UNIVERSIDADE FEDERAL DO CEARÁ
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
FRANCISCO HUGO COSTA NETO
DIAGNÓSTICO DE FALHAS INCIPIENTES EM TRANSFORMADORES DE
POTÊNCIA UTILIZANDO O SISTEMA NEURO – DIFUSO ANFIS
FORTALEZA
2013
FRANCISCO HUGO COSTA NETO
DIAGNÓSTICO DE FALHAS INCIPIENTES EM TRANSFORMADORES DE
POTÊNCIA UTILIZANDO O SISTEMA NEURO – DIFUSO ANFIS
Trabalho de Final de Curso apresentado ao
Departamento de Engenharia Elétrica da
Universidade Federal do Ceará, como
requisito para a obtenção do Título de
Engenheiro Eletricista.
Orientador: Prof. Dr. Arthur Plínio de
Souza Braga.
FORTALEZA
2013
À Antônio Gomes de Araújo (in memorian).
AGRADECIMENTOS
Agradeço a Deus por ter me dado força de vontade nos momentos difíceis. Sou
grato ao povo brasileiro por ter financiado meus estudos nesta universidade pública e de
qualidade. Agradeço à minha família pelo apoio incondicional. Sem vocês não teria
chegado tão longe. Gostaria de reconhecer a importância dos amigos e colegas que me
ajudaram nesta longa jornada. Agradeço ao professor Artur Braga pela solicitude e
paciência em me orientar ao longo deste trabalho. Também sou grato ao professor
Márcio Amora pela grande ajuda para a realização deste trabalho. Por fim, não poderia
deixar de agradecer ao amigo, orientador e professor Tarcísio Maciel por todo apoio ao
longo de minha graduação. Não fui o melhor, mas fiz o melhor que pude. Não pensei
que poderia chegar tão longe e espero seguir em frente com toda minha dedicação.
“Penso, logo existo.”
René Descartes
RESUMO
O diagnóstico de falhas incipientes em transformadores de potência com isolamento a
óleo permite às concessionárias de energia elétrica planejar de forma mais eficiente sua
estratégia de manutenção do sistema e, com isso, buscar garantir um serviço de melhor
qualidade a seus consumidores. Entre as abordagens para realizar esse diagnóstico estão
os métodos baseados nos gases dissolvidos no óleo isolante, dentre os quais se destaca o
método clássico denominado Triângulo de Duval. Visando contornar limitações e
inconsistências comuns aos métodos convencionais de diagnóstico de falhas incipientes,
este trabalho investiga a utilização de uma técnica de Inteligência Artificial (IA)
denominada Sistema de Inferência Baseado em Rede Adaptativa (Adaptive NetworkBased Inference System – ANFIS). O método em estudo é um sistema neuro-difuso que
aprende regras a partir do treinamento com exemplos de diagnósticos corretos
fornecidos por especialistas. Para avaliar o método proposto, uma análise comparativa
entre o sistema ANFIS e o Triângulo de Duval é realizada. Os resultados obtidos
apontam que a utilização do ANFIS no problema tratado tem potencial para aumentar a
confiabilidade e a qualidade dos diagnósticos de falhas diante do caráter dinâmico nãolinear da geração de gases a partir dos materiais isolantes dos transformadores. Nas
simulações computacionais realizadas, o ANFIS obteve uma média de acertos em
diagnósticos de falhas em torno de 90%, e o método de Duval obteve uma média de
85% de diagnósticos corretos. Quando erros de medida são incluídos no conjunto de
dados, a precisão do ANFIS passa a 80% enquanto o método de Duval fica em torno de
70%.
Palavras-chave: Transformador de potência, Diagnóstico de falhas, Lógica difusa,
Redes neurais artificiais.
ABSTRACT
The diagnosis of incipient faults in power transformers with insulating oil allows
electric energy concessionaires to plan more efficiently its maintenance strategy of the
system and, therefore, seek to ensure a better quality service to its customers. Among
the approaches to accomplish such diagnosis there are methods based on the dissolved
gases in the insulating oil, among which stands out the classic method known as Duval
Triangle. In order to avoid limitations and inconsistencies common to conventional
methods of diagnosing incipient faults, this work investigates the use of a technique of
Artificial Intelligence (AI) denominated Adaptive Network-Based Inference System
(ANFIS). The method under study is a neuro-fuzzy system that learns rules from
training examples of correct diagnoses provided by experts. To evaluate the proposed
method, a comparative analysis between ANFIS and Duval Triangle system is
performed. The obtained results point that the use of ANFIS in the treated problem has
potential to improve the reliability and quality of fault diagnosis front nonlinear
dynamic characteristics of the generation of gases from insulating materials of the
transformers. In computer simulations, the ANFIS system scores a hit in fault diagnosis
around 90%, and the method of Duval got an average of 85% of correct diagnoses.
When measurement errors are included in the data set, the accurancy of ANFIS
becomes 80% while the method of Duval stands around 70%.
Keywords: Power Transformer, Fault Diagnosis, Fuzzy Logic, Artificial Neural
Networks.
LISTA DE ILUSTRAÇÕES
Figura 1.1 – Exemplo de um sistema elétrico de potência .............................................01
Figura 2.1 – Efeito da temperatura na geração dos gases combustíveis .........................08
Figura 2.2 – Gráfico de Dörnenburg ..............................................................................10
Figura 2.3 – Triângulo de Duval ....................................................................................12
Figura 3.1 – Tipos de fronteiras ......................................................................................18
Figura 3.2 – Representação gráfica dos mapeamentos ...................................................19
Figura 3.3 – Complemento do conjunto difuso A ..........................................................21
Figura 3.4 – União de dois conjuntos difusos usando max ............................................22
Figura 3.5 – União de dois conjuntos difusos usando soma algébrica ...........................23
Figura 3.6 –Interseção de dois conjuntos difusos usando min .......................................24
Figura 3.7 – Interseção de dois conjuntos difusos por meio do produto ........................24
Figura 3.8 – Implicação entre dois conjuntos difusos ....................................................25
Figura 3.9 – Modelo de um Sistema de Inferência Difuso (FIS) ...................................27
Figura 3.10 –Adaptive Network-Based Fuzzy Inference System (ANFIS) ..................31
Figura 4.1 – Fluxograma de simulação ..........................................................................37
Figura 4.2 – Esquema de validação cruzada ...................................................................38
Figura 4.3 – Histograma dos índices de precisão – Validação .......................................45
Figura 4.4 – Índice de acerto por tipo de falha – Treinamento – ANFIS02 ...................48
Figura 4.5 – Índice de acerto por tipo de falha – Validação – ANFIS02 .......................49
Figura 4.6 – Índice de acerto por tipo de falha – Treinamento – ANFIS03 ...................50
Figura 4.7 – Índice de acerto por tipo de falha – Validação – ANFIS03 .......................51
Figura 4.8 – Índice de acerto por tipo de falha – Treinamento – ANFIS05 ...................52
Figura 4.9 – Índice de acerto por tipo de falha – Validação – ANFIS05 .......................53
Figura 4.10 – Índice de acerto por tipo de falha – Treinamento – Duval .......................54
Figura 4.11 – Índice de acerto por tipo de falha – Validação – Duval ...........................55
Figura 4.12 – Triângulo de Duval com o caso A1 em destaque .....................................59
Figura 4.13 –Funções de pertinência para a entrada %C2H4 .........................................59
Figura 4.14 – Triângulo de Duval com o caso A2 em destaque .....................................60
LISTA DE TABELAS
Tabela 2.1 – Razões de gases para o método de Rogers ................................................09
Tabela 2.2 – Razões de gases para o método de Dörnenburg ........................................10
Tabela 2.3 – Limites de concentração e geração de gases ..............................................11
Tabela 2.4 – Relações de gases segundo a IEC 60599 ...................................................13
Tabela 2.5 – Concentração de gases para validação do método de Dörnenburg ............13
Tabela 2.6 – Relações de gases segundo a norma NBR 7274.........................................14
Tabela 3.1 – Principais funções de pertinência ..............................................................20
Tabela 4.1 – Parâmetros específicos de simulação dos sistemas ANFIS .......................40
Tabela 4.2 – Parâmetros gerais de simulação dos sistemas ANFIS ...............................41
Tabela 4.3 – Precisão por rodada de treinamento ...........................................................42
Tabela 4.4 – Precisão média para um conjunto de 10 rodadas – Treinamento ..............43
Tabela 4.5 – Precisão por rodada para a validação .........................................................43
Tabela 4.6 – Precisão média para um conjunto de 10 rodadas – Validação ...................44
Tabela 4.7 – Análise estatística da precisão – Treinamento ...........................................44
Tabela 4.8 – Análise estatística da precisão – Validação ...............................................45
Tabela 4.9 – Classes de diagnóstico consideradas .........................................................47
Tabela 4.10 – Matriz de confusão de treinamento – ANFIS02 – Menor Precisão .........48
Tabela 4.11 – Matriz de confusão de treinamento – ANFIS02 – Maior Precisão ..........48
Tabela 4.12 – Matriz de confusão de validação– ANFIS02 – Menor Precisão ..............49
Tabela 4.13 – Matriz de confusão de validação – ANFIS02 – Maior Precisão .............49
Tabela 4.14 – Matriz de confusão de treinamento – ANFIS03 – Menor Precisão..........50
Tabela 4.15 – Matriz de confusão de treinamento – ANFIS03 – Maior Precisão ..........50
Tabela 4.16 – Matriz de confusão de validação– ANFIS03 – Menor Precisão .............51
Tabela 4.17 – Matriz de confusão de validação – ANFIS03 – Maior Precisão .............51
Tabela 4.18 – Matriz de confusão de treinamento – ANFIS05 – Menor Precisão..........52
Tabela 4.19 – Matriz de confusão de treinamento – ANFIS05 – Maior Precisão ..........52
Tabela 4.20 – Matriz de confusão de validação– ANFIS05 – Menor Precisão ..............53
Tabela 4.21 – Matriz de confusão de validação – ANFIS05 – Maior Precisão ............53
Tabela 4.22 – Matriz de confusão de treinamento – Duval – Menor Precisão ..............54
Tabela 4.23 – Matriz de confusão de treinamento – Duval – Maior Precisão ...............54
Tabela 4.24 – Matriz de confusão de validação– Duval – Menor Precisão ...................55
Tabela 4.25 – Matriz de confusão de validação – Duval – Maior Precisão ...................55
Tabela 4.26 – Análise da adição de erros às medidas – Treinamento ............................56
Tabela 4.27 – Análise da adição de erros às medidas – Validação ................................56
Tabela 4.28 – Matriz de confusão para o método de Duval ...........................................57
Tabela 4.29 – Matriz de confusão para o ANFIS02 .......................................................58
Tabela 4.30 – Amostra com diagnóstico incorreto .........................................................58
LISTA DE ABREVIATURAS E SIGLAS
ABNT:
Associação Brasileira de Normas Técnicas
ANFIS:
Adaptive Network-Based Inference System
CH4:
Metano
C2H2:
Acetileno
C2H4:
Etileno
C2H6:
Etano
CO:
Monóxido de Carbono
CO2:
Dióxido de Carbono
DGA:
Dissolved Gas-in-oil Analysis
D1:
Descargas Elétricas de Baixa Energia
D2:
Descargas Elétricas de Alta Energia
FIS:
Fuzzy Inference System
H2:
Hidrogênio
IEC:
International Electrotechnical Commission
IEEE:
Institute of Electrical and Electronic Engineers
N2:
Nitrogênio
NBR:
Norma Brasileira
O2:
Oxigênio
OLTC:
On Load Tap Changer
PD:
Descarga Parcial
PPM:
Partes por milhão
T1:
Falha Térmica para Temperaturas Inferiores a 300 ºC
T2:
Falha Térmica para Temperaturas Entre 300 ºC e 700 ºC
T3:
Falha Térmica para Temperaturas Superiores a 700 ºC
SUMÁRIO
1 INTRODUÇÃO ......................................................................................................... 1
1.1 Motivação ............................................................................................................... 2
1.2 Objetivos................................................................................................................. 3
1.3 Organização do Documento .................................................................................... 4
2 DIAGNÓSTICO DE FALHAS INCIPIENTES EM TRANSFORMADORES ........... 5
2.1 Formação de Gases em Transformadores................................................................. 5
2.2 Diagnóstico Baseado na Concentração de Gases no Óleo Isolante ........................... 8
2.3 Limitações das Técnicas Convencionais ................................................................ 14
2.4 Novas Metodologias .............................................................................................. 15
2.5 Considerações parciais .......................................................................................... 16
3 LÓGICA DIFUSA ................................................................................................... 17
3.1 Conjuntos Difusos ................................................................................................. 17
3.2 Operações ............................................................................................................. 21
3.3 Sistema de Inferência ............................................................................................ 26
3.4 Sistemas Neuro-Difusos e ANFIS ......................................................................... 30
3.5 Considerações parciais .......................................................................................... 34
4 RESULTADOS ...................................................................................................... 35
4.1 Dados Cromatográficos ......................................................................................... 35
4.2 Metodologia de Simulação Adotada ...................................................................... 36
4.3. Parâmetros de Simulação ..................................................................................... 39
4.4Índices de Precisão ................................................................................................. 41
4.5 Matrizes de Confusão ............................................................................................ 47
4.6 Análise da Sensibilidade ao Erro .......................................................................... 56
4.7 Exemplos de diagnóstico para casos críticos .......................................................... 57
4.8 Considerações parciais .......................................................................................... 60
5 CONCLUSÕES ....................................................................................................... 62
REFERÊNCIAS ......................................................................................................... 63
1
1 INTRODUÇÃO
Transformadores de potência são equipamentos fundamentais nos sistemas de
corrente alternada, pois ao transformar tensões, correntes e impedâncias em níveis
apropriados permitem interligar geração, transmissão e distribuição de energia de forma
otimizada. Conforme indicado na Figura 1.1, o transformador de potência é um
componente indispensável do sistema elétrico. Portanto, é importante monitorar o seu
funcionamento, a fim de evitar que falhas os levem a operar de modo irregular,
garantindo a adequação aos indicadores de qualidade e de confiabilidade exigidos pelas
agências reguladoras (BECHARA, 2010; GOMEZ, 2013).
Figura 1.1 – Exemplo de um sistema elétrico de potência.
Fonte: Adaptado de (BROWN, 2002)
Este capítulo faz uma breve discussão a respeito do diagnóstico de falhas
incipientes em transformadores de potência. Na seção 1.1 são apresentadas as
motivações do trabalho, ressaltando o assunto investigado e justificando a escolha do
tema. Na seção 1.2 são indicados os objetivos que o trabalho busca atingir. Por fim, a
seção 1.3 descreve a organização geral do documento.
