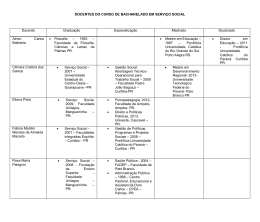
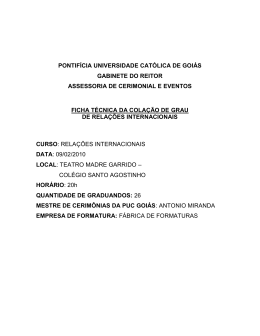
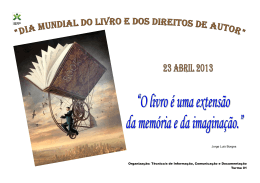
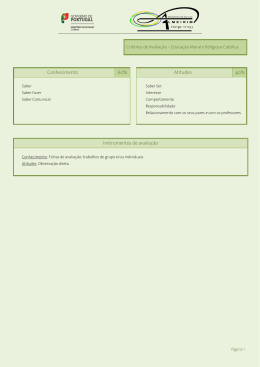
ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA Solução Parcial das Listas de Exercícios III e IV Soluções da lista de exercício III1 Soluções da lista de exercício IV2 Outros Exercícios das Apostilas Resolvidos Soluções da lista de exercício III 1. i. ii. iii. iv. As Figuras 1-5 apresentam diagramas de Bode de malha aberta de diferentes processos. Especificar a função de transferência de cada processo. Para uma entrada do tipo r(t) = sen(100t), qual ou quais processos apresentarão a maior amplitude no sinal de saída? O diagrama de Bode da Fig. 3 é o único que apresenta uma fase positiva. Qual o significado físico da fase positiva? Qual dos diagramas de Bode abaixo representa uma função de transferência instável. Fig. 1: Diagrama de Bode nº 1. 1 2 Exercícios revolvidos pelos alunos Rodrigo Nunes Conte e Rodrigo Scherer Correa Exercícios revolvidos pelos alunos Rodrigo Nunes Conte e Rodrigo Scherer Correa Professores: Luís Fernando Alves Pereira & José Felipe Haffner 1 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA 1° Passo: Função de transferência genérica. Podemos observar graficamente que o gráfico do diagrama de bode inicia com uma declividade de 20db / década o que evidencia a existência de um Pólo na origem, observamos também que a curva estabiliza na freqüência de w = 10rad / s daí podemos concluir a existência de um zero . Observe a fase nesta freqüência é -45º e a magnitude 23 dB. G1 ( s ) = k1 ( s + 10) s 2° Passo: Função de transferência p/r este caso. Cálculo do ganho Para determinar o ganho devemos escolher um ponto do diagrama de bode , por exemplo p/r a freqüência de w = 10 -1 rad / s temos um ganho de 60db 20 log10 G ( jw ) log10 G ( jw ) w = 0.1ad / s w = 0.1rad / s = = 60db 60db 20 60 G ( jw ) w = 0.1rad / s = 10 20 G ( jw ) w = 0 . 1 rad / s = 1000 ® um ganho de 60db é equivalente a uma amplificação de 1000 vezes o sinal de entrada Existem duas maneiras de solucionar o problema uma é substituindo s por jw na função de transferência genérica o que resultará em um função complexa cuja solução para uma dada freqüência w dará como resultado um módulo e um, ângulo de fase Ð ° , como estamos interessados apenas no ganho ignoramos a fase e teremos o módulo o qual igualaremos ao ganho encontrado (1000 p/r solução da igualdade p/r a freqüência de G1 ( jw ) = k1 G ( jw ) 1000 = w = 10 -1 rad / s ) e a w = 10 -4 rad / s dará o K que satisfaz a igualdade. ( jw + 10) jw w = 0.1rad / s = k1 (0.1 j + 10) k 0.1 j (0.1 j + 10) 0.1 j 1 k = 10 Como interessa somente o módulo temos que K=10, logo G1 ( s ) = 10 ( s + 10) s Professores: Luís Fernando Alves Pereira & José Felipe Haffner 2 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA Para verificar a validade da função de transferência aproximada, usa-se o matlab, » bode([10 100],[1 0]) Outro modo de resolver: ( + fácil ) Como estamos interessados apenas no módulo, e sabendo que o módulo de um número complexo é dado por Re 2 + Im 2 podemos aplicar esta propriedade a cada um dos fatores de G1 ( s ) . G1 ( jw ) = k1 ( jw + 10) \ jw 10 2 + (0.1) 2 G1 ( jw ) w = 0.1rad / s = k1 ( 0 2 + 0.12 ) 10 2 + (0.1) 2 1000 = k1 k1 = 10 ( 0 2 + 0 .1 2 ) Fig. 2: Diagrama de Bode nº 2. Professores: Luís Fernando Alves Pereira & José Felipe Haffner 3 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA G2 ( s) = k 2 ( s + 10) ( s + 1) 20 log10 G ( jw ) log10 G ( jw ) w = 0.1ad / s = w = 0.1rad / s = 20db 20db 20 20 20 G ( jw ) w = 0.1rad / s = 10 G( jw) w =0.1rad / s = 10 ® um ganho de 20db é equivalente a uma amplificação de 10 vezes o sinal de entrada 10 = k 2 (0.1)2 + 10 2 (0.1)2 + 12 K2 » 1 G2 ( s) = ( s + 10) ( s + 1) Para verificar a validade da função de transferência aproximada, usa-se o matlab, » bode([1 10],[1 1]) Fig. 3: Diagrama de Bode nº 3. Professores: Luís Fernando Alves Pereira & José Felipe Haffner 4 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA G3 ( s ) = k 3 (s + 1) (s + 10) 20 log10 G ( jw w = 0.1rad / s G ( jw = 0.1 w = 0.1rad / s 0.1 = k 3 12 + (0.1) = -20db 2 10 2 + (0.1) 2 k3 = 1 G3 ( s ) = (s + 1) (s + 10) Fig. 4: Diagrama de Bode nº 4. G4 ( s) = k 4 1 (s + 10) 20 log10 G ( jw w = 0.1rad / s = 0db Professores: Luís Fernando Alves Pereira & José Felipe Haffner 5 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA 1 = k4 1 10 2 + (0.1) 2 k 4 = 10 G4 ( s ) = 10 1 (s + 10) Fig. 5: Diagrama de Bode nº 5. O sobre-sinal mostra que ocorre ressonância na freqüência de w = 10rad / s e inversão de fase de 180° na mesma freqüência denuncia a presença de um pólo complexo em w = 10rad / s . 