
2.1.2 Controladores...................................................................................................... 12
2.1.3 Atuadores ............................................................................................................ 13
2.1.4 Portas de Comunicação....................................................................................... 16
2.2 Vantagens da Irrigação Automatizada ....................................................................... 18
2.3 Avaliação do sistema de aspersão.............................................................................. 20
2.3.1 Recomendações para a realização do teste ......................................................... 21
2.3.2 Avaliação do sistema .......................................................................................... 22
2.3.2.1 Uniformidade de distribuição (UD) ............................................................. 22
2.3.2.2 Coeficiente de uniformidade (CU)............................................................... 22
2.3.2.3 Eficiência de irrigação (Ei) .......................................................................... 23
2.3.3 Procedimento no campo...................................................................................... 23
2.3.4 Coeficiente de variação de fabricação ................................................................ 24
2.3.5 Relação vazão versus pressão ............................................................................. 26
2.4 Enfoque sistêmico...................................................................................................... 28
2.4.1 História e revisão ................................................................................................ 28
2.4.2 O enfoque sistêmico adotado .............................................................................. 32
2.4.3 Propriedades do sistema...................................................................................... 33
v
2.4.3.1 Componentes propostos ............................................................................... 33
2.4.3.2 Estrutura....................................................................................................... 34
2.4.3.3 Funções ........................................................................................................ 34
2.4.3.4 Integração..................................................................................................... 35
2.4.3 Conclusão sobre o enfoque sistêmico adotado para esta investigação ............... 35
3 DESENVOLVIMENTO ................................................................................................... 35
3.1 Estudo de caso............................................................................................................ 36
3.1.1 Sistemas de Irrigação Automatizado para Agricultura de Pequeno Porte .......... 36
3.1.1.1 Concepção do sistema.................................................................................. 36
3.1.1.2 Avaliação do sistema ................................................................................... 40
3.1.1.2.1 Uniformidade de distribuição de água .................................................. 41
3.1.1.2.2 Vazão das agulhas................................................................................. 44
3.1.1.2.3 Relação vazão versus pressão ............................................................... 44
3.1.1.3 Automação do sistema ................................................................................. 46
3.1.1.3.1 Comunicação com a porta paralela do computador.............................. 46
3.1.1.3.2 Acionamento das válvulas .................................................................... 50
3.1.1.3.3 Acionamento dos motores..................................................................... 51
3.1.1.3.4 Movimentação dos carrinhos ................................................................ 54
3.1.1.3.5 Programa de controle da irrigação ........................................................ 55
3.1.1.4 Viabilização do sistema ............................................................................... 58
3.1.1.5 Recomendações............................................................................................ 58
3.1.1.6 Conclusão..................................................................................................... 59
3.1.2 Estudo da viabilidade econômica para a implantação do sistema de irrigação
automatizado predial.................................................................................................... 59
3.1.2.1 Método de irrigação atual ............................................................................ 60
3.1.2.2 Vantagens da automação.............................................................................. 61
3.1.2.2 Implantação do sistema................................................................................ 61
3.1.2.3 Conclusão..................................................................................................... 62
3.1.2.4 Recomendações............................................................................................ 63
4 Considerações Finais ........................................................................................................ 64
vi
LISTA DE FIGURAS
Figura 2.1 – Sensor de umidade do solo Watermark®. Fonte: Agrosystem. ........................ 9
Figura 2.2 – Sensor de umidade e transmissor ETEC. Fonte: ETEC .................................... 9
Figura 2.3 – Medidor magnético Profilux/Cerâmica. Fonte: Conaut. ................................. 10
Figura 2.4 – Medidor mássico MFM 4085 K. Fonte: Conaut. ............................................ 10
Figura 2.5 – Medidor ultrassônico UFM 610 P. Fonte: Conaut. ......................................... 11
Figura 2.6 – Rotâmetro modelo 250, com acoplamento magnético. ................................... 11
Figura 2.7 – Visor de fluxo modelo 095, com turbina......................................................... 11
Figura 2.8 – Controlador de irrigação Miracle .................................................................... 13
Figura 2.9 – Esquema de uma Válvula Solenóide ............................................................... 15
Figura 2.10 – Válvula de controle com solenóide. .............................................................. 15
Figura 2.11 – Válvula elétrica com controle solenóide. ...................................................... 15
Figura 2.12 – Motobombas .................................................................................................. 16
Figura 2.13 – Motobomba P 840 - Alta vazão..................................................................... 16
Figura 3.1 – Esquema em perspectiva do sistema de irrigação. .......................................... 38
Figura 3.2 – Vista da roldana no final do canteiro............................................................... 39
Figura 3.3 – Vista superior do sistema de irrigação............................................................. 40
Figura 3.4 – Esquema de coleta dos dados de precipitação dos pluviômetros para o setor 1.
...................................................................................................................................... 41
Figura 3.5 – Esquema de coleta dos dados de vazão ........................................................... 45
Figura 3.6 – Gráfico representativo da relação vazão versus pressão das agulhas.............. 46
Figura 3.7 – Vista da comunicação entre computador e meio externo via porta paralela ... 47
Figura 3.8 – Conector DB25 fêmea. Numeração dos pinos da porta paralela do PC.......... 48
Figura 3.9 – (a) Válvula para a injeção de água; (b) Válvula para a injeção de fertilizante 50
Figura 3.10 – Esquema elétrico para acionamento do relé via porta paralela. .................... 51
Figura 3.11 – Motor responsável pela movimentação do sistema. ...................................... 52
Figura 3.12 – Polarização direta. ......................................................................................... 53
vii
Figura 3.13 – Polarização invertida ..................................................................................... 53
Figura 3.14 – Interruptor magnético instalado na extremidade do canteiro ........................ 54
Figura 3.15 – Entrada de dados para manejo da irrigação................................................... 55
Figura 3.16 – Informações sobre as últimas irrigações........................................................ 56
Figura 3.17 – Fluxograma utilizado no desenvolvimento do programa. ............................. 57
viii
LISTA DE TABELAS
Tabela 1.1 – Perspectiva para o próximo século.................................................................... 4
Tabela 2.1 – Classificação da uniformidade de vazão segundo Solomon e ABNT. ........... 26
Tabela 2.2 – Classificação do regime de escoamento de acordo com o coeficiente ‘x’ da
equação potencial, representativa da relação vazão versus pressão. ........................... 27
Tabela 3.1 – Classificação da uniformidade de distribuição de água segundo normas da
ABNT........................................................................................................................... 42
Tabela 3.2 – Lâmina média aplicada em cada setor. ........................................................... 42
Tabela 3.3 – Soma total das vazões das agulhas em diversas pressões. .............................. 45
Tabela 3.4 – Função dos pinos do endereço 378 da porta paralela...................................... 49
Tabela 3.5 – Função dos pinos do endereço 37A da porta paralela..................................... 49
Tabela 3.6 – Função dos pinos do endereço 379 da porta paralela...................................... 50
ix
RESUMO
O presente trabalho visa um estudo dos sistemas de irrigação tanto
paisagismo quanto agroindustrial, como também alguns estudos de caso. O objetivo deste
estudo teórico é levantar as vantagens da automação dos sistemas de irrigação e a partir
deste trabalho uma análise dos benefícios que a automação trará a estes sistemas, como
redução de custos, redução de mão-de-obra, aumento da qualidade do produto e maior
produção, eliminação de aquisição de mangueiras e acessórios, valorização da propriedade
e sensível redução do consumo, devido ao uso eficiente e racional de água. Após este
estudo será proposto a realização de futuros trabalhos e desenvolvimento de produtos, que
possam atender às necessidades do mercado.
x
ABSTRACT
The present work aspires a study of irrigation systems of agroindustryal and
gardens, also some studies about practical events. The aim of this theoretical study is to
find out the advantages of providing automation systems on irrigations and, from this,
analyze the benefits that automation could bring to these systems, such as the degrading of
costs and hard working, increasing the quality of the product as much as the production,
elimination of the purchase of hoses and accessories, valuation of property and sensitive
reduction of consumption, because of the efficient and rational use of water. After that, will
be proposed a realization of future works and development of new products, which will be
able to attend the market needs.
xi
1 INTRODUÇÃO
1.1 O que é irrigação?
Segundo site da Internet paisagismobrasil.com.br, irrigação é uma técnica
utilizada na agricultura, em viveiros e no paisagismo, que tem por objetivo o fornecimento
de água para as plantas em quantidade suficiente e no momento certo, assegurando
produtividade, sobrevivência e exuberância.
Portanto, irrigar não é simplesmente jogar água sem nenhum critério, pois
desta forma pode-se aplicar doses excessivas que trazem problemas às raízes das plantas
(apodrecimento, lavagem de nutrientes) ou doses insuficientes que prejudicam o
desenvolvimento e a produtividade (redução do metabolismo).
Existe um conjunto de técnicas que, planejadas de forma adequada e
colocadas em operação no momento previsto, repõe a quantidade certa de água no solo,
garantindo à planta o suprimento necessário para um bom desenvolvimento.
1.2 O que é irrigação automatizada?
A irrigação automatizada é, basicamente, um sistema em que culturas,
jardins e gramados são irrigados em dias e horários pré-programados, com a duração de
tempo determinado para atender às necessidades específicas de cada área e do tipo de
vegetação.
Depois de implantado, cessa a preocupação com a rega, pois tal serviço é executado
automaticamente.
1
1.3 Aspectos relevantes em um projeto de irrigação
Quando da realização de um projeto de irrigação alguns pontos têm que ser
levados em consideração. São eles:
•
Tamanho e forma da área;
•
Horas de radiação direta de cada área;
•
Declividade do terreno;
•
Necessidades hídricas das plantas;
•
Profundidade efetiva do sistema radicular;
•
Ação de ventos predominantes;
•
Tipos de solo;
•
Sombreamento;
•
Dentre outras.
Feitos esses levantamentos, a próxima etapa é a escolha do equipamento
adequado:
•
As redes hidráulicas, secundária e principal;
•
Emissores de água (sprays, rotores, gotejadores, micro sprays, borbulhadores);
•
Rede elétrica;
•
Válvulas solenóides (registros);
•
Controladores.
2
1 .4 Determinando a necessidade de água
Segundo paisagismobrasil.com.br, a água é um elemento fundamental aos
processos de crescimento e desenvolvimento da planta, participando diretamente em dois
fatores vitais: Fotossíntese e absorção e translocação de nutrientes.
Segundo site da Internet paisagismobrasil.com.br, a fotossíntese é a síntese
de glicose a partir de energia luminosa nos cloroplastos. Essa reação, a partir de gás
carbônico e água, sintetizam os açúcares para a nutrição da planta. Os minerais são
absorvidos do solo pelas raízes juntamente com a água e conduzidos pelo xilema até as
folhas, onde se transformam em substâncias orgânicas que depois são redistribuídas na
planta pelo floema.
Após fornecer os nutrientes para a folha, a água deixa a planta através da
abertura de cavidades chamadas estômatos, sendo transpirada para a atmosfera. Nesse
momento, entra o gás carbônico utilizado na fotossíntese. Assim, estando a planta
absorvendo água, ocorre uma alta taxa de transpiração, suficiente provisão de minerais e
permanente entrada de gás carbônico.
