DINÂMICA DOS SISTEMAS DE
PARTÍCULAS E DOS CORPOS RÍGIDOS
I. Cabrita Neves
Setembro de 2005
Índice
1
2
3
4
5
6
7
Momento linear de um sistema de partículas ............................................................... 3
Teorema do movimento do centro de massa ............................................................... 3
Princípio da Conservação do Momento Linear............................................................. 6
Princípio do Trabalho-Energia ou Teorema das Forças Vivas ..................................... 7
Princípio da conservação da energia............................................................................ 8
Princípio do Impulso e Quantidade de Movimento ou Teorema da Impulsão.............. 9
Teorema do momento angular de um sistema de partículas em relação a um ponto
fixo O ........................................................................................................................... 10
8
Teorema do momento angular de um sistema de partículas em relação ao seu centro
de massa G................................................................................................................. 11
9
Momento angular de um sistema de partículas em relação ao seu centro de massa,
expresso em termos das velocidades relativas de cada partícula em relação ao
centro de massa.......................................................................................................... 12
10
Princípio da conservação do momento angular ......................................................... 13
11
Princípio do impulso angular e momento angular ou teorema da impulsão para
momentos angulares................................................................................................... 13
12
Momento angular de um corpo rígido em relação a um ponto fixo O ........................ 14
13
Momento angular de um corpo rígido em relação ao seu centro de massa .............. 16
14
Energia cinética de um corpo rígido animado de movimento de rotação em torno de
um ponto fixo O........................................................................................................... 17
15
Expressão geral da energia cinética de um corpo rígido............................................ 18
16
Equações do movimento de um corpo rígido em torno de um ponto fixo O. Equações
de Euler ....................................................................................................................... 20
17
Movimento de um corpo rígido em torno de um eixo fixo........................................... 21
18
Movimento plano de um corpo rígido.......................................................................... 22
19
Equações gerais do movimento de um sistema de partículas e de um corpo rígido . 23
ANEXO I................................................................................................................................... 24
Derivada em ordem ao tempo de um vector escrito num referencial animado de movimento
de rotação ................................................................................................................................ 24
ANEXO II.................................................................................................................................. 26
CINEMÁTICA DO CORPO RÍGIDO ........................................................................................ 26
II.1 Movimentos instantâneos de um corpo rígido ................................................................... 26
II.2 Fórmula de propagação de velocidades dos pontos de um corpo rígido.......................... 26
II.3 Fórmula de propagação de acelerações dos pontos de um corpo rígido ......................... 27
2
1
Momento linear de um sistema de partículas
r
Considere-se uma partícula de massa m animada de uma velocidade v . Designa-se
r
por momento linear ou quantidade de movimento da partícula o vector p dado por
r
r
p = mv
(1)
O momento linear de um sistema de n partículas será a soma dos momentos lineares
de cada uma delas
n
n
r
r
r
p = ∑ p i = ∑ mi v i
i =1
(2)
i =1
r
sendo mi a massa da partícula i e vi a respectiva velocidade.
Da definição de vector de posição do centro de massa de um sistema de partículas,
sabe-se que
n
M OG = ∑ mi OA i
(3)
i =1
sendo OAi o vector de posição da partícula i relativamente a um referencial de origem
num ponto O e M a massa total do sistema. Derivando ambos os membros desta
equação em ordem ao tempo, vem
M
n
d OG
d OAi
= ∑ mi
dt
dt
i =1
n
r
r
M v G = ∑ mi v i
(4)
(5)
i =1
pelo que o momento linear de um sistema de partículas se pode escrever
n
r
r
r
p = ∑ mi v i = M v G
(6)
i =1
2
Teorema do movimento do centro de massa
A 2ª Lei de Newton, aplicada ao movimento de uma partícula de massa m sujeita à
r
acção de um conjunto de forças de resultante R , é uma relação vectorial que
r
r
estabelece o paralelismo entre esta resultante R e a aceleração a que a partícula
adquire.
3
r
r
R = ma
(7)
r
r
A aceleração a tem a mesma direcção e o mesmo sentido que a resultante R , e a sua
r
intensidade é proporcional à intensidade de R , sendo a massa m a constante de
proporcionalidade. De duas partículas com massas distintas sujeitas ao mesmo
conjunto de forças adquirirá maior aceleração a que tiver menor massa, e
inversamente. A que tiver maior massa oferecerá maior resistência a modificar o
estado de repouso ou de movimento em que se encontre.
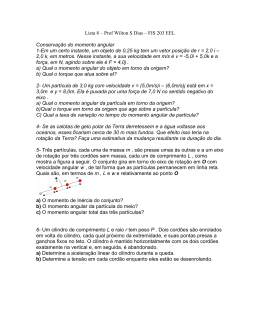
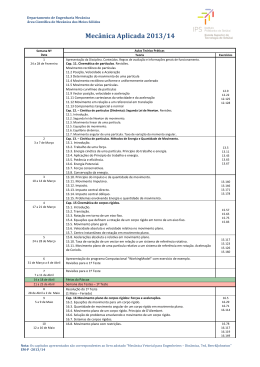
De um sistema constituído por n partículas tomemos a partícula genérica i, de massa
mi , localizada no ponto Ai . Esta partícula estará sujeita a um conjunto de forças cuja
r
resultante designaremos por Fi (Fig. 1).
r
F2
r
F1
Ai m
i
r
Fi
r
Fm
Fig. 1
A aplicação da 2ª lei de Newton a esta partícula do sistema resulta em
r
r
Fi = mi ai
(8)
r
representando por a i a sua aceleração.
