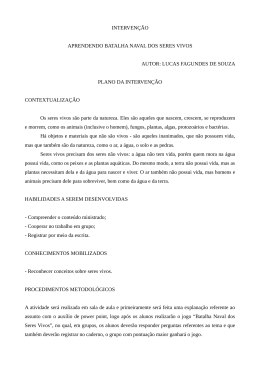
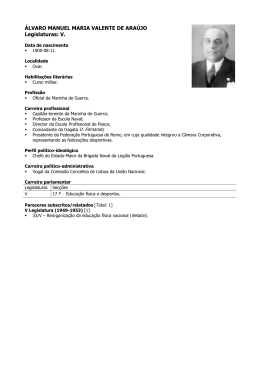
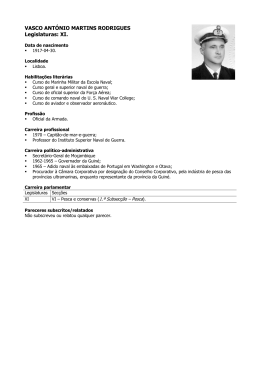
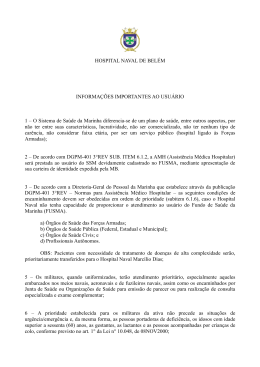
SECRETARIA DE CIÊNCIA, TECNOLOGIA E INOVAÇÃO DA MARINHA Revista Pesquisa Naval Números 23 e 24 – nov. 2010/2011 Brasília 2010/2011 ISSN 1414-8595 REVISTA PESQUISA NAVAL PATROCÍNIO SECRETARIA DE CIÊNCIA, TECNOLOGIA E INOVAÇÃO DA MARINHA – SecCTM EDITOR-CHEFE V Alte ILQUES BARBOSA JUNIOR Secretário de Ciência, Tecnologia e Inovação da Marinha EDITORES ADJUNTOS C Alte (EN) MAURILLO EUCLIDES FERREIRA DA SILVA Diretor do Instituto de Pesquisas da Marinha – IPqM C Alte ANTONIO REGINALDO PONTES LIMA JUNIOR Diretor do Centro de Análises de Sistemas Navais – CASNAV C Alte RENATO RODRIGUES DE AGUIAR FREIRE Diretor do Instituto de Estudos do Mar Almirante Paulo Moreira – IEAPM CONSELHO EDITORIAL CMG (EN) EMILSON GONÇALVES PAULO CF CLÉDERSON BUCCI FERNANDES 2º SG-ED SUED DE SOUZA LIMA EVANGELISTA EDIÇÃO SECRETARIA DE CIÊNCIA, TECNOLOGIA E INOVAÇÃO DA MARINHA – SecCTM REVISÃO ORTOGRÁFICA E NORMALIZAÇÃO DE REFERÊNCIAS Profª VALÉRIA F. DE NEGRI – FGV/RJ Profª Mª ALICE COELHO – SME/RJ COMISSÃO EDITORIAL Dr. Adilson Gonzaga – USP – São Carlos/SP/Brasil Dr. Alexandre Ricardo Soares Romariz – UnB – Brasília/DF/Brasil Dra. Ana Maria Carmona Ribeiro – USP – São Paulo/SP/Brasil Dr. Carlos Ventura D’Alkaine – UFSCar – São Carlos/SP/Brasil Dr. Charles Casimiro Cavalcante – UFC – Fortaleza/CE/Brasil Dr. Eder João Lenardão – UFPel – Pelotas/RS/Brasil Dr. Eduardo Juan Soriano-Sierra – UFSC – Florianópolis/SC/Brasil Dr. Eduardo Marone – UFPR – Pontal do Paraná/PR/Brasil Dr. Ettore Apolonio de Barros – USP – São Paulo/SP/Brasil Dr. Fernando Augusto Silva Marins – UNESP – Guaratinguetá/SP/Brasil Dr. Flávio Soares Corrêa da Silva – USP – São Paulo/SP/Brasil Dr. Geovany Araújo Borges – UnB – Brasília/DF/Brasil Dr. João Luiz Becker – UFRGS – Porto Alegre/RS/Brasil Dr. Laércio Martins de Mendonça – UFRN – Natal/RN/Brasil Dr. Li Weigang – UnB – Brasília/DF/Brasil Dr. Lucio Guido Tapia Carpio – UFRJ – Rio de Janeiro/RJ/Brasil Dr. Luís da Cunha Lamb – UFRGS – Porto Alegre/RS/Brasil Dr. Marco Túlio Carvalho de Andrade – USP – São Paulo/SP/Brasil Dr. Marcos Antônio Pinto Martins – UFSM – Santa Maria/RS/Brasil Dr. Mauro Cirano – UFBA – Salvador/BA/Brasil Dr. Miguel Afonso Sellitto – Unisinos – São Leopoldo/RS/Brasil Dr. Moisés Vidal Ribeiro – UFJF – Juiz de Fora/MG/ Brasil Dr. Orlando Fontes Lima Júnior – UNICAMP – Campinas/SP/ Brasil Dr. Rafael Timóteo de Sousa Júnior – UnB – Brasília/DF/Brasil Dra. Silmara das Neves – USF – Itatiba/SP/ Brasil CAPA A capa apresenta uma representação da “Amazônia Azul” e a sobreposição de foto dos dois Laboratórios Nacionais Embarcados da Marinha do Brasil, atualmente em atividade: O Aviso de Pesquisa “Aspirante Moura” e o Navio Hidroceanográfico “Cruzeiro do Sul”. A Revista Pesquisa Naval tem como missão proporcionar à comunidade científica um canal formal de comunicação e de disseminação da produção técnico-científica nacional, por meio da publicação de artigos originais que sejam resultados de pesquisas científicas e que contribuam para o avanço do conhecimento nas áreas de interesse da MB. Os artigos aqui publicados não refletem a posição ou a doutrina da Marinha e são da responsabilidade dos seus autores. Revista Pesquisa Naval / Secretaria de Ciência, Tecnologia e Inovação da Marinha v. 1, n. 1, 1988 – Brasília – DF – Brasil – Marinha do Brasil Anual Título Abreviado: Pesq. Nav. ISSN 1414-8595 1. Marinha – Periódico – Pesquisa Científica. Secretaria de Ciência, Tecnologia e Inovação da Marinha. CDU 001.891.623/.9 CDD 623.807.2 Revista Pesquisa Naval SUMÁRIO Apresentação Vice-Almirante ILQUES BARBOSA JUNIOR Secretário de Ciência, Tecnologia e Inovação da Marinha...............................................................................................................7 NÚMERO 23 Cibernética (Tecnologia da Informação) e Comunicações Desempenho de um Sistema de Telecomunicações OFDM com Estimativas de Segunda Ordem baseadas em Casamento de Correlação de Dados Deolinda Fontes Cardoso, Fabian David Backx, Raimundo Sampaio Neto.............................................................9 Processos Decisórios A Contribuição das Cartas Vetoriais para a Construção da Consciência Situacional Capitão-de-Fragata Cleber Almeida de Oliveira, Capitão-de-Mar-e-Guerra Marcus Vinícius da Silva Roberto, Capitão-de-Corveta (EN) Rodrigo Alves Natalizi, Capitão-Tenente (T) André Kouzmine................................. 16 Avaliação dos Portos Brasileiros por meio do Índice de Malmquist Capitão-de-Corveta Renato Leite Fernandes................................................................................................................ 26 Sensores, Guerra Eletrônica e Guerra Acústica Desenvolvimento de um Sistema de Patrulhamento Tático Multi-Operacional Utilizando Veículos Aéreos Não-Tripulados Rodrigo Kuntz Rangel, Capitão-de-Fragata Cleber Almeida de Oliveira, Karl Heinz Kienitz, Brigadeiro Mauricio Pazini Brandão..............................................................................................................................34 NÚMERO 24 Materiais Especiais Síntese e Avaliação da Ação Algicida de Lyso-glicerofosfocolinas Capitão-de-Corveta (EN) William Romão Batista, Vanessa de Almeida Martins, Maria Helena Campos Baeta Neves, Ricardo Coutinho, Rosangela Sabbatini Capella Lopes, Cláudio Cerqueira Lopes..................................................................................................................................................44 Sulfonação da Base de Esmeraldina para Utilização como Membranas Trocadoras de Prótons para Células a Etanol Ana Paula Santiago De Falco, Magali Silveira Pinho, Luis Cláudio Mendes, Roberto da Costa Lima, Wido H. Schreiner............................................................................................................................................................54 Processos Decisórios Sistema baseado em Inteligência Artificial para Agrupamento e Classificação de Dados na Construção Naval Karen Barañano Souza, Silvia da Costa Botelho......................................................................................................... 60 Sensores, Guerra Eletrônica e Guerra Acústica Redução de Seção Reta Radar com Emprego de Metamateriais Capitão-de-Corveta Márcio Martins da Silva Costa, Capitão Aviador Luis Felipe de Moura Nohra, Tenente Coronel José Everardo J. Ferreira.........................................................................................................................68 Contribuição Especial Inteligência Artificial na Marinha: um Caminho a ser trilhado Capitão-de-Fragata Dilson Godoi Espenchitt.....................................................................................................................75 Apresentação A Revista Pesquisa Naval apresenta à comunidade científica mais uma coletânea de estudos desenvolvidos por pesquisadores das áreas de interesse do Sistema de Ciência, Tecnologia e Inovação da Marinha – SCTMB. A Marinha do Brasil, para o contínuo fortalecimento do SCTMB, vem estabelecendo parcerias estratégicas com centros de excelência acadêmica e científica, proporcionando, assim, a melhoria da qualidade das pesquisas navais, tanto no intercâmbio de conhecimentos entre os pesquisadores, quanto por meio do aprimoramento da infraestrutura de apoio às pesquisas científicas. O esforço para o aprimoramento pode ser constatado com as aquisições dos denominados Laboratórios Nacionais Embarcados (LNE): o Navio Hidroceanográfico “Cruzeiro do Sul” e o Aviso de Pesquisa “Aspirante Moura”, em parceria com o Ministério de Ciência, Tecnologia e Inovação, Diretoria de Hidrografia e Navegação, Financiadora de Estudos e Projetos – FINEP e Fundação de Desenvolvimento da Pesquisa – FUNDEP. Esses novos LNE, juntamente com o Navio Polar “Almirante Maximiano” contribuem significativamente para ampliar o conhecimento científico e tecnológico, fortalecendo, ainda mais, a soberania nacional nos espaços oceânicos. A Secretaria de Ciência, Tecnologia e Inovação da Marinha congratula os pesquisadores, cujos artigos agregam, à Revista Pesquisa Naval, um elevado valor de conhecimento científico e tecnológico e agradece aos seus colaboradores ad hoc, o trabalho desenvolvido no processo de avaliação dos artigos submetidos para publicação nesta revista. A Revista Pesquisa Naval, visando à divulgação do conhecimento e da produção científica, convida a academia, a comunidade científica, o empresariado e a comunidade naval a usufruírem deste espaço e a interagirem de forma profícua e agradável. Bons ventos, mares tranquilos e boa leitura! ILQUES BARBOSA JUNIOR Vice-Almirante Secretário de Ciência, Tecnologia e Inovação da Marinha 7 Cibernética (Tecnologia da Informação) e Comunicações Desempenho de um Sistema de Telecomunicações OFDM com Estimativas de Segunda Ordem baseadas em Casamento de Correlação de Dados Deolinda Fontes Cardoso Doutora em Engenharia Elétrica pela Pontifícia Universidade Católica do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. Pesquisadora do Centro de Análises de Sistemas Navais – Rio de Janeiro, RJ – Brasil. E-mail: [email protected] Fabian David Backx Doutor em Engenharia Elétrica pela Pontifícia Universidade Católica do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. Pesquisador do Instituto de Pesquisas da Marinha – Rio de Janeiro, RJ – Brasil. E-mail: [email protected] Raimundo Sampaio Neto Doutor em Engenharia Elétrica pela University of Southern California – Los Angeles, CA – Estados Unidos. Professor do Centro de Estudos em Telecomunicações da Pontifícia Universidade Católica do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. E-mail: [email protected] Resumo No presente estudo, técnicas de casamento de correlação de dados são aplicadas para obter estimativas cegas dos parâmetros do canal de propagação multipercurso, em um sistema de transmissão digital OFDM (Orthogonal Frequence Division Multiplexing). O intervalo de guarda considerado é do tipo Zero Padding (ZP). A técnica de casamento de correlação de dados apresentada é usada para identificar a resposta ao impulso do canal nas transmissões no enlace reverso do sistema. Basicamente, nessa técnica a Matriz de Auto Correlação dos dados recebidos é comparada com a Matriz de Auto Correlação estimada por meio de uma média temporal. Após a comparação das duas matrizes de auto correlação, a real e a estimada, é gerada uma Matriz de Erro; por meio da minimização do quadrado da norma de Frobenius dessa matriz de erro os parâmetros do canal podem ser estimados com uma ambiguidade escalar complexa. Simulações, por meio do método Monte Carlo, indicaram que o método proposto, neste estudo, apresenta desempenho comparável aos métodos de identificação de subespaço, porém, com complexidade computacional mais amena. Palavras-chave Simulação Monte Carlo. Técnica de Casamento de Correlação. Problema de Minimização Quadrática. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 9-15 Performance of an OFDM Telecommunications System with estimate based on Data Correlation Matching Abstract In this paper, correlation matching techniques are applied to blindly estimate multipath parameters for a Zero Padded OFDM (Orthogonal Frequence Division Multiplexing) system. A technique is proposed to identify the impulse response of the multipath channel in the uplink transmission. Basically, in this technique the correlation matrix of the received data sequence is compared to its estimate by sample average. After matching of two correlation matrices, the real and the estimate, is derived a Error Matrix; by minimizing the square of the Frobenius norm of the resulting error matrix, the channel parameters can be estimated by a complex scalar ambiguity. Simulations, by means of the Monte Carlo Method, have indicated that the proposed method has a performance comparable to the existing subspace methods, but with a milder computational complexity. Keywords Monte Carlo Simulation. Correlation Matching Techniques. Square Minimization Problem. 1. Introdução O primeiro passo para avaliar o desempenho de um sistema de transmissão de dados por meio de simulação é construir um consistente modelo matemático do problema [6]. Esse modelo é, tipicamente, composto por um conjunto de equações e de expressões numéricas que permitem descrever o comportamento do sistema e, geralmente, são utilizados métodos matemáticos baseados em Estatísticas de Segunda Ordem (Second Order Statistics) do vetor dos sinais recebidos. As estatísticas são usadas para obter as estimativas, 9 Deolinda Fontes Cardoso / Fabian David Backx / Raimundo Sampaio Neto de parâmetros desconhecidos, relevantes para a modelo da simulação. Na literatura especializada, destacam-se os métodos matemáticos baseados em: identificação de subespaço [5], em otimização com restrições [4;7]: como a de mínima variância [2;8] ou a de módulo constante [3] e casamento de correlação de dados recebidos [1;9]. Neste estudo, aplicamos a técnica de casamento de correlação (Correlation Matching), um caso especial do método de momentos (Moment Method), para obter estimativas cegas da resposta ao impulso do canal de transmissão. Tais estimativas são fundamentais no algoritmo de estimação do canal, parte integrante do modelo, para a avaliação do desempenho de sistemas de comunicações digitais. O método de estimação cega, baseado em casamento de correlação de dados, foi escolhido por permitir obter estimativas despolarizadas com convergência assintótica ótima e com menor magnitude computacional, quando comparado aos tradicionais métodos de estimação cegos por identificação de subespaço do ruído. Assim, é investigado e confrontado o desempenho de um sistema padrão de transmissão de dados OFDM utilizando estimativas obtidas pelos métodos de casamento de correlação e de identificação de subespaço. No procedimento analítico, a matriz correlação dos dados recebidos, parametrizada pelo vetor desconhecido dos coeficientes do canal de transmissão, é comparada com a sua estimativa, obtida por amostragem média. A função custo a minimizar é definida como o quadrado da norma de Frobenius da matriz Erro resultante dessa comparação. Empregando um conjunto de poderosos operadores matemáticos como: o produto de Kronecker, gradiente complexo e o vetor de empilhamento de colunas de matrizes, é possível 10 desenvolver a modelagem matemática vetorial para a construção do modelo analítico dos sinais. O modelo analítico é necessário e primordial para a construção do modelo de simulação do sistema. O método de simulação escolhido foi o de Monte Carlo por apresentar uma estrutura simples e bastante flexível e, ainda, por permitir obter as distribuições mais prováveis neste problema de complexidade exponencial. Todavia, um elevado número de simulações é necessário para reduzir o erro da estimativa da solução procurada. Os resultados de desempenho simulado do Erro Médio Quadrático (Mean Square Error) e da Taxa de Erro de Bit - BER (Bit Error Rate) mostraram que o método de casamento de correlação permitiu obter estimativas de qualidade e ressaltou a importância do uso da simulação como uma ferramenta de auxílio na avaliação do desempenho de um complexo sistema de comunicações. Este artigo, que apresenta ao leitor o estudo realizado sobre o desempenho de um sistema de telecomunicações OFDM com estimativas de segunda ordem baseadas em casamento de correlação de dados, está organizado da seguinte forma: a Seção 2 descreve a Modelagem Matemática do Sistema onde estão apresentadas as análises para minimização da função custo. A Seção 3 apresenta as simulações realizadas e na Seção 4, encontram-se as conclusões chegadas com este estudo. Notação adotada: caracteres maiúsculos em negrito denotam matrizes; caracteres minúsculos em negrito denotam vetores. Os operadores (.)T, (.)H indicam transposto de um vetor e hermitiano (transposto conjugado) de um vetor; o operador representa o produto de Kronecker. O operador vetor vec{.} é obtido pelo empilhamento de cada coluna de uma matriz sobre outra coluna, resultando em um vetor longo composto por todas as colunas da matriz; ||A||F representa a norma de Frobenius da matriz A, definida como [vecH(A)vec(A)] ½. O operador E [.] representa o valor esperado. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 9-15 Cibernética (Tecnologia da Informação) e Comunicações 2. A modelagem matemática do sistema Neste estudo, consideramos o equivalente a tempo discreto de um sistema OFDM de transmissão de blocos por meio de M subportadoras ortogonais. Os símbolos de dados transmitidos são descorrelacionados, com energia unitária e oriundos de constelações BPSK (Binary Phase Shif Keying). No transmissor a cada bloco de M símbolos é aplicada uma operação de Transformada Inversa Discreta de Fourier de M pontos e, a seguir, um intervalo de guarda do tipo ZP (Zero Padding) composto por G símbolos [5] é adicionado ao final de cada bloco para garantir a ausência da sobreposição de blocos na recepção. O bloco OFDM resultante, de dimensão P=M+G (onde G é o comprimento do intervalo de guarda) é transmitido por meio de um canal com múltiplos percursos, cujo equivalente discreto é modelado por uma matriz de convolução Toeplitz triangular inferior Hc de dimensões P x P na qual a primeira coluna é a resposta ao impulso do equivalente discreto h do canal estendida com zeros; supondo-se que esse vetor tem comprimento L (L coeficientes), o comprimento do intervalo de guarda G deve ser no mínimo igual a (L - 1). Considerando-se o equivalente discreto do sistema, descrito acima, tem-se que o modelo vetorial do sinal recebido correspondente ao i-ésimo bloco OFDM transmitido é dado pela seguinte expressão: r (i) = H FH b(i) + n (i) (1) onde a matriz H é uma matriz Toeplitz, de dimensões P x M formada pelas primeiras M colunas da matriz Hc; a matriz FH de dimensões M x M implementa a Transformada Inversa Discreta de Fourier realizada na transmissão e satisfaz a condição F FH = FH F = IM; sendo IM a matriz identidade de dimensões M x M; o vetor b(i) representa o bloco de M símbolos de dados transmitido e o vetor de ruído Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 9-15 n(i), originado pelo ruído branco gaussiano presente na entrada do receptor, é um vetor gaussiano de média nula e matriz covariância Cov= E[ n(i) nH (i) ] = s2IP. A partir do vetor do sinal recebido (1) calcula-se a sua matriz correlação, de dimensões P x P. Rr = E [r (i) rH (i) ] = H F E [b (i) bH (i) ] FH HH + E [n(i) nH(i)] = H HH + s2 IP = H H H + s2 I P (2) onde foi utilizado E [b(i)b(i)H] = IM (símbolos descorrelacionados com energia unitária) e o parâmetro s2 representa a potência do ruído. As colunas da matriz Toeplitz do canal H podem ser expressas como o produto entre M matrizes esparsas Sm (m = 1...M) de dimensões P x L e o vetor h dos coeficientes do canal de dimensão L x 1: H = [ S1 h | S 2 h | . . . | S M h ] (3) onde a matriz S1 = [ IL 0P-L ] é formada pela matriz identidade de dimensões L x L e por uma matriz 0P-L com (P-L) linhas de zeros e as outras matrizes Sm são formadas deslocando-se a matriz identidade de uma linha abaixo: Si = [ 0(i-1) IL 0(P-L-i) ] Substituindo (3) na expressão (2) temos: Rr = Σm=1M Sm hhH SmT + s2IP = Σm= 1M Sm A SmT + s2IP (4) Assim, a expressão da matriz correlação, Rr (h, s2), é função de L+1 parâmetros: os L coeficientes do canal h; e a potência do ruído s2. A matriz A = hhH é uma matriz de posto unitário, com dimensões L x L. 11 Deolinda Fontes Cardoso / Fabian David Backx / Raimundo Sampaio Neto Neste estudo, a estimativa da matriz correlação, no i-ésimo intervalo de transmissão, é obtida como uma média temporal ao longo dos blocos de símbolos transmitidos: J (i) = [Dx + s2 j - q (i)]H [Dx + s2 j - q (i)] = xHDH Dx + j H s2 Dx + j H s4 j + xHDH j s2 + q (i)H q (i) - q (i)H Dx - q (i)H j s2 - xHDH q (i) - j s2 q (i) (12) Rre (i)= 1 / i Σij=1 r (j) rH (j) A função custo J(i) é real e quadrática nas variáveis complexas (x, s2) e uma estimativa da variável (vetor) x, para posterior obtenção do vetor h desejado, pode ser obtida por meio da minimização dessa função. (5) Definindo a matriz Erro E(i), de dimensões P x P, como o erro resultante da comparação da matriz correlação, dada na equação (4), com a sua estimativa, dada em (5), temos: E(i) = Rr - Rre (i) (6) A função custo considerada é definida como o quadrado da norma de Frobenius da matriz de erro E(i), para cada bloco de símbolo de dados transmitido, assim: J (i) = || E(i) ||F 2 = vecH [ E(i)] vec [ E(i)] (7) Aplicando o operador vec (.) na matriz de erro (6), temos: vec (E(i)) = vec (Rr) - vec (Rr (i)) (8) e vec (Rr) = Σm=1M vec (SmASmT ) + s2 vec (IP) (9) utilizando-se a propriedade vec (SmASmT ) = (Sm Sm) vec (A), onde representa o Produto de Kronecker, podemos reescrever a expressão (9) na seguinte forma: Sm) vec (A) + s2vec (IP) = D vec (A) + s2 vec (IP)(10) Substituindo (10) na expressão (8), obtém-se: vec (E(i)) = Dx + s2 j - q (i) (11) Sm), x = vec (A) onde D=Σm=1M (Sm H x = vec (h h ), j = vec (I) e q(i) = vec (Rr e(i)) . Assim, a expressão da função de custo em (7) incorporando as quantidades definidas torna-se: 12 A minimização da função de custo é realizada calculando a sua derivada conjugada (gradiente complexo) em relação ao vetor x e a potência do ruído s2 e igualando os valores a zero: dx* J (i) = DH Dx + DH j s2 - DH q (i) (13) ds J (i) = 2(j H Dx + s2 j H j - j H q (i)) (14) 2 onde x* representa o valor conjugado do vetor x. A expressão (4) pode ser reescrita como: vec (Rr) = Σm=1M (Sm 3. MINIMIZAÇÃO DE FUNÇÃO REAL COM MÚLTIPLAS VARIÁVEIS Igualando a derivada em relação a variável s2 a zero, temos: j H Dx + s2 j H j - j H q (i) = 0 (15) resultando em: s2 = 1 /P [j H q (i) - j H Dx] (16) Substituindo o valor de s2 dado em (16) na expressão (13), obtém-se: dx* J (i) = DH Dx + DH j s2 - DH q (i) = DH Dx + DH j 1 /P [j H q (i) - j H Dx] - DH q (i) = DH Dx + 1 /P DH j j H q (i) 1 /P DH j j H Dx - DH q (i) = 0 (17) Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 9-15 Cibernética (Tecnologia da Informação) e Comunicações cuja solução fornece uma estimativa xe do vetor x dada por: xe (i) = [ DH ( IP - 1/P j j H) D]-1 DH(IP - 1/P j j H) q (i) (18) uma vez obtida uma estimativa do vetor x e lembrando que x = vec (A) = vec (h hH), a aplicação da operação inversa resulta em hhH = A = unvec(x). Por meio de uma operação de decomposição por valor singular é possível obter uma estimativa he (do vetor h) como sendo o vetor singular associado ao máximo valor singular da matriz Ae (i) = unvec ( xe (i) ), esse valor é único pois a matriz tem rank (posto) unitário [1]. O vetor singular he obtido é, portanto, uma estimativa do vetor da resposta ao impulso do canal necessário ao nosso modelo matemático e, por ser decorrente de uma minimização quadrática, contém uma ambiguidade de fase escalar complexa. Após a estimação do canal, é necessário realizar a equalização do sinal recebido seguida da detecção do bloco de dados b(i) transmitido. Uma vez desenvolvido o modelo matemático e sendo este adequado e válido para o propósito a que se destina, inicia-se a etapa da realização das simulações. 4. Simulações Nesta seção, estão apresentados os resultados obtidos por meio de simulações empregando o método de Monte Carlo. O simulador foi desenvolvido em linguagem MATLAB 7.0 da MathWorks. O canal de propagação é modelado como um filtro de resposta ao impulso finita composto por L = 4 percursos (taps), cujos coeficientes são do tipo ht = at pt onde o índice é t = 1,2,..,L, at é uma variável gaussiana complexa de média nula e E[||at ||2 ]=1. Os valores de at são gerados randomicamente no início de cada trial e mantidos fixos ao longo de cada teste. Os pesos pt satisfazem a ΣLt=1 | pt |2= 1; sendo que os valores dos 4 pesos complexos utilizados são: p1 = 0.5957+j0.0101; p2 = -0.3273-j0.3472; Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 9-15 p3 = 0.2910-j0.0533; e p4 = 0.1285-j0.5599. A ambiguidade de escalar complexa dos estimadores é solucionada escolhendo o primeiro coeficiente h1 = at ( 0.5957+j0.0101) como referência. Na Figura 1, está ilustrada uma das possíveis respostas em frequência do canal randômico gerado aleatoriamente no inicio de um trial. Figura 1 Resposta em Frequência do Canal de Comprimento 4. Na Figura 2, estão ilustradas as curvas de desempenho do Erro Médio Quadrático da Estimativa do Canal versus o Número de Blocos de Símbolos Transmitidos (NB). Os valores de NB variaram de 0 a 2.500 blocos de símbolos, em um ambiente com razão sinal ruído Eb/No = 5 decibel. O número de subportadoras (é um valor de potência de 2) é M = 32; e o intervalo de guarda Zero Padding é suficiente para acomodar as parcelas atrasadas do sinal (G > L) com G = 8. O número de simulações foi de 100 trials (rodadas) sendo que os resultados ilustrados são a média do número de trials efetuados. Na legenda ‘casamento de correlação’ refere-se à estimativa obtida pelo método desenvolvido neste trabalho e ‘identificação de subespaço’ refere-se à estimativa obtida pelo método de decomposição por valor singular descrito em [5]. É possível 13 Deolinda Fontes Cardoso / Fabian David Backx / Raimundo Sampaio Neto observar que, conforme o número de símbolos aumenta, o desempenho de erro médio quadrático da estimativa obtida por casamento de correlação converge para o nível de 10-3, na média das 100 simulações realizadas, valor esse de erro médio inferior ao observado para o estimador obtido por ‘identificação de subespaço’ que atinge nível de 10-2. Além disso, o estimador proposto é consistente exibindo convergência assintótica para o seu valor real. Figura 2 Desempenho de Erro Médio Quadrático versus Número de Blocos de Símbolos (NB). equalização ZF e MMSE são praticamente coincidentes e apresentam desempenhos de BER, respectivamente, superiores aos dos estimadores obtido por ‘identificação de subespaço’ com equalização ZF e MMSE; e a diferença entre os dois pares de desempenhos tornam-se mais evidentes como o aumento da razão sinal ruído. Figura 3 Desempenho da Taxa de Erro de Bit (BER) versus Razão Sinal Ruído. 5. conclusões Na Figura 3, estão apresentadas as curvas de desempenho, obtidas pelo método Monte Carlo, da Taxa de Erro de Bit (BER) versus a Razão Sinal Ruído (Eb/ N0) numa faixa de -10 a +20 decibel e utilizaram-se a duas formas de equalização: a Zero Forcing (ZF) e a de Mínimo Erro Médio Quadrático (MMSE). O desempenho BER do sistema com os estimadores de canal obtidos por ‘casamento de correlação’ é similar ao do sistema empregando os estimadores obtido por ‘identificação de subespaço’ até cerca de – 5 dB. Quando Eb/ N0 > - 5 dB os quatro estimadores são melhorados com o aumento da Razão Sinal Ruído. Em 0 dB os níveis de BER, dos quatro estimadores, são ligeiramente menores que 2 x 10-1 sendo que os estimadores por ‘casamento de correlação’ com 14 Os sistemas de transmissão digital apresentam alta complexidade na modelagem matemática, principalmente devido aos diversos efeitos randômicos presentes no canal de propagação rádio móvel. Assim, uma modelagem do sistema, próxima da real, é bastante difícil e a análise do seu desempenho é praticamente impossível, mesmo adotando um número significativo de simplificações. Sendo assim, a representação do sistema real por meio de um modelo simulado, utilizando o computador, é a abordagem mais adequada, proporcionando vantagens significativas, entre as quais se destacam: a visualização global do funcionamento do sistema; a facilidade de implementar distintos cenários; a significativa redução da complexidade do problema;e a minimização de custos do projeto. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 9-15 Cibernética (Tecnologia da Informação) e Comunicações No presente estudo, desenvolvemos, para um sistema OFDM de transmissão de blocos por múltiplas portadoras, um modelo matemático baseado na técnica de casamento de correlação de dados. Essa técnica permite obter estimativas de parâmetros necessárias no modelo da simulação. Tais estimativas são obtidas a partir da minimização da função custo igualando o seu gradiente complexo a zero. Uma vez construído o modelo matemático do sistema, é possível desenvolver, em linguagem de programação, o modelo da simulação que permitirá investigar e avaliar o desempenho e a capacidade do sistema. A simulação empregou o método de Monte Carlo com o objetivo de comparar o desempenho do sistema utilizando estimativas obtidas pela da técnica de correlação proposta e utilizando estimativas obtidas por uma técnica tradicional de decomposição por valor singular (identificação de subespaço). Os resultados revelaram que as estimativas de canal obtidas por casamento de correlação permitem resultados de desempenho de Erro Médio Quadrático consistente com o aumento do número de blocos de símbolos NB processados no sistema e assintoticamente convergentes para o valor real (NB → ∞). Além disso, o emprego das estimativas obtidas por casamento de correlação permitiu ao sistema um desempenho de BER superior (menor Taxa de Erro de Bit) ao dos tradicionais métodos de subespaço em ambientes de baixa, média e alta razão sinal ruído; o que garante a aplicabilidade efetiva dos estimadores propostos para análise do desempenho de sistemas de transmissão de blocos por múltiplas portadoras. Referências [1] BACKX, Fabian David; Vinhoza, T. T. V.; NETO, Raimundo Sampaio. Blind Channel Estimation for ZeroPadded OFDM Systems Based on Correlation Matching. IEEE Vehicular Transactions on Communications. VTC’ 07, pp. 13081311, 2007. [2] DE LAMARE, Rodrigo C.; NETO, Raimundo Sampaio. LowComplexity Variable Step-Size Mechanisms for Stochastic Gradient Algorithms in Minimum Variance CDMA Receivers. IEEE Transactions on Signal Processing, vol. 54, n.6, Junho, 2006. [3] GU, M.; TONG, L. Geometrical Characterizations of Constant Modulus Receivers. IEEE Transactions on Signal Processing, vol. 49, n. 10, Outubro, 2001. [4] HONIG, M.; MADHOW, U.; VERDU, S. Blind Adaptive Multiuser Detection. IEEE Transactions on Information Theory, vol. 41, n. 4, p. 944-960, Julho, 1995. [5] MUQUET, B.; Wang, Z.; Giannakis, G. B.; Courville, M. De; Duhamel, P. CyclicPrefixing or Zero Padding for Wireless Multicarrier Transmissions? IEEE Transactions on Communications, vol. 12, n. 50, p. 2136-2148, 2003. [6] TRANTER, W. H.; SHANMUGAN, K. S. S.; RAPPAPORT, T. S.; KOSBAR, K. L. Principles of Communication Systems Simulation with Wireless Applications. Prentice Hall, 2003. [7] TSATSANIS, M. K.; XU, Z. Performance Analysis of Minimum Variance CDMA Receivers. IEEE Transactions on Signal Processing, vol. 46, n. 11, p. 3014-3022, Novembro, 1998. [8] _______. Blind adaptive Algorithm for Minimum Variance CDMA Receivers. IEEE Transactions on Communications, vol. 49, n. 1, Janeiro, 2001. [9] XU, Z.; TSATSANIS, M. K. Blind Channel Estimation for Long Code Multiuser CDMA Systems. IEEE Transactions on Signal Processing, v. 48, n. 4, Abril, 2000. 6. Agradecimento Os autores agradecem ao, então, Vice-Almirante Bernardo José Pierantoni Gambôa, quando Diretor do Centro de Análises de Sistemas Navais – CASNAV– MB, pelo valioso incentivo e o parcial financiamento para o desenvolvimento desta pesquisa realizada em conjunto com o Centro de Estudos em Telecomunicações da Pontifícia Universidade Católica do Rio de Janeiro, CETUC / PUC-Rio. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 9-15 15 Processos Decisórios A Contribuição das Cartas Vetoriais para a Construção da Consciência Situacional Capitão-de-Fragata Cleber Almeida de Oliveira, Dr. Centro de Apoio a Sistemas Operativos – Niterói, RJ – Brasil E-mail: [email protected] Capitão-de-Mar-e-Guerra Marcus Vinícius da Silva Roberto, Me. the decision maker to increase the situational awareness. This enhancement facilitates and directs the decision making process within the Observing, Orienting, Deciding and Acting (OODA) cycle, being a decisive point for an efficient and effective Command and Control (C2) . Centro de Apoio a Sistemas Operativos – Niterói, RJ – Brasil E-mail: [email protected] Keywords Capitão-de-Corveta (EN) Rodrigo Alves Natalizi, Me. Data fusion. OODA cycle. Situational awareness. Vector charts. Centro de Apoio a Sistemas Operativos – Niterói, RJ – Brasil E-mail: [email protected] Capitão-Tenente (T) André Kouzmine Centro de Apoio a Sistemas Operativos – Niterói, RJ – Brasil E-mail: [email protected] 1. INTRODUÇÃO Resumo Este artigo apresenta a contribuição que as informações do banco de dados das cartas eletrônicas vetoriais, empregadas com o conceito de fusão de dados, podem oferecer para o aprimoramento da compilação do quadro tático e visualização do cenário para o decisor de modo a elevar a consciência situacional. Este aprimoramento facilita e direciona o processo de tomada de decisão dentro do ciclo Observar, Orientar, Decidir e Agir (OODA), sendo ponto decisivo para que o Comando e Controle (C2) seja eficiente e eficaz. Palavras-chave Fusão de Dados. Ciclo OODA. Consciência situacional. Cartas vetoriais. The contribution of vector electronic charts for the construction of situational awareness Abstract This article presents the contribution provided by vector electronic charts database, used together with the concept of data fusion, to the improvement of tactical picture compilation and to the visualization of the scenario by 16 O fundamento básico de Comando e Controle (C2) no ambiente marítimo está no emprego oportuno da informação para produção de conhecimento, que servirá para levar o Comandante a tomar decisões corretas e empreender ações efetivas. O diferencial no teatro de operações está a favor daqueles que detêm a informação correta em tempo hábil e o desafio é selecionar a informação útil dentre a grande população de dados existentes. A construção da consciência situacional é um aspecto decisivo para que o ciclo de Comando e Controle (C2) seja eficiente e eficaz. O Centro de Operações de Combate (COC) representa o núcleo do processo decisório tático de um navio na condução da guerra. Este núcleo é composto por diversos operadores e sistemas que monitoram os ambientes acima e abaixo d’água por meio dos dados coletados pelos sensores, contribuindo para a compilação do quadro tático e para a construção da consciência situacional do decisor – Oficial Avaliador ou Comandante do navio. Esta consciência situacional, segundo Ly (et al., 2003), é um processo de interpretação da situação utilizando informações incompletas, haja visRevista Pesquisa Naval, Brasília, n. 23, 2010, p. 16-25 Processos Decisórios ta que há um espaço considerável entre as informações disponíveis e as informações necessárias para a obtenção de uma avaliação tática confiável. Nesse contexto, a inclusão de informações vetoriais provenientes de cartas náuticas eletrônicas e de camadas adicionais militares ou Additional Militar Layers (AML) incrementaria, substancialmente, a qualidade e quantidade de informações disponíveis para a compilação do quadro tático. O aumento de informações disponíveis por meio do emprego de mais sensores e de informações vetoriais implica a utilização do conceito de fusão de dados. No cenário marítimo, este conceito visa a aprimorar a consciência situacional transformando os acompanhamentos de um mesmo objeto físico observado e reportado por diferentes fontes em um único acompanhamento resultante. Além disso, visa a subsidiar a classificação e a identificação destes objetos físicos sem a necessidade da interferência humana no processo (OLIVEIRA, 2009). Os equipamentos destinados à leitura e à visualização de cartas eletrônicas vetoriais no formato S57 são denominados de Electronic Chart Systems (ECS) ou sistemas de carta eletrônica. Quando estes equipamentos são constituídos de componentes de hardware e de software certificados e homologados de acordo com a resolução CEI 61174, passam a ser denominados de Electronic Charts Display and Information Systems (ECDIS). Os equipamentos denominados Warship ECDIS (WECDIS) são ECDIS preparados para trabalhar em ambiente de guerra com as seguintes peculiaridades: • Capacidade de leitura de cartas vetoriais com formatos diferentes do S57 – padrões utilizados pela Organização do Tratado do Atlântico Norte (OTAN) como o DIGEST1, VPF2 e DNC3 ; DIGEST – Digital Geografic Information Exchange Standard (STANAG 7074) visando a troca de dados digitais entre produtores e utilizadores. 2 VPF – Vector Product Format. 3 DNC – Digital Nautical Chart – cartas oficiais no formato vetorial produzidas pelo US National Imaging and Mapping Agency. 1 Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 16-25 • Capacidade de ler e apresentar AML – informação adicional essencial para condução da guerra naval. Ex.: posição de minas, lanes de trânsito de submarinos, etc; • Possibilidade de incorporar interface com o sistema de combate – transferência da informação operacional do sistema de combate para o WECDIS. Atualmente na Marinha do Brasil (MB), alguns navios dispõem de ECDIS. Entretanto, as informações providas pelo banco de dados das cartas eletrônicas vetoriais são utilizadas exclusivamente para a navegação, não permitindo a interface com o sistema de combate de modo a aperfeiçoar a compilação do quadro tático. A proposta deste estudo é apresentar a contribuição que as informações do banco de dados das cartas eletrônicas vetoriais, empregadas com o conceito de fusão de dados, podem oferecer para o aprimoramento da compilação do quadro tático e visualização do cenário para o decisor, de modo a elevar a consciência situacional. Esse aprimoramento facilita e direciona o processo de tomada de decisão dentro do ciclo Observar, Orientar, Decidir e Agir (OODA), sendo ponto decisivo para que o ciclo de Comando e Controle (C2) seja eficiente e eficaz. 2. METODOLOGIA 2.1. Consciência Situacional Consciência situacional é a percepção dos fatores, das relações entre entidades, das condicionantes e da utilidade das informações coletadas que afetam a execução da tarefa durante um determinado período de tempo. Esta percepção permite ou proporciona ao decisor estar ciente do que se passa ao seu redor (conhecimento sobre o ambiente, o oponente e as suas próprias forças) e assim ter condições de focar o pensamento à frente da situação percebida, apoiado nas lições do passado, na experiência, no treinamento e na assessoria, ado17 Cleber Almeida de Oliveira / Marcus Vinícius da Silva Roberto / Rodrigo Alves Natalizi / André Kouzmine tando a decisão a ser executada, coerente com os objetivos da sua missão. Resumindo, consciência situacional é o domínio das informações que influenciam no teatro de operações. A Figura 1 apresenta um modelo dinâmico proposto por Miller e Shattuck (2006). Este modelo descreve o processo cognitivo envolvido na construção da consciência situacional, considerando os papéis da tecnologia, dos seres humanos e da interação entre eles no processo pelo qual um operador obtém as informações necessárias para avaliar uma situação e realizar uma decisão. O modelo contém uma série de seis elementos ovais de variados tamanhos e três lentes (Figura 1). Os três elementos ovais no lado esquerdo do modelo (1, 2 e 3) representam o lado tecnológico do sistema, enquanto os três elementos ovais da direita (4, 5 e 6) representam os processos cognitivos e perceptuais humanos. O elemento oval 1 representa o cenário real contendo os dados das forças inimigas, amigas e neutras, além das informações da região e do clima. O elemento oval 2 é um subconjunto do cenário real que representa apenas os contatos detectados e as informações disponibilizadas pelo sistema do sensor. O elemento oval 3 representa o subconjunto de informações que são disponibilizadas na tela do operador. Esse elemento pode variar dependendo da configuração realizada pelo operador, como descentralização da tela, escala, inclusão de anéis de distância etc. Os elementos ovais 4, 5 e 6 no lado direito do modelo representam a percepção das informações disponibilizadas, a compreensão da situação corrente e a projeção individual do evento corrente para o futuro, respectivamente. As lentes A, B e C representam a influência da situação local, dos aspectos doutrinários e aspectos cognitivos (experiência, treinamento) dos operadores, respectivamente. A Figura 2 apresenta um modelo dinâmico proposto por Oliveira (2009), que extrapola o modelo de Miller e Shattuck (2006), para descrever o processo cognitivo envolvido na construção da consciência situacional considerando múltiplos FIGURA 1 Modelo Dinâmico para a Construção da Consciência Situacional. Fonte: MILLER e SHATTUCK (2006). 18 Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 16-25 Processos Decisórios FIGURA 2 Modelo para a Consciência Situacional do Decisor. Fonte: Oliveira, 2009. sensores com seus respectivos operadores e da interação entre eles no processo pelo qual um decisor obtém as informações necessárias para avaliar uma situação e realizar uma decisão apoiada em sua experiência, treinamento e conhecimento. Esta extrapolação ilustra a necessidade de fusão dos dados para a obtenção de uma visualização integrada e otimizada do cenário para o decisor que, a partir daí, projetaria o cenário de acordo com a sua capacidade perceptiva e cognitiva. As informações das cartas eletrônicas vetoriais participariam do processo de fusão aprimorando o processo de visualização integrada do decisor. 2.2. Cartas eletrônicas As cartas eletrônicas são produzidas em dois formatos: raster e vetorial. Conforme Monteiro (2001), a carta no formato raster representa a imagem georreferenciada da carta de papel e, consequentemente, possui uma simbologia familiar aos navegantes. As cartas em formato vetorial são Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 16-25 constituídas por um conjunto de pontos, linhas ou polígonos, especificados pelas suas coordenadas, e aos quais correspondem a determinados atributos. A palavra vetorial deve ser entendida como a representação de conjunto de pares de coordenadas, denominados vetores, aos quais se podem associar inúmeros atributos. Essas cartas possuem grande flexibilidade na apresentação da imagem, pois permitem selecionar apenas determinados tipos de informação, tornando a imagem mais limpa e evitando, assim, excesso de informação. A possibilidade de associação de diversos atributos a cada vetor permite aos sistemas de leitura de cartas neste formato adicionar alarmes e avisos que serão acionados em circunstâncias definidas pelo operador como, por exemplo, um alarme sempre que a profundidade, que é um dos atributos associados a cada vetor, for inferior a um dado valor. Contudo, o processo de produção das cartas no formato vetorial é bem mais demorado do que aquele empregado para produzir as cartas no formato raster. 19 Cleber Almeida de Oliveira / Marcus Vinícius da Silva Roberto / Rodrigo Alves Natalizi / André Kouzmine Apenas as cartas vetoriais que estejam em conformidade com a norma S-57 ou S-100 podem tomar a designação de cartas eletrônicas de navegação. De acordo com Ward (2008), em 1992, a norma S-57 foi adotada formalmente pela Organização Hidrográfica Internacional (OHI) como o padrão de transferência de dados digitais entre bases hidrográficas oficiais e para a distribuição aos diversos usuários. Entretanto, esta norma não foi amplamente aceita no domínio de Sistema de Informações Geográficas (SIG), pois apresentava algumas limitações e estava sendo utilizada exclusivamente para a codificação de cartas eletrônicas de navegação para uso em ECDIS. A norma S-100 foi validada em janeiro de 2010. Esta norma suporta uma grande variedade de fontes de dados digitais relacionados a hidrografia, incluindo imagem, 3D, dados variando no tempo (x, y, z e tempo) etc. A Figura 3 ilustra a linha do tempo com a validade das normas estabelecidas pela OHI. Observa-se que desde janeiro de 2010 a norma S-57 passou a ser um padrão superado, apesar de ainda válido, coexistindo com o novo padrão S-100. As principais vantagens do emprego de cartas eletrônicas vetoriais de navegação são a apresentação consolidada das informações, a capacidade de adequação a todos os níveis de decisão, o georreferenciamento das informações e a agilidade na construção da consciência situacional com a incorporação da tecnologia de fusão de dados. 2.3. Processo de Fusão de Dados A Figura 4, adaptada de Luo e Kay (1989), apresenta genericamente um sistema de fusão e integração de dados considerando o estabelecimento de uma hierarquia entre os sensores ou fontes de informação. As linhas tracejadas representam as influências do sistema em cada um dos nós, onde são realizados os processos de fusão. Na situação ilustrada, os sensores ou fontes de informação foram ordenados de A a N em função do erro de predição de cada sensor. Portanto, os rastros dos contatos observados pelo sensor ou fonte A prevalecem aos rastros provenientes do sensor ou fonte B. Os rastros da resultante F(AB) do processo de associação de A com B prevalecem aos rastros provenientes do sensor ou fonte C e, assim, sucessivamente. No final, a resultante F(ABC...N) apresenta a estimação da FIGURA 3 Padrões de Cartas Eletrônicas. 20 Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 16-25 Processos Decisórios FIGURA 4 Representação Genérica de um Sistema de Fusão e Integração de Dados. atualizações. Como a velocidade das plataformas marítimas são baixas (valor modal de 9 nós), pode-se afirmar que se for utilizada uma taxa de atualização de 1 minuto, praticamente não haverá mudanças na posição das unidades móveis. Esse procedimento permite realizar uma comparação direta entre os dados de cada sensor para o processo de gating e de associação no espaço. O bloco de gating visa a eliminar a comparação par a par de observações inapropriadas, criando uma janela em torno das variáveis de posição do objeto a ser comparado. A resultante do teste de gating classifica um acompanhamento de um sensor em uma de duas categorias, Blackman (1986): a) Candidato a se associar a um objeto já acompanhado ou b) Observação inicial de um novo objeto. Fonte: Adaptado de Luo e Kay (1989). posição e da classificação de todos os objetos acompanhados do ambiente monitorado. Considera-se, nesse modelo, que uma das fontes de informação seja as informações provenientes das cartas vetoriais. O sistema de fusão é formado pelos processos de registro, de alinhamento dos dados, de gating para a associação e de estimação do vetor de estado. O registro, ou banco de dados associado, permite que o sistema guarde a informação do contato previamente adquirido por determinado sensor, possibilitando que o processo de decisão utilize tal informação. O processo de alinhamento dos dados se torna necessário a fim de que as informações de cada sensor sejam traduzidas e convertidas por meio dos respectivos protocolos para métricas comuns e alinhadas de acordo com a definição da janela de tempo dos dados a serem considerados. A definição da janela de tempo aplicada ao banco de dados de acompanhamentos depende da taxa de atualização dos dados dos sensores e da mudança relativa da posição do contato entre as Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 16-25 Na literatura, Blackman (1986), Bar-Shalom e Blair (2000) e Brookner (1998) descrevem diversas técnicas de gating (circulares, retangulares, eliptícas etc). Neste estudo foi utilizada a técnica mais simples, que consiste na criação de uma janela circular em torno das variáveis de posição reportadas do objeto a ser comparado. Assim, utilizando a descrição dos sensores da Figura 4, é possível definir uma matriz global que represente os acompanhamentos do sensor B que estejam dentro da janela de cada acompanhamento do sensor A. O valor 1 nesta matriz indica que há um objeto físico de B candidato a associar-se com o objeto observado pelo sensor A. Esta janela é definida a partir da seguinte relação: (1) onde, VAi e VBj representam as dimensões de posição das observações Ai e Bj, respectivamente. O Filtro representa uma constante pré-determinada, definida geralmente a partir do desvio padrão residual do erro de predição de cada sensor. A associação consiste em aplicar o algoritmo responsável por verificar se os dados de acompanhamento de um contato obtidos por um sensor 21 Cleber Almeida de Oliveira / Marcus Vinícius da Silva Roberto / Rodrigo Alves Natalizi / André Kouzmine são compatíveis com as observações obtidas por outros sensores. Esta associação é obtida definindo medidas de similaridade que quantificam a proximidade dos contatos obtidos por diferentes sensores, levando em consideração a resolução de cada sensor. deste procedimento de estimação é de que nenhuma composição de dados é realizada, reduzindo, assim, o tempo de processamento. Neste estudo, o algoritmo proposto por Oliveira (2009) foi empregado para a associação dos dados provenientes do RADAR com os dados provenientes do equipamento Automatic Identification System (AIS). Emprega-se o conceito de decisão nebulosa no cálculo da pertinência de associação de contatos obtidos por múltiplos sensores a um único objeto físico. No cenário marítimo, o processo de fusão de dados visa a transformar os acompanhamentos de um mesmo objeto físico observado e reportado para o sistema por diferentes dispositivos de entrada (RADAR e outros sensores) em um único acompanhamento resultante. Além disso, possibilita a realização de inferências e a obtenção de mais informações sobre o objeto em comparação à análise dos acompanhamentos reportados pelos sensores isoladamente. Depois de efetuada a associação paramétrica dos contatos é observada a necessidade de fusão dos atributos dos contatos. As técnicas de estimação irão determinar o vetor de estado que melhor defina a posição e a identidade do contato observado. A estimação do vetor de estado pode ser dividida em dois segmentos: vetor de estado de posição e vetor de estado de classificação e estimação da identidade do contato. A equação 2 foi apresentada por Byun (et al., 2004) para a fusão de rastros de dois sensores, assumindo que os erros dos estimadores de estado de cada sensor são independentes. (2) onde, e representam a estimação de estado a partir dos sensores i e j, respectivamente. e são suas matrizes de covariância. Neste trabalho, considera-se que os erros de predição de cada sensor são conhecidos (fase de alinhamento dos sensores de bordo). Nesse contexto, as observações do sensor de menor erro de predição serão escolhidas para a estimação do vetor final de posição. A vantagem 22 3. RESULTADOS Utilizando a metodologia descrita é possível implementar o processo de combinação de dados, provenientes de cartas eletrônicas e outros dispositivos, de modo a aprimorar a construção da consciência situacional. Na Figura 5, experimento controlado, observa-se o processo de associação entre os dados originários do radar de navegação (fonte A) com a camada de informação vetorial das cartas eletrônicas (fonte B). Os cinco objetos detectados pelo RADAR de navegação possuem classificação desconhecida e constituem a camada de informação básica do sistema. Na situação ilustrada, a camada vetorial representa a união da camada adicional militar com as informações do posicionamento das plataformas e as informações de batimetria do banco de dados da carta eletrônica. A Figura 6 ilustra o algoritmo de associação empregado nesta etapa. A Figura 7 ilustra a resultante F(AB) do processo de associação dos dados do sensor A com as informações da camada vetorial. Observa-se que nesta integração de dados foi possível reduzir o número de contatos desconhecidos de cinco (5) para dois (2) contatos. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 16-25 Processos Decisórios FIGURA 5 Camadas das fontes de informação A e B. FIGURA 6 Algoritmo de Associação com a Camada Vetorial. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 16-25 23 Cleber Almeida de Oliveira / Marcus Vinícius da Silva Roberto / Rodrigo Alves Natalizi / André Kouzmine FIGURA 7 Fusão e Integração de Dados – F(AB). A partir da camada integrada F(AB) é possível realizar o processo de fusão com outra fonte ou sensor (fonte C). Na situação ilustrada na Figura 8, ocorre o processo de fusão da camada vetorial integrada com a camada de informação proveniente do sistema de identificação automática (Automatic Identification System - AIS). opera na faixa VHF (Very High Frequency) com protocolo aberto e sua finalidade é disseminar informações do navio, como posição GPS (Global Positioning System), rumo, velocidade, nome da embarcação, indicativo internacional etc. automaticamente sem a interferência da tripulação e com uma taxa de envio dos dados em torno de 2s. O AIS é um sistema especificado pela International Maritime Organization (IMO), de emprego obrigatório por todos os navios com arqueação bruta acima de 300 toneladas envolvidos em viagens internacionais, navios de passageiros e navios de carga com mais de 500 toneladas. Este sistema A Figura 9 ilustra a resultante final do processo de fusão. Pode-se observar uma redução significativa dos contatos com classificação desconhecida (5 para 1) aprimorando a consciência situacional e facilitando a decisão relativa à definição da prioridade de esclarecimento dos contatos. FIGURA 8 Camada Integrada F(AB) e camada AIS (fonte C). 24 Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 16-25 Processos Decisórios FIGURA 9 Camada Integrada F(ABC). 