1 ® Ganho equivalente a amplitude do pico. 2x G ( jw = w r = freqüência de ressonância w r = 10 G5 ( s ) = v r2 s 2 + 2xw r + w r2 20 log10 G ( jw w =10 rad / s = 14db Professores: Luís Fernando Alves Pereira & José Felipe Haffner 6 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA G ( jw 5.01 = w =10 rad / s = 5.01 1 2x G5 ( s ) = x = 0 .1 100 s + 2 s + 100 2 ii. A maior amplitude de saída para uma entrada de r (t ) ganho de 20db . = sen (100t ) é dada por G1 ( s ) que dará um iii. O sinal saída está adiantado em fase em relação ao sinal de entrada. iv. G1 ( s ) representa um sistema instável para uma entrada do tipo degrau pois possui um pólo em s = 0. 2. Um determinado sistema tem a função de transferência senoidal descrita pela equação 1. Sabese para a freqüência w =100 rad/s, a magnitude do diagrama de Bode é de 0dB. G ( jw ) = K i. ii. iii. iv. ( jw + 1)(0.0001 jw + 1) (01 . jw + 1)(0.001 jw + 1) (1) A função de transferência completa, descrita em s. O valor do ganho K Esboce o diagrama de Bode do sistema descrito pela eq. 1. Quais são as diferenças entre a função de transferência senoidal, descrita pela equação 1 e a encontrada no item i. Fig. 6: Diagrama de Bode do sistema descrito pela equação (1). ii. Professores: Luís Fernando Alves Pereira & José Felipe Haffner 7 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA 100 2 + 1 100 2 + 10000 2 G ( jw w =100 rad / s = k G ( jw w =100 rad / s = 9.9019k 20 log10 9.9019k = 0db 100 2 + 10 2 100 2 + 1000 2 k = 0.10099 i. G ( s ) = 0.10099 ( s + 1)( s + 10000) ( s + 10)( s + 1000) 0.10099s 2 + 1010s + 1009.9 G (s) = s 2 + 1010s + 10000 comando do Matlab para visualizar o diagrama de Bode: bode ( [0.10099 1010 1009.9], [1 1010 1000] ) iv. A função de transferência descrito pela eq.1 é um caso particular daquela encontrada no item i. , a função de transferência descrita por eq.1 é válida para entradas do tipo sinal senoidal e fornece a resposta do sistema em regime permanente. Professores: Luís Fernando Alves Pereira & José Felipe Haffner 8 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA 3. Baseado no diagrama de Bode apresentado na Figura 7, identifique a função de transferência do sistema. Bode Diagrams 20 0 ) B d( e d ut i n g a M ); g e d( e s a h P -20 -40 200 100 0 -100 -200 -1 10 0 1 10 10 2 10 3 10 Frequency (rad/sec) Fig. 7: Diagrama de Bode do sistema a ser identificado. m G ( jw ) = k Õ ( zi ) 2 + w 2 Õ ( p j )2 + w 2 i =1 n j =1 20 log10 G ( jw ) = 20 log10 G ( jw ) = 1 2x Y ( jv ) decibeis U ( jv ) G ( jw ) w =100 rad / s = 6.309 20 log10 G ( jw ) w =100 rad / s = 16db 6.309 = 1 2x x = 0.07924 w r = 100rad / s Como o sistema começa com uma fase de 180º e vemos que não ocorre nada com o ganho até que se chegue a freqüência de 100rad/s vemos que trata-se de um sistema de fase não mínima onde temos um Professores: Luís Fernando Alves Pereira & José Felipe Haffner 9 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA Zero a direita e um pólo a esquerda espelhos tal que a contribuição em módulo de cada um deles se anule e a contribuição em fase do pólo subtraia a do Zero. G (s) ' = G (s) = 100 2 s 2 + 2(0.07924)(100 ) + 100 2 (s - 1) 10000 (s + 1) s 2 + 15.84s + 10000 Soluções da lista de exercício IV 13. Considere o diagrama de blocos de um processo apresentado na Figura 8. Dado o Lugar Geométrico das Raízes deste processo, apresentado na Figura 9, determinar: i. ii. iii. iv. v. vi. Qual a faixa de valor do ganho K para que este sistema seja estável? Qual