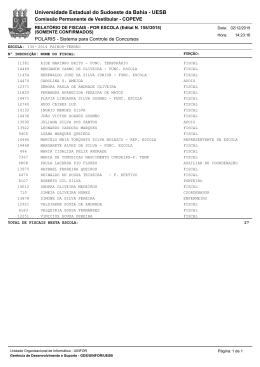
10 1 100 101 102 103 104 105 2:0 Tempo de Estabelecimento do Sistema Sub-amortecido de 2a Ordem sem Zeros 1:5 1:0 0:8 0:6 Seja 0:5 ωn2 0:4 H(s) = , (1) 0:2 s2 + 2ξωn s + ωn2 0:0 com 0 ≤ ξ < 1 a0:01 função de transferência de um SLIT sub-amortecido de 2a ordem sem zeros. 0:02 A resposta no 0:04tempo à entrada escalão unitário do sistema (1) é: " # 0:06 0:08y(t) = 1 − p 1 e−ξωn t sin ω p1 − ξ 2 t + Ψ u (t) , (2) −1 n 0:1 1 − ξ2 em que Ψ = arctan p 1 − ξ2 . ξ O tempo de estabelecimento definido para a vizinhança de ±5 % do valor final da resposta, ts , representa o menor instante de tempo para o qual a condição ts 1:0 |y(+∞) − y(t)| ≤ 0.05 |y(+∞)| , ∀t ≥ ts (3) 1:1 1:5 é satisfeita. O tempo de estabelecimento pode ser medido em função da constante de tempo 2:0 3 5T 4 T = !1 4T n 2 3T 4 2 2T T0:2 0:3 0:4 0:5 0:6 0:7 0:8 0:9 1:0 Figure 1: Tempo de estabelecimento, em função de ξ para o sistema sub-amortecido. T = 1/ξωn , como se representa na Figura 1. Note-se que o tempo de estabelecimento atinge um mı́nimo absoluto para ξ ≃ 0.7, crescendo quase linearmente para valores mais elevados de ξ. Para 0 < ξ < 0.7, ts é aproximadamente três vezes a constante de tempo T . Para estabelecer este resultado, que é claramente observado na Figura 1, defina-se a função ∆y(t) = |y(+∞) − y(t)| |y(+∞)| que representa o desvio relativo de y(t) em relação ao valor final da resposta à entrada escalão unitário. Determinando este desvio para os instantes de máximo e de mı́nimo da resposta y(t), i.e., particularizando (2) para os instantes tn ≃ obtém-se ∆y(tn ) = nπ , n∈N , ωa |y(+∞) − y(tn )| = e−ξωn tn . |y(+∞)| A expressão anterior mostra que, para os instantes de máximo e de mı́nimo da função y(t), instantes tn , o desvio relativo ∆y(tn ) evolui segundo a função exponencial que caracteriza o 1 decaimento da sinusoide amortecida que constitui o regime transitório da resposta do sistema à entrada escalão unitário. Considere-se a função contı́nua definida por esta exponencial ∆y M (t) = e−ξωn t . Na Figura 2 representa-se o desvio ∆y(t) a que se sobrepôs a função exponencial ∆y M (t) (a tracejado). Como se pode observar, a função ∆y M (t) representa, para quase todos os instantes de ∆y(t) 1 0.05 0 ts taprox s t Figure 2: Desvio ∆y(t). tempo, um majorante ao desvio ∆y(t). Um valor aproximado para o tempo de estabelecimento é dado pelo instante de tempo para o qual a função contı́nua ∆y M (t) é igual a 0.05, i.e., ∆y M (t) = e−ξωn t = 0.05 ⇐⇒ ts ≃ 3 . ξωn (4) A aproximação anterior, sendo tanto melhor quanto maior for a frequência de oscilação da resposta do sistema, só é válida quando ts > tp . Em particular, considerando ωn fixo, é fácil verificar que a expressão (4) não é válida para ξ > 0.7 , i.e., a resposta seja de tal forma amortecida que a sobre-elevação seja inferior a 5 %. Este resultado é concordante com o observado na Figura 1. A expressão (4) permite verificar que, tal como para o sistema de 1a ordem, o tempo de estabelecimento de um sistema de 2a ordem é aproximadamente igual a três vezes o módulo da parte real dos polos (neste caso, do par complexo conjugado). 2
Baixar