Licenciatura em Engenharia Electrónica – LEE -- IST
Fundamentos de Controlo
1º semestre 2013-2014
Sistema de controlo de temperatura
Guia de trabalho de Laboratório
elaborado por:
Eduardo Morgado
Novembro 2013
1
Notas preliminares
As questões identificadas com (T) são fundamentais para a realização do trabalho sendo portanto
necessária a sua resolução antes da sessão de laboratório.
(E) e (C) indicam questões respectivamente de obtenção de dados experimentais (ou simulados) e
comentários.
Devem ser entregues os seguintes relatórios:
• Pré-relatório: a entregar no dia da sessão de laboratório com respostas às questões (T)
• Relatório final com resultados e comentários às questões (E) e (C) : a entregar ao docente
na primeira aula teórica da semana seguinte à da sessão de Laboratório.
• Todos os relatórios devem incluir uma capa identificadora, formato: Capa de Relatório
• È conveniente trazer uma pen para recolher os resultados obtidos no laboratório
Objectivos
•
•
•
Modelização e análise dinâmica de um sistema de controlo.
Projecto de um controlador.
Utilização do Matlab e Simulink
1 Apresentação:
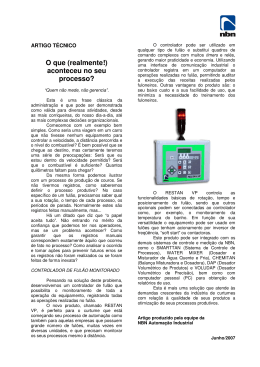
Considere o sistema representado esquematicamente na figura:
Θa
I
R
Potenciómetro
Controlador
Amplificador
de
Potência
Q
Qo
Qi
Θ
Sensor
de
Temperatura
Pretende-se controlar a temperatura de um fluido (gás ou líquido) existente no interior de
um contentor.
O aquecimento é efectuado por meio de uma resistência eléctrica Re percorrida por uma
corrente eléctrica I produzida por um andar de potência (efeito Joule).
A temperatura no interior do contentor é medida por um sensor que traduz temperatura
num sinal de tensão eléctrica.
A tensão de saída do sensor é comparada com uma tensão de referência num bloco
controlador. A tensão de referência é gerada por um potenciómetro de comando.
2
As grandezas relevantes para efeitos de controlo são as seguintes:
Q:
Qi :
Qo :
Θ:
Θa :
Re :
C:
Rt :
fluxo de calor gerado pela resistência eléctrica (J/s)
fluxo de calor absorvido pelo fluido interno (J/s)
fluxo de calor que se escapa para o ambiente (J/s)
temperatura do fluido interno (oC)
temperatura ambiente (oC)
resistência eléctrica do aquecedor (Ω)
capacidade térmica do fluido interno (J/ oC)
resistência térmica da parede do contentor (oC/J/s)
Das leis da termodinâmica sabe-se que:
Q(t) = Qi (t) + Qo(t)
Qi (t) = C dΘ/dt
(conservação da energia)
(o ritmo de variação da temperatura de uma substância é proporcional ao
fluxo de calor absorvido)
(o fluxo de calor através de uma substância é proporcional à
Qo(t) = [Θ(t) - Θa(t)] / Rt
diferença de temperaturas)
2
A lei de Joule diz-nos que: Q = Re . I
No estabelecimento do modelo, são feitos alguns pressupostos. Considera-se que no fluido os
fenómenos de convecção estabelecem muito rapidamente uma temperatura uniforme em volume.
Despreza-se a capacidade térmica da parede do contentor devido a possuir habitualmente uma
massa relativamente pequena quando comparada com a do fluido no seu interior. A temperatura
mantem-se num intervalo de valores para o qual o mecanismo de radiação térmica é desprezável.
2 Modelização (sistema em malha aberta, i.e., sem controlo da temperatura)
2.1
(T)- Determine a equação diferencial linear que relaciona as variáveis Θ, Q e Θa.
apresentando os cálculos e raciocínios que teve de realizar.
f(dΘ/dt, Θ, Θa, Q) = 0
2.2
(T) - Determine a equação diferencial não linear que relaciona as variáveis Θ, I e Θa.
apresentando os cálculos e raciocínios que teve de realizar.
g(dΘ/dt, Θ, Θa, I) = 0
2.3 (T) - Deduza uma equação diferencial linear que descreva aproximadamente, do ponto de
vista dinâmico, o comportamento do sistema em torno de um ponto de funcionamento
e
nominal correspondente a um valor de equilíbrio I da corrente, admitindo desvios de
pequena amplitude. Designe as variáveis incrementais no domínio do tempo por letras
e
e
e
minúsculas: q, qi, qo, i, θ, θa. ( Q = Q + q ; I = I + i ; Θ = Θ + θ ; ...)
h(dθ /dt, θ, θa, i) = 0
3
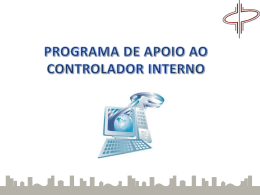
2.4
(T) - A partir do resultado da alínea anterior obtenha as funções de transferência G1(s) e
G2(s) assinaladas no diagrama de blocos da figura e comente a sua estabilidade.
