Hidrodinâmica e Propulsão
Engenharia de Máquinas Marı́timas
Jorge Trindade
ENIDH
2012
Índice
1 Introdução
1.1 Geometria do navio . . . . . . . . . . . .
1.1.1 Principais dimensões dos navios .
1.1.2 Coeficientes de forma do navio .
1.2 Comportamento hidrodinâmico do navio
1.3 Métodos empı́ricos . . . . . . . . . . . .
1.4 Métodos experimentais . . . . . . . . . .
1.5 Simulações numéricas . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
1
3
6
6
7
8
2 Resistência
2.1 Análise dimensional . . . . . . . . . . . . . . .
2.2 Leis da semelhança . . . . . . . . . . . . . . . .
2.2.1 Semelhança geométrica . . . . . . . . .
2.2.2 Semelhança cinemática . . . . . . . . .
2.2.3 Semelhança dinâmica . . . . . . . . . .
2.3 Decomposição da resistência . . . . . . . . . . .
2.3.1 Resistência de onda . . . . . . . . . . .
2.3.2 Resistência de atrito . . . . . . . . . . .
2.3.3 Resistência viscosa de pressão . . . . . .
2.4 Ensaios de resistência em tanques de reboque .
2.5 Cálculo da resistência . . . . . . . . . . . . . .
2.5.1 Métodos de extrapolação . . . . . . . .
2.5.2 Resistências adicionais . . . . . . . . . .
2.6 Previsão com dados sistemáticos ou estatı́sticos
2.7 Ensaios à escala real . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
13
13
14
14
15
15
18
19
24
25
26
27
27
31
32
34
3 Propulsão
3.1 Sistemas de propulsão . . . . . . . .
3.1.1 Hélices . . . . . . . . . . . . .
3.1.2 Outros meios de propulsão .
3.2 Hélices propulsores . . . . . . . . . .
3.2.1 Geometria do hélice . . . . .
3.2.2 Valores caracterı́sticos . . . .
3.3 Teoria da quantidade de movimento
3.3.1 Força propulsiva . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
35
35
35
37
40
40
41
42
42
.
.
.
.
.
.
.
.
i
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ii
ÍNDICE
3.4
3.5
3.6
3.7
3.8
3.3.2 Coeficiente de carga . . . . . . . . . . . . . . . . . .
3.3.3 Rendimento ideal do hélice . . . . . . . . . . . . . .
Ensaios com modelos reduzidos de hélices . . . . . . . . . .
3.4.1 Diagrama em águas livres . . . . . . . . . . . . . . .
3.4.2 Rendimento . . . . . . . . . . . . . . . . . . . . . . .
3.4.3 Índice de qualidade . . . . . . . . . . . . . . . . . . .
Séries sistemáticas . . . . . . . . . . . . . . . . . . . . . . .
3.5.1 Série sistemática de Wageningen . . . . . . . . . . .
3.5.2 Outras séries sistemáticas . . . . . . . . . . . . . . .
3.5.3 Diagrama de 4 quadrantes . . . . . . . . . . . . . . .
Cavitação . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6.1 Origem da cavitação . . . . . . . . . . . . . . . . . .
3.6.2 Controle da cavitação . . . . . . . . . . . . . . . . .
3.6.3 Consideração da cavitação na selecção do hélice . . .
3.6.4 Ensaios experimentais . . . . . . . . . . . . . . . . .
Selecção do hélice . . . . . . . . . . . . . . . . . . . . . . . .
3.7.1 Variáveis de optimização . . . . . . . . . . . . . . . .
3.7.2 Tipos de problema . . . . . . . . . . . . . . . . . . .
Interacção entre casco e hélice . . . . . . . . . . . . . . . . .
3.8.1 Ensaios de propulsão . . . . . . . . . . . . . . . . . .
3.8.2 Potência e velocidade . . . . . . . . . . . . . . . . .
3.8.3 Extrapolação dos resultados do ensaio de propulsão
4 Instalações Propulsoras
4.1 Introdução . . . . . . . . . . . . . .
4.2 Propulsão diesel-mecânica . . . . . .
4.2.1 Accionamento de auxiliares .
4.2.2 Engrenagens redutoras . . . .
4.2.3 Configuração ”pai-e-filho” . .
4.3 Propulsão diesel-eléctrica . . . . . .
4.3.1 Propulsão por motor eléctrico
4.3.2 Propulsores azimutais . . . .
4.4 Selecção do motor . . . . . . . . . .
4.4.1 Turbinas e motores eléctricos
4.4.2 Motores diesel . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
44
45
45
46
46
47
47
48
49
51
53
53
54
55
56
58
58
60
60
61
62
66
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
67
67
69
70
71
73
74
74
77
78
79
79
Índice Remissivo
83
A Previsão Baseada nos Ensaios de Propulsão
87
B Provas de velocidade e Potência
121
C Condições das Provas de Velocidade e Potência
133
D Selecção de Motores Propulsores
141
E Derating
175
Lista de Figuras
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
1.10
1.11
1.12
1.13
1.14
Plano de flutuação, longitudinal e transversal de um navio. . . . .
Plano geométrico de um navio. . . . . . . . . . . . . . . . . . . . .
Principais dimensões dos navios. . . . . . . . . . . . . . . . . . . .
Marcação no costado das linhas de carga do navio. . . . . . . . . .
Tanque de provas utilizado por W. Froude. . . . . . . . . . . . . .
Tanque de testes actual. . . . . . . . . . . . . . . . . . . . . . . . .
Bacia para testes com ondulação. . . . . . . . . . . . . . . . . . . .
Bacia para testes com águas geladas. . . . . . . . . . . . . . . . . .
Escoamento num hélice. . . . . . . . . . . . . . . . . . . . . . . . .
Malha colocada à esquerda e desfasada à direita. . . . . . . . . . .
Representação esquemática de um “PC-cluster”. . . . . . . . . . . .
Um “PC-cluster” com 24 nós computacionais. . . . . . . . . . . . .
Decomposição 1D, 2D ou 3D do domı́nio espacial de um problema.
Troca de valores nas fronteiras dos sub-domı́nios. . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
4
5
7
7
8
8
8
9
10
10
11
11
Decomposição da resistência. . . . . . . . . . . . . . . . . . . . . . . . . . .
Sistema de ondas gerado por um ponto de pressão em movimento. . . . . .
Sistemas de ondas da proa e da popa. . . . . . . . . . . . . . . . . . . . . .
Interacção entre os dois sistemas de ondas. . . . . . . . . . . . . . . . . . . .
Curva da resistência de onda. . . . . . . . . . . . . . . . . . . . . . . . . . .
Variação do coeficiente da resistência de atrito com o número de Reynolds
com a rugosidade da superfı́cie. . . . . . . . . . . . . . . . . . . . . . . . . .
2.7 Distribuição de pressão num escoamento ideal, invı́scido. . . . . . . . . . . .
2.8 Modelo à escala reduzida para ensaios de resistência. . . . . . . . . . . . . .
cT
F r4
2.9 Representação gráfica da dependência de
com
. . . . . . . . . . . .
cF 0
cF 0
2.10 Redução de velocidade (%) em águas pouco profundas. . . . . . . . . . . . .
.
.
.
.
.
e
.
.
.
.
.
.
.
.
19
20
21
22
23
3.1
3.2
3.3
3.4
3.5
3.6
3.7
.
.
.
.
.
.
.
2.1
2.2
2.3
2.4
2.5
2.6
Hélice com tubeira. . . . . . . . . . . . . . .
Hélices de passo fixo e de passo controlável.
Hélices em contra-rotação. . . . . . . . . . .
Hélices supercavitante. . . . . . . . . . . . .
Propulsão por jacto de água. . . . . . . . .
Propulsores azimutais. . . . . . . . . . . . .
Propulsores cicloidais. . . . . . . . . . . . .
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 25
. 26
. 27
. . 29
. . 33
.
.
.
.
.
.
.
36
36
37
38
38
39
39
iv
LISTA DE FIGURAS
3.8
3.9
3.10
3.11
3.12
3.13
3.14
3.15
3.16
3.17
3.18
3.19
3.20
3.21
Geometria do hélice. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Distribuição espacial de velocidade e pressão para a teoria da quantidade de
movimento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Diagrama de águas livres. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Aspecto geométrico das pás da série B de Wageningen . . . . . . . . . . . . . .
Diagrama em águas livres de um hélice da série sistemática de Wageningen. . .
Notação do diagrama com 4 quadrantes. . . . . . . . . . . . . . . . . . . . . . .
Diagrama em águas livres de 4 quadrantes para os hélices Wageningen B-4.70.
Efeito da cavitação no valor dos parâmetros relativos a águas livres. . . . . . .
Pressão de vapor da água em função da temperatura. . . . . . . . . . . . . . .
Diagrama de Burrill. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Instalações de ensaio do RINA. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Imagem da cavitação num hélice. . . . . . . . . . . . . . . . . . . . . . . . . . .
Modelo para ensaios de propulsão. . . . . . . . . . . . . . . . . . . . . . . . . .
Resultados dos ensaios de propulsão. . . . . . . . . . . . . . . . . . . . . . . . .
Variantes de instalações propulsoras diesel-mecânicas lentas e de média velocidade. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Instalações propulsoras diesel-mecânica (em cima) e diesel-eléctrica (em baixo).
4.3 Acoplamento com relação variável de velocidades. . . . . . . . . . . . . . . . . .
4.4 Conversão da frequência da energia eléctrica. . . . . . . . . . . . . . . . . . . .
4.5 Instalação propulsora com quatro motores, engrenagens redutoras e dois hélices.
4.6 Instalação com dois motores diesel diferentes, engrenagens redutoras, embraiagens e geradores acoplados aos veios. . . . . . . . . . . . . . . . . . . . . . . .
4.7 Motor eléctrico de propulsão. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8 Instalação diesel-eléctrica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.9 Representação esquemática de uma instalação diesel-eléctrica. . . . . . . . . . .
4.10 Propulsores azimutais. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.11 Diagrama de carga de um motor diesel . . . . . . . . . . . . . . . . . . . . . . .
41
43
47
48
50
51
53
54
55
56
57
58
61
66
4.1
68
69
71
72
73
74
75
76
77
78
80
Lista de Tabelas
1.1
Valores de K na fórmula de Alexander.
2.1
Valores do coeficiente de correcção cA em função do comprimento do navio. . . 29
3.1
3.2
3.3
Séries sistemáticas de propulsores. . . . . . . . . . . . . . . . . . . . . . . . . . 48
Coeficiente para atribuição do diâmetro máximo do hélice pela Eq. (3.34). . . . 59
Constante para o cálculo do diâmetro equivalente em água livres pela Eq. (3.35). 59
v
. . . . . . . . . . . . . . . . . . . . . .
6
vi
LISTA DE TABELAS
Capı́tulo
1
Introdução
1.1
Geometria do navio
A variação da proporção relativa das dimensões principais de um navio tem um importante
efeito nas suas caracterı́sticas operacionais. Afecta as suas caracterı́sticas hidrodinâmicas, a
sua resistência estrutural e, naturalmente a capacidade de carga.
Os navios existentes, em particular as unidades de construção mais recente, constituem
uma boa “fonte de inspiração” para o pré-dimensionamento de um navio novo. No que diz
respeito à informação mais detalhada, estas bases de dados são, regra geral, bem resguardadas
pelos gabinetes de estudo e projecto, bem como pelos estaleiros construtores. No entanto,
alguns destes dados estão disponı́veis nos registos publicados pelas sociedades classificadoras
e por alguns gabinetes de estudo.
Depois de um processo iterativo de dimensionamento do navio, durante o qual são tidas
em consideração as variáveis de optimização seleccionadas, a solução final da forma do navio
constitui o plano geométrico do navio. Na prática, este plano geométrico é gerado por uma
das seguintes vias:
- deformação de um navio de referência;
- modelo matemático para definição de forma em função de parâmetros do navio;
- utilização das séries sistemáticas.
1.1.1
Principais dimensões dos navios
O casco de um navio é uma forma tridimensional, na maior parte dos casos simétrica relativamente a um plano vertical longitudinal do navio. O contorno do casco fica definido pela
sua intersecção com três planos ortogonais (Fig. 1.1):
- o plano de flutuação de projecto;
- o plano longitudinal;
- o plano transversal.
1
2
CAPÍTULO 1. INTRODUÇÃO
Figura 1.1: Plano de flutuação, longitudinal e transversal de um navio.
O plano longitudinal, único plano de simetria do navio, é o plano de referência. A forma
do navio cortada por este plano é o perfil. O plano de flutuação de projecto é um plano
perpendicular ao plano longitudinal, escolhido como plano de referência. Os planos paralelos
ao plano de flutuação de projecto são conhecidos como planos de água, ou de flutuação, e as
linhas de intersecção como linhas de água. Os planos de flutuação são simétricos relativamente
ao plano longitudinal. Os planos perpendiculares ao plano longitudinal e ao plano de flutuação
de projecto são os planos transversais. As secções transversais exibem simetria relativamente
ao plano longitudinal.
A secção do navio equidistante das perpendiculares e normal aos planos de flutuação de
verão e longitudinal é designada por secção de meio-navio, ou secção mestra. Na Fig. 1.2
está representado um plano de linhas do navio, que inclui o plano do casco, no qual, por
convenção, sempre que o navio é simétrico, se exibem metades das secções. Do lado direito
representam-se metades das secções avante de meio-navio e do lado esquerdo metades das
secções a ré. O plano de linhas do navio inclui ainda o plano da metade da boca, no qual são
representados os planos de flutuação.
Figura 1.2: Plano geométrico de um navio.
1.1. GEOMETRIA DO NAVIO
3
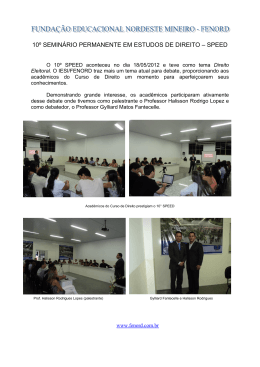
Na Fig. 1.3 estão representadas as dimensões mais frequentemente utilizadas para definir
o navio. Quanto ao comprimento do navio, são três as definições a considerar:
- o comprimento entre perpendiculares, Lpp , distância medida ao longo do plano de flutuação de verão entre a perpendicular da popa e a perpendicular da proa;
- o comprimento na linha de água, Lwl , distância na linha de flutuação que se verifique, se
nada for referido deverá entender-se a linha de flutuação de verão, entre as intersecções
da proa e popa com a mesma linha de flutuação;
- o comprimento fora a fora, Loa , distância entre os pontos extremos a vante e a ré do
navio, medida numa direcção paralela à linha de flutuação de verão.
Designa-se por boca, a máxima distância entre as faces interiores das chapas de costado
nos dois bordos do navio, na secção mestra, se outra secção não for indicada. O pontal é a
distância na vertical, medida a meio navio, entre a face inferior do convés e a face superior
da chapa da quilha. O calado de um navio em qualquer ponto do seu comprimento é a
distância na vertical entre a quilha e a linha de água. O calado varia não só com o estado de
carregamento do navio mas também com a densidade da água em que este se encontra.
A altura desde a linha de flutuação e o convés é designada por bordo livre. Pode ser
calculado pela diferença entre o pontal e o calado.
Um aspecto importante relativamente à segurança de um navio mercante prende-se com
a alocação regulamentar de um valor mı́nimo do bordo livre, como forma de garantir uma
reserva de estabilidade suficiente para a segurança da navegação. Este valor mı́nimo do bordo
livre depende do local de navegação e da época do ano. No costado do navio estão marcadas
as linhas de carga por forma a permitir verificar facilmente se as condições de segurança são
verificadas. O valor de referência é a linha de Verão que é marcada no centro de um cı́rculo,
Fig. 1.4. Ao lado deste cı́rculo, são marcadas na horizontal linhas adicionais que correspondem
ao:
- bordo livre de Inverno, superior em 1/48 avos do bordo livre de Verão;
- bordo livre de Inverno no Atlântico Norte, ainda superior em 50 mm;
- bordo livre tropical, inferior em 1/48 avos do bordo livre de Verão;
- bordo livre em água doce, inferior em ∆ / (40 t) cm, sendo ∆ o deslocamento em ton e
t as ton por cm de imersão;
- bordo livre tropical em água doce é inferior em 1/48 avos do bordo livre de Verão ao
bordo livre em água doce.
1.1.2
Coeficientes de forma do navio
O deslocamento do navio é o peso do volume de água que o navio desloca quando a flutuar
em águas tranquilas,
∆ = ρg∇
(1.1)
em que ρ é a massa volúmica da água em que o navio se encontra a flutuar, g é a aceleração
da gravidade e ∇ o volume deslocado.
A partir das principais dimensões da navio, definem-se os seguintes coeficientes de forma:
4
CAPÍTULO 1. INTRODUÇÃO
Figura 1.3: Principais dimensões dos navios.
- o coeficiente de finura total (“block coeficient”):
Cb =
∇
Lpp BT
(1.2)
onde:
- ∇ é o volume do deslocamento;
- Lpp o comprimento entre perpendiculares;
- B a boca (máxima abaixo da linha de água);
- e T é o calado médio do navio.
- o coeficiente de finura da flutuação:
Cwp =
Awp
Lwp B
em que:
- Awp é a área do plano de flutuação;
(1.3)
1.1. GEOMETRIA DO NAVIO
5
Figura 1.4: Marcação no costado das linhas de carga do navio.
- Lwp o comprimento na linha de flutuação;
- e B a boca (máxima na linha de flutuação).
- o coeficiente de finura da secção mestra:
Cm =
Am
BT
(1.4)
representando por:
- Am a área imersa na secção mestra;
- B a boca na secção mestra;
- e T o calado a meio navio.
- o coeficiente prismático longitudinal:
Cp =
∇
Am Lpp
(1.5)
em que novamente:
- ∇ é o volume da querena;
- Am a área imersa a meio navio;
- e Lpp o comprimento entre perpendiculares.
Como exemplo da utilização dos coeficientes de forma no estabelecimento de relações
empı́ricas para inı́cio do projecto de um navio, pode-se indicar a fórmula de Alexander,
V
Cb = K − 0.5 × √
L
(1.6)
em que K apresenta os valores da Tab. 1.1 de acordo com o tipo de navio. A fórmula de
Alexander estabelece uma relação empı́rica entre o coeficiente de finura total do navio, a sua
velocidade e o comprimento. Pela especificidade de cada caso, o coeficiente de finura total
Cb do navio poderá depois desviar-se do valor inicialmente previsto durante o processo de
optimização das caracterı́sticas do navio.
6
CAPÍTULO 1. INTRODUÇÃO
Tipo de Navio
Petroleiro
Graneleiro
Carga geral
Navio de linha
Ferry
Rebocador
K
1.13
1.11
1.10
1.05
1.08
1.18
Tabela 1.1: Valores de K na fórmula de Alexander.
1.2
Comportamento hidrodinâmico do navio
A análise do comportamento hidrodinâmico do navio pode ser decomposta em diversas áreas,
de entre as quais se pode salientar:
- a resistência;
- a propulsão;
- o comportamento do navio no mar;
- a capacidade de manobra.
O cálculo do escoamento e o projecto de hélices pode ser considerado como um sub-tópico do
tema resistência e propulsão.
As metodologias para o cálculo ou para a previsão dos parâmetros relevantes do comportamento do navio podem ser classificadas como:
- empı́ricas e estatı́sticas;
- experimentais em modelos à escala reduzida, ou à escala real;
- numéricas, através de soluções analı́ticas ou com recurso à mecânica de fluidos computacional.
Os princı́pios fundamentais destas metodologias são sumariamente descritos nas secções
seguintes.
1.3
Métodos empı́ricos
Os métodos empı́ricos baseiam-se num modelo fı́sico relativamente simples e na análise por
regressão para a determinação dos coeficientes relevantes, a partir de um só navio ou de uma
série de navios. Os resultados assim obtidos são depois expressos sob a forma de constantes,
fórmulas, tabelas, gráficos, etc.
Numerosos estudos realizados entre 1940 e 1960 permitiram criar séries de “boas” formas
de carenas. O efeito da variação dos principais parâmetros do casco, como por exemplo o
coeficiente de bloco, foi determinado por alteração sistemática daqueles parâmetros.
1.4. MÉTODOS EXPERIMENTAIS
Figura 1.5: Tanque de provas utilizado
por W. Froude.
1.4
7
Figura 1.6: Tanque de testes actual.
Métodos experimentais
Esta abordagem baseia-se no teste de modelos em escala reduzida para extrair informação que
possa ser extrapolada para a escala do navio. Apesar dos grandes esforços de investigação e
normalização, a correlação modelo-navio está sujeita a algum grau de empirismo. Cada uma
das principais instalações de teste (túneis, bacias, etc.) tende a adoptar os métodos de ensaio
e tratamento da informação que melhor se adaptam à experiência já incorporada nas suas
bases de dados. Esta não uniformidade de processos dificulta, se não mesmo em muitos casos
impossibilita, o aproveitamento estatı́stico dos dados de uma forma agregada.
Embora a metodologia base para a avaliação da resistência de um modelo num tanque de
testes se mantenha praticamente inalterada desde os tempos de Froude (1874), vários aspectos
técnicos sofreram grande evolução. De entre estes, podem-se salientar:
- as técnicas experimentais não-intrusivas, como a Laser-Doppler Velocimetry, que permitem a medição do campo de velocidades na esteira do navio para melhorar o projecto
do hélice;
- a análise do padrão da formação ondosa gerada pelo modelo para estimar a resistência
de onda;
- nos testes de modelos com propulsão autónoma, é possı́vel agora medir grandezas relacionadas com o propulsor como o impulso, binário, rpm, etc.
Instalações com caracterı́sticas bem diferentes surgiram entretanto para possibilitar outro
tipo de estudos. Trata-se de bacias equipadas com geradores de ondas, para ensaios de modelos
com o objectivo de estudar as questões de manobrabilidade e de comportamento do navio no
mar, Fig. 1.7.
Outro tipo de bacias para ensaios de modelos de navios, Fig. 1.8, dedica-se preferencialmente a estudos e ensaios relacionados com a presença de gelo no mar.
Por último, um outro tipo de instalação de teste nesta área dedica-se ao estudo do desempenho de hélices propulsores. Neste tipo de instalação, que iremos abordar com um pouco
mais de detalhe no Cap. 3, para além da determinação de várias caracterı́sticas de desempenho
do hélice, pode-se vizualizar o padrão de cavitação no hélice.
8
CAPÍTULO 1. INTRODUÇÃO
Figura 1.7: Bacia para testes
com ondulação.
Figura 1.8: Bacia para testes com
águas geladas.
Figura 1.9: Escoamento num hélice.
1.5
Simulações numéricas
As simulações de escoamento obtidas pela mecânica de fluidos computacional são ainda consideradas pela indústria como pouco precisas para a previsão da resistência de um casco ou da
força propulsiva de um hélice. No entanto, o contributo da mecânica de fluidos computacional
está a tornar-se cada vez mais importante em determinados passos do processo de projecto.
Casos tı́picos de aplicação são, por exemplo:
- a simulação de escoamento invı́scido, com superfı́cie livre, para análise do comportamento da proa, interacção com o bolbo, formação ondosa, etc.
- as simulações de escoamento viscoso na zona da popa, desprezando a formação ondosa
para avaliação do comportamento de apêndice ou análise do escoamento de aproximação
ao hélice.
No caso mais geral, o escoamento de fluidos incompressı́veis em regime não-estacionário é
modelado pelas seguintes equações:
1.5. SIMULAÇÕES NUMÉRICAS
9
- Equação da continuidade,
∂ui
=0
∂xi
(1.7)
- Equação de conservação da quantidade de movimento,
∂ρui
∂p
∂ 2 ui
∂
(ρui uj ) = −
+µ
+ ρbi
+
∂t
∂xj
∂xi
∂xj ∂xj
(1.8)
- Equação de conservação da energia (forma simplificada),
∂θ ∂ (θuj )
κ ∂2θ
=
+
∂t
∂xj
ρc ∂xj ∂xj
(1.9)
em que xi é a coordenada na direcção i, ui é a componente da velocidade na direcção i, ρ
e µ são a massa especı́fica e a viscosidade do fluido, respectivamente, p é a pressão, κ é a
condutividade térmica, c é o calor especı́fico, θ é a temperatura, b é a componente na direcção
i das forças exteriores por unidade de massa e t é o tempo.
As equações são discretizadas no espaço de acordo com uma malha colocada ou desfasada.
Na Fig. 1.10 está indicada a localização das variáveis, no caso bi-dimensional, para cada
uma daqueles tipos de malhas. Cada um daqueles tipos de malha de discretização apresenta
Figura 1.10: Malha colocada à esquerda e desfasada à direita.
algumas vantagens e desvantagens. As mais importantes estão relacionadas com:
- a complexidade da programação;
- o tratamento das fronteiras do problema;
- a solução para o acoplamento pressão-velocidade (formato xadrez na solução da pressão).
Selecionado o tipo de malha a utilizar, outras opções há a tomar para desenvolver o método
de solução. Algumas das mais comuns são:
10
CAPÍTULO 1. INTRODUÇÃO
Figura 1.11: Representação esquemática
de um “PC-cluster”.
Figura 1.12: Um “PC-cluster”
com 24 nós computacionais.
- SIMPLE / método de projecção;
- volume finito / diferenças finitas;
- aproximação dos termos convectivos/difusivos das equações;
- “upwind”;
- diferenças centrais de ordem 2;
- diferenças centrais de ordem 4;
- o método de integração para a evolução temporal;
- Euler;
- Crank-Nicolson;
- Adams-Bashforth;
- Runge-Kutta.
Tratando-se de cálculos complexos, o tempo de cálculo poderá ser reduzido, sem acréscimo
significativo de custos, com recurso de um “PC-cluster”, Fig. 1.11.
Este tipo de estruturas computacionais caracterizam-se por dispor de:
- 20 a 1000 CPU;
- 2 a 8 GB RAM por nó;
- comunicação em rede com velocidade superior a 1 Gbps;
- elevada capacidade para armazenamento de dados;
- sistema operativo estável.
1.5. SIMULAÇÕES NUMÉRICAS
11
Para a solução de um problema de mecânica de fluidos num “PC-cluster” é necessário proceder à decomposição do domı́nio espacial do problema (Fig. 1.13) e recorrer a rotinas de uma
das várias bibliotecas disponı́veis para efectuar a troca de dados entre os nós computacionais,
como por exemplo a biblioteca Message Passing Interface, necessária para a continuação do
cálculo. Na Fig. 1.14 estão representados esquematicamente aquelas comunicações de dados
relativos às fronteiras dos sub-domı́nios de cálculo.
Figura 1.13: Decomposição 1D, 2D ou 3D do domı́nio espacial de um problema.
Figura 1.14: Troca de valores nas fronteiras dos sub-domı́nios.
12
CAPÍTULO 1. INTRODUÇÃO
Capı́tulo
2
Resistência
2.1
Análise dimensional
A resistência do navio a uma velocidade constante é a força necessária para rebocar o navio
a essa velocidade em águas tranquilas. Se a querena não tiver apêndices, a resistência diz-se
da querena simples. Designaremos por potência efectiva, ou potência de reboque, a potência
necessária para vencer a resistência do navio a uma dada velocidade,
Pe = V RT
(2.1)
em que V é a velocidade do navio e RT a sua resistência total.
A resistência do navio RT = f (V, L, ρ, ν, g) depende:
- da velocidade do navio V ;
- das dimensões do navio, representadas aqui por uma dimensão linear L;
- da massa especı́fica do fluido ρ;
- da viscosidade cinemática do fluido ν;
- da aceleração da gravidade g.
Assim, a resistência do navio deverá ser uma função da forma
RT = V a Lb ρc ν d g e
(2.2)
Ao estudar a resistência de um navio é importante calcular não o seu valor absoluto, mas
também a sua relação com outro valor, dimensionalmente semelhante, tomado como referência. Vamos dar o nome de coeficientes especı́ficos a estas relações. No caso da resistência
total do navio, o valor do coeficiente é obtido por
cT =
RT
(2.3)
1
ρSV 2
2
em que ρ é a massa especı́fica do fluido, S a superfı́cie molhada do navio e V a sua velocidade.
13
14
CAPÍTULO 2. RESISTÊNCIA
Resolvendo o sistema de equações gerado pela Eq. (2.2) em ordem a a, b e c, e considerando
a definição do coeficiente em 2.3 dada pela Eq. (2.3), temos
V L gL
2 2
(2.4)
RT = ρV L f
,
ν V2
Ou seja, a análise dimensional mostra que o coeficiente de resistência total do navio,
V L gL
ct = f
(2.5)
,
ν V2
depende dos grupos adimensionais designados por número de Froude,
V
Fr = √
gL
(2.6)
e por número de Reynolds,
Re =
VL
ν
(2.7)
calculados para o navio.
2.2
Leis da semelhança
No caso dos ensaios de modelos para avaliação da resistência de uma querena, podemos
considerar três formas de semelhança:
- semelhança geométrica;
- semelhança cinemática;
- semelhança dinâmica.
2.2.1
Semelhança geométrica
Verificar-se semelhança geométrica significa a existência de uma razão constante entre qualquer dimensão linear na escala real do protótipo (comprimento, boca, calado do navio, etc.)
Ls e o dimensão linear na escala do modelo Lm . Aquela razão é a escala geométrica do modelo
λ,
Ls = λ Lm
(2.8)
Consequentemente, temos para as áreas,
As = λ 2 Am
(2.9)
e para os volumes,
∇s = λ 3 ∇m
(2.10)
2.2. LEIS DA SEMELHANÇA
2.2.2
15
Semelhança cinemática
A semelhança cinemática significa a existência de uma razão constante entre o “tempo” na
escala real, ts e o “tempo” na escala do modelo tm , a escala cinemática τ :
ts = τ · tm
(2.11)
A verificação simultânea das condições de semelhança geométrica e cinemática resulta nos
seguintes factores de escala:
- para a velocidade:
λ
Vm
τ
Vs =
(2.12)
- e para a aceleração:
as =
2.2.3
λ
am
τ2
(2.13)
Semelhança dinâmica
Obter semelhança dinâmica significa que a razão entre cada uma das forças actuantes no navio
à escala real e as correspondentes forças actuantes no modelo é constante, escala dinâmica do
modelo κ,
Fs = κ · Fm
(2.14)
As forças presentes, actuantes sobre o navio e sobre o modelo, podem ser classificadas de
acordo com a sua natureza como:
- as forças de inércia;
- as forças gravı́ticas;
- as forças de atrito.
Forças de inércia
As forças de inércia regem-se pela lei de Newton, expressa por
F = m·a
(2.15)
em que F é a força de inércia, m a massa do corpo, e a a aceleração a que ele é sujeito.
Considerando o volume deslocado pelo navio ∇, a massa do navio é
m = ρ·∇
(2.16)
sendo ρ a massa volúmica da água.
Então, a razão entre as forças de inércia é uma equação que incorpora os três factores de
escala, lei da Semelhança de Newton, é dada por
κ=
Fs
ρs · ∇s · as
ρs λ4
=
=
·
Fm
ρm · ∇m · am
ρm τ 2
que pode ser re-escrita como
2
Fs
λ
Vs 2
ρs
ρs As
2
κ=
=
·λ ·
=
·
·
Fm
ρm
τ
ρ m Am
Vm
(2.17)
(2.18)
16
CAPÍTULO 2. RESISTÊNCIA
Forças de origem hidrodinâmica
As forças de origem hidrodinâmica são normalmente descritas recorrendo a um coeficiente
adimensional c na seguinte forma, semelhante à Eq. (2.3),
F = c·
1
ρ·V 2·A
2
(2.19)
em que V é uma velocidade de referência, por exemplo a velocidade do navio e A uma área de
referência como, por exemplo, a área das obras vivas com mar calmo. Aplicando a Eq. (2.19)
ao navio e ao modelo e combinando as duas equações, obtem-se
cs · ρs · Vs2 · As
cs ρs As
Vs 2
Fs
=
·
·
(2.20)
=
Fm
cm · ρm · Vm2 · Am
cm ρm Am
Vm
Daqui resulta que igualando o valor dos coeficientes no navio e no modelo, cs = cm , fica
garantida a verificação da lei da semelhança de Newton.
Forças Gravı́ticas
As forças gravı́ticas podem ser descritas de forma semelhante às forças de inércia, para o
navio
Gs = ρs · g · ∇s
(2.21)
e para o modelo
Gs = ρs · g · ∇s
Gm = ρm · g · ∇m
(2.22)
daqui resultando uma nova escala,
κg =
Gs
ρs ∇s
ρs
=
·
=
· λ3
Gm
ρm ∇m
ρm
(2.23)
Para que se possa verificar a semelhança dinâmica, os factores de escala devem apresentar
o mesmo valor, ou seja, κ = κg . Se
κ=
ρs λ4
·
ρm τ 2
e
κg =
ρs
· λ3
ρm
então, para que κ = κg é necessário verificar-se
√
τ= λ
(2.24)
Esta nova relação permite eliminar a escala temporal em todas as relações apresentadas,
ficando a proporcionalidade apenas dependente de λ como, por exemplo, na Eq. (2.12), fazendo
√
Vs
= λ
Vm
(2.25)
2.2. LEIS DA SEMELHANÇA
17
Número de Froude
A Eq. (2.25) pode ainda assumir a forma de uma relação entre a dimensão linear e a
velocidade do modelo e do navio,
V
V
√s = √m
Ls
Lm
(2.26)
Adimensionalisando a razão entre a velocidade V e a raiz quadrada do comprimento L
com a aceleração da gravidade, g = 9.81 m/s2 , obtemos o número de Froude
Fr = √
V
g·L
(2.27)
Na ausência de forças viscosas, igual número de Froude assegura semelhança dinâmica.
Para igual número de Froude, as ondulações no modelo e à escala real, desde que de pequena
amplitude, podem considerar-se geometricamente semelhantes.
A lei de Froude é verificada em todos os ensaios de modelos de navios, ensaios de resistência, propulsão, comportamento no mar e manobrabilidade. A aplicação da lei de Froude
impõe os seguintes factores de escala para a velocidade,
√
Vs
= λ
Vm
(2.28)
Fs
ρs
=
· λ3
Fm
ρm
(2.29)
força,
e potência,
Fs · Vs
ρs
Ps
=
=
· λ3.5
Pm
Fm · Vm
ρm
(2.30)
Forças de atrito
As forças viscosas R, com origem no atrito entre camadas de fluido, são modeladas por
R = µ·
∂u
·A
∂n
(2.31)
∂u
em que µ é a viscosidade dinâmica do fluido, A a área sujeita ao atrito e
o gradiente de
∂n
velocidade, avaliado na direcção normal ao escoamento.
A razão das forças de atrito no navio e no modelo é dada por
Rs
κf =
=
Rm
∂us
· As
µs λ2
∂ns
=
∂um
µm τ
µm ·
· Am
∂nm
µs ·
(2.32)
Na presença das forças de atrito, para verificar a condição de semelhança dinâmica, será
necessário que κf = κ, ou seja:
µs λ 2
ρs λ4
=
µm τ
ρm τ 2
(2.33)
18
CAPÍTULO 2. RESISTÊNCIA
Se introduzirmos a viscosidade cinemática, como ν = µ/ρ, obtém-se:
λ2
νs
V s · Ls
=
=
νm
τ
Vm · Lm
ou seja,
Vs · Ls
Vm · Lm
=
νs
νm
(2.34)
Número de Reynolds
Então, de acordo com a Eq. (2.34), se apenas estiverem presentes forças de inércia e de
atrito, a igualdade do número de Reynolds,
Re =
V ·L
ν
(2.35)
assegura semelhança dinâmica entre o modelo e o navio.
Para o cálculo do número de Reynolds, a viscosidade cinemática da água do mar (m2 /s)
pode ser estimada, em função da temperatura θ (◦ C) e da salinidade s (%), por
ν = (0.014 · s + (0.000645 · θ − 0.0503) · θ + 1.75) · 10−6
Semelhança dinâmica
O número de Froude e o número de Reynolds estão relacionados por,
p
√
gL3
Re
V · L gL
=
=
Fr
ν
V
ν
(2.36)
(2.37)
A semelhança de Froude é facilmente obtida para testes em modelos porque para modelos
mais pequenos a velocidade de teste diminui. A semelhança de Reynolds é mais difı́cil de
obter pois modelos mais pequenos exigem superior velocidade de teste para igual viscosidade
cinemática.
os navios de superfı́cie estão sujeitos a forças gravı́ticas e de atrito. Assim, nos testes de
modelos à escala reduzida ambas as leis, de Froude e de Reynolds, deveriam ser satisfeitas;
s
Res
νm
L3s
νm 1.5
=
·
=
·λ = 1
(2.38)
Rem
νs
L3m
νs
No entanto, não existem, ou pelo menos não são economicamente viáveis, fluidos que permitam
satisfazer esta condição. Para diminuir os erros de extrapolação dos efeitos viscosos, a água em
que são realizados os testes pode ser aquecida para aumentar a diferença entre as viscosidades.
2.3
Decomposição da resistência
A resistência do navio tem origem complexa e, para facilidade de análise, é tradicionalmente
decomposta em vários termos. No entanto, não existe uniformidade nos diversos textos quanto
à forma como realizar aquela decomposição. Uma das abordagens a este assunto consiste
em considerar as decomposições constantes na Fig. 2.1. De acordo com a figura, podemos
considerar a seguinte decomposição da resistência total:
2.3. DECOMPOSIÇÃO DA RESISTÊNCIA
19
- a resistência de onda;
- a resistência de atrito;
- a resistência viscosa de pressão.
Figura 2.1: Decomposição da resistência.
Para além dos termos relativos a uma querena simples em águas tranquilas, outras componentes adicionais da resistência deverão ser consideradas:
- a resistência aerodinâmica, resistência ao avanço no ar da parte emersa do casco e
superestruturas do navio;
- a resistência adicional em mar ondoso, resistência resultante da acção de ondas incidentes sobre a estrutura do navio;
- a resistência adicional devida aos apêndices da querena.
2.3.1
Resistência de onda
Quando o navio avança na superfı́cie tranquila do mar é rodeado e seguido por uma formação
ondosa. Esta formação é quase imperceptı́vel a baixa velocidade. No entanto, a partir de
uma dada velocidade torna-se claramente visı́vel e, a partir daı́, tem dimensão crescente
com a velocidade. Para além da dependência com a velocidade, a formação ondosa depende
também da forma da querena.
20
CAPÍTULO 2. RESISTÊNCIA
Nos estudos de resistência de onda não se pode afirmar que uma dada velocidade é elevada
ou baixa sem conhecermos também a dimensão do navio. Assim, surge frequentemente a
referência ao conceito de velocidade relativa, como razão entre a velocidade do navio e um
parâmetro representativo da dimensão do navio,
V
vrel = √
L
(2.39)
com V em nós e L em pés, em substituição do adimensional número de Froude.
Numa perspectiva do estudo hidrodinâmico do escoamanto, o navio pode ser considerado
como um campo de pressão em movimento. Kelvin resolveu analiticamente o caso simplificado
do sistema de ondas criado pelo movimento de um ponto de pressão. Demonstrou que o padrão
da formação ondosa inclui um sistemas de ondas divergentes e um outro sistema cujas cristas
das ondas se apresentam normais à direcção do movimento, como representado na Fig. 2.2.
Ambos os sistemas de ondas viajam à velocidade do ponto de pressão.
Figura 2.2: Sistema de ondas gerado por um ponto de pressão em movimento.
O sistema de ondas associado ao movimento de um navio é bastante mais complicado.
No entanto, como primeira aproximação, o navio pode ser considerado com um campo de
pressão em movimento composto por uma sobrepressão considerada pontual na proa e uma
depressão, também pontual, na popa. Assim, num navio que se desloque a uma velocidade
relativa elevada, a formação ondosa provocada é constituı́da por dois sistemas principais de
ondas, Fig. 2.3:
- o sistema da proa;
- o sistema da popa.
Cada um dos sistemas de ondas formados, com origem na proa e na popa do navio, é
constituı́do por dois tipos de ondas:
- as ondas transversais;
- as ondas divergentes.
Geralmente, os dois sistemas de ondas divergentes são detectáveis apesar de o sistema da
popa ser muito mais fraco. Não é normalmente possı́vel isolar o sistema transversal da popa,
sendo apenas visı́vel a ré do navio a composição dos dois sistemas, transversal e divergente.
2.3. DECOMPOSIÇÃO DA RESISTÊNCIA
21
Figura 2.3: Sistemas de ondas da proa e da popa.
A proa produz um sistema de ondas semelhante ao descrito por Kelvin para um ponto de
pressão em movimento e, pelo contrário, na popa forma-se um sistema de ondas semelhante,
mas com uma depressão localizada na popa. Conforme representado na Fig. 2.3, se a linha
que une os pontos de maior elevação das cristas das ondas divergentes fizer com a direcção
longitudinal do navio um ângulo α, então a direcção destas fará um ângulo 2α com a mesma
direcção.
O comprimento de onda de ambos os sistemas transversais é igual e dado por:
λ=
2πV 2
g
(2.40)
Existe uma interacção entre as formações ondosa transversais dos sistemas de ondas da
proa e da popa. Se os sistemas estiverem “em fase”, de tal forma que as cristas das ondas
coincidam, o sistema resultante terá maior altura e, consequentemente, maior energia. Se,
pelo contrário, a cava de um dos sistemas de ondas ficar sobreposta com uma crista do outro
sistema, a energia consumida para gerar o sistema de ondas será reduzida. A velocidade V
e o comprimento do navio L são muito importantes para a determinação da energia total do
sistema de ondas gerado e, consequentemente, para a resistência de onda do navio.
Continuando a assumir o modelo fı́sico que aproxima o movimento do navio por um
campo de pressão em movimento, a distância entre os dois pontos de pressão, proa e popa,
é aproximada por 0, 9 L. Sabendo que uma onda gravı́tica com comprimento de onda λ se
desloca em águas profundas à velocidade
r
λg
C=
(2.41)
2π
para que haja coincidência de uma crista ou cava do sistema da proa com a primeira cava
gerada na popa, deverá verificar-se
V2
g
=
0, 9L
Nπ
(2.42)
Tomando em consideração a Fig. 2.4, verifica-se que as cavas vão coincidir para N =
1, 3, 5, ... enquanto que para N par as cristas do sistema da proa coincidem com as cavas do
sistema da popa. Se não existisse esta interacção entre os dois sistemas de ondas a resistência
de onda apresentaria uma evolução “bem comportada” crescente com a velocidade do navio,
22
CAPÍTULO 2. RESISTÊNCIA
Figura 2.4: Interacção entre os dois sistemas de ondas.
conforme representado pela linha tracejada da Fig. 2.5. Na realidade, a partir de uma dada
velocidade a partir da qual esta interacção se torna significativa, verifica-se a existência de
elevações e depressões na curva correspondendo aos casos extremos de interacção entre os
sistemas de ondas. É de esperar que a maior elevação se verifique para N = 1 porque a
velocidade é mais elevada para esta condição.
Como a curva de resistência de onda exibe estes máximos e mı́nimos locais, o navio deve
ser projectado para operar num mı́nimo local da curva de resistência de onda, a velocidade
económica.
Quando o comprimento de onda das ondas transversais é igual ao comprimento do navio, o número de Froude é aproximadamente 0, 4. Até este valor do número de Froude, as
ondas transversais são as principais responsáveis pelas elevações e depressões na curva da
resistência de onda. Se o número de Froude aumentar, aumentará também a resistência de
onda sobretudo à custa da influência das ondas divergentes. O máximo da resistência de
onda verifica-se para F r ≈ 0, 5. A velocidade correspondente designa-se por “velocidade da
querena”. Acima da “velocidade da querena” a resistência de onda do navio decresce. Navios
rápidos que operem acima da velocidade de querena deverão naturalmente dispor de potência
instalada suficiente para vencer aquele pico de resistência.
Bolbo de proa
A finalidade da instalação dos bolbos de proa é a redução da resistência de onda. O
mecanismo de redução consiste na interferência dos sistemas de onda. O sistema de ondas
gerado pela pressão elevada no bolbo interfere com o sistema de ondas da proa, reduzindo a
sua amplitude. A interferência favorável ocorre quando a cava do sistema transversal de ondas
2.3. DECOMPOSIÇÃO DA RESISTÊNCIA
23
Figura 2.5: Curva da resistência de onda.
do bolbo surgir na crista do sistema de ondas da proa do navio. Esta situação de interferência
favorável sendo optimizada para uma dada velocidade, pode no entanto ser considerada como
tendo efeito favorável num determinado intervalo de velocidades.
