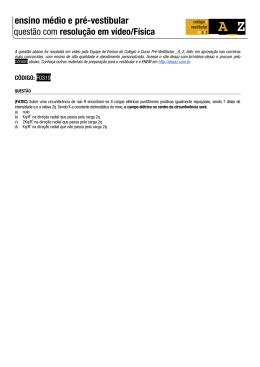
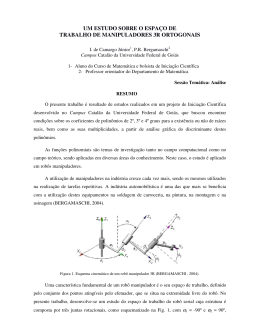
CONVÊNIOS CNPq/UFU & FAPEMIG/UFU Universidade Federal de Uberlândia Pró-Reitoria de Pesquisa e Pós-Graduação DIRETORIA DE PESQUISA COMISSÃO INSTITUCIONAL DE INICIAÇÃO CIENTÍFICA 2008 – UFU 30 anos MODELO PARA CÁLCULO DO VOLUME DO ESPAÇO DE TRABALHO DE MANIPULADORES 3R Kuang hongyu Faculdade de Matemática-UFU - Av. João Naves de Ávila, 2160, Santa Mônica, Uberlândia, MG, Brasil. [email protected] Sezimária de Fátima Pereira Saramago Faculdade de Matemática-UFU - Av. João Naves de Ávila, 2160, Santa Mônica, Uberlândia, MG, Brasil. [email protected] Resumo. O objetivo deste trabalho é estudar um modelo para cálculo do volume do espaço de trabalho de manipuladores 3R. O modelo geométrico direto do manipulador é desenvolvido e também uma formulação que permite calcular as envoltórias. O estudo da envoltória é de fundamental importância para o desenvolvimento do projeto de um manipulador, pois representa a fronteira de seu espaço de trabalho. Normalmente, o espaço de trabalho pode apresentar regiões vazias e também regiões de singularidade, que são os pontos de cúspide. A presença de vazios, de singuralidades e descontinuidades na geração da envoltória, aumentam a complexidade da formulação algébrica capaz de obter um modelo matemático preciso para o cálculo do volume do espaço de trabalho. Para validar a metodologia desenvolvida, simulações numéricas são apresentadas. Palavras-chave: robôs, manipuladores, volume do espaço de trabalho, singuralidades, envoltórias. 1. Introdução Um robô é um manipulador reprogramável automático, multifuncional, de vários graus de liberdade, capaz de manipular materiais, ferramentas ou dispositivos especiais, durante um ciclo de movimentos variados e programados para a execução de diversas tarefas. Desta forma, robôs são máquinas controladas por computador que são programadas para mover, manipular objetos, e efetuar trabalhos enquanto interagem com o ambiente à sua volta. Em um robô manipulador comum, o efetuador, que pode ser uma ferramenta qualquer, é precedido por um conjunto de segmentos, que realizam seus movimentos por meio de servomotores elétricos ou por comandos hidráulicos e pneumáticos (atuadores). As conexões entre os segmentos são denominadas juntas (ou articulações). Basicamente, um robô pode ser dividido em três partes fundamentais: mecanismo, acionamento e sistema de controle. Mecanismo é a parte que tem liberdade de movimento, pode ser dividido em três partes: braço, punho e efetuador. O Acionamento é responsável pela movimentação física de cada junta do mecanismo, assim como de alguns efetuadores. Tem como principal função transformar energia elétrica, hidráulica, pneumática, ou uma combinação destas em energia cinética. O Sistema de controle responde pela coordenação e controle do movimento do efetuador, objeto responsável pela execução da tarefa final de aplicação do robô. Neste estudo é apresentado um modelo para cálculo do volume do espaço de trabalho de manipuladores 3R. Com esta finalidade o modelo geométrico direto (MGD) do manipulador é desenvolvido, a partir do qual se obtém uma formulação que permite calcular as envoltórias do espaço de trabalho (Bergamaschi, 2004). Esta pesquisa propõe uma formulação numérica para aproximar o cálculo da área da seção radial, através de sua discretização em uma malha retangular. Finalmente o volume do espaço de trabalho é calculado como o volume do sólido de revolução obtido pela rotação da seção radial. 