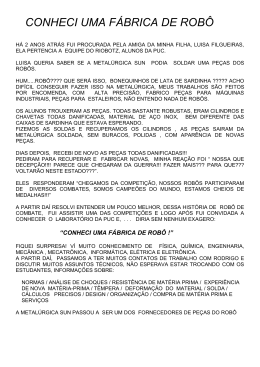
ABASTECIMENTO DE ESTOQUE POR ROBÔ MICROCONTROLADO Anhanguera Educacional S.A. Correspondência/Contato Alameda Maria Tereza, 2000 Valinhos, São Paulo - 13.278-181 [email protected] [email protected] Coordenação Instituto de Pesquisas Aplicadas e Desenvolvimento Educacional - IPADE Publicação: 09 de março de 2009 ANUÁRIO DA PRODUÇÃO DE INICIAÇÃO CIENTÍFICA DISCENTE Vol. XI, Nº. 12, Ano 2008 Luciano dos Santos Magalhães Profa. Ms. Janaine Cristiane de Souza Arantes (Orientadora) Prof. Esp. Ivair Teixeira (Co-Orientador) Ciência da Computação FACULDADE ANHANGUERA DE VALINHOS ANHANGUERA EDUCACIONAL S.A. Trabalho apresentado no 8º. Congresso Nacional de Iniciação Científica – CONIC – SEMESP em novembro de 2008. Trabalho premiado com o 3º. lugar na área de Ciências Exatas, da Terra e Engenharias no 2º. Seminário da Produção Docente e Discente da Anhanguera Educacional em dezembro de 2008. RESUMO Este trabalho apresenta um exemplo de automação de abastecimento de estoque por robô com capacidade para tomar decisões, de acordo com informações do ambiente, e executar tarefas antes realizadas pelo homem. Seu objetivo consiste na elaboração de um protótipo de robô, denominado carrinho autônomo, com a utilização de um microcontrolador PIC16F628A, que é um componente de baixo custo, fácil aquisição e ampla literatura. Sua construção ocorre com componentes reciclados, principalmente obtidos de sucatas tecnológicas, e revela um projeto base para possível expansão e utilização em soluções comerciais. Como resultado, tem-se um protótipo motorizado capaz de movimentar-se e armazenar itens em um almoxarifado, de acordo com instruções pré-programadas em um firmware específico, desenvolvido em linguagem Assembly para microcontroladores. O robô percorre uma maquete que simula os compartimentos de um almoxarifado e a informação para a localização do produto a ser entregue é obtida a partir de um leitor comercial de código de barras. Palavras-Chave: Microcontrolador PIC, robô microcontrolado, automatização de almoxarifado. Trabalho realizado com o incentivo e fomento da Anhanguera Educacional S.A. 696 Abastecimento de estoque por robô microcontrolado 1. INTRODUÇÃO A automação industrial (NATALE, 2005) é uma área de extrema relevância e tema de diversos projetos de pesquisa. Cada vez mais é explorada a capacidade das máquinas de executar tarefas previamente realizadas pelo homem e de controlar sequências de operações sem a intervenção humana. O uso de dispositivos programáveis para controle autônomo de processos e máquinas, como por exemplo, microcontroladores (PEREIRA, 2002; SOUZA, 2003; SOUZA, 2005), é um passo além da mecanização, na qual as máquinas são utilizadas apenas para auxiliar nas tarefas humanas. Atualmente, existem várias aplicações elaboradas com microcontroladores, tais como: Sistema de Controle Digital - SMALLOGIC (PEREIRA et al., 2007), que simula uma automação industrial com várias placas microcontroladas interligadas em uma rede mestre-escravo; Frequencímetro Digital com a Utilização de Microcontrolador PIC (TEIXEIRA; ARANTES; MACEDO, 2007), que mostra a construção de um frequencímetro de baixo custo, portátil e consumo irrisório; Central de Alarme Residencial Home Security (TEIXEIRA; COSTA; PIRES, 2005), que utiliza o microcontrolador para gerenciar a segurança em uma residência. Nessa gama de aplicações que utilizam microcontroladores, algumas são correlatas a este projeto, uma vez que também implementam sistemas robóticos. Dentre elas, podem-se citar: Robô Móvel Controlado Remotamente via Web (BIANCHINI; MENESES; MARCHI, 2007), que apresenta um protótipo de robô controlado por radiofrequência com uma câmera para exploração de ambientes hostis; Sistema Robótico para Almoxarifado (PARDO; BRITTO; COSTA, 2004), que envolve o projeto e a construção de um manipulador robótico para a manipulação de materiais em um almoxarifado ou armazém; Robô para Entrega de Objetos Microcontrolados (YACOUB; ANDRADE, 2003), que implementa um robô autônomo, microcontrolado, programável, destinado à locomoção de objetos. Este trabalho propõe o desenvolvimento de um protótipo de robô com mobilidade independente, capacidade para obter informações do ambiente, tomar decisões