GISÉLE APARECIDA XAVIER
OTIMIZAÇÃO MULTIOBJETIVO
NO CONTROLE INTEGRADO DO
VETOR DA DENGUE
Belo Horizonte
2012
CENTRO FEDERAL DE EDUCAÇÃO
TECNOLÓGICA DE MINAS GERAIS
Diretoria de Pesquisa e Pós-Graduação
Programa de Mestrado em Modelagem
Matemática e Computacional
OTIMIZAÇÃO MULTIOBJETIVO
NO CONTROLE INTEGRADO
DO VETOR DA DENGUE
Dissertação de Mestrado submetida ao Programa
de Pós-Graduação em Modelagem Matemática e
Computacional, como parte dos requisitos exigidos
para a obtenção do título de Mestre em Modelagem Matemática e Computacional.
Aluna: Giséle Aparecida Xavier
Orientadora: Profa . Dra . Elizabeth Fialho Wanner
Co-Orientador: Prof. Dr. Rodrigo Tomás Nogueira Cardoso
Belo Horizonte - MG
Dezembro de 2012
Agradecimentos
Quem irá me valer?
São pessoas, é a caminhada
Quem irá me valer?
São meus sonhos no pó da estrada
Quem irá me valer?
É o sorriso que guardo comigo
Quem irá me valer?
É o segredo de fazer amigos...
(Milton Nascimento , Fernando Brant)
A caminhada tem sido intensa. Repleta de pessoas que contribuem para as
realizações. Infelizmente, não conseguirei citar o nome de todas. Porém agradeço à
todos que me ajudaram direta ou indiretamente á chegar até aqui.
Em especial, agradeço à Deus, pai, companheiro e fiel amigo.
Aos meus familiares, principalmente minhas tias que me educaram.
Aos amigos que me deram apoio, ânimo, força e coragem sempre.
Aos colegas e professores da graduação, companheiros e motivadores dos estudos.
Aos colegas do mestrado: alunos, professores e demais colaboradores.
Às meninas da república que formamos em Belo Horizonte. Juntas, pudemos
compartilhar conhecimento, diversão, aflições, conquistas, enfim, crescemos ainda
mais.
Aos meus orientadores Elizabeth Wanner e Rodrigo Cardoso, por acreditarem mais
em mim, do que eu mesma. Por serem pacientes, perseverantes e amigos. Obrigada
pelos ensinamentos de vida e acadêmicos.
Ao meu marido Thiago, companheiro e incentivador, pelo apoio e compreensão.
Com o teu amor sou mais feliz e, consequentemente, essa jornada se torna mais
leve.
À família Viana que me acolheu de braços abertos.
À CAPES pelo apoio financeiro.
Ao meu anjo, minha filha Elis Indira. Agradeço por tê-la a cada dia.
ii
Resumo
A dengue atualmente é uma das doenças de maior importância no âmbito da
saúde pública de todo o mundo. Consequentemente, é uma das doenças infecciosas
que mais demanda estudos e pesquisas. Dentre estes estudos, há diferentes modelos
matemáticos que descrevem e analisam a evolução dos vetores desta doença. Uma
das principais formas de controle de vetores da dengue no Brasil é realizada através
de uso intenso de produtos químicos, como inseticidas. Outra forma de controle de
vetores é a liberação de mosquitos machos estéreis no ambiente natural a fim de
alterar seu processo de reprodução. Entretanto, um dos problemas para desenvolver
as formas de controle é a disponibilidade de recursos financeiros. Neste trabalho, serão propostas estratégias de otimização de custos de controle integrado por meio de
inseticida e produção de mosquitos machos estéreis. A otimização será desenvolvida
por meio da abordagem mono-objetivo ou escalar, significando que a função-objetivo
é um número real, e através da abordagem multiobjetivo, propondo mais de uma
função a ser simultaneamente otimizada. Para tal, serão utilizados algoritmos genéticos, que são métodos computacionais de busca, baseados nos mecanismos de
evolução natural e na genética. Os resultados finais mostram um conjunto de valores ótimos que auxilia os gestores no manejo de inseticida e liberação de mosquitos
estéreis para combater a dengue.
PALAVRAS-CHAVE: Dengue, Inseticidas, Mosquitos Estéreis, Otimização, Algoritmos Genéticos.
iii
Abstract
Nowadays, the tropical disease dengue is one of the most important disease in the
public health system over the world. As a result, this disease is one of the infectios
disease that most demands studies and researches. There are different mathematics
models that describe and analyze the dengue’s vectors evolution. In Brazil, one of
the main way of dengue’s vectors control is the intense use of chemical products
such as insecticide. Another way of dengue’s vectors control is the liberation of
sterile male mosquitos in their natural habitat in order to change their reproduction
procces. However, the problem to develop the ways of control is the readiness of
financial resources. Estrategic proposals of integrated cost control optimization by
insecticide and the production of sterile male mosquitos will be showed in this work.
The optimization will be developed by the mono-objective or scalar approach, wich
means that the objective function is a real number, and by the multiobjective, what
propose more than one function to be simultaneously optimizated. For that reason,
genetics Algorithms, that are computational methods of research based on natural
mechanisms of evolution and genetic, Will be used. The final results show a group
of great values that helps the managers in the use of insecticide and in the liberation
of sterile mosquitos to combat dengue.
KEY-WORDS: Dengue, Insecticide, Sterile Mosquitos, Optimization, Genetics
Algorithms.
iv
Sumário
1 Introdução
1.1 Objetivos . . . . . . . . . .
1.1.1 Objetivo geral . . . .
1.1.2 Objetivos específicos
1.2 Justificativa . . . . . . . . .
1.3 Organização do trabalho . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 Revisão Bibliográfica
2.1 Dengue . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 Aspectos históricos . . . . . . . . . . . . . . . .
2.1.2 Transmissão da doença . . . . . . . . . . . . . .
2.1.3 Mecanismos de controle da dengue . . . . . . .
2.2 Otimização Mono e Multiobjetivo . . . . . . . . . . . .
2.2.1 Otimização mono-objetivo ou escalar . . . . . .
2.2.2 Otimização multiobjetivo ou vetorial . . . . . .
2.3 Algoritmos Genéticos . . . . . . . . . . . . . . . . . . .
2.4 NSGA II - Nondominated Sorting Genetic Algorithm II
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
3
3
3
4
6
.
.
.
.
.
.
.
.
.
7
7
9
12
14
18
19
25
29
35
3 Modelo Matemático da Dengue
39
3.1 Modelo de Otimização . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Apresentação e Análise dos Resultados
4.1 Otimização do controle integrado do vetor da dengue
4.2 Resultados da Otimização Mono-objetivo . . . . . . .
4.2.1 Cenários utilizados por Thomé (2007) . . . . .
4.2.2 Estudo de outras possibilidades . . . . . . . .
4.3 Resultados da Otimização Multiobjetivo . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
50
50
53
54
73
80
5 Conclusões e trabalhos futuros
91
5.1 Trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
v
Referências
93
vi
Lista de Figuras
1.1
1.2
2.1
2.2
2.3
2.4
2.5
2.6
Situação da dengue no mundo em 2008. Em vermelho temos, as áreas
de risco de dengue no ano de 2008, segundo a Organização Mundial
de Saúde. Fonte: WHO, 2009, p. 3. . . . . . . . . . . . . . . . . . . .
Incidência anual de dengue no Brasil, por região. FONTE: SVS, 2011.
Exemplo de um mosquito Aedes aegypti. FONTE: (Brasil, 2010a) .
Sorotipos circulantes no Brasil em 2006. Fonte: Brasil, 2006. . . . .
Exemplo de otimização restrita de igualdade.Na Figura 2.3 são mostradas as curvas de nível da função objetivo quadrática f (x) e a reta
que representa a função da restrição h(x). O ponto x∗ , ótimo restrito
do problema, deverá passar pela reta e pela curva de nível mais aproximada á reta, sendo assim o melhor ponto factível que toca à região
factível. Ou seja, o ponto (0, 0) não é solução ótima desse problema.
Ele é apenas um ótimo irrestrito. . . . . . . . . . . . . . . . . . . .
Exemplo de otimização restrita de desigualdade. Na Figura 2.4 são
mostradas as curvas de nível da função objetivo linear f (x) e duas restrições: g1 (x) ≤ 0, isto é, valores pertencentes à reta e abaixo dela e,
g2 (x) ≤ 0, ou seja, pontos pertencentes à fronteira da circunferência
e ao interior dela. A região sombreada é a que atende simultaneamente à ambas restrições, ou interseção das regiões admissíveis. x∗ ,
ótimo restrito, deverá passar por essa região e pela curva de nível
mais próxima à mesma. . . . . . . . . . . . . . . . . . . . . . . . . .
Exemplo de gráfico de uma função, destacando máximos e mínimos
locais e globais. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exemplo geométrico de uma função côncava e convexa. Numa função
côncava, um segmento de reta unindo dois pontos, localiza-se abaixo
da função. Já numa função convexa, o segmento de reta localiza-se
sempre acima da função. . . . . . . . . . . . . . . . . . . . . . . . .
vii
1
4
. 8
. 11
. 20
. 21
. 22
. 22
2.7
2.8
2.9
3.1
3.2
3.3
3.4
3.5
4.1
4.2
4.3
4.4
4.5
4.6
4.7
Exemplo de solução dominada. Neste esboço é mostrado o ponto A,
B e C pertencente ao espaço dos objetivos, porém apenas B e C
pertencentes ao conjunto Pareto-ótimo. Um cone paralelo aos eixos
coordenados é colocado com vértice em B e outro em C (traços pontilhados). O ponto A está no interior dos dois cones, portanto, A é
dominado por B e C. . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Conjunto Pareto-otimo.Conjunto Pareto-ótimo representado em linha
contínua (Y ∗ ∈ Y). Isto é, as soluções eficientes estão entre yA e yB .
FONTE - Takahashi, 2007b. . . . . . . . . . . . . . . . . . . . . . . . 27
Cálculo da distância de multidão do NSGA-II. FONTE - Deb et al.,
2000. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Diagrama da dinâmica populacional da dengue com controle químico
e genético. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Liberação de inseticida e mosquitos machos estéreis. Nestes gráficos
obtidos por Thomé (2007), temos o eixo das abscissas referindo ao
tempo em dias, onde t = 120 e, o eixo das ordenadas à quantidade
de inseticida e à quantidade de mosquitos estéreis liberados respectivamente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
População na fase aquática. . . . . . . . . . . . . . . . . . . . . . . .
População de mosquitos fêmeas imaturas e mosquitos fêmeas fertilizadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
População de mosquitos machos naturais e mosquitos machos estéreis.
Comparação entre as populações na fase aquática para as constantes
do Cenário 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Comparação entre as populações de fêmeas imaturas e entre as populações de fêmeas fertilizadas do Cenário 1. . . . . . . . . . . . . .
Comparação entre as populações de machos naturais e entre as populações de machos estéreis do Cenário 1. . . . . . . . . . . . . . .
Espaço das variáveis obtido por meio das 30 soluções ótimas encontrada pelo AG com o cenário 1. . . . . . . . . . . . . . . . . . . . .
Histograma de frequência dos valores de J(u) após as 30 execuções
do AG com o cenário 1. . . . . . . . . . . . . . . . . . . . . . . . .
Histogramas de frequência dos valores de J(u) após as 30 execuções
do AG com o cenário 1. . . . . . . . . . . . . . . . . . . . . . . . .
Histogramas de frequência dos valores de J(u) após as 30 execuções
do AG com o cenário 1. . . . . . . . . . . . . . . . . . . . . . . . .
viii
44
47
47
48
48
. 55
. 56
. 56
. 57
. 57
. 58
. 59
4.8
4.9
4.10
4.11
4.12
4.13
4.14
4.15
4.16
4.17
4.18
4.19
4.20
4.21
4.22
4.23
4.24
4.25
4.26
Histogramas de frequência dos valores de J(u) após as 30 execuções
do AG com o cenário 1. . . . . . . . . . . . . . . . . . . . . . . . .
Comparação entre as populações na fase aquática para as constantes
do Cenário 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Comparação entre as populações de fêmeas imaturas e entre as populações de fêmeas fertilizadas do Cenário 2. . . . . . . . . . . . . .
Comparação entre as populações de machos naturais e entre as populações de machos estéreis do Cenário 2. . . . . . . . . . . . . . .
Espaço das variáveis obtido por meio das 30 soluções ótimas encontradas pelo AG com o cenário 2. . . . . . . . . . . . . . . . . . . . .
Histograma de frequência dos valores de J(u) após as 30 execuções
do AG com o cenário 2. . . . . . . . . . . . . . . . . . . . . . . . .
Comparação entre as populações na fase aquática para as constantes
do Cenário 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Comparação entre as populações de fêmeas imaturas e entre as populações de fêmeas fertilizadas do Cenário 3. . . . . . . . . . . . . .
Comparação entre as populações de machos naturais e entre as populações de machos estéreis do Cenário 3. . . . . . . . . . . . . . .
Espaço das variáveis obtido por meio das 30 soluções ótimas encontradas pelo AG com o cenário 3. . . . . . . . . . . . . . . . . . . . .
Histograma de frequência dos valores de J(u) após as 30 execuções
do AG com o cenário 3. . . . . . . . . . . . . . . . . . . . . . . . .
Comparação entre as populações na fase aquática para as constantes
do Cenário 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Comparação entre as populações de fêmeas imaturas e entre as populações de fêmeas fertilizadas do Cenário 4. . . . . . . . . . . . . .
Comparação entre as populações de machos naturais e entre as populações de machos estéreis do Cenário 4. . . . . . . . . . . . . . .
Espaço das variáveis obtido por meio das 30 soluções ótimas encontradas pelo AG com o cenário 4. . . . . . . . . . . . . . . . . . . . .
Histograma de frequência dos valores de J(u) após as 30 execuções
do AG com o cenário 4. . . . . . . . . . . . . . . . . . . . . . . . .
Comparativo da evolução populacional na fase aquática nos quatros
cenários. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Comparativo da evolução populacional das fêmeas imaturas nos quatros cenários. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Comparativo da evolução populacional das fêmeas fertilizadas nos
quatros cenários. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ix
. 59
. 60
. 61
. 61
. 62
. 63
. 64
. 65
. 65
. 66
. 66
. 68
. 68
. 69
. 70
. 70
. 71
. 71
. 72
4.27 Comparativo da evolução populacional dos machos naturais nos quatros cenários. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.28 Comparativo da evolução populacional dos machos estéreis nos quatros cenários. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.29 Espaços das variáveis obtidos por meio das 30 soluções ótimas encontrada pelo AG para os cenários 1 e 2. . . . . . . . . . . . . . . . . .
4.30 Espaços das variáveis obtidos por meio das 30 soluções ótimas encontrada pelo AG para os cenários 3 e 4. . . . . . . . . . . . . . . . . .
4.31 Espaço de variáveis após 50 execuções do AG para as constantes do
cenário5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.32 População na fase aquática - Cenário 5. . . . . . . . . . . . . . . . .
4.33 População de fêmeas imaturas e fertilizadas - Cenário 5. . . . . . .
4.34 População de machos naturais e estéreis - Cenário 5. . . . . . . . .
4.35 Espaço de variáveis após 50 execuções do AG para as constantes do
cenário 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.36 População na fase aquática - Cenário 6. . . . . . . . . . . . . . . . .
4.37 População de fêmeas imaturas e fertilizadas - Cenário 6. . . . . . .
4.38 População de machos naturais e estéreis - Cenário 6. . . . . . . . .
4.39 Conjunto Pareto-ótimo resultante das 10 execuções do NSGA-II para
o objetivo 4 com as constantes do cenário 1. . . . . . . . . . . . . .
4.40 Destaque de dois pontos no conjunto Pareto-ótimo resultante das 10
execuções do NSGA-II para o objetivo 4 com as constantes do cenário
1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.41 Ampliação mostrando os dois pontos destacados no conjunto Paretoótimo resultante das 10 execuções do NSGA-II para o objetivo 4 com
as constantes do cenário 1. . . . . . . . . . . . . . . . . . . . . . . .
4.42 Espaço de variáveis resultante das 10 execuções do NSGA-II para
objetivo 4 com cenário 1. . . . . . . . . . . . . . . . . . . . . . . . .
4.43 Dominância resultante das 10 execuções do NSGA com objetivo 4
para o cenário 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.44 Fronteira Pareto resultante das 10 execuções do NSGA-II para objetivo 4 com cenário 5. . . . . . . . . . . . . . . . . . . . . . . . . . .
4.45 Espaço de variáveis resultante das 10 execuções do NSGA-II para
objetivo 4 com cenário 5. . . . . . . . . . . . . . . . . . . . . . . . .
4.46 Dominância resultante das 10 execuções do NSGA para o objetivo 4
com o cenário 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.47 Fronteira Pareto-ótima resultante das 10 execuções do NSGA-II para
objetivo 4 com o cenário 6. . . . . . . . . . . . . . . . . . . . . . . .
x
. 72
. 72
. 74
. 74
.
.
.
.
75
76
76
77
.
.
.
.
78
78
79
79
. 81
. 82
. 82
. 83
. 83
. 84
. 85
. 85
. 86
4.48 Espaço de variáveis resultante das 10 execuções do NSGA-II para
objetivo 4 com cenário 6. . . . . . . . . . . . . . . . . . . . . . . . .
4.49 Dominância resultante das 10 execuções do NSGA-II para o objetivo
4 com o cenário 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.50 Destaque de três ponto no espaço de variáveis resultante das 10 execuções do NSGA-II para objetivo 4 com cenário 5. . . . . . . . . . .
4.51 Evolução populacional do Aedes aegypti na fase aquática ao longo dos
120 dias para os pontos A, B e C. . . . . . . . . . . . . . . . . . . .
4.52 Evolução populacional das fêmeas imaturas e fertilizadas ao longo dos
120 dias para os pontos A, B e C. A evolução das fêmeas imaturas é
bem próxima para os três pontos, resultando assim, em apenas uma
curva após a simulação. . . . . . . . . . . . . . . . . . . . . . . . . .
4.53 Evolução populacional de machos naturais e estéreis ao longo dos
120 dias para os pontos A, B e C. A evolução dos machos naturais
é semelhante para os três pontos, resultando assim, em apenas uma
curva após a simulação. . . . . . . . . . . . . . . . . . . . . . . . . .
xi
. 87
. 87
. 88
. 89
. 89
. 90
Lista de Tabelas
3.1
3.2
3.3
Parâmetros adotados no modelo 4.1. . . . . . . . . . . . . . . . . . . 46
Condições iniciais do sistema. . . . . . . . . . . . . . . . . . . . . . . 46
Coeficientes adotados no índice de desempenho do cenário 1. . . . . . 46
4.1
4.2
4.3
Parâmetros adotados no AG. . . . . . . . . . . . . . . . . . . . . . .
Coeficientes adotados na função custo do cenário 1. . . . . . . . . .
Valores ótimos obtidos para as variáveis de decisão u1 e u2 , bem como
os valores da função objetivo J para as constantes do cenário 1. . .
Parcelas do índice de desempenho - cenário 1 . . . . . . . . . . . . .
Média e desvio padrão do índice de desempenho J(u) a partir das
variações do tamanho da população e do número de gerações considerando as constantes do cenário 1. . . . . . . . . . . . . . . . . . .
Coeficientes adotados na função custo do cenário 2. . . . . . . . . .
Valores ótimos obtidos para as variáveis de decisão u1 e u2 , bem como
os valores da função objetivo J para as constantes do cenário 2. . .
Parcelas do índice de desempenho - cenário 2 . . . . . . . . . . . . .
Coeficientes adotados na função custo do cenário 3. . . . . . . . . .
Valores ótimos obtidos para as variáveis de decisão u1 e u2 , bem como
os valores da função objetivo J para as constantes do cenário 3. . .
Parcelas do índice de desempenho - cenário 3 . . . . . . . . . . . . .
Coeficientes adotados na função custo do cenário 4. . . . . . . . . .
Valores ótimos obtidos para as variáveis de decisão u1 e u2 , bem como
os valores da função objetivo J para as constantes do cenário 4. . .
Parcelas do índice de desempenho - cenário 4 . . . . . . . . . . . . .
Menores valores ótimos das 30 execuções realizadas pelo AG. . . . .
Coeficientes adotados na função custo do cenário 5. . . . . . . . . .
Parcelas do índice de desempenho - cenário 5 . . . . . . . . . . . . .
Coeficientes adotados na função custo do cenário 6. . . . . . . . . .
Parcelas do índice de desempenho - cenário 6 . . . . . . . . . . . . .
4.4
4.5
4.6
4.7
4.8
4.9
4.10
4.11
4.12
4.13
4.14
4.15
4.16
4.17
4.18
4.19
xii
. 51
. 54
. 54
. 58
. 58
. 60
. 60
. 62
. 63
. 63
. 67
. 67
.
.
.
.
.
.
.
67
69
71
75
77
78
80
4.20 Valores obtidos com o NSGA-II para o cenário 5 com três pontos
escolhidos dentre as soluções do conjunto Pareto-ótimo. . . . . . . . . 88
xiii
Capítulo 1
Introdução
A dengue é uma infecção viral transmitida ao homem por um vetor artrópodo, do
gênero Flavivirus (Guzman et al., 2010). Sendo o principal vetor, o mosquito Aedes
aegypti. O vírus possui quatro sorotipos distintos, sendo que um sorotipo não fornece
imunidade ao outro.
Atualmente, é considerada uma doença emergente e reemergente em alguns países. Um grave problema de saúde pública mundial, principalmente nas regiões tropicais e subtropicais onde é alto o risco de transmissão de dengue (Guzmán e Kouri,
2002). A Figura 1.1 apresenta um mapa destacando os casos de dengue no mundo
em 2008. .
Figura 1.1: Situação da dengue no mundo em 2008. Em vermelho temos, as áreas de risco
de dengue no ano de 2008, segundo a Organização Mundial de Saúde. Fonte: WHO, 2009,
p. 3.
1
1.0
2
A estimativa é que, mundialmente, 50 milhões de pessoas são infectadas todos os
anos. Somente no Brasil, entre janeiro e junho de 2010, foram notificados 361.552
casos de dengue (WHO, 2009 apud Oliveira et al., 2011).
Percebendo-se a gravidade da doença, muitos estudos têm sido voltados para o
controle da dengue, visto que vacinas e medicamentos eficazes para prevenir e tratar
a doença, ainda estão em fase de pesquisa e desenvolvimento. Perante esses fatos,
o controle é focado no vetor transmissor da doença. Somente as fêmeas adultas do
mosquito se alimentam de sangue, ou seja, são hematófagas e, portanto, é a partir
da picada delas que há a transmissão da dengue para o ser humano.
Diversos mecanismos de controle - mecânicos, químicos, biológicos - do mosquito,
têm sido desenvolvidos e empregados, na maioria dos casos de forma conjunta, pois
cada método de controle apresenta vantagens e desvantagens. Segundo Oliveira
et al. (2011), o manejo integrado é a estratégia de combate ao vetor que apresenta
melhores resultados, pois compreende o uso de múltiplas atividades com diferentes
focos para impedir a proliferação do vetor nas áreas afetadas. No entanto, todas as
técnicas de combate apresentam um custo para sua implementação e, muitas vezes,
alguns países não possuem recursos para tal.
Além do custo, outro fator que também pode ser considerado para as formas de
se controlar a dengue, é a sazonalidade, já que a dengue ocorre com maior incidência
no período de verão.
Esteva e Yang (2005) propuseram um modelo matemático que avalia o efeito da
inserção de mosquitos machos estéreis no meio ambiente. Visando otimizar os custos
e analisar uma combinação eficaz das técnicas de controle, Thomé (2007) propõe um
modelo de otimização, fundamentado na Teoria de Controle Ótimo, que descreve a
dinâmica do controle biológico e introduz duas variáveis de controle relacionadas ao
investimento com inseticidas e à produção e liberação de machos inférteis. O autor
propõe um funcional de custo, que busca minimizar tanto o custo com produtos químicos quanto com a introdução dos machos estéreis e, consequentemente, minimizar
o número de mosquitos fêmeas fertilizadas. Este problema é resolvido analítica e
numericamente.
A otimização trata do conjunto de métodos capazes de determinar as melhores configurações possíveis para a construção ou o funcionamento de sistemas de
interesse para o ser humano. Os métodos de otimização utilizam a abordagem
mono-objetivo ou escalar, significando que a figura de mérito que o mecanismo de
otimização deve minimizar é uma função cuja imagem é um número real. Sabe-se
que muitas vezes é necessário atender a várias funções distintas, não necessariamente
comparáveis entre si. Desta forma, temos um problema com diversas funções a ser
otimizadas simultaneamente. Cada método de otimização se baseia em diversas
1.1
3
premissas referentes ao funcional a ser otimizado, como: linearidade, convexidade,
diferenciabilidade, etc.
Os métodos estocásticos de otimização têm atingido a melhor aproximação para
o problema de otimização de funções arbitrárias. Dentro de tal classe, a família dos
Algoritmos Genéticos tem sido aplicada a diferentes problemas.