2. Modelo Geométrico de Manipuladores 3R Uma representação bastante usual para descrever geometricamente um robô utiliza a notação de Denavit e Hartenberg, conforme exibido na Fig. 1. Esta notação basicamente consiste em construir a matriz de transformação homogênea, Ti i−1 , que representa o sistema XiYiZi, associado ao i-ésimo membro do robô, em relação ao sistema Xi-1Yi-1Zi-1, associado ao (i-1)-ésimo membro, para cada i variando de 1 a n, onde n é o grau de liberdade do robô. Figura 1. Notação de Denavit e Hartenberg para manipuladores. Na Fig. 1. pode-se observar que a representação do sistema XiYiZi em relação ao sistema Xi1Yi-1Zi-1 percorre quatro etapas bem definidas, representadas pelos quatro parâmetros cinemáticos αi-1, ai-1, di e θi, que também são conhecidos por parâmetros de Denavit-Hartenberger. Conseqüentemente, a construção da matriz de transformação homogênea Ti i−1 depende da maneira como essas etapas são percorridas. Neste trabalho, esta matriz é construída efetuando a seguinte ordem de execução das etapas: 1- uma rotação horária de αi-1 em torno do eixo Xi-1, denotada por Rot(αi-1, Xi-1); 2- uma translação de ai-1 unidades sobre o eixo Xi-1, denotada por Trans(ai-1, Xi-1) ; 3- uma translação de di unidades ao longo do eixo Zi, denotada por Trans(di, Zi) ; 4- uma rotação anti-horária de θi em torno do eixo Zi, denotada por Rot(θi, Zi). Portanto, a matriz de transformação homogênea genérica de um sistema de referência em relação ao precedente assume o seguinte aspecto: Ti −i 1 = Rot (α i , X i −1 ) Trans ( a i −1 ,0,0) Trans (0,0, d i ) Rot (θ i , Z i ) Cθ i Sθ Cα i −1 = i − Sθ i Sα i −1 0 − Sθ i 0 Cθ i Cα i −1 − Cθ i Sα i −1 0 Sα i −1 Cα i −1 0 (1) d i Sα i −1 d i Cα i −1 1 a i −1 2 onde a0 = α0 = 0, d1 = 0, Sθi = senθi, Cθi = cosθi, i = 1, 2, 3; Sαj = senαj e Cαj = cosαj, j = 1, 2. Por fim, a matriz de transformação homogênea que representa a ponta do robô em relação à base, T0n , pode ser obtida através da seguinte expressão (Saramago e Steffen Júnior, 1999): T0n = T01 T12 T23 K Tnn−1 (2) A cinemática do robô manipulador 3R é feita com o auxílio de quatro sistemas de referência. O primeiro associado à base, indicado por X0Y0Z0; o segundo associado à primeira junta, indicado por X1Y1Z1; o terceiro associado à segunda junta, indicado por X2Y2Z2 e o quarto associado à terceira, indicado por X3Y3Z3. L0, L1 L2 L3 L4 d2 r2 d3 r3 d4 H Z4 X4 Figura 2. Representação do modelo geométrico para manipulador 3R Observe, na Fig. 2, que o sistema X1Y1Z1 tem origem e eixo Z coincidentes com os da base. Como a junta é rotacional, a única diferença entre os dois sistemas é o ângulo de rotação θ1 em torno do eixo Z1. Assim, a matriz de transformação homogênea do sistema X1Y1Z1 em relação à base é determinada da seguinte forma: Cθ1 − Sθ 1 Sθ Cθ 1 T01 = Rot (θ 1, Z1 ) = 1 0 0 0 0 0 0 0 0 1 0 0 1 (3) Considere, tanto na representação do sistema X2Y2Z2 em relação ao sistema X1Y1Z1 quanto na representação do sistema X3Y3Z3 em relação ao sistema X2Y2Z2, que os parâmetros de DenavitHartenberger são diferentes de zero. Portanto, as respectivas matrizes de transformação homogênea são dadas por Cθ 2 Sθ Cα 1 T12 = 2 − Sθ 2 Sα 1 0 − Sθ 2 0 Cθ 2 Cα 1 Sα 1 − Cθ 2 Sα 1 Cα 1 0 0 d 2 Sα 1 d 2 Cα 1 1 a1 (4) 3 Cθ 3 Sθ Cα 3 2 T23 = − Sθ 3 Sα 2 0 − Sθ 3 Cθ 3 Cα 2 Sα 2 − Cθ 3 Sα 2 0 Cα 2 0 0 a2 d 3 Sα 2 d 3 Cα 2 1 (5) Considere, agora, um ponto H no sistema X3Y3Z3, que pode ser escolhido como o centro do efetuador ou a ponta do efetuador ou ainda o fim do próprio manipulador. Por se tratar do sistema X3Y3Z3, este ponto será denotado por H3 e representado por : a 3 0 H3 = . 