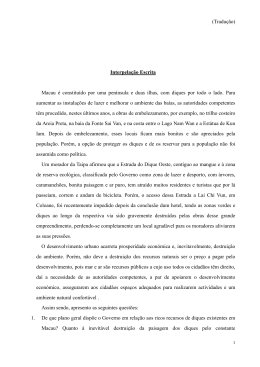
COMITÊ BRASILEIRO DE BARRAGENS XXV SEMINÁRIO NACIONAL DE GRANDES BARRAGENS SALVADOR, 12 A 15 DE OUTUBRO DE 2003 T92 - A17 UHE DE SOBRADINHO MONITORAMANTO REMOTO DOS PIEZÔMETROS DE TUBO ABERTO E MEDIDORES DE VAZÃO DOS DIQUES “A” E “B” Roberto Abraão de Azevedo Maia Ricardo José Barbosa de Souza José Marcelo Alves Monteiro CHESF José Fernando Bellini HYTRONIC RESUMO Nos diques A e B da Barragem de Sobradinho estão instalados, para acompanhamento das subpressões e das vazões de percolação, 62(sessenta e dois) piezômetros de tubo aberto e 07 medidores de vazão. As leituras eram feitas manualmente, tanto dos piezômetros quanto dos medidores de vazão, utilizando-se o “pio elétrico” e cronômetro / leitura das réguas para os medidores de vazão triangular e convencional. Em função da necessidade de um acompanhamento mais eficaz nessas leituras, maior confiabilidade nos dados, aumento da velocidade de análise, maior rapidez na tomada de decisões, facilidade de mudança na periodicidade de leituras e da escassez de recursos humanos especializados, a CHESF – Cia. Hidro Elétrica do São Francisco - optou por automatizar essas leituras. ABSTRACT In the A and dikes of the Sobradinho dam are installed, for monitoring of the uplift and the seepage discharge, 62 (sixty two) open standpipes and 07 (seven) discharge meters. The readings in the standpipe and in the discharge meters were made manually, using the “electric beep” and the gauge’s chronometer/reading for the triangular flow and conventional meters. In function of the necessity of a more accurate accompanying of these readings, greater data reliability, greater analysis speed, faster decision making, easier reading periodicity changing and the lack of specialized human resources, the CHESF – Hydroelectric Company of the São Francisco – opted for the automation of these readings. 1 1 – INTRODUÇÃO A Barragem de Sobradinho está localizada no Rio São Francisco, 60 Km a montante das cidades de Juazeiro –BA e Petrolina –PE. A região apresenta um clima árido, com precipitação média anual de 516 mm, evaporação de 3.265 mm. A área apresenta uma topografia suave, quebrada no local de implantação da usina, por alguns morros de quartzito, alinhados transversalmente ao rio e elevados cerca de 200 m acima do peneplano. As obras de terra se estendem por 13 Km, percorrendo por várias litologias e tipos de fundação, atravessando o rio e ligando os morros para propiciar a formação do reservatório. O reservatório tem capacidade de acumular cerca de 34 bilhões de m3 que assegura a regularização plurianual de uma vazão de 2.060 m3/s,para a geração nas 06 unidades de 175 MW, instaladas na Casa de Força da UHE de Sobradinho e em todas as demais usinas hidroelétricas a jusante, pertencentes à Companhia Hidroelétrica do São Francisco – CHESF. A Figura 1 mostra o arranjo geral dos principais estruturas da UHE de Sobradinho, constando dos Diques “A”, “B”, “C”, e “D”; Barragens Direita e Esquerda; Vertedouro de superfície, descarregador de fundo e Casa de Força a céu aberto. O projeto inclui também, Tomada D’água para irrigação e Eclusa para navegação. FIGURA 1 – Arranjo geral das principais estruturas da UHE Sobradinho As obras foram iniciadas em 1973 e em dezembro de 1977 começou o enchimento do reservatório. O nível máximo normal de operação, El 392,50 m, foi atingido em Julho de 1978 e a primeira unidade geradora entrou em operação em setembro de 1979. Desde então, para atender sua principal 2 função de regularização, o reservatório tem sido operado com oscilações no nível d’água que, no período crítico, chega a variar em até 12 m. No início de 1997 e em meados de 1998, observou-se elevação de subpressões no terreno de fundação, próximo ao pé de jusante dos Diques “A” e “B” respectivamente, implicando na instalação de novos piezômetros bem como medidores de vazão. Foram ainda executados poços de alívio no Dique “A” e uma trincheira drenante complementar no Dique “B”, com o objetivo de investigar as possíveis causas, aliviar e acompanhar as subpressões e de monitorar as vazões de percolação dos