Máquinas Eléctricas
Motores assíncronos
Motores de indução
Arranque
O motor respeitante à Figura 1.1 é pequeno e
arranca em vazio (inércia de carga nula). Devido à baixa
inércia, todas as magnitudes variam fortemente durante o
arranque, já que o binário electromagnético gerado é
função da posição angular entre rotor e estator, em cada
momento (para motores de maior potência, arrancando
em carga tais variações surgem mais diluídas).
corrente
São motores robustos e baratos (fabricados em massa), embora tendo o inconveniente de não
serem reguláveis. Consequentemente, uma vez definido um binário e uma corrente, estes apenas
dependem de:
• Tensão de alimentação (cte)
• Velocidade em qualquer momento
tempo
velocidade
binário
A intensidade de corrente (para uma fase – as
restantes sendo iguais), ascende a uma valor elevado
(várias vezes superior à nominal) e oscila à frequência da
rede. Além disso, esta corrente tarda a baixar para valores
próximos da corrente nominal do motor e a sua
magnitude inicial é independente do binário resistente
que a carga opõe durante a aceleração.
Também o binário motor adquire, inicialmente,
valores não tão altos, sobretudo considerando que é
produzido por correntes elevadas. Além disso, nos
tempo
primeiros instantes do arranque, é um binário oscilante,
pelo que, ao motor, “custa-lhe adquirir velocidade”.
Apenas depois de 40% do tempo de arranque, existe uma
zona de binário positivo, que é o que realmente acelera o
motor. Na fase final do arranque, o binário motor volta a
adquirir um carácter oscilante, rapidamente amortecido,
que converge para o seu valor final ou nominal (nulo
neste caso, dado ser um arranque em vazio).
Consequência lógica do binário motor é a evolução
da velocidade. Na primeira fase surgem oscilações
tempo
relativamente
importantes,
apenas
aumentando
significativamente a velocidade, quando o binário motor tem um valor médio positivo. Passada esta
fase, a velocidade sofre ainda oscilações, menores e mais amortecidas.
Voltando às elevadas correntes, em causa no arranque, estas são as absorvidas nas bobines do
estator. Embora não sendo possível medi-las em motores de gaiola de esquilo, as correntes induzidas
nas bobines do rotor são também muito elevadas (equivalência com transformador – relação de
transformação). Estas corrente elevadas, quer no rotor quer no estator, conjugadas com arranque de
duração prolongada, têm as seguintes consequências:
ý Quedas de tensão nos transformadores/rede de alimentação (inadmissíveis para aparelhos de
outros utilizadores, ligados às mesmas fontes)
1/11
Máquinas Eléctricas
Motores assíncronos
ý Perdas de Joule elevadas ( RI2 ), tanto no rotor como no estator. Estas potências têm
muita dificuldade em dissipar-se durante o arranque – dada a sua curta duração –
acumulando-se maioritariamente nas próprias bobines , provocando importantes
aumentos de temperatura que podem conduzir a:
o Falhas prematuras do motor, por se ter ultrapassado a temperatura relativa à classe
de isolamento
o Não acontecendo a anterior, haverá lugar a um encurtamento da vida útil do motor
(envelhecimento)
∴
Existe a necessidade de limitar o número de arranques.
Grandezas físicas relacionadas com o funcionamento dos motores
Considerando um motor accionando uma carga rigidamente
acoplada – figura 1.2 – aplica-se a equação que expressa a 2ª lei de
Newton:
A soma dos binários actuando sobre um volante, é igual à
variação da quantidade de movimento angular do mesmo, durante
o tempo de aplicação dos binários
T
motor
−T
c arg a
origem
=
d ( J ⋅ ω)
dt
ângulo girado
J
Tmot
A equação pode ser desenvolvida,
M
C
Tcarg
ω
T = binário [N.m]
J = Inércia das massas do rotor [kg.m2]
ω = velocidade angular [rad.s-1]
T −T = J
Figura 1.2
Figura 1.3
Modelo simplificado
dω
dJ
+ω
dt
dt
Como na maior parte dos casos de accionamento a inércia é constante1 , podemos dizer dJ
=0
que , ficando a equação neste caso,
dt
T −T = J
M
C
dω
dt
1
Para os casos em que não podemos considerar cargas com inércia constante – robôs, accionadores, centrifugadoras,
enroladores de cabos, bobinadoras, etc. – haverá que conhecer a lei temporal que rege a variação de inércia [J = f (t)] e
aplicar a lei geral.
