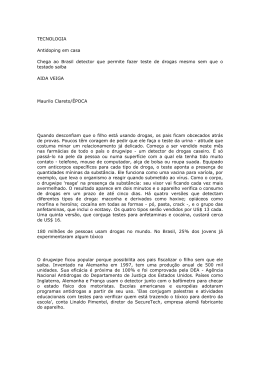
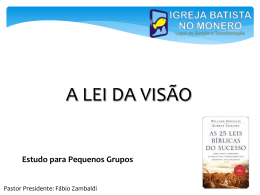
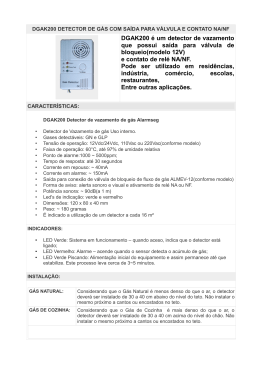
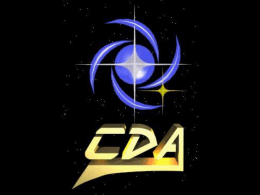
Relatório de Estágio 2. Tomografia por Emissão de Positrões (PET) 22 2.4.2. Formatos de dados O armazenamento das coincidências detectadas num sistema PET pode ser feito em dois formatos diferentes, o formato de list-mode e o de histograma [Defrise 1998]. No primeiro, os dados são registados sob a forma de uma lista sequencial de eventos, onde em cada entrada se inscreve um conjunto de informações sobre cada coincidência, como por exemplo os índices dos dois cristais em coincidência de acordo com a enumeração de cristais definida para o detector, a energia dos dois fotões incidentes ou o instante em que a coincidência foi detectada. No segundo, os dados são reunidos num histograma11 no qual todas as LORs possíveis estão mapeadas, uma por cada elemento desse histograma; o valor inteiro que o elemento toma é o número total de coincidências registadas na LOR correspondente. Normalmente, o formato preferencial de armazenamento de dados é o de histograma porque é o mais adequado para os algoritmos de reconstrução de imagem. Muitos sistemas possuem ferramentas de conversão do formato list-mode para o formato de histograma, conversão essa facilmente feita conhecidas as características físicas do detector, nomeadamente no que toca à posição de cada cristal. No entanto, o formato list-mode tem um conteúdo de informação maior e que pode ser importante para a correcção de efeitos que prejudicam a imagem, como a ocorrência de coincidências dispersas. Adicionalmente, é o formato mais flexível, pois ao contrário do formato de histograma, não depende rigidamente do conjunto de LORs que se definiram como “possíveis” para o sistema, nem da discretização do espaço imposta por essas LORs, para além de ser o mais compacto para o armazenamento de dados 3D. Por essa razão, quase todos os sistemas com capacidade de aquisição no modo 3D fazem-no no formato list-mode, convertendo posteriormente os dados para o formato de histograma [Defrise 1998]. 2.4.3. Sinogramas no modo 2D A estrutura de dados com o formato de histograma utilizada para aquisições no modo 2D é o sinograma, que consiste num histograma bidimensional das coincidências registadas segundo LORs contidas num determinado plano paralelo aos anéis do detector. Os dois índices de cada elemento do sinograma definem a orientação espacial no plano da LOR correspondente a esse elemento, de acordo com a coordenada radial xr e o ângulo azimutal φ indicados na figura 2.14a. Estes são definidos à custa de um sistema de eixos OXrYr obtido pela rotação no sentido negativo segundo o ângulo φ ∈ [0; π[ do sistema OXY solidário com o detector, onde O se encontra no eixo do detector e X e Y são 11 Por histograma entendemos aqui uma matriz multidimensional (de duas ou mais dimensões) de coeficientes inteiros. Cada coeficiente é rotulado por um índice em cada uma das dimensões da matriz. Relatório de Estágio 2. Tomografia por Emissão de Positrões (PET) 23 respectivamente as direcções horizontal e vertical (figuras 2.14a e 2.14b)12. Um eixo adicional Z permite atribuir uma coordenada axial z a cada sinograma, localizando-o segundo o eixo do detector (fig. 2.14b). A compilação dos sinogramas 2D de um objecto é feita numa matriz