de acordo com instruções pré-programadas e atuar sobre esse ambiente de forma autônoma. Para isso, é utilizado o microcontrolador PIC16F628A (MICROCHIP, 2008) fabricado pela empresa Microchip. Este artigo está organizado em seções. A primeira seção é essa introdução, a seção 2 apresenta o objetivo da pesquisa. A metodologia utilizada na realização da pesquisa é apresentada na seção 3. As informações relacionadas ao desenvolvimento da pesquisa Anuário da Produção de Iniciação Científica Discente • Vol. XI, Nº. 12, Ano 2008 • p. 695-705 Luciano dos Santos Magalhães, Janaine Cristiane de Souza Arantes, Ivair Teixeira 697 como a revisão de literatura, o problema abordado, a solução proposta e implementada são mostradas na seção 4. A forma de abordar os experimentos, os resultados e as discussões são descritos na seção 5. Por fim, as considerações finais estão são apresentadas na seção 6. 2. OBJETIVO O objetivo deste trabalho consiste em construir um protótipo de robô para abastecimento automatizado de itens no almoxarifado de uma empresa. Para executar esse procedimento, cada produto é identificado por um código de barras e colocado sobre o robô. Após o carregamento dos itens, ele inicia a movimentação e busca o local reservado para aquele produto. Quando encontra o local, descarrega o mesmo e prossegue até finalizar todas as entregas. 3. METODOLOGIA Por se tratar de um projeto didático há um especial esforço pela construção manual e utilização de componentes de baixo custo. O formato, ou seja, a aparência do robô tem como base a construção abordada no trabalho correlato do robô móvel (BIANCHINI, MENESES e MARCHI, 2007). Porém, o foco da pesquisa é o funcionamento autônomo a partir de informações pré-programadas com respostas do meio ambiente, diferente do trabalho citado que utiliza controle remoto e interação em tempo real. Para a elaboração do projeto e construção do protótipo são realizadas a coleta das informações sobre as funcionalidades do robô proposto e a aquisição de materiais necessários para a sua construção. Nesse caso, optou-se pela utilização da metodologia de Engenharia de Software denominada modelo cascata (SOMMERVILLE, 2003). Após a construção do robô, é realizada a etapa de testes para analisar e avaliar os resultados obtidos. Um dos testes consiste na verificação de erros de identificação nos locais de entrega por leitura incorreta do código de barras. Outro teste é relativo à escolha efetiva do melhor caminho para a entrega do produto subsequente. 4. DESENVOLVIMENTO Para desenvolver o protótipo de robô proposto, inicialmente, é necessário o entendimento geral sobre automação industrial, microcontroladores PIC e código de barras. Anuário da Produção de Iniciação Científica Discente • Vol. XI, Nº. 12, Ano 2008 • p. 695-705 698 Abastecimento de estoque por robô microcontrolado 4.1. Automação Industrial Automação refere-se a um "sistema automático pelo qual os mecanismos controlam seu próprio funcionamento, quase sem a interferência do homem." (FERREIRA, 1993). O termo automação foi utilizado pela primeira vez em 1936 por D. S. Harder, que então trabalhava na General Motors nos EUA, para designar a princípio as fases automáticas e consecutivas do processo de produção. Dessa forma, automação pode ser vista como o uso de um dispositivo mecânico ou eletro-eletrônico para controlar um determinado processo, a partir de uma máquina ou robô, que tem suas funções previamente definidas em sua programação. 4.2. Microcontroladores PIC Segundo Martins (2005), a Intel foi pioneira no que diz respeito aos microprocessadores. Desde então, passou-se a buscar o aprimoramento do sistema de processamento de dados por meio desses componentes. Com base na arquitetura de um microprocessador e seus periféricos, surgiu o microcontrolador. Martins (2005) também afirma que "microcontroladores são pastilhas inteligentes, que tem um processador, pinos de entrada/saída e memória. Por meio da programação dos microcontroladores pode-se controlar suas saídas, tendo como referência as entradas ou um programa interno". Para Souza (2000), um microcontrolador pode ser definido como "um pequeno componente eletrônico, dotado de uma inteligência programável, utilizado no controle de processos lógicos". Neste