2/11
Máquinas Eléctricas
Motores assíncronos
As restantes grandezas são, essencialmente, variáveis, dependendo de:
TM = f (ω, ε, t).
TC = f ’(ω, ε, t)
ε = espaço angular percorrido [rad]
Existem, no entanto, bastantes casos particulares, tanto para o binário motor como para o binário
resistente, nos quais a dependência é apenas da velocidade,
TM = f (ω).
TC = f ’(ω)2
As equações apresentadas anteriormente, não descrevem completamente o movimento.
Necessitamos agora de equações provenientes da cinemática:
ω=
dε
dt
e
α=
dω d 2ε
= 2
dt
dt
em que α = aceleração angular [rad.s-2]
que também se podem expressar na sua forma integral:
ω = ∫ α ⋅ dt
e
ε = ∫ ω ⋅ dt
Na integração destas equações, haverá que considerar os valores iniciais:
a) Movimento uniforme
α=0
ω = cte
ε = ε0 + ω t
b) Movimento uniformemente acelerado
α = cte
ω = ω0 + α t
ε = ε 0 + ω0 t + ½ α t2
ω2 = ω0 2 + 2 α ε
Geração do binário motor
O binário motor gera-se electromagnéticamente pela interacção do fluxo no entreferro com a
corrente rotórica:
T = 2 ⋅ L ⋅ I ⋅ [i (t ) ⋅ (i (t ) ⋅ e ( ) )]
3
jε t
M
M
M
1
2
Existem alguns casos de máquinas accionadas, cujo binário resistente é dado por TC = f ’(ω, ε), tais como máquinas com
êmbolos e pistons (compressores p. ex.), cujo binário é função da posição angular do rotor.
2
3/11
Máquinas Eléctricas
Motores assíncronos
Pode condensar-se esta equação, dizendo que o binário motor responde a uma expressão do tipo:
T = f (ω ,ε , t )
M
Nos casos normalmente encontrados na prática, as componentes que dependem do tempo
desvanecem-se poucos períodos após a ligação do motor, podendo eliminar-se a dependência da
variável tempo. Algo semelhante acontece com a influência do ângulo de posição (ε). Para além disso,
o aumento de velocidade está, como se verá à frente, condicionado pela inércia total (J) a acelerar.
Referindo-nos à figura 1.1, constatamos que o que importa nos arranques é o valor médio da curva de
binário em função do tempo, isto é, o integral desta função. Este integral é positivo e crescente com o
tempo e, portanto, o motor arranca apesar das oscilações de velocidade nos primeiros instantes.
Assim, para aplicações normais, o binário motor depende da velocidade angular,
TM = f (ω)
obtendo-se o seu valor através das curvas fornecidas pelos fabricantes, ou calculando-o –
conhecidas as características das resistências e reactâncias do motor – através do circuito equivalente.
Evolução da corrente estatórica e rotórica
É sabido que, em regime estaccionário,
I1 + I2 = Im
I1 = corrente estatórica
I2 = corrente rotórica
Im = corrente de magnetização
A corrente I2 é a que origina o binário, de forma que, para binários nulos esta corrente é nula.