Restrições de água no solo provocam o fechamento do estômato e a redução
da fotossíntese. O crescimento vegetal neste caso será reduzido e a produtividade
prejudicada.
Resumindo, a água é fundamental. Devemos ter um perfeito controle da
umidade do solo querendo-se observar resultados em um projeto de irrigação.
3
1.5 Economia de água
Outra grande vantagem de um sistema automatizado de irrigação é a
economia de água que ele pode gerar. Como todo o projeto sempre parte do princípio do
fornecimento à planta apenas da água consumida, procurando gerar a distribuição de água o
mais uniforme possível, não há desperdício. A irrigação manual depende da sensibilidade
de quem rega, e quase sempre isto significa que a água será mal distribuída.
A maioria dos controladores pode ser conectada a um dispositivo que indica
quando há chuva, ou quando o solo possui umidade suficiente, inibindo desta forma a
irrigação quando ela não é necessária. É possível, portanto, praticamente esquecer que o
sistema de irrigação existe. Ele poderá funcionar durante muito tempo sem assistência e
ainda economizar água sempre que possível.
Economia de água é um ponto de extrema importância do trabalho visto que,
segundo a World Resources Institute, ONU, 97,50% da água existente no planeta está nos
oceanos e mares, água essa imprópria para o consumo humano e agrícola, 2,493% está sob
a forma de gelo e só pode ser aproveitada através dos lençóis subterrâneos, o que
representa um difícil acesso a essa água e apenas 0,007% da água existente no planeta é
própria para o consumo humano e agricultura. Indo mais longe, dos 0,007% disponíveis ao
consumo, 70% são utilizados na agricultura, 22% na indústria e 8% consumo humano
direto.
E esse quadro, segundo estimativas da World Resources Institute, tende a
piorar:
Previsões
1999
2050
População Mundial
6.0 bilhões
9.4 bilhões
Suficiência
92%
58%
Insuficiência
5%
24%
Escassez
3%
18%
Tabela 1.1 – Perspectiva para o próximo século. Fonte: World Resources Institute.
4
Esse dado deixa claro a importância do uso controlado e racionalizado da
água na agricultura e esse uso ótimo pode ser atingido através da automação.
Também existe uma maneira de compensar a diferença que ocorre nos
valores de evapotranspiração ao longo do ano. Muitos controladores permitem que se faça
uma redução percentual de todos os setores irrigados, ao mesmo tempo. Na prática isto
significa que a lâmina de irrigação será reduzida na mesma proporção em todos os setores,
o que também resultará em economia de água.
1.6 Fatores econômicos
A modernização do setor agrícola gera uma migração da mão-de-obra rural
para o setor urbano-industrial. Esse fenômeno migratório gera uma escassez de mão-deobra no setor agrícola. Segundo dados do IBGE (1996) 31,5% da população
economicamente ativa do meio rural são trabalhadores sem instrução, com menos e um ano
de escolaridade.
A falta de mão-de-obra, aliada à baixa escolaridade dos trabalhadores rurais,
leva os produtores a procurarem formas alternativas de cultivo e produção, para que o
trabalho rural se torne mais produtivo e por conseqüência, mais lucrativo.
Uma alternativa é a modernização dos processos necessários ao
desenvolvimento das atividades rurais. Atualmente a irrigação conta com técnicas
modernas capazes de substituir o trabalho do homem. Existem hoje no mercado inúmeros
equipamentos de qualidade que automatizam, controlam e facilitam a irrigação. O grande
problema destes equipamentos é seu alto custo, o que pode tornar a automação inviável
para pequenas áreas e até mesmo, em alguns, casos de grandes áreas desestimularem os
produtores devido ao grande custo inicial.
O problema da escassez da água e sua iminente cobrança – atualmente no
Brasil se paga somente o tratamento e a distribuição da água, embora o artigo primeiro da
5
Lei das Águas declare que “a água é um bem de domínio público; é um recurso natural
limitado, dotado de valor econômico” – e a elevação dos custos de energia e mão-de-obra
têm colaborado para a automatização dos sistemas de irrigação.
1.7 Evolução tecnológica
A agricultura irrigada, assim como outras atividades do meio rural,
necessitam acompanhar o desenvolvimento tecnológico. Nas últimas décadas os
computadores e equipamentos eletrônicos, têm passado por um avanço tecnológico
vertiginoso, o que os tornaram mais baratos, precisos e com uma interface mais amigável.
Na
industria
eletrônica
existem
vários
componentes,
sensores,
microcontroladores que podem ser muito úteis à irrigação. Para esses componentes serem
aplicados bastam apenas algumas boas idéias de técnicos e engenheiros da área.
O controle da irrigação pode ser feito também através do computador
pessoal (PC), ele pode comandar válvulas solenóides, acionar motobombas além de
armazenar dados. A comunicação do PC com esses equipamentos é feita através das portas
externas, portas paralela, serial ou USB.
As grandes vantagens dos sistemas automáticos sobre o operador humano
são em geral: custo, rapidez, precisão, assiduidade e sua desvantagem é a incapacidade de
reagir a perturbações e acidentes além daqueles previstos no projeto.
O objetivo deste trabalho é fazer um estudo da automação da irrigação e
propor o desenvolvimento de uma tecnologia de baixo custo para a irrigação automatizada.
Como objetivo secundário, analisar potencialidades para trabalhos futuros e
possíveis desenvolvimentos de produtos que atendam ao objetivo principal.
6
2 REVISÃO TEÓRICA
2.1 Eletrônica e Automação
Para que se tenha uma otimização do sistema de irrigação, é necessária uma
tecnologia avançada que reduza o requerimento de mão-de-obra por unidade de área.
Porém essa redução da mão-de-obra deve ocorrer de forma natural e em compasso com o
crescimento do setor urbano-industrial, para que esse possa absorver a mão-de-obra
excedente do setor agrícola.
Grande parte das inovações tecnológicas tem como princípio básico
dispositivos eletrônicos. Ao longo dos últimos anos, a eletrônica vem passando por uma
evolução extremamente rápida ocupando uma posição e destaque dentre todas as outras
tecnologias (Braga, 1999).
Sem a eletrônica básica, é impossível saber como funcionam os dispositivos
de alta tecnologia de hoje (Braga, 1999).
A eletrônica, assim como em inúmeras áreas, tem um papel fundamental na
modernização da agricultura.
Os sistemas de automação para irrigações têm sido, neste século, uma
tecnologia de profunda repercussão, cuja importância provém não só de substituir o
trabalho humano nas tarefas monótonas e/ou cansativas, mas também, e principalmente, do
fato de permitir sensível melhoria na qualidade dos processos, com pequena elevação no
custo do equipamento (Castrucci, 1969).
7
2.1.1 Sensores
É possível chegar a uma automatização ótima, uma irrigação completamente
controlada. Porém, para isso seria necessária a implementação de sensores no projeto do
sistema. Por exemplo, pode-se adicionar a um sistema de irrigação automatizado um sensor
de chuva. Esse, por sua vez, envia um sinal ao controlador para que ele não acione a
irrigação nessas circunstâncias. Melhorando ainda mais esse sistema, um sensor de
umidade pode ser instalado. E esse sensor trabalhará com a umidade do solo, evitando que
a planta receba água além do que lhe é necessário.
Existem hoje no mercado diversos sensores desse tipo e de diversos preços.
Porém a escolha dos sensores depende de uma série de fatores. Cada projeto tem as suas
especificações, necessidades e limitações. Podemos citar alguns: O sensor de umidade do
solo Watermark®, fabricado pela Davis utiliza a resistência elétrica para medir o nível de
umidade do solo; Sensor de Umidade da Série HIH-3610, fabricado pela Honeywell, possui
alta precisão e robustez; JUNQUER® Sensor de Umidade, é ideal para resfriamento de lajes
e coberturas, controle de nível em reservatórios, gramados, jardins, floreiras, hortas,
estufas, vasos e paisagismo; Sensor de Umidade fabricado pela Dexter, sensor totalmente
digital, sem ajustes ou calibrações, permite conectar até quatro sensores no mesmo cabo,
comunicação
digital
evitando
erros
de
medida,
baixo
custo;
Transmissor
umidade/temperatura para controle em CLP’s, fabricado pela ETEC.
8
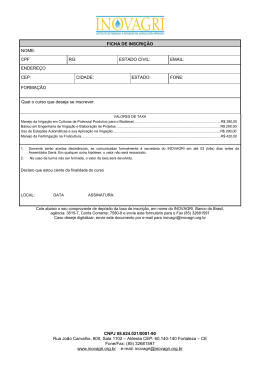
Figura 2.1 – Sensor de umidade do solo Watermark®. Fonte: Agrosystem.
Tomando como base o sensor fabricado pela ETEC, que é um sensor de
umidade capacitivo podemos explicar o seu funcionamento. O sensor de umidade é um
condensador cujo dielétrico é um polímero higroscópico. Como a constante dielétrica da
água é, aproximadamente, 80, uma forte variação da capacidade é obtida com a variação do
conteúdo de umidade desse polímero. E as vantagens particulares desse tipo de sensor são
uma boa linearidade, insensibilidade às variações de temperatura, respostas breves e vida
longa. O sensor possui uma ausência temporária de precisão se a condensação se forma na
sua superfície (o valor transmitido é maior do que o valor real, devido a um aumento da sua
capacidade real).
Figura 2.2 – Sensor de umidade e transmissor ETEC. Fonte: ETEC
Os medidores de vazão também são sensores que servem para medir e
transmitir a um controlador sua medição. Com um medidor de vazão o usuário poderá
saber a quantidade de água que o sistema utilizou para uma determinada irrigação, e as
calibrações poderão ser feitas com mais facilidade, além de se ter um controle do consumo
d’água. Os medidores de vazão podem ser: medidores magnéticos, medidores mássicos,
medidores ultrassônicos, rotâmetros, chaves de indução de fluxo e visores de fluxo. Alguns
exemplos de medidores de vazão:
9
Figura 2.3 – Medidor magnético Profilux/Cerâmica. Fonte: Conaut.
Figura 2.4 – Medidor mássico MFM 4085 K. Fonte: Conaut.
10
Figura 2.5 – Medidor ultrassônico UFM 610 P. Fonte: Conaut.
Figura 2.6 – Rotâmetro modelo 250, com acoplamento magnético. Fonte: Conaut.
Figura 2.7 – Visor de fluxo modelo 095, com turbina. Fonte: Conaut.
