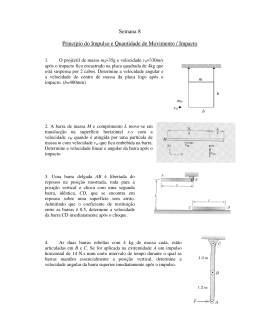
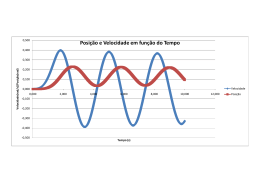
ANÁLISE DE VELOCIDADE E ACELERAÇÃO DE MECANISMOS DE 4 BARRAS COM ABORDAGEM GEOMÉTRICA E COMPUTACIONAL Carlos Sergio Pivetta1; Osvaldo Prado De Rezende2; Mário Luís Campos3; Roberto Grechi4;José Geraldo Trani Brandão5 1,2,3,4 ETEP - Faculdade de Tecnologia de São José dos Campos/Escola de Engenharia, Av. Barão do Rio 1 Branco, 882 – Jardim Esplanada CEP 12232-800, São José dos Campos - SP, [email protected], 2 3 4 [email protected], [email protected], [email protected] 5 UNESP- Universidade Estadual Paulista, Av. Ariberto Pereira da Cunha, 333 – Bairro Pedregulho, 5 12516-410 , Guaratinguetá – SP, [email protected] Resumo: A análise de velocidade e de aceleração de mecanismos de 4 barras pode ser feita por diversos métodos o que geralmente envolve relativos esforços matemáticos ou computacionais. Há diferentes formas e abordagens, as quais usam recursos computacionais, tais como planilhas de cálculos, ou calculadoras programáveis. Tais recursos permitem a criação e a simplificação de métodos buscando maior rapidez e precisão nos resultados da análise. Este trabalho apresenta um método que permite resultados altamente precisos e que demandam pequenos esforços matemáticos e computacionais. Consiste em utilizar os conceitos fundamentais da Cinemática, adaptando-se um procedimento matemático adequado de cálculos de velocidade e de aceleração de pontos de interesse do mecanismo. É usada uma abordagem geométrica e computacional para a análise cinemática dos pontos de interesse do mecanismo. Os resultados obtidos com a utilização deste método demonstraram que o mesmo permite facilidade de implementação, precisão, confiabilidade e rapidez no processamento. Palavras-chave: Análise cinemática de mecanismos 4 barras, Cálculos de velocidade e aceleração de mecanismos, Análise computacional de mecanismos Área do Conhecimento: III - Engenharias Introdução O projeto e a análise cinemática de mecanismos articulados planos requerem atenção e conhecimento específico neste tópico. Geralmente são desenvolvidas abordagens complexas que envolvem equações diferenciais, cálculos vetoriais e matriciais e que requerem elevados esforços matemáticos e computacionais. Os procedimentos gráficos, quando utilizados, são adequados para a análise cinemática de poucos pontos de interesse. Entretanto, não permitem alta precisão nos resultados, principalmente se executados manualmente. Além disto, têm limitações técnicas tais como dificuldades nos traçados, definição de escala conveniente, problemas com as pequenas diferenças existentes nos ângulos de direções dos vetores de velocidade ou de acelerações. Os métodos gráficos, com a utilização de sistemas auxiliares de desenho minimizam-se os erros de execução e de leitura (FLORES e CLARO, 2007). A utilização de um método alternativo, o qual permite evitar os problemas já citados é apresentado neste trabalho. Este método permite melhor visualização e compreensão do funcionamento do mecanismo em estudo, proporcionando facilidade de implementação ao se utilizar calculadoras programáveis ou planilhas eletrônicas. Metodologia Um mecanismo plano de 4 barras é um sistema mecânico composto de elementos articulados. O estudo de posição, de velocidade e de aceleração dos mecanismos articulados é realizado considerando-se idealmente apenas as barras de ligação com as respectivas articulações, visando a simplificação. Outro