tridimensional s2D(xr,φ,z) que guarda todos os sinogramas relativos a todos os planos de aquisição em 2D. y yr φ x xr xr (a) (b) Figura 2.14: (a) Definição das coordenadas xr e φ de uma LOR (indicada a vermelho) em função do sistema OXrYr definido por rotação do sistema OXY solidário com o detector, e respectiva localização no sinograma. (b) Orientação do sistema XYZ solidário com o detector. Os planos XY, YZ e XZ são normalmente referidos como planos transaxiais, sagitais e coronais. (adaptado de [Badawi 1998]) De acordo com a definição de sinograma, cada linha agrupa LORs paralelas entre si que fazem um ângulo φ com a horizontal, enquanto que cada coluna agrupa LORs com a mesma posição radial xr, i.e. que são tangentes a uma circunferência centrada em O com raio xr (fig. 2.15a). Note-se que o intervalo de posições radiais registado em cada linha do sinograma abrange o diâmetro do FOV (o dobro do raio do FOV, ou seja 2×RFOV), que em geral é inferior ao diâmetro do detector (ver fig. 2.15a), implicando que as LORs mais afastadas do centro do detector não são utilizadas. Formalmente, o sinograma é a transformada de Radon bidimensional de um objecto, e o seu nome deriva do facto de uma fonte de positrões pontual produzir em geral um padrão sinusoidal no sinograma (fig. 2.15b; ver também anexo A). A organização dos dados em sinogramas no modo 2D é especialmente adequada para a tarefa de reconstrução de imagem, dado que cada entrada do sinograma guarda o número de coincidências detectadas na LOR respectiva que, na ausência de efeitos como a dispersão de Compton ou a absorção dos fotões de aniquilação pelo volume do paciente, é proporcional à actividade do marcador PET ao longo dessa LOR. Deste modo, pode considerar-se cada linha do sinograma como sendo o conjunto das projecções paralelas da Existem convenções diferentes para definir o ângulo φ; aqui, tomamos a mais comum em PET, i.e., que é o ângulo formado com a vertical (eixo OY) medido no sentido negativo. 12 Relatório de Estágio 2. Tomografia por Emissão de Positrões (PET) 24 actividade (ou simplesmente a projecção da actividade) do objecto segundo a direcção φ no plano z, p2D(xr,φ,z) (fig. 2.16), ou seja p2D ( xr , φ , z) = s2D ( xr ,φ , z ) . (3) φ π φ φ xr xr 0 -RFOV xr +RFOV xr (a) xA xB xA xr xB xr (b) Figura 2.15: (a) Esquema representativo das LORs agrupadas num sinograma em cada linha (cima) e em cada coluna (baixo). Na figura de cima, indicam-se a tracejado as LORs que se encontram fora do FOV, e que por isso não são utilizadas na construção do sinograma. (adaptado de [Badawi 1998]) (b) Sinograma gerado por uma fonte pontual colocada no centro do FOV (A) e num ponto fora do centro (B). Em função de φ, o sinograma descreve meia sinusóide com amplitude igual à distância a que cada fonte se encontra do centro do FOV. (adaptado de [Ferreira 2001]) φ xr Figura 2.16: Relação entre as linhas de um sinograma e a projecção da actividade do objecto segundo a direcção φ no plano z. Relatório de Estágio 2. Tomografia por Emissão de Positrões (PET) 25 O conjunto das projecções da actividade segundo todas as direcções possíveis num plano constitui a informação necessária que permite reconstruir a imagem nesse plano. O resultado final do processo de reconstrução é a colecção de todos os planos reconstruídos (que, como veremos em 2.4.6, são 2N-1 no modo 2D, onde N é o número de anéis do detector), cujo empilhamento segundo o eixo Z gera o volume da imagem final. 