diques. O monitoramento das subpressões e das vazões de percolação é feito através de 62 (sessenta e dois) piezômetros de tubo aberto e 07 (sete) medidores de vazão, sendo 40 piezômetros.e 03 medidores de vazão no dique “A” e 22 piezômetros.e 04 medidores de vazão no dique “B”. Face às dificuldades de realizar as campanhas de leituras devido à escassez de recursos humanos especializados, falta freqüente de transporte, grande distância entre a Usina e os diques, dificuldade de variar a frequência das leituras e devido aos constantes erros e baixa confiabilidade das leituras, a CHESF optou por automatizar esses instrumentos. 2 – AUTOMAÇÃO O monitoramento das subpressões era realizado manualmente, utilizando-se o “pio elétrico” com um cabo graduado que por sua vez era introduzido no interior dos piezômetros para obtenção das leituras. Com relação ao cálculo das vazões, as leituras eram realizadas medindo-se, com régua graduada milimetricamente, a altura do nível d’água com relação ao vértice do medidor triangular. Os dados de campo eram digitados em planilhas eletrônicas e enviados para Recife onde eram processados. Essa metodologia possuía vários inconvenientes, tais como: • Tempo de processamento bastante lento; • Necessidade de mão de obra especializada; • Dificuldade de variar a periodicidade sem comprometer as atividades de manutenção civil; • Graduação do cabo sempre necessitando ajustes; • Réguas graduadas dos medidores de vazão constantemente danificadas pelo vandalismo; • Constantes erros de medição e de transcrição dos dados para as planilhas; • Necessidade constante de transporte, devido longa distancia entre a usina e os diques. 3 Em função dessas dificuldades, e principalmente devido à redução dos recursos humanos especializados no quadro da empresa, a CHESF optou por automatizar todos os piezômetros e medidores de vazão dos diques, com os seguintes objetivos: • Obter maior precisão nas leituras dos instrumentos; • Poder variar a periodicidade das leituras sem prejudicar as outras atividades de manutenção da equipe civil; • Superar a dificuldade de capacitação de pessoal contratado (terceirizados), devido à rotatividade e sensibilidade na execução das leituras. • Aumento na velocidade de tomada de decisões. • Baixar o custo do processo de leitura. • Suprir a escassez de recursos humanos especializados; 3 – SISTEMA DE AUTOMAÇÃO O sistema de automação pode ser dividido nas seguintes partes principais: • Sensores • Redes de comunicação; • Unidades Terminais Remotas (UTR); • Rádio modem; • Unidade Central de Monitoramento (UCM) • Unidade Remota de Monitoramento (URM) 3.1 - SENSORES O sistema consta com dois tipos de sensores. O Sensor de Nível para piezômetros de tubo aberto e Sensores de Nível para vertedouros triangulares de vazão. 4 3.1.1 – Sensores de nível para piezômetros de tubo aberto. O sensor modelo TSMM, visto na Figura 2, é um transmissor de nível hidrostático microprocessado composto de: • Sensor piezoresistivo cuja função é converter valores de coluna de líquido em sinal analógico. • Conversor A/D cuja função é transformar o sinal analógico em digital. • Microprocessador cuja função é executar o programa de operação (aquisição, identificação, calibração etc), armazenar dados em memória não volátil e controlar a comunicação com outros componentes de rede. O sensor possui as seguintes características técnicas: • Faixa de Operação .................................... 0 a 28 mca • Comunicação serial RS 485 • Alimentação................................... • Classe de precisão .................................. +/- 0,10 % FE • Sobrepressão admissível .......................... 3 bar • Material em contado com o fluido ............. AISI 316 • Temperatura de Operação ....................... 0 oC a + 70 oC • Cabo de ligação elétrica em PUR com tubo de compensação para Pressão Atmosférica. • Grau de proteção ...................................... IP68 • Proteção contra inversão de polaridade • Proteção contra sobretensão • Proteção contra surtos(descargas atmosféricas) de acordo com EM 61000-4-5. • Comprimento do cabo .............................. 