A corrente Im está condicionada pelo estado magnético do motor e depende das seguintes
variáveis:
§ Tensão aplicada – cresce com a tensão
§ Dimensionamento do motor (projecto):
o
o
o
Superior para motores lentos
Cresce com o entreferro
Cresce com circuitos magnéticos de baixa qualidade
Para um dado motor, alimentado com tensão constante, esta corrente permanece praticamente
constante, em regime estacionário, oscilando o seu valor entre 10 a 15 % de IN para motores grandes,
rápidos e com bom projecto e entre 50 a 60% de IN para motores pequenos, lentos com fraco projecto.
Para motores parados o escorregamento é s = 1. À medida que o motor acelera, o escorregamento
diminui até valores de s = 0,01 a 0,05. Quer isto dizer, que a resistência rotórica aparente (R2 /s) varia
muito, desde valores baixos (no início do arranque) até valores que podem ser entre 100 a 20 vezes
superiores ao valor inicial (motor no ponto de funcionamento nominal). Assim, o ramo rotórico passa
de:
i.
Uma situação de arranque com s = 1 e baixa resistência, que faz com que este ramo seja
muito reactivo e absorva correntes elevadas e muito desfasadas da tensão aplicada.
4/11
Máquinas Eléctricas
ii.
Motores assíncronos
Uma situação de funcionamento normal, com s = 0,01 a 0,05 e alta resistência que faz
com que este ramo seja muito resistivo e absorva correntes reduzidas com baixo
desfasamento.
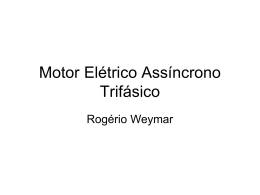
Em regime de arranque, com baixo fluxo, a corrente Im é muito reduzida, pelo que a corrente
estatórica I1 segue uma evolução muito similar à corrente rotórica
6
5
x IN
4
3
2
1
1
0,75
0,5
0,25
0
Figura 1.4
Como se pode constatar do gráfico da figura 1.4, as correntes são muito elevadas na maior parte
do tempo, gerando-se, em consequência, perdas de Joule elevadas. Torna-se, desta forma, necessário
que o motor arranque rápidamente, para minorar o aquecimento das bobines do motor. No entanto,
este comportamento do motor no arranque proporciona, paralelamente, altos valores de binário à custa
das altas correntes absorvidas.
Motores
Existem 2 tipos de motores de indução (ou assíncronos):
þ Rotor bobinado
Necessitam de equipamento de arranque ou de controle sobre o circuito rotórico –
resistências trifásicas ligadas electricamente ao rotor por meio de escovas e segmentos3 .
Quando o motor atinge a velocidade nominal estas resistências são curto circuitadas. Este
tipo de motor é mais delicado e mais caro, para a mesma potência/velocidade.
segmentos
Figura 1.6 - Rotor bobinado
3
Este tipo de motores, por utilizarem escovas e segmentos (faíscamento) impõem precauções adicionais quando utilizados
em atmosferas húmidas, poeirentas ou explosivas.
5/11
Máquinas Eléctricas
Motores assíncronos
þ Rotor em curto circuito (ou “gaiola de esquilo”)
Este tipo de motor, quando mal aplicados, dão origem a avarias mais fortes.
Figura 1.5 - Rotor “gaiola esquilo”
Características principais dos motores de indução
I. Potência nominal
[KW]
Potência disponível no eixo do motor (potência mecânica), sem que seja ultrapassado o
aquecimento especificado para o motor.
II. Tensão de alimentação e frequência
[V] e [Hz]
Tensão e frequência de alimentação, para as quais o motor fornece a potência e velocidade
nominais. No caso do rotor bobinado, é especificada ainda a tensão rotórica.
