UMA PLATAFORMA ABERTA E DE BAIXO CUSTO DE ROBÔ MÓVEL
PARA PROPÓSITO GERAL
0$768085$7DNDR
8QLYHUVLGDGH(VWDGXDO3DXOLVWD-~OLRGH0HVTXLWD)LOKR8QHVS
PDWVXPXUDWNR#JPDLOFRP
)(5$62/,),/+2+XPEHUWR
8QLYHUVLGDGH(VWDGXDO3DXOLVWD-~OLRGH0HVTXLWD)LOKR8QHVS
Bauru - SP
IHUDVROL#IFXQHVSEU
MARRANGHELLO, Norian
8QLYHUVLGDGH(VWDGXDO3DXOLVWD-~OLRGH0HVTXLWD)LOKR8QHVS
6mR-RVpGR5LR3UHWR63
QRULDQ#LELOFHXQHVSEU
RESUMO: 3HVTXLVDVQDUREyWLFDPyYHOWHPVLGRLPSXOVLRQDGDVSHORVDYDQoRVWHFQROyJLFRV([LVWHP
IUHQWHVGHSHVTXLVDVTXHDERUGDPGLIHUHQWHVDVSHFWRVHGHVD¿RVGDUREyWLFDPyYHOGHQWUHRVTXDLV
pSRVVtYHOFLWDUWySLFRVFRPRORFRPRomRQDYHJDomRHDUTXLWHWXUDGHFRQWUROH(VVHFUHVFLPHQWRHP
SHVTXLVDVDFDUUHWDXPDPDLRUQHFHVVLGDGHSRUSODWDIRUPDVGHURE{VTXHSRVVDPVHUGHVWLQDGDVj
SHVTXLVDHWDPEpPSDUD¿QVHGXFDFLRQDLV(VWHWUDEDOKRSURS}HXPDDOWHUQDWLYDGHSODWDIRUPDGHURE{
PyYHOGHEDL[RFXVWRGHDUTXLWHWXUDGHKDUGZDUHVRIWZDUHHFRQWUROHDEHUWDGHVWLQDGDDDWLYLGDGHV
GHSURSyVLWRVJHUDLV$SODWDIRUPDDOPHMDDIDFLOLWDomRHÀH[LELOL]DomRGRSURFHVVRGHGHVHQYROYLPHQWR
GHHVWXGRVHDSOLFDo}HVUREyWLFDVSRUPHLRGHXPDLQWHUIDFHGHFRPXQLFDomRVLPSOL¿FDGDHSHODDEVWUDomRGDKHWHURJHQHLGDGHGRVGLVSRVLWLYRVSHULIpULFRVGHKDUGZDUHVHQGRDVVLPFDSD]GHRIHUHFHU
PDLRUOLEHUGDGHHPUHODomRjVOLQJXDJHQVGHSURJUDPDomRSDUDGLJPDVGHFRQWUROHHWHFQRORJLDVGH
controle.
Palavras-chave: SODWDIRUPDGHURE{PyYHODUTXLWHWXUDDEHUWDLQWHUIDFHGHFRPXQLFDomR
ABSTRACT: The research on mobile robots has been driven by technological advances. There are
research fronts on different aspects and challenges of mobile robots, among which are topics such as
locomotion, navigation and control architectures. This growth in researches also leads to greater need
for mobile robot platforms that can be used for research and educational purposes. This work presents
an alternative of low cost mobile robot platform with an open hardware, software and control architecture, for use in general purposes activities. This platform aims to ease and turn more Àe[ible the development process of research and application on robotics through a simpli¿ed communication interface and
abstracting the heterogeneity of the peripheral hardware devices, being able to offer greater freedom in
relation to programming languages, control paradigms and control technologies.
Keywords: mobile robot platform, open architecture, communication interface.
1. INTRODUÇÃO
2 FDPSR GD UREyWLFD PyYHO YHP
VHQGRFDGDYH]PDLVH[SORUDGReXPDUHDOLGDGHTXHDFRPSDQKDRSURJUHVVRWHFQROyJLFR +RMH HP GLD URE{V PyYHLV SRGHP
VHUIUHTXHQWHPHQWHYLVWRVHPGLYHUVDViUHDVDOpPGRVWUDGLFLRQDLVVHWRUHVLQGXVWULDLV
FRPRMiSRGHPVHUDVVRFLDGRVDDSOLFDo}HV
DJUtFRODVKRVSLWDODUHVHGRPpVWLFDV(VVD
SRSXODUL]DomR GD UREyWLFD PyYHO WHP HVWL-
94
PXODGRSHVTXLVDVQHVVDiUHDTXHHQYROYH
RXWUDV iUHDV FRPR PHFkQLFD PDWHPiWLFD
ItVLFDHOHWU{QLFDFRPSXWDomRHELRORJLD(
GHYLGRjVXDQDWXUH]DPXOWLGLVFLSOLQDUDUREyWLFDPyYHOSRGHVHUDERUGDGDDSDUWLUGH
GLIHUHQWHVSHUVSHFWLYDV
([LVWHP IUHQWHV GH SHVTXLVDV TXH
DERUGDPGLIHUHQWHVDVSHFWRVHGHVD¿RVGD
UREyWLFDPyYHOGHQWUHRVTXDLVHVWmRWySLFRV
FRPR ORFRPRomR QDYHJDomR H DUTXLWHWXUD
GH FRQWUROH 2 FUHVFLPHQWR HP SHVTXLVDV
Interciência
& Sociedade
,QWHUFLrQFLD6RFLHGDGH,6619RO1
WDPEpP DFDUUHWD XPD PDLRU QHFHVVLGDGH
SRUEDVHVPyYHLVHPRXWUDVSDODYUDVSRU
SODWDIRUPDV GH URE{V PyYHLV TXH SRVVDP
ser destinadas jVLQLFLDWLYDVTXHHQYROYDP
DUREyWLFDPyYHO(PERUDH[LVWDPVROXo}HV
FRPHUFLDLV SDUD HVVDV SODWDIRUPDV GH URE{VPyYHLVDLQGDH[LVWHPVpULDVOLPLWDo}HV
HPUHODomRjÀH[LELOLGDGHWDQWRHPWHUPRV
de hardware utilizado, como sensores e
atuadores, assim como em relação aos
software TXH FRVWXPDP VHU SURSULHWiULRV
HIHFKDGRV(VVDVOLPLWDo}HVVHHVWHQGHP
HPUHODomRjVQHFHVVLGDGHVGHDOWHUDo}HV
TXH VmR FRPXQV HP WHUPRV GH hardware,
IDWRUHVTXHDFDEDPLQÀXHQFLDQGRGHIRUPD
GHFLVLYD VREUH D HPSUHJDELOLGDGH GH WDLV
VROXo}HVWDQWRHPDSOLFDo}HVJHUDLVFRPR
QRkPELWRFLHQWt¿FRHGLGiWLFR
([LVWHPRXWUDVLQLFLDWLYDVQDOLWHUDWXUD TXH SURSXVHUDP DPELHQWHV H DUTXLWHWXUDV YROWDGDV SDUD R GHVHQYROYLPHQWR GH
URE{VPyYHLVTXHREMHWLYDUDPDIDFLOLWDomR
H D VLPSOL¿FDomR GR SURFHVVR GH GHVHQYROYLPHQWR GH URE{V PyYHLV e R FDVR GH
WUDEDOKRV FRPR RV SURSRVWRV SRU [1,3,4],
TXH SURS}HP IHUUDPHQWDV H DPELHQWHV GH