2
1.1 Motivação
Diante da posição estratégica dos transformadores de potência no sistema
elétrico é muito importante o desenvolvimento de sistemas de monitoramento e de
diagnóstico periódico que permitam a identificação de anomalias e a tomada de decisões
que evitem a ocorrência de falhas graves (BECHARA, 2010).
As principais falhas que podem acometer um transformador são originadas no
processo de envelhecimento natural do equipamento combinado com os esforços
térmicos (temperaturas elevadas) e elétricos (sobrecarga e curto-circuito) passíveis de
acontecer no regime de trabalho ao qual está submetido. Esses esforços deterioram o
sistema de isolamento, tanto em sua parte sólida, constituída de celulose, como em sua
parte líquida, formada pelo óleo isolante, como consequência desse processo de
degradação diferentes gases são produzidos (AMORA, 2013).
Portanto, deve ser estabelecido um plano de manutenção preventiva que
permita a avaliação de riscos de falha. As falhas incipientes de natureza térmica e
elétrica destes equipamentos podem ser determinadas a partir de diferentes tipos de
ensaio, como físico-químico e cromatográfico (SENNA, 2010).
O ensaio cromatográfico é o método mais comum de diagnóstico de falhas em
transformadores, uma vez que comparado ao teste físico-químico fornece uma maior
quantidade de informações. O ensaio cromatográfico, também chamado de Análise de
Gás Dissolvido (Dissolved Gas-in-Oil Analysis – DGA) indica de modo mais eficiente
que o ensaio físico-químico as condições operacionais que comprometem a vida útil do
transformador (BARBOSA, 2103; SENNA, 2010).
Os métodos de diagnóstico de falhas em transformadores baseados em DGA
consideram a avaliação do tipo, da concentração e da taxa de produção de gases gerados
e dissolvidos no óleo do transformador, de modo a associar o tipo de falha aos gases
presentes. Estes métodos são amplamente utilizados e padronizados por normas
internacionais, como IEEE C57.104-2008e IEC 60599-2008 (AMORA, 2013).
Entretanto, inúmeros fatores provocam incertezas nos valores medidos de
concentração de gases e na interpretação deste conjunto de informações. Por exemplo, a
solubilidade dos gases na celulose e no óleo pode variar de modo significativo de
acordo com a temperatura ambiente. Além disso, o tipo de equipamento e suas
3
condições de operação influenciam diretamente o volume de gases gerados (ZIRBES;
ZURN; ROLIM, 2005).
Os métodos e procedimentos de medição também influenciam os resultados
dos diagnósticos. Por exemplo, medidas de gases com baixa concentração possuem
incerteza significativa, podendo apresentar variações da ordem de 40% (ZIRBES;
ZURN; ROLIM, 2005).
Nos últimos anos, diversas técnicas para o diagnóstico de falhas têm sido
desenvolvidas baseando-se em métodos de Inteligência Artificial (IA), como
aprendizagem de máquinas, sistemas especialistas, lógica difusa, redes neurais e árvores
de decisão. Estas novas metodologias buscam superar algumas das limitações
observadas nas técnicas clássicas, como baixa precisão e inexistência de diagnósticos. A
grande maioria das técnicas propostas conduziu à melhores resultados (MORAIS,
2004).
1.2 Objetivos
Os métodos convencionais de diagnóstico foram baseados em evidências
empíricas, portanto, sujeitos a imprecisões. Estas incertezas implicam em limitações,
como ambiguidades decorrentes da possibilidade de mais de um diagnóstico ou
resultados incorretos (AMORA, 2013).
O processo de formação de gases no interior dos transformadores é bastante
complexo, com isso as técnicas convencionais de modelagem de falhas mostram-se
restritas. O problema requer uma modelagem matemática muito complexa para
descrever de forma precisa o comportamento da concentração dos gases em função das
falhas existentes. Por conseguinte, o uso de métodos heurísticos para a obtenção de
diagnósticos torna-se possível. Várias técnicas de IA foram desenvolvidas com o
objetivo de construir um modelo que permita associar corretamente as concentrações
dos gases às falhas incipientes no interior do transformador.
Este trabalho final de curso propõe-se a investigar a aplicação de uma técnica
híbrida de IA com o objetivo de melhorar o desempenho do diagnóstico de falhas
incipientes em transformadores de potência, tornando-o mais preciso e eficiente.
A técnica híbrida de IA analisada é denominada Sistema de Inferência Baseado
em Rede Adaptativa (Adaptive Network-Based Inference System – ANFIS). Trata-se de
4
um sistema neuro-difuso que modela o conhecimento de especialistas a partir do
treinamento com exemplos de diagnósticos corretos fornecidos por especialistas
(JANG, 1993).
Para avaliar o método proposto, uma análise comparativa entre o sistema
ANFIS e o método clássico denominado Triângulo de Duval é realizada. Esta análise
será feita por meio de simulação computacional e utilizará um banco de dados de
reconhecida confiabilidade.
Este trabalho também analisará a sensibilidade aos erros de medida do ANFIS
e do método de Duval. Este estudo tem como objetivo analisar como os métodos de
diagnóstico lidam com informações imprecisas. Esta análise é importante, pois na
maioria das aplicações não se pode garantir que as medidas realizadas em laboratório
sejam totalmente corretas.
1.3 Organização do Documento
O restante do documento é organizado em quatro capítulos. O capítulo 2 trata
diagnóstico de falhas incipientes em transformadores de potência, revisitando os
fundamentos da análise dos gases dissolvidos. Nesse capítulo serão analisadas as
desvantagens dos métodos convencionais
O capítulo 3 faz uma apresentação dos fundamentos da lógica difusa e do
sistema de inferência adaptativo ANFIS. Neste capítulo são estudadas as vantagens da
lógica difusa em relação à lógica clássica.
O estudo comparativo dos resultados obtidos com o método proposto em
relação ao método convencional de Duval é mostrado no capítulo 4. Este capítulo
contém uma análise comparativa da sensibilidade dos métodos a erros nos dados de
concentração de gases.
Por fim, no capítulo 5, são apresentadas as principais conclusões decorrentes
das análises efetuadas ao longo do trabalho.
5
2 DIAGNÓSTICO DE FALHAS INCIPIENTES EM TRANSFORMADORES
A análise do óleo isolante dos transformadores de potência fornece
informações importantes a respeito de suas condições de funcionamento. As técnicas de
diagnóstico baseadas em DGA são utilizadas há décadas e em escala mundial, tendo
sido padronizadas por normas nacionais e internacionais, como a ABNT NBR 7274,
IEEE C57.104-2008 e IEC 60599 (MORAIS, 2004). A partir da análise dos gases
dissolvidos é possível estabelecer relações entre a concentração de gases dissolvidos,
temperatura, processo de falha e a sua intensidade (AMORA, 2013).
Este capítulo faz uma breve discussão a respeito do diagnóstico de falhas
incipientes em transformadores de potência. Na seção 2.1 são discutidas as falhas
térmicas e elétricas mais comuns em transformadores e sua relação com a formação de
gases dissolvidos no óleo. A seção 2.2 discute o diagnóstico baseado na concentração
dos gases dissolvidos no óleo, mostrando as técnicas mais utilizadas. Na seção 2.3 são
analisadas as limitações das técnicas convencionais. Na seção 2.4, são discutidas formas
de melhorar as metodologias clássicas utilizando técnicas de IA. Por fim, na seção 2.5
são feitas as considerações finais do capítulo.
2.1 Formação de Gases em Transformadores
As falhas ocorridas nos transformadores de potência muitas vezes estão
relacionadas ao seu sistema de isolamento. O sistema de isolamento do transformador
sofre desgastes em função do seu envelhecimento, entretanto esse processo pode ser
acelerado uma vez que ao longo de sua operação o óleo isolante e outros materiais
dielétricos
podem ser
submetidos
a
severas
condições
térmicas,
elétricas,
eletromagnéticas e eletrodinâmicas decorrentes de falhas. Consideram-se como
principais agentes de degradação a água, o oxigênio e os produtos do envelhecimento do
óleo e dos materiais isolantes sólidos (MORAIS, 2004; NOGUEIRA, 2004).
As falhas em transformadores de potência podem ser classificadas em térmicas
e elétricas. Estas falhas podem ocorrer de forma isolada ou simultânea.
As
falhas
térmicas
são
caracterizadas
por
sobreaquecimentos.
Os
sobreaquecimentos de até 300ºC, que podem ser detectados nos enrolamento ou pontos
6
quentes no núcleo, são ocasionados por refrigeração insuficiente, sobrecargas ou perdas
excessivas de magnetização. Sobreaquecimentos de até 1000 ºC são causados por
correntes de Foucault no núcleo ou devido ao mau contato de seletores de tensão.
Sobreaquecimentos
acima
de
1000ºC
são
ocasionados
por
curtos-circuitos
interlaminares no núcleo (HELL, 2002).
As falhas elétricas estão associadas às descargas internas no equipamento,
envolvendo tensão e frequência de operação. As falhas elétricas em transformadores de
potência são conhecidas como descargas parciais, corona e arco elétrico. Descargas
parciais são caracterizadas por uma série de descargas elétricas rápidas por um meio
isolante entre duas partes ativamente condutoras. As descargas parciais de baixa
intensidade aparecem devido à baixa eficiência dos materiais isolantes, entretanto não
gera deteriorações perceptíveis nos materiais envolvidos. As descargas parciais de alta
intensidade surgem em decorrência de sobre-solicitação do isolamento. Neste caso, são
gerados sinais de deterioração dos materiais (BARBOSA, 2013; HELL, 2002).
A descarga elétrica de baixa energia (corona) é ocasionada por um aumento no
gradiente da tensão aplicada entre dois condutores que leva o meio isolante em volta dos
condutores a se tornar condutor. No ambiente do transformador, o isolante líquido é o
meio ionizado. O arco elétrico, ou descarga elétrica de alta energia, apresenta duração
efetiva e é caracterizado pelas maiores temperaturas entre as falhas elétricas, ocorrendo
devido a curtos-circuitos internos dos enrolamentos, ou curtos-circuitos em conexões de
potenciais contra a terra ou devido a descargas entre condutores não-isolados
(BARBOSA, 2013; HELL, 2002).
Esses processos resultam na formação de gases que são parcial ou totalmente
dissolvidos no óleo, sendo assim transportados para todos os pontos que o óleo possa
atingir. Desse modo, através de análises de amostras do óleo é possível obter
informações de todos os componentes internos em contato com o mesmo (NOGUEIRA,
2004).
O sobreaquecimento do óleo isolante induz a produção de gases etileno (C 2H4)
e metano (CH4), juntamente com pequenas quantidades dos gases hidrogênio (H 2) e
etano (C2H6). Se o sobreaquecimento resultar em temperaturas muito elevadas podem
ser detectadas pequenas quantidades de acetileno (C2H2) (ARANTES, 2005; GOMEZ,
2013).
As descargas elétricas de baixa energia que levam a temperaturas na faixa de
150ºC a 500ºC produzem gases hidrogênio (H2) e metano (CH4) e, em pequenas
7
quantidades, os gases etano (C2H6) e etileno (C2H4). Caso a celulose sofra
decomposição em função dessa falha, grandes quantidades de monóxido de carbono
(CO) e dióxido de carbono (CO2) podem ser observadas (AMORA, 2013; GOMEZ,
2013).
Em falhas elétricas em que há formação de arco elétrico há produção de
grandes volumes dos gases hidrogênio (H2) e acetileno (C2H4) e em menor quantidade
os gases metano (CH4) e etileno (C2H4) (AMORA, 2013; GOMEZ, 2013).
A decomposição da celulose produz água, monóxido de carbono e dióxido de
carbono e é influenciada principalmente pela temperatura do óleo. Outros fatores de
degradação são o oxigênio e a umidade (SENNA, 2010). Em situações de temperatura
muito elevada, a geração de monóxido de carbono aumenta de forma acelerada em
relação à produção de dióxido de carbono. Quando a concentração de dióxido de
carbono cresce mais rápido que a de monóxido de carbono significa que o
transformador está com problemas de ventilação ou sob uma leve sobrecarga (AMORA,
2013).
Por conseguinte, a análise dos gases dissolvidos, ou análise cromatográfica dos
gases dissolvidos, permite identificar as condições de funcionamento e detectar
possíveis defeitos existentes. Conforme estabelecido pela norma IEEE C57.104-2008
os gases dissolvidos podem ser combustíveis, como o hidrogênio (H 2), monóxido de
carbono (CO), metano (CH4), etano (C2H6), etileno (C2H4) e acetileno (C2H2), ou
podem ser não-combustíveis, como o oxigênio (O2), dióxido de carbono (CO2) e o
nitrogênio (N2) (AMORA, 2013; ARANTES, 2005).
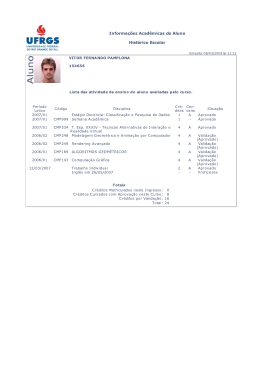
O modelo termodinâmico proposto por Halstead, mostrado na Figura 2.1,
descreve, em condições ideais de temperatura e pressão, as relações entre as
características dos gases produzidos e a temperatura. De acordo com este modelo, todos
os hidrocarbonetos que constituem o óleo isolante são decompostos nas mesmas
substâncias e que entre as mesmas existe um equilíbrio termodinâmico de modo que a
evolução da concentração de cada gás pode ser calculada para cada qualquer
temperatura. Com isso, a distribuição da concentração de gases pode significar uma
determinada falha caracterizada em termos de temperatura e duração da falha
(ARANTES, 2005; BARBOSA, 2013).
Entretanto, este modelo possui limitações. Primeiramente, ele só considera
situações ideais. Além disso, ele não permite uma caracterização bem definida do
sistema quando duas ou mais falhas ocorrem simultaneamente (BARBOSA, 2013).
8
Figura 2.1 – Efeito da temperatura na geração dos gases combustíveis.
(a) Pressão parcial dos gases
(b) Concentração dos gases
Fonte: (BARBOSA, 2013).
Este modelo permite estabelecer uma relação entre a distribuição da
concentração de gases e o estado do equipamento. Este tipo de análise constitui o cerne
de muitos métodos de diagnóstico de falhas.
2.2 Diagnóstico Baseado na Concentração de Gases no Óleo Isolante
Os métodos de diagnóstico baseados na análise dos gases dissolvidos são
amplamente utilizados uma vez que tornam possível a detecção e a localização de falhas
incipientes de modo seguro e sem a necessidade de interromper o funcionamento do
equipamento (MORAIS, 2004).
A análise dos gases dissolvidos no óleo isolante tem por objetivo a avaliação
da condição de normalidade do sistema de isolamento, identificando possíveis falhas
que estejam ocorrendo. A estimativa das falhas incipientes geralmente é feita tendo
como base valores de referência estabelecidos por modelos estatísticos e por meio da
análise dos resultados por especialistas (ZIRBES; ZURN; ROLIM, 2005).