Devido às propriedades de otimização global dos Algoritmos Genéticos, eles se
tornaram uma ferramenta natural para abordar problemas em que se desconhece a
estrutura da função (ou funções) a ser otimizada. Outra razão potencial para esta
adequabilidade é apontada aqui: uma vez que os algoritmos genéticos trabalham
com populações de soluções candidatas, ao invés de trabalhar com uma única solução candidata (como seria o caso de alguns algoritmos usuais de otimização), eles
são capazes de incorporar operadores que exploram as “propriedades do grupo” do
conjunto Pareto-ótimo, gerando em uma única execução um conjunto de estimativas
para esse conjunto (Takahashi, 2007c).
Nesse âmbito, este trabalho baseia-se nos artigos (Barsante et al., 2011b) e (Barsante et al., 2011a). Ele utiliza Algoritmos Genéticos, para resolver o problema
proposto por Thomé (2007) trabalhando com o mesmo índice de desempenho proposto pelo autor e sugerindo outros funcionais mono e multiobjetivos. Além disso,
visa minimizar os custos com inseticidas, produção de machos estéreis e a população
de fêmeas fertilizadas.
1.1
1.1.1
Objetivos
Objetivo geral
Este trabalho visa otimizar o controle integrado do mosquito da dengue, utilizando
o modelo proposto por Thomé (2007), no que se refere ao menor custo possível e
à minimização de fêmeas fertilizadas, utilizando otimização mono e multiobjetivo,
por meio de Algoritmos Genéticos.
1.1.2
Objetivos específicos
• Realizar um apanhado literário sobre a dengue, em especial aos mecanismos
de controle utilizados.
• Estudar o modelo matemático proposto por Thomé (2007), encontrando seus
pontos de equilíbrio, estabilidade e resolver pelo método Runge-Kutta.
• Revisar conceitos sobre otimização escalar e vetorial.
1.2
4
• Resolver o problema de minimização escalar proposto por Thomé (2007), por
meio de Algoritmo Genético.
• Propor novos índices de desempenho para estudar os custos com utilização de
inseticidas e com liberação de machos estéreis.
• Resolver alternativamente o problema, considerando o mesmo como um problema de otimização multiobjetivo, através do algoritmo NSGA-II.
1.2
Justificativa
Em diversas partes do mundo a dengue é uma doença abordada tanto a nível de
saúde pública quanto ao nível social. Direcionando ao Brasil, podemos observar que
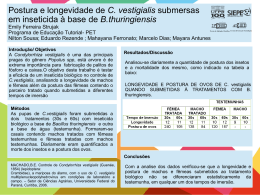
o número de casos notificados da doença tem aumentado nos últimos anos, conforme
aponta o gráfico da Figura 1.2.
Taxa de incidência de dengue. Brasil e Grandes Regiões, 1990-2010
900,0
800,0
700,0
600,0
500,0
400,0
300,0
200,0
100,0
0,0
1990
1991
1992
1993
Região Norte
1994
1995
1996
1997
Região Nordeste
1998
1999
2000
Região Sudeste
2001
2002
Região Sul
2003
2004
2005
2006
Região Centro-Oeste
2007
2008
2009
Brasil
Figura 1.2: Incidência anual de dengue no Brasil, por região. FONTE: SVS, 2011.
Barreto e Teixeira (2008) apontam a necessidade em investir em pesquisas: A
dengue tem se tornado cada vez mais séria e importante no Brasil e, em diversos
países tropicais. Estes, têm encontrado dificuldades para controlar a doença. Dessa
forma, deve-se desenvolver novas tecnologias voltadas para a o controle do Aedes
1.2
5
aegypti, proporcionando a diminuição da população desse vetor a níveis incompatíveis com a transmissão viral.
Devido ao alto custo na manutenção de estruturas de combate ao vetor Aedes
aegypti ; pelo sucesso adquirido na produção de vacinas, como o da febre amarela,
com excelente capacidade imunizante (SUCEN, 2011); existem diversas pesquisas a
fim de desenvolver uma vacina eficaz contra o vírus da dengue.
Enquanto não há uma vacina para o vírus da dengue, a única forma de prevenção existente consiste no controle do mosquito transmissor, metodologia que vem
sendo adotado a mais de um século. Primeiro se tem as campanhas bem sucedidas
dos higienistas Emilio Ribas e Osvaldo Cruz no início do século XX e depois pela
implantação de plano de erradicação no continente Americano que culminou com a
eliminação do vetor do território brasileiro em 1958 (SUCEN, 2011).
Logo, se torna imprescindível a elaboração de formas de prevenção, controle
do vetor ou mesmo, medidas de erradicação da doença. Mesmo com os diferentes
métodos que têm sido aplicados, infelizmente, ainda é crescente os casos de dengue
no mundo.
Um método recentemente estudado é a liberação de machos inférteis no ambiente
natural, para que copulem com as fêmeas e produzam ovos inviáveis. De acordo com
Yang e Thomé (2007), a técnica de liberação de insetos machos estéreis (SIT) foi
utilizada com sucesso na Flórida, EUA, para controlar mosca varejeira (Cochliomya
omnivorax ) em 1958. Foram liberados em um período de 18 meses um total de 2
bilhões de moscas, tendo um custo em torno de U$10.000.000,00.
Junto a essa técnica pode-se usar os inseticidas, que é preconizado com um dos
cinco componentes dos métodos de controle vetorial, em Brasil (2009), documento
elaborado pelas três esferas de gestão do SUS - Sistema Único de Saúde, para evitar
a transmissão da dengue.
Na Nota Técnica emitida pelo Ministério de Saúde (Brasil, 2010b), são indicadas
duas situações para aplicação de inseticida: em situação onde exista iminente risco
de grave epidemia, apontada por indicadores entomo-epidemiológicos específicos,
ou como ferramenta principal de interrupção de epidemias. Em qualquer uma das
situações, é fundamental tomar outras medidas em conjunto, principalmente aquelas
destinadas ao controle do mosquito na fase aquática, já que os inseticidas não atuam
sobre o vetor na fase larval e de pupa.
Em trabalho realizado como programa de controle da dengue em Cingapura,
foi possível avaliar o impacto da utilização das diversas medidas utilizadas para
enfrentamento de uma epidemia de dengue naquele país. Foi demonstrado que
o uso concomitante das ações de controle larvário e adulticidas podem impactar
consideravelmente o curso de uma epidemia (Brasil, 2010b).
1.3
6
Observa-se então a importância de combinar o uso da técnica de inserção de machos estéreis e a aplicação de inseticidas, levando em consideração o custo-benefício
de ambos. Visto que a primeira técnica é aparentemente mais cara, no entanto, a
segunda é um método recorrente, que deve ser usado periodicamente.
É notório que se deve fazer um controle integrado, ou seja, reunir técnicas de controle que sejam eficientes na redução da população do Aedes aegypti. Tais métodos
de controle devem apresentar o menor custo possível, pois onde há maior incidência
da dengue é em países em desenvolvimento.
1.3
Organização do trabalho
O trabalho está organizado em capítulos. Este primeiro capítulo é a introdução e o
último é a conclusão.
No segundo capítulo faremos a revisão bibliográfica, onde falaremos sobre a dengue, destacando os mecanismos de controle, depois apresentaremos um breve estudo
sobre otimização não-linear escalar e vetorial. Por último, explicaremos os Algoritmos Genéticos que foram usados para as simulações neste trabalho.
No capítulo 3 descreveremos o modelo matemático utilizado na definição da
dinâmica populacional da dengue e o índice de desempenho estudado neste trabalho.
No capítulo 4 serão descritos os resultados dos testes para os diferentes estudos
de casos.
Capítulo 2
Revisão Bibliográfica
A revisão bibliográfica apresentada neste capítulo é dividida em três partes: a primeira relata sobre a dengue, destacando alguns fatos históricos, formas de transmissão da doença e meios de controlá-la. A segunda, descreve otimização escalar e
vetorial. E a terceira, apresenta os Algoritmos Evolucionários utilizados nas simulações - Algoritmo Genético e o NSGA-II.
2.1
Dengue
Os mosquitos do gênero Aedes são os transmissores do vírus causador da dengue,
sendo que, o transmissor principal é o Aedes Aegypti, este, é um mosquito domiciliado e urbano (Thomé, 2007).
O Aedes aegypti, está presente em todos os continentes e é admitida sua introdução na Região Neotropical pelo tráfico entre a África e as Américas, ao longo dos
séculos XV até o XIX (SUCEN, 2011). Este vetor pode transmitir qualquer um dos
quatros sorotipos do vírus da dengue e também o vírus da febre amarela. A dengue é uma doença que afeta tanto crianças quanto adultos, no entanto, não possui
tratamento específico, logo, o vetor da doença é o principal alvo para controle da
doença.
A Figura 2.1 mostra um exemplo de um mosquito vetor da dengue.
Este mosquito está adaptado a se reproduzir nos ambientes doméstico e peridoméstico, utilizando-se de recipientes que armazenam água potável e recipientes
descartáveis que acumulam água de chuvas, comumente encontrados nos lixos das
cidades (Câmara et al., 2007). Sendo assim, o Aedes aegypti pode ser encontrado em
áreas urbanas pobres, subúrbios, zona rural e bairros mais ricos, de países tropicais
e subtropicais.
O Aedes albopictus é mais um mosquito que tem apresentado forte potencial
7
2.1
Revisão Bibliográfica
8
Figura 2.1: Exemplo de um mosquito Aedes aegypti. FONTE: (Brasil, 2010a)
de transmissão do vírus dessa doença. Barreto e Teixeira (2008) afirmam que nos
últimos anos, em consequência do intenso comércio intercontinental de pneus, por
intermédio dos transportes marítimos, o Aedes albopictus se disseminou para as
Américas, sendo inicialmente detectado nos Estados Unidos, em 1985. No Brasil,
foi detectado em 1986, e já é identificado em mais de mil municípios. O Aedes
albopictus deposita seus ovos em ocos de árvores e não é doméstico. Este mosquito
é, nos dias de hoje, um vetor de importância secundária na Ásia, mais associado à
transmissão da dengue em meio rural ou semi-urbano. (Braga e Valle, 2007).
As duas formas principais da doença se manifestar clinicamente são: dengue clássica, ou febre de dengue e, a forma hemorrágica, ou febre hemorrágica de dengue.
Em diferentes textos, febre de dengue é abreviada como FD ou DF e, febre hemorrágica de dengue como FHD ou DHF. Em qualquer uma das formas, os sintomas mais
comuns são febre, enjôo, vômitos, dor nos olhos, cansaço, falta de apetite, dores no
corpo, principalmente nos músculos e nas articulações, e dores de cabeça.
Cayres (2006) diz que como a dengue é uma doença sazonal, todo verão haverá
um aumento sem, necessariamente, caracterizar uma epidemia. Pois, como ainda
explica o autor, epidemia representa um aumento brusco, acima do esperado, e
temporário, do número de casos de uma determinada doença. Portanto, não se
pode dizer que a dengue sempre será uma epidemia.
A dengue foi reconhecida em mais de 100 países, e 2,5 bilhões de pessoas vivem
em áreas onde a dengue é endêmica, ou seja, são registrados focos da doença num
determinado local, sem se espalhar por toda uma região. Estima-se que ocorram,
anualmente, de 50 a 100 milhões de casos de DF e várias centenas de milhares de
DHF, dependendo da atividade epidêmica. Existe notificação oficial de cerca de de
250 000 a 500 000 casos de DHF; a verdadeira incidência, entretanto, não é muito
bem conhecida (Guzmán e Kouri, 2002).
Existem 4 sorotipos distintos de dengue (sorotipos 1, 2, 3 e 4), também denominados DEN-1, DEN-2, DEN-3 e DEN-4. De acordo com Thomé (2007) esses quatro
sorotipos do vírus pertencem a família Flavivírus e estão relacionados, porém são
2.1
Revisão Bibliográfica
9
antigenicamente distintos. A infecção por qualquer um dos quatro sorotipos pode
provocar diversas reações no ser humano, desde infecções assintomáticas até a forma
hemorrágica da doença. Após a infecção por um destes sorotipos, o indivíduo desenvolve imunidade somente a esse sorotipo. Assim, pessoas que vivem em áreas
endêmicas de dengue podem ter mais de uma infecção de dengue durante sua vida.
É admitido que todos os 4 sorotipos de dengue podem provocar quadros hemorrágicos. Porém, estudos clínicos e virológicos evidenciaram uma maior correlação
entre os casos de dengue hemorrágica e o DEN-2, quando este ocorria como “infecção
secundária”. Entretanto, há relatos de epidemias de dengue hemorrágica causadas
pelo DEN-3, indicando que ou existem cepas virulentas que causam epidemia de
dengue hemorrágica ou uma “infecção secundária” pode provocar uma resposta mais
intensa, com sintomas de dengue hemorrágica (Yang, 2003).
2.1.1
Aspectos históricos
Os relatos de epidemia de dengue ocorreram em 1779-1780 na Ásia, África e América
do Norte (Thomé, 2007).
Teixeira et al. (1999) explica que relatos clínicos e epidemiológicos potencialmente compatíveis com dengue são encontrados em uma enciclopédia chinesa datada de 610 DC, não havendo precisão quanto ao ano exato desta ocorrência. Em
1635, no oeste da Índia Francesa e, em 1699, no Panamá, são apresentados surtos de
uma doença febril aguda, no entanto, não há consenso quanto a terem sido febre do
dengue ou outra doença. Os eventos de melhor documentação na literatura, neste
período anterior à identificação dos agentes, são as da ilha de Java, em Jacarta, e
as do Egito, ambas em 1779, além da de Filadélfia, nos Estados Unidos, no ano
seguinte.
O Aedes Aegypti é originado da África subsahariana, onde se domesticou e se
adaptou ao ambiente criado pelo homem, tornando-se antropofílico1 , sendo suas
larvas encontradas em depósitos artificiais (Teixeira et al., 1999).
Da África, o Aedes aegypti se dispersa para todo o hemisfério ocidental no século
XVII, para o Mediterrâneo no século XVIII, para a Ásia tropical no século XIX e
para as Ilhas do Pacífico no final do século XIX e início do século XX (Rodhain
e Rosen, 1997 apud Teixeira et al., 1999). Os autores, também afirmam que o
Aedes Aegypti foi erradicado do Mediterrâneo, na década de 50, e de grande parte
das Américas, nos anos 50 e 60. No entanto, houve reinfestação na maioria das
áreas de onde havia sido erradicado e, hoje, este vetor é considerado uma espécie
“cosmotropical”.
1
Antropofílico é a aptidão que alguns insetos apresentam para identificar ação humana.
2.1
Revisão Bibliográfica
10
A dengue ocorreu nas Américas no século XIX, até as primeiras décadas do
século XX, quando se observou um silêncio epidemiológico. Em 1963, foi detectada a
reemergência do DEN-1 e do DEN-2, associados à ocorrência de epidemias de dengue
clássica. Nessa década, apenas quatro países notificaram casos, número esse que se
eleva para nove países em 1979. Todavia, a grande escalada da dengue no continente
americano se deu a partir dos anos 1980, período no qual 25 países registraram
circulação do vírus, e, com tendência rapidamente crescente, em 2002, observa-se
a maior pandemia continental que atingiu 69 nações americanas, registrando-se no
total mais de um milhão de casos de FD. Atualmente, a circulação do vírus da
dengue já se estabeleceu desde o sul dos Estados Unidos até a Argentina, embora
seja mais intensa entre os paralelos 35o N e 35o S (WHO, 2008 apud Barreto e
Teixeira, 2008).
No Brasil, existe referência da dengue desde 1846 (Braga e Valle, 2007). Em
1916 há relato de dengue na cidade de São Paulo e, no ano de 1923, em Niterói
(RJ), porém, não confirmado (Teixeira et al., 1999). No entanto, o primeiro surto
epidêmico documentado ocorreu em Boa Vista, no Estado de Roraima, em 1982
(Barreto e Teixeira, 2008). Em 1955 foi a primeira vez que o Aedes aegypti foi
erradicado no Brasil e, entre 1967 e 1969 foi reintroduzido (Braga e Valle, 2007).
Novamente eliminado em 1973, reaparecendo na Bahia em 1976 e no Rio de Janeiro
em 1977 (Yang et al., 2003).
No período entre 1986 e 1990, as epidemias de dengue se restringiram a alguns
estados das regiões sudeste (Rio de Janeiro, São Paulo e Minas Gerais) e nordeste
(Pernambuco, Alagoas, Ceará e Bahia)(Braga e Valle, 2007).
Logo após esse período surgem os primeiros registros de dengue hemorrágico,
conforme explica Teixeira et al. (1999): Em 1990, ocorre um agravamento de grandes
proporções, consequente ao aumento da circulação do DEN-1 e da introdução do
DEN-2 no Rio de Janeiro, onde a incidência atinge 165,7 por 100 mil habitantes,
naquele ano, e, em 1991, 613,8 casos por 100 mil habitantes. É neste período que
surgem os primeiros registros de dengue hemorrágico, com 1.316 notificações, 462
confirmações diagnósticas e oito óbitos.
Em relação aos agentes etiológicos da dengue, Teixeira et al. (1999) afirma que
o isolamento dos vírus só ocorreu na década de quarenta, por Kimura, em 1943, e
Hotta, em 1944, tendo-se denominado Mochizuki a esta cepa. Sabin e Schlesinger,
em 1945, isolaram a cepa Havaí, quando o primeiro, neste mesmo ano, ao identificar
outro vírus em Nova Guiné, observou que as cepas tinham características antigênicas
diferentes e passou a considerar que eram sorotipos do mesmo vírus. Às primeiras
cepas ele denominou sorotipo 1 e à da Nova Guiné sorotipo 2. Em 1956, no curso da
epidemia de dengue hemorrágico no Sudeste Asiático, foram isolados os vírus 3 e 4,
2.1
Revisão Bibliográfica
11
definindo-se, a partir daí, que o complexo dengue é formado por quatro sorotipos:
DEN-1, DEN-2, DEN-3 e DEN-4.
No Brasil, o DEN-1 e o DEN-4 foram isolados em Boa Vista (RO) em 1982.
Em 1986 o DEN-1 foi reintroduzido, tendo sido isolado em Nova Iguaçu (RJ). Segundo Barreto e Teixeira (2008), no biênio 1986/1987 somente circulou o DEN-1,
as epidemias foram de FD, e na sequência observa-se um período de dois anos que
se caracteriza pela baixa endemicidade da doença. Um recrudescimento da doença,
de proporções consideradas sérias na época, teve início em 1990, provocado pelo aumento da transmissão do DEN-1 e introdução do DEN-2, também em Nova Iguaçu.
Em 2001, o sorotipo DEN-3 circulava no Rio de Janeiro, tendo sido detectado
também no Estado de Roraima - neste último, provavelmente em função do intenso
trânsito de pessoas na fronteira entre Brasil e Venezuela. Atualmente, o DEN-3
circula em 25 das 27 unidades federadas (Braga e Valle, 2007).
O sorotipo 4 não era registrado no Brasil há 28 anos, mas foi encontrado e isolado
em laboratório em julho de 2010 em Roraima. O temor das autoridades sanitárias
é de que uma epidemia se alastre pelo país rapidamente, uma vez que a população
não está imune ao sorotipo 4. 2
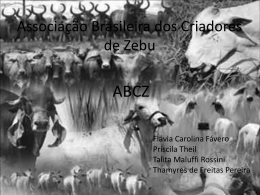
A Figura 2.2 mostra a distribuição dos sorotipos que circulam no Brasil em 2006.
Figura 2.2: Sorotipos circulantes no Brasil em 2006. Fonte: Brasil, 2006.
2
Disponível em: http://sissaude.com.br/sis/inicial.php?case=2&idnot=9911. Acesso
em: Novembro de 2011.
2.1
Revisão Bibliográfica
2.1.2
12
Transmissão da doença
O ciclo de vida do vetor Aedes Aegypti é composto por quatro fases:
Fase oval: A partir do número de criadouros disponíveis e do aumento da taxa
de oviposição das fêmeas adultas, cresce o número de ovos. Quando há a
transição desses para a fase larval e, como alguns ovos se tornam inviáveis, há
um decréscimo do número de ovos.
Fase larval: A população de larvas aumenta com a eclosão dos ovos e diminui com
a transformação destas em pupas e, também com a morte de uma determinada
taxa de larvas.
Fase pupa: As larvas se transformam em pupas, o que aumenta essa população, no
entanto, depois dessa fase, elas mudam para a fase adulta e algumas morrem
o que, diminui a quantidade de pupas.
Fase adulta ou alada: Com a transição de pupas para mosquitos adultos, têm-se
um aumento da fase adulta, que diminui com a morte desses mosquitos.
Somente as fêmeas adultas do Aedes Aegypti se alimentam de sangue, ou seja,
são hematófagas, portanto, é a partir da picada delas que há a transmissão da
doença.
Yang (2003) explica como se dá a infecção da fêmea pelo vírus: a fêmea do
mosquito, suscetível, infecta-se com o vírus da dengue quando se alimenta de um
indivíduo infectante (no período de viremia). Após o período de incubação extrínseca, que vai desde a ingestão do sangue infectado até o momento em que é capaz de
transmitir o vírus pela sua replicação nas glândulas salivares, o mosquito permanece
infectante até a sua morte, sem nada sofrer ou apresentar lesões mínimas. Este
período pode variar de 7 a 10 dias.
O mosquito fêmea infectado pode transferir o vírus para sua prole através da
transmissão transovariana.
A fêmea acasala uma única vez em sua vida e após o acasalamento ela evita
outros machos. Além disso, a fêmea do mosquito não deposita seus ovos de uma só
vez. Ela libera aos poucos e em lugares diferentes aumentando a probabilidade de
nascimento de novos mosquitos (Thomé, 2007).
Quando um mosquito infectante injeta vírus da dengue no hospedeiro suscetível
durante o repasto sanguíneo, após um período de incubação que varia, em média,
de 4 a 6 dias (mínimo de 3 e máximo de 10 dias), a dengue pode evoluir para
forma assintomática, forma clássica com febre, mialgias (dores muscular) e artralgias
(dores articulares), e para forma grave, conhecida como “dengue hemorrágica”, que
2.1
Revisão Bibliográfica
13
cursa com distúrbios da coagulação e choque, podendo levar à morte. A duração
dos sintomas varia usualmente de 3 a 7 dias e o período infeccioso (viremia) dura
apenas alguns dias, variando de 3 a 7 dias. Posteriormente, o indivíduo desenvolve
imunidade específica de longa duração (Yang, 2003).
Segundo Teixeira et al. (1999), o Aedes Aegypti tem a capacidade de fazer ingestões múltiplas de sangue durante um único ciclo gonadotrófico3 , o que amplia a sua
possibilidade de infectar-se e de transmitir os vírus.
Não há transmissão do vírus da dengue por contato direto de um doente ou de
suas secreções para uma pessoa sadia, nem através da água ou alimento. Em 45 dias
de vida, um único mosquito pode contaminar até 300 pessoas (Wearing, 2006 apud
Thomé, 2007).
Os fatores que contribuem para à transmissão da doença são diversos, e estão
relacionados ao mosquito, à questões sociais e ambientais.
Em relação ao mosquito, Thomé (2007) cita: a capacidade vetorial do Aedes
aegypti em função das variações socioambientais como a especificidade da interação
mosquito-hospedeiro, a frequência de picadas e o período do dia em que ocorre maior
número de picadas, formas de acasalamento, número médio de ovos resultantes de
cada ciclo gonotrófico, vida média dos mosquitos e vida média em cada etapa do
ciclo vital.
As mudanças demográficas e o intenso fluxo migratório rural-urbano, que geraram um crescimento desordenado nas cidades, ausência de boas condições de saneamento básico e, como consequência, a proliferação do vetor (Braga e Valle, 2007).
Soma-se a essas conjunturas sociais os tipos de construção de moradia.
Donalísio e Glasser (2002) explica como funciona a domiciliação da população
de vetores. Em uma população em particular, depende do número e das combinações de feições comportamentais controladas geneticamente, tais como habilidade
de entrar nas edificações, oviposição e desenvolvimento das larvas em recipientes
artificiais no intradomicílio, utilização das casas como abrigo para repouso, acasalamento e repasto com sangue humano, também no intradomicílio. Por outro lado, o
comportamento da população humana exerce pressão seletiva sobre a população do
vetor no processo de domiciliação.
Contribuintes ambientais, não relacionados ao mosquito, como o “EL Niño” que provoca chuvas irregulares e, o aumento da poluição ambiental, ocasionando
aumento de temperatura ambiente, também colaboram para a proliferação da doença. Estudos apontam ocorrência da doença conforme às condições climáticas,
após os períodos de chuvas com temperaturas elevadas observa-se um aumento no
3
O ciclo gonadotrófico refere-se à sequência de eventos que a fêmea realiza desde a ingestão de
sangue até a oviposição.
2.1
Revisão Bibliográfica
14
número de casos de dengue e também da população de mosquitos.