As forças que actuam na partícula i ou são exercidas por outras partículas do sistema,
e chamam-se forças interiores, ou são exercidas por partículas exteriores ao sistema, e
r
designam-se por forças exteriores. Designando por Fi int a resultante das forças
r
interiores que actuam na partícula i e por Fi ext a resultante das forças exteriores, temos
r
r
r
r
Fi = Fi int + Fi ext = mi ai
(9)
Podemos escrever uma equação deste tipo por cada uma das n partículas que
constituem o sistema, e se as somarmos todas membro a membro virá
n r
n
r int
r
ext
F
F
+
=
∑ i ∑ i ∑ mi a i
n
i =1
i =1
(10)
i =1
Mas, pelo Princípio da acção e reacção, as forças de inter-acção entre quaisquer duas
partículas são iguais e opostas, pelo que
4
r int
n
∑F
i
i =1
=0
(11)
e a Eq. 10 transforma-se em
n
r ext
r
F
=
∑ i ∑ mi a i
n
i =1
(12)
i =1
Por outro lado, derivando ambos os membros da Eq. 5 em ordem ao tempo, vem
r
r
n
d vG
d vi
M
= ∑ mi
dt
dt
i =1
(13)
n
r
r
M a G = ∑ mi a i
(14)
i =1
r
em que a G representa a aceleração absoluta do centro de massa do sistema de
r
partículas e a i a aceleração absoluta da partícula i , se O for um ponto fixo.
Substituindo a Eq. 14 na Eq. 12, fica
n
r ext
∑F
i =1
i
r
= M aG
(15)
Esta equação traduz a expressão vectorial do chamado Teorema do Movimento do
Centro de Massa, o qual se pode enunciar da seguinte forma:
O centro de massa de um sistema de partículas move-se como se moveria uma
partícula onde se concentrasse a massa total do sistema e que estivesse actuada por
uma força igual à soma de todas forças exteriores que actuam no sistema de
partículas.
É evidente que, não tendo sido dito nada quanto ao número de partículas que
constituem o sistema, a Eq. 15 aplicar-se-á também aos sistemas em que a massa se
distribui de forma contínua num determinado domínio, e em particular a um corpo
rígido ou a um conjunto de corpos rígidos.
O Teorema do Movimento do Centro de Massa mostra-nos que, alterações nas forças
interiores ao sistema não têm qualquer influência no movimento do seu centro de
massa.
O exemplo clássico é o da granada cujo centro de massa se desloca após a explosão
seguindo exactamente a mesma trajectória que seguiria se a granada não explodisse.
5
3
Princípio da Conservação do Momento Linear
Derivando a Eq. 6 em ordem ao tempo obtém-se
r
r
d vG
dp
r
=M
= M aG
dt
dt
(16)
E conjugando com a Eq. (15), vem
v ext d pr
F
=
∑
i
dt
i =1
n
(17)
Mas
n
v ext
∑F
i =1
i
=0
⇒
r
p = const
(18)
o que significa que
(M vrG )1 = (M vrG )2
(19)
r n
r
n
∑ mi v i = ∑ mi v i
i =1
1 i =1
2
(20)
ou
As Eqs. 19 e 20 traduzem o Princípio da Conservação do Momento Linear:
Sempre que seja nula a soma das forças exteriores actuantes num sistema material
haverá conservação da quantidade de movimento total.
Repare-se que, sendo a Eq. 15 uma relação vectorial, ela é susceptível de ser
decomposta em componentes, o que significa que poderá haver conservação do
momento linear numa direcção e não noutra. È o caso de um corpo que é lançado com
velocidade inicial com componente horizontal diferente de zero. Desprezando a
resistência do ar, não há forças horizontais actuando no corpo e a componente
horizontal do momento linear conservar-se-á, o que significa que o corpo irá manter a
sua componente horizontal de velocidade ao longo do percurso, enquanto que na
vertical, estando permanentemente sujeito à acção constante do seu peso, irá deslocarse com aceleração constante, a aceleração da gravidade.
6
4
Princípio do Trabalho-Energia ou Teorema das Forças Vivas
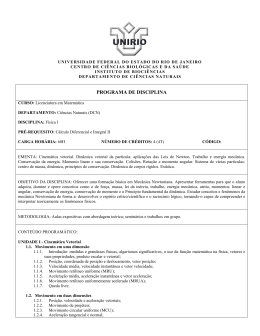
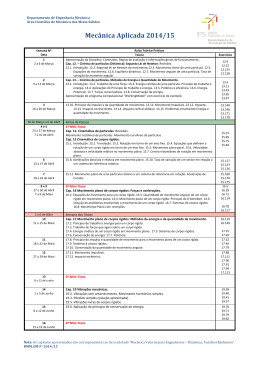
Considere-se a trajectória da partícula genérica i de um sistema de partículas (Fig. 2),
r
e seja Fi a resultante das forças que sobre ela actuam.
r
Fi
2
Ai
d ri
1
r
ri + d r i
r
ri
z
O
y
x
Fig. 2
r
O trabalho realizado por Fi no deslocamento elementar d r i da partícula será dado
por
r
r
d τ i = Fi ⋅ d ri
(21)
Atendendo à 2ª lei de Newton, esta equação pode escrever-se
r
r
r
r
d vi
⋅ d ri
d τ i = (mi ai ) ⋅ d ri = mi
dt
(22)
r
r
r dr
d ri = i dt = v i dt
dt
(23)
r r
1
r r
1
d τ i = mi (d v i ⋅ v i ) = m i d (v i ⋅ v i ) = d m i v i2
2
2
(24)
d τ i = d Ti
(25)
Mas
pelo que
Ou seja
em Ti representa a energia cinética da partícula i .
