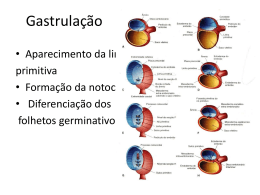
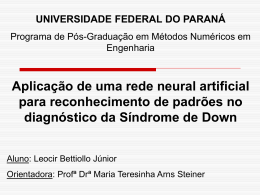
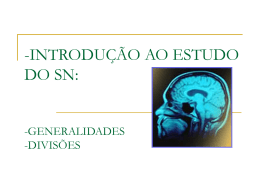
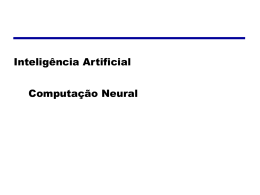
AUTOMAÇÃO DA ANÁLISE DO ENSAIO ULTRA-SÔNICO PULSO-ECO UTILIZANDO REDES NEURAIS ARTIFICIAIS Jordana Luiza Barbosa da Costa Veiga Departamento de Engenharia Mecânica LABOEND/COPPE/UFRJ – Universidade Federal do Rio de Janeiro Centro de Tecnologia, Bloco I, Sala 243, Cidade Universitária, Ilha do Fundão, 21945-970 Rio de Janeiro, RJ, Brasil Fone/Fax: (021) 2260-3549, e-mail: [email protected] Antonio Alves de Carvalho Departamento de Engenharia Metalúrgica e de Materiais LABOEND/COPPE/UFRJ – Universidade Federal do Rio de Janeiro Centro de Tecnologia, Bloco I, Sala 243, Cidade Universitária, Ilha do Fundão, 21945-970 Rio de Janeiro, RJ, Brasil Fone/Fax: (021) 2260-3549, e-mail: [email protected] Ivan Costa da Silva Departamento de Engenharia Metalúrgica e de Materiais LABOEND/COPPE/UFRJ – Universidade Federal do Rio de Janeiro Centro de Tecnologia, Bloco I, Sala 243, Cidade Universitária, Ilha do Fundão, 21945-970 Rio de Janeiro, RJ, Brasil Fone/Fax: (021) 2260-3549, e-mail: [email protected] João Marcos Alcoforado Rebello Departamento de Engenharia Metalúrgica e de Materiais LABOEND/COPPE/UFRJ – Universidade Federal do Rio de Janeiro Centro de Tecnologia, Bloco I, Sala 243, Cidade Universitária, Ilha do Fundão, 21945-970 Rio de Janeiro, RJ, Brasil Fone/Fax: (021) 2260-3549, e-mail: [email protected] Resumo A utilização do ultra-som como técnica não destrutiva para garantir a integridade de componentes e equipamentos industriais já é bastante conhecida e divulgada no meio acadêmico e industrial. Sua aplicação como ferramenta para localizar e dimensionar descontinuidades que tenham sido formadas durante a fabricação ou o processo de operação já é bastante dominada. Entretanto, existem hoje diversas pesquisas direcionadas para a otimização da técnica de ultra-som, principalmente para o desenvolvimento de sistemas automáticos de detecção e análise da inspeção. A utilização de ferramentas computacionais de reconhecimento de padrões, como as redes neurais artificiais (RNAs), abriu um novo horizonte para classificação de defeitos detectados por ultra-som. Neste trabalho é apresentado o desenvolvimento e operação de uma rede neural artificial no reconhecimento de padrões de sinais ultrasônicos obtidos na inspeção de soldas pela técnica pulso-eco em chapas de aço carbono de 17mm de espessura e 300mm de comprimento referindo-se a três condições da junta soldada: sem defeito (SD), falta de penetração (FP) e porosidade (PO). Uma rede neural tipo supervisionada funcionando como classificador mostrou-se eficiente na classificação desses tipos de sinais. Palavras chave: Ensaios Não Destrutivos, Ultra-som, Pulso-eco, Redes Neurais Artificiais. 1. Introdução A utilização de ensaios não destrutivos vem crescendo cada vez mais como forma de garantir a qualidade e a confiabilidade de produtos e equipamentos industriais. Sendo o ultra-som uma das técnicas de ensaios não destrutivos mais difundidas na detecção, localização e dimensionamento de descontinuidades. Entre as técnicas ultra-sônicas, o pulso-eco é a técnica mais largamente utilizada na indústria, devido, principalmente, a sua simplicidade e eficiência. Apesar de atingir grande velocidade de inspeção, alta probabilidade de detecção e baixa taxa de falsas indicações[1,2], a classificação de defeito através dos sinais ultra-sônicos pela técnica pulso-eco é uma tarefa muito difícil, mesmo para inspetores experientes e habilidosos, pois não é possível relacionar diretamente a amplitude e/ou posição do sinal refletido com a natureza do defeito. A correta classificação do tipo de descontinuidade reduziria erros de dimensionamento aumentando a confiabilidade