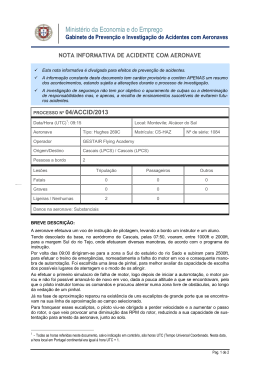
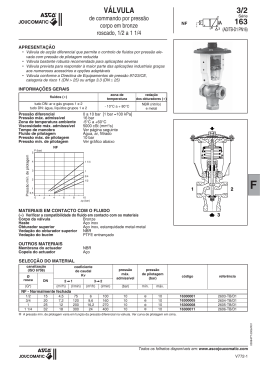
Anais do XIX Congresso Brasileiro de Automática, CBA 2012. AVANÇOS EM ASSISTÊNCIA À PILOTAGEM PARA AERONAVES LEVES, UM ESTUDO DE CASO GUILHERME A. SANTANA, PAULO H. ISCOLD A. OLIVEIRA, ANTÔNIO R. SILVA FILHO, IGOR M. MALAQUIAS, RODRIGO A. TORRES. Programa de Pós-Graduação em Engenharia Mecânica, Centro de Estudos Aeronáuticos, Departamento de Engenharia Mecânica, Universidade Federal de Minas Gerais E-mails: [email protected], [email protected] Abstract The main goal of the present work was to design and test a pilot assisting technique for light aircraft, utilizing modified PID controllers, maintaining the pilot authority and flight safety, simplifying the piloting. Using a dynamical model of the ACS-100 Sora aircraft, it was programed the longitudinal and lateral-directional controller, with the subsequent gain adjustment for these controllers. After the gain adjustment, the controlled model (pilot assistance) was adapted into a simulation platform at CEA-UFMG and volunteers where invited to simulate a flight in a predefined trajectory. It was possible to notice that the inexperienced volunteers in piloting managed to obtain similar performance in relation to the private pilots. Keywords Pilot assisting, pilot assistance, fly by wire, light aircraft, general aviation, aircraft control, gain scheduling, CEA. Resumo A presente pesquisa, em cujo artigo a metodologia e os resultados são mostrados, objetivou o projeto e teste de um sistema de assistência à pilotagem para aeronaves leves, utilizando controladores PID modificados, mantendo-se a autoridade do piloto e a segurança de voo, para facilitar a pilotagem. Utilizando-se um modelo dinâmico da aeronave ACS-100 Sora, programou-se os controladores longitudinal e látero-direcional, realizando-se o ajuste dos ganhos destes controladores. Após o ajuste dos ganhos, o modelo com os controladores (pilotagem assistida) foi adaptado em uma plataforma de simulação de voo do CEAUFMG e voluntários foram convidados a realizar o voo simulado em uma trajetória pré-estabelecida. Pôde-se notar que os voluntários inexperientes em pilotagem conseguiram resultados semelhantes aos pilotos privados. Palavras-chave Assistência à pilotagem, aeronaves leves, aviação geral, controle de aeronaves, ajuste de ganhos, CEA. 1 Introdução A aviação geral é um ramo da tecnologia aeronáutica que carece de estudos e pesquisas. Uma evolução considerável foi conseguida para aeronaves maiores, principalmente as executivas e comerciais. Ao passo que as aeronaves leves evoluíram em um ritmo bem menor em quesitos importantes como: segurança, desempenho, eficiência, facilidade de pilotagem, dentre outros. Um dos principais fatores que levaram ao distanciamento entre aeronaves leves e as demais foi o avanço em técnicas de controle de aeronaves. A pesquisa em técnicas de assistência à pilotagem, do tipo Fly-by-Wire (Fielding, 2000), foi custeada pelas grandes fabricantes e praticamente inexistente para as aeronaves leves. Sabendo disso, a agência americana NASA (National Aeronautics and Space Administration), iniciou, na década de 90, um novo campo de pesquisa para aeronaves leves, o do veículo aéreo pessoal ou PAV (CAFE, 2012). O objetivo do campo de pesquisa do PAV era estudar maneiras de se conseguir o veículo aéreo pessoal (para até 2 pessoas), cujas características principais seriam: segurança, baixo ruído e conforto, com a pilotagem tão simples quanto a de um carro. O PAV seria um esforço em direção ao carro voador, ou seja, um veículo voador que seria utilizado diariamente e fosse tão fácil de pilotar ISBN: 978-85-8001-069-5 quanto um carro e requeresse o mesmo tempo de treinamento que este. Inserindo-se