2.1.3
Mecanismos de controle da dengue
A falta de uma vacina eficaz e segura, a força de morbidade do agente infeccioso e a
alta competência vetorial do Aedes aegypti, vetor bem adaptado ao ambiente urbano
densamente povoado, com deficiências e estilos de vida da população que geram
habitats ideais para este mosquito, tornam a prevenção da dengue uma formidável
tarefa quase impossível de ser atingida com os atuais meios disponíveis para sua
prevenção (Barreto e Teixeira, 2008).
Assim, o vetor é o alvo para o combate da doença. Várias formas de controle
têm sido estudadas e desenvolvidas visando eliminar o mosquito em suas diferentes
fases.
Controle físico ou mecânico: Consiste na retirada dos criadouros, eliminando
as três fases aquáticas (ovo, larva e pupa). Esse controle é realizado pela
população, incluindo agentes de saúde pública e os próprios moradores.
Controle químico larvicida: Refere-se ao tratamento interno dos locais onde se
encontram as larvas, por meio de produtos químicos de longa duração. Até
mesmo as pupas podem morrer com esse método.
Controle químico adulticida: Os mosquitos adultos podem serem mortos com
a borrificação de inseticidas nas residências ou por meio de pulverização nas
ruas.
Um problema apontado ao uso de inseticidas é o desenvolvimento de resistência
dos vetores da dengue. De acordo com Donalísio e Glasser (2002), os fatores
envolvidos no processo de resistência podem ser agrupados em genéticos (genes
que conferem resistência), biológicos (duração do ciclo biológico e dispersão) e
operacionais (intensidade da exposição da população no tempo e espaço e nas
várias fases do ciclo biológico).
Controle biológico: Baseia-se na introdução de inimigos naturais para eliminar
ou diminuir a população de mosquitos.
Por exemplo, o Bacillus thuringhiensis H-14(BTI) e os peixes larvicidas das
espécies Gambusia afinis e Poecilia spp, têm sido os mais utilizados e preconizase o seu uso mais amplo nos programas de combate. Ensaios com larvas de
outros mosquitos (Toxorhynchites) e algumas pulgas d’água (Mesoscyclops;
Macrocyclops), também vêm sendo experimentados (Teixeira et al., 1999).
2.1
Revisão Bibliográfica
15
A vantagem desse tipo de controle é conferida pela grande seletividade de ação,
não afetando organismos não-alvo, menor impacto no ambiente comparado ao
controle químico e ausência de resistência aos inimigos naturais. Por outro lado
essa metodologia apresenta desvantagens importantes, pois em se tratando de
mecanismo natural de regulação de população, o vetor pode ser suprimido mas
não eliminado, exige tecnologia para a produção em massa, exige estudo do
ecossistema. E apresenta um alto custo monetário (SUCEN, 2011).
Controle genético: Vários métodos genéticos de controle de culicídeos 4 vêm sendo
estudados em laboratório. A utilização de machos estéreis, visando reduzir a
fertilidade da população local, foi objeto de testes em campo. Outro método
é a produção de cepas não suscetíveis a agentes de doenças, visando substituir
as populações locais por essas cepas refratárias (Donalísio e Glasser, 2002).
Inserção de mosquitos machos estéreis Uma estratégia de controle da dengue
é a implantação de insetos inférteis no meio ambiente, resultando, após o
acasalamento, em ovos inviáveis, em consequência, pode-se haver a extinção
ou diminuição dos mosquitos.
Esta técnica é conhecida como como Sterile Insect Technique (SIT) e foi proposta por Knipling em 1955.
A SIT se baseia na criação em massa, esterilização por radiação
e liberação de grandes números de insetos machos estéreis em uma
área alvo. Os machos liberados cruzarão com fêmeas selvagens, reduzindo o potencial reprodutivo da população selvagem e, portanto
causando a redução da população nas gerações subsequentes. Se um
número suficiente de machos estéreis forem liberados por tempo suficiente, a população alvo entrará em colapso, levando-a sua supressão
ou até mesmo sua eliminação total da área alvo, sendo assim esta
técnica é espécie específica e não agride o meio ambiente (Marrelli,
2008).
Este método é muito utilizado em controle de pragas agrícolas e, se mostra
mais eficiente em relação ao uso de inseticida por não prejudicar outras espécies
que vivem no mesmo habitat do mosquito.
Thomé (2007) ressalta que os mosquitos machos não picam, portanto podem
ser liberados para copular com a população de fêmeas, sem representar qualquer risco para os seres humanos.
4
Os culicídeos são insetos da família Culicidae, também conhecidos como mosquitos, pernilongos, muriçocas ou carapanã. As fases imaturas são aquáticas. Quando adultos, são insetos alados,
isto é, possuem asas. E possuem também pernas e antenas longas. A maioria dos culicídeos são
hematófagos.
2.1
Revisão Bibliográfica
16
O paradigma deste novo método foi a eliminação bem sucedida do Cochliomyia
hominivorax (agente de miíases) do sul dos EUA, México e América Central.
Esta área está atualmente protegida de uma re-invasão pela América do Sul por
meio de barreira no Panamá de relativamente poucas moscas estéreis. Moscas
estéreis também foram utilizadas para eliminar a potencialmente devastadora
entrada desta espécie no norte da África (Wilke et al., 2009).
A vantagem dessa técnica é que ela se aproveita do comportamento do macho
em procurar fêmeas para copular, não utiliza nenhum tipo de inseticida, é
espécie-especifica e ambientalmente segura (Oliveira et al., 2011).
Assim como outros mecanismos de controle, a SIT apresenta algumas desvantagens. Marrelli (2008) aponta que uma das dificuldades de se utilizar a SIT
é que os mosquitos irradiados terão que competir com os mosquitos naturais
para acasalar, no entanto, ao sofrerem a radiação os insetos machos se tornam
menos competitivos e apresentam menor tempo de vida do que os os machos
naturais. Outra inconveniência na utilização desse método, é a separação dos
mosquitos fêmeas dos lotes de machos estéreis.
Além disso, há a dificuldade de separar os insetos machos para liberação. De
acordo com Wilke et al. (2009), as instalações de irradiação são caras e potencialmente perigosas. Há possibilidade de liberação de indivíduos irradiados,
porém ainda férteis, o que pode ser potencialmente perigoso. A logística é
prejudicada pela necessidade de soltura em estágios de vida pré-estabelecidos
e pela distância das instalações das áreas-alvo.
Segundo Yang e Esteva (2005), fatores que devem ser considerados na liberação
de insetos estéreis são: competitividade dos insetos estéreis na fertilização,
liberação em número insuficiente, forma de liberação inadequada, etc.
No Brasil, está sendo testada a inserção de mosquitos geneticamente modificados. Nesse processo mosquitos machos, produzidos em laboratório, recebem
um gene modificado. Ao cruzarem com as fêmeas eles passam o gene para
seus filhos. Este gene produz uma proteína fatal para o inseto. O método é
desenvolvido pela Bioindústria Moscamed, o Instituto de Ciências Biomédicas
da Universidade de São Paulo (ICB/USP), a Faculdade de Higiene e Saúde
Pública (FSP/USP) e a Oxitec (Universidade de Oxford/U.K)(Rattes, 2011).
A bióloga Margareth Capurro é a incentivadora do estudo desse mecanismo
no Brasil.
Esse método funciona, conforme explica Silveira (2011), da seguinte maneira:
Os machos da linhagem OX513A, como foi denominada pela em-
2.1
Revisão Bibliográfica
17
presa, são liberados para copular com fêmeas selvagens. Os descendentes desses acasalamentos herdam a proteína letal, morrendo
ainda na fase de larva ou pupa. Para que sua produção seja possível em laboratório, eles foram programados para sobreviver quando
recebem o antibiótico tetraciclina. Sem esse antídoto, que reprime
a síntese da proteína letal, não haveria sobreviventes para serem
soltos na natureza. A cepa transgênica contém um marcador genético fluorescente que se torna visível nas larvas quando elas recebem
luz ultravioleta. Isso garante um controle maior de qualidade na
produção e na dispersão no campo.
Com o aval da Comissão Técnica Nacional de Biossegurança (CTNBio) os
primeiros mosquitos transgênicos foram liberados, no início do ano de 2011,
em dois bairros em Juazeiro, no estado da Bahia. De acordo com COSEMSBA (2012) com esta experiência, houve redução de 90% da população dos
mosquitos em seis meses. Dessa forma, foi construída uma fábrica de mosquito
Aedes Aegypti geneticamente modificado, em Juazeiro. A mesma está sob
supervisão do Ministério de Saúde. A capacidade máxima desta fábrica é de
4 milhões de machos estéreis. Para este projeto o governo de estado da Bahia
tem investido cerca de 1,7 milhões de reais.
A primeira experiência com os mosquitos produzidos nesta unidade será em
Jacobina, também na Bahia. A partir dos resultados, o governo poderá expandir a estratégia para todo o país e, dentro de alguns anos, incorporá-la ao
Sistema Único de Saúde (SUS) como um dos mecanismos de combate à doença. Os estudos para mensurar o impacto em termos de redução da dengue
levam pelo menos 5 anos, de acordo com o National Institute of Health (órgão
equivalente ao Ministério da Saúde americano)(COSEMS-BA, 2012).
As pesquisas para o controle do Aedes Aegypti surgiram de outro estudo para o
controle da moscas-das-frutas, também desenvolvido pela empresa Moscamed.
Nesse estudo também são produzidos machos estéreis de moscas-das-frutas
para controle biológico de pragas agrícolas. O princípio utilizado nas iniciativas
são os mesmos, a criação de insetos estéreis. No caso específico do controle da
dengue o foco do estudo é para o Aedes Aegypti (Rattes, 2011).
Outro estudo para modificar os mosquitos Aedes aegypti tem sido desenvolvido
pelos pesquisadores do Centro de Energia Nuclear na Agricultura (Cena) da
USP, em Piracicaba, e da empresa Bioagri conforme explica USP (2012). A
pesquisa se baseia na radiação gama em uma fonte de Cobalto-60. Os mosquitos sofrem radiação na fase de pupa, infertilizando os mosquitos machos,
que irão copular, porém não fertilizarão as fêmeas. Dessa forma, o ciclo do
2.2
Revisão Bibliográfica
18
mosquito completa-se, porém os ovos não eclodem as larvas, diminuindo a infestação do mosquito. Na empresa Bioagri, em Charqueada, interior de São
Paulo é onde se cria os mosquitos e, no laboratório do Cena, os mesmos são
irradiados. Até a divulgação da pesquisa não se tem determinado a dose esterilizante e também, não houve teste de campo, liberando os mosquitos na
natureza. Logo, não se sabe da compatibilidade desses mosquitos irradiados
com os mosquitos naturais.
Outra forma de controlar a dengue é por meio da educação e conscientização da
comunidade (Santana, 2012), para que possam reduzir, ou remover os criadouros, ou
meios de procriação do vetor. Essa remoção, quando há a presença da fase aquática
do mosquito (ovo, larva e pupa), acarreta na eliminação dessas três fases.
No Brasil, o principal controle utilizado é o químico. Este pode resultar em
mosquitos resistentes aos agentes químicos, o que aumenta o custo de controle já que é preciso expandir as aplicações para se obter um resultado de qualidade e,
pode-se afetar a saúde pública.
Nas últimas décadas, vem sendo reiterada a recomendação do controle integrado
do Aedes aegypti com implementação descentralizada, envolvendo o poder público
e a sociedade. Esse tipo de estratégia teria maior sustentabilidade que aquelas
verticais centralizadas e baseadas em um único método (Donalísio e Glasser, 2002).
2.2
Otimização Mono e Multiobjetivo
Os mecanismos de otimização tratam da questão de determinar a “melhor solução”
de problemas abstratos para os quais é possível quantificar o grau de adequação de
cada solução à necessidade em causa (Takahashi, 2007a). Podemos encontrar diversas situações cotidianas onde o ser humano visa otimizar algo. Takahashi (2007b)
menciona alguns exemplos no qual se aplica métodos de otimização:
• Um engenheiro de produção: busca a melhor configuração possível para encadear as etapas de fabricação de um produto;
• Matemático computacional: propõe modelos quantitativos de epidemias, procurando determinar as melhores políticas de vacinação;
• Um economista: procura o melhor portfólio de investimentos, que maximiza a
expectativa de retorno financeiro;
Na prática, além de minimizar ou maximizar determinado problema ou função,
é necessário atender a certas restrições que correspondem a limitações de natureza
2.2
Revisão Bibliográfica
19
física ou tecnológica. Para atender tais restrições, regiões no espaço de parâmetros
são definidas por meio de desigualdades e/ou igualdades. As soluções do problema
de otimização devem ser procuradas apenas entre as soluções que atendem a tais
desigualdades e/ou igualdades. O problema de encontrar tais soluções é chamado
de problema de factibilidade.
Um problema de otimização combinado com um problema de factibilidade é
conhecido como um problema de otimização mono-objetivo com restrições.
Caso a função objetivo ou o conjunto de restrições sejam lineares em relação à
x, o problema de otimização é linear, do contrário, a função objetivo ou uma das
restrições não sejam lineares em relação à x, tem-se um problema de otimização
não-linear.
2.2.1
Otimização mono-objetivo ou escalar
Na otimização mono-objetivo ou escalar, como o próprio nome diz, busca encontrar
o ótimo de uma função cuja imagem é um escalar. Em geral, sua formulação se
encontra da seguinte maneira:
x∗ = arg min f (x)
x
(
s.a. :
hi (x) = 0, i = 1, ..., p
gj (x) ≤ 0, j = 1, ..., r
(2.1)
(2.2)
onde:
• x ∈ Rn é o vetor de parâmetros ou das variáveis de decisão do problema (são
variáveis cujos valores ótimos devem ser determinados), formando o espaço de
parâmetros X , isto é, X = x ∈ Rn ;
• f : Rn → R a função objetivo, é um funcional matemático em relação à x,
representa o índice de desempenho do sistema;
• os vetores de restrições de igualdade e desigualdade, respectivamente, hi :
Rn → R, i = 1, ..., p e gi : Rn → R, i = 1, ..., r, também são definidas no espaço
dos parâmetros.
Têm-se dois conceitos importantes relacionados às restrições:
• Região factível: Conjunto dos pontos do espaço Rn que satisfazem, simultaneamente, à todas as restrições (tanto de desigualdade quanto desigualdade).
Às vezes a região factível é chamada de conjunto factível, ou de conjunto viável
(Takahashi, 2007b).
2.2
Revisão Bibliográfica
20
• Seja x um ponto viável, isto é, pertencente ao conjunto factível e, hi (x), gj (x),
restrições do problema de otimização. Se:
– hi (x) = 0, então a restrição i é dita ativa em x;
– gj (x) < 0 a restrição j é dita não ativa em x;
– hi (x) 6= 0 e gj (x) > 0 então as restrições i e j são denominadas de
restrições violadas em x, isto é, x é infactível. ;
Podemos ter zero ou mais restrições, e estas em igualdade ou não.
A formulação do problema 2.3 descreve que a solução ótima (x∗ ), deve satisfazer
às “p” restrições em igualdade. Uma forma simples pode ser observada pelo exemplo
exposto na Figura 2.3.
min f (x)
(2.3)
sujeito a : {hi (x) = 0, i = 1, ..., p.
(2.4)
x
Exemplo de otimização restrita em igualdade
10
y
5
0
h(x)
−5
−10
−10
−8
−6
−4
−2
0
x
2
4
6
8
10
Figura 2.3: Exemplo de otimização restrita de igualdade.Na Figura 2.3 são mostradas as
curvas de nível da função objetivo quadrática f (x) e a reta que representa a função da
restrição h(x). O ponto x∗ , ótimo restrito do problema, deverá passar pela reta e pela
curva de nível mais aproximada á reta, sendo assim o melhor ponto factível que toca à
região factível. Ou seja, o ponto (0, 0) não é solução ótima desse problema. Ele é apenas
um ótimo irrestrito.
Se as restrições forem de desigualdade também é necessário o atendimento simultâneo a todas as restrições, conforme é expresso em 2.5 e exemplificado na Figura
2.2
Revisão Bibliográfica
21
2.4.
min f (x)
(2.5)
sujeito a : {gj (x) ≤ 0, j = 1, ..., r.
(2.6)
x
Figura 2.4: Exemplo de otimização restrita de desigualdade. Na Figura 2.4 são mostradas
as curvas de nível da função objetivo linear f (x) e duas restrições: g1 (x) ≤ 0, isto é, valores
pertencentes à reta e abaixo dela e, g2 (x) ≤ 0, ou seja, pontos pertencentes à fronteira da
circunferência e ao interior dela. A região sombreada é a que atende simultaneamente à
ambas restrições, ou interseção das regiões admissíveis. x∗ , ótimo restrito, deverá passar
por essa região e pela curva de nível mais próxima à mesma.
É preciso encontrar os extremos de uma função f de n variáveis no conjunto
admissível, formado por todos os pontos x de Rn , que satisfazem simultaneamente
as p restrições em igualdade e/ou as r restrições em desigualdade.
Pode-se observar que, quando o problema a ser otimizado apresenta apenas uma
função objetivo, cuja imagem é um escalar, a abordagem é classificada como monoobjetivo ou escalar, se houver mais de um objetivo no problema em questão,
tem-se otimização multiobjetivo ou vetorial.
As soluções do problema de otimização, podem ser classificadas em mínimo ou
máximo local ou global:
Seja f : X ⊂ Rn → R. x∗ é um ponto mínimo local de f sobre C se existir
> 0 tal que:
f (x∗ ) ≤ f (x) ∀ x ∈ X ∩ V (x∗ , ),
onde V (x∗ , ) é definido como uma vizinhança de x∗ de raio .
Se X ∩ V (x∗ , ) = X, então, x∗ é mínimo global sobre X.
2.2
Revisão Bibliográfica
22
A definição de ponto máximo é análoga à de ponto mínimo. Na Figura 2.5 temos
um exemplo de ponto mínimo e máximo local e global.
Figura 2.5: Exemplo de gráfico de uma função, destacando máximos e mínimos locais e
globais.
O ponto máximo ou mínimo local ou global é caracterizado conforme a concavidade da função objetivo. Caso a função seja convexa, temos pontos minimizadores
e, caso a função seja côncava, temos pontos maximizadores.
Figura 2.6: Exemplo geométrico de uma função côncava e convexa. Numa função côncava,
um segmento de reta unindo dois pontos, localiza-se abaixo da função. Já numa função
convexa, o segmento de reta localiza-se sempre acima da função.
2.2
Revisão Bibliográfica
23
Caso a função objetivo seja convexa, o mínimo local é também o mínimo global;
no caso da função ser côncava o máximo será global (Barros et al., 2009).
2.2.1.1
Condições de Otimalidade - Caso Irrestrito
Para que o mecanismo de otimização seja capaz de determinar o vetor x∗ que minimiza o funcional f (x) determinadas condições devem ser satisfeitas:
Definição 1. Condições de Primeira Ordem Considere f de classe 5 C 1 sobre um
conjunto aberto X . Se o gradiente6 de f num ponto x∗ pertencente a X é nulo
(∇f (x∗ ) = 0), então x∗ é um ponto crítico de f .
Definição 2. Condições de Segunda Ordem
Considere f : X ⊂ Rn −→ R, de classe C 2 e x∗ um ponto crítico de f no interior
do conjunto X .
Seja (H(x∗ )) a matriz Hessiana7 de f .
Se a matriz Hessiana for:
1. positiva definida, x∗ é mínimo local de f ;
2. negativa definida, x∗ é máximo local de f ;
3. indefinida, x∗ é ponto de sela;
4. positiva semidefinida ou negativa semidefinida, x∗ é máximo local ou mínimo
local ou ponto de sela de f .
Uma das formas de analisar a condição da matriz hessiana F (x∗ ) pela sua contribuição no termo de segunda ordem da expansão em série de Taylor 8 em torno do
ponto ótimo:
Considere:
Q : Rn −→ R
h −→ Q(x) = xT .F.x
F ou a forma quadrática Q(x) associada a F será:
1. positiva definida se Q(x) > 0; ∀ x 6= 0 ∈ Rn ;
Funções de classe C k : Uma função f : Df ⊂ Rn → R é dita de classe C k quando existem
todas derivadas parciais de ordem ≤ k e estas, são contínuas em Df (Bortolossi, 2002)
6
O gradiente de uma função f é o vetor do Rn denotado ∇f (x) e definido como vetor das
∂f
∂f
∂f
derivadas parciais ∇f (x) = ( ∂x
(x), ∂x
(x)... ∂x
(x)).
1
2
n
7
Matriz hessiana é a matriz de segundas derivadas parciais de uma função f .
8
O polinômio de Taylor de ordem 2 está elucidado em Bortolossi (2002)
5
2.2
Revisão Bibliográfica
24
2. positiva semidefinida se Q(x) ≥ 0; ∀ x 6= 0 ∈ Rn ;
3. negativa definida se Q(x) < 0; ∀ x 6= 0 ∈ Rn ;
4. negativa semidefinida se Q(x) ≤ 0; ∀ x 6= 0 ∈ Rn ;
5. indefinida se ∃ x e k ∈ Rn tal que: Q(x) > 0 e Q(x) = k T .A.k < 0.
É importante observar que as condições suficientes não são necessárias, uma vez
que, x∗ pode ser um extremo local e não satisfazer as condições suficientes.
2.2.1.2
Condições de Otimalidade - Caso restrito
A seguinte condição de primeira ordem para otimalidade de um problema genérico
de otimização, apresentada por Kuhn e Tucker em 1951, possui importância histórica, servindo de base para diversos algoritmos numéricos de otimização existentes
(Takahashi, 2007a).
Teorema 2.1. Condições necessárias de primeira ordem ou condições de
Karush-Kuhn-Tucker (KKT)
Seja f, g ∈ C 1 e x∗ um ponto ótimo sujeito às restrições do problema e ponto
regular9 para as restrições.
Então, ∃λ ∈ Rp e µ ∈ Rr , µ ≥ 0, multiplicadores de Lagrange, tais que:
∇f (x∗ ) + λT ∇h(x∗ ) + µT ∇g(x∗ ) = 0,
T
∗
µ g(x ) = 0,
Supondo as condições de primeira ordem satisfeitas, temos:
Teorema 2.2. Condições de segunda ordem: Sejam f, h, g ∈ C 2 e x∗ é ponto
regular.
Se x∗ é mínimo local, ∃λ ∈ Rp e µ ∈ Rr , µ ≥ 0, tais que:
• ∇f (x∗ ) + λT ∇h(x∗ ) + µT ∇h(x∗ ) = 0;
µT g(x∗ ) = 0.
• a matriz L(x∗ ) = F (x∗ ) + λT H(x∗ ) + µT G(x∗ ) = 0 é definida positiva. Onde,
F , H e G são matrizes hessianas, isto é, matriz de derivada segunda de f , h e
g.
9
Um ponto x* é denominado ponto regular se os gradientes das restrições ativas neste ponto
forem linearmente independentes.
2.2
Revisão Bibliográfica
25
Para mais detalhes a respeito do teorema de condições de segunda ordem, como
a demonstração desse teorema, vide (CP Simon e L. Blume, 1994 apud Bortolossi,
2002).
2.2.2
Otimização multiobjetivo ou vetorial
Sabe-se que muitas vezes é necessário atender à várias funções-objetivo distintas,
não necessariamente comparáveis entre si. Desta forma, temos um problema com
diversas funções a serem otimizadas simultaneamente. Tal problema é chamado de
problema de otimização multiobjetivo (vetorial) e pode ser expresso por:
x∗ = arg min(f1 (x), f2 (x), ..., fm (x))
x
(
hi (x) = 0, i = 1, ..., p
s.a. :
gj (x) ≤ 0, j = 1, ..., r
(2.7)
(2.8)
em que, m são os objetivos distintos do problema. As demais grandezas são
análogas às equações 2.1 e 2.2.
Em problemas de otimização vetorial visamos encontrar soluções que representam soluções de compromisso entre todos os objetivos do problema.
Os conceitos básicos de otimização multiobjetivo são:
Espaço de objetivos (Y): Composto pelos vetores f , ou seja, pelas funções objetivos.
Espaço de parâmetros (X ): Formado pelas variáveis de decisão (x) do problema.
Dominância: Sabendo que, as operações de comparação entre vetores pertencentes
ao espaço Rn são definidas da seguinte forma:
x y ⇒ xi ≤ yi , i = 1, ...n
x ≺ y ⇒ xi < yi , i = 1, ...n
x = y ⇒ xi = yi , i = 1, ...n
x 6= y ⇒ ∃i|xi 6= yi
Definição 3. Diz-se que o ponto x1 ∈ X domina o ponto x2 ∈ X se f (x1 ) ≤
f (x2 ) e f (x1 ) 6= f (x2 )
Soluções eficientes ou Pareto-ótimas:
2.2
Revisão Bibliográfica
26
Definição 4. Diz-se que x∗ , pertencente ao conjunto de pontos factíveis, é uma
solução Pareto-ótima do problema de otimização multiobjetivo se não existe
qualquer outra solução x presente na região factível, tal que f (x) ≤ f (x∗ )
e f (x) 6= f (x∗ ), ou seja, se x∗ não é dominado por nenhum outro ponto
admissível.
