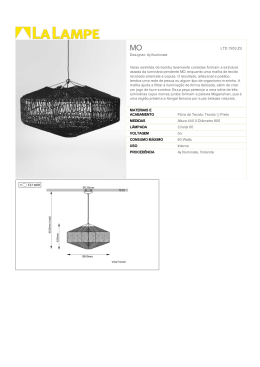
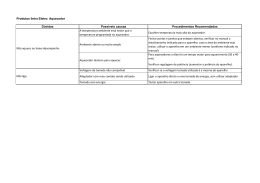
EME905 CONTROLE DE SISTEMAS MECÂNICOS 2013 Projeto de EME905 Projetar um controlador sobre a temperatura de saída da água de um aquecedor a gás. 1) O sistema a controlar O sistema a controlar é representado na Figura 1. Trata-se de um aquecedor a gás onde se deseja manter a temperatura de saída da água (To) num certo valor constante, agindo através da válvula (V1) sobre a pressão de alimentação de gás aos queimadores (p2). O sistema está sujeito a perturbações de temperatura da água de alimentação à caldeira (Ti) e de pressão de suprimento do gás aos queimadores (p1). Na figura 2 mostra-se a representação por diagrama de blocos do sistema, fazendo aparecer os componentes relevantes. Gv(s) representa a função de transferência da válvula de controle; Gpt(s) a transferência entre a pressão de gás dos queimadores e a temperatura de saída da água; Gtt(s) a relação entre as temperaturas de entrada e saída da água. U(s) representa o sinal de controle, P1(s) e Ti(s) as perturbações já mencionadas e To(s) a temperatura a controlar. Água de alimentação To Ti p1 V1 p2 Figura 1: Representação esquemática do aquecedor. Prof. José Juliano EME905 CONTROLE DE SISTEMAS MECÂNICOS 2013 Dados do Sistema: 1) Pressão máxima na saída da válvula 5 kPa; 2) Temperatura máxima do aquecedor 80 oC; Ti(s) Gtt(s) D P1(s) U(s) + Gv(s) D + + P2(s) Gpt(s) D To(s) + Figura 2: Diagrama de blocos do sistema a controlar. Consideram-se mensuráveis as variáveis To(t), Ti(t) e p2(t) e as funções de transferência dos blocos da figura 2 vêm dadas por: Gv s 2) 5 10 1 ; G pt s ; Gtt s 2s 1 100s 1 50 s 1 As especificações de controle Deseja-se projetar um sistema de controle que atenda ao seguinte conjunto de especificações: 1. Erro nulo em regime permanente para referências com perturbações constantes e limitado para perturbações em rampa; 2. Resposta transitória não oscilatória, caracterizada por um tempo de resposta A vezes menor que o de malha aberta; 3. Rejeição da perturbação de pressão em tempo compatível com o tempo de resposta da válvula (ex. A s); 4. Rejeição da perturbação de temperatura de entrada da água de alimentação no menor tempo possível, considerando a disponibilidade de instrumento para medi-la. Prof. José Juliano EME905 CONTROLE DE SISTEMAS MECÂNICOS 2013 Tabela 1 - Especificações de desempenho. Para o menor no. do aluno A na equipe 12140 a 15883 1 15886 a 18280 2 18510 a 26449 3 Obs: - Temperatura da água na saída: To=0,7143N+11,4286 - Temperatura da água na entrada: Ti=0,7143N+1,4286 Com N igual aos dois primeiros dígitos do menor número do aluno na equipe. 3) Data de entrega Desenvolvimento teórico e simulações em malha aberta: 07/06/2013 na Secretaria do IEM até às 17 h; Projeto completo (malha aberta e fechada): 05/07/2013 na secretaria do IEm até às 17 h. 4) Apresentar um documento em Word contendo: 1. apresentar o desenvolvimento teórico e demais cálculos para a realização do trabalho; 2. o diagrama de bloco em malha aberta; 3. o diagrama de bloco em malha fechada; 4. análise conclusiva sobre o desempenho do sistema compensado. 5) Determinar: 1. a resposta em malha aberta com pertubações em ±2 %, ±5 %, ±10 % do valor de regime; 2. Projetar os compensadores usando o método do lugar das raízes para que o sistema compensado atenda as especificações de desempenho; 3. Verificar o comportamento do sistema compensado as mesmas excitações de malha aberta; 4. Fazer uma análise conclusiva sobre o sistema compensado. Prof. José Juliano EME905 CONTROLE DE SISTEMAS MECÂNICOS 2013 6) Observações: todo o trabalho deve ser desenvolvido usando o MATLAB; entregar uma versão eletrônica (CD) contendo o relatório (Word) e os programas em MATLAB e dos diagramas de blocos simulados; apresentar um parecer conclusivo sobre o desempenho do sistema e qual ação de controle deve ser implementada entre as propostas; todos os dados que não apresentados devem ser escolhidos pelas equipes, justificando a escolha; o trabalho deve ser desenvolvido em equipe de até três alunos; citar toda a bibliografia consultada (artigos, livros, dissertações, tese, site da internet e outros). 7) Bibliografia: Coughanowr, D. R., Koppel, L. B. (1978), Análise e Controle de Processos, Editora Guanabara dois, Rio de Janeiro, 474p; Ogata, K. (1996), Engenharia de Controle Moderno, 3a. edição, Prentice Hall, Rio de Janeiro, 1998; Prof. José Juliano
Baixar