Efeito da profundidade restrita
Os efeitos da profundidade finita começam a fazer-se sentir quando a profundidade h é
menor que metade do comprimento de onda da formação ondosa gerada pelo movimento do
navio, h < λ/2. Doutra forma, podemos considerar profundidade infinita sempre que,
h>
λ
2
(2.43)
No caso de profundidades muito pequenas, h < 0, 05λ∞ , a velocidade de propagação deixa
de depender do comprimento de onda, Eq. (2.41) e passa a depender apenas da profundidade
C=
p
gh
(2.44)
Neste caso, a velocidade de grupo é igual à velocidade de propagação, a velocidade crı́tica:
p
Cg = C = gh
(2.45)
Para caracterizar o efeito da profundidade é usado o número de Froude baseado na profundidade h:
24
CAPÍTULO 2. RESISTÊNCIA
√
- se V / gh < 0, 4, o padrão de ondas é semelhante ao caso de profundidade infinita;
√
- se V / gh se aproximar de 1, o ângulo da envolvente aproxima-se de 90◦ ;
√
√
- se V / gh > 1, sin α = gh/V .
2.3.2
Resistência de atrito
A resistência de atrito do navio resulta do escoamento em torno da querena com número de
Reynolds elevado. Quando um corpo se move num fluido em repouso, uma fina camada de
fluido adere ao corpo em movimento, ou seja, tem velocidade nula relativamente ao corpo.
A variação de velocidade é elevada nas proximidades da superfı́cie do corpo e diminui com
o aumento da distância ao mesmo. É prática habitual convencionar-se para a definição da
espessura da camada limite, a distância a partir da superfı́cie do corpo até que a velocidade
do fluido seja 1% da velocidade do corpo.
Desenvolve-se assim da proa para a popa do navio uma camada limite tridimensional. Esta
camada limite inicia-se em escoamento laminar e sofre transição para o regime turbulento.
Normalmente, esta transição ocorre junto à proa do navio. Esta transição é controlada pelo
número de Reynolds do escoamento. Considerando o caso da placa lisa plana, a transição
ocorre para valores entre Re = 3×105 e Re = 106 . Em regime turbulento os efeitos dissipativos
de energia vão além do atrito molecular. Com crescente número de Reynolds, verificam-se
intensas trocas de quantidade de movimento em camadas adjacentes do fluido, ou seja, maior
transporte de energia.
No caso de uma placa plana, a espessura da camada limite turbulenta pode ser aproximada
por:
δx
= 0, 37 (ReL )−1/5
L
(2.46)
Num navio, o gradiente lontitudinal de pressão na região da proa é, em geral, favorável
ao escoamento. Pelo contrário, este gradiente é adverso na região da popa e a camada limite
aumenta significativamente de espessura deixando de poder ser considerada pequena quando
comparada com o comprimento ou a boca do navio. Para todos os efeitos práticos, a camada
limite de um navio pode ser considerada completamente turbulenta.
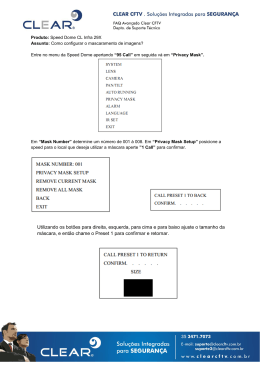
A dependência da resistência de atrito com o número de Reynolds e com a rugosidade da
superfı́cie é indicada pelo gráfico da Fig. 2.6. Para uma superfı́cie rugosa, a resistência segue
a linha da superfı́cie lisa até que, para um dado valor de Re, se separa e tem a partir daı́
um andamento quase horizontal, ou seja, o coeficiente torna-se independente do Re. Quanto
mais rugosa for a superfı́cie mais cedo se evidencia este comportamento.
A resistência de atrito de um navio é habitualmente dividida em duas componentes:
- a resistência a que ficaria sujeita uma placa plana com área equivalente;
- o aumento de resistência originado pela forma do navio.
A resistência de atrito foi estimada durante décadas por expressões empı́ricas como, por
exemplo, a fórmula de Froude:
RF = 1 − 0, 0043 (θ − 15) f SV 1,825
(2.47)
2.3. DECOMPOSIÇÃO DA RESISTÊNCIA
25
Figura 2.6: Variação do coeficiente da resistência de atrito com o número
de Reynolds e com a rugosidade da superfı́cie.
em que θ é a temperatura do fluido, expressa em ◦ C e
f = 0, 1392 +
0, 258
2, 68 + L
(2.48)
Outra fórmula empı́rica muito popular para a previsão do coeficiente da resistência de atrito é
devida a Schoenherr e conhecida como fórmula da ATTC (American Towing Tank Conference)
0, 242
= log (Re · cF )
√
cF
(2.49)
Esta correlação prevê coeficientes de atrito excessivos quando aplicada a modelos muito
pequenos. Para ultrapassar este problema foi proposta na ITTC (International Towing Tank
Conference) de 1957 uma nova fórmula,
cF =
0, 075
(logRe − 2)2
(2.50)
designada por linha de correlação modelo-navio da ITTC 1957.
2.3.3
Resistência viscosa de pressão
A componente da pressão originada pelas ondas formadas pelo movimento do navio já foi
considerada. Resta agora considerar a resistência originada por diferenças de pressão a actuar
no casco devida a efeitos viscosos do escoamento. Num escoamento ideal, ver Fig. 2.7, a
pressão exercida na popa do navio seria igual à exercida na proa, ou seja força resultante
nula. Na prática, os efeitos viscosos vão reduzir a pressão exercida na popa do navio.
Parte desta resistência será devida à geração de vórtices nas descontinuidades do casco.
Outra parte será devida a um aumento de espessura da camada limite nalguns casos potenciada por fenómenos de separação do escoamento. Estes aspectos são fundamentalmente
condicionados pela forma do casco pelo que são normalmente considerados como uma “resistência de forma”.
26
CAPÍTULO 2. RESISTÊNCIA
Figura 2.7: Distribuição de pressão num escoamento ideal, invı́scido.
2.4
Ensaios de resistência em tanques de reboque
Apesar da crescente importância dos métodos numéricos, os ensaios com modelos à escala
reduzida de navios em tanques de reboque são ainda essenciais para a avaliação hidrodinâmica
dos novos projectos e para a validação de novas soluções.
Os testes devem ser realizados em condições que permitam considerar que o modelo e o
navio têm comportamentos semelhantes por forma a que os resultados obtidos para o modelo
possam ser extrapolados para a escala real do navio. Com este objectivo, os ensaios realizamse respeitando a igualdade do número de Froude.
Os testes são realizados em tanques de reboque, com água imóvel e o modelo rebocado por
um “carrinho” ou, em alternativa, os testes podem ser realizados em “tanques de circulação”,
em que o modelo está imóvel e a água circula.
No primeiro caso, após um percurso inicial de aceleração, a velocidade do “carrinho” deve
ser mantida constante para obter um regime estacionário e garantir o rigor das observações
efectuadas. A fase final é de desaceleração e imobilização do modelo. Assim, os tanques de
reboque apresentam frequentemente centenas de metros de extensão.
O comprimento do modelo, como o exemplo representado esquematicamente na Fig. 2.8,
é escolhido de acordo com as condições experimentais no tanque de reboque. O modelo deve
ser tão grande quanto possı́vel por forma a minimizar efeitos de escala relativos aos aspectos
viscosos, nomeadamente as diferenças relativas a escoamentos laminares e turbulentos e as
questões relacionadas com fenómenos de separação do escoamento. Por outro lado, a dimensão
do modelo deve ainda permitir evitar deformações resultantes de esforços no modelo e no
equipamento de teste.
A dimensão do modelo deve ser suficientemente pequena para permitir que o “carrinho”
de reboque do modelo atinja a velocidade correspondente e evitar os efeitos de águas restritas nos testes efectuados. Estes constrangimentos conduzem naturalmente a um intervalo
prático de comprimentos admissı́veis. Os modelos para ensaios de resistência e propulsão
têm normalmente comprimentos entre 4 m < Lm < 10 m. A escala dos modelos está entre
15 < λ < 45.
2.5. CÁLCULO DA RESISTÊNCIA
27
Figura 2.8: Modelo à escala reduzida para ensaios de resistência.
Durante o movimento, o modelo mantém o rumo através de fios-guia, sendo livre para
adoptar o caimento que resultar do seu movimento. Ainda de acordo com a Fig. 2.8, a
resistência total de reboque do modelo é dada por,
RT = G1 + sin αG2
(2.51)
Com os ensaios de resistência com o modelo à escala reduzida pretende-se obter dados
que permitam estimar a resistência do navio sem o propulsor e apêndices, ou seja, dita da
querena simples. Dos ensaios no tanque de reboque obtém-se a resistência nas condições do
tanque, ou seja:
- águas suficientemente profundas;
- ausência de correntes;
- ausência de vento;
- água doce à temperatura ambiente.
O número de Reynolds é normalmente superior duas ordens de grandeza na escala do navio
que na escala do modelo, tipicamente na ordem de 109 e 107 , respectivamente. O modelo tem
frequentemente uma fita rugosa para estimular artificialmente a transição da camada limite
laminar para turbulenta mais perto da proa do modelo. Globalmente, o desvio originado
pelo facto de não se manter constante o número de Reynolds no ensaio é depois compensado
através de correcções empı́ricas.
2.5
Cálculo da resistência
2.5.1
Métodos de extrapolação
A resistência do modelo tem depois de ser convertida por forma a obter-se uma estimativa
da resistência do navio na escala real. Para tal, estão disponı́veis, entre outros, os seguintes
métodos:
28
CAPÍTULO 2. RESISTÊNCIA
- o método ITTC 1957;
- o método de Hughes/Prohaska;
- o método ITTC 1978;
- o método Geosim de Telfer.
Actualmente, o método mais frequentemente utilizado na prática é o método ITTC 1978.
Método ITTC 1957
Para a aplicação deste método, a resistência total da querena, RT , é considerada decomposta
nos seguintes termos,
RT = RF + RR
(2.52)
a resistência de atrito, RF , e a resistência residual, RR .
Os coeficientes de resistência, adimensionais, são genericamente calculados por,
ci =
Ri
1
2
2 ρV S
(2.53)
Na aplicação deste método de previsão é considerado igual para o modelo e para o navio
o coeficiente de resistência residual,
cR = cT m − cF m
(2.54)
determinado a partir do coeficiente de resistência total do modelo,
cT m =
RT m
1
2
2 ρm Vm Sm
(2.55)
e da fórmula “ITTC 1957” (Eq. (2.50)) para o cálculo do coeficiente de resistência de atrito
cF ,
cF =
0.075
(log10 Re − 2)2
O coeficiente de resistência total para o navio é então estimado por:
cT s = cF s + cR + cA = cF s + (cT m − cF m ) + cA
(2.56)
em que cA é um factor de correcção tradicionalmente associado à rugosidade do casco. De
facto, embora o modelo esteja construı́do a uma dada escala geométrica, a rugosidade das
superfı́cies do modelo e do navio não respeitam esta escala. O valor de cA pode ser obtido
por correlações empı́ricas como, por exemplo,
cA = 0.35 × 10−3 − 2 × Lpp × 10−6
(2.57)
ou a partir de valores tabelados (Tab. 2.1).
A previsão da resistência total do navio é dada por
1
RT s = cT s · ρs Vs2 Ss
2
(2.58)
2.5. CÁLCULO DA RESISTÊNCIA
Lpp (m)
50 - 150
150 - 210
210 - 260
260 - 300
300 - 350
350 - 400
29
cA
0,0004-0,00035
0,0002
0,0001
0
-0,0001
0,00025
Tabela 2.1: Valores do coeficiente de correcção cA em função do comprimento do navio.
Método de Hughes-Prohaska
O método de Hughes-Prohaska é normalmente classificado como um método de factor de
forma. É considerada a decomposição da resistência total em duas componentes, uma associada à resistência de onda e outra dependente da forma do casco. Considerando então os
coeficientes adimensionais, fica
cT = (1 + k) · cF 0 + cw
(2.59)
Para a determinação do factor de forma, presume-se aqui a relação
cT
F r4
= (1 + k) + α
cF 0
cF 0
(2.60)
que é particularmente válida para valores reduzidos de velocidade.
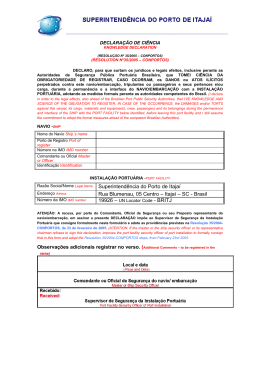
Após vários ensaios a diferentes velocidades, diferentes números de Froude, é possı́vel
construir um gráfico semelhante ao representado na Fig. 2.9 e, com base naqueles valores,
obter o valor de k por regressão linear.
Figura 2.9: Representação gráfica da dependência de
cT
F r4
com
.
cF 0
cF 0
Este factor de forma, (1 + k),é assumido como independente dos valores de F r e de Re e
igual para o navio e modelo.
O procedimento de cálculo do método de Hughes-Prohaska é o seguinte:
30
CAPÍTULO 2. RESISTÊNCIA
- determinar o coeficiente de resistência total,
cT m =
RT m
1
ρm Vm2 Sm
2
- determinar o coeficiente de resistência de onda, o mesmo para o modelo e o navio,
cw = cT m − cF 0m · (1 + k)
(2.61)
- determinar o coeficiente de resistência total para o navio,
cT s = cw + cF 0s · (1 + k) + cA
(2.62)
- determinar a resistência total para o navio, novamente por
1
RT s = cT s · ρs Vs2 Ss
2
O coeficiente da resistência de atrito, cF 0 , é neste caso obtido pela correlação de Hughes,
cF 0 =
0.067
(log10 Re − 2)2
(2.63)
Quanto ao coeficiente de correcção cA , a ITTC recomenda a aplicação universal de
cA = 0.0004
(2.64)
na aplicação deste método.
Método ITTC 1978
É uma modificação do método de Hughes-Prohaska, geralmente mais preciso que os anteriormente apresentados. Ao contrário dos métodos anteriormente descritos, este método de
extrapolação dos resultados obtidos nos ensaios com modelos à escala reduzida inclui o efeito
da resistência do ar.
A previsão do coeficiente de resistência total para o navio é, também aqui, descrita em
termos do factor de forma, ou seja,
cT s = (1 + k) cF s + cw + cA + cAA
(2.65)
em que:
- cw é o coeficiente de resistência de onda, igual para o navio e modelo;
- cA é o coeficiente de correcção;
- e cAA a resistência do ar, cAA = 0.001 ·
AT
.
S
2.5. CÁLCULO DA RESISTÊNCIA
31
O coeficiente da resistência de atrito é determinada de forma semelhante à preconizada
para o método ITTC 57, Eq. (2.50).
Para a determinação da correcção devida pela variação da rugosidade da querena, é aconselhada aqui a seguinte fórmula:
r
3
cA · 10 = 105 3
ks
− 0.64
Loss
(2.66)
em que ks é a rugosidade do casco e Loss é o comprimento do navio no plano de flutuação.
Para navios novos ks /Loss = 10−6 e cA = 0.00041.
Os detalhes sugeridos pela ITTC na aplicação deste método estão indicados no Apêndice
A.
Método Geosim
Este método foi proposto por Telfer em 1927. Dos métodos aqui enunciados, é considerado
como o método de extrapolação com previsões mais precisas da resistência do navio. A
grande vantagem do método resulta de não recorrer a qualquer decomposição, teoricamente
questionável, da resistência total.
São realizados vários ensaios com modelos geometricamente semelhantes mas a diferentes
escalas. Isto significa que os testes podem ser realizados, para a mesma velocidade equivalente,
com igual número de Froude e diferente número de Reynolds. O coeficiente de resistência total,
obtido naqueles ensaios, é representado em função de logRe−1/3 . Para cada um dos modelos,
obtém-se uma curva da resistência, em função do F r, que permite fazer a extrapolação para
a escala do navio.
Pela grande quantidade de modelos a construir e ensaios a realizar, trata-se de um método
muito dispendioso, utilizado sobretudo apenas para fins de investigação.
2.5.2
Resistências adicionais
As condições de ensaio dos modelos são substancialmente diferentes daquelas em que o navio
irá operar. As principais diferenças a considerar resultam de:
- a presença de apêndices na querena;
- a navegação em águas pouco profundas;
- o vento;
- a crescente rugosidade do casco durante a vida do navio;
- as condições de mar.
Para estimar as alterações causadas por estes itens no comportamento do navio, usam-se
correcções empı́ricas, baseadas em pressupostos fı́sicos, para correlacionar os valores obtidos
no modelo, ou no navio em provas de mar, com os estimados para as condições normais de
serviço do navio. A resistência adicional devida a apêndices e a resistência do navio em águas
pouco profundas são os tópicos sucintamente abordados nos parágrafos seguintes.
32
CAPÍTULO 2. RESISTÊNCIA
Resistência adicional dos apêndices
Os modelos de navios à escala reduzida podem ser testados com apêndices à escala geométrica apropriada. No entanto, nem sempre nesta altura do projecto estes estão completamente
definidos. Por outro lado, o escoamento em torno dos apêndices é predominantemente governado pelas forças de origem viscosa. Seria então necessário, para obter resultados fiáveis,
verificarem-se condições de semelhança de Reynolds, o que, como já referido, não é viável
se, cumulativamente, pretendermos manter a igualdade do número de Froude. Consequentemente, a presença dos apêndices em condições de semelhança de Froude tem pouca relevância.
Em primeira análise, os apêndices do casco contribuem para um aumento da superfı́cie
molhada do navio. Por outro lado, da sua presença surgem também alterações no factor de
forma do casco. Para a determinação da resistência de forma dos apêndices pode recorrer-se a
dois ensaios, com e sem apêndices, a uma velocidade superior. Se admitirmos que a resistência
de onda é igual nos dois casos, a diferença de resistência verificada, tendo descontado a
diferença de resistência de atrito resultante da variação da área molhada, dá-nos a resistência
de forma dos apêndices.
Os valores tı́picos de acréscimo de resistência originados pela presença de apêndices são
os seguintes:
- robaletes: 1 a 2%;
- impulsores:
- de proa: 0 a 1%;
- transversais de popa: 1 a 6%;
- aranhas de veios: 5 a 12% (“twin-screw ” pode chegar a 20%);
- leme: 1%.
Resistência em águas pouco profundas
Quando um navio navega em águas pouco profundas verifica-se um aumento, quer da resistência de atrito, quer da resistência de onda. Em particular, a resistência aumenta significativamente
√ para valores próximos do número de Froude crı́tico, baseado na profundidade,
Fnh = V / gH = 1.
O aumento da resistência do navio quando a navegar em águas pouco profundas foi estudado por Schlichting. A sua hipótese de trabalho foi a seguinte: a resistência de onda é a
mesma se o comprimento de onda da ondulação transversal for igual.
O gráfico da Fig. 2.10 permite prever a perda de velocidade do navio em águas pouco
profundas. Correcções simples não são possı́veis para águas muito pouco profundas já que os
fenómenos envolvidos são complexos. Nestes casos, só testes em modelos ou simulações por
CFD poderão contribuir para uma melhor previsão.
2.6
Previsão da resistência com dados sistemáticos ou estatı́sticos
Na fase preliminar do projecto de um navio podem ser utilizados métodos aproximados para a
previsão da resistência baseados em ensaios de séries sistemáticas de navios ou, pela regressão
2.6. PREVISÃO COM DADOS SISTEMÁTICOS OU ESTATÍSTICOS
33
Figura 2.10: Redução de velocidade (%) em águas pouco profundas.
estatı́stica de dados experimentais relativos a modelos e a navios à escala real.
Séries sistemáticas são conjuntos de formas de querena em que se provocou a variação,
sistemática, de um ou mais dos seus parâmetros de forma. As variações sistemáticas são
feitas em torno de uma “forma mãe” (“parent form”). Os resultados dos ensaios de resistência
dos modelos que constituem a série permitem determinar um coeficiente adimensional de
resistência para uma forma de querena contida ou interpolada na série.
Taylor mediu, entre 1907 e 1914, 80 modelos obtidos por variação sistemática de:
- a razão entre o comprimento e a raiz cúbica do deslocamento (5 valores de L/∆1/3 );
- a razão entre a boca e o calado (B/T = 2, 25; 3, 75);
- o coeficiente prismático (8 valores de 0,48 a 0,86);
a partir de uma “forma mãe”: o cruzador “Leviathan”.
Estes dados foram posteriormente re-trabalhados por Gertler em 1954, disponibilizando
diagramas de resistência residual.
Outra série sistemática, com particular interesse para os navios mercantes, é a série 60,
devida aos trabalhos de Todd. Consta de 5 “formas mãe” com coeficientes de finura, 0,60,
0,65, 0,70, 0,75 e 0,80. Para cada uma daquelas “formas mãe” existem variações de L/B,
B/T , etc.
Como exemplo de um método de previsão da resistência de navios envolvendo dados
estatı́sticos pode-se indicar o método de Holtrop e Mennen. Este método pode ser aplicado
para efectuar uma análise qualitativa do projecto de um navio no que diz respeito à sua
resistência. O método baseia-se na regressão estatı́stica de resultados de ensaios em modelos
e de resultados de provas de mar de navios. A base de dados é muito vasta cobrindo uma
gama muito alargada de tipos de navios. No entanto, para formas muito especı́ficas de navio,
34
CAPÍTULO 2. RESISTÊNCIA
a precisão das previsões pode reduzir-se pelo menor número de elementos daquele tipo na
base.
2.7
Ensaios à escala real
Os resultados obtidos nas provas de mar de um navio são talvez o mais importante requisito
para a aceitação deste pelo armador. A especificação detalhada destas provas deve estar
claramente contratualizada entre o armador e o estaleiro. Entre outros organismos, a ITTC
recomenda alguns procedimentos para a realização destas provas. As recomendações para as
provas de velocidade e de potência estão incluı́das no Apêndice B.
Os problemas surgem normalmente em consequência de as provas se realizarem em condições diferentes, quer das que foram consideradas como condições de projecto, quer daquelas
que se verificaram nos ensaios com o modelo à escala reduzida.
O contrato de construção deve especificar uma velocidade contratual do navio, à carga de
projecto, para uma dada percentagem da MCR do motor, em águas tranquilas e profundas e
na ausência de vento. São raras as ocasiões em que é possı́vel realizar as provas de mar em
condições próximas das condições contratuais. As condições em que se realizam as provas de
mar incluem, frequentemente:
- condição de carga parcial ou em condição de lastro;
- presença de correntes e ondulação;
- águas pouco profundas;
Para prevenir maior diversidade de resultados, é habitual definir contratualmente valores
limite para as condições ambientais em que as provas de mar se realizarão. As condições
recomendadas pela ITTC para a realização das provas de velocidade e potência estão no
Apêndice C. As diferenças entre as condições contratuais e verificadas durante a realização
das provas de mar impõem a utilização de correlações para corrigir os resultados obtidos para
as condições de contrato. Para além de todas as incertezas experimentais, todo este processo
de correcção, com recurso a gráficos e tabelas, oferece muitas dúvidas de aplicação.
A “prova da milha” pode ser avaliada com velocidade “over ground ” ou velocidade “in
water ”. A velocidade na água exclui o efeito das correntes. A velocidade “over ground ”
era avaliada através de equipamentos de navegação mas, a disponibilidade de sistemas de
posicionamento por satélite (GPS) permitiu eliminar muitos problemas e incertezas destas
provas. Para reduzir os efeitos de ventos e correntes, as provas de velocidade, consumo, etc.
devem ser realizadas repetidamente em sentidos opostos.
De notar que as provas de mar de um navio vão muito para além das provas de velocidade e potência. Todas as funcionalidades do navio, operacionais e de segurança, deverão ser
demonstradas. Para as restantes provas, nomeadamente as que dizem respeito à manobrabilidade do navio, existem também recomendações exaustivas da ITTC para a sua realização.
Capı́tulo
3
Propulsão
3.1
Sistemas de propulsão
Em qualquer tipo de navio temos presente um propulsor cuja finalidade é a geração de uma
força propulsiva. As soluções propulsivas são muito diversas mas predominantemente os navios
continuam a utilizar hélices simples como meio de propulsão. Outros meios de propulsão com
expressão significativa em aplicações especı́ficas são:
- os hélices “especiais”, com particular destaque para os hélices com tubeira e os hélices
contra-rotativos;
- os sistemas de jacto de água (“water-jets” ou “pump-jets”);
- os propulsores azimutais (“AziPod’s)”;
- e os propulsores cicloidais (“Voith-Schneider ”).
Na escolha da solução propulsiva deverá ser sempre considerado o seu rendimento e a
interacção com a querena. Outro aspecto genérico a considerar durante o projecto da solução
propulsiva é o fenómeno da cavitação originada pela velocidade elevada do movimento das
pás do hélice na água.
3.1.1
Hélices
O hélice é colocado tradicionalmente à popa do navio para recuperar parte da energia dispendida para vencer a resistência da querena. Na forma mais tradicional da popa dos navios,
a esteira nominal é muito não-uniforme. A uniformidade da esteira da querena é uma das
condições necessárias para o bom funcionamento do hélice. A utilização da popa aberta ou
de um bolbo na popa permite melhorar a esteira.
As pás do hélice, animadas de velocidade de rotação e de avanço, funcionando como
superfı́cies sustentadoras, estão distribuı́das simetricamente em torno do cubo. As secções
das pás funcionam como perfis alares a ângulo de ataque gerando uma força de sustentação.
Esta força de sustentação contribui para a força propulsiva axial e para o binário resistente
ao veio.
Classificam-se com hélices “direitos” aqueles que, quando observados de ré, rodam no
sentido horário. Nos navios com dois hélices, são normalmente utilizados:
35
36
CAPÍTULO 3. PROPULSÃO
- um hélice direito a estibordo;
- e um hélice esquerdo a bombordo.
Nestes navios, a popa é relativamente plana e os veios estão expostos e suportados por
aranhas (“shaft brackets”). A presença destas aranhas provoca ainda não-uniformidades na
esteira em que, devido à forma da popa, o escoamento entra no hélice com um certo ângulo.
Figura 3.1: Hélice com tubeira.
A aplicação de uma tubeira aceleradora, Fig. 3.1, permite aumentar o rendimento, relativamente a um hélice convencional, no caso de hélices fortemente carregados como os aplicados
em rebocadores, arrastões, petroleiros, etc. Outro objectivo da aplicação das tubeiras pode
ser a uniformização do escoamento de entrada no hélice. Para este fim trata-se normalmente
de tubeiras assimétricas colocadas avante do hélice. Frequentemente este tipo de tubeiras é
instalada depois de o navio estar em serviço.
Figura 3.2: Hélices de passo fixo e de passo controlável.
3.1. SISTEMAS DE PROPULSÃO
37
Para um hélice de passo fixo, a velocidade do navio e a força propulsiva são controladas
pela velocidade de rotação do hélice. Para um hélice de passo controlável, a força propulsiva
pode também ser controlada por variação do passo do hélice. A variação do passo obtém-se
por rotação das pás em torno de um eixo, à direita na Fig. 3.2. Utiliza-se quando a velocidade
de rotação é constante, ou variável numa gama restrita, quando o hélice tem de funcionar em
mais de uma condição.
Apesar de constituı́rem uma solução cara, pela complicação de chumaceiras e engranagens
necessária, encontram-se exemplos de propulsão por hélices contrarotativos. São dois hélices,
em que o hélice de trás tem um diâmetro ligeiramente menor que o hélice da frente, a rodar
em sentidos contrários, permitindo ao hélice de trás eliminar a perda de energia cinética
de rotação do hélice da frente, Fig. 3.3. Em consequência, apresentam rendimentos tı́picos
superiores a um hélice isolado.
Figura 3.3: Hélices em contra-rotação.
Outro tipo particular de hélice é o hélice supercavitante, Fig. 3.4. É um hélice para
funcionar com elevada velocidade de rotação em que as secções das pás são concebidas para
provocar uma bolsa de cavitação que envolve toda a pá. O perigo de implosão é eliminado
porque a implosão das bolhas de cavitação ocorre longe das faces das pás. Aplicam-se em
navios de alta velocidade com rendimento, em geral, fraco.
3.1.2
Outros meios de propulsão
Jacto de água
Nestes sistemas, a força propulsiva é obtida pela descarga de um jacto de água à popa do
navio. Para transmitir a energia pretendida ao jacto podem ser utilizadas bombas axiais,
como no caso da Fig. 3.5, ou bombas centrı́fugas.
Os sistemas de jacto de água constituem actualmente um solução comprovada para a propulsão de embarcações rápidas, com divulgação crescente nas embarcações de recreio, “ferries”,
embarcações de patrulha, etc. São boas soluções quando os principais requisitos colocados
passam pela manobrabilidade do navio, bom rendimento propulsivo, bom comportamento em
águas restritas e pouca necessidade de manutenção. Actualmente, já estão disponı́veis no
mercado soluções deste tipo para potências propulsivas da ordem dos 30MW.
38
CAPÍTULO 3. PROPULSÃO
Figura 3.4: Hélices supercavitante.
Figura 3.5: Propulsão por jacto de água.
Propulsores azimutais
Esta configuração, ver Fig. 3.6, possibilita a geração de força propulsiva em qualquer direcção
por rotação do propulsor em torno do eixo vertical. No sistema tradicional de propulsão
azimutal, o motor era colocado no interior do casco e um sistema mecânico relativamente
complexo fazia a transmissão do movimento às pás. Actualmente, o accionamento é feito
por um motor eléctrico colocado no veio de propulsor. Estes sistemas permitem combinar a
propulsão e o governo do navio, dispensando a presença do leme.
Apresentam como principais vantagens um bom rendimento, justificado em grande parte
pela maior uniformidade do escoamento à entrada do propulsor, elevada capacidade de manobra e economia de espaço. A sua aplicação, inicialmente quase que restrita a ferries, tem-se
alargado nos tempos mais recentes a praticamente quase todos os tipos de navios.
3.1. SISTEMAS DE PROPULSÃO
39
Figura 3.6: Propulsores azimutais.
Propulsores cicloidais
Esta solução propulsiva, representada na Fig. 3.7, desenvolvida pela Voight a partir duma
ideia inicial de Ernst Schneider, permite gerar impulso de magnitude variável em qualquer
direcção. As variações daquele impulso são rápidas, contı́nuas e precisas, combinando assim
as funções de propulsão e governo do navio.
Figura 3.7: Propulsores cicloidais.
O propulsor, colocado no fundo do navio, é composto por um conjunto de lâminas paralelas
com movimento de rotação, segundo um eixo vertical, com velocidade variável. Para gerar o
impulso, cada uma daquelas lâminas tem um movimento oscilante em torno do seu próprio
eixo. O percurso das lâminas vai determinar a força impulsiva gerada, enquanto um ângulo
de fase entre 0◦ e 360◦ vai definir a direcção do impulso. Desta forma, pode ser gerada a
mesma força propulsiva em qualquer direcção. A intensidade e a direcção da força propulsiva
40
CAPÍTULO 3. PROPULSÃO
são controladas por um conjunto cinemático de transmissão mecânica.
Pelas suas caracterı́sticas, esta solução apresenta bom desempenho na propulsão de rebocadores, ferries, grandes iates, navios de apoio a plataformas petrolı́feras e outros navios
especiais.
3.2
Hélices propulsores
O projecto do hélice deverá dar resposta às seguintes questões:
- será que o hélice desenvolverá a desejada força propulsiva à velocidade rpm de projecto?
- qual vai ser a eficiência do hélice?
- qual vai ser o desempenho do hélice em condições diferentes das condições de projecto?
- será a distribuição de pressões favorável à prevenção da cavitação?
- qual será o valor das forças e momentos gerados pelo hélice sobre o veio propulsor e
chumaceiras de apoio e de impulso?
- qual a pressão induzida pelo funcionamento do hélice no casco do navio, potencialmente
responsável por vibrações e ruı́do?
Os principais métodos de cálculo disponı́veis para, de alguma forma, dar resposta àquelas
questões são:
- a teoria da quantidade de movimento;
- a teoria dos elementos de pá;
- a teoria da linha sustentadora;
- a teoria da superfı́cie de sustentação;
- o método de painel;
- as simulações RANSE.
Outro contributo importante para o projecto do hélice vem das séries sistemáticas de
hélices, para as quais são já conhecidos os principais parâmetros de funcionamento em águas
livres.
Por último, há que citar o contributo importante dos ensaios experimentais em modelos
à escala reduzida, os ensaios do hélice em águas livres e o ensaio de propulsão.
3.2.1
Geometria do hélice
Na complexa geometria do hélice, conjunto de pás distribuı́das uniformemente em torno do
cubo montado na extremidade do veio, representada esquematicamente na Fig. 3.8, distinguemse as seguintes áreas, linhas e pontos:
- o bordo de ataque (“leading edge”), a linha frontal das pás;
- o bordo de fuga (“trailing edge”), a aresta atrás;
3.2. HÉLICES PROPULSORES
41
Figura 3.8: Geometria do hélice.
- a extremidade da pá (“tip”) é o ponto linha ou secção de maior raio;
- o dorso (“back”) e a face da pá são, respectivamente, a superfı́cie da pá do lado do veio,
aspiração, e a superfı́cie do lado de pressão;
No cubo, com uma forma axisimétrica, unem-se as pás pela sua raiz (“ blade root”).
A geometria do hélice propulsor é caracterizada, entre outras, pelas seguintes dimensões,
também representadas naquela figura:
- diâmetro do hélice (“propeller diameter”), D;
- diâmetro do cubo (“boss (or hub) diameter”), d;
- número de pás do hélice (“propeller blade number”), Z;
- passo do hélice (“propeller pitch”), P ;
- área do disco, A0 = πD2 /4;
- área projectada, área da projecção das pás num plano normal ao eixo do hélice, AP ;
- área expandida, soma das áreas das faces das pás, AE ;
- deslocamento circunferencial (“skew”);
- abatimento axial (“rake”), iG .
3.2.2
Valores caracterı́sticos
Como parâmetros adimensionais para caracterização dos hélices propulsores podemos apontar:
- a razão entre os diâmetros do cubo e do hélice, d/D;
- a razão entre a área expandida e a área do disco, AE /A0 , frequentemente designada por
“blade area ratio” (BAR);
42
CAPÍTULO 3. PROPULSÃO
- e a razão entre o passo e o diâmetro do hélice, P/D.
São valores tı́picos para a razão de área expandida 0.3 < AE /A0 < 1.5. Razões superiores a 1 significam que o hélice tem pás sobrepostas o que o torna dispendioso. O valor de
AE /A0 é selecionado de tal forma que a carga das pás seja suficientemente baixa para evitar
uma situação inaceitável de cavitação. Quanto mais carregada for a condição de funcionamento prevista para o hélice maior deverá ser a razão AE /A0 considerada na sua selecção. O
rendimento do hélice diminui com o aumento da razão AE /A0 .
O número de pás Z é um parâmetro muito importante para as vibrações induzidas pelo
hélice. Em geral, um número ı́mpar de pás Z proporciona melhores caracterı́sticas no que diz
respeito a vibrações. Maior número de pás reduz a vibração, devido aos inferiores picos de
pressão, mas aumenta os custos de fabrico.
Os hélices propulsores para navios são sempre adaptados às caracterı́sticas especı́ficas do
navio após exaustivo estudo hidrodinâmico. O número de pás está normalmente entre 4 e 7.
Os hélices propulsores para pequenas embarcações, regra geral com o número de pás entre 2
e 4, são produzidos em massa.
3.3
Teoria da quantidade de movimento
A teoria mais simples para representar o funcionamento de um hélice propulsor é a teoria da
quantidade de movimento, também designda por vezes como do disco actuante. Esta teoria
permite relacionar a força propulsiva do hélice com as velocidades induzidas. Tem como
principais hipóteses simplificativas:
- considerar o escoamento de fluido perfeito e incompressı́vel;
- o número de pás do hélice é infinito;
- o hélice propulsor exerce uma força axial T que se distribui uniformemente sobre o disco
do hélice de diâmetro D;
- o hélice não induz velocidade velocidade de rotação no fluido, ou seja, não há velocidade
circunferencia induzida.
3.3.1
Força propulsiva
Consideremos o escoamento axisimétrico através do plano do hélice, representado na Fig. 3.9,
e denotar por VA a velocidade de aproximação da água ao hélice e por p∞ a pressão em
pontos suficientemente afastados quer a vante quer a ré do hélice. Conforme representado,
sendo a água incompressı́vel, a secção do escoamento reduz-se pelo aumento de velocidade
transmitido pelo hélice ao escoamento de água. Na figura podemos ainda ver que no disco
existe uma descontinuidade de pressão ∆p. Esta descontinuidade, como resultado do referido
“disco actuante”, gera uma força propulsiva do hélice dada por
T = ∆pA0
(3.1)
Quanto à distribuição de velocidades, vamos considerar que a velocidade no disco é VA +V0
e, no infinito, a velocidade é VA + V∞ .
3.3. TEORIA DA QUANTIDADE DE MOVIMENTO
43
Figura 3.9: Distribuição espacial de velocidade e pressão para a teoria da
quantidade de movimento.
Representando por A−∞ e A∞ as áreas no infinito, a montante e a juzante, respectivamente, do tubo de corrente que passa pelo disco actuante, para se verificar a conservação de
massa no escoamento será necessário que,
Va A−∞ = (Va + V0 ) A0 = (Va + V∞ ) A∞
(3.2)
Então, aquelas áreas, A−∞ e A∞ estão relacionadas com a área do disco e com a velocidade
induzida por
Va + V0
A0
Va
(3.3)
Va + V0
A0
Va + V∞
(3.4)
A−∞ =
e
A∞ =
Aplicando agora o princı́pio da conservação da quantidade de movimento ao escoamento
de fluido no tubo de corrente, obtemos a equação,
T = ρ (Va + V∞ )2 A∞ − ρVa2 A−∞
(3.5)
Usando a equação de conservação da massa, Eq. (3.2), podemos dizer então que a força
propulsiva T é dada por,
T = ρ (Va + V0 ) V∞ A0
(3.6)
e, que o “salto de pressão” no disco actuante vale
∆p = ρ (Va + V0 ) V∞
(3.7)
44
CAPÍTULO 3. PROPULSÃO
Por fim, vamos aplicar a equação de Bernoulli ao tubo de corrente. A montante do disco
temos,
1
1
p∞ + ρVa2 = p0 + ρ (Va + V0 )2
2
2
(3.8)
e, a juzante,
1
1
p∞ + ρ (Va + V∞ )2 = p0 + ∆p + ρ (Va + V0 )2
2
2
(3.9)
Fazendo agora a subtracção das equações, Eq. (3.9) − Eq. (3.8), temos uma nova equação
para avaliar o valor de ∆p
1
(3.10)
∆p = ρ Va + V∞ V∞
2
Naturalmente que o “salto de pressão” avaliado pela última equação não pode ser diferente
daquele que resulta da Eq. (3.7). Logo,
ρ (Va + V0 ) V∞
1
= ρ Va + V∞ V∞
2
(3.11)
e, então, daqui resulta que a velocidade induzida no disco é metade da velocidade induzida
na esteira no infinito,
1
V0 = V∞
2
(3.12)
A força propulsiva T obtida no disco actuante pode ser calculada, em função da velocidade
induzida no disco, por
T =
3.3.2
πD2
ρ (Va + V0 ) 2V0
4
(3.13)
Coeficiente de carga
Se definirmos para um hélice propulsor como coeficiente de carga, CT ,
CT =
T
π 21
2
4 D 2 ρVa
e considerarmos a força propulsiva resultante da teoria do disco actuante, obtém-se
V0
V0
CT = 4
1+
Va
Va
(3.14)
(3.15)
ou, em termos de velocidade induzida no disco,
p
1
V0
=
−1 + 1 + CT
Va
2
(3.16)
3.4. ENSAIOS COM MODELOS REDUZIDOS DE HÉLICES
3.3.3
45
Rendimento ideal do hélice
O rendimento ideal do hélice é o rendimento máximo que pode ser obtido em fluido perfeito
com um hélice propulsor que não induza velocidade de rotação no fluido.
Num referencial em repouso no fluido, considere-se que o hélice avança com velocidade
Va , exercendo uma força propulsiva T . A potência efectiva do hélice é dada por
PE = T Va
(3.17)
A perda de energia cinética axial por unidade de tempo é o fluxo de energia por unidade
de tempo através de um plano perpendicular à direcção de avanço, no infinito, a juzante.
Este fluxo de energia é calculado pelo produto do caudal mássico que se escoa pelo tubo de
corrente pela energia cinética especı́fica,
Ėp = ρ
πD2
1 2
(Va + V0 ) × V∞
4
2
ou seja, considerando a relação conhecida entre a velocidade no disco e na esteira no infinito,
Ėp = ρ
πD2
(Va + V0 ) V02
2
(3.18)
O rendimento ideal do hélice propulsor será então dado por
ηi =
T Va
T Va + Ėp
(3.19)
ou, considerando (3.13) e (3.18), e simplificando, ficamos com
ηi =
3.4
1
1 + VVa0
(3.20)
Ensaios com modelos reduzidos de hélices
Apesar de o hélice ir funcionar numa esteira não-uniforme do navio, são realizados ensaios
para avaliação do seu desempenho numa esteira uniforme, recorrendo ao ensaio em águas
livres de um modelo à escala reduzida do hélice, em condições apropriadas de semelhança.
Neste ensaio, o chamado “open water test”, um modelo do hélice é deslocado com a velocidade
da avanço Va num fluido em repouso. O escoamento de aproximação deve ser tão uniforme
quanto possı́vel. Durante o deslocamento do hélice este é posto a rodar por um pequeno motor
eléctrico à velocidade n (rps) pretendida. O ensaio realiza-se normalmente a uma velocidade
de rotação constante, ou seja, para um dado número de Reynolds.
As caracterı́sticas propulsivas em águas livres, nomeadamente a força propulsiva T e o
binário Q, são medidas em regime estacionário de funcionamento. Depois de adimensionalizados, os valores medidos da força propulsiva e do binário para vários regimes de funcionamento
constituem o “diagrama em águas livres” do hélice em questão.
A força propulsiva T e o binário Q disponibilizados por um hélice propulsor dependem de
várias variáveis:
- a velocidade de avanço Va ;
46
CAPÍTULO 3. PROPULSÃO
- a velocidade de rotação n;
- o diâmetro D;
- a massa especı́fica do fluido ρ;
- a viscosidade cinemática do fluido ν.
Aplicando a análise dimensional, expressando a dependência dos coeficientes de força
propulsiva e de binário dos seguintes grupos adimensionais:
- coeficiente de avanço, J =
Va
;
nD
- e número de Reynolds, aqui definido como Re =
nD2
;
ν
ou seja,
KT = KT (J, Re)
e
KQ = KQ (J, Re)
obtêm-se os seguintes expressões para os referidos coeficientes adimensionais:
- coeficiente de força propulsiva KT =
- coeficiente de binário KQ =
3.4.1
T
;
ρn2 D4
Q
.
ρn2 D5
Diagrama em águas livres
O diagrama em águas livres do hélice integra a representação gráfica da variação dos coeficientes da força propulsiva, KT , e de binário, KQ , com o coeficiente de avanço, Va . Um exemplo
de diagrama em águas livres está representado na Fig. 3.10.
As curvas traçadas nestes diagramas servem principalmente para a optimização do hélice
e determinação do ponto de funcionamento. Na prática, já não são utilizadas aquelas representações gráficas no projecto de hélices, mas sim os polinómios representativos daquelas
evoluções para permitir o cálculo computacional. As tabelas têm cerca de 50 coeficientes
para os polinómios relativos à série sistemática de hélices de Wageningen. Embora o trabalho
inicial de registo destes coeficientes seja moroso e fastidioso, os processos de cálculo e optimização posteriores ficam muito facilitados e expeditos pela utilização de programas ou folhas
de cálculo. A importância da representação gráfica está actualmente restrita à verificação
da tendência de variação do desempenho do hélice com a alteração de algumas condições
operacionais.
3.4.2
Rendimento
Definindo o rendimento de um hélice propulsor como sendo a razão entre a potência efectiva
e a potência fornecida pelo veio ao hélice, o rendimento em águas livres é calculado por
η0 =
PE
Va T
=
PD
2πnQ
(3.21)
3.5. SÉRIES SISTEMÁTICAS
47
Figura 3.10: Diagrama de águas livres.
a partir das medições observadas durante o ensaio.