Conjunto Pareto-ótimo ou de soluções eficientes: Conjunto que contém as possíveis soluções x∗ do problema de otimização vetorial.
A Figura 2.7 exemplifica pontos dominados e não dominados no espaço dos
objetivos. E a Figura 2.8 ilustra um conjunto Pareto-ótimo.
Figura 2.7: Exemplo de solução dominada. Neste esboço é mostrado o ponto A, B e C
pertencente ao espaço dos objetivos, porém apenas B e C pertencentes ao conjunto Paretoótimo. Um cone paralelo aos eixos coordenados é colocado com vértice em B e outro em C
(traços pontilhados). O ponto A está no interior dos dois cones, portanto, A é dominado
por B e C.
Dessa forma, existem dois tipos de soluções para tais problemas: soluções que serão suplantadas por outras soluções, ou seja, têm-se soluções que conseguem valores
menores de função objetivo para todos os m objetivos; soluções eficientes (Paretoótimas), que fornecem um objeto, ou conjunto de pontos, bem determinado.
Posteriormente, será necessária uma etapa de busca sobre o conjunto Paretoótimo, supondo a existência dentro do decisor de uma função utilidade, que significa
um padrão de preferência coerente e ordenado.
2.2
Revisão Bibliográfica
27
Figura 2.8: Conjunto Pareto-otimo.Conjunto Pareto-ótimo representado em linha contínua
(Y ∗ ∈ Y). Isto é, as soluções eficientes estão entre yA e yB . FONTE - Takahashi, 2007b.
Definição 5. Solução Eficiente ou Pareto-Ótima Local
Considere Fx o conjunto dos pontos admissíveis, subconjunto de X .
Diz-se que x∗ ∈ Fx é uma solução localmente Pareto-Ótima de um problema de
otimização vetorial numa dada vizinhança N (x∗ , δ) se existe δ > 0 tal que não exista
qualquer outra solução x ∈ N (x∗ , δ) ∩ Fx que faça f (x) ≤ f (x∗ ) e f (x) 6= f (x∗ ), ou
seja, se x∗ não é dominado por nenhum outro ponto naquela vizinhança.
Se todas as funções objetivo são convexas, qualquer solução eficiente local é
também uma solução eficiente global, conforme Sampaio (2011).
2.2.2.1
Condições de otimalidade
Para se definir um conjunto de pontos que seja representativo do conjunto Paretoótimo, em resumo, deve-se:
• localizar tais pontos;
• estabelecer condições que garantam que os mesmos realmente pertençam ao
conjunto de soluções eficientes.
Para isso, definimos a seguir as condições de otimalidade para problemas de
otimização multiobjetivo:
2.2
Revisão Bibliográfica
28
Teorema 2.3. Se x∗ é eficiente então x∗ resolve os m problemas:
(Pi , i = 1, ..., m)
minx∈Fx fi (x)
sujeito a fj (x) ≤ fj (x∗ )∀j 6= i
Reciprocamente, se x∗ resolve (Pi , i = 1, ..., m) então x∗ é eficiente.
Desta forma, as condições de Kuhn-Tucker para cada problema Pi seriam:
λ∗j ≥ 0; µ∗k ≥ 0
g (x∗ ) ≤ 0; µ∗ g (x∗ ) = 0, k = 1, ..., p
k
k k
p
X
X
∗
∗
∗
λj ∇fi (x ) +
µ∗k ∇gk (x∗ ) = 0; com∇fi (x∗ ) 6= 0
∇fi (x ) +
j6=i
k=1
Baseado nas condições de Kuhn-Tucker de cada problema separadamente, podese definir a condição geral:
Definição 6. Uma solução factível x∗ satisfaz as condições necessárias de KuhnTucker para eficiência se:
1. todos fi e gi são diferenciáveis ou de classe C 1
2. existem vetores multiplicadores µ∗ ≥ 0, λ∗ ≥ 0, com pelo menos uma desigualdade estrita λ∗i > 0, tais que:
gk (x∗ ) ≤ 0; µ∗k gk (x∗ ) = 0, k = 1, ..., p
m
X
j=i
λ∗j ∇fi (x∗ )
+
p
X
µ∗k ∇gk (x∗ ) = 0
k=1
Essas condições são apenas necessárias e não suficientes para auxiliar na determinação das soluções eficientes. Porém, sob certas condições, elas se tornam
suficientes:
Teorema 2.4. Condição 1:
Se o problema multiobjetivo atender as Condições de Kuhn-Tucker para Eficiência em x∗ com todos os multiplicadores λ∗i , i = 1, ..., m estritamente positivos,
então, x∗ é uma solução eficiente.
2.3
Revisão Bibliográfica
29
Teorema 2.5. Condição 2:
Se o problema mutiobjetivo atender as Condições de Kuhn-Tucker para Eficiência
e tiver todas as funções fi (.), i = 1, ..., m e gk (.), k = 1, ..., p estritamente convexas,
então, x∗ é uma solução eficiente.
Takahashi (2007c) apresenta a demonstração dos dois teoremas acima.
Diferentes métodos podem ser utilizados para gerar as soluções eficientes do
problema de otimização vetorial. Cada método apresenta suas vantagens, como:
simplicidade computacional, capacidade de gerar o espaço de parâmetros mesmo
que o problema seja não-convexo, garantia da factibilidade de toda execução realizada sobre o problema de otimização vetorial factível, dentre outras; e algumas
desvantagens, por exemplo, certos métodos só se aplicam a problemas convexos, ou
geram soluções não eficientes. Portanto, não existe um que seja melhor do que o
outro.
Um dos métodos consiste na escalarização do problema multiobjetivo. Chamamos de escalarização a transformação de um problema com vários objetivos em outro
com apenas um objetivo (Sampaio, 2011).
Nesse trabalho, considera-se que o conjunto Pareto-ótimo é obtido via Algoritmos
Genéticos, em que se procura otimizar diretamente sobre todo o conjunto de funções,
em vez de considerar técnicas de escalarização.
2.3
Algoritmos Genéticos
Algoritmos Evolucionários ou Evolutivos são paradigmas computacionais inspirados
pelo processo estocástico de evolução natural. Estes algoritmos englobam um número crescente de métodos, dentre os quais se destacam os Algoritmos Genéticos
(AGs ), devido a sua flexibilidade, relativa simplicidade de implementação, e eficácia
em realizar busca global em ambientes diversos.
Tanomaru (1995) define Algoritmos Genéticos como sendo métodos computacionais de busca baseados nos mecanismos de evolução natural e na genética. Em AGs,
uma população de possíveis soluções para o problema em questão evolui de acordo
com operadores probabilísticos concebidos a partir de metáforas biológicas, de modo
que exista uma tendência de que, na média, os indivíduos representem soluções cada
vez melhores à medida que o processo evolutivo continua.
Segundo Von Zuben (2000), a vantagem mais significativa da computação evolutiva está na possibilidade de resolver problemas pela simples descrição matemática
do que se quer ver presente na solução, não havendo necessidade de se indicar explicitamente os passos até o resultado, que certamente seriam específicos para cada
2.3
Revisão Bibliográfica
30
caso. É lógico que os algoritmos evolutivos correspondem a uma sequência de passos
até a solução, mas estes passos são os mesmos para uma ampla gama de problemas,
fornecendo robustez e flexibilidade. Sendo assim, a computação evolutiva deve ser
entendida como um conjunto de técnicas e procedimentos genéricos e adaptáveis, a
serem aplicados na solução de problemas complexos, para os quais outras técnicas
conhecidas são ineficazes ou nem sequer são aplicáveis.
Os AGs foram introduzidos no início da década de 70, por Holland da Universidade de Michigan, mas só obtiveram popularidade nos anos 80 pela publicação de
um livro de Goldberg, aluno de doutorado de Holland Tanomaru (1995).
Os Algoritmos Genéticos empregam uma terminologia originada da teoria da
evolução natural e da genética. Um indivíduo da população é representado por um
único cromossomo, o qual contém a codificação (genótipo) de uma possível solução
do problema (fenótipo). Cromossomos são usualmente implementados na forma
de listas de atributos ou vetores, onde cada atributo é conhecido como gene. Os
possíveis valores que um determinado gene pode assumir são denominados alelos
(Von Zuben, 2000).
Estes algoritmos operam num conjunto de pontos, num espaço de busca de soluções codificadas; não necessitam de derivadas, somente de informação sobre o valor
de uma função objetivo para cada membro da população; usam transições probabilísticas e não determinísticas. Além disso, eles se caracterizam como técnicas robustas
de otimização de funções multivariáveis, multimodais e possivelmente descontínuas.
Puros ou combinados com outros métodos, os Algoritmos Genéticos têm sido
aplicados com sucesso à diversos problemas, havendo patentes e produtos desenvolvidos com sua utilização. Listando apenas algumas áreas de aplicação e, alguns
trabalhos já feitos, observam-se:
• Geração de trajetória de um braço robô, como a simulação realizada por Heinen e Osório (2007) para evolução dos parâmetros do caminhar em robôs
móveis;
• Resolução de problemas em produção de empresas, por exemplo, em antecipação e atraso de produção como trabalha Ribeiro (2009);
• Algoritmos genéticos combinados com redes fuzzy têm apresentado melhores
resultados do que trabalhados isoladamente,como explica Cordón et al. (1997);
• Otimizações de equações diferenciais ordinárias com problemas de valor inicial, por exemplo na escolha de parâmetros de modelos ecológicos, conforme o
trabalho realizado por Sá (2003);
• Otimização de antenas refletoras (Ávila, 2002);
2.3
Revisão Bibliográfica
31
• Modelos econômicos: modelos do processo de inovação, estratégias de concorrência, como na identificação de possibilidades de convívio de diferentes grupos
estratégicos, associados ao uso ou à produção de tecnologias convencionais ou
inovadoras (Kimura et al., 2005);
• Alocação de agentes para controle de epidemias utilizando um Algoritmo Genético (Lacerda et al., 2010).
Percebe-se então, o quão é importante o estudo dos AGs.
Um Algoritmo Genético deve apresentar a seguinte estrutura básica, onde t representa cada geração ou iteração de um AG. :
Algoritmo 1: Procedimento do Algoritmo Genético Simples
início
Inicializar população inicial (P (t = 0))
Avaliar população (P (t))
enquanto não critério de parada faça
Seleção
Cruzamento
Mutação
Avaliar (P (t))
fim
Nem todos os indivíduos de uma população são necessariamente “filhos” de indivíduos da população na iteração anterior, por exemplo, os que não foram selecionados.
Os componentes presentes nos Algoritmos Genéticos Simples são:
1. Representação da Solução
Para aplicação dos AGs a um certo problema, deve-se primeiramente representar cada possível solução x no espaço de busca como sequência de símbolos
s gerados a partir de um dado alfabeto finito. Para tal, pode ser adotado um
vetor binário. Essa utilização foi motivada quando Holland tentava explicar
o poder computacional dos AGs e então, originou o conceito de “esquemas”
(schemata). Tanomaru (1995) diz que um esquema poderia ser pensado como
um molde (em inglês, “template”) representando um conjunto de cromossomos.
Considerando o alfabeto binário e cromossomos l caracteres, gerados a partir
do alfabeto estendido 0,1,*, onde ’*’ representa um “coringa”, podendo ser 0
ou 1. Outra forma de representação utilizada é por números reais, ou seja,
cada indivíduo corresponde a um vetor no espaço Rn .
2. Geração da População Inicial
2.3
Revisão Bibliográfica
32
Em AGs assume-se que cada indivíduo seja constituído de um único cromossomo, por isso é comum encontrar em textos científicos, os termos indivíduos
e cromossomos indistintamente. Na maioria dos Algoritmos Genéticos propostos a população é caracterizada por um número fixo de indivíduos, com
cromossomos também de tamanho constante.
Comumente, a inicialização dos n indivíduos é feita de maneira aleatória ou
por algum processo heurístico.
3. Avaliação da População Inicial
Em problemas de otimização escalar têm-se apenas um objetivo a ser alcançado, que é representado por uma função objetivo. Esta, atribui para cada indivíduo, uma medida de quão bem adaptado ao ambiente ele está. A avaliação
de cada indivíduo resulta num valor, denominado fitness ou adequabilidade.
4. Seleção
Os Algoritmos Genéticos utilizam mecanismos de seleção para a próxima geração. Geralmente, é gerada uma população temporária de indivíduos extraídos
com probabilidade proporcional ao fitness. Quanto menor o fitness de um indivíduo, maior a chance dele desaparecer da população. A probabilidade de
um cromossomo s ser selecionado é dada por:
psel =
a(s)
N
X
a(si )
i=1
onde, N é o número de indivíduo da população, a(.) é a função do fitness.
5. Cruzamento, Recombinação ou Crossover
Neste processo, são criados novos indivíduos partindo da combinação de indivíduos. Há troca de fragmentos entre pares de cromossomos. Em AGs simples,
esse processo ocorre de forma aleatória, com probabilidade fixa aos indivíduos
da população.
Conforme a representação das variáveis, a reprodução sexual pode ser:
• Cruzamento binário: A partir de um ou mais ponto escolhido aleatoriamente, troca-se os segmentos entre os indivíduos (pais), e, gera-se novos
indivíduos (filhos).
• Cruzamento real: Une-se dois pontos (indivíduos) formando um segmento
de reta. Sobre qualquer ponto deste segmento de reta estará os novos
2.3
Revisão Bibliográfica
33
indivíduos gerados. Tem-se também o cruzamento real polarizado, onde
um indivíduo (filho) é gerado sem polarização e o outro com polarização.
Este último, ocorre com probabilidade ppol de ser gerado, ou seja, com
maior chance de “nascer”mais próximo do melhor pai.
Takahashi (2007b) detalha o Algoritmo Genético Binário e o Algoritmo
Genético Real Polarizado.
6. Mutação
No processo de mutação, um ou mais genes do cromossomo é modificado aleatoriamente. A chance de um gene sofrer mutação é indicada por uma taxa
fixa.
Os operadores (seleção, recombinação e mutação) são fundamentais em Algoritmos Genéticos:
Se não houvesse o processo de seleção, os AGs, além de perderem
grande parte do carácter evolutivo, seriam processos ineficientes similares
a buscas aleatórias. Sem recombinação, haveria somente busca aleatória
a partir dos melhores elementos da população. Combinados, os processos de seleção e recombinação realizam uma espécie de busca local nas
proximidades dos melhores indivíduos da população. Finalmente, sem
mutação os AGs efetuariam busca usando somente a informação contida na população e, não teriam como repor material genético perdido
durante o processo de seleção (Tanomaru, 1995).
Ao se trabalhar com os Algoritmos Genéticos pode-se deparar com determinados
problemas, como:
• Escolha dos parâmetros: Todos os AGs usam, pelo menos, três parâmetros
numéricos: probabilidade de recombinação (prec ), probabilidade de mutação
pmut e tamanho da população. No entanto, não existe regra clara para determinação destes parâmetros. Quanto às probabilidades de recombinação e
mutação, (DeJong, 1975 De Jong (1975) apud Tanomaru, 1995), afirma que
estudos empíricos têm mostrado que bons resultados geralmente são obtidos
com alto valor de prec (≥ 0, 7) e baixo valor para pmut (≤ 0, 01). Já para o
tamanho da população, têm-se em mente que “quanto mais melhor”, porém,
na prática se trabalha com populações finitas e o seu tamanho é indicado
conforme a complexidade do problema. Pode-se precisar de uma população
grande, por exemplo na geração automática de programas ou de pequenas populações, como em casos onde a avaliação de um cromossomo é excessivamente
lenta.
2.3
Revisão Bibliográfica
34
• Erros de amostragem: Pode resultar na perda de informação genética importante e a resultados de baixa qualidade. Exemplo: na seleção por roleta 10 ,
pode-se obter cópias apenas do pior individuo de uma população.
• Convergência Prematura: É quando um AG converge rapidamente, ou em
poucas gerações, para um ponto de alta qualidade, mas não é o ótimo global.
O que pode ter como consequência, a perda da diversidade da população.
• Problemas enganadores: São problemas onde os fragmentos cromossômicos
que têm um fitness alto em separado, porém juntos, formam uma solução nãoótima.
Técnicas para melhoria dos AGs Tentando solucionar os problemas citados anteriormente, várias técnicas têm sido propostas para melhorar a eficiência de busca
genética, como:
• Corte: Uma maneira de minimizar os erros por amostragem. Neste método,
“corta-se” todos os pontos cujo fitness seja menor que a média por mais de
um valor fixo, especificado em termos do desvio padrão. Exemplo: atribuir
fitness=0 para todos os indivíduos com adequabilidade menor que a média
menos duas vezes o desvio padrão.
• Escalonamento: Visa limitar o número de cópias de um mesmo indivíduo
na próxima geração e evitar que “super-indivíduos” dominem a população no
início da busca, geralmente produzem melhores resultados na otimização de
funções multimodais. Em Tanomaru (1995), encontramos, uma técnica de
escalonamento proposta por Goldberg.
• “Janela” de adequabilidade: Outro método para suavizar a convergência
prematura. Nele, subtrai-se o menor valor da “adequabilidade crua” - é quando
se utiliza a função de maximização como medida de adequabilidade - de todos
os valores antes do processo de seleção, de modo que o pior indivíduo fica
impossibilitado de ter descendentes na próxima geração.
• Formação de nicho: Diferentes espécies e que tenham papéis ou nichos ecológicos também diferentes, podem conviver num mesmo ambiente, não competindo entre si. Pode-se introduzir o conceito de nicho em Algoritmos Genéticos,
assim, trabalha-se com subpopulações, agregando novas características dos indivíduos. Essa ideia conduziu ao conceito de partilha ou compartilhamento,
10
Na seleção por roleta cada indivíduo ocupa uma porção da roleta proporcional à sua função
de aptidão.
2.4
Revisão Bibliográfica
35
surgindo novas técnicas, como, função de partilha de Goldberg e o SSS (Simple
Subpopulation Schemes), proposto por Spears.
•
AGs paralelos: Tentando solucionar o problema de baixa velocidade de
execução dos AGs, vários modelos de implementação de AGs em computadores
paralelos têm sido propostos.
Ankenbrandt(1991) apud Tanomaru, 1995, partiu de um AG simples e demonstrou que, se a razão da adequabilidade11 (r), for constante e conhecida, a complexidade computacional do AG obedecerá a:
O(AG) ∝ O(a(.))
N lnN
lnr
onde, O(AG) indica a complexidade computacional do AG simples com seleção
proporcional à adequabilidade, O(a(.)) é a complexidade da função de avaliação,
que depende do problema específico e, N é o número de indivíduos da população.
Ainda que esse resultado dê uma ideia da relação entre o tempo do AG até a
convergência e o tamanho da população, na prática é bem improvável que a razão
de adequabilidade seja constante.
2.4
NSGA II - Nondominated Sorting Genetic Algorithm II
Na década de 90 surge um método de atribuição de aptidão para algoritmos genéticos multiobjetivos, o NSGA - Nondominated Sorting Genetic Algorithm, cujo foco
principal é classificar os indivíduos em fronteiras não-dominadas. O que diferencia
o NSGA do Algoritmo Genético simples é apenas o processo de execução de seleção.
Guimarães (2005) explica que a ideia de ordenação por fronteiras não dominadas
consiste em atribuir um valor de aptidão para cada fronteira não dominada. O
NSGA clássico usava função de partilha para degradar os valores de aptidão entre
indivíduos de uma mesma fronteira muito próximos entre si.
O NSGA-II, proposto por Deb et al. (2000), baseia-se em classificação por não
dominância para calcular o valor de aptidão dos elementos da população genética.
Este, é uma versão melhorada do NSGA, diferindo deste último por apresentar
ordenação por dominância mais rápida, complexidade computacional menor, utilizar
11
Razão de adequabilidade: quociente entre a média da adequabilidade dos cromossomos com um
dado alelo pelo valor médio de adequabilidade de todos os cromossomos da população (Tanomaru,
1995)
2.4
Revisão Bibliográfica
36
o elitismo e extinção dos parâmetros de nicho, por meio do uso de outra estratégia
de medida de dispersão.
Assim, conforme Alexandre (2010) o NSGA-II cria um novo conceito chamado
de crowding distance (distância de multidão) que se torna responsável por manter a
diversidade da população. Também define um método chamado crowded comparison
que tem como objetivo comparar as soluções geradas. O NSGA-II trabalha com
população conjunta, ou seja, com uma população pai para gerar uma população
filha.
O elitismo no NSGA-II é mantido simplesmente realizando comparações de dominância entre a população anterior e a atual. Os n primeiros elementos não dominados formam a próxima população. Novos pontos podem ser adicionados em toda
geração, mas há um acréscimo no custo computacional com a comparação de duas
populações (Soares, 2008).
O algoritmo NSGA-II funciona da seguinte maneira: Na primeira iteração, gerase uma população aleatória P0 , a qual é ordenada por não dominância. Cada solução
tem um valor de aptidão igual ao seu nível de não-dominância (1 é o melhor nível,
2 é o seguinte melhor nível e assim por diante). Depois, aplicando os operadores de
seleção por torneio 12 , cruzamento e mutação obtém-se a população filha Q0 . Tanto
P como Q são de tamanho N (Júnior, 2009). Essas populações são agrupadas,
formando uma nova população: Rt ←− Pt ∪ Qt de tamanho 2N . Rt é ordenada por
não dominância, obtendo assim, as melhores soluções, formando as fronteiras Pareto
(Fj ).
Contudo, apenas algumas soluções contidas nestes conjuntos são inseridas na
próxima população Pt+1 . Assim, N soluções da população Rt são descartadas. Com
isso, faz-se necessário um procedimento competitivo para realizar o preenchimento
da população Pt+1 . Para realizar o preenchimento da população Pt+1 sao utilizados
os dados das soluções encontradas nos conjuntos F1 , F2 ,... sendo as mesmas inseridas
em sua totalidade em Pt+1 enquanto |Pt+1 |+|Fj | ≤ N . Ao encontrar um conjunto Fj
onde esta condição seja falsa, ou seja, |Fj | > N − Pt+1 , o algoritmo NSGA-II escolhe
as soluções presentes na fronteira Fj que estejam mais bem espalhadas (Alexandre,
2010).
Visando escolher as soluções dissipadas na fronteira de Pareto para pertencer
à Pt+1 , o NSGA-II utiliza o crowding distance que representa uma estimativa do
perímetro formado pelo cuboide cujos vértices são as soluções vizinhas mais próximos. Quanto maior o cuboide de uma solução t, mais afastada essa solução está
das suas soluções vizinhas. Segundo Júnior (2009) as soluções extremas em cada
12
Seleção por torneio consiste na comparação entre duas soluções, quando baseada na técnica de
multidões, observa-se as variáveis não-dominadas e a distância de multidão.
2.4
Revisão Bibliográfica
37
fronteira terão um valor infinito para sua distância de multidão, uma vez que estas
são as mais dispersas na fronteira, desta maneira a distância de multidão para estas
soluções não são calculadas, e sim atribuído a elas o valor infinito.
Figura 2.9: Cálculo da distância de multidão do NSGA-II. FONTE - Deb et al., 2000.
O cálculo da distância de multidão precisa de ordenamento dos conjuntos Fj de
acordo com as distâncias dj . Em seguida, copiam-se as N − |Pt+1 | soluções de Fj
para Pt+1 . Por fim, gera-se Qt+1 a partir da aplicação de seleção por torneio de
multidão para os indivíduos de Pt+1 e, cruzamento e mutação. Esses últimos de
maneira tradicional.
O algoritmo NSGA-II utiliza um operador comparativo, considerando a distância de multidão de uma solução. Esse método é denominado crowded tournament
selection operator e, a síntese de seu funcionamento é a seguinte:
Uma solução i é dita ganhadora quando comparada a uma solução j se:
1. A solução i possui um melhor nível de não dominância, isto é, ri < rj ;
2. Se ambas as soluções pertencerem à mesma fronteira Pareto, porém, i tem
uma distância de multidão maior, di > dj
.