SURJUDPDomRUREyWLFRVFRPELEOLRWHFDVGH
FyGLJR DEHUWR FRQFHELGDV HP GLYHUVDV OLQJXDJHQVGHSURJUDPDomR
'HVWD IRUPD XPD SODWDIRUPD GH
URE{ PyYHO GH DUTXLWHWXUD GH FRQWUROH GH
software e de hardwareDEHUWDSRGHDSUHVHQWDUVH FRPR XPD DOWHUQDWLYD GLDQWH GH
tal cenário. Adicionalmente, atributos como
VLPSOLFLGDGHHPDQREUDELOLGDGHDVVRFLDGRV
jIDFLOLGDGHGHDOWHUDo}HVItVLFDVVHQVRUHV
HDWXDGRUHVSRGHPFRQWULEXLUGHIRUPDGHFLVLYDQDDSOLFDELOLGDGHGHXPDSODWDIRUPD
GH URE{ PyYHO$R EXVFDU WDLV FDUDFWHUtVWLFDV XPD SODWDIRUPD GH URE{ PyYHO SRGH
DSUHVHQWDUVHFRPRXPDDOWHUQDWLYDGHIHUUDPHQWD LQWHUHVVDQWH QR GHVHQYROYLPHQWR
GHDSOLFDo}HVHQYROYHQGRDUREyWLFDPyYHO
(SRGHDLQGDVHUHPSUHJDGDFRPRIHUUDPHQWD GH HQVLQR H EDVH GH LQYHVWLJDo}HV
GHDVVXQWRVUHODFLRQDGRVjUREyWLFDPyYHO
(VWH WUDEDOKR DSUHVHQWD D LPSOHPHQWDomRGHXPDSODWDIRUPDGHURE{PyYHO
DEHUWD H GH EDL[R FXVWR GH DUTXLWHWXUD GH
KDUGZDUH H VRIWZDUH DEHUWD (VWD SODWDIRUPDRIHUHFHVXSRUWHDGLIHUHQWHVFHQiULRVH
WHFQRORJLDVGHVLVWHPDVGHFRQWUROHDWUDYpV
GHXPDLQWHUIDFHSDGURQL]DGDGHFRPXQLFD-
95
omR$OpPGLVVRHVWDSODWDIRUPDLPSOHPHQWD FRQFHLWRV VLPSOHV H EHP HVWDEHOHFLGRV
FRPR DUTXLWHWXUD FOLHQWHVHUYLGRU VLVWHPD
IRUWHPHQWH DFRSODGR H LQWHUIDFH GH FRPXQLFDomR VHULDO (P YLUWXGH GD VLPSOLFLGDGH
FRQFHLWXDOHQYROYLGDHVWDSODWDIRUPDSRGH
VHU IDFLOPHQWH HPSUHJDGD HP DSOLFDo}HV
JHUDLV HQYROYHQGR D UREyWLFD PyYHO &RP
LVVR HVWD SODWDIRUPD VH DSUHVHQWD FRPR
XPDDOWHUQDWLYDYLiYHOSDUDDIDFLOLWDomRGR
SURFHVVR GH GHVHQYROYLPHQWR GH VRIWZDUH
GHFRQWUROH$OpPGHVHXEDL[RFXVWRUHODWLYRDSODWDIRUPDDSUHVHQWDGDPRWLYDRUHDSURYHLWDPHQWR GH VHXV PyGXORV GH PRGR
LQGHSHQGHQWHDRHVTXHPDGHFRQWUROHRXj
tecnologia de controle adotada.
'HPRGRDYDOLGDUHVWDSODWDIRUPD
GRLVH[SHULPHQWRVIRUDPHODERUDGRVHUHDOL]DGRV SDUD GHPRQVWUDU TXH D DUTXLWHWXUD
DSUHVHQWDGD RIHUHFH ÀH[LELOLGDGH HP UHODomR j SODWDIRUPD GH FRQWUROH 1R SULPHLUR H[SHULPHQWR IRL HODERUDGR XP FHQiULR
LQYHVWLJDWLYR HQYROYHQGR D QDYHJDomR GH
URE{VPyYHLV1HVWHSULPHLURFHQiULRXWLOL]RXVHDSODWDIRUPDFRQWURODQGRDGHIRUPD
UHPRWDDWUDYpVGHXPsoftwareGHQDYHJDomR VHQGR H[HFXWDGR HP XP FRPSXWDGRU
SHVVRDO -i QR VHJXQGR H[SHULPHQWR IRL
DYDOLDGD D ÀH[LELOLGDGH GD SODWDIRUPD HP
termos de tecnologia de sistemas de conWUROH H VXD FDSDFLGDGH GH DGDSWDomR DR
DFUHVFHQWDUGLVSRVLWLYRVGHKDUGZDUH3DUD
R VLVWHPD GH FRQWUROH GD SODWDIRUPD VHUYLGRU RV VRIWZDUH GDV DSOLFDo}HV H VXDV
ELEOLRWHFDV IRUDP LPSOHPHQWDGDV HP &
SDUDDPELHQWHV:LQGRZVHHQWmRDGDSWDGDVSDUDR$UGXLQR
2. ARQUITETURA DA PLATAFORMA DE
ROBÔ MÓVEL
Considerando a destinação de
SURSyVLWR JHUDO GD SODWDIRUPD GH URE{ PyYHO DSUHVHQWDGD p DSURSULDGD D DGRomR
GH XPD DUTXLWHWXUD TXH RIHUHoD IDFLOLGDGH
GH HQWHQGLPHQWR H DLQGD SHUPLWD XP JUDX
GH ÀH[LELOLGDGH GH KDUGZDUH SDUD VHU
PRGL¿FDGDGHDFRUGRFRPDVQHFHVVLGDGHV
GDV DSOLFDo}HV 'HVWD IRUPD RSWRXVH SRU
adotar XPD DUTXLWHWXUD SUHIHUHQFLDOPHQWH
VLPSOHVWDQWRHPWHUPRVFRQFHLWXDLVFRPR
WpFQLFR ,VVR SHUPLWH IiFLO FRPSUHHQVmR H
SUDWLFLGDGH HP WHUPRV GH LPSOHPHQWDomR
Interciência
& Sociedade
,QWHUFLrQFLD6RFLHGDGH,6619RO1
WRUQDQGR R XVR GD SODWDIRUPD LQWHUHVVDQWH
HPRWLYDGRU$VVLPVHQGRDGLVSRVLomRGD
DUTXLWHWXUD GD SODWDIRUPD GH URE{ PyYHO H
VHXVFRPSRQHQWHVIRUDPGLYLGLGRVHPWUrV
camadas, sendo estas:
&DPDGD 6XSHULRU &DPDGD QD
TXDO p LPSOHPHQWDGD R softwareGHFRQWUROHUHVSRQViYHOSHOR
SURFHVVDPHQWR GRV GDGRV H OHLturas dos sensores, tomada de
GHFLV}HV H DLQGD SHOR FRQWUROH
GHDFLRQDPHQWRGRVDWXDGRUHV
&DPDGD ,QWHUPHGLiULD &DPDGD UHVSRQViYHO SRU HVWDEHOHFHU
a comunicação entre a Camada
6XSHULRU H D &DPDGD ,QIHULRU
Esta camada abrange a interface
comum de hardwareRSURWRFROR
GH FRPXQLFDomR SDGURQL]DGR H
$3,V H ELEOLRWHFDV GH LQWHUIDFH
UHVSRQViYHLVSHODDEVWUDomRGRV
GHWDOKHVHVSHFt¿FRVGHWRGRVRV
GLVSRVLWLYRV SHULIpULFRV ORFDOL]DGRVQD&DPDGD,QIHULRU
&DPDGD ,QIHULRU &RUUHVSRQGH
DRV GLVSRVLWLYRV SHULIpULFRV GH
hardware LPSOHPHQWDGRV H IXQcionais, abrangendo tanto sensores como atuadores.
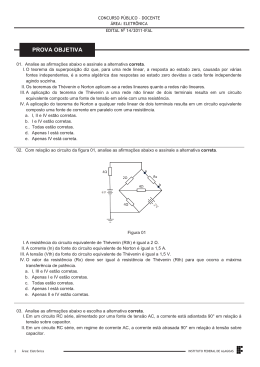
$ )LJXUD LOXVWUD D GLVSRVLomR GD
DUTXLWHWXUDGDSODWDIRUPDHVXDVFDPDGDV
Sistema de Controle
Bibliotecas de
Interface
Camada
Superior
Servidor
d
Camada
Intermediária
Cliente
...
Atuador N
Atuador B
Interface de
Comunicação
Atuador A
...