Integrando a Eq. 25 entre as posições 1 e 2, temos
7
∫
Ti 2
d τ i = ∫ d Ti
(26)
τ i 1→2 = Ti 2 − Ti 1
(27)
12
Ti 1
ou seja,
A Eq. 27 traduz o Princípio do Trabalho-Energia ou Teorema das Forças Vivas para
uma partícula, o qual pode ser enunciado da seguinte forma:
O trabalho realizado pela resultante das forças que actuam numa partícula quando
esta se desloca de uma posição 1 para uma posição 2 é igual à variação da energia
cinética da partícula entre esses dois instantes.
A Eq. 27 aplica-se a qualquer partícula de um sistema. Se as somarmos todas, ficará
n
n
n
i =1
i =1
i =1
∑τ i1→2 = ∑ Ti 2 − ∑ Ti1
(28)
τ 1→2 = T2 − T1
(29)
ou seja,
A Eq. 29 traduz o Princípio do Trabalho-Energia ou Teorema das Forças Vivas para
um sistema de partículas, o qual pode ser enunciado da seguinte forma:
O trabalho realizado por todas as forças que actuam em todas as partículas de um
sistema quando estas se deslocam de uma posição 1 para uma posição 2 é igual à
variação da energia cinética do sistema entre esses dois instantes.
Como se sabe do Princípio dos Trabalhos Virtuais, num corpo rígido é nulo o
trabalho realizado pelas forças interiores. Assim sendo, para um corpo rígido, o
Princípio do Trabalho-Energia assume a forma
τ 1ext
→ 2 = T2 − T1
5
(30)
Princípio da conservação da energia
Como se sabe do Princípio dos Trabalhos Virtuais, quando as forças que actuam num
sistema são todas conservativas, o trabalho que estas realizam é igual a menos a
variação da energia potencial que lhes está associada. Assim sendo, quando as forças
que actuam num sistema são todas conservativas, o Princípio do Trabalho-Energia
assume a forma
8
τ 1ext
→ 2 = −(V 2 − V1 ) = T2 − T1
(31)
ou seja
T1 + V1 = T2 + V2
(32)
que constitui o Princípio da Conservação da Energia:
Um sistema actuado por forças conservativas evolui de tal forma que a soma da
energia cinética com a energia potencial se mantém constante.
6
Princípio do Impulso e Quantidade de Movimento ou Teorema da Impulsão
r
r
Define-se impulso de uma força F num intervalo de tempo dt ao produto F dt .
O impulso da resultante das forças que actuam na partícula genérica i de um sistema,
no intervalo de tempo dt será, recorrendo à 2ª lei de Newton
r
r
d vi
r
r
r
Fi dt = mi ai dt = mi
dt = mi d vi = d (mi vi )
dt
(33)
Integrando ambos os membros entre dois instantes t1 e t2 fica
∫
t2
t1
r
r
vi 2
r
r
r
Fi dt = ∫r d (mi vi ) = (mi vi )2 − (mi vi )1
vi 1
(34)
A Eq. 34 traduz o Princípio do Impulso e Quantidade de Movimento ou Teorema da
Impulsão para uma partícula:
O impulso das forças que actuam numa partícula num certo intervalo de tempo é
igual à variação da quantidade de movimento da partícula nesse intervalo de tempo.
A Eq. 33 aplica-se a qualquer partícula de um sistema. Se as somarmos todas, ficará
.
n r
n
r
r
r
n
F
dt
d
m
v
d
(35)
=
(
)
=
∑ mi vi = d (M vG )
∑
∑
i
i i
i =1
i =1
i =1
O somatório de todas as forças que actuam em todas as partículas do sistema inclui as
forças interiores e as forças exteriores. Sendo nulo, como sabemos, o somatório das
forças interiores, temos
n
r ext
∑F
i =1
i
r
dt = d (M vG )
9
(36)
E uma vez mais, se integrarmos ambos os membros da Eq. 36 entre dois instantes t1 e
t2 obtemos
∫
t2
t1
r ext
r
r
F
∑ i dt = (M vG )2 − (M vG )1
n
(37)
i =1
Esta equação traduz o Princípio do Impulso e Quantidade de Movimento ou Teorema
da Impulsão para um sistema de partículas:
O impulso das forças exteriores a um sistema de partículas num certo intervalo de
tempo é igual à variação da quantidade de movimento do sistema nesse mesmo
intervalo de tempo.
Se o somatório das forças exteriores ao sistema for nulo, reencontramos aqui o
Princípio da Conservação da Quantidade de Movimento.
7
Teorema do momento angular de um sistema de partículas em relação a um
ponto fixo O
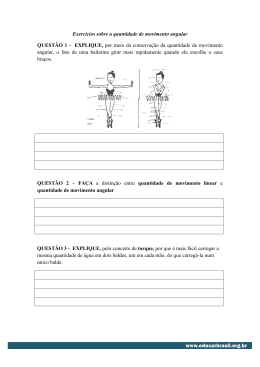
Define-se momento angular de uma partícula genérica i de um sistema em relação a
um ponto fixo O como o momento em relação a esse ponto do vector momento linear
da partícula.
r
r
LOi = OA i × mi vi
r
LOi
(38)
r
mi v i
O
Ai
Fig. 3
O momento angular do sistema de partículas em relação ao ponto O será a soma dos
momentos angulares de cada uma das partículas que o constituem.
n r
n
r
r
LO = ∑ LOi = ∑ OA i × mi vi
i =1
(39)
i =1
Derivemos ambos os membros desta equação em ordem ao tempo.
