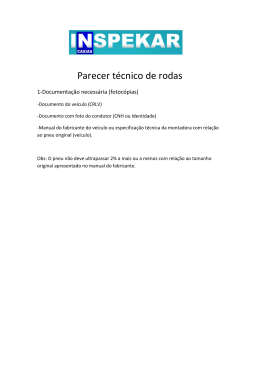
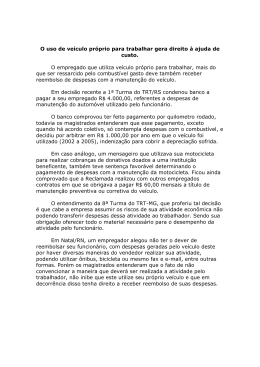
Engenharia de Controle e Automação DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação de um projeto que teve inicio em uma turma de Introdução a Engenharia e que já foi desenvolvido como projeto de iniciação cientifica por outros alunos. A atual versão do projeto apresenta inovação no sistema de aquisição de dados e no sistema de controle. Objetivos Estudo e desenvolvimento de modelos matemáticos que representem a dinâmica de veículos de fenda em escala (autorama). Determinação de parâmetros físicos para o modelo matemático do sistema. Implementação de um sistema de aquisição de dados e controle de tensão em pistas de autorama para comparação de dados obtidos experimentalmente e a partir do modelo matemático. Detalhamento do Projeto i) Modelagem do sistema Um modelo referente a dinâmica longitudinal de veículos de autorama foi desenvolvido a partir das seguintes hipóteses. Veículo plano e simétrico com relação ao plano lateral; veículo representado por uma massa concentrada no CM; contato pneus-solo sem deslizamento (patinação das rodas); veículo em terreno plano (sem aclives ou declives – ladeiras); engrenagens (pinhão-coroa) sem atrito, sem deslizamento, e sem massa; elementos girantes (rotor de motor, eixos, engrenagens, roda-pneus) com momento de inércia desprezível em relação a massa do veículo; força de resistência aerodinâmica desprezível. Dessa forma, foi extraído um sistema de equações diferenciais de primeira ordem não homogêneo que possui como variáveis de saída 𝑣𝑥 e X que representam a velocidade longitudinal e o deslocamento do veículo e como variável de entrada o comando 𝛿, variável entre 0 e 1 que representa o comando dado ao motor. Engenharia de Controle e Automação N V0 v x kV rm X vx 2 N v k 2 x r m Nesse modelo, N representa a relação de transmissão do par pinhão-coroa, r representa o raio das rodas traseiras, m representa a massa do veículo, V0 representa a tensão de alimentação do sistema e 𝛽 é um parâmetro que representa as perdas do sistema de transmissão Os parâmetros 𝑘𝑣 e 𝑘𝜔 são parâmetros referentes ao modelo de um motor elétrico de corrente continua. Para sua determinação, um motor de um veículo comercial foi submetido a testes em um dinamômetro de bancada (Figura 1). Figura 1 - Motor no dinamômetro de bancada Os dados de velocidade angular do motor, junto dos parâmetros determinados são mostrados na Figura 2. Velocidade x Tempo 1400 Velocidade (rad/s) 1200 1000 800 600 400 KV : 8.9e-04 N.m/V KW : 8.1e-06 N.m.s 200 KI : 5.6e-02 A/V 0 Res : 6.7e+00 V/A 0 2 4 6 8 10 Tempo (s) Figura 2 - Dados referente ao teste de bancada 12 14 Engenharia de Controle e Automação ii) Veículo Experimental Para validar os dados extraídos do modelo foi desenvolvido um sistema de aquisição de dados para extrair dados referentes a dinâmica de um veículo de autorama. O sistema consiste de um microcontrolador Arduino associado a diferentes componentes eletrônicos com o objetivo de aquisitar dados dinâmicos em condições reais. Para a aquisição dos dados de aceleração lateral e longitudinal e da variação do ângulo de guinada foi utilizado uma central inercial de 6 graus de liberdade compostas por um acelerômetro e um girômetro. Para aquisição da velocidade, um sensor de reflexão instalado na parte inferior do chassi e ao longo das pistas foram colocadas fitas refletivas de mesmo comprimento espaçadas igualmente. Dessa forma, é possível saber a velocidade do veículo a partir do intervalo de tempo que o veículo passou por cada fita. Todos os dados são armazenados em um cartão SD embarcado no veículo além de serem transmitidos através de uma conexão bluetooth. Além do sistema de aquisição de dados, a eletrônica embarcada possui um sistema de controle para o motor do veículo, que permite alterar a tensão fornecida ao motor sem o uso dos controles tradicionais de autorama. O comando dado ao motor é recebido a partir da conexão bluetooth. Para embarcar os componentes eletrônicos em um autorama foi desenvolvido um veículo experimental partir de um chassi comercial modificado com um suporte em MDF para a eletrônica, como mostrado na figura 3. Além da eletrônica, foi adicionada uma câmera com transmissão em tempo real das imagens. Figura 3 - Primeira versão do veículo experimental Apesar do resultado satisfatório, o suporte em MDF junto de todos os componentes eletrônicos aumentou significativamente o peso do veículo, fazendo com que o mesmo não representasse fielmente modelos de veículos de autorama. Para reduzir o peso do veículo, foi projetado um chassi baseado em veículos comerciais e sua construção foi feita em plástico ABS a partir de uma impressora 3D. Por adicionar peso excessivo, a segunda versão do veículo não contou com a câmera embarcada. Engenharia de Controle e Automação Figura 4 - Segunda versão do veículo experimental O motor utilizado é o mesmo de um veículo de autorama comercial, assim como as rodas e o sistema de transmissão. O veículo com a eletrônica embarcada teve acréscimo de aproximadamente 15% em peso comparado com um comercial e além disso, a distribuição de massa entre as rodas dianteiras e traseiras ficou semelhante à de um veículo comercial, não alterando as características básicas do mesmo. iii) Interface com o Computador O bluetooth presente na eletrônica embarcada do veículo permite uma conexão serial com outros dispositivos bluetooth. Dessa forma, utilizando um computador com conexão bluetooth é possível desenvolver um programa para leitura dos dados provenientes do sistema embarcado. Foi utilizado o software LabView que permite fácil leitura de dados, além de fornecer boa interface gráfica. Além de simplesmente exibir os dados, o software aplica um filtro para reduzir os ruídos nos dados de aceleração e taxa de guinada. A interface é mostrada na figura 5. Figura 5 - Interface gráfica Engenharia de Controle e Automação Conclusão Até o presente momento foi realizada a construção do veículo e estão em andamento os testes dinâmicos referentes a dinâmica longitudinal de veículos de autorama. Está em desenvolvimento um modelo que representa a dinâmica lateral do veículo, além da criação de uma segunda versão da eletrônica embarcada que possua uma câmera embarcada e que possua menor peso. Referências 1 - SCHLEICHER, R. Slot Car Racing in the Digital Age. 1.ed. Minneapolis, EUA: Voyageur Press, 2008. 240p. 2 - CHANG, D. Digital Slot Car Racing in 1/32 scale. 1.ed. Marlborough: The Crowood Press, 2011. 200p.
Download