é o valor do ganho K para que o sistema apresente uma oscilação senoidal sustentada na saída? Qual a freqüência da oscilação apresentada? Qual é o valor da maior freqüência natural amortecida ( wd ) , qual o valor do ganho K para ocorrer esta freqüência? Qual é o valor do ganho K para os pólos de malha fechada se encontrarem na posição P1 assinalada no gráfico. Qual é o tempo de estabilização e o sobresinal esperado quando os pólos de malha fechada se encontrarem na posição P1 assinalada no gráfico. A faixa de valores do ganho K > 0 em que o sistema não apresenta raízes complexas; R(s) U(s) E(s) + K - s+ 2 s(s - 2) Y(s) Fig. 8: Processo cujo LGR é apresentado na Figura 9. a. Aplicando-se o critério da estabilidade de Routh-Hurwtz: Y ( s) k ( s + 2) = R( s ) s ( s - 2) + k ( s + 2) logo, Q( s ) = s 2 + (k - 2) s + 2k = 0 Professores: Luís Fernando Alves Pereira & José Felipe Haffner 10 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA s2 s1 s0 1 2k (k - 2) 0 2k 0 P/r que o sistema possua todos os pólos localizados no semi- plano esquerdo de s (condição de estabilidade) , os elementos que compõem a primeira coluna da matriz deverão apresentar o mesmo sinal ( k - 2) > 0 K >2 b. p/r que o sistema apresente uma oscilação senoidal sustentada o coeficiente de amortecimento ( x ) deve ser NULO, pois fazendo x = 0 em 4 Þ t s = ¥ , isto xv n ocorre na origem do plano s. G (s) H ( s) = k 1= k (-2) 2 + 2 2 2 22 + 22 (-2) 2 + 2 2 2 22 + 22 p/r que o ponto de teste pertença ao LGR G ( s ) H ( s ) =1 k=2 iii. A maior freqüência natural amortecida w d = w n 1 - x 2 ocorre no ponto de teste ‘s’ conforme nos mostra a figura abaixo em que v d =2.8 rad/s. Fig 9: LGR do diagrama de blocos da Fig. 8. Professores: Luís Fernando Alves Pereira & José Felipe Haffner 11 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA k= 4 2 + 2.8 2 - 2 2 + 2.8 2 2.8 k=6 iv. k= 42 + 22 62 + 22 2 2 + -2 2 k = 10 v. w n = - 4 2 + ( -2 ) 2 w n = 4.47 xw n = -4 t s (2%) = Mp = e - x = 0.894 4 xw n x 1-x 2 p t s = 1s Mp = 1.89 * 10 -3 vi. Se analisarmos o movimento dos pólos em malha fechada a medida que se aumenta o ganho k como é representado na figura acima calculamos o ganho no ponto a partir do qual a função de transferência passa a ter pólos complexos então temos: Professores: Luís Fernando Alves Pereira & José Felipe Haffner 12 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA k= (0.8)(1.2) 0 < k < 0.342 2.8 Calculamos o ganho no ponto a partir do qual a função de transferência deixa de ter pólos complexos temos: k= (4.8)(6.8) 2.8 k > 11.6571 (0 < k < 0.342) U (k > 11.6571) Fazendo G (s) = dG ( s ) =0 d (s + 2 ) (s ( 2 - 2s ) ) ( ds æç s 2 - 2s ×1 - (s + 2) × (2s - 2) ö÷ =0 2 ÷ d ç s 2 - 2s è ø ) ds = s 2 - 2s - 2s 2 - 4 s + 2s + 4 = 0 d ds = - s 2 - 4s + 4 = 0 s Cujas raízes são: s1 = 0,828 e s 2 = -4,828 Deve-se observar que na faixa de 0 < K < 0.342apesar da função de transferência de malha fechada ter pólos reais, o sistema é instável pois os pólos são positivos. 14. O sistema apresentado na Figura 10 representa um sistema de controle de posição operando em malha-fechada onde é utilizado um controlador do tipo proporcional com ganho K. R(s) E(s) + U(s) K - 10(s + 2) s(s + p)(s2 + 2s + 4) Y(s) Fig. 10: Sistema de terceira ordem operando em malha-fechada. Professores: Luís Fernando Alves Pereira & José Felipe Haffner 13 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA i. Para p = 4, traçar o LGR completo do para este sistema destacando todos os pontos relevantes. Os pontos relevantes consistem: a. b. c. O traçado das assíntotas. A determinação dos pontos de ramificação (entrada e saída) e seus respectivos ganhos. Os ângulos de partida dos pólos complexos em malha aberta e nos ângulos de chegada nos zeros complexos em malha aberta. O ganho critico, e a localização dos pólos em malha fechada para este ganho. O desenho completo do LGR. d. e. Obs: Só devem ser feitos os itens necessários em função do sistema de controle em questão. ii. iii. Se p = 10, o ganho critico aumenta ou diminui? Justifique sua resposta. Qual é o erro de regime de saída