Sensor N
Sensor B
Sensor A
Controlador
Camada
Inferior
Figura 1 -'LVSRVLomRGD$UTXLWHWXUD
(VWD SODWDIRUPD DGRWD XPD DUTXLtetura de software GR WLSR FOLHQWHVHUYLGRU
96
RQGH R &OLHQWH UHSUHVHQWD D EDVH GR URE{
PyYHOHR6HUYLGRUFRUUHVSRQGHDRVLVWHPD
GLVSRQtYHOSDUDRFRQWUROH26HUYLGRUSRGH
WDQWRVHUHPEDUFDGRFRPDFRQH[mRVHQGR
estabelecida diretamente no barramento de
comunicação, ou remoto, sendo a comunicação estabelecida com a utilização de
WHFQRORJLDVGHFRQH[mRVHP¿RFRPR5)
:L)LRX%OXHWRRWK
1HVWD DUTXLWHWXUD R 6HUYLGRU p
FRPSRVWRSHOR6LVWHPDGH6RIWZDUHGHVXSRUWH SDUD D$UTXLWHWXUD GH &RQWUROH$3,V
H ELEOLRWHFDV UHVSRQViYHLV SHOD LQWHUIDFH
e abstração da comunicação estabelecida
FRP R &OLHQWH $ &DPDGD 6XSHULRU FRPSUHHQGH WHFQRORJLDV FRPSXWDFLRQDLV FRPR
FRPSXWDGRUHV SHVVRDLV FRPSXWDGRUHV
SRUWiWHLV RX GLVSRVLWLYRV HPEDUFiYHLV GH
SURFHVVDPHQWR FRPR PLFURFRQWURODGRUHV
)3*$ $UGXLQR 5DVSEHUU\ 3L GHQWUH RXWURV -i R &OLHQWH FRUUHVSRQGH j EDVH GH
URE{PyYHORQGHVHHQFRQWUDR&RQWURODGRU
HRVPyGXORVGHKDUGZDUHSHULIpULFRV
Para o Controlador, foi adotado o
FRQFHLWR GH VLVWHPD IRUWHPHQWH DFRSODGR
DWULEXLQGR D XP ~QLFR DJHQWH D WDUHID GH
JHUHQFLDU WRGRV RV GLVSRVLWLYRV GH VHQVRULDPHQWRHDWXDomR,VVRFRQIHUHjSODWDIRUPDPHQRUFRPSOH[LGDGHHPFRPSDUDomRj
DERUGDJHPFRQFHLWXDOTXHXPVLVWHPDIUDFDPHQWHDFRSODGRDFDUUHWD8PRXWURIDWRU
TXH OHYRX j HVVD HVFROKD IRL D QHFHVVLGDGHGHXPQ~PHURUHGX]LGRGHGLVSRVLWLYRV
GHGLFDGRVGHJHUHQFLDPHQWRGRVGLVSRVLWLYRVSHULIpULFRVHSRUWDQWRPHQRUFXVWRGH
LPSOHPHQWDomRHPDQXWHQomR$OpPGLVVR
com esta abordagem, p SRVVtYHO PLWLJDU
HUURV H IDOKDV UHODFLRQDGDV DR GHVHQYROYLPHQWR LPSOHPHQWDomR H DOWHUDo}HV GRV
PyGXORVORFDOL]DGRVQD&DPDGD,QIHULRU
$R GHL[DU HP DEHUWR TXHVW}HV
FRPR DUTXLWHWXUD GH FRQWUROH H DUTXLWHWXUD
GH VRIWZDUH HVWD SODWDIRUPD RIHUHFH QHXWUDOLGDGH HP UHODomR j LPSOHPHQWDomR GH
TXDOTXHUSDUDGLJPDGHFRQWUROHDSUHVHQWDGRVSRU[5,7]LPSOLFDQGRWDPEpPHPXPD
QHXWUDOLGDGH HP UHODomR j OLQJXDJHP GH
SURJUDPDomR XWLOL]DGD (VVD DERUGDJHP
oferece ao usuário maior liberdade na escoOKDGDOLQJXDJHPGHSURJUDPDomRTXHPHOKRU DWHQGD jV QHFHVVLGDGHV GD DSOLFDomR
RXVLPSOHVPHQWHHPUD]mRGDIDPLOLDULGDGH
com determinada linguagem ou ambiente
Interciência
& Sociedade
,QWHUFLrQFLD6RFLHGDGH,6619RO1
GHGHVHQYROYLPHQWR(HVVDOLEHUGDGHSRU
VXD YH] VH HVWHQGH WDPEpP j WHFQRORJLD
GHFRQWUROHHPSUHJDGD
Para a comunicação de dados, foi
DGRWDGRRVHULDOFRPSDWtYHOHFRPVXSRUWH
DRSDGUmR56HPERUDH[LVWDPRXWURV
SDGU}HV VHULDLV GH FRPXQLFDomR FRPR R
SDGUmR86%'HDFRUGRFRP[8]R56
pXPDLQWHUIDFHFXMDFRQHFWLYLGDGHSRGHVHU
GLUHFLRQDGDHPDSOLFDo}HVTXHH[LMDPSRXFD RX PpGLD ODUJXUD GH EDQGD ( DSHVDU
GHVHWUDWDUGHXPSDGUmROHJDWyULRRVHULDO
DSUHVHQWD DVSHFWRV IDYRUiYHLV HP UHODomR
DRWLSRSDUDOHORHDWpPHVPRHPUHODomR
DSDGU}HVPDLVPRGHUQRVFRPRR86%2
SULQFLSDO DVSHFWR FRQVLGHUDGR SDUD WDO HVFROKD IRL VXD VLPSOLFLGDGH XPD YH] TXH R
SRUWR VHULDO DSUHVHQWDVH FRPR XPD DOWHUQDWLYD GH IiFLO HQWHQGLPHQWR LPSOHPHQWDomRHXVR3DGU}HVPDLVPRGHUQRVFRPR
R 86% SRU SRVVXtUHP GLYHUVRV PRGRV GH
RSHUDomRFRQHFWLYLGDGHVHUHFXUVRVFRPR
o Plug-and-PlayDSUHVHQWDPH[WHQVDVGRFXPHQWDo}HV H DFDEDP H[LJLQGR FRQKHFLPHQWRVPDLVDYDQoDGRV,VVRSRGHQXPSULPHLURLQVWDQWHGHVHQFRUDMDUVXDXWLOL]DomR
$OpPGLVVRRSDGUmRVHULDODLQGDSRGHVHU
HQFRQWUDGR HP GLVSRVLWLYRV HPEDUFiYHLV
FRPR)3*$VH5DVSEHUU\3L-iR86$57p
XPSDGUmRGHFRPXQLFDomRGHGDGRVVHULDO
SRQWR D SRQWR VHQGR FRPXPHQWH HPSUHJDGR HP FRQMXQWR FRP R SDGUmR 56
56 GHQWUH RXWURV $ FRPELQDomR GD
VLPSOLFLGDGHRIHUHFLGDSHORSDGUmR86$57
HPFRQMXQWRFRPRSDGUmR56pDLQGD
LQWHUHVVDQWHHFRQYHQLHQWHWDQWRHPWHUPRV
GLGiWLFRVFRPRWpFQLFRVRTXHSHUPLWHIiFLO
LPSOHPHQWDomR H XWLOL]DomR SRU SDUWH GRV
XVXiULRV &RP LVVR p SRVVtYHO FRQFHQWUDU
PDLRUSDUWHGRVHVIRUoRVQDVTXHVW}HVUHODFLRQDGDVjUREyWLFDRXDRWySLFRGHLQWHresse e sem desestimular o usuário, desde
R HVWXGDQWH DWp XP SHVTXLVDGRU ( GH IRUPD D RIHUHFHU PDLRU ÀH[LELOLGDGH HP UHODomRjFRQHFWLYLGDGHXPDOLQKDDGLFLRQDOGH