r
r
n
n
d LO
d vi
d OAi
r
r
d n
= ∑ OAi × mi vi = ∑
× mi vi + ∑ OAi × mi
dt
dt i =1
dt
dt
i =1
i =1
(40)
que é equivalente a
r
n
n
n
r
d LO
r
r
r
= ∑ vi × mi vi + ∑ OA i × mi ai = ∑ OA i × Fi
dt
i =1
i =1
i =1
10
(41)
Mas, tendo em atenção a Eq. 9, fica
r
n
n
r
r
r
r
d LO
= ∑ OAi × Fi int + ∑ OAi × Fi ext = M Oint + M Oext
dt
i =1
i =1
(42)
r
sendo M Oext o momento em relação ao ponto O das forças exteriores ao sistema de
r
partículas e M Oint o momento em relação a O das forças interiores, o qual é nulo, por
as forças interiores serem iguais e opostas duas a duas. Ficará finalmente
r
r
d LO
= M Oext
dt
(43)
expressão que representa o Teorema do Momento Angular de um sistema de
partículas em relação a um ponto fixo O:
A derivada em ordem ao tempo do momento angular de um sistema de partículas em
relação a um ponto fixo O é igual ao momento resultante em relação a O do sistema
de forças exteriores ao sistema de partículas.
8
Teorema do momento angular de um sistema de partículas em relação ao seu
centro de massa G
O momento angular de uma partícula genérica i de um sistema em relação ao centro
de massa G desse sistema será dado por
r
r
LGi = GAi × mi vi
(44)
E o momento angular do sistema de partículas em relação a G será a soma dos
momentos angulares de cada uma das partículas que o constituem.
n r
n
r
r
LG = ∑ LGi = ∑ GAi × mi vi
i =1
(45)
i =1
Derivando ambos os membros em ordem ao tempo, fica
r
r
n
n
r
d LG
d GAi
dv
=∑
× mi vi + ∑ GAi × mi i
dt
dt
dt
i =1
i =1
Ai
O vector GAi pode decompor-se em (Fig. 4)
GAi = OAi − OG
(46)
G
(47)
sendo O um ponto fixo.
O
11
Fig. 4
Derivando em ordem ao tempo, fica
d GAi d OAi d OG
=
−
dt
dt
dt
(48)
d GAi r r
= vi − vG
dt
(49)
r
n
r
r n r
r n
r
d LG
= ∑ vi × mi vi − ∑ vG × mi vi + ∑ GAi × mi ai
dt
i =1
i =1
i =1
(50)
ou seja
E introduzindo na Eq. 46
Esta equação pode ser simplificada
r
n
n
n
r r
r
r
r n
r
d LG r
= vG × ∑ mi vi + ∑ GAi × Fi = vG × M vG + ∑ GAi × Fi int + ∑ GAi × Fi ext (51)
dt
i =1
i =1
i =1
i =1
ou ainda, finalmente
r
r
d LG
= M Gext
dt
(52)
expressão que representa o Teorema do Momento Angular de um sistema de
partículas em relação ao seu centro de massa G, que como se vê, assume a mesma
forma que em relação a um ponto fixo O:
A derivada em ordem ao tempo do momento angular de um sistema de partículas em
relação ao seu centro de massa G é igual ao momento resultante em relação a G do
sistema de forças exteriores ao sistema de partículas.
9
Momento angular de um sistema de partículas em relação ao seu centro de
massa, expresso em termos das velocidades relativas de cada partícula em
relação ao centro de massa
A Eq. 45, que traduz o momento angular de um sistema de partículas em relação ao
r
seu centro de massa G, faz intervir a velocidade absoluta vi de cada partícula em
relação a um ponto fixo O. Tomemos esta expressão, substituindo esta velocidade
r
absoluta pela velocidade relativa vi′ da partícula i em relação ao centro de massa.
n
r
r
LG′ = ∑ GAi × mi vi′
i =1
12
(53)
r
A velocidade relativa vi′ da partícula i em relação ao centro de massa é dada por
r d GAi
vi′ =
dt
(54)
e atendendo à Eq. 49, fica
n
n
r
r
r n
r
r
LG′ = ∑ GAi × mi vi − ∑ GAi × mi vG = LG − ∑ GAi × mi vG
i =1
i =1
(55)
i =1
Mas, atendendo a que
n
∑ GA
i =1
i
n
r
r
r
× mi vG = ∑ mi GA i × vG = M GG × vG = 0
(56)
i =1
Fica
r
r
LG′ = LG
(57)
Isto significa que o momento angular de um sistema de partículas em relação ao seu
centro de massa tanto pode ser calculado utilizando as velociades absolutas das
partículas como as suas velocidades relativas em relação ao centro de massa.
10 Princípio da conservação do momento angular
Sempre que seja nulo o momento das forças exteriores em relação a um ponto fixo O
ou em relação ao centro de massa G do sistema, as Eqs. 43 e 52 fornecem
r
r
LO1 = LO 2
(58)
r
r
LG1 = LG 2
(59)
Isto traduz o Princípio da Conservação do Momento Angular:
Sempre que seja nulo o momento das forças exteriores em relação a um ponto fixo O
ou em relação ao centro de massa G do sistema haverá conservação do momento
angular do sistema em relação a O ou a G, respectivamente.