do ensaio e consequentemente a segurança no material ensaiado. Com o objetivo de aumentar a confiabilidade na classificação de descontinuidades detectadas por este ensaio, utilizouse redes neurais artificiais (RNA) nos sinais ultra-sônicos oriundos de inspeções pela técnica pulso-eco em juntas soldadas em chapas de aço carbono. A classificação foi realizada levando-se em consideração três condições da junta soldada: sem 02 a 06 de Junho de 2003 / June 2 to 6 2003 Rio de Janeiro - RJ - Brasil defeito (SD), falta de penetração (FP) e porosidade (PO). Com o objetivo de evitar alguma distorção causada pelo pré processamento do sinal ou pela extração de características, propõe-se aqui utilizar o sinal ultra-sônico tal qual ele é adquirido, contrariamente a outros trabalhos realizados[3]. Além do mais, evitar o pré processamento torna o processo mais adequado para operação em sistemas de produção on-line. 2. Técnica Pulso-eco A técnica ultra-sônica pulso-eco é a mais largamente utilizada devido principalmente a sua simplicidade e eficiência. Esta técnica envolve a detecção de ecos produzidos pela reflexão, do pulso ultra-sônico, em uma descontinuidade presente no material ou pela interface do corpo de prova. É utilizado apenas um transdutor para emitir o pulso ultra-sônico (emissor) e receber o eco refletido (receptor). Quando o pulso emitido encontra uma superfície refletora, parte ou toda a energia é refletida, retornando ao transdutor. A porcentagem de energia que é refletida é diretamente dependente do tamanho da superfície refletora em relação ao tamanho do feixe ultra-sônico incidente. A direção do feixe refletido (eco) depende da orientação da superfície refletora em relação ao feixe incidente. A energia refletida é avaliada tanto pela quantidade de energia refletida em uma determinada direção quanto pelo tempo decorrido entre a transmissão do pulso inicial e a recepção do eco (Figura 1). Figura 1. Utilização da técnica pulso-eco para inspeção ultra-sônica. Uma das vantagens desta técnica é a grande sensibilidade para detecção de pequenas descontinuidades presentes no material, além de detectar com precisão descontinuidades logo abaixo da superfície de entrada do feixe sônico. Aumentando assim, a região de detecção de falhas internas ao material[4,5,6]. Para o desenvolvimento deste trabalho foi utilizada uma rede neural tipo classificador. A rede neural foi alimentada com as amplitudes dos sinais adquiridos pela inspeção dos corpos de prova pela técnica ultra-sônica pulso-eco, referindo as três condições da junta soldada analisadas nesta pesquisa: sem defeito (SD), falta de penetração (FP) e porosidade (PO). Cada sinal tem sua característica própria e é esta informação que a rede utilizará para identificar a que classe ele pertence (Figuras 2, 3 e 4). Figura 2. Exemplo de sinal característico da classe SD. Figura 3. Exemplo de sinal característico da classe FP. Figura 4. Exemplo de sinal característico da classe PO. 3. Redes Neurais Artificiais As redes neurais artificiais consistem de algoritmos que tentam modelar a maneira como o cérebro realiza uma tarefa particular ou função interesse: tais como reconhecimento de padrões, criação de associações e aprendizado com experiência ou treinamento. Muitas destas tarefas, que na maioria das vezes passam desapercebidas, são realizadas rotineiramente pelo ser humano. Como por exemplo, quando o homem no trânsito olha para o semáforo, distingue com facilidade a informação nele contida e em seguida inicia o procedimento devido. Esta pequena tarefa, como outras mais, parece trivial para os seres humanos, mas são extremamente complexas suas implementações computacionais. Isto pode estar relacionado ao fato de se considerar o cérebro como um computador altamente paralelo com bilhões de unidades processadoras (neurônios), que embora realizem operações simples isoladamente, têm maior poder quando trabalham simultaneamente. Embora sejam muito menos complexas que o cérebro humano, as redes neurais têm a capacidade de processar grandes quantidades de dados em curto espaço de tempo que normalmente só poderiam ser analisadas por um especialista. O treinamento ou aprendizado da rede a partir de exemplos, tal qual o cérebro humano, é uma de suas mais importantes características. A partir do treinamento é testada a capacidade de generalização da rede, que se refere a produção de saídas adequadas para entradas que não estavam presentes no treinamento (teste). Para que seja alcançado um bom desempenho na RNA, é preciso uma interligação de células computacionais simples denominadas “neurônios” ou “unidades de processamento”. Um neurônio é uma unidade de processamento de informação. Um modelo de neurônio apresenta três elementos básicos: um conjunto de sinapses caracterizado por um peso dado a cada neurônio, que pode ser tanto positivo como negativo; um somador que irá somar os sinais de entrada após serem ponderados pelas sinapses; e uma função de ativação, que servirá para restringir a amplitude da saída de cada neurônio[7,8] (Figura5). Figura 5. Modelo de um neurônio não-linear. onde: N u = ∑w .x i j =1 ij j v =u +b i i (1) (2) i N v = ∑w .x i j =0 y y i i ij j (3) = h(u i + bi ) (4) = h(vi ) (5) Uma rede neural funcionando como classificador, tem por objetivo principal realizar uma separação de dados em classes através de características extraídas de um sinal de entrada. Para um vetor X com K características, a classificação consiste em associar este vetor a uma classe i por uma regra de classificação. Os possíveis padrões para uma classe formam um conjunto denominado espaço de padrões. Para definir a regra de classificação, o classificador precisa necessariamente receber um conjunto com informações ou as características de cada classe que ele se propõe a classificar. As características estão apresentadas em um conjunto denominado espaço de características. Este conjunto possui vários padrões com as características de cada classe e pode possuir a respectiva classificação correta. Para a classificação correta, o classificador pode entrar em uma fase de treinamento supervisionado e os dados de entrada para treinamento junto com a classificação são denominados conjunto de aprendizado ou base de dados para treinamento supervisionado. Existem classificadores que podem formar a regra de decisão para a classificação sem receber a classe do conjunto de treinamento, realizando somente separação de dados com mesmo padrão de características em classes. Este método é denominado treinamento não-supervisionado. As redes neurais quando trabalhando como classificadores tem seu funcionamento em dois modos diferentes: treinamento, onde há a introdução dos padrões de dados para reconhecimento de modo supervisionado ou não- supervisionado, e operação, onde com os padrões devidamente definidos, é possível realizar a classificação do sinal de entrada em classes. A formação de uma rede neural consiste em interconectar vários neurônios formando uma camada de neurônios, ou ainda interconectar várias camadas formando uma rede mais complexa. Cada interconexão entre 2 neurônios i e j, sendo o i o neurônio onde sai uma resposta e j o neurônio onde chega uma informação, tem um peso wij denominado sinapse que servirá como um fator de ponderação da saída do neurônio i para o resultado da combinação linear das entradas do neurônio j. Quanto maior o número de neurônios a serem escolhidos, maior é a complexidade da rede e maior é o esforço para ela realizar a computação das distâncias de similaridade, já que se trata de um sistema de inteligência artificial distribuído e paralelo[9]. 