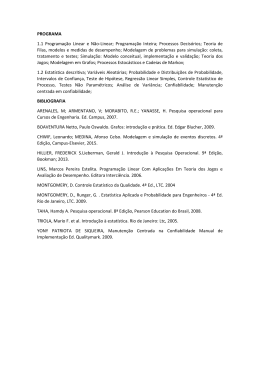
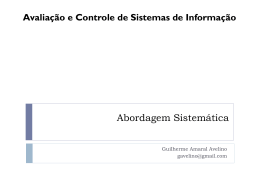
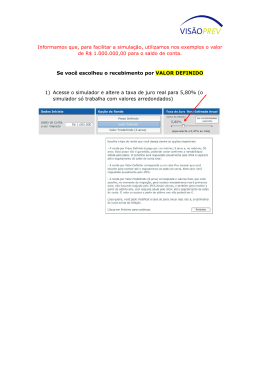
XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. AVALIAÇÃO DE TECNOLOGIAS DE CAPTURA DE MOVIMENTOS PARA APLICAÇÃO EM PROJETOS DE SITUAÇÕES PRODUTIVAS Luiz Antonio Tonin (UFSCar) [email protected] William Rodrigues dos Santos (UFSCar) [email protected] Rodolfo Liang Wu (UFSCar) [email protected] Daniel Braatz (UFSCar) [email protected] Nilton Luiz Menegon (UFSCar) [email protected] Os conhecimentos do campo da ergonomia são utilizados para auxiliar a compreensão das interações entre os humanos e outros elementos de um sistema de produção, abordando a tecnologia de interface entre a organização, a máquina, o ambiente e o ser humano. Neste contexto, este artigo introduz os potenciais benefícios do uso integrado de ferramentas computacionais de simulação humana e apresenta uma análise comparativa de sistemas de captura de movimentos visando sua integração com ferramentas de modelagem e simulação humana, para aplicações em projetos de situações produtivas. Foram selecionados seis sistemas de captura, que utilizam diferentes tecnologias de rastreamento dos movimentos, comparando-os quanto: à existência de integração com software de modelagem e simulação humana, liberdade de movimentos e flexibilidade do ambiente de uso. Os resultados mostram a possibilidade de utilização de dois sistemas de captura, Moven e iPi DMC, com diferentes técnicas e procedimento para realizar a integração com três softwares de simulação humana: Jack, Ramsis e Human Builder. As conclusões apontam para possibilidade de utilizar este ferramental em processos de projetos, aumentando a qualidade e redução do tempo na criação de análises, especialmente em situações dinâmicas. Porém, permanecem alguns problemas técnicos, como correspondência antropométrica entre o corpo de captura e o manequim virtual, o posicionamento dos marcadores e as necessidades de calibração, que podem gerar desvios na representação do movimento em ambiente virtual. Palavras-chave: projeto de situações produtivas; simulação humana digital; captura de movimentos. XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. 1. Introdução Este artigo apresenta uma introdução aos potenciais benefícios do uso conjunto de ferramentas computacionais de simulação humana e captura de movimentos no contexto dos projetos de ergonomia, seja no contexto do desenvolvimento de novos produtos ou no contexto do desenvolvimento de situações produtivas. Nos últimos anos o uso de tecnologias computacionais aplicadas ao projeto tem sido cada vez mais comum; no campo da inovação tecnológica este assunto foi absorvido de forma bastante consolidada, em especial no que tange aos aspectos técnicos como a modelagem por sistemas CAD (Computer Aided Design) e CAE (Computer Aided Engineering) como demonstrado por Sales, Nobre Filho e Santos (2013). Outro tipo de aplicação consolidada é o uso de softwares de modelagem com foco em otimização e monitoramento do desempenho da indústria, tal como abordado em Silva, Alencar e Danielski (2013). Por outro lado, a utilização destas técnicas e suas derivações não são tão difundidas no contexto do projeto de postos de trabalho, em particular na modelagem dos aspectos ergonômicos do trabalho. Para Béguin (2007) as possibilidades de adaptação dos postos de trabalho ou produtos às necessidades humanas, seja em termos dos instrumentos e do ferramental ou em termos organizacionais, são maiores nas fases iniciais de concepção, todavia, o conhecimento acerca de tais situações é crescente na medida em que o projeto vai se desenvolvendo, neste sentido, a possibilidade de agir e o conhecimento sobre a situação particular são inversamente proporcionais. Além destas variáveis, o