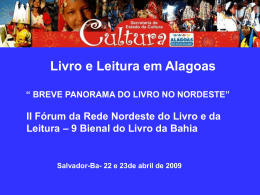
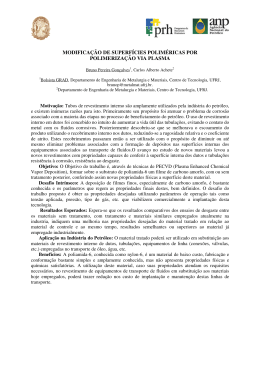
Desenvolvimento de um Sistema de Visão 3D para Inspeção e Reparo Robotizado Submerso Renata Faraco Cunha (bolsista); Marcelo Ricardo Stemmer (co-orientador) ; Armando Albertazzi Gonçalves Jr (orientador). MOTIVAÇÃO: As atividades ligadas ao petróleo são totalmente dependentes de dutos de transporte de alta confiabilidade e produção, fatores somente obtidos com uma manutenção de rapidez e confiabilidade. Devido às condições às quais esses dutos estão submetidos é comum usar-se sistemas robotizados submergíveis controlados remotamente. Esse controle se dá por operadores humanos na superfície, guiados por câmeras acopladas ao robô. No caso de imagens submarinas, geralmente elas têm baixa qualidade ocasionada pela profundidade que o robô se encontra, interferindo na iluminação e contraste. Um sistema de visão 3D que melhore esses parâmetros e forneça ao operador do robô mais dados metrológicos é uma maneira para que as atividades de verificação e reparo sejam de melhor qualidade. OBJETIVOS DO TRABALHO: Este trabalho procura a obtenção de um sistema de visão submarina 3D computacional. Para isto, temos como atividades a especificação de hardware e software, o projeto e desenvolvimento do software otimizado, sua integração com o sistema de aquisição de imagens e sua validação. APLICAÇÃO NA INDÚSTRIA DO PETRÓLEO: Pelo interesse em manter todos os equipamentos funcionando com as melhores condições físicas continuamente a industria de petróleo e gás investe na inspeção e reparo de estruturas submersas, sem ter que tirá-las de seu lugar de funcionamento, a fim de que não haja parada da produção. Nas linhas de transmissão de óleo e gás, verifica-se anomalias nos dutos, que, quanto mais cedo detectadas, menos custo implicam na reparação. Normalmente se apresentam como amassamentos, trincas, pontos de corrosão e perdas de espessura. Para essas atividades, usam-se robôs devido as condições de trabalho, e para o seu controle é essencial um sistema de visão 3D desenvolvido e preciso. Figura 1 – Plataforma de petróleo AGRADECIMENTOS: RESULTADOS OBTIDOS: Atualmente, está em desenvolvimento uma interface gráfica para a manipulação das imagens obtidas pelo sistema de captura projetado. Para isso, foram estudadas bibliotecas como WxWidgets para a interface, OpenCV para a manipulação 2D e OpenGL para a manipulação 3D. O estudo e familiarização dessas bibliotecas assim como sua integração no ambiente de desenvolvimento utilizado pela equipe foram os principais objetivos, pois conhecer o potencial de cada biblioteca torna o projeto da interface mais fácil e detalhado. Figura 2 – Protótipos de telas do sistema a ser desenvolvido CONCLUSÕES: Os resultados dos testes de cada biblioteca escolhida e da integração das três bibliotecas no ambiente de desenvolvimento utilizado pela equipe foram satisfatórios. O projeto da estrutura da interface será realizado com base no alcance de cada biblioteca para um software integrado otimizado, com as funções metrológicas propostas inseridas. Em paralelo, ocorrerá a integração do software com os imagens obtidas pelo hardware em desenvolvimento. Após isso, serão feitos estudos sobre a portabilidade no capacete do operador e a validação do software com testes. Figura 3 – Capacete e resultados desejados
Baixar