30metros (variável) protocolo MODBUS .........24 Vcc (mín 9,máx 33 Vcc) Os fatores que levaram a escolha desse tipo de sensor foram: • Precisão das leituras; • Proteção contra descargas elétricas; 5 • Facilidade de instalação; • Comunicação Digital RS 485 protocolo Modbus; • Transferência de dados com alta imunidade a ruídos; • Parametrização remota • Calibração por software, linearizada por segmentos; • Identificação por TAG programável; • Auto diagnóstico remoto. FIGURA 2 – Sensor Piezoresistivo – Vista superior da instalação no piezômetro de tubo aberto 3.1.2 – Sensores de nível para vertedouros triangulares de vazão. O sensor modelo TSM, visto na Figura 3, é um transmissor de nível hidrostático microprocessado composto de forma análoga ao modelo TSMM e escolhido pelos mesmos fatores já descritos no item 3.1.1. O sensor TSM possui as seguintes características técnicas: • Faixa de Operação .......................................0,00 a 1,00 mca • Comunicação serial RS 485 com protocolo MODBUS. • Alimentação .................................................24 Vcc (mínimo 9Vcc, máximo 33 Vcc) • Classe de Precisão ......................................+/- 0,1 % FE 6 • Material em contado com o fluido ................AISI 316 • Fluido .......................................................... Água com sólido em suspensão • Grau de Proteção ....................................... IP68 • Cabo de ligação elétrica em PUR com tubo de compensação para Pressão Atmosférica: • Proteção contra inversão de polaridade • Proteção contra sobretensão • Proteção contra surtos(descargas atmosféricas) de acordo com EM 61000-4-5. • Comprimento do cabo ................................. 25metros. FIGURA 3 – Sensor Piezoresistivo para medição de nível hidrostático dos medidores de vazão triangular 3.2 – REDES DE COMUNICAÇÃO O sistema foi projetado utilizando redes de comunicação para transferência dos dados, com alto grau de segurança, baseadas em protocolos de comunicação consagrados, objetivando à aquisição de dados com alta confiabilidade. Outro critério considerado no projeto do sistema, foi redução do custo de instalação, com materiais e mão de obra. O Sistema possui três redes de comunicação: • Entre os Sensores e Unidades Terminais Remotas (UTR) • Entre as UTR e a Unidade Central de Monitoramento (UCM). 7 • Entre a UCM e as Unidades Remotas de Monitoramento (URM) 3.2.1 - Rede entre Sensores e UTR Para esta rede foi escolhido o padrão elétrico RS 485 utilizando como protocolo o Modbus. Os motivos para esta escolha foram: • Protocolo Aberto. • Fácil obtenção de Sensores com esta padronização. • Rede determinística. • Fácil Instalação e Manutenção. • Fácil obtenção de ferramentas e softwares. • Alta segurança na transferência de dados utilizando CRC-16 Check. • Comunicação Mestre / Escravo para gestão centralizada das medições. • Velocidade de Comunicação adequada a freqüência das leituras. Figura 4 abaixo mostra o diagrama da rede do Dique “A”, evidenciando o baixo custo de instalação em contraposição a utilização de sensores com sinal analógico onde teríamos um cabo saindo da UTR para cada sensor. A distribuição da alimentação 24 Vcc seguiu o critério de distribuição da rede. A Figura 5 mostra o diagrama de ligação entre os sensores e as UTR do Dique “B”. 8 FIGURA 4 – Arquitetura esquemática de ligação entre os sensores e a UTR do Dique “A”. FIGURA 5 – Arquitetura esquemática de ligação entre os sensores e a UTR do Dique “B”. 3.2.2 - Comunicação entre as UTR e UCM A longa distância de 13 Km entre a UCM,situada no prédio da UHE Sobradinho, e os Diques “A” e “B”, inviabilizou a utilização de um meio físico 9 (cabo, fibra ótica e etc) para transferência dos dados. Como solução, foi escolhido um sistema sem fio de radio-enlace devido aos seguintes fatores: • Topografia permitia utilização de freqüências livres. • Desoneração de taxas e alugueis. • Baixo custo de instalação. • Segurança na transmissão de dados (protocolos transparentes e com CRC) • Velocidade de Comunicação. • Facilidade de Operação e Manutenção (ferramentas de auto-diagnóstico). O radio-enlace foi obtido pela ligação de três radio-modens. Sendo um em cada UTR dos Diques “A” e ”B” e um na UCM. Formando uma rede onde cada um possui um endereço. Essa condição possibilita expansão futura adicionando novos rádios-modem. 