4. CONCLUSÃO O emprego de cartas eletrônicas vetoriais aliado à incorporação da tecnologia de fusão de dados em sistemas de compilação do quadro tático/operacional ou sistemas de Comando e Controle traduzem em benefícios operacionais significativos, pois permitem uma visualização integrada e otimizada do cenário tático/operacional. Esta visualização facilita a projeção do cenário de acordo com a capacidade perceptiva e cognitiva do decisor, aprimorando a construção da consciência situacional e facilitando o processo decisório nos navios e nos Centros de Comando. REFERÊNCIAS BAR-SHALOM, Y.; BLAIR, W. D. Multitarget-Multisensor Tracking: Applications and Advances. Vol. III, Artech House radar library, Los Angeles , 2000. BLACKMAN, S. S. Multiple-Target Tracking with Radar Application. Artech House, Norwood, MA, 1986. BROOKNER, E. Tracking and Kalman Filtering made easy. Sudbury: Wiley Interscience, 1998. Byun, S. H. et al. Implementation of multi-vessel tracking algorith using multiple marine radar systems. In: IEEE Tecno-Ocean, 2004, Kobe. Proceedings... New York: IEEE, 2004. V. 4 p. 2242-2248. LUO, R.; KAY, M. Multisensor integration and fusion in intelligent systems, IEEE Transactions on Systems, Man, and Cybernetics, 1989, 19(5), 901-931. LY, T. C. et al. Multiple hypotheses situation assessment. IEEE Proceedings of the sixth international conference of information fusion, 2003, Vol 2, pp.972-978. MILLER, N. L.; SHATTUCK, L. G. A dynamic process model for the design and assessment of network centric system. In: International Command and Control Research Technology Symposium. 11, 2006, Cambridge. Proceedings... Cambridge: CCRP, 2006. MONTEIRO, S. ECDIS e WARSHIP ECDIS: a base da navegação do futuro. Anais do Instituto Hidrográfico, n. 15, p. 7-16, 2002. OLIVEIRA, C. A. Modelo para apoio à decisão no processo de classificação de unidades móveis no cenário marítimo. 2009. 111p. Tese (Engenharia Mecânica e Aeronáutica) – Instituto Tecnológico de Aeronáutica, Brasil, São José dos Campos. WARD, R. IHO S-100, Hydro International, v.12 n. 4, 2008. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 16-25 25 Processos Decisórios Avaliação dos Portos Brasileiros por meio do Índice de Malmquist Capitão-de-Corveta Renato Leite Fernandes Mestre em Engenharia de Produção pela Universidade Federal do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. Centro de Apoio a Sistemas Operativos – Niterói, RJ – Brasil. E-mail: [email protected] Resumo Este artigo avalia, usando o índice de Malmquist, a produtividade dos portos brasileiros ao longo dos quatro anos que antecederam a crise econômica global deflagrada no final do ano de 2008. Tendo em vista o elevado nível de globalização das atividades econômicas e, por conseguinte, o aumento do volume do comércio mundial, a pesquisa apresentada neste artigo busca identificar os portos que apresentaram evolução e mudanças na fronteira de eficiência, demonstrando que durante aqueles quatro anos a maior parte dos portos brasileiros tornaram-se mais eficientes e experimentaram melhorias tecnológicas. Palavras-chave Produtividade. Portos Brasileiros. Índice de Malmquist. Evaluation of Brazilian Seaport by Using Malmquist Index Abstract This article evaluates the productivity of Brazilian seaports throughout the four years prior to the global economic crisis triggered by the end of 2008 using the Malmquist index. Due to the high level of globalization of economic activities, and therefore the growth of the volume of world trade, the research presented in this article seeks to identify the seaports which present developments and changes in the efficiency frontier, indicating that during the period most of the Brazilian seaports become more efficient and experienced technological improvements. Keywords Productivity. Brazilian Seaports. Malmquist Index. 26 1. INTRODUÇÃO Nos últimos 20 anos, o setor portuário tem se desenvolvido bastante e despertado o interesse da comunidade acadêmica em relação à medição da eficiência das atividades produtivas dos portos. A Análise Envoltória de Dados (DEA – Data Envelopment Analysis) e a Análise da Fronteira Estocástica (SFA – Stochastic Frontier Analysis) são métodos utilizados para estimar ou para identificar a fronteira de desempenho eficiente da melhor prática, em indústrias ou em uma amostra de empresas, e que vem sendo cada vez mais utilizados como uma forma de abordagem holística, buscando refletir melhor a realidade. Esses métodos possuem características que as tornam indicadas para a medição de desempenho de portos e de terminais que movimentam carga, utilizando fronteiras por benchmark, chamadas frontier benchmarking. Além de permitir identificar uma fronteira de eficiência, tais métodos fornecem um escore para cada empresa analisada em relação à fronteira e possibilitam a avaliação da eficiência relativa e comparativa de cada uma delas em relação à fronteira. A Análise Envoltória de Dados, desenvolvida por Charnes (1978) possui uma vantagem importante sobre os demais métodos: não requer a especificação de uma função de produção ou de custo, permitindo calcular a eficiência técnica, analisando as unidades em conjunto, desde que usem as mesmas entradas (inputs) e que produzam as mesmas saídas (outputs), com tecnologias similares de produção. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 26-33 Processos Decisórios De acordo com a Secretaria Especial de Portos da Presidência da República – SEP/PR (2009) –, o transporte marítimo de carga movimenta anualmente cerca de 700 milhões de toneladas de mercadorias, respondendo por mais de 90% das exportações brasileiras. Isso significa que o setor portuário tem uma grande importância para a economia do país e, portanto, representa um relevante elemento do Poder Marítimo nacional. o índice de Malmquist empregando técnicas de programação linear. Assim, este artigo inova na análise dos portos brasileiros em relação à eficiência técnica, adotando o índice de Malmquist, que é um modelo DEA. Ressalta-se que o índice avalia a mudança na produtividade de uma DMU (Decision Making Units) entre dois períodos de tempo: t (inicial, no caso 2005) e t+1 (final, no caso 2008). O índice pode ser decomposto em duas componentes: a primeira é chamada de catch up e representa a evolução da eficiência, ou seja, a mudança na eficiência técnica entre dois períodos de tempo; a segunda é a frontier shift, que representa o deslocamento da fronteira de eficiência, ou seja, a mudança tecnológica entre dois períodos de tempo. O objetivo do uso desse modelo é avaliar a variação de eficiência portos brasileiros no período de 2005 a 2008, ou seja, no período que antecedeu a crise econômica mundial iniciada em 2008, a fim de identificar os portos que apresentaram melhor desempenho no período. O presente artigo está estruturado da seguinte forma: a Seção 2 apresenta a metodologia empregada na pesquisa, bem como informações sobre os portos brasileiros. A Seção 3 apresenta os dados e os resultados obtidos com a utilização da metodologia. Por fim, a Seção 4 apresenta as conclusões e as considerações finais. 2. METODOLOGIA 2.1. Índice de Malmquist O primeiro estudo a utilizar a metodologia DEA na avaliação de desempenho de portos foi apresentado por Roll e Hayuth (1993), e nos últimos 15 anos vários outros estudos foram produzidos utilizando DEA para avaliar o desempenho portuário. O conceito de índice de produtividade de Malmquist, de acordo com Sollero (2007), foi introduzido por Malmquist em 1953, sendo que Färe (1992) forneceu a fundamentação para construir Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 26-33 Em relação ao setor portuário, Barros (2003) avalia de forma pioneira a evolução da produtividade dos portos portugueses utilizando o índice de Malmquist. Para maiores informações, o trabalho de Fernandes (2010) traz uma pesquisa ampliada da literatura referente ao assunto. Mantendo os outputs constantes, a recíproca da função de distância de Shephard, sob a ótica dos inputs e assumindo retornos constantes de escala, serve como uma medida de eficiência de Farrell, fornecendo uma medida de eficiência técnica. representa o Considerando que vetor de inputs N e que representa o vetor de outputs M, ambos não negativos, observados em um período t, o conjunto de inputs em um período t representa a combinação viável de inputs que podem produzir outputs e é representado como: (1) A isoquântica para o conjunto de inputs é definida como: (2) A função distância de Shephard é definida como: (3) 27 Renato Leite Fernandes As DMUs eficientes usam inputs que fazem parte da e tem . . As DMUs ineficientes apresentam Gráfico 1 Variação da Fronteira de Eficiência entre dois períodos. O índice de eficiência de Malmquist (MALM) toma a seguinte forma: (4) Reorganizando (4) tem-se: (5) Onde a componente catch up (mudança de eficiência) é representada por e a componente frontier shift (progresso tecnológico) é representada por . A seguinte relação é válida: MALM = EFFCH x TECH. Valores de MALM, EFFCH e TECH menores do que 1 indicam crescimento da produtividade, ganho na eficiência e progresso tecnológico. Por outro lado, valores de MALM, EFFCH e TECH maiores do que 1 indicam decréscimo da produtividade, perda na eficiência e regressão tecnológica. O Gráfico 1 ilustra a construção da função de distância e os componentes do índice de produtividade de Malmquist sob a ótica dos inputs. Assume-se que a variação do tempo ocorre do 1º período (t) até o 2º período (t+1), sendo que o conjunto de possibilidades de inputs no 1º período inclui todos os pontos a direita da isoquântica L1(y) e o conjunto de possibilidades de inputs no 28 Fonte: Barros e Weber (2009) 2º período inclui todos os pontos a direita da isoquântica L2(y). A DMU para a qual é calculada a variação da eficiência e de produtividade emprega o vetor de input A no 1º período e o vetor de input E no 2º período. Em ambos os períodos, a DMU produz o mesmo nível de produção (y), contudo utiliza uma quantidade excessiva de inputs e é tecnicamente ineficiente. A função distância no 1º período é dada por , e por no 2º período. A distância entre as duas isoquânticas delimitadas pelos períodos de tempo é calculada e como . Sendo assim, o índice de Malmquist é calculado , a compo- como nente catch up (mudança na eficiência técnica) é calculada como e a componente Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 26-33 Processos Decisórios frontier shift (mudança tecnológica) é calculada como . 2.2. Portos Brasileiros Embora o sistema portuário tenha passado por períodos de estatização e privatização das suas atividades, de acordo com Fernandes (2010), desde o período colonial os portos brasileiro tem representado um elemento de elevada importância para o desenvolvimento do país. Em 1993, um novo modelo de privatização surgiu com a publicação da Lei nº 8.630, chamada Lei de Modernização dos Portos, que estabeleceu uma série de mudanças visando dinamizar as atividades portuárias. Em 2001, a Lei nº 10.233 criou a ANTAQ, uma agência federal responsável pela regulação, controle tarifário, estudo e desenvolvimento do transporte hidroviário nacional. Em 2007, a Medida Provisória nº 369/2007 criou a Secretaria Especial de Portos da Presidência da República (SEP/PR) com o objetivo de renovar o modelo de gestão do setor portuário brasileiro, no sentido de elevar o patamar de competitividade dos portos nacionais em relação aos portos mais eficientes do mundo. De acordo com a SEP/PR, o sistema portuário brasileiro é composto por 37 portos públicos, entre marítimos e fluviais. Existem ainda 42 terminais de uso privativo e três complexos portuários que operam sob concessão à iniciativa privada. O presente estudo examinou apenas os principais portos públicos brasileiros: Belém, Cabedelo, Fortaleza, Ilhéus, Imbituba, Itaguaí, Itajaí, Itaqui, Maceió, Manaus, Natal, Paranaguá, Recife, Rio de Janeiro e Rio Grande, entre outros. A redução dos custos com o transporte dos contêineres está na base da atratividade de carga e, segundo a CMA CGM, uma das maiores transportadoras do mundo, o custo global para a exportação de um contêiner no Brasil gira em torno Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 26-33 de R$ 4.000,00, sendo que somente o custo operacional de embarque e de descarga de um contêiner é de US$ 225,00, ou seja, aproximadamente três vezes maior do que o valor observado nos portos asiáticos (CARLINI, 2008). 3. RESULTADOS 3.1. Dados dos Portos Para esta pesquisa, foi considerada uma amostra contendo os 23 principais portos públicos do Brasil, no período compreendido entre o ano de 2005 e o de 2008. As informações contidas neste trabalho foram colhidas junto às administrações portuárias por meio de contato telefônico, e-mail, bem como por meio de pesquisa nos sites dos terminais, na Internet. Outra parcela de informações foi extraída do livro Portos e Terminais Marítimos do Brasil e do Anuário Estatístico no site da ANTAQ. As variáveis são apresentadas no Quadro 1, a seguir, bem como seus valores referentes ao ano de 2005 e ao de 2008. Os outputs utilizados são: quantidade de granéis sólidos, quantidade de granéis líquidos e quantidade de carga geral movimentada – em toneladas –. Os inputs são: comprimento do cais, área portuária e número de trabalhadores portuários avulsos (TPAs). 3.2. Avaliação dos Resultados obtidos Os resultados decorrentes da aplicação do modelo matemático são apresentados no Quadro 2, a seguir, os valores para o índice de Malmquist e para suas componentes catch up e frontier shift. Pode-se observar que os escores referentes ao índice de Malmquist – variação da produtividade – são menores do que 1 (MALM<1) para 16 portos da amostra, explicitando, assim, que a maior parte dos portos experimentou um aumento da produtividade no período considerado. A pontuação média é de 0,82. Os portos que apresentaram redução na produtividade são: Fortaleza, Imbituba, Maceió, Manaus, Natal, Recife e São Francisco do Sul. 29 Renato Leite Fernandes Quadro 1 Variáveis consideradas no Modelo Matemático. A componente catch up do índice de Malmquist contempla a variação de eficiência técnica e, segundo Barros e Weber (2009), pode traduzir a difusão de melhores práticas na gestão da atividade portuária, sendo atribuída ao planejamento de investimentos, experiência técnica e organização nos portos. 30 No período dos anos 2005 e 2008, pode-se observar a partir dos escores gerados que a variação da eficiência é menor que um (EFFCH<1) para 10 portos da amostra, significando que houve melhorias na eficiência técnica durante esse período. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 26-33 Processos Decisórios Para oito portos, houve retrocesso em relação à variação da eficiência (EFFCH>1), sendo que para cinco portos praticamente não houve variação da eficiência técnica (EFFCH=1). Quadro 2 Resultados obtidos pela modelagem para o período dos anos 2005-2008. A componente frontier shift diz respeito à mudança tecnológica e traduz o nível de inovação aplicado aos portos, isto é, diz respeito à adoção de novas tecnologias baseadas nas melhores práticas (BARROS e WEBER, 2009). Observa-se que o índice é inferior a 1 (TECH<1) para quase todos os portos brasileiros, indicando que a inovação aumentou de forma relevante durante o período, fruto de investimentos significativos em novas tecnologias, bem como em novas metodologias, novos procedimentos e em novas técnicas. A segregação do índice Malmquist em suas duas componentes permite identificar e classificar os portos brasileiros em relação às mudanças ocorridas durante o período dos anos 2005 e 2008. Assim, de acordo com o demonstrado no Quadro 2, é possível observar as seguintes combinações: • MALM <1 / EFFCH <1 / TECH <1 - Fazem parte desse grupo os portos que obtiveram os melhores resultados, no período pesquisado, em termos das mudanças ocorridas, visto que a melhoria da produtividade global (MALM) é função direta da elevação do nível de eficiência técnica (EFFCH) e do aspecto tecnológico das atividades dos portos (TECH). Os portos desse grupo são: Cabedelo, Ilheus, Itaguaí, Paranaguá, Rio de Janeiro, Salvador, Santos, Suape, Vila do Conde e Vitória. • MALM <1 / EFFCH ≥1 / TECH <1 - Nesse grupo, embora os resultados apresentem a melhoria da produtividade e o melhor posicionamento dos portos em relação à fronteira tecnológica de eficiência, o nível de eficiência técnica permaneceu inalterado para os portos de Aratu, Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 26-33 Fonte: Resultados da Pesquisa Itajaí, Itaqui e São Sebastião, sendo que para os portos de Belém e Rio Grande houve redução do nível de eficiência técnica. • MALM >1 / EFFCH >1 / TECH <1 - Fazem parte desse grupo os portos de Fortaleza, Imbituba, Maceió, Natal, Recife e São Francisco do Sul. Durante o período pesquisado, esses portos experimentaram uma queda de produtividade, sendo que o nível de eficiência técnica também regrediu, mesmo assim houve uma melhora em relação às mudanças tecnológicas. 31 Renato Leite Fernandes • MALM >1 / EFFCH ≥1 / TECH >1 - Somente Manaus se enquadrou neste grupo, sendo que esse porto apresentou redução de produtividade e regressão em relação às mudanças tecnológicas, permanecendo com o mesmo nível de eficiência técnica. A partir das combinações possíveis entre MALM e EFFCH e TECH é possível verificar que a principal causa do crescimento da produtividade dos portos brasileiros se deve ao progresso tecnológico que esses portos experimentaram durante o período pesquisado. 4. CONCLUSÕES Neste estudo, a produtividade dos 23 principais portos do Brasil foi estimada com a utilização do índice de Malmquist, para o período do ano de 2005 ao de 2008. A variação da produtividade foi composta pelas suas duas componentes: catch up, representando a evolução da eficiência técnica no período, e frontier shift, representando o deslocamento da fronteira de eficiência, isto é, sinalizando a mudança tecnológica entre os anos 2005 e 2008. Durante o período verificado, os portos brasileiros experimentaram um aumento da produtividade global, pois os resultados da aplicação do índice de Malmquist, no geral, mostraram que os portos tornaram-se mais eficientes e que experimentaram um relevante progresso tecnológico. Sendo assim, os portos avaliados que obtiveram os melhores resultados em relação ao aumento da produtividade foram: Cabedelo, Ilheus, Itaguaí, Paranaguá, Rio de Janeiro, Salvador, Santos, Suape, Vila do Conde e Vitória. Ressalta-se que isso não significa, necessariamente, que esses portos se apresentam tecnicamente eficientes de acordo com o modelo matemático, mas, tão somen32 te, que os portos aumentaram sua produtividade global. Destaque especial deve ser dado aos portos de Ilheus e Vila do Conde que apresentaram o maior nível de aumento de produtividade. Apesar da maioria dos portos brasileiros ter apresentado bons resultados, foi verificado que alguns portos precisam aumentar a eficiência e a produtividade. Portanto, faz-se necessária a adoção de políticas públicas e de medidas gerenciais, por parte do governo e dos operadores portuários, para implementar as mudanças que possam gerar o aumento da produtividade. REFERÊNCIAS Anuário Estatístico Portuário. Brasília: Agência Nacional de Transportes Aquaviários - ANTAQ, 2010. Disponível em: <http://www.antaq.gov.br/Portal/estatisticasanuario.asp>. Acesso em: 01 ago. 2009. BARROS, C. P. The Measurement of Efficiency of Portuguese Seaport Authorities with DEA. International Journal of Transport Economics, v.30, 335-354, 2003. BARROS, C. P.; WEBER W. L. Productivity growth and biased technological change in UK airports. Transportation Research Part E: Logistics and Transportation, v.45 n.4, pp.642-653, 2009. BERGER, A.; BERGER, F. R. Portos e Terminais Marítimos do Brasil. Joinville, SC: Editora Bela Catarina, 2009. CARLINI, N. CMA CGM - Relatório para a Comissão de Serviços e Infraestrutura do Senado Federal. Brasília, 2008. Disponível em: <http://www.senado.gov.br/sf/comissoes/ci/ ap/AP_20081204_NelsonCarlini.pdf> . Acesso em: 10 jun. 2009. CHARNES, A.; COOPER, W. W.; RHODES, E. Measuring the efficiency of decision making units. European Journal of Operational Research, n.2, pp.429–444, 1978. FARE, R.; S. GROSSKOP; B. LINDGREN; P. ROSS.Productivity changes in Swedish pharmacies, 1980 – 1989: a non parametric approach. Journal of Productivity Analysis, n.3, pp.85-101. FERNANDES, R. L. Avaliação dos terminais que movimentam Contêineres no Brasil através da Análise Envoltória de Dados. Originalmente apresentada como dissertação de mestrado, COPPE/UFRJ, Rio de Janeiro, RJ, 2010. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 26-33 Processos Decisórios ROLL, Y.; HAYUTH, Y. Port performance comparison applying data envelopment analysis (DEA). Maritime Policy and Management, v.20, n.2, pp.153-161, 1993. SEP/PR – SECRETARIA ESPECIAL DE PORTOS DA PRESIDÊNCIA DA REPÚBLICA. Sistema Portuário Nacional. Brasília, 2009. Disponível em <http://www.portosdobrasil.gov.br/ sistema-portuario-nacional>. Acesso em: 31 out. 2009. SOLLERO, M. K. V. Avaliação de Empresas de Distribuição de Energia Elétrica através da Análise Envoltória de Dados com Integração das perspectivas do regulamento e das Concessionárias. Originalmente apresentada como tese de doutorado, COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2007. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 26-33 33 Sensores, Guerra Eletrônica e Guerra Acústica Desenvolvimento de um Sistema de Patrulhamento Tático Multi-Operacional Utilizando Veículos Aéreos Não-Tripulados Rodrigo Kuntz Rangel Mestre em Engenharia Eletrônica e Computação pelo Instituto Tecnológico de Aeronáutica – São José dos Campos, SP – Brasil. BRVANT – Soluções Tecnológicas – Mogi das Cruzes, SP – Brasil. E-mail: [email protected] Capitão-de-Fragata Cleber Almeida de Oliveira Doutor em Engenharia Aeronáutica e Mecânica pelo Instituto Tecnológico de Aeronáutica – São José dos Campos, SP – Brasil. Centro de Apoio a Sistemas Operativos – Niterói, RJ – Brasil. E-mail: [email protected] Karl Heinz Kienitz Doutor em Engenharia Elétrica pelo Instituto Federal de Tecnologia de Zurique – Zurique, ZH – Suíça. Professor do Instituto Tecnológico de Aeronáutica – São José dos Campos, SP – Brasil. E-mail: [email protected] Brigadeiro Engenheiro Mauricio Pazini Brandão Doutor em Engenharia Aeronáutica e Astronáutica pela Universidade de Stanford – Stanford, CA – Estados Unidos. Professor do Instituto Tecnológico de Aeronáutica – São José dos Campos, SP – Brasil. E-mail: [email protected] Resumo Neste artigo é apresentado o desenvolvimento de uma plataforma aérea multi-operacional utilizando Veículos Aéreos Não-Tripulados (VANT) para o emprego no patrulhamento tático de embarcações marítimas. Por meio de uma estação marítima portátil, contida na embarcação, é possível pilotar o VANT remotamente, capturar imagens de vídeo por intermédio de câmeras embarcadas e determinar a respectiva posição geográfica da região monitorada em tempo real. Basicamente, a estação marítima é composta por um computador dedicado, enlaces de vídeo e de dados para coletar as informações do VANT, além de softwares específicos, dentre outros dispositivos para suportar a aplicação. A arquitetura modular do Sistema VANT permite a adição de sensores complementares para a adequação do sistema à respectiva missão. Nesta contribuição, considera-se complementarmente a configuração do Sistema VANT para a utilização de equipamentos que permitam a identificação das embarcações por meio do sistema Automatic Identification System (AIS). 34 Palavras-chave Veículos Aéreos Não-Tripulados (VANT). Patrulhamento Marítimo. Sistema de Identificação Automático (AIS). Development of a Multipurpose Tactical Surveillance System by using UAV Abstract This paper describes the development of a multipurpose aerial platform using UAV for tactical surveillance of maritime vessels. By means of a portable maritime station on the vessel, UAV can be remotely operated. On board cameras can capture video images and determine the respective geographic location of the monitored area in real-time. This maritime station is basically equipped with a dedicated computer, video and data links to collect information from the UAV, besides specific softwares, among other devices for carrying out the activities. Due to its modular architecture, other sensors can be added to adequate the UAV system to a particular mission. As a contribution to it, the UAV system can be completely configured to use equipment which allows the identification of vessels through the Automatic Identification System (AIS). Keywords Unmanned Air Vehicle (UAV). Maritime Patrol. Automatic Identification System (AIS). 1. INTRODUÇÃO O Brasil é um país com dimensões continentais, o maior da América do Sul e superado apenas pela Rússia, pelo Canadá e pela República Popular da China. Seu perímetro geográfico se estende por 23086 km, sendo que 15719 km do país fazem fronteira com outros países da América do Sul e que cerca de 7370 km são banhados pelo Oceano Atlântico (IBGE, 2009). Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 34-43 Sensores, Guerra Eletrônica e Guerra Acústica Assim, o patrulhamento da costa brasileira é de especial importância, tanto do ponto de vista da segurança da nação quanto do ponto de vista da segurança das pessoas e das embarcações que navegam pela costa do Brasil. Neste contexto, a contribuição deste trabalho é o desenvolvimento de uma ferramenta que possibilite a um operador controlar o voo de um VANT sobre determinada área marítima, capturar as imagens georreferenciadas e informações de embarcações, por meio do sistema AIS e, em tempo real, enviá-las para a estação base de comando, ou estação marítima portátil, para posterior processamento e armazenagem. LCD (Helmet Mounted Display) que, por sua vez, possibilita a imersão total do piloto no sistema de navegação / monitoramento. A Figura 1 mostra protótipo do Sistema VANT. FIGURA 1 Protótipo do Sistema VANT. Este desenvolvimento considera como premissas situações meteorológicas ideais para o voo do VANT e abstém-se de discutir requisitos fundamentais do sistema. 2. DESENVOLVIMENTO 2.1. Visão geral do projeto A proposta deste trabalho é uma aplicação customizada do projeto descrito por Rangel, Kienitz e Brandão (2009), que consiste no desenvolvimento de um Sistema VANT utilizando equipamentos COTS (Commercial-Of-The-Shelf). A plataforma básica de teste foi a aeronave VANT BRV-01(Hornet H2) e a aeronave VANT BRV02 (Proton), equipadas com câmeras de vídeo, equipamentos de telemetria e de controle. O software de navegação, instalado no computador da estação base de comando, permite a visualização, em tempo real, das informações de posição da aeronave e as imagens de vídeo georreferenciadas capturadas pela câmera do VANT. Toda a interface visual entre o piloto e os equipamentos da estação base de comando pode ser representada na tela do computador e/ou em um capacete equipado com visores de Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 34-43 Para as missões de esclarecimento no mar, opcionalmente, a aeronave pode ser equipada com o Automatic Identification System (AIS), que permite monitorar a rota e identificar as embarcações que estiverem dentro do alcance do rádio VHF (Very High Frequency). Os dados capturados pelo AIS são enviados pela telemetria do VANT, em tempo real, e representados no display da estação base de comando. 