11
2.1.2 Controladores
Os sensores são parte do sistema de controle. Eles necessitam do
controlador. O controlador eletrônico em um sistema de irrigação é considerado o "gerente"
da irrigação. É ele que armazena e processa todas as informações e faz o equipamento
trabalhar de forma ordenada e eficaz. Portanto, basta saber lançar as informações e deixar
por conta dele. Em geral os controladores apresentam uma fonte de alimentação de 110 ou
220V, com saída para as válvulas de 24 VAC, possuem de dois a quatro programas
independentes, programação dos dias da semana, três a dezesseis horários de partida
("start"), tempo programado em minutos e horas, mantém a hora, data e programação em
caso de queda de energia utilizando pilha alcalina nove volts, programação individual semiautomática ou manual e admitem o acoplamento de sensor de chuva, ou outros sensores de
controle da irrigação. Vários são os fabricantes destes controladores. Na Internet
http://www.lawngenie.com/manuals.htm
podem
ser
encontrados
os
manuais
de
programação da maioria deles. Como são fabricados para um determinado objetivo
possuem uma programação não flexível, ou seja, seu programa realizará apenas algumas
funções pré-determinadas e seu custo às vezes pode ser um fator de entrave para
determinados casos. Porém a programação, ou escolha das funções, destes controladores é
bastante amigável, o que facilita a vida do produtor. Dentre os disponíveis no mercado
podemos citar: MIRACLE® AC /DC, fabricado pela Motorola, é ideal para controle de
sistemas de irrigação em paisagismo e agricultura, funciona com sistema de energia AC –
220/110 V 50/60 Hz ou DC – Bateria de 9V, saída exclusiva para acionar válvula ou
motobombas, três programas independentes com quatro partidas "start times" cada um,
aciona até três saídas simultaneamente, reajuste do tempo programado de 10 a 200%
(Evapotranspiração), entrada para sensor de umidade de solo ou chuva – parar irrigação,
opção pausa devido chuva de até 99 dias, por programa e dias de irrigação – por dia da
semana ou intervalos de um até sete dias entre irrigações.
12
Figura 2.8 – Controlador de irrigação Miracle. Fonte: Motorola.
Para controlar um sistema de irrigação não precisamos nos prender aos
equipamentos encontrados no mercado para essa finalidade. Podemos criar nosso próprio
controlador e para isso podemos usar um PIC ou mesmo um PC.
Todo sistema de controle necessita de uma central de controle, na qual está
armazenada a programação que comanda todas as ações do equipamento. Uma central de
controle de fácil acesso e baixo custo é o computador pessoal (PC), que comanda
periféricos através de suas portas de comunicação.
Para receber e enviar informações, o PC utiliza suas portas de comunicação.
As portas de comunicação serão detalhadas no próximo item.
2.1.3 Atuadores
Os atuadores são parte fundamental de qualquer sistema automático, pois
são eles que vão realizar a tarefa definida pelo controlador. Em um sistema que não possui
sensores que “conversam” com o controlador, e passam as informações necessárias a este,
os atuadores trabalham de forma regular, ou seja, eles sempre trabalharão dentro de um
padrão definido pelo programa, os ruídos e distúrbios do meio não são considerados nesse
caso, é um sistema em malha aberta. Um sistema de controle mais evoluído utiliza
13
sensores, e dessa forma ele passa a trabalhar em malha fechada, por exemplo, um sistema
automático de irrigação que não possua sensores, sejam eles de umidade ou chuva,
trabalhará de acordo com o programa pré-estabelecido, não importando as condições
adversas do ambiente. Já sistemas equipados com sensores trabalham de acordo com o
ambiente e dessa forma produzem um trabalho mais qualificado e econômico.
Os principais atuadores de um sistema de irrigação são as motobombas e as
válvulas solenóides. Tem-se também os aspersores, tubos de gotejamento, válvula redutora
de pressão, válvula de segurança e alívio rápido de pressão e alguns acessórios. Como o
enfoque do trabalho é a automação da irrigação, não tem muita valia para o trabalho nos
prendermos aos componentes não controlados.
As válvulas solenóides controlam o fluxo de fluido. Basicamente em
irrigação, elas assumem status totalmente aberto ou totalmente fechado. A sua abertura ou
fechamento é controlado por um solenóide, ativado por corrente elétrica ou por pulsos
elétricos. Normalmente a tensão de acionamento dos solenóides é de 24 VAC,
apresentando uma corrente de atracação e outra de retenção, que variam em função do
fabricante. Porém, com estudos mais detalhados, dependendo da umidade do solo, elas
podem se encontrar meio-abertas, ou seja, em um determinado cultivo e em uma
determinada condição climática, a irrigação é necessária, porém, se as válvulas forem
totalmente abertas, o fluxo de água será excedente prejudicando assim a produção. Com um
sensor de umidade instalado e um bom programa de controle, pode-se controlar a vazão de
água liberada pela solenóide em uma determinada vazão adequada. As válvulas solenóides
têm uma grande importância no sistema de irrigação automático, pois são elas que vão
liberar o fluxo de água para os aspersores ou gotejadores. Inúmeros são os modelos de
válvulas solenóides existentes no mercado. Máquinas de lavar roupa também utilizam
válvulas solenóides. Exemplos de válvula solenóide:
14
Figura 2.9 – Esquema de uma Válvula Solenóide. Fonte: Rain Bird
Figura 2.10 – Válvula de controle com solenóide. Fonte: Rain Bird
Figura 2.11 – Válvula elétrica com controle solenóide. Fonte: Rain Bird.
As motobombas servem para alimentar a rede que leva a água para os
aspersores. Em um sistema automatizado, as motobombas são acionadas automaticamente
e tem-se a vantagem de poder definir prioridades de consumo de energia em casos onde há
uma grande demanda de energia. Pode-se desligar as motobombas se algum outro sistema
15
que consome muita energia estiver funcionando e tiver prioridade sobre elas. Geralmente as
motobombas servem para impor maior vazão ao sistema.
Figura 2.12 – Motobombas. Fonte: Carrér.
Figura 2.13 – Motobomba P 840 - Alta vazão. Fonte: STIHL.
2.1.4 Portas de Comunicação
A comunicação é feita com o meio externo através de dispositivos acessados
pela CPU, com endereçamentos (portas). Um PC geralmente possui uma configuração com
as seguintes portas: paralela, serial e USB.
A porta paralela é uma das interfaces de comunicação entre um computador
e seus periféricos. Ela é chamada de paralela, pois a sua ligação com os periféricos é feita
16
através de condutores paralelos. A taxa de transferência de dados da porta paralela é de
150Kbps, sendo que sua comunicação é unidirecional e feita através de três registradores:
•
Registrador de Dados: está associado ao endereço base (378h), sendo utilizado
como saída de 8 bits (1 Byte);
•
Registrador de Status: está associado ao endereço base (379h), sendo utilizado
como entrada de dados de 5 bits;
•
Registrador de Controle: está associado ao endereço base (37Ah), sendo utilizado
como entrada ou saída de 4 bits.
O projeto da IBM para a comunicação paralela exige 25 conexões
totalmente separadas (conector DB25), o que resulta em um cabo grosso e comprimido.
Sendo assim os sinais de dados e controle devem trafegar apertados neste cabo, podendo
reagir uns com os outros, atrapalhando a comunicação à longa distância.
Embora a porta paralela na maioria das vezes seja usada para conexão de
periféricos, ela também pode ser usada para aceitar dados de dispositivos externos,
viabilizando sua utilização para diferentes tipos de aplicações, como, por exemplo, controle
de motores, interligação entre computadores e aquisição de dados, etc.
A comunicação através da porta serial é a forma mais simples de
envio/recepção de dados utilizada pelo computador. Ela é feita através de uma linha para
envio de dados, outra para recepção e outras duas que controlam as anteriores. Operando
sob um protocolo de padrão RS-232 ela transforma bytes em cadeias de pulsos que
caminha bit a bit, com taxa de transferência de 19600bps, tornando sua velocidade de
comunicação lenta em relação à da porta paralela.
Muitos infortúnios podem cair sobre o vulnerável bit de dado serial à medida
que percorre a conexão, causando erros em todos os bytes seguintes. Para evitar esse
desastre, a comunicação serial é feita através de dois métodos:
- Comunicação Síncrona: um clock sincronizado entre a unidade de transmissão e recepção,
temporiza com precisão o período que separa cada bit de dados. Um bit a mais ou a menos
pode ser inesperado no fluxo de bits. Apenas olhando o relógio, pode-se distinguir as
comunicações por computador, um bit de dados real do ruído de interferência.
17
- Comunicação Assíncrona: Marcadores indicam o início e o fim de um pequeno fluxo de
bits (bytes) a serem lidos.
Devido a esta baixa sensibilidade a ruídos a conexão pela porta serial é
indicada para realizar comunicações a longas distâncias.
Idealizado em 1995 por um grupo de empresas de tecnologia, o padrão USB
1.0 permite que sejam conectados até 127 equipamentos em cada PC com velocidades de
transmissão de 1,5 ou 12Mbps, tudo isso sem a necessidade de desligá-lo para fazer as
ligações e com reconhecimento automático dos aparelhos adicionados, é o chamado hot
plug and play.
A proposta é substituir a infinidade de conectores diferentes empregados nos
computadores atuais, para comunicação com as portas seriais, paralelas, saídas para
teclado, mouse, joysticks e outros acessórios. O padrão USB pode ser utilizado na maior
parte dos acessórios de média e baixa velocidade.
A interconexão física do USB usa a topologia tiered-star (estrela disposta
em camadas/níveis). As transferências de sinais e alimentação são feitas através de um
cabo, com quatro fios: um par para transmissão de sinais (que ocorre ponto a ponto), e
outro pra distribuição de energia elétrica.
2.2 Vantagens da Irrigação Automatizada
Segundo Gornat & Silva (1990), a automatização do sistema de irrigação
apresenta as seguintes vantagens:
•
Melhor administração da propriedade ou projeto agrícola: controle centralizado,
tomada de decisão automática, monitoração ou supervisão da operação do sistema,
obtenção do histórico completo das aplicações de águas e fertilizantes;
18
•
Obtenção de maiores produtividades a um menor custo: controle preciso do tempo
de aplicação da irrigação, irrigações sob condições ótimas, medições precisas das
quantidades de água e fertilizantes;
•
Economia de mão-de-obra: abertura e fechamento automático de válvulas e
registros, operação automática de bombas de recalque e de reforço;
•
Economia de água;
•
Economia de energia;
•
Economia de fertilizantes: quantidades administradas de forma precisa, solução
balanceada apropriadamente.
Um sistema automático bem planejado pode responder às situações de
adversidade de forma inteligente, evitando que o problema de agrave. Pode-se também
instalar um sistema de alarme que alerta o produtor sobre erros no sistema. Mesmo que o
produtor esteja fora da propriedade, é possível a implantação de um sistema mais
sofisticado que liga pra um determinado telefone e informa sobre erros (Fialho, 1999).
Além disso, a automação permite monitorar e controlar o funcionamento de
um sistema físico de forma segura, rápida e automática. Esse controle visa monitorar
tarefas rotineiras, reagindo a certas características previsíveis do ambiente (Silva, 2000).
O monitoramento automático, embora ainda incipiente no Brasil, constitui
uma ferramenta importante no controle das aplicações de água para as plantas e uma maior
freqüência de seu uso, assegurando a sustentabilidade do sistema a ser irrigado e a
preservação do meio ambiente. Nos sistemas de irrigação em jardins, é comum a adoção de
controle automático da irrigação com o uso do temporizador eletrônico, equipamento que
promove a abertura ou acionamento de motobombas em períodos de tempo prédeterminados. Entretanto, esses equipamentos não levam em consideração o teor de água
do solo ou outra variável do sistema solo-planta-atmosfera. Sistemas automáticos
utilizando o tensiômetro existem comercialmente no mercado, porem em pequena escala. O
desenvolvimento dessa metodologia constitui uma linha de pesquisa e extensão no sentido
de sempre contribuir para o advento dos equipamentos eficientes no controle de irrigação
de baixo custo e acessível a agricultores (Carvalho et al., 2001).