3.2.3 – Comunicação entre a UCM e URM A comunicação entre a Unidade de Central de Monitoramento, que fica localizada na Usina de Sobradinho e a Unidade Remota de Monitoramento, situada em Recife-PE, na sede da CHESF, distante cerca de 800 Km, é feita utilizando-se a rede interna da Chesf. Como medida de segurança, essa comunicação também pode ser feita através de modem utilizando o software PC Anywhere provido de firewall específico. As Figuras 6 e 7, mostram o local de instalação das UTR, o poste com a antena de transmissão, a UTR e o painel do radio modem da UCM: FIGURA 6 – Abrigo para as UTR, no dique “A” FIGURA 7 – Painel do rádio modem da UCM na Usina de Sobradinho 10 3.3 – UNIDADES TERMINAIS REMOTAS (UTR) Para aquisição de sinais dos sensores de nível piezométrico e de vazões, foram instadas duas UTR, Figura 8, uma em cada dique, possuindo comunicação RS 485 Protocolo Modbus, indicação local, armazenamento de dados, monitoração e transmissão à distância dos dados através de rádio enlace. Cada UTR possui os seguintes componentes; • Um painel para acomodação do sistema. • Um Módulo CPU. • Um Módulo Conversor de tensão (220 Vca/24 Vcc). • Uma interface Homem/Máquina. • Protetores contra Descargas Atmosféricas para Alimentação e RS485. • Um módulo de comunicação. FIGURA 8 – Painel da UTR 3.4 – RÁDIO MODEM A faixa de freqüência foi escolhida de modo a satisfazer a resolução no 209 da Anatel, de 14/01/2000, naqueles itens referentes a equipamentos com tecnologia de espalhamento espectral e o projeto considerando os dados dos locais de instalação e respeitando os limites de potencia de pico máxima de saída do transmissor conforme previsto no Art. 43 da resolução supracitada. As principais características do Rádio Modem são: • Tecnologia do Equipamento .......... Espalhamento Espectral • Tensão de Operação ..................... 24 Vcc 11 • Faixa de Freqüência ...................... 902 – 928 MHz • Modo • Método de Modulação ................... GFSK • Número de Canais de Varredura ... 50 • Seqüência de Varredura • Taxa de Transmissão Serial .......... 300 bps até 115.2 kbps • Formato dos Dados: ...................... 8/9 bits, 1 stpo bit • Modo de Operação ............. ..... ...Ponto a Ponto, Ponto a Multiponto • Taxa de Transmissão por Canal.... 166.6 kbps Varredura de Frequências(FHSS) 30 3.4.1 -Transmissor • Potencia de saída – nível 1 ................................ 970 mW nível 2 ..................................50 mW • Estabilidade de Freqüência do Transmissor . ... ± 15 kHz 3.4.2 – Receptor • Tipo do Receptor.................. ....Supereterodino c/dupla conversão • Sensibilidade de Recepção....... < -102 dBm @ 10-6 BER • Faixa Dinâmica Alta Sensibilidade ..................... 0 a –102 dBm (atuador desabilitado) Baixa Sensibilidade ................ +20 a –72 dBm (atenuador habilitado) • Estabilidade de Freqüência LO ± 15 kHz 3.4.3 - Antena • Tipo ................................... .......... Direcional Yagi • Ganho ........... ............................. 11dB • Impedância .............. ................... 50 Ohms • Coaxial .......................... ............. RG213 com centelhador e conectores 12 A Figura 9 mostra a montagem da antena em poste provido de sistema de para-raio, cabo de descida com isoladores cerâmicos, hastes terra para mínimo de 6 Ohms. 3,0m 30º Vista superior Poste 0,17 m 1,5m 0,8m Para-raio Antena UCM 1,2m 2,4m Instalação de para-raio e antena nas UTRs 2,0m Caixas 0,30 x 0,40 m 0,35 m FIGURA 9 – Instalação da antena e para-raio 3.5 – UNIDADE CENTRAL DE MONITORAMENTO (UCM) O micro computador denominado UCM, está instalado na sala da equipe civil na Usina de Sobradinho-BA, e tem as seguintes funções: • Aquisição e tratamento de dados enviados pelos sensores de forma permanente com configuração da taxa de aquisição • Armazenamento dos dados recebidos • Processamento do software de supervisão e controle em