aspecto importante a ser mencionado é que de uma forma geral a análise de mecanismos articulados é feita considerandose as barras como corpos rígidos. Consideram-se também as articulações sem folgas e sem interferências. A Figura 1 apresenta um esquema básico de um mecanismo de 4 barras com as representações normalmente usadas na análise de posição, de velocidade e de aceleração. A convenção de sempre numerar as peças começando com o elo fixo (o suporte), o membro de entrada (a segunda peça), bem como as respectivas posições angulares (NORTON, 1999). É ilustrada a barra fixa denominada R1, a qual é o elo terra, ou seja, o suporte fixo do mecanismo. É representada numa posição horizontal, a qual XIII Encontro Latino Americano de Iniciação Científica e IX Encontro Latino Americano de Pós-Graduação – Universidade do Vale do Paraíba 1 geralmente é utilizada no estudo tradicional de mecanismos. O ponto O2 é convencionalmente definido como a origem no plano cartesiano xy. A barra de entrada R2 tem sua posição definida pelo ângulo θ2, medido positivamente no sentido antihorário. A barra intermediária R3 e a de saída R4 têm suas posições definidas, respectivamente, pelos ângulos θ3 e θ4 com valores medidos positivamente no sentido anti-horário. α3 ω3 y P R5 B R3 α2 A α α4 θ3 ω4 ω2 R4 R2 θ2 O2 θ4 R1 O4 x Figura 1 - Esquema de um mecanismo de 4 barras A estrutura ABP refere-se ao posicionamento de um ponto de interesse P, definido pela barra R5 e pelo ângulo α. As velocidades e acelerações angulares das barras R2, R3 e R4 são denominadas respectivamente de ω2, ω3, ω4 e α2, α3 e α4. Ao movimentar o mecanismo acionando a barra R2 o ponto P, o qual pertence à peça intermediária, descreve uma trajetória denominada curva acopladora (MANSOUR & OSMAN, 1970). Os comprimentos das barras determinam as características de funcionamento do mecanismo. De acordo com Norton (1999), utilizando-se a Lei de Grashof, que é uma relação simples para predizer o comportamento rotacional das barras, pode-se determinar rapidamente o tipo de mecanismo presente. Esta lei é descrita matematicamente pela expressão 1: S + L <= P + Q 1 Sendo S e L, respectivamente, os comprimentos da barra menor e da maior, P e Q, os comprimentos das demais barras. Se a condição descrita for atendida, o mecanismo será do tipo Grashof, e a menor das barras, ao funcionar, poderá girar 360º em relação ao plano fixo do sistema. Desta forma, observando-se a Figura 1, de acordo com Mabie & Ocvirk (1980), pode-se predizer, em função das dimensões das barras, as seguintes possibilidades de mecanismos de 4 barras: a) dois mecanismos tipo manivela-balancim, diferentes, quando a menor barra for a manivela ( a barra motora), R2 ou R4; b) mecanismo manivela-dupla, quando a menor barra for a fixa, R1; c) mecanismo balancim-duplo, quando a menor barra for a R3. Se a condição de Grashof não for atendida, o mecanismo resultante será do tipo balancim-duplo. Caso haja igualdade na Expressão 1 o mecanismo será do tipo Grashof, o qual é chamado de especial e poderão ocorrer problemas quando as barras ficarem alinhadas (NORTON, 1999). A análise de velocidade e de aceleração de um ponto de interesse do mecanismo pode ser feita por vários métodos. Alguns deles tornam-se mais interessantes, dependendo do caso, mas possuem limitações. Dentre as alternativas tem-se os métodos gráficos, nos quais se usam os polígonos das velocidades e das acelerações, empregando os conceitos de velocidade e