custo da intervenção (custo de mudança) é crescente ao longo do projeto (PMBOK, 2004), neste sentido a necessidade de incluir desde o início dos processos de projeto os conceitos de ergonomia e o conhecimento das particularidades dos processos, os quais a abordagem da ergonomia centrada na atividade visa elucidar, é ainda mais evidente. A Figura 1 ilustra a temporalidade das situações de projeto. Graficamente são ilustradas as variáveis tempo, conhecimento sobre a situação futura, possibilidades de agir e custo de mudanças, sendo possível confirmar a importância da inclusão de qualquer requisito de projeto, em especial de requisitos relacionados à ergonomia nas fases precoces do processo de projeto. 2 XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. Figura 1- A temporalidade das situações de projeto Fonte: Adaptado de Béguin (2007) e PMBOK (2004) As aplicações de modelagem e simulação de manequins digitais objetivam facilitar processos de projetos industriais, acelerando seu desenvolvimento e eficiência e ainda suportar as interações, integrar e analisar os aspectos de ergonomia possíveis de estarem presentes na atividade futura de trabalho, em fases iniciais da concepção (MAGISTRIS et al., 2013; KANG et al., 2012). 2. Ferramentas computacionais aplicadas em projetos de situações produtivas No campo de projetos de produtos e situações produtivas, diversas técnicas foram desenvolvidas, particularmente no final do século XX. Podem ser destacados um conjunto de ferramentas computacionais de modelagem e simulação humana e os sistemas de captura de movimentos, destacadas na Figura 2. Nos últimos anos estas técnicas se desenvolveram ainda mais, viabilizando sua difusão em diversas organizações em muitos países. Em especial, atribui-se a estas ferramentas uma contribuição essencial para que os processos de projeto se tornem cada vez mais rápidos e mais precisos, diminuindo a necessidade de protótipos físicos, contribuindo dessa forma com 3 XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. redução de custos e tempo para o desenvolvimento, com produtos mais adequados para os usuários. Figura 2 - Ferramentas computacionais de simulação humana e captura de movimentos Na perspectiva de Guimarães (2012), a simulação virtual 3D auxilia na validação do projeto, minimizando erros e conflitos entre usuários e projetistas. Estas técnicas (devido a maior interface gráfica e visual) dão a possibilidade de negociação, mudanças e criação para atores que não tenham formação em projeto, auxiliando na obtenção de melhores resultados. 2.1. Simulação humana computacional As ferramentas de modelagem e simulação humana podem contribuir tanto para questões técnicas, como a representação das características humanas (antropometria e biomecânica, por exemplo), quanto para interações sociais no processo de projeto, com a capacidade de representar e prognosticar situações futuras em diferentes cenários em fase de desenvolvimento. De forma pragmática as ferramentas de modelagem e simulação humana podem ser categorizadas em modelagem cognitiva e modelagem física, conforme a Figura 3. A modelagem cognitiva fundamenta-se na reprodução de modelos relacionados com aspectos de memória, raciocínio e tomada de decisão pelo homem. Já a modelagem física está preocupada em representar os aspectos físicos e funções biomecânicas. Nesta categoria a modelagem física pode ser classificada em três modelos: modelos biomecânicos, manequins digitais (SUNDIN e ÖRTENGREN, 2006) e modelos de visualização (MENEGON, BRAATZ e TONIN, 2011). 