2.4
Revisão Bibliográfica
A seguir, um pseudo-código do NSGA-II é apresentado:
Algoritmo 2: Pseudocódigo do algoritmo NSGA - II
Dados:
P: População pai
Q: População filha
N: Tamanho fixo para P e Q
Fj : Conjunto de soluções na fronteira j
t: Número da geração atual
início
t←0
enquanto não critério de parada faça
Executar seleção, cruzamento e mutação para gerar a população filha
Q0
Rt ←− Pt ∪ Qt
Ordenar Rn por não dominância (Fj ∀j são as fronteiras não
dominadas)
Criar Pt+1 = ∅
j=1
enquanto |Pt+1 + Fj | ≤ N faça
Copiar as soluções Fj para Pt+1
j =j+1
Calcular as distâncias de multidão em Fj
Ordenar Fj conforme distâncias dj
Copiar as primeiras N − |Pt+1 | soluções de Fj para Pt+1
Aplicar torneio por multidão para os indivíduos de Pt+1
Aplicar os operadores de cruzamento e mutação para gerar Qt+1
t←t+1
fim
38
Capítulo 3
Modelo Matemático da Dengue
Modelos matemáticos têm sido fundamentais no estudo e controle da dengue. Na
literatura encontra-se modelos com diferentes objetivos de pesquisa, tais como: descrever a transmissão entre humanos e mosquitos, simular a progressão da epidemia,
prever a dinâmica evolutiva do vetor em relação a determinada estratégia de controle. A fim de analisar a inserção de macho estéril no meio ambiente para o controle
da dengue, Esteva e Yang (2006) propuseram um modelo matemático. Para tal, o
ciclo de vida do Aedes Aegypti é dividido em fase imatura ou aquática (ovo, larva e
pupa) e fase adulta ou alada. Apoiando-se nesse modelo, Thomé (2007) descreve a
dinâmica populacional do vetor com controle por meio de inseticida e liberação de
mosquitos estéreis.
Este modelo descreve a população de mosquitos naturais dividida em seis compartimentos:
• A(t): mosquitos na fase aquática.
• Na fase adulta ou fase alada temos:
– I(t): fêmeas imaturas ou não acasaladas;
– F(t): fêmeas fertilizadas após o acasalamento;
– U(t): fêmeas não fertilizadas depois de acasalar;
– M(t): machos naturais;
– S(t): machos estéreis.
Os parâmetros adotados no sistema dinâmico foram os seguintes:
• µ representa a taxa de mortalidade natural dos vetores;
• φ determina a taxa de oviposição intrínseca das fêmeas fertilizadas;
39
3.0
Modelo Matemático da Dengue
40
• C é a capacidade do meio relacionada como o número de nutrientes, criadouros
disponíveis, dentre outros para proliferação dos vetores na fase aquática;
• γ refere a taxa com que os vetores evoluem da fase aquática para a fase alada,
onde uma proporção r são de fêmeas e (1 − r) são de machos;
• β representa a taxa de acasalamento dos machos naturais;
• βS refere a taxa de acasalamentos entre machos estéreis e fêmeas imaturas;
• α determina a taxa de mosquitos estéreis colocados no meio ambiente.
Desta forma, o sistema de equações que representa o controle por liberação de
mosquitos inférteis é o seguinte:
dA
dt
= φ(1 − CA )F − (γ + µA )A
dI
dt
= rγA −
dF
dt
=
dU
dt
=
dM
dt
= (1 − r)γA − µM M
dS
dt
= α − µS S
βM I
M +S
βM I
M +S
−
βs SI
M +S
− µI I
− µF F
(3.1)
βs SI
M +S
− µU U
O modelo dinâmico da dengue (3.1) descreve:
1a equação: A população de mosquitos na fase aquática A aumenta proporcionalmente à taxa de oviposição das fêmeas fertilizadas F em relação à sua densidade φ, ponderada pela capacidade do meio C (relacionada com o número
de nutrientes, espaço físico, etc). O número de indivíduos dessa fase diminui
conforme a mortalidade dos mosquitos na fase aquática µA e de acordo com a
quantidade de mosquitos que passam para a fase alada a uma taxa γ, em que
uma proporção r são de fêmeas e (1 − r) são de machos.
2a equação: A população de fêmeas imaturas I cresce com as fêmeas que vieram
da fase aquática A à taxa γ. Os termos βM I/(M + S), βs S/(M + S), µI I representam respectivamente, a diminuição dessa população pela probabilidade
3.0
Modelo Matemático da Dengue
41
de encontro entre uma fêmea imatura com um macho natural; a esperança de
acasalamento entre uma fêmea imatura e um mosquito estéril ou irradiado,
conforme a colocação destes nos lugares adequados e a efetiva fertilização de
ambos, visto que a irradiação pode diminuir a chance de ocorrer fertilização;
e a mortalidade das fêmeas imaturas.
3a equação: A população de fêmeas fertilizadas F . Esta, é formada pela união
entre as fêmeas imaturas com machos naturais M . O número de mosquitos
dessa classe pode chegar à mortalidade de forma natural, ou por exemplo, pelo
uso de inseticida, levando à diminuição da população.
4a equação: A população das fêmeas não fertilizadas U . Esta, depende apenas das
fêmeas que mesmo realizando o coito com um macho irradiado, não fecundaram. Essa população pode reduzir de acordo com a mortalidade dessas fêmeas
não fertilizadas.
5a equação: A população de machos naturais M aumenta proporcionalmente aos
mosquitos machos naturais, que vieram da fase aquática a uma taxa γ e se
subtrai conforme vão morrendo.
6a equação: A população de machos estéreis S introduzida no meio ambiente a
uma taxa constante α. Essa população decresce em relação aos que morrem.
A população de mosquitos fêmeas não fertilizadas (U ) está desacoplada do sistema, isto é, as outras equações não dependem da variável U . Isso representa o
fato de que as fêmeas picam apenas para amadurecer seus ovos, logo as fêmeas não
fertilizadas não transmitem a dengue. Dessa forma, podemos considerar o seguinte
sistema dinâmico, sem a equação que envolve dU/dt:
dA
dt
= φ(1 − CA )F − (γ + µA )A
dI
dt
= rγA −
dF
dt
=
dM
dt
= (1 − r)γA − µM M
dS
dt
= α − µS S
βM I
M +S
βM I
M +S
−
βs SI
M +S
− µF F
− µI I
(3.2)
3.0
Modelo Matemático da Dengue
42
Thomé (2007) estudou a dinâmica do sistema mostrado na Equação 3.2, encontrando analiticamente seus pontos de equilíbrio e analisando a estabilidade do
sistema dinâmico em função de seus parâmetros.
O sistema 3.2 possui um ponto de equilíbrio trivial em P0 = (0, 0, 0, 0, µαS ), com
U0 = 0. Independente das condições iniciais, a população de mosquitos estéreis
encontra-se em equilíbrio em µαS . O ponto de equilíbrio não trivial (A0 , I0 , F0 , M0 , µαS )
satisfaz a relação:
I0 =
F0 =
M0 =
rγA0 (M0 + µα )
S
(µI +β)M0 +(µI +βs ) µα
S
(3.3)
(γ+µA )CA0
φ(C−A0 )
(1−r)γA0
µM
A0 é solução da equação:
p(A) = aA2 + bA + c = 0
Em que:
a = CR
b = 1−R
c = CQ
(3.4)
Onde,
R=
φrγβ
(γ + µA )(β + µI )µF
Q=
(βs + µI )µM α
C(β + µI )(1 − r)γµS
As fêmeas não fertilizadas são dadas por:
U0 =
αβs I0
µU (µS M0 + α)
As condições para existência biológica do equilíbrio não trivial são:
• R > 1, onde R é a taxa básica de reprodução.
• ∆≥0→
(R−1)2
4RQ
≥ 1, onde ∆ é resultante da resolução da equação de segundo
3.0
Modelo Matemático da Dengue
43
grau p(A).
Quando essas condições são satisfeitas, tem-se:
A0−
s
"
#
4RQ
(R − 1)
=
C 1− 1−
2R
(R − 1)2
A0+
s
"
#
4RQ
(R − 1)
C 1+ 1−
=
2R
(R − 1)2
Assim o sistema dinâmico tem duas soluções, P1− e P1+ , correspondendo respec2
tivamente a A0− e A0+ . Se (R−1)
= 1, estes pontos colapsam para um ponto de
4RQ
(R−1)
equilíbrio P1 com A0 = 2R C. Obtém-se então, o valor máximo R∗ , garantindo a
existência da solução não trivial positiva, dado por:
"
R∗ = (1 + 2Q) 1 +
s
1
1−
(1 + 2Q)2
#
O ponto de equilíbrio P0 = (0, 0, 0, 0, µαS ) do sistema dinâmico é sempre estável.
2
Quando R > 1 e (R−1)
≥ 1 os pontos de equilíbrio não triviais P1− e P1+ são viáveis.
4RQ
E nesta situação P1− é sempre instável e P1+ é sempre estável.
Thomé (2007) analisou o custo de utilizar a técnica de controle híbrido da dengue, avaliando diferentes estratégias. Em seu estudo, considerou u1 (t) quantidade
de inseticida que será liberada em cada instante de tempo e u2 (t) quantidade de
mosquitos machos estéreis que serão produzidos e liberados, as variáveis de decisão
do problema de controle ótimo.
A variável de controle u1 irá nos informar a quantidade de inseticida que devemos liberar em cada instante do tempo. De maneira análoga, o controle ótimo
u2 mostrará a quantidade de mosquitos machos estéreis que devemos introduzir na
natureza, formando assim, a população de mosquitos machos estéreis S(t) (Thomé,
2007). Sendo assim, inserindo u1 e u2 no sistema dinâmico 3.2, temos o seguinte
3.0
Modelo Matemático da Dengue
44
modelo:
dA
dt
= φ(1 − CA )F − (γ + µA )A
dI
dt
= rγA −
dF
dt
=
dM
dt
= (1 − r)γA − µM M − u1 M
dS
dt
= u2 − µS S − u1 S
βM I
M +S
βM I
M +S
−
βS SI
M +S
− µI I − u 1 I
− µF F − u 1 F
(3.5)
Este, pode ser elucidado pelo diagrama da Figura 3.1:
Figura 3.1: Diagrama da dinâmica populacional da dengue com controle químico e genético.
FONTE: Modificada de Barsante, 2012.
Pode-se observar que u1 não atua na fase aquática A(t), pois o inseticida é
utilizado nos mosquitos adultos, no entanto, ele esta presente nas demais populações,
ou seja, a população de fêmeas imaturas, fêmeas fertilizadas, machos naturais e
3.1
Modelo Matemático da Dengue
45
machos estéreis diminui quando esses mosquitos entram em contato com inseticida.
Nota-se também que a taxa constante α foi substituída pela variável de controle u2 ,
ou seja, a população de mosquitos machos estéreis crescerá conforme a quantidade
de mosquitos produzidos em laboratório e liberados no meio ambiente.
O sistema 4.1 será resolvido em nosso trabalho por meio da função ode45 do
programa MATLAB. Este, é baseado no método numérico de Runge-Kutta1 de
ordem (4,5), que fornece aproximações precisas com erros de truncamento da ordem
de (h5 , h6 ) para as equações diferenciais ordinárias do modelo, sujeitas as condições
iniciais. Ainda com o ode45 do Matlab pôde-se descrever a evolução das populações
do modelo dinâmico em uma escala de tempo de 120 dias.
3.1
Modelo de Otimização
A fim de minimizar o custo com utilização de inseticida, produção e liberação de
machos estéreis, bem como a quantidade de fêmeas fertilizadas e maximizar a preservação de mosquitos estéreis, isto é, manter os machos estéreis no meio ambiente, sem
que o inseticida diminua a população dos mesmos, Thomé (2007) adota o seguinte
índice de desempenho ou função objetivo para o problema de otimização:
1
J(u) =
2
Z
T
(c1 u21 + c2 u22 + c3 F 2 − c4 S 2 )dt
0
onde, os ci representam a importância relativa, respectivamente:
c1 do custo com utilização de inseticidas;
c2 das despesas com a produção de mosquitos estéreis;
c3 do custo social, isto é, o número de fêmeas fertilizadas;
c4 do ganho com a preservação de mosquitos estéreis.
Em que u = (u1 , u2 ) é a variável de controle, referente à quantia de inseticida
(u1 ) e à quantidade de machos estéreis (u2 ). A restrição desse modelo é atender ao
sistema de equações diferenciais 4.1.
O autor afirma que foi adotado um custo funcional quadrático por considerar o
índice de desempenho J uma função não-linear quadrática de u∗ (valores ótimos ou
eficientes de u1 e u2 ). Thomé (2007) pretende resolver o problema de otimização por
1
Métodos de Runge-Kutta de ordem n são métodos numéricos para resolver equações diferenciais
ordinárias (EDO). Eles encontram soluções aproximadas de problemas de valor inicial, obtidas pelo
truncamento da série de Taylor de cada função. Como o nome indica há métodos de Runge-Kutta
de várias ordens. A ordem de um método é n conforme o desenvolvimento de Taylor com n + 1
termos (Burden e Faires, c2003).
3.1
Modelo Matemático da Dengue
46
técnicas de controle ótimo, especificamente pelo Princípio Máximo de Pontryagin,
facilitando as resoluções. As variáveis u1 , u2 , F e S foram elevadas ao quadrado, a
fim de serem penalizadas. Dessa forma, os efeitos de grandes variações são ampliados
e realça as contribuições de pequenas variações. Essas variáveis foram multiplicadas
por uma constante ci , relacionada ao custo econômico no controle da dengue, associado a cada variável que acompanha. Os valores dessa constante são estipulados
pelo autor.
O autor adotou para o sistema dinâmico o conjunto de parâmetros apresentados
na Tabela 3.1. A unidade dos mesmos, com exceção de r, é em dias−1 . E as
condições iniciais do sistema estão na Tabela 3.2, estes são os pontos de equilíbrio
assintoticamente estáveis, logo qualquer solução inicial do sistema na proximidade
deste ponto convergirá para ele.
φ
0.5
C
13
γ
0.07
r
0.5
β
1
βF
0.7
µA
0.05
µI
0.05
µF
0.05
µM
0.1
µS
0.1
Tabela 3.1: Parâmetros adotados no modelo 4.1.
A(0)
8.3200
I(0)
0.2773
F(0)
5.5467
M(0)
2.9120
S(0)
0
Tabela 3.2: Condições iniciais do sistema.
Thomé (2007) trabalhou com diferentes cenários de custos, ou seja, variou ci ,
e em todos casos percebeu que o uso combinado de inseticida e mosquitos machos
irradiados é vantajoso do que utilizar somente inseticida como controle.
Pelo trabalho de Thomé (2007) deve-se liberar muito inseticida no início do período de controle e inserir os mosquitos machos inférteis durante todo o processo,
entretanto, diminuindo aos poucos, conforme mostra os gráficos da Figura 3.2 resultantes do cenário 1, com as constantes mostradas na Tabela 3.3. Todavia, colocar
essas variações em tempo contínuo é inviável na prática, uma vez que mesmo que
os laboratórios produzam machos estéreis em quantidade elevada, os mesmos devem
ser liberados imediatamente, pois possuem um período de vida curto.
c1
1
c2
10
c3
100
c4
1
Tabela 3.3: Coeficientes adotados no índice de desempenho do cenário 1.
As Figuras 3.3, 3.4 e 3.5 apresentam os resultados do controle ótimo proposto
por Thomé (2007) considerando o cenário 1. Nos gráficos destas figuras, temos o
3.1
Modelo Matemático da Dengue
47
Figura 3.2: Liberação de inseticida e mosquitos machos estéreis. Nestes gráficos obtidos
por Thomé (2007), temos o eixo das abscissas referindo ao tempo em dias, onde t = 120
e, o eixo das ordenadas à quantidade de inseticida e à quantidade de mosquitos estéreis
liberados respectivamente.
eixo das abscissas referindo ao tempo em dias, onde t = 120 e, o eixo das ordenadas
à quantidade de mosquitos nas diferentes fases estudadas. No cenário 1, considera-se
um alto custo social, dez vezes maior que o custo com a produção de machos estéreis,
que por sua vez é dez vezes maior que o custo com a utilização de inseticidas e com
a preservação dos mosquitos.
Figura 3.3: População na fase aquática.
Note que a população de mosquitos na fase aquática diminui drasticamente ao
longo do tempo. O mesmo acontece com a população de fêmeas imaturas e fertilizadas, sendo que a de fêmeas imaturas tem um pico antes de diminuir. A população de
3.1
Modelo Matemático da Dengue
48
Figura 3.4: População de mosquitos fêmeas imaturas e mosquitos fêmeas fertilizadas.
Figura 3.5: População de mosquitos machos naturais e mosquitos machos estéreis.
machos naturais também apresenta um pico e depois diminui. Já a população de machos estéreis aumenta nos primeiros instantes, depois decresce e cresce novamente,
por fim, vai diminuindo gradativamente.
Devido a inviabilidade na prática dos primeiros resultados encontrados pelo autor, o mesmo propõe utilizar o inseticida e a liberação de machos estéreis combinados,
de maneira constante ao longo dos 120 dias. Com isso houve redução da população de mosquitos, no entanto, o índice de desempenho ficou maior e, os mosquitos
estéreis são mortos pelo inseticida usado de forma prolongada. Logo, trabalhou-se
reduzindo o tempo de uso do inseticida.
Thomé (2007) observou que quando a população de mosquitos é grande, deve-se
liberar muito inseticida, e quando a população é menor, é preferível inserir mosquitos
estéreis. O que impulsiona a fazer uma otimização multiobjetivo, que será mostrada
no próximo capítulo.
3.1
Modelo Matemático da Dengue
49
Thomé (2007) resolveu o sistema dinâmico com o pacote bvp4c do Matlab. Este
pacote resolve problemas de equações diferenciais ordinárias com condições de contorno. E para otimizar J(u) usou o método de Newton, abordando o método de
continuação analítica para gerar uma aproximação inicial que garanta a convergência na iteração do método de Newton, já que a convergência desse método depende
de uma aproximação inicial suficientemente próxima da solução desejada. Após isso,
para encontrar os valores de u1 e u2 constantes, ele usa a regra de Simpson para
RT
RT
calcular o valor de 0 u1 (t)dt e 0 u2 (t)dt, onde T = 120 dias.
Com o mesmo objetivo de Thomé (2007), Barsante et al. (2011a) utiliza Algoritmo Genético para minimizar o índice de desempenho J , utilizando as variáveis u1
e u2 constantes no tempo. Em seus resultados, encontra para todos os casos propostos por Thomé (2007), um valor menor de J. Para tal, a variável u2 foi fundamental,
pois apresentou valores mais baixo. Ou seja, na otimização mono-objetivo proposta
por Barsante et al. (2011a) foi priorizada apenas uma variável.
Capítulo 4
Apresentação e Análise dos
Resultados
Neste capítulo, são apresentados os resultados obtidos para o problema de otimização
dos custos para o controle integrado do vetor da dengue.
4.1
Otimização do controle integrado do vetor da
dengue
Procuramos encontrar soluções para o problema de otimização:
1
J(u) =
2
Z
T
(c1 u21 + c2 u22 + c3 F 2 − c4 S 2 )dt
0
Sujeito a:
dA
dt
= φ(1 − CA )F − (γ + µA )A
dI
dt
= rγA −
dF
dt
=
dM
dt
= (1 − r)γA − µM M − u1 M
dS
dt
= u2 − µS S − u1 S
βM I
M +S
βM I
M +S
−
βS SI
M +S
− µI I − u 1 I
− µF F − u 1 F
(4.1)
50
4.1
Apresentação e Análise dos Resultados
51
Assim como Barsante et al. (2011a), por meio do Algoritmo Genético (AG).
Neste trabalho, utilizamos o AG com codificação real das variáveis do problema de
otimização, cruzamento polarizado e restrições de busca, conforme Takahashi et al.
(2003). Para tal, foram consideradas as variáveis de decisão u1 e u2 , constantes no
tempo.
A Tabela 4.1 apresenta os parâmetros adotados na execução do AG.
Parâmetro
Tamanho da População
Número de Gerações
Taxa de Cruzamento
Taxa de Mutação
Valor Atribuído
500
500
0.90
0.05
Tabela 4.1: Parâmetros adotados no AG.
Algoritmos Genéticos utilizam um vetor de variáveis aleatórias para definir a
transição de uma população para a seguinte (Takahashi, 2007a), logo, pertencem
á classe de métodos estocásticos, ou não determinísticos. Os AGs tentam dirigir a
busca para uma região do espaço próxima de um ponto ótimo. O que justifica a necessidade de executar o algoritmo mais de uma vez, já que a cada execução teremos
um vetor diferente de pontos ótimos, por ser um método probabilístico. Com os
diferentes resultados obtidos das n execuções do AG pode-se calcular estatística(s)
de interesse. Neste trabalho realizamos 30 iterações do AG, para resposta final calculamos o mínimo. Os 30 resultados encontrados foram organizados em histogramas
de frequência, que são representações gráficas do número de vezes que cada valor foi
resultante em uma avaliação.
Buscando encontrar uma solução robusta para o problema de otimização, fizemos
diferentes combinações de valores entre o tamanho da população e o número de
gerações. Todavia, o valor máximo igual a 500 para o tamanho da população e para
o número de gerações, foi o que apresentou menor desvio padrão para as variáveis
u1 , u2 e J. Em relação ao número de gerações, quanto maior, melhor, pois a cada
nova geração, esperamos obter uma melhor aproximação da solução do problema.
Porém, muitos indivíduos na população, não configura, necessariamente, em uma
melhor performance do AG.
Já Barsante et al. (2011a) realizou apenas uma execução do AG, adotou o tamanho máximo da população como 1000 e o número de gerações igual a 750. Conforme
cada cenário estudado, foi atribuído um domínio para as variáveis u1 e u2 .
A fim de estudar o índice de desempenho proposto por Thomé (2007), tomamos u∗ gerado pelo AG em cada cenário e, obtivemos os valores de cada termo do
4.1
Apresentação e Análise dos Resultados
52
funcional de custo. Os termos do funcional são:
f1 =
f2 =
f3 =
f4 =
J(u) =
1 X 2
(c1
u1 );
2
1 X 2
(c2
u2 );
2
1 X 2
(c3
F );
2
1 X 2
(c4
S );
2
f1 + f2 + f3 − f4
(4.2)
(4.3)
(4.4)
(4.5)
(4.6)
Com este estudo, pretendemos verificar se há parcelas dominantes na composição
do custo paras as variáveis ótimas encontradas.
Outra alternativa para a não priorização de uma variável no índice de desempenho, é considerar o problema de minimização multiobjetivo do custo social, dos
custos com inseticida e produção de machos inférteis e, maximizar a preservação dos
mosquitos estéreis. Ou seja, trabalhar com mais de uma função objetivo.
Para tal, foram propostas algumas funções e, encontramos as melhores soluções
para as mesmas por meio do algoritmo NSGA-II.
Objetivo 1:
P 2
P 2
1
+
c
u2 )
(c
u
f
(u
,
u
)
=
1
1
2
2
1
1
2
f2 (u1 , u2 ) = 21 (c3
P
F 2 − c4
P
S 2)
Pode-se observar que este objetivo simplesmente descreve a divisão ou “quebra”
do índice de desempenho proposto por Thomé (2007) e trabalhado também
por Barsante et al. (2011b), onde, a primeira função busca minimizar o custo
com inseticida e com produção e liberação de macho estéril e, a segunda visa
minimizar o custo social e maximizar a preservação dos mosquitos machos
inférteis.
Objetivo 2:
P
f
(u
,
u
)
=
u
−
S
1
1
2
1
f2 (u1 , u2 ) = u2 +
P
F
Este objetivo é formado por funções lineares. A função f1 reflete a minimização do controle com inseticida e a maximização da permanência dos machos
estéreis no meio ambiente. Já a função f2 descreve a minimização das despesas
com produção e liberação de machos irradiados e a maximização da quantidade
4.2
Apresentação e Análise dos Resultados
53
de fêmeas fertilizadas, isto é, do custo social. Neste caso, desconsideramos os
custos.
Objetivo 3:
P 2
P 2
1
f1 (u1 , u2 ) = 2 (c1 u1 − c4 S )
f2 (u1 , u2 ) = 21 (c2
P
u22 + c3
P
F 2)
Este conjunto de funções objetivo é um desmembramento alternativo para o
índice de desempenho proposto por Thomé (2007). O mesmo busca minimizar
o controle com inseticida e a maximizar a preservação de mosquitos estéreis
(f1 ) e, ao mesmo tempo, minimizar o custo com mosquitos estéreis e também
o custo social (f2 ).
Objetivo 4:
P 2
P 2
1
f1 (u1 , u2 ) = 2 (c1 u1 + c3 F )
f2 (u1 , u2 ) = 21 (c2
P
u22 − c4
P
S 2)
Por último, temos a função f1 que pretende encontrar o valores mínimos para se
investir em inseticida e para o custo social. E concomitantemente, f2 procura
minimizar o controle com produção de macho estéril e maximizar a permanência destes.
Nos funcionais de custos propostos, consideramos também, as variáveis de decisão: u1 (controle com inseticida) e u2 (controle com mosquitos estéreis) e, os ci
continuam com o mesmo significado: influenciar cada fator no custo do controle da
dengue.
4.2
Resultados da Otimização Mono-objetivo
Nesta seção serão apresentados os resultados após a execução do AG para cada
cenário. As primeiras ponderações dos custos que utilizamos na função objetivo,
também foram propostas por Thomé (2007).
Por meio das variáveis de decisão u1 e u2 obtidos nos casos alternativos mencionados no estudo Thomé (2007) e através dos mínimos de u∗ encontrados pela
otimização mono-objetivo com o AG, calculamos o valor de J(u). Para tal, resolvemos o sistema 4.1 com o ode45, para encontrar o valores de F (fêmeas fertilizadas)
e S (machos estéreis). Foi calculado a média de J com os valores encontrados para
u1 e u2 por Thomé (2007). Dessa forma, pudemos comparar os valores de J.