de aceleração relativas. Outros métodos de análise utilizam álgebra complexa, equações diferenciais, métodos vetoriais e matriciais etc. A velocidade de um ponto de interesse do mecanismo pode ser determinada utilizando-se a Expressão 2 ( MABIE & OCVIRK,1980; UICKER, PENNOCK & SHIGLEY,2003): v = lim ∆t → 0 ∆s ∆t 2 A aceleração de um determinado ponto de interesse do mecanismo pode ser determinada utilizando-se a Expressão 3 (MABIE & OCVIRK , 1980) ; UICKER, PENNOCK & SHIGLEY (2003): a = lim ∆t → 0 ∆v ∆t 3 Mabie & Reinholtz (1987) publicaram um programa em FORTRAN com as rotinas para o cálculo de velocidades e acelerações de um mecanismo de 4 barras. Mansour e Osman (1970) apresentaram o método iterativo para o cálculo da velocidade e da aceleração de mecanismos de 4 barras dos tipos manivela-balancim e manivelas-duplas. A manivela é considerada o elo motor, ou seja, de entrada. Para pequenos incrementos aplicados no ângulo de posição θ2 da barra de entrada, por meio de um modelo matemático não linear, as raízes são determinadas. Então, a posição do ponto P da barra intermediária é determinada. Desta forma, o pequeno incremento angular em θ2 causa uma perturbação de proximidade da posição anterior. XIII Encontro Latino Americano de Iniciação Científica e IX Encontro Latino Americano de Pós-Graduação – Universidade do Vale do Paraíba 2 O método de Mansour e Osman exige um relativo esforço matemático, pois a velocidade e a aceleração são obtidas fazendo-se a diferenciação parcial das equações de posição e de velocidade. Requer também, o uso de duas equações da circunferência com centros em A com raio R3 e em O4 com raio R4 e, expansão de série de Taylor para obtenção da posição do ponto B. Além disto, é necessário recorrer ao método iterativo de Newton-Raphson e estabelecer um erro para as iterações. Mabie & Ocvirk (1980) apresentaram o método de diferenciação gráfica que também requer trabalho elevado e não permite muita precisão. Usando-se de uma abordagem geométrica, Uicker, Pennock & Shigley (2003) apresentaram equações para a determinação das posições do ponto de interesse P conforme ilustrado na Figura 1. Esta abordagem é descrita com o auxilio da Figura 2 e as Expressões 4 até 18. Empregando o recurso geométrico pode-se definir uma barra imaginária S de ligação entre os pontos A e O4, formando assim os dois triângulos O2AO4 e ABO4. y 7 γ = ± cos [ (R3 + R4 - S ) / ( 2 R3 R4 )] 8 -1 2 -1 2 2 2 2 2 Os sinais “+” ou “-“ dos valores de γ serão os resultados, respectivamente, para configurações de mecanismo de 4 barras aberta ou fechada. Para os ângulos de posição da barra de entrada R2 de 0 ≤ θ2 ≤ 180º os valores de θ3 e θ4 são determinados pelas Expressões 9 e 10: θ3 = φ - β θ4 = 180º - λ - β 9 10 Para ângulos de posição da barra de entrada R2 de 180º ≤ θ2 ≤ 360º os valores de θ3 e θ4 são determinados pelas Expressões 11 e 12: θ3 = φ + β 11 θ4 = 180º - λ + β 12 O ponto O2 é a referência e as posições dos pontos A, B e P em relação a esta referência podem ser determinadas pelas Expressões 13, 14, 15, 16, 17 e 18: P R5 B α R3 γ θ3 A λ = cos [ (R4 + S - R3 ) / ( 2 R4 S )] φ xA = R2 cos θ2 13 yA = R2 sen θ2 14 xB = R2 cos θ2 + R3 cos θ3 = R1 + R4 cos θ4 15 yB = R2 sen θ2 + R3 sen θ3 = R4 sen θ4 16 xP = R2 cos θ2 + R5 cos ( θ3 + α) 17 yP = R2 sen θ2 + R5 sen ( θ3 + α) 18 R4 R2 S λ θ2 θ4 β O2 R1 O4 Figura 2 – Esquema do mecanismo determinar as posições dos pontos P e B. x para Conhecendo-se os comprimentos das