projeto optou-se pela utilização do microcontrolador PIC 16F628A devido as suas características, que são: • Baixo custo; • Facilidade de programação; • Grande diversidade de periféricos internos; • Excelente velocidade de execução; • Apenas 35 instruções diferentes. Atualmente, existem diversos softwares que podem ser utilizados para o desenvolvimento de programas para microcontroladores PIC. O mais utilizado é o MPLAB (2008), desenvolvido pelo próprio fabricante do PIC para a plataforma Windows. Ele apresenta um ambiente integrado de programação, composto por um editor de texto e Anuário da Produção de Iniciação Científica Discente • Vol. XI, Nº. 12, Ano 2008 • p. 695-705 Luciano dos Santos Magalhães, Janaine Cristiane de Souza Arantes, Ivair Teixeira um gerenciador de projetos para o desenvolvimento de aplicações embutidas. 699 Suas características principais são: • Criação e edição do código fonte com a utilização de um editor interno; • Montagem, compilação e ligação do código fonte; • Depuração de erros; • Realização de medidas de sincronismo ou de temporização com o simulador ou emulador; • Suporte para a gravação do chip. O PIC pode ser programado em linguagem Mnemônica (Assembly), que é a linguagem padrão do MPLAB. Além do Assembly, outras linguagens podem ser utilizadas para compilação de alto nível, como por exemplo, Pascal, C e Basic. 4.3. Código de Barras Com a globalização do comércio e o crescente uso de computadores, as descrições de produtos precisaram ser substituídas por um sistema de identificação que pudesse ser usado em todos os setores da indústria e comércio em âmbito mundial. O código de barras é uma forma de representar os dados de um determinado produto por meio de uma sequência de símbolos no formato de barras. Com um leitor de código de barras é possível captar os dados do produto, de forma precisa e com baixo custo, para fornecer as informações necessárias em todos os pontos da cadeia de suprimento. Segundo a Associação Brasileira de Automação Comercial - ABAC (2008), no Brasil o Código Nacional de Produtos ou código de barras, que visa a identificação de produtos por equipamentos de automação, utiliza um padrão denominado EAN (European Article Number). Esse padrão foi aprovado pelo Decreto n. 90.595, de 29 de novembro de 1984 e a competência para administrá-lo em todo Território Nacional é da ABAC. Para a ABAC um sistema denominado GS1 constitui um conjunto de padrões que permitem o gerenciamento eficiente pela identificação inequívoca de produtos, unidades de despacho, ativos, localidades e serviços. Esse sistema facilita o processo de comércio eletrônico e inclui completa rastreabilidade. Um dos conceitos principais do sistema GS1 é a alocação de um número de identificação exclusivo - o número global de item comercial ou GTIN (Global Trade Item Number). Um GTIN pode ser construído por uma das quatro estruturas de numeração, de acordo com a aplicação exata e a simbologia de código de barras a ser usada. Essas estruturas são: Anuário da Produção de Iniciação Científica Discente • Vol. XI, Nº. 12, Ano 2008 • p. 695-705 700 Abastecimento de estoque por robô microcontrolado • Numeração GTIN-13 com 13 dígitos: uso geral para todos os itens que recebem preço e podem ser comercializados pela cadeia de suprimentos, por exemplo, itens unitários, embalagens multi-packs e algumas caixas. Ela é a identificação básica de todo item. • Numeração GTIN-14 com 14 dígitos: tem aplicação frequente em unidades logísticas, caixas, fardos e containers com grupos de itens homogêneos. Essa estrutura não pode ser processada no varejo, mas é aproveitada em toda a movimentação da carga, até o recebimento e estoque final. • Numeração GTIN-8 com 8 dígitos: aplicação em unidades de consumo muito pequenas, em virtude da restrição de espaço físico na embalagem, o que é mais comum em produtos do setor farmacêutico e hospitalar. Trata-se de uma exceção de aplicação, pois o uso geral pede numerações de 13 dígitos. • Numeração GTIN-12 com 12 dígitos: aplicação em itens exportados para os EUA e Canadá, até janeiro de 2005. 