4.2
Apresentação e Análise dos Resultados
54
Partindo dos mínimos de u∗ encontrados em cada cenário foram feitos os gráficos
de evolução das cinco populações (mosquitos na fase aquática, fêmeas imaturas,
fêmeas fertilizadas, machos naturais e machos estéreis) ao longo de 120 dias. Os
traços contínuos representam os resultados obtidos por Thomé (2007) e os traços
pontilhados caracterizam a evolução das populações a partir das soluções ótimas
gerados pelo Algoritmo Genético. Alguns gráficos estão sem legenda, isto se deve ao
fato de que a evolução da população apresentou diferença mínima entre a evolução
gerada com os valores ótimos do AG e a gerada com os valores de Thomé (2007).
Buscando observar a convergência do método de otimização utilizado, foram
feitos os espaço de variáveis e o histograma de frequência com as soluções ótimas
geradas com as 30 simulações do AG.
4.2.1
Cenários utilizados por Thomé (2007)
CENÁRIO 1: Custo Social Elevado e Produção Cara de Mosquitos Estéreis.
Neste cenário, estudamos o caso em que o custo social é dez vezes maior que as
despesas com a produção de mosquitos estéreis. A Tabela 4.2 apresenta as constantes
dos custos.
c1
1
c2
10
c3
100
c4
1
Tabela 4.2: Coeficientes adotados na função custo do cenário 1.
Foram considerados os limites inferior e superior para u1 iguais a [0 0.1] e para
u2 iguais a [0 0.02]. A Tabela 4.3 mostra os resultados encontrados com a execução
do AG e os obtidos por Thomé (2007).
Thomé (2007)
Mínimo do AG
u1
0.0931
0.0999
u2
0.01560
0.00015
J(u)
42155.4705
25021.7387
Tabela 4.3: Valores ótimos obtidos para as variáveis de decisão u1 e u2 , bem como os
valores da função objetivo J para as constantes do cenário 1.
Pode-se observar que, com o AG, houve menor controle com mosquitos estéreis.
Para o controle com inseticida houve pouca diferença entre o resultado encontrado
pelo AG e Thomé (2007). No trabalho de Barsante et al. (2011a), foi encontrado
valores aproximados ao que obtivemos: u = [0.0991 0.00015] e J(u) = 26384.9560.
4.2
Apresentação e Análise dos Resultados
55
As Figuras 4.1, 4.2 e 4.3 representam a evolução populacional ao longo dos 120
dias.
Fase Aquática
9
THOME
AG
8
Evolução da População
7
6
5
4
3
2
1
0
0
20
40
60
Dias
80
100
120
Figura 4.1: Comparação entre as populações na fase aquática para as constantes do Cenário
1.
O custo social elevado implica em minimizar a quantia de fêmeas fertilizadas,
o que pode ser verificado pela Figura 4.2. Entretanto, houve uma redução melhor
por Thomé (2007) da população de fêmeas fertilizadas. Em consequência, a fase
aquática resultante com os valores ótimos das variáveis u obtidas pelo AG foi maior
do que a do autor. A população de machos estéreis - maior constante de otimização
desses cenário, foi baixa durante os 120 dias com a atribuição dos resultados do AG
e, já com os resultados de Thomé (2007), esta população aumentou e depois ficou
constante. As populações de fêmeas imaturas e de machos naturais diminuíram em
ambos os casos.
O espaço de decisão e o histograma obtido ao rodarmos 30 vezes o AG são
mostrados, respectivamente, nas Figuras 4.4 e 4.5.
Pelo espaço de decisão, aparentemente não se verifica nenhuma correlação entre
as variáveis u1 e u2 . A maioria dos valores de u2 estão entre 0.00014 e 0.0002, isto
é, u2 não chega ao limite máximo 0.02. O mínimo de J encontrado pelo AG situa-se
na área de maior frequência no histograma.
A Tabela 4.4 mostra os resultados das parcelas de J(u), tomando o mínimo
4.2
Apresentação e Análise dos Resultados
56
Fêmeas Imaturas
Fêmeas Fertilizadas
0.35
6
THOME
AG
THOME
0.3
5
0.25
Evolução da População
Evolução da População
4
0.2
0.15
3
2
0.1
1
0.05
0
0
20
40
60
Dias
80
100
0
120
0
20
40
60
Dias
80
100
120
Figura 4.2: Comparação entre as populações de fêmeas imaturas e entre as populações de
fêmeas fertilizadas do Cenário 1.
Machos Naturais
Machos Estéreis
3
0.09
THOME
AG
THOME
0.08
2.5
0.07
0.06
Evolução da População
Evolução da População
2
1.5
1
0.05
0.04
0.03
0.02
0.5
0.01
0
0
20
40
60
Dias
80
100
120
0
0
20
40
60
Dias
80
Figura 4.3: Comparação entre as populações de machos naturais e entre as populações de
machos estéreis do Cenário 1.
encontrado pelo AG.
Analisando as parcelas do índice de desempenho para o u∗ gerado, conforme
apontado na Tabela 4.4 observamos que o termo f3 , referente à minimização das
100
120
4.2
Apresentação e Análise dos Resultados
−4
2
x 10
57
Espaço de decisão para as 30 execuções − Cenário 1
1.8
1.6
1.4
u2
1.2
1
0.8
0.6
0.4
0.2
0.096
0.097
0.098
u1
0.099
0.1
Figura 4.4: Espaço das variáveis obtido por meio das 30 soluções ótimas encontrada pelo
AG com o cenário 1.
Histograma do índice de desempenho − Cenário 1
6
5
Frequência
4
3
2
1
0
2.5
2.55
2.6
2.65
J(u)
2.7
2.75
4
x 10
Figura 4.5: Histograma de frequência dos valores de J(u) após as 30 execuções do AG com
o cenário 1.
fêmeas fertilizadas, sobressai no funcional de custo.
Para este cenário foram feitas diferentes simulações do AG, variando o tamanho
da população e o número de gerações. A Tabela 4.5 indica a média dos 30 valores
resultantes de J(u) para cada variação feita. E as Figuras 4.6, 4.7 e 4.8 representam
4.2
Apresentação e Análise dos Resultados
58
Cenário 1:
c1 = 1; c2 = 10; c3 = 100; c4 = 1
u=
[0.0999 0.00015]
f1 =
f2 =
f3 =
f4 =
J(u) =
0.0050
1.2233e-007
2.5022e+004
4.9630e-005
2.5022e+004
Tabela 4.4: Parcelas do índice de desempenho - cenário 1
os histogramas de frequência do funcional custo J(u) para as diferentes combinações
de tamanho de população e quantidade de gerações.
Cenário 1
Tamanho da População
100
100
500
500
1000
1000
Número de gerações
200
500
200
500
200
500
Média de J(u) Desvio padrão de J(u)
26794,08742
1482,60827
26339,38894
1110,639725
25632,05852
581,5077833
25530,70287
536,5666769
25348,37409
452,7457986
25301,57519
326,4758774
Tabela 4.5: Média e desvio padrão do índice de desempenho J(u) a partir das variações do
tamanho da população e do número de gerações considerando as constantes do cenário 1.
Caso: População=100; Gerações=200
Caso: População=100; Gerações=500
6
8
7
5
6
4
Frequência
Frequência
5
3
4
3
2
2
1
1
0
2.5
2.6
2.7
2.8
J(u)
2.9
3
3.1
4
x 10
0
2.5
2.6
2.7
2.8
J(u)
2.9
3
4
x 10
Figura 4.6: Histogramas de frequência dos valores de J(u) após as 30 execuções do AG
com o cenário 1.
Pode-se notar que aumentando a população e o número de gerações, a média
de J(u) diminui, ou seja, os valores do índice de desempenho vão se concentrando
cada vez mais. O que de fato se verifica no eixo das abscissas dos histogramas,
onde observamos que as variações de J(u) vão reduzindo: 2.5 × 104 a 3.1 × 104 ,
4.2
Apresentação e Análise dos Resultados
59
Caso: População=500; Gerações=200
Caso: População=500; Gerações=500
9
12
8
10
7
8
Frequência
Frequência
6
5
4
3
6
4
2
2
1
0
2.45
2.5
2.55
2.6
2.65
0
2.5
2.7
J(u)
2.52
2.54
2.56
4
x 10
2.58
2.6
J(u)
2.62
2.64
2.66
2.68
4
x 10
Figura 4.7: Histogramas de frequência dos valores de J(u) após as 30 execuções do AG
com o cenário 1.
Caso: População=1000; Gerações=200
Caso: População=1000; Gerações=500
12
9
8
10
7
6
Frequência
Frequência
8
6
4
5
4
3
2
2
1
0
2.48
2.5
2.52
2.54
2.56
2.58
J(u)
2.6
2.62
2.64
2.66
2.68
4
x 10
0
2.48
2.5
2.52
2.54
2.56
J(u)
2.58
2.6
2.62
4
x 10
Figura 4.8: Histogramas de frequência dos valores de J(u) após as 30 execuções do AG
com o cenário 1.
2.5 × 104 a 3 × 104 ,..., 2.48 × 104 a 2.62 × 104 . O desvio padrão indica a dispersão dos
dados dentro da amostra, isto é, o quanto os dados se diferem da média. Neste caso,
percebe-se que com maior população (1000) e o maior número de gerações (500) têmse um menor desvio padrão, ou seja, mais parecidos são valores de J(u). Todavia,
maior também é o tempo de execução do AG para as 30 simulações. Desta forma,
consideramos, para esta e demais simulações com o AG o tamanho da população e
o número de gerações igual a 500.
CENÁRIO 2: Custo Social Barato e Produção Cara de Mosquitos
Estéreis.
No cenário 2 temos o custo com a produção de machos estéreis dez vezes maior
que os demais. A Tabela 4.6 mostra as constantes referente aos custos.
Neste caso, o domínio das variáveis de decisão u1 e u2 foram respectivamente,
[0 0.08] e [0 0.01]. Na Tabela 4.7 temos os resultados obtidos por Thomé (2007) e
4.2
Apresentação e Análise dos Resultados
c1
1
c2
10
c3
1
60
c4
1
Tabela 4.6: Coeficientes adotados na função custo do cenário 2.
pelo Algoritmo Genético.
Thomé (2007)
Mínimo do AG
u1
0.0786
0.0799
u2
0.00550
0.00014
J(u)
429.2792
301.5159
Tabela 4.7: Valores ótimos obtidos para as variáveis de decisão u1 e u2 , bem como os
valores da função objetivo J para as constantes do cenário 2.
Assim como no cenário 1, o índice de desempenho J(u) pelo AG foi menor do
que o de Thomé (2007). Os valores de u1 ficaram aproximados, já o mínimo de u2
gerado pelo AG ficou bem abaixo de Thomé (2007). Barsante et al. (2011a) alcançou
resultados próximos ao mínimo do AG: u = [0.0787 0.00017] e J(u) = 313.7376.
A evolução das populações dos mosquitos na fase aquática e alada são mostradas
nas Figuras 4.9, 4.10 e 4.11.
Fase Aquática
9
THOME
AG
8
Evolução da População
7
6
5
4
3
2
1
0
20
40
60
Dias
80
100
120
Figura 4.9: Comparação entre as populações na fase aquática para as constantes do Cenário
2.
Neste cenário não se propõe eliminar a doença, apenas manter o custo com
inseticida menor do que com produção de mosquitos estéreis (c1 < c2 ). Entretanto,
4.2
Apresentação e Análise dos Resultados
61
Fêmeas Imaturas
Fêmeas Fertilizadas
0.35
6
THOME
AG
THOME
0.3
5
0.25
Evolução da População
Evolução da População
4
0.2
0.15
3
2
0.1
1
0.05
0
0
20
40
60
Dias
80
100
0
120
0
20
40
60
Dias
80
100
120
Figura 4.10: Comparação entre as populações de fêmeas imaturas e entre as populações
de fêmeas fertilizadas do Cenário 2.
Machos Naturais
Machos Estéreis
3
0.035
THOME
AG
THOME
0.03
2.5
0.025
Evolução da População
Evolução da População
2
1.5
0.02
0.015
1
0.01
0.5
0.005
0
0
20
40
60
Dias
80
100
120
0
0
20
40
60
Dias
80
Figura 4.11: Comparação entre as populações de machos naturais e entre as populações
de machos estéreis do Cenário 2.
o comportamento dos gráficos neste caso, não se modifica tanto em relação ao cenário
1. Os resultados foram parecidos ao do Thomé (2007) nas populações estudadas,
exceto na população de machos estéreis - população com maior custo - que chegou
100
120
4.2
Apresentação e Análise dos Resultados
62
a reduzir muito mais.
As Figuras 4.12 e 4.13 apontam respectivamente, o espaço de decisão gerado com
as 30 execuções do AG e o histograma de frequência obtido com os 30 diferentes
valores de J(u) encontrados pelo AG.
−4
2
Espaço de decisão para as 30 execuções Cenário 2
x 10
1.9
1.8
1.7
u2
1.6
1.5
1.4
1.3
1.2
1.1
0.076
0.077
0.078
u1
0.079
0.08
Figura 4.12: Espaço das variáveis obtido por meio das 30 soluções ótimas encontradas pelo
AG com o cenário 2.
Neste caso, também não se observa correlação entre as variáveis no espaço de
decisão. O controle com produção de machos inférteis, também ficou muito abaixo
do limite máximo proposto: u2 = 0.01. O mínimo do AG também se encontra na
área de maior frequência.
A partir do mínimo das 30 execuções, gerado pelo AG, temos na Tabela 4.3 os
resultados referentes a cada parcela da função objetivo.
Cenário 2:
c1 = 1; c2 = 10; c3 = 1; c4 = 1
u=
[0.0799 0.00014]
f1 =
f2 =
f3 =
f4 =
J(u) =
0.0032
1.0847e-007
301.5128
5.2750e-005
301.5159
Tabela 4.8: Parcelas do índice de desempenho - cenário 2
Semelhante ao cenário 1, o termo f3 também é preponderante sobre J(u).
4.2
Apresentação e Análise dos Resultados
63
Histograma do índice de desempenho − Cenário 2
14
12
Frequência
10
8
6
4
2
0
300
305
310
315
J(u)
320
325
330
Figura 4.13: Histograma de frequência dos valores de J(u) após as 30 execuções do AG
com o cenário 2.
CENÁRIO 3: Custo Social Barato e Produção Barata de Mosquitos
Estéreis.
Como mostra a Tabela 4.9, todos os custos são iguais neste cenário. Tanto o custo
social quanto a produção de mosquitos estéreis é barato e, o preço com inseticida e
com preservação de macho estéril é equivalente.
c1
1
c2
1
c3
1
c4
1
Tabela 4.9: Coeficientes adotados na função custo do cenário 3.
Considerando o domínio de u1 = [0 0.07] e u2 = [0 0.05], temos na Tabela 4.10,
os resultados de Thomé (2007) e do Algoritmo Genético utilizado neste trabalho.
Thomé (2007)
Mínimo do AG
u1
0.0602
0.0697
u2
0.04410
0.00014
J(u)
547.1557
342.5240
Tabela 4.10: Valores ótimos obtidos para as variáveis de decisão u1 e u2 , bem como os
valores da função objetivo J para as constantes do cenário 3.
A diminuição de c2 , em relação aos cenários anteriores, implica em acrescentar
machos estéreis. Logo, houve uma pequena diminuição do controle com inseticida
4.2
Apresentação e Análise dos Resultados
64
(u1 ), comparando com os cenários 1 e 2, como aponta a Tabela 4.10. Novamente,
o índice de desempenho gerado pelo AG foi menor que o de Thomé (2007). O
controle com inseticida ficou um pouco maior no nosso estudo e, assim como nos
demais cenários, o controle com a produção de machos estéreis ficou bruscamente
abaixo do atingido pelo autor. Os resultados adquiridos por Barsante et al. (2011a):
u = [0.0694 0.00016] e J(u) = 350.1990 se enquadram aos encontrados no nosso
trabalho.
As Figuras 4.14, 4.15 e 4.16, indicam a evolução populacional deste cenário.
Fase Aquática
9
THOME
AG
8
Evolução da População
7
6
5
4
3
2
1
0
20
40
60
Dias
80
100
120
Figura 4.14: Comparação entre as populações na fase aquática para as constantes do
Cenário 3.
O número de ovos na fase aquática e de fêmeas fertilizadas ficou maior pelos
resultados adquiridos em AG, do que os de Thomé (2007). O que pode ser justificável
com a população de machos estéril se encontrar praticamente nula com o AG. Ainda
assim, pode-se dizer que houve o controle da dengue, pois o índice de desempenho
resultante do AG é menor do que o alcançado por Thomé (2007). Os resultados e a
evolução das populações sugerem que com o AG, neste cenário, foi utilizado apenas
o inseticida.
O espaço de decisão e o histograma são apresentados nas Figuras 4.17 e 4.18,
respectivamente.
Aparentemente, as variáveis de controle continuam sem correlação. Os pontos
referentes à variável u2 permanecem longe do limite superior 0.05. Neste cenário,
4.2
Apresentação e Análise dos Resultados
65
Fêmeas Imaturas
Fêmeas Fertilizadas
0.3
6
THOME
AG
THOME
5
0.25
Evolução da População
Evolução da População
4
0.2
0.15
3
2
0.1
1
0.05
0
20
40
60
Dias
80
100
0
120
0
20
40
60
Dias
80
100
120
Figura 4.15: Comparação entre as populações de fêmeas imaturas e entre as populações
de fêmeas fertilizadas do Cenário 3.
Machos Naturais
Machos Estéreis
3
0.35
THOME
AG
THOME
0.3
2.5
0.25
Evolução da População
Evolução da População
2
1.5
0.2
0.15
1
0.1
0.5
0.05
0
0
20
40
60
Dias
80
100
120
0
0
20
40
60
Dias
80
Figura 4.16: Comparação entre as populações de machos naturais e entre as populações
de machos estéreis do Cenário 3.
o mínimo de J(u) = 342.5240 não se encontra na área de maior frequência (355 a
360).
Na Tabela 4.4 temos os valores de cada parcela de J(u).
100
120
4.2
Apresentação e Análise dos Resultados
−4
x 10
66
Espaço de decisão para as 30 execuções − Cenário 3
u2
2
1
0
0.066
0.067
0.068
u1
0.069
0.07
Figura 4.17: Espaço das variáveis obtido por meio das 30 soluções ótimas encontradas pelo
AG com o cenário 3.
Histograma do índice de desempenho − Cenário 3
6
5
Frequência
4
3
2
1
0
340
345
350
355
360
J(u)
365
370
375
380
Figura 4.18: Histograma de frequência dos valores de J(u) após as 30 execuções do AG
com o cenário 3.
Neste caso, quem prepondera no funcional de custo também é a minimização de
fêmeas fertilizadas, como mostra a Tabela 4.11.
CENÁRIO 4: Elevado Custo com Inseticidas.
4.2
Apresentação e Análise dos Resultados
67
Cenário 3:
c1 = 1; c2 = 1; c3 = 1; c4 = 1
u=
[0.0697 0.00014]
f1 =
f2 =
f3 =
f4 =
J(u) =
0.0024
1.0187e-008
342.5216
5.4170e-005
342.5240
Tabela 4.11: Parcelas do índice de desempenho - cenário 3
No cenário 4, como mostra a Tabela 4.12, temos um aumento no custo com
inseticida e os demais custos continuam barato, tentando assim, reduzir o uso de
inseticida e, consequentemente, aumentar o número de machos estéreis. O mesmo
pode ser comprovado na Tabela 4.13, onde temos os resultados obtidos por Thomé
(2007) e pelo AG. O domínio das variáveis de decisão foram u1 ∈ [0 0.04] e u2 ∈
[0 0.08].
c1
3
c2
1
c3
1
c4
1
Tabela 4.12: Coeficientes adotados na função custo do cenário 4.
Thomé (2007)
Mínimo do AG
u1
0.0323
0.0397
u2
0.07380
0.00014
J(u)
725.0563
614.6092
Tabela 4.13: Valores ótimos obtidos para as variáveis de decisão u1 e u2 , bem como os
valores da função objetivo J para as constantes do cenário 4.
Pode-se notar que o resultado obtido pelo AG, não variou muito em relação ao
controle com machos estéreis, comparando aos demais cenários. Assim como nos
demais casos, o AG obteve menor valor para o índice de desempenho do que Thomé
(2007). O controle com inseticida ficou aproximado. Barsante et al. (2011a) encontrou J(u) = 607.9772 ainda menor do que no nosso estudo, com u = [0.0399 0.00013]
aproximado a nossa solução ótima.
Nas Figuras 4.19, 4.20 e 4.21 temos a evolução populacional na fase aquática e
na fase adulta.
4.2
Apresentação e Análise dos Resultados
68
Fase Aquática
9
THOME
AG
8
Evolução da População
7
6
5
4
3
2
1
0
20
40
60
Dias
80
100
120
Figura 4.19: Comparação entre as populações na fase aquática para as constantes do
Cenário 4.
Fêmeas Imaturas
Fêmeas Fertilizadas
0.28
6
THOME
AG
THOME
0.26
5
0.24
Evolução da População
Evolução da População
4
0.22
0.2
3
2
0.18
1
0.16
0
20
40
60
Dias
80
100
120
0
0
20
40
60
Dias
80
Figura 4.20: Comparação entre as populações de fêmeas imaturas e entre as populações
de fêmeas fertilizadas do Cenário 4.
Do mesmo modo que ocorreu no cenário 3, o número de ovos na fase aquática e
100
120
4.2
Apresentação e Análise dos Resultados
69
Machos Naturais
Machos Estéreis
3
0.7
THOME
AG
THOME
2.8
0.6
2.6
0.5
Evolução da População
Evolução da População
2.4
2.2
2
1.8
1.6
0.4
0.3
0.2
1.4
0.1
1.2
1
0
20
40
60
Dias
80
100
120
0
0
20
40
60
Dias
80
Figura 4.21: Comparação entre as populações de machos naturais e entre as populações
de machos estéreis do Cenário 4.
o número de fêmeas fertilizadas gerados com o AG foram maiores que os de Thomé
(2007). E a população de machos estéril praticamente foi extinta da dinâmica estudada.
Nas Figuras 4.22 e 4.23 temos o espaço de variáveis e o histograma obtidos com
as 30 execuções do AG.
Pelo espaço de decisão, verificamos que a maioria dos pontos alcançam o limite
superior de u2 , e situam entre 0.0396 e 0.04 de u1 . Pela histograma, verifica-se, que
neste caso, as respostas de J(u) situam-se entre 635 e 640 - área de maior frequência.
Todavia, o mínimo gerado pelo AG, 614.6092, não se encontra nessa área.
A Tabela 4.5 apresenta as parcelas de J(u) a partir do mínimo gerado pelo AG.
Cenário 4:
c1 = 3; c2 = 1; c3 = 1; c4 = 1
u=
[0.0397 0.00014]
f1 =
f2 =
f3 =
f4 =
J(u) =
0.0024
9.9464e-009
614.6069
7.5353e-005
614.6092
Tabela 4.14: Parcelas do índice de desempenho - cenário 4
Neste cenário, o fator preponderante no funcional custo também é f3 .
100
120
4.2
Apresentação e Análise dos Resultados
70
Espaço de decisão para as 30 execuções − Cenário 4
0.08
0.07
0.06
u2
0.05
0.04
0.03
0.02
0.01
0
0.039
0.0392
0.0394
0.0396
u1
0.0398
0.04
0.0402
Figura 4.22: Espaço das variáveis obtido por meio das 30 soluções ótimas encontradas pelo
AG com o cenário 4.
Histograma do índice de desempenho − Cenário 4
16
14
12
Frequência
10
8
6
4
2
0
610
615
620
625
630
635
640
645
J(u)
Figura 4.23: Histograma de frequência dos valores de J(u) após as 30 execuções do AG
com o cenário 4.
Comparativo dos resultados obtidos pelo AG nos quatro cenários
Agora, vamos apresentar uma comparação entre os resultados encontrados pelo
AG nos quatro cenários estudados. Para tal, consideramos os mesmos mínimos de
4.2
Apresentação e Análise dos Resultados
71
u1 e u2 gerados das 30 execuções feitas pelo Algoritmo Genético e, apresentados
anteriormente.
Os valores de u∗ para cada cenário estão mostrados na Tabela 4.15. As Figuras
4.24, 4.25, 4.26, 4.27 e 4.28 apresentam, respectivamente, os gráficos comparando o
número de mosquitos na fase aquática, a população de fêmeas imaturas, de fêmeas
fertilizadas, de machos naturais e machos estéreis ao longo dos 120 dias.
Cenário
Cenário
Cenário
Cenário
1
2
3
4
(c1
(c1
(c1
(c1
= 1; c2
= 1; c2
= 1; c2
= 3; c2
= 10; c3 = 100; c4 = 1)
= 10; c3 = 1; c4 = 1)
= 1; c3 = 1; c4 = 1)
= 1; c3 = 1; c4 = 1)
u1
u2
0.0999
0.0799
0.0697
0.0397
0.00015
0.00014
0.00014
0.00014
Tabela 4.15: Menores valores ótimos das 30 execuções realizadas pelo AG.