Θa(s)
G2(s)
I(s)
+
G1(s)
Θ(s)
+
Note que:
G1 ( s ) =
θ( s )
I( s ) θ
,
G2 ( s ) =
a =0
θ( s )
θ a ( s ) i =0
2.5 (T) - Suponha agora que o contentor apresentava um isolamento térmico perfeito (Qo=0,
Rt= ∞). Repita a alínea anterior e comente o significado prático do resultado.
3 Simulação do sistema em malha aberta
A simulação dos sistemas estudados será feita no MATLAB
Faça:
Rt = 0,5 ºC/J/s , C = 20 J/ºC , Re = 1 Ω , Ie = 10 A
3.1(T) - Determine a temperatura nominal de equilíbrio do fluido interno Θe correspondente ao
e
valor nominal da corrente I = 10A para uma temperatura ambiente Θa = 20oC.
Concretize numericamente as funções G1(s) e G2(s).
3.2
(E) - Observe e registe a resposta das funções G1(s) e G2(s) ao escalão unitário. Recorde que
o que vai observar são desvios em relação aos valores nominais.
No Matlab/Simulink implementar o sistema como indicado na figura seguinte, activar um
dos escalões de cada vez (colocar valor final zero no outro escalão) e realizar simulações.
4
4 - Simulação do sistema em malha fechada
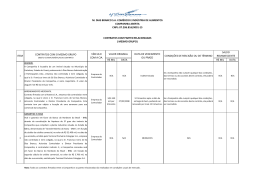
4.1 (T) Diagrama de blocos - No sentido de tentar fazer controlo da temperatura do fluido no
interior do contentor usaremos realimentação negativa e um controlador série C(s). Se admitirmos
(o que acontece muitas das vezes) que as dinâmicas tanto do sensor de temperatura como do
actuador (amplificador de potência) se comportam unicamente como ganhos nos regimes em que o
sistema vai funcionar, temos o seguinte diagrama de blocos:
Θa(s)
G2(s)
R(s) +
E(s)
Kt
C(s)
I(s)
Ka
+
G1(s)
+
-
R: referência
Θ : temperatura do fluido interno
Θa : perturbação exterior
Ka = 1 A/V
Θ(s)
Kt = 10-3 V/oC
Aplicando o princípio da sobreposição determine as seguintes funções de transferência em cadeia
fechada como função de C(s):
Gcf1(s) = Θ(s)/R(s) para Θa = 0
(seguimento da referência)
Gcf2(s) = Θ(s)/ Θa(s) para R = 0
(efeito da perturbação)
Nota: No diagrama acima a constante do sensor de temperatura Kt surge na cadeia de acção porque a
constante do transdutor de entrada (potenciómetro) tem valor idêntico, o que permite obter um diagrama de
blocos equivalente com aquela estrutura.
4.2 Controlador Proporcional, C(s) = K.
No Matlab/Simulink implemente o diagrama de blocos como indicado na figura seguinte,
activando alternadamente os escalões e realizando simulações.
5
4.2.1
(E, C) - Observe e registe a resposta das funções Gcf1(s) e Gcf2(s) ao escalão unitário para
os valores de ganho do controlador K = 150 ; K = 1500.
No que se refere ao seguimento da referência R comente a variação do erro em regime
permanente com o valor de K
No que se refere ao efeito da perturbação (variação θa da temperatura exterior), compare o
comportamento agora observado com o obtido em 3.2 com o sistema em malha aberta.
Apoie os seus comentários com os cálculos convenientes.
4.3 - Controlador Integral, C(s) = K/s
4.3.1
(T) – Com C(s) = K/s, determine a equação característica em função de K e os pólos de
Gcf1(s) para os seguintes valores do ganho K: K1=0; K2=2; K3=2,5; K4=5; K5 = 50.
Represente no plano complexo os pólos calculados, e desenhe uma linha que indique a
localização dos pólos da malha fechada quando se varia o ganho K. Mostre que o sistema
(modelo) é estável para todo o K positivo.