III. Velocidade
a. de sincronismo
velocidade do campo girante
2π
120
ω =
⋅ n [rad / s ]
n =
⋅ f [rpm]
60
2p
b. nominal
velocidade real, ligeiramente inferior à velocidade de sincronismo
0
0
ω=
0
2π
⋅ n [rad / s ]
60
IV. Intensidade de corrente estatórica
Corrente absorvida pelas bobines do estator. Pontos de interesse: corrente em vazio (s = 0),
corrente nominal e corrente de arranque (s = 1)
V. Binário
Força fornecida pelo motor. Pontos de interesse: binário nominal, binário máximo, binário
mínimo e binário de arranque (s = 1)
VI. Factor de potência
Relação entre a potência activa e a aparente. O seu melhor valor encontra-se para a potência
nominal. Os piores valores (de 0,1 a 0,4) encontram-se para s = 0 e para s = 1.
VII. Rendimento
Relação entre a potência mecânica útil (no eixo) e a potência eléctrica absorvida da
alimentação. Varia com a carga e alcança o seu valor máximo nas proximidades do ponto
nominal
6/11
Máquinas Eléctricas
Motores assíncronos
VIII. Escorregamento
Diferença entre a velocidade mecânica e a velocidade de sincronismo (ou do campo girante).
Para haver binário é necessário que o escorregamento seja diferente de zero.
s=
n0 − n ω0 − ω
=
n0
ω0
O escorregamento em motores pequenos (p. ex. 1,1 kW) tem valores importantes, na ordem
dos 7 a 8%, ao passo que em motores de elevada potência (p. ex. 800 kW) anda na ordem do
0,3 a 0,5%
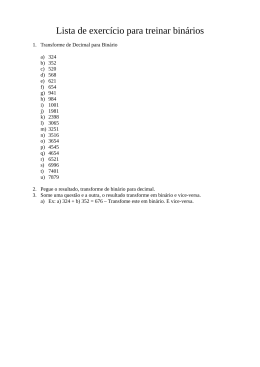
Figura 1.6
%Tn
3
5 x IN
binário máximo
2
arranqu
e
zona instável
1
binário nominal
corrente nominal
0
100
% nS
Figura 1.7
A zona de funcionamento estável do motor, é a zona compreendida entre o ponto de binário
máximo e o de escorregamento nulo (ponto de velocidade nominal). O ponto de funcionamento
7/11
Máquinas Eléctricas
Motores assíncronos
nominal do motor encontra-se na intersecção da curva do binário motor com a curva do binário da
carga (binário resistente) que a máquina accionada exige.
T
Tcarga
Taceleração
Ttravagem
Ponto de estabilidade
Tmotor
n1
n
n2
n
v Na velocidade de sincronismo, o binário é nulo
v Na zona compreendida entre a velocidade nominal e a velocidade de sincronismo, a curva
de binário é linear (recta) e o binário é proporcional ao escorregamento.
v As curvas binário-velocidade são função da resistência rotórica4
o Variando a resistência, não varia o binário máximo, mas apenas a sua posição
o O binário máximo dá-se para um escorregamento (smax ), para o qual a reactância
iguala o valor da resistência total do rotor (R2 + Rexterna)
o Para um determinado binário, na zona recta, estável, da curva de binário, o
escorregamento é praticamente proporcional à resistência total do rotor.
v O binário motor, para todos os escorregamentos, é proporcional ao quadrado da tensão de
alimentação {um motor que desenvolve um binário de arranque de 120%, à tensão nominal, quando
alimentado a 80% da tensão nominal, terá um binário de arranque de 120% x 0,8 2 = 76,8 %}
v A corrente absorvida, para todos os escorregamentos, é proporcional à tensão de
alimentação {se o motor anterior tem uma corrente de arranque de 500% à tensão nominal, quando
alimentado a 80% da tensão nominal, absorverá uma corrente de arranque de 500% x 0,8 = 400% }
Motor de rotor bobinado
Já foi indicado que, nos motores, se podem alterar algumas das suas características, por exemplo,
alterando a resistência do rotor, alterando, consequentemente, o seu comportamento mecânico (binário
/ velocidade) e eléctrico (corrente absorvida). No caso dos motores com rotor bobinado e através dos
segmentos/escovas há a possibilidade de ligar, em série com as bobines do rotor, resistências externas,
desde Rext = 0 (rotor em curto circuito ≡ Rext em curto circuito) até Rext elevadas (arranque – limitação
das correntes elevadas). Para cada valor de Rext – ligadas às bobines do rotor – obtêm-se um par de
curvas Corrente – Figura 1.8 / Binário – Figura 1.9.