comunicação direta oferece ao usuário da
SODWDIRUPDGHURE{PyYHODFHVVRDRWHUPLQDLV(86$57GRPLFURFRQWURODGRUXWLOL]DGR
GDQGRPDLRUOLEHUGDGHGHDFRSODUGLIHUHQWHV
HVTXHPDVItVLFRVGHSODWDIRUPDVGHFRQWUROH RX GLVSRVLWLYRV GH FRPXQLFDomR VHP ¿R
UiGLR:L)LRXEOXHWRRWK
97
3. A PLATAFORMA DE ROBÔ MÓVEL
2 SURFHVVR GH GHVHQYROYLPHQWR
GR FRUSR GH XP URE{ PyYHO GHYH VHU IHLWR
EXVFDQGRXPIRUPDWRTXHPHOKRUVHDGDSWHDRVUHTXLVLWRVGDDSOLFDomR1RHQWDQWR
HVWH SURFHVVR GHSHQGH WDPEpP GH RXWURV
DVSHFWRV FRPR OLPLWDo}HV WHFQROyJLFDV H
HFRQ{PLFDV 'HVWD IRUPD R FXVWR WRWDO GH
DTXLVLomRGRVPDWHULDLVXWLOL]DGRVpXPIDWRU
IXQGDPHQWDO SULQFLSDOPHQWH DR VH SURSRU
XPD DOWHUQDWLYD GH EDL[R FXVWR 3DUD HVWH
WUDEDOKR R FXVWR WRWDO GRV FRPSRQHQWHV H
PDWHULDLV¿FRXHPWRUQRGH51HVte cálculo foram desconsiderados os cusWRV GR VHX GHVHQYROYLPHQWR H PRQWDJHP
Mi TXH VHUYH DSHQDV SDUD HOXFLGDU R EDL[R
FXVWR UHODWLYR GR URE{$OpP GLVVR R YDORU
GRFXVWRUHDOGHSHQGHGHYDULiYHLVGHPHUFDGRTXHIRJHPGRHVFRSRGHVWHWUDEDOKR
3DUDSHUPLWLUTXHDSODWDIRUPDSRVVDVHUGHVWLQDGDjVDSOLFDo}HVJHUDLVpGHVHMiYHOTXHRKDUGZDUHGRURE{PyYHOVHMD
UHXWLOL]iYHO H DLQGD SHUPLWD PRGL¿FDo}HV
GHPRGRUiSLGRHGHVFRPSOLFDGR(VWDSRVVLELOLGDGH GH UHXWLOL]DomR SRGH DFHOHUDU R
GHVHQYROYLPHQWR GH DSOLFDo}HV UREyWLFDV
DOpP GH UHGX]LU VXEVWDQFLDOPHQWH D RFRUrência de erros. No entanto, a reutilização
GRVPyGXORVGHKDUGZDUHHPVLVWHPDVUREyWLFRVDVVLPFRPRDSRVVLELOLGDGHGHDGLFLRQDU FRPSRQHQWHV FRQWLQXD DLQGD PXLWR
OLPLWDGD&RPRDVDUTXLWHWXUDVGRVPyGXORV
GHKDUGZDUHUREyWLFRVFRVWXPDPVHUH[WUHPDPHQWHHVSHFLDOL]DGDVHYROWDGDVjVDSOLFDo}HV¿QDLVLVWRDFDEDGL¿FXOWDQGRDLQGD
PDLVRSURFHVVRGHDGLomRRXDOWHUDomRGRV
PyGXORVGHKDUGZDUH(VVHDVSHFWRDFDED
VHWRUQDQGRXPJUDQGHREVWiFXORSULQFLSDOPHQWHHPLQLFLDWLYDVGLGiWLFDVHFLHQWt¿FDV
HQYROYHQGRDUREyWLFDPyYHO$VROXomRGH
XWLOL]DUXPDDUTXLWHWXUDPRGXODUGHKDUGZDUHHPRXWUDVSDODYUDVVXEVLVWHPDVDLQGD
TXH VHMD XPD DERUGDJHP YiOLGD QmR VH
PRVWUDVX¿FLHQWHPHQWHÀH[tYHOHDLQGDVXSRUWD XPD SHTXHQD TXDQWLGDGH GH IXQFLRnalidades [6].
$ )LJXUD LOXVWUD D EDVH GH URE{
PyYHOFRQFHELGDGHQRPLQDGR.LKRQ
Interciência
& Sociedade
,QWHUFLrQFLD6RFLHGDGH,6619RO1
ORFRPRomR DOpP GH PHFDQLVPRV GH VXSRUWHjVWpFQLFDVUHODWLYDVGHORFDOL]DomRH
QDYHJDomR
2V GLVSRVLWLYRV DWXDGRUHV LPSOHmentados no Kihon foram:
'RLV PRWRUHV GH FRUUHQWH FRQWtQXDFRPFDL[DGHUHGXomR
8PVHUYRPRWRU
-iRVGLVSRVLWLYRVVHQVRUHVLPSOHmentados foram:
Figura 2 - 5RE{0yYHO.LKRQ
(PUHODomRDRDVSHFWRItVLFRHPHFkQLFRGDEDVHGRURE{PyYHO.LKRQDSUHVHQWDGRIRLFRQVLGHUDGRTXHVHXDPELHQWH
GHDSOLFDomRVHOLPLWDjVDSOLFDo}HVHPVXSHUItFLHVSODQDVFRPSRXFDVLUUHJXODULGDGHV
$VVLPSDUDDORFRPRomRGR.LKRQGHQWUH
RXWUDV DOWHUQDWLYDV SRVVtYHLV DGRWRXVH D
ORFRPRomREDVHDGDHPURGDVXPDYH]TXH
são as mais comumente encontradas na roEyWLFD PyYHO 8PD VpULH GH IDWRUHV MXVWL¿FDPWDOHVFROKDGHQWUHRVTXDLVpSRVVtYHO
FLWDUREDL[RFXVWRVHMDQDLPSOHPHQWDomR
FRPR PDQXWHQomR HVWDELOLGDGH H WDPEpP
SHOD VLPSOLFLGDGH WDQWR PHFkQLFD FRPR
GH FRQWUROH$V URGDV DSUHVHQWDP HOHYDGR
JUDXGHH¿FLrQFLDHPDSOLFDo}HVWHUUHVWUHV
HVSHFL¿FDPHQWH HP VXSHUItFLHV SODQDV (
DLQGD D DOWHUQDWLYD DGRWDGD VH DGHTXD DR
DPELHQWHGHDSOLFDomRQRTXDODSODWDIRUPD
GHURE{PyYHOVHUiGHVWLQDGD$OpPGLVVR
GHFLGLXVH SHOD DGRomR GR PRGHOR GH WUDomRGLIHUHQFLDOSRUVHUFRPXPHQWHHPSUHJDGRQDUREyWLFDPyYHO2PRGHORFLQHPiWLFRGDWUDomRGLIHUHQFLDOpPHQRVFRPSOH[R
HPUHODomRjVRXWUDVGLVSRVLo}HVSRVVtYHLV
$LQGD p SRVVtYHO FLWDU DOJXPDV FDUDFWHUtVWLFDVGHVVDGLVSRVLomRFRPRVLPSOLFLGDGH
UHODWLYREDL[RFXVWRHIDFLOLGDGHGHFRQVWUXomR ( SRU ¿P VXD FRPSUHHQVmR p PDLV
LQWXLWLYDRTXHIDFLOLWDRGHVHQYROYLPHQWRGH
seu controle de locomoção.
'H PRGR D VXSRUWDU XPD TXDQWLGDGH LQLFLDO GH DSOLFDo}HV IRL LPSOHPHQWDGR XP FRQMXQWR SDGUmR GH PyGXORV GH
KDUGZDUHQDSODWDIRUPDDSUHVHQWDGD'HVWD IRUPD IRL LPSOHPHQWDGR XP VLVWHPD GH
98
'RLVVHQVRUHVySWLFRVUHÀH[LYRV
7UrV PyGXORV GH VHQVRUHV GLJLWDLVGHSUR[LPLGDGHySWLFRVGLJLWDLV
'RLV VHQVRUHV ySWLFRV UHÀH[LYRV
GHVROR
Um sonar.