deste sistema? a. Para um sinal de entrada do tipo degrau unitário. b. Para um sinal de entrada do tipo rampa i. (a) Traçado das assíntotas: g = ± (1 + 2h)180 o n-m g = 180 o = 60 o 3 s0 = onde h= 0,1,2,3... g = n n i =0 i =0 540 o = 180 o 3 å Re( pi ) - å Re( zi ) n-m s0 = g = 900 o = -60 o 3 (-1 - 1 - 4) - (-2) = -1 4 -1 Professores: Luís Fernando Alves Pereira & José Felipe Haffner 14 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA Obs.: O centróide pode estar em qualquer lugar no eixo real não sendo necessário o centróide pertencer ao LGR. (b) pontos de ramificação: dG ( s ) H ( s ) =0 ds ö d ( s) æ 10( s + 2) çç ÷=0 2 d è s ( s + 4)( s + 2s + 4) ÷ø 7 s 3 + 54s 2 + 48s + 32 (7s 3 + 12s 2 + 16s ) 2 =0 7 s 3 + 54 s 2 + 48s + 32 = 0 G (s) = raízes; - 0.45444 ± 0.68206 j e - 6.805 10 s + 20 s + 6 s 3 + 12 s 2 + 16 s 4 →Não há pontos de ramificação (c) Ângulo de partida dos pólos complexos a malha aberta: cos f1 = Ca Hip cos f1 = 0.4472 cos f1 = 1 2 1 + 22 f1 = 63.43 ° q 1 = 90 ° Professores: Luís Fernando Alves Pereira & José Felipe Haffner 15 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA cos q 2 = 3 2 3 +2 2 cos q 2 = 0.8320 q 2 = 33.69 ° 63.43 ° - 90 ° - 33.69 ° = -60.26 ° (d) Y (s) K10(s + 2) = 2 R ( s ) s(s + 2) s + 2s + 4 + k10(s + 2) ( ) Q( s ) = s 4 + 6 s 3 + 12s 2 + s (16 + 10k ) + 20k = 0 s4 1 12 20k s3 6 6(12 ) - 1(16 - 10k ) 6 - 100k 2 - 320k + 896 56 - 10k 16 + 10k 6(20k ) - 0(12 ) 6 0 0 / / s 2 s1 56 - 10k ³ 0 k ³ 5.6 æ - 100k 2 - 320k + 896 ö ç ÷³0 ç ÷ k 56 10 è ø -4.99 £ k £ 1.79 Ganho crítico K=1.79 Y (s) K10(s + 2) = R ( s ) s (s + 2) s 2 + 2s + 4 + (1.79 )(10 )(s + 2) ( ) Y (s) K10(s + 2) = 4 3 R( s ) s + 4s + 8s 2 + 25.9s + 3.58 Pólos de Malha fechada: -0.1442 , ±2 j e -3.67 (e) Comando do Matlab: rlocus ( [10 20],[1 6 12 16] ) Professores: Luís Fernando Alves Pereira & José Felipe Haffner 16 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA ii. Fazendo p=10 Y (s) K10(s + 2) = R( s ) s (s + 10 ) s 2 + 2 s + 4 + k10(s + 2 ) ( ) Y (s) K10(s + 2 ) = 4 3 R ( s ) s + 12 s + 24 s 2 + (40 + 10k )s + 20k s4 s3 s2 s1 1 12 12(24 ) - 1(40 + 10k ) 12 - 100k 2 - 392k + 9920 248 - 10k 24 20k 40 + 10k 0 12(20k ) - 0(1) 0 12 / / 248 - 10k ³ 0 k £ 24.8 -12.11 £ k £ 8.19 æ - 100k 2 - 392k + 9920 ö ç ÷³0 ç ÷ k 248 10 è ø Ganho crítico K=8.19 → O Ganho crítico aumenta Professores: Luís Fernando Alves Pereira & José Felipe Haffner 17 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA iii. Erro p/r sinal tipo degrau unitário: æ ö K10(s + 2) ÷=¥ Kp = limçç s ®0 s(s + 2 ) s 2 + 2 s + 4 + k10(s + 2) ÷ è ø ( Erro = ) 1 = 0 Para 0 < K < 24.8 1+ K p Erro = ¥ para K > 24.8 Erro p/r sinal tipo rampa: æ ö K 20 1 K10(s + 2) ÷÷ = = K v = lim sçç 2 s ®0 ( ) ( ) + + + + + s s 2 s 2 s 4 k 10 s 2 è ø K160 8 ( Erro = ) 1 = 8 Para 0 < K < 24.8 Kv Erro = ¥ para K > 24.8 15. Considerando o diagrama de blocos de um processo apresentado na Figura 11, onde n = 0, determinar: i. ii. iii. iv. v. Qual é a faixa de valor do ganho K para que este sistema seja estável? Qual é o valor do ganho K para que o sistema apresente uma oscilação senoidal sustentada na saída? Qual a freqüência da oscilação apresentada? Qual é o erro de regime do sinal de saída y(t), para uma entrada do tipo degrau unitário? \ Qual deve ser o valor de n para o sistema ter erro de regime nulo para uma entrada do tipo degrau unitário? \ Quais são as condições necessárias para aplicar as constantes de erro de regime (Kp, Kv, Ka) para obter diretamente o erro de regime do sinal de saída y(t)? \ R(s) E(s) + U(s) K - 10 s n ( s + 1)( s + 2) 2 Y(s) Fig. 11: Diagrama de blocos de um sistema de controle. i. Professores: Luís Fernando Alves Pereira & José Felipe Haffner 18 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA Y ( s) 10k = 3 2 R( s ) s + 5s + 8s + (10k + 4) s3 s2 s1 s0 1 5 36 - 10k 5 4 + 10k 8 0 (4 + 10k ) 0 / / / / 36-10k > 0 36>10k k<3.6 4+10k>0 K>-4/10 ii. p/r k=3.6 -4 £ k £ 3.6 ® p/r que o sistema seja estável 10 Y ( s) 36 = 3 2 R( s ) s + 5s + 8s + 40 raízes do denominador: ± 2.83 j e - 5 logo : w n = 2.83rad / s Professores: Luís Fernando Alves