Pode também deduzir-se a equação que dá o valor do binário motor, para cada valor de
escorregamento, partindo dos valores de projecto de um motor concreto, alimentado a uma
determinada tensão V1 :
4
Fundamental para os motores de rotor bobinado
8/11
Máquinas Eléctricas
Motores assíncronos
TM = Tmax
2
s
+ s max
s
s max
Em zonas de escorregamento reduzido e inferior a s max pode linearizar-se esta expressão, de
acordo com:
s << s max
pelo que:
s /s max ≈ 0
vindo a expressão:
T =T
M
2
max
s
max
s
=
2 ⋅T
s
max
⋅s
max
T = K⋅s
M
em que K é uma constante para cada escorregamento máximo. Esta expressão pode ser
aproveitada para determinar os reóstatos de arranque.
x IN
Rext = 0
5
Rext = R1
Rext = R2
4
Rext = R3
Rext = R4
3
Rext = R5
2
Rext = R6
1
0
s
1
0,8
0,6
0,4
0,2
0
Figura 1.8
3
x TN
Rext = R6
Rext = R5
2,5
2
Rext = R4
1,5
Rext = R3
Rext = R2
Rext = R1
Rext = 0
1
0,5
1
s
0
0,8
0,6
0,4
0,2
0
Figura 1.9
R6 > R5 > R4 > R3 > R2 > R1
9/11
Máquinas Eléctricas
Motores assíncronos
Motor de gaiola de esquilo
O rotor deste tipo de motores tem as bobinas rotóricas substituídas por barras longitudinais,
soldadas dos topos por aneis – curto circuitadas (figura 1.10). Assim, não existe possibilidade de
regulação.
Figura 1.10
As barras, constituintes da gaiola, podem ser de cobre macio, ligas de cobre, alumínio 5 ou ligas
de alumínio
O rotor deste tipo de motores pode ser constituído por uma ou duas gaiolas. Cada gaiola tem
ranhuras onde são encastradas as barras, que se unem nos topos por anéis do mesmo metal. As barras
não estão isoladas, relativamente à ranhura, surgindo, por esta razão, algumas correntes parasitas que
originam binários da mesma natureza. É, obviamente, uma forma construtiva extremamente robusta.
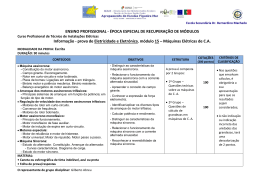
No entanto, a sua natureza
construtiva mecânica, condiciona as suas %T
características (tornando-as fixas) de
300
binário e corrente, Isto é, não se
consegue actuar sobre as características 275
D
250
eléctricas do rotor (tal como nos rotores
bobinados
quando
se
adicionam 225
C
resistências). Desta forma, diferentes 200
características de binário e de corrente 175
apenas podem ser obtidas por projecto, 150
B
tendo dado origem a 4 tipos de gaiolas – 125
A, B, C e D6 – correspondentes a 4 tipos 100
de binários e correntes, tal como pode 75
ser observado na figura 1.11
50
Estes tipos de motores são obtidos
à custa de variações em torno da
construção do rotor, nomeadamente
através de ranhuras finas e com pouca
5
6
25
0
10
20
30
40
50
60
70
80
90
100
% nS
Figura 1.11
Que diminui o peso / inércia do rotor
Nomenclatura NEMA
10/11
Máquinas Eléctricas
Motores assíncronos
altura (figura 1.12), ranhuras profundas (figura 1.12) e gaiolas duplas (figura 1.13).
Gaiola externa
Gaiola interna
Figura 1.13
11/11
Baixar