Quando uma falha incipiente acontece, as quantidades de gases gerados são
muito pequenas. A extração e análise de amostras de óleos são condições fundamentais
9
para a identificação precoce de faltas. O uso abrangente das técnicas de análise de gás se
tornou possível devido ao desenvolvimento de técnicas que permitiram analisar
pequenas amostras de óleo com grande sensibilidade e precisão (HELL, 2002).
A maioria dos métodos de diagnóstico de falhas foi desenvolvida
empiricamente, essas metodologias tiveram o seu uso bastante difundido e as
publicações decorrentes desses trabalhos foram transformadas em recomendações ou
normas (SENNA, 2010).
Entre os principais métodos de diagnóstico de falhas baseados em análise de
gases dissolvidos estão os métodos de Rogers, Dörnenburg, e Triângulo de Duval. As
principais normas relacionadas ao tema são a IEEE C57.104-2008, IEC 60599-2008 e
NBR 7274.
2.2.1 Método de Rogers
O método de Rogers baseia-se nas relações das concentrações dos gases H2,
CH4, C2H6 e C2H4 e nos limites de variações destas relações para emitir o diagnóstico.
Este conjunto de relações é constantemente atualizado com o objetivo de ajustar o
método aos resultados de novas análises de falhas de equipamentos. É uma das técnicas
mais utilizadas nas empresas concessionárias de energia (GOMEZ, 2013). Entretanto,
em caso de ocorrências simultâneas de falhas o diagnóstico pode ser ambíguo, uma vez
que as faixas de variação das relações apresentam superposições permitindo mais de
uma interpretação (GOMEZ, 2013; SENNA, 2010). A Tabela 2.1 mostra a associação
entre as diferentes faixas de razões entre gases e o diagnóstico associado.
Tabela 2.1 – Razões de Gases para o Método de Rogers
Diagnóstico
CH4/H2
C2H2/C2H4
C2H2/C2H6
> 0,1 a < 1,0
< 0,1
< 1,0
< 0,1
< 0,1
< 1,0
Descarga de Alta Energia
0,1 a 1,0
0,1 a 3,0
> 3,0
Falha Térmica T < 300ºC
> 0,1 a < 1,0
< 0,1
0,1 a 3,0
Falha Térmica 300ºC < T < 700ºC
> 1,0
< 0,1
0,1 a 3,0
Falha Térmica T > 700ºC
> 1,0
< 0,1
> 3,0
Condição Normal
Descarga de Baixa Energia
Fonte: Adaptado de (AMORA, 2013).
10
2.2.2 Método de Dörnenburg
O método de Dörnenburg utiliza a relação de concentração dos gases
dissolvidos, de modo análogo ao realizado no método de Rogers. São consideradas duas
relações principais (CH4/C2H2 e C2H2/C2H4) e duas auxiliares (C2H2/CH4 e C2H6/C2H2)
para indicar uma falha entre três tipos: sobreaquecimento, descargas de baixa energia e
descargas de alta energia (AMORA, 2013; GOMEZ, 2013).
A Tabela 2.2 mostra as razões de gases consideradas pelo método e os
respectivos diagnósticos.
Tabela 2.2 – Razões de Gases para o Método de Dörnenburg
Diagnóstico
CH4/H2
C2H2/C2H4
C2H2/CH4
C2H6/C2H2
Falta Térmica
> 1,0
< 0,75
< 0,3
> 0,4
Descarga de Baixa
< 0,1
-
< 0,3
> 0,4
> 0,1 e < 1,0
> 0,75
> 0,3
< 0,4
Energia
Descarga de Alta Energia
Fonte: Adaptado de (AMORA, 2013).
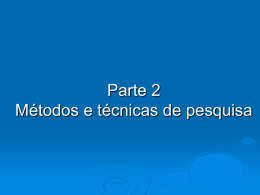
O método de Dörnenburg também pode fornecer o diagnóstico por meio da
interpretação de um gráfico, onde duas razões de gases são colocadas em eixos e
indicam o tipo de falha, conforme indicado na Figura 2.2. A região de localização dos
pontos inseridos é indicativa do tipo de falha do equipamento (BARBOSA, 2013;
GOMEZ, 2013).
Figura 2.2 – Gráfico de Dörnenburg.
Fonte: (BARBOSA, 2013).
11
Como pode ser observado, existem regiões em branco onde não se associa
nenhum diagnóstico. Logo, este método leva a situações de não-decisão, ou seja, o
diagnóstico não poderá ser realizado de modo satisfatório (BARBOSA, 2013).
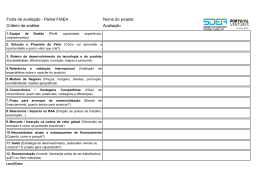
2.2.3 Método do Triângulo de Duval.
O método de Duval realiza o diagnóstico a partir de um gráfico ternário
dividido em áreas de tipos de falhas. Neste método são consideras as concentrações
relativas de três gases combustíveis, metano, etileno e acetileno, conforme indicado nas
Equações 2.1, 2.2 e 2.3, onde as concentrações dos gases devem estar em partes por
milhão (ppm) (DUVAL, 2002).
[
[
]
[
]
] [
[
[
]
[
]
]
[
]
]
]
[
]
[
[
]
[
]
Este método só é aplicado em situações de falhas, isto é, quando os três gases
mencionados aparecem juntos e o conjunto de gases combustíveis apresenta
concentrações e taxas de geração acima do indicado pela Tabela 2.3 (GOMEZ, 2013).
Tabela 2.3 – Limites de Concentração e Geração de Gases.
Concentração
Geração G1
Geração G2
Gás
(ppm/mês)
(ppm/mês)
(ppm/mês)
H2
100
10
50
CH4
75
8
38
C2H2
3
3
3
C2H4
75
8
38
C2H6
75
8
38
CO
700
70
350
CO2
7000
700
3500
Fonte: Adaptado de (GOMEZ, 2013).
12
Confirmada a existência do problema e conhecidas as porcentagens de metano,
etileno e acetileno o tipo de falha é diagnosticado diretamente no gráfico triangular,
mostrado na Figura 2.3.
Figura 2.3 – Triângulo de Duval
Fonte: (DUVAL, 2002).
As concentrações destes três gases são localizadas como coordenadas no
triângulo e permitem identificar três falhas de origem elétrica e três de origem térmica
(GOMEZ, 2013) codificadas pela norma IEC 60599 da seguinte forma:
a) PD – descargas parciais;
b) D1 – descargas de baixa energia;
c) D2 – descargas de alta energia;
d) T1 – falha térmica para temperaturas abaixo de 300 ºC;
e) T2 – falha térmica para temperaturas entre 300 ºC e 700 ºC;
f) T3 – falha térmica para temperaturas acima de 700 ºC.
Além disso, existe uma região de falhas indeterminadas, denominada DT, para
indicar falhas de descarga elétrica e térmicas. Esta classificação de falhas é válida para
transformadores com comutadores do tipo On Load Tap Changer (OLTC). Este
método é descrito no apêndice B da norma IEC 60599.
13
2.2.4 Normas
Os métodos apresentados anteriormente formam a base para as padronizações
do Instituto de Engenheiros Eletricistas e Eletrônicos (Institute of Electrical and
Electronic
Engineers - IEEE), da Comissão Internacional de Eletrotécnica
(International Electrotecnical Comission – IEC) e Associação Brasileira de Normas
Técnicas (ABNT).
A norma IEC 60599 apresenta um método de diagnóstico baseado nas razões
entre os gases combustíveis metano (CH4), hidrogênio (H2), acetileno (C2H2), etileno
(C2H4) e etano (C2H6) (GOMEZ, 2013; ZIRBES, ZURN e ROLIM, 2005). Conforme
indicado na Tabela 2.4.
Tabela 2.4 – Relações de gases segundo a IEC 60599.
Diagnóstico
C2H2/C2H4
CH4/H2
C2H4/C2H6
*
< 0,1
< 0,2
>1
0,1 a 0,5
>1
Descarga de Alta Energia
0,6 a 2,5
0,1 a 1
>2
Falha Térmica T< 300 ºC
*
> 1*
<1
Falha Térmica 300 ºC < T < 700 ºC
< 0,1
>1
1a4
Falha Térmica T > 700 ºC
< 0,2
>1
>4
Descarga Parcial
Descarga de Baixa Energia
* Não significativo
Fonte: (ZIRBES, 2005)
A norma IEEE C57.104-2008 recomenda a adoção do método de Dörnenburg
porém, os valores de concentração de gases de referência utilizados para a validação da
aplicação do método foram alterados. Esta alteração corresponde aos valores de
referência recomendados para uma avaliação geral quanto à condição de normalidade
dos equipamentos (ZIRBES; ZURN; ROLIM, 2005). Os valores de referência são os
apresentados na Tabela 2.5.
Tabela 2.5 – Concentração de gases para validação do método de Dörnenburg
Concentração (ppm)
H2
CH4
C2H6
C2H4
100
120
65
50
Fonte: (ZIRBES, 2005)
C2H2/
35
14
A revisão da NBR 7274, intitulada Interpretação da análise dos gases de
transformadores em serviço indica os métodos de amostragem de gases e as técnicas de
análise de gases dissolvidos. Esta norma é baseada na IEC 60599, tal que o diagnóstico
é estabelecido com base nas razões C2H2/C2H4, CH4/H2 e C2H4/C2H6 (BARBOSA,
2013; ZIRBES, ZURN e ROLIM, 2005), conforme indicado na Tabela 2.6.
Tabela 2.6 – Relações de gases segundo a norma NBR 7274
Diagnóstico
C2H2/C2H4
CH4/H2
C2H4/C2H6
Envelhecimento Normal
< 0,1
0,1 a 1,0
< 1,0
Descarga Parcial de Baixa Energia
< 0,1
< 0,1
<1
0,1 a 3,0
< 0,1
<1
> 0,1
0,1 a 1,0
>1
Descarga de Alta Energia
0,1 a 3,0
0,1 a 1,0
> 3,0
Falha Térmica T < 300ºC
< 0,1
> 0,1
<1
Falha Térmica 300ºC < T < 700ºC
< 0,1
> 1,0
1,0 a 3,0
Falha Térmica T > 700ºC
< 0,1
> 1,0
> 3,0
Descarga Parcial de Alta Energia
Descarga de Baixa Energia
Fonte: (ZIRBES, ZURN e ROLIM, 2005)
2.3 Limitações das Técnicas Convencionais
As técnicas convencionais de diagnóstico de falhas baseadas na análise de gás
dissolvido são baseadas mais em evidências empíricas do que em teorias científicas.
Portanto, deve ser admitido que a análise de gases e a interpretação dos seus resultados
estão sujeitas a variabilidade. Diversos fatores influem de modo contribuir na
imprecisão das medidas e na imprecisão das interpretações. Entre os motivos para gerar
incertezas nas técnicas de análise de gás dissolvido estão os diferentes métodos de
fabricação dos equipamentos, dos sistemas de preservação e circulação do óleo, além do
histórico do carregamento dos transformadores (MORAIS, 2004; SENNA, 2010).
Os métodos convencionais de diagnóstico são concebidos para diagnósticos
individuais, entretanto podem ocorrer situações onde estes processos atuam de forma
conjunta ou como um processo em cadeia. Situações desse tipo levam a diagnósticos
ambíguos ou até mesmo inconclusivos, o que coloca em risco a confiabilidade e a
integridade do equipamento (BARBOSA, 2013; SENNA, 2010).
15
Para a emissão de um laudo técnico há a necessidade de um especialista na
área, pois é necessária uma grande experiência e conhecimento das técnicas de análise.
Além disso, o especialista não se limita a apenas uma metodologia, pois a dinâmica dos
processos envolvidos torna cada caso ímpar. Portanto, os diagnósticos baseados na
análise de gases dissolvidos ainda são dependentes da experiência dos especialistas
humanos, permanecendo muitas vezes insatisfatórios e incompletos (BARBOSA, 2013;
CASTILLO, 2003).
2.4 Novas Metodologias
Diante das restrições das técnicas convencionais de diagnóstico inúmeras
metodologias baseadas em IA foram propostas com o intuito de tratar as incertezas
envolvidas e aumentar a precisão dos diagnósticos de falhas em transformadores
isolados a óleo. As técnicas mais utilizadas são os sistemas especialistas, redes neurais e
lógica difusa. Elas podem ser utilizadas individualmente ou em sistemas híbridos
(MORAIS, 2004).
As redes neurais são usadas extensivamente em reconhecimento de padrões.
Esta técnica de IA é adaptativa, hábil em tratar relações não-lineares e consegue
generalizar soluções para um conjunto novo de dados. Portanto, o diagnóstico de falhas
incipientes usando redes neurais pode ser considerado como uma associação entre um
conjunto de entradas (concentrações de gases ou razões dos mesmos) e saídas (tipo de
falha) (MORAIS, 2004).
Trabalhos recentes empregam redes neurais no diagnóstico do sistema isolante
de transformadores de potência e têm alcançado resultados eficientes utilizando técnicas
de treinamento adaptativas, uma vez que conseguem lidar de maneira adequada com
incertezas de medidas, imprecisões e não linearidades em razão de sua capacidade de
aprendizagem (BARBOSA, 2013).
A lógica difusa torna possível o uso de informações históricas na elaboração do
diagnóstico e levam em consideração as incertezas que levariam a erros nos métodos
convencionais. Além disso, sistemas difusos conseguem modelar a mudança dos
estados de diagnóstico de uma maneira mais suave (AMORA, 2013).
16
Os sistemas de diagnóstico baseados em lógica difusa reduzem a sensibilidade
aos erros de amostragem e análise de gases, uma vez que trabalham com maior
facilidade com as incertezas e imprecisões (MORAIS, 2004).
Entretanto, as técnicas de IA também apresentam limitações. As redes neurais
possuem grande capacidade de detecção de padrões, entretanto, os resultados obtidos
não podem ser descritos de modo claro. Os sistemas de inferência são capazes de
realizar generalizações e tomar decisões de modo muito eficiente, porém são estruturas
que não conseguem se adaptar (AMORA, 2013; BARBOSA, 2013).
Em geral, sistemas baseados na lógica difusa e redes neurais lidam de modo
eficiente com duas áreas distintas de processamento de informação. As duas técnicas
são complementares, os sistemas difusos são muito bons com a representação da
imprecisão, já as redes neurais são estruturas eficientes para aprender a partir de
exemplos (NARESH, SHARMA, VASHISTH, 2008).
Para este trabalho será feita uma análise do uso de uma técnica de IA híbrida,
um sistema neuro-difuso, para melhorar o diagnóstico de falhas em transformadores. O
próximo capítulo descreve detalhadamente a técnica adotada.