População na Fase Aquática
9
CENÁRIO 1
CENÁRIO 2
CENÁRIO 3
CENÁRIO 4
8
Evolução da População
7
6
5
4
3
2
1
0
0
20
40
60
Dias
80
100
120
Figura 4.24: Comparativo da evolução populacional na fase aquática nos quatros cenários.
População de Fêmeas Imaturas
0.35
CENÁRIO 1
CENÁRIO 2
CENÁRIO 3
CENÁRIO 4
Evolução da População
0.3
0.25
0.2
0.15
0.1
0.05
0
0
20
40
60
Dias
80
100
Figura 4.25: Comparativo da evolução populacional das fêmeas imaturas nos quatros cenários.
120
4.2
Apresentação e Análise dos Resultados
72
População de Fêmeas Fertilizadas
6
CENÁRIO 1
CENÁRIO 2
CENÁRIO 3
CENÁRIO 4
Evolução da População
5
4
3
2
1
0
0
20
40
60
Dias
80
100
120
Figura 4.26: Comparativo da evolução populacional das fêmeas fertilizadas nos quatros
cenários.
População de Machos Naturais
3
CENÁRIO 1
CENÁRIO 2
CENÁRIO 3
CENÁRIO 4
Evolução da População
2.5
2
1.5
1
0.5
0
0
20
40
60
Dias
80
100
120
Figura 4.27: Comparativo da evolução populacional dos machos naturais nos quatros cenários.
−3
1.2
População de Machos Estéreis
x 10
Evolução da População
1
0.8
0.6
CENÁRIO 1
CENÁRIO 2
CENÁRIO 3
CENÁRIO 4
0.4
0.2
0
0
20
40
60
Dias
80
100
Figura 4.28: Comparativo da evolução populacional dos machos estéreis nos quatros cenários.
Como visto na Tabela 4.15, o controle com inseticida foi decrescente em relação
aos cenários e, o controle com mosquito estéril ficou aproximado em todos os casos,
120
4.2
Apresentação e Análise dos Resultados
73
para os valores ótimos de J(u), ao rodarmos o AG. Comparando a evolução das
populações para cada cenário, podemos notar pelos gráficos 4.24, 4.25, 4.26, 4.27
e 4.28 que conforme u1 diminui, a população dos mosquitos aumenta tanto na fase
aquática quanto na fase alada ao longo dos 120 dias. E a quantia de mosquitos
irradiados também aumenta. Ou seja, o uso de inseticida influencia bastante no
controle da dengue, entretanto o controle com mosquito estéril foi baixo e semelhante
em todos os casos, dificultando a avaliação do efeito do mesmo, sob a população de
mosquitos Aedes aegypti.
Pode-se observar que foi obtida uma solução ótima do índice de desempenho
J(u), em todos os quatro cenários, quando comparados com os obtidos por Thomé
(2007). A minimização da variável u2 teve importância direta na diminuição do
J(u) encontrado no AG, refletindo assim em um menor custo de tratamento desta
doença para os gestores públicos. No entanto, foram reduzidos os benefícios para a
sociedade, pois houve um aumento na população de fêmeas fertilizadas com machos
naturais e, consequentemente, em um número maior de ovos na fase aquática, o
que nos leva a crer que deve-se investir um pouco mais na produção de mosquitos
estéreis.
Avaliando apenas os espaços de decisão dos cenários estudados, verificamos a
dificuldade do decisor para escolher uma solução final, visto que nenhum dos espaços
apresentaram alguma correlação. A partir dos histogramas geradas, observamos
que no cenário 4 houve melhor convergência do algoritmo, pois não houve muitas
variações de J(u). Pela análise dos fatores do índice de desempenho J(u), podemos
dizer, que o mesmo está direcionado à minimização do custo social, ou seja, das
fêmeas fertilizadas em todos os casos estudados.
4.2.2
Estudo de outras possibilidades
Analisando o ponto de vista da otimização utilizada, pode-se afirmar que, como o
Algoritmo Genético visa encontrar o menor valor de J(u), percebe-se que a otimização utilizada está correta, pois nos quatro casos estudados, houve um menor valor
do funcional custo. No entanto, uma única variável está sobressaindo: u1 . Tentando solucionar o problema, foram feitas diversas simulações variando os limites de
intervalo das variáveis de decisão e, foram propostos outros cenários de custos.
Variações do domínio de u
Conforme visto anteriormente, pelos gráficos das Figuras 4.4, 4.12,4.17 e 4.22
u1 atinge seu limite máximo nos quatros casos estudados(0.01, 0.08, 0.07 e 0.04) e,
u2 fica muito próximo de 0 (com exceção no cenário 4 que chega ao limite máximo
4.2
Apresentação e Análise dos Resultados
74
u2 = 0.08) o que explica o fato desta variável sobressair na minimização do índice
de desempenho.
Dessa forma, foram feitos outros testes variando os limites das variáveis de decisão e, observamos que o valor de u1 refere-se à taxa - variando entre 0 e 1, e u2 à
quantidade de mosquitos estéreis produzidos, neste trabalho, consideramos a quantia
entre 0 e 10. Consideramos então, o seguinte domínio para as variáveis estudadas:
u1 ∈ [0 1] e u2 ∈ [0 10] e construímos os espaços de decisão para os mesmos cenários
estudados até o momento, como é mostrado nas Figuras 4.29 e 4.30.
Espaço de decisão − cenário 1
Espaço de decisão − cenário 2
10.002
10.002
10
10
9.998
9.998
9.996
9.996
9.994
u2
u2
9.994
9.992
9.992
9.99
9.99
9.988
9.988
9.986
9.986
9.984
9.982
0
1
u1
9.984
2
0
0.2
0.4
0.6
0.8
1
u1
−4
x 10
1.2
1.4
−4
x 10
Figura 4.29: Espaços das variáveis obtidos por meio das 30 soluções ótimas encontrada
pelo AG para os cenários 1 e 2.
Espaço de decisão − cenário 3
Espaço de decisão − cenário 4
10.002
10
10
9.998
9.998
9.996
9.996
9.994
u2
u2
9.994
9.992
9.992
9.99
9.99
9.988
9.988
9.986
9.984
0
1
u1
2
−4
x 10
9.986
0
0.5
1
u1
1.5
−4
x 10
Figura 4.30: Espaços das variáveis obtidos por meio das 30 soluções ótimas encontrada
pelo AG para os cenários 3 e 4.
Pelos gráficos 4.29 e 4.30, resultantes de 50 execuções do AG, percebe-se que os
valores de u1 são aproximados de zero e que, u2 alcança o limite máximo, podendo
ser aumentado, caso o seu intervalo seja expandido.
Sendo assim, pode-se observar que substituindo os intervalos de u1 e u2 , há uma
inversão da variável que atinge o limite máximo e a que fica próxima de zero. Presume que isto ocorra devido u1 representar o percentual de inseticida e u2 referenciar
4.2
Apresentação e Análise dos Resultados
75
a quantia de mosquitos estéreis que deverão ser produzidos e liberados na natureza.
Esse análise nos motiva ainda mais fazermos a otimização multiobjetivo, uma vez
que variando as constantes apenas conseguimos minimizar em relação a uma variável
ou em relação à outra e, não à ambas.
Cenários alternativos
A fim de otimizar J(u), sem priorizar o controle com inseticida ou com produção
e liberação de machos estéreis, buscamos criar outros cenários.
CENÁRIO 5: Custo Social e Produção de Mosquitos Estéreis Elevados.
Neste cenário aumentamos o custo social, ou seja, o número de fêmeas fertilizadas
e o custo com a produção de mosquitos estéreis.
Na Tabela 4.16 estão os custos relativos ao novo cenário proposto. Mantivemos
o custo com inseticida (c1 ) e o benefício com a preservação de mosquitos estéreis (c4 )
muito barato e elevamos os gastos com produção de machos estéreis (c2 ) e o custo
social (c3 ). Foram feitas 50 execuções do AG utilizando este cenário e obtivemos o
espaço de variáveis exposto na Figura 4.31. Neste caso, utilizamos o domínio de u1
igual a [0 1] e u2 igual a [0 10].
c1
1
c2
1000
c3
1000
c4
1
Tabela 4.16: Coeficientes adotados na função custo do cenário 5.
−3
1
Espaço de decisão − cenário 5
x 10
0.9
0.8
0.7
u2
0.6
0.5
0.4
0.3
0.2
0.1
0
0.75
0.8
0.85
0.9
0.95
1
u1
Figura 4.31: Espaço de variáveis após 50 execuções do AG para as constantes do cenário5.
As Figuras 4.32, 4.33 e 4.34 apresentam a evolução das populações na fase
aquática e alada, a partir do menor valor de u obtido após as 50 execuções :
4.2
Apresentação e Análise dos Resultados
76
u = [9.9999e − 0019.6421e − 004].
Fase Aquática
9
AG
8
Evolução da População
7
6
5
4
3
2
1
0
0
20
40
60
Dias
80
100
120
Figura 4.32: População na fase aquática - Cenário 5.
Fêmeas Imaturas
Fêmeas Fertilizadas
0.3
6
AG
0.25
5
0.2
4
Evolução da População
Evolução da População
AG
0.15
0.1
3
2
0.05
1
0
0
−0.05
0
20
40
60
Dias
80
100
120
−1
0
20
40
60
Dias
80
Figura 4.33: População de fêmeas imaturas e fertilizadas - Cenário 5.
A Tabela 4.17 mostra as parcelas de J(u) a partir da solução ótima gerada pelo
AG.
Neste cenário, com o mínimo gerado pelo AG também temos, como nos outros
casos, u2 próximo de zero. Observando o espaço das variáveis, percebemos que u1
chegou ao limite máximo, isto é, o controle com inseticida ficou alto e, o controle
como mosquitos estéreis (u2 ) apresentou valores baixos. Ou seja, neste cenário,
utiliza-se mais inseticida e menos mosquitos estéreis. Ainda assim, as populações de
100
120
4.2
Apresentação e Análise dos Resultados
77
−3
Machos Naturais
3
1
Pop. Machos Estéreis
x 10
AG
AG
0.9
2.5
0.8
0.7
Evolução da População
Evolução da População
2
1.5
0.6
0.5
0.4
1
0.3
0.2
0.5
0.1
0
0
20
40
60
Dias
80
100
120
0
0
20
40
60
Dias
80
Figura 4.34: População de machos naturais e estéreis - Cenário 5.
Cenário 5:
c1 = 1; c2 = 1000; c3 = 1000; c4 = 1
u=
[ 9.9999e-001 9.6421e-004]
f1 =
f2 =
f3 =
f4 =
J(u) =
4.9999e-001
4.6485e-004
1.0373e+005
1.1038e-004
1.0373e+005
Tabela 4.17: Parcelas do índice de desempenho - cenário 5
mosquitos na fase aquática, das fêmeas imaturas e fertilizadas e dos machos naturais
acabaram, conforme mostra os gráficos das Figuras 4.32, 4.33 e 4.34. E a população
de mosquitos estéreis, obviamente, ficou baixa.
Neste cenário, o fator que sobressai na função objetivo também é o f3 , relacionado
à diminuição do custo social, como mostra a Tabela 4.17.
CENÁRIO 6: Produção Cara de Mosquitos Estéreis (S), Custo Social(F) e Custo de Preservação de Mosquitos Estéreis Elevados.
Ainda, tentando encontrar valores maiores para o controle com macho estéril,
sugerimos outro cenário, que, está apresentado na Tabela 4.18, onde consideramos
o custo social(c3 ) e a preservação de machos estéreis elevados(c4 ), a produção de
mosquitos inférteis (c2 ) cara e, o gasto com inseticida muito barato (c1 ). Utilizamos
100
120
4.2
Apresentação e Análise dos Resultados
78
os mesmos limites usados no cenário 5 para as variáveis de decisão u1 ∈ [0 1] e
u2 ∈ [0 10].
c1
1
c2
10
c3
100
c4
100
Tabela 4.18: Coeficientes adotados na função custo do cenário 6.
Para este cenário, temos o seguinte espaço de decisão, obtidos com as 50 execuções do AG:
Espaço de decisão − cenário 6
10.002
10
9.998
u2
9.996
9.994
9.992
9.99
9.988
0
0.2
0.4
0.6
0.8
u1
1
1.2
1.4
1.6
−4
x 10
Figura 4.35: Espaço de variáveis após 50 execuções do AG para as constantes do cenário
6.
A evolução populacional dos mosquitos é mostrada nas Figuras 4.36, 4.37 e 4.38.
Fase Aquática
9
AG
8
Evolução da População
7
6
5
4
3
2
1
0
0
20
40
60
Dias
80
100
120
Figura 4.36: População na fase aquática - Cenário 6.
Na Tabela 4.17 temos as parcelas de J(u) obtidas com o menor valor de u das
50 execuções do AG.
4.2
Apresentação e Análise dos Resultados
79
Fêmeas Imaturas
Fêmeas Fertilizadas
0.4
6
AG
AG
0.35
5
0.3
Evolução da População
Evolução da População
4
0.25
0.2
0.15
3
2
0.1
1
0.05
0
0
20
40
60
Dias
80
100
0
120
0
20
40
60
Dias
80
100
120
Figura 4.37: População de fêmeas imaturas e fertilizadas - Cenário 6.
Machos Naturais
Pop. Machos Estéreis
3
100
AG
AG
90
2.5
80
70
Evolução da População
Evolução da População
2
1.5
60
50
40
1
30
20
0.5
10
0
0
20
40
60
Dias
80
100
120
0
0
20
40
60
Dias
80
Figura 4.38: População de machos naturais e estéreis - Cenário 6.
O espaço de decisão 4.35 deste cenário, reflete o máximo controle com produção
de mosquitos irradiados e proporção baixa, quase zero, de controle com inseticida.
A evolução das populações mostradas nos gráficos 4.36, 4.37 e 4.38 sugere a extinção
dos mosquitos na fase aquática e na fase alada, exceto dos mosquitos estéreis. O
100
120
4.3
Apresentação e Análise dos Resultados
80
Cenário 6:
c1 = 1; c2 = 10; c3 = 100; c4 = 100
u=
[ 3.9020e-007 9.9990e+000]
f1 =
f2 =
f3 =
f4 =
J(u) =
7.6128e-014
4.9990e+002
7.6466e+004
5.3111e+007
-5.3034e+007
Tabela 4.19: Parcelas do índice de desempenho - cenário 6
termo que prepondera nesse caso, é f4 , referente á maximização da permanência dos
mosquitos estéreis.
Dessa forma, temos que no cenário 5 prevalece o uso de inseticida. O cenário 6,
configura a priorização do controle com mosquitos estéreis. Entretanto, em ambos
os casos acaba-se com a população de Aedes aegypti natural.
Tratando-se do índice de desempenho, vemos que com estes cenários também há
uma prevalência de um único termo na função.
Podemos observar que, mesmo estudando o domínio da variável u e sugerindo
outros cenários, não obtivemos um balanceamento entre u1 e u2 . E percebemos que
a função objetivo proposta não alcança seu objetivo - minimização do custo com inseticida, do gasto com produção de machos estéreis, do custo social e maximização
da preservação dos mosquitos irradiados, pois apenas um fator tem sido minimidazo ou maximizado. Logo, tentamos tratar esses dois problemas trabalhando com
otimização multiobjetivo.
4.3
Resultados da Otimização Multiobjetivo
Apresentaremos nesta seção o conjunto de soluções eficientes geradas pelo NSGA-II.
Para este, buscamos executar 10 vezes o algoritmo, salvando os conjuntos Pareto
resultantes e os espaços das variáveis, no mesmo gráfico. E por último, rodamos
um algoritmo de dominância do espaço dos objetivos, encontrando os pontos não
dominados. Foram considerados o tamanho da população igual a 500 e o número de
gerações igual a 1000. Fizemos as simulações a partir de três cenários que consideramos mais promissores após os diversos testes.
As melhores respostas para o problema de otimização foram obtidas com o objetivo 4:
4.3
Apresentação e Análise dos Resultados
81
P 2
P 2
1
f1 (u1 , u2 ) = 2 (c1 u1 + c3 F )
f2 (u1 , u2 ) = 21 (c2
P
u22 − c4
P
S 2)
Para todos os casos estudados os limites das variáveis de decisão que adotamos
foi: u1 ∈ [0 1] e u2 ∈ [0 10].
CENÁRIO 1: Custo Social(F) Elevado e Produção Cara de Mosquitos
Estéreis (S).
Os custos relativos a este cenário se encontram na Tabela 4.2. Podemos observar
que a despesa com inseticida é bem mais barata que as despesas com produção de
machos estéril.
Para este cenário, temos os 10 conjuntos Pareto-ótimos gerados pelo NSGA-II
mostrados na Figura 4.39.
f2: Custo com produção e preservação de mosquitos estéreis
5
0
x 10
Conjuntos Pareto−ótimos das 10 execuções do NSGA−II
−1
−2
−3
−4
−5
−6
1
2
3
4
5
6
f1: Custo com inseticida e custo social
7
8
4
x 10
Figura 4.39: Conjunto Pareto-ótimo resultante das 10 execuções do NSGA-II para o objetivo 4 com as constantes do cenário 1.
Em cada execução do NSGA-II temos uma fronteira Pareto semelhante, dificultando a visualização dos conjuntos formados nas 10 execuções. Assim fizemos um
zoom da Figura 4.39, porém, para cada execução atribuímos uma cor. Destacamos
dois pontos na Figura 4.40. Esta última é ampliada, conforme mostra a Figura 4.41.
Como o conjunto Pareto-ótimo de cada execução do NSGA-II gera um gráfico
semelhante para as 10 execuções do algoritmo, podemos dizer que o NSGA-II foi
Apresentação e Análise dos Resultados
f2: Custo com produção e preservação de mosquitos estéreis
4.3
5
x 10
82
Conjuntos Pareto−ótimos das 10 execuções do NSGAII
0
X = 5.348e+004
Y = −8.615e+004
−1
X = 5.557e+004
Y = −1.198e+005
−2
−3
exec1
exec2
exec3
exec4
exec5
exec6
exec7
exec8
exec9
exec10
−4
−5
2
3
4
5
6
7
f1: Custo com inseticida e custo social
8
4
x 10
f2: Custo com produção e preservação de mosquitos estéreis
Figura 4.40: Destaque de dois pontos no conjunto Pareto-ótimo resultante das 10 execuções
do NSGA-II para o objetivo 4 com as constantes do cenário 1.
5
x 10
Conjuntos Pareto−ótimos das 10 execuções do NSGAII
−0.85
−0.9
exec1
exec2
exec3
exec4
exec5
exec6
exec7
exec8
exec9
exec10
X = 5.348e+004
Y = −8.615e+004
−0.95
−1
−1.05
−1.1
−1.15
X = 5.557e+004
Y = −1.198e+005
−1.2
5.25
5.3
5.35
5.4
5.45
5.5
5.55
5.6
f1: Custo com inseticida e custo social
5.65
4
x 10
Figura 4.41: Ampliação mostrando os dois pontos destacados no conjunto Pareto-ótimo
resultante das 10 execuções do NSGA-II para o objetivo 4 com as constantes do cenário 1.
robusto.
A Figura 4.42 representa o espaço de variáveis das 10 execuções do NSGA-II.
Observamos que independente da proporção de inseticida utilizada, sempre haverá muito macho estéril. E também, independente da quantia de macho estéril
investida, haverá muito inseticida ao longo dos 120 dias. Só que o custo com macho
4.3
Apresentação e Análise dos Resultados
83
Espaço de decisão das 10 execuções do NSGA−II
10
u2 − Investimento com mosquitos estéreis
9
8
7
6
5
4
3
2
1
0
0
0.2
0.4
0.6
u1 − Investimento com inseticida
0.8
1
Figura 4.42: Espaço de variáveis resultante das 10 execuções do NSGA-II para objetivo 4
com cenário 1.
estéril neste caso, é muito mais caro que o controle com inseticida.
O gráfico mostrado na Figura 4.43 aponta a dominância de Pareto, ou seja, as
melhores soluções encontradas.
f2: Custo com produção e preservação de mosquitos estéreis
5
0
Dominância dos 10 conjuntos Pareto−ótimos
x 10
−1
−2
−3
−4
−5
−6
1
2
3
4
5
6
f1: Custo com inseticida e custo social
7
8
4
x 10
Figura 4.43: Dominância resultante das 10 execuções do NSGA com objetivo 4 para o
cenário 1.
4.3
Apresentação e Análise dos Resultados
84
Como o algoritmo foi robusto, os pontos não dominados geram uma curva semelhante aos conjunto Pareto-ótimos encontrados nas 10 execuções.
CENÁRIO 5: Custo Social(F) e Produção de Mosquitos Estéreis
Elevados (S).
As constantes dos custos referentes a este cenário, se encontram na Tabela 4.16.
O controle com inseticida é muito barato em relação à produção de machos estéreis.
E o custo social também é alto.
Os 10 conjuntos Pareto-ótimos gerados pelo AG, são mostrados na Figura 4.44.
f2: Custo com produção e preservação de mosquitos estéreis
5
1
x 10
Conjuntos Pareto−ótimos das 10 execuções do NSGA−II
0
−1
−2
−3
−4
−5
1
2
3
4
5
6
f1: Custo com inseticida e custo social
7
8
5
x 10
Figura 4.44: Fronteira Pareto resultante das 10 execuções do NSGA-II para objetivo 4 com
cenário 5.
Podemos observar que, a curva de Pareto gerada pelo NSGA-II ficou similar ao
conjunto Pareto-ótimo formado no cenário 1.
O espaço de decisão é apresentado na Figura 4.45.
Neste cenário, o espaço de decisão formado é diferente do cenário 1. O controle
com inseticida ficou limitado, a maioria dos pontos se situam até 0.4. O degrau
ocorreu entre 0.2 e 0.4 para a variável u1 . Já o controle com mosquitos estéreis
também chegou ao limite máximo.
A dominância de Pareto é mostrada na Figura 4.49.
Mais uma vez, notamos a robustez do algoritmo, pois, as melhores soluções
factíveis das 10 execuções do NSGA-II também formaram uma curva semelhante
aos conjuntos de Pareto gerados.
4.3
Apresentação e Análise dos Resultados
85
Espaço de decisão das 10 execuções do NSGA−II
10
u2 − Investimento com mosquitos estéreis
9
8
7
6
5
4
3
2
1
0
0
0.2
0.4
0.6
u1 − Investimento com inseticida
0.8
1
Figura 4.45: Espaço de variáveis resultante das 10 execuções do NSGA-II para objetivo 4
com cenário 5.
f2: Custo com produção e preservação de mosquitos estéreis
5
1
Dominância dos 10 conjuntos Pareto−ótimos
x 10
0
−1
−2
−3
−4
−5
1
2
3
4
5
6
f1: Custo com inseticida e custo social
7
8
5
x 10
Figura 4.46: Dominância resultante das 10 execuções do NSGA para o objetivo 4 com o
cenário 5.
CENÁRIO 6: Produção Cara de Mosquitos Estéreis (S), Custo Social(F) e Custo de Preservação de Mosquitos Estéreis Elevados.
Este cenário é apresentado na Tabela 4.18. Novamente, o custo com inseticida é
4.3
Apresentação e Análise dos Resultados
86
muito barato. Porém, para este caso o custo com a preservação de machos estéreis
já não é barato.
A Figura 4.47 aponta os 10 conjuntos de soluções eficientes obtidas pelo NSGAII. Na Figura 4.48 temos o espaço de decisão das 10 execuções do NSGA-II. A
f2: Custo com produção e preservação de mosquitos estéreis
7
0
x 10
Conjuntos Pareto−ótimos das 10 execuções do NSGA−II
−1
−2
−3
−4
−5
−6
1
2
3
4
5
6
f1: Custo com inseticida e custo social
7
8
4
x 10
Figura 4.47: Fronteira Pareto-ótima resultante das 10 execuções do NSGA-II para objetivo
4 com o cenário 6.
dominância de Pareto é apresentada na Figura 4.49.
Independente da variação das constantes dos custos, os gráficos 4.47, 4.48 e
4.49 foram todos semelhantes aos gráficos resultantes no cenário 1. Pelos conjuntos
Pareto-ótimos apresentados nas Figuras 4.39, 4.44 e 4.47, observamos que o algoritmo NSGA-II foi robusto para todos os cenários. As curvas de Pareto mostra que
os machos estéreis serão mortos pelo contato com inseticida.