4.3.2
(E, C) - Observe e registe a resposta das funções Gcf1(s) e Gcf2(s) ao escalão unitário para
os valores de ganho do controlador: K = 2; K = 50.
No Matlab/Simulink modificar o bloco Controlador K (ver figura em 4.2) adicionando um
integrador:
Conclua sobre a vantagem de utilizar o Controlador Integral no sentido de melhorar o
desempenho em regime permanente no seguimento da referência e na rejeição da
perturbação. Apoie os seus comentários com os cálculos convenientes.
4.3.3 (E, C) - Para K = K2, K3, K4 e K5, simule e registe as respostas do sistema em cadeia
fechada, Gcf1(s), a uma referência escalão unitário. Comente os resultados observados
tendo em conta 4.3.2 e 4.3.3.
4.4 Amplificador de potência como sistema de 1ª ordem
4.4.1 (T) - Suponha agora que o Actuador (amplificador de potência) não pode ser considerado
do ponto de vista dinâmico como um ganho, mas sim descrito por uma função de transferência da
forma:
a
Gact =
= Ka(s)
a=1
s+a
Calcule a nova função de transferência do sistema em cadeia fechada Gcf1(s) mantendo o
controlador C(s) = K/s.
6
4.4.2
(E, C) - Simule e registe a resposta deste sistema ao escalão na referência..
No Matlab/Simulink substituir o bloco Gain2 (ver figura da alínea 4.2.1) por uma função
de transferência de primeira ordem:
Verifique que o sistema fica instável para valores elevados do ganho K. Determine em
simulação uma estimativa do ganho crítico.
Justifique o observado com a obtenção do ‘root-locus’ no Matlab. (note que o root-locus
se constrói a partir da função de transferência da malha aberta)
Colocar o diagrama Simulink na configuração de malha aberta.
No Matlab, assumindo que o modelo Simulink tem o nome diagr usar o comando
rlocus precedido pelas conversões de modelo que a seguir se indicam:
>> [a,b,c,d]=linmod('diagr'); s= ss(a,b,c,d); sys=tf(s)
>> rlocus(sys)
Registe o root-locus
4.5 Projecto de um controlador Proporcional Integral
Nas condições de 4.4.1 (amplificador de potência de 1ª ordem), considere agora a utilização de um
controlador Proporcional Integral (PI) com função de transferência:
1
C( s ) = K p 1 +
Ti s
Este controlador contém a acção integral que se verificou anteriormente ter vantagens para o
regime permanente.
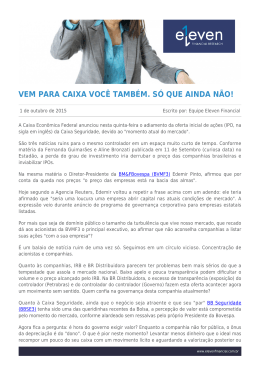
4.5.1 (T) - Mostre que este controlador pode ser implementado pelo circuito da Figura, admitindo
a aproximação ideal para os AMPOPs. Deduza as expressões que relacionam Kp e Ti com os
valores das resistências e dos condensadores: Kp =R2C1/R1C2, Ti = R3C1.
4.5.2 (T) - Mostre que a função de transferência do Controlador pode ser escrita na forma:
C( s ) = K .
(s+ z)
s
esta forma é mais confortável para os cálculos que se seguem.
7
4.5.3 (T) – Projecto: para um escalão na referência, r(t)=u(t), pretende-se que a resposta em
malha fechada θ(t) seja caracterizada pelas seguintes especificações:
Sobreelevação = 21%
tempo de estabelecimento (5%) = 15 seg
– Calcule os pólos de 2ª ordem associados àquelas especificações.
– Determine o polinómio característico do sistema em malha fechada como função dos
parâmetros K e z do controlador. Calcule os valores de K e de z para os quais o polinómio
contém as raízes anteriormente obtidas. Note que o sistema é de 3ª ordem.
4.5.4
(E, C) - Simule e registe a resposta θ(t) do sistema ao escalão na referência para aqueles
valores de parâmetros do controlador PI.
No Matlab/Simulink substituir o bloco integrador por
K
(s + z)
s
s+z
s
Controlador
PI
Verifique em simulação se as especificações de projecto são cumpridas.
Caso contrário:
i) Justifique o observado tendo em conta o conjunto dos pólos e zeros da malha fechada.
ii) Ajuste os parâmetros do controlador de forma a obter, em simulação, uma resposta mais
próxima da desejada.
iii) Justifique os procedimentos adoptados no ajuste de parâmetros do controlador apoiando-se
no ‘root-locus’.
iv) Registe a resposta que considere satisfatória e indique os correspondentes valores de
parâmetros do Controlador.
8
Baixar