no campo do PAV, o CEA (Centro de Estudos Aeronáuticos) do DEMEC (Departamento de Engenharia Mecânica) da UFMG (Universidade Federal de Minas Gerais), uma instituição que estuda, pesquisa, projeta, desenvolve, fabrica e melhora aeronaves leves desde 1963, está estudando técnicas de assistência à pilotagem. O objetivo é facilitar a tarefa de pilotagem com o auxílio de um computador embarcado. Atualmente, as técnicas de assistência à pilotagem para aeronaves leves seguem o conceito de Flyby-Wire (FBW). Segundo Fielding (2000), a principal característica do controle FBW é a independência mecânica entre o piloto e os mecanismos de controle (ailerons, profundor, leme, abertura do carburador do motor, compensadores, etc.). Neste tipo de pilotagem, o piloto indica um setpoint para os controladores através do movimento das interfaces de controle (joystick, pedais, manetes). O computador de voo calcula, então, os movimentos necessários nos servomotores para atuação dos mecanismos de controle, enviando o sinal de tensão para os mesmos. Portanto, os mecanismos de controle (superfícies aerodinâmicas e comandos do motor) são independentes do controle direto do piloto. A pilotagem direta de uma aeronave é uma tarefa considerada, por muitos, de alto grau de dificuldade, dependendo, em certa medida, do talento natural 5464 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. do piloto. Isto acontece, principalmente, devido aos seguintes fatos: i) inexistência de uma relação direta entre comando do piloto e trajetória da aeronave (e.g.: à medida que se levanta o nariz da aeronave até próximo ao ângulo de estol, a velocidade de subida em equilíbrio diminui); ii) dificuldade de adequar a capacidade da aeronave à pilotagem (e.g.: por vezes, pilotos iniciantes chegam na velocidade mínima, o estol, por levantarem demais o nariz da aeronave almejando subidas mais abruptas); iii) atuação de mais de um comando ao mesmo tempo (e.g.: quando se inicia uma curva, é necessário variação do comando de aileron, leme, motor, profundor e pedal para realizá-la nivelada e da melhor maneira, ou seja, curva coordenada); iv) necessidade de se antever o comportamento da aeronave (e.g.: se a velocidade está aumentando consideravelmente em um mergulho, é necessário diminuir a manete de potência antes de se alcançar a velocidade máxima estrutural). Portanto, com o objetivo de atacar os itens anteriores e facilitar a pilotagem, projetou-se uma estratégia de assistência à pilotagem para a aeronave ACS-100 Sora, testando-a em um simulador com voluntários apresentando diferentes níveis de experiência em pilotagem ou simulação de voo. O objetivo específico era que um voluntário com nenhum conhecimento de aviação pudesse ter um desempenho comparável aos pilotos privados. A aeronave ACS100 Sora e a plataforma de simulação estão mostradas na figuras 1 abaixo. 2 2.1 Tabela 1. Controladores PID. PID Comando do piloto Entrada (setpoint) Saída 1 Manche Ângulo da trajetória Deflexão do profundor 2 Manete Velocidade aerodinâmica Abertura do carburador 3 Manche Ângulo de rolamento (Bank) Deflexão do aileron Pedal Ângulo de derrapagem Deflexão do leme 4 Var Ângulo de trajetória Metodologia Controladores Para o projeto do sistema de assistência à pilotagem em questão, utilizaram-se 4 controladores PID Ogata (2006). Os detalhes destes controladores podem ser visualizados na tabela 1 abaixo. A figura 2 abaixo mostra as variáveis de controle. Ângulo de Bank Var Ângulo de derrapagem Figura 2. Variáveis de controle. Figura 1. ACS-100 Sora e plataforma de simulação. ISBN: 978-85-8001-069-5 A fim de adaptar estes controladores ao caso real, utilizaram-se alguns elementos nos mesmos, baseando-se em Visioli (2010). Tais elementos são listados na tabela 2 abaixo. 