0 1 (6) Note que a3 deve ser diferente de zero. Caso contrário, H3 seria a origem do sistema X3Y3Z3, não sofrendo assim nenhum movimento decorrente da terceira junta, o que não é de interesse prático. Utilizando a Eq. (2), a representação vetorial de H3 em relação à base, denotada por H0, é obtida da seguinte forma: (7) H 0 = T01 T12 T23 H 3 Expandindo a Eq. (7), obtém-se: H 2x a3 Cθ 3 + a 2 y a Sθ Cα + d Sα H 3 2 3 2 H 2 = 2z = T23 H 3 = 3 H − a S θ S α + d C α 3 3 2 3 2 2 1 1 , (8) H 1x H 2x Cθ 2 − H 2y Sθ 2 + a1 y x y z H1 H 2 Sθ 2 Cα 1 + H 2 Cθ 2 Cα 1 + H 2 Sα 1 + d 2 Sα 1 2 H1 = = T1 H 2 = H z − H x Sθ Sα − H y Cθ Sα + H z Cα + d Cα 2 2 1 2 1 2 1 2 1 2 1 1 1 (9) e, por fim H 0x H1x Cθ 1 − H1y Sθ 1 y x H H Sθ 1 + H1y Cθ 1 H 0 = 0z = T01 H1 = 1 H H 1z 0 1 1 (10) que é a representação vetorial desejada. As coordenadas de H em relação aos eixos Xj, Yj e Zj são dadas pelas expressões de H jx , H yj e H zj , respectivamente. 3. Envoltórias do Espaço de Trabalho do Manipulador 3R O espaço de trabalho W(H) de um ponto H situado na extremidade do robô manipulador é o 4 conjunto de todos os pontos que H ocupa quando as variáveis de junta são variadas em todo os seus intervalos de definição (Gupta e Roth, 1982), representado na Fig.3.(a). (a) (b) Figura 3. (a) Espaço de trabalho de um robô 3R; (b) seção radial plana. O procedimento mais imediato para investigar o espaço de trabalho é variar os ângulos θ1, θ2 e θ3 sobre seus intervalos de definição e estimar as coordenadas do ponto H com respeito à base do manipulador. Desta maneira, obtém-se a posição do efetuador. A Fig. 3.(a) exibe o espaço de trabalho seccionado de um determinado manipulador 3R. Como pode se ver, o espaço de trabalho deste tipo de robô é um sólido de revolução, tendo Z1 como o seu eixo de revolução. Desta forma, é natural imaginar que o espaço de trabalho é o resultado da rotação, em torno do eixo Z1, de uma seção radial plana que funcione como uma seção geratriz. A Fig. 3.(b) esboça a seção radial relativa ao espaço de trabalho exibido na Fig. 3.(a). Então, o espaço de trabalho de robôs com estrutura 3R pode ser obtido por intermédio da extensão radial r e da extensão axial z com respeito à base (Bergamaschi, 2004). Para esta representação, r é a distância de um ponto genérico do espaço de trabalho ao eixo Z1 e z é a distância desse mesmo ponto ao plano X1Y1 (veja Fig. 3.(b)). Assim, usando a Eq. (10), as equações paramétricas (de parâmetrosθ2 e θ3) do lugar geométrico descrito pelo ponto H sobre um plano radial são r 2 = H x 0 z = H 1z ( ) + (H ) = (H 2 y 2 0 θ − H 1y Sθ 1 ) + (H ( ) x 1C 1 2 x 1S 1 θ + H 1y Cθ 1 ) = (H ) + (H ) 2 x 2 1 y 2 1 (11) Usando a Eq. (9), obtém-se ( ) + (H ) 2 r 2 + z 2 = H 2x y 2 2 + a12 + H 2z + d 2 2 ( + 2 a1 H 2x Cθ 2 − H 2y Sθ 2 e, pela metodologia matemática, admitindo que a1 ≠ 0 e das Eqs. (11) por 2 a1 / sen α1 e usando a Eq. (9), resulta ( ) sen α 1 ≠ 0 , 2 a1 2 a1 H 2z + d 2 cos α 1 z− = − 2 a1 H 2x sen θ 2 + H 2y cos θ 2 sen α 1 sen α 1 ( ). ) (12) multiplicando a segunda equação (13) Observe que no caso a1 = 0 e senα1= 0, ocorreria apenas uma translação entre a primeira e a segunda junta, o que não é interessante. Agora, elevando ao quadrado, membro a membro, as Eqs. (12) e (13) e somando as equações resultantes, obtém-se a seguinte equação [ f et ( r , z, θ 3 ) = r 2 + z 2 − A ] 2 + [C z + D ] + B = 0 2 (14) 5 onde 2 2 A = H 2x + H 2y + a12 + H 2z + d 2 2 x 2 y 2 B = −4 a1 H 2 + H 2 ; 2 a1 C = sen α ; 1 z D = − 