2.4.4. Sinogramas no modo 3D No modo 3D também se usam sinogramas para o armazenamento dos dados no formato de histograma, mas que incluem a contagem de coincidências em LORs definidas por cristais localizados em anéis afastados. Assim, para além dos planos paralelos aos anéis do detector definidos no modo 2D, no modo 3D constroem-se também sinogramas relativos a planos oblíquos relativamente aos anéis do detector. Cada sinograma oblíquo regista as coincidências em todas as LORs definidas entre dois anéis diferentes do detector (fig. 2.17); num sistema com N anéis, pode-se construir um máximo de N2 sinogramas para uma aquisição 3D, por oposição aos 2N-1 sinogramas do modo 2D (ver 2.4.6). É então necessário no modo 3D especificar não só a posição do sinograma segundo o eixo Z do detector, mas também a sua inclinação relativamente ao eixo; esta última é usualmente dada em termos da diferença entre os dois anéis em coincidência, ∆r = r2 – r1, onde r é um inteiro que enumera a posição do anel no eixo do detector (fig. 2.17). A coordenada axial z desse plano é a posição média dos dois anéis, sendo dada por z= r1 + r2 ∆d Z . 2 (4) onde ∆dZ é a largura de cada anel. De forma semelhante ao que acontece para o modo 2D, os sinogramas 3D de um objecto são agrupados numa matriz s3D(xr,φ,z,∆r), agora quadridimensional, que contém todos os sinogramas adquiridos, oblíquos e não oblíquos. A organização dos sinogramas em função de ∆r e z será referida em maior detalhe em 2.4.6. z r2 ∆dz ∆r = r2 – r1 r (>0 neste caso) r1 Figura 2.17: Esquema das LORs de um sinograma oblíquo, e respectiva definição dos valores de ∆r e z para esse sinograma. (adaptado de [Defrise 1998]) Relatório de Estágio 2. Tomografia por Emissão de Positrões (PET) 26 Nos sinogramas 3D, a definição das coordenadas xr e φ é feita com o auxílio de um sistema de eixos OXrYrZr rodado relativamente ao sistema OXYZ (fig. 2.14b) segundo os ângulos azimutal φ ∈ [0, π[13 e co-polar θ14 ∈ [0, π[ indicados na figura 2.18a. O ângulo copolar θ pode representar uma forma equivalente a ∆r de exprimir a inclinação do sinograma, dado que as LORs correspondentes à posição radial central para todos os ângulos azimutais (localizadas na coluna central do sinograma) fazem um ângulo π−θ com o eixo do detector (fig. 2.18b). Para um sinograma com inclinação ∆r e coordenada axial z, cada linha agrupa LORs que fazem o mesmo ângulo φ com a direcção vertical, OY, medido no plano OXY (fig. 2.18b); essas LORs não são estritamente paralelas entre si, e, à excepção da LOR central, definem um ângulo com o eixo do detector que é inferior a π−θ (i.e. são mais inclinadas do que a LOR central). z π−θ y zr φ θ yr x z xr (a) (b) Figura 2.18: (a) Definição do sistema de eixos OXrYrZr obtido por rotação do sistema OXYZ solidário com o detector segundo os ângulos azimutal φ e co-polar θ. Repare-se que enquanto que no modo 2D a direcção de cada LOR com coordenada azimutal φ é coincidente com a direcção do eixo OYr (ver fig. 2.14a), a introdução da coordemada co-polar θ no modo 3D faz com que a direcção de uma LOR com coordenadas angulares (φ,θ) passe a ser coincidente com a direcção do eixo OZr. (adaptado de [Badawi 1998]) (b) Esquema das LORs agrupadas numa linha de um sinograma com inclinação ∆r e