5465 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. Tabela 2. Elementos extras dos controladores PID. Elemento Objetivo Atuação Filtro derivativo Diminuir picos da resposta derivativa Função de Transferência de primeira ordem após o elemento derivativo Antiwindup do integrador Diminuir sobressinal e tempo de acomodação Zera o sinal de erro integral se ocorrer saturação Saturação Garantir o limite de deflexões Limitador da lei de controle final Setpoint Weighting Diminuir o sobressinal Função de transferência de segunda ordem no setpoint Segundo Fielding (2000), os ganhos ótimos dos controladores FBW de uma aeronave dependem de fatores como: velocidade do ar, densidade do ar e posição do centro de gravidade da aeronave (C. G.). Sendo assim, programou-se um algoritmo para encontrar ganhos sub-ótimos, denominados, daqui em diante, de ganhos eficazes. Nesse algoritmo, os ganhos eficazes são calculados para cada condição de velocidade do ar, densidade do ar e posição do C.G. da aeronave. As seguintes etapas são realizadas no algoritmo em questão: 1. Calculam-se os novos parâmetros aerodinâmicos do modelo em função da posição do C.G., velocidade do ar e densidade do ar; 2. Determinam-se todos os estados da aeronave para voo reto nivelado (entradas mais as condições dos 6 graus de liberdade); 3. Obtém-se estimativas iniciais dos ganhos através do segundo método de Ziegler-Nichols (Ogata, 2006); 4. Utiliza-se um algoritmo de otimização para melhorar o desempenho das estimativas iniciais do passo 3. No passo 4, acima, utilizou-se o algoritmo Pattern Search (Audet et. al, 2003), sendo que a função objetivo do algoritmo de otimização, para cada controlador, era o módulo da integral do sinal de erro ao degrau positivo e degrau negativo no setpoint de cada controlador. Ou seja, simula-se a aeronave ACS-100 Sora com a estratégia de pilotagem assistida proposta, após o equilíbrio reto-nivelado. Aplica- ISBN: 978-85-8001-069-5 se, primeiramente, um degrau de 1º ao primeiro PID, cujo setpoint é o ângulo da trajetória, por 5 segundos e, após, um degrau de -1º por 5 segundos. O módulo do sinal de erro, ou seja, resposta do ângulo de trajetória menos o setpoint é, então, integrado. Este valor é a saída da função objetivo a ser minimizada. De maneira análoga ao primeiro controlador, realiza-se a otimização para os demais, obtendo-se o conjunto de ganhos para esse valor de densidade do ar, velocidade aerodinâmica e posição do C.G. 2.2 Simulação A fim de se testar o desempenho dos controladores, 22 voluntários foram convidados a realizar um voo simulado na plataforma de simulação do CEAUFMG. Tais voos simulados ocorreram em uma trajetória e velocidades pré-estabelecidas, mostrados na figura 3 abaixo. Esta trajetória era visualizada na tela pela forma de um “túnel no céu” (Mulder, 2003), ou seja, argolas visíveis pelos pilotos, que foram instruídos a passar no centro das mesmas. Cada trecho continha sua velocidade requerida, informada pelo piloto por placas no início dos trechos. Os mesmos foram instruídos a tentar manter a velocidade aerodinâmica do trecho, por meio do controle da atitude e manete de potência. Foram realizados 6 testes para cada voluntário. Os primeiros 3 testes foram para C.G. dianteiro e os últimos 3 testes foram para C.G. traseiro. Dentro de cada grupo de 3 testes, realizou-se um sem pilotagem assistida (controle direto da aeronave), outro com pilotagem assistida e ganhos fixos (escolheram-se ganhos para condições extremas da otimização, velocidade de mergulho e nível do mar) e outro com pilotagem assistida e ganhos variáveis (gain scheduling) em função da velocidade aerodinâmica, densidade do ar e posição do C.G. Figura 3. Trajetória e velocidades para a simulação. 