19
2.3 Avaliação do sistema de aspersão
O planejamento racional de um sistema de aspersão requer, além de outras
informações, o conhecimento da distribuição e quantidade de água aplicada, bem como a
taxa de aplicação. Esta avaliação do sistema de aspersão não deve ser feita somente para
fins de projeto, visando à obtenção de dados reais para os cálculos e uma verificação do
desempenho do equipamento, mas também em sistemas já em operação, com fins de
verificar sua condição e produzir subsídios para um melhor desenvolvimento na irrigação
(Ollita, 1983).
Um dos processos de avaliar o desempenho de um sistema de irrigação é a
uniformidade com que a água é distribuída no campo. Esta técnica é igualmente importante
seja a água aplicada por um sistema superficial, subterrâneo ou por aspersão. Hart (1970)
cita um processo que consiste em dividir o campo em um número de partes com tamanho
igual, medir a quantidade média de água aplicada a cada uma dessas áreas, e compará-las
entre si. No caso do sistema de aspersão, isto pode ser conseguido através de recipientes
coletores da precipitação colocados em locais representativos em cada área unitária.
CHRISTIANSEN (1942 a) aplicou o conceito de medir a uniformidade da
distribuição da água por um sistema de aspersão, ele chamou esse método de “coeficiente
de uniformidade” (CU), expresso pela equação:
⎛ ∑d ⎞
⎟
CU = 100⎜1 −
⎜ nM ⎟
⎝
⎠
Onde: CU = coeficiente de uniformidade em %;
d = desvio do valor médio (M);
M = média das observações;
20
N = número de observações.
O valor de CU é o processo estatístico mais comum para a avaliação de sistemas de
aspersão (CORRY, 1958), sendo que, por convenção, o valor de 80% é o mínimo aceitável
para um desempenho normal do aspersor (ABNT, NBR 14244 1998).
2.3.1 Recomendações para a realização do teste
A American Society of Agricultural Engineers (ASAE), através de seu
Comitê de Irrigação por Aspersão, apresentou uma série de recomendações para uma
realização correta do teste com o aspersor (ASAE, 1966):
•
Localização – os aspersores devem ser localizados numa área com solo nu ou
cuja vegetação tenha uma altura menor que 8cm. A declividade máxima é de
1% para aspersores com vazão menor que 2,2 l/s e 2% para outros aspersores.
•
Coletores – os coletores da precipitação (latas) devem ser todos do mesmo
tamanho, colocados em posição vertical para receber a precipitação e dentro de
um plano horizontal, espaçados uniformemente formando um quadriculado em
volta do aspersor.
•
Medições – deve-se medir a pressão do aspersor com um tubo de Pivot
colocado no bico principal. Esta pressão não deve variar mais que 3% durante a
realização do teste.
•
Duração – o teste deve prolongar-se até que a altura média de água coletada nos
recipientes seja no mínimo 6mm.
•
Outros – deve-se medir a grandeza e direção do vento, bem como a taxa de
evaporação durante a realização do teste.
21
2.3.2 Avaliação do sistema
Os parâmetros para a avaliação do sistema de aspersão são os seguintes
(Merriam et al., 1973):
2.3.2.1 Uniformidade de distribuição (UD)
Para determinar se os aspersores estão operando com uma eficiência
aceitável e econômica, a uniformidade de distribuição (UD) é calculada como a relação
entre as taxas mínima e média coletadas.
UD =
taxa mínima coletada
x100
taxa média coletada
Desde que pode haver variações nas leituras, a taxa mínima coletada é
considerada como a média dos menores valores obtidos em ¼ do número de recipientes.
2.3.2.2 Coeficiente de uniformidade (CU)
O coeficiente de uniformidade é expresso como:
⎛
desvio
CU = ⎜⎜ 1 −
⎝
médio da taxa média
taxa média coletada
coletada ⎞
⎟⎟ x100
⎠
22
2.3.2.3 Eficiência de irrigação (Ei)
Para determinar a efetividade com que o sistema de aspersão pode utilizar o
suprimento de água, determina-se a eficiência de irrigação (Ei) pela expressão:
Ei =
taxa mínima coletada
x100
taxa média aplicada
A diferença entre a água coletada e a água aplicada é uma medida
aproximada das perdas por evaporação. A taxa média de água aplicada é calculada pela
vazão descarregada pelo aspersor na área compreendida pelos espaçamentos dos aspersores
e das laterais, como:
taxa de aplicação =
100xQ
(mm / h)
E1 xE2
Onde: Q = vazão do aspersor (m3/h)
E1 = espaçamento do aspersor (m)
E2 = espaçamento das laterais (m)
2.3.3 Procedimento no campo
O primeiro passo é a escolha de um local no campo para o teste ao longo da
linha lateral de aspersores, no caso da avaliação de um sistema já existente, ou então a
montagem de uma lateral com vários aspersores ou mesmo de um único aspersor, para o
caso de se pretender testar o equipamento, visando ao conhecimento antecipado de seu
desempenho no campo. Sabe-se que 50% da perda de carga ocorre nos primeiros 20% do
comprimento. Quando a lateral está em nível, a pressão representativa irá ocorrer próximo
do primeiro 1/3 do comprimento.
23
Um mínimo de 24 recipientes deve ser disposto no local escolhido em um
quadriculado não excedendo 3,0 x 3,0 metros de espaçamento. Os recipientes devem estar
localizados entre 2 ou 3 aspersores de modo a cobrir toda a largura em que a água vai ser
aplicada.
Para determinar a evaporação durante o teste, é utilizado um recipiente com
uma quantidade da água medida antecipadamente e por medição posterior no final do teste
determina-se à taxa de evaporação.
Os volumes de água coletados nos recipientes devem ser medidos com uma
proveta graduada, e posteriormente convertidos em altura de água e taxa horária de
aplicação, pela consideração da área do recipiente e duração do teste.
2.3.4 Coeficiente de variação de fabricação
No dimensionamento de sistemas de irrigação, deve-se considerar a
variabilidade existente entre os emissores, decorrente do processo de fabricação. A
fabricação deverá ser exata, uniforme e constantemente monitorada, pois pequenas
variações poderão causar grandes diferenças de vazão (Vieira, 1996).
Solomon (1979) diz que o fato de os emissores usados em irrigação
localizada possuírem dimensões reduzidas dificulta a sua construção precisa, fazendo com
que a variação de vazão em função da variação na construção dos emissores não possa ser
ignorada.
Botrel (1984) acrescenta que pequenas variações nesses orifícios de saída de
água (1 a 2mm) provocam grandes diferenças na vazão a uma mesma pressão. Essas
diferenças nos orifícios podem ultrapassar a 10%, tornando-se nesses casos mais
24
importantes que as variações de vazões devidas às diferenças de pressão ao longo da linha
lateral.
Keller & Karmeli (1974) comentam sobre a uniformidade dos sistemas de
irrigação, e citam que esta uniformidade depende também da precisão com que os
emissores são fabricados.
Solomon (1979) fez diversas considerações que fornecem uma justificativa
supondo que as vazões dos emissores, em uma dada pressão, são normalmente distribuídas
em função do processo de fabricação.
Assumindo que as diferentes vazões ocasionadas pelos processos
construtivos têm distribuição normal, isso permite utilizar os conceitos de estatística
correspondentes a essa destruição pára conclusões quantitativas.
O mesmo autor propôs, então, um coeficiente de variação de fabricação
(CVF), dado pela expressão:
CVF =
S
,
qm
sendo que:
CVF: Coeficiente de variação de fabricação (%);
S:
desvio-padrão da vazão (Lh-1);
qm:
vazão média de uma amostra adequada de emissores testados a uma pressão normal
de operação (Lh-1).
Existem diversas classificações de emissores quanto à uniformidade de
vazão, como Solomon (1979) e ABNT (1986), apresentadas na Tabela a seguir:
25
Tabela 2.1 – Classificação da uniformidade de vazão segundo Solomon e ABNT.
Fonte: Solomon e ABNT.
O CVF é um importante fator que influencia a uniformidade de emissão de
água e, portanto, a eficiência do sistema de irrigação. Segundo Solomon (1979), os valores
típicos oscilam entre 0,02 e 0, 10, podendo algumas vezes ser observados valores mais
elevados.
Torna-se importante, portanto, quando se seleciona um emissor, conhecer o
CVF que deve ser fornecido pelo fabricante. Para a determinação experimental do CVF e
da relação vazão versus pressão, a ABNT (1986) estabelece que seja estudada uma amostra
de no mínimo 50 unidades para gotejadores 2 20 para microaspersores, obtidas
aleatoriamente na linha de produção do fabricante.
2.3.5 Relação vazão versus pressão
26
A relação entre vazão e pressão é uma característica hidráulica que
influencia diretamente o desempenho do sistema. Essa característica é influenciada pelo
tipo de emissor, material e processo de fabricação.
Segundo Keller & Karmeli (1974), a equação que descreve a vazão de
emissores pode ser apresentada como:
q = k.H x
Temos que:
q:
vazão do emissor (Lh-1);
k:
coeficiente específico de cada emissor;
H:
pressão na entrada do emissor (kPa);
x:
constante que caracteriza o regime de escoamento.
Segundo Vieira (1996), por melhores que sejam os processos de fabricação
dos emissores, ocorrem diferenças na fabricação, refletindo-se assim nos valores dos
coeficientes da equação de fluxo do emissor (k e x).
O expoente ‘x’ da equação potencial representa o regime de escoamento dos
emissores. A classificação apresentada por Keller & Karmeli (1974) pode ser observada na
tabela a seguir.
Tabela 2.2 – Classificação do regime de escoamento de acordo com o coeficiente ‘x’ da
equação potencial, representativa da relação vazão versus pressão. Fonte Keller & Karmeli.
27
Solomon (1979) comenta que a redução na vazão é menos influenciada pela
variação da pressão à medida que o valor de ‘x’ decresce. Os valores de ‘x’ relacionam-se
com o regime de escoamento: para regime turbulento, x=0,5, e para regime laminar, x=1,0.
2.4 Enfoque sistêmico
Para a utilização do termo sistema, será realizado uma revisão sobre este
conceito, buscando para isso sua fundamentação teórica, segundo estudo a seguir:
2.4.1 História e revisão
A abordagem sistêmica, estruturada a partir da década de 1950, sobretudo,
da teoria geral dos sistemas-TGS, encontra seus primeiros contornos no final do século
XVII. Neste sentido FOUCAULT (1990) observa que o conceito de organização já se
mostrava visível na história natural do século XVII. Na literatura socialista, o enfoque
sistêmico “foi argumentado filosoficamente por Carlos MAX, a mais de cem anos e não só
argumentado e sim aplicado ao analisar a produção capitalista, cujo fruto se conhece em EL
CAPITAL”.
Foi, porém, com os estudos do cientista alemão Ludwig Von
BERTALANFFY, após a década de 1920, que a concepção sistêmica, ou de sistema, tal
qual é conhecida atualmente no mundo acadêmico e da pesquisa, começa a incorporar a
TGS. Portanto, baseada nas concepções de BERTALANFFY, foi formulada a Teoria Geral
dos Sistemas, visando à consecução de objetivos comuns. A partir desta abordagem, o
28
sistema pode ser caracterizado como sendo um “conjunto de partes relacionadas, apesar de
independentes, sendo, cada uma delas dependentes entre si”.