Ou, se quisermos expressá-lo em termos dos coeficientes adimensionais, podemos obter,
η0 =
3.4.3
JKT
2πKQ
(3.22)
Índice de qualidade
A qualidade de um propulsor não fica bem caracterizada apenas pelo seu rendimento máximo.
O ı́ndice de qualidade, que permite caracterizar melhor um hélice para uma dada aplicação
especı́fica, é dado por
q=
η0
ηi
em que η0 é o rendimento em águas livres e ηi é o rendimento ideal.
8KT
, substituindo em (3.23):
Como CT =
πJ 2
!
r
KT
8
q=
J + J 2 + KT
4πKQ
π
3.5
(3.23)
(3.24)
Séries sistemáticas
Uma série sistemática de hélices é um conjunto de hélices obtidos por variação sistemática de
parâmetros geométricos. Ao longo de décadas, por todo o mundo têm sido realizados ensaios
em séries sistemáticas de propulsores para navios. As principais caracterı́sticas de alguns
exemplos de séries sistemáticas de hélices propulsores simples de passo fixo estão incluı́das na
Tab. 3.1.
O principal objectivo perseguido na realização dos ensaios sistemáticos nestes conjuntos
de hélices é criar uma base de dados que permita ajudar o projectista a entender os principais
48
CAPÍTULO 3. PROPULSÃO
Série
Wageningen B
Au
Gawn
KCA
Ma
Newton-Rader
KCD
Meridian
No
≈ 120
34
37
≈ 30
32
12
24
20
Z
2−7
4−7
3
3
3e5
3
3−6
6
AE /A0
0, 3 − 1, 05
0, 4 − 0, 758
0, 2 − 1, 1
0, 50 − 1, 25
0, 75 − 1, 20
0, 5 − 1, 0
0, 44 − 0, 80
0, 45 − 1, 05
P/D
0, 5 − 1, 4
0, 5 − 1, 2
0, 4 − 2, 0
0, 6 − 2, 0
1, 0 − 1, 45
1, 05 − 2, 08
0, 6 − 1, 6
0, 4 − 1, 2
D(mm)
250
250
508
406
250
254
406
305
Tabela 3.1: Séries sistemáticas de propulsores.
factores que influenciam o desempenho do hélice, bem como a ocorrência de cavitação, em
várias condições de funcionamento. Um segundo objectivo é a construção de diagramas que
permitam ajudar à selecção das caracterı́sticas mais apropriadas para uma dada aplicação à
escala do navio.
3.5.1
Série sistemática de Wageningen
Uma das séries sistemáticas de hélices propulsores mais populares é a série B de Wageningen.
Esta série, em que os trabalhos iniciais datam de 1940, será talvez a mais vasta. As principais
caracterı́sticas destes hélices são:
- ter distribuição radial do passo constante;
- um pequeno deslocamento circunferencial (“skew”);
- distribuição radial do abatimento axial (“rake”) linear 15◦ ;
- contorno largo da pá junto à extremidade;
- secção das pás NSMB, indicada na Fig. 3.11.
Figura 3.11: Aspecto geométrico das pás da série B de Wageningen
Os parâmetros cuja variação sistemática foi considerada na realização desta série foram
os seguintes:
3.5. SÉRIES SISTEMÁTICAS
49
- o número de pás: 2 ≤ Z ≤ 7;
- a razão de área expandida: 0.3 ≤ AE /A0 ≤ 1.05;
- a razão passo-diâmetro: 0.5 ≤ P/D ≤ 1.4.
A nomenclatura dos hélices desta série, considerando a tı́tulo de exemplo um hélice B-4.85,
é a seguinte:
- Série B;
- Número de pás: 4;
- razão de área expandida: 0.85.
Para cada caso existe um diagrama, ou uma tabela com os já referidos coeficientes polinomiais, com as curvas caracterı́sticas dos diagrams de águas livres, para diferentes razões
passo-diâmetro, P/D. Na Fig. 3.12 está representado o caso dos hélices com duas pás, razão
de área expandida 0, 3 e razão passo-diâmetro compreendida entre 0, 5 e 1, 4.
3.5.2
Outras séries sistemáticas
A série sistemática de hélices propulsores Au é muito popular no Japão mas, fora dele, não
conseguiu uma divulgação semelhante à série de Wageningen podendo, no entanto, considerarse como uma série complementar daquela.
A série Gawn apresenta como caracterı́stica distintiva o maior diâmetro dos hélices que
a integram. Isto significa que muitos dos efeitos de escala presentes nas outras séries foram
aqui evitados ou, pelo menos, reduzidos. A série KCA, também designada por vezes como
Gawn-Burrill, é complementar da série de Gawn. São 30 hélices com 3 pás, também com
grande diâmetro, 400mm. Esta série foi ensaiada num tanque de cavitação, e não num tanque
de reboque, a diferentes números de cavitação e, consequentemente, permite verificar num
determinado projecto de aplicação os aspectos relacionados com o fenómeno da cavitação.
Os hélices da série de Lindgren, série Ma, são mais pequenos, 250mm, e as suas pás
têm passo constante. Foram testados num tanque de reboque e num tanque de cavitação e,
assim, resultou dos ensaios um extenso e integrado conjunto de dados adequado para a fase
preliminar do projecto.
A série de Newton-Rader compreende um conjunto limitado de 12 hélices com três pás
vocacionados para a propulsão de embarcações rápidas.
Para além destas séries sistemáticas de hélices simples, existem também alguns estudos
relativos a formas particulares de hélices como, por exemplo, as séries de hélices contrarotativos do MARIN e SSPA, ou a série de Wageningen de hélices com tubeira.
Figura 3.12: Diagrama em águas livres de um hélice da série sistemática
de Wageningen.
50
CAPÍTULO 3. PROPULSÃO
3.5. SÉRIES SISTEMÁTICAS
3.5.3
51
Diagrama de 4 quadrantes
No caso dos hélices de passo fixo, a forma convencional de operação do hélice, velocidade de
rotação positiva e velocidade de avanço nula ou positiva, corresponde ao funcionamento no
primeiro quadrante do diagrama de funcionamento.
No diagrama completo, ver Fig. 3.13, necessário por exemplo para estudar a manobrabilidade do navio ou o seu desempenho em marcha a ré, estão definidos quatro quadrantes, de
acordo o ângulo de avanço,
Va
−1
β = tan
(3.25)
0, 7 · π · n · D
Figura 3.13: Notação do diagrama com 4 quadrantes.
Como já referido, o primeiro quadrante corresponde a:
- velocidade de rotação do hélice correspondente à marcha a vante;
- velocidade do navio a vante;
- ou seja, ângulo de avanço 0 ≤ β ≤ 90◦ .
O segundo quadrante corresponde a:
- velocidade de rotação do hélice correspondente à marcha a ré;
- velocidade do navio a vante;
- ou seja, ângulo de avanço 90◦ < β ≤ 180◦ .
No terceiro quadrante, as condições de operação do hélice são:
- velocidade de rotação do hélice correspondente à marcha a ré;
52
CAPÍTULO 3. PROPULSÃO
- velocidade do navio a ré;
- ou seja, ângulo de avanço 180◦ < β ≤ 270◦ .
E, por fim, no quarto quadrante temos naturalmente:
- velocidade de rotação do hélice correspondente à marcha a vante;
- velocidade do navio a ré;
- ou seja, ângulo de avanço 270◦ < β < 360◦ .
Se existirem dados experimentais suficientes torna-se possı́vel definir uma função para
estimar o desempenho do hélice, no que diz respeito à força propulsiva e ao binário, nos
quatro quadrantes do diagrama em águas livres. Um exemplo de um diagrama deste tipo,
multi-quadrante, está representado na Fig. 3.14, relativo aos hélices da série de Wageningen
B4-70 com relação P/D entre 0, 5 e 1, 4.
Justifica-se a introdução de uma notação para obter maior flexibilidade para trabalhar
nestes diagramas multi-quadrante. De notar que para β = 90◦ ou β = 270◦ , situações em
que a velocidade de rotação do hélice é nula, o coeficiente de avanço resultaria J = ∞. De
forma semelhante, para prevenir o mesmo tipo de situações, são também definidos os seguintes
coeficientes:
- coeficiente de força propulsiva modificado,
CT∗ =
T
1 2
ρV A0
2 R
(3.26)
- coeficiente de binário modificado,
∗
CQ
=
Q
1 2
ρV A0 D
2 R
(3.27)
em que VR é a velocidade relativa de avanço para 0, 7R, ou seja,
T
i
CT∗ = π h
2
ρ Va + (0, 7πnD)2 D2
8
(3.28)
e
Q
∗
i
CQ
= π h
ρ Va2 + (0, 7πnD)2 D3
8
(3.29)
∗
Na Fig. 3.14 pode-se ver o efeito que a razão P/D tem no coeficiente de binário CQ
◦
◦
para praticamente toda a gama de β. Em particular, é nos intervalos 40 < β < 140 e
∗ varia mais significativamente.
230◦ < β < 340◦ que a magnitude de CQ
3.6. CAVITAÇÃO
53
Figura 3.14: Diagrama em águas livres de 4 quadrantes para os hélices
Wageningen B-4.70.
3.6
3.6.1
Cavitação
Origem da cavitação
A velocidade elevada do escoamento de água pelo hélice provoca regiões com baixa pressão.
Se a pressão cair o suficiente, formar-se-ão cavidades preenchidas com vapor. Estas cavidades
desaparecerão quando a pressão aumentar. O crescimento e o colapso destas “bolhas” é
extremamente rápido.
A cavitação envolve fenómenos fı́sicos complexos uma vez que se trata de escoamentos a
duas fases, com modelação não-linear. Nos hélices dos navios, a velocidade em torno das pás
pode ser suficiente para reduzir a localmente a pressão e desencadear a cavitação. Devido à
pressão hidrostática, a pressão total será superior nas imediações da pá que se encontre com
a máxima imersão (posição 06:00) do que naquela que se encontra na posição 12:00. Assim,
as pás dos hélices em cavitação alternadamente passarão por regiões em que tendencialmente
se formarão bolhas de cavitação e regiões onde as mesmas tenderão a colapsar.
Esta rápida sucessão de explosões e implosões nas proximidades das pás do hélice tem
várias consequências nefastas. As principais são:
- vibração;
54
CAPÍTULO 3. PROPULSÃO
Figura 3.15: Efeito da cavitação no valor dos parâmetros relativos a águas
livres.
- ruı́do;
- erosão da superfı́cie das pás (sobretudo se o colapso das bolhas ocorrer na proximidade);
- redução da força propulsiva.
No diagrama em águas livres da Fig. 3.15 está assinalada a redução que é tipicamente
provocada pela cavitação nos coeficientes de força propulsiva e binário.
3.6.2
Controle da cavitação
Num meio ideal, água sem impurezas ou ar dissolvido, a cavitação ocorrerá quando a pressão
total atingir localmente a pressão de vapor a essa temperatura. Na prática, a cavitação iniciase para valores de pressão superiores pela presença de partı́culas microscópicas e da existência
de ar dissolvido na água que facilitam e precipitam o inı́cio do processo de vaporização.
O número de cavitação σ é um parâmetro adimensional que estima a possibilidade de
aparecimento do fenómeno de cavitação num escoamento,
σ=
p0 − p
1
ρ V02
2
em que:
- p0 é a pressão ambiente de referência;
- p é a pressão local;
- e V0 é a velocidade de referência correspondente.
(3.30)
3.6. CAVITAÇÃO
55
Figura 3.16: Pressão de vapor da água em função da temperatura.
Para σ inferior a σv , o número de cavitação avaliado para a pressão de vapor pv , não
ocorrerá cavitação num fluido ideal. Na prática, é necessário considerar um coeficiente de
segurança, considerando uma pressão limite superior à pressão de vapor.
Para um hélice é habitual definir o número de cavitação σn como:
σn =
p0 − p
1
ρ n2 D2
2
(3.31)
adoptando-se como velocidade caracterı́stica nD.
3.6.3
Consideração da cavitação na selecção do hélice
O fenómeno da cavitação é predominantemente dominado pelo campo de pressão no escoamento da água pelo plano do hélice. Prevenir a cavitação passa consequentemente pelo
controlo da mı́nima pressão absoluta naquele escoamento. A possibilidade de ocorrência de
cavitação é evitada pela distribuição da força propulsiva por uma área maior, aumentando o
diâmetro do hélice ou a razão da área expandida AE / A0 . A forma mais usual de estimar,
ainda que de uma forma não completamente rigorosa, o perigo de ocorrência da cavitação
passa pela utilização do diagrama de Burrill (Fig. 3.17). O diagrama indica um limite inferior
para a área projectada do hélice de um navio mercante. Nos eixos do diagrama de Burrill estão o número de cavitação, em abcissas, e o coeficiente de Burrill nas ordenadas. O coeficiente
56
CAPÍTULO 3. PROPULSÃO
Figura 3.17: Diagrama de Burrill.
de Burrill é calculado por
τc =
T
q0,7R Ap
(3.32)
em que, Ap é a área projectada do hélice, e o parâmetro q0,7R é dado por
q0,7R =
1
ρ VR2
2
em que VR é o valor absoluto da velocidade local a 0, 7 do raio do hélice, ou seja,
q
VR = Va2 + (0, 7 π nD )2
com Va a velocidade de entrada do escoamento no plano do hélice.
Nos hélices da série de Wageningen, a área expandida está relacionada com a área projectada por
AE =
3.6.4
AP
1, 067 − 0, 229P/D
(3.33)
Ensaios experimentais
Os ensaios de cavitação, bem como frequentemente os ensaios em águas livres, realizam-se em
instalações que compreendem um canal fechado na qual é imposta a circulação da água por
um impulsor. Na Fig. 3.18 está representada esquematicamente uma instalação deste tipo.
Estes túneis são concebidos por forma a proporcionar um escoamento tão uniforme quanto
possı́vel na secção de teste. A secção de teste, o troço horizontal superior, dispõe de visores
para inspecção e vizualização do escoamento. O impulsor para a circulação da água está
3.6. CAVITAÇÃO
57
Figura 3.18: Instalações de ensaio do RINA.
colocado no troço inferior horizontal para garantir que, mesmo quando a pressão no tanque
for reduzida, a coluna hidrostática vai impedir a cavitação neste propulsor.
Normalmente, a pressão é reduzida por bombas de vácuo para ajuste do número de cavitação e a instalação dispõe de equipamento para reduzir o ar dissolvido na água. Podem ser
instaladas “grelhas metálicas” para induzir a turbulência desejada no escoamento.
Os hélices em teste são sujeitos a iluminação estroboscópica por forma a serem “vistos”
sempre com as pás na mesma posição. Obtém-se assim uma visualização do padrão de cavitação “estacionária”.
O funcionamento do hélice tem alguns pontos caracterı́sticos que se passa a identificar. A
primeira destas situações acontece quando o motor eléctrico faz rodar o veio do hélice a uma
velocidade n mantendo-se a velocidade de avanço nula, ou seja Va = 0. Nestas condições,
verifica-se J = 0 e η = 0, e diz-se que o hélice funciona a ponto fixo. Se em seguida se
fizer avançar o hélice a uma velocidade Va , mantendo a mesma velocidade de rotação, este
desenvolverá um impulso T e absorverá um certo momento Q. Esta fase é a fase propulsora,
utilizada para a propulsão dos navios. Continuando a aumentar o coeficiente de impulso por
diminuição da velocidade de rotação n, o impulso vai diminuindo até o hélice chegar ao ponto
de impulso nulo. Inicia-se a fase de travagem, até um ponto, no qual o hélice trabalha em
concordância com o coeficiente de avanço J, com KQ = 0, hélice livre. Um hélice livre opõe
resistência ao avanço. Continuando a reduzir a velocidade de rotação do hélice e mantendo
Va , entra-se na fase motora, em que o hélice poderia fornecer energia. Quando a velocidade
do hélice for nula, o hélice diz-se bloqueado.
58
CAPÍTULO 3. PROPULSÃO
Figura 3.19: Imagem da cavitação num hélice.
3.7
Selecção do hélice
No cálculo do hélice procura-se a optimização das principais variáveis, número e área das
pás, diâmetro, velocidade de rotação e passo, por forma a que a propulsão se faça com bom
rendimento em todas as condições de carga do navio. É possı́vel obter uma boa estimativa
das caracterı́sticas de funcionamento do hélice utilizando uma das várias séries sistemáticas
referenciadas. As variáveis de optimização do hélice são descritas sucintamente nos parágrafos
seguintes.
3.7.1
Variáveis de optimização
Diâmetro
O rendimento do hélice aumenta o diâmetro do mesmo, estando no entanto a dimensão
deste limitada pela geometria da popa. Deve-se referir no entanto que o aumento do diâmetro
de hélice provoca vibrações mais fortes e a redução do rendimento do casco. As sociedades
classificadoras têm normas próprias para definir valores mı́nimos de folga entre o hélice e o
casco do navio.
O diâmetro máximo do hélice é normalmente considerado como uma fracção do calado
máximo do navio,
Dmax = a T
(3.34)
dependente do tipo de navio, conforme indicado na Tab. 3.2.
Para compensar a não uniformidade do escoamento de aproximação ao hélice quando este
se encontra atrás da querena, o diâmetro equivalente em águas livres é considerado como:
D0 =
D
1−b
em que b toma os valores constantes na Tab. 3.3.
(3.35)
3.7. SELECÇÃO DO HÉLICE
59
Tipo de Navio
Graneleiros/Petroleiros
Porta-contentores
a
<0,65
<0,74
Tabela 3.2: Coeficiente para atribuição do diâmetro máximo do hélice pela
Eq. (3.34).
Hélice
Simples
Duplo
b
0.05
0.03
Tabela 3.3: Constante para o cálculo do diâmetro equivalente em água
livres pela Eq. (3.35).
Velocidade de rotação
Em instalações propulsoras com transmissão directa, a velocidade de rotação do hélice é
estabelecida pela velocidade do motor. Neste caso, o diâmetro é ajustado para se obter um
coeficiente de avanço apropriado para a velocidade pretendida e a potência exigida. Quando
é utilizada uma caixa redutora, procura-se utilizar o maior diâmetro possı́vel, sendo depois
ajustada a velocidade de rotação do hélice ajustada de acordo com o coeficiente de avanço
pretendido. Devem evitar-se velocidades que multiplicadas pelo número de pás do hélice
sejam próximas das frequências de ressonância do casco e da instalação propulsora. Do ponto
de vista da prevenção da cavitação, são favoráveis as velocidades de rotação mais baixas.
Número de pás
O factor determinante na selecção do número de pás é a irregularidade das forças geradas
pelo hélice. Estas forças, aplicadas com a frequência correspondente à velocidade de rotação,
induzem vibrações no casco e instalação propulsora. O objectivo passa por obter um bom
compromisso entre a vibração gerada e o rendimento obtido já que este diminui com o aumento
do número de pás do hélice.
Distribuição radial da pressão
A distribuição da pressão nas pás está relacionada com a susceptibilidade de ocorrência da
cavitação. Em particular, é normalmente vantajoso reduzir a pressão no extremo radial das
pás. Esta redução é ainda vantajosa na perspectiva do esforço estrutural das pás e da pressão
irregular induzida no casco.
Geometria das pás
A fórmula de Keller permite escolher a razão de área expandida para evitar o fenómeno da
cavitação,
Ae
(1, 3 + 0, 3Z) T
=
+k
A0
(p0 − pv ) D2
(3.36)
em que k é uma margem de segurança, que variará entre k = 0 para navios de guerra e
k = 0, 2 para navios mercantes com hélices muito carregados. Quanto maior a razão de áreas,
menor será o risco de cavitação mas, em compensação menor o rendimento do hélice devido
ao atrito. A solução será a menor área que garanta o critério de cavitação.
60
CAPÍTULO 3. PROPULSÃO
No entanto, a curvatura, o ângulo de ataque e a espessura das têm também uma grande
importância no controle da cavitação. A maior espessura das pás favorece a cavitação nas costas das pás enquanto que as pás pouco espessas têm maior propensão para gerarem cavitação
no bordo de ataque.
Quanto ao rendimento, ele é favorecido pela diminuição da corda das pás, ou seja da sua
área, mas por razões estruturais, esta redução tem que ser acompanhada por um aumento de
espessura que vai provocar um aumento da resistência de forma.
A utilização apropriada do desvio circunferencial das pás do hélice (“skew”) permite controlar muito eficazmente a cavitação e a vibração induzida tendo apenas como contrapartida
uma redução do rendimento do hélice em marcha a ré.
3.7.2
Tipos de problema
É possı́vel obter uma boa estimativa das caracterı́sticas de funcionamento do hélice utilizando
uma das várias séries sistemáticas referenciadas. Uma vez determinado o número e a área
das pás, resta a determinar a combinação do passo e do coeficiente de avanço que permite
optimizar o rendimento do hélice. De acordo com o tipo de problema em causa, podemos
considerar várias situações. Quando a potência e a velocidade de rotação são conhecidas, da
eliminação do diâmetro resulta a seguinte equação:
KQ
PD n2
=
J5
2πρVa5
(3.37)
Quando a potência e o diâmetro do hélice estão determinados, a eliminação da velocidade
de rotação permite estabelecer:
KQ
PD
=
3
J
2πρD2 Va3
(3.38)
Sendo prescritas a força propulsiva e a velocidade de rotação, a eliminação do diâmetro
conduz à equação:
KT
T n2
=
J4
ρVa4
(3.39)
Por fim, quando são conhecidos o diâmetro do hélice e a força propulsiva, a eliminação da
velocidade de rotação permite estabelecer a seguinte relação:
T
KT
=
2
J
ρD2 Va2
3.8
(3.40)
Interacção entre casco e hélice
Os ensaios de hélices à escala reduzida em águas livres, conseguindo efectuar uma avaliação
preliminar das caracterı́sticas propulsivas de um hélice, não permitem uma previsão do seu
desempenho numa dada aplicação especı́fica, porque, na realidade, o hélice não vai operar em
águas livres mas sim atrás do navio.
As caracterı́sticas de um hélice trabalhando atrás de um navio a uma dada velocidade
diferem consideravelmente das caracterı́sticas obtidas em ensaios com modelos em águas livres,
à velocidade correspondente, devido aos seguintes factores:
3.8. INTERACÇÃO ENTRE CASCO E HÉLICE
61
- a velocidade da água na esteira do navio é menor que a velocidade do navio;
- a não-uniformidade da esteira do navio afecta a distribuição das forças aplicadas nas
pás do hélice;
- a aceleração da água pelo hélice reduz a pressão sobre o casco e, consequentemente
aumentando a resistência efectiva da querena.
3.8.1
Ensaios de propulsão
Os ensaios de propulsão têm por objectivo determinar, para cada velocidade de rotação, a
potência propulsiva e a consequente velocidade do navio. Os resultados dos ensaios permitem
também a determinação dos coeficientes de dedução da força propulsiva e da velocidade da
esteira necessários para a selecção ou projecto do hélice. O modelo é equipado com um
hélice pré-seleccionado de acordo com as necessidades operacionais previstas para o navio. A
optimização a partir deste hélice-base decorrerá a partir dos resultados obtidos neste ensaio
de auto-propulsão. O accionamento deste hélice é normalmente realizado por um pequeno
motor eléctrico, conforme representado esquematicamente na Fig. 3.20.
Figura 3.20: Modelo para ensaios de propulsão.
As condições de realização do ensaio de propulsão contemplam:
- semelhança geométrica;
- semelhança cinemática;
- semelhança de Froude;
- igual número de cavitação.
Pelas razões apontadas anteriormente, não é possı́vel acumular com aquelas condicionantes a igualdade do número de Reynolds. Assim, existem efeitos de escala a considerar na
extrapolação dos resultados para a escala do navio.
O primeiro efeito de escala a considerar no ensaio de propulsão é o efeito de escala na
resistência. O coeficiente de resistência total é superior no teste do modelo ao que se verificará
no navio porque o coeficiente de resistência de atrito diminui com o aumento do número
62
CAPÍTULO 3. PROPULSÃO
de Reynolds. Este efeito resultante da variação do número de Reynolds é resolvido pela
aplicação de uma força de compensação. A intensidade da força de compensação necessária
FD é determinada por,
1
FD = ρ · Vm2 · Sm · ((1 + k) (cF m − cF s ) − cA − cAA )
2
(3.41)
O hélice tem portanto que produzir uma força propulsiva igual à resistência total RT menos
a força de compensação FD .
Outro efeito de escala a considerar no ensaio de propulsão diz respeito à esteira. A
espessura da camada limite e esteira do modelo é relativamente maior que a correspondente
espessura no navio. Ou seja, o coeficiente de esteira do modelo é maior que o do navio. A
velocidade média de aproximação ao hélice, adimensionalizada pela velocidade do modelo, é
menor que a correspondente velocidade adimensionalizada do navio.
Por último, deverá ser considerado o efeito de escala nas caracterı́sticas propulsivas do
hélice. De facto, o número de Reynolds do hélice no modelo é menor que no hélice do navio
e os coeficientes de força propulsiva e de binário são diferentes.
Na realização dos ensaios de propulsão é normalmente mantida a velocidade do “carro” de
reboque constante e é variada a velocidade de rotação do hélice até ser obtida uma condição
de equilı́brio. São assim obtidos dados de força propulsiva e binário em função da velocidade.
Adicionalmente, podem ainda ser registados dados sobre o calado e o caimento do modelo
durante o ensaio.
O ponto de auto-propulsão do modelo é encontrado quando as forças exteriores sobre o
modelo são nulas. O ensaio é realizado com o número de Froude do navio, fazendo variar a
velocidade de rotação do hélice até que a força de reboque se anule. Nesta situação, a força
propulsiva iguala a resistência da querena, alterada pela presença de hélice. Para compensar
a diferença no coeficiente de resistência do navio e do modelo, é aplicada a força adicional de
reboque FD determinada pela Eq. (3.41). É portanto mais correcto afirmar que no ponto de
auto-propulsão do modelo, a única força exterior aplicada ao modelo é a força FD .
Para além do chamado ensaio de auto-propulsão, realizam-se os ensaios em sobrecarga.
Cada ensaio em sobrecarga realiza-se também com o hélice a operar atrás do modelo com este
a ser rebocado a velocidade constante. Faz-se variar a velocidade de rotação do hélice e, para
cada uma das velocidades ensaiadas nm regista-se a força de reboque Fm , a força propulsiva
Tm e o binário Qm . Pode-se encontrar também o ponto de auto-propulsão do modelo por
interpolação nos resultados dos ensaios em sobrecarga, mais concretamente interpolando na
curva da força de reboque em função da velocidade de rotação, para o valor requerido de FD .
3.8.2
Potência e velocidade
A potência efectiva PE , potência necessária para rebocar a querena, sem os apêndices associados à propulsão, à velocidade Vs , é obtida por
PE = RT · Vs
(3.42)
em que:
- RT é a resistência total em águas livres excluindo a resistência adicional dos apêndices
associados à propulsão;
- e Vs é a velocidade do navio.
3.8. INTERACÇÃO ENTRE CASCO E HÉLICE
63
De forma análoga, a potência propulsiva PT pode ser obtida por
PT = T · V a
em que:
- T é a força propulsiva calculada a partir dos ensaios de propulsão;
- e Va é a velocidade de avanço do hélice.
A força propulsiva T é superior à resistência RT avaliada a partir do ensaio de resistência
realizado sem hélice. Isto significa, como referido antes, que a presença do hélice induz uma
resistência adicional porque:
- a presença do hélice aumenta a velocidade do escoamento na zona da popa do navio e,
em consequência a resistência de atrito;
- a presença do hélice provoca uma diminuição da pressão nos painéis da popa do navio.
O segundo destes factores é normalmente o mais significativo.
O aumento da resistência devido ao efeito da presença do hélice é usualmente representado
por uma redução da força propulsora expressa como fracção dessa força. O coeficiente de
dedução da força propulsiva t associa então a força propulsiva e a resistência,
t=1−
RT
T
(3.43)
em que t é normalmente considerado igual no modelo e no navio.
Depois de realizados os ensaios de propulsão e calculados os coeficientes de força propulsiva, KT m e KQm , o coeficiente de dedução da força propulsiva é calculado por
tm =
Tm + FD − RC
Tm
(3.44)
em que RC é a resistência corrigida para a diferença de temperatura entre os dois ensaios,
resistência e propulsão. O valor de RC será,
RC =
(1 + k) cF mC + cR
RT m
(1 + k) cF m + cR
(3.45)
em que cF mC é o coeficiente da resistência de atrito avaliado à temperatura da água no ensaio
de propulsão.
Para corrigir o efeito da velocidade da esteira, define-se o coeficiente de dedução da esteira,
w, que permite relacionar a velocidade de avanço Va com a velocidade do navio V ,
w =1−
Va
V
(3.46)
Considerando o diagrama em águas livres do hélice, com o valor de KT m avaliado com a
força propulsiva experimental do ensaio de propulsão, pode obter-se através daquele diagrama
um valor para o coeficiente de avanço J0m . O coeficiente de esteira do modelo será então dado
por
wm = 1 −
J0m Dm nm
Vm
(3.47)
64
CAPÍTULO 3. PROPULSÃO
Ou seja, a velocidade média axial no plano do hélice atrás do navio à velocidade V , no
ensaio de resistência sem hélice, é a velocidade da esteira nominal,
Va = (1 − wn ) V
(3.48)
e, com o hélice em operação atrás do navio, o escoamento devido à presença da querena é
modificado obtendo-se a velocidade da esteira efectiva,
Ve = (1 − we ) V
(3.49)
A velocidade total será a soma da velocidade da esteira efectiva e da velocidade axial induzida
pelo hélice.
O rendimento rotativo relativo ηR é calculado por
ηR =
KQ0m
KQm
(3.50)
em que KQ0m é obtido a partir do diagrama em águas livres do hélice e o coeficiente de binário
KQm é calculado com base nos resultados experimentais do ensaio de propulsão.
Designa-se por rendimento do casco a razão entre a potência efectiva e a potência propulsiva, ou seja,
ηH =
PE
RT · Vs
1−t
=
=
PT
T · Va
1−w
(3.51)
A determinação de w, t e ηH é feita preferencialmente através de ensaios de modelos em
ensaios de auto-propulsão utilizando um hélice de “stock ” com caracterı́sticas conhecidas, tão
aproximadas quanto possı́vel do hélice óptimo. Se não for possı́vel utilizar um modelo, aqueles
parâmetros poderão ser estimados com base em dados estatı́sticos. Para navios com um ou
dois hélices, o diagrama de Harvald permite estimar os valores de w, t e ηH em função do
coeficiente de finura total e da razão B/L, com correcções associadas ao tipo de popa, cota do
veio e diâmetro do hélice. Outros autores propuseram algumas expressões para a estimativa
daqueles parâmetros. Destas, destacam-se as de Taylor, Schoenherr e Luke, para navios com
um hélice,
w = 0, 5Cb + 0, 025
(3.52)
t = 0, 5w
(3.53)
e,
com ηH = 1, 02. Para navios com dois hélices,
w = 0, 4533Cb − 0, 114
(3.54)
t = 0, 7w + 0, 01
(3.55)
e,
com ηH = 0, 985. Poderão aqui ser referidas as expressões mais complexas apresentadas por
Holtrop, com base em mais de duzentos ensaios de auto-propulsão em modelos de navios de
diversos tipos.
3.8. INTERACÇÃO ENTRE CASCO E HÉLICE
65
A potência absorvida pelo hélice pode ser expressa em termos da velocidade de rotação n
(em rps) e do binário Q por
PD = 2π · n · Q
(3.56)
Devido às perdas mecânicas no veio e chumaceiras, a potência recebida pelo hélice PD é
inferior à potência efectiva do motor (’brake power’ ) PB ,
PD = ηs · PB
(3.57)
em que ηs é o rendimento da linha de veios. A eficiência do propulsor atrás do navio, avalia
as perdas desde a potência recebida pelo hélice PD e a potência propulsiva PT ,
PT = η B · PD
(3.58)
Esta eficiência do propulsor atrás do navio ηB é diferente da eficiência em águas livres η0
verificada experimentalmente. O rendimento rotativo relativo ηR avalia as perdas associadas
à diferença entre o escoamento em águas livres e o escoamento tridimensional não-uniforme
no plano do propulsor,
ηB = ηR · η0
(3.59)
Em resumo, verifica-se sempre a relação,
PB > PD > PT > PE
em que os valores daquelas potências são calculadas por
PE = ηH · PT = ηH · ηB · PD = ηH · η0 · ηR · PD = ηH · η0 · ηR · ηS · PB
Se o rendimento quase-propulsivo ηD espressar o conjunto de eficiências hidrodinâmicas
consideradas,
ηD = ηH · η0 · ηR
(3.60)
então, a potência efectiva pode ser dada por
PE = ηD · ηS · PB
As leis de semelhança permitem a extrapolação das medições efectuadas para a escala do
navio,
√
(3.61)
Vs = λVm ,
√
ns = nm / λ ,
(3.62)
Ts = Tm · (ρs /ρm ) · λ3
(3.63)
Qs = Qm · (ρs /ρm ) · λ4
(3.64)
e,
66
CAPÍTULO 3. PROPULSÃO
3.8.3
Extrapolação dos resultados do ensaio de propulsão
O procedimento recomendado pela ITTC para o tratamento dos dados experimentais resultantes dos ensaios de resistência e de propulsão para a previsão do desempenho do navio está
incluı́do no Apêndice A. Para além dos já referidos ensaios de reboque e propulsão, são ainda
necessários testes do hélice em águas livres. De uma forma sucinta, o referido procedimento
envolve os seguintes passos:
- prever a resistência total do navio a partir da resistência avaliada no modelo, corrigindo
de acordo com as resistências adicionais que devam ser consideradas;
- estimar as caracterı́sticas do hélice propulsor com base nos coeficientes propulsivos determinados para o modelo;
- estimar a esteira do navio e as condições de funcionamento do hélice;
- estimar a velocidade de rotação do hélice e potência necessária com base em factores de
correlação entre o modelo e o navio.
Os detalhes de cada um destes passos, bem como o formulário de cálculo, devem ser
consultados no referido Apêndice A.
As várias condições consideradas nos ensaios do modelo servirão para fazer uma previsão
do desempenho do navio numa gama de velocidades para as condições de lastro e carregado,
conforme representado na Fig. 3.21.
Figura 3.21: Resultados dos ensaios de propulsão.
Capı́tulo
4
Instalações Propulsoras
4.1
Introdução
A escolha de uma máquina propulsora ou da configuração mais apropriada para a instalação
propulsora num projecto de nova construção ou reconversão não é actualmente uma decisão
simples. É imperioso que esta decisão seja precedida de uma análise rigorosa das várias opções
disponı́veis para o perfil de operação futura definido para o navio.
Uma vez determinada a potência absorvida pelo hélice, torna-se necessário identificar as
soluções que satisfazem os requisitos de potência, velocidade de rotação, consumo e dimensões.
A sua avaliação técnico-financeira será então realizada por critérios baseados nos seguintes
factores:
- o investimento inicial;
- a fiabilidade;
- os custos de manutenção previstos;
- os custos de operação previstos;
- a margem do motor, relacionada com a diferença entre a potência máxima e a potência
de serviço do motor.
Este processo de selecção terminará sempre numa solução de compromisso já que nenhum
tipo de instalação apresentará apenas vantagens comparativas.
No passado, o armador ou o projectista tinha como escolha imediata um motor diesel lento
acoplado directamente a um hélice de passo fixo, ou um motor diesel de média velocidade,
a quatro tempos, accionando através de engrenagens redutoras um hélice de passo fixo ou
controlável.
Actualmente, a propulsão dos navios que entram em serviço é obtida com o acoplamento
directo, muito esporadicamente com engrenagens redutoras, de motores a dois tempos a hélices
de passo fixo ou controlável, motores de média velocidade a quatro tempos e engrenagens
redutoras ou ainda por instalações diesel-eléctricas com recurso a motores diesel, a quatro
tempos, rápidos ou de média velocidade. Algumas variantes de instalações propulsoras estão
representadas nas Fig. 4.1 e 4.2.
67
68
CAPÍTULO 4. INSTALAÇÕES PROPULSORAS
Figura 4.1: Variantes de instalações propulsoras diesel-mecânicas lentas e
de média velocidade.
Os motores diesel lentos predominam no sector do transporte de granéis, lı́quidos e sólidos,
e contentores de longo curso. Motores de média velocidade são preferidos em navios de
carga com menor dimensão, ferries, turismo de passageiros, RoRo’s, bem como em nichos de
mercado muito especı́ficos como os quebra-gelos, navios de apoio a plataformas de exploração
petrolı́fera, etc.
No passado recente, estas tradicionais zonas de influência de cada um dos referidos tipos
de motores têm-se sobreposto. As novas gerações de motores a quatro tempos, com cilindros
de grande diâmetro e média velocidade apresentam-se como soluções competitivas para navios
a operar em viagens de longo curso. Em contrapartida, os motores lentos a dois tempos com
cilindros de pequeno diâmetro também se apresentam como soluções válidas para os mercados
costeiro e fluvial.
Um aspecto fundamental a considerar no processo de decisão na escolha da instalação
propulsora será necessariamente o custo. Não só o custo inicial, o investimento a fazer na
aquisição do motor, mas também os custos associados à operação do navio ou, de uma forma
mais geral, os custos totais do ciclo de vida do navio. Naqueles custos de operação deverão
ser tidos em conta, entre outros, os seguintes aspectos:
- o tipo de combustı́vel que a instalação vai permitir consumir;
- uma previsão dos custos de manutenção;
- os recursos humanos exigidos para a operação/condução da instalação;
- a disponibilidade e quantidade/custo dos sobressalentes.
4.2. PROPULSÃO DIESEL-MECÂNICA
69
Figura 4.2: Instalações propulsoras diesel-mecânica (em cima) e dieseleléctrica (em baixo).
A avaliação dos custos de operação ao fim da vida de exploração do navio pode variar de
forma muito significativa com o tipo de motor escolhido, e com a configuração da instalação
propulsora adoptada.
A dimensão da casa da máquina, a cujo aumento corresponderá uma redução do espaço
de carga disponı́vel para a exploração do navio, é essencialmente condicionada pela dimensão
da máquina principal. A própria altura da casa da máquina é importante em alguns tipos de
navios como os ferries com convés para veı́culos.
4.2
Propulsão diesel-mecânica
Conforme já referido, a propulsão por um hélice de passo fixo accionado directamente por um
motor diesel lento a dois tempos continua a ser o sistema mais frequentemente encontrado em
navios de carga de longo curso. A ligeira redução no rendimento de propulsão reconhecida é
admitida face à simplicidade da solução obtida e, a introdução de motores de longo, super-,
e ultra-longo curso veio diminuir aquelas perdas. No entanto, a velocidade de 100/110 rpm
não é necessariamente a mais adequada para a propulsão de um grande navio. Os motores
actualmente disponı́veis com maior curso desenvolvem a sua potência nominal a velocidades
tão baixas como 55 rpm até cerca de 250 rpm. Para um dado navio, é então possı́vel prescrever
uma solução de acoplamento directo motor/hélice que permita optimizar o rendimento de
propulsão.
Um outro aspecto a considerar é o número de cilindros do motor. Os motores lentos actuais, com cilindros de grande diâmetro, permitem extrair a potência necessária à propulsão de
um navio de um motor com um reduzido número de cilindros. Um motor com menos cilindros
influencia naturalmente de forma favorável a dimensão da casa da máquina, o volume de trabalho afecto à sua manutenção e a quantidade de sobressalentes a manter no navio. Este tipo
de solução é portanto bem acolhida desde que daqui não resultem problemas de equilı́brio
do motor e vibrações. Estes motores com cilindros de grande diâmetro queimam bem combustı́veis pesados de fraca qualidade e proporcionam um consumo especı́fico de combustı́vel
70
CAPÍTULO 4. INSTALAÇÕES PROPULSORAS
inferior ao obtido em motores com cilindros de menor diâmetro.
Neste tipo de instalações, a energia eléctrica necessária ao funcionamento dos equipamentos auxiliares é normalmente fornecida por geradores accionados por motores diesel rápidos
ou de média velocidade. A grande parte dos fabricantes de motores diesel para accionamento de alternadores está já hoje em condições de oferecer soluções capazes de consumir o
mesmo combustı́vel que a máquina principal, ou “marine diesel-oil ” ou ainda uma mistura
(blended ) de combustı́veis pesado e destilado. Actualmente, são já comuns instalações propulsoras “Unifuel ”, nas quais máquina principal e motores auxiliares consomem o mesmo tipo
de combustı́vel.
4.2.1
Accionamento de auxiliares
Os custos associados à produção da energia eléctrica necessária ao funcionamento dos equipamentos auxiliares da instalação são também um factor importante na selecção da máquina
principal. O desenvolvimento das máquinas tem tido como principais objectivos nesta área:
- maximizar o aproveitamento de energia para permitir complementar a produção de
energia eléctrica durante as viagens;
- permitir o uso de alternadores accionados pela máquina principal através de engrenagens
multiplicadoras ou directamente montados na linha de veio;
- possibilitar o accionamento de equipamentos auxiliares directamente pela máquina principal.
A principal motivação para a produção de energia eléctrica a partir da máquina principal
resulta do seu superior rendimento térmico, menor consumo especı́fico de combustı́vel e capacidade para consumir combustı́veis de inferior qualidade e custo. Outra vantagem resulta
naturalmente do menor consumo de óleo lubrificante, de menos intervenções de manutenção e
inferiores custos com sobressalentes resultantes da redução do tempo de funcionamento obtida
com a paragem dos diesel-geradores durante a viagem.
No caso de uma instalação com hélice de passo fixo, a utilização de um acoplamento por
engrenagens, que permita manter constante a velocidade de rotação do alternador (Fig. 4.3),
possibilita a utilização do gerador a plena carga numa gama de velocidades da máquina
principal que habitualmente ronda os 70 a 100% da sua velocidade nominal.
A localização do alternador é também um aspecto importante para permitir a desejável
redução de espaço ocupado pela casa da máquina. São actualmente possı́veis diversos arranjos
que vão desde a colocação lateral ao motor ou em qualquer uma das suas extremidades.
Em alternativa, quer no caso das instalações com hélice de passo fixo, quer no caso daquelas
que dispõem de passo controlável, podem ser utilizados sistemas baseados na conversão da
frequência da energia eléctrica produzida (Fig. 4.4).
Mais recentemente, as opções para a produção de energia eléctrica a bordo alargaramse à utilização de turbinas movimentadas pelos gases de evacuação do motor. O elevado
rendimento dos sobrealimentadores mais modernos torna excedentária uma fracção dos gases
de evacuação. O aproveitamento destes gases de evacuação em pequenas turbinas poderá
integrar-se em sistemas, que contemplando ainda grupos diesel-geradores, geradores-ao-veio e
turbo-geradoras a vapor, de forma isolada ou combinada, permitirão a optimização dos custos
de produção da energia eléctrica para os vários estados de operação do navio.
4.2. PROPULSÃO DIESEL-MECÂNICA
71
Figura 4.3: Acoplamento com relação variável de velocidades.
4.2.2
Engrenagens redutoras
Em muitas instalações propulsoras espera-se da caixa redutora:
- a determinação da velocidade e do sentido de rotação do hélice, e a capacidade de
inversão;
- que proporcione uma forma de acoplamento, permitindo estabelecer e interromper a
transmissão de potência entre o motor e o hélice;
- que seja capaz de absorver o impulso recebido do hélice.
O projecto de engrenagens, embraiagens ou outras formas de acoplamento usadas em instalações navais têm de satisfazer vários, e por vezes conflituantes, requisitos quanto à sua
flexibilidade operacional, fiabilidade, ruı́do emitido e espaço ocupado. Os desenvolvimentos
nas áreas do projecto, dos materiais e dos sistemas de controlo contribuı́ram para soluções
inovadoras para instalações propulsoras versáteis com um ou mais motores, envolvendo tomadas de extração de potência (“Power Take-Off ’s - PTO”) para accionamento de alternadores
e tomadas para recepção de potência (“Power Take-In’s - PTI ”) para aumentar a potência
de propulsão.
A forma mais comum do accionamento indirecto do hélice passa pela utilização de um
ou mais motores a quatro tempos de média velocidade, ligados através de embraiagens e
acoplamentos a uma caixa redutora, para movimentar um hélice de passo fixo ou controlável
(Fig. 4.5 e 4.6).