4. Procedimento Experimental 4.1. Material Os sinais utilizados foram adquiridos de doze corpos de prova de junta de topo soldada em chapas de aço carbono AISI 1020 de 17mm de espessura com 300mm de comprimento; chanfro em V com 50o de inclinação, distância entre a raiz de aproximadamente 2mm e soldadas com eletrodo revestido. Os defeitos existentes nestes corpos de prova foram gerados intencionalmente durante o processo de soldagem. Para a inspeção nestas juntas pela técnica pulso-eco foram utilizados transdutores angulares com freqüência de 4MHz e 60º de incidência do feixe sônico no material e um aparelho de ultra-som convencional modelo ECHOGRAPH 1080 de fabricação da KARL DEUTSCH. Todos os resultados obtidos pela técnica pulso-eco nos corpos de prova foram confirmados através de ensaios radiográficos. 4.2. Ensaios Foi utilizado, no presente trabalho, o software NEUROSHELL. Nele foi configurado uma rede neural supervisionada com 3 camadas ocultas. A rede apresenta 512 neurônios na camada de entrada (correspondendo ao número de pontos do sinal), 89 neurônios em cada camada oculta e apenas um neurônio na camada de saída, que corresponde a classe que será classificada, conforme figura 6. A utilização de 4 diferentes funções de ativação, tais quais: linear e tangente hiperbólica (tanh), proporcionaram uma melhoria no aprendizado da rede. Foram adquiridos para cada classe de defeito 40 sinais para treinamento e 10 sinais para teste. Cada sinal contendo 512 pontos. A rede, então, foi alimentada com as amplitudes dos sinais referentes a cada condição: FP, PO e SD. Camada 1 Entrada Camada 3 Saída Camada 2 Figura 6. Configuração da rede neural utilizada. 5. Resultados e Discussões Um classificador de padrões não linear foi implementado com uma rede neural do tipo backpropagation, com 3 camadas ocultas e 512 neurônios de entrada, um para cada ponto do sinal de entrada. Foram testadas diferentes funções de ativação e o conjunto que apresentou melhor resultado foi o composto pelas seguintes funções: linear, na camada de entrada, gaussiana e tangente hiperbólica, nas camadas ocultas, e logística, na camada de saída. As entradas do classificador foram as amplitudes dos sinais ultra-sônicos digitalizados. A seguir são apresentados os resultados do treinamento e do teste da rede neural. Sendo o teste uma medida de generalização da rede durante o treinamento. A tabela 1 apresenta resultados do treinamento, enquanto a tabela 2 resultados do teste. Pode ser observado através destas tabelas que o resultado geral para os dados de treinamento (100%) é superior ao resultado geral para os dados de teste (73,3%). Isso é justificado pela teoria de que é mais fácil classificar um sinal que foi conhecido pela rede neural pelo processo de treinamento. Pela tabela 1 observa-se que os dados de treinamento foram facilmente separados. Já os dados de teste apresentaram erros na classificação. A classe que apresentou pior índice de acerto foi PO (60%). A classe SD apresentou o melhor desempenho com 90% de acerto seguido por FP com 70%. De acordo com as características do sinal de cada classe, esperava-se que a classe SD não fosse “confundida” com outras classes, uma vez que esta possui apenas o pulso inicial. No entanto, o ruído presente no sinal pode, em alguns casos, possuir amplitude suficientemente alta para ser confundido com picos provenientes de defeitos, ocasionando uma “confusão” com as outras classes. Chegou-se ao desempenho geral da rede neural de 100% de acerto para os dados de treinamento e 73,3% para os dados de teste, um resultado bastante promissor, que encoraja a continuação de trabalhos nesta linha de pesquisa. Tabela 1 –Tabela de Acertos e Erros para Sinais de Treinamento FP PO SD TOTAL Acerto 100% 100% 100% 100% Erro 0% 0% 0% 0% Acerto 70% 60% 90% 73,3% Erro 30% 40% 10% 26,7% Tabela 