Em 1930, também, outro filósofo e antropólogo belga, Claude LÉVISTRAUSS seguidor dos princípios do estruturalismo, afirmava que, “uma estrutura oferece
um caráter de sistema, constituindo em elementos combinados de tal forma que qualquer
modificação em um deles implica em uma modificação em todos os outros”.
Se a BERTALANFFY coube a organização dos postulados teóricos
fundamentais da teoria sistêmica, sua concepção aplicativa encontrará em SHURCHMAN
o seu tradutor, conforme assinala RIBEIRO (1992).
“A idéia principal de SHURCHMAN é voltada para as características
intrínsecas do sistema, ou seja, o todo é pensado como o objetivo central do sistema e as
partes como os objetivos secundários. Esses objetivos, central e secundários, podem ser
identificados com uma visão totalizante, globalizante e seu ‘repartimento’ como a
capacidade que o sistema tem de se comportar e/ou decompor em subsistemas. A idéia
norteadora é o aspecto planejamento-controle com vistas à sua finalidade única: a
eficiência do todo e das partes que compõem esse todo para alcance de um fim proposto”.
(ibid, 1992, p76).
Ao longo da sua estruturação teórica, a literatura sistêmica aponta para
quatro conceitos fundamentais que permeiam a teoria dos sistemas: complexidade,
interação, organização e totalidade.
MORIN (1981, p.99) observa que a maior parte das definições de sistema
carrega, sobretudo, duas características: interação e totalidade. Como tal, a seu ver é
necessário explicitar estas características em suas relações com o que chama “idéia de
organização”. A idéia de organização encontra-se evidenciada face às de totalidade e
interação na definição de sistema de SAUSSURE (ibid, p.99): “uma totalidade organizada,
feita de elementos solidários que só podem definir-se uns em relação aos outros em função
do lugar que ocupam nessa totalidade”.
Considerando indissociáveis as três noções, interação, organização e
totalidade, concebe-se o sistema como “unidade global organizada de inter-relações entre
elementos, ações ou indivíduos”. A totalidade sistêmica é algo além da soma das partes,
29
implicando em qualidades emergentes que as suas partes isoladamente não possuem. Essa
nova unidade, que resulta das relações entre as partes, é forjada simultaneamente a uma
organização que isola o caos, o imprevisto e o conflito, sendo não apenas um estado como
também um processo.
“... não podemos reduzir nem o todo às partes, nem as partes ao todo, nem
o uno ao múltiplo, nem o múltiplo ao uno, mas temos que tentar conceber em conjunto, de
modo simultaneamente complementar e antagônico, as noções de todo e partes, de uno e
diverso”. (MORIN, ibid., p. 103).
Embora se trate de um todo emergente, deve-se evitar confundir a
emergência,enquanto um traço próprio do todo, e a totalidade. Na perspectiva de MORIN,
distinguindo-se das análises mais presentes na literatura sistemista, o todo comporta
“decisões, sombras e conflitos”, já que a organização transforma a diversidade em unidade,
sem anular a diversidade, estando apta para criar a diversidade “na e pela unidade”.
Ainda MORIN (ibid., p. 124) chama a atenção para a complexidade da
idéia, demasiada vezes homogeneizada, de totalidade, concebida por uma simplificação
reducionista: “... a verdadeira totalidade esta sempre fendida, fissurada, é incompleta . A
verdadeira concepção da totalidade reconhece a insuficiência da totalidade. É o grande
progresso, ainda desapercebido e desconhecido em França, de Adorno sobre Hegel, de
quem é fiel continuador: ‘a totalidade é a não verdade’”.
Temos que ter claro que a teoria dos sistemas possui suas limitações e não
deve ser utilizada indiscriminadamente.
A teoria dos sistemas possui, também seus críticos, notadamente quando a
mesma é utilizada indiscriminadamente.
CASTRO (1986, p. 26), afirma: “O enfoque sistêmico pode ser analisado no
sentido mais amplo ou restringi-lo a certas situações”.Em seu sentido mais restrito o
mesmo está vinculado ao conhecimento de uns ou outros objetos e fenômenos da realidade.
Ainda segundo CASTRO, “os teóricos burgueses o apresentam como uma filosofia
especial, como um fundamento metodológico da ciência e até como uma nova concepção
do mundo, algo assim como ‘a chave mágica, capaz de abrir a plenitude das riquezas da
realidade’”.
30
Na mesma direção, LYOTARD (1993, p.20), ao analisar o modelo de
sociedade como um todo funcional, remete-se à visão de Parsons sobre a sociedade como
um sistema auto-regulável.
“Para os teóricos de hoje, (o sistemismo) a systemtheorie é tecnocracia, é
mesmo cínica, para não dizer desesperada; a harmonia entre necessidades e esperanças
dos grupos com funções que asseguram o sistema não é mais que o faz programar-se a si
mesmo como máquina inteligente, é a otimização da relação global entre os seus ‘input e
output’, ou seja, o seu desempenho. (...)” .
BOURRICAUD e BOUDON (1993, p.509) ressaltam também os limites da
teoria sistêmica sob a perspectiva da Sociologia.
“A noção muito geral de sistema só é verdadeiramente útil como idéia
diretriz. Ela só assume um sentido preciso quando aplicada á análise de processos e
sistemas concretos, isto é encerrados em sua singularidade”.
Ao abordar o modelo sistêmico na Educação, APPLE (1982, p. 160) ressalta que
este enfoque constitui uma retórica social conservadora, questionando sua tendência em
negar o conflito.
“A ordem e o consenso tornam-se extraordinariamente importantes; o
conflito e a desordem são vistos como antitéticos ao funcionamento harmonioso do
sistema. É, portanto, mais uma vez ignorado o fato de que o conflito e a desordem são
extraordinariamente importantes para impedir a retificação de padrões institucionais de
interação”.
Já PIZZA JR. (1986, p. 61) ao considerar ingênuas as afirmações de
Bertalanffy a respeito da “ciência dos sistemas” volta-se para a análise da amplitude e
deficiências da abordagem sistêmica na administração, sugerindo algumas atitudes
minimizadoras das limitações que identifica:
“Ao admitir que conceitos propostos sejam suficientemente amplos para dar
consistência à teoria geral dos sistemas, mas também para comprometer suas intenções de
análise; ter em vista que a idéia dos sistemas deve estar sempre presente na mente do
analista, mas que utilizar indistinta e indiscriminadamente os seus conceitos pode
constituir prova de estreiteza mental; os sistemas correm o risco de justificar a
31
conservação do status quo, mascarado por linguagem inovadora; a idéia de
interdependência e interdisciplinaridade envolve atitude aberta, receptiva, parentética, de
atuação e análise critica, o que, em última análise, é o que propõe a teoria dos sistemas,
mas exige necessariamente formação adequada e permanente questionamento dos próprios
resultados que são atingidos”.
Toda esta análise histórica realizada serve para fundamentar qual concepção
será adotada para este trabalho de investigação.
Concordamos, finalmente, com a afirmativa de CASTRO (1986, p.27)
quando diz que muito se pode aportar ao trabalho dos pedagogos, a concepção sistêmica;
porém, é necessário direcionar este enfoque na sua justa medida, pois nos países
capitalistas às vezes se utiliza com um marcado caráter divercionista. Também às vezes se
utiliza, equivocadamente, a idéia do sistema de meios de ensino, já que se concebe como
um conglomerado de equipamentos, como uma ampla diversidade de recursos em função
do trabalho docente, porém sem um aprofundamento nas relações e funções de cada um
deles. O conceito de sistema é mais amplo.
2.4.2 O enfoque sistêmico adotado
O presente trabalho visa um estudo dos sistemas de irrigação tanto predial
quanto agroindustrial, como também alguns estudos de caso. O objetivo deste estudo
teórico é levantar as vantagens da automação dos sistemas de irrigação e a partir deste
trabalho uma análise dos benefícios que a automação trará a estes sistemas.
Em CASTRO (ibid., p. 26), tem-se o enfoque sistêmico se apoiando na
categoria filosófica do geral e do particular, que expressa “a relação dos conjuntos de
32
objetos e o nexo que os une, fazendo aparecer novas propriedades e regularidades não
inerentes aos objetos isolados, tendo como particularidade o nexo que os une determina as
características do todo, além de se sustentar no conceito da unidade material do mundo”.
Concordando com CASTRO (ibid., p. 27), será adotado o enfoque sistêmico
na justa medida; nele será adotado a “categoria filosófica do particular” ou seja, será
abordado o sentido mais restrito, vinculado ao conhecimento de objetos e fenômenos da
realidade.
Não esquecer, porém, que todo sistema convenientemente determinado, se
compõem de múltiplos subsistemas e estes, por sua vez, de tantos outros quanto a sua
natureza o permita.
2.4.3 Propriedades do sistema
Será adotado o critério de Victor AFANASIEV, citados por Castro, para
descrever as quatro propriedades do sistema: Componente, Estrutura, Funções e Integração.
- Componentes são os elementos que constituem o sistema e suas relações.
- Estrutura é o modo de interconexão dos componentes do sistema.
- Funções são as ações que um sistema pode desempenhar, tanto de
subordinação vertical como de coordenação no sentido horizontal.
- Integrações são os seus mecanismos, os quais asseguram a sua
pedurabilidade e se apóiam na cibernética e na direção.
2.4.3.1 Componentes propostos
33
Cada variável, sensores, controladores e atuadores se relacionam e se
complementam e quando em seus corretos valores, resguarda o perfeito funcionamento da
irrigação automatizada e controlada, portanto, constituem os componentes do sistema
proposto.
2.4.3.2 Estrutura
Os componentes em investigação, sensores, controladores e atuadores se
relacionam e se interconectam de forma a se complementarem e também, quando em seus
valores corretos garantem as condições ideais para o desenvolvimento otimizado da
automação. Qualquer alteração significativa em um dos componentes afeta o desempenho
global do sistema; por exemplo: a falha do atuador (válvula solenóide) consiste em uma
não irrigação.
2.4.3.3 Funções
As ações que o sistema pode desempenhar, tanto de subordinação vertical
como de coordenação no sentido horizontal, ficam explicitadas na forma que este pode,
quando colocado em prática, influenciar a automação positivamente quando em equilíbrio
ou, negativamente quando qualquer um de seus componentes extrapola seus valores ideais.
A subordinação vertical na busca da condição ideal depende da coordenação horizontal da
interconexão entre seus componentes.
34
2.4.3.4 Integração
A integração que se dá através da boa comunicação entre os seus
componentes e de um controle adequado, garantindo a direção necessária para as condições
mais favoráveis ao desenvolvimento da automação. É condição necessária e fundamental a
atuação integrada dos componentes de forma a permitir que o comportamento do sistema
atue conforme previsto e ou planejado.
2.4.3 Conclusão sobre o enfoque sistêmico adotado para esta investigação
Fica evidenciado que para esta investigação, o conceito de um sistema
vinculado ao conhecimento de objetos e fenômenos da realidade, ou seja “uma categoria
filosófica particular”, será de grande valia para o processo de automação.