A utilização de hélices de passo controlável permite eliminar a necessidade da reversibilidade do motor. Por outro lado, a utilização da caixa redutora permite escolher a velocidade
de funcionamento do hélice mais apropriada. De uma forma geral, pode-se afirmar que as perdas mecânicas na transmissão são compensadas por um maior rendimento propulsivo, quando
72
CAPÍTULO 4. INSTALAÇÕES PROPULSORAS
Figura 4.4: Conversão da frequência da energia eléctrica.
comparado com um caso de acoplamento directo para a mesma potência. Os custos adicionais da transmissão são também, pelo menos parcialmente, compensados pelo menor custo
do motor a quatro tempos, quando comparado com um motor lento a dois tempos.
São normalmente identificadas como principais vantagens das instalações propulsoras com
mais de um motor, rápido ou de média velocidade:
- a redundância permite maior disponibilidade para a operação do navio:
- no caso de avaria num motor, o outro ou os outros mantêm a navegabilidade;
- o número de motores em serviço para a propulsão pode variar para garantir a forma
mais económica para uma viagem:
- quando o navio viaja em lastro, carga parcial ou a velocidade reduzida um
dos motores pode ser utilizado à sua potência nominal, com bom rendimento,
enquanto outro ou outros podem ser parados;
- pelo contrário, em condições operacionais semelhantes, um motor único, acoplado directamente ao hélice, funcionaria durante longos perı́odos a carga parcial com pouco rendimento;
- A possibilidade de alterar o número de motores em serviço facilita o planeamento e a
execução das tarefas de manutenção e reparação uma vez que estas poderão ser realizadas em viagem.
- Esta flexibilidade de operação é particularmente valorizada numa época em que se
pretende uma exploração intensiva dos navios.
- As operações de manutenção e reparação podem ainda decorrer em porto sem
preocupações particulares relativas à necessidade de mudança de cais ou partida
antecipada.
- As instalações propulsoras de uma frota de navios pode ser baseada num só modelo
de motor, ajustando o número de motores no navio e o número de cilindros por motor
para as necessidades de propulsão de cada um dos navios, com redução do custo de
4.2. PROPULSÃO DIESEL-MECÂNICA
73
Figura 4.5: Instalação propulsora com quatro motores, engrenagens redutoras e dois hélices.
sobressalentes e inventários, para além dos benefı́cios resultantes da familiarização das
tripulações.
Este conceito pode ainda ser alargado aos motores auxiliares (“uniform machinery installations ”), em que os motores principais e auxiliares são do mesmo modelo.
4.2.3
Configuração ”pai-e-filho”
A flexibilidade de operação é potenciada pela adopção das instalações do tipo ”pai-e-filho”.
Nestas instalações, motores a quatro tempos do mesmo modelo, ou de dois modelos muito
semelhantes, mas com diferente número de cilindros, fazem o accionamento do veio do hélice
acoplados a uma caixa redutora comum. Cada um daqueles motores pode ser ainda acoplado
a uma máquina eléctrica que pode funcionar como motor ou gerador.
Numa configuração deste tipo, a propulsão pode ser assegurada:
- conjuntamente pelos dois motores diesel;
- apenas por qualquer um dos motores diesel.
Em qualquer dos casos, podem ser ainda utilizados os, nesta situação, motores eléctricos
acoplados ao veio como motores propulsores, alimentados com energia eléctrica produzida
pelos geradores auxiliares.
74
CAPÍTULO 4. INSTALAÇÕES PROPULSORAS
Figura 4.6: Instalação com dois motores diesel diferentes, engrenagens redutoras, embraiagens e geradores acoplados aos veios.
4.3
Propulsão diesel-eléctrica
4.3.1
Propulsão por motor eléctrico
A propulsão diesel-eléctrica, baseada em grupos electrogéneos de média velocidade, é uma
forma de accionamento indirecto com crescente implantação no mercado. Após um perı́odo
em que a utilização deste tipo de sistemas esteve confinada a nichos de mercado de actividades
com elevada especificidade, como por exemplo os quebra-gelos, navios de investigação etc.,
as mais recentes tecnologias para a conversão AC/DC alargaram o potencial de utilização da
propulsão eléctrica ao mercado dos navios de passageiros, “shuttle tanker’s” no Mar do Norte.
Estando já estabelecido como uma boa solução neste mercados, começam a surgir referências da aplicação deste tipo de instalações propulsoras a navios de transporte de quı́micos
(costeiro e longo curso), ferries e RoRo’s. Discute-se ainda as vantagens da sua aplicação
pelo menos a algumas classes de porta-contentores. A propulsão diesel-eléctrica, combinada
com motores “dual-fuel ”, está também bem implantada no sector do transporte de LNG.
A propulsão diesel-eléctrica exige grandes motores eléctricos para accionamento dos hélices (Fig. 4.7) e grupos electrogéneos para fornecer a potência eléctrica. Pode parecer em
primeira análise algo ilógico usar geradores eléctricos, conversores e motores eléctricos para o
accionamento quando um acoplamento directo ou uma engrenagem redutora pode ser suficiente para cumprir aquela missão. As principais razões que justificam a complexidade e custo
acrescidos daquele tipo de instalação são:
- maior flexibilidade na distribuição dos equipamentos na casa da máquina;
- maior diversidade de condições de fundionamento;
- funcionamento mais económico a carga partial;
- facilidade de controlo;
- menor ruı́do;
- maior segurança de operação e protecção ambiental.
Estes aspectos serão abordados nos parágrafos seguintes.
4.3. PROPULSÃO DIESEL-ELÉCTRICA
75
Figura 4.7: Motor eléctrico de propulsão.
Flexibilidade na distribuição dos equipamentos
A vantagem da transmissão eléctrica resulta de se poder escolher a localização em cada
caso mais apropriada para os grupos electrogéneos. É então possı́vel colocar os motores, bem
como os respectivos auxiliares, afastados do veio propulsor. Sempre que seja adoptado este
tipo de instalação, a referida flexibilidade permite aos arquitectos navais criar navios com a
casa da máquina muito compacta, libertando espaço para passageiros e/ou carga. O facto
de a casa da máquina ser mais compacta permite reduzir ainda a cablagem e a tubagem, em
particular a tubagem a instalar para a evacuação dos gases do motor (ver Fig. 4.8).
A opção por uma instalação diesel-eléctrica facilita também ao estaleiro de construção a
recepção de módulos de grupos electrogéneos pré-testados e prontos para serem incorporados
na instalação.
Deve aqui ser também referida a dificuldade de uma instalação diesel-eléctrica atingir o
rendimento obtido com um motor lento, a dois tempos, acoplado directamente ao veio do
hélice, quando a funcionar à sua carga ideal, tal como acontece numa viagem de longo curso
de um navio petroleiro. No entanto, alguns navios deste tipo têm um perfil de operação
que inclui também largos perı́odos a carga parcial em lastro, navegação em águas restritas
e manobras. Numa instalação diesel-eléctrica, a elevada disponibilidade para produção de
energia eléctrica pode ser aproveitada para movimentar as bombas de carga e impulsores de
proa/popa, conforme representado esquematicamente na Fig. 4.9.
Variedade de carga
Alguns tipos de navios necessitam de quantidades significativas de energia para auxiliares
quando as necessidades de propulsão são reduzidas. Uma grande instalação de produção
76
CAPÍTULO 4. INSTALAÇÕES PROPULSORAS
Figura 4.8: Instalação diesel-eléctrica.
de energia eléctrica nos navios de passageiros/cruzeiros é exigida pela carga dos serviços de
hotelaria e pelos propulsores tranversais de manobra. A potência eléctrica necessária nestes
casos ronda os 30 a 40 % da potência de propulsão instalada e ainda há que contar com
significativa redundância por motivos de segurança.
Estes factores têm promovido um novo conceito de instalação, a diesel-eléctrica ”power
station”, nas quais vários grupos electrogéneo movidos por motores diesel de média velocidade
satisfazem as necessidades de energia para a propulsão, manobra e serviços de hotelaria nos
grandes navios de passageiros.
Funcionamento económico a carga parcial
Funcionamento económico a carga parcial é facilmente alcançado numa instalação dieseleléctrica ”power station”. Uma instalação tı́pica inclui quatro grupos electrogéneos, podendo
ir no entanto até aos nove, e, através do funcionamento em paralelo dos grupos, é fácil ajustar
a capacidade de produção às necessidades de carga eléctrica. Por exemplo, no caso de quatro
geradores, aumentar o número de grupos em funcionamento de dois, à carga máxima, para
três a carga parcial resulta numa condição de carga a 67 % que, não sendo ideal também não
é problemática.
Os sistemas de redução instantânea da potência propulsora tornam desnecessário colocar
em funcionamento geradores a carga parcial para prevenir a ocorrência súbita de avaria num
grupo electrogéneo. O sistema de controlo monitoriza a capacidade de produção de energia
eléctrica, e a sobrecarga de um gerador provoca um ajuste imediato no consumo dos motores
de propulsão.
4.3. PROPULSÃO DIESEL-ELÉCTRICA
77
Figura 4.9: Representação esquemática de uma instalação diesel-eléctrica.
Facilidade de controlo
Os accionamentos eléctricos permitem alcançar, com larga margem, as necessidades de
controlo para um sistema de propulsão.
Baixo ruı́do
Um motor eléctrico proporciona um accionamento com vibrações reduzidas, caracterı́stica
particularmente valorizada nalguns tipos de navios como, por exemplo, os navios para cruzeiros, navios de investigação marinha e navios de guerra. A “transmissão eléctrica” permite
procurar a melhor localização para os motores por forma a minimizar os efeitos da vibração
transmitida à estrutura do navio. A emissão de vibrações pode ainda ser reduzida através do
recurso à montagem de amortecedores de vibração.
Protecção ambiental e segurança de operação
O controlo das emissões de óxidos de azoto pelos motores diesel dos navios favorece também
a especificação de instalações com “transmissão eléctrica”, uma vez que o funcionamento dos
motores a velocidade constante e carga optimizada permite obter menores emissões.
O aumento da segurança da navegação é também obtido nestas instalações pela redundância dos seus elementos constituintes. A redundância pode ser obtida não apenas pela
existência de dois propulsores mas ainda pode ser acrescida colocando os dois, ou mais, motores de propulsão em diferentes compartimentos e ligando-os por uma engrenagem redutora.
4.3.2
Propulsores azimutais
As vantagens técnicas e económicas na concepção, construção e operação de navios com
propulsão por “azipod’s”, inicialmente restritos a navios quebra-gelos e navios de passageiros,
têm vindo a alargar o seu campo de aplicação a outro tipo de navios.
Um propulsor azimutal incorpora o motor eléctrico num alojamento submerso de formas
hidrodinâmicas optimizadas que, podendo rodar 360◦ no plano horizontal, permite extraor-
78
CAPÍTULO 4. INSTALAÇÕES PROPULSORAS
dinária capacidade de propulsão e manobra (ver Fig. 4.10). O motor eléctrico é acoplado
directamente a um hélice de passo fixo. A energia eléctrica é provida pelos vários grupos
electrogéneos do navio.
Figura 4.10: Propulsores azimutais.
Este tipo de propulsores, quando comparados com instalações diesel-eléctricas com linha(s)
de veio(s) apresentam as seguintes vantagens:
- maior liberdade para a concepção do casco e para o arranjo de máquinas no interior da
casa da máquina;
- o espaço no interior do casco destinado aos motores pode ser libertado para outras
finalidades;
- melhor capacidade de manobra quando comparado com o tradicional leme e possibidade
de eliminar propulsores transversais;
- excelente reversibilidade e capacidade de manobra com propulsão a ré;
- menor ruı́do e vibração, caracterı́sticos da propulsão eléctrica, agora potenciados pela
posição mais favorável dos hélices;
- na construção do navio, as unidades de propulsão podem ser incorporadas mais tarde
reduzindo assim os custos de investimento;
- menor custo de produção do navio.
4.4
Selecção do motor
Seleccionado o tipo de instalação pretendido para a propulsão do navio, chega-se finalmente
à escolha do motor. Como as caracterı́sticas de funcionamento das turbinas e dos motores
4.4. SELECÇÃO DO MOTOR
79
eléctricos são bastante diferentes das caracterı́sticas dos motores diesel, a abordagem terá de
ser também diferente.
Em qualquer dos casos, deverá ser tida em conta a margem de serviço M S. A margem
de serviço tem em conta a diferença entre a potência requerida para nas condições ideais da
prova de mar e a potência requerida pelas condições de serviço. É prática habitual definir-se
a margem de serviço como uma fracção da potência na prova de mar, ou seja,
MS =
PDserv − PDtrial
PDtrial
(4.1)
O valor da margem de serviço está normalmente entre os 10 e os 25%, dependendo das opções
estratégicas do armador e da importância da pontualidade do serviço. Em princı́pio, a margem
de serviço atribuı́da a um navio de linha será superior à margem considerada para um navio
que vai operar no mercado do “tramping”. O valor estabelecido da margem de serviço deve em
conta uma estimativa da degradação de velocidade, para as condições de operação do navio,
bem com as condições habituais de mar e vento e a degradação do casco.
4.4.1
Turbinas e motores eléctricos
No caso da turbinas, de vapor ou gás, a potência desenvolvida depende essencialmente do
caudal de fluido em circulação, sendo portanto relativamente pouco sensı́vel à velocidade de
rotação.
As caracterı́sticas dos sistemas com transmissão eléctrica são semelhantes às das turbinas,
independentemente de os geradores serem movidos por turbinas ou motores diesel, uma vez
que a velocidade destes pode ser mantida constante.
Neste tipo de situação, em que a máquina propulsora pode trabalhar próximo da potência
máxima em qualquer condição de serviço, a potência instalada (PI ) pode ser próxima da
potência de serviço. Na prática, a turbina é ajustada para operar com o máximo rendimento
a uma potência 10% inferior à máxima potência em contı́nuo (MCR, Maximum Continuous
Rating). Assim, a potência instalada será
PI (M CR) =
PDserv
1 + MS
= PDtrial
0, 9ηs
0, 9ηs
(4.2)
em que PDserv e PDtrial são as potências absorvidas pelo hélice nas condições de serviço e na
prova de mar, respectivamente, para a velocidade de serviço e M S é a margem de serviço.
4.4.2
Motores diesel
Ao contrário das turbinas e dos motores eléctricos, em que a potência disponı́vel é pouco
sensı́vel à velocidade, os motores diesel caracterizam-se por ter uma curva do binário bastante
plana. Esta caracterı́stica faz com que a potência varie de forma aproximadamente linear com
a velocidade de rotação.
Para além dos principais critérios considerados na avaliação dos projectos, outros aspectos
que não devem ser descurados na escolha do motor são:
- a possibilidade de queimar combustı́vel pesado de baixa qualidade sem impacto nos
componentes do motor e consequentemente nos custos previstos para sobressalentes e
operações de manutenção;
80
CAPÍTULO 4. INSTALAÇÕES PROPULSORAS
- o volume de trabalho de manutenção, o número de cilindros, válvulas, camisas, aros
e chumaceiras a necessitar de atenção periódica em relação ao número de tripulantes
embarcados;
- a adequabilidade para operação não assistida explorando sistemas de controlo automático e sistemas de monitorização;
- a dimensão e o peso da instalação propulsora.
O valor máximo da potência desenvolvida por um motor diesel é condicionada pela carga
térmica. Este limite é normalmente expresso em termos da pressão média efectiva. Dependendo das caracterı́sticas do hélice seleccionado e das condições operacionais, assim o valor
limite da pressão média efectiva será atingido, ou não, antes de o motor atingir a velocidade
de rotação correspondente às condições M CR.
Figura 4.11: Diagrama de carga de um motor diesel
Os fabricantes de motores diesel incluem diagramas de carga nos guias de selecção de
motores para auxiliar a escolha do ponto de funcionamento. Nestes diagramas, como o representado na Fig. 4.11, estão marcados:
- o ponto L1 , que corresponde ao MCR do motor;
- a linha vertical L1 − L2 , velocidade de rotação máxima do motor, que limita a zona de
funcionamento do motor;
No Apêndice D incluiu-se documentação da ”Burmeister & Wain” que permite ilustrar a
forma de selecção do motor para uma aplicação concreta, considerando várias hipóteses: com
ou sem gerador acoplado ao veio, com hélice de passo fixo ou de passo controlável.
4.4. SELECÇÃO DO MOTOR
81
Alguns fabricantes anunciam um valor de “Normal Continuous Rating” (N CR) cerca de
10% inferior ao valor M CR e a uma velocidade inferior, ao qual corresponde um desempenho
optimizado do motor em termos de consumo e de necessidades de manutenção. Pode ainda
definir-se uma “Service Continuous Rating” (SCR) que, dependendo da polı́tica do armador,
poderá ser igual ou não do N CR indicado pelo fabricante do motor.
A diferença entre a M CR e a SCR, ou, caso não esteja definida, a N CR, dá origem à
chamada margem do motor (M M ). A margem do motor é avaliada por,
MM =
M CR − SCR
M CR
(4.3)
Valores tı́picos desta margem de motor rondam os 10 a 15%. De notar que as margens de
serviço e de motor surgem frequentemente combinadas numa só, a margem de serviço, apesar
de as suas origens serem bem distintas.
Uma vez atribuı́das as margens de serviço e de motor, a potência instalada é calculada
por
PI (M CR) = PDtrial
1 + MS
(1 − M M ) ηs
(4.4)
Nas provas de mar, nas condições de imersão e caimento contratuais, a potência absorvida
pelo hélice, à velocidade de rotação correspondente ao M CR, deve ser igual à potência SCR,
deduzida das perdas na linha de veios. Como objectivo das provas, deverá garantir-se que a
combinação motor e hélice permite que o anvio atinja a velocidade requerida sem ultrapassar
os limites impostos pelo diagrama de carga.
Sem prejuı́zo do exposto, o forte aumento do preço dos combustı́veis nos anos mais recentes faz com que os custos operacionais dos navios sejam cada vez mais dominados por este
factor. Neste contexto, pode ser uma hipótese de trabalho interessante a opção por um motor
com a mesma potência, a potência calculada como necessária para a propulsão nas condições contratuais, mas com um cilindro extra. Esta técnica, o chamado ”derating” do motor,
exigindo maior valor de investimento inicial, pode apresentar um perı́odo de retorno atractivo. Wettstein e Brown apresentam as principais motivações para aplicação desta técnica e
discutem quatro casos de aplicação numa publicação da Wärtsillä, incluı́da no Apêndice E.
82
CAPÍTULO 4. INSTALAÇÕES PROPULSORAS
Bibliografia
[1] José P. Saraiva Cabral. Arquitectura Naval, estabilidade, cálculos, avaria e bordo livre.
Centro do Livro Brasileiro, 1979.
[2] Eric C. Tupper. Introduction to Naval Arquitecture. Elsevier, 2004.
[3] Volker Bertram. Practical Ship Hydrodynamics. Butterworth-Heinemann, 2000.
[4] Jorge d’Almeida. Arquitectura Naval - o dimensionamento do navio. Prime Books, 2009.
[5] Editor Doug Woodyard. Pounders Marine Diesel Engines and Gas Turbines. ButterworthHeinemann, 2004.
[6] H. Schneekluth and V. Bertram. Ship Design for Efficiency and Economy. ButterworthHeinemann, 1998.
83
Índice Remissivo
de propulsão, 61
de resistência, 26
em sobrecarga, 62
Auto-propulsão, 62
Boca, 3
Bolbo de proa, 22
Bordo livre, 3
Calado, 3
Camada limite, 24
Cavitação, 37, 53, 60
Coeficiente
de avanço, 46
de binário, 46
de Burrill, 55
de carga do hélice, 44
de dedução da esteira, 63
de dedução da força propulsiva, 63
de força propulsiva, 46
de resistência, 28
de resistência total, 13
Comprimento
entre perpendiculares, 3
fora a fora, 3
na linha de água, 3
Consumo especı́fico de combustı́vel, 69
Custos
de manutenção, 68
de operação, 68, 69
totais, 68
Diagrama
de Burrill, 55
em águas livres, 45, 46
Dual-fuel, 74
Engrenagens redutoras, 71
Ensaios
de auto-propulsão, 62
de cavitação, 56
de hélices em águas livres, 45
Fórmula
de Alexander, 5
de atrito da ATTC, 25
de atrito da ITTC, 25
de Keller, 59
do atrito de Froude, 24
do atrito de Hugues, 30
Força
de compensação, 62
de inércia, 15
de origem hidrodinâmica, 16
gravı́tica, 16
propulsiva, 42
Hélice, 35
rendimento ideal, 45
a ponto fixo, 57
bloqueado, 57
com tubeira, 36
contrarotativo, 37
de passo controlável, 37, 67, 70, 71
de passo fixo, 37, 67, 70, 71, 78
diâmetro do, 58
distribuição radial de pressão, 59
geometria do, 40, 59
ı́ndice de qualidade do, 47
interacção com o casco, 60
número de pás do, 59
projecto do, 40
razão de área expandida, 41
supercavitante, 37
Método
de Hughes/Prohaska, 28
84
ÍNDICE REMISSIVO
Geosim, 28, 31
Hughes-Prohaska, 29
ITTC 1957, 28
ITTC 1978, 28, 30
Margem
de serviço, 79
do motor, 81
Maximum Continuous Rating, 79
Número
de cavitação, 54
de Froude, 17, 23
de Reynolds, 18, 27, 46
Navio
coeficientes de forma, 3
de passageiros, 68, 74, 76, 77
deslocamento do, 3
dimensões do, 3
linhas de bordo livre do, 3
planos do, 1
quebra-gelos, 68, 77
tipo ferry, 37, 38, 40, 68, 69, 74
tipo RoRo, 68, 74
tipo shuttle tanker, 74
Normal Continuous Rating, 81
PC-cluster, 10
Pontal, 3
Potência
absorvida, 65
de reboque, 13
efectiva, 13, 62
efectiva do motor, 65
propulsiva, 63
Power Take Off/In, 71
Profundidade restrita, 23, 32
Propulsão
azimutal, 35, 38, 77
cicloidal, 35, 39
diesel-eléctrica, 74
diesel-mecânica, 69
por jacto de água, 35, 37
por motor eléctrico, 74
Provas
de mar, 34
de potência, 121, 133
de velocidade, 121, 133
85
Rendimento
águas livres, 46
da linha de veios, 65
do casco, 64
do hélice, 46
rotativo relativo, 64
Resistência, 13
adicional, 31
aerodinâmica, 19
de atrito, 24
de onda, 19
decomposição, 18
dos apêndices, 32
viscosa de pressão, 25
Rugosidade do casco, 28, 30, 31
Série sistemática
60, 33
de hélices, 47, 58
de querenas, 32
de Taylor, 33
de Wageningen, 48
Semelhança
cinemática, 15
dinâmica, 15
geométrica, 14
leis da, 14
Service Continuous Rating, 81
Sobrealimentadores, 70
Tanque
de cavitação, 56
de Froude, 7
de reboque, 26
Unifuel, 70
Velocidade
da querena, 22
de aproximação, 42
de rotação do hélice, 59
económica, 22
Vibrações, 42, 53, 58–60, 77
86
ÍNDICE REMISSIVO
Apêndice
A
Procedimento Recomendado pela
ITTC para a Previsão do
Desempenho de Navios Baseada nos
Ensaios de Propulsão em Modelos
87
88
APÊNDICE A. PREVISÃO BASEADA NOS ENSAIOS DE PROPULSÃO
7.5 – 02
03 – 01.4
Page 1 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
Effective Date
1999
Revision
00
CONTENTS
1.
PURPOSE OF PROCEDURE
2.
DESCRIPTION OF PROCEDURE
2.1.1
Introduction for the Original 1978 ITTC Performance Prediction Method
for Single Screw Ships
2.1.2
Introduction for the 1978 ITTC Performance Prediction Method as Modified
in 1984 and 1987
2.2
Model Tests
2.3
Analysis of the Model Test Results
2.4
Full Scale Predictions
2.4.1
Total Resistance of Ship
2.4.2
Scale Effect Corrections for Propeller Characteristics.
2.4.3
Full Scale Wake and Operating Condition of Propeller
2.4.4
Model-Ship Correlation Factors
2.5
Analysis of Speed Trial Results
2.6
Input Data
2.7
Output Data
2.8
Test Example
3.
PARAMETERS
3.1
3.2
3.3
4.
VALIDATION
4.1
4.2
5.
Parameters to be Taken into Account
Recommendations of ITTC for Parameters
Input Data
Uncertainty Analysis
Comparison With Full Scale Results
ITTC- 1978 PERFORMANCE PREDICTION METHOD (COMPUTER CODE)
COMMENTS OF PROPULSION COMMITTE OF 22nd ITTC
In its original form the ITTC 1978 Performance Prediction Method offers a valuable and reasonably accurate prediction tool for reference purposes and conventional ships.
Edited by 22nd ITTC QS Group 1999
15th ITTC 1978 pp388 – 402
17th ITTC 1984 pp326 - 333
18th ITTC 1987 pp266 - 273
Date
Approved
15th ITTC 1978, 17th ITTC 1984
th
and 18 ITTC 1987
Date
7.5 – 02
03 – 01.4
Page 2 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
Effective Date
1999
Revision
00
1978 ITTC Performance Prediction Method
1.
PURPOSE OF PROCEDURE
more convenient use of the program. These
extensions are summarized as follows.
The method predicts rate of revolution and
delivered power of a ship from model results.
(1)
Inclusion of prediction of propeller revolutions on the basis of power identity.
2.
DESCRIPTION OF PROCEDURE
(2)
Temporary measure for wTS > wTM
2.1.1 Introduction for the Original 1978
ITTC Performance Prediction Method
for Single Screw Ships
(3)
Extension to twin screw ships
(4)
Addition of speed trial data
The method predicts rate of revolution and
delivered power of a ship from model results.
The procedure used can be described as follows:
(5)
Extension for the case of a stock propeller in the self-propulsion test
(6)
Adaptation to the input of the nondimensional resistance coefficient and
self-propulsion factors.
The viscous and the residuary resistance of the
ship are calculated from the model resistance
tests assuming the form factor to be independent of scale and speed.
The ITTC standard predictions of rate of revolutions and delivered power are obtained fromthe full scale propeller characteristics. These
characteristics have been determined by correcting the model values for drag scale effects
according to a simple formula. Individual
corrections then give the final predictions.
2.1.2 Introduction for the 1978 ITTC Performance Prediction Method as
Modified in 1984 and 1987
The 1978 ITTC Method developed to predict the rate of propeller revolutions and delivered power of a single screw ship from the
model test results has been extended during the
last two terms of the ITTC for a better and
In recent years, many member organizations
have been asked by their customers for a general description of the method, viz., model test
and analysis of their results, calculation of fullscale power and rate of propeller revolutions,
and the model-ship correlation factors used.
Considering the above, it was decided to prepare a user's manual of the 1978 ITTC method
which includes all of the extensions and modifications made.
2.2 Model Tests
Model tests required for a full scale comprise the resistance test, the self-propulsion test
and the propeller open-water test.
In the resistance test the model is towed at
speeds giving the same Froude numbers as for
the full scale ship, and the total resistance of
the model RTM is measured. The computer pro-
7.5 – 02
03 – 01.4
Page 3 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
gram accepts either RTM in Newton, or in a nondimensional form of residuary resistance coefficient CR assuming the form factor 1 + k. In
the latter case, the friction formula used can
then be either of the ITTC 1957, Hughes,
Prandtl-Schlichting or Schönherr's formulae.
The form factor 1 + k is usually determined
from the resistance tests at low speed range or
by Prohaska’s plot of CFM against Fn4
The ship model is not in general fitted with
bilge keels. In this case the total wetted surface
area of them is recorded and their frictional
resistance is added in calculating the full-scale
resistance of the ship.
In the self-propulsion test the model is
towed at speeds giving the same Froude numbers as for the full-scale ship. Generally a towing force FD is applied to compensate for the
difference between the model and the full-scale
resistance coefficient.
During the test, propeller thrust (TM), torque
(OM) and rate of propeller rotation (nM) are
measured.
In many cases, stock propellers are used
which are selected in view of the similarity in
diameter pitch and blade area to the full-scale
propeller. Then the diameter and the openwater characteristics of the stock propeller
have to be given as input data in the program.
In the open-water test, thrust, torque and rate of
revolutions are measured, keeping the rate of
revolutions constant whilst the speed of advance is varied so that a loading range of the
propeller is examined.
In the case when a stock propeller is used in
the self-propulsion test, both the stock propel-
Effective Date
1999
Revision
00
ler and the model similar to the full-scale propeller should be tested in open water.
2.3 Analysis of the Model Test Results
Resistance RTM measured in the resistance
tests is expressed in the non-dimensional form
C TM =
R TM
1
ρSV 2
2
This is reduced to residual resistance coefficient CR by use of form factor k,
viz.,
CR = CTM - CFM (1 + k)
Thrust, T, and torque Q, measured in the
self-propulsion tests are expressed in the nondimensional forms
K TM =
T
ρD 4 n 2
and
K QM =
Q
ρD 5 n 2
With KTM as input data, JTM and KQTM are read
off from the model propeller characteristics,
and the wake fraction
wTM = 1 −
J TM D M
V
and the relative rotative efficiency
K QTM
ηR =
K QM
are calculated. V is model speed.
The thrust deduction is obtained from
t=
T + FD − RC
T
7.5 – 02
03 – 01.4
Page 4 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
with
FD =
1
ρ M S M V M2 [C FM − (C FS + ∆C F )]
2
where RC is the resistance corrected for differences in temperature between resistance and
self-propulsion tests:
RC =
(1 + k ).C FMC + C R
(1 + k ).C FM + C R
RTM
where CFMC is the frictional resistance coefficient at the temperature of the self-propulsion
test.
2.4 Full Scale Predictions
2.4.1
Total Resistance of Ship
The total resistance coefficient of a ship
without bilge keels is
CTS =(1+k)CFS +CR+ ∆ CF +CAA
k
∆C F = 105 S
LWL
Effective Date
1999
Revision
00
1
3
− 0.6410 − 3
where the roughness kS=150.10-6 m and
- CAA, is the air resistance
A
C AA = 0.001. T
S
If the ship is fitted with bilge keels the total
resistance is as follows:
C TS =
S + S BK
[(1 + k )C FS + ∆C F ] + C R + C AA
S
2.4.2 Scale Effect Corrections for Propeller
Characteristics.
The characteristics of the full scale propeller are calculated from the model characteristics as follows
K TS = K TM − ∆K T
Where
-k
is the form factor determined from the
resistance test
- CFS is the frictional coefficient of the ship
according to the ITTC-1957 ship-model
correlation line
- CR is the residual resistance calculated from
the total and frictional coefficients of the
model in the resistance tests:
C R = C TM − (1 + k )C FM
-. ∆C F is the roughness allowance
K QS = K QM − ∆K Q
where
∆K T = − ∆C D .0.3.
P c.Z
D D
∆K Q = − ∆C D .0.25.
c.Z
D
The difference in drag coefficient ∆C D is
∆C D = C DM − C DS
where
7.5 – 02
03 – 01.4
Page 5 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
C DM
nS =
t 0.04
5
= 2 1 + 2
−
c (R ) 16 (R ) 23
nco
nco
C DS
(1 − wTS )V S
−2.5
In the formulae listed above c is the chord
length, t is the maximum thickness, P/D is the
pitch ratio and Rnco is the local Reynolds number at x=0.75. The blade roughness kp is put
kp=30.10-6 m. Rnco must not be lower than 2.105
at the open-water test.
PDS = 2πρD 5 n S3
the effective power:
PE = C TS 1 / 2 ρ .V S3 .S .10 −3
the total efficiency:
P
η D = DS
PE
-
the hull efficiency:
1− t
ηH =
1 − wTS
C TS
KT
S
=
.
J 2 2 D 2 (1 − t )(1 − wTS )2
With this K T / J 2 as input value the full
scale advance coefficient JTS and the torque
coefficient KQTS are read off from the full scale
propeller characteristics and the following
quantities are calculated
2.4.4
(kW)
(N)
(Nm)
ηR
-
where 0.04 is to take account of rudder effect.
The load of the full scale propeller is obtained
from
ηR
10 − 3
- the torque of the propeller:
K QTS
QS =
ρD 5 n S2 :
The full scale wake is calculated from the
model wake, wTM, and the thrust deduction, t:
(1 + k )C FS + ∆C F
(1 + k )C FM
K QTS
- the thrust of the propeller:
K
2
TS = T2 . J TS ρ .D 4 .n S2
J
-
- the rate of revolutions:
(r/s)
J TS D
2.4.3 Full Scale Wake and Operating Condition of Propeller
wTS = (t + 0.04 ) + (wTM − t − 0.04 )
Revision
00
- the delivered power:
and
t
c
= 21 + 2 1.89 + 1.62. log
c
kp
Effective Date
1999
(kW)
Model-Ship Correlation Factors
Trial prediction of rate of revolutions and delivered power with CP - CN corrections
if CHOICE=0 the final trial predictions will be
calculated from
nT = CN.nS
(r/s)
for the rate of revolutions and
PDT = CP.PDS
(kW)
7.5 – 02
03 – 01.4
Page 6 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
Effective Date
1999
Revision
00
2.5 Analysis of Speed Trial Results
for the delivered power.
Trial prediction with ∆CFC - ∆wC corrections
The analysis of trials data is performed in a
way consistent with performance prediction but
starting PD and n backwards, i.e. from
If CHOICE=1 the final trial predictions are
calculated as follows:
C TS + ∆C FC
KT
S
=
.
J 2 2 D 2 (1 − t )(1 − wTS + ∆wC )2
KQ =
JS is obtained from the full-scale open-water
characteristics KQ ≈ JS then
With this KT/J² as input value, JTS and KQTS
are read off from the full scale propeller characteristics and
nT =
(1 − wTS
+ ∆wC )V S
J TS .D
PDT = 2π . ρ .D 5 .n T3 .
K QTS
η RM
wT = 1 − J S .n.D / V
Further from KT ≈ JS characteristics
(r/s)
.10 − 3
T = K T . ρ .n ² D 4
CT =
(kW)
If CHOICE = 2 the shaft rate of rotation is predicted on the basis of power identity as follows.
1000.C P .PDS
=
3
T 2π . ρ .D ²V S (1 − wTS )³
K Q0
KQ
=
J³ J
.η RM
T
2.6 Input Data
Input data sheets are given in ENCL.1
2.7 Output Data
-
n S = V S (1 − wTS ) / J TS .D
nT = C NP n S
T .(1 − t )
1
. ρ .V ².S
2
Then we obtain
∆C FC = C T − C TS
∆wC = wTS − wT
Trial prediction with CNP correction
KQ
J³
PD
.η RM .10³
2π . ρ .D 5 .n 3
-
Output data I gives ITTC Standard Prediction with CP = CN = 1.0, together with
model and full scale propulsive coefficients (ENCL. 4).
Output data II gives the final ship prediction (ENCL. 5).
ITTC – Recommended
Procedures
-
7.5 – 02
03 – 01.4
Page 7 of 31
Performance, Propulsion
1978 ITTC Performance Prediction
Method
Effective Date
1999
propeller diameter
D = 8.2m
Output data III gives the analysis of the
speed trial results (ENCL. 6).
Revision
00
Calculations were carried out with the
ITTC Trial Prediction Test Program with:
2.8 Test Example
To illustrate the program a prediction was
made for a hypothetical ship with the following
particulars:
length between
perpendiculars
Lpp = 251.5m
breadth
B = 41.5m
draft
T = 16.5m
CP = 1.01
CN = 1.02
The input data were taken as shown in
ENCL. 1 and the printout of the input data and
results are given in ENCL. 4 - 6.
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
7.5 – 02
03 – 01.4
Page 8 of 31
Effective Date
1999
Revision
00
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
7.5 – 02
03 – 01.4
Page 9 of 31
Effective Date
1999
Revision
00
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
7.5 – 02
03 – 01.4
Page 10 of 31
Effective Date
1999
Revision
00
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
7.5 – 02
03 – 01.4
Page 11 of 31
Effective Date
1999
Revision
00
7.5 – 02
03 – 01.4
Page 12 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
3.
PARAMETERS
3.1 Parameters to be Taken into Account
Froude scaling law
ship-model correlation line ,friction line
kinematic viscosity
mass density
blockage
form factor
propeller loading
hull roughness
see also 3.3 Input Data
3.2 Recommendations of ITTC for Parameters
see 4.9-03-03-01.1 Propulsion Test
1987 p.263 In using the 1978 ITTC Method
it is recommended that the rudder(s) be fitted
in hull resistance experiments for barge type
forms where inflow velocity is relatively
large.
3.3 Input Data
All data are either non-dimensional or
given in SI-units.
Every data card defines several parameters
which are required by the program; each of
these parameters must be input according to a
specific format.
"I" format means that the value is to be input
without a decimal point and packed to the
right of the specified field.
Effective Date
1999
Revision
00
"F" format requires the data to be input with a
decimal point; the number can appear
anywhere in the field indicated.
"A" format indicates that alphanumeric characters must be entered in the appropriate
card columns.
The card order of the data deck must follow the order in which they are described
below.
Card No. 1 Identifications
Card
column
1- 8
9-16
Form
at
A
A
17-24
A
CC
Definition
Symbol
Project No.
Ship model No
Propeller model No.
-
25-32
F
SCALE Scale ratio
Card No. 2 Ship particulars
Card
column
9-16
17-24
25-32
33-40
41-48
Format
F
F
F
F
F
CC
Symbol
LWL
TF
TA
B
S
49-56
157-64
F
F
DISW
SBK
65-72
F
AT
72-80
F
C3
Definition
Length of waterline
Draft, forward
Draft, aft
Breadth
Wetted surface, without bilge keels
Displacement
Wetted surface of
bilge keels
Transverse projected
area of ship above
waterline
Form factor determined at resistance
tests
7.5 – 02
03 – 01.4
Page 13 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
Card No. 3 Particulars of full scale
Card
column
8- 8
Format
I
CC
Symbol
NOPROP
15-16
I
NPB
17-24
25-32
33-40
F
F
F
DP
PD075
CH075
41-48
F
TMO75
49-56
F
RNCHM
Definition
Number of propellers
should be 1 since method
is valid only for single
screw ships
Number of propeller
blades
Diameter of propeller
Pitch ratio at x=0.75
Chord length of Propeller
blade at x=0.75
Maximum blade thickness of propeller at
x=0.75
Reynolds number at
open-water test based on
chord length and local
velocity
π .0.75
V = VA 1 +
J
Card No. 4 General
Format
2.- 4
I
7- 8
I
9-16
17-24
25-30
F
F
F
31-36
F
36-41
48-48
F
I
CC Symbol
Definition
NOJ
Number of J-values in the
open-water characteristics
(J ≤ NOJ ≤ 10)
NOSP
Number of speeds in the
self- propulsion tests
(NOSPmax=10)
RHOM Density of tank water
RHOS Density of sea water
TEMM Temperature of resistance
test
TEMP Temperature at selfpropulsion test TEMS Temperature of sea water
CHOICE CHOICE=0 C − C
P
N
trial corr.
CHOICE==1:
∆C FC − ∆wC trial corr.
49-56
F
57-64
65-72
F
F
72-80
F
CP
Trial correction for shaft
power.
Trial correction for rpm
Trial correction for ∆C F
CN
DELT
CFC
DELTWC Trial correction for ∆w
Revision
00
Mean values of the trial correction figures,
Cp and CN can be obtained from the trial test
material of the individual institutions by running the ITTC Trial Prediction Test Program.
If an institution wishes to give predictions
with a certain margin the input CP-CN-values
must be somewhat higher than these mean
values.
Cards Nos. 5-14 Result of resistance and selfpropulsion tests and model propeller characteristics.
Card
column
1- 8
9-16
Format
F
F
CC
Symbol
VS
RTM
17-24
25-32
F
F
THM
QM
33-40
41-48
F
F
NM
FD
49-56
F
ADVC
57-64
F
KT
65-72
F
KQ
2
at x-0.75.
Card
column
Effective Date
1999
Definition
Ship speed in knots
Resistance of ship
model
Thrust of propeller
Torque of propeller:QM:100
Rate of revolution
Skin friction correction force
Advance coefficient,.
open water
Thrust coefficient,
open water
Torque coefficient,
open water
The J-margin in the open-water characteristics must be large enough to cover the
model and full scale J-values with some margin.
Input data sheets are given in ENCL. 1.
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
4.
VALIDATION
7.5 – 02
03 – 01.4
Page 14 of 31
Effective Date
1999
Revision
00
(13th 1972 pp.155-180) Empirical Power
Prediction Factor ( 1+X )
4.1 Uncertainty Analysis
not yet available
2) Propeller Dynamics Comparative Tests
(13th 1972 pp.445-446 )
4.2 Comparison With Full Scale Results
3) Comparative Calculations with the ITTC
Trial Prediction Test Programme
(14th 1975 Vol.3 pp.548-553)
The data that led to t ITTC-78 method can
be found in the following ITTC proceedings:
1) Proposed Performance Prediction Factors
for Single Screw Ocean Going Ships
4) Factors Affecting Model Ship Correlation
(17th 1984 Vol. 1, pp274-291)
7.5 – 02
03 – 01.4
Page 15 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
5.
C
C
C
C
C
C
C
C
C
C
C
Effective Date
1999
ITTC- 1978 PERFORMANCE PREDICTION METHOD (COMPUTER CODE)
****************************************************************************************************
*
*
*
1978 ITTC PERFORMANCE PREDICTION METHOD FOR SINGLE SCREW *
*
SHIPS
*
*
(REVISED 1983 TO INCLUDE TRIAL ANALYSIS AND TWIN SCREW SHIPS* *
*
*
****************************************************************************************************
DECLARATIONS
COMMON /A/ FILE(2),MODELS(2), MODELP(2), LPP,LWL,TF,TA,B,S,
*
SCALE,RNCHM,DISW,NOPROP,NPB,DP,PD075,CH075.
*
TM075,C3,SBK,AT,CP,CN,DELCF,DELWC,KSI,KPI,
*
RHOM,RHOS,TEMM,TEMP,TEMS,VS(10),RTM(10),THM(10),
*
QM(10),NM(10),ADVC(10),KT(10),KQ(10),THD(10),
*
FD(10),IC,NOJ,NOSP,PI
C
COMMON /B/ ETARM(10),ETAO(10),ETAH(10),ETAD(10),AWTM(10),
*
AWTS(10),ACFM(10),ACTM(10),AVS(10),AVM(10),
*
ATS(10),AQS(10),APDS(10),APE(10),APDT(10),
*
ANS(10),ANT(10),BPDT(10),BNT(10),KTSJ2(10),
*
KQS(10),KTS(10),ACTS(10)
DIMENSION FILE1(2),MODLS1(2),MODLP1(2)
C
500
501
502
503
504
600
Revision
00
REAL
LPP, LWL, KS1, KS, KP1, KP, NM1, NM, KT, KQ, KTM, KQ0, JTM,
*
KTSJ2, JTS, NS, KQTS, KTS, KQS, KQM
DATA
TRIAL /‘TRIA‘/
FORMAT(6A4,F8.0)
FORMAT(10F8.0)
FORMAT(2I4,9F8.0)
FORMAT(2I4,2F8.0,3F6.0,I6,4F8.0)
FORMAT(9F8.0)
FORMAT(/5X,’NUMBER OF ADV,KT AND KQ POINTS =’,15/
*
5X,’NUMBER OF SPEEDS
=’,15/
*
5X,’NUMBER OF SPEEDS OR ADVC POINTS >10’/)
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
C
C
C
CONSTANTS
G=9.81
PI=3.14159
KP1=30.0
KS1=150.0
KS=1.5E-4
KP=0.3E-4
C
C
READ INPUT DATA
C
1000 CONTINUE
READ(5,500,END=999) FILE,MODELS,MODELP,SCALE
READ(5,501) LPP,LWL,TF,TA,B,S,DISW,SBK,AT,C3
READ(5,502) NOPROP,NPB,DP,PD075,CH075,TM075,RNCHM
READ(5,503) NOJ,NOSP,RHOM,RHOS,TEMM,TEMP,TEMS
*
IC,CP,CN,DELCF,DELWC
NMAX=MAX0(NOJ,NOSP)
IF(FILE(1).EQ.TRIAL) GOTO 100
READ(5,504)(VS(I),RTM(I),THM(I),QM(I),NM(I),FD(I),
*
ADVC(I),KT(I),KQ(I);I=1,NMAX)
C
C
C
WRITE INPUT DATA
CALL OUTPUT(1)
C
C
C
CHECK
2
IF(NOJ.LE.10.AND.NOSP.LE.10) GOTO 2
WRITE(6,600) NOJ.NOSP
GOTO 1000
CONTINUE
7.5 – 02
03 – 01.4
Page 16 of 31
Effective Date
1999
Revision
00
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
C
C
C
RECALCULATION OF INPUT DATA
....3
C
C
C
CORRECTION OF PROPELLER CHARACTERISTICS
4
C
C
DO 3 I=1,NOJ
KT(I)=KT(I)*0.1
KQ(I)=KQ(I)*0.01
CONTINUE
DELCF=DELCF*0.001
RNCHM=RNCHM*100000.