11 Princípio do impulso angular e momento angular ou teorema da impulsão
para momentos angulares
A Eq. 43 pode ser escrita na forma
13
r
r
d LO = M Oext dt
(60)
Integrando ambos os membros entre os instantes t1 e t2 , temos
r
LO 2
r
LO1
r
t2 r
d LO = ∫ M Oext dt
(61)
r
r
t2 r
LO 2 − LO1 = ∫ M Oext dt
(62)
∫
t1
ou seja
t1
O integral do segundo membro representa o impulso angular das forças exteriores ao
sistema no intervalo de tempo ∆t = t 2 − t1 em relação ao ponto fixo O, e a Eq. 62
traduz o Princípio do Impulso Angular e Momento Angular ou Teorema da Impulsão
para Momentos Angulares:
O impulso angular em relação a um ponto fixo O das forças exteriores a um sistema
material num intervalo de tempo ∆t = t 2 − t1 é igual à variação do momento angular
do sistema em relação a O nesse mesmo intervalo de tempo.
Quando o momento resultante das forças exteriores ao sistema em relação a O é nulo,
reencontramos aqui o Princípio da Conservação do Momento Angular.
O Teorema da Impulsão para Momentos Angulares é igualmente válido quando se
toma o centro de massa do sistema em vez de um ponto fixo O.
r
r
t2 r
LG 2 − LG1 = ∫ M Gext dt
t1
(63)
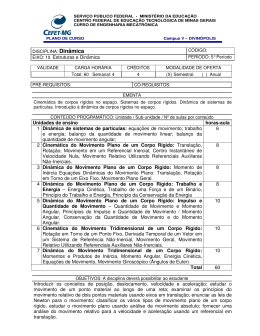
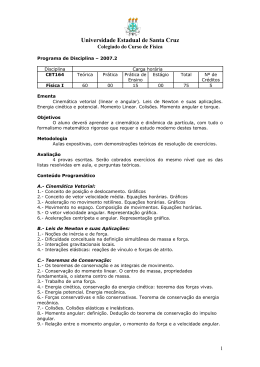
12 Momento angular de um corpo rígido em relação a um ponto fixo O
Considere-se um ponto genérico P de um corpo rígido animado de movimento de
rotação em torno de um ponto fixo O (Fig. 5), ao qual se associa o elemento de massa
dm.
x3
r
vP
r
ω
dm
P
O
x2
x1
Fig. 5
14
r
Este ponto, que está animado de uma velocidade vP , possui um momento linear dado
r
r
por vP dm e um momento angular em relação a O dado por OP × vP dm . O momento
angular do corpo rígido em relação a O obter-se-á a partir de
r
r
LO = ∫ OP × vP dm
(64)
M
Propagando velocidades de O para P, tem-se
r
r
r
r
vP = vO + ω × OP = ω × OP
(65)
Introduzindo na Eq. 64, fica
(
)
r
r
LO = ∫ OP × ω × OP dm
M
(66)
No capítulo Tensores Cartesianos provou-se que
(
) (
) (
)
r r r
r r r r r r
A× B ×C = A⋅C B − A⋅ B C
(67)
pelo que
(
)
[(
) (
) ]
(68)
]
(69)
r
r
r
r
LO = ∫ OP × ω × OP dm = ∫ OP ⋅ OP ω − OP ⋅ ω OP dm
M
M
Esta expressão pode ser escrita usando linguagem indicial.
[
]
[
LOi = ∫ xk xk ωi − x j ω j xi dm = ∫ xk xk δ ij ω j − x j ω j xi dm
M
M
Uma vez que as componentes da velocidade angular funcionam como constantes na
integração em causa, vem
[
]
LOi = ∫ xk xk δ ij − x j xi ω j dm =
M
[∫ (x x δ
M
k
k
ij
]
− xi x j ) dm ω j
(70)
.Finalmente, recordando a definição de tensor de inércia, fica
LOi = I ijO ω j
(71)
{LO } = [I O ]{ω}
(72)
ou, utilizando notação matricial
em que I ijO e [I O ] se referem a componentes do tensor de inércia do corpo
relativamente a um referencial com origem em O.
15
13 Momento angular de um corpo rígido em relação ao seu centro de massa
Por analogia com a Eq. 64, o momento angular de um corpo rígido em relação ao seu
centro de massa pode calcular-se a partir de
r
r
LG = ∫ GP × vP dm
(73)
r
r
r
vP = vG + ω × GP
(74)
M
Mas
Substituindo atrás, fica
(
)
(75)
r
= M GG × vG = 0
(76)
)
(77)
r
r
r
LG = ∫ GP × vG dm + ∫ GP × ω × GP dm
M
M
Mas
∫
M
r
GP × vG dm =
(∫ GP dm )× vr
G
M
pelo que
(
r
r
LG = ∫ GP × ω × GP dm
M
Recorrendo de novo à Eq. 67 ter-se-á
(
)
[(
) (
) ]
r
r
r
r
LG = ∫ GP × ω × GP dm = ∫ GP ⋅ GP ω − GP ⋅ ω GP dm
M
M
(78)
Representando por xi′ as coordenadas do ponto P num referencial com origem em G,
a Eq. 78 pode escrever-se, em notação indicial
LGi = ∫ (x′k xk′ ωi − x′j ω j xi′ )dm =
M
(∫ (x′ x′ δ
M
k
k
ij
)
− xi′ x′j )dm ω j
(79)
Finalmente
LGi = I ijG ω j
(80)
{LG } = [I G ]{ω}
(81)
ou seja, em linguagem matricial
16
expressões em tudo análogas às Eqs. 71 e 72, com a diferença de que I ijG e [I G ] se
referem a componentes do tensor de inércia do corpo relativamente a um referencial
com origem em G.
A Eq. 81 escrita no referencial das direcções principais de inércia em G resulta
particularmente simples.