2.2. O sistema AIS O AIS é um sistema de identificação automática especificado pela International Maritime Organization (IMO), de emprego obrigatório por todos os navios com arqueação bruta acima de 300 toneladas envolvidos em viagens internacionais, navios de passageiros e navios de carga com mais de 500 toneladas. Esse sistema opera na faixa da banda VHF com protocolo aberto e a sua finalidade é disseminar automaticamente informações do navio como posição GPS (Global Positioning System), rumo, velocidade, nome da embarcação, indicativo internacional 35 Rodrigo Kuntz Rangel / Cleber Almeida de Oliveira / Karl Heinz Kienitz / Mauricio Pazini Brandão etc., automaticamente, sem a interferência da tripulação, com uma taxa de envio dos dados em torno de 2 s e tornando a navegação marítima mais segura (IMO, 2009). Entretanto, este sistema possui algumas desvantagens e limitações, tais como: grande dependência do sistema GPS, possibilidade de transmissão de dados corrompidos ou incorretos e possibilidade de uso das informações AIS para pirataria marítima. Esta última desvantagem justifica o desenvolvimento de um VANT para realizar o esclarecimento marítimo, principalmente em áreas de tráfego denso e plataformas de petróleo. 2.3. Software de Navegação e Controle O principal objetivo do software de navegação e controle é fazer a integração entre os diversos equipamentos responsáveis pelo funcionamento do sistema do VANT. Além disso, mostrar de forma visual ao piloto as informações de voo da aeronave e a sua respectiva posição em relação à missão planejada. Os equipamentos incluem um hardware conectado ao computador, controlado diretamente pelo software de navegação e um arquivo de informações proveniente de software executado paralelamente com o software da navegação. O carregamento dos dados de missão é feito por meio de um arquivo. O software gerencia em tempo real a aquisição dos dados de missão e a aquisição dos dados de telemetria, realiza cálculos do posicionamento da aeronave, cálculos de navegação e controle (DORF e BISHOP, 2001), mostra os resultados dos cálculos em forma gráfica, gerencia a aquisição das imagens provenientes da aeronave, gerência a comunicação entre os módulos de missão com o módulo principal e, finalmente, monta a interface do usuário. Os módulos adicionais ao software de navegação e controle representam os softwares específicos da respectiva missão. Nesse caso, o módulo adicional fica condicionado a interpretar o catálogo de informações do AIS, a calcular a posição das embarcações a partir da estação base de comando e a montar uma interface gráfica para a representação dos resultados da missão. O software de navegação foi desenvolvido utilizando a ferramenta de programação Visual C++ 7. Basicamente, o software desenvolvido possui a arquitetura mostrada na Figura 2, onde sua concepção é baseada em módulos, ou seja, cada funcionalidade adicional ao software principal é tradada como um módulo separado. FIGURA 2 Arquitetura básica do software. è è Partindo das especificações mencionadas acima, foi desenvolvido um diagrama macro de relacionamento entre os módulos que compõem o software de navegação. A Figura 3 ilustra o diagrama de estados do software de navegação e controle do sistema. FIGURA 3 Diagrama de Estados do software de navegação e controle. Toda a navegação é gerenciada via GPS (TSUI, 2000) com o auxílio de giroscópios estabilizadores (DORF e BISHOP, 2001) e a lógica interna do software de navegação e controle. 36 Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 34-43 Sensores, Guerra Eletrônica e Guerra Acústica 2.4. Aeronave São duas as opções de protótipos de VANT utilizados neste trabalho, conforme mostrado na Figura 4, o VANT BRV-02 (Eletron) e o VANT BRV-01 (Hornet H2). Os protótipos denominados BRV-01 e BRV-02 são aeronaves totalmente portáteis, de fácil montagem e de fácil transporte, operadas por meio de um sistema de rádio controle, cuja operação pode ser de forma manual ou automática, sendo esta por intermédio de uma estação base de comando. Algumas funcionalidades automáticas e autônomas (DORF e BISHOP, 2001) estão presentes nessas aeronaves, como, por exemplo, a navegação automática por waypoints e o retorno à estação base de comando em caso de emergência. Uma segunda unidade de câmera de vídeo pode ser utilizada como equipamento adicional e, nesse caso, a câmera de vídeo é utilizada como câmera para aquisição de dados de missão. Esta, segunda câmera, possui um sistema de estabilização próprio e pode ser do tipo Infravermelho ou termal. FIGURA 4 VANTs utilizados como plataforma de testes, BRV-02 e BRV-01, respectivamente. A Tabela 1 mostra as diferentes características técnicas das aeronaves. TABELA 1 Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 34-43 37 Rodrigo Kuntz Rangel / Cleber Almeida de Oliveira / Karl Heinz Kienitz / Mauricio Pazini Brandão Características técnicas dos VANT utilizados como plataforma de testes, BRV-02 e BRV-01 são, respectivamente: 1. Desempenho e envelope de operação – A aeronave possui duas opções de motorização, sendo a primeira composta por um motor à combustão e a segunda, por motorização elétrica. A altitude típica de operação da aeronave varia entre 20 a 5.000 pés acima da superfície com a velocidade de cruzeiro de 100 km/h (motorização a combustão) e 60 km/h (motorização elétrica). Uma importante característica de voo é o envelope operacional de velocidade, situado na faixa entre 20 a 200 km/h. A aeronave pode realizar sobrevoos lentos e tem resposta rápida para altas velocidades. A escolha do tipo da aeronave fica condicionada à finalidade da missão. Por meio da geometria da aeronave e dos sistemas de estabilização dedicados, obtém-se a capacidade de auto-estabilização. Com isso, o piloto pode dar maior atenção aos comandos de navegação e de missão, em vez de se preocupar com a controlabilidade da aeronave (STINTON, 2001). A aeronave decola e pousa manualmente com o auxílio de um operador em solo/embarcado e a navegação dentro do raio de operação dos equipamentos da estação base pode ser feita de forma manual ou automática. Fora do raio operacional dos equipamentos da estação base a navegação e o controle da aeronave são realizados de forma automática. 2.Eletrônica embarcada – Basicamente, a principal missão da aeronave é manter a rota pré-estabelecida por meio da leitura dos sensores embarcados e consequentemente garantir a sua respectiva posição para servir de relay de comunicação. Para isso, o piloto eletrônico (computador de bordo) (BERGER, 2001) lê as informações de rota, previamente programadas no cartão de memória (CM) da aeronave, e as informações 38 provenientes dos sensores (GPS e IMU), a fim de fazer, ou não, eventuais correções. Com isso, fica garantido que a aeronave seguirá a rota pré-estabelecida automaticamente. Enquanto a aeronave estiver dentro do raio operacional da estação base de comando, um enlace de dados feito por meio de um rádio transmissor específico e de um segundo transmissor de vídeo, nela contido, é utilizado para enviar as informações de posicionamento e dos sensores da aeronave para a estação base de comando. Além disso, o transmissor cuida do enlace de vídeo, que é utilizado para transmitir o vídeo do voo em tempo real. Durante a fase de transição, quando a aeronave estiver saindo do limite operacional da estação base, o piloto eletrônico ativa o modo de pilotagem automática e com isso a aeronave passa a navegar de forma autônoma. Sistemas de estabilização, navegação e controle específicos são utilizados para a estabilização, navegação e controle da aeronave em voo. Para a aplicação de monitoramento tático, condicionado somente à inspeção visual das embarcações e respectivas posições geográficas, não há a necessidade do embarque de transceptor do sistema AIS. Os equipamentos embarcados podem ser observados no diagrama representado pela Figura 5. FIGURA 5 Eletrônica embarcada. Eletrônica embarcada. Entretanto, devido às condições climáticas desfavoráveis à inspeção visual e caso a aplicação Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 34-43 Sensores, Guerra Eletrônica e Guerra Acústica necessite de informações provenientes do sistema AIS, é possível o embarque do transceptor. O transceptor AIS recebe as informações das embarcações mais próximas, codifica-as e envia ao servidor aeronáutico para posterior transmissão à estação base de comando. Para a configuração e o controle automático do sistema AIS (Figura 6) é utilizado um servidor aeronáutico, conectado por meio de um barramento de dados, contendo um software de computador específico, de arquitetura modular, denominado de software de comunicação e controle AIS (SCC-AIS). O SCC-AIS tem a principal função de efetuar as configurações no transponder AIS, de interfacear o sistema AIS ao sistema aviônico do VANT, de controlar o mecanismo de transmissão (TX) e recepção (RX) dentre outras funcionalidades pré-definidas durante o planejamento e execução da missão. A transmissão dos dados AIS é feita utilizando o mesmo enlace de dados de telemetria da aeronave. A Figura 6 mostra o diagrama básico de funcionamento do sistema AIS. 2.5. Estação base de comando Para suportar a missão de monitoramento tático utilizando um VANT, a estação base de comando (Estação marítima portátil) é um componente de extrema relevância, pois é responsável pela aquisição de todas as informações captadas pela aeronave, conforme as funcionalidades descritas nos próximos parágrafos, além de garantir a decolagem e o pouso da aeronave, que é feita de forma manual. A estação base de comando possui a sua concepção de forma modular e portátil, o que facilita o seu transporte e agilidade operacional em campo, embarcado em um navio ou interligado a um sistema de controle fixo, que pode estar no solo, no mar ou no ar. Por intermédio da estação base de comando é possível controlar remotamente o VANT. Softwares específicos contidos no laptop da estação base possibilitam a criação de missões específicas, upload e download de dados da aeronave, a utilização de controles de voo (joysticks) e a interface com software de Moving-map / Visão Sintética. Eles também permitem um completo sistema de FIGURA 6 Eletrônica embarcada com o sistema AIS. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 34-43 39 Rodrigo Kuntz Rangel / Cleber Almeida de Oliveira / Karl Heinz Kienitz / Mauricio Pazini Brandão navegação via waypoints e uma interface visual e sonora contendo instruções de navegação de fácil compreensão, similar aos atuais sistemas de HeadUp-Display (HUD) e sistemas aviônicos utilizados nos mais modernos aviões da atualidade (Rangel, Guimarães e Brandão, 2007). Por meio de um capacete específico, equipado com um conjunto de visores com tecnologia LCD, alto-falantes, equipamento giroscópio, juntamente com a interface gráfica do HUD e alarmes sonoros provenientes do software de navegação, é possível a total integração entre o piloto e a aeronave. Imagens e sinais de áudio do voo são captados, processados em tempo real e mostrados ao piloto de forma visual e sonora. Com isso, cria-se um cockpit virtual para a pilotagem remota do VANT, possibilitando a total imersão do piloto no cockpit virtual do veículo (RANGEL, KIENITZ e BRANDÃO, 2009). Em tempo real, é possível gravar os dados do voo e da missão (vídeo e dados de voo). Existe também a possibilidade de conectividade a outras estações de comando ou módulos adicionais, customizados para a respectiva missão, por meio de redes LAN, WLAN e Internet. Adicionalmente, por intermédio da conectividade entre a estação base de comando e o sistema AIS, é possível o monitoramento em tempo real e obtenção das informações das embarcações presentes na região monitorada. Essas informações são representadas na estação base por meio de um dispositivo gráfico, de forma visual e contendo todas as informações coletadas das embarcações monitoradas. O limite operacional, em termos de controle da aeronave, na forma manual, dependerá do alcance do rádio controle. Em aplicações em que exista a necessidade de um controle manual de forma estendida, há provisões sistêmicas para utilização de equipamentos de comunicação via satélite. Na Figura 7, o item A mostra o diagrama básico de funcionamento da estação de solo (Inspeção visual) e o item B mostra o diagrama básico de funcionamento da estação de solo com o sistema AIS. 3. FUNCIONAMENTO DO SISTEMA Para demonstrar a possibilidade de utilização de Veículos Aéreos Não-Tripulados em missões de Patrulhamento Marítimo com a possibilidade de utilização do sistema AIS, foi criado um cenário tático fictício respeitando os limites operacionais dos equipamentos de comunicação. Neste cenário, as distâncias estabelecidas como sendo os alcances máximos de comunicação não representam as respectivas operacionalidades de um cenário real, no que diz respeito ao alcance máximo operacional. A aplicação proposta tem duas finalidades, sendo a primeira o patrulhamento de embarcações marítimas, plataformas de petróleo e regiões pré-definidas, condicionado somente à FIGURA 7 Diagrama básico de funcionamento da estação de solo (A) e Diagrama básico de funcionamento da estação de solo com o sistema AIS (B), 40 Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 34-43 Sensores, Guerra Eletrônica e Guerra Acústica inspeção visual. A segunda finalidade, além do patrulhamento condicionado à inspeção visual, é a utilização do sistema AIS para a obtenção de informações sobre as embarcações marítimas presentes na região patrulhada. Quando em operação, o VANT envia à estação base os dados de navegação e as imagens georreferenciadas do voo. As informações são recebidas pela estação base e, posteriormente, são representadas de forma gráfica numa espécie de MFCD (Multi-Function Color Display) contido no rack de missão da estação base de controle (Estação marítima). Caso o sistema VANT esteja equipado com os equipamentos AIS, incluemse os dados das embarcações coletados pelo transceptor. O nível de voo do VANT pode aumentar o alcance operacional do sistema AIS e, consequentemente, servir de relay de comunicações dos dados. A Figura 8 mostra a disposição tática e operacional das embarcações marítimas e do VANT, e a Figura 9 mostra o resultado obtido atpor meio de simulações do sistema VANT com o módulo adicional AIS. FIGURA 8 Disposição tática e operacional das aeronaves com os respectivos rádios. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 34-43 FIGURA 9 Resultado simulado do sistema VANT com o módulo adicional AIS, tela da estação base de comando. Basicamente, o VANT decola de forma manual, entra em cruzeiro e pousa manualmente. As funções e navegação automáticas são acionadas quando o VANT está voando em cruzeiro, que consiste em voar até o ponto de patrulhamento, mantendo a rota pré-definida, orbitar a região pelo período determinado, se necessário, e retornar à base de operações. Após o planejamento da missão, a próxima etapa é a preparação para o voo do VANT. Para isso, todos os sistemas embarcados na aeronave partem de um ponto em comum, ou seja, da rota estabelecida e gravada em um cartão de memória acoplado no piloto eletrônico. por meio de um software capaz de fazer o planejamento da rota e gravação no cartão de memória, a rota da missão é definida, gravada e carregada no piloto eletrônico (LITZENBERGER, 2007), que, por sua vez, é responsável por toda a navegação automática da aeronave. Posteriormente ao planejamento da missão e inserção dos dados na aeronave, a rota estabelecida por altitude, latitude e longitude é carregada no software de navegação e controle da estação base de comando, a fim de se obter um sistema secundário de backup. O GPS 41 Rodrigo Kuntz Rangel / Cleber Almeida de Oliveira / Karl Heinz Kienitz / Mauricio Pazini Brandão é conectado ao piloto eletrônico, onde são lidas e codificadas as informações provenientes da aeronave em relação à sua rota pré-estabelecida. O vídeo do voo é transmitido em tempo real para a estação do solo apir meio de um vídeo-enlace conjunto com o enlace de telemetria, feito por um sistema de telemetria dedicado. As transmissões de telemetria e vídeo-enlace ficam limitadas ao raio operacional dos respectivos componentes de radiofrequência. Quando a missão é iniciada, o piloto manualmente decola a aeronave e numa altitude pré-definida aciona o modo automático e, então, o piloto eletrônico assume o comando da aeronave. Durante a etapa de decolagem e a de pouso, a estação base recebe em tempo real as imagens da câmera de vídeo e os dados de telemetria referentes ao estado dos sensores embarcados na aeronave, assim como a posição da aeronave em relação à rota pré-definida (TSUI, 2000), a identificação e dados de navegação das embarcações contidas no raio operacional do sistema VANT. Todas essas informações são interpretadas e unificadas num software específico, denominado software de navegação e controle da estação base de comando. Após a conclusão da missão, a aeronave inicia o processo de aproximação para pouso. Nessa etapa, a estação de base é avisada para que o piloto humano assuma o controle da aeronave. Quando este assume o controle da aeronave, o piloto eletrônico é desligado e a aeronave faz o pouso manualmente. As informações obtidas durante o voo, os dados de navegação da aeronave assim como as imagens e dados das embarcações, são armazenadas na estação de comando criando assim uma base de dados para consultas futuras. Um fator que deve ser considerado é a adequação dos sistemas de VANT às condições climáticas e operacionais marítimas, pois os sistemas embarcados tanto no VANT quanto os sistemas que compõe a estação base, devem seguir normas de qualificação para que não fiquem suscetíveis a problemas acarretados pela maresia, água salgada e etc. Utilizando um Veículo Aéreo Não-Tripulado, é possível a instalação de um Sistema de Identificação Automática (AIS) embarcado que possibilite além do patrulhamento condicionado à inspeção visual, a obtenção de informações sobre qualquer tipo e classificação das embarcações marítimas presentes na região patrulhada, sendo através da inspeção visual ou pelo sistema AIS. Com a variação do nível de voo do VANT é possível aumentar o alcance operacional do sistema AIS e consequentemente servir de relay de comunicações e de dados. Por possuir uma estação de comando portátil, é possível o controle do VANT e o monitoramento da missão através de embarcações marítimas, plataformas de petróleo e até mesmo de aeronaves tripuladas. Com a utilização de outros tipos de rádios e sensores, como, por exemplo, câmeras infravermelho ou termais, é possível a adequação da aplicação à necessidade operacional, pois a plataforma móvel, o VANT, pode ser adaptado segundo a necessidade da aplicação. Dessa forma, pretende-se aprofundar o estudo em questão para a disponibilização desse tipo de equipamento, que poderá auxiliar as Forças Armadas Brasileiras no patrulhamento costeiro, sendo mais um equipamento tecnológico trabalhando para a manutenção da soberania nacional. 4. CONSIDERAÇÕES FINAIS Durante o presente trabalho foi mostrado que há a possibilidade de desenvolvimento de um sistema de patrulhamento tático por meio aéreo, que não necessite de superioridade aérea. 42 Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 34-43 Sensores, Guerra Eletrônica e Guerra Acústica REFERÊNCIAS BERGER, A. Embedded Systems Design: An Introduction to Processes, Tools, and Techniques. CMP Books, EUA. 1a edição, 2001. DORF, R.; BISHOP, R. Sistema de Controle Moderno. LTC, Rio de Janeiro, Brasil. 8a edição, 2001. IBGE, 2009: http://www.ibge.gov.br/ibgeteen/pesquisas/geo/ posicaoextensao.html, último acesso em 10 de outubro de 2009. IMO, 2009: http://www.imo.org.br, último acesso em 09 de outubro de 2009. RANGEL, R. K.; KIENITZ, K. H. e BRANDÃO, M. P. Development of a Complete UAV System Using COTS Equipment. IEEE Aerospace Conference, Montana, EUA. RANGEL, R. K.; GUIMARAES, L. N. F. e BRANDÃO, M. P. Development of an UAV Navigation System through Synthetic Vision. Congresso SAE Brasil, São Paulo, Brasil. 2007. STINTON, D. The Design of the Aeroplane. Blackwell Science, UK. 2a edição, 2001. TSUI, J. Fundamentals of Global Positioning System Receivers: A Software Approach. John Wiley & Sons, EUA. 1a edição, 2000. LITZENBERGER, G. World Robotics.World Robotics Press Conferece, Germany. Revista Pesquisa Naval, Brasília, n. 23, 2010, p. 34-43 43 Materiais Especiais Síntese e Avaliação da Ação Algicida de Lyso-glicerofosfocolinas Capitão-de-Corveta (EN) William Romão Batista Mestre em Química Analítica pela Universidade Federal do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. Militar pesquisador do Instituto de Estudos do Mar Almirante Paulo Moreira – Arraial do Cabo, RJ – Brasil. E-mail: [email protected] Vanessa de Almeida Martins Mestre em Química Analítica pela Universidade Federal do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. Cursando o Doutorado pela Universidade Federal do Rio de Janeiro, Instituto de Química – Rio de Janeiro, RJ – Brasil. E-mail: [email protected] Maria Helena Campos Baeta Neves Doutora em Oceanografia Biológica Algologia pela Université Pierre et Marie Curie – Paris – França. Pesquisadora do Instituto de Estudos do Mar Almirante Paulo Moreira – Arraial do Cabo, RJ – Brasil. E-mail: [email protected] Ricardo Coutinho Doutor em Biologia pela University Of South Carolina – Columbia, SC – Estados Unidos. Pesquisador do Instituto de Estudos do Mar Almirante Paulo Moreira – Arraial do Cabo, RJ – Brasil. E-mail: [email protected] Rosangela Sabbatini Capella Lopes Doutora em Química Orgânica pela Universidade Federal do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. Professora da Universidade Federal do Rio de Janeiro, Instituto de Química – Rio de Janeiro, RJ – Brasil. E-mail: [email protected] Cláudio Cerqueira Lopes Doutor em Química pela Universidade Federal do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. Professor da Universidade Federal do Rio de Janeiro, Instituto de Química – Rio de Janeiro, RJ – Brasil. E-mail: [email protected] Resumo Este trabalho apresenta uma proposta de síntese e de uso, como biocida anti-incrustante marinho, de lyso-glicerofosfocolinas especiais. Lecitina de soja foi utilizada como matéria-prima de síntese. Na avaliação da ação biocida contra o crescimento microbiológico foram utilizadas três espécies de microalgas representativas dos principais grupos de organismos formadores do biofilme marinho: Tetraselmis striata; Dunaliella tertiolecta e Skeletonema costatum. A síntese empregada produziu uma mistura de diferentes lyso-glicerofosfocolinas, que foram identificadas pelo uso de técnicas de espectrometria de massas. A ação anti-incrustante do produto de síntese foi avaliada por comparação àquela conseguida com o uso de sulfato de cobre, uma das formas de cobre usado em tintas anti-incrustantes. Os resultados alcançados demonstram que o uso de lyso-glicerofosfocolinas pode 44 ser uma boa opção biocida para o preparo de tintas antiincrustantes de uso naval. Palavras-chave Síntese. Lyso-glicerofosfocolinas. Biocida. Microalgas. Anti-incrustante. Synthesis and Evaluation of the Algaecide Action of Lyso-glycerophosphocolines Abstract This paper presents a proposal for synthesis and use, as an antifouling marine biocide, of special lysoglycerophosphocolines. Soy lecithin was used as raw material for synthesis. In the evaluation of biocide action, against microbial growth, – three micro algae species representing the main groups of marine organisms that form the biofilm were used: Tetraselmis striata; Dunaliella tertiolecta and Skeletonema costatum. The synthesis used produced a mixture of different lysoglycerophosphocolines, which were identified by the use of mass spectrometry techniques. The antifouling action of the synthesis product was assessed by comparinglaboratory tests to the effects achieved – by using – sulphate copper, a kind of copper used in antifouling paints. The results – achieved show- that the use of lysoglycerophosphocolines can be an interesting biocide option for -preparing -antifouling paints for – naval use. Keywords Synthesis. Lyso-glycerophosphocoline. Biocide. Micro algae. Antifouling. 1. INTRODUÇÃO Notório é o fato de a bioincrustação marinha ocasionar problemas logísticos e prejuízos econômicos, entre os quais podemos citar: entupimentos, comprometimentos estruturais e, na navegação, diminuição da velocidade, perda de manobrabilidade e aumento de consumo de combustível (YEBRA, 2004; EGUFA e TRUEBA, 2007; MARECHAL e HELLIO, 2009; RAVEENDRAN e MOL 2010; CASTRO et al. 2011; DAFFORN et al., 2011). Ela é o resultado do processo natural de colonização e crescimento de micro e macroRevista Pesquisa Naval, Brasília, n. 24, 2011, p. 44-53 Materiais Especiais -organismos sobre superfícies submersas. O seu desenvolvimento envolve diferentes etapas e se inicia com a adsorção, àquela superfície, de moléculas orgânicas disponíveis na coluna d’água, tais como polissacarídeos e proteínas, o que permite uma subsequente adesão de micro-organismos como bactérias, cianobactérias, diatomáceas e protozoários, caracterizando-se este estágio pela formação do biofilme e é, este biofilme, o agente facilitador do assentamento e do desenvolvimento de macro-organismos, tais como moluscos, briozoários, poliquetas, balanídeos, crustáceos e algas (BHADURY e WRIGHT, 2004; YEBRA et al., 2004; CALLOW e CALLOW, 2006). Muitos estudos têm demonstrado que a adesão inicial de bactérias a uma superfície submersa é uma das prováveis chaves tanto para se entender o processo da bioincrustação quanto para se entender que a formação do biofilme é o mecanismo precursor da incrustação por organismos macroincrustantes (ARCE et al., 2004; BHASKAR e BHOSLE, 2005; BRIAND, 2010; XIONG e LIU, 2010). Dentro desta abordagem, espécies de microalgas marinhas são consideradas como importantes organismos incrustantes, destacando-se as Clorofíceas, Heteroconta (principalmente Diatomáceas) e Rodofíceas, sendo também as cianobactérias frequentemente tidas como colonizadores primários. O objetivo deste trabalho foi avaliar, por meio de ensaios laboratoriais, a ação anti-incrustante, contra microalgas, de um produto de síntese laboratorial composto por uma mistura de lyso-glicerofosfocolinas (LPC) análogos à substância conhecida como Fator Ativador de Plaquetas (PAF). Acredita-se que tais lyso-glicerofosfocolinas se difundido no biofilme, possa agir ocasionando o rompimento ou mau funcionamento da membrana citoplasmática das células dos organismos que iniciam e formam o biofilme, ocasionando assim a sua repulsão ou morte, implicando isto, consequentemente, na inibição ou mitigação do início do processo de bioincrustação. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 44-53 2. METODOLOGIA DE PESQUISA 2.1. Hipóteses de ação A ideia da utilização de LPC como agente anti-incrustante tem por princípio o efeito produzido em outros tipos de células testadas na área médica e farmacológica, tendo por hipótese o desencadeamento de uma reação antagônica ou processo degenerativo nas células dos organismos incrustantes em contato com tais substâncias PAF (VENABLE et al. 1993; BOTITSI et al., 1998; KULIKOV e MUZYA, 1998; MARATHE et al., 2001). Para se entender os mecanismos envolvidos na liberação e na ação de um biocida contido em uma tinta ou outro substrato qualquer, supõem-se, aqui, que ocorram as seguintes etapas: 1ª) o LPC, utilizado como biocida, é liberado do substrato e atinge a parte inferior do biofilme; 2ª) o LPC começa a sua difusão pelo interior do biofilme, tendo como principal eluente a água do mar e como superfície de interação o biofilme (adsorção e dessorção); 3ª) o LPC atinge os invólucros mais externos dos micro-organismos que compõem o biofilme, sendo iniciada a sua absorção; 4ª) o LPC atinge a membrana plasmática e ocasiona a repulsão ou morte do micro-organismo e 5ª) o LPC que ultrapassa a camada do biofilme entra na camada hidrodinâmica e passa a sofrer a dispersão e a diluição pela água do mar (Figura 1). Assim, um aspecto entendido como de fundamental importância refere-se às interações interfaciais desenvolvidas entre o LPC, a água do mar e os exopolissacarídeos exsudados (EPS) constituintes do biofilme. Entende-se aqui que o LPC não pode ser totalmente solúvel em água e nem ter alta afinidade pelo EPS. Sendo ele totalmente solúvel, tenderá a permanecer na fase aquosa e, devido ao maior coeficiente de difusibilidade neste meio, será completamente retirado do biofilme, perdendo-se no ambiente aquoso. Se tiver ele alta afinidade pelo EPS, a sua difusão tornar-se-á muito lenta e menos abrangente, comprometendo o seu contato com os microorganismos, fican45 William Romão Batista / Vanessa de Almeida Martins / Maria Helena Campos Baeta Neves / Ricardo Coutinho / Rosangela Sabbatini Capella Lopes / Cláudio Cerqueira Lopes do assim restrito à parte mais inferior do biofilme contíguo à camada de tinta e, como consequência, terá baixa eficiência (GOREISCH et al., 2004; IWASAKI e ISHIHARA, 2005; YEBRA et al., 2006; WATANABE e ISHIHARA, 2008). 3.1. Produtos químicos Vale registrar que EPS – excetuando-se a água – é o principal componente do biofilme. Formado por uma complexa mistura de macromoléculas tais como polissacarídeos, proteínas, lipídios e ácidos nucléicos, sendo sua composição variável com a espécie de micro-organismo e fatores ambientes envolvidos. 3.2. Ensaios laboratoriais 3. MATERIAIS E MÉTODOS Ácido fórmico ACS (Sigma Aldrich); Sulfato de cobre PA (Vetec); metanol LC-MS (Tedia); diclorometano GC (Tedia); água grau-1 (Milli-Q); lecitina de soja (Akros) e Sódio metálico (Vetec). A atividade biocida do produto de síntese foi comparada àquela obtida pelo uso do sulfato de FIGURA 1 Ilustração da difusão hipotética do biocida (LPC). O biocida componente da tinta é carreado pela água do mar a partir de poros formados por desgaste (concentração máxima – C máx) e se difunde pelo biofilme entrando em contato com os micro-organismos. Ao ultrapassar a camada do biofilme ele passa a ser diluído, pela ação da água do mar, na camada limite hidrodinâmica. Alcançando sua diluição total (C → 0) na região mais exterior. Fonte: adaptado de Yebra et al. 2006. 46 Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 44-53 Materiais Especiais cobre (CuSO4), uma das formas de cobre usadas como biocida em tintas anti-incrustantes, contra o crescimento de microalgas representativas dos maiores grupos de organismos formadores do biofilme. Foram utilizadas uma espécie de prasinofícea (Tetraselmis striata), uma de clorofícea (Dunaliella tertiolecta) e uma de diatomácea (Skeletonema costatum) fornecidas pelo Laboratório de Microalgas do Instituto de Estudos do Mar Almirante Paulo Moreira (IEAPM). Para os ensaios, realizados em triplicata, 5x105 cel.ml-1 de cada espécie de microalgas em fase de crescimento exponencial foram colocados em tubos de ensaio contendo 15 ml de meio de cultura Conway e em seguida inoculadas com as soluções de CuSO4 e do produto de síntese, as quais, ao final, ficaram com concentrações de 3,3 µg.ml-1 e 3,0µg.ml-1 respectivamente. Os tubos contendo as microalgas foram colocados em uma incubadora a 18 ºC com ciclo de fotoperíodo de 12h luz e 12h escuro, sendo avaliados diariamente quanto ao crescimento celular, durante cinco dias, por meio da contagem direta das células em um Hematocitômetro de Neubauer. 4. SÍNTESE DAS LYSO-GLICEROFOSFOCOLINAS A síntese de glicerofosfolipídios não é uma tarefa trivial, pois requer uma incorporação regiosseletiva de três diferentes substituintes nas três posições possíveis da molécula de glicerol, o que envolve sequências de proteção e desproteção de suas hidroxilas e sequências de alquilação ou acilação e fosforilação, podendo para este intento utilizar-se de procedimentos catalíticos e enzimáticos (TESTET et al., 2002; ICHIHARA et al., 2005; D’ARRIGO et al., 2007). Para este trabalho, foi desenvolvida, pelo Laboratório de Síntese e Avaliação de Produtos Estratégicos (LASAPE), uma síntese a partir das lecitinas de soja (Figura 2), visando o preparo de LPC do tipo 1-hidroxi-2-O-acil-sn-glicero-3-fosfocolina, substâncias estas com estruturas químicas seme- FIGURA 2 Síntese de Lyso-GPC a partir de lecitina de soja por metanólise. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 44-53 47 William Romão Batista / Vanessa de Almeida Martins / Maria Helena Campos Baeta Neves / Ricardo Coutinho / Rosangela Sabbatini Capella Lopes / Cláudio Cerqueira Lopes lhantes aos compostos 1-O-hexadecil-2-O-acetil-sn-glicero-3-fosfocolina (PAF) e 1-O-hexadecil-sn-glicero-3-fosfocolina (Lyso-PAF). A síntese foi realizada em um reator de vidro equipado com um condensador de refluxo com água fria, sendo as lecitinas tratadas com uma solução de metóxido de sódio em metanol preparada in situ durante um longo período de agitação mecânica e sob aquecimento. A batelada foi realizada usando-se 1000 mL de metanol, 3.0 gramas de sódio metálico e 40.0 gramas de lecitinas de soja. A mistura reacional foi deixada sob forte agitação durante 72 horas sob aquecimento de 45-60 ºC, sendo o resíduo sólido filtrado por gravidade em papel de filtro. Após a remoção das substâncias voláteis foi obtido em 33,4 gramas de produto sólido. As lecitinas de soja empregadas neste projeto foram caracterizadas estruturalmente por meio da espectrometria de massas usando um sistema de cromatografia líquida de alta performance (HPLC) Shimadzu Prominence acoplada a um analisador de massas tipo iontrap da Bruker Esquire 6000 e apresentaram a composição mostrada no Quadro 1. 5. ANÁLISE QUÍMICA QUALITATIVA O produto de síntese, previamente dissolvido em uma mistura de metanol, clorofórmio e água (2/1/1) e acidulado com ácido fórmico, foi injetado manualmente no cromatógrafo a líquido (injetor Rheodyne alça de 20 μl) sob as seguintes condições operacionais: coluna cromatográfica tipo C18 marca Thermo (5 μm), 250x2 mm; fase móvel isopropanol, água, metanol e acetato de etila com um gradiente começando com (40/15/40/05), mantido por 10 minutos a uma vazão de para 0.1 ml/min, passando a (25/05/50/20) aos 15 minutos a uma vazão de 0.3 ml/min sendo mantido até tempo final de 30 minutos. A linha de efluentes foi direcionada para um espectrômetro de massa do tipo iontrap equipado com um eletronebulizador ortogonal e trabalhando sob as seguintes condições operacionais: modo positivo, scan 400-950 m/z; agulha capilar a -4.0 KV; fluxo de gás nitrogênio 10 (l/min); temperatura de secagem de 300ºC e nebulizador a 30 (psi); Hélio usado como gás de amortecimento do trap; alto vácuo de 1x10-5 (mbar); trap drive 59.1; lente 1 (–5V); lente 2 a (–60V); saída do capilar a 132,3 (V); skimmer 40 (V); octopolo 1 DC a 12 (V); octopolo 2 DC a 1,7 (V) e octopolo RF 194.5 (V). QUADRO 1 Composição das lecitinas de soja usadas como matéria-prima. 48 Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 44-53 Materiais Especiais 6. RESULTADOS E DISCUSSÃO A análise por espectrometria de massa da corrente eluindo do HPLC produziu o cromatograma de íons totais apresentado na Figura 3. síveis estruturas químicas (PULFER e MURPHY, 2003; PETERSON e CUMMINGS, 2006; HSU e TURK, 2009; KHALIL et al., 2010). Foi realizada uma avaliação dos íons componentes eluindo nos tempos 4.9; 10.1(espectro não apresentado); 11.7 e 13.2 min, inerentes aos principais picos observados (Figuras 4 a 6). As fragmentações tipo MS2 dos íons m/z 539; 523; 615; 597 e 599, mostrados nas Figuras 4 a 6, produziram, exceto para o íon precursor m/z 539, o íon característico m/z 184, confirmando se tratarem de glicerofosfocolinas produzida na síntese. Entende-se aqui que as condições experimentais usadas na análise proporcionaram uma boa distribuição e separação dos lipídios hidroxilados, nos 13 minutos iniciais, daqueles mais ramificados e/ ou não reagidos, como é o caso de uma glicerofosfocolina m/z 736 observada nos, aproximadamente, 15 minutos. Do acima exposto, considera-se aqui que os principais produtos obtidos pela síntese foram os íons m/z 523, m/z 599 e m/z 597 (figura 7), sendo a presença dos íons m/z 734 e 736, os quais são tidos como resíduo da matéria prima empregada, a lecitina de soja, uma indicação de que houve uma baixa conversão alcançada pela síntese. Para cada espectro obtido, os íons mais intensos foram isolados e avaliados usando espectrometria do tipo MS2 (espectros não apresentados) para confirmação do fragmento característico m/z 184, específico para fosfocolinas, sendo tais íons precursores estudados e avaliados quanto as pos- Em relação à inibição do crescimento celular, verificou-se, conforme mostrado na Figura 8, que a solução contendo o produto de síntese apresentou uma inibição superior àquela produzida pela do CuSO4, nos seguintes percentuais: 60,88% sobre o crescimento da Diatomácea Skeletonema FIGURA 3 Cromatograma de íons (TIC) totais obtido do efluente do HPLC. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 44-53 49 William Romão Batista / Vanessa de Almeida Martins / Maria Helena Campos Baeta Neves / Ricardo Coutinho / Rosangela Sabbatini Capella Lopes / Cláudio Cerqueira Lopes FIGURA 4 Espectro de massas dos íons eluindo aos 4.9 minutos de corrida. FIGURA 5 Espectro de massas dos íons obtidos do eluente do HPLC aos 11.7 minutos de corrida. Íon 597 m/z confirmado quanto ao fragmento característico. FIGURA 6 Espectro de massas dos íons obtidos do eluente do HPLC aos 13.2 minutos de corrida. Íon 599 m/z confirmado quanto ao fragmento característico. 50 Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 44-53 Materiais Especiais FIGURA 7 Proposta de fragmentação para íon precursor m/z 615, gerando os íons m/z 599, 597 e 581. FIGURA 8 Efeitos inibidores das soluções, Padrão de controle CuSO4 (P), Produto de síntese (S) e Branco de reagentes (B), sobre o crescimento celular das microalgas marinhas Tetraselmis striata (Ts); Dunaliella tertiolecta (Dt) e Skeletonema costatum (Sc). Contagem realizada diariamente, após inoculação das soluções, por um período total de cinco dias. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 44-53 51 William Romão Batista / Vanessa de Almeida Martins / Maria Helena Campos Baeta Neves / Ricardo Coutinho / Rosangela Sabbatini Capella Lopes / Cláudio Cerqueira Lopes costatum; 32% sobre a Prasinofícea Tetraselmis striata e 0,46% sobre a Clorofícea Dunaliella tertiolecta, demonstrando assim, que o produto de síntese exibe bom nível de atividade algicida. Outro aspecto também observado refere-se à tolerância ao CuSO4, concordando com o obtido por Claire et al. (2002), pela Skeletonema costatum, o que ratifica que métodos usuais do controle da bioincrustação com o uso de tintas anti-incrustante contendo cobre, não é de todo efetivo sobre o biofilme formado por algas diatomáceas. 7. CONCLUSÃO A utilização de lyso-glicerofosfocolinas como agente anti-incrustante apresenta-se como uma promissora perspectiva considerando sua fácil síntese e bom desempenho algicida comparada ao CuSO4. Torna-se especialmente importante ressaltar a sua atividade anti-incrustante contra o crescimento de espécies de diatomáceas, grupo representativo dos principais micro-organismos formadores do biofilme. Entende-se aqui que o seu uso possa ser de fato relevante ao considerar-se uma possível substituição de aditivos biocidas hoje utilizados em tintas marítimas anti-incrustantes. 8. AGRADECIMENTOS Registrem-se os nossos agradecimentos ao Instituto de Estudos do Mar Almirante Paulo Moreira – IEAPM –; à Marinha do Brasil (MB); ao Laboratório de Síntese e Análise de Produtos Estratégicos – LASAPE –; à Universidade federal do Rio de Janeiro – UFRJ – e à Fundação de Estudos do Mar – FEMAR –. REFERÊNCIAS: 1. ARCE, F. T.; AVCI, R.; BEECH, IB, COOKSEY KE, COOKSEY BW. A live bioprobe for studying diatom-surface interactions. Biophysical Journal, v. 87, p. 4284 – 4297. 2004. 2. BHADURY, P.; WRIGHT, P. C. Exploitation of marine algae: biogenic compounds for potential antifouling applications. Planta, v. 219, p. 561 – 578. 2004. 3. BHASKAR, P. V.; BHOSLE, N. B. Microbial extracellular polymeric substance in marine biogeochemical process. Current Science, v. 88, p. 45 – 53. 2005. 4. BOTITSI, E.; MAVRI-VAVAYANNI, M.; SIAFAKA-KAPADAI, A. Metabolic fate of platelet-activating factor (PAF 1-O-alkyl-2-acetylsn-glycero-3-phosphocholine) and lysoPAF (1-O-alkyl-2-lysosn-glycero-3-phosphocholine) in FRTL5 cells. Journal of Lipid Research, v. 39, p. 1295 – 1304. 1998. 5. BRIAND, J. F. Marine antifouling laboratory bioassays: an overview of their diversity. Biofouling 25, p. 297 — 311. 2010. 6. CALLOW, M. E.; CALLOW, J. A. Biofilms. In Fusetani and Clare (org.) Progress in molecular and subcellular biology. Subseries Marine Molecular Biotechnology. Antifouling conpounds. Springer Verlag Berlin 2006, p. 141-169. 2006. 7. CASTRO, I. B.; WESTPHAL, E.; FILLMANN, G. Tintas anti-incrustantes de terceira geração: novos biocidas no ambiente aquático. Química Nova, v.34, p. 1021-1031. 2011 8. DAFFORN, K.A.; LEWIS, J.A.; JOHNSTON, E.L. Antifouling strategies: History and regulation, ecological impacts and mitigation. Marine Pollution Bulletin, v. 62, p. 453-465. 2011. 9. D’ARRIGO, P.; FASOLI, E.; FANTONI, G. P.; ROSSI, C.; SARACENO, C.; TESSARO, D.; SERVI, S. A practical selective synthesis of mixed short/long chains glycerophosphocholines. Chemistry and Physics of Lipids, v. 147, p. 113-118. 2007. 10.EGUFA, E.; TRUEBA, A. Application of marine biotechnology in the production of natural biocides for testing on environmentally innocuous antifouling coatings. Journal of Coating Technology Research, v. 4, p. 191-202. 2007. 11.GOREISH, H. H.; LEWIS, A. L.; ROSE, S.; LLOYD, A. W. The effect of phosphorylcholine-coated materials on the inflammatory response and fibrous capsule formation: In vitro and in vivo observations. Journal of Biomedical Material Research, v.68A, p. 1–9. 2004. 52 Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 44-53 Materiais Especiais 12.HELLIO, C.; BERGE, J. P.; BEAUPOIL, C.; LEGAL, Y.; BOURGOUGNON, N. Screening of marine algal extracts for anti-settlement activities against microalgae and macroalgae. Biofouling, v.18, p. 205 – 215. 2002. 13.HSU, F. F.; TURK, J. Electrospray ionization with lowenergy collisionally activated dissociation tandem mass spectrometry of glycerophospholipids: Mechanisms of fragmentation and structural characterization. Journal of Chromatography B, v. 877, p. 2673–2695. 2009. 14.ICHIHARA, K.; IWASAKI, H.; UEDA, K.; TAKIZAWA, R.; NAITO, H.; TOMOSUGI, M. Synthesis of phosphatidylcholine: An improved method without using the cadmium chloride complex of sn-glycero-3-phosphocholine. Chemistry and Physics of Lipids, v.137, p. 94–99. 2005. 15.IWASAKI, Y.; ISHIHARA, K. Phosphorylcholine-containing polymers for biomedical applications. Analytical Bioanalytical Chemistry, v. 381, p. 534–546. 2005. 21.PULFER, M.; MURPHY, R. C. Electrospray mass spectrometry of phospholipids. Mass Spectrometry Reviews, v. 22, p. 332-364. 2003. 22.RAVEENDRAN, T. V.; MOL, V. P. L. Natural product antifoulants. Current Science, v. 97, p. 508-520. 2009. 23.TESTET, E. ; AKERMOUN, M. ; SHIMOJI, M. ; CASSAGNE, C.; BESSOULE, J. J. Nonenzymatic synthesis of glycerolipids catalyzed by imidazole. Journal of Lipid Research, v. 43, p. 1150-1154. 2002. 24.VENABLE, M .E.; ZIMMERMAN, G. A.; MCINTYRE, T. M.; PRESCOTT, S. M. Platelet-activating factor: a phospholipid autacoid with diverse actions. Journal of Lipid Research, v. 34, p. 691-702. 1993. 25.X IONG, Y.; LIU, Y. Biological control of microbial attachment: a promising alternative for mitigating membrane biofouling. Applied Microbiology Biotechnology, v. 86, p. 825-837. 2010. 16.KHALIL, M. B.; HOU, W.; ZHOU, H.; ELISMA, F.; SWAYNE, L. A.; BLANCHARD, A. P.; Yao, Z.; BENNETT, S. A. L.; FIGEYS, D. Lipidomics era: accomplishments and challenges. Mass Spectrometry Reviews, v.29, p. 877– 929. 2010. 26.WATANABE, J.; ISHIHARA, K. Establishing ultimate biointerfaces covered with phosphorylcholine groups. Colloids and Surfaces B: Biointerfaces, v. 65, p. 155–165. 2008. 17.KULIKOV, V. I.; MUZYA, G. I. Review: The bioregulatory role of platlet-activating factor in intracellualar process and cell-cell interaction. Biochemistry Moscow, v. 63 (1), p. 47 – 54. 1998. 27.YEBRA, D. M.; KIIL, S.; JOHANSEN, K. D. Antifouling technology – past present and future steps towards efficient and environmental friendly antifouling coating. Progress in Organic Coatings, v. 50, p. 75-104. 2004. 18.MARECHAL, J. P.; HELLIO, C. Challenges for the development of new non-toxic antifouling. International Journal of Molecular Sciences, v. 10, p. 4623-4637. 2009. 28.YEBRA, D. M.; KIIL, S.; WEINELL, C. E.; JOHANSEN, K. D. Effects of marine microbial biofilms on the biocide release rate from antifouling paints — A model-based analysis. Progress in Organic Coatings, v. 57, p. 56–66. 2006. 19.MARATHE, G. K.; SILVA, A. R.; NETO, H. C. C. F. Lysophosphatidylcholine and lyso-PAF display PAF-like activity derived from contaminating phospholipids. Journal of Lipid Research, v. 42, p. 1430 – 1437. 2001. 20.PETERSON, B. L.; CUMMINGS, B.S. A review of chromatographic methods for the assessment of phospholipids in biological samples. Biomedical Chromatography, v. 20, p. 227-243. 2006. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 44-53 53 Materiais Especiais Sulfonação da Base de Esmeraldina para Utilização como Membranas Trocadoras de Prótons para Células a Etanol Ana Paula Santiago De Falco Mestre em Engenharia Metalúrgica e de Materiais pela Universidade Federal do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. Cursando o Doutorado pela Universidade Federal do Rio de Janeiro, Instituto de Macromoléculas – Rio de Janeiro, RJ – Brasil. Pesquisadora do Instituto de Pesquisas da Marinha – Rio de Janeiro, RJ – Brasil. E-mail: [email protected] Magali Silveira Pinho Doutora em Ciência e Tecnologia de Polímeros pela Universidade Federal do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. Pesquisadora do Instituto de Pesquisas da Marinha – Rio de Janeiro, RJ – Brasil. E-mail: [email protected] Luis Cláudio Mendes Doutor em Ciência e Tecnologia de Polímeros pela Universidade Federal do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. Professor da Universidade Federal do Rio de Janeiro, Instituto de Macromoléculas – Rio de Janeiro, RJ – Brasil. E-mail: [email protected] Roberto da Costa Lima Doutor em Engenharia Metalúrgica e de Materiais pela Universidade Federal do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. Pesquisador do Instituto de Pesquisas da Marinha – Rio de Janeiro, RJ – Brasil. E-mail: [email protected] Wido H. Schreiner Doutor em Física pela Universidade Federal do Rio Grande do Sul – Porto Alegre, RS – Brasil. Professor do Departamento de Física da Universidade Federal do Paraná – Curitiba, PR – Brasil. E-mail: [email protected] Resumo Membranas trocadoras de prótons para células a combustível (PEMFCs, Proton Exchange Membrane Fuel Cells) são consideradas como alternativas muito promissoras para os motores à combustão de veículos e de plataformas militares. A membrana trocadora de prótons (PEM) constitui a parte central no sistema PEMFC e desempenha papel relevante nas condições operacionais do mesmo. Tentativas no desenvolvimento de PEMs, resistentes a temperaturas elevadas, incluem a utilização de polianilinas (PAni), que facilmente incorporam grupos sulfônicos, resultando na obtenção de polianilinas sulfonadas (SPAni). Neste trabalho, a PAni sob a forma de base de esmeraldina (EB) reagiu com ácido sulfúrico fumegante, resultando na obtenção de SPAni, que será processada por extrusão com PEEK (poli(éter éter cetona)), para utilização como PEMFC, a base de etanol. Os graus de protonação e de sulfonação de SPAni 54 foram avaliados pela Espectroscopia Fotoeletrônica de Raios-X (XPS). A reação de sulfonação, confirmada pela Espectroscopia de Infravermelho com Transformada de Fourier (FTIR), aumentou a higroscopicidade de EB, embora tenha ocorrido a protonação dos grupos imínicos. Palavras-chave Polianilina. Sulfonação. Membranas trocadoras de prótons para células a combustível. Sulfonation of Emeraldine Base for Proton Exchange Membrane for Ethanol Fuel Cells Abstract Proton exchange membrane fuel cells (PEMFCs) are considered as promising alternatives to traditional combustion engines for naval platforms and automobiles. The proton exchange membrane (PEM) is the central part in a PEMFC system and has a major influence on the system´s operating conditions and overall performance. Efforts in the development of high-temperature PEMs include the use of polyanilines (PAni), which directly incorporate sulfonic acid groups, resulting in the sulfonated polyanilines (SPAni). In this paper, the emeraldine base (EB) form of polyaniline reacted with fuming sulfuric acid, for the formation of SPAni composite membranes with PEEK (poly(ether ether ketone)), which will be prepared by extrusion, for direct ethanol fuel cell. The degrees of protonation and sulfonation of SPAni were evaluated by X-Ray Photoelectron Spectroscopy (XPS). The sulfonation reaction, confirmed by the infrared spectroscopy (FTIR), resulted in an increase of the water absorption by EB, although the protonation of the imine groups had also occurred. Keywords Polyaniline. Sulfonation. Proton exchange membranes for fuel cells. 1. INTRODUÇÃO Membranas trocadoras de prótons (PEMs, Proton Exchange Membranes) para células a combustível (PEMFCs, Proton Exchange Membrane Fuel Cells) são consideradas como alternativas muito proRevista Pesquisa Naval, Brasília, n. 24, 2011, p. 54-59 Materiais Especiais missoras para os motores à combustão das plataformas navais. A PEM é a parte central do sistema PEMFC e em muito influencia as condições operacionais e de desempenho como um todo. Membranas poliméricas à base de ácido perfluorossulfônico (PFSA) não são adequadas para as PEMs submetidas a altas temperaturas, devido à significativa perda em condutividade de prótons e a baixas condições de umidade, decorrentes de desidratação das membranas. As primeiras tentativas no desenvolvimento de PEMs resistentes a altas temperaturas incluíram modificação de polímeros à base de PFSA com materiais higroscópicos e a síntese de polímeros, tais como as polianilinas (PAni), que incorporam grupos sulfônicos, aumentando a higroscopicidade (CHEN et al., 2006; SANKIR et al., 2006). A sulfonação de polianilina é uma reação de substituição eletrofílica de anéis aromáticos, na qual o grupamento -SO3H introduzido na cadeia desempenha um papel importante na dependência da condutividade com o pH (NAGARALE et al., 2006). Segundo a literatura, membranas sulfonadas à base de PEEKK-PAni têm sido utilizadas em células a combustível, a base de metanol (XIANFENG et al., 2006). Neste trabalho, as variações químicas decorrentes da reação de sulfonação foram observadas pela Espectroscopia de Infravermelho (FTIR) enquanto os graus de dopagem (protonação) e de sulfonação foram determinados pela espectroscopia fotoeletrônica de raios-X (XPS). A estabilidade térmica foi avaliada pela análise termogravimétrica (TGA) e pela derivada (DTG). A reação de sulfonação resultou em um aumento do caráter higroscópico de EB, embora a protonação dos grupos imínicos também tenha ocorrido. 2. METODOLOGIA 2.1. Obtenção de SPAni Inicialmente, foi obtida a polianilina dopada com ácido clorídrico (PAni-HCl), conhecida como sal Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 54-59 de esmeraldina (ES), utilizando a rota sintética descrita na literatura (PINHO, 2006). Posteriormente, a ES foi neutralizada com solução 0,1 M de hidróxido de amônio, resultando na obtenção de EB. A rota sintética para a obtenção de SPAni consistiu da adição de 40 ml de ácido sulfúrico fumegante a 5 °C, contendo 20 % de SO3, a 0,5 g de EB. O sistema foi mantido em banho de gelo por 15 min, sob agitação magnética. Em seguida, retirou-se o banho de gelo e a solução foi mantida sob agitação por 1 h, na temperatura ambiente. A solução foi vazada em metanol a frio para precipitar o polímero modificado (SPAni). O produto foi filtrado e lavado com água destilada até obtenção de pH neutro para o filtrado. Por fim, o precipitado foi seco em estufa, até peso constante. O pó de SPAni foi caracterizado por FTIR, XPS, TGA e DTG. 2.2. Análises de XPS Os espectros de XPS foram fornecidos pelos espectrômetros fotoeletrônicos de raios-X, modelos XSAM-800 da Kratos Analytical Instruments para a amostra de EB e VGX900 ASCIIP da VG Microtech para a SPAni, ambos com fonte Mg Kα de raios-X (1253,6 eV) (PINHO, 2006; WEI et al., 1999). 2.3. Espectrometria de Infravermelho com Transformada de Fourier (FTIR) Os espectros de infravermelho foram obtidos pela utilização do espectrômetro Varian 3100. As amostras foram analisadas sob a forma de pastilhas com KBr (PINHO, 2006). 2.4. Análises Térmicas (TGA e DTG) As análises termogravimétricas (Thermogravimetry e Derivative Thermogravimetry Analyses) foram realizadas no modelo Q500 da TA Instrument Thermogravimetric Analyzer, para a faixa de temperatura de 30 a 700 °C, com taxa de aquecimento de 10°C/min. 55 Ana Paula S. De Falco / Magali S. Pinho / Luis Cláudio Mendes / Roberto da C. Lima / Wido H. Schreiner 3. RESULTADOS E DISCUSSÃO TABELA 1 Análise elementar por XPS da amostra de EB. De acordo com a literatura especializada da área, a base de esmeraldina (EB) (razão amina/imina de 1/1, isto é, grau de oxidação de 0,5) corresponde à forma de oxidação mais estável das polianilinas e, por este motivo, torna-se mais difícil a redução para a base de leucoesmeraldina (100% função amina) e a oxidação para a base de pernigranilina (100 % função imina). Pelo exposto, a reação de sulfonação ocorreu na EB (PINHO, 2006; WEI et al., 1999; DE FALCO et al., 2009). Os espectros de XPS para SPAni são apresentados nas Figuras 2 e 3 para N1s e S2p, enquanto a Tabela 2 apresenta os valores das energias de ligação (BE em eV) e, entre parêntesis, das áreas (%) e das larguras das bandas a meia altura, em eV (FWMN, Full Widths at Half Maximum). A Figura 1 ilustra o espectro de XPS de nitrogênio (N1s) para a EB e a Tabela 1 apresenta os dados fornecidos pela deconvolução do espectro. FIGURA 2 Espectro de XPS de N1s de SPAni. FIGURA 1 Espectro de N1s da EB. A Figura 1 apresenta a deconvolução do espectro de XPS de N1s para a EB, indicando a presença de dois picos principais com energias de ligação em 398,1 e 399,3 eV, correspondentes aos nitrogênios imínicos (-N=) e amínicos (-NH-) semelhantes em intensidades, consistentes com o grau de oxidação de 0,50. A presença residual de unidades protonadas (N1+ e N2+), ilustradas sob a forma de caudas com elevada energia de ligação (BE, binding energy), indica uma desprotonação incompleta da PAni-HCl, confirmada na Tabela 1 pela presença de cloro (0,5 %). 