2 a1 H 2 + d 2 cos α 1 . sen α 1 ( ) ( ) ( ( ) ( ) ( ) 2 ; (15) ) Os coeficientes A, B, C e D são chamados coeficientes estruturais do manipulador. Eles dependem, no caso do manipulador 3R, dos parâmetros dimensionais (que são fixos) da cadeia cinemática do robô e da variável rotacionalθ3, como pode ser observado, com auxílio da Eq. (8), na forma escrita abaixo 2 2 2 2 2 A = a1 + a 2 + a 3 + d 2 + d 3 + 2 a 2 a 3 cos θ 3 + 2 d 2 d 3 cos α 2 − 2 d 2 a3 sen θ 3 sen α 2 ; B = − 4 a12 (a3 cos θ 3 + a 2 )2 + (a 3 sen θ 3 cos α 2 + d 3 sen α 2 )2 ; 2 a1 C = sen α ; 1 D = − 2 a1 (− a 3 sen θ 3 sen α 2 + d 3 cos α 2 + d 2 )cos α 1 . sen α 1 [ ] (16) A Eq. (14) representa a equação do lugar geométrico descrito pelo ponto H no semiplano radial do sistema X0Y0Z0. Ela pode ser pensada como sendo a equação de uma família de curvas planas fet(r, z, θ3) = 0, no plano rz, de parâmetroθ3. A Fig. 4 ilustra uma tal família de curvas que está contida na seção radial do espaço de trabalho de um particular robô manipulador 3R, cujos parâmetros de projeto são: a1 = 3.0, a2 = 1.0, a3 = 0.5, d2 = 1.0, d3 = 1.0, α1 = 60° e α2 = 60°. Figura 4. Família de curvas contida na seção radial do espaço de trabalho de um particular manipulador 3R. 6 4. Volume de Espaço de Trabalho O volume do espaço de trabalho, V, é o volume do sólido de revolução obtido pela rotação da seção radial em torno do eixo Z1. Assim, usando o Teorema de Pappus-Guldin, em acordo com o esquema mostrado na Fig. 5, o volume é dado através da equação: (17) V = 2 π rg A, onde A é a área da seção radial plana que é coberta pela família de curvas. Figura 5. Obtenção do volume de um sólido de resolução Este estudo utiliza uma formulação numérica para aproximar o cálculo da área da seção radial, através de sua discretização em uma malha retangular. Inicialmente, deve-se obter os valores extremos dos vetores r e z, ou seja, rmin = min {r } e rmax = max {r } , z min = min {z} e z max = max {z} . (18) Adotando-se o número de sub-intervalos desejados para a discretização ao longo de r e z (nr e nz), pode-se calcular as dimensões das áreas elementares da malha: ∆r = rmax − rmin nr e ∆z = z max − z min nz . (19) Considerando, r 2 = H x 1 z z = H 1 2 y 2 1 ( ) + (H ) . (20) A Eq. (20) permite calcular todos os pontos da família de curvas que compõem a seção radial do espaço de trabalho. Assim dado um determinado ponto (r, z), determina-se sua posição dentro da malha de discretização, conforme Fig. 6, através do seguinte controle de índices: r − rmin i = int +1 e ∆r z − z min j = int +1 . ∆z (21) 7 z Pij = 1 zmax j+1 ∆z Pi+3 , j-1 = 0 j j-1 zmin rmin i-1 i i+1 rmax r ∆r Figura 6. Discretização da seção radial usando malha retangular. Conforme mostrado no esquema da Fig. 6, o ponto da malha que pertence ao espaço de trabalho será identificado como Pij = 1, do contrário terá valor nulo, ou seja: 0 se Pij ∉ W ( H ) Pij = 1 se Pij ∈ W ( H ) (22) Desta forma a área total será obtida pela soma de todas as áreas elementares da malha que estão contidas, totalmente ou parcialmente, na seção radial. Na Eq. (23), observa-se que apenas os pontos pertencentes ao espaço de trabalho contribuem para o cálculo da área. Já a coordenada do baricentro é calculada considerando a soma dos baricentros de cada área elementar, dividida pela área total: imax j max imax j max A = ∑∑ (Pij ∆r ∆z ) ; rg = i =1 j =1 ∑ ∑ (P ij i =1 j =1 ∆r ∆r ∆z ) (i − 1) ∆r + + rmin 2 A (23) Finalmente, conhecendo-se os valores da área e do baricentro da seção radial, pode-se calcular o volume do espaço de trabalho do manipulador usando a Eq. (17). 