2.5 Considerações parciais
Neste capítulo foram descritos os principais tipos de falhas em transformadores
de potência, bem como suas possíveis causas. Em seguida, foram analisadas as
principais técnicas de diagnóstico de falhas incipientes baseadas em DGA. Em seguida,
foram discutidas as principais limitações destas técnicas. Por fim, foram discutidos
métodos de IA utilizados para melhora do diagnóstico de falhas incipientes.
17
3 LÓGICA DIFUSA
A lógica difusa é uma técnica de IA que busca formalizar capacidades humanas
muito importantes, como por exemplo, a capacidade de converter, raciocinar e tomar
decisões racionais em um ambiente de imprecisões, incertezas, informações
incompletas, conflito de informações, verdades parciais e possibilidade parciais
(ZADEH, 1999).
Um dos mais importantes conceitos da lógica difusa é o de variável linguística,
ou seja, variáveis que tem como valores palavras ou sentenças em vez de números. Essa
definição é responsável por sua capacidade de modelar conhecimentos vagos e
imprecisos (ZADEH, 1975).
A seção 3.1 mostra a definição e principais propriedades dos conjuntos difusos.
As operações matemáticas dos conjuntos difusos são analisadas na Seção 3.2. Os
sistemas de inferência difusos são descritos na seção 3.3. Em seguida, a seção 3.4
analisa o sistema híbrido ANFIS. É feito um estudo de sua estrutura comparando-a com
os sistemas de inferência estudados na seção anterior. Por fim, na seção 3.5 é feita uma
consideração final sobre o tema deste capítulo.
3.1 Conjuntos Difusos
Na teoria clássica de conjuntos, os conjuntos são estabelecidos de forma
precisa, ou seja, os conjuntos contêm elementos que satisfazem a um grupo específico
de propriedades. Com isso, as suas fronteiras são bem definidas, como indicado na
Figura 3.1 (a).
Na teoria dos conjuntos difusos, as regras de pertinência são imprecisas.
Portanto, determina-se de forma aproximada a pertinência ou não dos elementos deste
conjunto. Isso significa que as fronteiras dos conjuntos não são claras. Com isso, a
passagem entre duas classes não se dá de uma maneira abrupta, mas de forma suave
conforme pode ser visto na Figura 3.1 (b).
Na Figura 3.1(a) é possível definir claramente quais elementos estão dentro do
conjunto e quais elementos estão fora do conjunto. Na Figura 3.1 (b) essa afirmação não
18
é clara para todos os pontos, por exemplo, não se pode definir com total certeza se x3
pertence ou não ao conjunto A.
Figura 3.1 - Tipos de fronteiras
(a) Conjunto clássico
(b) Conjunto difuso
Fonte: autor.
Um conjunto clássico A pertencente ao conjunto universo X é representado pela
função característica,
. Se x for um elemento do conjunto A,
é igual a 1, se x não for
um elemento de A,
é igual a 0 (ROSS, 2010), conforme representado pela Equação
(3.1).
{
}
{
Um conjunto difuso A pertencente ao conjunto universo X é definido por meio
da função de pertinência,
Para qualquer elemento x, função de pertinência pode
ter elementos com valores entre 0 e 1 (ROSS, 2010), conforme representado pela
Equação (3.2).
[
]
Desse modo, conforme indicado na Figura 3.2(a), a função característica pode
ser representada domo um degrau. As funções de pertinência podem ter formatos
diferentes, apresentando valores intermediários e mudanças de estado mais suaves,
como mostrado na Figura 3.2 (b).
19
Figura 3.2 – Representação gráfica dos mapeamentos
(a) Função Característica
(b) Função de Pertinência
Fonte: autor.
As funções de pertinência podem assumir diferentes formatos, desse modo é
necessária uma análise das suas propriedades para determinar a escolha mais adequada.
A função de pertinência triangular é a mais simples das funções de transferência, sendo
obtida a partir de duas retas e descrita por meio de três parâmetros. A função trapezoidal
também pode ser obtida a partir de retas, mas diferentemente da função triangular
possui um patamar e é descrita com um parâmetro a mais (Azar, 2010). É importante
observar que pequenas variações nesses parâmetros podem alterar de forma significativa
o formato da função, diminuindo a confiabilidade da descrição do sistema.
Como alternativa às funções triangulares e trapezoidais, existem as funções
gaussianas, que são curvas continuamente diferenciáveis e que permitem transições
suaves. Além disso, as funções gaussianas são definidas apenas por dois parâmetros, o
que implica numa redução dos graus de liberdade do sistema, tornando-o mais robusto.
Apesar de a função gaussiana ser mais suave, ela é incapaz de especificar funções de
pertinência assimétricas. A função sigmóide satisfaz a esse requisito, podendo ser
assimétrica tanto do lado esquerdo como do lado direito. Outras funções de pertinência
assimétricas podem ser obtidas a partir de expressões polinomiais, como exemplo podese citar as funções Z, S e Pi. A Tabela 3.1 mostra algumas características das funções de
pertinência mais importantes.
20
Tabela 3.1. Principais funções de pertinência
Função
Parâmetros
Expressão
Gráfico
Triangular
Trapezoidal
Gaussiana
(
)
Sigmóide
Fonte: Adaptado de (MATHWORKS, 2013)
21
3.2 Operações
A maneira como os conjuntos difusos interagem é descrita matematicamente
por operações. Nesta seção serão analisadas as operações complemento, união,
interseção e implicação. As operações podem ser efetuadas da mesma forma para
conjuntos clássicos e conjuntos difusos, entretanto, diferentes interpretações podem ser
feitas.
3.2.1 Complemento
Na teoria clássica, o complemento de um conjunto indica os elementos que não
pertencem ao mesmo. Na teoria de conjuntos difusos, esta operação passa a indicar o
quanto os elementos não pertencem ao conjunto (NEGNEVITSKY, 2005). Dado o
conjunto difuso A, cuja função de pertinência é indicada por
, o complemento é
indicado pela Equação (3.3). A representação gráfica desta operação é mostrada na
Figura 3.3.
Figura 3.3 – Complemento do conjunto difuso A.
Fonte: autor.
22
3.2.2 União
A operação de união pode ser interpretada para conjuntos clássicos como a
determinação de quais elementos pertencem aos conjuntos que estão envolvidos. Para
os conjuntos difusos, a operação de união determina quanto de cada elemento pertence a
cada um dos conjuntos envolvidos (NEGNEVITSKY, 2005). Em ambos os casos, a
operação de união de conjuntos é considerada equivalente à operação lógica de união,
também representada pelo termo “ou”.
Para representar matematicamente a operação de união, consideram-se os
conjuntos difusos A e B, contidos no conjunto universo X, representados pelas funções
de pertinências
e
respectivamente. A operação de união pode ser realizada
de maneiras diferentes. Na técnica mais usual, o valor máximo de pertinência é
escolhido a partir do valor máximo de cada função de pertinência para cada ponto dos
conjuntos difusos, conforme indicado na Equação (3.4) e representado graficamente na
Figura 3. 4.
[
]
Figura 3.4. União de dois conjuntos difusos usando max.
Fonte: autor.
Outra técnica utilizada para realizar a união de conjuntos é a soma algébrica,
conforme indicado na Eq.(3.5) e representado pela Figura 3.5. Nesta operação, somam-
23
se os valores obtidos das funções de pertinência em cada ponto e em seguida
descontam-se os elementos repetidos.
Figura 3.5-União de dois conjuntos difusos usando soma algébrica.
Fonte: autor.
3.2.3 Interseção
Em conjuntos difusos, operação de interseção indica quanto de cada elemento
pertence a ambos os conjuntos, uma vez que um mesmo elemento pode pertencer
parcialmente a mais de um conjunto. Na teoria clássica de conjuntos, a interseção entre
dois conjuntos determina quais elementos pertencem a ambos os conjuntos
(NEGNEVITSKY, 2005). Em ambos os casos, a operação de interseção de conjuntos é
equivalente à operação lógica de interseção, também representada pelo termo “e”.
Dados os conjuntos difusos A e B, contidos no conjunto universo X,
representados pelas funções de pertinências
e
respectivamente, a forma
mais usual de realizar a interseção de conjuntos é indicada pela Equação (3.6), onde o
menor valor da função de pertinência é considerado para cada ponto considerado.
[
]
24
Figura 3.6 – Interseção de dois conjuntos difusos usando min.
Fonte: autor.
Outra técnica utilizada para realizar a interseção de conjuntos é o produto. Esta
operação é indicada pela Equação (3.7) e representada pela Figura 3.7.
Figura 3.7 – Interseção de dois conjuntos difusos por meio do produto.
Fonte: autor.
25
3.2.4 Implicação
Na teoria clássica, a operação de implicação, indicada por
, pode ser
descrita por meio de dois modelos típicos, o modus pones(modo que afirma) e modus
tollens (modo que nega)(ROSS, 2010), conforme indicado nas Equações (3.8) e (3.9).
(
)
A função de pertinência resultante da operação de implicação dos conjuntos
difusos A e B, contidos no conjunto universo X e representados pelas funções de
pertinências
e
pode ser representada pelas Equações (3.10) e (3.11), é
importante observar que as equações são equivalentes. Na Figura 3.8 é feita uma
representação da operação com funções de pertinência genéricas.
[
]
[
]
Figura 3.8 – Implicação entre dois conjuntos difusos.
Fonte: Elaborado pelo autor.
26
Na teoria dos conjuntos difusos, a operação de implicação também pode ser
expressa na forma de regra. Dadas as variáveis linguísticas x e y, e os valores
linguísticos A e B determinados por conjuntos difusos no universo de discurso X, uma
regra difusa pode ser conforme indicado pela Equação (3.12). As regras constituem a
base do raciocínio difuso.
{
}
{
}
O raciocínio difuso envolve duas partes distintas, solucionar o termo
antecedente da regra e aplicar o resultado no termo consequente da regra. Nos sistemas
clássicos, se o termo antecedente é verdadeiro, então o termo consequente também é
verdadeiro. Nos sistemas difusos, onde o antecedente é uma proposição imprecisa, se o
antecedente é verdadeiro em algum grau de pertinência, então o consequente também é
verdadeiro no mesmo grau, desse modo, a conclusão pode ser obtida por meio de uma
generalização do método modus pones (NEGNEVITSKY, 2005; ROSS, 2010).
Uma regra pode ser constituída por múltiplos antecedentes ou múltiplos
consequentes, conforme indicado pelas Equações (3.13) e (3.14)
{
}
{
}
{
}
{
{
}
}
{
}
{
}
{
}
Todas as partes do antecedente são calculadas simultaneamente por meio das
operações de união ou interseção, resultando em um único valor. Quando a regra possui
múltiplos consequentes, todos os termos do consequente são afetados igualmente pelo
antecedente (ROSS, 2010).
3.3 Sistema de Inferência
O sistema de inferência difuso (Fuzzy Inference System - FIS), também
chamado de sistema baseado em regras ou memória associativa, é uma parte importante
da lógica difusa, sendo o responsável pela tomada de decisões. O FIS formula regras
adequadas e com base nessas regras toma decisões. Este raciocínio é feito tendo com
27
base os conceitos de teoria dos conjuntos e nas regras difusas (SIVANANDAM;
SUMATHI; DEEPA, 2007).
Um sistema de inferência difuso, conforme mostrado na Figura 3.9, é
constituído basicamente de cinco blocos funcionais. A interface de codificação
transforma as entradas numéricas em variáveis linguísticas. Essa conversão é feita tendo
como base um conjunto de funções de pertinência. As entradas são comparadas com as
funções de pertinência para se obter um valor de pertinência para cada variável
linguística. O conjunto de regras combina os valores de pertinência de cada termo da
entrada realizando as operações vistas anteriormente, como interseção ou união. Uma
vez estabelecidos os valores dos termos antecedentes, são determinados os valores dos
termos consequentes. A unidade de tomada de decisão realiza operações de inferência
com as regras difusas. A interface de decodificação transforma os resultados difusos
obtidos pela inferência em uma saída numérica (SIVANANDAM; SUMATHI; DEEPA,
2007), (NEGNEVITSKY, 2005).
Figura 3.9. Modelo de um Sistema de Inferência Difuso (FIS).
Fonte: Adaptado de (JANG, 1993)
Os dois sistemas de inferência mais comuns são o Mamdani e o TakagiSugeno, descritos nas seções 3.3.1 e 3.3.2, respectivamente.
3.3.1 Sistema de Inferência de Mamdani
O Sistema de Inferência Difuso de Mamdani é o método de inferência mais
conhecido. Consiste basicamente de seis etapas (a) determinação do conjunto de regras
difusas; (b) codificação das entradas usando funções de pertinência; (c) combinação das
28
entradas codificadas de acordo com as operações do termo antecedente; (d)
determinação da saída de cada regra a partir do termo consequente; (e) combinação dos
termos consequentes para se ter uma distribuição da saída; (f) decodificação da
distribuição de saída (SIVANANDAM; SUMATHI; DEEPA, 2007; NEGNEVITSKY,
2005).
As regras são um conjunto de declarações linguísticas que descrevem como o
sistema de inferência deve tomar decisões, isto é, controlar a saída (consequente)
baseando-se na classificação das entradas (antecedente). As regras, em geral, têm a
organização mostrada na Equação (3.15).
{
}
{
}
{
}
Desse modo, existem funções de pertinência associadas (FP_01, FP_02 e
FP_03) a cada uma das entradas (E_01, E_02) e à saída (S_01). Estas funções de
pertinência estão associadas a conceitos difusos, como grande, pequeno, quente, frio,
forte, fraco, que são variáveis linguísticas.
Em qualquer aplicação prática, os dados de entrada podem conter erros, ou
seja, os dados podem ser imprecisos. Para contornar essa imprecisão, funções de
pertinências adequadas devem ser escolhidas (SIVANDAM; SUMATHI; DEEPA,
2007).
As saídas dos termos consequentes são combinadas, ou seja, todos os termos
consequentes de todas as regras são unidos em um único conjunto difuso. Desse modo,
a entrada do processo de agregação consiste de uma lista de funções de pertinência dos
termos consequentes e a saída é um único conjunto difuso para cada variável de saída.
O último passo do processo de inferência difusa consiste na decodificação. A
imprecisão facilita resolução das regras difusas, mas a saída final de um sistema difuso
deve ser uma variável não-linguística. A entrada do processo de codificação é o
conjunto difuso da saída agregada e a saída deve ser uma grandeza numérica
(SIVANDAM; SUMATHI; DEEPA, 2007).
Existem muitos métodos de decodificação. O método da centróide, também
chamado de centro de gravidade, estabelece a saída como o ponto onde uma linha
vertical pode dividir o conjunto agregado em duas partes iguais, conforme indicado na
Equação (3.16)
29
∫
∫
Teoricamente, o método do centro de gravidade deve ser aplicado sobre todos
os pontos contínuos da função de pertinência da saída agregada, mas na prática uma
estimativa razoável pode ser obtida por meio do cálculo com base em pontos
amostrados (NEGNEVITSKY, 2005). Esta aproximação é indicada na Equação (3.17).