56 De forma análoga à amostra de EB, o espectro de N1s da SPAni na Figura 2 também apresenta os picos com BE em 398,1 e 399,4 eV, porém, com diferentes intensidades. Como a reação de sulfonação ocorreu na EB, uma grande parte dos N imínicos foi protonada, ilustrada pela redução da área percentual do pico A, em comparação com o pico B. Estes resultados estão de acordo com a literatura especializada (WEI et al., 1999), uma vez que os nitrogênios imínicos são mais facilmente protonados em relação aos amínicos e que a protonação ocorre, de forma preferencial, em relação à sulfonação para a EB. Os dois picos com energias de ligação Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 54-59 Materiais Especiais em 400,9 e 401,7 eV são atribuídos aos nitrogênios com carga positiva e o valor percentual da área total destes picos, correspondente à 30 %, é atribuído ao grau de protonação (0,30), de acordo com a literatura (WEI et al., 1999). Tabela 2 Energias de ligação (eV) e valores percentuais da área e FWMN (entre parêntesis) dos componentes de XPS dos picos das linhas de N1s e S2p para a SPAni. Conforme ilustra a Figura 3, o espectro S2p foi ajustado como um doublet simples. A origem do pico com maior intensidade e menor BE pode ser atribuída ao enxofre (S) do ânion (HSO4-), que protona preferencialmente o anel imínico, resultando em sítios catiônicos (nitrogênios positivamente carregados). O pico com mais elevada BE pode ser atribuído ao S do –SO3H, ligado ao anel benzênico. A explicação para estas assertivas é que o S nos grupos (HSO4-) que protonam, preferencialmente, os nitrogênios imínicos, apresenta uma maior densidade eletrônica em relação aos grupos sulfônicos neutros (–SO3H). A Tabela 3 ilustra os resultados da análise elementar por XPS da amostra de SPAni. Tabela 3 Análise elementar por XPS da amostra de SPAni. Os valores teóricos correspondem a 66,6 % para o carbono, 11,1 % para o nitrogênio, 5,6 % para o enxofre e 16,7 % para o oxigênio (WEI et al., 2009). A amostra de SPAni apresentou um valor mais elevado para C/N e mais baixo para S/N em relação aos valores teóricos de 6,0 e 0,50, respectivamente. O valor mais baixo de S/N, correspondente a 0,41, vem corroborar a protonação dos N imínicos. O excesso de C e O pode ser atribuído à contaminação superficial por hidratos de carbono, de acordo com a literatura (WEI et al., 1999). Na Figura 4 são apresentados os espectros de FTIR da EB e SPAni. FIGURA 4 Espectros de FTIR de (a) EB e (b) SPAni. FIGURA 3 Espectro de XPS de S2p de SPAni. Na Figura 4, podem ser observadas diferenças significativas decorrentes da reação de sulfonação, tais como a presença das bandas em 1075 cm-1, Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 54-59 57 Ana Paula S. De Falco / Magali S. Pinho / Luis Cláudio Mendes / Roberto da C. Lima / Wido H. Schreiner 1007 cm-1 e 610 cm-1, que podem ser atribuídas ao estiramento vibracional de S ligado ao anel aromático. A ocorrência destas duas bandas principais, entre 1100 e 100 cm-1 são indicativas da ligação de grupos (SO3-) ao anel benzênico. O ombro em aproximadamente 1420 cm-1 pode ser atribuído à protonação pelos íons (HSO4-) (PINHO, 2006; HUANG & MACDIARMID, 1993; LUX, 1994). FIGURA 6 Curvas de TGA/DTG da amostra de SPAni. O aumento significativo da banda de absorção na faixa de (3400 - 3200 cm-1) indica a maior absorção de umidade pela amostra de SPAni. As curvas de TGA e DTG para a amostra de EB, ilustradas na Figura 5 apresentam duas etapas de degradação. A primeira, na faixa de 40 a 100 °C, corresponde à perda de água. A segunda, com início em aproximadamente 350 °C, corresponde à degradação do polímero (EB). De forma análoga, o estudo de estabilidade térmica da amostra de SPAni na Figura 6 apresentou duas etapas de degradação. A perda de massa na faixa de 237 a 300 °C foi atribuída à decomposição dos grupos sulfônicos, seguida pela decomposição do polímero. A presença dos grupos sulfônicos resultou em redução da estabilidade térmica do polímero, que para a EB foi de 586°C e para a SPAni de 279 °C, correpondentes às temperaturas de taxa máxima de decomposição (DE FALCO et al., 2009). A Figura 7 ilustra as curvas de TGA/DTG do polímero de engenharia utilizado (PEEK) para produção das membranas com SPAni. FIGURA 7 Curvas de TGA/DTG de PEEK. FIGURA 5 Curvas de TGA/DTG da amostra EB. Conforme os resultados ilustrados pela Figura 7, pode ser observada a maior estabilidade térmica de PEEK, em relação à amostra de SPAni, tornando-se promissor seu emprego na obtenção dos sistemas PEEK/SPAni para utilização como membranas trocadoras de prótons. 58 Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 54-59 Materiais Especiais 4. CONCLUSÕES O grau de sulfonação de 0,41 determinado por XPS, inferior ao valor teórico de 0,50, pode ser atribuído à protonação, preferencial, dos grupos imínicos, cujo percentual correspondeu a 30%. Pelos resultados de FTIR foi confirmado que ambas a protonação e sulfonação ocorreram e que a sulfonação acarretou no aumento da higroscopicidade de SPAni. A análise térmica evidenciou a menor estabilidade térmica da amostra de SPAni em relação à EB e PEEK. REFERÊNCIAS Chen, C. Y.; Rodriguez, J. I. G.; Duke, M. C.; Costa, R. F. D.; Dicks, A. L.; Costa, J. C. D. Journal of Powder Source, 166, 324-330 (2006). Nafion/polyaniline/silica composite membranes for direct methanol fuel cell application. DE Falco, A. P. S.; PINHO, M. S.; MENDES, L. C. Thermal properties of sulfonated PAni. In: Proceedings of Polychar 17-World Forum on Advanced Materials, Rouen, France, 2009, 21. HUANG, W. S.; MACDIARMID, A. G. Optical properties of polyaniline. Polymer, 34, 1833-1845 (1993). LUX, F. Polymer, 35, 2915-2936 (1994). Properties of electronically conductive polyaniline: a comparison between well-known literature data and some recent experimental findings. Nagarale, R. K.; Gohil, G. S.; Shahi, V. K. Journal of Membrane Science, 280, 389-396 (2006). Sulfonated poly(ether ether ketone)/polyaniline composite proton-exchange membrane. PINHO, M. S. Materiais Absorvedores de Radiação Eletromagnética em Matrizes de Policloropreno. 1a ed., Brasília: Comissão de Relações Exteriores e de Defesa Nacional da Câmara dos Deputados, 2006, p. 467. Sankir, N. D.; Mecham, J. B.; Goff, R. M.; Harrison, W. L.; Claus, R. O. Smart Materials and Structures, 15, 200-203 (2006). Novel ductile polyaniline/sulfonated poly(arylene ether sulfone) composites. WEI, X. L.; FAHLMAN, M.; EPSTEIN, A. J. Macromolecules, 32, 3114-3117 (1999). XPS study of highly sulfonated polyaniline. XIANFENG, L.; DONGJU, C.; DAN X.; CHENGJI, Z.; ZHE, W.; HUI, L.; HUI, N. Journal of Membrane Science, 275, 134-140 (2006). SPEEKK/polyaniline (PAni) composite membranes for direct methanol fuel cell usages. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 54-59 59 Processos Decisórios Sistema baseado em Inteligência Artificial para Agrupamento e Classificação de Dados na Construção Naval Karen Barañano Souza Cursando o Mestrado em Engenharia Oceânica pela Universidade Federal do Rio Grande – Rio Grande, RS – Brasil. E-mail: [email protected] Silvia da Costa Botelho Doutora em Informática e Telecomunicações pelo Centre National de la Recherche Scientifique – Paris – França. Professora da Universidade Federal do Rio Grande – Rio Grande, RS – Brasil. E-mail: [email protected] Resumo O estudo objetivou desenvolver um sistema baseado em inteligência artificial, com o uso de redes neurais artificiais, mais especificamente de arquiteturas de mapas auto-organizáveis, utilizando o algoritmo de kohonen para agrupamento e multilayer perceptron (MLP), backpropagation para classificação de dados, que possibilitem a melhoria do agregamento das diferentes partes estruturais dos navios, identificando os diversos elementos de uma família de produtos e os agrupando, conforme os atributos de projeto e produtivos, utilizando os princípios da tecnologia de grupo de forma a mobilizar recursos específicos em sua concepção e a minimizar custos. A metodologia desenvolvida destacou a aplicação de técnicas inteligentes, sendo descrita a função de cada variável envolvida no sistema de agrupamento e classificação de dados e, assim, contribuir nas funções de planejamento, com ganhos de eficiência na manufatura, melhoria no controle do processo e instruções padronizadas, possibilidade para a formação de células de manufatura, e, ainda, contribuir para o aumento da qualidade e do controle na construção naval. Palavras-chave Inteligência Artificial. Redes Neurais Artificiais. Agrupamento e Classificação de Dados. Construção Naval. System based on Artificial Intelligence for Data Grouping and Classification in Shipbuilding 60 Abstract The study aimed to develop a system based on artificial intelligence, with the use of artificial neural networks. More specifically self-organizing maps architectures, using Kohonen’s algorithm for grouping and multilayer perceptron (MLP), backpropagation for data classification which enables the improvement of aggregation of all different structural parts of ships, identifying the various elements of a family of products and grouping them, concerning the project and productives attributes, using the principles of group technology to mobilize specific resources in its conception and minimize costs. The developed methodology highlighted the application of intelligent techniques, describing the function of each variable involved in the system of data grouping/ classification. To contribute in functions planning, by gaining in manufacturing efficiency,process improvement and standardized instructions control, possibility for the formation of manufacturing cells, and also to increase shipbuilding quality and control. Keywords Artificial Intelligence. Artificial Neural Networks. Data Grouping and Classification. Shipbuilding. 1. INTRODUÇÃO No seu processo de retomada o setor de construção naval brasileiro necessita de condições específicas para competir no mercado internacional. Velasco (1997) considera que, para não se repetir os erros do passado, é preciso investir em condições organizacionais, incluindo, dentre outras medidas, a modernização das práticas gerenciais e dos métodos produtivos. Diante do exposto, é importante decidir-se sobre o melhor emprego dos recursos de produção, assegurando assim a execução do que foi previsto pelo planejamento e pelo controle da produção, que, em nível mais agregado, envolve a administração Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 60-67 Processos Decisórios da capacidade de produção, de modo a atender as flutuações da demanda. Para tal deve-se estabelecer em mais alto nível técnicas para mensurar a capacidade de produção e a demanda, técnicas que discriminem os diferentes produtos e os serviços que uma operação produtiva pode fazer, conciliando, no nível geral e agregado, a existência da capacidade com o nível de demanda a ser satisfeita. Tendo em vista as variações atuais no mercado global de navios a médio e a longo prazo, caracterizando aos estaleiros uma demanda estocástica, é importante decidir como a operação deve reagir a estas flutuações (TORQUATO e SILVA, 2000). É cada vez mais decisivo aumentar a colaboração entre as principais áreas das empresas e isso é conseguido por meio da aplicação de novas tecnologias (SWINK, 2006). Estas vêm permitindo a definição mais precisa da capacidade do estaleiro a longo prazo, bem como a produção em série dos navios mais demandados (graneleiros, petroleiros) e a produção de navios com alta tecnologia embarcada. Neste novo cenário tecnológico é característica importante a definição de níveis de capacidade em médio e em longo prazo em termos agregados, ou seja, é importante tomar decisões de capacidade amplas e gerais, não se preocupando com todos os detalhes dos produtos e serviços oferecidos. Neste contexto, surgem políticas agregadas de gestão as quais assumem que o mix de diferentes produtos e serviços permanece relativamente constante durante o período de planejamento adequando-se ao produto final de acordo com sua complexidade. Desta forma, é possível a criação de frameworks1 genéricos que atendam de forma satisfatória as variações do produto final. Estas estruturas genéricas podem ser utilizadas de forma a otimizar os diferentes processos fabris associados a cada encomenda. Ferramentas tecnológicas tornam-se um comFramework – atua onde há funcionalidades em comum a várias aplicações, porém para isso as aplicações devem ter algo razoavelmente grande em comum para que o mesmo possa ser utilizado em várias aplicações. 1 Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 60-67 ponente importante para o sucesso da implantação de estratégias de utilização de frameworks genéricos. Naturalmente, os avanços tecnológicos exigirão níveis maiores de qualificação da mão de obra. Na evolução do mercado da construção naval, elenca-se um conjunto de ações que podem contribuir para o aumento de produtividade. Dentre estas, pode-se citar a padronização de navios, que possibilita uma maior velocidade de construção, além da maior flexibilidade para atender a novos escopos de projeto. Associadas à padronização, novas práticas se instituem, como a adoção da construção por blocos, em que seções inteiras são pré-montadas. Esta pré-montagem inclui os equipamentos, eixos e redes pré-alinhadas, deixando para a carreira apenas a montagem final, reduzindo a utilização da carreira ou dique, conduzindo a um aumento significativo na produtividade do estaleiro, com o uso do dique paralelamente por outros navios (PINTO et.al., 2010). A definição de grupos estruturais que otimizem os atributos de projeto e produtivos é um desafio associado à produção em blocos e por famílias. A complexidade associada à diversidade de formas e processos produtivos presentes a médio prazo no estaleiro, conduz à necessidade do uso de métodos matemáticos para a categorização e a classificação dos conjuntos a serem agregados. Recentemente, técnicas de Inteligência Artificial vêm sendo empregadas na definição destes grupos (SOUZA, 2008) devido a sua capacidade para tratamento de padrões complexos e não-lineares (HAYKIN, 2001). Com base em tais técnicas, metodologias podem ser desenvolvidas e aplicadas a diferentes estaleiros, levando em conta os quesitos customizados de cada canteiro e modelo de produção. Desta forma, o objetivo deste trabalho é desenvolver um sistema baseado em inteligência artificial que possibilite a melhoria do agregamento das diferentes partes estruturais dos navios, identificando os diversos elementos de uma família de produtos e os agrupando de acordo com os atributos de projeto e produtivos, utilizando os 61 Karen Barañano Souza / Silvia da Costa Botelho princípios da tecnologia de grupo de forma a mobilizar recursos específicos (Células de Manufatura) em sua concepção e minimizar custos. 2. MÉTODO A metodologia proposta para a concepção de um modelo de agrupamento e para a classificação de famílias de produtos intermediários foi feita a partir de um Banco de Dados de Histórico de Produtos e com a descoberta do número de grupos de famílias presente no universo de amostragem (banco de dados de histórico). O reconhecimento de padrões feito por categorização (Clustering), utilizando os mapas auto-organizáveis de Kohonen para apresentação dos dados e as classes obtidas por meio do reconhecimento de padrões do SOM são utilizadas como metas para treinamento de uma rede supervisionada MLP – Backpropagation – para treinarem a rede. A metodologia foi implementada utilizando a ferramenta matemática MATLAB – MATriz LABoratory –, sua escolha se deve ao seu extenso conjunto de rotinas para a obtenção de saídas gráficas, boa interface com outros sistemas e ferramentas adequadas ao estudo de sistemas de classificação de famílias de produtos intermediários baseado em análise de sistemas inteligentes. 3. DADOS Como entrada utiliza-se um banco de dados que possui um total de 30 blocos que pertencem a um organismo paralelo ao grande bloco (anel) de um tanque Suezmax. Cada um dos blocos de construção com seis variáveis (RD=6): comprimentos de solda (na posição e vertical), peso, volume e número de painéis e submontagens, conforme Tabela 1. TABELA 1 ‘Blocks’ (Dados). Fonte: Souza, p. 98, 2009. 62 Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 60-67 Processos Decisórios A base de dados é limitada devido à disponibilidade de informações, no entanto os códigos foram desenvolvidos assumindo que bases de dados de maior porte poderiam estar disponíveis. FIGURA 1 Esquema dos blocos de construção. Fonte: ONIP, 2008. 3.1. Implementando o Módulo Agrupador SOM Para a definição automática das famílias presentes no histórico foi utilizada a SOM Toolbox, uma implementação do mapa auto-organizável de Kohonen em Matlab. Esta toolbox2 pode ser utilizada para pré-processamento dos dados, inicialização e treinamento do mapa auto-organizável em várias topologias 2 Toolbox – Pacote de trabalho –. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 60-67 e visualização dos dados e do mapa após o treinamento. No aprendizado não supervisionado a rede analisa os padrões, as regularidades e as correlações para agrupar o conjunto de dados em classes (Clusters), a partir da matriz ‘Blocks’ (Tabela 1). O experimento é repetido para um total de N vezes, cada vez deixando de fora um exemplo diferente para a validação (BURNHAM; ANDERSON, 2004). Como resultado obtemos o mapa da Figura 2. 63 Karen Barañano Souza / Silvia da Costa Botelho FIGURA 2 Clusterização dos Dados. O próximo passo é usarmos o mapa resultante, que define o número ideal de classes (Tabela 2) como entrada no algoritmo de classificação Backpropagation. TABELA 2 Número ideal de Classes. 64 O número ideal de classes está associado ao número de linhas de produção específicas que serão planejadas para implementação de um projeto. 3.2. Classificador: Algoritmo Backpropagation A partir da definição do número ideal de classes, conforme Tabela 2, é utilizado o modelo de rede neural (RN) MLP-BP para treinamento dos dados. Após a validação da RN para um conjunto de dados específico, é necessário que sejam salvos sua topologia e seus principais parâmetros de conexão. Feito isso, é possível classificar qualquer Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 60-67 Processos Decisórios novo conjunto de dados sem esforço adicional de treinamento e de validação. A Tabela 3 apresenta o comportamento de suas saídas para o conjunto de treinamento, validação e teste. 4. RESULTADOS Uma vez finalizado o processo de aprendizado, a rede escolhida é utilizada para classificação. A Tabela 4 apresenta a saída desta rede para o conjunto completo de blocos presentes no histórico. Verifica-se que a rede classificou corretamente todos os elementos existentes, incluindo aqueles utilizados para aprendizado, validação e teste. Os testes são baseados em um histórico real de informações estruturais de blocos de um navio Suezmax. Uma etapa de obtenção automática das famílias foi inicialmente realizada com a rede SOM. Em seguida, de posse dos grupos, uma MLP foi desenvolvida para classificar o histórico de bloco em uma das famílias resultantes. Vários testes com a rede SOM, verificando a sua sensibilidade frente a vários parâmetros, foram realizados. A melhor rede foi escolhida fornecendo o conjunto de famílias presentes no universo de entrada. A rede SOM forneceu a base de treinamento para o histórico de blocos. Cada bloco foi associado a uma família. Utilizou-se a rede MLP para aprender esta associação. O avaliador de desempenho utilizado para avaliar os resultados das redes neurais simuladas foi o MSE. Nas diversas redes testadas a que obteve melhor capacidade de generalização dos dados apresentados foi a que apresenta a topologia de 15 neurônios na camada oculta, taxa de aprendizado (lr) de 0,1, algoritmo de treinamento ‘traingd’, de aprendizagem ‘learngdm’ e função de ativação e de saída – tangente hiperbólica sigmóide‘tansig’3. A partir dos dados específicos presentes no histórico, obteve-se a topologia e os parâmetros da melhor RN que classificou seus elementos. Esta pode ser usada para classificar qualquer novo Os demais valores não citados são Default’s da ferramenta utilizada para treinamento, validação e teste. 3 TABELA 3 Comportamento da MLP frente ao aprendizado. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 60-67 65 Karen Barañano Souza / Silvia da Costa Botelho TABELA 4 Resultados obtidos frente às diferentes taxas de aprendizado. conjunto de dados sem esforço adicional de treinamento. 5. CONCLUSÃO O principal objetivo deste trabalho foi utilizar os conhecimentos de planejamento e de gestão da 66 produção na construção naval aliados a modernas técnicas gerenciais: clusterização e classificação de dados, com a utilização de ferramentas de Inteligência Artificial (RN), permitindo, desta forma, novos entendimentos sobre as possibilidades existentes para a classificação de grandes conjuntos de dados dentro do ambiente produtivo na construção naval. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 60-67 Processos Decisórios Os métodos utilizados fazem uso de Mapas Auto-organizáveis para obtenção das principais famílias de produtos e Redes Multi-Camadas para a classificação automática de novos blocos. Os conceitos de SOM foram originalmente apropriados ao processo de definição de grupos de famílias na construção naval, tendo sido especificados os requisitos de entrada e saída dos sistemas envolvidos, frente às bases de dados presentes em um estaleiro. A sensibilidade da SOM e MLP a vários parâmetros foi analisada. Em todos os testes as redes apresentaram resultados adequados. Os resultados da avaliação realizada validaram a proposta, indicando a possibilidade de seu uso em situações reais de aplicação aos sistemas de produção de estaleiros, contribuindo para a adoção da filosofia de tecnologia de grupo e manufatura celular nos canteiros de obras. REFERÊNCIAS HAYKIN, S. Redes Neurais: Princípios e Práticas. 2ª ed. Porto Alegre: Bookman, 2001. ORGANIZAÇÃO NACIONAL DA INDÚSTRIA E PETRÓLEO. 3ª ed. Café com Energia. EISA - Estaleiro Ilha S.A. Projeto e Construção de quatro Navios Petroleiros para Transpetro, 2008. PINTO, M. M. et.al. Work Shop CEGN\PPCPE na Construção Naval. Centro de Estudos em Gestão Naval-CEGN. Disponível em: <http://www.gestaonaval.org.br/arquivos/Documentos/ Ind%20Naval%20-%20WS1/11ws1_PPCPE_DavidGoldberg. pdf>. Acessado em: 13 mar. 2010. SOUZA, C. M. et al. Shipbuilding Interim Product Indentification and Classification System Based on Intelligent Analysis Tools. Disponível em: <http://www.anast.ulg.ac.be/ COMPIT08/Files/COMPIT_programme.pdf> Acesso em: 12 dez. 2008. SOUZA, C. M. Técnicas Avançadas em Planejamento e Controle da Construção Naval. Rio de Janeiro: Coppe/UFRJ, 2009. SWINK, M. Building Collaborative Innovation Capability. Research Technology Management, Indiana, USA, 2006. mar./apr. p. 37-47. TORQUATO, P .R. G.; SILVA, G. P. Tecnologia e estratégia: uma abordagem analítica e prática. São Paulo: Revista de Administração, 2000. V. 35, n.1, p.72-85, jan./mar. VELASCO, L. O. M. de L.; ERIKSOM, T. Informe Infra-estrutura. Área de projetos de infra-estrutura. BNDES. Agosto, 1997, n. 49. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 60-67 67 Sensores, Guerra Eletrônica e Guerra Acústica Redução de Seção Reta Radar com Emprego de Metamateriais Capitão-de-Corveta Márcio Martins da Silva Costa Mestre em Engenharia Eletrônica e Computação pelo Instituto Tecnológico de Aeronáutica – São José dos Campos, SP – Brasil. Centro de Guerra Eletrônica da Marinha – Niterói, RJ – Brasil. E-mail: [email protected] Capitão Aviador Luis Felipe de Moura Nohra Mestre em Engenharia Eletrônica e Computação pelo Instituto Tecnológico de Aeronáutica – São José dos Campos, SP – Brasil. Estado-Maior da Aeronáutica – Brasília, DF – Brasil. E-mail: [email protected] Tenente Coronel José Everardo J. Ferreira Mestre em Engenharia Eletrônica e Computação pelo Instituto Tecnológico de Aeronáutica – São José dos Campos, SP – Brasil. Especialista em Comunicações, cursando o Doutorado em Telecomunicações e Telemática pela Universidade Estadual de Campinas – Campinas, SP – Brasil. Estado-Maior da Aeronáutica – Brasília, DF – Brasil. E-mail: [email protected] Resumo Neste trabalho são apresentados os conceitos de metamateriais, a relevância das pesquisas realizadas e suas tendências. O impacto operacional de sua aplicabilidade para a defesa é verificada por meio de uma modelagem simplificada, onde a seção reta radar de uma plataforma é considerada. Os resultados alcançados mostram uma redução significativa na probabilidade de detecção de um meio que empregue esta tecnologia em comparação a outro que faz uso de técnicas furtivas convencionais. Palavras-chave Metamaterial. Left-Handed Metamaterial. Seção Reta Radar. Processamento de Sinais. Detecção de Alvos. Radar Cross Section Reduction with Employment of Metamaterials Abstract This paper presents the metamaterials concepts, the relevance of research conducted and its trends. The operational impact of its applicability for Defense is verified by a simplified model, where the Radar Cross Section (RCS) of a platform is considered. The results have showed a significant reduction in the probability of detection of a medium that employs this technology 68 in comparison to one that uses conventional stealth techniques. Keywords Metamaterial. Left-Handed Metamaterial. Radar Cross Section (RCS). Signal Processing. Targets Detection. 