Pereira & José Felipe Haffner 19 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA iii. kp = lim G ( s ) kp = s ®0 10k = 2 .5 k ( s + 1)( s + 2) 2 e(¥ ) = 1 1 + 2 .5 k Verificar a estabilidade iv. æ 1 ö 10k ÷÷ = y (¥) l im çç s n 2 s ®0 è s s ( s + 1)( s + 4s + 4) + 10k ø æ Y ( s ) ö 10k ÷= =1 s ®0 R ( s ) ÷ è ø 10k n=1 pois n=1 na função de transferência de malha fechada tem-se que limçç logo: Erro = 1 - Y (¥) Erro = 1 - 1 = 0 Verificar a estabilidade 16. O sistema apresentado na Figura 12 representa um sistema de controle operando em malhafechada onde é utilizado um controlador do tipo proporcional com ganho K. R(s) E(s) + U(s) K - ( s + 4) s ( s + 2)( s + 10) Y(s) Fig. 12: Sistema de terceira ordem operando em malha-fechada. Professores: Luís Fernando Alves Pereira & José Felipe Haffner 20 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA i. Traçar o LGR completo do para este sistema destacando todos os pontos relevantes. Os pontos relevantes consistem: a. b. c. d. e. O traçado das assíntotas. A determinação dos pontos de ramificação (entrada e saída) e seus respectivos ganhos. Os ângulos de partida dos pólos complexos em malha aberta e nos ângulos de chegada nos zeros complexos em malha aberta. O ganho critico, e a localização dos pólos em malha fechada para este ganho. O desenho completo do LGR. Obs: Só devem ser feitos os itens necessários em função do sistema de controle em questão. ii. Qual a faixa de valores do ganho K, para o sistema não apresentar sobresinal na resposta temporal y(t)? iii. Quais são as condições necessárias para um ponto qualquer do plano s ser uma solução possível c dos pólos em malha fechada do sistema apresentado na Fig. 20? i. (a.) Traçado das assíntotas: s0 = g n m i =1 l =1 å Re( pi ) - å Re(z l ) n-m ( 1 + 2h )180 ° =± n-m g =± → determinação do centróide (-2 - 10) - (-4) = -4 s0 = 2 180 ° = ±90° 2 (b.) Os pontos onde a derivada da função de transferência é igual a zero são os pontos de entrada e saída do Lugar Geométrico das Raízes (LGR). ( ) ( s 3 + 12 s 2 + 20 s 1 - (s + 4) 3s 2 + 24 s + 20 d æ s+4 ö = = 0 ç 3 ÷ 2 ds è s + 12 s 2 + 20 s ø s 3 + 12 s 2 + 20 s ( ) ) Os valores que anulam a derivada são as raízes da equação do numerador: = s 3 + 12s 2 + 48s + 40 = 0 Raízes: -1.11 → é ponto de saída do LGR -5.44 ± 2.49 j → Não é ponto de entrada/saída do LGR Ganho no ponto de saída do LGR. k= (2 - 1.1155)2 + 0 0 (1.1155)2 + 0 2 (4 - 1.1155)2 + 0 2 Professores: Luís Fernando Alves Pereira & José Felipe Haffner 21 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA k = 2.0342 (c.) Caso houvessem pólos complexos a seguinte equação daria o ângulo no ponto de partida: Caso houvessem zeros complexos o ângulo no ponto de chegada ao zero complexo seria dado pela mesma equação. (d.) Função de transferência de malha fechada: Y (s) k (s + 4 ) = R ( s ) s (s + 2 )(s + 10 ) + k (s + 4) Q( s ) = s 3 + 12 s 2 + (k + 20 )s + 4k = 0 De acordo com o critério da estabilidade de Routh-Hurwitz para que um sistema seja estável a primeira coluna da matriz deve possuir o mesmo sinal. s3 s 2 s 1 s0 1 k + 20 12 12(k + 20 ) - 4k 12 4k 4k 12k + 240 - 4k > 0 0 0 e 4k > 0 Logo o sistema é sempre estável para K > 0. i. Para que a variável de saída não apresente sobresinal x > 1 , ou seja os pólos devem ser reais. Logo : 0 < k < 2.0342 Professores: Luís Fernando Alves Pereira & José Felipe Haffner 22 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA iii. kG ( s ) H ( s ) = 1 » rlocus([1 4],[1 12 20 0]) 20 15 10 5 si x A g a m I 0 -5 -10 -15 -20 -20 -15 -10 -5 0 Real Axis 5 10 15 20 17. Especifique a função de transferência G(s) para que a resposta temporal y(t) de um sistema de controle definido pela Figura 13 seja igual a resposta temporal mostrada pela Figura 14. i. A função de transferência G(s) deve ser de segunda ordem, possuir pólos reais e o sistema não deve apresentar erro em regime quando submetido a uma entrada do tipo degrau. A entrada u(t) para gerar a Figura 14 é do tipo degrau unitário. ii. Qual é a função de transferência de malha fechada. Calcule o tempo de estabilização utilizando os