∑
∑
O método de Mamdani armazena conhecimento de modo intuitivo, de modo
muito similar ao realizado pelos seres humanos, assim, é largamente utilizado pra
capturar conhecimento de especialistas. Entretanto, este método é computacionalmente
custoso (NEGNEVITSKY, 2005).
3.3.2 Sistema de Inferência de Takagi-Sugeno.
O Sistema de Inferência de Takagi-Sugeno foi proposto como um esforço para
formalizar um sistema de aproximação de geração de regras difusas a partir de um
conjunto de entradas e saídas. O método de inferência Takagi-Sugeno é muito similar ao
método Mamdani. O método Takagi-Sugeno modifica apenas o consequente da regra
difusa. Em vez de um conjunto difuso, é usada uma expressão matemática em função
dos dados de entrada (SIVANDAM; SUMATHI; DEEPA, 2007). A Equação
(3.18),ilustra um exemplo de uma regra no método de inferência Takagi-Sugeno:
{
}
{
}
Na Equação (3.18), f(x,y) é uma função polinomial das variáveis de entrada x e
y, porém, qualquer outra função que melhor se adapte ao problema em estudo pode ser
utilizada. O método de Takagi-Sugeno mais usado é o de ordem-zero, onde o termo
consequente é uma constante. A operação de agregação, isto é, a combinação dos
30
termos consequentes das regras, simplesmente combina esses termos. Em seguida
determina-se a média ponderada dessas saídas. Para um sistema constituído por n
regras, a média ponderada (Weighted Average– WE) da saída será dada pela Equação
(3.19)
∑
∑
Desse modo, o método Takagi-Sugeno dispensa a etapa de decodificação,
tornando este método computacionalmente mais eficiente, uma vez que uma operação
de integração não necessita mais ser realizada (SIVANDAM; SUMATHI; DEEPA,
2007).
O método de Mamdani busca desenvolver o raciocínio de forma intuitiva,
tornando-o facilmente interpretável. Com isso, constitui uma metodologia muito
empregada. O método de Takagi-Sugeno é amplamente utilizado com técnicas de
otimização e adaptativas, particularmente para sistemas dinâmicos não-lineares
(MATHWORKS, 2013).
3.4 Sistemas Neuro-Difusos e ANFIS
A lógica difusa lida com raciocínio em alto nível computacional com base na
informação obtida de especialistas e convertida em variáveis linguísticas. Entretanto,
sistemas de inferência difusos não têm a capacidade de aprendizagem e não conseguem
se ajustar a novos ambientes. A união dos sistemas de inferência difusos com redes
neurais em um único sistema integrado mostra-se uma aproximação promissora para a
construção de sistemas de IA. Os sistemas integrados resultantes, denominados neurodifusos podem combinar computação paralela e habilidade de aprendizagem das redes
neurais com a representação do conhecimento próxima ao humano e habilidades de
explicação dos sistemas difusos (NEGNEVITSKY, 2005).
O sistema neuro-difuso proposto por Roger Jang, denominado Adaptive
Network-Based Inference System (ANFIS), é uma rede neural com múltiplas camadas
equivalente funcionalmente ao sistema de inferência difuso de Takagi-Sugeno. Cada
31
camada do sistema é associada a um passo em particular do processo de inferência
(NEGNEVITSKY, 2005). O ANFIS é normalmente apresentado como uma Rede
Neural do tipo feedforward com seis camadas, conforme indicado na Figura 3.10. No
exemplo mostrado consideram-se duas entradas, x1 e x2, e uma saída y. Cada entrada é
representada por dois conjuntos difusos e a saída é dada por um polinômio de primeira
ordem.
Figura 3.10.Adaptive Network-Based Fuzzy Inference System (ANFIS).
Fonte: Adaptado de (JANG, 1993)
Os conjuntos difusos A1 e A2 pertencem ao conjunto universo X1, os
conjuntos difusos B1 e B2 pertencem ao conjunto universo X2. Consideram-se quatro
regras, descritas pelas Equações (3.20), (3.21), (3.22) e (3.23)
{
}
{
}
{
}
{
}
{
}
{
}
{
}
{
}
32
Com base em (JANG, 1993) descreve-se a seguir a função exercida por cada
uma das camadas do ANFIS.
Camada 1 – camada de entrada. Os neurônios desta camada simplesmente
passam o sinal externo para a próxima camada. Desse modo, a relação entre a entrada
e a saída
do neurônio i da primeira camada é indicada por
Camada 2 – camada de codificação. Os neurônios desta camada executam a
codificação das entradas. No modelo proposto por (JANG, 2003), os neurônios desta
camada usam a função de ativação a função sino, entretanto, qualquer outra como
função de pertinência pode ser utilizada. Uma função de ativação do tipo sino é
especificada como
(
onde
é a entrada,
)
do neurônio i e os termos
são
parâmetros que controlam a função de pertinência.
Camada 3 – camada de regras. Cada neurônio desta camada corresponde a uma
regra difusa Takagi-Sugeno. Um neurônio recebe como entrada informação vida da
camada de codificação e calcula cada termo resultante. A conjunção entre os termos
antecedentes é feita pelo operador produto. Assim, a saída do neurônio i da camada 3 é
obtido a partir de
∏
Camada 4 – camada de normalização. Cada neurônio nesta camada recebe
como entrada todas as saídas dos neurônios da camada de regras e calcula o valor
normalizado de cada regra. Este valor representa a contribuição de cada regra ao
resultado final. A saída
∑
de cada neurônio i é indicada pela Equação (3.27)
33
Camada 5 – camada de decodificação. Cada neurônio desta camada é
conectado ao respectivo neurônio de normalização e também recebe os sinais de entrada
x1 e x2. O neurônio de decodificação calcula o valor do termo conseqüente de uma dada
regra.
[
]
Camada 6 – camada de saída. É representada por um único neurônio que soma
as saídas de todos os neurônios da camada de decodificação, gerando a saída total do
ANFIS.
∑
O sistema ANFIS utiliza o algoritmo backpropagation para calcular os
parâmetros dos termos antecedentes das regras, mostrados na Equação (3.25). O ANFIS
também utiliza o algoritmo least-mean-squares para determinar os parâmetros dos
termos conseqüentes, mostrados na Equação (3.28) (NEGNEVITSKY, 2005).
Cada iteração do treinamento consiste de duas etapas. Na primeira etapa os
dados de entrada são propagados e os parâmetros dos termos conseqüentes são
calculados de acordo com o algoritmo least-mean-squares.Os termos dos parâmetros
antecedentes são fixados durante esta etapa. Na segunda etapa as taxas de erro são retropropagadas, desse modo, o algoritmo backpropagation é aplicado para atualizar os
parâmetros dos termos antecedentes. Dessa vez, são os parâmetros dos termos
conseqüentes que são fixados (NEGNEVITSKY, 2005).
No sistema de inferência de Takagi-Sugeno, a saída, y, é uma função linear.
Dados os parâmetros das funções de pertinência e o conjunto de entradas e saídas de
treinamento, pode-se escrever um conjunto de P equações lineares, conforme indicado
pela Eq. (3.30)
{
Este conjunto de equações pode ser escrito na forma matricial indicada pela
Equação (3.31)
34
onde yd é um vetor de saídas desejadas, com dimensão P x 1; A é um matriz de
dimensão P x n(m + 1) e k é um vetor de parâmetros consequentes de dimensão igual a
n(m + 1) x 1. O conjunto de parâmetros dos termos consequentes é obtido a partir da
pseudo-inversa indicada pela Equação (3.32)
Uma vez determinados os parâmetros dos termos consequentes das regras de
inferência é possível determinar o vetor de saída da rede neural, y. Com isso, pode-se
calcular o vetor de erros, conforme indicado pela Equação (3.33)
(3.33)
A partir desse vetor de erros determina-se a variação dos termos antecedentes.
A variação é calculada em função do erro elevado ao quadrado, E, e da taxa de
aprendizagem, conforme indicado na Equação (3.34)
3.5 Considerações parciais
O sistema ANFIS, por combinar a capacidade de aprendizagem das redes
neurais com a capacidade de raciocínio dos sistemas difusos, pode ser utilizado de
modo eficiente na modelagem de sistemas dinâmicos não-lineares, fornecendo modelos
mais simples e com menores erros de aproximação. O ANFIS permite que o
conhecimento de especialistas seja facilmente incorporado à estrutura do sistema. Ao
mesmo tempo, a sua estrutura conexionista evita a inferência difusa, processo que exige
um substancial esforço computacional.
Conforme descrito no capítulo 2, o processo de geração de gases em
transformadores de potência não pode ser modelado facilmente, uma vez que inúmeros
fatores estão envolvidos no processo. Com isso, os métodos de diagnóstico estão
sujeitos à falhas e nem mesmo especialistas com grande experiência dão diagnósticos
precisos. Deste modo, este trabalho avaliará o desempenho do uso do sistema ANFIS no
diagnóstico de falhas, de modo a superar as dificuldades listadas anteriormente.
35
4 RESULTADOS
Neste capítulo é analisado o sistema neuro-difuso ANFIS, comparando-o com
o método convencional do Triângulo de Duval.
O capítulo está organizado da seguinte forma: a seção 4.1 descreve a base de
dados usados na modelagem do sistema. A metodologia de simulação é discutida na
seção 4.2. Na seção 4.3 são analisados os parâmetros de simulação. As seções 4.4 e 4.5
mostram os resultados das simulações realizadas, levando em conta os índices de
precisão e matrizes de confusão. A seção 4.6 analisa os métodos de diagnóstico quando
à sensibilidade ao ruído. A seção 4.7 descreve duas situações de diagnóstico crítico. Por
fim, a seção 4.8 faz uma consideração dos resultados obtidos.
4.1 Dados Cromatográficos
Um conjunto adequado de dados constitui um dos requisitos básicos para a
obtenção de um sistema de diagnóstico preciso. Para a simulação computacional
realizada neste trabalho, foi utilizada uma base de dados de acesso público e de
reconhecida confiabilidade.
Este conjunto de dados é composto por 182 amostras, sendo 117 oriundas do
banco de dados do grupo de trabalho IEC TC 10 reunidas no artigo (DUVAL;
DEPABLO, 2001). O banco de dados do IEC TC 10 é constituído de análise de
equipamentos retirados de serviço, inspecionados visualmente por engenheiros com
experiência e especialistas em manutenção de modo a identificar claramente a falha do
equipamento (DUVAL; DEPABLO, 2001). Um total de 39 casos foi retirado da
referência (DUVAL, 2002), especificamente das Tabelas de I a III. Por fim, 20 casos
foram retirados a partir do trabalho (MORAIS, 2004) e 6 casos foram retirados da
referência (NARESHH; SHARMA; VASHISTH, 2008).
Do conjunto de parâmetros disponíveis nestas referências, foram consideradas
as concentrações em ppm dos gases metano [CH4], acetileno [C2H2] e etileno [C2H4].
Além do diagnóstico de falha correspondente. Os rótulos de saída para o sistema de
inferência ANFIS seguem o padrão da IEC 60599 citados no capítulo 2.
36
4.2 Metodologia de Simulação Adotada
A implementação computacional do algoritmo de IA em estudo foi feita
utilizando o software MATLAB. Para simular o sistema em diferentes configurações,
funções do pacote Fuzzy Logic Toolbox foram usadas em um código programado pelo
autor utilizando o conjunto de dados disponível. A Figura 4.1 indica o fluxograma da
metodologia de simulação.
O processo de modelagem começa pela obtenção do conjunto de dados e com a
sua divisão em dois conjuntos, os dados de treinamento e os dados de teste. Esta divisão
é realizada com o objetivo de evitar problemas de sobreajuste (overfitting) durante a
estimação de parâmetros. Essa divisão é aleatória, observando-se uma distribuição de
90% dos dados para o conjunto de treinamento e 10% dos dados para o conjunto de
teste. Os dados constituem um conjunto de vetores de entrada e saída.
Em seguida, cria-se um sistema de inferência inicial. Neste modelo inicial,
determina-se a função de pertinência, o número de conjuntos difusos associados a cada
entrada e o método de aprendizagem (otimização) a ser implementado.O conjunto de
dados de treinamento é usado para encontrar os parâmetros iniciais das funções de
pertinência. Quando os dados de treinamento são apresentados ao ANFIS o sistema de
inferência é selecionado de modo a ter parâmetros associados com o modelo de menor
erro de treinamento (MATHWORKS, 2013).
Depois que todos esses parâmetros são definidos, o sistema de inferência
inicial é colocado em treinamento, segundo o algoritmo ANFIS descrito no Capítulo 3.
O fim do treinamento pode ser determinado em função de um valor limite para
o erro entre a saída atual e a saída desejada, isto é, o ANFIS é parado quando o erro de
treinamento é menor que o erro limite. O segundo método simplesmente limita o
número de iterações de aprendizagem, quando este número é alcançado o algoritmo é
encerrado.
Em seguida, a validação do modelo de inferência obtido pelo treinamento é
realizada. Neste processo, vetores dos conjuntos de dados de entrada/saída com os quais
o modelo de inferência ANFIS não foi treinado são apresentados ao modelo treinado,
para determinar o quanto o sistema FIS é capaz de prever o conjunto valores de saída de
dados correspondentes (MATHWORKS, 2013).
37
Figura 4.1 Fluxograma de simulação
Início
Inserir Dado de Treinamento / Validação
Criar Modelo FIS Inicial
Determinar Parâmetros Iniciais
Determinar Funções de Pertinência
Escolher Método de Aprendizagem
Definir Parâmetros de Treinamento/Teste
Apresentar Dados de Treinamento no Sistema ANFIS
Verificar o Término do
Treinamento
Coletar Resultados do Treinamento
Apresentar Dados de Validação no Modelo FIS Treinado
Não
Verificar o Término
da Validação
Analisar estrutura FIS Resultante
Fim
Fonte: Adaptado de (AZAR, 2012).
Não
38
O fim do processo de validação se dá de maneira análoga ao treinamento. É
importante observar que deve ser selecionado para a validação um conjunto de dados
que seja representativo do que foi utilizado para o treinamento do modelo em análise e
que seja suficientemente distinto desse conjunto de informações para que o processo de
validação não seja trivial (MATHWORKS, 2013).
Como a quantidade de amostras representa um conjunto reduzido de dados de
simulação, a qualidade do modelo resultante foi validada por meio de uma técnica de
validação cruzada. Esta é uma técnica de análise estatística que avalia a capacidade de
generalização do modelo (AMORA, 2013; KOHAVI, 1995).