3 DESENVOLVIMENTO
O presente trabalho foi conduzido no campo teórico, analisando aspectos
pertinentes às vantagens da irrigação automatizada e a partir dos resultados propor uma
automatização eficiente e de baixo custo. Foram analisados dois estudos de caso, um no
campo da agricultura, em pequenas áreas, e outro dentro de paisagismo, um condomínio
onde a automatização do sistema de irrigação poderá trazer grandes vantagens.
35
A automação da irrigação em grandes lavouras não desperta interesse de
estudo, pois provando que ela pode ser viável em pequenas plantações, certamente ela será
viável em cultivos de grande porte.
Seria interessante propor a automação em grandes cultivos devido ao
desafio, pois o grau de dificuldade de implantação do sistema é com certeza maior que em
pequenos cultivos, porém, para nível experimental e provando que a automação
proporciona uma redução nos custos, e que com o tempo o capital investido inicialmente é
recuperado o objetivo deste estudo teórico será alcançado.
3.1 Estudo de caso
3.1.1 Sistemas de Irrigação Automatizados para Agricultura de Pequeno Porte
Estudo de caso de um experimento de implantação do sistema de irrigação
automatizada em áreas agrícolas de pequeno porte. Experimento esse conduzido em campo
experimental e Laboratório de Hidráulica do Departamento de Engenharia Rural da
ESALQ/USP, onde um sistema automatizado de irrigação constituídos de uma linha de
emissores que se move em linha reta, irrigando basicamente uma faixa retangular. Esse
experimento foi desenvolvido e analisado por Rodrigo de Souza em 2001, como
dissertação de mestrado. Por ser um ótimo material, parte dele foi incluída nessa
monografia, e feita uma análise deste, para comprovação dos objetivos desta monografia.
3.1.1.1 Concepção do sistema
36
O desenvolvimento do sistema automatizado visou verificar a metodologia
de funcionamento, além de especificar todos os componentes. A avaliação do sistema
buscou determinar a uniformidade de distribuição da água do sistema, o coeficiente de
variação de fabricação e a relação vazão versus pressão dos emissores.
A água é aplicada por emissores, nesse caso foram utilizadas agulhas, com a
especificação 25x8, comprimento 25mm e diâmetro externo de 0,8mm, que estão
igualmente espaçados ao longo de um tubo de cobre. Esse tubo de cobre é um tubo d apoio
e tem comprimento de 1,47m e diâmetro de 22mm, com 24 agulhas espaçadas de 5cm e
altura de 85cm acima da superfície do solo.
A pressão da água na entrada do tudo é medida. Para isso o tubo de apoio
possui em sua extremidade uma luva de PVC de 20mm, com uma conexão de saída. O
sistema possui registro manual e água é injetada no sistema através de uma mangueira de
16mm de diâmetro, que está conectada na extremidade do tubo de apoio. Para evitar
acumulo de ar no interior das canalizações do sistema de irrigação, na extremidade oposta
do tubo foi acoplado um Cap de PVC de 20mm, e antes da irrigação começar este é
retirado e assim evita ar no sistema.
A tubulação que leva a água aos canteiros é de PVC rígido, usado em
instalações prediais, 20mm de diâmetro e fica enterrada na parte central das fileiras de
canteiros no sentido transversal. Cada canteiro é alimentado e controlado individualmente,
portanto a tomada d’água é composta por uma curva de 90º de PVC e válvulas solenóides.
O carrinho (equipamento com as agulhas) possui rodas em sua extremidade,
que correm sobre arames de aço, devidamente esticados e presos em mourões, assim
percorrendo toda a área de irrigação.
Para manter a velocidade de deslocamento do equipamento constante, um
sistema de tracionamento foi construído, e com isso visando uma lâmina de irrigação
constante ao longo dos canteiros. Um motor de corrente contínua de 12 volts, alimentado
por uma bateria tracionou o sistema. O motor utilizado foi parecido com os motores
utilizados para movimentar os limpadores de pára-brisa de automóveis. O motor traciona o
37
sistema através de um cabo de aço preso no ponto (a) do carrinho, circunda a polia do
motor, passa pela polia presa à roldana e é preso no ponto (b) do carrinho.
Em sistema de trilho, as roldanas se deslocam sobre dois arames de aço,
espaçados de 1,5m. O alinhamento do sistema é garantido pelas ranhuras nas rodas que
evitam que elas “escorreguem” desalinhando o sistema.
Figura 3.1 – Esquema em perspectiva do sistema de irrigação. Fonte: Dissertação de
Mestrado de Rodrigo Souza.
38
Figura 3.2 – Vista da roldana no final do canteiro. Fonte: Dissertação de Mestrado de
Rodrigo Souza.
O controlador do sistema de automação é um computador pessoal (PC). Este
controla o movimento dos carrinhos e o acionamento das válvulas de água e fertilizante. É
um sistema de controle em malha aberta. Não possui sensores de chuva ou umidade, apenas
trabalha dentro daquilo que foi programado para fazer. O ambiente de programação
utilizado para a criação do programa de controle foi o Delphi. Foram desenvolvidos três
sistemas iguais e independentes, com uma exceção para o carrinho III que não possui
válvulas solenóides que permita a injeção de fertilizante. Cada sistema irriga uma faixa
retangular de 15,6m por 1,25m.
A estrutura de campo foi aproveitada de um outro experimento parecido,
porém de operação manual e utilizava apenas um carrinho para os três canteiros.
39
Figura 3.3 – Vista superior do sistema de irrigação. Fonte: Dissertação de Mestrado de
Rodrigo Souza.
3.1.1.2 Avaliação do sistema
O sistema foi avaliado pela medição da distribuição de água no campo,
vazão individual das agulhas e pelo cálculo do coeficiente de uniformidade (CU) do
equipamento, coeficiente de variação de fabricação e relação vazão versus pressão dos
emissores.
40
3.1.1.2.1 Uniformidade de distribuição de água
O coeficiente de uniformidade do equipamento foi calculado com base no
coeficiente de uniformidade de Cristiansen, como visto na revisão teórica.
Sobre uma malha de 13x4 pluviômetros, o equipamento realizou dez
passadas, sendo suficiente para que houvesse uma quantidade mínima de água nos
coletores para ser calculado o coeficiente. Cada canteiro foi dividido em quatro setores.
Para cada setor foi feita uma média das quatro fileiras. Sendo assim, cada setor ficou
representado por uma fileira única de 13 pluviômetros. O Coeficiente de Uniformidade
final foi calculado com os valores da malha final resultante da união das fileiras
representativas de cada setor como mostra a figura abaixo.
Figura 3.4 – Esquema de coleta dos dados de precipitação dos pluviômetros para o setor 1.
Fonte: Dissertação de Mestrado de Rodrigo Souza.
Os pluviômetros utilizados no teste possuíam área de coleta de 50,4cm2, e
foram espaçados uniformemente ao longo de linhas perpendiculares à direção de
caminhamento do carrinho.
41
A pressão da água na entrada do equipamento foi ajustada e mantida em
50kPa durante todo o ensaio. A lâmina coletada foi registrada pela medição do volume de
água armazenada nos coletores.
O coeficiente de uniformidade foi utilizado como indicativo da performance
do equipamento e para essa classificação foram utilizados os parâmetros apresentados pela
ANBT, a NBR 14244 de 1998.
CU
Uniformidade de distribuição de água
Menor que 80%
Ruim
80 a 84%
Regular
85 a 89%
Boa
Acima de 90%
Muito boa
Tabela 3.1 – Classificação da uniformidade de distribuição de água segundo normas da
ABNT. Fonte: ABNT.
A lâmina média aplicada em cada canteiro foi de 6,12mm, 6,47mm e
6,60mm, respectivamente para os canteiros I, II e III. Os valores médios de lâmina aplicada
em cada setor dos canteiros podem ser vistos na tabela abaixo.
Lâmina (mm)
S1
S2
S3
S4
Média
Canteiro I
6,2
6,3
6,3
5,8
6,1
Canteiro II
6,4
6,4
6,5
6,6
6,5
Canteiro III
6,6
6,7
6,7
6,4
6,6
Tabela 3.2 – Lâmina média aplicada em cada setor. Fonte: Dissertação de Mestrado de
Rodrigo Souza.
42
A variação da velocidade periférica do motor é um dos fatores principais dos
diferentes valores de lâmina média aplicada. O motor o canteiro I estava com uma rotação
de 28,9 rpm, o motor do canteiro II, 24,9 rpm e motor do canteiro III, 26,1 rpm.
Os motores utilizados nesse sistema apresentam apenas duas velocidades,
portanto, o valor da lâmina deve ser controlado pelo número de passadas. Neste caso, para
que se aplique a lâmina necessária com certa precisão, deve-se aplicar uma lâmina pequena
por passada. Deve-se evitar um tempo total entre duas passadas longo, devido à
evaporação. No presente caso, foi aplicado uma lâmina média de 0,64mm e tempo médio
de 6,7min por passada.
Seria interessante que o sistema possuísse um dispositivo para regulagem da
velocidade do motor, como um inversor de freqüência, por exemplo, com isso seria
possível alcançar a lâmina necessária em apenas uma passada, o que otimizaria o uso do
sistema.
Os três sistemas apresentam boa uniformidade de distribuição de água,
segundo classificação da ABNT (1998). Os coeficientes de uniformidades apresentados
(CU) foram 86,3%, 88,0% e 87,7%, respectivamente para os canteiros I, II e III.
Uma variável de forte influência na uniformidade de distribuição de água é a
altura de caminhamento do carrinho. Se o sistema estiver muito próximo do solo, não
haverá uma fragmentação do jato d’água, concentrando a precipitação em determinadas
áreas. Por outro lado, se o sistema estiver muito distante do solo, sofrerá maior influência
do vento, o que também atrapalharia a concentração da precipitação.
O sistema deve aplicar a água a uma mesma altura ao longo de todo o
canteiro. As características da cultura a ser implantada bem como a ação do vento na região
de implantação do sistema são fatores decisivos na hora da escolha da altura de
caminhamento do sistema.
43
3.1.1.2.2 Vazão das agulhas
A uniformidade de vazão das agulhas foi determinada com a mensuração da
vazão de sessenta agulhas na pressão de 50kPa. O tempo de coleta foi de um minuto para
cada repetição. Após as coletas foi calculado o valor médio de vazão e o coeficiente de
variação de fabricação das agulhas segundo a equação: Cvf =
S
, que já foi citada neste
qm
trabalho.
O coeficiente de variação de fabricação das agulhas foi de 2,17%, valor
considerado bom segundo a ABNT (1986) e excelente para Solomon (1979). O valor
médio de vazão das agulhas foi de 4,64Lh-1.
A escolha das agulhas deve ser feita baseado nas necessidades do projeto.
Vazão média, coeficiente de variação de fabricação e relação vazão versus pressão são as
características que devem ser levadas em conta na hora da decisão.
3.1.1.2.3 Relação vazão versus pressão
Utilizando cinco pressões de serviço diferentes (20, 30, 40,50 e 60kPa) foi
coletado simultaneamente o volume individual de 12 pares de agulhas de cada carrinho.
Foram feitos três repetições para cada carrinho cada uma com tempo de um minuto
44
Figura 3.5 – Esquema de coleta dos dados de vazão. Fonte: Dissertação de Mestrado de
Rodrigo Souza.