5. Simulações Numéricas A metodologia desenvolvida foi aplicada para calcular o volume do espaço de trabalho de alguns tipos de manipuladores, variando os parâmetros de Denavit-Hartenberg. Os cálculos foram feitos utilizando um programa de Matlab, desenvolvido pelos autores. Considere os seguintes exemplos numéricos: Exemplo 1: parâmetros: a1 =3.0, a2 =1.0, a3 =0.5, d2=1.0, d3=1.0, α1= 60° e α2 = 60°, área = 5.8388 u.a.; rg= 3.2712 u.m. volume do espaço de trabalho: V= 120.0081 u.v. 8 Figura 7. Seção radial do manipulador do Exemplo 1 Exemplo 2: parâmetros: a1=1.0, a2=3.0, a3=4.0, d2=9.0, d3=0, α1= -90° e α2 = 90°, área = 52.6476 u.a.; rg= 9.4277 u.m. volume do espaço de trabalho: V= 3118.6325 u.v. Figura 8. Seção radial do manipulador do Exemplo 2 Exemplo 3: parâmetros: a1=1.0, a2=3.0, a3=4.0, d2=2.0, d3=0, α1= -90° e α2 = 90°, área = 52.7118 u.a.; rg= 4.4122 u.m. volume do espaço de trabalho: V= 1461.3118 u.v. Figura 9. Seção radial do manipulador do Exemplo 3 9 6. Conclusão Neste trabalho foi estudado um modelo para cálculo do volume do espaço de trabalho de manipuladores 3R. Com esta finalidade, o modelo geométrico direto do manipulador foi desenvolvido e também uma formulação algébrica para obter as envoltórias. Uma formulação numérica foi utilizada para aproximar o cálculo da área da seção radial, através de sua discretização em uma malha retangular. O volume do espaço de trabalho foi calculado como o volume do sólido de revolução obtido pela rotação da seção radial. Na continuidade desta pesquisa, será estudada as diversas topologias deste tipo de manipulador. 7. Agradecimentos Os autores agradecem à Fundação de Amparo à Pesquisa de Minas Gerais (Fapemig) pelo apoio financeiro a este trabalho (número do processo:A-013/2008). 8. Bibliografia Baili, M., Wenger Ph., Chablat D., 2004, "Analise et Classification de Manipulateur 3R à axes Orthogonaux", Thèse de Doctorat - University of Nantes, France. Bergamaschi, P. R., 2004, “Projeto Ótimo de Manipuladores 3R Considerando Características de seu Espaço de Trabalho”, Tese de Doutorado – Universidade Federal de Uberlândia, Uberlândia, MG, Brasil. Gupta K.C., Roth B.,1982, “Design Considerations for Manipulator Workspace”, ASME Jnl of Mechanical Design, Vol. 104, pp.704-711. MODEL FOR CALCULATION OF THE WORKSPACE VOLUME OF MANIPULATORS 3R Kuang hongyu Faculdade de Matemática-UFU - Av. João Naves de Ávila, 2160, Santa Mônica, Uberlândia, MG, Brasil. [email protected] Sezimária de Fátima Pereira Saramago Faculdade de Matemática-UFU - Av. João Naves de Ávila, 2160, Santa Mônica, Uberlândia, MG, Brasil. [email protected] Abstract: The objective of this work is studying a model for calculating the workspace volume of manipulators 3R. The model geometric direct of the manipulator is developed and is also presented a formulation to calculate the workspace envelope . The envelope study is of fundamental importance to the development of the manipulators design, as it represents the border of their workspace. Normally, the workspace can present empty regions (voids) and regions of singularity, which are cusp points. The presence of voids and singularities and the discontinuous generation of the envelope greatly increase the complexity of the calculation of the algebraic formulation for a correct mathematical model of the workspace volume. To validate the methodology developed, numerical simulations are presented. Keywords: robot, manipulators, workspace volume, singularity , envelope. 10
Baixar