VISCP=((0.585E-3*(TEMP-12.0)-0.03361)*(TEMP-12.0)+
*
1.2350)*1.0E-6
VISCM=((0.585E-3*(TEMM-12.0)-0.0361)*(TEMM-12.0)+
*
1.2350)*1.0E-6
VISCS=((0.659E-3*(TEMS-1.0)-0.05076)*(TEMS-1.0)+
*
1.7688)*1.0E-6
CDM=2.0*(1.0+2.0*TM075/CH075)*(0.044/RNCHM**0.16667*
5.0/RNCHM**0.66667)
CDS=2.0*(1.0+2.0*TM075/CH075)/(1.89+1.62*ALOG10(CH075
*
/KP))**2.5
DCD=CDM-CDS
DKT=-0.3*DCD*PD075*CH075*NPB/DP
DKQ=0.25*DCD*CH075*NPB/DP
DO 4 I=1,NOJ
KTS(I)=KT(I)-DKT
KQS(I)=KQ(I)-DKQ
KTSJ2(I)=KTS(I)/ADVC(I)**2
CONTINUE
DO 5 I=1,NOSP
VS1=VS(I)*0.15444
VM1=VS1/SQRT(SCALE)
NM1=NM(I)
7.5 – 02
03 – 01.4
Page 17 of 31
Effective Date
1999
Revision
00
7.5 – 02
03 – 01.4
Page 18 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
C
C
Effective Date
1999
CALCULATE ROUGHNESS ALLOWANCE AND SHIP TOTAL RESISTANCE
RNLP=LWL*VM1/(VISCP*SCALE)
RNLM=LWL*VM1/(VISCM*SCALE)
RNLS=LWL*VS1/VISCS
CFMC=0.075/(ALOG10(RNLP)-2)**2
CFM=0.075/(ALOG10(RNLM)-2)**2
CFS=0.075/(ALOG10(RNLS)-2)**2
CTM=RTM(I)*SCALE**3/(0.5*RHOM*VS1**2*S)
CR=CTM-(1.0+C3)*CFM
RTMC=RTM(I)*(1.0+C3)*CFMC+CR)/((1.0+C3)*CFM+CR)
THD(I)=(THM(I)+FD(I)-RTMC)/THM(I)
DELCF=(105.0*(KS/LWL)**0.33333-0.64)*0.001
CAA=0.001*AT/S
CTS=((1.0+C3)*CFS*DELCF)*(S+SBK)/S+CR+CAA
C
C
C
MODEL PROPULSIVE COEFFICIENTS
FNOP=NPROP
KTM=(THM(I)/FNOP)/(RHOM*(DP/SCALE)**4*NM1*NM1)
KQM=(QM(I)*0.01/FNOP)/(RHOM*(DP/SCALE)**5*NM1*NM1)
JTM=APOL(0,KT,ADVC,NOJ,KTM,IX)
KQ0=APOL(0,ADVC,KQ,NOJ,JTM,IX)
WTM=1.0-JTM*DP*NM1/(VM1*SCALE)
C
C
C
FULL SCALE WAKE
5
6
7
C
C
C
SAVE AREAS
8
C
C
IF(JRUDER) 6,5,6
WTS=(THD(I)+0.04)+(WTM-THD(I)-0.04)*((1.0+C3)*CFS+DELCF)/
*
((1.0+C3)*CFM)
GOTO 7
WTS=(THD(I) )+(WTM-THD(I) )*((1.0+C3)*CFS+DELCF)/
*
((1.0+C3)*CFM)
GOTO 7
IF(WTS.GT.WTM) WTS=WTM
ETARM(I)=KQ0/KQM
ACTM(I)=CTM
ACFM(I)=CFM
AWTM(I)=WTM
AWTS(I)=WTS
ACTS(I)=CTS
AVS(I)=VS1
AVM(I)=VM1
CONTINUE
ITTC STANDARD PREDICTION
Revision
00
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
C
CALL IP
C
C
C
RETURN FOR NEW INPUT
DO 20 I=1,2
FILE1(I)=FILE(I)
MODLS1(I)=MODELS(I)
20
MODELP1(I)=MODELP(I)
SCALE1=SCALE
GOTO 1000
C
100 CONTINUE
DO 110 I=1,2
FILE(I)=FILE1(I)
MODELS(I)=MODLS1(I)
MODELP(I)=MODLP1(I)
SCALE=SCALE1
110
C
CALL ANLSYS
C
C
C
C
RETURN FOR NEW INPUT
GOTO 1000
999 STOP
END
C
7.5 – 02
03 – 01.4
Page 19 of 31
Effective Date
1999
Revision
00
7.5 – 02
03 – 01.4
Page 20 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
Effective Date
1999
Revision
00
C
C
*****************************************************************************************************
***
C
C
C
C
C
C
C
C
OUTPUT IS USED FOR PRINTING INPUT DATA AND RESULTS
IOUT= 1
2
3
INPUT DATA IS PRINTED
RESULT PAGE 1
RESULT PAGE 2
*****************************************************************************************************
***
C
SUBROUTINE OUTPUT(IOUT)
COMMON /A/ FILE(2),MODELS(2),MODELP(2),LPP,LWL,TF,TA,B,S
*
SCALE,RNCHM,DISW,NOPROP,NPB,DP,PD075,CH075,
*
TM075,C3,SBK,AT,CP,CN,DELCFC,DELWC,KSI,KPI,
*
RHOM,RHOS,TEMM,TEMP,TEMS,VS(10),RTM(10);THM(10),
*
QM(10),NM(10),ADVC(10),KT(10),KQ(10),THD(10),
*
FD(10),IC,NOJ,NOSP,PI
C
COMMON /B/ ETARM(10),ETA0(10),ETAH(10),ETAD(10),AWTM(10),
*
AWTS(10),ACFM(10),ACTM(10),AVS(10),AVM(10),
*
ATS(10),AQS(10),APDS(10),APE(10),APDT(10),
*
ANS(10),ANT(10),BPDT(10),BNT(10),KTSJ2(10),
*
KQS(10),KTS(10),ACTS(10)
C
REAL
LPP,LWL,KS1,KS,KP1,KP,NM1,NM,KT,KQ,KTM,KQ0,JTM,
KTSJ2,JTS,NS,KQTS,KTS,KQS
DIMENSION TEXT (16)
DATA TEXT /’INPU’,’T DA’,’TA ‘,’ ‘,
*
‘OUTP’,’UT D’,’ATA ‘,’1 ‘,
*
‘OUTP’,’UT D’,’ATA..’,’2 ‘;
*
`TRIA`,`L AN`,ÀLYS`,ÌS `/
600 FORMAT(‘1’,19X,’1978 ITTC PERFORMANCE PREDICTION’,10X,
*
‘ENCL:’/
C?? *
20X,’METHOD
‘,8X,
*
‘REPORT:’/20X,4A4/)
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
602
603
604
605
601 FORMAT(5X,’IDENTIFICATION
:’,18X,’SHIP:’//
*
5X,‘PROJECT
:’,2A4,
*
10X,’LENGTH PP
:’,F8.2,’ (M)’/
*
5X,’SHIP MODEL’
:’,2A4,
*
10X,’LENGTH WL
:’,F8.2,’ (M)’/
*
5X,’PROPELLER MODEL :’,2A4,
*
10X,’DRAFT FWD
:’,F8.2,’ (M)’/
*
5X,’SCALE FACTOR
:’,F8.2,
*
10X,’DRAFT AFT
:’,F8.2,’ (M)’/
*
43X,’BREADTH
:’,F8.2,’ (M)’/
*
5X,’PROPELLER:’,
*
28X,’WETTED SURFACE :’,F8.0,’ (M**2)’/
*
43X,’DISPLACEMENT
:’,F8.0,’ (M**3)’)
FORMAT(5X,’NUMBER OF PROPELLERS:’,I8/
*
5X,’NUMBER OF BLADES
:’,I8,
*
6X,’FRICTION COEFFICIENT CF’/
*
5X,’DIAMETER
:’,F8.3,’ (M)’,
*
2X,’CALCULATED ACCORDING TO ITTC-57’/
*
5X,’PITCH RATIO 0.75R
:’,F8.4,
*
6X,’FORM FACTOR :’,F6.3,’ (BASED ON ITTC-57)’/)
FORMAT(5X,’HULL ROUGHN.*10**6
:’,F6.1,’ (M)’,
*
2x,’BILGE KEEL AREA
:’,F6.1,’ (M**2)’,
*
5X,’PROPELLER BLADE ROUGHN.*10**6:’,F6.1,’ (M)’,
*
2X,’PROJ.AREA ABOVE WL. :’,F6.1,’ (M**2)’/)
FORMAT(5X,’CHORD LENGTH OF PROP.BLADE AT X=0.75:’,
*
F7.4,’ (M)’/
*
5X,’THICKNESS OF PROP.BLADE
AT X=0.75:’,
*
F7.4’ (M)’/)
FORMAT(5X,’DENSITY OF WATER (TANK
) :’F7.1,
*
‘ (KG/M**3)’/
*
’DENSITY OF WATER (SEA
) :’F7.1,
*
‘ (KG/M**3)’/
*
5X,’TEMP. OF WATER (RESISTANCE TEST) :’F7.2,
*
‘ (CENTIGRADES)’/
*
5X,’TEMP. OF WATER (SELF PROP. TEST) :’F7.2,
*
‘ (CENTIGRADES)’/
*
5X,’TEMP. OF WATER (SEA
) :’F7.2,
*
‘ (CENTIGRADES)’//
*
5X,’MODEL TEST RESULTS:’,
*
30X,’OPEN WATER CHARACT.;’/
*
54X,’RNC :’’F5.2,’*10**5’/)
7.5 – 02
03 – 01.4
Page 21 of 31
Effective Date
1999
Revision
00
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
7.5 – 02
03 – 01.4
Page 22 of 31
Effective Date
1999
606 FORMAT(5X,’SHIP RESIS- FRICT. THRUST TORQUE RATE OF ‘,
*
2X,’ADVANCE THRUST TORQUE’/
*
20X,’REVS. RATIO COEFF. COEFF.’/
*
5X,’KNOTS
N
N
N
NM
RPS ’,
*
7X,’J
10*KT
100*KQ’/)
607 FORMAT(1X)
608 FORMAT(‘+’,3X,F5.1,1X,F7.1,1X,F7.2,2X,2F7.1,F9.2)
609 FORMAT(‘+’,49X,F10.3,F7.3,F8.3)
610 FORMAT(5X,’SHIP MODEL:’//
*
8X,’SPEED RES. COEFF. FRICT. COEFF. THRUST DED.’,
*
2X,’MEAN REL.ROT.’/
*
6X,’VS
VM
TOTAL’,32X, ‘WAKE
EFFIC.’/
*
5X,’KNOTS M/S
CTM*1000
CFM*1000’,8X,’TM’,
*
7X,’WTM
ETARM’/)
611 FORMAT(4X,F5.1,F7.3,F8.3,6X,F7.3,7X,F7.3,3X,F7.3,F8.3)
612 FORMAT(/5x,’ITTC STANDARD PREDICTION CP=CN=1.0 :’//
*
5X,’SPEED EFF. POWER DELIV. POWER RSATE OF REVS’,
*
2X,’ THRUST TORQUE’/
*
6X,’VS’,7X,’PE’,10X,’PD’,12X,’N’,10X,’T’,8X,’Q’/
*
5X,’KNOTS’,5X,’KW’,10X,’KW’,11X,’RPS’,9X,’KN’,
*
6X,’KNM’/)
613 FORMAT(4X,F5.1,F10.0,3X,F9.0,4X,F9.3,3X,F9.0,F8.0)
614 (FORMAT(/5X,’SPEED TOT. EFF. PROP.EFF. HULL EFF. SHIP WAKE’,
*
3X,’OPEN WATER CHAR. FULL SCALE:’/
*
5X,’KNOTS ETAD
ETA0 ETAH’,/X,’WTS’,
*
9X,’J
10*KT
100*KQ’/)
615 FORMAT(‘+’,3X,F5.1,F8.3,3(3X,F7.3))
616 FORMAT(‘+’,50X,3F7.3)
617 FORMAT(/5X,’SHIP DELIVERED POWER
RATE OF REVS.’/
*
5X, ‘SPEED -----------------------------------------------‘/
*
5X,’KNOTS KW
HP
RPS
RPM’/)
618 FORMAT(4X,F5.1,2X,2F8.0,3X,F7.3,F8.2)
619 FORMAT(/5X,’SHIP TRIALS PREDICTION CP=’,F7.3,’ CN=,F7.3)
620 FORMAT(/5X,’SHIP TRIALS PREDICTION DELCFC*1000=’,
*
F6.3,’ DELCW=’,F6.3)
ITEX=ICUT*4-4
WRITE(6,600) (TEXT(ITEX+1),I=1,4)
WRITE(6,601) FILE,LPP,MODELS,LWL,MODELP,TF,SCALE,TA,B,S,DISW
WRITE(6,602) NOPROP,NPB,DP,PD075,C3
C
GOTO(10,20,30,40) , IOUT
Revision
00
7.5 – 02
03 – 01.4
Page 23 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
C
C
C
Effective Date
1999
INPUT DATA IS LISTED
10 CONTINUE
WRITE(6,603) KS1,SBK,KP1,AT
WRITE(6,604) CH075,TM075
WRITE(6,605) RHOM,RHOS,TEMM,TEMP,TEMS,RNCHM
WRITE(6,606)
NMAX=MAX0(NOJ,NOSP)
DO 1 I=1,NMAX
WRITE(6,607)
IF(I. LE. NOSP) WRITE(6,608) VS(I);RTM(I);FD(I),THM(I),
QM(I),NM(I)
IF(I. LE.NOJ) WRITE(6,609)
ADVC(I),KT(I),KQ(I)
1 CONTINUE
RETURN
C
C
C
RESULTS PAGE 1
20 CONTINUE
WRITE(6,610)
DO 21 I=1,NOSP
CFM=ACFM(I)*1000.0
CTM=ACTM(I)*1000.0
WRITE(6,611) VS(I),AVM(I),CTM,CFM,THD(I),AWTM(I),ETARM(I)
21 CONTINUE
WRITE(6,612)
DO 22 i=1,NOSP
WRITE(6,613) VS(I),APE(I),APDS(I),ANS(I),ATS(I),AQS(I)
22 CONTINUE
WRITE(6,614)
DO 23 i=1,NMAX
WRITE(6,607)
IF(I.LE.NOSP) WRITE(6,615)
VS(I),ETAD(I),ETA0(I),ETAH(I);
AWTS(I)
XKTS=KTS(I)*10.0
XKQS=KQS(I)*100.0
IF(I.LE.NOSP) WRITE(6,616)
ADVC(I),XKTS,XKQS
23 CONTINUE
RETURN
Revision
00
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
C
C
C
7.5 – 02
03 – 01.4
Page 24 of 31
Effective Date
1999
Revision
00
RESULTS PAGE 3
30 CONTINUE
DCFC=DELCFC*1000.0
IF(IC.EQ.1) WRITE(6,620)DCFC,DELWC
IF(IC.NE.1) WRITE
(6,619) CP,CN
WRITE(6,617)
DO 31 I=1,NOSP
WRITE(6,618)VS(I),APDT(I),BPDT(I),ANT(I),BNT(I)
31 CONTINUE
....40 RETURN
END
C
C
*****************************************************************************************************
***
C
C
C
C
C
C
C
C
C
C
IRAT= 0
=1
X
=
Y
=
N
=
EX
=
IFEL =
INTERPOLATION WITH A 2:ND DEGREE POLYNOMIAL
INTERPOLATION WITH A RATIONAL FUNCTION OF 2:ND DEGREE
ARGUMENT ARRAY
VALUE ARRAY
NUMBER OF ARGUMENTS
ARGUMENT
ERROR RETURN CODE
*****************************************************************************************************
***
C
REAL FUNCTION APOL(IRAT,X,Y,N,EX,IFEL)
DIMENSION X(1),Y(1)
C
C
C
CHECK NUMBER OF POINTS > 2
IFEL=0
IF(X(1).GT.X(N)) GOTO 2
IF(X(1).GT.EX.OR.X(N).LT.EX) GOTO 7
DO 1 I=1,N
L=1
IF(EX-X(I)) 4,4,1
1 CONTINUE
GOTO 4
2 CONTINUE
IF(X(1).LT.EX.OR.X(N).GT.EX) GOTO 7
DO 3 I=1,N
L=I
IF(EX-X(I)) 3,4,4
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
3 CONTINUE
4 CONTINUE
M=2
IF(L.EQ.1) M=1
IF(L.EQ.3) M=3
LM=L-M
X1=X(LM+1)
X2=X(LM+2)
X3=X(LM+3)
Y1=Y(LM+1)
Y2=Y(LM+2)
Y3=Y(LM+3)
C
C
C
INTERPOL. 2:ND DEGREE POLYNOMIAL
6
C
C
C
7
8
X21=X2-X1
X31=X3-X1
X32=X3-X2
IF(IRAT.EQ.1) GOTO 6
C1=Y1
C2=(Y2-C1)/X21
C3=(Y3-C1-C2*X31)/(X31*X32)
APOL=C1+(EX-X1)*(C2+C3*(EX-X2))
RETURN
CONTINUE
INTERPOL. RAT. FUNCTION
Y21=Y2*X2*X2-Y1*X1*X1
Y32=Y3*X3*X3-Y2*X2*X2
A0=(Y32-X32*Y21/X21)/(X32*X31)
B0=(Y21/X21-A0*(X1+X2)
C0=((Y1-A0)*X1-B0)*X1
APOL=(C0/EX+B0)/EX+A0
RETURN
CONTINUE
WRITE(6,8)
FORMAT(/5X,’INCREASE THE J-RANGE’)
STOP
END
7.5 – 02
03 – 01.4
Page 25 of 31
Effective Date
1999
Revision
00
7.5 – 02
03 – 01.4
Page 26 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
C
C
C
C
C
C
C
Effective Date
1999
********************************************************************
ITTC PREDICTIONS
********************************************************************
SUBROUTINE IP
COMMON /A/ FILE(2),MODELS(2),MODELP(2),LPP,LWL,TF,TA,B,S,
*
SCALE,RNCHM,DISW,NOPROP,NPB,DP,PD075,CH075,
*
TM075,C3,SBK,AT,CP,CN,DELCFC,DELWC,KSI,KPI,
*
RHOM,RHOS,TEMM,TEMP,TEMS,VS(10),RTM(10),THM(10),
*
QM(10),NM(10),ADVC(10),KT(10),KQ(10),THD(10),
*
FD(10),IC,NOJ,NOSP,PI
C
COMMON /B/ ETARM(10),ETA0(10),ETAR(10),ETAD(10),AWTM(10),
*
AWTS(10),ACFM(10),ACTM(10),AVS(10),AVM(10),
*
ATS(10),AQS(10),APDS(10),APE(10),APDT(10),
*
ANS(10),ANT(10),BPDT(10),BNT(10),KTSJ2(10),
*
KQS(10),KTS(10),ACTS(10)
C
REAL LPP,LWL,KS1,KS,KPI,KP,NM1,NM,KT,KQ,KTM,KQD,JTM,
*
KTSJ2,JTS,NS,KQTS,KTJT2,KQOS,KQS,KTS
DO 3 I=1,NOSP
VS1=AVS(I)
CTS=ACTS(I)
WTS=AWTS(I)
C
C
C
C
CALCULATE THE FULL SCALE LOAD ADVANCE COEFF: AND
TORQUE COEFF.
FNOP=NOPROP
KTJT2=S*CTS*0.5/((DP*(1.0-WTS))**2*(1.0-THD(I))) /FNOP
JTS=APOL(1,KTSJ2,ADVC,NOJ,KT,KTJT2,IX)
KQOS=APOL(0,ADVC,KQS,NOJ,JTS,IX)
C
C
C
THE RATE OF REV. AND THE DELIVERED POWER
NS=(1.0-WTS)*VS1/(JTS*DP)
APDS(I)=2.0*PI*RHOS*DP**5*NS**3*KQOS/ETARM(I)*0.001
ANS(I)=NS
Revision
00
7.5 – 02
03 – 01.4
Page 27 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
C
C
C
Effective Date
1999
THE THRUST AND TORQUE OF THE PROPELLER
ATS(I)=KTJT2*JTS**2*RHOS*DP**4*NS*NS*0.001
AQS(I)=KQOS*RHOS*DP**5*NS*NS/ETARM(I)*0.001
C
C
C
THE EFFECTIVE POWER, TOTAL AND HULL EFFICIENCY
APE(I)=CTS*0.5*RHOS*VS1**3*S*0.001
ETAD(I)=APE(I)/APDS(I)
ETAH(I)=(1.0-THD(I))/(1.0-WTS)
IF(IC.EQ.1) GOTO 1
C
IC1=IC-1
IF(IC1)10,11,12
C
C
C
TRIAL PREDICTION WITH CP-CN CORRECTIONS (ITTC1978 ORIGINAL)
10 ANT(I)=CN*NS
BNT(I)=ANT(I)*60.0
APDT(I)=CP*APDS(I)
BPDT(I)=1.36*APDT(I)
GOTO 100
C
C
C
C
TRIAL PREDICTION WITH CP-CN CORRECTIONS
CN BASED ON POWER IDENTITY
12
11
APDT(I)=CP*APDS(I)
BPDT(I)=1.36*APDT(I)
KQJ3T=1000.0*APDT(I)/(2.0*PI*RHOS*DP**2) /FNOP
KQJ3T=KQJ3T/(VS1**3*(1.0-WTS)**3)
KQ0J3=KQJ3T*ETARM(I)
JTS=APOL(1,KQSJ3,ADVC,NOJ,KQ0J3,IX)
NS=(1.0-WTS)*VS1/(JTS*DP)
ANT(I)=CN*NS
BNT(I)=ANT(I)*60.0
GOTO 100
CONTINUE
Revision
00
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
C
C
C
*
C
C
C
7.5 – 02
03 – 01.4
Page 28 of 31
Effective Date
1999
Revision
00
TRIAL PREDICTION WITH DELCF-DELWC CORRECTIONS
KTJT2=S*(CTS+DELCFC)/(2.0*(1.0-THD(I))*(DP*
(1.0-(WTS-DELWC)))**2)
JTS=APOL(1,KTSJ2,ADVC,NOJ,KTJT2,IX)
KQOS=APOL(0,ADVC,KQS,NOJ,JTS,IX)
ANT(I)=(1.0-WTS+DELWC)*VS1/(JTS*DP)
BNT(I)=ANT(I)*60.0
APDT(I)=2.0*PI*RHOS*DP**5*ANT(I)**3*KQOS/ETARM(I)*0.001
BPDT(I)=1.36*APDT(I)
2 CONTINUE
ETAD(I)=KTJT2*JTS**3/(2.0*PI*KQOS)
3 CONTINUE
WRITE OUTPUT
CALL OUTPUT(2)
CALL OUTPUT(3)
RETURN
SUBROUTINE ANLSYS
C
C***********************************************************************************************************
****
C
*
C
*
ANALYSIS ACCORD1NG TO 1978 ITTC PREDICTION METHOD
C
*
C***********************************************************************************************************
****
C
C
DIMENSION VST(10),XNT(10),XPD(10),
*
THDT(10),WTMT(10),WTST(10),ETART(10),CRWT(10),
*
YNT(10),YPD(10),CPT(10),CNT(10),CNPT(10),ZNT(10)
*
DCFT(10),WTSS(10),DWT(10),DCFM(10),DWM(I0),
*
KQJ3(10)
C
COMMON /A/ FILE(2),MODELS(2),MODELP(2),LPP,LWL,TF,TA,B,S,
*
SCALE,RNCHM,DISW,NOPROP,NPB,DP,PD075,CH075,
*
TM075,C3,SBK,AT,CP,CN,DELCFC,DELWC,KS1,KP1,
*
RHOM, RHOS,TEMM,TEMP,TEMS,VS(10),RTM(10),THM(10),
*
QM(10),NM(10),ADVC(10),KT(10),KQ(10),THD(10),
*
RA(10),IC,NOJ,NOSP,PI
*
*
*
7.5 – 02
03 – 01.4
Page 29 of 31
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
Effective Date
1999
C
COMMON /B/
*
*
*
*
ETARM(10), ETA0(10),ETAH(10),ETAD(10),AWTM(10),
AWTS(10),ACFM(10),ACTM(10),AVS(10),AVM(10),
ATS(10),AQS(10),APDS(10),APE(10),APDT(10),
ANS(10),ANT(10),BPDT(10),BNT(10),KTSJ2(10),
KQS(10),KTS(10),ACTS(10)
C
REAL LPP,LWL,KS1,KS,KP1,KP,NM1,NM,KT,KQ,KTM,KQ0,JTM,
*
KTSJ2,JTS,NS,KQTS,KTJT2,KQOS,KTS,KQS,KQM,
*
KQJ3,KQJ3T
C
C
5
DO 5 I = 1,NOJ
KQJ3(I) = KQS(I) /ADVC(I)**3
C
NOST=10
READ(5,510) (VST(I), I=1,NOST)
READ(5,510) (XNT(I), I=1,NOST)
READ(5,510) (XPD(I), .I=1,NOST)
510
C
C
8
10
20
FORMAT (10F8.0)
COUNT NO. OF TRIAL RUNS
NOST = 0
DO 8 I = 1, 10
IF (VST(I).GT.0. ) NOST=NOST+1
CONTINUE
IF(XNT(1).GT.20.) GOTO 20
DO 10 I=1, NOST
XNT(I) = XNT(I)*60.0
XPD(I) = XPD(I)*1.36
CONTINUE
DO 50 I=1, NOST
VST1=VST(I)*1852.0/3600.0
CTST =
APOL(0,AVS, ACTS, NOSP,VST1, IX)
THDT(I)= APOL(0,AVS, THD, NOSP,VST1, IX)
WTMT(I)= APOL(0,AVS, AWTM, NOSP,VST1, IX)
WTST(I)= APOL(0,AVS, AWTS, NOSP,VST1, IX)
ETART(I)= APOL(0,AVS, ETARM,NOSP,VST1, IX)
CF
=APOL(0,AVS, ACFM, NOSP,VST1, IX)
CT
=APOL(0,AVS, ACTM, NOSP,VST1, X)
Revision
00
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
7.5 – 02
03 – 01.4
Page 30 of 31
Effective Date
1999
CRWT(I)= CT - (1.0+C3)*CF
FNOP =NOPROP
KTJT2 =S*(CTST/FNOP )*0.5 / ((DP*(1.0-WTST(I)))**2*(1.0-THDT(I)))
JTS =APOL(1, KTSJ2, ADVC, NOJ, KTJT2, IX)
KQOS=APOL (0, ADVC, KQS, NOJ, JTS, IX)
NS=(1.0-WTST(I))*VST1/(JTS*DP)
PDS = 2.0*PI*RHOS*DP**5*NS**3*KQ0S/ETART(I)*0.001*FNOP
YNT(I)= NS*60.0
YPD(I) = PDS*1.36
CPT(I)= XPD(I)/YPD(I)
CNT(l)=XNT(I)/YNT(I)
PDT1 = XPD(I) /1.36
XNT1 = XNT(I) / 60.0
FKQ = PDT1*START(I)*1000.0 / (2.0*PI*RHOS*DP**5*XNT1**3) / FNOP
FJT = APOL(0,KQS,ADVC,NOJ,FKQ,IX)
FKT = APOL(0,ADVC, KTS,NOJ,FJT,IX)
KQJ3T=FKQ * (DP*XNT1)**3 / ((1-WTST(I))*VST1)**3
FJQ= APOL( 1,KQJ3,ADVC,NOJ,KQJ3T,IX)
ZNT(I)=(1.0 -WTST(I)) * VST1 / (FJQ*DP) * 60.0
CNPT(I)=XNT(I) / ZNT(I)
THS= FKT * RHOS * DP**4*XNT1**2
CTS=THS*(1.0 - THDT(I)) / (0.5*RHOS*VST1**2*S) * FNOP
DCFT(I)=(CTS - CTST)*1000.0
WTSS(I)= 1.0 - FJT*DP*XNT1/VST1
DWT(I) = WTST(I) - WTSS(I)
DWM(I) = WTMT(I) - WTSS(I)
C
C
C
CALCULATION OF FRICTIONAL RESISTANCE ~COEFF. OF SHIP
T = TEMS
FNU = ((0.659E-3*(T-l.0)-0.05076)*(T-1)+1.7688)*1.0E-6
RNLS= ALOG10(LWL*VST1/FNU)
CFS = 0.075 / (RNLS-2.0)**2
C
DCFM(I) = CTS - (l.0+C3)*CFS - ( CRWT(I)+0.001*AT / S )*S / (S+SBK)
DCFM(I) = DCFM(I) * 1000.0
CRWT(I) = CRWT(I) * 1000.0
50 CONTINUE
C
CALL OUTPUT(4)
WRITE(6,600)
Revision
00
ITTC – Recommended
Procedures
Performance, Propulsion
1978 ITTC Performance Prediction
Method
600
610
620
630
640
650
660
670
680
690
700
710
715
717
720
730
740
750
760
770
7.5 – 02
03 – 01.4
Page 31 of 31
Effective Date
1999
Revision
00
FORMAT(' ',19X,'TRIAL ANALYSIS ACCORDING TO ITTC 1978 METHOD',///)
WRITE(6,610) ( VST(I), I=1, NOST)
FORMAT(5X..
' SHIP SPEED - TRTAL',7(F10.2, 2X) /)
WRITE(6,620) ( XNT(I), I=1, NOST)
FORMAT(5X,
‘ PROP, RPM –TRTAL ',7(F10.2, 2X) /)
WRITE(6,630) ( XPD(I), I=1, NOST)
FORMAT(4X,
'DELIV.POWER-TRIAL ',7(F11.0,1X) //)
WRITE(6,640) ( YNT(I), I=1, NOST)
FORMAT(/5X,
‘ PROP. RPM -CN=1
',7(F10.2,2X) /)
WRITE~(6,650) ( ~YPD(I), I=1,NOST)
FORMAT(4X,
' DELIV. POWER -CP =1',7(F11.0,1X) /)
WRITE(6,660) ( ZNT(I), I=1, NOST)
FORMAT(5X,
‘ PROP. RPM -CNP=1 ',7(F10.2,2X), //)
WRITE(6,670) ( CPT(I), I=1, NOST)
FORMAT(/5X,
‘ CP
‘,7(F10.3,2X) /)
WRITE(6,680) (CNT(I), I=1, NOST)
FORMAT(5X,
‘CN
‘,7(F10.3,2X) /)
WRITE(6,690) (CNPT(I), I=1,NOST)
FORMAT(5X,
‘CNP
',7(F10.3,2X) //)
WRITE(6,700) (DCFT(I), I=1,NOST)
FORMAT(/5X,
‘DCFC*1000 -CP=CN=1’,7(F10.3,2x) /)
WRITE(6,710) ( DWT(I), I=1, NOST)
FORMAT(5X,
' DWC
CP=CN=1’,7(F10.3,2X) //)
WRITE(6,715) ( DCFM(I), I=1, NOST)
FORMAT(/5X,
'DCF *1000
ITTC-57’,7(F10.3,2x) /)
WRITE(6,717) ( DWM(I), I=1,NOST)
FORMAT(5X,
‘DW = WM-WTRIAL
',7(F10.3,2X) //)
WRITE(6,720) ( CRWT(I) ,I=1, NOST)
FORMAT(/5X,
‘
CR*1000
‘,7(F10.3,2X) /)
WRITE (6,730) ( THDT(I), I=1, NOST)
FORMAT(5X,
‘
THDM
',7(F10.3,2X) /)
WRITE(6,740) ( WTMT(I), I=1, NOST)
FORMAT(5X,
’
WTM
',7(F10.3,2X) /)
WRITE(6,750) ( WTST(I), I=1, NOST)
FORMAT(5X,
‘
WTS
CP=CN=1 ’,7(F10.3,2x) /)
WRITE(6,760) ( WTSS(I), I=1, NOST)
FORMAT(5X,
’
WTS
TRIAL
’,7(F10.3,2X) /)
WRITE(6,770) ( ETART(I), I=1, NOST)
FORMAT(5X,
‘
ETARM
‘ ,7(F10.3,2X) /)
RETURN
END
120
APÊNDICE A. PREVISÃO BASEADA NOS ENSAIOS DE PROPULSÃO
Apêndice
B
Procedimentos Recomendados pela
ITTC para a Preparação e
Realização das Provas de Velocidade
e Potência
121
122
APÊNDICE B. PROVAS DE VELOCIDADE E POTÊNCIA
ITTC – Recommended
Procedures and Guidelines
Full Scale Measurements
Speed and Power Trials
Preparation and Conduct of
Speed/Power Trials
7.5-04
-01-01.1
Page 1 of 10
Effective Date
2005
Revision
03
Table of Contents
1.
PURPOSE ..............................................2
2.
DEFINITIONS.......................................2
3.
RESPONSIBILITIES............................3
4.3 Hull- and Propulsor Survey..............5
4.4 Instrumentation Installation and
Calibration .........................................5
4.4.1 Instrumentation Installation.............5
4.4.2 Instrumentation Calibration Check .6
3.1 Shipbuilders Responsibilities............3
3.2 The Trial Team ..................................4
4.
4.5 Trial Conditions.................................6
4.5.1 Wind: ...............................................8
4.5.2 Sea State: .........................................8
4.5.3 Current:............................................8
PROCEDURES......................................4
4.1 Trial Preparation...............................4
4.1.1 Shipbuilder’s Support Requirement:4
4.1.2 Space Requirements ........................4
4.2 Ship Inspection...................................5
4.2.1 Preparation for the trials ..................5
4.2.2 Ship Inspection ................................5
4.2.3 Reporting of Results and
Distribution of Information .............5
Updated / Edited by
4.6 Trial Conduct: ...................................8
5.
REFERENCES ....................................10
Approved
Specialist Committee on Powering Performance of 24th ITTC
Date 2005
24th ITTC 2005
Date 2005
7.5-04
-01-01.1
Page 2 of 10
ITTC – Recommended
Procedures and Guidelines
Full Scale Measurements
Speed and Power Trials
Preparation and Conduct of
Speed/Power Trials
Effective Date
2005
Revision
03
Preparation and Conduct of Speed/Power Trials
1.
recommended to allow an evaluation of
the trial results for scientific purposes),
PURPOSE
• to install and calibrate trial instrumentation for full scale Speed/Power trials,
The general purpose of this procedure is to
define basic requirements for the preparation
and conduct of speed trials.
The primary purpose of speed trials is to
determine ship performance in terms of speed,
power and propeller revolutions under prescribed ship conditions, and thereby verify the
satisfactory attainment of the contractually
stipulated ship speed.
The applicability of this procedure is limited to commercial ships of the displacement
type.
• to define acceptable limits for trial conditions needed to validate hydrodynamic design and/or satisfy contractual
requirements,
for acceptable conduct of each speed trial.
2.
•
The procedure is
• no waves (or waves with maximum
wave heights and wave periods according to Beaufort 1)
• to define the responsibility sharing
among the parties who take part in the
sea trial for the smooth preparation and
execution of the speed trial
• to establish a baseline of
and propulsor condition
conduct of a full-scale
trial;(hull and propulsor
the ship hull
prior to the
Speed/Power
surveys are
Ship Speed is that realized under the contractually stipulated conditions. Ideal conditions to which the speed would be corrected
would be
• no wind (or maximum wind speed according to Beaufort 2)
• to provide guidelines to document the
trial preparation prior to the conduct of
a full scale Speed/Power trial,
• to establish a guideline for conducting
inspections for the purpose of installing
instrumentation prior to the conduct of
a full scale Speed/Power trial,
DEFINITIONS
• no current
• deep water
• smooth hull and propeller surfaces
•
Docking Report: Report that documents
the condition of the ship hull and propulsors (available from the most recent dry docking).
•
Trial Agenda: Document outlining the
scope of a particular Speed/Power trial.
This document contains the procedures on
ITTC – Recommended
Procedures and Guidelines
Full Scale Measurements
Speed and Power Trials
Preparation and Conduct of
Speed/Power Trials
7.5-04
-01-01.1
Page 3 of 10
Effective Date
2005
Revision
03
how to conduct the trial and table(s) portraying the runs to be conducted.
•
The Shipbuilder has to provide all permits
and certificates needed to go to sea.
•
Trial Log: For each run, the log contains
the run number, type of maneuver, approach speed by log, approach shaft speed,
times when the maneuvers start and stop,
and any comments about the run.
•
The Shipbuilder is responsible to ensure
that all qualified personnel, needed for operating the ship and all engines, systems
and equipment during the trials have been
ordered.
•
Propeller Pitch: the design pitch also for
controllable pitch propellers.
•
•
Running Pitch: the operating pitch of a
CPP
•
Brake Power: Power delivered by the output coupling of the propulsion machinery
before passing through any speed reducing
and transmission devices and with all continuously operating engine auxiliaries in
use.
The Shipbuilder is responsible to ensure
that all regulatory bodies, Classification
Society, Ship Owner, ship agents, suppliers,
subcontractors, harbor facilities, delivering
departments of provisions, fuel, water, towing, etc., needed for conducting the sea trials, have been informed and are available
and on board, if required.
•
It is the Shipbuilder’s responsibility that all
safety measures have been checked and all
fixed, portable and individual material (for
crew, trial personnel and guests) is on
board and operative.
•
It is the Shipbuilder’s responsibility that
dock trials of all systems have been executed as well as all alarms, warning and
safety systems.
•
It is the Shipbuilder’s responsibility that an
inclining test has been performed and/or at
least a preliminary stability booklet has
been approved, covering the sea trial condition, in accordance with the 1974 SOLAS
Convention.
•
The Shipbuilder is responsible for the overall trial coordination between the ship's
crew, trial personnel, and the owner representative. A pre-trial meeting between the
trial team, owner and the ship’s crew will
be held to discuss the various trial events
and to resolve any outstanding issues.
•
Shaft Power: Net power supplied by the
propulsion machinery to the propulsion
shafting after passing through all speedreducing and other transmission devices
and after power for all attached auxiliaries
has been taken off.
3.
RESPONSIBILITIES
3.1
Shipbuilders Responsibilities
•
•
The Shipbuilder has the responsibility for
planning, conducting and evaluating the trials.
Speed – Power - Trials may be conducted
by institutions acknowledged as competent
to perform those trials, as agreed between
the Shipbuilder and the Ship owner
7.5-04
-01-01.1
Page 4 of 10
ITTC – Recommended
Procedures and Guidelines
Full Scale Measurements
Speed and Power Trials
Preparation and Conduct of
Speed/Power Trials
•
•
3.2
The Shipbuilder has, if necessary, to arrange for divers to inspect the ship’s hull
and propellers.
4.
PROCEDURES
4.1
Trial Preparation
The Trial Leader is the duly authorized
(shipbuilder’s representative) person responsible for the execution of all phases of
the Speed/Power trials including the pretrial preparation.
4.1.1
The Trial Team
The trial team is responsible for correct
measurements and analysis of the measured
data according to the state of the art.
The trial team is responsible for the following:
a.
Conduct ship inspection, if possible or
necessary.
b.
Provide, install and operate all required
trial instrumentation and temporary cabling.
c.
If previously arranged, provide the ship
master and owner’s representative with
a preliminary data package before debarking. The contents of the data package will be determined in consultation
with the owner’s representative at the
initial pre-trial briefing.
d.
Effective Date
2005
Provide a final report after completion
of the trials in accordance with any
agreement between the shipbuilder and
the ship owner.
Revision
03
Shipbuilder’s Support Requirement:
Prior to the trials the required instrumentation has to be installed. The assistance of the
ship’s or shipbuilder’s crew will be required
when making electrical connections to the
ship's systems and circuits such as heading,
wind speed, wind direction, and rudder angle
synchronous repeaters. The following support
is requested from the Shipbuilder to properly
prepare for the trials:
a.
Provide access to the ship for trial instrumentation.
b.
Assistance is required for the following
electrical connections:
• Gyrocompass
• Wind meter
• Rudder angle indicator
• Log Speed
• Propeller Pitch
c.
Vary the output level of each of the
above measurement sources to ensure
the proper operation and alignment of
the test instrumentation
4.1.2
Space Requirements
Spaces and an electric supply adequate for
the trial equipment will be required for the trial
instrumentation and computers.
ITTC – Recommended
Procedures and Guidelines
Full Scale Measurements
Speed and Power Trials
Preparation and Conduct of
Speed/Power Trials
4.2
There are three stages of a ship inspection:
in-house preparation, the actual inspection, and
the reporting of results and distribution of information to the various parties involved in the
trial.
Preparation for the trials
•
Review shafting dimensions, propulsion
plant specifications, etc.
•
Review trials agenda, if available.
4.2.2
Ship Inspection
•
Inspect hull- and propeller surface condition, if possible.
•
Inspect ship’s instrumentation for accessibility.
•
Determine routes for cable runs/data
transfer conduits between trial room
and bridge or control area.
•
Contact the Engineer on duty to discuss
trial instrumentation requirements. Inspect machinery spaces as applicable.
4.2.3
Reporting of Results and Distribution
of Information
Document all pertinent information related
to the ship inspection
a) Last date of cleaning.
b) Means of cleaning.
c) Propeller roughness measurement, if
available, which should include average, standard deviation, distribution
Effective Date
2005
Revision
03
along the blades, and existing physical
damage.
Ship Inspection
4.2.1
7.5-04
-01-01.1
Page 5 of 10
d) For a clean hull; documentation indicating manufacturer and kind of paint
used, paint layer thickness and, if available, roughness measurements (average,
standard deviation, and distribution
along the hull) should be provided. The
majority of this information may be
contained in the docking report.
e) For a dirty hull, documentation indicating visual observations of any fouling and date of last dry-docking should
be provided.
4.3
Hull- and Propulsor Survey
A roughness survey is recommended to
document the conditions of the ship hull, appendages, and propulsor(s) prior to the start of
the full-scale speed/ power trial. Cleaning may
be required if fouling is found to be such that it
would bias the trial data.
Ideally, roughness surveys should be conducted prior to the trials. The average hull
roughness should not exceed 250 µm (µ =
1x10-6 m) (6.35 mils) and the average propulsor roughness level should not be greater than
150 µm (3.81 mils).
4.4
4.4.1
Instrumentation Installation and Calibration
Instrumentation Installation
The installation of instrumentation should
be scheduled at a time of minimal conflict with
ship operations.
7.5-04
-01-01.1
Page 6 of 10
ITTC – Recommended
Procedures and Guidelines
Full Scale Measurements
Speed and Power Trials
Preparation and Conduct of
Speed/Power Trials
Effective Date
2005
Revision
03
The bias limits of the instrumentation used
for the measurements should be known and assessed.
measurement of the rates of revolutions must
be checked before the trial runs start and after
they have been finished.
The instrumentation used for the on-boardmeasurements must be calibrated before application on board. If this is not possible, for some
reason, the consequences of this should be
highlighted in the final trial report. Electrical
calibration is recommended for the torque
measurement device and, in case of use during
the sea trials, for the thrust measurement device.
Further a calibration should be done for the
pick ups and the respective amplifiers used for
the measurement of the rate of revolutions. A
“calibration” of a (differential) GPS-System is
not possible without excessive measures, but at
least the function of the device should be
checked before use on board.
As part of the pre-trial calibration, the torsion meters zero torque readings must be determined since there is a residual torque in the
shaft, which is resting on the line shaft bearings.
This might be done in different ways; one possible way is to use the jacking motors. The
shaft is jacked both ahead and astern and the
average of the readings noted. The zeroes are
set at the midpoint of the torque required to
jack each shaft ahead and the torque required to
jack each shaft astern. An allowance is normally made for frictional losses in the stern
tube bearings.
If portable radar tracking or (differential)
GPS is utilized, a Receiver/Transmitter (R/T)
unit or GPS antenna is to be installed. In case
the soft ware program used for the evaluation
of the data received does not allow for varying
positions on the uppermost deck of the ship the
antenna should be placed in a location along
the ship’s centerline as close to the ship’s CG
as possible. This location will ideally be located on a mast or site that is clear of obstructions, such as the ship’s superstructure.