5466 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. Dentre os 22 voluntários, 3 eram pilotos privados certificados, 8 pessoas tinham experiência em simuladores de voo e 7 pessoas não tinham contato algum com aviação, simuladores de voo ou jogos eletrônicos. Para avaliar o desempenho dos controladores em relação à concordância com a trajetória e a velocidade, uma métrica de pontuação foi criada. Em tal métrica, faz-se a pontuação em relação à adequação à trajetória e a pontuação em relação à adequação à velocidade. A pontuação final para cada teste foi, então, a média das duas pontuações. Para a pontuação da trajetória, considera-se a distância do C.G. da aeronave ao centro da argola mais próxima. Se esta distância for maior ou igual a 80 m, o voluntário obtém zero pontos naquele instante, se essa distância for menor ou igual a 2 m, o voluntário obtém 100 pontos naquele instante, sendo que, entre 80 m e 2 m, a variação da pontuação é linear. Realiza-se, então, a média das pontuações em todos os instantes, obtendo-se a pontuação da trajetória. Para a pontuação da velocidade, um erro maior ou igual a 8 m/s na velocidade estipulada para o trecho gera uma pontuação de 0. Um erro menor ou igual a 1 m/s gera uma pontuação de 100, variando-se linearmente entre estes valores. 3 3.1 Figura 4. Ganho proporcional do PID 1. Esse resultado apresenta coerência teórica, haja vista que necessita-se de menos deflexão do profundor para uma mesma aceleração de arfagem, em velocidades maiores. Para a influência da posição do C.G., é possível afirmar que, quanto mais dianteiro o mesmo, maior o módulo do ganho proporcional. Isto acontece pois, fazendo-se uma analogia com o sistema massa-molaamortecedor, a rigidez de arfagem dCm d é maior quando o C.G. é dianteiro (Etkin, 2000). Ou seja, é necessário uma maior deflexão do profundor para atingir a mesma variação no ângulo de ataque e, portanto, na atitude da aeronave. Resultados 3.2 Ganhos Na figura 4, abaixo, observa-se um exemplo do diagrama de ganhos (gain scheduling). Neste caso está mostrado o ganho proporcional do controlador de ângulo de trajetória (PID 1) para uma densidade do ar específica. Os pontos azuis representam os valores calculados pelo algoritmo de cálculo dos ganhos (valores da malha). A superfície foi gerada pelo método dos mínimos quadrados (Chapra et. al, 2002). Para este exemplo, a equação obtida é a seguinte, Kp 5.38 0.12 x 10.8 y 9.27 104 x 2 0.12 xy 2.61 y 2 , (1) sendo x a velocidade equivalente do ar (EAS em m/s) e y a posição do C.G. na corda média aerodinâmica (de 0 a 1). A unidade de Kp é rad/rad (deflexão do profundor sobre ângulo de trajetória), portanto, adimensional. Como exposto anteriormente, o PID 1 controla o ângulo de trajetória através da atuação do profundor. Pode-se perceber que o módulo do ganho proporcional diminui com o aumento da velocidade. ISBN: 978-85-8001-069-5 Testes no simulador A Figura 5 abaixo mostra duas fotos do voo simulado para um voluntário específico no mesmo trecho da trajetória. Na parte superior (primeira foto) está presente a pilotagem assistida, na parte inferior (segunda foto) não está presente a pilotagem assistida. É possível perceber um desvio muito maior, na foto inferior, em relação à trajetória ideal (argolas amarelas). É possível perceber que a velocidade equivalente do ar (EAS) está mais próxima do requisitado para o trecho (84 kts) na foto superior. Este voluntário, especificamente, não tinha experiência com simuladores de voo nem pilotagem, porém, tinha conhecimento em engenharia aeronáutica. Os 6 testes foram realizados para os 22 voluntários, os estados e entradas foram gravados e posteriormente analisados. Em geral, os voluntários tiveram bastante dificuldade para realizar o voo simulado sem pilotagem assistida e facilidade no outro caso. A maior dificuldade reportada pelos voluntários, para o primeiro caso, era conciliar a atenção para a trajetória e para a velocidade ao mesmo tempo. 