A relação vazão versus pressão das agulhas foi obtida pelo ajuste da
equação potencial ( q = k.H ) com pares de valores médios de vazão e pressão.
x
Na tabela abaixo se pode observar a soma total da vazão das agulhas nas
pressões de 20, 30, 40, 50 e 60kPa para os três carrinhos.
Pressão
Média (Lh-1)
Carrinho I
Carrinho II
Carrinho III
Vazão (Lh-1)
Vazão (Lh-1)
Vazão (Lh-1)
20kPa
55,8
56,4
49,2
53,8
30kPa
74,4
82,8
73,8
77,0
40kPa
93,0
95,4
94,2
94,2
50kPa
114,6
113,4
112,2
113,4
60kPa
128,4
125,4
126,0
125,4
Tabela 3.3 – Soma total das vazões das agulhas em diversas pressões. Fonte: Dissertação
de Mestrado de Rodrigo Souza.
A relação vazão versus pressão das agulhas foi obtida pelo ajuste da equação
potencial com pares de valores médios de vazão e pressão.
Foi obtida a seguinte expressão por análise:
expressão
q = 5,3834.H0,7749, que vem da
q = k.H x , já citada anteriormente.
45
Figura 3.6 – Gráfico representativo da relação vazão versus pressão das agulhas.
Fonte: Dissertação de Mestrado de Rodrigo Souza.
A presente agulha possui um regime de escoamento instável de acordo com
o valor do expoente ‘x’ da equação potencial. Este valor de x=0,77, próximo de 1, expressa
o quanto a vazão do emissor é sensível à variação de pressão. Isto ocorre porque as agulhas
não possuem nenhum mecanismo de compensação, pois não são equipamentos de uso
específico desta atividade.
3.1.1.3 Automação do sistema
3.1.1.3.1 Comunicação com a porta paralela do computador
46
Os acionamentos das válvulas e dos motores foram feitos via computador,
utilizando a porta paralela.
Figura 3.7 – Vista da comunicação entre computador e meio externo via porta paralela.
Fonte: Dissertação de Mestrado de Rodrigo Souza.
A porta paralela do computador pode ser controlada pelo software Delphi,
que possibilita acesso à porta de comunicação, ou seja, identificação do estado dos pinos
(nível alto ou nível baixo) e controle de seu nível.
A porta paralela é ideal para este trabalho, pois ela trabalha bem em
pequenas distâncias, possui programação relativamente fácil e disponibiliza 8 bits de saída,
5 bits de entrada e outros 4 bits que podem operar como entrada ou saída.
Neste experimento foram utilizados todos os pinos da porta paralela, que
poderão ser vistos nas tabelas 3.4, 3.4 e 3.6. Na figura abaixo está descrita a numeração dos
pinos da porta paralela.
47
Figura 3.8 – Conector DB25 fêmea. Numeração dos pinos da porta paralela do PC.
Fonte: www.recitronic.com.br.
Os sinais são enviados ao endereço 378 através dos bits. Escrever 1 em um
bit resulta em nível alto na saída, ou seja, 5 volts. Através destes 5V pode-se, por exemplo,
enviar sinal para ligar e desligar um relé.
A leitura do endereço 379 reflete o estado dos 5 bits desse registrador. Desta
forma, é possível acessar o estado de um conjunto de chaves externas, neste caso
interruptor magnético.
Os pinos do endereço 37A podem ser utilizados como entrada ou saída. Para
utilizar como saída, basta escrever no endereço 37A os 4 bits disponíveis. Para utilizar
como entrada, deve-se primeiramente fazer a escrita de forma a se ter nível alto (5V) em
todos os 4 pinos de saída, ou seja, nível alto no bit C2 e baixo nos bits C0, C1 e C3, pois a
saída destes três últimos são invertidos.
48
Tabela 3.4 – Função dos pinos do endereço 378 da porta paralela. Fonte: Dissertação de
Mestrado de Rodrigo Souza.
Tabela 3.5 – Função dos pinos do endereço 37A da porta paralela. Fonte: Dissertação de
Mestrado de Rodrigo Souza.
49
Tabela 3.6 – Função dos pinos do endereço 379 da porta paralela. Fonte: Dissertação de
Mestrado de Rodrigo Souza.
3.1.1.3.2 Acionamento das válvulas
Para o controle do fornecimento de água e fertilizante foram utilizadas
válvulas solenóides. Esse tipo de válvula é comumente utilizada em máquinas de lavar
roupa e utiliza a voltagem de 110V.
Figura 3.9 – (a) Válvula para a injeção de água; (b) Válvula para a injeção de fertilizante.
Fonte: Dissertação de Mestrado de Rodrigo Souza.
50
Para acionar essas válvulas via PC, foram utilizados relés, estes por sua vez
funcionam como chaves interruptoras. Para ligar o relé, basta excitar a sua bobina com
12V. Como o computador envia um sinal de 5V, foi utilizado um circuito transistorado
para fornecer os 12V ao relé.
O esquema para acionar o relé via porta paralela do computador pode ser
visto na figura abaixo.
Figura 3.10 – Esquema elétrico para acionamento do relé via porta paralela.
Fonte: Dissertação de Mestrado de Rodrigo Souza.
3.1.1.3.3 Acionamento dos motores
O sistema foi tracionado por um motor de corrente contínua de 12V,
alimentado por bateria.
51
Figura 3.11 – Motor responsável pela movimentação do sistema.
Fonte: Dissertação de Mestrado de Rodrigo Souza.
Para o acionamento dos motores também foram utilizados relés, iguais
àqueles utilizados no acionamento das válvulas.
Para mudar o sentido de movimentação do carrinho basta inverter a
alimentação do motor de 12Vcc para -12Vcc.
Visando inverter o sentido de rotação dos motores, foram construídos três
inversores de polaridade, um para cada motor. A função deste componente é inverter a
polaridade de alimentação, assim invertendo a rotação do motor. Essa é uma solução barata
para o problema da inversão.
Esse inversor de polaridade contém quatro relés, sendo estes acionados via
computador. Quando os relés 3 e 4 estão ligados e os relés 1 e 2 desligados, a polaridade
mantém-se constante, ou seja, positivo na saída do relé 1 e negativo na saída do relé 2.
Quando os relés 1 e 2 estão ligados e os relés 3 e 4 desligados, a polaridade é invertida, ou
seja, negativo na saída do relé 1 e positivo na saída do relé 2.
52
Figura 3.12 – Polarização direta. Fonte: Dissertação de Mestrado de Rodrigo Souza.
Figura 3.13 – Polarização invertida. Fonte: Dissertação de Mestrado de Rodrigo Souza.
53
3.1.1.3.4 Movimentação dos carrinhos
Para a movimentação do carrinho ser controlada via computador o
interruptor magnético foi um importante componente. Este serve para indicar ao programa
o momento em que o carrinho deve inverter o sentido de caminhamento. Esta é a única
parte do sistema que envia dados ao programa. Ocorre o envio de dados ao PC e este
retorna ao sistema a ação a ser tomada. É um controle em malha fechada.
No carrinho foram colocados imãs, quando o imã se aproxima do interruptor
magnético, este fecha um contator mecânico e envia um sinal para o computador. Este sinal
é lido pelo programa e enviado ao inversor de polaridade, para que esse entre em ação
inverta o sentido de rotação do motor. Os interruptores foram fixados em estacas no inicio
e no final de cada canteiro, sendo assim o carrinho fica indo e vindo até que o ciclo
programado termine.
Figura 3.14 – Interruptor magnético instalado na extremidade do canteiro.
Fonte: Dissertação de Mestrado de Rodrigo Souza.
54
3.1.1.3.5 Programa de controle da irrigação
A função do programa é ligar o sistema, realizar o número de passadas
irrigando e injetando fertilizante quando necessário, e desligar o sistema.
Cada canteiro possui um programa que controla suas atividades. O
aplicativo desenvolvido no Delphi, comanda a abertura e o fechamento das válvulas e o
acionamento e inversão do motor.
No programa, o usuário tem a possibilidade de planejar o início da irrigação
no três períodos do dia (manhã, tarde e noite). Além de indicar o início da irrigação, o
usuário informa o número de passadas em que o sistema aplicará água e também as
passadas em que aplicará o fertilizante. O programa também fornece informações sobre as
últimas irrigações.
Figura 3.15 – Entrada de dados para manejo da irrigação.
Fonte: Dissertação de Mestrado de Rodrigo Souza.
55
Figura 3.16 – Informações sobre as últimas irrigações.
Fonte: Dissertação de Mestrado de Rodrigo Souza.
56
O fluxograma utilizado no desenvolvimento do programa pode ser visto na
figura abaixo.
Figura 3.17 – Fluxograma utilizado no desenvolvimento do programa.
Fonte: Dissertação de Mestrado de Rodrigo Souza.
57
3.1.1.4 Viabilização do sistema
As pesquisas que visam obter novas alternativas para substituição de
produtos existentes comercialmente no mercado tentam comprovar a viabilidade desses
novos equipamentos. Portanto, devem ser realizados testes de viabilidade técnica e
econômica.
As agulhas testadas neste experimento apresentam bom desempenho técnico
e baixo custo de aquisição porém, apresentam uma desvantagem em relação aos emissores
disponíveis no mercado. As agulhas são equipamentos pontiagudos que exigem um maior
cuidado durante o manuseio e instalação. Portanto, recomenda-se o uso de agulhas apenas
para áreas experimentais.
Para obter uma melhor caracterização do equipamento, devem-se fornecer
informações sobre as suas limitações. No caso desse equipamento de movimentação linear
cabe, em estudos futuros, realizar testes que indiquem qual a real capacidade do sistema e,
em função do peso do carrinho, peso da mangueira e potência do motor, obter o
comprimento máximo do canteiro e a largura máxima do carrinho. Assim, o sistema estará
irrigando o máximo de área que a capacidade do equipamento permite.
Devem ser feitos, também, testes que verifiquem a durabilidade dos
componentes. Para isso devem ser feitos acompanhamentos do desempenho do sistema,
observando seu funcionamento ao longo do ciclo de uma determinada cultura.
Esse sistema teve um custo relativamente baixo, o que comprova que o
objetivo deste trabalho é viável.
3.1.1.5 Recomendações
Seria interessante também fazer algumas alterações no projeto de forma que
este se tornasse mais independente. Para tal poderia ser instalados sensores de umidade ou
58
de chuva que indicariam a hora do sistema entrar em ação ou quando ele não deveria entrar.
Deveria também ser feita mudança na programação, para que o programa “converse” com
os sensores. Estas recomendações podem ser utilizadas em um futuro trabalho a ser
realizado. Para sistemas de grande porte, este trabalho dá uma boa base, como idéia de
irrigação automatizada.
3.1.1.6 Conclusão
Após o estudo detalhado deste sistema automatizado de irrigação é possível
concluir que é possível fazer uma automação de baixo custo. O sistema de irrigação onde
foi implantado este sistema é uma área experimental e de pequeno porte porem, não há
dúvidas dos benefícios que a automação traz e que o investimento é, não somente
recuperado, como traz economias e benefícios futuros. Se for analisado somente o fator
economia de água, o que não é o único beneficio que a automação traz ao sistema, já podese dizer que a automação é vantajosa e aconselhada para qualquer que seja o sistema de
irrigação.