4.4.2
Instrumentation Calibration Check
All shipboard signals to be recorded during
the trials must be adjusted to zero or should
have their zero value checked (e.g. for a (D)
GPS-device) after the instrumentation installation is completed and prior to the trials. The
zero values of the torsiometers, the thrust
measurement devices and the devices for the
As part of the pre-trial calibration for a ship
equipped with controllable pitch propellers,
maximum ahead pitch, the design pitch and the
maximum astern pitch should be determined
and then the ship indicators should be adjusted
to reflect the measurement.
4.5
Trial Conditions
Speed/Power trials require accurate position
data. The use of (D) GPS provides great latitude in choosing a trial site. Regardless of the
instrumentation utilized for obtaining positional data, the operational area should be free
from substantial small boat traffic.
The tracking range should be agreed between the Trial Director and the ship’s master.
Draft, trim and displacement of the ship on
trials should be obtained by averaging the ship
draft mark readings. The ship should be
brought into a condition that is as close as possible to the contract condition and/or the condi-
ITTC – Recommended
Procedures and Guidelines
Full Scale Measurements
Speed and Power Trials
Preparation and Conduct of
Speed/Power Trials
tion on which model tests have been carried out.
This will allow for the correction of the displacement and trim with respect to the trials
that were conducted and will be applicable to
the suggestions outlined in the ITTC Procedure
for the Analysis of Speed/Power Trial Data.
Draft, trim and displacement should be obtained at the beginning and at the end of the
trial. This may be accomplished using a loading computer or by taking a second draft reading. The accuracy of the draft readings and the
method used to establish draft and displacement underway will be compared in port by direct draft readings both port and starboard in
conjunction with a liquid load calculation.
Displacement should be derived from the
hydrostatic curves by utilizing the draft data
and the density of the water.
•
High wind and sea states can force the
use of excessive rudder to maintain
heading, and thus cause excessive fluctuations in shaft torque, shaft speed and
ship speed.
Sea states of 3 or less and a true wind
speed below Beaufort 6 (20 Kn) are the
desired conditions for sea trials. When
working under the time constraints of a
contract, corrections to the trials data
can be made in accordance with the recommendations provided in the ITTC
Procedure for the Analysis of
Speed/Power Trial Data for sea states
less than or equal to 5. For sea states
Effective Date
2005
Revision
03
greater than 5, corrections to the trials
data can be applied but are not considered reliable from a scientific standpoint.
•
The local seawater temperature and specific gravity at the trial site are recorded
to enable the calculation of ship's displacement.
•
An acceptable minimum water depth
for the trials where the data do not need
to be corrected for shallow water can be
calculated using:
(1)
h > 6.0(Am)0.5 and h > 0.5 V2
with
Am= midship section area, [m2]
V= ship speed, [m/s]
The larger of the 2 values obtained
from the two equations should be used.
•
Current speed and direction should be
determined in the test area by prognostic analysis. When current speed and direction is unknown, the ship’s global
drift (also including wind effect) in
some cases might be determined by a
360° turning test conducted at low
ahead speed to magnify any environmental effect.
•
The runs should be conducted into and
against the waves; i.e., head and following seas, respectively. To ensure that
tests are performed in comparable conditions, the data between reciprocal
runs should be reviewed for consistency
and/or anomalies. Individual speed runs
conducted in the same conditions
should be averaged with their reciprocal
runs to take into account global drift.
Environmental factors may significantly influence the data obtained during sea trials; consequently, these factors should be monitored
and documented to the greatest extent possible:
•
7.5-04
-01-01.1
Page 7 of 10
7.5-04
-01-01.1
Page 8 of 10
ITTC – Recommended
Procedures and Guidelines
Full Scale Measurements
Speed and Power Trials
Preparation and Conduct of
Speed/Power Trials
In accordance with ISO 15016 the following, general recommendations can be given:
4.5.1
Wind:
Wind speed and direction shall be measured
as relative wind; continuous recording of relative wind during each run is recommended.
Care has to be taken whether the data derived
from the wind indicator are reliable; checks,
such as parallel measurements with a portable
instrument, comparison of the data received
from the wind indicator with wind speeds and
directions received from local weather stations
sufficiently close to the actual position of the
ship or, if possible, calibration of the wind indicator (taking into consideration the effects of
boundary layers of the superstructure on the
measured values) in a wind tunnel are recommended.
It is suggested that wind force during the
trial runs under no conditions should be higher
than
•
Beaufort 6 for ships with lengths equal
or exceeding 100m and
•
Beaufort 5 for ships shorter than 100m.
4.5.2
Sea State:
If possible, instruments such as buoys or instruments onboard ships (e.g. seaway analysis
radar) should be used to determine the wave
height, wave period and direction of seas and
swell. Considering usual practice the wave
heights may be determined from observations
by multiple, experienced observers, including
the nautical staff on board.
Effective Date
2005
Revision
03
During the trial runs the total wave height
(double amplitude), which allows for the wave
heights of seas and swell (see ISO 15016),
should not exceed
•
3m for ships of 100m length and more
and
•
1,5m for ships with lengths smaller than
100m
4.5.3
Current:
Current speed and direction shall be obtained either as part of the evaluation of run
and counter-run of each double run, by direct
measurement with a current gauge buoy or by
use of nautical charts of the respective trial area.
It is recommended to compare measured data
with those included on the nautical charts.
4.6
Trial Conduct:
All speed trials shall be carried out using
double runs, i.e. each run is followed by a return run in the opposite direction, performed
with the same engine settings.
The number of such double runs should not
be less than three. This three runs should be at
different engine settings.
The time necessary for a speed run depends
on the ship’s speed, size and power. Steady
state conditions should be achieved before the
speed runs start. It is recommended that the
time of one run should be as long as possible
but should at least be 10 min.
The ideal path of a ship in a typical
speed/power maneuver is shown in Figure 1:
7.5-04
-01-01.1
Page 9 of 10
ITTC – Recommended
Procedures and Guidelines
Full Scale Measurements
Speed and Power Trials
Preparation and Conduct of
Speed/Power Trials
Effective Date
2005
Revision
03
Min. 10 min
Steady Approach
Steady Approach
Min 10 min
Figure 1
Prior to the trial, the data specified below
shall be recorded, based on measurements
where relevant:
• Date
• Trial area
• Weather conditions
• Air temperature
• Mean water depth in the trial area
• Water temperature and density
• Draughts
• Corresponding displacement
• Propeller pitch in the case of a CPP
It is recommended to retain a record of the
following factors, which should prove useful
for verifying the condition of the ship at the
time of the speed trial:
•
Time elapsed since last hull and propeller cleaning
•
Surface condition of hull and propeller.
The following data should be monitored
and recorded on each run:
Clock time at commencement
• Time elapsed over the measured distance
• Ship heading
• Ship’s speed over ground
• Propeller rate of revolutions
• Propeller shaft torque and/or brake
power
• Water depth
• Relative wind velocity and direction
• Air temperature
• Observed wave height (or: wave height
corresponding to observed and/or
agreed wind conditions)
• Rudder angle
• Ship position and track
7.5-04
-01-01.1
Page 10 of 10
ITTC – Recommended
Procedures and Guidelines
Full Scale Measurements
Speed and Power Trials
Preparation and Conduct of
Speed/Power Trials
Data such as ship’s speed, rate of revolutions of the propeller, torque, rudder angle and
drift angle to be used for the analyses shall be
the average values derived on the measured
distance.
5.
Effective Date
2005
Revision
03
REFERENCES
(1) ISO 15016, Ships and marine technology –
Guidelines for the assessment of speed and
power performance by analysis of speed
trial data
(2) ITTC Procedure for the Analysis of
Speed/Power Trial Data
(3) ISO 19019
Apêndice
C
Condições de Realização das Provas
de Velocidade e Potência
Recomendadas pela ITTC
133
134
APÊNDICE C. CONDIÇÕES DAS PROVAS DE VELOCIDADE E POTÊNCIA
ITTC –Recommended
Procedures
Full Scale Measurements
Speed and Power Trials
Trial Conditions
7.5 – 0.4
01 – 01.5
Page 1 of 6
Effective Date
2002
CONTENTS
1.
PURPOSE
2.
SCOPE
3.
RESPONSIBILITIES
4.
DEFINITIONS
5.
PROCEDURE
6.
REFERENCES
7.
RECORDS
8.
ATTACHMENTS
Updated by
Approved
Specialist Committee of 23rd ITTC on
Speed and Powering
Date
23rd ITTC 2002
Date 2002
Revision
01
ITTC –Recommended
Procedures
Full Scale Measurements
Speed and Power Trials
Trial Conditions
7.5 – 0.4
01 – 01.5
Page 2 of 6
Effective Date
2002
Revision
01
Trial Conditions
1. PURPOSE
b. Collect and record seawater temperature and specific gravity during trial,
daily.
The purpose of this procedure is to establish guidelines for the definition of acceptable
limits for trial conditions needed to validate
hydrodynamic design and/or satisfy contractual
requirements.
4. DEFINITIONS
2. SCOPE
5. PROCEDURE
This procedure applies to the documentation of trial conditions (environmental and
ship) in which the full-scale Speed/Power trial
are performed.
1. Speed/Power trials require accurate position data and therefore will ideally be conducted at an instrumented tracking range
located in a sheltered body of water. Lacking availability of an instrumented tracking
range, the use of DGPS provides great latitude in choosing a trial site. Regardless of
the instrumentation utilized for obtaining
positional data, the operational area should
be free from substantial small boat traffic.
2. If an instrumented tracking range is utilized, the ship’s master will receive a formal
briefing on tracking range procedures by
the Trial Director prior to the conduct of
the trials. During the briefing, specific trial
runs will be reviewed. The trial team will
provide an on-shore observer to monitor
data collection by the tracking range facility. If DGPS is utilized, the Trial Director
will brief the ship’s master on specific trial
runs and procedures.
3. Ship characteristics and environmental factors are carefully monitored and documented throughout the trials (see Table 1).
Accurate quantification of these conditions
is necessary because a ship's speed and
powering characteristics are extremely sensitive to conditions such as ship and propeller condition, ship displacement, shallow
water effects, sea state and wind velocity.
3. RESPONSIBILITIES
•
•
•
The Trial Director is the duly authorized
shipbuilder’s representative responsible for
the execution of all phases of the
Speed/Power trials. When unforeseen problems, such as weather or technical difficulties require that the trial schedule or trial
logistics be modified, the Trial Director
shall make the final decision, subject to the
concurrence of the ship’s master and the
owner’s representative.
The shipbuilder is responsible for the overall trial coordination between the ship's
crew, trial personnel, and the owner representative. A pre-trial meeting between the
trial team, owner and the ship’s crew will
be held to discuss the various trial events
and to resolve any outstanding issues.
The trial team is responsible for the following:
a. Operate and maintain all required trial
instrumentation and temporary cabling.
None
ITTC –Recommended
Procedures
Full Scale Measurements
Speed and Power Trials
Trial Conditions
4. Speed/Power Trials are normally scheduled
within 30 days of undocking to minimize
the adverse effects of hull and propulsor
fouling and provide a more "standard" condition for testing. In situations where the
ship has become fouled after undocking, a
hull cleaning, propeller polishing and hull
and propeller roughness survey should be
performed within 30 days of the
Speed/Power trial date. Guidance may be
found in Hull and Propulsor Survey Procedure 7.5-04-01-01.3. At a minimum, the
ship’s latest docking report and diver inspection should be provided to fulfill this
requirement. Guidance may be found in
Speed/Power Trial Ship Inspection Procedure 7.5-04-01-01.2.
5. Draft, trim and displacement of the trials
must be obtained by averaging the ship
draft mark readings. The ship should be
brought into a condition that is as close as
possible to the contract condition and/or the
condition by which model tests have been
carried out. This will allow for the correction of the displacement and trim with respect to the trials that were conducted and
will be applicable to the suggestions outlined in the 23rd ITTC Speed and Powering
Trials Specialist Committee final report.
a. Draft, trim and displacement must be
obtained at the beginning and at the end
of the trial. This may be accomplished
using a loading computer or by taking a
second draft reading. The accuracy of
the ship's draft marks and the method
used to calculate draft and displacement
underway will be compared in port by
direct draft readings both port and starboard in conjunction with a liquid load
calculation. The trial team will verify
and document the results prior to the
Speed/Power trials.
7.5 – 0.4
01 – 01.5
Page 3 of 6
Effective Date
2002
Revision
01
b. Displacement must be derived from the
hydrostatic curves by utilizing the draft
data and the density of the water. When
dealing with Froude numbers higher
than 0.5 (e.g. a Fast Ferry with 100 m
length and speed over 30 kn) intermediate ship loading conditions must be
documented. This is better accomplished through tank soundings.
6. Environmental factors can significantly influence the data obtained during sea trials.
Consequently, these factors must be monitored and documented to the greatest extent
possible.
a. High wind and sea states can force the
use of excessive rudder to maintain
heading, and thus cause excessive fluctuations in shaft torque, shaft speed and
ship speed.
b. Sea states of 3 or less and a true wind
speed below Beaufort 6 (20 kn) are the
desired conditions for sea trials. When
working under the time constraints of a
contract, corrections to the trials data
can be made in accordance with the recommendations provided in the 23rd
ITTC Speed and Powering Trials Specialist Committee final report for sea
states less than or equal to 5. For sea
states greater than 5, corrections to the
trials data can be applied but are not
considered reliable from a scientific
standpoint.
c. The local seawater temperature and specific gravity at the trial site are recorded
to enable the calculation of ship's displacement.
d. Air temperature and atmospheric pressure should be measured at the trial location using a calibrated thermometer
and barometer.
e. An acceptable minimum water depth for the
trials where the data do not need to be cor-
ITTC –Recommended
Procedures
Full Scale Measurements
Speed and Power Trials
Trial Conditions
rected for shallow water can be calculated
using:
h > 6.0(Am)0.5 and h > 0.5 V2
(1)
Use the larger of the 2 values obtained from
the two equations.
Other accepted formulae are:
1. SNAME 1973/21st ITTC Powering
Performance
Committee
d
≥
10TV/(L)0.5
(2)
d = water depth, ft
T =´trial draft, ft
V = speed, kn
L = length between perpendiculars, ft
2.
SNAME 1989 from Det Norske
Veritas
Nautical Safety- Additional Classes
NAUT-A, NAUT-B AND NAUTC, July 1986
h > 5.0(Am)0.5 and h > 0.4 V2 (3)
Use the larger of the 2 values obtained from the two equations.
h = water depth, m
Am = midship section area, m2
V = ship speed, m/s
or
h > 5 (T)
T =
(4)
Mean draft, m
3.
7.5 – 0.4
01 – 01.5
Page 4 of 6
Effective Date
2002
Revision
01
22nd ITTC Trials & Monitoring
Specialist Committee/12th ITTC
based on ship section and Froude
Number.
h > 3.0(BT)0.5 and h > 2.75 V2/g
(5)
Use the larger of the 2 values obtained from the two equations.
h = depth in appropriate length
units
B = beam in appropriate length
units
T = draft in appropriate length
units
V = speed in system of units consistent with the above dimension
g = acceleration due to gravity in
units consistent with the above dimension
4. ISO/FDIS 15016:(E) based on Lackenby’s Formula
∆V
gh
A
= 0.1242 2m − 0.05 + 1 − tanh( 2 )
h
V
V
for h ≤ (Am/0.05)0.5
∆V
≤ 0.02
V
(6)
h = water depth, m
Am = midship section area under
water, m2
V = ship speed, m/s
∆V = speed loss due to shallow water effect, m/s
g = acceleration due to gravity,
m/s2
0.5
7.5 – 0.4
01 – 01.5
Page 5 of 6
ITTC –Recommended
Procedures
Full Scale Measurements
Speed and Power Trials
Trial Conditions
f. Current speed and direction should be
determined in the test area by prognostic analysis. When current speed is suspected to be varying and direction is
unknown, the ship’s global drift (also
including wind effect) should be determined by a 360° turning test conducted
at low ahead speed to magnify any environmental effect. Test runs should be
conducted against and with global drift.
It should be noted that this method of
determining the direction of the trial
runs is extremely important in the case
of small ships whose performance is
strongly effected by environmental conditions. For large ships, such as ULCCs,
performance is not impacted as greatly
by environmental conditions. If time is
a critical factor, then the runs can be
conducted into and against the waves;
i.e., head and following seas, respectively. To ensure that tests are performed in comparable conditions, the
data between reciprocal runs should be
reviewed for consistency and/or anomalies. Individual speed runs conducted in
the same conditions should be averaged
with their reciprocal runs to take into
account global drift.
6. REFERENCES
1. SNAME 1973/21st ITTC Powering Performance Committee Final Report
Effective Date
2002
Revision
01
2. 22nd ITTC Trials & Monitoring Specialist
Committee Final Report
3. Ships and marine technology – Guidelines
for the assessment of speed and power performance analysis of speed trial data, Final
Draft International Standard ISO/FDIS
15016: (E), ISO/TC 8/SC 9/WG 2 of 2001
4. 23rd ITTC Speed and Powering Trials Specialist Committee Final Report
5. Speed/Power Trial Ship Inspection Procedure 7.5-04-01-01.2
6. Hull and Propulsor Survey Procedure 7.504-01-01.3
7. RECORDS
1. Ship conditions – displacement, draft, propulsor and hull roughness
2. Environmental conditions – water depth,
water temperature, wind direction and
speed, sea state, specific gravity, air temperature, atmospheric pressure, current
speed and direction
8. ATTACHMENTS
1. Table 1. Documented Ship and Trial Conditions Reported
7.5 – 0.4
01 – 01.5
Page 6 of 6
ITTC –Recommended
Procedures
Full Scale Measurements
Speed and Power Trials
Trial Conditions
Effective Date
2002
Table 1. Documented Ship and Trial Conditions Reported
Description
Ship Hull
Draft
Trim
Displacement and Load
Hull Condition
Roughness of shell and bottom paint
Height of welding beads
Waviness of hull
Size, number and position of zinc anodes
Size, number and position of openings of sea water inlets and outlets
Paint system
Hull Appendages and Rudder
Geometry, deviations, roughness
Type
Rate of movement
Propeller(s)
Geometry, deviations, roughness
Pitch
Direction of rotation
Number of blades
Propeller Shaft(s)
Geometry
Material
Trial Site
Water depth
Water temperature
Air temperature
Sea State
Specific gravity of water
Environmental Conditions
Wind
Waves
Current
Atmospheric pressure
Revision
01
Apêndice
D
Utilização dos Diagramas na
Selecção de Motores Propulsores
141
142
APÊNDICE D. SELECÇÃO DE MOTORES PROPULSORES
Basic Principles of Ship Propulsion
Page
Contents:
Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
Scope of this Paper . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
Chapter 1
Ship Definitions and Hull Resistance . . . . . . . . . . . . . . . . . .
4
• Ship types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
• A ship’s load lines . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
• Indication of a ship’s size . . . . . . . . . . . . . . . . . . . . . . . .
5
• Description of hull forms . . . . . . . . . . . . . . . . . . . . . . . .
5
• Ship’s resistance . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
Chapter 2
Propeller Propulsion . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
• Propeller types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
• Flow conditions around the propeller . . . . . . . . . . . . . . . . . . 11
• Efficiencies . . . . . . . . . . . . . . . . . . . . . . . . . . . · · · · 11
• Propeller dimensions . . . . . . . . . . . . . . . . . . . . . . · · · · 13
• Operating conditions of a propeller . . . . . . . . . . . . . . . . . . . 15
Chapter 3
Engine Layout and Load Diagrams
. . . . . . . . . . . . . . . . . . 20
• Power functions and logarithmic scales . . . . . . . . . . . . . . . . . 20
• Propulsion and engine running points . . . . . . . . . . . . . . . . . . 20
• Engine layout diagram . . . . . . . . . . . . . . . . . . . . . . . . . 22
• Load diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
• Use of layout and load diagrams – examples . . . . . . . . . . . . . . 25
• Influence on engine running of different types
of ship resistance – plant with FPpropeller . . . . . . . . . . . . . . . 27
• Influence of ship resistance
on combinator curves – plant with CPpropeller . . . . . . . . . . . . 29
Closing Remarks. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Basic Principles of Ship Propulsion
Introduction
Scope of this Paper
For the purpose of this paper, the term
“ship” is used to denote a vehicle em
ployed to transport goods and persons
from one point to another over water.
Ship propulsion normally occurs with
the help of a propeller, which is the
term most widely used in English, al
though the word “screw” is sometimes
seen, inter alia in combinations such as
a “twinscrew” propulsion plant.
This paper is divided into three chapters
which, in principle, may be considered as
three separate papers but which also,
with advantage, may be read in close
connection to each other. Therefore,
some important information mentioned in
one chapter may well appear in another
chapter, too.
Today, the primary source of propeller
power is the diesel engine, and the power
requirement and rate of revolution very
much depend on the ship’s hull form
and the propeller design. Therefore, in
order to arrive at a solution that is as
optimal as possible, some general
knowledge is essential as to the princi
pal ship and diesel engine parameters
that influence the propulsion system.
This paper will, in particular, attempt to
explain some of the most elementary
terms used regarding ship types,
ship’s dimensions and hull forms and
clarify some of the parameters pertain
ing to hull resistance, propeller condi
tions and the diesel engine’s load
diagram.
On the other hand, it is considered be
yond the scope of this publication to
give an explanation of how propulsion
calculations as such are carried out, as
the calculation procedure is extremely
complex. The reader is referred to the
specialised literature on this subject, for
example as stated in “References”.
Chapter 1, describes the most elemen
tary terms used to define ship sizes
and hull forms such as, for example,
the ship’s displacement, deadweight,
design draught, length between per
pendiculars, block coefficient, etc.
Other ship terms described include the
effective towing resistance, consisting
of frictional, residual and air resistance,
and the influence of these resistances
in service.
followed up by the relative heavy/light
running conditions which apply when
the ship is sailing and subject to different
types of extra resistance, like fouling,
heavy sea against, etc.
Chapter 3, elucidates the importance
of choosing the correct specified MCR
and optimising point of the main engine,
and thereby the engine’s load diagram
in consideration to the propeller’s design
point. The construction of the relevant
load diagram lines is described in detail
by means of several examples. Fig. 24
shows, for a ship with fixed pitch pro
peller, by means of a load diagram, the
important influence of different types of
ship resistance on the engine’s contin
uous service rating.
Chapter 2, deals with ship propulsion
and the flow conditions around the pro
peller(s). In this connection, the wake
fraction coefficient and thrust deduc
tion coefficient, etc. are mentioned.
The total power needed for the propel
ler is found based on the above effec
tive towing resistance and various
propeller and hull dependent efficien
cies which are also described. A sum
mary of the propulsion theory is shown
in Fig. 6.
The operating conditions of a propeller
according to the propeller law valid for
a propeller with fixed pitch are described
for free sailing in calm weather, and
3
Category
Ship Definitions and Hull
Resistance
Tanker
Class
Type
Oil tanker
Crude (oil) Carrier
Very Large Crude Carrier
Ultra Large Crude Carrier
Product Tanker
CC
VLCC
ULCC
Gas tanker
Chemical tanker
Liquefied Natural Gas carrier
Liquefied Petroleum Gas carrier
LNG
LPG
OBO
Oil/Bulk/Ore carrier
OBO
Container carrier
Roll OnRoll Off
RoRo
Ship types
Depending on the nature of their cargo,
and sometimes also the way the cargo
is loaded/unloaded, ships can be divided
into different categories, classes, and
types, some of which are mentioned in
Table 1.
The three largest categories of ships
are container ships, bulk carriers (for
bulk goods such as grain, coal, ores,
etc.) and tankers, which again can be
divided into more precisely defined
classes and types. Thus, tankers can
be divided into oil tankers, gas tankers
and chemical tankers, but there are
also combinations, e.g. oil/chemical
tankers.
Table 1 provides only a rough outline.
In reality there are many other combi
nations, such as “Multipurpose bulk
container carriers”, to mention just one
example.
Bulk carrier
Bulk carrier
Container ship
Container ship
General cargo ship
General cargo
Coaster
Reefer
Reefer
Passenger ship
Ferry
Cruise vessel
Refrigerated cargo vessel
Table 1: Examples of ship types
the risk of bad weather whereas, on the
other hand, the freeboard draught for
tropical seas is somewhat higher than
the summer freeboard draught.
A ship’s load lines
Painted halfway along the ship’s side
is the “Plimsoll Mark”, see Fig. 1. The
lines and letters of the Plimsoll Mark,
which conform to the freeboard rules
laid down by the IMO (International
Maritime Organisation) and local au
thorities, indicate the depth to which
the vessel may be safely loaded (the
depth varies according to the season
and the salinity of the water).
There are, e.g. load lines for sailing in
freshwater and seawater, respectively,
with further divisions for tropical condi
tions and summer and winter sailing.
According to the international freeboard
rules, the summer freeboard draught
for seawater is equal to the “Scantling
draught”, which is the term applied to
the ship’s draught when dimensioning
the hull.
The winter freeboard draught is less
than that valid for summer because of
4
D
Freeboard deck
D: Freeboard draught
TF
D
L
F
T
S
W
WNA
Tropical
Summer
Winter
Winter - the North Atlantic
Danish load mark
Freshwater
Fig. 1: Load lines – freeboard draught
Seawater
Indication of a ship’s size
Displacement and deadweight
When a ship in loaded condition floats at
an arbitrary water line, its displacement is
equal to the relevant mass of water dis
placed by the ship. Displacement is thus
equal to the total weight, all told, of the
relevant loaded ship, normally in seawa
ter with a mass density of 1.025 t/m3.
Displacement comprises the ship’s
light weight and its deadweight, where
the deadweight is equal to the ship’s
loaded capacity, including bunkers and
other supplies necessary for the ship’s
propulsion. The deadweight at any time
thus represents the difference between
the actual displacement and the ship’s
light weight, all given in tons:
AM
BWL
DF
DA
LPP
LWL
deadweight = displacement – light weight.
LOA
Incidentally, the word “ton” does not
always express the same amount of
weight. Besides the metric ton (1,000
kg), there is the English ton (1,016 kg),
which is also called the “long ton”. A
“short ton” is approx. 907 kg.
The light weight of a ship is not normally
used to indicate the size of a ship,
whereas the deadweight tonnage
(dwt), based on the ship’s loading ca
pacity, including fuel and lube oils etc.
for operation of the ship, measured in
tons at scantling draught, often is.
Sometimes, the deadweight tonnage
may also refer to the design draught of
the ship but, if so, this will be mentioned.
Table 2 indicates the ruleofthumb rela
tionship between the ship’s displacement,
deadweight tonnage (summer freeboard/
scantling draught) and light weight.
A ship’s displacement can also be ex
pressed as the volume of displaced
water ∇, i.e. in m3.
Gross register tons
Without going into detail, it should be
mentioned that there are also such
measurements as Gross Register Tons
(GRT), and Net Register Tons (NRT)
where 1 register ton = 100 English cubic
feet, or 2.83 m3.
D
Length between perpendiculars:
Length on waterline:
Length overall:
Breadth on waterline:
Draught:
Midship section area:
LPP
LWL
LOA
BWL
D = 1/2 (DF +DA)
Am
Fig. 2: Hull dimensions
Ship type
Tanker and
Bulk carrier
Container ship
dwt/light
weight ratio
Displ./dwt
ratio
6
1.17
2.53.0
1.331.4
Table 2: Examples of relationship between dis
placement, deadweight tonnage and light weight
These measurements express the size
of the internal volume of the ship in ac
cordance with the given rules for such
measurements, and are extensively
used for calculating harbour and canal
dues/charges.
Description of hull forms
It is evident that the part of the ship
which is of significance for its propulsion
is the part of the ship’s hull which is
under the water line. The dimensions
below describing the hull form refer
to the design draught, which is less
than, or equal to, the scantling
draught. The choice of the design
draught depends on the degree of
load, i.e. whether, in service, the ship
will be lightly or heavily loaded. Gen
erally, the most frequently occurring
draught between the fullyloaded and
the ballast draught is used.
Ship’s lengths LOA, LWL, and LPP
The overall length of the ship LOA is
normally of no consequence when
calculating the hull’s water resistance.
The factors used are the length of the
waterline LWL and the socalled length
between perpendiculars LPP. The di
mensions referred to are shown in
Fig. 2.
5
The length between perpendiculars is
the length between the foremost per
pendicular, i.e. usually a vertical line
through the stem’s intersection with
the waterline, and the aftmost perpen
dicular which, normally, coincides with
the rudder axis. Generally, this length is
slightly less than the waterline length,
and is often expressed as:
D
AM
Waterline plane
AWL
L PP
L WL
LPP = 0.97 × LWL
BW
L
Draught D
The ship’s draught D (often T is used in
literature) is defined as the vertical dis
tance from the waterline to that point of
the hull which is deepest in the water,
see Figs. 2 and 3. The foremost draught
DF and aftmost draught DA are normally
the same when the ship is in the loaded
condition.
Breadth on waterline BWL
Another important factor is the hull’s
largest breadth on the waterline BWL,
see Figs. 2 and 3.
Block coefficient CB
Various form coefficients are used to
express the shape of the hull. The most
important of these coefficients is the
block coefficient CB, which is defined
as the ratio between the displacement
volume ∇ and the volume of a box with
dimensions LWL × BWL × D, see Fig. 3, i.e.:
CB =
:
Waterline area
: A WL
Block coefficient, LWL based
: CB =
Midship section coefficient
: CM =
Longitudinal prismatic coefficient
: CP =
Waterplane area coefficient
LWL × BWL × D
A small block coefficient means less re
sistance and, consequently, the possibil
ity of attaining higher speeds.
Table 3 shows some examples of block
coefficient sizes, and the pertaining
: CWL =
LWL x BWL x D
AM
BWL x D
AM x LWL
AWL
LWL x BWL
Fig. 3: Hull coefficients of a ship
service speeds, on different types of
ships. It shows that large block coeffi
cients correspond to low speeds and
vice versa.
∇
In the case cited above, the block co
efficient refers to the length on water
line LWL. However, shipbuilders often use
block coefficient CB, PP based on the
length between perpendiculars, LPP, in
which case the block coefficient will, as a
rule, be slightly larger because, as previ
ously mentioned, LPP is normally slightly
less than LWL.
∇
C B ,PP =
LPP × BWL × D
6
Volume of displacement
Block
coefficient
CB
Approxi
mate ship
speed V
in knots
0.90
5 – 10
Bulk carrier
0.80 – 0.85
12 – 17
Tanker
0.80 – 0.85
12 –16
General cargo
0.55 – 0.75
13 – 22
Container ship
0.50 – 0.70
14 – 26
Ferry boat
0.50 – 0.70
15 – 26
Ship type
Lighter
Table 3: Examples of block coefficients
Water plane area coefficient CWL
The water plane area coefficient CWL
expresses the ratio between the ves
sel’s waterline area AWL and the product
of the length LWL and the breadth BWL of
the ship on the waterline, see Fig. 3, i.e.:
CWL =
AWL
LWL × BWL
Generally, the waterplane area coeffi
cient is some 0.10 higher than the block
coefficient, i.e.:
CWL ≅ CB + 0.10.
This difference will be slightly larger on
fast vessels with small block coefficients
where the stern is also partly immersed
in the water and thus becomes part of
the ”waterplane” area.
Midship section coefficient CM
A further description of the hull form is
provided by the midship section coeffi
cient CM, which expresses the ratio be
tween the immersed midship section
area AM (midway between the foremost
and the aftmost perpendiculars) and the
product of the ship’s breadth BWL and
draught D, see Fig. 3, i.e.:
CM =
AM
BWL × D
For bulkers and tankers, this coefficient
is in the order of 0.980.99, and for
container ships in the order of 0.970.98.
Longitudinal prismatic coefficient CP
The longitudinal prismatic coefficient
CP expresses the ratio between dis
placement volume ∇ and the product
of the midship frame section area AM
and the length of the waterline LWL,
see also Fig. 3, i.e.:
Cp =
∇
AM × LWL
=
∇
C M × BWL × D × LWL
CB
=
CM
As can be seen, CP is not an independ
ent form coefficient, but is entirely de
pendent on the block coefficient CB
and the midship section coefficient CM.
Longitudinal Centre of Buoyancy LCB
The Longitudinal Centre of Buoyancy
(LCB) expresses the position of the
centre of buoyancy and is defined as
the distance between the centre of
buoyancy and the midpoint between
the ship’s foremost and aftmost perpen
diculars. The distance is normally stated
as a percentage of the length between
the perpendiculars, and is positive if
the centre of buoyancy is located to
the fore of the midpoint between the
perpendiculars, and negative if located
to the aft of the midpoint. For a ship
designed for high speeds, e.g. container
ships, the LCB will, normally, be nega
tive, whereas for slowspeed ships,
such as tankers and bulk carriers, it will
normally be positive. The LCB is gener
ally between 3% and +3%.
Fineness ratio CLD
The length/displacement ratio or fine
ness ratio, CLD, is defined as the ratio
between the ship’s waterline length LWL,
and the length of a cube with a volume
equal to the displacement volume, i.e.:
C LD =
LWL
3
∇
Ship’s resistance
To move a ship, it is first necessary to
overcome resistance, i.e. the force work
ing against its propulsion. The calculation
of this resistance R plays a significant role
in the selection of the correct propeller and
in the subsequent choice of main engine.
General
A ship’s resistance is particularly influ
enced by its speed, displacement, and
hull form. The total resistance RT, con
sists of many sourceresistances R
which can be divided into three main
groups, viz.:
1) Frictional resistance
2) Residual resistance
3) Air resistance
The influence of frictional and residual
resistances depends on how much of
the hull is below the waterline, while the
influence of air resistance depends on
how much of the ship is above the wa
terline. In view of this, air resistance will
have a certain effect on container ships
which carry a large number of contain
ers on the deck.
Water with a speed of V and a density
of r has a dynamic pressure of:
½ × r × V 2 (Bernoulli’s law)
Thus, if water is being completely
stopped by a body, the water will react
on the surface of the body with the dy
namic pressure, resulting in a dynamic
force on the body.
This relationship is used as a basis
when calculating or measuring the
sourceresistances R of a ship’s hull,
by means of dimensionless resistance
coefficients C. Thus, C is related to the
reference force K, defined as the force
which the dynamic pressure of water
with the ship’s speed V exerts on a
surface which is equal to the hull’s wet
ted area AS. The rudder’s surface is
also included in the wetted area. The
general data for resistance calculations
is thus:
Reference force: K = ½ × r × V 2 × AS
and source resistances: R = C × K
On the basis of many experimental
tank tests, and with the help of pertain
ing dimensionless hull parameters,
some of which have already been dis
cussed, methods have been estab
lished for calculating all the necessary
resistance coefficients C and, thus, the
pertaining sourceresistances R. In
practice, the calculation of a particular
ship’s resistance can be verified by
testing a model of the relevant ship in
a towing tank.
Frictional resistance RF
The frictional resistance RF of the hull
depends on the size of the hull’s wet
ted area AS, and on the specific fric
tional resistance coefficient CF. The
friction increases with fouling of the
hull, i.e. by the growth of, i.a. algae,
sea grass and barnacles.
An attempt to avoid fouling is made by
the use of antifouling hull paints to
prevent the hull from becoming
“longhaired”, i.e. these paints reduce
the possibility of the hull becoming
fouled by living organisms. The paints
containing TBT (tributyl tin) as their
principal biocide, which is very toxic,
have dominated the market for decades,
but the IMO ban of TBT for new appli
cations from 1 January, 2003, and a
full ban from 1 January, 2008, may in
volve the use of new (and maybe not
as effective) alternatives, probably cop
perbased antifouling paints.
When the ship is propelled through the
water, the frictional resistance increases
at a rate that is virtually equal to the
square of the vessel’s speed.
Frictional resistance represents a con
siderable part of the ship’s resistance,
often some 7090% of the ship’s total
resistance for lowspeed ships (bulk
carriers and tankers), and sometimes
less than 40% for highspeed ships
(cruise liners and passenger ships) [1]. The
frictional resistance is found as follows:
R F = CF × K
Residual resistance RR
Residual resistance RR comprises wave
resistance and eddy resistance. Wave
resistance refers to the energy loss
caused by waves created by the vessel
during its propulsion through the water,
while eddy resistance refers to the loss
caused by flow separation which cre
ates eddies, particularly at the aft end
of the ship.
7
Wave resistance at low speeds is pro
portional to the square of the speed,
but increases much faster at higher
speeds. In principle, this means that a
speed barrier is imposed, so that a fur
ther increase of the ship’s propulsion
power will not result in a higher speed
as all the power will be converted into
wave energy. The residual resistance
normally represents 825% of the total
resistance for lowspeed ships, and up
to 4060% for highspeed ships [1].
Incidentally, shallow waters can also
have great influence on the residual
resistance, as the displaced water un
der the ship will have greater difficulty
in moving aftwards.
The procedure for calculating the spe
cific residual resistance coefficient CR is
described in specialised literature [2]
and the residual resistance is found as
follows:
through the water, i.e. to tow the ship
at the speed V, is then:
P E = V × RT
The power delivered to the propeller,
PD, in order to move the ship at speed
V is, however, somewhat larger. This is
due, in particular, to the flow conditions
around the propeller and the propeller
efficiency itself, the influences of which
are discussed in the next chapter
which deals with Propeller Propulsion.
Total ship resistance in general
When dividing the residual resistance
into wave and eddy resistance, as earlier
described, the distribution of the total ship
towing resistance RT could also, as a
guideline, be stated as shown in Fig. 4.
The right column is valid for lowspeed
ships like bulk carriers and tankers, and
the left column is valid for very highspeed
ships like cruise liners and ferries. Con
tainer ships may be placed in between
the two columns.
The main reason for the difference
between the two columns is, as earlier
mentioned, the wave resistance. Thus,
in general all the resistances are pro
portional to the square of the speed,
but for higher speeds the wave resis
tance increases much faster, involving
a higher part of the total resistance.
This tendency is also shown in Fig. 5
for a 600 teu container ship, originally
designed for the ship speed of 15 knots.
Without any change to the hull design,
Type of resistance
R R = CR × K
High Low
speed speed
ship ship
Air resistance RA
In calm weather, air resistance is, in prin
ciple, proportional to the square of the
ship’s speed, and proportional to the
crosssectional area of the ship above the
waterline. Air resistance normally repre
sents about 2% of the total resistance.
RF
RW
RE
RA
= Friction
= Wave
= Eddy
= Air
V
RA = 0.90 × ½ × rair × V 2 × Aair
Ship speed V
RW
where rair is the density of the air, and
Aair is the crosssectional area of the
vessel above the water [1].
RE
V
RF
RT = RF + R R + RA
The corresponding effective (towing)
power, PE, necessary to move the ship
Fig. 4: Total ship towing resistance RT = RF + RW + RE + RA
8
45 90
40 5
5 3
10 2
RA
For container ships in head wind, the
air resistance can be as much as 10%.
The air resistance can, similar to the
foregoing resistances, be expressed as
RA = CA × K, but is sometimes based
on 90% of the dynamic pressure of air
with a speed of V, i.e.:
Towing resistance RT
and effective (towing) power PE
The ship’s total towing resistance RT is
thus found as:
% of RT
kW Propulsion power
8,000
6,000
"Wave wall"
New service point
4,000
Normal service point
2,000
Estimates of average increase in
resistance for ships navigating the
main routes:
North Atlantic route,
navigation westward
2535%
North Atlantic route,
navigation eastward
2025%
EuropeAustralia
2025%
EuropeEast Asia
2025%
The Pacific routes
2030%
Table 4: Main routes of ships
0
10
15
20 knots
Ship speed
Power and speed relationship for a 600 TEU container ship
Fig. 5: The “wave wall” ship speed barrier
the ship speed for a sister ship was re
quested to be increased to about 17.6
knots. However, this would lead to a
relatively high wave resistance, requir
ing a doubling of the necessary propul
sion power.
A further increase of the propulsion
power may only result in a minor ship
speed increase, as most of the extra
power will be converted into wave en
ergy, i.e. a ship speed barrier valid for
the given hull design is imposed by
what we could call a “wave wall”, see
Fig. 5. A modification of the hull lines,
suiting the higher ship speed, is neces
sary.
Increase of ship resistance in service,
Ref. [3], page 244
During the operation of the ship, the
paint film on the hull will break down.
Erosion will start, and marine plants
and barnacles, etc. will grow on the
surface of the hull. Bad weather, per
haps in connection with an inappropri
ate distribution of the cargo, can be a
reason for buckled bottom plates. The
hull has been fouled and will no longer
have a “technically smooth” surface,
which means that the frictional resist
ance will be greater. It must also be
considered that the propeller surface
can become rough and fouled. The to
tal resistance, caused by fouling, may
increase by 2550% throughout the
lifetime of a ship.
Experience [4] shows that hull fouling
with barnacles and tube worms may
cause an increase in drag (ship resis
tance) of up to 40%, with a drastical
reduction of the ship speed as the con
sequence.
Furthermore, in general [4] for every 25
µm (25/1000 mm) increase of the aver
age hull roughness, the result will be a
power increase of 23%, or a ship
speed reduction of about 1%.
Resistance will also increase because
of sea, wind and current, as shown in
Table 4 for different main routes of
ships. The resistance when navigating
in headon sea could, in general, in
crease by as much as 50100% of the
total ship resistance in calm weather.
On the North Atlantic routes, the first
percentage corresponds to summer
navigation and the second percentage
to winter navigation.
However, analysis of trading conditions
for a typical 140,000 dwt bulk carrier
shows that on some routes, especially
JapanCanada when loaded, the in
creased resistance (sea margin) can
reach extreme values up to 220%, with
an average of about 100%.
Unfortunately, no data have been pub
lished on increased resistance as a fun
ction of type and size of vessel. The
larger the ship, the less the relative in
crease of resistance due to the sea.
On the other hand, the frictional resis
tance of the large, fullbodied ships will
very easily be changed in the course of
time because of fouling.
In practice, the increase of resistance
caused by heavy weather depends on
the current, the wind, as well as the
wave size, where the latter factor may
have great influence. Thus, if the wave
size is relatively high, the ship speed
will be somewhat reduced even when
sailing in fair seas.
In principle, the increased resistance
caused by heavy weather could be
related to:
a) wind and current against, and
b) heavy waves,
but in practice it will be difficult to dis
tinguish between these factors.
9
Chapter 2
Propeller Propulsion
The traditional agent employed to
move a ship is a propeller, sometimes
two and, in very rare cases, more than
two. The necessary propeller thrust T
required to move the ship at speed V
is normally greater than the pertaining
towing resistance RT, and the flowrelated
reasons are, amongst other reasons,
explained in this chapter. See also Fig. 6,
where all relevant velocity, force, power
and efficiency parameters are shown.
Velocities
Ship’s speed
: V
Arriving water velocity to propeller : VA
(Speed of advance of propeller)
Effective wake velocity
: VW = V _ V A
V _ VA
Wake fraction coefficient
: w=
V
Forces
Towing resistance
: PE = R T x V
Thrust power delivered
by the propeller to water
: PT = PE /
H
Power delivered to propeller
: PD = P T /
B
Brake power of main engine
: PB = PD /
S
Efficiencies
: RT
Thrust force
Thrust deduction fraction
Thrust deduction coefficient
Propeller types
Power
Effective (Towing) power
: T
: F = T _ RT
_
: t = T RT
T
Relative rotative efficiency
:
Propeller efficiency open water :
Propeller efficiency behind hull :
Propulsive efficiency
:
Shaft efficiency
:
Total efficiency
:
V W VA
V
Propellers may be divided into the follow
ing two main groups, see also Fig. 7:
:
Hull efficiency
T
PE PE PT PD
= = x x =
PB PT PD P B
H
x
Bx
S
=
H
=
1_t
1_w
R
0
B
D
=
=
0
x
R
H
x
B
S
T
H
x
0
x
R
x
• Fixed pitch propeller (FPpropeller)
V
• Controllable pitch propeller
(CPpropeller)
F
RT
T
Propellers of the FPtype are cast in
one block and normally made of a copper
alloy. The position of the blades, and
thereby the propeller pitch, is once and
for all fixed, with a given pitch that can
not be changed in operation. This
means that when operating in, for ex
ample, heavy weather conditions, the
propeller performance curves, i.e. the
combination of power and speed
(r/min) points, will change according to
the physical laws, and the actual pro
peller curve cannot be changed by the
crew. Most ships which do not need a
particularly good manoeuvrability are
equipped with an FPpropeller.