I I
{LG } = 0
0
0
I II
0
0 ωI I I ωI
0 ω II = I II ω II
I III ω III I III ω III
(82)
14 Energia cinética de um corpo rígido animado de movimento de rotação em
torno de um ponto fixo O
Considere-se novamente um corpo rígido animado de movimento de rotação em torno
de um ponto fixo O (Fig. 5).
A energia cinética deste corpo será dada por
T =∫
M
1 2
vP dm
2
(83)
Mas
r r
vP2 = vP ⋅ vP
(84)
e, atendendo à Eq. 65, fica
(
)(
)
(85)
vP2 = eijk ωi x j e pqk ω p xq
(86)
r
r
vP2 = ω × OP ⋅ ω × OP
que se pode escrever em linguagem indicial
Recorrendo à identidade de permutação
vP2 = (δ ip δ jq − δ iq δ jp )ωi x j ω p xq = δ ip δ jq ωi x j ω p xq − δ iq δ jp ωi x j ω p xq
(87)
Simplificando, temos
vP2 = δ ip ωi x j ω p x j − ωi x p ω p xi
Introduzindo na Eq. 83, ficará
17
(88)
T=
1
(δ ip ωi x j ω p x j − ωi x p ω p xi )dm
2 ∫M
(89)
E uma vez que as componentes da velocidade angular do corpo funcionam como
constantes relativamente à integração em causa, podem ser postas para fora do
integral, ficando
1
T = ωi
2
[∫ ( x x δ
M
j
j
ip
]
− xi x p )dm ω p =
1 O
I ip ωi ω p
2
(90)
A expressão da energia cinética de um corpo rígido animado de movimento de rotação
em torno de um ponto fixo O pode assim ser expressa em notação indicial ou matricial
através de
1 O
I ij ωi ω j
2
(91)
1
{ω}T [I O ]{ω}
2
(92)
T=
T=
em que I ijO e [I O ] se referem a componentes do tensor de inércia do corpo
relativamente a um referencial com origem em O.
15 Expressão geral da energia cinética de um corpo rígido
Considere-se um corpo rígido animado de um movimento genérico (Fig. 6). A energia
cinética deste corpo continua a poder ser obtida através da Eq. 83.
r
ω
r
vP
x3′
x′2
dm
P
x3
G
O
x1′
x1
Fig. 6
Mas
18
x2
r
r
r
vP = vG + ω × GP
(93)
e
(
) (
)(
r
r
r r
r r
vP2 = vP ⋅ vP = vG2 + 2 vG ⋅ ω × GP + ω × GP ⋅ ω × GP
)
(94)
Introduzindo na Eq. 83, ficamos com 3 integrais
T=
(
)
(
)(
)
(95)
r r
r r
r r
vG ⋅ ω × GP dm = vG ⋅ ω × ∫ GP dm = vG ⋅ ω × M GG = 0
(96)
r
r
r r
1
1
vG2 dm + ∫ vG ⋅ ω × GP dm + ∫ ω × GP ⋅ ω × GP dm
∫
M
2 M
2 M
O 2º destes integrais é nulo, visto que
∫
M
(
[
)
]
M
O 3º integral pode ser trabalhado, utilizando notação indicial e representando por xi′ a
coordenada genérica do ponto P num referencial com origem em G
(
)(
)
r
r
1
1
ω × GP ⋅ ω × GP dm = ∫ (eijk ωi x′j e pqk ω p x′q )dm
∫
2 M
2 M
(97)
E recorrendo à identidade de permutação teremos, após simplificação
(
)(
)
r
r
1
1
ω × GP ⋅ ω × GP dm = ωi
∫
2 M
2
[∫ ( x′ x′ δ
M
j
j
ip
]
− xi′ x′p )dm ω p =
1 G
I ip ωi ω p (98)
2
Esta parcela corresponde à energia cinética de rotação do corpo em torno do seu
centro de massa e pode ser escrita em notação matricial como
Trot =
1
{ω}T [I G ]{ω}
2
(99)
O 1º integral da Eq. 95 transforma-se em
1
1
1
vG2 dm = vG2 ∫ dm = M vG2
∫
M
M
2
2
2
(100)
Esta parcela corresponde à energia cinética de translação do corpo. A expressão geral
da energia cinética de um corpo rígido animado de um movimento genérico será então
T = Ttransl + Trot =
1
1
1
1
T
M vG2 + I ijG ωi ω j = M vG2 + {ω} [I G ]{ω}
2
2
2
2
19
(101)
16 Equações do movimento de um corpo rígido em torno de um ponto fixo O.
Equações de Euler
As equações do movimento de um corpo rígido em torno de um ponto fixo O podem
obter-se recorrendo ao teorema do momento angular (Eq. 43)
r
r
d LO
= M Oext
dt
(43)
Antes de mais é necessário calcular o momento angular do corpo rígido em relação ao
ponto O (Eq. 72)
{LO } = [I O ]{ω}
(72)
O referencial para a escrita desta equação deve ter origem no ponto O. De resto, pode
ser qualquer referencial. Temos fundamentalmente duas alternativas. Ou escolhemos
um referencial fixo, que permaneça imóvel enquanto o corpo roda em torno de O, ou
usamos um referencial que se mova solidariamente com o corpo rígido. Atendendo a
que vai ser necessário derivar o momento angular em ordem ao tempo, a segunda
alternativa é preferível, visto que então todas as componentes da matriz de inércia
serão constantes ao longo do tempo. No entanto, será necessário ter em conta que o
momento angular estará escrito num referencial animado de movimento de rotação,
aplicando-se-lhe então as correspondentes regras específicas de derivação em ordem
ao tempo (ver anexo I). Teremos então
r
r
dLO δ LO r r
=
+ Ω × LO
dt
δt
(102)
r
sendo Ω a velocidade angular do referencial.