4 XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. Figura 3: Divisão proposta para simulação humana computacional Fonte: Menegon, Braatz e Tonin (2011) Para Ziolek e Kruithof Jr. (2000), o processo de modelagem e simulação humana ocorre com a interação dos manequins digitais em ambientes modelados. As construções dos manequins seguem os modelos apresentados na Figura 3. Já o ambiente é caracterizado pela modelagem dos objetos, artefatos (cenário) em ferramentas CAD. A interação ocorre das análises (espaços, campo de visão, postura, força e outras) dos manequins com os cenários. É importante destacar que as ferramentas de modelagem e simulação humana que possuem esses elementos (manequins, CAD e análises) são as mais relevantes para projetos de situações produtivas pela abordagem da ergonomia. Braatz, Volpe e Tonin (2010) confirmam a perspectiva apresentada com uma pesquisa nos artigos publicados em periódicos internacionais (International Journal of Industrial Ergonomics; Applied Ergonomics; Computers in Industry; e Computers and Graphics) e nos anais dos congressos da IEA – International Ergonomics Association, entre os anos de 2000 a 2009. Os autores concluíram que as principais ferramentas encontradas no mercado e objeto de pesquisas são relacionadas ao uso dos sistemas computacionais Ramsis, Jack e o Human Builder. 5 XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. Porém, a utilização de manequins digitais em processos de projeto possui um conjunto de dificuldades e limitações. Schaefers et al. (2011) apresentam que entre as razões para a baixa utilização desta tecnologia entre os projetistas destaca-se a lacuna de dados antropométricos atualizados, que interfere significativamente na qualidade dos modelos construídos. Outras limitações em relação à aplicação destas tecnologias foram identificadas por Magistris et al. (2013) e referem-se basicamente às aproximações biomecânicas, cálculos estáticos e outras características relacionadas à própria constituição da tecnologia em termos de suas restrições computacionais. Do ponto de vista operacional, a principal dificuldade encontrada no processo de simulação humana é o posicionamento e a movimentação do manequim utilizando mouse e teclado, isto é citado por diversos autores, como Sundin e Örtengren (2006). Além disso, as posturas e movimentos construídos pelos projetistas (usuários dos softwares de modelagem e simulação humana) possuem lógica idealizada de como os movimentos são realizados pelos operadores, porém, na realidade, estes movimentos dependem das condições ambientais ou situacionais durante a realização de uma atividade (ZÜLCH, 2012). A utilização da tecnologia de Captura de Movimentos (ou Motion Capture - MoCap) é uma alternativa para lidar com as dificuldades e limitações da simulação humana computacional pelo método tradicional (mouse e teclado). Os sistemas de Captura de Movimentos (ou Motion Tracking) são o conjunto de hardware e software utilizados para registrar o movimento humano real em um ambiente digital com finalidades diversas, desde filmes e jogos até simulações de emergências e projetos de diferentes produtos e postos de trabalho. A tecnologia permite gravar os movimentos humanos em ambiente virtual e posteriormente controlar e reproduzir nos manequins digitais (SUNDIN e ÖRTENGREN, 2006). Segundo estimativas de uma empresa desenvolvedora de sistemas de MoCap são necessários cerca de 2 dias de trabalho para que sejam produzidos cerca de 3 minutos de animação quando são utilizados os dispositivos tradicionais de entrada: mouse e teclado (Haption, 2011). Quando utilizados os sistemas de MoCap estas animações são supostamente produzidas em tempo real (sem trabalho posterior). O Quadro 1 mostra uma comparação entre o método de simulação tradicional e o uso de sistemas de MoCap. 