A técnica de validação utilizada neste trabalho é denominada k-fold. Ela
consiste na divisão do conjunto total de dados em k grupos de mesmo tamanho, tal que
em cada ciclo de simulação um grupo é utilizado para o teste e os demais k-1 grupos
restantes são utilizados no treinamento. Este processo é realizado k vezes, numa
alternância circular do grupo de teste, onde o grupo a ser usado como validação na
rodada k é o grupo k, por uma questão de facilidade de nomenclatura. A Figura 4.2
ilustra o processo de validação cruzada para 4 grupos.
Figura 4.2 Esquema de validação cruzada
Fonte: autor.
Na modelagem computacional realizada para este trabalho os dados foram
divididos em 10 grupos, cada um com 15 amostras. Cada grupo tem a mesma
quantidade de classes de falhas. A cada ciclo de simulação, 9 grupos foram usados
como treinamento e 1 grupo foi usado com teste
39
4.3. Parâmetros de Simulação
Com base na metodologia de simulação descrita anteriormente diferentes
configurações de sistemas de inferência ANFIS foram analisadas. O sistema possui três
entradas, correspondendo às concentrações normalizadas dos gases, e uma saída, que
indica o diagnóstico da falha. As entradas são representadas por conjuntos difusos, ou
variáveis linguísticas.
Os principais parâmetros de simulação estão resumidos nas Tabelas 4.1 e 4.2.A
Tabela 4.1 contém informações específicas de cada um dos sistemas de inferência
estudados enquanto a Tabela 4.2 mostra as características comuns dos modelos de
inferência simulados. Os parâmetros utilizados nas simulações foram obtidos
empiricamente, apresentando os melhores resultados em simulações realizadas
previamente.
É importante observar alguns aspectos a respeito dos parâmetros de simulação.
O número de variáveis linguísticas estabelece a quantidade de conjuntos difusos
associados a cada uma das entradas, ou seja, determina a quantidade de funções de
pertinência existentes para cada entrada. O número de regras (NR) depende da
quantidade de entradas (NE) e do número de variáveis linguísticas (NVL), conforme
indicado pela Equação (4.1).
(4.1)
São consideradas três entradas, cada entrada corresponde a um percentual de
um dos três gases considerados, % CH4, %C2 H2 e % C2H4, calculados conforme
indicado pelas Equações (2.1), (2.2) e (2.3). A saída corresponde ao diagnóstico.
A função de pertinência determina a quantidade de parâmetros dos termos
antecedentes, também chamados de termos lineares. O tipo de regra estabelece a
natureza do termo consequente. Em sistemas de inferência Takagi-Sugeno o termo
consequente das regras de inferência podem ser uma constante ou uma expressão
polinomial linear que tem como parâmetros as entradas.
Os passos do parâmetro de adaptação do sistema indicam o modo como o
sistema de inferência altera seus parâmetros durante processo de aprendizagem. O
tamanho do passo é diminuído se a medida de erro passa por duas combinações
consecutivas de aumento seguido de redução. O tamanho do passo é aumentado, se o
erro de medida sofre quatro quedas consecutivas (MATHWORKS, 2013).
40
Os sistemas de inferência neuro-difusos ANFIS simulados foram denominados
ANFIS 02, ANFIS 03 e ANFIS 05, indicando o uso de duas, três e cinco variáveis
linguísticas.
TABELA 4.1 – Parâmetros Específicos de Simulação dos Sistemas ANFIS
Número de Variáveis Linguísticas
2
3
5
Termo Consequente
Linear
Constante
Constante
Número de Regras
8
27
125
Gaussiana
Gaussiana
Sino
Número de Nós
34
78
286
Parâmetros Lineares
32
27
125
Parâmetros Não-Lineares
12
18
45
Total de Parâmetros
44
45
170
Passo Inicial
2,0
2,0
1,0
Taxa de Acréscimo
1,2
1,3
1,5
Taxa de Decréscimo
0,8
0,7
0,5
Função de Pertinência
Fonte: autor.
As funções de pertinência escolhidas foram a gaussiana e sino, devido ao
caráter contínuo e por necessitarem somente de dois parâmetros e três parâmetros,
respectivamente. Os operadores lógicos de união e interseção utilizam os métodos
máximo (Max) e produto (Prod), respectivamente. O capítulo 3 apresenta informações a
respeito dessas operações.
O método de agregação, ou seja, a combinação das saídas das regras utiliza
considera o valor máximo (Max) de todas as saídas. A decodificação usa a média
ponderada (Weigthed Average – WE ). A Equação 3.19 mostra como a decodificação
por média ponderada é obtida.
O método de aprendizagem (otimização) combina o método dos mínimos
quadrados (least-mean-squares)e o método do gradiente (backpropagation), também
chamado de método híbrido. Estudos realizados preliminarmente pelo autor indicaram
superioridade do método híbrido em relação aos métodos individuais.
41
TABELA 4.2 – Parâmetros Gerais de Simulação dos Sistemas ANFIS
Operador Lógico de União
Max
Operador Lógico de Interseção
Prod
Método de Agregação
Max
Método de Decodificação
WE
Método de Otimização
Híbrido
Dados de Treinamento
135
Dados de Validação
15
Fonte: autor.
4.4Índices de Precisão
O sistema de inferência associa um diagnóstico a cada conjunto de dados de
entrada, ou seja, o sistema faz uma série de classificações. Para se ter uma medida
efetiva de como é a classificação feita pelo sistema ANFIS, os resultados dos
diagnósticos foram colocados numa matriz de confusão. Numa matriz de confusão as
colunas representam as classes inferidas, enquanto que as linhas representam as classes
corretas. A matriz de confusão, também chamada de matriz de classificação, é uma
ferramenta estatística padrão de avaliação que mostra de maneira clara as previsões
erradas (elementos fora da diagonal principal), indicando a precisão com que o sistema
realiza o diagnóstico.
Com base nas matrizes de confusão, foram calculados os índices de precisão
(P) de classificação. Dada uma matriz de confusão C de M classes, o índice de precisão
é dado pela soma dos elementos da diagonal principal de C divido pelo total de
elementos não nulos desta matriz, dado por N. Ou seja, esta grandeza determina o
percentual do número de diagnósticos corretos (DC) em relação ao total de diagnósticos
realizados (TD), conforme indicado na Equação (4.2).
∑
42
A precisão permite identificar qual o sistema mais adequado de diagnóstico,
pois todos os erros são considerados da mesma forma. Este tipo de análise não pode ser
feita com o erro quadrático médio, pois como cada falha foi associada a um valor inteiro
e com isso as falhas influenciariam diferentemente nos resultados, pois falhas rotuladas
com números menores iriam ter menor peso no conjunto total dos erros.
O método de diagnóstico utilizando o método de inferência ANFIS será
comparado com a técnica convencional Triângulo de Duval. A simulação do método de
Duval foi desenvolvida com base nas referências (DUVAL, 2002) e (SINGH, 2010). A
partir dos limites das regiões das falhas foram estabelecidos intervalos de concentração
dos gases e a cada um deles associou-se um diagnóstico.
O método de Duval apesar de não necessitar das etapas de treinamento e
validação, foi desenvolvido em duas partes, utilizando validação cruzada com 10 grupos
para garantir a variabilidade estatística, devido à pequena quantidade de amostras.
A Tabela 4.3 mostra a precisão para cada rodada para o sistema de inferência
em análise em três configurações distintas (ANFIS 02, ANFIS 03 e ANFIS 05) e o
método de diagnóstico Triângulo de Duval.
Tabela 4.3 – Precisão por Rodada para o Treinamento
Método
1
2
3
4
5
6
7
8
9
10
ANFIS 02 82,22 77,78 77,78 86,67 88,89 86,67 88,89 88,89 86,67 91,40
ANFIS 03 88,89 91,11 88,89 91,11 91,11 93,33 91,11 88,89 88,89 88,89
ANFIS 05 97,78 97,78 95,56 97,78
Duval
100
100
100
97,78 100,0 100,0
87,41 85,93 85,19 87,41 86,67 85,93 86,67 86,67 85,19 87,41
Fonte: autor.
Os resultados mostrados na Tabela 4.3 indicam que o método de inferência, em
suas diferentes configurações, apresentou resultados convergentes. Além disso, pode-se
constatar que cada sistema de inferência obteve índices de precisão da mesma ordem, e
em muitos casos, superiores ao método de Duval. Destaca-se a configuração ANFIS 05
que obteve para alguns conjuntos de dados índices de precisão de 100%. Dessa forma,
os índices de acerto aumentaram com o incremento do número de regras. Outro fato
decorrente do aumento de regras é a diminuição da variabilidade dos índices de
precisão, ou seja, os sistemas tendem a convergir. A Tabela 4.4 indica os valores
médios e os desvios padrão da precisão para cada um dos sistemas estudados.
43
Tabela 4.4 – Precisão média para um Conjunto de 10 rodadas - Treinamento
Método
Média
Desvio Padrão
ANFIS 02
85,56
4,71
ANFIS 03
90,67
1,75
ANFIS 05
98,67
1,55
Duval
86,44
0,85
Fonte: autor.
Desse modo, as configurações ANFIS 03 e ANFIS 05, para o conjunto de
dados selecionados, obtiveram em média para as dez rodadas consideradas, índices de
acerto maiores que o método de Duval. O sistema de inferência ANFIS 02 obteve uma
média inferior. Observa-se também uma diminuição da variabilidade em sistemas de
maior acerto.
O mesmo procedimento de análise foi realizado com os dados oriundos da
validação. Os resultados obtidos foram reunidos na Tabela 4.5. Conforme esperado, os
índices de dos sistemas de inferência foram reduzidos, entretanto, a tendência observada
no treinamento foi um pouco modificada, de modo que os sistemas ANFIS 02 e ANFIS
03 passaram a ter acertos da mesma ordem que o Método de Duval e o sistema ANFIS
05 um resultado comparativamente superior.
Tabela 4.5 – Precisão por Rodada para a Validação
Método
ANFIS
1
2
3
4
5
6
7
8
9
10
80,00 73,33 66,67 86,67 80,00 86,67 73,33 86,67 86,67 80,00
02
ANFIS
80,00 80,00 93,33 80,00 73,33 93,33 73,33 86,67 80,00 73,33
03
ANFIS
93,33 93,33 93,33 80,00 86,67 73,33 93,33 100,0 93,33 93,33
05
DUVAL
73,33 86,67 100,0 80,00 86,67 93,33 86,67 86,67 93,33 80,00
Fonte: autor.
A Tabela 4.6 permite descrever de modo mais eficiente essa diferença entre os
sistemas. Enquanto os sistemas ANFIS 02 e ANFIS 03 apresentam um índice de acerto
44
médio da ordem de 80 %, o sistema ANFIS 05 possui uma precisão média para índices
da ordem de 90%, o que significa um aumento de precisão em relação ao método de
Duval, que é em torno de 87%.
Tabela 4.6 – Precisão média para um Conjunto de 10 rodadas - Validação
Método
Média
Desvio Padrão
ANFIS 02
80,00
7,03
ANFIS 03
81,33
7,56
ANFIS 05
90,00
7,86
DUVAL
86,67
7,69
Fonte: autor.
Os sistemas de inferência tiveram uma redução dos índices de eficiência da
ordem de 8 %, uma vez que o conjunto de dados para os quais foram apresentados era
distinto do conjunto de treinamento. Entretanto, essa redução não chega a comprometer
a capacidade de diagnóstico do sistema, indicando que a metodologia de validação é
adequada.
Com o objetivo de se ter um conhecimento mais amplo do método de
diagnóstico em análise e de suas diferentes configurações, um grande conjunto de
simulações foi realizado. Para cada ciclo de simulação, foi obtido o valor médio para as
dez rodadas. Esse valor representará o conjunto de matrizes de confusão desta
simulação. As Tabelas 4.7 e 4.8 mostram os valores médios e os desvios-padrão de
precisão obtidos para o conjunto total de simulações para o treinamento e para a
validação, respectivamente.
Para os sistemas de inferência ANFIS 02, ANFIS 03, ANFIS 05 e para o
método de Duval foram realizadas 100 simulações. Os resultados obtidos confirmam a
tendência observada anteriormente para dez rodadas.
Tabela 4.7 – Análise Estatística da Precisão – Treinamento
Método
Média
Desvio Padrão
ANFIS 02
86,68
4,25
ANFIS 03
88,46
3,64
ANFIS 05
96,42
1,79
DUVAL
84,68
2,74
Fonte: autor.
45
Tabela 4.8 – Análise Estatística da Precisão – Validação
Método
Média
Desvio Padrão
ANFIS 02
82,83
3,52
ANFIS 03
84,97
3,64
ANFIS 05
86,35
3,59
DUVAL
84,62
2,72
Fonte: autor.
O método de Duval, apesar de apresentar um valor de média elevado, possui
alguns índices de precisão abaixo de 80,00 %. As diferentes configurações do sistema
de inferência também apresentam valores abaixo desse patamar, entretanto, conforme
pode ser observado a partir de seus histogramas indicados na Figura 4.3, os casos em
que o índice chega a esse valor são muito reduzidos, da ordem de 10 % dos casos para o
sistema ANFIS 03 e de 12% para o sistema ANFIS 02. Na configuração ANFIS 05
esses casos acontecem numa proporção ainda menor que 10%.
O método de Duval também apresenta valores elevados de precisão, entretanto,
índices de acerto superiores a 90% acontecem para uma parcela inferior a 5% dos casos.
No sistema ANFIS 03 esses casos correspondem a 13% do total.
Figura 4.3 – Histograma dos índices de precisão – Validação
(a) Método de Duval
140
130
120
Número de Ocorrências
110
100
90
80
70
60
50
40
30
20
10
0
0.7
0.72
0.74
0.76
0.78
0.8
0.82
Precisão
0.84
0.86
0.88
0.9
0.92
0.94
46
(b) ANFIS 03
140
130
120
Número de Ocorrências
110
100
90
80
70
60
50
40
30
20
10
0
0.7
0.72
0.74
0.76
0.78
0.8
0.82
0.84
0.86
0.88
0.9
0.92
0.94
0.86
0.88
0.9
0.92
0.94
Precisão
(c) ANFIS 05
25
Número de Ocorrências
20
15
10
5
0
0.7
0.72
0.74
0.76
0.78
0.8
0.82
0.84
Precisão
Fonte: autor.
47
4.5 Matrizes de Confusão
O índice de precisão indica como o sistema de classificação acerta os
diagnósticos de uma maneira global, entretanto é importante visualizar as matrizes de
confusão para se conhecer onde o sistema está errando, com isso, determinam-se quais
os diagnósticos mais problemáticos. Para realizar esta análise serão comparadas as
matrizes de confusão de menor e de maior precisão para cada uma dos sistemas de
inferência em estudo, na seguinte ordem ANFIS 02, ANFIS 03 e ANFIS 05 tanto para o
treinamento quanto para a validação. Por fim, é feita uma análise semelhante para o
método de Duval.