3.1.2 Estudo da viabilidade econômica para a implantação do sistema de paisagismo
automatizado
Este estudo parte de dados reais de um condomínio ‘x’, que possui 1040
lotes, atualmente conta com 512 lotes ocupados. O estudo da implantação da automação na
59
irrigação parte dos dados do consumo d’água. Sabe-se que a irrigação de áreas verdes
(majoritariamente gramados) é o maior consumidor de água do condomínio.
Sabe-se que cada lote possui uma área de gramado de aproximadamente
200m2, o consumo médio por dia de um gramado é de aproximadamente 2L/m2, com isso
temos um consumo médio de 400L/dia por cada gramado.
Cada aspersor irriga uma área de 20m2 em média, então seriam necessários
dez aspersores por gramado, um aspersor em média possui uma vazão de 0,10L/s, e para
dez aspersores irrigarem 400L/dia tem-se uma média de 40L/dia por aspersor. Tempo
médio necessário por aspersor é de 6’40”.
3.1.2.1 Método de irrigação atual
O método atual de irrigação dos gramados deste condomínio é feitos por
acionamento manual das válvulas. Supondo que um caseiro cuide de um determinado
número de casas e, em seu trajeto, vai abrindo os aspersores, somente após abrir todos e
cuidar de todas as casas é que ele retorna fechando os aspersores. Com isso, dependendo do
número de casas que esse caseiro cuida, o tempo de irrigação pode chegar a duas horas, o
que representa 720 litros por dia por aspersor, sabendo que cada gramado tem uma média
de 10 aspersores temos com isso um total de 7200 litros de água em um dia de irrigação em
um gramado. Sabendo-se que para uma irrigação satisfatória são necessários 400 litros de
água para um gramado de 200m2, temos um desperdício de 6800 litros de água em apenas
um dia de irrigação. Supondo que esse gramado seja irrigado 15 dias ao mês teremos um
desperdício de 102m3/mês.
60
3.1.2.2 Vantagens da automação
Como já foi citado anteriormente com uma irrigação manual tem-se um
desperdício muito grande. A seguir fará-se uma análise financeira, verificando se os valores
justificam a implantação da irrigação automatizada. Não se pode dizer que todos os lotes
desperdiçam 6800 litros d’água em apenas um dia de irrigação, esses valores são
estimativos e adotados como valores médios. Supondo-se que apenas 50% dos lotes, (250
lotes), desperdiçam água, chega-se a um consumo desnecessário de aproximadamente
1700m3/dia, ou 1.700.000litros/dia, ou ainda 25000m³/mês.
Sabendo que o m³ de água custa R$2,00/m³ ter-se-ia um desperdício de
aproximadamente R$200,00/mês/lote, ou ainda, R$2.400,00/ano ou R$ 48.000,00 em 20
anos.
A apresentação destes valores para estes condôminos, com certeza deixará
clara a vantagem da automação.
Tem-se também a vantagem do consumo ótimo de água, o que evita a falta
de água. Com um caseiro é necessário fazer a irrigação em horários comerciais, porém com
um sistema automático, pode-se fazer essa irrigação de madrugada, horário em que o
consumo de água é quase nulo, com isso evita-se a falta de água em horários de pico, e
evita-se até a construção de reservatórios de água para suprir a demanda.
3.1.2.2 Implantação do sistema
Para a implantação deste sistema de automação, pode-se utilizar o
computador pessoal, ferramenta que, com certeza, a grande maioria dos condôminos já
deve possuir, o que já diminuiriam os custos do projeto, visto que não seria necessária a
compra de um controlador, o PC faz esse papel, para isso seria necessário apenas um
software instalado no computador que faça esse papel.
61
Existe uma grande variedade de sensores de chuva e umidade no mercado.
Caberia ao projetista a escolha destes, porém para este projeto não é necessário sensor de
alta precisão e com calibração precisa. Pode ser sensores de baixo custo que atendam às
necessidades do projeto.
Os atuadores deste projeto serão apenas válvulas solenóides, visto que os
aspersores já estão instalados. Como foi visto no estudo de caso anterior, a parte cara da
automação daquele sistema foram os motores. Como neste sistema os atuadores serão
somente as solenóides, a parte mais cara do projeto serão os sensores.
Como este sistema já esta pronto, um grande problema na hora da
implantação da automação seria o cabeamento. Seria necessário ‘cortar o chão’ para a
passagem de fios e cabos, isso aumentaria muito o custo da automação. Uma solução para
esse problema seria a implantação de sistemas wire-less, que são sistemas sem fio. Muitos
sensores no mercado já têm comunicação via wire-less com os controladores, assim
também como os atuadores.
3.1.2.3 Conclusão
A automação proposta é viável economicamente, ecologicamente e, suporta
qualquer análise que se pretenda, inclusive projetar este produto de forma a disponibilizá-lo
para o mercado consumidor. Trata-se de uma análise prévia e que indica a potencialidade
do tema que ora se conclui.
62
3.1.2.4 Recomendações
Aprofundar estudos e análise quantitativa que comprove e ajuste números e
valores estimativos adotados para esta análise prévia. Fica a sugestão para futuros trabalhos
sobre irrigação predial, a inovação nos produtos de irrigação atualmente no mercado e a
concepção de sistemas de irrigação de baixo custo, tornando viável a irrigação
automatizada para várias classes.
63
4 Considerações Finais
Em qualquer trabalho de automação o fator econômico pode marcar o limite
da sofisticação a atingir. Paralelamente, podem ocorrer gastos inadequados. A introdução
de sistemas de irrigação automatizados visa à redução de custos, redução de mão-de-obra,
aumento da qualidade do produto e maior produção e sensível redução do consumo, devido
ao uso eficiente e racional de água. Sendo assim, qualquer sistema de irrigação pode ser
automatizado.
Essa automação possui diferentes níveis de sofisticação. Por exemplo, em
um sistema de irrigação predial, os fatores aumento da qualidade e maior produção não
fazem nenhum sentido, portanto esforços de projeto para alcançar esses objetivos são
desnecessários em irrigação predial.
Levando em considerações os fatores relevantes para o sistema o qual se
está projetando é possível chegar a uma irrigação automatizada ótima. Essa irrigação ótima
é aquela que após vários estudos e acompanhamento de áreas experimentais, pode-se
alcançar.
64
REFERÊNCIAS BIBLIOGRÁFICAS
BRAGA, N.C. Curso básico de eletrônica. São Paulo: Editora Saber, 1999.v.1 140p.
CASTRUCCI, P.B.L. Controle automático: teoria e projeto. São Paulo: EDUSP, 1969.
280p.
BOYLESTAD, R.; NASHELSKY, L. Dispositivos Eletrônicos e Teoria de Circuitos. 5ª.
Edição. Rio de Janeiro: Editora: Prentice-Hall do Brasil, 1994.
GORNAT, B.; SILVA, W.L.V. Sistemas de controle e automatização da irrigação. ITEM.
Irrigação e Tecnologia Moderna, n.41, p.20-24, 1990.
SOARES, M.J. Irrigador de jardim microcontrolado. Eletrônica Total, n.94, p.9-15, 2003.
VILELA, E.D.D. Acesso a porta paralela do PC. Saber Eletrônica, n.319, p.42-43, 1999.
CARVALHO, D.F.; SILVA, W.A.; MÉDICE, L.O.; PEREIRA, M.G. Avaliação de um
sistema automático de baixo custo para manejo da irrigação. In: CONGRESSO
BRASILEIRO DE ENGENHARIA AGRÍCOLA, 30., Foz do Iguaçu, 2001. Anais. Foz do
Iguaçu: SBEA, 2001.
FUNDAÇÃO INSTITUTO BRASILEIRO DE GEOGRAFIA E ESTATÍSTICA.
Contagem da população. Rio de Janeiro: IBGE, 1996.
OLITTA, A.F.L. Os Métodos de Irrigação. 1ª Edição. São Paulo: Editora Nobel, 1983.
267p.
65
KELLER, J.; KARMELI, D. Trickle irrigation design parameters. Transactions of the
ASAE, v.17, n.2, p.678-684, July/Aug. 1974.
SOLOMON, K.H. Manufacturing variation of trickle emitters. Transactions of the ASAE,
v.22, n.5, p.1034-1038, Sept./Oct. 1979.
VIEIRA, A.T. Caracterização hidráulica de um tubo gotejador. Piracicaba, 1996. 56p.
Dissertação (Mestrado) – Escola Superior de Agricultura “Luiz de Queiroz”, Universidade
de São Paulo.
BOTREL, T.A. Hidráulica de microaspersores e de linhas laterais para irrigação localizada.
Piracicaba, 1984. 78p. Dissertação (Mestrado) – Escola Superior de Agricultura “Luiz de
Queiroz”, Universidade de São Paulo.
SOUZA, R.O.R.M. Desenvolvimento e avaliação de um sistema de irrigação automatizado
para áreas experimentais. Piracicaba, 2001. 83p. Dissertação (Mestrado) – Escola Superior
de Agricultura “Luiz de Queiroz”, Universidade de São Paulo.
FOUCAUT, M. As palavras e as Coisas: uma arqueologia das ciências humanas. São
Paulo: Martins Fontes, 1990.
RIBEIRO, L. B. A Incorporação do Conceito de Sistema na Ciência da Informação, 1993.
Tese de Mestrado, UFRJ.
MORIN, E. O Método: a natureza da natureza: Lisboa: Publicações Europa-América, 1981.
CASTRO, V. G. “Teoría y Práctica de los Medios de Enseñanza” – Editorial pueblo e
Educación, C. de La Habana, 1986.
LYOTARD, Jean-François. O pós-moderno. Rio de Janeiro: José Olimpio, 1993.
66
BOUDON, R.; BOURRICAUD, F. Diccionario Crítico de Sociología. São Paulo: Ática,
1993.
APPLE, M. Ideología e Controle. São Paulo: Brasiliense. 1992.
PIZZA JUNIOR, W. Considerações sobre a teoria geral de Sistemas. Revista de
administração Pública. Rio de Janeiro: v.20, n.2, p.71-89, abr./jun. 1986.
www.carrerirrigacao.com.br, acesso em maio 2005.
www.recitronic.com.br, acesso em maio 2005.
www.irricom.com.br, acesso em maio 2005.
www.portaparalela.hpg.ig.com.br, acesso em maio 2005.
www.rogercom.com, acesso em maio 2005.
www.eletricazine.hpg.ig.com.br, acesso em maio 2005.
www.mrshp.hpg.ig.com.br, acesso em maio 2005.
www.dexter.com.br, acesso em maio 2005.
www.etec.com.br, acesso em maio 2005.
http://agrosystem.locaweb.com.br, acesso em junho 2005.
http://content.honeywell.com, acesso em junho 2005.
67
www.junquer.com.br, acesso em junho 2005.
www.netafim.com.br, acesso em junho 2005.
www.paisagismobrasil.com.br, acesso em junho 2005.
www.agr.feis.unesp.br, acesso em junho 2005.
www.aguar.com.br, acesso em julho 2005.
www.anponline.org.br, acesso em julho 2005.
www.conaut.com.br, acesso em julho 2005.
www.rainbird.com.br, acesso em julho 2005.
www.stihl.com.br, acesso em julho 2005.
www.wri.org, acesso em julho 2005.
68
Download