6 XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. Quadro 1: Comparação entre os métodos utilizados em conjunto com ferramentas de simulação humana Método Tradicional (teclado e mouse) Captura de Movimentos Tempo Elevado tempo requerido para construção de posturas e, especialmente, de ações. Construção rápida de posturas e ações. Precisão Alto controle da precisão, especialmente na construção de posturas. Baixo controle da precisão. Posturas A postura construída pode não ser representativa, uma vez resultante de abstrações do projetista. Aquisição da postura real adotada durante a ação, especialmente em momentos críticos. Fonte: Adaptado de Ramón, Candelas e Medina (2007) O Quadro 1 evidencia a potencialidade do uso da tecnologia de MoCap na simulação de manequins digitais. O baixo controle na construção de posturas é justificado pelo realismo atribuído pela postura capturada. 3. Principais tecnologias de captura de movimentos Buscando uma solução prática para os problemas e limitações no uso dos softwares de modelagem e simulação de manequins digitais, foi realizado um levantamento bibliográfico acerca de sistemas de capturas de movimentos pelos autores deste texto, com o objetivo de identificar quais sistemas de MoCap poderiam ser adquiridos para projetos de situações produtivas e de novos produtos, especialmente aplicáveis no contexto da indústria aeronáutica. Primeiramente foram pesquisadas as tecnologias utilizadas nos sistemas de MoCap. Em seguida foi selecionado um sistema MoCap comercial referente a cada tecnologia e avaliou-se a possibilidade de uso conforme critérios para utilização em projetos de situações produtivas. Por fim, foram selecionados dois sistemas para testar a integração com os principais softwares de manequins digitais. A tecnologia utilizada em sistemas de MoCap está relacionada com os sensores utilizados, que pode ser dividido em cinco categorias, conforme apresentado na Figura 4, sendo: (a) inerciais, (b) mecânicos, (c) óticos, (d) magnéticos, e “markerless” (sem marcadores). 7 XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. Figura 4: Tipos de Sistemas MoCap Cada tecnologia possui princípios de funcionamento específicos para rastrear a posição e movimentação dos marcadores. O Quadro 2 apresenta o princípio de funcionamento de cada tecnologia e uma reflexão teórica sobre as vantagens e inconvenientes de cada uma, este quadro apresenta uma complementação dos estudos realizados por Ramón, Candelas e Medina (2007), como forma de atualizar o quadro comparativo foi acrescentada a tecnologia “markerless”. Quadro 2 – Vantagens e inconvenientes das tecnologias de Sistemas de MoCap Tecnologia Funcionamento Vantagens Mecânica Variação de voltagem de potenciômetros em estrutura mecânica • Robustez • Precisão • Latência baixa Magnética Variação de campo magnético medido em receptores • Medidas absolutas precisas • Sem oclusão • Precisão • Sem oclusão • Sensores pequenos Desvantagens • Incômodo para o corpo de captura • Medidas relativas • Erros devido a distorção magnética • Medidas relativas • Acúmulo de erros Inercial Integração da velocidade angular de giroscópios Óptica Triangulação de marcadores em imagens capturadas por câmeras • Medidas absolutas precisas • Oclusões • Infraestrutura complexa • Necessidade de calibração "Markerless" Rastreamento da silhueta do corpo de captura • Sem marcadores • Trajes casuais • Baixa precisão • Tecnologia pouco apropriada Fonte: Adaptado de Ramón, Candelas e Medina (2007) O Quadro 2 indica que a escolha da tecnologia do sistema MoCap deve ser realizada conforme o objetivo de aplicação do sistema. Considerando-se aplicações para projetos, contextualizados pela ergonomia, foram selecionados sistemas de MoCap encontrados no 8 XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. mercado e ainda, foram estabelecidos quatro critérios (descritos a seguir) para análise dos sistemas de MoCap: Interação com software de simulação humana: esta interação pode ser