1. INTRODUÇÃO A busca de estruturas artificiais com a finalidade de alcançar propriedades diferentes das existentes na matéria não se limita ao século XXI (ENGHETA, 2003). Desde o final do século XIX, mais precisamente em 1898, Jagadis Chunder Bose, físico bengalês, foi o primeiro a realizar experiências com estruturas artificiais na faixa de micro-ondas. Em 1914, Karl F. Lindman demonstrou o efeito de um meio Chiral em ondas eletromagnéticas (LYNCH, 2004). Alguns anos depois, em 1948, Winston E. Kock, por meio de um arranjo periódico de esferas condutoras, discos e fitas, demonstrou a possibilidade de adaptar o índice de refração efetivo em meios artificiais, nos laboratórios da AT&T Bell. Contudo, foi o visionário físico russo Victor Georgievich Veselago que em 1967 apresentou as primeiras especulações teóricas acerca de certas substâncias não encontradas na natureza contendo simultaneamente permissividade e permeabilidade negativas e sendo, tais substâncias, denominadas Left-Handed Metamaterial (LHM) (VESELAGO, 1968). Em 1999, David R. Smith, da Universidade da Califórnia, e John Pendry, do Colégio Imperial de Londres, comprovaram, experimentalmente, a teoria de Veselago, fazendo uso de uma estrutura baseada em um arranjo periódico contendo inclusões com geometria do tipo Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 68-74 Sensores, Guerra Eletrônica e Guerra Acústica Split Ring Resonators (SRR) combinado com um arranjo periódico de segmentos condutores tipo “I” em substrato FR4 (Flame Retardant 4), onde caracterizaram a permissividade e a permeabilidade, ambas negativas, bem como o índice de refração, também negativo, ratificando, dessa forma, a predição teórica de Veselago, ou seja, os efeitos reversos da radiação VavilovCherenkov e de Doppler, inversão da Lei de Snell, oposição nos sentidos das velocidades de fase e grupo (vetor de Poynting) e índice de refração negativo na interface entre o meio RH (Right Handed) e o meio LH (Left Handed) (SMITH et al., 2000). A aplicação potencial de metamateriais é bem diversificada. A literatura especializada já possui abordagens em fotônica, acústica, superlentes, novas antenas com propriedades superiores e alta diretividade, nanolitografia óptica e nanocircuitos, mantas da invisibilidade (metacoatings) que podem tornar os objetos invisíveis (SARYCHEV e SHALAEV, 2007) o que sugere, também, a sua aplicabilidade em área de Defesa, ou seja, o uso de metamateriais como material furtivo, sendo uma tendência inovadora na tecnologia Stealth, aplicada em navios, aviões tripulados ou não (VANT), satélites, dentre outros. De acordo com registros nas literaturas do tema em comento, ao longo dos últimos dez anos têm surgido outros tipos de substrato e de inclusões como, por exemplo, geometrias retangular, hexagonal, Omega Like. Para que uma plataforma seja considerada Stealth, duas qualidades devem ser exploradas: as características eletromagnéticas de material que reveste a plataforma e a geometria da plataforma frente às ondas eletromagnéticas incidentes (LINDELL et al.,1992). Em 2010, foi introduzida, na literatura especializada da área, uma nova inclusão com geometria triangular equilátera de cobre impressa numa placa de circuito impresso (Printed Circuit Board - PCB) com substrato polytetrafluroethylene (PTFE) adicionado com fibras de vidro, e que, ao ser testado experimentalmente, comportou-se como uma lente ao longo da Banda X, sugerindo, entre outros, melhor diretividade em antenas, ressonadores de tipo Fabry-Perot, além de variar o índice de refração (EVERARDO et al., 2010). Considerando este breve histórico, percebese que na virada do século XX para o XXI o assunto ganhou nova dimensão e atenção da comunidade acadêmica, saindo da teoria para a demonstração. A publicação do assunto em respeitáveis periódicos aumentou de dezenas para milhares de artigos publicados, em pouco mais de sete anos, destacando-se a presença de países como os Estados Unidos, Canadá, Portugal, França, Itália, Espanha, Alemanha, Reino Unido, Finlândia, Rússia, China e Japão (SARYCHEV e SHALAEV, 2007) . Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 68-74 Para efeito deste artigo foi considerada a aplicação de metamateriais nas superfícies de aeronaves, visando a diminuição da sua Seção Reta Radar (SRR), objetivando a degradação da capacidade de detecção dos radares inimigos. Na Figura 1, a seguir, são apresentadas duas aeronaves em aproximação a uma força naval. As semiesferas centradas nos navios ilustram as alterações sofridas na capacidade detecção dos seus radares em virtude das diferentes Seções Reta Radar das aeronaves em oposição. Ressalta-se que neste trabalho não foi desenvolvida uma modelagem numérica envolvendo os materiais de revestimentos dos alvos. A metodologia empregada pautou-se em buscar na literatura da área resultados e parâmetros possíveis de serem incorporados em uma modelagem de processamento de sinais radar, a fim de verificar o impacto operacional da aplicação de metamateriais em cenários de defesa. 69 Márcio Martins da Silva Costa / Luis Felipe de Moura Nohra / José Everardo J. Ferreira Figura 1 Capacidade de detecção de radares contra aeronaves com diferentes RCS. 2. CONCEITO DE METAMATERIAIS O termo Metamaterial foi criado por Rodger M. Walser (VALANJU et al., 2002), em 1999, na Universidade do Texas em Austin/USA. Metamateriais são estruturas artificiais com propriedades eletromagnéticas únicas ou superiores aos materiais convencionais. A palavra “meta” em Grego significa além de, acima de, e, neste sentido, o nome metamaterial significa além ou acima dos materiais convencionais, daqueles encontrados na natureza e que possuem permissividade e permeabilidade positivas, contidas no primeiro quadrante, são os chamados de Materiais “destros” ou conhecidos universalmente como RH. Metamateriais são todos aqueles cuja permissividade e permeabilidade diferem dos RH. Por exemplo, um material cuja permissividade seja negativa e permeabilidade positiva é um metamaterial – 2º quadrante da Figura 2 – (EVERARDO et al., 2008). Um determinado material com permissividade positiva, porém com permeabilidade negativa (4oquadrante) também é um metamaterial. No entanto, o mais especial de todos é exatamente o dual dos RH que são os materiais “canhotos” conhecidos universalmente por LH e que a permissividade e permeabilidade estão contidas no terceiro quadrante. 70 Figura 2 Permissividade x Permeabilidade (e x m) (EVERARDO et al., 2008). 3. MODELAGEM CONSIDERADO DO CENÁRIO Para verificar a viabilidade de aplicação desta nova tecnologia furtiva, foi elaborada uma modelagem simplificada de um cenário naval onde duas aeronaves x e y voando em ala, sendo uma revestida com um metamaterial absorvedor e outra sem emprego de algum tipo de tecnologia furtiva, realizam manobra de ataque sobre uma fragata dotada de um Radar Doppler Pulsado, de acordo com a Figura 3. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 68-74 Sensores, Guerra Eletrônica e Guerra Acústica Conforme descrito na introdução deste artigo, ressalta-se que a modelagem numérica considerou somente o processamento de sinais radar, de acordo com modelos consagrados na literatura disponíveis nas referências (VAN TREES, 1968; SKOLNIK, 1988). no qual fs é a frequência da portadora para um comprimento de onda e . A refletividade complexa do alvo pontual é expressa por Figura 3 Cenário Considerado. em que (4) é a sua respectiva fase. Desconsiderando o efeito Clutter, foi adicionado um ruído térmico circularmente a gaussiano, ergódico, passa-faixa e de média nula, representado por , alterando a expressão (3) para (5) Para a Seção Reta Radar dos alvos foi considerado (PEEBLES, 1998) 3.1. Modelagem dos Sinais Considera-se que o sinal transmitido (VAN TREES, 1968; SKOLNIK, 1988) pelo radar da fragata seja expresso por (1) em que Es é a energia do sinal passa-faixa e equivale à envoltória complexa de s ( t ), representada por (6) no qual d é a distância de cada aeronave x e y à fragata, é a potência por unidade de área do espalhamento de na recepção da antena do radar da fragata e é a potência por unidade de área de incidente nas aeronaves. A RCS normalizada considerada passou a ser: (2) no qual Ts é a duração do pulso. Partindo do princípio de que haja um sinal eco, de acordo com o nível 2 da Teoria de Detecção apresentada por Van Trees (1968), o sinal considerado passa a ser (3) Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 68-74 (7) 3.2. Simulação Para realizar a simulação, foi considerada a abordagem realizada por Oraizi (2008), quando foram empregadas duas formas idênticas de cilindro de vidro, sendo uma revestida com metamaterial e outra sem revestimento. Em 71 Márcio Martins da Silva Costa / Luis Felipe de Moura Nohra / José Everardo J. Ferreira nossa modelagem simplificada os cilindros foram substituídos pelas duas aeronaves, optando-se por centralizar a frequência da portadora em 10 GHz. Nesta faixa da Banda X, Oraizi obteve uma redução de 40 dB na Seção Reta Radar dos metamateriais, que foi também aplicada à nossa aeronave com revestimento furtivo (ORAIZI, 2008). Foram consideradas 600 realizações na simulação, divididas equitativamente em dois eventos distintos. No primeiro caso, ambas as aeronaves não possuíam revestimentos furtivos. No segundo, a RCS normalizada de uma delas foi reduzida em 40 dB, a fim de se empregar os resultados de Oraizi na modelagem simplificada. A Figura 5 apresenta o sinal do vídeo bruto radar referente à segunda situação, gerada sob as mesmas condições, e na qual somente uma das aeronaves é apresentada. Figura 5 Segundo caso – vídeo bruto radar após 300 realizações e com uma das aeronaves revestida com metamaterial. 4. RESULTADOS A Figura 4 apresenta o sinal do vídeo bruto radar referente à primeira situação proposta, onde podem ser identificados nitidamente as duas aeronaves do cenário considerado. Para melhor identificá-las, foi considerada uma situação confortável de detecção com uma relação sinalruído (S/N) de 10 dB. Figura 4 Primeiro caso - vídeo bruto radar após 300 realizações e com ambas as aeronaves sem revestimento de metamateriais. Em seguida, empregou-se como método de integração convencional a aplicação de um integrador linear aos sinais ecos recebidos. Os resultados dos sinais de vídeo são apresentados nas Figuras 6 e 7, respectivamente, seguindo a ordem das situações propostas. Em ambas as figuras destacam-se pequenos falsos alarmes e a detecção da aeronave representada por um sinal de maior amplitude. Nota-se, no segundo caso, nenhuma presença da aeronave revestida com metamaterial. No primeiro caso, a probabilidade de detecção (Pd ) e a probabilidade de falso alarme (Pfa ) obtidas das duas aeronaves foram, respectivamente, 3,3x10-7 e 1,2x10-5. 72 Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 68-74 Sensores, Guerra Eletrônica e Guerra Acústica Figura 6 Primeiro caso – sinal de vídeo radar com integração linear após 300 realizações e com ambas as aeronaves sem revestimento de metamateriais. Na segunda situação, a probabilidade de detecção (Pd ) passou a 0,2x10-7 para uma mesma probabilidade de falso alarme (Pfa ) de 1,2x10-5. Ou seja, houve uma redução de 93,9% da capacidade de detecção da fragata diante do cenário considerado. Note que a redução de probabilidade não foi de 50%, devido ao fato de que a adição do ruído térmico circularmente gaussiano gerou falsos alarmes aleatórios nas 512 amostras em azimute e 1024 amostras em distância a cada varredura radar, ou seja, a cada realização. 5. CONCLUSÕES Figura 7 Segundo caso – sinal de vídeo radar com integração linear após 300 realizações e com uma das aeronaves revestida com metamaterial. A aplicação de metamateriais em áreas de defesa mudaria completamente a parte do cenário operacional afeta à Guerra Eletrônica. Conceitos técnicos e doutrinários sofreriam um grande impacto fruto na presença desta tecnologia furtiva de maior potencial do que as empregadas até então. Isso justifica o elevado interesse de respeitáveis membros da comunidade acadêmica e de órgãos governamentais, bem como de órgão do setor privado, em incrementar as pesquisas na referida área. O presente artigo pretende evidenciar esta linha de pesquisa na Guerra Eletrônica e os possíveis impactos operacionais em áreas de defesa, tendo em vista a perspectiva promissora de novos desdobramentos tecnológicos voltados para o uso dos metamateriais. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 68-74 73 Márcio Martins da Silva Costa / Luis Felipe de Moura Nohra / José Everardo J. Ferreira REFERÊNCIAS 1. EVERARDO, J. F. J.; EDIMAR, B. O. J.; ANDRADE, L. A. de; REZENDE, C.; MIGLIANO, A. C. da Cunha; PEROTONI, M. B. Simulation and Measurements Responses of Combined Circular SRR’s versus Combined Equilateral Triangle SRR’s on PTFE Substrate at X Band. Fourth International Congress on Advanced Electromagnetic Materials in Microwaves and Optics – Metamaterials 2010, Proceeding ISBN # 978-95292-7734-6, pp.165 – 167, Sept/2010. 2. EVERARDO, J. F. J.; EDIMAR B. O. J.; ANDRADE L. A. de. Projeto, Fabricação, Testes e Resposta em Frequência de Double Negative Metamaterials em uma dimensão utilizando Split-Ring Resonator com Geometria Triangular Equilátera de Cobre em Dielétrico Teflon e Fibra de Vidro. Anais do X Simpósio de Aplicações Operacionais em Áreas de Defesa (X SIGE), Instituto Tecnológico de Aeronáutica (ITA), pp. 24 – 26. Dez/2008. 3. LYNCH, D. Introduction to RF Stealth. Boston. SciTech Publishing Inc, 2004. 4. LINDELL, I. V.; SIHVOLA, A. H.; KURKIJARVI, J. Karl F. Lindman: the last Hertzian, and a Harbinger of Electromagnetic Chirality. Antennas and Propagation Magazine, IEEE, Vol. 34, No. 3, pp. 24 – 30; 1992. 5. ENGHETA, Nader. Invited – Metamaterials with Negative Permittivity and Permeability: Background, Salient Features, and New Trends. MTT – S Digest, IEEE, pp. 187 – 190; 2003. 74 6. ORAIZI, H. A. Abdolali. Combination of MLS, GA & CG for the reduction of RCS of multilayered cylindrical structures composed of dispersive metamaterials. Progress In Electromagnetics Research B, Vol. 3, 227 – 253, 2008. 7. PEEBLES, P. Z. Radar Principles. New York: John Wiley & Sons, Inc., 766 p., 1998. 8. SARYCHEV, Andrey K.; SHALAEV, Vladimir M. Electrodynamics of Metamaterials. ISBN – 13 978-981-024245-9; 2007. 9. SMITH, D. R. et al. Composite Medium with Simultaneously Negative Permeability and Permittivity. Physical Review Letters, 84–18, pp. 4184 – 4187, May 2000. 10. SKOLNIK, M. I. Introduction to Radar Systems. Singapore: McGraw-Hill Book Co, 1988. 11. VALANJU, P. M.; WALSER, R. M.; VALANJU, A. P. Wave Refraction in Negative – Index Media: Always Positive and very Inhomogeneous. Vol. 88, Nº. 18, Physical Review Letters, p. 87401-1 – 18740-4, May 2002. 12. VAN TREES, H. L. Detection, Estimation, and Modulation Theory – Parts I. New York: John Wiley and Sons, Inc. 1968. 13. VESELAGO, V. G. The electrodynamics of substances with simultaneously negative values of m and e. Sov. Phys.Usp., Vol. 10, Nº. 4, 509-514, 1968. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 68-74 Contribuição Especial Inteligência Artificial na Marinha: um Caminho a ser trilhado Capitão-de-Fragata Dilson Godoi Espenchitt Doutor em Sistemas Computacionais pela Universidade Federal do Rio de Janeiro – Rio de Janeiro, RJ – Brasil. Secretaria de Ciência, Tecnologia e Inovação da Marinha – Brasília, DF – Brasil. Email: [email protected] 1. INTRODUÇÃO Em razão da disponibilização, aquém do desejável, dos seus recursos, a Marinha do Brasil (MB) vê-se cada vez mais compelida a buscar otimização para o cumprimento das suas tarefas. Todavia, cumpre ressaltar, que tal otimização não deve comprometer as conquistas já alcançadas e tão pouco restringir as iniciativas de novas conquistas nas esferas: administrativas, tecnológicas e operativas. O treinamento em campo e o aperfeiçoamento do pessoal da MB, a cada dia, ficam mais caros, portanto, sem deixar de considerar as restrições orçamentárias, é preciso buscar soluções que permitam à instituição manter-se sempre pronta a atender às tarefas do Poder Naval, um dos componentes do Poder Militar, o que é, sem dúvida, tarefa que compete à Marinha do Brasil. A Inteligência Artificial (IA), ferramenta já amplamente reconhecida como fator de melhoria do desempenho em diversas atividades da vida civil, pode ser usada com os mesmos propósitos na vida militar, no sentido de prover, a um custo relativamente baixo, os recursos que propiciem o alinhamento do desenvolvimento tecnológico com o contexto financeiro. A proposta precípua deste artigo é apresentar uma parte significativa dos potenciais de utilização da Inteligência Artificial, considerada, aqui, uma prática tecnológica viabilizadora da melhoria dos processos desenvolvidos pela MB. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 75-81 Ainda no presente artigo, demonstrar-se-á a possibilidade de utilização da IA no auxílio ao adestramento, ao planejamento e ao teatro de operações, buscando, desse modo, a otimização dos recursos materiais, humanos, bem como a otimização do tempo destinado à realização das tarefas. 2. O QUE É INTELIGÊNCIA ARTIFICIAL O conceito de inteligência é relativo à construção de estruturas cognitivas do ser humano, responsável pela formação da razão, característica peculiar ao homem e um dos seus diferenciais diante dos demais animais. Como o ser humano é o único animal racional, diz-se que ele é o único ser inteligente. [6] Há estudos científicos que atribuem o conceito de inteligência a outros animais e, até mesmo, a vegetais, mas obviamente, esse não é um conceito comparável ao da Inteligência Humana. Pode-se dizer, isto sim, que esse conceito de inteligência é relativo à analise em questão: essa inteligência irracional seria, portanto, a capacidade de adaptação de um ser vivo às circunstâncias do seu meio ambiente. Assim, pode-se utilizar esse conceito para a máquina, definindo, então, uma Inteligência de Máquina. Essa inteligência, a princípio, era entendida como a capacidade genética de um instrumento de solução de problemas. Por capacidade genética entenda-se, aqui, todo o conhecimento embutido em nível de hardware e de software instalado, o que permite um determinado conjunto de estados possíveis de funcionamento por meio de programas. A inteligência de máquina seria, então, um tipo de inteligência construída pelo homem, portanto, uma Inteligência Artificial.Atualmente, o conceito de IA abarca mais do que a inteligência de máquina. 75 Dilson Godoi Espenchitt Pretende-se, com a IA, capacitar o computador com um comportamento inteligente. Entende-se por comportamento inteligente atividades que somente um ser humano seria capaz de efetuar. Dentre estas atividades podem ser citadas aquelas que envolvem tarefas de raciocínio (Planejamento e Estratégia), percepção (reconhecimento de imagens, sons, etc.), auto aprendizado entre outras. 3. DESENVOLVIMENTO DA IA A IA não é recente. Sua história inicia-se nos idos de 1940, com uma pesquisa em torno de sequências de estratégia e da análise do funcionamento do cérebro humano com o objetivo de formalizar o seu comportamento e, para tal, procurava-se entender o mecanismo de aprender e de pensar do cérebro para, então, construir meios capazes de reproduzi-lo . Esses dois ramos de pesquisa, sequência de estratégia e análise de funcionamento, eram dissociados entre si, sem nenhuma preocupação com a construção de uma Inteligência Artificial. Buscavam, apenas, novas alternativas de utilização do computador, ainda em projeto. Com o passar dos anos, foram sendo distinguidas duas linhas de pesquisa: uma biológica, calçada em torno do funcionamento do cérebro e dos neurônios e outra, a psicológica, fruto do estudo da cognição e do raciocínio. Durante a Segunda Guerra Mundial, foi desenvolvida uma “arma” que, apesar de não ser capaz de matar por seus próprios recursos, possibilitou a vitória aliada. Essa máquina, um protótipo de um computador, era capaz de decifrar códigos, de fazer cálculos, de computar e a sua criação possibilitou o surgimento de um outro artefato, este sim mortal, que dependia de inúmeros cálculos e de exatidão de resultados para seu funcionamento: a bomba atômica. [2] Não somente para cálculos o computador foi utilizado, mas também em outros recursos voltados 76 para a guerra: o planejamento de ações estratégicas de exércitos e de forças navais. Simulações do avanço de tropas eram possíveis informando-se as variáveis envolvidas na ação, permitindo, assim, a elaboração automática de diversas hipóteses de estratégias. Tal como um jogo de guerra, combinações de possibilidades eram simuladas. Deu-se, então, o início dos jogos por computador, utilizados também para situações mais reais além de jogos de dama e de xadrez. Eis, aí, o início da Inteligência Artificial tradicional, baseada em regras, com limitação de apenas lidar com os parâmetros já criados, ou seja, percorrendo caminhos já descritos. No entanto, só esta construção não bastava. Havia um outro ramo de pesquisas interessado na realização da representação das células nervosas do ser humano no computador, uma vez que o cérebro é formado de neurônios e é ele que realiza o processamento das informações do corpo. Essa linha de pesquisas motivou o desenvolvimento de uma formalização matemática para o neurônio, estabelecendo o “neurônio formal”. Essa formalização permitiu a realização de diversas concepções matemáticas sobre a forma de aprendizado dos neurônios, ou seja, como os neurônios armazenam informações. Isso derivou, na década seguinte, em modelos de “redes neurais artificiais”. Modelos que podem extrapolar dos caminhos já percorridos e apontar novos trajetos. Na década de 1950, houve a introdução da programação por meio de comandos de lógica, que proporcionaram um grande avanço para a elaboração de sistemas que utilizassem esquemas de raciocínio. Foi, então, possível o aperfeiçoamento do que já existia: jogos, aplicações matemáticas e simuladores. O avanço foi tanto, que nos anos 1960 houve uma euforia diante do potencial tecnológico vislumbrado. Passando à história da linha biológica, essa década foi de grande sucesso, dada a implementação do primeiro simulador de redes neurais artificiais e do primeiro neurocomputador. A partir do moRevista Pesquisa Naval, Brasília, n. 24, 2011, p. 75-81 Contribuição Especial delo matemático de MacCulloc e Pitts (1943) e da teoria de aprendizado de Donald Hebb (1949), foi possível, nessa década, a união desses conhecimentos no modelo de rede neural artificial chamado Perceptron. [5] Na linha biológica prosseguiram os desenvolvimentos de conceitos relativos às redes neurais artificiais, com o aprimoramento do modelo Perceptron e o surgimento de uma variante: o Adaline. Ambos utilizavam as mesmas ideias de rede, porém a lógica de aprendizado os diferenciava. Para a linha psicológica, do raciocínio, ocorreu a descoberta da Inteligência Artificial. Utopicamente, os pesquisadores dessa linha acreditavam ser possível realizar tarefas humanas, tais como o pensamento e a compreensão da linguagem, por meio do computador. Realmente acreditava-se ser possível a reprodução pura e simples do raciocínio humano no computador. Nesse sentido, foi tentada a interpretação da linguagem no computador, tal como compreendida pelo ser humano. No ímpeto da racionalização imposta pelo desenvolvimento de suas pesquisas, acreditaram que apenas por meio do raciocínio seria possível a interpretação da linguagem. Obviamente a linguagem humana não é fruto apenas da razão, mas de todo o aparato sensorial e lógico do ser humano. [4] Na década de 1970 houve uma redução na velocidade das pesquisas da vertente biológica, mas apesar disso, houve pesquisadores que, por outros caminhos, chegaram a novas concepções de redes neurais artificiais. Essas concepções analisavam o aprendizado de informações como sendo fruto de uma união das potencialidades de redes de neurônios interagindo entre si. Nasciam, assim, as redes neurais representadas na forma de mapas cerebrais, onde não havia o aprendizado de um neurônio, mas sim de toda uma rede, por intermédio do compartilhamento de recursos. Já na linha psicológica, estudos mais aprofundados demonstraram o óbvio: que não seria possíRevista Pesquisa Naval, Brasília, n. 24, 2011, p. 75-81 vel a representação, numa máquina, dos estados mentais humanos responsáveis pelo pensamento, ao menos naquele estado da tecnologia. A saída para essa linha de desenvolvimento era dada por uma empresa: a Rand Corporation. Foi da sua equipe de pesquisa que partiram os sistemas especialistas, os quais foram responsáveis pela ampliação da Inteligência Artificial Tradicional. [4] As redes neurais artificiais tiveram seu reconhecimento recuperado por intermédio do físico Jonh Hopfield, que em 1982 provou ser possível a simulação de um sistema físico por meio de um modelo matemático baseado na teoria das redes neurais. [5] Assim, em 1986, especialistas das mais diversas áreas reuniram-se para validar as pesquisas em torno das redes neurais, possibilitando, então, a volta da pesquisa nessa linha. Uma das formas de recuperação do prestígio das redes neurais foi a proposta de um modelo, chamado Backpropagation, que ampliava o potencial do Perceptron de modo a permitir a superação das limitações do modelo primitivo. [5] Enquanto isso, na IA tradicional, ampliavam-se as técnicas e as aplicações dos sistemas especialistas. Além disso, houve o interesse de trabalho conjunto com outras áreas, tais como interfaces inteligentes, sistemas de apoio à decisão, controle de robôs, etc. Nos idos de 1990 as redes neurais tiveram uma explosão exponencial de aplicações e de desenvolvimento de modelos. A cada ano foram centenas de propostas de novos modelos ou de aperfeiçoamento dos já existentes, tal o interesse pela área. A partir daí consolidaram-se as redes neurais como parte integrante do estudo da IA propriamente dita e, ainda, estabelece-se o reconhecimento dos paradigmas biológico e psicológico como complementares e necessários para sistemas mais evoluídos. 77 Dilson Godoi Espenchitt Dessa forma começam a ser construídos, ainda na década de 1990, os chamados Sistemas Híbridos, resultantes da união das concepções das duas linhas de pesquisa, permitindo, assim, a construção de grandes sistemas que pretendiam abranger uma forma mais completa de representação do comportamento humano, ideal este, da própria IA. Atualmente, a IA é estudada num campo de estudos multidisciplinar abrangendo a Computação, a Engenharia, a Psicologia, a Biologia, a Matemática e a Cibernética e buscando construir sistemas que apresentem comportamento inteligente e que desempenhem tarefas com um grau de competência equivalente ou superior ao grau com que um especialista humano as desempenharia. Portanto, pode-se afirmar que o campo de IA tem como objetivo o contínuo aumento da “inteligência” do computador, pesquisando, para isso, também, os fenômenos da inteligência natural. Para esse fim, IA é definida, aqui, como uma coleção de técnicas suportadas por computador, de modo que seja possível emular algumas capacidades dos seres humanos. 4. OBJETIVOS DA IA Pode-se dizer que a grande atividade de IA é a solução de problemas, usando o conhecimento e manipulando-o e a variedade dos problemas tratados por ela é tão grande que se torna difícil limitá-los. Seria mais fácil e mais preciso definir o escopo de IA considerando-se as atividades realizadas pela comunidade de IA, mas essa definição recursiva seria insatisfatória no uso de senso comum, portanto, em lugar de uma definição é aplicável uma explicação informal. De modo simplista, são do domínio da IA, as tarefas humanas relativas à aquisição de informações (sentidos), processamento de informações (pensamento) e ações no meio exterior. 