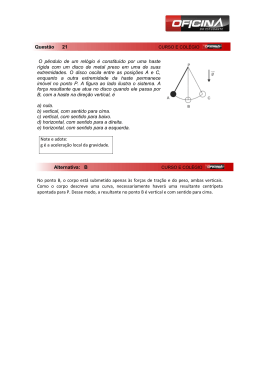
www.fisicaexe.com.br Uma haste tem seu movimento limitado à vertical (para cima e para baixo), esta haste está apoiada num plano inclinado formado por uma cunha de um ângulo α que desliza livremente sobre uma superfície horizontal, conforme figura ao lado. A razão entre a massa da cunha pela massa da haste é igual a r. Determinar as acelerações da haste e do plano inclinado. Desprezam-se todos os atritos. Dados do problema • • razão entre as massas da cunha e da haste ângulo do plano inclinado: r; α Esquema do problema O movimento da haste está limitado à direção vertical, o peso da haste ( P A ) produz uma ação na cunha ( N ), esta possui uma componente na direção horizontal com sentido para a direita ( N x ). Como não há atritos a cunha deslizará para a direita com aceleração a B e a haste descerá sob a ação do seu próprio peso com aceleração a A . Isolando os corpos e pesquisando as forças em cada um deles, temos figura 1 Haste (figura 2-A): P A : força peso da haste; N : reação do contato com o plano inclinado; N PD : reação do contato com a parede direita; N PE : reação do contato com a parede esquerda. figura 2 Pela figura 2-B vemos que a força de reação do plano na haste forma um ângulo α com a vertical. Cunha (figura 3-A): P B : força peso da cunha; N : ação de contato haste; 1 www.fisicaexe.com.br N C : reação do contato com chão; figura 3 Pela figura 3-B vemos que a força de reação da haste no plano forma um ângulo α com a vertical. Solução Desenhando as forças que agem nos corpos num sistema de eixos coordenados e aplicando a 2.ª Lei de Newton F = ma (I) Para a haste (figura 2-C), obtemos NN PDN PEP A = m a A onde N = −N sen iN cos j ; N PD = −N PD i ; N PE = N PE i; P A = −m A g j ; a A = m AaA j assim −N sen iN cos j−N PD iN PE i−m A g j = m A a A j (II) Separando as componentes da expressão (II), temos −N sen −N PDN PE = 0 N cos−m A g = m A a A Aplicando a expressão (I) para a cunha (figura 3-C), obtemos NN CP B = m a B onde N = N sen i−N cos j ; N C = N C j; P B = −m B g j ; aB = mBaBi 2 (III) (IV) www.fisicaexe.com.br assim N sen i−N cos j−N C j−m B g j = m B a B i (V) Separando as componentes da expressão (V), temos N sen = m B a B −N cos −N C−m B g = 0 (VI) (VII) As expressões (IV) e (VI) forma um sistema de dua equações a três incógnitas (N, a A e a B – as massas m A e m B também não são conhecidas, mas o problema fornece a razão das massas r.) ∣ N cos −m A g = m A a A N sen = m B a B (VIII) (IX) Este sistema possui mais incógnitas do que equações, é uma sistema impossível, mas a partir da Cinemática podemos encontrar uma relação entre as duas acelerações. figura 4 Considerando um ponto B 1 no plano inclinado da cunha e um ponto A 1 no ponto de contato da haste com a cunha num instante inicial (figura 4-A), escrevemos as funções horárias do Movimento Retilíneo Uniformemente Variado (M.R.U.V.) para a haste e para a cunha, vamos adotar que neste instante as velocidades iniciais dos corpos são nulas ( v A0 = v B0 = 0 ), temos aB 2 t 2 aB 2 x −x 0 = 0 t t 2 aB 2 Δx = t 2 2Δ x 2 t = aB x = x 0v B0 t aA 2 t 2 aA 2 y− y 0 = 0 t t 2 aA 2 Δy = t 2 2Δ y t2 = aA y = y 0v A0 t e O tempo que um ponto da cunha vai levar para se deslocar de B 1 até B 2 será o mesmo intervalo de tempo que um ponto da haste vai levar para se deslocar de A 1 até A 2, podemos igualar os tempos nas expressões acima (na verdade igualar o quadrado dos tempos) 2 Δx 2Δ y = aB aA Δy aA = aB Δx Pela figura 4-B podemos relacionar os deslocamentos Δ x e Δ y pelo ângulo α 3 www.fisicaexe.com.br Δ x = S cos Δ y = S sen e substituindo este valores, obtemos S sen S cos a A = −a B tg a A = aB (X) o sinal de negativo foi colocado porque a aceleração da haste está no sentido contrário do referencial adotado (para cima). Da expressão (IX), temos N= m Ba B sen (XI) substituindo (X) e (XI) em (VIII), obtemos m Ba B cos −m A g = −m A a b tg sen mBaB −m A g = −m A a b tg tg mBaB m A a b tg = m A g tg dividindo toda a expressão por m A e lembrando que a razão das massas é r = m Ba B m A a b tg = m A g tg mB aB mA mA a tg = g m A tg m A b mA aB r a b tg = g tg 1 aB r tg = g tg r tg 2 aB =g tg aB = g tg 2 r tg substituindo este resultado na expressão (X) 2 aA=− g tg 2 r tg 4 : m A mB , fica mA
Baixar