direta, possibilitando visualização em tempo real (integração), ou necessidade de desenvolvimento de plugins para exportação e importação de arquivos de captura; Liberdade de movimentos: este critério refere-se ao aparato (roupa e marcadores) que deve ser utilizado pelo ator (corpo de captura) para obter os movimentos. Desta forma, foram avaliadas quais as restrições impostas pelo aparato para o ator realizar movimentos; Flexibilidade no ambiente de uso: a flexibilidade refere-se à possibilidade de realizar a captura dos movimentos em ambientes diversos: fora do laboratório e nos diferentes locais de trabalho, que possuem uma série de características, como por exemplo: alta ou baixa luminosidade, alta ou baixa temperatura, ruído, objetos metálicos, locais pequenos com falta de espaço para posicionamento de cabos, entre outros; Custo: os sistemas de MoCap possuem diferenças significativas de custo, dependendo da sofisticação das tecnologias utilizadas, tanto em hardware, como em software. A síntese da análise é apresentada no Quadro 3. Quadro 3 – Síntese comparativa entre sistemas de MoCap comerciais Tecnologia Ótico Magnético Mecânico Inercial Markerless Markerless Sistema OptiTrack MotionStar Wireless Gyspy Moven BioStage iPi DMC Integração com software de simulação humana Interação direta com software JACK Não possui interação direta Não possui interação direta Interação direta com softwares: JACK, CATIA e DELMIA Não possui interação direta Não possui interação direta Liberdade de movimentos Não há restrições Restrições devido ao uso traje, com fios Restrições devido ao uso do exoesqueleto Não há restrições Não há restrições Flexibilidade no ambiente de uso Restrições para ambientes externos Restrições devido a presença de materiais ferromagnéticos Não há restrições Não há restrições Não há restrições Leves restrições devido ao traje com marcadores Restrições para ambientes com a presença de materiais ferromagnéticos muito intensos 9 XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. O objetivo fundamental desta síntese é apresentar os sistemas de captura de movimentos e classificar suas restrições em função dos requisitos estabelecidos, os quais são aplicáveis em projetos de situações produtivas e de novos produtos. Assim, foram selecionados dois destes sistemas e após a aquisição destes pôde-se realizar alguns experimentos, que serão detalhados adiante. O grupo de pesquisa optou por testar um sistema markerless pelo baixo custo de aquisição e um sistema inercial, devido à liberdade de movimentos e interação com software de simulação humana. Foram realizados diversos testes com o sistema markerless iPi DMC, variando-se diversos parâmetros, em especial: “Plano de fundo”, “Mobiliário de fundo e contraste”, “Roupas e contraste” e “Oclusão”. Estes parâmetros foram indicados pelo fabricante como importantes para o desempenho do sistema. Os resultados não atenderam aos requisitos do grupo de pesquisas, o sistema apresentou perda de trajetórias em todos os ensaios. Os testes do sistema inercial ocorreram dentro de um avião real (por este ser ao mesmo tempo o produto foco do grupo de pesquisas e ainda um espaço de trabalho com várias estações e processos) e foram realizados em diversas situações de um voo, entre elas o acesso à poltrona e até mesmo o uso (simulado) do banheiro do avião. Também foi possível testar o sistema em atividades de montagem da aeronave. Em todas as situações o sistema atendeu satisfatoriamente às expectativas. Com as capturas realizadas foram realizados testes e procedimentos para possibilitar a utilização dos arquivos capturados nos softwares de simulação humana. 