4.4. Construção do Protótipo O protótipo de robô proposto neste trabalho consiste em um carrinho microcontrolado autônomo, que transporta itens identificados por código de barras. Sua movimentação é guiada por um trilho em uma maquete desenhada no piso, de acordo com a Figura 1, que simula o ambiente de um almoxarifado. Esse almoxarifado é dividido em compartimentos Compartimento n Leitor de Código de Barras Compartimento 4 2 4 Compartimento 3 1 3 Compartimento 2 Produtos Compartimento 1 identificados por código de barras associados ao produto armazenado naquele local. Figura 1. Maquete do Almoxarifado. Inicialmente, os produtos são carregados manualmente no robô. A cada produto inserido é realizada a leitura do seu código de barras por um leitor acoplado ao robô e esse número é armazenado na memória. Ao atingir a capacidade de armazenamento de itens, inicia-se a movimentação e a leitura do código de barras em cada compartimento na busca do primeiro item a ser armazenado. Se esse código for encontrado, o produto em questão é Anuário da Produção de Iniciação Científica Discente • Vol. XI, Nº. 12, Ano 2008 • p. 695-705 Luciano dos Santos Magalhães, Janaine Cristiane de Souza Arantes, Ivair Teixeira 701 descarregado; caso contrário, o produto é armazenado no local de itens não existentes e o processo continua para o próximo item até finalizar todo o processo. Na Figura 2, é apresentado um trecho do firmware programado na linguagem Assembly para microcontroladores PIC, que é responsável pelo controle do leitor de código de barras e do motor de movimentação. Um algoritmo insere os códigos lidos em uma lista, que é utilizada para decidir se o robô avança ou retrocede na busca do próximo item a ser armazenado. Figura 2. Trecho do Firmware de Controle do Robô. O esquema elétrico completo é apresentado na Figura 3, que contém o microcontrolador, os demais componentes eletrônicos e as conexões externas. Figura 3. Esquema Elétrico do Robô. Anuário da Produção de Iniciação Científica Discente • Vol. XI, Nº. 12, Ano 2008 • p. 695-705 702 Abastecimento de estoque por robô microcontrolado Na Figura 4, podem ser visualizados os componentes para a construção do robô, os quais são totalmente constituídos a partir de materiais reciclados. Isso proporciona facilidade na aquisição dos materiais necessários e baixo custo de implementação. Figura 4. Componentes do Robô. A base do protótipo é uma placa de policarbonato que serve de sustentação para os produtos transportados e os demais componentes. A roda dianteira, retirada de uma cadeira de escritório, é do tipo movimentação livre e as rodas traseiras são discos de HD (Hard Disk) presas a um eixo único. O motor de passo utilizado é de uma impressora jato de tinta e está acoplado a uma engrenagem presa ao eixo, apresentado na Figura 5. Figura 5. Sistema de Transmissão. Anuário da Produção de Iniciação Científica Discente • Vol. XI, Nº. 12, Ano 2008 • p. 695-705 Luciano dos Santos Magalhães, Janaine Cristiane de Souza Arantes, Ivair Teixeira 703 O custo final do projeto é representado basicamente pelos componentes eletrônicos apresentados na Tabela 1, pois os demais materiais foram reaproveitados de sucatas tecnológicas. Tabela 1. Custo do Projeto. Componente Quantidade Valor Unitário Valor Total Resistor 220Ω 4 R$ 0,02 R$ 0,08 Resistor 470Ω 3 R$ 0,02 R$ 0,06 Resistor 10kΩ 1 R$ 0,02 R$ 0,02 PIC16F628A 1 R$ 7,00 R$ 7,00 Transistor BD139 4 R$ 0,50 R$ 2,00 Transistor BC548 2 R$ 0,10 R$ 0,20 Led Vermelho 5mm 1 R$ 0,10 R$ 0,10 Capacitor 47µF 1 R$ 0,30 R$ 0,30 Relês 2 R$ 4,00 R$ 8,00 Regulador 78L05 1 R$ 0,80 R$ 0,80 Bateria 6V x 4,5A 1 R$ 20,00 R$ 20,00 Total 5. R$ 38,56 RESULTADOS Com base no estudo dos trabalhos correlatos e no levantamento bibliográfico sobre automação industrial, microcontroladores PIC e código de barras foi possível realizar a construção do protótipo de robô proposto, mostrado na Figura 6. Figura 6. Protótipo de Robô. Os testes realizados após a construção do robô mostraram um funcionamento de forma adequada, conforme o objetivo deste trabalho. O armazenamento dos produtos Anuário da Produção de Iniciação Científica Discente • Vol. XI, Nº. 12, Ano 2008 • p. 695-705 704 Abastecimento de estoque por robô microcontrolado ocorreu de forma consistente, sem erros de identificação dos compartimentos do almoxarifado e na ordem prevista. O algoritmo que define se o robô avança ou retrocede na busca do próximo local do almoxarifado para descarregar o produto mostrou-se eficiente. 