Os valores máximos e mínimos foram selecionados com base nas Tabelas 4.7 e
4.8, levando em conta uma margem de 2%, uma vez que os valores indicados nesta
tabela correspondem à média das rodadas e as matrizes de confusão a serem analisadas
correspondem à apenas uma rodada tornando inviável a obtenção de certos valores em
especial os índices de acerto para o teste.
As matrizes de confusão de treinamento possuem um total de 135 elementos,
sendo 27 elementos para cada categoria. As matrizes de confusão de validação possuem
um total de 15 elementos, onde a cada categoria correspondem 3 elementos.
No diagnóstico de falhas em transformadores sob análise neste trabalho são
consideradas cinco classes rotuladas conforme estabelecido pela IEC 6059, englobando
três falhas elétricas e três falhas térmicas, conforme indicado na Tabela 4.9.
Tabela 4.9 – Classes de Diagnóstico consideradas
Rótulo
Número Associado
Descrição da Falha
T1/T2
1
falha térmica para temperaturas abaixo de 700ºC;
T3
2
falha térmica para temperaturas acima de 700ºC;
PD
3
descargas elétricas parciais;
D1
4
descargas elétricas de baixa energia
D2
5
descargas elétricas de alta energia
Fonte: autor.
48
Tabela 4.10 - Matriz de Confusão de Treinamento – ANFIS 02 – Menor
Precisão
T1/T2
T3
DP
D1
D2
T1/T2
15
12
0
0
0
T3
1
23
3
0
0
DP
0
6
21
0
0
D1
0
1
2
12
12
D2
0
0
0
6
21
Fonte: autor.
Tabela 4.11 - Matriz de Confusão de Treinamento – ANFIS 02 – Maior Precisão
T1/T2
T3
DP
D1
D2
T1/T2
18
9
0
0
0
T3
1
25
1
0
0
DP
0
0
27
0
0
D1
0
0
0
26
1
D2
0
0
0
0
27
Fonte: autor.
A partir da matriz de confusão com a menor eficiência observa-se que as
categorias de falhas com menores índices de acerto são T1/T2, T3 e D1. No sistema
com maior índice de acerto obtido, as falhas do tipo T1/T2 e D1 persistem como as que
possuem os menores índices de acerto relativamente ao conjunto de diagnósticos
considerados. A figura 4.4 mostra a comparação entre os índices de acerto para cada
uma das categorias para os sistemas menos e mais precisos.
Figura 4.4 – Índice de acerto por tipo de falha – Treinamento – ANFIS02
T1/T2
T3
PD
D1
D2
120,0
100,0
80,0
60,0
40,0
20,0
85,2
55,6
77,8
77,8
44,4
66,7
92,6
100,0
96,3
0,0
Menor Precisão
Maior Precisão
Fonte: autor.
100,0
49
Tabela 4.12 Matriz de Confusão de Validação – ANFIS 02 – Menor Precisão
T1/T2
T3
DP
D1
D2
T1/T2
1
2
0
0
0
T3
1
2
0
0
0
DP
0
0
3
0
0
D1
0
0
0
2
1
D2
0
0
0
1
2
Fonte: autor.
Tabela 4.13 Matriz de Confusão de Validação – ANFIS 02 – Maior Precisão
T1/T2
T3
DP
D1
D2
T1/T2
2
1
0
0
0
T3
0
3
0
0
0
DP
0
0
3
0
0
D1
0
0
0
3
0
D2
0
0
0
1
2
Fonte: autor.
No sistema de inferência com menor precisão o sistema possui um erro
significativo em relação à classe T1/T2, pois o sistema de diagnóstico se engana mais
do que acerta. Todas as outras categorias que apresentaram desempenho ruim na
categoria para menor precisão obtiveram resultados melhores no sistema de maior
precisão. Comparando os resultados do treinamento e de validação os dados mostram
que a classe T1/T2 apresenta os maiores erros de diagnóstico. A segunda pior classe
quanto ao critério de precisão é a D1.
Figura 4.5 – Índice de acerto por tipo de falha – Validação – ANFIS02
T1/T2
120,0
100,0
80,0
60,0
40,0
20,0
0,0
T3
PD
D1
D2
100,0
66,7
100,0 100,0 100,0
66,7
66,7
66,7
66,7
33,3
Menor Precisão
Fonte: autor.
Maior Precisão
50
Tabela 4.14 Matriz de Confusão de Treinamento – ANFIS 03 – Menor Precisão
T1/T2
T3
DP
D1
D2
T1/T2
12
13
2
0
0
T3
1
26
0
0
0
DP
0
3
24
0
0
D1
0
1
5
13
8
D2
0
0
0
3
24
Tabela 4.15 Matriz de Confusão de Treinamento – ANFIS 03 – Maior Precisão
T1/T2
T3
DP
D1
D2
T1/T2
21
5
1
0
0
T3
1
26
0
0
0
DP
0
0
27
0
0
D1
0
0
1
25
1
D2
0
0
0
0
27
Os índices de acerto do diagnóstico seguem o padrão mostrado no sistema
ANFIS 02, ou seja, no treinamento e na validação a classe T1/T2 apresenta o menor
valor entre o conjunto de classes. A classe D1 também esta tendência, embora seus
índices sejam baixos, eles obtiveram uma leve melhora em relação ao ANFIS 02.
Observa-se também a melhora em relação ao diagnóstico de falha T3, que passou de
índices da ordem de 85% no ANFIS 02 para 96,3 %. Ou seja, o aumento de funções de
pertinências permitiu inferir melhores regras em relação a partir do conjunto de dados
de treinamento.
Figura 4.6 – Índice de acerto por tipo de falha – Treinamento – ANFIS03
T1/T2
120,0
100,0
80,0
60,0
40,0
20,0
0,0
96,3
44,4
T3
PD
D1
88,9
D2
88,9
77,8
96,3
100,0
92,6
48,1
Menor Precisão
Fonte: autor.
Maior Precisão
100,0
51
Tabela 4.16 - Matriz de Confusão de Validação – ANFIS 03 – Menor Precisão
T1/T2
T3
DP
D1
D2
T1/T2
1
2
0
0
0
T3
0
3
0
0
0
DP
0
0
3
0
0
D1
0
0
2
1
D2
0
0
1
2
0
Fonte: autor.
Tabela 4.17 - Matriz de Confusão de Validação – ANFIS 03 – Maior Precisão
T1/T2
T3
DP
D1
D2
T1/T2
2
1
0
0
0
T3
0
3
0
0
0
DP
0
0
3
0
0
D1
0
0
0
3
0
D2
0
0
0
0
3
Fonte: autor.
Os índices de acerto para a situação de menor eficiência da configuração
ANFIS 03 têm uma distribuição melhor em relação ao ANFIS 02, uma vez que a
precisão de diagnósticos da classe T3 aumentou. Esse aumento é decorrência do
aumento de acertos da categoria durante o treinamento. Na situação de maior precisão,
os índices de acerto também melhoraram em relação ao ANFIS 02, em função do
aumento de acertos de diagnósticos D2. Apesar da melhoria dos índices de precisão
durante o treinamento, a classe T1/T2 persiste como a categoria com os piores índices.
Figura 4.7 – Índice de acerto por tipo de falha – Validação – ANFIS03
T1/T2
120,0
100,0
80,0
60,0
40,0
20,0
0,0
T3
PD
D1
D2
100,0 100,0
100,0 100,0 100,0 100,0
66,7
66,7
66,7
33,3
Menor Precisão
Fonte: autor
Maior Precisão
52
Tabela 4.18 Matriz de Confusão do Treinamento – ANFIS 05 – Menor Precisão
T1/T2
T3
DP
D1
D2
T1/T2
23
2
2
0
0
T3
0
27
0
0
0
DP
0
3
24
0
0
D1
0
0
1
26
0
D2
0
0
0
0
27
Fonte: autor.
Tabela 4.19 Matriz de Confusão do Treinamento – ANFIS 05 – Maior Precisão
T1/T2
T3
DP
D1
D2
T1/T2
25
1
1
0
0
T3
0
27
0
0
0
DP
0
0
27
0
0
D1
0
0
0
27
0
D2
0
0
0
0
27
Fonte: autor.
O sistema ANFIS 05 obtém resultados superiores em relação aos outros
sistemas de inferência, com melhoras significativas nos índices de acerto em todas as
categorias. O sistema conseguiu adequar seus parâmetros de modo a aumentar o índice
de acertos da categoria T1/T2 de forma acentuada em relação ao melhor resultado
obtido anteriormente, entretanto não foi capaz de acertar todos os casos mesmo na
situação de maior precisão. Apesar de não conseguir diagnosticar todos os casos T1/T2,
o sistema conseguiu melhorar a classificação das falhas D1, outro importante empecilho
verificado nas configurações anteriores, com o índice indo de 48,1% para 96,3% na
situação menos precisa.
Figura 4.8 – Índice de acerto por tipo de falha – Treinamento – ANFIS05
T1/T2
120,0
100,0
80,0
60,0
40,0
20,0
0,0
85,2
T3
100,0
PD
88,9
D1
96,3
D2
100,0
Menor Precisão
Fonte: autor.
92,6
100,0 100,0 100,0 100,0
Maior Precisão
53
Tabela 4.20 - Matriz de Confusão de Validação – ANFIS 05 – Menor Precisão
T1/T2
T3
DP
D1
D2
T1/T2
2
1
0
0
0
T3
0
3
0
0
0
DP
0
1
2
0
0
D1
0
0
0
2
1
D2
0
0
0
1
2
Fonte: autor
Tabela 4.21 - Matriz de Confusão de Validação – ANFIS 05 – Maior Precisão
T1/T2
T3
DP
D1
D2
T1/T2
2
1
0
0
0
T3
0
3
0
0
0
DP
0
0
3
0
0
D1
0
0
0
3
0
D2
0
0
0
0
3
Os resultados obtidos na validação confirmam a hipótese levantada na análise
dos índices de precisão de treinamento. O sistema de inferência, para o conjunto de
dados considerado, mostra-se incapaz de diagnosticar de forma completa os casos de
falha do tipo T1/T2. Os resultados obtidos indicam que as falhas do tipo T1/T2
confundem-se mais comumente com as falhas do tipo T3. Este comportamento foi
observado repetidamente na diferentes configurações dos sistemas de inferência. E em
muitas situações, a recíproca também acontece, ou seja, falhas do tipo T3 são
classificadas como T1/T2, porém no ANFIS 05 esse tipo de falha ocorre com frequência
muito menor.
Figura 4.9 – Índice de acerto por tipo de falha – Validação – ANFIS05
T1/T2
120,0
100,0
80,0
60,0
40,0
20,0
0,0
T3
PD
D1
100,0 100,0
66,7
D2
100,0
66,7
Menor Precisão
Fonte: autor.
100,0 100,0 100,0 100,0
66,7
Maior Precisão
54
A seguir, discutem-se os resultados obtidos para o método de Duval
Tabela 4.22 Matriz de Confusão do Treinamento – DUVAL – Menor Precisão
T1/T2
T3
DP
D1
D2
T1/T2
15
5
7
0
0
T3
5
22
0
0
0
DP
2
1
23
1
0
D1
0
2
0
18
7
D2
0
0
0
2
25
Fonte: autor.
Tabela 4.23 Matriz de Confusão do Treinamento – DUVAL – Maior Precisão
T1/T2
T3
DP
D1
D2
T1/T2
26
1
0
0
0
T3
3
24
0
0
0
DP
1
1
24
1
0
D1
0
0
0
24
3
D2
0
0
0
1
26
Fonte: autor.
Na situação de menor precisão, os diagnósticos que mais erraram foram os
T1/T2 e D1. O sistema de inferência com diferentes configurações confundiu-se com
maior intensidade também em relação a esse conjunto de classes. Entretanto, o sistema
de inferência ANFIS 05 mostrou-se mais eficiente para o diagnóstico dos casos T1/T2
em comparação ao método de Duval.
Figura 4.10 – Índice de acerto por tipo de falha – Treinamento – Duval
T1/T2
120,0
100,0
80,0
60,0
40,0
20,0
0,0
55,6
81,5
T3
85,2
PD
D1
66,7
D2
92,6
Menor Precisão
Fonte: autor.
96,3
88,9
88,9
88,9
Maior Precisão
96,3
55
Tabela 4.24 Matriz de Confusão da Validação –DUVAL – Menor Precisão
T1/T2
T3
DP
D1
D2
T1/T2
2
0
1
0
0
T3
1
2
0
0
0
DP
0
0
2
0
0
D1
0
0
0
2
1
D2
0
0
0
0
3
Fonte: autor.
Tabela 4.25 Matriz de Confusão da Validação – DUVAL– Maior Precisão
T1/T2
T3
DP
D1
D2
T1/T2
2
1
0
0
0
T3
0
3
0
0
0
DP
0
0
3
0
0
D1
0
0
0
3
0
D2
0
0
0
0
3
Fonte: autor.
Os índices de acerto na validação confirmam o comportamento observado no
treinamento, destaca-se nesse caso a distribuição mais uniforme de enganos entre as
diferentes categorias. Enquanto o diagnóstico de T1/T2 é o mais problemático, a classe
D2 consegue ser identificada sem grandes dificuldades em grande parte das situações
analisadas para esta base de dados.
Figura 4.11 – Índice de acerto por tipo de falha – Validação – Duval
T1/T2
120,0
100,0
80,0
60,0
40,0
20,0
0,0
T3
PD
D1
D2
100,0
66,7
66,7
66,7
66,7
Menor Precisão
Fonte: autor.
100,0 100,0 100,0 100,0
66,7
Maior Precisão
56
4.6 Análise da Sensibilidade ao Erro
Nesta seção será feita uma análise do efeito da adição de erros às medidas.
Esses erros serão números aleatórios de distribuição normais com desvios padrão iguais
a 15% e 65%. O conjunto de dados resultantes é obtido com base na Equação (4.3).
onde
corresponde à amostra com erros de medida,
corresponde ao
valor da amostra obtido nos bancos de dados das referências e
é um número aleatório
de distribuição normal com desvio padrão de 15% ou 65%
Os sistemas de inferência foram simulados mantendo as configurações
descritas anteriormente, sendo realizadas para os sistemas ANFIS 02, ANFIS 03,
ANFIS05e método de Duval um total de 100 simulações. Os resultados obtidos foram
reunidos nas Tabelas 4.26 e 4.27.
Tabela 4.26 – Análise da Adição de Erro às Medidas – Treinamento
Método
Sem Erro
Erro com 15 %
Erro com 65 %
ANFIS 02
86,68
85,59
80,37
ANFIS 03
88,46
87,34
81,68
ANFIS 05
96,42
95,18
89,75
Duval
84,68
72,25
67,18
Fonte: autor.
Tabela 4.27 – Análise da Adição de Erro às Medidas – Validação
Método
Sem Erro
Erro com 15 %
Erro com 65 %
ANFIS 02
82,83
81,54
75,32
ANFIS 03
84,97
83,28
77,24
ANFIS 05
86,35
86,02
79,78
Duval
84,62
72,22
67,13
Fonte: autor.