barras R1, R2, R3, R4, R5, os ângulos de posição θ2 e α, e utilizando-se a lei dos cosenos, é possível determinar facilmente os valores de S, os ângulos θ3, θ4, β, γ, φ, e conseqüentemente as coordenadas dos pontos P e B, considerando-se a origem no ponto O2. As Expressões 4, 5, 6, 7 e 8 são usadas para a determinação dos valores mencionados que se referem à fase em estudo: S = ( R1 + R2 – 2 R1 R2 cos θ2 ) 2 2 1/2 4 β = cos [ (R1 + S - R2 ) / ( 2 R1 S )] 5 φ = cos [ (R3 + S - R4 ) / ( 2 R3 S )] 6 -1 -1 2 2 2 2 2 2 Ao se aplicar uma mínima perturbação na barra de entrada R2, ou seja, uma mínima variação no ângulo de posição θ2 da barra de entrada, o deslocamento angular, e conseqüentemente o movimento do ponto A, durará um tempo mínimo ∆t. Este tempo terá o mesmo valor para executar os deslocamentos dos pontos B e P, da posição inicial até a final. De acordo com as Expressões 2 e 3, quanto menor for o deslocamento angular de θ2, menor será o tempo ∆t, o qual tenderá a zero, e então, as velocidades e as acelerações médias tenderão ao valor das instantâneas. Quando o valor de ∆t for muito pequeno, as velocidades e as acelerações nas direções x e y, bem como as resultantes, terão valores muito precisos. XIII Encontro Latino Americano de Iniciação Científica e IX Encontro Latino Americano de Pós-Graduação – Universidade do Vale do Paraíba 3 A Figura 3 ilustra uma trajetória genérica do ponto P saindo da posição Pi-1 e chegando na posição Pi. Para se determinar a velocidade e a aceleração médias do ponto P nas direções x e y neste intervalo pode-se utilizar as Expressões 19, 20, 21, 22, 23 e 24. Os índices “i“ e “i-1“ indicam os valores de posição, velocidade e aceleração do mecanismo na posição atual e na posição anterior, respectivamente. vxPi = ( xPi - xPi-1 ) / ∆t 19 vyPi = (yPi – yPi-1) / ∆t 20 2 2 1/2 vPi = (vxPi + vyPi ) 21 axPi = (vxPi – vxPi-1) / ∆t 22 ayPi = (vyPi – vyPi-1) / ∆t 23 2 2 1/2 aPi = (axPi + ayPi ) cujos resultados são apresentados nas Tabelas S6-1 e S7-1 do apêndice F de Norton (1999). As dimensões do mecanismo de 4 barras foram especificadas em pés (ft do sistema inglês) e neste trabalho foram convertidas para mm. Os dados do mecanismo de 4 barras utilizados neste exemplo, com as dimensões em mm são: R1 = 1828,8 (6 ft), R2 = 609,6 (2 ft), R3 = 2133,6 (7ft), R4 = 2743,2 (9ft) e R5 = 1828,8 (6ft). Os ângulos de referência são θ2 = 30º e α = 30º. A velocidade angular constante é ω2 = 10 rad/s, portanto, aceleração angular α2 = 0. A Figura 4 ilustra a fase do mecanismo em estudo para θ2 = 30º. B P 24 y Pi ω2 α2 Pi -1 yPi yPi - 1 trajetória do ponto P A O2 O4 Figura 4 – Esquema da fase do mecanismo x xPi -1 xPi Figura 3 – Ilustração de uma trajetória genérica do ponto P O valor de ∆t pode ser determinado pela Expressão 25, obtido em segundos ao se utilizar ∆θ2 em graus e N em rps: ∆t = ∆θ2 / ( 360 N ) Usando-se o valor incremental do ângulo de posição da barra de entrada no valor de θ2 = 0,1º, o qual representará um pequeno intervalo de -4 tempo ∆t = 1,74533 . 