parâmetros da função de transferência de malha fechada. iii. Qual é o erro de regime para a função de transferência encontrada no item i, para uma entrada do tipo rampa unitária. Fig. 13: Sistema de controle. Professores: Luís Fernando Alves Pereira & José Felipe Haffner 23 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA Fig. 14: Resposta temporal do sistema de controle da Fig. 21 para uma entrada do tipo degrau. ii. Mp = e ln (0.2 ) = æ x -çç 2 è 1-x æ x - çç ç 1-x 2 ln e è t s (2%) = 0 .6 = ö ÷p ÷ ø 0 .2 = ö ÷p ÷÷ ø æ x - çç ç 1-x 2 e è ö ÷p ÷÷ ø æ x ç ln (0.2) = ç ç 1-x 2 è ö ÷ ÷÷p ø x = 0.4559 4 xw n 4 (0.4559 )w n w n = 14.62rad / s w n2 Y (s) → Função de transferência de Malha Fechada = 2 R ( s ) s + 2xw n s + w n2 Y (s) (14.62)2 = R ( s ) s 2 + 2(0.4559 )(14.62 )s + (14.62 )2 iii. erro infinito Professores: Luís Fernando Alves Pereira & José Felipe Haffner 24 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA 18. Considere o sistema de controle da Figura 15, com a função de transferência G(s) dada pela eq. 2. Fig. 15: Sistema de controle realimentado. G(s) = i. K(s 2 + 2s + 101) s(s + 2)(s + 4)(s + 20) (2) Traçar o LGR completo do para este sistema destacando todos os pontos relevantes. Os pontos relevantes consistem: a. O traçado das assíntotas. b. A determinação dos pontos de ramificação (entrada e saída) e seus respectivos ganhos. c. Os ângulos de partida dos pólos complexos em malha aberta e nos ângulos de chegada nos zeros complexos em malha aberta. d. O ganho critico, e a localização dos pólos em malha fechada para este ganho. e. O desenho completo do LGR. Obs: Só devem ser feitos os itens necessários em função do sistema de controle em questão. ii. Determinar a faixa de ganho K que o sistema é estável. i.(a) m n å Re( p ) - å Re(z ) l i s0 = i =1 l =1 s0 = (0 - 2 - 4 - 20 ) - (- 1)(- 1) = -12 n-m (1 + 2h )180 ° g = ± 180 ° = ±90 ° g =± 2 n-m 2 Professores: Luís Fernando Alves Pereira & José Felipe Haffner 25 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA (b) = ö ds æ s 2 + 2s + 101 ÷=0 çç 4 3 2 s è s + 26s + 128s + 160s ÷ø (s 4 ) ( )( + 26s 3 + 128s 2 + 160 (2s + 2) - s 2 + 2 s + 101 4s 3 + 78s 2128s + 160 (s 4 + 26s 3 + 128s 2 + 160 ) 2 ) Os valores que tornam a derivada nula são as raízes do numerador: s 5 + 16 s 4 + 254 s 3 + 3987 s 2 + 12928s + 8080 = 0 Raízes: -0.8238 ® Ö ok -3.10® / Não -13.8197®/ Não 0.8766±15.0801 j®Ö ok n Õp i k= i =1 m Õz l l =1 Os zeros não se deslocam os pólos é que se deslocam em direção aos zeros portanto teremos somente um ângulo de chegada nos zeros complexos em malha aberta. Professores: Luís Fernando Alves Pereira & José Felipe Haffner 26 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA k= (0.82)(2 - 0.82)(4 - 0.82)(20 - 0.82) = 5.9 ( (1 - 0.82 + 10 )) 2 2 2 (c) Ângulo de partida: cosq1 = Ca Hip cosq 1' = q1 = 180° - 84.28° cos q 2 = cos q 3 = cos q 4 = 1 2 2 2 2 2 10 + 19 10 + (- 1) 2 q1' = 84.28° q1 = 95.71 q 2 = 84.28° 10 + 1 3 10 + 3 19 1 2 q 3 = 73.3° 2 q 4 = 27.75° q 5 = 90 - 191.04° (e) Desenho completo do LGR: Professores: Luís Fernando Alves Pereira & José Felipe Haffner 27 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA 19. Considere o diagrama de blocos de um processo apresentado na Figura 16. A função de transferência G(s) é: s 2 + 4s + 104 G( s ) = s( s + 2 )( s + 4 ) Dado o Lugar Geométrico das Raízes deste processo, apresentado na Figura 17, determinar: i. ii. iii. iv. v. (3) O ganho K para que os pólos deste sistema estejam localizados na posição marcada. ( aproximadamente -1±j10); A faixa de valores do ganho K > 0 em que o sistema apresenta comportamento estável; A faixa de valores do ganho K > 0 em que o sistema não apresenta raízes complexas; Qual o maior percentual de sobresinal que pode ocorrer na resposta temporal y(t) para uma entrada do tipo degrau unitário, para K > 0. Qual o erro de regime deste sistema para uma entrada do tipo degrau unitário. Fig. 16: Processo cujo LGR é apresentado na Figura 17. Fig. 17: LGR de um sistema de controle da Figura 16. Professores: Luís Fernando Alves Pereira & José Felipe Haffner 28 