2 JHUHQFLDPHQWR GRV GLVSRVLWLYRV
SHULIpULFRVDSUHVHQWDGRVDFLPDpUHDOL]DGR
SRUPHLRGHXP~QLFRDJHQWHHPEDUFDGRQD
EDVHGDSODWDIRUPDR&RQWURODGRUGH5RE{
0yYHO'HQWUHRXWUDVSRVVLELOLGDGHVGHHVFROKDSDUDHVWH&RQWURODGRURSWRXVHSHOD
XWLOL]DomR GR 3,&) XP PRGHOR GH
PLFURFRQWURODGRU GD IDPtOLD 3,& SURGX]LGR
SHOD 0LFURFKLS 'LYHUVRV IDWRUHV FRQWULEXtUDPSDUDVXDHVFROKDFRPRHQTXDGUDPHQWR DR HVFRSR GR SURMHWR EDL[R FXVWR EDL[RFRQVXPRHGLVSRQLELOLGDGHQRPHUFDGR
$OpP GLVVR HVWH PLFURFURQWURODGRU SRVVXL
IXQFLRQDOLGDGHV TXH SHUPLWHP SURJUDPDomRRWLPL]DGDHPFRPSLODGRUHV&SRUPHLR
GRFRPSLODGRU03/$%GD0LFURFKLS
$ )LJXUD LOXVWUD R GLDJUDPD HP
EORFRVGRVGLVSRVLWLYRVGHhardwareTXHIRUDPLPSOHPHQWDGRVQR.LKRQ
2VRIWZDUH HPEDUFDGR pH[HFXWDGRSHORPLFURFRQWURODGRU$)LJXUDLOXVWUD
o diagrama do Controlador concebido.
'HYLGR j OLPLWDGD WD[D GH WUDQVIHUrQFLD VXSRUWDGD SHOR EDUUDPHQWR GH FRPXQLFDomR DGRWDGR XP VLPSOHV SURWRFROR
de comunicação foi concebido de modo a
DOFDQoDU R JUDX GH DEVWUDomR VX¿FLHQWH
SDUD JDUDQWLU D FRQHFWLYLGDGH GDV PHQVDgens entre o Sistema de Controle e o ConWURODGRU1HVWHSURWRFRORDFRPXQLFDomRp
VHPSUHLQLFLDGDSHOR6LVWHPDGH&RQWUROHH
GHYHVHULQLFLDGDH¿QDOL]DGDSRUFDUDFWHUHV
Interciência
& Sociedade
,QWHUFLrQFLD6RFLHGDGH,6619RO1
$ $3, IRL HVFULWD HP OLQJXDJHP
&XPDYH]TXHHVWDOLQJXDJHPRIHUHFH
XPD VpULH GH IDFLOLGDGHV GH FRPXQLFDomR
FRPSRUWRVGH(6HQWUDGDHVDtGDHWDPEpPSRUVHWUDWDUGHXPDOLQJXDJHPSRSXODUDOpPGHSRVVXLUXPDYDVWDEDVHGHFRnhecimento na internet.
4. TESTES E RESULTADOS
Figura 3 - 'LDJUDPD HP EORFRV GRV GLVSRVLWLYRV LPSOHPHQWDGRV
S
Início
S
Segue
Protocolo?
Mensagem?
N
Extração:
Comando e
Parâmetros
N
Mensagem
Erro
Execução
N
Envio
Resposta
S
Requer
Resposta?
S
Figura 4 - )OX[RJUDPDGR¿UPZDUHGR&RQWURODGRU
HVSHFt¿FRV 2V FRPDQGRV GHYHP FRQWHU
FDUDFWHUHVTXHFRUUHVSRQGDPDRFyGLJRGH
RSHUDomR VHJXLGR SRU SDUkPHWURV TXDQGR QHFHVViULR 3RU ¿P XPD $3, GR &RQWURODGRU GD 3ODWDIRUPD GH 5RE{ 0yYHO IRL
LPSOHPHQWDGDFRPRLQWXLWRGHLQWHUPHGLDU
H IDFLOLWDU R SURFHVVR GH FRPXQLFDomR HQtre o software de Controle e o Controlador.
(VWD$3, WHP D IXQomR GH DEVWUDLU R HQYLR
GHFRPDQGRVLQWHUSUHWDURVGDGRVGHUHVSRVWDHQYLDGRVSHOR&RQWURODGRUHDLQGDp
HQFDUUHJDGD GH HIHWXDU HYHQWXDLV FiOFXORV
H FRQYHUV}HV QHFHVViULRV SDUD D FRQ¿JXUDomR GRV GLVSRVLWLYRV GR 3,& GH PRGR D
DOLYLDUDFDUJDGHSURFHVVDPHQWRGRPLFURFRQWURODGRU XWLOL]DGR $R XWLOL]DU HVWD $3,
SDUD GHVHQYROYHU DSOLFDo}HV FRP D SODWDIRUPDQmRpQHFHVViULRFRQKHFHUDIXQGR
WRGRVRVGHWDOKHVWpFQLFRVGRVPyGXORVGH
GLVSRVLWLYRVGHhardware.
99
'RLV H[SHULPHQWRV IRUDP HODERUDGRVFRPRLQWXLWRGHDYHULJXDURVTXHVLWRV
GD SODWDIRUPD TXH PRWLYDUDP R VHX GHVHQYROYLPHQWR %XVFRXVH DLQGD DWUDYpV
GHVWHV H[SHULPHQWRV YHUL¿FDU D TXHVWmR
GD IDFLOLGDGH GH XVR GD SODWDIRUPD WDQWR
em termos de hardware como de software.
'R SRQWR GH YLVWD GH hardware RV DVSHFWRV REVHUYDGRV IRUDP VXD DGDSWDELOLGDGH
H IDFLOLGDGH GH PDQXWHQomR LPSRUWDQWHV
SULQFLSDOPHQWHHPYLVWDGRGLUHFLRQDPHQWR
GHSURSyVLWRJHUDOGDGRDHVWHWUDEDOKR-i
GRSRQWRGHYLVWDGHsoftwareRVDVSHFWRV
REVHUYDGRV IRUDP VH D SODWDIRUPD RIHUHFH
ÀH[LELOLGDGHSRUVHUGHFyGLJRDEHUWRHDLQGDLQGHSHQGHQWHGDOLQJXDJHPGHSURJUDPDomRGR6LVWHPDGH&RQWUROHMiTXHVXD
LQWHUIDFH GH FRPXQLFDomR RIHUHFH WDO SRVVLELOLGDGH3RU~OWLPRIRLDYDOLDGDDÀH[LELlidade do barramento de comunicação da
SODWDIRUPDTXDQGRVXEPHWLGDDGLIHUHQWHV
tecnologias de Sistema de Controle.
(;3(5,0(172
1HVWH SULPHLUR H[SHULPHQWR EXVFRXVHDYDOLDUDFDSDFLGDGHGDSODWDIRUPD
HPVXSRUWDUXPDDSOLFDomRHQYROYHQGRXP
HVWXGREiVLFRHKLSRWpWLFRVREUHQDYHJDomR
GHURE{VPyYHLV$TXHVWmRGDXVDELOLGDGH
GD $3, FRQFHELGD SDUD D SODWDIRUPD WDPEpP IRL YHUL¿FDGD 3DUD WDO IRL HODERUDGR
XP H[SHULPHQWR SDUD YHUL¿FDU D FDSDFLGDGHGDSODWDIRUPDGHQDYHJDUDWUDYpVGHXP
DPELHQWH UHVSRQGHQGR DRV HVWtPXORV GR
DPELHQWHHPWHPSRUHDOTXDQGRFRQWURODGRGHIRUPDUHPRWD8PGRVDVSHFWRVTXH
WDPEpP SRGH VHU REVHUYDGR QHVWH H[SHULPHQWRpVHDGLVSRVLomRGRVVHQVRUHVHGRV
DWXDGRUHV HVFROKLGRV H LPSOHPHQWDGRV QR
URE{PyYHORWRUQDFDSD]GHVHORFRPRYHU
H QDYHJDU GH IRUPD DSURSULDGD DWUDYpV GR
VHXDPELHQWHGHDSOLFDomR1HVWHVHQWLGR
Interciência
& Sociedade
,QWHUFLrQFLD6RFLHGDGH,6619RO1
FRPRWDUHIDHVFROKLGDSDUDRH[SHULPHQWR
IRLGHWHUPLQDGRTXHRURE{GHYHULDQDYHJDU
SHORDPELHQWHVHJXLQGRXPDSDUHGHHHYLWDQGRFROLV}HV$DYHULJXDomRVHGHXWHQGR
FRPREDVHRFRPSRUWDPHQWRGRURE{PyYHO
Kihon ao interagir com o ambiente.