5467 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. teste “CG35 GV”, indicando que o pior piloto obteve uma nota parecida com o melhor piloto, quando esteve presente a pilotagem assistida. A melhor nota em cada teste aumentou, também, do teste “direto” para o teste “GV”. 100 Pontuação final (0 a 100) 90 80 70 60 50 40 30 20 10 CG35 GV CG35 GF CG35 direto CG15 GV CG15 GF Figura 5. Voo simulado na plataforma de simulação. CG15 direto 0 Figura 6. Pontuação dos voluntários. 3.3 Pontuação A figura 6 abaixo mostra a pontuação, calculada para cada um dos 6 testes para todos os voluntários de acordo com a métrica explicada na seção 2.2. Tal figura utiliza a forma de Boxplot. O retângulo azul é limitado superiormente pelo percentil 75% (25% dos voluntários tiveram nota acima), limitado abaixo pelo percentil 25% (25% dos voluntários tiveram nota abaixo), a mediana, ou seja, o percentil 50%, é representado pela linha vermelha. As linhas pretas em “T” representam os valores máximos e mínimos de pontuação obtidos pelos voluntários, desconsiderando-se os outliers. O critério para classificação de outliers foi o de Tukey (1977). Através deste critério, considerou-se como outlier todo voluntário que se distanciasse mais de duas vezes o comprimento do retângulo azul, da aresta mais próxima deste retângulo. As legendas “CG15” e “CG35” significam testes com C.G. a 15% e 35% da corda média aerodinâmica (Etkin, 2000), respectivamente. A legenda “direto” significa controle direto, sem pilotagem assistida. A legenda “GF” significa com pilotagem assistida e ganhos fixos, escolhidos para situações extremas de velocidade e posição do C.G. A legenda “GV” significa com pilotagem assistida e ganhos variáveis, de acordo com o diagrama de ganhos (Gain Scheduling). Percebe-se, para um mesmo valor de posição do C.G., um aumento de 35 para 85 no valor da mediana do teste “direto” para o “GV”. Isto indica que a maioria dos candidatos apresentou melhor adequação à trajetória e velocidade quando estava presente a pilotagem assistida (143% melhor, segundo a métrica adotada). Percebe-se, também, que o comprimento do retângulo azul, uma medida da dispersão das notas, foi de 32 no teste “CG15 direto” para 5 no ISBN: 978-85-8001-069-5 O fato anterior indica que a pilotagem assistida também foi eficiente para pilotos privados, acostumados com o método direto de pilotagem. Observa-se, também, que a utilização dos diagramas de ganhos (“GV”) apresentou resultados 12% melhores que os ganhos fixos (“GF”) para C.G. dianteiro e 2% melhores para C.G. traseiro (mediana). Além disto, houve uma redução de 33% na dispersão das notas, para C.G. dianteiro e 60% para C.G. traseiro. No entanto, a observação mais impressionante é a de que, no caso do teste “CG35 GV”, todos os voluntários, com exceção de um outlier, obtiveram notas superiores à melhor nota sem pilotagem assistida. Ou seja, o pior piloto dentre estes 21 voluntários se saiu melhor, com pilotagem assistida, que o melhor piloto sem a presença da mesma. Fato que ratifica a estratégia de assistência à pilotagem utilizada e encoraja testes futuros em um protótipo. É importante observar que a ordem de realização dos testes foi sempre a exposta no eixo horizontal da figura 6. Portanto, é possível que tenha ocorrido o aprendizado dos voluntários ao longo dos testes, fato que diminuiria o mérito do teste e, portanto, da técnica de assistência à pilotagem estudada. Porém, uma observação em especial minimiza a probabilidade de ocorrência ou importância deste fato. Ao observar o teste CG35 direto, percebe-se que o percentil 25 e o percentil 75 estão com notas abaixo dos respectivos percentis do teste CG15 direto. Portanto, é possível concluir que o efeito da posição do CG fez com que a maioria das notas abaixasse, mesmo sendo o quarto teste. Através desta observação, pode-se dizer, pelo menos, que o efeito da posição do C.G. foi maior que o efeito da aprendizagem pela ordem dos testes. 