6. CONSIDERAÇÕES FINAIS De acordo com os estudos realizados, nota-se que tanto automação industrial quanto microcontroladores PIC são áreas de extrema relevância e tema de diversos projetos de pesquisa. Isso fica evidente pelo crescente número de projetos que executam tarefas previamente realizadas pelo homem e controlam sequências de operações sem a intervenção humana. Este trabalho teve como propósito a construção de um protótipo de robô com a utilização de microcontrolador PIC e componentes reciclados. O protótipo funciona de forma autônoma a partir de informações pré-programadas obtidas do meio ambiente. O estudo realizado apresenta mais uma aplicação que utiliza microcontroladores PIC, com baixo custo de implementação, fácil construção e possível expansão para utilização em soluções comerciais. A partir dos resultados obtidos, conclui-se que a construção do protótipo de robô, com a utilização de componentes de baixo custo, é viável e facilmente replicável em projetos futuros. Dentre eles, podem-se citar: • Utilização da tecnologia RFID (Radio Frequency Identification) para a identificação dos produtos e locais de armazenamento. • Armazenamento vertical dos produtos, além de horizontal. • Conexão sem fio com o microcomputador para o controle dos itens armazenados no almoxarifado. REFERÊNCIAS ABAC. ABAC - Associação Brasileira de Automação Comercial. Disponível em: <http://www.gs1brasil.org.br/main.jsp?lumChannelId=28040E9A165411DB9E2BDB753E7F9C5C> Acesso em: maio 2008. BIANCHINI, Douglas; MENESES, Michael Bissoto; MARCHI, Victor Luiz de. Robô Móvel Controlado Remotamente via Web. 2007. Trabalho de Conclusão de Curso (Graduação em Ciência da Computação) - Faculdades Integradas de Valinhos. FERREIRA, Aurélio Buarque de Holanda. Aurélio Dicionário da Língua Portuguesa. Rio de Janeiro: Editora Nova Fronteira, 1993. MARTINS, Nardênio Almeida. Sistemas Microcontrolados. São Paulo: Novatec Editora, 2005. MICROCHIP. PIC16F627A/628A/648A Data Sheet. Disponível em: <http://ww1.microchip.com/downloads/en/DeviceDoc/40044F.pdf>. Acesso em: mar. 2008. Anuário da Produção de Iniciação Científica Discente • Vol. XI, Nº. 12, Ano 2008 • p. 695-705 Luciano dos Santos Magalhães, Janaine Cristiane de Souza Arantes, Ivair Teixeira 705 MPLAB. MPLAB Integrated Development Environment. Disponível em: <http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1406&dDocNa me=en019469&part=SW007002>. Acesso em: set. 2008. NATALE, Ferdinando. Automação Industrial. 7. ed. São Paulo: Érica, 2005. PARDO, Douglas Domingues; BRITTO, Diogo Favari; COSTA, Marcelo Rogério. Sistema Robótico para Almoxarifado. 2004. Trabalho de Conclusão de Curso. (Graduação em Engenharia de Controle e Automação) - Instituto Mauá de Tecnologia. PEREIRA, Fábio. Microcontroladores PIC: técnicas avançadas. 3.ed. São Paulo: Érica, 2002. PEREIRA, Luciano Rodrigues et al. Sistema de Controle Digital Utilizando Computador Pessoal. 2007. Trabalho de Conclusão de Curso (Graduação em Ciência da Computação) - Faculdades Integradas de Valinhos. SOMMERVILLE, Ian. Engenharia de Software. 6. ed. São Paulo: Addison Wesley, 2003. SOUZA, David José de. Desbravando o PIC. São Paulo: Editora Érica, 2000. ______. Desbravando o PIC: ampliado e atualizado para PIC16F628A. 8.ed. São Paulo: Érica, 2003. SOUZA, David José de; LAVINIA, Nicolás César. Conectando o PIC16F877A: recursos avançados. 2.ed. São Paulo: Érica, 2005. TEIXEIRA, Ivair; ARANTES, Janaine Cristiane de Souza; MACEDO, Jeancarlo. Frequencímetro Digital com a Utilização de Microcontrolador PIC. Anuário da Produção Acadêmica Docente 2007, Valinhos, v. I, n. 1, p. 168-173, 2007. TEIXEIRA, Ivair; COSTA, Joel Garcia da; PIRES, Sheila Cristina. Central de Alarme Residencial Home Security. 2005. Trabalho de Conclusão de Curso (Graduação em Ciência da Computação) Faculdades Integradas de Valinhos. YACOUB, M. N.; ANDRADE, M. Robô para Entrega de Objetos Microcontrolados. In: III Mostra de Produção Científica do UNISAL, 2003, Campinas. Anais da III Mostra de Produção Científica do UNISAL. Campinas/SP: Editora Arte Brasil, 2003. Anuário da Produção de Iniciação Científica Discente • Vol. XI, Nº. 12, Ano 2008 • p. 695-705
Baixar