Se além disso escolhermos o referencial coincidente com as direcções principais de
inércia do corpo no ponto O, a escrita da Eq. 72 simplifica-se
I I
{LO } = [I O ]{ω} = 0
0
0
I II
0
0 ωI I I ωI
0 ω II = I II ω II
I III ω III I III ω III
(103)
e a 1ª parcela da Eq. 102 fica
I I ω& I I I α I
δ
{LO } = I II ω& II = I II α II
δt
I ω& I α
III III III III
(104)
sendo α I , α II ,α III as componentes da aceleração angular do corpo rígido no
referencial das direcções principais de inércia em O.
20
Mas se o referencial se move solidariamente com o corpo a sua velocidade angular
r
r
Ω coincide com a velocidade angular do corpo ω , e a 2ª parcela da Eq. 102 fica
r
eI
r r
r r
Ω × LO = ω × LO = ω I
I I ωI
r
eII
r
eIII
ω II
I II ω II
ω III
I III ω III
(105)
ou seja
r r
r
r
r
ω × LO = (I III − I II )ω II ω III eI + (I I − I III )ω III ω I eII + +(I II − I I )ω I ω II eIII
(106)
Finalmente, introduzindo na Eq. 43 obtém-se
ext
M Ox
I I α I − (I II − I III )ω II ω III
ext
M Oy = I II α II − (I III − I I )ω III ω I
M ext I α − (I − I )ω ω
I
II
I
II
Oz III III
(107)
Estas são as equações que regem o movimento de um corpo rígido em torno de um
ponto fixo O, conhecidas como Equações de Euler.
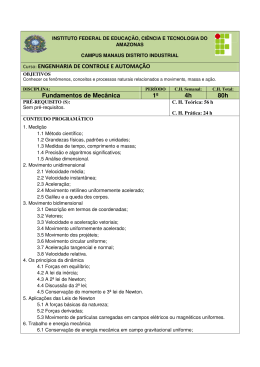
17 Movimento de um corpo rígido em torno de um eixo fixo
No caso em que o movimento do corpo corresponde a uma rotação em torno de um
eixo fixo (Fig. 7), em vez de um, temos uma infinidade de pontos fixos, os quais
podem ser escolhidos para aplicar o teorema do momento angular. Neste caso é útil
escolher o próprio eixo de rotação como um dos eixos do referencial, movendo-se os
restantes solidariamente com o corpo rígido. Se escolhermos o eixo de rotação para
eixo x3 , teremos
x3
r
ω
M
O
x2
x1
Fig. 7
Ix
{LO } = [I O ]{ω} = − Pxy
− Pxz
− Pxy
Iy
− Pyz
21
− Pxz 0 − Pxz ω
− Pyz 0 = − Pyz ω
I z ω I z ω
(108)
e
− Pxz α
δ
{LO } = − Pyz α
δt
I α
z
(109)
sendo α a aceleração angular do corpo rígido. Será ainda
r r
r r
Ω × LO = ω × LO =
r
e1
r
e2
0
0
− Pxz ω − Pyz ω
r
e3
r
r
ω = Pyz ω 2 e1 − Pxz ω 2 e2
Iz ω
(110)
e finalmente
ext
M Ox
− Pxz α + Pyz ω 2
ext
2
M Oy = − Pyz α − Pxz ω
M ext
Iz α
Oz
(111)
18 Movimento plano de um corpo rígido
Como se sabe, o movimento plano de um corpo rígido é aquele em que as trajectórias
de todos os seus pontos existem em planos paralelos a um plano, dito plano do
movimento. O movimento contínuo corresponde a uma sucessão de movimentos
instantâneos de rotação em torno de eixos que são sempre perpendiculares ao plano do
movimento. Neste caso, para estudar o movimento escolhe-se um referencial solidário
com o corpo, com origem no seu centro de massa, em que um dos eixos é
perpendicular ao plano do movimento. A velocidade angular do corpo e a sua
aceleração angular terão sempre a direcção deste eixo. Chamemos-lhe x3 (Fig. 8).
x2
r
ω
( x3 )
x1
G
M
Fig. 8
Neste caso teremos equações idênticas às Eqs. 108 a 111, mas escritas num referencial
com origem no centro de massa G, e as equações do movimento serão
22
ext
M Gx
− Pxz α + Pyz ω 2
ext
2
M Gy = − Pyz α − Pxz ω
M ext
Iz α
Gz
(112)
em conjunto com as equações do movimento do centro de massa
Fxext M aGx
ext
Fy = M aGy
F ext M a
Gz
z
(113)
19 Equações gerais do movimento de um sistema de partículas e de um corpo
rígido
O movimento geral de um corpo rígido é regido pelo Teorema do Movimento do
Centro de Massa em conjunto com o Teorema do Momento Angular aplicado ao
centro de massa. Em cada instante, a posição do corpo ficará conhecida se se conhecer
a posição do seu centro de massa e a posição que o corpo ocupa relativamente ao
centro de massa. Na Estática, o sistema de forças exteriores a um corpo rígido
constituía um sistema equivalente a zero
r
F ext = 0
(114)
r
M Gext = 0
(115)
Na Dinâmica, as equações que regem o movimento de um sistema de partículas, e em
particular de um corpo rígido são
r
r
F ext = M aG
(116)
r
r ext d LG
MG =
dt
(117)
Desde que sejam conhecidas as condições iniciais do movimento, estas equações
permitirão conhecer a posição do corpo rígido em cada instante, fornecendo a posição
do centro de massa e a posição do corpo em relação ao centro de massa.