(VWHH[SHULPHQWRIRLUHDOL]DGRHPSUHJDQGRXPQRWHERRNDWXDQGRFRPRXPD
EDVHFRPSXWDFLRQDOUHPRWDHVXDFRPXQLFDomRVHP¿RIRLHVWDEHOHFLGDSRUPHLRGH
PyGXORV ;EHH (VWH H[SHULPHQWR EXVFRX
DSUR[LPDUVH GDV FRQGLo}HV XVXDLV QDV
TXDLV SRU H[HPSOR DOXQRV XWLOL]DP VHXV
FRPSXWDGRUHV SHVVRDLV SDUD GHVHQYROYHU
H[SHULPHQWRVHQYROYHQGRWpFQLFDVGHQDYHJDomRHORFRPRomRGHURE{VPyYHLV$EDVH
FRPSXWDFLRQDO UHPRWD H[HFXWD R software
GR 6LVWHPD GH &RQWUROH HP XP FRPSXWDGRUFXMRVLVWHPDRSHUDFLRQDO pR0LFURVRIW
:LQGRZV &RPSXWDGRUHV SHVVRDLV HP
HVSHFLDORVQRWHERRNVHPFRQMXQWRFRPR
VLVWHPD RSHUDFLRQDO GD SODWDIRUPD :LQGRZVFRVWXPDPVHUIDPLOLDUHVQDPDLRUSDUWH
dos usuários, tornando tais ambientes uma
DOWHUQDWLYDFRPXPSDUDRGHVHQYROYLPHQWR
de software VHMD SRU SDUWH GRV XVXiULRV
FRPRDOXQRVRXSHVTXLVDGRUHV2software
GHQDYHJDomRGRH[SHULPHQWRIRLHVFULWRHP
&XPDYH]TXHD$3,GR&RQWURODGRUMi
KDYLD VLGR FRQFHELGD DQWHULRUPHQWH QHVVD
OLQJXDJHP$OpPGLVVRR&VHDSUHVHQWD
IUHTXHQWHPHQWH FRPR XPD OLQJXDJHP GLGiWLFD QR GHVHQYROYLPHQWR GH DOJRULWPRV
VHQGRFRPXPHPGLVFLSOLQDVGDJUDGXDomR
HWDPEpPFRPROLQJXDJHPSDUDGHVHQYROYLPHQWRGHsoftware.
3DUDUHDOL]DUHVWHH[SHULPHQWRIRL
XWLOL]DGR XP VHQVRU GH GLVWkQFLD 6RQDU
DFRSODGRDRVHUYRPRWRUSDUDUHDOL]DUDYDUUHGXUDGDSDUWHIURQWDOGRURE{PyYHOHDX[LOLDGRSHORVWUrVVHQVRUHVGHSUR[LPLGDGH
IURQWDLV$)LJXUDLOXVWUDDYLVWDVXSHULRUGR
.LKRQHDGLVSRVLomRGRVVHQVRUHVIURQWDLV
GHSUR[LPLGDGHVRQDUHGRVHUYRPRWRU
$ DUTXLWHWXUD GH FRQWUROH FRQFHELGDSDUDRH[SHULPHQWRVHHQTXDGUDQDDUTXLWHWXUD GH VXERUGLQDomR RX VXEVXQomR
DSUHVHQWDGD SRU [2,5] FDUDFWHUtVWLFD GR
SDUDGLJPD FRPSRUWDPHQWDO XPD YH] TXH
EDVHLDVH QR FRPSRUWDPHQWR REVHUYDGR
HP DQLPDLV$ SDUWLU GLVVR XP VLPSOHV DOJRULWPRGHVHJXLUSDUHGHIRLLPSOHPHQWDGR
1HVWHDOJRULWPRXPDVpULHGHPHGLo}HV
100
Figura 5 -'LVSRVLomRGRVVHQVRUHVGR.LKRQ
XWLOL]DGRVQR([SHULPHQWR
GRVRQDUpFROHWDGDDRORQJRGRVJUDXV
VHQGR XPD PHGLomR D FDGD JUDXV GD
SDUWHIURQWDOGDEDVHGRURE{PyYHO.LKRQ
O direcionamento do Sonar foi realizado
XWLOL]DQGR R VHUYRPRWRU (VVDV PHGLo}HV
VmR IHLWDV GH PRGR D GHWHFWDU D SUHVHQoD
GD SDUHGH HP FRQMXQWR FRP OHLWXUDV GRV
VHQVRUHV GH SUR[LPLGDGH QD GHWHFomR GH
uma colisão frontal iminente. Os sensores
GHSUR[LPLGDGHVDX[LOLDUDPQDGHWHFomRGH
FROLV}HVLPLQHQWHVQRVFDVRVHPTXHRVRQDU XWLOL]DGR QmR IRL FDSD] GH GHWHFWDU RV
REVWiFXORV$YHORFLGDGHGHWUDomRGRVPRWRUHVIRLFRQWURODGDSRUPRGXODomRGHODUJXUDGHSXOVR±3:0
$ SDUWLU GDV PHGLo}HV OHYDQWDGDV
SHORV VHQVRUHV R .LKRQ IRL FDSD] GH QDYHJDUDWUDYpVGRDPELHQWHDFRPSDQKDQGR
D SDUHGH HQFRQWUDGD 2 WHPSR GH UHVSRVWD GR VLVWHPD SURFHVVDPHQWR H FRPXQLFDomR PpGLR GH DSUR[LPDGDPHQWH PV
QmR FRPSURPHWHX D UHDWLYLGDGH GR .LKRQ
/RJR R URE{ PyYHO IRL FDSD] GH FXPSULU
R REMHWLYR GR H[SHULPHQWR 4XDQWR j $3,
GR FRQWURODGRU XWLOL]DGR HVWH IRL FDSD] GH
RIHUHFHUDFHVVRDRVPyGXORVGHhardware
LPSOHPHQWDGRVQR.LKRQGHIRUPDGHVFRPSOLFDGD
(;3(5,0(172
2VHJXQGRH[SHULPHQWRWHYHFRPR
REMHWLYRDYHULJXDUDFDSDFLGDGHGDSODWDIRUPDHPRIHUHFHUVXSRUWHDXPDDSOLFDomRH
TXHQHVWHFDVRIRLEDVHDGDHPXPWUDEDOKRUHDOL]DGRSRU[9], onde os autores coleWDUDPHHVWXGDUDPDXPLGDGHUHODWLYDGRDU
Interciência
& Sociedade
,QWHUFLrQFLD6RFLHGDGH,6619RO1
GHQWURGHXPDHVWXIDDJUtFROD$HVWXIDWHYH
VXDiUHDPDSHDGDHGLYLGLGDHPSRQWRV
GHPHGLomR'HPRGRDVHREWHUVXDYDULDELOLGDGH HVSDFLDO FDGD XP GHVVHV SRQWRV
WLYHUDP VXDV PHGLo}HV FROHWDGDV PDQXDOmente em três diferentes alturas em relação
DRVRORVHQGRHVWDVFPFPH
cm, em três horários ao longo do dia. NesVH FRQWH[WR IRL DWULEXtGR DR URE{ PyYHO D
PLVVmRGHH[HFXWDUXPDWDUHIDHPXPFHnário similar, seguindo um circuito determiQDGRFRPOLQKDVSUHWDVQRFKmRHFROHWDQGR
DPRVWUDVGHWHPSHUDWXUDHPWUrVGLIHUHQWHV
DOWXUDV H HP GHWHUPLQDGRV SRQWRV GH VHX
SODQR GH QDYHJDomR $ SDUWLU GRV GDGRV
OHYDQWDGRV p SRVVtYHO SRU H[HPSOR ID]HU
XP OHYDQWDPHQWR HVSDFLDO GD YDULDomR GH
WHPSHUDWXUDGHXPDHVWXIDRXXPDPELHQWHTXDOTXHUHPGLIHUHQWHVFRQGLo}HVFRPR
KRUiULRVHVWDo}HVFOLPDWL]Do}HVHWF
$GLFLRQDOPHQWH HVWH H[SHULPHQWR
IRL HODERUDGR EXVFDQGR DYDOLDU D ÀH[LELOLGDGHGDSODWDIRUPDGHURE{PyYHOHPWHUmos de tecnologias de sistemas de controle
H VXD XVDELOLGDGH 3DUD WDO HPSUHJRXVH
XP $UGXLQR 8QR 5 SDUD UHDOL]DU R 6LVWHma de Controle. O sistema de controle foi
HPEDUFDGRQRURE{PyYHO¿[DQGRRVREUH
RVXSRUWHGRURE{PyYHO.LKRQ(SRUPHLR
GHVHXSRUWRVHULDOR$UGXLQRIRLFRQHFWDGR
GLUHWDPHQWHjLQWHUIDFHGHFRPXQLFDomRGR
URE{PyYHO.LKRQ
3DUD D UHDOL]DomR GHVWH H[SHULPHQWRWUrVVHQVRUHVGHWHPSHUDWXUDIRUDP
DGLFLRQDGRVDRURE{PyYHOGHPRGRTXHR
SHUPLWDFROHWDUDPRVWUDVGHWHPSHUDWXUDGR
DPELHQWHHPWUrVDOWXUDVGLIHUHQWHVDSDUWLU
GRVROR3DUDLVVRXPDFROXQDGHDOXPtQLR
IRL¿[DGDVREUHRVXSRUWHGDSODWDIRUPDGR
.LKRQHFDGDVHQVRUIRL¿[DGRQDFROXQDGH
PRGRTXHVXDSRVLomRHPUHODomRDRVROR
FRUUHVSRQGD jV DOWXUDV GH FP FP H
FP UHVSHFWLYDPHQWH $V VDtGDV GRV
VHQVRUHVGHWHPSHUDWXUDIRUDPFRQHFWDGDV
jVHQWUDGDVGRFRQYHUVRU$'GR$UGXLQR
$ GLVSRVLomR GRV GLVSRVLWLYRV GH
KDUGZDUH XWLOL]DGRV QHVWH H[SHULPHQWR QR
Kihon são mostrados na Figura 6.