5468 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. Testes futuros serão conduzidos com ordem aleatória, para que tal variável seja eliminada. 3.4 Fatores de carga A figura 7 abaixo mostra os fatores de carga máximos e mínimos alcançados pelos voluntários nos seis testes. O fator de carga é calculado pela seguinte equação (Etkin, 2000): n 1 az . g (2) Na equação acima, n é o fator de carga, az a aceleração no eixo z do corpo (perpendicular à asa e ao eixo longitudinal, apontando para baixo da aeronave), g = 9.81 m/s2 a aceleração da gravidade. to”. Para os casos com pilotagem assistida, os fatores de carga ficaram dentro da faixa -1 a 4, respeitandose os limites estruturais da aeronave e ocasionando maior conforto, caso o piloto conseguisse sentir estas acelerações. 3.5 Velocidades extremas A figura 8 abaixo mostra as velocidades máximas e mínimas alcançadas em todos os testes. Percebe-se que, no gráfico de velocidade máxima para o teste “CG15 direto”, várias pessoas passaram da VNE, ou seja, velocidade para nunca exceder, da aeronave. Duas pessoas passaram da VD da aeronave, ou seja, velocidade de mergulho, utilizada para o cálculo estrutural (82 m/s). Em uma situação real de voo, estes voluntários estariam correndo risco de vida devido à falha estrutural da asa, causada pelo aumento do esforço de torção ou por Flutter (Bisblinghoff et. al, 1996). 90 6 EAS máxima (m/s) Fator de carga máximo 8 4 2 80 vne 70 60 0 35 15 CG35 GV 10 CG35 GF CG35 GV CG35 GF CG35 direto CG15 GV CG15 GF CG15 direto -4 20 CG35 direto -3 estol 25 CG15 GV -2 30 CG15 direto -1 CG15 GF 0 EAS mínima (m/s) Fator de carga mínimo 1 Figura 7. Fatores de carga. Figura 8. Velocidades extremas. Sabe-se que, como a aeronave ACS-100 Sora é semiacrobática, os fatores de carga limite da aeronave foram estipulados entre -3 e +6. Portanto, observando-se a figura 7 acima, percebe-se que alguns voluntários ultrapassaram o fator de carga limite positivo, sem pilotagem assistida. Um outlier chegou próximo, até mesmo, do fator de carga final de +9, considerado para o cálculo estrutural da aeronave. Tal condição pode, em uma situação real de voo, ocasionar deformação permanente da estrutura, uma situação extremamente insegura. Percebe-se, também, que o fator de carga limite mínimo foi quase atingido para o teste “CG35 dire- ISBN: 978-85-8001-069-5 Para os casos com pilotagem assistida, a velocidade máxima ficou limitada por uma configuração inicial do sistema. Pela figura 8, percebe-se que esta limitação foi realizada com sucesso pelo controlador. No caso das velocidades mínimas, percebe-se que entre 50% e 75% dos voluntários chegaram abaixo do estol para o teste “CG15 direto”. Para o teste “CG35 direto”, mais de 75% dos voluntários chegaram abaixo do estol da aeronave. A velocidade de estol é aquela abaixo da qual não se consegue equilíbrio da aeronave, devido ao fato de a força que equilibra o peso, a sustentação, só apresentar valores 5469 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. menores que o primeiro, para essa faixa de velocidades. Segundo Anderson (2007), o estol acontece pois, a partir de um certo ângulo de ataque, o escoamento de ar não mais permanece na maior parte do extradorso (superfície superior) da asa, que perde a capacidade de aumentar a sustentação com o aumento de ângulo de ataque. Esta situação é extremamente insegura e deve ser