4. Análise dos resultados Os resultados mostram que os softwares JACK/SIEMENS e o Human Builder/DASSAULT (presente no CATIA ou no DELMIA) apresentam integração com sistema de MoCap inercial, a síntese dos resultados é apresentada no Quadro 4. Os dados de captura são aceitos nos softwares diretamente (por meio de plugins específicos), sem a necessidade de realizar procedimentos de exportação/importação. Nos testes realizados foi efetuada integração em tempo real somente com o Human Builder presente no DELMIA. 10 XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. SISTEMAS DE CAPTURA DE MOVIMENTOS Quadro 4 - Integração entre sistemas de MoCap e softwares de simulação humana QUALIDADE DOS MOVIMENTOS CAPTURADOS SOFTWARES DE SIMULAÇÃO HUMANA JACK RAMSIS Human Builder DELMIA Foi necessário procedimentos de exportação/importação Possui plugin para integração, que foi testado e funcionou em conformidade. Foi necessário procedimentos de exportação/importação Não possui plugin e não permite importar arquivos de captura Moven Satisfatória Possui plugin para integração, desenvolvido em parceria pelos fornecedores das tecnologias. iPi DMC Insatisfatória (perda de trajetórias) Foram necessários procedimentos de exportação/importação O RAMSIS não possui plug-in para abertura de arquivos de captura de movimentos, necessitando de uma série de procedimentos (exportação/importação) para possibilitar a abertura das capturas. Além disso, o próprio software é limitado quanto ao tamanho dos arquivos, não aceitando capturas com mais de 500 frames. Considerando o limite inferior de geração de capturas do Moven de 12fps (frames por segundo), o tempo máximo de uma captura, aceita pelo software, é aproximadamente 42 segundos. Esta limitação impede o software de ser amplamente utilizado para projeto de situações produtivas. O sistema de captura iPi DMC não apresentou integração com nenhum software de simulação humana, necessitando de procedimento de exportação/importação para utilizar os dados capturados. Por fim, destaca-se que o JACK e o RAMSIS (apesar das limitações) aceitam arquivos de captura de maneira isolada (sem plug-in), enquanto que o CATIA e o DELMIA necessitam de desenvolvimento específico, tornando-os incompatíveis com sistemas outros sistemas de MoCap. 5. Conclusões Os sistemas de captura de movimento quando aplicados juntamente às ferramentas de simulação humana, contribuem significativamente para o projeto em ergonomia. Além do uso em tempo real da captura, os movimentos gravados podem servir como base para a construção de bibliotecas de ações que podem ser resgatadas quando necessário, formando grandes sequências de atividades laborais (JOHANSSON e ASTRÖM, 2004). Os sistemas de MoCap 11 XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. podem melhorar a fidelidade da representação da ação real, propiciando um salto de qualidade das análises dinâmicas realizadas. Isso tudo permite uma melhoria significativa na etapa de prototipagem virtual, que reduz custos significativos no processo de projeto e potencialmente auxilia na redução do tempo de projeto, que é um objetivo importante no contexto atual. Como conclusão pode-se dizer que a integração entre os sistemas de MoCap aos softwares de simulação humana, juntamente com o uso integrado destas tecnologias em projetos de ergonomia ainda não é uma questão equacionada, apesar de muitas vezes prometida pelos fornecedores. Na maioria dos estudos realizados ao longo deste trabalho foi possível notar que há ainda barreiras tecnológicas para aplicações integradas. Pode-se verificar a existência de soluções particulares, tais como plug-ins e conjuntos de exportações/importações entre os sistemas, todavia tais soluções nem sempre funcionam bem e em geral acarretam na redução do potencial de uso das técnicas aplicadas de forma integrada. Entretanto, mesmo com a integração, novas dificuldades surgem com o uso desses sistemas, como dificuldades