Propellers of the CPtype have a rela
tively larger hub compared with the
FPpropellers because the hub has to
have space for a hydraulically activated
mechanism for control of the pitch (an
gle) of the blades. The CPpropeller is
relatively expensive, maybe up to 34
times as expensive as a corresponding
FPpropeller. Furthermore, because of
the relatively larger hub, the propeller
efficiency is slightly lower.
CPpropellers are mostly used for
RoRo ships, shuttle tankers and simi
lar ships that require a high degree of
10
PT PD
PE
PB
Fig. 6: The propulsion of a ship – theory
Fixed pitch propeller (FPPropeller)
Monobloc with fixed
propeller blades
(copper alloy)
Fig. 7: Propeller types
Controllable pitch propeller (CPPropeller)
Hub with a mechanism
for control of the pitch
of the blades
(hydraulically activated)
S
manoeuvrability. For ordinary ships like
container ships, bulk carriers and crude
oil tankers sailing for a long time in nor
mal sea service at a given ship speed,
it will, in general, be a waste of money
to install an expensive CPpropeller in
stead of an FPpropeller. Furthermore, a
CPpropeller is more complicated, invol
ving a higher risk of problems in service.
VW V − V A
=
V
V
VA
( you get
=1 − w )
V
w=
The value of the wake fraction coefficient
depends largely on the shape of the
hull, but also on the propeller’s location
and size, and has great influence on
the propeller’s efficiency.
Flow conditions around the propeller
Wake fraction coefficient w
When the ship is moving, the friction of
the hull will create a socalled friction
belt or boundary layer of water around
the hull. In this friction belt the velocity
of the water on the surface of the hull is
equal to that of the ship, but is reduced
with its distance from the surface of the
hull. At a certain distance from the hull
and, per definition, equal to the outer
“surface” of the friction belt, the water
velocity is equal to zero.
The thickness of the friction belt increases
with its distance from the fore end of
the hull. The friction belt is therefore
thickest at the aft end of the hull and
this thickness is nearly proportional to
the length of the ship, Ref. [5]. This
means that there will be a certain wake
velocity caused by the friction along the
sides of the hull. Additionally, the ship’s
displacement of water will also cause
wake waves both fore and aft. All this
involves that the propeller behind the
hull will be working in a wake field.
Therefore, and mainly originating from
the friction wake, the water at the pro
peller will have an effective wake veloc
ity Vw which has the same direction as
the ship’s speed V, see Fig. 6. This
means that the velocity of arriving water
VA at the propeller, (equal to the speed
of advance of the propeller) given as
the average velocity over the propeller’s
disk area is Vw lower than the ship’s
speed V.
The effective wake velocity at the pro
peller is therefore equal to Vw = V – VA
and may be expressed in dimensionless
form by means of the wake fraction
coefficient w. The normally used wake
fraction coefficient w given by Taylor is
defined as:
The propeller diameter or, even better,
the ratio between the propeller diameter
d and the ship’s length LWL has some
influence on the wake fraction coeffi
cient, as d/LWL gives a rough indication
of the degree to which the propeller
works in the hull’s wake field. Thus, the
larger the ratio d/LWL, the lower w will
be. The wake fraction coefficient w in
creases when the hull is fouled.
For ships with one propeller, the wake
fraction coefficient w is normally in the
region of 0.20 to 0.45, corresponding
to a flow velocity to the propeller VA of
0.80 to 0.55 of the ship’s speed V. The
larger the block coefficient, the larger is
the wake fraction coefficient. On ships
with two propellers and a conventional
aftbody form of the hull, the propellers
will normally be positioned outside the
friction belt, for which reason the wake
fraction coefficient w will, in this case,
be a great deal lower. However, for a
twinskeg ship with two propellers, the
coefficient w will be almost unchanged
(or maybe slightly lower) compared
with the singlepropeller case.
Incidentally, a large wake fraction co
efficient increases the risk of propeller
cavitation, as the distribution of the
water velocity around the propeller is
generally very inhomogeneous under
such conditions.
A more homogeneous wake field for
the propeller, also involving a higher
speed of advance VA of the propeller,
may sometimes be needed and can be
obtained in several ways, e.g. by hav
ing the propellers arranged in nozzles,
below shields, etc. Obviously, the best
method is to ensure, already at the de
sign stage, that the aft end of the hull is
shaped in such a way that the opti
mum wake field is obtained.
Thrust deduction coefficient t
The rotation of the propeller causes the
water in front of it to be “sucked” back
towards the propeller. This results in an
extra resistance on the hull normally
called “augment of resistance” or, if re
lated to the total required thrust force T
on the propeller, “thrust deduction frac
tion” F, see Fig. 6. This means that the
thrust force T on the propeller has to
overcome both the ship’s resistance RT
and this “loss of thrust” F.
The thrust deduction fraction F may be
expressed in dimensionless form by
means of the thrust deduction coeffi
cient t, which is defined as:
F T − RT
=
T
T
RT
( you get
=1 − t )
T
t=
The thrust deduction coefficient t can
be calculated by using calculation
models set up on the basis of research
carried out on different models.
In general, the size of the thrust deduc
tion coefficient t increases when the
wake fraction coefficient w increases.
The shape of the hull may have a sig
nificant influence, e.g. a bulbous stem
can, under certain circumstances (low
ship speeds), reduce t.
The size of the thrust deduction coeffi
cient t for a ship with one propeller is,
normally, in the range of 0.12 to 0.30,
as a ship with a large block coefficient
has a large thrust deduction coefficient.
For ships with two propellers and a
conventional aftbody form of the hull,
the thrust deduction coefficient t will be
much less as the propellers’ “sucking”
occurs further away from the hull.
However, for a twinskeg ship with two
propellers, the coefficient t will be almost
unchanged (or maybe slightly lower)
compared with the singlepropeller case.
Efficiencies
Hull efficiency hH
The hull efficiency hH is defined as the
ratio between the effective (towing)
power PE = RT × V, and the thrust power
11
which the propeller delivers to the water
PT = T × VA, i.e.:
hH =
PE RT × V RT / T
1− t
=
=
=
PT T × V A V A / V
1− w
For a ship with one propeller, the hull
efficiency ηH is usually in the range of
1.1 to 1.4, with the high value for ships
with high block coefficients. For ships
with two propellers and a conventional
aftbody form of the hull, the hull effi
ciency ηH is approx. 0.95 to 1.05, again
with the high value for a high block co
efficient. However, for a twinskeg ship
with two propellers, the hull coefficient
ηH will be almost unchanged compared
with the singlepropeller case.
Open water propeller efficiency ηO
Propeller efficiency ηO is related to
working in open water, i.e. the propel
ler works in a homogeneous wake field
with no hull in front of it.
The propeller efficiency depends, es
pecially, on the speed of advance VA,
thrust force T, rate of revolution n, di
ameter d and, moreover, i.a. on the de
sign of the propeller, i.e. the number of
blades, disk area ratio, and pitch/diam
eter ratio – which will be discussed
later in this chapter. The propeller effi
ciency ηO can vary between approx.
0.35 and 0.75, with the high value be
ing valid for propellers with a high
speed of advance VA, Ref. [3].
Fig. 8 shows the obtainable propeller
efficiency ηO shown as a function of the
speed of advance VA, which is given in
dimensionless form as:
J=
VA
n× d
where J is the advance number of the
propeller.
Relative rotative efficiency ηR
The actual velocity of the water flowing
to the propeller behind the hull is nei
ther constant nor at right angles to the
propeller’s disk area, but has a kind of
rotational flow. Therefore, compared
with when the propeller is working in
open water, the propeller’s efficiency is
12
Propeller
efficiency
Small tankers
20,000 DWT
Large tankers
>150,000 DWT
Reefers
Container ships
o
0.7
0.6
n ( revs./s )
1.66
0.5
2.00
0.4
0.3
0.2
0.1
0
0
0.1
0.2
0.3
0.4
0.7
0.6
0.5
Advance number J =
VA
nxd
Fig. 8: Obtainable propeller efficiency – open water, Ref. [3], page 213
affected by the ηR factor – called the
propeller’s relative rotative efficiency.
On ships with a single propeller the
rotative efficiency ηR is, normally, around
1.0 to 1.07, in other words, the rotation
of the water has a beneficial effect. The
rotative efficiency ηR on a ship with a
conventional hull shape and with two
propellers will normally be less, approx.
0.98, whereas for a twinskeg ship with
two propellers, the rotative efficiency ηR
will be almost unchanged.
In combination with w and t, ηR is prob
ably often being used to adjust the re
sults of model tank tests to the theory.
Propeller efficiency ηB working behind
the ship
The ratio between the thrust power PT,
which the propeller delivers to the wa
ter, and the power PD, which is deliv
ered to the propeller, i.e. the propeller
efficiency ηB for a propeller working
behind the ship, is defined as:
hB =
PT
= ho × hR
PD
Propulsive efficiency ηD
The propulsive efficiency ηD, which
must not be confused with the open
water propeller efficiency ηO, is equal to
the ratio between the effective (towing)
power PE and the necessary power
delivered to the propeller PD, i.e.:
hD =
PE PE PT
=
×
PD PT PD
= η H × ηB = ηH × η O × η R
As can be seen, the propulsive efficiency
ηD is equal to the product of the hull
efficiency ηH, the open water propeller
efficiency ηO, and the relative rotative
efficiency ηR, although the latter has
less significance.
In this connection, one can be led to
believe that a hull form giving a high
wake fraction coefficient w, and hence
a high hull efficiency ηH, will also provide
the best propulsive efficiency ηD.
However, as the open water propeller
efficiency ηO is also greatly dependent
on the speed of advance VA, cf. Fig. 8,
that is decreasing with increased w,
the propulsive efficiency ηD will not,
generally, improve with increasing w,
quite often the opposite effect is obtained.
Generally, the best propulsive efficiency
is achieved when the propeller works in
a homogeneous wake field.
Shaft efficiency ηS
The shaft efficiency ηS depends, i.a. on
the alignment and lubrication of the
shaft bearings, and on the reduction
gear, if installed.
Shaft efficiency is equal to the ratio be
tween the power PD delivered to the
propeller and the brake power PB deliv
ered by the main engine, i.e.
PD
hS =
PB
The shaft efficiency is normally around
0.985, but can vary between 0.96 and
0.995.
Total efficiency ηT
The total efficiency ηT, which is equal to
the ratio between the effective (towing)
power PE, and the necessary brake
power PB delivered by the main engine,
can be expressed thus:
hT =
PE PE PD
=
×
PB PD PB
= ηD × η S = η H × η O × η R × η S
Propeller dimensions
Propeller diameter d
With a view to obtaining the highest
possible propulsive efficiency ηD, the
largest possible propeller diameter d
will, normally, be preferred. There are,
however, special conditions to be con
sidered. For one thing, the aftbody form
of the hull can vary greatly depending on
type of ship and ship design, for another,
the necessary clearance between the
tip of the propeller and the hull will de
pend on the type of propeller.
For bulkers and tankers, which are often
sailing in ballast condition, there are
frequent demands that the propeller
shall be fully immersed also in this con
dition, giving some limitation to the pro
peller size. This propeller size limitation
is not particularly valid for container
ships as they rarely sail in ballast condi
tion. All the above factors mean that an
exact propeller diameter/design draught
ratio d/D cannot be given here but, as
a ruleofthumb, the below mentioned
approximations of the diameter/design
draught ratio d/D can be presented,
and a large diameter d will, normally,
result in a low rate of revolution n.
Bulk carrier and tanker:
Twobladed propellers are used on
small ships, and 4, 5 and 6bladed
propellers are used on large ships.
Ships using the MAN B&W twostroke
engines are normally largetype vessels
which use 4bladed propellers. Ships
with a relatively large power requirement
and heavily loaded propellers, e.g. con
tainer ships, may need 5 or 6bladed
propellers. For vibrational reasons, pro
pellers with certain numbers of blades
may be avoided in individual cases in
order not to give rise to the excitation
of natural frequencies in the ship’s hull
or superstructure, Ref. [5].
Disk area coefficient
The disk area coefficient – referred to in
older literature as expanded blade area
ratio – defines the developed surface
area of the propeller in relation to its
disk area. A factor of 0.55 is considered
as being good. The disk area coefficient
of traditional 4bladed propellers is of
little significance, as a higher value will
only lead to extra resistance on the
propeller itself and, thus, have little ef
fect on the final result.
For ships with particularly heavyloaded
propellers, often 5 and 6bladed pro
pellers, the coefficient may have a
higher value. On warships it can be as
high as 1.2.
d/D < approximately 0.65
Container ship:
d/D < approximately 0.74
For strength and production reasons,
the propeller diameter will generally not
exceed 10.0 metres and a power out
put of about 90,000 kW. The largest
diameter propeller manufactured so far
is of 11.0 metres and has four propeller
blades.
Number of propeller blades
Propellers can be manufactured with 2,
3, 4, 5 or 6 blades. The fewer the num
ber of blades, the higher the propeller
efficiency will be. However, for reasons
of strength, propellers which are to be
subjected to heavy loads cannot be
manufactured with only two or three
blades.
Pitch diameter ratio p/d
The pitch diameter ratio p/d, expresses
the ratio between the propeller’s pitch
p and its diameter d, see Fig. 10. The
pitch p is the distance the propeller
“screws” itself forward through the wa
ter per revolution, providing that there
is no slip – see also the next section
and Fig. 10. As the pitch can vary
along the blade’s radius, the ratio is
normally related to the pitch at 0.7 × r,
where r = d/2 is the propeller’s radius.
To achieve the best propulsive efficiency
for a given propeller diameter, an optimum
pitch/diameter ratio is to be found,
which again corresponds to a particu
lar design rate of revolution. If, for
instance, a lower design rate of revolution
is desired, the pitch/diameter ratio has
to be increased, and vice versa, at the
cost of efficiency. On the other hand, if
a lower design rate of revolution is de
sired, and the ship’s draught permits,
the choice of a larger propeller diame
13
ter may permit such a lower design rate
of revolution and even, at the same time,
increase the propulsive efficiency.
Propeller coefficients J, KT and KQ
Propeller theory is based on models,
but to facilitate the general use of this
theory, certain dimensionless propeller
coefficients have been introduced in re
lation to the diameter d, the rate of rev
olution n, and the water’s mass density
r. The three most important of these
coefficients are mentioned below.
The advance number of the propeller J
is, as earlier mentioned, a dimensionless
expression of the propeller’s speed of
advance VA.
J=
VA
n× d
The thrust force T, is expressed
dimensionless, with the help of the
thrust coefficient KT, as
KT =
T
r× n × d4
2
The price of the propeller, of course,
depends on the selected accuracy
class, with the lowest price for class III.
However, it is not recommended to
use class III, as this class has a too
high tolerance. This again means that
the mean pitch tolerance should nor
mally be less than +/– 1.0 %.
ISO 484/1 – 1981 (CE)
Manufacturing
accuracy
Mean pitch
for propel
ler
Very high accuracy
High accuracy
Medium accuracy
Wide tolerances
+/– 0.5 %
+/– 0.75 %
+/– 1.00 %
+/– 3.00 %
Class
S
I
II
III
The manufacturing accuracy tolerance
corresponds to a propeller speed toler
ance of max. +/– 1.0 %. When also in
corporating the influence of the tolerance
on the wake field of the hull, the total
propeller tolerance on the rate of revo
lution can be up to +/– 2.0 %. This tol
erance has also to be borne in mind
when considering the operating condi
tions of the propeller in heavy weather.
Table 5: Manufacturing accuracy classes
of a propeller
Manufacturing accuracy of the propeller
Before the manufacturing of the propeller,
the desired accuracy class standard of
the propeller must be chosen by the
customer. Such a standard is, for ex
ample, ISO 484/1 – 1981 (CE), which
has four different “Accuracy classes”,
see Table 5.
Influence of propeller diameter and
pitch/diameter ratio on propulsive
efficiency D.
As already mentioned, the highest pos
sible propulsive efficiency required to
provide a given ship speed is obtained
with the largest possible propeller dia
meter d, in combination with the corre
sponding, optimum pitch/diameter ra
tio p/d.
Each of the classes, among other de
tails, specifies the maximum allowable
tolerance on the mean design pitch of
the manufactured propeller, and
thereby the tolerance on the correspond
ing propeller speed (rate of revolution).
and the propeller torque
Q=
PD
2p × n
is expressed dimensionless with the
help of the torque coefficient KQ, as
KQ =
Q
r × n2 × d 5
The propeller efficiency hO can be cal
culated with the help of the abovemen
tioned coefficients, because, as previously
mentioned, the propeller efficiency hO is
defined as:
hO =
PT
T × VA
KT
J
=
=
×
PD Q × 2 p × n K Q 2 p
Shaft power
kW
9,500
80,000 dwt crude oil tanker
Design draught = 12.2 m
Ship speed
= 14.5 kn
9,400
p/d
9,300
14
d
6.6 m
1.00
9,200
6.8 m
0.95
9,100
0.90
9,000
7.0 m
0.85
0.80
8,900
8,800
7.4 m
8,700
d
8,600
0.70
70
80
0.60
0.65
p/d
0.67
0.50
0.55
Power and speed curve
for the given propeller
diameter d = 7.2 m with
different p/d
Power and speed curve
for various propeller
diameters d with
optimum p/d
Propeller speed
0.71
p/d
90
0.68
0.69
7.2 m
0.75
8,500
With the help of special and very com
plicated propeller diagrams, which
contain, i.a. J, KT and KQ curves, it is
possible to find/calculate the propeller’s
dimensions, efficiency, thrust, power, etc.
p/d
d = Propeller diameter
p/d = Pitch/diameter ratio
100
110
Fig. 9: Propeller design – influence of diameter and pitch
120
130 r/min
As an example for an 80,000 dwt crude
oil tanker, with a service ship speed of
14.5 knots and a maximum possible
propeller diameter of 7.2 m, this influence
is shown in Fig. 9.
According to the blue curve, the maxi
mum possible propeller diameter of 7.2
m may have the optimum pitch/diame
ter ratio of 0.70, and the lowest possi
ble shaft power of 8,820 kW at 100
r/min. If the pitch for this diameter is
changed, the propulsive efficiency will
be reduced, i.e. the necessary shaft
power will increase, see the red curve.
Pitch p
Slip
0.7 x r
d
r
n
The blue curve shows that if a bigger
propeller diameter of 7.4 m is possible,
the necessary shaft power will be re
duced to 8,690 kW at 94 r/min, i.e. the
bigger the propeller, the lower the opti
mum propeller speed.
The red curve also shows that propul
sionwise it will always be an advan
tage to choose the largest possible
propeller diameter, even though the
optimum pitch/diameter ratio would
involve a too low propeller speed (in rela
tion to the required main engine speed).
Thus, when using a somewhat lower
pitch/diameter ratio, compared with the
optimum ratio, the propeller/ engine
speed may be increased and will only
cause a minor extra power increase.
Sxpxn
V or VA
pxn
pxn_V
V
=1_
pxn
pxn
p x n _ VA
VA
: SR =
=1_
pxn
pxn
The apparent slip ratio : SA =
The real slip ratio
Fig. 10: Movement of a ship´s propeller, with pitch p and slip ratio S
The apparent slip ratio SA, which is
dimensionless, is defined as:
SA =
The apparent slip ratio SA, which is cal
culated by the crew, provides useful
knowledge as it gives an impression of
the loads applied to the propeller under
different operating conditions. The ap
parent slip ratio increases when the
p × n−V
V
=1−
p× n
p× n
Operating conditions of a propeller
Velocity of corkscrew: V = p x n
Pitch p
Slip ratio S
If the propeller had no slip, i.e. if the
water which the propeller “screws”
itself through did not yield (i.e. if the
water did not accelerate aft), the pro
peller would move forward at a speed
of V = p × n, where n is the propeller’s
rate of revolution, see Fig. 10.
The similar situation is shown in Fig. 11
for a cork screw, and because the cork
is a solid material, the slip is zero and,
therefore, the cork screw always moves
forward at a speed of V = p × n. How
ever, as the water is a fluid and does
yield (i.e. accelerate aft), the propeller’s
apparent speed forward decreases
with its slip and becomes equal to the
ship’s speed V, and its apparent slip
can thus be expressed as p × n – V.
V
n
Corkscrew
Cork
Wine bottle
Fig. 11: Movement of a corkscrew, without slip
15
vessel sails against the wind or waves,
in shallow waters, when the hull is
fouled, and when the ship accelerates.
Under increased resistance, this in
volves that the propeller speed (rate of
revolution) has to be increased in order
to maintain the required ship speed.
The real slip ratio will be greater than
the apparent slip ratio because the real
speed of advance VA of the propeller is,
as previously mentioned, less than the
ship’s speed V.
The real slip ratio SR, which gives a truer
picture of the propeller’s function, is:
sonable relationship to be used for esti
mations in the normal ship speed range
could be as follows:
and heavy weather). These diagrams us
ing logarithmic scales and straight lines
are described in detail in Chapter 3.
• For large highspeed ships like con
tainer vessels: P = c × V 4.5
Propeller performance in general at
increased ship resistance
The difference between the abovemen
tioned light and heavy running propeller
curves may be explained by an exam
ple, see Fig. 12, for a ship using, as ref
erence, 15 knots and 100% propulsion
power when running with a clean hull in
calm weather conditions. With 15% more
power, the corresponding ship speed
may increase from 15.0 to 15.6 knots.
• For mediumsized, mediumspeed
ships like feeder container ships,
reefers, RoRo ships, etc.: P = c × V 4.0
• For lowspeed ships like tankers and
bulk carriers, and small feeder con
tainer ships, etc.: P = c × V 3.5
At quay trials where the ship’s speed is
V = 0, both slip ratios are 1.0. Incidentally,
slip ratios are often given in percentages.
Propeller law for heavy running propeller
The propeller law, of course, can only
be applied to identical ship running
conditions. When, for example, the
ship’s hull after some time in service
has become fouled and thus become
more rough, the wake field will be different
from that of the smooth ship (clean hull)
valid at trial trip conditions.
Propeller law in general
As discussed in Chapter 1, the resis
tance R for lower ship speeds is pro
portional to the square of the ship’s
speed V, i.e.:
A ship with a fouled hull will, conse
quently, be subject to extra resistance
which will give rise to a “heavy propeller
condition”, i.e. at the same propeller
power, the rate of revolution will be lower.
VA
V × (1 − w )
SR =1−
=1−
p× n
p× n
R = c × V2
where c is a constant. The necessary
power requirement P is thus propor
tional to the speed V to the power of
three, thus:
P = R × V = c × V3
For a ship equipped with a fixed pitch
propeller, i.e. a propeller with unchange
able pitch, the ship speed V will be pro
portional to the rate of revolution n, thus:
P = c × n3
which precisely expresses the propeller
law, which states that “the necessary
power delivered to the propeller is pro
portional to the rate of revolution to the
power of three”.
Actual measurements show that the
power and engine speed relationship
for a given weather condition is fairly
reasonable, whereas the power and
ship speed relationship is often seen
with a higher power than three. A rea
16
The propeller law now applies to an
other and “heavier” propeller curve
than that applying to the clean hull,
propeller curve, Ref. [3], page 243.
The same relative considerations apply
when the ship is sailing in a heavy sea
against the current, a strong wind, and
heavy waves, where also the heavy
waves in tail wind may give rise to a
heavier propeller running than when
running in calm weather. On the other
hand, if the ship is sailing in ballast
condition, i.e. with a lower displace
ment, the propeller law now applies to
a “lighter” propeller curve, i.e. at the
same propeller power, the propeller
rate of revolution will be higher.
As mentioned previously, for ships with
a fixed pitch propeller, the propeller law
is extensively used at part load running.
It is therefore also used in MAN B&W
Diesel’s engine layout and load diagrams
to specify the engine’s operational
curves for light running conditions (i.e.
clean hull and calm weather) and heavy
running conditions (i.e. for fouled hull
As described in Chapter 3, and com
pared with the calm weather conditions,
it is normal to incorporate an extra
power margin, the socalled sea mar
gin, which is often chosen to be 15%.
This power margin corresponds to ex
tra resistance on the ship caused by
the weather conditions. However, for
very rough weather conditions the influ
ence may be much greater, as de
scribed in Chapter 1.
In Fig. 12a, the propulsion power is
shown as a function of the ship speed.
When the resistance increases to a
level which requires 15% extra power
to maintain a ship speed of 15 knots,
the operating point A will move towards
point B.
In Fig. 12b the propulsion power is
now shown as a function of the propeller
speed. As a first guess it will often be as
sumed that point A will move towards B’
because an unchanged propeller speed
implies that, with unchanged pitch, the
propeller will move through the water
at an unchanged speed.
If the propeller was a corkscrew moving
through cork, this assumption would
be correct. However, water is not solid
as cork but will yield, and the propeller
will have a slip that will increase with in
creased thrust caused by increased
hull resistance. Therefore, point A will
move towards B which, in fact, is very
close to the propeller curve through A.
Point B will now be positioned on a
propeller curve which is slightly heavy
running compared with the clean hull
and calm weather propeller curve.
Power
15.0 knots
115% power
B´
B
15%
Sea
margin
B
Slip
15.6 knots
115% power
D´
15.6 knots
115% power
15%
Sea
margin
Propeller curve for clean
hull and calm weather
Propeller curve for clean
hull and calm weather
Propeller
curve for
fouled hull
and heavy
seas
Ship speed
(Logarithmic scales)
D
A Power
12.3 knots
50% power
C
HR
LR
A
A
15.0 knots
100% power
Propeller curve
for clean hull and
calm weather
10.0 knots
50% power
15.0 knots
100% power
15.0 knots
100% power
12.3 knots
100% power
Slip
Power
15.0 knots
115% power
Propeller speed
HR = Heavy running
LR = Light running
Propeller speed
(Logarithmic scales)
(Logarithmic scales)
Fig. 12a: Ship speed performance at 15%
sea margin
Fig. 12b: Propeller speed performance at
15% sea margin
Fig. 12c: Propeller speed performance at
large extra ship resistance
Sometimes, for instance when the hull
is fouled and the ship is sailing in heavy
seas in a head wind, the increase in
resistance may be much greater, cor
responding to an extra power demand
of the magnitude of 100% or even higher.
An example is shown in Fig. 12c.
a ducted propeller, the opposite effect
is obtained.
can be up to 78% heavier running
than in calm weather, i.e. at the same
propeller power, the rate of revolution
may be 78% lower. An example valid
for a smaller container ship is shown in
Fig. 13. The service data is measured
In this example, where 100% power
will give a ship speed of 15.0 knots,
point A, a ship speed of, for instance,
12.3 knots at clean hull and in calm
weather conditions, point C, will require
about 50% propulsion power but, at
the abovementioned heavy running
conditions, it might only be possible to
obtain the 12.3 knots by 100% propulsion
power, i.e. for 100% power going from
point A to D. Running point D may now
be placed relatively far to the left of point
A, i.e. very heavy running. Such a situ
ation must be considered when laying
out the main engine in relation to the
layout of the propeller, as described in
Chapter 3.
A scewed propeller (with bent blade
tips) is more sensitive to heavy running
than a normal propeller, because the
propeller is able to absorb a higher
torque in heavy running conditions. For
Heavy waves and sea and wind against
When sailing in heavy sea against, with
heavy wave resistance, the propeller
BHP
21,000
Shaft power
Ap
10% pare
6% nt s
2% lip
2%
Heavy
running
C
Extremely bad weather 6%
18,000
B
Average weather
3%
A
Extremely good weather 0%
15,000
12,000
C
Clean hull and draught D
DMEAN = 6.50 m
DF
= 5.25 m
DA
= 7.75 m
Source: Lloyd's Register
9,000 13
6,000
B
16 A
Sh
ip
s 19
kn pee
ots d
76
80
22
84
88
92
96
100 r/min
Propeller speed
Fig. 13: Service data over a period of a year returned from a single screw container ship
17
SMCR: 13,000 kW x 105 r/min
Wind velocity : 2.5 m/s
Wave height : 4 m
Shaft power
% SMCR
105
Head wind
Tail wind
*22.0
SMCR
100
7
22.3 *
5
1
95
4
90
g
En
e
op
pr
"
ve
ur Propeller design
c
r
le
light running
el
"
in
*
85
rc
80
lle
ll
e
op
Pr
96
20.5
21.8
* * 20.5 *
21.5
21.1 *
3
20.8*
ve
ur
e
op
Pr
Heavy
running
21.1 *
ve
ur
c
er
97
98
*21.2
99
100
(Logarithmic scales)
101
102
103
104 105 % SMCR
Propeller/engine speed
Fig. 14: Measured relationship between power, propeller and ship speed during seatrial of
a reefer ship
over a period of one year and only
includes the influence of weather con
ditions! The measuring points have
been reduced to three average weather
conditions and show, for extremely bad
weather conditions, an average heavy
running of 6%, and therefore, in prac
tice, the heavy running has proved to
be even greater.
In order to avoid slamming of the ship,
and thereby damage to the stem and
racing of the propeller, the ship speed
will normally be reduced by the navigat
ing officer on watch.
Another measured example is shown
in Fig. 14, and is valid for a reefer ship
during its sea trial. Even though the
wind velocity is relatively low, only 2.5
m/s, and the wave height is 4 m, the
18
measurements indicate approx. 1.5%
heavy running when sailing in head
wind out, compared with when sailing
in tail wind on return.
Ship acceleration
When the ship accelerates, the propel
ler will be subjected to an even larger
load than during free sailing. The power
required for the propeller, therefore, will
be relatively higher than for free sailing,
and the engine’s operating point will be
heavy running, as it takes some time
before the propeller speed has reached
its new and higher level. An example
with two different accelerations, for an
engine without electronic governor and
scavenge air pressure limiter, is shown
in Fig. 15. The load diagram and scav
enge air pressure limiter are is described
in Chapter 3.
Shallow waters
When sailing in shallow waters, the re
sidual resistance of the ship may be in
creased and, in the same way as when
the ship accelerates, the propeller will
be subjected to a larger load than dur
ing free sailing, and the propeller will be
heavy running.
Influence of displacement
When the ship is sailing in the loaded
condition, the ship’s displacement vol
ume may, for example, be 10% higher
or lower than for the displacement valid
for the average loaded condition. This,
of course, has an influence on the ship’s
resistance, and the required propeller
power, but only a minor influence on
the propeller curve.
On the other hand, when the ship is
sailing in the ballast condition, the dis
placement volume, compared to the
loaded condition, can be much lower,
and the corresponding propeller curve
may apply to, for example, a 2% “lighter”
propeller curve, i.e. for the same power
to the propeller, the rate of revolution
will be 2% higher.
Parameters causing heavy running
propeller
Together with the previously described
operating parameters which cause a
heavy running propeller, the parame
ters summarised below may give an in
dication of the risk/sensitivity of getting
a heavy running propeller when sailing
in heavy weather and rough seas:
1 Relatively small ships (<70,000 dwt)
such as reefers and small container
ships are sensitive whereas large ships,
such as large tankers and container
ships, are less sensitive because the
waves are relatively small compared
to the ship size.
2 Small ships (Lpp < 135 m ≈ 20,000 dwt)
have low directional stability and,
therefore, require frequent rudder
corrections, which increase the ship
resistance (a selfcontrolled rudder
will reduce such resistance).
3 Highspeed ships
are more sensitive than lowspeed
ships because the waves will act on
the fastgoing ship with a relatively
power will be needed but, of course,
this will be higher for running in heavy
weather with increased resistance on
the ship.
Engine shaft power, % A
A 100% reference point
M Specified engine MCR
O Optimising point
110
100
A=M
O
90
80
mep
110%
70
Therefore, a clockwise (looking from aft
to fore) rotating propeller will tend to
push the ship’s stern in the starboard
direction, i.e. pushing the ship’s stem
to port, during normal ahead running.
This has to be counteracted by the
rudder.
100%
90%
60
80%
50
Direction of propeller rotation (side thrust)
When a ship is sailing, the propeller
blades bite more in their lowermost po
sition than in their uppermost position.
The resulting sidethrust effect is larger
the more shallow the water is as, for
example, during harbour manoeuvres.
70%
60%
40
60
65
70
75
80
(Logarithmic scales)
85
90
95 100 105
Engine speed, % A
Fig. 15: Load diagram – acceleration
larger force than on the slowgoing
ship.
4 Ships with a “flat” stem
may be slowed down faster by waves
than a ship with a “sharp” stem.
Thus an axeshaped upper bow may
better cut the waves and thereby
reduce the heavy running tendency.
5 Fouling of the hull and propeller
will increase both hull resistance and
propeller torque. Polishing the pro
peller (especially the tips) as often as
possible (also when in water) has a
positive effect. The use of effective
antifouling paints will prevent fouling
caused by living organisms.
6 Ship acceleration
will increase the propeller torque,
and thus give a temporarily heavy
running propeller.
7 Sailing in shallow waters
increases the hull resistance and re
duces the ship’s directional stability.
8 Ships with scewed propeller
are able to absorb a higher torque
under heavy running conditions.
Manoeuvring speed
Below a certain ship speed, called the
manoeuvring speed, the manoeuvra
bility of the rudder is insufficient be
cause of a too low velocity of the water
arriving at the rudder. It is rather difficult
to give an exact figure for an adequate
manoeuvring speed of the ship as the
velocity of the water arriving at the rud
der depends on the propeller’s slip
stream.
When reversing the propeller to astern
running as, for example, when berthing
alongside the quay, the sidethrust ef
fect is also reversed and becomes fur
ther pronounced as the ship’s speed
decreases. Awareness of this behav
iour is very important in critical situa
tions and during harbour manoeuvres.
According to Ref. [5], page 153, the
real reason for the appearance of the
side thrust during reversing of the pro
peller is that the upper part of the pro
peller’s slip stream, which is rotative,
strikes the aftbody of the ship.
Thus, also the pilot has to know pre
cisely how the ship reacts in a given
situation. It is therefore an unwritten
law that on a ship fitted with a fixed
pitch propeller, the propeller is always
designed for clockwise rotation when
sailing ahead. A direct coupled main
engine, of course, will have the same
rotation.
In order to obtain the same sidethrust
effect, when reversing to astern, on
ships fitted with a controllable pitch
propeller, CPpropellers are designed
for anticlockwise rotation when sailing
ahead.
Often a manoeuvring speed of the
magnitude of 3.54.5 knots is men
tioned. According to the propeller law,
a correspondingly low propulsion
19
Propulsion and engine running
points
Engine Layout and
Load Diagrams
Power functions and logarithmic
scales
As is wellknown, the effective brake
power PB of a diesel engine is propor
tional to the mean effective pressure
(mep) pe and engine speed (rate of rev
olution) n. When using c as a constant,
PB may then be expressed as follows:
Propeller design point PD
Normally, estimations of the necessary
propeller power and speed are based
on theoretical calculations for loaded
ship, and often experimental tank tests,
both assuming optimum operating
conditions, i.e. a clean hull and good
weather. The combination of speed
and power obtained may be called the
ship’s propeller design point PD placed
on the light running propeller curve 6,
PB = c × pe × n
or, in other words, for constant mep
the power is proportional to the speed:
y
PB = c × n1 (for constant mep)
As already mentioned – when running
with a fixed pitch propeller – the power
may, according to the propeller law, be
expressed as:
P B = c × n3
a
1
b
X
0
1
2
A. Straight lines in linear scales
0
(propeller law)
Thus, for the above examples, the brake
power PB may be expressed as a func
tion of the speed n to the power of i, i.e.
PB = c × n
i
Fig. 16 shows the relationship between
the linear functions, y = ax + b, see (A),
using linear scales and the power func
i
tions PB = c × n , see (B), using logarith
mic scales.
y = log (PB)
log (PB) = i × log (n) + log (c)
which is equivalent to:
y = ax + b
Thus, propeller curves will be parallel to
lines having the inclination i = 3, and
lines with constant mep will be parallel
to lines with the inclination i = 1.
Therefore, in the layout and load diagrams
for diesel engines, as described in the
following, logarithmic scales are used,
making simple diagrams with straight
lines.
y = log (PB) = log (c x ni )
i=0
i=2
i=3
Fouled hull
When the ship has been sailing for
some time, the hull and propeller be
come fouled and the hull’s resistance
will increase. Consequently, the ship
speed will be reduced unless the engine
delivers more power to the propeller, i.e.
the propeller will be further loaded and
will become heavy running HR.
Furthermore, newer highefficiency ship
types have a relatively high ship speed,
and a very smooth hull and propeller
surface (at sea trial) when the ship is
delivered. This means that the inevitable
buildup of the surface roughness on
the hull and propeller during sea service
after seatrial may result in a relatively
heavier running propeller, compared
with older ships born with a more rough
hull surface.
Heavy weather and sea margin used
for layout of engine
If, at the same time, the weather is
bad, with head winds, the ship’s resis
tance may increase much more, and
lead to even heavier running.
When determining the necessary en
gine power, it is normal practice to add
an extra power margin, the socalled
sea margin, which is traditionally about
15% of the propeller design PD power.
However, for large container ships,
2030% may sometimes be used.
i=1
The power functions will be linear when
using logarithmic scales, as:
20
y = ax + b
2
see Fig. 17. On the other hand, some
shipyards and/or propeller manufactur
ers sometimes use a propeller design
point PD´ that incorporates all or part of
the socalled sea margin described be
low.
x = log (n)
PB = engine brake power
c = constant
n = engine speed
log(PB) = i x log(n) + log(c)
PB = c x ni
y
ax + b
=
B. Power function curves
in logarithmic scales
Fig. 16: Relationship between linear functions
using linear scales and power functions
using logarithmic scales
When determining the necessary en
gine speed, for layout of the engine, it
is recommended – compared with the
clean hull and calm weather propeller
curve 6 – to choose the heavier propel
ler curve 2, see Fig. 17, corresponding
to curve 6 having a 37% higher rate of
revolution than curve 2, and in general
with 5% as a good choice.
Note that the chosen sea power mar
gin does not equalise the chosen
heavy engine propeller curve.
Power
MP
Engine margin
(10% of MP)
SP
PD´
Sea margin
(15% of PD)
the engine operating curve in service,
curve 2, whereas the light propeller
curve for clean hull and calm weather,
curve 6, may be valid for running con
ditions with new ships, and equal to
the layout/design curve of the propel
ler. Therefore, the light propeller curve
for clean hull and calm weather is said
to represent a “light running” LR pro
peller and will be related to the heavy
propeller curve for fouled hull and
heavy weather condition by means of a
light running factor fLR, which, for the
same power to the propeller, is defined
as the percentage increase of the rate
of revolution n, compared to the rate of
revolution for heavy running, i.e.
PD
fLR =
LR(5%)
2
6
HR
Engine speed
2
6
MP:
SP:
PD:
Pd´:
LR:
HR:
Heavy propeller curve _ fouled hull and heavy weather
Light propeller curve _ clean hull and calm weather
Specified propulsion point
Service propulsion point
Propeller design point
Alternative propeller design point
Light running factor
Heavy running
nlight − nheavy
nheavy
×100%
Engine margin
Besides the sea margin, a socalled
“engine margin” of some 1015% is
frequently added as an operational
margin for the engine. The correspond
ing point is called the “specified MCR
for propulsion” MP, see Fig. 17, and
refers to the fact that the power for
point SP is 1015% lower than for
point MP, i.e. equal to 9085% of MP.
Specified MCR M
The engine’s specified MCR point M is
the maximum rating required by the
yard or owner for continuous operation
of the engine. Point M is identical to the
specified propulsion MCR point MP un
less a main engine driven shaft genera
tor is installed. In such a case, the extra
power demand of the shaft generator
must also be considered.
Fig. 17: Ship propulsion running points and engine layout
Continuous service propulsion point SP
The resulting speed and power combi
nation – when including heavy propeller
running and sea margin – is called the
“continuous service rating for propulsion”
SP for fouled hull and heavy weather.
The heavy propeller curve, curve 2, for
fouled hull and heavy weather will nor
mally be used as the basis for the en
gine operating curve in service, and the
propeller curve for clean hull and calm
weather, curve 6, is said to represent a
“light running” LR propeller.
Continuous service rating S
The continuous service rating is the
power at which the engine, including
the sea margin, is assumed to operate,
and point S is identical to the service
propulsion point SP unless a main en
gine driven shaft generator is installed.
Light running factor fLR
The heavy propeller curve for a fouled
hull and heavy weather, and if no shaft
generator is installed may, as mentioned
above, be used as the design basis for
Note:
Light/heavy running, fouling and sea
margin are overlapping terms.
Light/heavy running of the propeller re
fers to hull and propeller deterioration,
and bad weather, and sea margin, i.e.
extra power to the propeller, refers to
the influence of the wind and the sea.
Based on feedback from service, it
seems reasonable to design the pro
peller for 37% light running. The de
gree of light running must be decided
upon, based on experience from the
actual trade and hull design, but 5%
is often a good choice.
21
gine may be drawnin. The specified
MCR point M must be inside the limita
tion lines of the layout diagram; if it is
not, the propeller speed will have to be
changed or another main engine type
must be chosen. Yet, in special cases,
point M may be located to the right of
line L1L2, see “Optimising/Matching
Point” below.
Engine shaft power, % A
110
A 100% reference point
M Specified engine MCR
O Optimising point
100
A=M
7
5
90
O
Optimising point O
The “Optimising (MC)/Matching (ME)
point” O – or, better, the layout point of
the engine – is the rating at which the
engine (timing and) compression ratio
are adjusted, with consideration to the
scavenge air pressure of the turbocharger.
80
10
mep
110%
70
8
100%
4
6
2
90%
60
1
80%
3
50
70%
9
60%
40
60
65
70
75
80
85
90
95
100 105
Engine speed, % A
Line 1: Propeller curve through optimising point (O) _ layout curve for engine
Line 2: Heavy propeller curve _ fouled hull and heavy seas
Line 3: Speed limit
Line 4: Torque/speed limit
Line 5: Mean effective pressure limit
Line 6: Light propeller curve _ clean hull and calm weather _ layout curve for propeller
Line 7: Power limit for continuous running
Line 8: Overload limit
Line 9: Sea trial speed limit
Line 10: Constant mean effective pressure (mep) lines
Fig. 18: Engine load diagram
As mentioned below, under “Load dia
gram”, the optimising point O (later on
in this paper also used in general
where matching point for ME engines
was the correct one) is placed on line 1
(layout curve of engine) of the load dia
gram, and the optimised power can be
from 85 to 100% of point M‘s power.
Overload running will still be possible
(110% of M‘s power), as long as consid
eration to the scavenge air pressure has
been taken.
The optimising point O is to be placed
inside the layout diagram. In fact, the
specified MCR point M can be placed
outside the layout diagram, but only by
exceeding line L1L2, and, of course,
only provided that the optimising point
O is located inside the layout diagram.
It should be noted that MC/MCC en
gines without VIT (variable injection tim
ing) fuel pumps cannot be optimised at
partload. Therefore, these engines are
always optimised in point A, i.e. having
point M‘s power.
Load diagram
Engine layout diagram
An engine’s layout diagram is limited by
two constant mean effective pressure
(mep) lines L1L3 and L2L4, and by two
constant engine speed lines L1L2 and
L3L4, see Fig. 17. The L1 point refers to
the engine’s nominal maximum contin
uous rating. Within the layout area
there is full freedom to select the en
gines specified MCR point M and rele
vant optimising point O, see below,
22
which is optimum for the ship and the
operating profile. Please note that the
lowest specific fuel oil consumption for
a given optimising point O will be ob
tained at 70% and 80% of point O’s
power, for electronically (ME) and me
chanically (MC) controlled engines,
respectively.
Definitions
The load diagram (Fig. 18) defines the
power and speed limits for continuous
as well as overload operation of an in
stalled engine which has an optimising
point O and a specified MCR point M
that conforms to the ship’s specification.
Based on the propulsion and engine
running points, as previously found, the
layout diagram of a relevant main en
Point A is a 100% speed and power
reference point of the load diagram,
and is defined as the point on the pro
peller curve (line 1) – the layout curve of
the engine – through the optimising point
O, having the specified MCR power.
Normally, point M is equal to point A,
but in special cases, for example if a
shaft generator is installed, point M
may be placed to the right of point A
on line 7. The service points of the in
stalled engine incorporate the engine
power required for ship propulsion and
for the shaft generator, if installed.
During shoptest running, the engine will
always operate along curve 1, with
point A as 100% MCR. If CPpropeller
and constant speed operation is re
quired, the delivery test may be fin
ished with a constant speed test.
Limits to continuous operation
The continuous service range is limited
by the four lines 4, 5, 7 and 3 (9), see
Fig. 18:
Line 3 and line 9
Line 3 represents the maximum accept
able speed for continuous operation, i.e.
105% of A, however, maximum 105%
of L1. During sea trial conditions the
maximum speed may be extended to
107% of A, see line 9.