10 segundos. As posições dos pontos B e P foram determinadas considerando-se a barra R2 girando no sentido anti-horário. As Figuras 5 e 6 ilustram as trajetórias dos pontos B e P, respectivamente. POSIÇÕES PONTO B 25 3000 Se a velocidade angular constante ω2 for conhecida, o valor de N pode ser determinado pela Expressão 26: N=ω/(2π) 2500 2000 1500 26 1000 Resultados 500 Um exemplo de aplicação para o mecanismo de 4 barras de configuração aberta é apresentado. Os dados do mecanismo referem-se aos problemas Nº 6-4 com a Tabela P6-1 (págs. 281 e 282) e Nº 7-3 com a Tabela 7-1 (págs. 328 e 329), 0 -1000 -500 0 500 1000 Figura 5 Trajetória do ponto B XIII Encontro Latino Americano de Iniciação Científica e IX Encontro Latino Americano de Pós-Graduação – Universidade do Vale do Paraíba 4 A Figura 7 ilustra o sentido de medição dos ângulos θvB e θvP referentes às posições dos vetores velocidade vB e vP, e analogamente para os ângulos de posição das acelerações θaB e θaP. POSIÇÕES DO PONTO P 3000 2500 θvP Pi 2000 vP 1500 Figura 7 Ângulo de velocidade e aceleração 1000 posição dos vetores 500 Tabela 3 – Velocidades dos pontos P 0 -1400 -1200 -1000 -800 -600 -400 -200 0 Figura 6 Trajetória do ponto P Os resultados obtidos com a aplicação do método proposto, para o exemplo citado, são fornecidos nas Tabelas de 1 a 6. A Tabela 1 apresenta as coordenadas de posição dos pontos B e P respectivamente xB , yB e xP, yP nas proximidades de θ2 = 30º. Os valores para a posição θ2 = 30º serão destacados em negrito. Tabela 1 – Coordenadas dos pontos B e P θ2 [º] [mm] [mm] [mm] [mm] 29,8 567,822 2436,202 -356,434 1903,123 29,9 569,525 2437,083 -355,288 xB yB xP yP θ2 [º] 29,8 vxP [m/s] 6,577 vyP [m/s] 10,612 12,485 θvP [º] 58,211 29,9 6,566 10,593 12,463 58,207 30,0 6,555 10,573 12,441 58,203 30,1 6,544 10,554 12,418 58,199 30,2 6,533 10,535 12,396 58,195 vP [m/s] As acelerações dos pontos B e P e as orientações θaB e θaP das posições dos vetores aB e aP nas proximidades do ângulo θ2 = 30º referente à posição da barra de entrada R2 são apresentadas nas Tabelas 4 e 5. Tabela 4 – Acelerações do ponto B axB [m/s2] ayB [m/s2] aB [m/s2] 1904,971 θ2 [º] 29,8 -108,508 -106,185 151,820 θaB [º] 224,380 -109,002 -106,096 152,111 224,226 30,0 571,225 2437,961 -354,144 1906,817 29,9 30,1 572,922 2438,835 -353,001 1908,659 30,0 -109,492 -106,006 152,400 224,073 1910,497 30,1 -109,979 -105,913 152,686 223,921 30,2 -110,464 -105,819 152,970 223,770 30,2 574,616 2439,707 -351,861 As velocidades dos pontos de interesse B e P e as orientações θVB e θVP das posições dos vetores velocidade vB e vP nas proximidades do ângulo de posição θ2 = 30º da barra de entrada R2 são apresentadas nas Tabelas 2 e 3. Tabela 2 – Velocidades dos pontos B θ2 [º] 29,8 vxB [m/s] 9,779 vyB [m/s] 5,066 11,014 θvB [º] 27,386 29,9 9,760 5,048 10,988 27,346 30,0 9,741 5,029 10,963 27,306 30,1 9,722 5,011 10,937 27,266 30,2 9,703 4,992 10,912 27,226 vB [m/s] Tabela 5 – Acelerações do ponto P θ2 [º] 29,8 axP [m/s2] ayP [m/s2] aP [m/s2] -61,628 -110,415 126,449 θaP [º] 240,832 29,9 -62,058 -110,607 126,827 240,705 30,0 -62,487 -110,796 127,203 240,588 30,1 -62,914 -110,983 127,575 240,452 30,2 -63,340 -111,167 127,946 240,327 A Tabela 6 apresenta os resultados obtidos na utilização do método proposto fornecendo as velocidades angulares ω3 e ω4 das barras R3 e R4, respectivamente. Também são fornecidas as acelerações angulares α3 e α4, respectivamente, para as barras R3 e R4. XIII Encontro Latino Americano de Iniciação Científica e IX Encontro Latino Americano de Pós-Graduação – Universidade do Vale do Paraíba 5 Tabela 6 – Velocidades e acelerações angulares das barras R3 e R4 θ2 [º] 29,8 ω3 [rad/s] 6,000 ω4 [rad/s] -4,010 α3 [rad/s2] 25,644 α4 [rad/s2] 53,067 29,9 5,996 -4,001 25,863 53,199 30,0 -5,991 -3,992 26,080 53,331 30,1 5,986 -3,982 26,296 53,461 30,2 5,982 -3,973 26,511 53,590 Discussão Ao se comparar