coordenada axial z. Todas as LORs definem o mesmo ângulo φ com o eixo OX, ângulo esse medido no plano OXY; a localização dos anéis implica que essas LORs não sejam paralelas entre si, fazendo um ângulo com o eixo do detector que é decrescente à medida que se afastam do centro do FOV. (adaptado de [Defrise 1998]) O facto de cada sinograma adquirido no modo 3D não definir directamente um plano, como acontece no modo 2D, leva a que seja muitas vezes preferível utilizar os dados do modo 3D sob a forma de projecções paralelas da actividade do objecto em estudo 13 À primeira vista, poder-se-ia pensar que o ângulo azimutal φ deveria percorrer todo o intervalo entre 0 e 2π para que todas as LORs com inclinação ∆r e coordenada axial z fossem contabilizadas. No entanto, como ∆r pode ser tanto positivo como negativo, basta que se percorra o intervalo entre o e π, já que as LORs com “coordenadas” (xr,φ+π,z,∆r) e (xr,φ,z,−∆r) são as mesmas. 14 Mais uma vez, existem convenções diferentes para definir o ângulo θ. Tal como fizémos com a definição de φ, para θ tomamos a mais usada em PET, mesmo correndo o risco de gerar alguma confusão com a designação habitual do ângulo polar em sistemas de coordenadas esféricas. Relatório de Estágio 2. Tomografia por Emissão de Positrões (PET) 27 [Defrise 1998]. No modo 3D, estas projecções são bidimensionais, geradas no plano OXrYr definido pelas coordenadas angulares φ e θ (fig. 2.19a), e função de (xr, yr). A relação entre todos os sinogramas s3D(xr,φ,z,∆r) e todas as projecções p3D(xr,yr,φ,θ) é dada por p3D ( xr , yr ,φ ,θ ) = s3D ( xr ,φ , z , ∆r ) , (5) onde as coordenadas(xr,yr,φ,θ) das projecções se relacionam com as coordenadas (xr,φ,z,∆r) dos sinogramas de acordo com ⎧ xr ⎪ y r ⎪⎪ ⎨ φ ⎪ ⎪tan θ ⎪⎩ = xr = z cos θ , =φ ∆r × ∆d Z = 2 RD2 − xr2 (6) onde RD é o raio dos anéis do detector. Quando o raio do FOV, RFOV, e o comprimento do eixo do detector são pequenos relativamente a RD, pode considerar-se que as LORs agrupadas numa linha de um sinograma relativa a um ângulo azimutal φ são todas paralelas e que fazem todas o mesmo ângulo θ = arctan(∆r×∆dZ /2RD) com o plano OXY. Nesta aproximação, pode estabelecer-se uma correspondência directa entre essa linha e a linha de ordenada yr = z cosθ na projecção do objecto segundo os ângulos (φ,θ), tal como é indicado na figura 2.19b; a projecção segundo (φ, θ) corresponde assim às linhas de coordenada φ de todos os sinogramas com diferentes coordenadas z que fazem um ângulo π−θ com o eixo do detector. Caso a aproximação referida não seja válida, para cada valor da coordenada radial xr é necessário interpolar os valores registados nas colunas respectivas de sinogramas com diferentes inclinações para obter as projecções paralelas. A reconstrução do volume da imagem final no modo 3D utiliza todas as projecções p3D(xr,yr,φ,θ) simultaneamente, o que significa que os algoritmos de reconstrução em 3D trabalham num espaço quadridimensional, e envolve um grau de sofisticação considerável face ao espaço bidimensional no qual operam os métodos 2D, como veremos. sinograma para z=yr/cosθ projecção φ = φ1 π−φ Figura 2.19: (cima) Projecção de um objecto gerada no plano OXrYr definido pelos ângulos (φ, θ). (direita) Relação entre projecções paralelas e as linhas de um sinograma oblíquo. (adaptado de [Defrise 1998]) projecção φ = φ2 θ fixo z, ∆r fixos
Baixar