2 – Tabela de Acertos e Erros para Sinais de Teste FP PO SD TOTAL 6. Conclusões A rede neural foi capaz de classificar sinais ultra-sônicos sem defeitos, com falta de fusão e falta de penetração com razoável nível de acerto (73,3%). A classe de defeito que apresentou maior confusão foi a porosidade e a que apresentou menor número de erros foi a classe sem defeito. A utilização de um conjunto maior de padrões de treinamento da rede neural, incluindo de forma adequada dados representativos de todas as classes a serem classificadas é um fator que pode contribuir para o aumento do desempenho da RNA. Em geral, os resultados obtidos são muito promissores, dando contribuições que são importantes para pesquisa e desenvolvimento de um sistema automático para detecção e classificação de defeitos de soldagem pela técnica ultra-sônica pulso-eco. O método pode também ser utilizado como ferramenta de auxílio para o operador na classificação de defeitos de soldagem, reduzindo os erros nesta operação. Em continuação aos trabalhos será testado um pré processamento no sinal, tal como a aplicação de um filtro passa baixa para eliminar ruído, para avaliar se esta operação trará melhorias consideráveis no desempenho da rede. 7. Agradecimentos Os autores gostariam de agradecer ao CNPq e a CAPES pelo apoio financeiro. 8. Referência Bibliográfica [1] Carvalho A. A., Sagrilo L. V. S., Silva I. C., Rebello, J. M. A., 2002, “The PoD Curve for the Detection of Planar Defects Using a Multi-channel Ultrasonic System”, Insight, Vol. 44, N°11, pp. 689-693. [2] Ogilvy J. A., 1993, “Model for Predicting Ultrasonic Pulse-echo Probability of Detection”, NDT & E International, Vol. 26, N°1, pp. 19-29. [3] Masnata A, Sunseri M, 1996, “Neural Network Classification of Flaws Detected by Ultrasonic Means”, NDT & E International, Vol. 29, N°2, pp. 87-93. [4] SANTIN, J.L., 1996, “Ultra-som Técnica e Aplicação”, 1a Edição, Rio de Janeiro, Editora Qualitymark. [5] Nondestructive Evaluation and Quality Control, ASM Handbook, 1994, 3a. edição, Vol. 17. [6] American Society for Nondestructive Testing, Nondestructive Testing Handbook, 1991, 2a. Edição, Vol. 7. [7] Haykin S., 1994, “Neural Networks, A Comprehensive Foundation”, Macmillian College Publishing. Inc. [8] Wasserman P. D., 1989, “Neural Computing Theory and Practice”, New York, Van Nostrand Reinthold. [9] Calixto, M. F. L., 1999, “Deteção e Classificação de Acidentes Geográficos em Tubulações por Inspeção Eletromagnética com PIGS Inteligentes”. Tese de M.Sc., COPPE/UFRJ, Rio de Janeiro, Brasil. USE OF ARTIFICIAL NEURAL NETWORK FOR THE AUTOMATION OF THE PULSE-ECHO ULTRASONIC TECHNIQUE ANALYSIS Abstract The use of ultrasonic as a nondestructive technique to assure the integrity of industrial components and equipments is well know in both academic and industrial areas. Therefore it’s application as a tool to locate and size discontinuities that have been formed during fabrication or operation process is widely known. The optimization of the ultrasonic techniques has been largely researched, specially the development of automatic systems for detection and signal analysis. The use of computational tools for pattern recognition, as artificial neural networks (ANN), offered a new way to classify the defects detected by the ultrasonic technique. This work presents the development and operation of an ANN for pattern recognition of pulse-echo ultrasonic signals, acquired in the inspection of steel plates 17mm thick and 300mm of length. Three conditions of the welded joints were evaluated: no defect (ND), lack of penetration (LP) and porosity (PO). A supervised ANN working like classifier showed efficiency in the classification of this kind of signals. Keywords: Nondestructive Testing, Ultrasonic, Pulse-echo, Artificial Neural Networks.
Baixar