os resultados das Tabelas 7, 8, 9 e 10 referentes aos dados obtidos pelo método proposto com os dados da referência, cujas unidades foram fornecidas no sistema inglês, por Norton (1999), para o mecanismo de 4 barras de configuração aberta, pode-se observar que os erros nos valores obtidos são muito pequenos. As Tabelas 7 e 8 apresentam a comparação das velocidades e das acelerações do ponto P e as posições dos vetores vP e aP para o ângulo de posição θ2 = 30º da barra R2, nas quais observa-se que há grande precisão. As Tabelas 9 e 10 apresentam os resultados das velocidades e das acelerações angulares das barras R3 e R4, comparados com a referência, e também neste caso, pode-se verificar grande precisão. Tabela 7 – Velocidades e acelerações do ponto P e ângulos vetores (NORTON, 1999) θ2 [º] vP [ft/s] θvP [º] aP [ft/s2] θaP [º] 30,0 40,8 58,2 419 240,4 Tabela 8 – Velocidades e acelerações do ponto P e ângulos dos vetores obtidos pelo método proposto θ2 [º] 30,0 vP [ft/s] 40,815 θvP [º] 58,203 aP [ft/s2] 417,331 θaP [º] 240,578 Tabela 9 – Velocidades e acelerações angulares das barras R3 e R4 (NORTON,1999) θ2 [º] ω3 [rad/s] ω4 [rad/s] α3 [rad/s2] α4 [rad/s2] 30,0 -6,0 -4,0 26,1 53,3 Tabela 10 – Velocidades e acelerações angulares das barras R3 e R4 obtidos pelo método proposto θ2 [º] ω3 [rad/s] ω4 [rad/s] α3 [rad/s2] α4 [rad/s2] 30,0 -5,991 -3,992 26,080 53,331 Conclusão O procedimento desenvolvido e aqui discutido apresentou resultados adequados e satisfatórios, permitiu analisar um mecanismo de 4 barras utilizando-se o MS Excel para os cálculos propostos e poderá ser implementado em calculadoras programáveis. Este método possibilita elevada precisão nos resultados, ao se adotar um valor muito pequeno ângulo incremental ∆θ2 de acordo com as necessidades estabelecidas para o problema em estudo e requer pequeno esforço matemático e computacional. Outro ponto positivo importante refere-se ao fato de que o aprendizado do aluno e até as aplicações profissionais na área de Engenharia tornam-se mais claras e permitem melhor visualização dos movimentos dos pontos de interesses dos sistemas articulados. Agradecimentos Os autores agradecem a ETEP - Faculdade de Tecnologia de São José dos Campos, a UNESP Universidade Estadual Paulista de Guaratinguetá, ao CREA SP - Conselho Regional de Engenharia Arquitetura e Agronomia do Estado de São Paulo e ao Dr. Airton Nabarrete do ITA – Instituto Tecnológico de Aeronáutica pelo apoio e incentivo para a realização deste trabalho. Referências - MABIE, H. H., OCVIRK, F. W. Mecanismos e Dinâmica das Máquinas. 2ª Edição. Editora Ao Livro Técnico. 1980. - MABIE, H. H.; REINHOLTZ, C. F. Mechanisms and Dynamics of Machinery. 1ª Edição. New York, NY. Editora John Wiley & Sons. 1987. - MANSOUR, W.M., OSMAN, M. O. M, A Proximity Perturbation Method for Linkage Kinematics. United Engineering Center-ASME Pubication, 70Mech-4, New York, 1970. - NORTON, R. L. Design Of Machinery – An Introduction to the Synthesis And Analysis Of Mechanisms And Machines. 1ª edição Editora McGraw-Hill. 1999. - UICKER Jr, J. J.;PENOOCK, G. R.; SHIGLEY, J. E. - Theory of Machines and Mechanisms. 3ª Edição. New York, NY. Oxiford University Press, Inc. 2003. - FLORES, P., CLARO, J. C. P. – Cinemática de Mecanismos. 1ª Edição. Edições Almedina S.A. Coimbra, Portugal, 2007. XIII Encontro Latino Americano de Iniciação Científica e IX Encontro Latino Americano de Pós-Graduação – Universidade do Vale do Paraíba 6
Baixar