Para seguir o traçado do circuito,
XPSDUGHVHQVRUHVySWLFRUHÀH[LYRVVHQVRUHVSDUDVHJXLUOLQKDIRUDPHPSUHJDGRV
SDUDHIHWXDUHPDOHLWXUDGDYDULDomRGDFRloração do solo. O circuito foi marcado com
101
Figura 6 -'LVSRVLomRGRVGLVSRVLWLYRV
XWLOL]DGRVQR([SHULPHQWR
XPD ¿WD GH FRU SUHWD VREUH R FKmR GH FRU
FODUDEUDQFD2FLUFXLWRLQFOXLFXUYDVVHP
ELIXUFDo}HV H GHPDUFDo}HV LQGLFDQGR RV
ORFDLVGHFROHWDGHWHPSHUDWXUD
2 WUDoDGR GR FLUFXLWR p PRVWUDGR
QD)LJXUD
$ SDUWLU GDV PHGLo}HV FROHWDGDV
SHORVVHQVRUHVHPSUHJDGRVSDUDVHJXLUOL-
Figura 7 - 9LVWDVXSHULRUGRFLUFXLWRHODERUDGR
SDUDVHUSHUFRUULGRSHOR.LKRQ
QKD R URE{ IRL FDSD] GH VHJXLU R WUDoDGR
PDUFDGRHIHWXDQGRPHGLo}HVGHWHPSHUDWXUDQRVORFDLVGHWHUPLQDGRV2VYDORUHVGH
WHPSHUDWXUD PHGLGRV HP FDGD ORFDO IRUDP
transmitidos a uma base de coleta de dados
UHPRWDDWUDYpVGHPyGXORV;EHH3DUDDUHFHSomRGHVVHVGDGRVIRLXWLOL]DGRRXWURPyInterciência
& Sociedade
,QWHUFLrQFLD6RFLHGDGH,6619RO1
GXOR;EHHFRQHFWDGRDXPQRWHERRNRQGH
um software¿FRXUHVSRQViYHOSRUDUPD]HQDURVGDGRVUHFHELGRVHPXPDUTXLYRGH
UHJLVWUR$SURJUDPDomRGHVWDDSOLFDomRIRL
FRQFHELGDHP&HHQWmRDGDSWDGDSDUDR
ambiente Arduino.
4XDQWRjFDSDFLGDGHHPRIHUHFHU
VXSRUWH DRV H[SHULPHQWRV YROWDGRV j SHVTXLVDRURE{PyYHOIRLFDSD]GHID]HUXVR
DGHTXDGRGHVHXVVHQVRUHVGHVRORDRVHJXLU FRUUHWDPHQWH R WUDoDGR HVWLSXODGR H
HPFRQMXQWRFRPVHQVRUHVDFRSODGRVGLUHWDPHQWHjSODWDIRUPDGHFRQWUROHUHDOL]DGD
SHOR$UGXLQRDDSOLFDomRIRLFDSD]GHUHDOL]DUDVPHGLo}HVGHWHPSHUDWXUDQRVGHWHUPLQDGRVSRQWRVGRSODQRGHQDYHJDomR
(VVD FDSDFLGDGH GD SODWDIRUPD GH DWXDU
FRPRXPDEDVHGHURE{PyYHORWRUQDDSWR
D VXSRUWDU LQLFLDWLYDV SUiWLFDV HQYROYHQGR D UREyWLFD PyYHO XPD YH] TXH RIHUHFH
IXQFLRQDOLGDGHV HVVHQFLDLV GH QDYHJDomR
ORFRPRomRHDLQGDVXDDUTXLWHWXUDGHhardware DEHUWD R SRVVLELOLWD RSHUDU HP FRQMXQWR FRP GLVSRVLWLYRV DGLFLRQDLV H[WHUQRV
1HVWH FDVR WDLV GLVSRVLWLYRV IRUDP D EDVH
de coleta de dados remota e os três sensoUHV GH WHPSHUDWXUD FRQHFWDGRV GLUHWDPHQte ao Sistema de Controle. No entanto, em
RXWURFHQiULRGHDSOLFDomRSRGHULDWHUVLGR
XPDFkPHUDGHYtGHRRXXPPyGXOR*36
5. CONCLUSÕES GERAIS
3DUD D FRQFHSomR GD SODWDIRUPD
GHURE{PyYHODSUHVHQWDGDIRUDPFRQVLGHUDGRV DVSHFWRV FRPR VLPSOLFLGDGH H EDL[R
custo, de modo a tornar seu uso mais acesVtYHO H PRWLYDGRU$ SODWDIRUPD DSUHVHQWDGDIRLDYHULJXDGDDWUDYpVGDFRQFHSomRGR
URE{PyYHO.LKRQ3RUDSUHVHQWDUXPDVROXomRGHEDL[RFXVWRRhardwareLPSOHPHQWDGRQRURE{PyYHO.LKRQDSUHVHQWDSRXFRV
FRPSRQHQWHVFRPRVHQVRUHVHDWXDGRUHV
TXHSRGHPVHUHQFRQWUDGRVVHPGL¿FXOGDGHQRPHUFDGRGHPRGRTXHDUHSOLFDomR
GDSODWDIRUPDDSUHVHQWDGDSRGHVHUHIHWXada facilmente.