57
Os resultados obtidos indicam que os sistemas de inferência respondem de
modo mais adequado à adição de erros nas medidas que o método de Duval. Os
sistemas de inferência mostram-se menos sensíveis ao ruído. Quando erros com desvio
padrão de 15% são adicionados às medidas, o método de Duval sofre reduções em sua
precisão da ordem de 10% e os sistemas de inferências sofrem reduções inferiores a 5%.
Quando ruídos ainda maiores são adicionados ao sistema, a precisão do método de
Duval é reduzida para valores em torno de 70%. Os sistemas neuro-difusos ANFIS 02 e
ANFIS 03 têm sua precisão reduzida para valores em torno de 75 % enquanto o ANFIS
05 mantém um índice de acertos da ordem de 80%.
Esse comportamento é inerente aos sistemas difusos, uma vez que a lógica
difusa busca modelar as informações imprecisas e incertas. Ou seja, o sistema ANFIS
aprendeu a partir do conjunto de dados fornecido pelos especialistas e conseguiu
realizar generalizações.
4.7 Exemplos de diagnóstico para casos críticos
Este tópico faz uma análise dos erros cometidos pelo método de Duval que
conseguem ser corrigidos pelo ANFIS 02. Ao simular o método de Duval para o
conjunto de dados submetidos a um erro com desvio padrão de 15%, conforme descrito
na seção anterior, a matriz de confusão formada a partir da validação resultante é
mostrada na Tabela 4.28.
Tabela 4.28 – Matriz de Confusão para o método de Duval
T1/T2
T3
DP
D1
D2
T1/T2
2
0
1
0
0
T3
1
2
0
0
0
DP
0
0
2
1
0
D1
0
0
0
3
0
D2
0
0
0
1
2
Fonte: autor
Utilizando o mesmo conjunto de dados para treinar e validar o ANFIS 02, é
obtida a matriz de confusão mostrada na Tabela 4.29.
58
Tabela 4.29 – Matriz de Confusão para o ANFIS 02
T1/T2
T3
DP
D1
D2
T1/T2
2
1
0
0
0
T3
0
3
0
0
0
DP
0
0
3
0
0
D1
0
0
0
3
0
D2
0
0
0
1
2
Fonte: autor
Os resultados indicam uma melhoria no diagnóstico das falhas T3 e PD do
ANFIS 02 em relação ao método de Duval. Os resultados obtidos mostram que o
ANFIS 02 seguiu o mesmo comportamento descrito para amostras sem erro. A Tabela
4.30 mostra os casos para os quais o ANFIS 02 acertou o diagnóstico enquanto o Duval
comete um engano.
Tabela 4.30 – Amostra com diagnóstico incorreto
Caso
%CH4
%C2H2
%C2H4
Diagnóstico
Diagnóstico
Diagnóstico
Especialistas
Duval
ANFIS 02
A1
49,07
0,99
49,94
T3
T2
T3
A2
96,46
1,76
1,78
PD
D1
PD
Fonte: autor
Esses dados ficam em regiões do triângulo de Duval muito próximas dos
limites dos tipos de defeito, isto é, das fronteiras entre as falhas. Essa proximidade torna
o diagnóstico suscetível a falhas, uma vez que o método de Duval considera limites
precisos para o diagnóstico.
Conforme indicado na Figura 4.12, caso A1 está no limiar entre os defeitos
térmicos T2 e T3. O método de Duval considera que este conjunto de dados indica uma
falha do tipo T2, uma vez que o percentual de C2 H4 está abaixo de 50%. O ANFIS 02
conseguiu diagnosticar corretamente a falha, pois é baseado na lógica difusa, ou seja,
lida com imprecisões de modo mais eficiente. Isso acontece, pois o ANFIS 02 possui
duas funções de pertinência para codificar as informações de entrada, uma função
classifica a concentração com baixa e a outra classifica as concentrações como alta
59
Figura 4.12 – Triângulo de Duval com o caso A1 em destaque
Fonte: autor
A Figura 4.13 mostra as funções de pertinência da entrada do ANFIS 02 para o
acetileno. Assim, em vez de considerar simplesmente uma concentração de C 2H4 acima
ou abaixo de 50%, o ANFIS considera o quanto essa concentração está baixa ou alta,ou
seja, a concentração de C2H4 igual a 49,94% foi considerada pelo ANFIS 02 um forte
indicativo de falha térmica T3.
Figura 4.13 – Funções de pertinência para a entrada %C2H4
1
0.9
0.8
0.7
0.6
BAIXA
ALT A
0.5
0.4
0.3
0.2
0.1
0
0
10
20
30
40
50
60
Fonte: autor
70
80
90
100
60
A segunda amostra em análise também ilustra como os limiares rígidos
estabelecidos pelo método de Duval levam a diagnósticos incorretos. Nesta amostra, a
concentração de CH4 é igual a 96,85%, um valor inferior ao estabelecido pelo método
de Duval, com isso ela não é diagnosticada com uma falha de descarga elétrica parcial,
mas sim como uma descarga elétrica do tipo D1. Entretanto, esse valor está muito
próximo do limiar de 98%. Assim o ANFIS infere que este percentual de metano está
relacionado à falha do tipo PD. A técnica foi capaz de inferir o diagnóstico correto a
partir do conhecimento de especialistas fornecidos por meio dos dados treinamento.
Figura 4.14 – Triângulo de Duval com o caso A2 em destaque
Fonte: autor
4.8 Considerações parciais
O conjunto de simulações realizadas forneceu uma série de informações
relevantes acerca do diagnóstico de falhas utilizando ANFIS. Os resultados de
simulação mostram que os melhores resultados foram obtidos para o sistema ANFIS
com cinco variáveis linguísticas, com índice de precisão em torno de 90%. Os sistemas
com duas e três variáveis linguísticas tiveram resultados da mesma ordem de grandeza
que o método convencional de Duval, em torno de 85%.
O ANFIS demonstrou ser uma técnica de diagnóstico eficaz diante da presença
de erros nos dados de treinamento e validação, mostrando que, para o conjunto de dados
61
considerados, foi capaz de modelar adequadamente o complexo processo de formação
de gases a partir de falhas elétricas e térmicas no interior de transformadores isolados a
óleo. Para erros adicionados na base de dados com desvios padrão de 15% e 65%, os
índices de precisão permanecem praticamente estáveis, enquanto o método
convencional tem sua precisão reduzida para 70%.
A última análise realizada comparou o diagnóstico feito pelo método de Duval
com o diagnóstico realizado pelo ANFIS 02 para dois casos críticos. Os resultados
obtidos mostram a capacidade do ANFIS em lidar com imprecisões.
62
5 CONCLUSÕES
Neste trabalho foi desenvolvida e implementada uma técnica eficiente e
confiável de diagnóstico de falhas incipientes em transformadores de potência isolados
a óleo. A técnica em estudo utiliza o sistema neuro-difuso ANFIS baseado em padrões
convencionais de identificação de falhas em transformadores com o intuito de estender a
sua capacidade de diagnóstico.
A técnica de diagnóstico baseada no ANFIS foi comparada com a metodologia
clássica denominada Triângulo de Duval, que apresenta os melhores resultados entre os
métodos convencionais, conforme discutido em (AMORA, 2013). O ANFIS em suas
diferentes configurações obteve índices de precisão iguais ou superiores aos obtidos
pelo método de Duval. A melhor configuração do ANFIS foi obtida com cinco variáveis
linguísticas. Nessa configuração, a precisão média foi de 90%. Para o mesmo conjunto
de dados, o método de Duval obteve uma precisão média de 85%, valores da mesma
ordem foram obtidos para o ANFIS com duas e três variáveis linguísticas.
Neste trabalho também foram considerados os efeitos de erros de medidas nos
diagnósticos. O método de Duval obteve uma piora significativa, reduzindo sua precisão
média para menos de 70% na situação de maior erro associado às medidas. Por outro
lado, o ANFIS manteve índices de acerto superiores em todas as configurações
estudadas. O melhor resultado foi obtido, novamente, para o sistema com cinco
variáveis linguísticas, que obteve uma precisão média em torno de 80%.
O conjunto de resultados obtido mostra um dilema entre complexidade e
precisão de diagnóstico. O ANFIS com cinco variáveis linguísticas obtém índices de
precisão superiores, porém requer maiores tempos de simulação e seu conjunto de
regras é mais difícil de ser interpretado.
A última análise realizada indica como a configuração ANFIS mais simples
realiza diagnósticos em regiões limítrofes de tipos de falhas. Os casos estudados são
exemplos de situações críticas em que o método de aprendizagem adaptativa conseguiu
inferir o diagnóstico correto a partir de um conjunto de informações imprecisas.
Portanto, o uso da lógica difusa combinada a redes neurais mostrou-se
apropriado para o diagnóstico de falhas, pois estas técnicas fornecem ferramentas para
modelar o sistema de maneira simplificada e eficiente, permitindo a obtenção de
diagnósticos que não seriam possíveis com as técnicas convencionais.
63
REFERÊNCIAS
ABNT NBR 7274: Interpretação da Análise dos Gases de Transformadores em
Serviço. Rio de Janeiro, 1982.
AMORA, M. A. B. Extração de regras interpretáveis para o diagnóstico eficiente
de transformadores de potência isolados a óleo a partir do aumento de espaço de
atributos. Tese (Doutorado em Engenharia Elétrica) – Centro de Tecnologia.
Universidade Federal do Ceará, Fortaleza, 2013.
AZAR, Ahmed Taher. Fuzzy Systems.1.Ed. Croatia: Intech, 2010.
ARANTES, J.G. Diagnóstico de falhas em transformadores de potência pela análise
de gases dissolvidos em óleo isolante através de redes neurais. Dissertação
(Mestrado em Ciências) – Universidade Federal de Itajubá, Itajubá, 2005.
BARBOSA, F. R. Diagnóstico de falhas incipientes a partir das propriedades físicoquímicas do óleo isolante em transformadores de potência como método
alternativo à análise de gases dissolvidos. Tese (Doutorado em Engenharia Elétrica) –
Centro de Tecnologia. Universidade Federal do Ceará, Fortaleza, 2013.
BECHARA, R. Análise de falhas em transformadores de potência. Dissertação
(Mestrado em Engenharia Elétrica) – Escola Politécnica, Universidade de São Paulo,
São Paulo, 2010.
BROWN, R. E. Electric Power Distribution Reability. 1Ed. New York. Marcel
Dekker, 2002.
CASTILLO, E.V. Aplicação de ontologia e sistema especialista para diagnóstico de
falhas em transformadores de potência. Dissertação (Mestrado em Engenharia
Elétrica) – Universidade Federal de Santa Catarina, Florianópolis, 2003.
DUVAL, Michel.A review of faults detectable by gas – in – oil analysis in
transformers.IEEE Electrical Insulation Magazine.Vol. 18.No. 3. May/June 2002
DUVAL, M.; DEPABLO, A. Interpretation of gas – in-oil analysis using new
IEC publication 60599 and IEC TC 10 Databases. IEEE ElectricalInsulation
Magazine, Vol. 17, Nº 2. March/April 2001.
GOMEZ, N.A.G. Diagnóstico de falhas em transformadores isolados com óleo
vegetal isolante a partir da análise de gases dissolvidos. Dissertação (Mestrado em
Engenharia dos Materiais) – Setor de Tecnologia. Universidade Federal do Paraná,
Curitiba, 2013.
HELL, M.B. Sistemas de diagnóstico de faltas em transformadores de potência
utilizando análise de gases dissolvidos e técnicas de inteligência computacional.
Dissertação (Mestrado em Engenharia Elétrica) – Universidade Católica de Minas
Gerais, Belo Horizonte, 2002.
64
IEC Mineral Oil-Impregnated Electrical Equipment in Service – Guide to the
Interpretation of Dissolved and Free Gases Analysis, IEC 60599 – 2008.
IEEE Guide for the Interpretation of Gases Generated in Oil-Immersed
Transformers, IEEE Standard C57.104-2008.
JANG, J. S. R. ANFIS: Adaptive –Network – based Fuzzy Inference Systems, IEEE
Transactions on Systems, Man and Cybernetics, Vol. 23, No. 3, 1993.
KOHAVI, R. A study of cross-validation and bootstrap for accuracy estimation and
nodelselection.International Joint Conferenceon Artificial Inteligence, pp 1137-1143,
1995
MATHWORKS, Fuzzy logic toolbox user’sguide.Mathworks Inc. 2013.
MORAIS, D.R. Ferramenta inteligente para detecção de falhas incipientes em
transformadores baseada na análise de gases dissolvidos no óleo isolante.
Dissertação (Mestrado em Engenharia Elétrica) – Universidade Federal de Santa
Catarina, Florianópolis, 2004.
NARESH, R.; SHARMA, V.; VASHISTH, M.An integrated neural fuzzy approach
for fault diagnosis of transformers. IEEE Transactions on Power Delivery.Vol.
23.No. 4.pp. 2017-2024. October 2008.
NEGNEVITSKY, M. Artificial intelligence.A guide to intelligent systems.2. Ed.
England: Addison Wesley, 2005.
NOGUEIRA, C.A.A. Avaliação de sistemas de medição da concentração de
hidrogênio dissolvido em óleo isolante. Dissertação (Mestrado em Metrologia) –
Universidade Federal de Santa Catarina, Florianópolis, 2004.
ROSS, T. J. Fuzzy logic with engineering applications.3.Ed. United Kingdom: Wiley,
2010.
SENNA, S.L. Computação evolucionária aplicada ao diagnóstico de falhas
incipientes em transformadores de potência utilizando dados de cromatografia.
Dissertação (Mestrado em Engenharia Elétrica). Universidade Federal de Minas Gerais,
Belo Horizonte, 2010.
SINGH, S. Bandyopadhyay, M.N. Duval triangle: a noble technique for DGA in
Power transformers. International Journal of Electrical and Power Engineering. 2010.
SIVANANDAM, S.N; SUMATHI, S.; DEEPA, S.N. Introduction to fuzzy logic using
Matlab. 1. Ed. Germany: Springer, 2007.
ZADEH, L.A. From computing with numbers to computing with words – from
manipulation of measurements to manipulations of perceptions.IEEE Transactions
on Circuits and Systems.Vol 45.No.1. 1999.
65
ZADEH, L.A. The concept of a linguistic variable and its application to
approximate reasoning.InformationSciences.No.8, 1975.
ZIRBES, R.; ROLIM, J. G.; e ZÜRN, H. H. Metodologias para avaliação e
diagnóstico do estado de isolamentos de papel impregnado com óleo mineral.
Revista Controle & Automação, Vol. 16, No 3, PP.318-330. Julho/Agosto/Setembro
2005.
Baixar