relativas à correspondência antropométrica entre o corpo de captura e o manequim virtual, o posicionamento dos marcadores e as necessidades de calibração que em geral podem gerar desvios na representação do movimento em ambiente virtual. Referências BÉGUIN, Pascal. O ergonomista, ator da concepção. In: FALZON, Pierre. (editor): Ergonomia. São Paulo: Edgard Blucher, 2007. BRAATZ, Daniel; VOLPE, Lucas; TONIN, Luiz. Análise comparativa de ferramentas computacionais de modelagem e simulação humana para aplicação em projetos de situações produtivas. In: ENEGEP, 30, 2010, São Carlos, São Paulo, Brasil. Anais... São Carlos, ENEGEP, 2010. CD ROM. GUIMARÃES, C.; CID, G.; PARANHOS, A.; FRANCA G.; SANTOS, V.; ZAMBERLAN, M.; STREIT, P.; OLIVEIRA, J.; CORREA, G. Ergonomic Work Analysis Applied to Chemical Laboratories on an Oil and Gas Research Center. In: Duffy, Vicent (editor): Advances in Applied Human Modeling and Simulation. Boca Raton: CRC Press Taylor & Francis Group, 2012. (Advances in Human Factors and Ergonomics Series). HAPTION. Real-Time Interaction for Delmia Human (RTID Human): A tutorial (2011). JOHANSSON, Anna; ASTRÖM, Lina. How to use computer manikins and motion capture. 2004. 196p. Master (Master of Science Programme) – Lulea University of Technology – Department of Human Work Science, Sweden, 2004. KANG, Bora; LEE, Donghun; CHUNG, Min K; KYUNG, Gyounhyung; NAM, Kyunghyun. A Method to Create Dynamic Motions of Digital Human Models and a Case Study. In: Proceedings of the Human Factors and Ergonomics Society, 56, 2012, Boston. Proceedings… Boston: SAGE, 2012. p. 2542-2546. MAGISTRIS, G.; MICAELLI, A.; EVRARD, P.; ANDRIOT, C.; SAVIN, J.; GAUDEZ, C.; MARSOT, J. Dynamic control of DHM for ergonomic assessments. International Journal of Industrial Ergonomics, v. 43, p. 170-180, 2013. MENEGON, Nilton Luiz; BRAATZ, Daniel; TONIN, Luiz. Simulação Humana. In: MÁSCULO, F. e VIDAL, M. (Orgs.). Ergonomia: trabalho adequado e eficiente. Rio de Janeiro: Elsevier/ABEPRO, 2011. 12 XXXV ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO Perspectivas Globais para a Engenharia de Produção Fortaleza, CE, Brasil, 13 a 16 de outubro de 2015. PMBOK. Project Management Body of Knowledge. PROJECT MANAGEMENT INSTITUTE – PMI: A guide to the project management body of knowledge, Maryland, 2004. RAMÓN, Juan Antonio Ramón; CANDELAS, Francisco Andrés Herías; MEDINA, Fernando Torres. Captura de Movimento y Localización en Interiores Aplicadas a Entornos Industriales. In: Jornadas de Automática, 28., 2007. Jornada. Huelva: Comité Español de Automática, 2007. p. 331-339. SCHAEFERS, D.H.; RUITER, I.A.; SONG, Y.; MOLENBROEK, J.F.M. Requirements for an industrial designer-oriented DHM. In Proceedings of the First International Symposium on Digital Human Modeling. 2011, Lyon, France. SALES, Jorge Henrique; NOBRE FILHO, George W. L.; SANTOS, Everton Costa. Utilização de software CAD e CAE no desenvolvimento de produto sustentável para aquecimento de água. GEINTEC, São Cristóvão, v. 3, n.5, p. 168-179, 2013. SILVA, Iury Souza; ALENCAR, João Rui Barbosa; DANIELSKI, Leandro. Utilização de software para simulação de processos: uma aplicação nas unidades de tratamento de águas ácidas de refinaria. GEINTEC, São Cristóvão, v. 3, n. 5, p. 190-192, 2013. SUNDIN, Anders; ÖRTENGREN, Roland. Digital human modeling for CAE applications. In: SALVENDY, G. (Ed.). Handbook of human factors and ergonomics. New Jersey: John Wiley & Sons, Inc, 2006. p. 10531078. ZIOLEK, Scott . A; KRUITHOF JR., Pieter, C. Human modeling & simulation: a primer for practioners. In: HFES, 44., 2000. Proceedings. San Diego: HFES, 2000. p. 825-827. ZÜLCH, Gert. Features and limitations of digital human models – a new German guideline. In: IEA, 41, 2012, Recife. IOS Press. Recife: IEA, 2012 13
Download