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA Obs.: Notar que o eixo das abscissas do LGR da Figura 17 não esta na mesma escala que o eixo das ordenadas. i. 10 2 + 3 2 10 2 + 12 10 2 + 1 k= 1 12 + 20 2 ( k = 52.66 ) Y ( s) k s 2 + 4s + 104 = R( s ) s (s + 2)(s + 4) + k s 2 + 4 s + 104 ii. ( Q( s ) = s + s (k + 6) + s (4k + 8) + 104k 3 s3 s2 s1 s0 ) 2 1 (k + 6) (4k 2 - 72k + 48) (k + 6) 104k (4k + 8) 104k 0 0 / / / / (- 6 £ k £ 0.6933) È (17.31 £ k ) iii. k = 1 ×1 × 3 10 2 + 12 k = 0.03 iv. Mp = e æ x -çç 2 è 1-x ö ÷p ÷ ø e 0 = 1 = Mp máximo Mp = 100% → x somente será ZERO quando um dos pólos de malha fechada estiver localizado na origem 1 k (s 2 + 4 s + 104) =1 v. lim s s ®0 s s(s + 2)(s + 4) + k (s 2 + 4s + 104) Erro = 1 - y (¥) = 1 - 1 = 0 Outra maneira de fazer: s 2 + 4s + 104 =¥ s ® 0 s (s + 2 )(s + 4 ) k p = l im Erro = 1 1 = =0 1+ k p 1+ ¥ Professores: Luís Fernando Alves Pereira & José Felipe Haffner 29 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA Outros Exercícios das Apostilas Resolvidos 1. Considerando o diagrama de Bode apresentado na Figura 18 determinar: i. ii. iii. A função de transferência do processo: O sinal de saída do processo considerando como sinal entrada r(t) = 10 sen 40t; O sinal de saída do processo considerando como sinal entrada r(t) = 10 sen 20000t; Bode Diagrams 0 ) B d( e d ut i n g a M ); g e d( e s a h P -50 -100 200 150 100 50 0 1 10 2 10 3 4 10 10 5 10 Frequency (rad/sec) Fig. 18: Diagrama de Bode do processo a ser identificado. i. 1°Passo: Calculo do ganho onde ocorre o pico no gráfico . G ( jw ) w = 40 rad / s 20log10 G ( jw ) = 2x Þ Ganho onde ocorre o pico w =40 rad / s log10 G ( jw ) w = 40 rad / s = = -20db - 20db 20 Note que o pico p/r baixo evidencia a existência de um zero duplo na freqüência de 40rad/s, se fosse um pólo duplo teríamos G ( jw ) = Professores: Luís Fernando Alves Pereira & José Felipe Haffner 1 2x e o pico seria p/r cima. 30 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA G ( jw ) w =40 rad / s = 10 -20 20 2x = 0.1 x = 0.05 2° Passo: Esboço da G(s) Função de transferência do processo: G (s) = k s 2 + 2xw r s + w r2 (s + p )2 Sabe-se que w r = freqüência de ressonância ® = freqüência onde ocorre o pico w r = 40rad / s . Note que na freqüência w = 4000rad / s o gráfico que vinha subindo a razão de 40db/década estabiliza portanto conclui-se que hà um pólo duplo em w = 4000rad / s . (s + 4000)2 = s 2 + 8000 s + 16000000 G (s) = K s 2 + 4s + 1600 s 2 + 8000s + 16000000 Substituindo-se s por G ( jw ) = k jw na equação acima, tem-se ( jw ) 2 + 4 jw + 1600 jw 2 + 8000 jw + 16000000 Como se trata de uma função complexa para uma dada freqüência módulo e um ângulo de fase (Ð ) . w teremos como resultado um ° 3° Passo: Encontrar o ganho K, para isso deveremos escolher algum ponto do diagrama de bode, por exemplo se o ponto encolhido for w = 10rad / s veremos no diagrama de bode que este apresenta um ganho de - 80db 20 log10 G ( jw ) log10 G ( jw ) w =10 rad / s w =10 rad / s = = -80db - 80db 20 -80 G ( jw ) w =10 rad / s = 10 20 G ( jw ) w =10 rad / s = 10 -4 Substituindo na função acima: Professores: Luís Fernando Alves Pereira & José Felipe Haffner 31 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA 10 -4 2 j10) + 40 j + 1600 ( =k ( j10)2 + 80000 j + 16000000 (1500.53, Ð1.53 ) Resolvendo a equação do denominador tem-se (16000100, Ð0.29 ) ° Resolvendo a equação do numerador tem-se ° 10 - 4 = k 1500.53 16000100 G ( jw ) = 1.07 G ( s ) = 1.07 k = 1.07 » 1 ( jw ) 2 + 4 jw + 1600 jw 2 + 8000 jw + 16000000 s 2 + 4s + 1600 s 2 + 8000s + 16000000 Comando do Matlab: » bode([1.07 4.28 1712],[1 8000 16000000]) B ode Diagram s 50 P hase (deg); M agnitude (dB) 0 -50 -100 200 150 100 50 0 1 10 10 2 10 3 10 4 10 5 Frequenc y (rad/sec ) Professores: Luís Fernando Alves Pereira & José Felipe Haffner 32 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA Outra forma de resolver: Como o que nos interessa é apenas o módulo ° ignorando o ângulo de fase ( Ð ) , para um número complexo sabemos que o módulo é dado módulo por G ( jw ) podemos resolver G ( jw ) somente em função