A interface de comunicação adoWDGD PRVWURXVH VX¿FLHQWH SDUD UHDOL]DU D
FRPXQLFDomR GH GDGRV HQWUH D SODWDIRUPD
e o softwareGHFRQWUROHVHPFRPSURPHWHU
VXDUHDWLYLGDGH$SHVDUGDVHYLGHQWHVOLPLWDo}HV WUD]LGDV FRP D HVFROKD GH XP SD-
102
GUmR OHJDWyULR R UHVXOWDGR VDWLVIDWyULR VH
GHXHPYLUWXGHGRVLPSOHVSURWRFRORGHFRPXQLFDomRHWDPEpPFRPDDEVWUDomRGDV
UHTXLVLo}HV H GRV GDGRV$OpP GLVVR DWULEXLQGRj$3,GR&RQWURODGRUDWDUHIDGHHIHWXDUFiOFXORVHFRQYHUV}HVSHUPLWLXDOLYLDUD
FDUJDGHSURFHVVDPHQWRVREUHRPLFURFRQWURODGRURWLPL]DQGRVHXWHPSRGHUHVSRVWD
DRVFRPDQGRVUHTXLVLo}HVGHFRQWUROH$
interface de comunicação adicional ofereciGDSRUPHLRGHXPVHJXQGRFRQHFWRUItVLFR
PRVWURX VHU XPD DOWHUQDWLYD LQWHUHVVDQWH
SDUD FRQH[mR GH GLVSRVLWLYRV TXH QmR XWLOL]DP R SDGUmR GH FRQHFWRU '% DOpP GH
RIHUHFHURSo}HVSDUDDOLPHQWDomRGHGLVSRVLWLYRVGHEDL[DSRWrQFLD
$WUDYpVGRVUHVXOWDGRVREWLGRVQRV
H[SHULPHQWRVpSRVVtYHOFRQFOXLUTXHDSODWDIRUPD FRQFHELGD QHVWH WUDEDOKR p FDSD]
GHVHDSUHVHQWDUFRPRXPDDOWHUQDWLYDYLiYHOSDUDIDFLOLWDURGHVHQYROYLPHQWRGHDSOLFDo}HVJHUDLVHQYROYHQGRDUREyWLFDPyYHO
SRGHQGRDLQGDVHUGHVWLQDGDDRXVRGLGiWLFRRXFLHQWt¿FR&RPDDGRomRGHFRQFHLWRV
VLPSOHVHRHPSUHJRGHXPQ~PHURUHGX]LGR GH FRPSRQHQWHV p SRVVtYHO REWHU XPD
SODWDIRUPD GH URE{ PyYHO TXH DSUHVHQWD
GHQWURGHVXDVOLPLWDo}HVXPFHUWRJUDXGH
ÀH[LELOLGDGH H DLQGD RIHUHFH UHFXUVRV GH
PRGRDWRUQiODIXQFLRQDOSDUDH[HFXomRGH
DSOLFDo}HV HQYROYHQGR ORFRPRomR H QDYHJDomRGHURE{VPyYHLV
6. REFERÊNCIAS BIBLIOGRÁFICAS
[1] %/$1. ' .80$5 ' 0(('(1 /<$1&2 +
Pyro: a Python-based versatile programming environment for teaching robotics -RXUQDO RQ (GXFDWLRQDO
5HVRXUFHVLQ&RPSXWLQJYQGH]
[2] %522.6 5$ $ robusted layered control system for a mobile robot,(((-RXUQDORI5RERWLFVDQG
$XWRPDWLRQY5$QPDU
[3] %58<1,1&.; + 2pen robot control software:
the 252&26 proMect3URFHHGLQJV,&5$,(((
,QWHUQDWLRQDO&RQIHUHQFHRQ,(((YS
[4] *(5.(< % 9$8*+$1 5 +2:$5' $ The
Player/Stage project: tools for multi-robot and distributed sensor systems3URFHHGLQJVWK,QWHUQDWLRQDO
&RQIHUHQFHRQ$GYDQFHG5RERWLFVMXQS
[5] 0$7$5,û 0 - The robotics primer >6O@ 0,7
3UHVV
Interciência
& Sociedade
,QWHUFLrQFLD6RFLHGDGH,6619RO1
[6] 0(57(1 0 *5266 +0 +ighly adaptable
hardware architecture for scienti¿c and industrial mobile robots3URFHHGLQJVRI,(((&RQIHUHQFHRQ
5RERWLFV$XWRPDWLRQDQG0HFKDWURQLFV5$0
S
[7]0853+<5,ntroduction to $, robotics>6O@0,7
3UHVV
103
[8] 6$5$1/, 8 $YFL $ g]WUN 0& $ modular
real-time ¿eldbus architecture for mobile robotic platforms ,((( 7UDQVDFWLRQV RQ ,QVWUXPHQWDWLRQ DQG
0HDVXUHPHQWYPDU
[9] 92/7$1 ' 6 %$5%26$ 5 = 0$57,16 -
(03=,0%$&.&5/$nilise da distribuiomo
espacial da temperatura do ar em uma casa de vegetaomo,,6LPSyVLRGH*HRHVWDWtVLWLFD$SOLFDGDHP
&LrQFLDV$JUiULDVPDL
Interciência
& Sociedade
,QWHUFLrQFLD6RFLHGDGH,6619RO1
Takao MatsumurapJUDGXDGRHP%DFKDUHODGRHP&LrQFLDGD&RPSXWDomRSHOD8QLYHUVLGDGH(VWDGXDO3DXOLVWD
-~OLR GH 0HVTXLWD )LOKR 81(63 FDPSXV GH %DXUX 3RVVXL 0HVWUDGR HP &LrQFLD GD &RPSXWDomR SHOD
8QLYHUVLGDGH(VWDGXDO3DXOLVWD-~OLRGH0HVTXLWD)LOKR81(63FDPSXVGH6mR-RVpGR5LR3UHWR3RVVXL
LQWHUHVVHHPSHVTXLVDVQDiUHDGH5REyWLFD
Humberto Ferasoli FilhopJUDGXDGRHP(QJHQKDULD&LYLOSHOD)XQGDomR(GXFDFLRQDOGH%DXUXSRVVXL
0HVWUDGRHP&LrQFLDGD&RPSXWDomRSHOD8QLYHUVLGDGH)HGHUDOGH 6mR&DUORVH'RXWRUDGRHP(QJHQKDULD(OpWULFDSHOD(VFROD3ROLWpFQLFDGD8QLYHUVLGDGHGH6mR3DXOR$WXDOPHQWHpSURIHVVRUDVVLVWHQWH
GRXWRUGR'HSDUWDPHQWRGH&RPSXWDomRGD)DFXOGDGHGH&LrQFLDVGRFDPSXVGH%DXUXGD8QLYHUVLGDGH(VWDGXDO
3DXOLVWD-~OLRGH0HVTXLWD)LOKR81(63&RRUGHQDR*UXSRGH,QWHJUDomRGH6LVWHPDVH'LVSRVLWLYRV,QWHOLJHQWHV
*,6',$WXDQDiUHDGH5REyWLFDHVSHFL¿FDPHQWHFRPDUTXLWHWXUDVGHFRQWUROHGHURE{VPyYHLVDXW{QRPRVFRP
IRFRHPUREyWLFDVRFLDORX³DVVLVWLYD´HHPHGXFDomR
Norian MarranghellopJUDGXDGRHP(QJHQKDULD(OHWU{QLFDSHOD3RQWLItFLD8QLYHUVLGDGH&DWyOLFDGR5LR*UDQGH
GR6XOSRVVXL0HVWUDGRHP(QJHQKDULD(OpWULFDSHOD8QLYHUVLGDGH(VWDGXDOGH&DPSLQDV'RXWRUDGR HP (QJHQKDULD (OpWULFD SHOD 8QLYHUVLGDGH (VWDGXDO GH &DPSLQDV 3yVDoutorado em Sistemas
GH&RPSXWDomRSHOD8QLYHUVLGDGHGH$DUKXVQD'LQDPDUFDH/LYUH'RFrQFLDHP6LVWHPDV'LJLWDLVSHOD
8QLYHUVLGDGH (VWDGXDO 3DXOLVWD $WXDOPHQWH p 3URIHVVRU 7LWXODU GD 8QLYHUVLGDGH (VWDGXDO 3DXOLVWD 7HP
H[SHULrQFLDQDViUHDVGH(QJHQKDULD(OpWULFDHGH&LrQFLDGD&RPSXWDomRFRPrQIDVHHP6LVWHPDV'LJLWDLV
DWXDQGRSULQFLSDOPHQWHQRVVHJXLQWHVWHPDVVLVWHPDVGLJLWDLVLQWHJUiYHLVPRGHODJHPHVLPXODomRGHVLVWHPDV
DUTXLWHWXUDVUHFRQ¿JXUiYHLVUHGHVGH3HWULHVtQWHVHGHVLVWHPDVGLJLWDLV
104
Interciência
& Sociedade
Baixar