23
ANEXO I
Derivada em ordem ao tempo de um vector escrito num referencial animado de
movimento de rotação
r
Como se sabe, as componentes de um dado vector V dependem do referencial que se
escolhe para o representar. Uma vez que as componentes de um vector se obtêm por
projecção do vector sobre os eixos do referencial, em referenciais de eixos paralelos
as componentes de um dado vector são as mesmas. Isto significa que se escolhermos
um referencial animado de movimento de translação para representar um vector de
intensidade constante as suas componentes permanecerão inalteradas ao longo do
tempo. O mesmo não sucede se escolhermos um referencial animado de movimento
de rotação.
Um vector é constante quando não variam ao longo do tempo, nem a sua intensidade,
nem a sua direcção ou sentido. A variação de qualquer um destes parâmetros faz com
que o vector tenha derivada não nula em ordem ao tempo.
r r
Considere-se então um vector variável no tempo V = V (t ) escrito num referencial
r
animado de movimento de rotação com velocidade angular Ω (Fig. I-1)
r
Ω
x3
r
e3
r
e1
r
V
x2
r
O e2
x1
Fig. I-1
Teremos, utilizando notação indicial
r
r
V = Vi ei
(I-1)
r
r
r
dV
= V&i ei + Vi e&i
dt
(I-2)
e a derivada em ordem ao tempo virá
As derivadas em ordem ao tempo dos vectores de base do referencial justificam-se
porque a sua direcção varia ao longo do tempo, embora a sua intensidade permaneça
r
constante. Calculemos a derivada em ordem ao tempo do versor e1 . Para tanto,
consideremos um corpo rígido movendo-se solidariamente com o referencial e
24
r
r
designemos a extremidade do vector e1 por P (Fig. I-2). Deste modo, a derivada de e1
em ordem ao tempo coincide com a velocidade do ponto P, ou seja
r
Ω
x3
r
e3
r
e1
x2
r
O e2
P
x1
Fig. I-2
r d OP r
r
r r
r
e&1 =
= vP = vO + Ω × OP = Ω × e1
dt
(I-3)
r r r
e&i = Ω × ei
(I-4)
r
r r
r
r r
r
r r r
dV
= V&i ei + Vi Ω × ei = V&i ei + Ω × Vi ei = V&i ei + Ω × V
dt
(I-5)
Genericamente, teremos
e assim
r
r
δ
V
Representando simbolicamente V&i ei por
teremos por fim
δt
r
r
dV δ V r r
=
+ Ω ×V
dt
δt
(I-6)
r
δV
em que
representa a variação do vector por unidade de tempo supondo que o
δt
r r
referencial não roda (variação das suas componentes) e Ω × V representa a
contribuição da rotação do referencial para a variação do vector.
25
ANEXO II
CINEMÁTICA DO CORPO RÍGIDO
II.1 Movimentos instantâneos de um corpo rígido
São quatro os movimentos instantâneos possíveis para um corpo rígido:
1) Repouso instantâneo
r
ω = 0 velocidade angular nula
r
vP = 0 para todos os pontos do corpo
2) Translação instantânea
r
ω = 0 velocidade angular nula
r
vP ≠ 0 velocidade igual para todos os pontos do corpo
3) Rotação instantânea
r
ω ≠ 0 velocidade angular diferente de zero
r r
ω ⋅ vP = 0 velocidade nula (nos pontos do eixo instantâneo de rotação) ou
r
perpendicular a ω (nos pontos fora do eixo instantâneo de rotação)
4) Rotação + translação instantâneas ou movimento helicoidal instantâneo
r
ω ≠ 0 velocidade angular diferente de zero
r r
r
ω ⋅ vP = 0 velocidade sempre diferente de zero e nunca perpendicular a ω (nos pontos
do eixo helicoidal instantâneo é paralela a este)
II.2 Fórmula de propagação de velocidades dos pontos de um corpo rígido
No caso geral, caso 4, o movimento de um corpo rígido pode considerar-se resultante
de dois outros, translação na direcção do eixo helicoidal instantâneo mais rotação em
torno deste (Fig. II-1), e portanto
r
r
r
v A = vQ + ω × QA
26
(II-1)
r
r
r
vB = vQ + ω × QB
(II-2)
e portanto
(
r
r
r
r
r
r
vB = v A + ω × QB − ω × QA = v A + ω × QB − QA
)
(II-3)
ou seja
r
r
r
vB = v A + ω × AB
(II-4)
Eixo helicoidal instantâneo
r
ω
r
vB
r
vQ
Q
r
vQ
B
r
vQ
A
r
vA
r
ω × QA
Fig. II-1
II.3 Fórmula de propagação de acelerações dos pontos de um corpo rígido
Derivando a Eq. II-4 em ordem ao tempo, resulta
r
r d AB
r
r
aB = a A + α × AB + ω ×
dt
(II-5)
r
sendo α a aceleração angular do corpo.
Sendo O for um ponto fixo
AB = OB − OA
e
27
(II-6)
r
d AB d OB d OA r r
=
−
= vB − v A = ω × AB
dt
dt
dt
(II-7)
Substituindo na Eq. II-5, fica
(
r
r r
r
r
aB = a A + α × AB + ω × ω × AB
)
(II-8)
Esta é a fórmula de propagação de acelerações dos pontos de um corpo rígido, que
pode ainda ser escrita na forma
(
)
r
r
r
r
r
aB = a A + α × AB + ω ⋅ AB ω − ω 2 AB
(II-9)
r
No caso do movimento plano é ω ⊥ AB , pelo que a equação se simplifica
r
r
r
a B = a A + α × AB − ω 2 AB
28
(II-10)
Baixar