do Re 2 + Im 2 . Escrevendo G ( jw ) na forma fatorada teremos uma função do tipo: G ( jw ) = k ( jw + z1 )( jw + z 2 )L ( jw + z n ) ( jw + p 2 )L ( jw + p m ) Re 2 + Im 2 para cada fator da função G ( jw ) onde podemos aplicar a propriedade do módulo representada acima o que resultaria no seguinte w 2 + z12 w 2 + z 22 L w 2 + z m2 G ( jw = k w 2 + p12 w 2 + p22 L w 2 + pn2 Note através do gráfico do LGR que a fórmula é o quociente entre o produto das distâncias de cada um dos zeros a freqüência w considerada pelo produto dos pólos. ou m Õ (z ) 2 +w 2 i G ( jw ) = k i =1 n Õ (p ) 2 j +w 2 j =1 Zeros de G (s ) : - 2 ± 39.95 Pólos de G (s ) : - 4000 10 -4 =k - 4000 (39.95 - 10)2 + 10 2 (- 39.95 - 10)2 + 10 2 æç è ii. (- 4000) + 10 ö÷ ø 2 2 2 k = 0.9947 » 1. r (t ) = 10 sen 40t r (t ) = A sen wt 20 log10 G ( jw ) log10 G ( jw ) G ( jw ) w = 40 rad / s w = 40 rad / s = -100db w = 40 rad / s = 10 = 100 - 100 20 20 G ( jw ) w = 40 rad / s = 10 -5 Professores: Luís Fernando Alves Pereira & José Felipe Haffner y (t ) = 10 -5 sen 40t 33 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA iii. r (t ) = 10 sen 20000t r (t ) = A sen wt 20 log10 G ( jw ) log10 G ( jw ) G ( jw ) w = 20000 rad / s = w = 20000 rad / s w = 20000 rad / s = 10 0 = 0db 0 20 G ( jw ) w = 20000 rad / s = 1 y (t ) = 10 sen 20000t 2. O diagrama de Bode apresentado na Figura 19 é de um sistema de 2º ordem. A função de transferência deste sistema é definido pela equação 3. G( s) = Determinar: i. O valor da freqüência natural K × w n2 wn . O fator de amortecimento x . O ganho K. O que acontece com o sinal de saída este sistema se for imposto que ii. iii. iv. (3) s 2 + 2xw n s + w n2 x = 0. Fig. 19 : Diagrama de Bode utilizado no exercício 2. ii. Em w entrada = w resonância ® G ( jw r = 1 2x Professores: Luís Fernando Alves Pereira & José Felipe Haffner 34 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA w r2 G (s) = 2 s + 2xw r s + w r2 w r = 100rad / s 20 log G ( jw ) G ( jw ) w =100 rad / s w =100 rad / s 1 = 5.0011 2x = 14db = 5.0011 x = 0.1 2xw n = 2(0.1)(100) = 20 G (s) = k 10000 2 s + 20 s + 10000 Como o ganho DC pode ser obtido do diagrama de Bode, ou seja: 20 log G ( jw ) G ( jw ) w = 0.1rad / s w = 0.1rad / s = 20db = 10 Ganho DC = lim s ®0 K10000 = K logo K =10 s + 20 s + 10000 2 G ( s ) = 10 10000 s + 20 s + 10000 2 3. Considere o seguinte sistema de controle: R(s) + E(s) K U(s) 1/s(s+10) Y(s) _ Fig. 20: Sistema de controle i. ii. iii. Determinar o valor de K do controlador para que o sistema operando em malha-fechada apresente a resposta temporal apresentada na Fig. 21, quando a entrada é um degrau unitário. Para qual a faixa de ganho K em que a resposta temporal y(t) não apresenta sobresinal. Qual o erro de regime deste sistema para uma entrada do tipo rampa unitária? Professores: Luís Fernando Alves Pereira & José Felipe Haffner 35 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA Step Response 1.4 1.2 Amplitude 1 0.8 0.6 0.4 0.2 0 0 0.2 0.4 0.6 0.8 1 1.2 Time (sec.) Fig. 21: Resposta temporal do sistema apresentado na Figura 20. i. Função de transferência de malha fechada: k Y ( s) s ( s + 10) = k R(s) 1+ s ( s + 10) æ ln (Mp ) ö x=ç ÷ è p ø 2 Y ( s) K = R( s ) s ( s + 10) + k x x = 1+ x 2 x = 0.262 1 + 0.262 x = 0.4559 x = 0.262 t s (2% ) = 0.8 = æ ln (0.2 ) ö x=ç ÷ è p ø 4 0.4559w n w n = 11rad / s Y ( s) 121 = 2 R( s ) s + 10s + 121 Comparando-se com a equação genérica conclui-se que a função de transferência de malha aberta concluise que o ganho k = 121 . Professores: Luís Fernando Alves Pereira & José Felipe Haffner 36 ANÁLISE DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA ii. Comando do Matlab: rlocus([1],[1 10 0]) Baseado no diagrama do lugar das raízes LGR podemos concluir que o sistema não apresentará sobresinal enquanto os pólos de malha fechada forem somente de natureza real. k= 5 .5 = 25 1 0 £ k £ 25 iii. k v = lim s s ®0 ERRO = 1 k = 0.1 s s (s + 10) 1 1 10 = = k v 0.1k k 20 15 10 Imag Axis 5 0 -5 -10 -15 -20 -20 -15 -10 -5 0 Real Axis Professores: Luís Fernando Alves Pereira & José Felipe Haffner 5 10 15 20 37
Download