tempo real • Realizar as funções de controle e intertravamento para os parâmetros com aquisição direta • Tratamento estatístico dos dados 13 • Sinalização de ocorrências ligadas aos parâmetros • Reconhecimento de ocorrências • Back-up dos dados • Gerenciamento e sequênciamento de eventos • Emissão de relatórios históricos • Emissão de gráficos de tendências • Acompanhamento operacional dos subsistemas • Supervisão geral do sistema (medição) • Supervisão do estado (STATUS) dos equipamentos • Disponibilização dos dados das medições para uma outra unidade de monitoramento, denominado URM (Unidade Remota de Monitoramento) instalado na DOCG (Divisão de Manutenção Civil das Instalações) na sede da CHESF em Recife-PE. A comunicação entre os micros computadores denominados UCM e URM é feita conforme descrito no item 3.2.3. 3.6 – SOFTWARE DE SUPERVISÃO O programa monitora as subpressões dos 62 piezômetros e as medições dos 7 medidores de vazões dos diques “A” e “B”. Em caso de alguma anormalidade detectada, um aviso alerta é exibido nas telas. O software permite edição dos parâmetros de alarme e visualização das ocorrências já registradas, além de traçar gráficos do deslocamento de cada ponto em observação entre duas datas desejadas. 3.6.1 – Tela Principal A tela principal é mostrada na Figura 10. O menu de opções é observado na parte inferior da tela. A partir desse menu, o usuário tem acesso a todas as outras telas do software. As opções são: Visualização das leituras dos Diques A e B, Histórico das leituras, Gráfico, Alarmes, Eventos e Parâmetros. Na parte superior são exibidas a data e hora do sistema. Na lateral direita superior um botão “EXECUTAR” permite obter uma leitura instantânea de todos os piezômetros e vazões. 14 Sempre que um alarme disparar, na tela principal o botão de acesso a Alarmes ficará com fundo intermitente vermelho e as demais telas com uma mensagem de alarme na parte superior. FIGURA 10 – Tela principal 3.6.2 – Tela Histórico A tela histórico, Figura 11, permite a visualização de todos os valores dos piezômetros e medidores de vazão registrados desde o início de operação do sistema. Para melhor visualização é possível realizar uma seleção ou filtro que pode ser feito por período inserindo uma data inicial e final. Para efetivar um filtro aos selecionar as opções clicar no botão Filtrar. Para armazenar as informações em arquivo formato texto clicar no botão Gravar. 15 FIGURA 11 – Tela Histórica 3.6.3 – Telas esquemáticas As telas esquemáticas permitem a visualização de todos os valores piezométricos e medidores de vazão, bem como a localização física dos sensores nos diques. A Figura 12 mostra o esquema do Dique “A”. FIGURA 12 – Tela esquemática Dique “A” 16 3.6.4 – Níveis de acesso do software São três os níveis de acesso: Nível 0 à Supervisão Tem todas as permissões possíveis: Reconhecer Alarmes Modificar Parâmetros Senha é única e indelével Adicionar / Excluir / Modificar Senhas Nível 1 à Manutenção Nível intermediário. As permissões são: Reconhecer Alarmes Modificar Parâmetros Múltiplos usuários Nível 2 à Operação Permissão restrita a Reconhecimento de Alarmes Múltiplos usuários 4 – CONCLUSÃO A automação dos piezômetros e medidores de vazão dos Diques “A” e “B”, melhorou os seguintes aspectos: • Aumento da Confiabilidade nos dados obtidos; • Diminuição do tempo de obtenção das leituras; • Diminuição de erros decorrentes de digitação das leituras; • Facilidade de mudança na periodicidade das leituras; • Informação imediata sobre falha dos instrumentos; • Facilidade no tratamento e análise dos dados. 17 5 – REFERÊNCIAS BIBLIOGRAFICAS 1. SOUZA, Ricardo Barbosa, MAIA, Roberto Abraão. Tratamento de subpressões elevadas no Dique “A”- UHE Sobradinho, XXIII SNGB, Belo Horizonte, 1999 2. SOUZA, Ricardo Barbosa, MAIA, Roberto Abraão, VASCONCELOS, Aurélio Alves. UHE Sobradinho - Dique B Utilização de gabiões e geotextil em trincheira de drenagem complementar, XXIV SNGB, Fortaleza, 2001 3. CHESF. ROCB (Relatório de Observação e Controle de Barragens) DOCG 2002 4. HYTRONIC. Manual de Operação do Sistema de Automação, Sobradinho 2003. 18
Baixar