Line 5:
Represents the maximum mean effec
tive pressure level (mep) which can be
accepted for continuous operation.
The above limits may, in general, be
extended to 105% and, during sea trial
conditions, to 107% of the nominal L1
speed of the engine, provided the tor
sional vibration conditions permit.
Line 7:
Represents the maximum power for
continuous operation.
The overspeed setpoint is 109% of
the speed in A, however, it may be
moved to 109% of the nominal speed
in L1, provided that torsional vibration
conditions permit.
Limits for overload operation
The overload service range is limited as
follows, see Fig. 18:
Running at low load above 100% of
the nominal L1 speed of the engine is,
however, to be avoided for extended
periods.
Line 8:
Represents the overload operation limi
tations.
Line 4:
Represents the limit at which an ample
air supply is available for combustion and
imposes a limitation on the maximum
combination of torque and speed.
M: Specified MCR of engine
S: Continuous service rating of engine
O: Optimising point of engine
A: Reference point of load diagram
Line 10:
Represents the mean effective pressure
(mep) lines. Line 5 is equal to the 100%
mepline. The meplines are also an
expression of the corresponding fuel
index of the engine.
The area between lines 4, 5, 7 and the
dashed line 8 in Fig. 18 is available for
overload running for limited periods
only (1 hour per 12 hours).
M: Specified MCR of engine
S: Continuous service rating of engine
O: Optimising point of engine
A: Reference point of load diagram
Power
7
A=M=MP
O
S=SP
2
7
5% A
3.3% A
5
4
Power
1 2 6
A=M
6
1
5
7
5% L1
O
S
Propulsion and
engine service curve
for heavy running
4
1
6
2
3
Engine speed
Point A of load diagram
Line 1: Propeller curve through optimising point (O)
Line 7: Constant power line through specified MCR (M)
Point A: Intersection between lines 1 and 7
Fig. 19a: Example 1 with FPP – engine layout without SG (normal case)
Propulsion and engine service
curve for heavy running
Engine speed
Fig. 19b: Example 1 with FPP – load diagram without SG (normal case)
23
The scavenge air pressure limiter
algorithm compares the calculated
fuel pump index and measured
scavenge air pressure with a refer
ence limiter curve giving the maxi
mum allowable fuel pump index at a
given scavenge air pressure. If the
calculated fuel pump index is above
this curve, the resulting fuel pump
index will be reduced correspondingly.
• Torque limiter
The purpose of the torque limiter is
to ensure that the limitation lines of
the load diagram are always observed.
The torque limiter algorithm compares
the calculated fuel pump index (fuel
amount) and the actually measured
engine speed with a reference limiter
curve giving the maximum allowable
fuel pump index at a given engine
speed. If the calculated fuel pump
index is above this curve, the result
ing fuel pump index will be reduced
correspondingly.
The reference limiter curve is to be
adjusted so that it corresponds to the
limitation lines of the load diagram.
• Scavenge air pressure limiter
The purpose of the scavenge air
ship and clean hull, the propeller/engine
may run along or close to the propeller
design curve 6.
pressure limiter is to ensure that the
engine is not being overfuelled during
acceleration, as for example during
manoeuvring.
Electronic governor with load limitation
In order to safeguard the diesel engine
against thermal and mechanical overload,
the approved electronic governors include
the following two limiter functions:
The reference limiter curve is to be
adjusted to ensure that sufficient air
will always be available for a good
combustion process.
Recommendation
Continuous operation without a time
limitation is allowed only within the area
limited by lines 4, 5, 7 and 3 of the
load diagram. For fixed pitch propeller
operation in calm weather with loaded
M: Specified MCR of engine
S: Continuous service rating of engine
O: Optimising point of engine
A: Reference point of load diagram
After some time in operation, the ship’s
hull and propeller will become fouled,
resulting in heavier running of the pro
peller, i.e. the propeller curve will move
to the left from line 6 towards line 2, and
extra power will be required for propulsion
in order to maintain the ship speed.
At calm weather conditions the extent
of heavy running of the propeller will
indicate the need for cleaning the hull
and, possibly, polishing the propeller.
The area between lines 4 and 1 is avail
able for operation in shallow water,
heavy weather and during acceleration,
i.e. for nonsteady operation without
any actual time limitation.
M: Specified MCR of engine
S: Continuous service rating of engine
O: Optimising point of engine
A: Reference point of load diagram
7
5% A
3.3% A
5
Power
4
A
O
1 2
Power
7
M=MP
S=SP
1 2 6
A
5
6
O
7
M
5% L1
S
Propulsion and
engine service curve
for heavy running
4
1 2
6
3
Engine speed
Point A of load diagram
Line 1: Propeller curve through optimising point (O)
Line 7: Constant power line through specified MCR (M)
Point A: Intersection between lines 1 and 7
Fig. 20a: Example 2 with FPP – engine layout without SG (special case)
24
Propulsion and engine service
curve for heavy running
Engine speed
Fig. 20b: Example 2 with FPP – load diagram without SG (special case)
The recommended use of a relatively
high light running factor for design of
the propeller will involve that a relatively
higher propeller speed will be used for
layout design of the propeller. This, in
turn, may involve a minor reduction of
the propeller efficiency, and may possi
bly cause the propeller manufacturer to
abstain from using a large light running
margin. However, this reduction of the
propeller efficiency caused by the large
light running factor is actually relatively
insignificant compared with the improved
engine performance obtained when
sailing in heavy weather and/or with
fouled hull and propeller.
In this respect the choice of the optimi
sing point O has a significant influence.
Examples with fixed pitch propeller
When the ship accelerates, the propel
ler will be subjected to an even larger
load than during free sailing. The same
applies when the ship is subjected to
an extra resistance as, for example,
when sailing against heavy wind and
sea with large wave resistance.
Example 1:
Normal running conditions, without
shaft generator
Normally, the optimising point O, and
thereby the engine layout curve 1, will
be selected on the engine service
curve 2 (for heavy running), as shown
in Fig. 19a.
Use of layout and load
diagrams examples
Point A is then found at the intersection
between propeller curve 1 (2) and the
constant power curve through M, line
7. In this case, point A will be equal to
point M.
In the following, four different examples
based on fixed pitch propeller (FPP)
and one example based on controllable
pitch propeller (CPP) are given in order
to illustrate the flexibility of the layout
and load diagrams.
Once point A has been found in the
layout diagram, the load diagram can
be drawn, as shown in Fig. 19b, and
hence the actual load limitation lines
of the diesel engine may be found.
M: Specified MCR of engine
S: Continuous service rating of engine
O: Optimising point of engine
A: Reference point of load diagram
Power
S
Example 2:
Special running conditions, without
shaft generator
In both cases, the engine’s operating
point will be to the left of the normal
operating curve, as the propeller will
run heavily.
In order to avoid exceeding the
lefthand limitation line 4 of the load
diagram, it may, in certain cases, be
necessary to limit the acceleration
and/or the propulsion power.
If the expected trade pattern of the
ship is to be in an area with frequently
appearing heavy wind and sea and
M: Specified MCR of engine
S: Continuous service rating of engine
O: Optimising point of engine
A: Reference point of load diagram
A=M 7
O SG
7
5
3.3% A
5% A
4
SG MP
Power
1 2 6
A=M
7
5
at
o
r
SP
er
en
tg
2
6
MP
Sh
af
1
5% L1
O
S
1
2
6
Sh
af
tg
en
4
Propulsion curve
for heavy running
er
at
or
SP
Engine service curve
for heavy running
3
Engine speed
Point A of load diagram
Line 1: Propeller curve through optimising point (O)
Line 7: Constant power line through specified MCR (M)
Point A: Intersection between lines 1 and 7
Fig. 21a: Example 3 with FPP – engine layout with SG (normal case)
Engine service curve
for heavy running
Propulsion curve
for heavy running
Engine speed
Fig. 21b: Example 3 with FPP – load diagram with SG (normal case)
25
large wave resistance, it can, therefore,
be an advantage to design/move the
load diagram more towards the left.
The latter can be done by moving the
engine’s optimising point O – and thus
the propeller curve 1 through the opti
mising point – towards the left. How
ever, this will be at the expense of a
slightly increased specific fuel oil con
sumption.
An example is shown in Figs. 20a and
20b. As will be seen in Fig. 20b, and
compared with the normal case shown
in Example 1 (Fig. 19b), the lefthand
limitation line 4 is moved to the left, giv
ing a wider margin between lines 2 and
4, i.e. a larger light running factor has
been used in this example.
Example 3:
Normal case, with shaft generator
In this example a shaft generator (SG)
is installed, and therefore the service
power of the engine also has to incor
porate the extra shaft power required
One solution could be to choose a
diesel engine with an extra cylinder,
but another and cheaper solution is to
reduce the electrical power production
of the shaft generator when running in
the upper propulsion power range.
for the shaft generator’s electrical
power production.
In Fig. 21a, the engine service curve
shown for heavy running incorporates
this extra power.
If choosing the latter solution, the re
quired specified MCR power of the en
gine can be reduced from point M’ to
point M as shown in Fig. 22a. Therefore,
when running in the upper propulsion
power range, a diesel generator has to
take over all or part of the electrical
power production.
The optimising point O, and thereby the
engine layout curve 1, will normally be
chosen on the propeller curve (~ en
gine service curve) through point M.
Point A is then found in the same way
as in example 1, and the load diagram
can be drawn as shown in Fig. 21b.
Example 4:
Special case, with shaft generator
Also in this special case, a shaft gener
ator is installed but, unlike in Example
3, now the specified MCR for propul
sion MP is placed at the top of the lay
out diagram, see Fig. 22a. This involves
that the intended specified MCR of the
engine (Point M’) will be placed outside
the top of the layout diagram.
M: Specified MCR of engine
S: Continuous service rating of engine
O: Optimising point of engine
A: Reference point of load diagram
M´
A
O=S
M
7
However, such a situation will seldom
occur, as ships rather infrequently op
erate in the upper propulsion power
range. In the example, the optimising
point O has been chosen equal to
point S, and line 1 may be found.
Point A, having the highest possible
power, is then found at the intersection
of line L1L3 with line 1, see Fig. 22a,
and the corresponding load diagram is
M: Specified MCR of engine
S: Continuous service rating of engine
O: Optimising point of engine
A: Reference point of load diagram
Power
SG
5% A
3.3% A
MP
7
SP
M´
5
A
4
en
2
Power
1 2 6
6
O=S
Sh
af
SP
7
M
MP
SG
tg
1
er
at
o
r
5
5% L1
Engine service curve
for heavy running
af
tg
6
Engine speed
Point A and M of load diagram
Line 1: Propeller curve through optimising point (O)
Point A: Intersection between line 1 and line L1 L3
Point M: Located on constant power line 7 through point A
and at MP’s speed
Fig. 22a: Example 4 with FPP – engine layout with SG (special case)
26
2
Sh
Propulsion curve for heavy running
1
en
4
er
at
or
3
Propulsion curve
for heavy running
Engine service curve
for heavy running
Engine speed
Fig. 22b: Example 4 with FPP – load diagram with SG (special case)
drawn in Fig. 22b. Point M is found on
line 7 at MP’s speed.
Example with controllable pitch propeller
Example 5:
With or without shaft generator
Layout diagram – without shaft generator
If a controllable pitch propeller (CPP)
is applied, the combinator curve (of
the propeller with optimum propeller
efficiency) will normally be selected for
loaded ship including sea margin.
For a given propeller speed, the com
binator curve may have a given propeller
pitch, and this means that, like for a fixed
pitch propeller, the propeller may be
heavy running in heavy weather.
Therefore, it is recommended to use a
light running combinator curve (the dotted
curve), as shown in Fig. 23, to obtain an
increased operating margin for the diesel
engine in heavy weather to the load limits
indicated by curves 4 and 5.
Layout diagram – with shaft generator
The hatched area in Fig. 23 shows the
recommended speed range between
100% and 96.7% of the specified MCR
speed for an engine with shaft generator
running at constant speed.
The service point S can be located at
any point within the hatched area.
The procedure shown in Examples 3
and 4 for engines with FPP can also be
M: Specified MCR of engine
S: Continuous service rating of engine
O: Optimising point of engine
A: Reference point of load diagram
5%A
5
4
1
A=M
7
5%L 1
O
S
4
1
3
Recommended range
for shaft generator
operation with
constant speed
Combinator curve
for loaded ship
and incl. sea margin
Min
speed
Load diagram
Therefore, when the engine’s specified
MCR point M has been chosen including
engine margin, sea margin and the
power for a shaft generator, if installed,
point M can be used as point A of the
load diagram, which can then be drawn.
The position of the combinator curve
ensures the maximum load range
within the permitted speed range for
engine operation, and it still leaves a
reasonable margin to the load limits
indicated by curves 4 and 5.
In order to give a brief summary regard
ing the influence on the fixed pitch
propeller running and main engine opera
tion of different types of ship resistance,
an arbitrary example has been chosen,
see the load diagram in Fig. 24.
7
5
The optimising point O for engines with
VIT can be chosen on the propeller curve
1 through point A = M with an optimised
power from 85 to 100% of the specified
MCR as mentioned before in the section
dealing with optimising point O.
Influence on engine running of
different types of ship resistance
– plant with FPpropeller
Power
3.3%A
applied for engines with CPP running
on a combinator curve.
Max
speed
Engine speed
Fig. 23: Example 5 with CPP – with or without shaft generator
The influence of the different types of
resistance is illustrated by means of
corresponding service points for propul
sion having the same propulsion power,
using as basis the propeller design
point PD, plus 15% extra power.
Propeller design point PD
The propeller will, as previously described,
normally be designed according to a
specified ship speed V valid for loaded
ship with clean hull and calm weather
conditions. The corresponding engine
speed and power combination is
shown as point PD on propeller curve
6 in the load diagram, Fig. 24.
Increased ship speed, point S0
If the engine power is increased by, for
example, 15%, and the loaded ship is
still operating with a clean hull and in
calm weather, point S0, the ship speed
27
V and engine speed n will increase in
accordance with the propeller law (more
or less valid for the normal speed range):
Point S0 will be placed on the same
propeller curve as point PD.
Sea running with clean hull and 15%
sea margin, point S2
Conversely, if still operating with loaded
ship and clean hull, but now with extra
V S 0 = V × 3 .5 115
. = 1041
.
×V
nS 0 = n × 3 .0 115
. = 1048
.
×n
PD: Propeller design point, clean hull and calm weather
Continuous service rating for propulsion with
a power equal to 90% specified MCR, based on:
S0:
Clean hull and calm weather, loaded ship
S1:
Clean hull and calm weather, ballast (trial)
S2:
Clean hull and 15% sea margin, loaded ship
SP:
Fouled hull and heavy weather, loaded ship
S3:
Very heavy sea and wave resistance
For a resistance corresponding to
about 30% extra power (30% sea mar
gin), the corresponding relative heavy
running factor will be about 1%.
100% ref. point (A)
Specified MCR (M)
105
A=M
100
7
5
95
S0
S1
S2
SP
90
85
S3
8
4
6
1
80
PD
2
3
9
75
6.3
6.2
6.1
70
80
85
90
As the ship speed VS2 = V, and if the
propeller had no slip, it would be expected
that the engine (propeller) speed would
also be constant. However, as the water
does yield, i.e. the propeller has a slip,
the engine speed will increase and the
running point S2 will be placed on a
propeller curve 6.2 very close to S0, on
propeller curve 6. Propeller curve 6.2
will possibly represent an approximate
0.5% heavier running propeller than
curve 6.
Depending on the ship type and size,
the heavy running factor of 0.5% may
be slightly higher or lower.
Engine shaft power % of A
110
resistance from heavy seas, an extra
power of, for example, 15% is needed
in order to maintain the ship speed V
(15% sea margin).
95
100
105
110
Engine speed, % of A
Line 1:
Propeller curve through point A=M, layout curve for engine
Line 2:
Heavy propeller curve, fouled hull and heavy weather, loaded ship
Line 6:
Light propeller curve, clean hull and calm weather,
loaded ship, layout curve for propeller
Sea running with fouled hull, and
heavy weather, point SP
When, after some time in service, the
ship’s hull has been fouled, and thus
becomes more rough, the wake field
will be different from that of a smooth
ship (clean hull).
A ship with a fouled hull will, conse
quently, be subject to an extra resis
tance which, due to the changed
wake field, will give rise to a heavier
running propeller than experienced
during bad weather conditions alone.
When also incorporating some aver
age influence of heavy weather, the
propeller curve for loaded ship will
move to the left, see propeller curve
2 in the load diagram in Fig. 24. This
propeller curve, denoted fouled hull
and heavy weather for a loaded ship,
is about 5% heavy running compared
to the clean hull and calm weather
propeller curve 6.
Line 6.1: Propeller curve, clean hull and calm weather, ballast (trial)
Line 6.2: Propeller curve, clean hull and 15% sea margin, loaded ship
Line 6.3: Propeller curve, very heavy sea and wave resistance
Fig. 24: Influence of different types of ship resistance on the continuous service rating
28
In order to maintain an ample air
supply for the diesel engine’s com
bustion, which imposes a limitation
on the maximum combination of
torque and speed, see curve 4 of the
load diagram, it is normal practice to
match the diesel engine and turbo
charger etc. according to a propeller
curve 1 of the load diagram, equal to
the heavy propeller curve 2.
Instead of point S2, therefore, point SP
will normally be used for the engine lay
out by referring this service propulsion
rating to, for example, 90% of the engine’s
specified MCR, which corresponds to
choosing a 10% engine margin.
In other words, in the example the pro
peller’s design curve is about 5% light
running compared with the propeller
curve used for layout of the main engine.
Running in very heavy seas with
heavy waves, point S3
When sailing in very heavy sea against,
with heavy waves, the propeller can be
78% heavier running (and even more)
than in calm weather, i.e. at the same
propeller power, the rate of revolution
may be 78% lower.
seldom loaded during sea trials and
more often is sailing in ballast, the ac
tual propeller curve 6.1 will be more
light running than curve 6.
For a power to the propeller equal to
90% specified MCR, point S1 on the
load diagram, in Fig. 24, indicates an
example of such a running condition. In
order to be able to demonstrate opera
tion at 100% power, if required, during
sea trial conditions, it may in some
cases be necessary to exceed the pro
peller speed restriction, line 3, which
during trial conditions may be allowed
to be extended to 107%, i.e. to line 9
of the load diagram.
Influence of ship resistance on
combinator curves – plant with
CPpropeller
This case is rather similar with the FP
propeller case described above, and
therefore only briefly described here.
The CPpropeller will normally operate
on a given combinator curve, i.e. for a
given propeller speed the propeller
pitch is given (not valid for constant
propeller speed). This means that
heavy running operation on a given
propeller speed will result in a higher
power operation, as shown in the ex
ample in Fig. 25.
S=PD Propeller design point incl. sea margins, and continuous service rating of engine
Line 1
Propeller curve for layout of engine
Line 1 Combinator curve for propeller design, clean hull and 15% sea margin, loaded ship
Line 6.1 Light combinator curve, fouled hull and calm weather, loaded ship
For a propeller power equal to 90% of
specified MCR, point S3 in the load
diagram in Fig. 24 shows an example
of such a running condition.
In some cases in practice with strong
wind against, the heavy running has
proved to be even greater and even to
be found to the left of the limitation line
4 of the load diagram.
In such situations, to avoid slamming of
the ship and thus damage to the stem
and racing of the propeller, the ship
speed will normally be reduced by the
navigating officers on watch.
Ship acceleration and operation in
shallow waters
When the ship accelerates and the
propeller is being subjected to a larger
load than during free sailing, the effect
on the propeller may be similar to that
illustrated by means of point S3 in the
load diagram, Fig. 24. In some cases in
practice, the influence of acceleration
on the heavy running has proved to be
even greater. The same conditions are
valid for running in shallow waters.
Sea running at trial conditions, point S1
Normally, the clean hull propeller curve
6 will be referred to as the trial trip pro
peller curve. However, as the ship is
Line 2
Heavy combinator curve, fouled hull and heavy weather, loaded ship
Line 2.1 Very heavy combinator curve, very heavy sea and wave resistance
Engine shaft power % of A
100% ref. point (A)
Specified MCR (M)
110
105
100
95
A=M
5
7
S=PD
90
85
80
8
4
1
75
3
6
70
65
60
6.1
2
2.1
55
50
65
70
75
80
85
90
95
100
105 110
Engine speed, % of A
Fig. 25: Influence of ship resistance on combinator curves for CPpropeller
29
Closing Remarks
References
In practice, the ship’s resistance will
frequently be checked against the results
obtained by testing a model of the ship
in a towing tank. The experimental tank
test measurements are also used for
optimising the propeller and hull design.
[1] Technical discussion with
Keld Kofoed Nielsen,
Burmeister & Wain Shipyard,
Copenhagen
When the ship’s necessary power re
quirement, including margins, and the
propeller’s speed (rate of revolution)
have been determined, the correct
main engine can then be selected, e.g.
with the help of MAN B&W Diesel’s
computerbased engine selection
programme.
In this connection the interaction between
ship and main engine is extremely im
portant, and the placing of the engine’s
load diagram, i.e. the choice of engine
layout in relation to the engine’s (ship’s)
operational curve, must be made care
fully in order to achieve the optimum
propulsion plant. In order to avoid over
loading of the main engine for excessive
running conditions, the installation of an
electronic governor with load control may
be useful.
If a main engine driven shaft generator –
producing electricity for the ship – is in
stalled, the interaction between ship and
main engine will be even more complex.
However, thanks to the flexibility of the
layout and load diagrams for the MAN
B&W engines, a suitable solution will
nearly always be readily at hand.
1
[2] Ship Resistance
H.E. Guldhammer and
Sv. Aa. Harvald, 1974
[3] Resistance and Propulsion of Ships,
Sv. Aa. Harvald, 1983
[4] Paint supplier “International
Coatings Ltd.”, 2003
[5] Fartygspropellrar och Fartygs Framdrift,
Jan Tornblad, KaMeWa Publication,
1985
Furthermore, we recommend:
[6] Prediction of Power of Ships
Sv. Aa. Harvald, 1977 and 1986
[7] Propulsion of SingleScrew Ships
Sv. Aa. Harvald & J.M. Hee, 1981
1
174
APÊNDICE D. SELECÇÃO DE MOTORES PROPULSORES
Apêndice
E
Derating para Reduzir Consumo de
Combustı́vel
175
176
APÊNDICE E. DERATING
Derating: a solution for
high fuel savings and lower emissions
Rudolf Wettstein1 & David Brown2
Wärtsilä Switzerland Ltd, Winterthur
Summary
This paper sets out ways to achieve worthwhile reductions in the fuel consumption of Wärtsilä low-speed engines
when designing newbuildings. The key approach is to use the flexibility offered by the full power/speed layout field to
select a better layout point at a derated power with a lower BSFC and also possibly a higher propeller efficiency.
Introduction
1
2
Rudolf Wettstein is Director, Marketing &
Application Development, Ship Power, Wärtsilä
Switzerland Ltd.
David Brown is Manager, Marketing Support,
Wärtsilä Switzerland Ltd.
Engine power, %R1
Higher propulsive
efficiency
R1
tt
or
qu
e
lin
e
100
Rx
80
0
-1 ∆BSFC
-2 g/kWh
-3
-4
-5
on
st
an
90
C
Fuel efficiency and environmental friendliness are
high on the list of requirements for ship propulsion
engines from today’s shipping- and shipbuilding
industries. Thus Wärtsilä is committed to creating
better technology in these areas that will benefit both
the customers and the environment.
Yet it is often forgotten by many ship designers
and those specifying low-speed main engines that
advantage can be taken of the power/speed layout
field of Wärtsilä low-speed engines to select an engine
rating point with a still lower fuel consumption.
The concept of the power/speed layout field for
low-speed marine diesel engines originated in the
1970s. The layout options were step-by-step widened
until, in 1984, our low-speed engines began to be
offered with a broad power/speed layout field. An
engine’s contracted maximum continuous rating
(CMCR) can be selected at any point in the power/
speed field defined by the four corner points: R1,
R2, R3 and R4 (Fig. 1). The rating point R1 is the
maximum continuous rating (MCR) of the engine.
Most recently, the layout fields for certain
engines, the RT-flex82C, RTA82C, RT-flex82T and
RTA82T, are extended to increased speeds for the
R1+ and R2+ points (Fig. 2). The extended fields
offer widened flexibility to select the most efficient
propeller speed for lowest daily fuel consumption,
and the most economic propulsion equipment,
-6
R3
-7
70
60
70
R2
R4
80
90
Lower
specific
fuel
consumption
100
Engine speed, %R1
Fig. 1: Typical layout field for RTA and RT-flex engines. The
contracted maximum continuous rating (CMCR) can be
selected at any point, such as Rx, within the layout field. The
∆BSFC is the reduction in full-load BSFC for any rating
point Rx relative to that at the R1 rating.
[08#044]
namely the propeller, shafting, etc.
One basic principle of the engine layout field is
that the same maximum cylinder pressure (Pmax)
is employed at all CMCR points within the layout
field. Thus the reduced brake mean effective pressure
(BMEP) obtained at the reduced power outputs in
the field results in an increased ratio of Pmax/BMEP
and thus lower brake specific fuel consumption
(BSFC).
The other principle behind the layout field is
—1—
© Wärtsilä Corporation, June 2008
Engine power, %R1
Engine power, %R1
R1
100
R1
100
R1+
90
90
80
Rx2
Rx1
R3
80
70
R4
R2
80
Rating line
slope = α
R3
R2
R4
R2+
90
100
60
70
Engine speed, %R1
80
90
100
Engine speed, %R1
Fig. 2: For the RT-flex82C, RTA82C, RT-flex82T and
RTA82T engines the layout fields are extended to the ratings
R1+ and R2+ at the same powers as R1 and R2 respectively
but with increased shaft speed.
[08#049]
Fig. 3: For a given ship, a rating line (slope α) can be applied
to the layout field so that all rating points on that line would
give the same ship speed with a suitably optimized propeller.
Rating points at lower speeds on the rating line require
a larger propeller diameter and give a greater propulsive
efficiency.
that the lower CMCR speeds allow flexibility in
selection of the optimum propeller with consequent
benefits in propulsion efficiency and thus lower fuel
consumption in terms of tonnes per day.
One feature to be borne in mind when selecting
the rating point for the derated engine is the rating
line (Fig. 3). This is the line through a CMCR rating
point such that any point on the line represents
a new power/speed combination that will give
the same ship speed in knots. The points on the
rating line all require the same propeller type but
with different adaptations to suit the power/speed
combination. In general, lower speeds of rotation
require larger propeller diameters and thereby
increase the total propulsive efficiency. Usually the
selected propeller speed depends on the maximum
permissible propeller diameter. The maximum
diameter is often determined by operational
requirements, such as design draught and ballast
draught limitations, as well as class recommendations
concerning propeller–hull clearance (pressure
impulse induced by the propeller on the hull).
The slope of the rating line (α) depends broadly
upon the ship type. It can range from 0.15 for
tankers, bulk carriers and general cargo ships up to
about 10,000 tdw to 0.22 for container ships larger
than 3000 TEU and 0.25 for tankers and bulk
carriers larger than 30,000 tdw.
Fig. 4: Since the 1980s engine ratings have been selected over
a steadily smaller area of the layout field.
[08#051]
Engine power, %R1
100
R1
Area of recent
CMCR selection
90
80
70
60
70
R3
Area of CMCR
selection in
the 1980s
R2
R4
80
90
100
Engine speed, %R1
Changing engine selection strategies
When the broad layout field was introduced in
RTA engines in 1984 it was widely welcomed by
shipowners and shipbuilders. Afterwards RTA
engines were frequently selected at ratings in the
lower part of the layout field to gain the benefits of
—2—
© Wärtsilä Corporation, June 2008
Bunker price, US$/tonne
380cSt HFO
500
400
300
200
100
2004
2005
2006
2007
2008
Fig. 5: Bunker prices have considerably increased in recent times. The chart shows the average price of 380 cSt heavy fuel oil (HFO)
from various ports around the world from 2004 to 2008. The green bars indicate the mean price for each year.
[08#045]
lower fuel consumption.
However, under the pressure of first costs and
softening bunker prices the strategy was changed and
the selected power/speed combination has, during
the past 15 years or so, been selected to be closer to
the R1 rating (Fig. 4).
Yet, more recently, bunker prices have steadily
climbed, rising by some 85 per cent in the course of
2007 from US$ 270 to US$ 500 per tonne (Fig. 5).
The result is that bunkers are now the dominant part
of ship operating costs.
Such drastic increases in bunker prices give a
strong impetus to reduce fuel costs. They can also
justify additional investment cost such as selecting
an engine with an extra cylinder. The consequent
fuel saving may make for an acceptable payback time
on the additional investment cost. It would justify
any efforts to increase the overall efficiency of the
complete propulsion system.
Further impetus to implementing such changes
in engine selection strategy will come from a future
need to cut CO2 emissions. If a carbon trading
scheme is imposed on shipping it would give further
economic advantage to reducing fuel consumption
and further help to pay for any necessary extra
investment costs.
In addition it is important to bear in mind that
the fuel savings measures discussed here will also
result in lower NOX emissions in absolute terms.
Derating engines for greater fuel savings
In the following pages are some case studies for ship
installations for which an engine is selected with an
extra cylinder without increasing the engine’s power.
These cases demonstrate that such engine derating
can be an advantageous solution with remarkable
saving potential. Depending on bunker costs, such a
strategy can have a very attractive pay-back time.
The four case studies are for a Suezmax tanker,
a Capesize bulk carrier, a Panamax container ship
and a Post-Panamax container ship. They include
estimations of the respective pay-back times for the
additional engine costs.
—3—
© Wärtsilä Corporation, June 2008
Case 1: Suezmax tanker & Capesize bulk carrier
In this case, a typical Suezmax tanker might be
specified with a six-cylinder Wärtsilä RT-flex68-D
main engine. However, if a seven-cylinder engine is
employed instead, the daily fuel consumption can be
reduced by some 3.4 per cent.
In the engine/propeller layout for this ship as
shown in figure 6, the CMCR points for the two
alternative engines are on the same rating line
(α = 0.3) through a common design point for the
same ship service speed (knots).
The calculation of annual fuel costs given in table
2 is based on 6000 hours running with heavy fuel oil
costing US$ 500 per tonne.
The resulting payback time for the extra cost
associated with the additional engine cylinder is
estimated to be between 3.5 and six years depending
on the bunker price of US$ 600–400 per tonne
respectively (Fig. 7). The calculations of the payback
are based on an interest rate of eight per cent.
A similar case may be made for a Capesize bulk
carrier as it would be similar in size and speed to a
Suezmax tanker and would thus require a similar
engine.
Table 1: Typical ship parameters for a Suezmax tanker
Length overall:
Beam:
Design draught:
Scantling draught:
Sea margin:
Engine service load:
about 274
46–50
16
17
15
90
m
m
m
m
%
%
Table 2: Main engine options
Alternative engines:
Cylinder bore, mm:
Piston stroke, mm:
Stroke/bore ratio:
MCR, kW / rpm:
CMCR, kW / rpm:
BMEP at CMCR, bar:
CSR at 90% CMCR, kW/rpm:
BSFC at CMCR, g/kWh:
– 100% load:
– 90% load:
Daily fuel consumption, tonnes/day:
– ISO fuel, LCV 42.7 MJ/kg:
– LCV 40.5 MJ/kg:
– As percentage, %:
Annual fuel costs, US$:
Fuel saving, US$:
Engine length, mm:
Engine mass, tonnes:
6RT-flex68-D
680
2720
4:1
18,780/95
18,780/95
20.0
16,902/91.7
7RT-flex68-D
680
2720
4:1
21,910/95
18,460/89.7
17.9
16,614/86.6
169.0
165.6
164.8
162.6
67.2
70.8
100
8,853,000
0
64.8
68.4
96.6
8,544,000
– 309,000
8690
472
9870
533
—4—
–3.4%
© Wärtsilä Corporation, June 2008
Case 1: Suezmax tanker & Capesize bulk carrier
Engine power, kW
22,000
7RT-flex68-D
20,000
Constant ship speed
α = 0.3
Fig. 6: Engine/propeller layouts for
a typical Suezmax tanker with a
derated seven-cylinder RT-flex68-D
engine compared with a six-cylinder
engine at the full MCR power and
speed.
[08#052]
CMCR
18,460 kW
89.7 rpm
Design point
CMCR = R1
18,780 kW, 95 rpm
6RT-flex68-D
18,000
CSR
16,902 kW
91.7 rpm
CSR
16,614 kW
86.6 rpm
16,000
75
80
85
90
95
100
Engine speed, rpm
Millions US$
Bunker price, HFO:
$600/tonne
$500/tonne
3.0
$400/tonne
2.0
Fig. 7: Variation of payback times
from fuel savings according to
bunker costs for the derated engine
with an extra cylinder for a typical
Suezmax tanker.
[08#144]
Investment approx. ($)
1.0
0
2
4
—5—
6
8
10
12
14
Years
© Wärtsilä Corporation, June 2008
Case 2: Panamax container ship
In this case, a typical Panamax container ship with
a container capacity of up to 5000 TEU might be
specified with an eight-cylinder Wärtsilä RT-flex82C
main engine. However, if a nine-cylinder engine is
employed instead, the daily fuel consumption can be
reduced by some two per cent.
In the engine/propeller layout for this ship as
shown in figure 8, the CMCR points for the two
alternative engines are on the same rating line
(α = 0.2) through a common design point for the
same ship service speed (knots).
The calculation of annual fuel costs given in table
4 is based on 6000 hours running with heavy fuel oil
costing US$ 500 per tonne.
The resulting payback time for the extra cost
associated with the additional engine cylinder
is estimated to be between four and seven years
depending on the bunker price of US$ 600–400 per
tonne respectively (Fig. 9). The calculations of the
payback are based on an interest rate of eight per
cent.
Table 3: Typical ship parameters for a Panamax
container ship
Length overall:
Beam:
Design draught:
Scantling draught:
Sea margin:
Engine service load:
about 295
32.2
12
13.5
15
90
m
m
m
m
%
%
Table 4: Main engine options
Alternative engines:
Cylinder bore, mm:
Piston stroke, mm:
Stroke/bore ratio:
MCR, kW / rpm:
CMCR, kW / rpm:
BMEP at CMCR, bar:
CSR at 90% CMCR, kW / rpm:
BSFC at CMCR, g/kWh:
– 100% load:
– 90% load:
Daily fuel consumption, tonnes/day:
– ISO fuel, LCV 42.7 MJ/kg:
– LCV 40.5 MJ/kg:
– As percentage, %:
Annual fuel costs, US$:
Fuel saving, US$:
Engine length, mm:
Engine mass, tonnes:
8RT-flex82C
820
2646
3.2:1
36,160/102
36,160/102
19.0
32,544/98.5
9RT-flex82C
820
2646
3.2:1
40,680/102
35,480/97.5
17.5
32,250/94.3
169.0
166.5
166.6
164.6
130.0
137.1
100
17,138,000
0
14,055
1020
—6—
127.4
134.3
98 – 2.0%
16,790,000
– 348,000
16,500
1140
© Wärtsilä Corporation, June 2008
Case 2: Panamax container ship
Engine power, kW
42,000
40,000
9RT-flex82C
38,000
Fig. 8: Engine/propeller layouts for a
typical Panamax container ship with
a derated nine-cylinder RT-flex82C
engine compared with an eightcylinder engine at the full MCR
power and speed.
[08#062]
CMCR
35,850 kW
97.5 rpm
Constant ship speed
α = 0.2
36,000
Design point
CMCR = R1+
36,160 kW, 102 rpm
8RT-flex82C
34,000
CSR
32,544 kW
98.5 rpm
CSR
32,250 kW
94.3 rpm
32,000
85
90
95
100
105
Engine speed, rpm
Millions US$
4.0
Bunker price, HFO:
$600/tonne
3.0
$500/tonne
$400/tonne
Fig. 9: Variation of payback times
from fuel savings according to
bunker costs for the derated engine
with an extra cylinder for a typical
Panamax container ship.
[08#145]
2.0
Investment approx. ($)
1.0
0
2
4
—7—
6
8
10
12
14
Years
© Wärtsilä Corporation, June 2008
Case 3: Post-Panamax container ship
In this case, a typical Post-Panamax container
ship with a container capacity of around 7000
TEU might be specified with an eleven-cylinder
Wärtsilä RT-flex96C main engine. However, if a
12-cylinder engine is employed instead, the daily fuel
consumption can be reduced by some 2.4 per cent.
In the engine/propeller layout for this ship as
shown in figure 10, the CMCR points for the two
alternative engines are on the same rating line
(α = 0.2) through a common design point for the
same ship service speed (knots).
The calculation of annual fuel costs given in table
6 is based on 6000 hours running with heavy fuel oil
costing US$ 500 per tonne.
The resulting payback time for the extra cost
associated with the additional engine cylinder is
estimated to be between two-and-a-half and four
years depending on the bunker price of US$ 600–
400 per tonne respectively (Fig. 11). The calculations
of the payback are based on an interest rate of eight
per cent.
Table 5: Typical ship parameters for a Post-Panamax
container ship
Length overall:
Beam:
Design draught:
Scantling draught:
Sea margin:
Engine service load:
about 325
42.8
13
14.5
15
90
m
m
m
m
%
%
Table 6: Main engine options
Alternative engines:
Cylinder bore, mm:
Piston stroke, mm:
Stroke/bore ratio:
MCR, kW / rpm:
CMCR, kW / rpm:
BMEP at CMCR, bar:
CSR at 90% CMCR, kW / rpm:
BSFC at CMCR, g/kWh:
– 100% load:
– 90% load:
Daily fuel consumption, tonnes/day:
– ISO fuel, LCV 42.7 MJ/kg:
– LCV 40.5 MJ/kg:
– As percentage, %:
Annual fuel costs, US$:
Fuel saving, US$:
Engine length, mm:
Engine mass, tonnes:
11RT-flex96C
960
2500
2.6:1
66,330/102
66,330/102
19.6
59,697/98.5
12RT-flex96C
960
2500
2.6:1
72,360/102
65,919/98.9
18.4
59,327/95.5
171.0
166.8
168.0
163.8
239
252
100
31,500,000
0
21,550
1910
—8—
233.2
245.9
97.6 – 2.4%
30,738,000
– 762,000
23,230
2050
© Wärtsilä Corporation, June 2008
Case 3: Post-Panamax container ship
Engine power, kW
72,000
12RT-flex96C
70,000
68,000
66,000
Fig. 10: Engine/propeller layouts for
a typical Post-Panamax container
ship with a derated 12-cylinder RTflex96C engine compared with an
11-cylinder engine at the full MCR
power and speed.
[08#127]
Design point
CMCR = R1
66,330 kW, 102 rpm
CMCR
65,919 kW
98.9 rpm
Constant ship speed
α = 0.2
11RT-flex96C
64,000
62,000
60,000
CSR
59,327 kW
95.5 rpm
CSR
59,697 kW
98.5 rpm
58,000
90
95
100
105
Engine speed, rpm
Millions US$
Bunker price, HFO:
$600/tonne
8.0
$500/tonne
6.0
Fig. 11: Variation of payback times
from fuel savings according to
bunker costs for the derated engine
with an extra cylinder for the typical
Post-Panamax container ship.
[08#146]
$400/tonne
4.0
Investment approx. ($)
2.0
0
2
4
—9—
6
8
10
12
14
Years
© Wärtsilä Corporation, June 2008
Case 4: Derating without adding an
engine cylinder
a modest increase in cost of the D version for the
higher-efficiency turbochargers used, but the extra
cost would soon be repaid by the fuel cost savings.
It is also feasible to apply a derated engine to obtain
fuel savings in such a way that an additional engine
cylinder is not required.
An example of this can be seen with the Wärtsilä
RT-flex50 engine. In October 2007, the D version
of this engine was announced, in which the engine
power was increased by 5.1 per cent and the BSFC
at full-load was reduced by 2 g/kWh compared with
the B version.
Thus if a ‘-D’ engine is derated to the same
cylinder power output as the original version of the
RT-flex50, then the BSFC at full load is reduced
by 4.5 g/kWh, or 2.7 per cent (see Table 7). For a
typical bulk carrier with a six-cylinder RT-flex50
engine this can translate into annual savings of
US$ 124,000 when operating for 6000 running
hours a year with heavy fuel oil costing US$ 500
per tonne. Even greater savings are possible if the
engine is derated to a lower running speed (rpm)
at the derated power to gain the benefits of a better
propulsion efficiency.
There are already a number of standard ship
designs delivered and on order with RT-flex50-B or
even the original RT-flex50 engine. So it would be
perfectly feasible to install a derated RT-flex50-D
in further newbuildings to the same ship designs
and obtain the benefit of the substantial savings in
operating costs. The overall dimensions of the D
version are identical to those of the B and original
versions of the RT-flex50. There would, however, be
Derating with flexibility to full rating
Although derating offers attractive economics, it
can be frustrating to buy more ‘engine’ than seems
necessary. Yet there is an interesting option to retain
an ability to utilise the full available installed engine
power, even up to the full R1 rating for future use to
obtain higher ship service speeds.
The concept would be to set up the engine for
the derated output at the chosen reduced service
speed. Then for a later date, the engine could be
re-adapted to the higher output. However, this needs
corresponding provisions in the selection and design
of the propeller, shafting and ancillary equipment to
meet the requirements of the envisaged higher power.
Furthermore the engine would need to be tested
and approved by the Classification Society for both
ratings with all the necessary emissions certification.
RT-flex technology as an important
contribution to fuel saving
Wärtsilä RT-flex technology plays an important role
in fuel saving. Wärtsilä RT-flex low-speed engines
incorporate the latest electronically-controlled
common-rail technology for fuel injection and valve
actuation. The result is great flexibility in engine
setting, bringing benefits in lower fuel consumption,
lower minimum running speeds, smokeless operation
Table 7: Options for the Wärtsilä RT-flex50 engine type
Alternative engines:
Cylinder bore, mm:
Piston stroke, mm:
S/B ratio:
MCR, kW / rpm:
CMCR, kW / rpm:
BMEP at CMCR, bar:
CSR at 90% CMCR, kW / rpm:
BSFC at CMCR, g/kWh:
– 100% load:
– 90% load:
Daily fuel consumption, tonnes/day:
– ISO fuel, LCV 42.7 MJ/kg:
– LCV 40.5 MJ/kg:
– As percentage, %:
Annual fuel costs, US$:
Fuel saving, US$:
6RT-flex50
500
2050
4.1:1
9720/124
9720/124
19.5
8748/119.7
6RT-flex50-D
500
2050
4.1:1
10,470/124
9720/124
19.5
8748/119.7
171
167.6
165.7
163.0
35.2
37.1
100
4,637,000
0
— 10 —
34.2
36.2
97.3 – 2.7%
4,513,000
– 124,000
© Wärtsilä Corporation, June 2008
at all running speeds, and better control of other
exhaust emissions.
Not only do RT-flex engines have a lower partload fuel consumption than RTA engines but they
can be adapted through Delta Tuning so that their
part-load fuel consumtion is even lower. [1]
Owing to the interaction between fuel economy
and NOX emissions, there is always the possibility
that fuel saving measures will have an impact on
NOX emissions. As with all new marine engines
nowadays, Wärtsilä RTA and RT-flex engines are all
fully compliant with the NOX emission regulation of
Annexe VI of the MARPOL 1973/78 convention.
Moreover, the engines in the Wärtsilä portfolio will
be adapted to meet the coming IMO NOX reduction
level Tier II.
also possibly a higher propeller efficiency.
It must also not be forgotten that any fuel savings
achieved at the ship design stage will have benefits in
also reducing exhaust emissions.
If you have a project for which you wish to
explore the fuel-saving possibilities through derating
as set out in this paper, then please contact your
nearest Wärtsilä office. Our experts will be delighted
to calculate various alternatives for your evaluation.
References
1. German Weisser, ‘Fuel saving with RT-flex’,
Wärtsilä Switzerland Ltd, July 2004.
Conclusion
The paper shows that there are techniques to achieve
worthwhile reductions in the fuel consumption
of Wärtsilä low-speed engines when designing
newbuildings. The key approach is to use the
flexibility offered by the full power/speed layout field
to select a better layout point with a lower BSFC and
Published June 2008 by:
Wärtsilä Switzerland Ltd
PO Box 414
CH-8401 Winterthur
Tel: +41 52 262 49 22
Fax: +41 52 262 07 18
www.wartsila.com
— 11 —
© Wärtsilä Corporation, June 2008
Baixar