evitada, principalmente em baixa altitude. Portanto, o teste indicou que mais de 75% dos voluntários se apresentaram em uma situação de risco, sem pilotagem assistida. Ao passo que, com exceção de um outlier, todos os outros voluntários conseguiram evitar a região de estol da aeronave. Isto foi realizado com apenas 5 minutos de explicações antes de se iniciar o teste, ou seja, 5 minutos de treinamento. Durante este treinamento, explicou-se, aos voluntários, sobre o estol e sobre a velocidade a ser evitada, ressaltando que isto seria feito automaticamente para o caso com pilotagem assistida. A condição de estol é um dos motivos pelos quais o treinamento para pilotos é oneroso em termos de tempo e dedicação. Gasta-se muito tempo treinando o aspirante a piloto de modo a operar de maneira segura, principalmente quanto ao envelope de velocidades da aeronave. Este trabalho mostrou que, para a missão em questão, este tempo de treinamento pôde ser minimizado em grande medida, com a utilização da estratégia de assistência à pilotagem, ainda assim acarretando segurança na operação. 4 Conclusão Com o presente trabalho foi possível observar: O pior piloto consegue desempenho similar ao melhor piloto quando está presente a pilotagem assistida. A diferença entre o pior piloto e o melhor piloto sem pilotagem assistida é cinco vezes maior que no caso com pilotagem assistida (utilizando-se como parâmetro o esquema de pontuação desse trabalho). Muitos voluntários, em várias ocasiões, saíram do envelope de segurança (fator de carga e velocidade) sem pilotagem assistida, fato que só ocorreu em uma ocasião com pilotagem assistida. O sistema com ganhos variáveis (gain scheduling) apresentou desempenho superior ao sistema com ganhos fixos (12% melhor para C.G. dianteiro), em relação à mediana da pontuação e, principalmente, em relação à dispersão da pontuação (60% de redução na dispersão para C.G. traseiro). Sendo assim, conclui-se que o sistema proposto consegue facilitar a pilotagem para aeronaves leves, fazendo com que pessoas completamente inexperientes em pilotagem consigam realizar, em simulador, uma trajetória com retas, curvas, subidas e descidas ISBN: 978-85-8001-069-5 em velocidades pré-estabelecidas com desempenho comparável aos pilotos privados. Esta operação foi precedida, apenas, por uma explicação de 5 minutos sobre o funcionamento do sistema e, ainda assim, foi realizada com total segurança quanto ao envelope de operação da aeronave. Agradecimentos Os autores agradecem ao CNPQ pelo financiamento dessa pesquisa e, também, à FAPEMIG pelos auxílios financeiros relativos ao congresso. Referências Bibliográficas Anderson, J. D. (2007). Fundamentals of Aerodynamics. New York: McGraw Hill. Audet, C.; Dennis Jr., J. (2003). Analysis of Generalized Pattern Searches. SIAM Journal on Optimization, 13, número 3, pp. 889-903. Bisblinghoff, R. L.; Ashley, H.; Halfman, R. L. (1996). Aeroelasticity. Dover Publications. CAFE (2012). Personal Air Vehicles. Acesso em 26 de abril de 2012. Disponível em http://www.cafefoundation.org/v2/pav_archive.p hp. Chapra, S. C.; Canale, R. P. (2002). Numerical Methods for Engineers. Ed. 4. Nova York: McGraw-Hill. Etkin, B. (2000). Dynamics of Flight, Stability and Control. Ed. 3. Wiley. Fielding, C. (2000). The design of fly-by-wire Control Systems. Aeronautical Journal. Mulder, M. (2003). An Information Centered Analysis of the Tunnel-in-the-sky Display, Part One: Straight Tunnel Trajectories. The International Journal of Aviation Psychology, vol. 13, pp. 49-72. Ogata, K. (2006). Engenharia de Controle Moderno. Ed. 4. São Paulo: Pearson Prentice Hall. Tukey, J. W. (1977). Exploratory Data Analysis. Addison – Wesley. Visioli, A. (2010). Practical PID Control. Londres: Springer-Verlag. 5470
Baixar