78 O conceito de IA varia com o tempo e com o contexto. Como fazê-lo? • Simulando a inteligência humana em situações pré-determinadas; • criando mecanismos que apresentem comportamento inteligente e • reproduzindo a inteligência humana em um ambiente computacional. Embora as aplicações da IA sejam muito mais limitadas do que a inteligência humana, elas são de grande interesse para o homem pelas seguintes razões: • preservar o conhecimento em uma especialidade que pode ser perdida pela ausência ou pela morte do especialista humano; • armazenar informações de forma ativa (criar uma base de conhecimento) que muitos membros de uma organização possam examinar, como um livro texto ou um manual; • criar um mecanismo que não se sujeitará a sentimentos humanos tais como fadiga e pressa. Isto pode ser especialmente útil quando os trabalhos são ambiental, física e mentalmente perigosos para o homem; • eliminar trabalhos rotineiros e insatisfatórios para as pessoas e • avançar a base de conhecimento da organização ao sugerir soluções para problemas específicos, que são muito intensos e complexos, para serem analisados pelo homem em um curto período de tempo. Quais são as limitações da aplicação da IA até o momento? • Conhecimento restrito dos profissionais em computação de IA; Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 75-81 Contribuição Especial • preconceito de uso da IA para a solução de problemas práticos; • limitado número de ferramentas que permitem a integração das facilidades de um programa de apoio a bancos de dados relacionais e • limitação dos computadores. A maior parte das limitações ao uso da IA está ligada, de forma direta ou indireta, ao custo financeiro das suas ferramentas. É evidente que o investimento técnico em aprimoramento humano que gere as melhorias técnicas necessárias envolvem o custo destes insumos, no entanto, é de crucial importância que estes custos sejam avaliados sempre em relação aos benefícios que podem criar, não só da geração de conhecimento mas da redução de gastos em outras áreas, além de benefícios secundários. 5. A IA E O SEU USO NA MB Dentre as aplicações diretas da IA em atividades da MB, a que mais rapidamente nos vem à mente é o adestramento. Podem-se usar duas formas para adestramento: a primeira, baseada em simulação com casos reais e a segunda, por simulação de situações não catalogadas. • Para treinamento de indivíduos e grupos pode-se usar a técnica de aprendizado baseado em casos. O propósito é aplicar soluções já testadas no problema a ser resolvido, onde a aquisição de conhecimento é feita a partir da exploração de situações em uma grande biblioteca de experiências passadas. O enfoque é fazer com que os alunos expostos a situações do banco de experiências tomem as suas próprias decisões, não sendo meros aplicadores de regras pré-estabelecidas, mas que busquem analogias, aplicando-as e tentando explicar suas próprias regras de decisão e • o aprendizado baseado em simulação é aquele em que a aquisição de conhecimento é feita a partir de criação de modelos dinâmicos do munRevista Pesquisa Naval, Brasília, n. 24, 2011, p. 75-81 do real. Esses modelos permitem a exploração de situações difíceis, custosas e até mesmo impossíveis de acontecerem. A simulação permite desenvolver hipóteses, testá-las e analisar seus resultados para refinar conceitos. Além do adestramento, uma outra a aplicação da IA na MB é o planejamento. Ainda baseado em técnicas de casos e simuladores, e analisando seus dados, pode-se efetuar o planejamento na exploração de situações de uma grande biblioteca de dados e simular estas situações. Após a realização do planejamento pode-se testá-lo em simuladores e analisar seus resultados, o que permite uma reavaliação e os ajustes pertinentes. Dessa forma, sem usar meios onerosos, grandes perdas de tempo ou tentativas múltiplas, solucionam-se alguns problemas práticos sem risco de gasto desnecessário de verbas. Outra aplicação seria no teatro de operações onde Sistemas de Apoio à Decisão (SAD), usando agentes inteligentes, pode efetuar buscas em bancos de dados cada vez maiores, processar os resultados, simular as diversas alternativas, buscar cenários que possibilitem à Inteligência Humana receber os dados essenciais ao seu processo decisório e apresentar alternativas para a decisão. É importante que os dados aportados pela máquina encontrem eco na experiência do decisor final. O uso de SAD torna possível ao Comandante avaliar os diversos panoramas propostos e tomar sua decisão de forma oportuna, apesar da grande massa de informações presentes na Guerra Moderna e do pouco tempo para processá-las. Hoje em dia, o Instituto de Pesquisa da Marinha (IPqM) já apresenta estudos vislumbrando a utilização da IA, tanto em hardware como em software, no desenvolvimento de alguns de seus projetos. São, esses projetos, ligados à assinatura acústica de embarcações, que podem “treinar” sonares inteligentes para reconhecê-las, à fabricação de “minas inteligentes” que reconhecendo a assinatura magnética das embarcações atuarão em seus 79 Dilson Godoi Espenchitt alvos e a sistemas de simulação tática e de treinamento. gastos devem ser considerados investimentos, de alto retorno, inclusive geradores de economia. É importante que esses estudos tenham sucesso, utilizando-se de sistemas da IA, em projetos de adestramento, planejamento e apoio à decisão, tornando-os, desta forma, mais alinhados com as tecnologias utilizadas nos países mais desenvolvidos e dotando a MB com ferramentas cada vez mais modernas. A Marinha, como um centro de excelência em IA, estará mais capacitada a servir o país de forma mais coerente com o seu papel na dinâmica mundial. Como centro de referência será portanto, fornecedor de tecnologia para outros órgãos governamentais ou para a iniciativa privada, gerando melhoria contínua na administração pública bem como fonte de recursos financeiros alternativos. Outras organizações da Marinha, como o Centro de Análises de Sistemas Navais (CASNAV), vem, usando a tecnologia de IA, desenvolvendo simuladores, cada dia mais alinhados com a realidade que os homens encontram no mar. Com simuladores modernos, que tem como entrada de dados parâmetros dos sistemas de armas, condições do mar e meteorológicas e outras variáveis, pode-se traçar a curva de desempenho de um sistema sem usar nenhum dia de mar ou sem disparar um único tiro. Isso é possível por meio da reprodução virtual de uma infinidade de tiros, variando-se as condições de realização dos mesmos. Podem-se simular diversas condições ambientais e com isto testar-se a performance de sonares e de radares bem como utilizar esses cenários virtuais para treinar os usuários desses equipamentos. Apesar de todos os exemplos aqui apresentados, devemos esclarecer que se trata- ainda de esforços incipientes se levarmos em consideração o potencial desta tecnologia e as utilizações que hoje já são feitas em diversas partes do mundo. Para que se aprofunde nesse potencial, devemos ter uma linha de maior capacitação dos técnicos hoje existentes, ou mesmo a captura de cérebros treinados nas universidades e nas empresas, bem como um maior investimento no parque tecnológico hoje existente. Mesmo levando-se em consideração a atual conjuntura econômica do país e do mundo, onde recursos são contingenciados a todo momento, os 80 6. CONCLUSÃO A IA é hoje uma tecnologia com amplas aplicações na vida civil. Várias empresas, inclusive algumas que não atuam no ramo de tecnologia, estão usando a IA como suporte para treinamentos, planejamento e para apoio ao processo de decisão. Seguradoras usam simuladores para avaliar riscos e prêmios. Bancos estão usando IA para avaliar o risco de inadimplência de seus tomadores de empréstimos e, com isso, reduzir seus riscos. Operadoras de cartão de crédito avaliam o perfil de seus clientes usando ferramentas com o apoio dessa tecnologia, reduzindo dessa forma o risco de fraudes. A área médica está usando a IA para correlacionar sintomas, resultados de exames, diagnósticos, perfis profissionais e sócio culturais, sendo essas relações utilizadas para melhorar o entendimento das doenças e os seus tratamentos. A Petrobras usa esses estudos para avaliar o potencial de seus campos petrolíferos e, com isso, adequar o investimento ao retorno esperado. Assim, nada mais natural que a MB, como pioneira na área de tecnologia de ponta, também faça parte deste seleto grupo de usuários de IA no desenvolvimento das suas atividades. Deve-se ter em mente que o uso de simuladores tem como objetivo tornar o usuário familiarizado com os recursos dos sistemas que irá usar, mas não irá substituir a ida para o mar. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 75-81 Contribuição Especial É importante ressaltar que os sistemas de apoio à decisão fornecem elementos para que a decisão seja tomada, mas a inteligência humana continua suprema no processo decisório, ou seja, a máquina sempre é secundária à experiência cognitiva humana, o que significa subordinar a Inteligência Artificial à Inteligência Humana, que a criou. REFERÊNCIAS 1. ANDRIOLE, Stephen J. Artificial Intelligence and National Defense. Washington: AFCEA Internacional Press, 1987. 2. BITTENCOURT, Guilherme. Inteligência Artificial Ferramentas e Teorias. Florianópolis: Ed da UFSC, 1998. 3. BRASIL. Escola de Guerra Naval. EGN - 320. Guia para a Elaboração de Trabalhos Acadêmicos. Rio de Janeiro, 2004. 4. CARVALHO, Luís A. Vidal. Datamining. São Paulo: Érica, 2001. 5. HAYKIN, Simon. Neural Networks – A Comprehensive Foundation. 2 nd ed. Toronto: Macmilan College Publishing Company, 1999. 6. MISHKOFF, Henry C. Undertanding Artificial Intelligence. Indianapolis: Howard W. Sams & Co, 1985. Revista Pesquisa Naval, Brasília, n. 24, 2011, p. 75-81 81 NORMAS PARA SUBMISSÃO E PUBLICAÇÃO DE ARTIGOS NA REVISTA PESQUISA NAVAL 1 - OBJETIVO A Revista Pesquisa Naval (RPN) é um periódico científico de publicação anual que apresenta à comunidade científica uma coletânea de estudos desenvolvidos por pesquisadores das áreas científica, tecnológica e de inovação, cujos temas sejam pertinentes às áreas de interesse da Marinha do Brasil (MB). O periódico é publicado pela Secretaria de Ciência, Tecnologia e Inovação da Marinha (SecCTM) e avaliado pelo Sistema de Classificação de Periódicos, Anais, Revistas e Jornais (QUALIS) da Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES) nas seguintes categorias: “B4”, nas áreas de avaliação Engenharia II, Engenharia III e Interdisciplinar; “B5”, nas áreas de avaliação Engenharia IV e Geociências; e “C”, na área de Química. 2 - CORPO EDITORIAL A administração da RPN será conduzida pelo Corpo Editorial composto pelo Editor-Chefe, Editores-Adjuntos, Conselho Editorial e pela Comissão Editorial, sendo: Editor-Chefe: Secretário de Ciência, Tecnologia e Inovação da Marinha. Editores-Adjuntos: Diretor do Instituto de Pesquisa da Marinha – IPqM; Diretor do Centro de Análise e Sistemas Navais – CASNAV e Diretor do Instituto de Estudos do Mar Almirante Paulo Moreira – IEAPM. Conselho Editorial (com os seguintes elementos organizacionais da SecCTM): Presidente: Subsecretário de Relações Institucionais. Membros: Encarregado da Divisão de Parcerias Estratégicas; Encarregado da Divisão de Tecnologia Industrial Básica; Ajudante da Divisão de Parcerias Estratégicas e Auxiliar da Divisão de Parcerias Estratégicas. Comissão Editorial: Membros da comunidade científica, requisitados “ad hoc”, que farão a avaliação dos artigos em submissão, observados os critérios de avaliação elaborados pelo Conselho Editorial e aprovados pelo Editor-Chefe da RPN. 3 - NORMAS EDITORIAIS 3.1 - Características Gerais 3.1.1 - A submissão de artigos é aberta a pesquisadores, pertencentes ou não à Marinha do Brasil (MB), que apresentem trabalhos inéditos sobre os seus estudos, isto é, não publicados em quaisquer revistas ou periódicos, e cujos temas sejam, prioritariamente, pertinentes às áreas de interesse do Sistema de Ciência, Tecnologia e Inovação da Marinha (SCTMB), abaixo discriminadas: a) Área de Sistemas de Armas e Munições: Compreende a capacitação para pesquisar, projetar, desenvolver protótipos e avaliar sistemas de armas e seus componentes 82 (hardware), controle de armas (software), armamento de pequeno e médio calibre e munições, necessários às Operações Navais. b) Área do Ambiente Operacional: Compreende a capacitação para pesquisar, projetar, desenvolver e inovar modelos, métodos, sistemas, equipamentos, materiais e técnicas que permitam a produção de informações e a ampliação do conhecimento sobre os ambientes oceânico, costeiro, fluvial e lacustre, necessários às Operações Navais. c) Área de Processos Decisórios: Compreende a capacitação para pesquisar, projetar, desenvolver protótipos e inovar modelos, métodos, sistemas e técnicas que permitam a produção de informações e a ampliação do conhecimento sobre os processos decisórios, estratégicos, operacionais, gerenciais e de apoio, necessários às Operações Navais. d) Área de Sensores, Guerra Eletrônica e Guerra Acústica: Compreende a capacitação para estudar, pesquisar, projetar, desenvolver protótipos e inovar sistemas de detecção, de discrição e de contramedidas necessários às Operações Navais. e) Área de Desempenho Humano e Saúde: Compreende a capacitação de estudar, pesquisar, modelar, projetar e desenvolver protótipos, ampliando o conhecimento biomédico, farmacotécnico, psicológico, da bioengenharia e da ergonomia, visando a aumentar a capacidade de desempenho, de resistência a situações de pressão e de proteção da saúde do homem quando em combate e dos recursos de treinamento por simuladores, de interesse da Marinha. f) Área de Materiais Especiais: Compreende a capacitação de estudar, pesquisar, projetar e desenvolver protótipos e experimentos de materiais para dificultar a detecção de plataformas, para absorção de energia e proteção e detecção NBQ, para processos especiais de soldagem, para emprego na área nuclear, materiais resistentes à abrasão, ao impacto balístico e de materiais energéticos, ou ainda, materiais que possuam outras características físico-químicas especiais que sejam de interesse da Marinha. g) Área de Energia: Compreende a capacitação de estudar, pesquisar, modelar, projetar e desenvolver protótipos e experimentos envolvendo sistemas de geração, exceto nuclear, de acumulação e de distribuição de energia e sistemas de propulsão de interesse da Marinha. h) Área de Arquitetura Naval e Plataformas: Compreende a capacitação de estudar, pesquisar, projetar, simular e desenvolver protótipos, modelos e experimentos de plataformas navais, anfíbias, terrestres e aéreas, visando à previsão do seu comportamento nas diversas condições do meio ambiente onde atuarão, da configuração de seus sensores e armas e da configuração de seus sistemas de propulsão e governo, necessários às Operações Navais. i) Área de Cibernética (Tecnologia da Informação) e Comunicações: Esta área compreende dois segmentos: a cibernética (tecnologia da informação) e a tecnologia das comunicações, antes tratadas de forma isolada e atualmente abordadas de forma integrada, considerando a convergência de suas respectivas tecnologias. O segmento da cibernética, com ênfase na tecnologia da informação, compreende a capacitação de estudar, pesquisar, projetar, simular e desenvolver protótipos, modelos e experimentos, visando ao desenvolvimento e à qualidade do software, à topologia das redes de computadores, à criptologia e às medidas de apoio à guerra cibernética de interesse da Marinha. O segmento da tecnologia da comunicação compreende a capacitação de estudar, pesquisar, projetar, simular e desenvolver protótipos, modelos e experimentos visando à comunicação de dados e/ou voz e à avaliação de desempenho das comunicações. j) Área de Nanotecnologia: Compreende a capacitação de estudar, pesquisar, projetar, modelar, simular e desenvolver protótipos e experimentos envolvendo a engenharia do átomo, que leve à criação de elementos, substâncias e materiais inexistentes na natureza e que atendam a necessidades específicas de interesse da Marinha. k) Área Nuclear: Compreende a capacitação de estudar, pesquisar, projetar, modelar, simular e desenvolver protótipos e experimentos envolvendo as atividades afetas ao ciclo do combustível nuclear e a geração de energia nuclear para propulsão naval de interesse da Marinha. 3.1.2 - Os artigos devem ser submetidos por meio do Sistema Eletrônico de Editoração de Revista (SEER), no endereço da Internet: http://www.secctm.mar.mil.br/revpesqnav/ojs/index.php/rpn/ about/submissions. 3.1.3 - Quando da submissão, será solicitado ao autor que enquadre o artigo em uma das áreas de interesse do SCTMB, discriminadas no item 3.1.1. O Conselho Editorial, sempre que julgar necessário, poderá alterar essa indicação. 3.1.4 - Os autores dos artigos em submissão deverão acompanhar o andamento do processo de seleção na página da Revista e efetuar as solicitações indicadas no sistema, com a máxima brevidade. 3.1.5 - O Português é o idioma oficial da RPN. Em caráter excepcional, por decisão do Conselho Editorial, poderão ser aceitos trabalhos em outro idioma. 3.1.6 - O artigo em submissão não poderá ser submetido para publicação em outras revistas, simultaneamente com a RPN, implicando em cancelamento da submissão. 3.1.7 - O número de artigos para publicação, por edição, será limitado a um por autor. 3.1.8 - Os artigos originais serão submetidos à avaliação da Comissão Editorial, sem qualquer identificação de autoria, garantindo que sejam preservados o critério de sigilo do autor e a isenção na submissão para avaliação por pares. 3.1.9 - O Conselho Editorial da RPN selecionará os artigos a serem publicados, avaliando o cumprimento das Normas para Submissão de Artigos Científicos à RPN, bem como os pareceres apresentados pela Comissão Editorial. 3.1.10 - No caso de haver número de artigos maior do que o comportado pela edição, os excedentes poderão ser reservados para publicação nas edições subsequentes, mediante autorização formal dos autores. 3.1.11 - Após aprovação do artigo em submissão, os autores serão comunicados formalmente e encaminharão ao Conselho Editorial a “Declaração de Responsabilidade e Cessão dos Direitos de Autor para Publicação de artigo na RPN”, conforme anexo. No caso de autoria múltipla, a declaração poderá ser assinada apenas pelo autor responsável pela submissão do artigo, o qual se responsabilizará pelos demais. 3.1.12 - A revisão gramatical e a obediência às normas de referência, citadas no item 3.2.14, deverão ser obrigatoriamente providenciadas pelo autor do trabalho, antes de sua submissão. Entretanto, no intuito de zelar pelo padrão culto da língua portuguesa, o Conselho Editorial da RPN se reserva ao direito de efetuar, nos originais, alterações de ordem normativa, ortográfica e gramatical, respeitando, porém, o estilo dos autores. A versão final será enviada aos autores para a devida ratificação. 3.1.13 - A versão final do artigo será adequada ao padrão de formatação gráfico da revista. Não serão fornecidas separatas. Os artigos estarão disponíveis, no formato “pdf ”, no endereço eletrônico da revista, bem como o previsto no item 4.2. 3.1.14 - Os autores dos artigos publicados não perceberão qualquer tipo de remuneração ou pró-labore. 3.1.15 - A RPN fica autorizada, em caráter de exclusividade, a publicar os artigos indicados na “Declaração de Responsabilidade e Cessão dos Direitos de Autor para Publicação de artigo na Revista Pesquisa Naval”, encaminhado de acordo com o item 3.1.11, pelo prazo e nas condições ali estabelecidas. 3.1.16 - Os trabalhos publicados passam a ser propriedade da RPN, sendo permitida a reprodução parcial ou total dos trabalhos, desde que a fonte seja citada. 3.1.17 - Os artigos publicados, bem como as opiniões emitidas nesses artigos, são de exclusiva responsabilidade do(s) autor(es). 3.2 - Características Técnicas 3.2.1 - Os artigos serão submetidos ao Conselho Editorial, conforme item 3.1.2, em arquivo eletrônico gravado na extensão “RTF” (Rich Text Format) e com tamanho máximo de 2MB. Formato: a) margens: superior e esquerda 3 cm; direita e inferior de 2 cm e b) papel A4 (21cm X 29,7cm). 3.2.2 - A estrutura dos artigos conterá as seguintes seções, na sequência indicada: (1) Título (português e inglês); (2) Identificação dos Autores; (3) Resumo; (4) Palavras-chave; (5) Abstract; (6) Keywords; (7) Introdução; 83 (8) Metodologia de Pesquisa; (9) Resultados; (10) Discussão; (11) Conclusões e (12) Referências. Todas as seções e subseções, a partir da Introdução, serão numeradas com algarismos arábicos. Permite-se a omissão da Seção (8) e a fusão das Seções (9) e (10), quando a natureza do trabalho assim o recomendar. 3.2.3 - Tamanho: a extensão máxima do artigo será de 20 laudas, incluindo os elementos pré-textuais, texto e pós-textuais. Uma lauda é uma página com 1.250 caracteres. 3.2.4 - Título: será breve e suficientemente específico e descritivo, contendo as palavras-chave que representem o conteúdo do texto, acompanhado de sua tradução para o idioma inglês. Formato: fonte Times New Roman, tamanho 14, em negrito, letras maiúsculas e minúsculas e parágrafo centralizado, com efeito itálico para o título em inglês. 3.2.5 - Identificação dos autores: deverá constar o nome completo de cada autor, seguido do título profissional e titulação acadêmica, informação completa sobre a afiliação do autor (incluindo instituição de origem, vínculo funcional, cidade, estado e país) e o endereço eletrônico para contato. Formato: espaçamento entre linhas simples, fonte Times New Roman, tamanho 10, letras maiúsculas e minúsculas e parágrafo centralizado. Aplicar o efeito negrito somente para o nome do autor. 3.2.6 - Resumo/Abstract: o resumo elaborado será de caráter informativo, com o máximo de 150 palavras, ressaltando o objetivo, o método, os resultados e as conclusões. O abstract será a tradução integral do resumo para o inglês. Formato: espaçamento entre linhas simples, fonte Times New Roman, tamanho 12, com efeito itálico para o Abstract, e parágrafo justificado. 3.2.7 - Palavras-chave/Keywords: as palavras-chave deverão ser separadas por ponto. As keywords serão a tradução integral das palavras-chave para o inglês. Formato: espaçamento entre linhas simples, fonte Times New Roman, tamanho 12, com efeito itálico para as keywords, letras maiúsculas e minúsculas e parágrafo justificado. 3.2.8 - Texto (seções 7 a 9, definidas no item 3.2.2): a) fonte Times New Roman, tamanho 12; b) espaçamento entre linhas de 1,5; c) uma coluna e d) parágrafo justificado. 3.2.9 - Notas explicativas: notas contidas no artigo deverão ser evitadas. Quando possível, os textos com essas características serão incorporados aos elementos textuais. 3.2.10 - Agradecimentos: se for o caso, deverão ser mencionados no final do trabalho, antecedendo as referências. Formato: espaçamento entre linhas de 1,5, fonte Times New Roman, tamanho 12, letras maiúsculas e minúsculas e parágrafo justificado. 84 3.2.11 - Referências: serão apresentadas em ordem alfabética no final do artigo, de acordo com a norma da ABNT - NBR6023/2002. Todas as referências deverão ser citadas no texto de acordo com o sistema alfabético (autor-data). Formato: espaçamento entre linhas simples, fonte Times New Roman, tamanho 12 e parágrafo justificado. 3.2.12 - Figuras, tabelas ou ilustrações: deverão conter legendas e ser assinalados, no texto, pelo seu número de ordem. Se as ilustrações utilizadas já tiverem sido publicadas, mencionar os créditos ou fonte de consulta. É imprescindível que a imagem esteja com, no mínimo, 300 DPIs. Formato: As legendas ou fonte de consulta estarão em fonte Times New Roman, tamanho 10 e parágrafo centralizado. 3.2.13 - Com o propósito de atender ao item 3.1.8, os elementos textuais do artigo não poderão conter qualquer forma de identificação do(s) autor(es). 3.2.14 - Para aspectos gerais de apresentação, referências bibliográficas, citações, notas e demais detalhes, serão observadas as seguintes normas: a) ABNT – NBR 6021/2003 – publicação periódica científica impressa; b) ABNT – NBR 6022/2003 – artigo em publicação periódica científica impressa; c) ABNT – NBR 6023/2002 – referências; d) ABNT – NBR 6024/2003 – numeração progressiva; e) ABNT – NBR 6027/2003 – sumário; f) ABNT – NBR 6028/2003 – resumo; g) ABNT – NBR 10520/2002 – citações e h) Apresentação tabular do Instituto Brasileiro de Geografia e Estatística – IBGE. 4 - CONSIDERAÇÕES FINAIS 4.1 - O(s) autor(es) do(s) artigo(s) em submissão será(ão) oportunamente informado(s) sobre o seu andamento, por E-mail, até a publicação do mesmo na RPN. 4.2 - É de direito do(s) autor(es) o recebimento de três exemplares da edição que consta a publicação de seu(s) artigo(s), cabendo ao Conselho Editorial da RPN a responsabilidade do envio aos autores. 4.3 - Qualquer solicitação de informações adicionais deverá ser encaminhada à: Secretaria de Ciência, Tecnologia e Inovação da Marinha Subsecretaria de Relações Institucionais Conselho Editorial da Revista Pesquisa Naval Esplanada dos Ministérios, Bloco “N”, 4º andar CEP: 70055-900 – Brasília/DF E-mail: [email protected] Tel./Fax: (61) 3429-1948. ANEXO DECLARAÇÃO DE RESPONSABILIDADE E DE CESSÃO DOS DIREITOS DE AUTOR PARA PUBLICAÇÃO DE ARTIGO NA REVISTA PESQUISA NAVAL Ao Presidente do Conselho Editorial da Revista Pesquisa Naval Secretaria de Ciência, Tecnologia e Inovação da Marinha Esplanada dos Ministérios, Bloco “N”, 4º andar 70055-900 – Brasília – DF Assunto: Declaração de Responsabilidade e de Cessão dos Direitos de Autor para publicação de artigo na Revista Pesquisa Naval. Declaro(amos) que o artigo intitulado “___________________________________”, enviado à Revista Pesquisa Naval, periódico científico da Secretaria de Ciência, Tecnologia e Inovação da Marinha, é um artigo inédito e o seu conteúdo não está sendo considerado para publicação em outras revistas, seja no formato impresso seja no eletrônico. Certifico(amos) que participei(amos) suficientemente da elaboração do artigo para tornar pública minha (nossa) responsabilidade pelo seu conteúdo. Cedo(emos), com exclusividade, a título gratuito e pelo período de dois anos, os direitos autorais patrimoniais do artigo supracitado à Secretaria de Ciência, Tecnologia e Inovação da Marinha, para publicação na ____ª edição da Revista Pesquisa Naval, a qual poderá ser em formato impresso ou em formato eletrônico, neste último caso para disponibilização na página Internet da RPN. Aceito(amos) as condições deste termo. (todos os autores) Local, em _______de ______de 20__. Assinatura do(s) autor(es) (nome completo, CPF, RG/Órgão Expedidor, cargo/profissão, instituição onde trabalha, endereço funcional) 85 SECRETARIA DE CIÊNCIA, TECNOLOGIA E INOVAÇÃO DA MARINHA 86
Download