Analisando os espaços de decisão dos casos estudados, notamos que nos cenários
1 e 6, as variáveis u1 e u2 atingiram seus limites máximos, conforme mostra os
gráficos 4.42 e 4.48. Logo, podemos dizer que o cenário 5 apresenta melhor conjunto
de possibilidades para o decisor escolher uma combinação dos custos, pois delimita
ainda mais o controle com inseticida, como mostra o gráfico 4.48 e, com o mesmo
pode-se fazer diferentes combinações para a melhor política de custo no controle da
dengue, investindo-se pouco ou muito com produção mosquitos irradiados. Dessa
forma, os gestores ambientais e de saúde pública, terão oportunidades de saber
o percentual de inseticida a ser utilizado e a quantidade de mosquitos irradiados
que devem ser liberados na natureza. Pelo espaço de variáveis da Figura 4.45,
podemos dizer que deve-se utilizar menos inseticida quando for liberado uma grande
4.3
Apresentação e Análise dos Resultados
87
Espaço de decisão das 10 execuções do NSGA−II
10
u2 − Investimento com mosquitos estéreis
9
8
7
6
5
4
3
2
1
0
0
0.2
0.4
0.6
u1 − Investimento com inseticida
0.8
1
Figura 4.48: Espaço de variáveis resultante das 10 execuções do NSGA-II para objetivo 4
com cenário 6.
f2: Custo com produção e preservação de mosquitos estéreis
7
0
Dominância dos 10 conjuntos Pareto−ótimos
x 10
−1
−2
−3
−4
−5
−6
1
2
3
4
5
6
f1: Custo com inseticida e custo social
7
8
4
x 10
Figura 4.49: Dominância resultante das 10 execuções do NSGA-II para o objetivo 4 com
o cenário 6.
quantidade de mosquitos estéreis. O que de fato é melhor, visto que os mosquitos
irradiados podem morrer com o inseticida. E tendo mais mosquitos inférteis, temos
uma diminuição do número de fêmeas fertilizadas. Para melhor visualização desse
fato, tomamos três pontos no espaço de variáveis, depois obtivemos os valores de f1
4.3
Apresentação e Análise dos Resultados
88
e f2 e por último, simulamos a evolução das populações para cada par de pontos.
A Figura 4.50 destaca os três pontos no espaço de decisão.
Espaço de decisão das 10 execuções do NSGA−II
u2 − Investimento com mosquitos estéreis
10
X = 0.1147
Y = 9.958
9
8
7
6
X = 0.1854
Y = 4.627
5
4
3
2
X = 0.262
Y = 0.3878
1
0
0
0.2
0.4
0.6
u1 − Investimento com inseticida
0.8
1
Figura 4.50: Destaque de três ponto no espaço de variáveis resultante das 10 execuções do
NSGA-II para objetivo 4 com cenário 5.
Na Tabela 4.20 temos os resultados de f1 e f2 do objetivo 4, considerando o vetor
u marcados na Figura 4.50.
A
B
C
u¯1
0.1147
0.1854
0.262
u¯2
9.958
4.627
0.3878
f¯1
5.7066e+005
5.0427e+005
4.0520e+005
f¯2
-9.2418e+004
-7.8382e+003
-1.8336e+001
Tabela 4.20: Valores obtidos com o NSGA-II para o cenário 5 com três pontos escolhidos
dentre as soluções do conjunto Pareto-ótimo.
Pode-se verificar que f1 é maior nos três casos, ou seja, o custo social prevalece
alto (lembrando que c3 = 1000) e, o custo com a preservação de macho estéril
é maior que as despesas com a produção dos mesmos, ainda que c2 = 1000 seja
maior que c4 = 1. Isto acontece independente da variação percentual do controle
com inseticida e da quantidade de machos inférteis produzidos. Além disso, nota-se
que quando se utiliza muito macho estéril a manutenção dos mesmos é muito mais
elevada, entretanto, as despesas com fêmeas fertilizadas são aproximadas, e também
alta.
As Figuras 4.51, 4.52 e 4.53, mostram a evolução das populações para o controle
com inseticida para os valores de u correspondente aos pontos A, B e C.
4.3
Apresentação e Análise dos Resultados
89
Fase Aquática
9
A
B
C
8
7
Evolução da População
6
5
4
3
2
1
0
0
20
40
60
Dias
80
100
120
Figura 4.51: Evolução populacional do Aedes aegypti na fase aquática ao longo dos 120
dias para os pontos A, B e C.
Fêmeas Imaturas
Fêmeas Fertilizadas
0.35
6
A
B
C
A
0.3
5
0.25
Evolução da População
Evolução da População
4
0.2
0.15
3
2
0.1
1
0.05
0
0
20
40
60
Dias
80
100
120
0
0
20
40
60
Dias
80
Figura 4.52: Evolução populacional das fêmeas imaturas e fertilizadas ao longo dos 120
dias para os pontos A, B e C. A evolução das fêmeas imaturas é bem próxima para os três
pontos, resultando assim, em apenas uma curva após a simulação.
Nos três casos estudados podemos notar que a população aquática tende a se
extinguir entre 40 e 60 dias com controle da dengue. As fêmeas imaturas tendem a
morrer por volta de 50 dias de controle. Já as fêmeas fertilizadas, se extinguem antes
dos 40 dias, nos três casos. A mortalidade dos machos naturais ocorre próximo aos
100
120
4.3
Apresentação e Análise dos Resultados
90
Machos Naturais
Machos Estéreis
3
50
A
B
C
A
45
2.5
40
35
Evolução da População
Evolução da População
2
1.5
30
25
20
1
15
10
0.5
5
0
0
20
40
60
Dias
80
100
120
0
0
20
40
60
Dias
80
Figura 4.53: Evolução populacional de machos naturais e estéreis ao longo dos 120 dias
para os pontos A, B e C. A evolução dos machos naturais é semelhante para os três pontos,
resultando assim, em apenas uma curva após a simulação.
50 dias do uso dos mecanismos de doença. Obviamente a população de mosquitos
estéreis aumenta nos três casos, conforme a quantidade de mosquitos irradiados
liberados no meio ambiente. Ao analisarmos minunciosamente todos os gráficos dos
mosquitos naturais, percebemos que no primeiro caso, onde há maior quantidade
de mosquitos machos estéreis, a população de mosquitos naturais na fase aquática
e alada demora um pouco mais para acabar.
Dessa forma, dentre os conjunto de valores de u analisados, a melhor alternativa
para o controle híbrido seria próximo ao controle com inseticida igual a 0.1854 e
controle com macho estéril igual a 4.627, pois utiliza-se pouco inseticida e, uma
quantia média de machos estéreis. E os custos social e com a permanência dos
mosquitos inférteis não serão tão altos.
100
120
Capítulo 5
Conclusões e trabalhos futuros
Nesta dissertação estudou-se um modelo matemático com controle integrado do vetor
da dengue: controle com o uso de inseticida e controle com inserção de mosquito
macho estéril. O objetivo é minimizar os custos destes mecanismos de combate da
doença e também, do número de fêmeas fertilizadas no meio ambiente. Para tal,
utilizamos a priori, o índice de desempenho sugerido por Thomé (2007). Otimizamos
variações desse funcional por meio de Algoritmo Genético, buscando verificar qual
conjunto de variáveis conduz ao menor custo econômico e social, na prática.
Por meio de diversas simulações com o Algoritmo Genético, para diferentes cenários de custos, observamos que a figura de mérito estudada, minimiza o custo
econômico com os meios de controle utilizados e, diminui as populações de mosquitos Aedes aegypti, porém, prioriza o uso com inseticida. Este, na prática, é realmente
mais barato que a produção e liberação de machos inférteis, mas mata os mosquitos irradiados e, também, os mosquitos Aedes aegypti tendem a adquirir resistência
aos mesmos. Buscando avaliar ainda o índice de desempenho J, estudamos outros
limites para as variáveis de decisão e propomos outros cenários. Definimos que a
variável u1 refere-se à proporção ou taxa de inseticida utilizado e, u2 à quantidade
de machos estéreis que serão produzidos. E que na otimização de J, apenas um
termo da função prevalece no caso mono-objetivo.
Sendo assim, sugerimos outra alternativa para poder controlar a dengue, com
esses mesmos mecanismos estudados: trabalhar com mais de uma função objetivo.
Logo, foram propostos diferentes objetivos e realizadas simulações com o NSGA-II.
Dentre os funcionais de custo avaliados, o que melhor apresentou uma visão sobre o
uso de inseticida e de liberação de macho estéril foram: encontrar o menor valor do
custo com inseticida e do custo social; e minimizar o custo da produção de macho
estéril, maximizando a preservação destes mosquitos. E o cenário mais adequado
para tal, foi o cenário 5, onde, o custo com fêmeas fertilizadas e a produção de
mosquitos estéreis são elevados. Para este caso, temos uma melhor delimitação
91
5.1
Conclusões e trabalhos futuros
92
do percentual a ser investido com inseticida. Entretanto, pelos conjuntos Paretoótimos formados, verificamos que com o uso de inseticida e liberação de inseticida
ao mesmo tempo, os mosquitos machos inférteis serão morto, o que sugere que não
se deve liberar ambos simultaneamente.
Em suma, com a otimização multiobjetivo respostas balanceadas, ao contrário da
otimização mono-objetivo, onde variando-se as constantes, minimizava uma variável
ou outra.
Podemos ver que sempre haverá custo econômico, cabe ao gestor público decidir
no que se deve investir mais, privilegiando a saúde pública. Ressaltando que os
mosquitos estéreis é um método menos nocivo ao meio ambiente do que o inseticida.
5.1
Trabalhos futuros
Como sabemos dengue é uma doença sazonal, ou seja, sofre influência do clima. As
epidemias de dengue ocorrem nos períodos de alta pluviosidade e elevada temperatura. Logo, pode-se incorporar ao modelo matemático estudado, a dependência
temporal nos períodos de evolução das populações dos mosquitos com influência da
temperatura e pluviosidade. O que foi feito como projeto de mestrado por Barsante
(2012).
O tempo de desenvolvimento dos mosquitos foi considerado constante nas simulações desta dissertação, no entanto, outra alternativa seria utilizar inseticida e
liberar macho estéril de forma variada no tempo, ou seja, trabalhando com funções degrau, funções descontínuas. Trabalhar com as variáveis discretas no tempo,
conforme Oliveira (2011).
Como vimos, são diversos os mecanismos de controle de dengue, portanto, podese trabalhar também com a adição ou troca de outros métodos de combate da
dengue, como remoção mecânica, emprego de parasitas larvicidas, entre outros.
Somado a essas possibilidades de trabalhos futuros, podemos sugerir novas funções objetivo, utilizando novas variáveis de decisão, obtendo novos problemas de
otimização, seja mono ou multiobjetivo. Podendo resolvê-los com outros algoritmos
evolucionários, como o algoritmo de Evolução Diferencial ou o SPEA-II (Strength
Pareto Evolutionary Algorithm - II).
Referências Bibliográficas
Alexandre, R. F. Abril(2010). Modelagem, simulação da operação e otimização
multiobjetivo aplicada ao problema de despacho de veículos em minas a céu aberto.
Dissertação (mestrado em engenharia elétrica), Universidade Federal de Minas Gerais, Belo Horizonte, MG.
Ávila, S. L. Novembro(2002). Algoritmos genéticos aplicados na otimização de
antenas refletoras. Dissertação (mestrado em engenharia elétrica), Universidade
Federal de Santa Catarina, Florianópolis - SC.
Barreto, M. L. e Teixeira, M. G. (2008). Dengue no brasil: situação epidemiológica
e contribuições para uma agenda de pesquisa. Estudos Avançados, v. 22.
Barros, M. T. L.; Zambon, R. C. e Mendes, L. A. (2009). Otimização: Conceitos
básicos. Aula.
Barsante, L. S. Julho(2012). Dependência entre pluviosidade e população de fêmeas
aedes aegypti grávidas descritas através de um sistema dinâmico não linear. Dissertação (mestrado em modelagem matemática e computacional), Centro Federal de
Educação Tecnológica de Minas Gerais, Belo Horizonte.
Barsante, L. S.; Cardoso, R. T. N. e Acebal, J. L. Setembro(2011)a. Otimizando
custos no combate da dengue através de algoritmos genéticos. X Simpósio Brasileiro
de Automática, Setembro(2011)a.
Barsante, L. S.; Cardoso, R. T. N. e Acebal, J. L. (2011)b. Otimização multiobjetivo no controle de gastos com inseticidas e machos estéreis no combate
da dengue. Ubatuba/SP. XLIII Simpósio Brasileiro de Pesquisa Operacional,
http://www.xliiisbpo.iltc.br/pdf/87927.pdf.
Bortolossi, H. J. (2002). Cálculo diferencial a várias variáveis: uma introdução á
teoria de otimização. Editora PUC-Rio, São Paulo, edições loyola edição.
Braga, I. A. e Valle, D. (2007). Aedes aegypti: histórico do controle no brasil.
Epidemiologia e Serviços de Saúde ;, v. 16, p. 113–118.
93
5
Referências Bibliográficas
94
Brasil,. Casos de dengue no brasil já ultrapassam 700 mil em 2010, Julho(2010)a. URL http://www.brasil.gov.br/noticias/arquivos/2010/7/08/
casos-de-dengue-no-brasil-ja-ultrapassam-700-mil-em-2010.
Brasil, Ministério Da Saúde, (2006). URL http://portal.saude.gov.br/portal/
arquivos/kitdengue/epidemiologia/textos/mapa/epidemiologia.pdf. Acesso
em: Agosto de 2011.
Brasil, Ministério da Saúde Secretaria de Vigilância em Saúde. Diretrizes nacionais para a prevenção e controle de epidemias de dengue. Brasília, (2009).
URL http://www.combatadengue.com.br/_downloads/diretrizes_epidemias_
dengue_11_02_10.pdf.
Brasil, Ministério da Saúde Secretaria de Vigilância em Saúde. O uso racional
de inseticidas no controle do aedes aegypti e sua utilização oportuna em áreas
com transmissão de dengue, Agosto(2010)b. URL http://portal.saude.gov.br/
portal/arquivos/pdf/nt_inseticida_na_dengue_9_9_10.pdf. Nota Técnica no .
109/ 2010 CGPNCD/DEVEP/SVS/MS.
Burden, R. L. e Faires, J. D. (c2003). Análise Numérica. São Paulo.
Cayres, K. Dengue: Epidemia ou endemia?, (2006). URL http://www.jornal.
ufrj.br/jornais/jornal13/jornalUFRJ1311.pdf. Acesso em novembro de 2011.
Câmara, F. P.; Theophilo, R. L. G.; Santos, G. T.dos; Pereira, S. R. F. G.; Camara, D. C. P. e deMATOS, R. R. C. (2007). Estudo retrospectivo (histórico)
da dengue no brasil: características regionais e dinâmicas. Revista da Sociedade
Brasileira de Medicina Tropical, v. 40, p. 192–196.
Cordón, O.; Herrera, F. e Lozano, M. (1997). On the combination of fuzzy logic
and evolutionary computation: a short review and bibliography. Pedrycz, Witold,
p. 33–56. URL http://sci2s.ugr.es/publications/ficheros/CFLEC-SRB.pdf.
COSEMS-BA, Conselho Estadual Dos Secretários Municipais De Saúde Da Bahia.
Mosquito transgênico combaterá a dengue, Julho(2012). URL http://www.
cosemsbahia.com.br/?pagina=noticia&codNoticia=1911. Acesso em: Agosto de
2012.
Deb, Kalyanmoy; Agrawal, Samir; Pratap, Amrit e Meyarivan, T. (2000). A fast elitist non-dominated sorting genetic algorithm for multi-objective optimization: Nsgaii. KanGAL Report No. 200001.
5
Referências Bibliográficas
95
DeJong, K. A. An Analysis of the Behavior of a Class of Genetic Adaptive Systems.
PhD thesis, Univ. of Micchigan, (1975).
Donalísio, M. R. e Glasser, C. M. (2002). Vigilância entomológica e controle de
vetores do dengue. Rev. Bras. Epidemiol., v. 5, n. 3, p. 259–272.
Esteva, L. e Yang, H. M. (2005). Mathematical model to assess the control of aedes
aegypti mosquitoes by the sterile insect technique. Mathematical Biosciences, p.
132–147, (2005).
Esteva, L. e Yang, H. M. (2006). Control of dengue vector by the sterile insect
technique considering logistic recruitment. TEMA Tend. Mat. Apl. Comput., v. 7,
n. 2, p. 259–268.
Goldberg, D. (1989). Genetic algorithms in optimization, search and machine learning. Addison Wesley.
Guimarães, F. G. Aprendizagem e Busca Local em Algoritmos Meméticos para Otimização Não Linear. Tese (doutorado em engenharia elétrica), Universidade Federal
de Minas Gerais, Belo Horizonte - MG, (2005).
Guzman, M. G.; Halstead, S. B.; Artsob, H.; Buchy, P.; Farrary, J.; Gubler, D. J.;
Hunsperger, E.; Kroeger, A.; Margolis, H. S.; Martinez, E.; andJ.L. Pelegrino, M.
B. Nathan; Simmons, C.; Yoksan, S. e Peeling, R. W. Dezembro(2010). Dengue: a
continuing global threat. Nat Rev Microbiol, v. 8, n. 12, p. S7–S16.
Guzmán, M. G. e Kouri, G. (2002). Dengue: Uma atualização. Rio Estudos, v. 47.
Heinen, M. R. e Osório, F. S. 30 de junho a 06 de julho de 2007(2007). Controle
inteligente do caminhar de robôs móveis utilizando algoritmos genéticos e redes
neurais artificiais. VI Encontro Nacional de Inteligência Artificial, p. 952–961, Rio
de Janeiro.
Holland, J. H. (1975). Adaptation in natural and artificial systems. The University
of Michigan Press.
Júnior, B. R. Pereira. Agostto(2009). Alocação otimizada de bancos de capacitores
em sistemas de distribuição de energia elétrica através de metaheurísticas multiobjetivo. Dissertação (mestrado em engenharia elétrica), Universidade Estadual Paulista
“Júlio de Mesquita Filho”, Ilha Solteira, SP.
Kimura, H.; Moori, R. G. e Asakura, O. K. N. Análise da difusão tecnológica usando algoritmos genéticos, jul./set.(2005). URL http://www.uftm.edu.br/
upload/seletivo/ANALISE_DA_DIFUSAO_TECNOLOGICA%5B1%5D.pdf.
5
Referências Bibliográficas
96
Lacerda, A. J.; Texeira, W. W.; Vieira, J. P. e Nepomuceno, E. G. (2010). Alocação
de agentes para controle de epidemias utilizando algoritmo genético. Biomatemática,
, n. ISSN 1679-365X, p. 79–92. Uma Publicação do Grupo de Biomatemática IMECC
- UNICAMP.
Marrelli, M. T. jul./dez(2008). Controle genético de mosquitos vetores. Biológico,
70(2):São Paulo.
Oliveira, S. C. Outubro(2011). Otimização multiobjetivo no controle de epidemias
via modelos sir e mbi. Dissertação (mestrado em modelagem matemática e computacional), Centro Federal de Educação Tecnológica de Minas Gerais, Belo Horizonte.
Oliveira, S. L.; Carvalho, D. O. e Capurro, M. L. (2011). Mosquito transgênico: do
paper para a realidade. Revista da Biologia, v. 6b, p. 38–43.
Rattes,
L.
Pesquisa
busca
reduzir
população
do
mosquito causador da dengue,
outubro(2011).
URL http://www.
cienciaecultura.ufba.br/agenciadenoticias/noticias/destaques/
pesquisa-busca-reducao-da-populacao-da-dengue-em-juazeiro/.
Acesso
em: novembro de 2011.
Ribeiro, F. F. setembro(2009). Um algoritmo genético adaptativo para a resolução
do problema desequenciamento em uma máquina com penalização por antecipação
eatraso da produção. Dissertação (mestrado em modelagem matemática e computacional), Centro Federal de Educação Tecnológica de Minas Gerais, Belo Horizonte
- MG.
Rodhain, F. e Rosen, L. (1997). Mosquito vectors and dengue virus-vector relations
ships. Gubler, DJ, Kuno, G. Editors. Dengue and dengue hemorragic fever., p.
45–60. New York: CAB International.
Sá, C. B. P. Calibração automática de modelos ecológicos baseados emequações diferenciais ordinárias utilizando algoritmos genéticos. Tese (doutorado em ciências em
engenharia civil), COPPE - Universidade Federal do Rio de Janeiro, Rio de Janeiro
- RJ, Agosto(2003).
Sampaio, P. R. Março(2011). Teoria, métodos e aplicações de otimização multiobjetivo. Dissertação (mestrado em ciência da computação), Universidade de São
Paulo, São Paulo.
Santana, Nilmar Bispo. Junho(2012). Influência das medidas educacionais no controle de epidemias via modelo matemático sier. Dissertação (mestrado em mode-
5
Referências Bibliográficas
97
lagem matemática e computacional), Centro Federal de Educação Tecnológica de
Minas Gerais, Belo Horizonte, MG.
Silveira, E. Solução genética: Mosquitos transgênicos serão soltos em juazeiro, na bahia, para combater a dengue, Fevereiro(2011). URL http://www.
revistapesquisa.fapesp.br/pdf/180/076-079-180.pdf. Acesso em: novembro
de 2011.
SISSaúde, Sistema De Informação Em Saúde. Risco de epidemia de dengue com
sorotipo 4 no brasil aumenta formas mais graves da doença. Disponível em:
<http://sissaude.com.br/sis/inicial.php?case=2&idnot=9911>, (2011). Acesso em:
agosto de 2011.
Soares, G. L. Algoritmos Determinístico e Evolucionário Intervalares para Otimização Robusta Multi-Objetivo. Tese (doutorado em engenharia elétrica), Universidade
Federal de Minas Gerais, Belo Horizonte, MG, outubro(2008).
SUCEN, Superintendência De Controle Em Endemias. Controle integrado dos vetores de dengue, (2011). URL http://www.sucen.sp.gov.br/downl/vetores_
geral/den_contri.pdf. Acesso em: setembro de 2011.
SVS, Secretaria De Vigilância Em Saúde. Taxa de incidência de dengue. brasil e
grandes regiões, 1990-2010, (2011). URL http://portal.saude.gov.br/portal/
arquivos/pdf/gra_taxa_incidencia_dengue_bra_gr_90_10.pdf. Acesso em:
Agosto de 2011.
Takahashi, R. H. C. janeiro(2007)a. Otimização Escalar e Vetorial. Volume 1:
Conceitos Preliminares. Belo Horizonte, MG.
Takahashi, R. H. C. janeiro(2007)b. Otimização Escalar e Vetorial. Volume 2:
Otimização Escalar, volume 2. Belo Horizonte, MG.
Takahashi, R. H. C. janeiro(2007)c. Otimização Escalar e Vetorial. Volume 3:
Otimização Vetorial, volume 3. Belo Horizonte, MG.
Takahashi, R.H.C.; Vasconcelos, J. A.; Ramirez, J. A. e Krahenbuhl, L. Maio(2003).
A multiobjective methodology for evaluating genetic operators. IEEE Transactions
on Magnetics, v. 39, n. 3, p. 1321–1324.
Tanomaru, J. 29/out a 01/nov(1995). Motivação, fundamentos e aplicações de
algoritmos genéticos. II Congresso Brasileiro de Redes Neurais. III Escola de Redes
Neurais, Curitiba.
5
Referências Bibliográficas
98
Teixeira, M. G.; Barreto, M. L. e Guerra, Z. (1999). Epidemiologia e medidas de
prevenção do dengue. Informe Epidemiológico do SUS 1999, v. 8, p. 5–33.
Thomé, R. C. A. Controle Ótimo Aplicado na Estratégia de Combate ao Aedes
aegypti Utilizando Inseticida e Mosquitos Estéreis Tese de Doutorado. Tese (doutorado em matemática aplicada), Universidade Estadual de Campinas, Campinas,
(2007).
USP, Universidade De São Paulo.
Pesquisa do cena mostra
que
radiação
impede
reprodução
do
mosquito
da
dengue,
Agosto(2012).
URL
http://www5.usp.br/14438/
pesquisa-do-cena-mostra-que-radiacao-impede-reproducao-do-mosquito-/
da-dengue/.
Von Zuben, F.J.
Computação evolutiva:
Uma abordagem pragmática,
(2000). URL ftp://ftp.dca.fee.unicamp.br/pub/docs/vonzuben/tutorial/
tutorialEC.pdf.
Wearing, H. J. (2006). Ecological and immunological determinants of dengue epidemics. Proc. Natl. Acad. Sci., v. 103, n. 31, p. 1802–11807.
WHO, Wolrd Health Organization.
Dengue:
guidelines for diagnosis,
treatment,
prevention
and
control.
special
programme
for research and training in tropical diseases.
Disponível em:
<http://whqlibdoc.who.int/publications/2009/9789241547871_eng.pdf>, (2009).
Acesso em: agosto de 2011.
Wilke, A. B. B.; Gomes, A. C.; Natal, D. e Marrelli, M. T. (2009). Controle de
vetores utilizando mosquitos geneticamente modificados. Rev Saúde Pública, v. 43,
n. 5, p. 869–74.
Yang, H. M. (2003). Epidemiologia da transmissão da dengue. TEMA Tend. Mat.
Apl. Comput., v. 4, n. 3, p. 387–396.
Yang, H. M. e Esteva, L. Setembro(2005). Controle biológico de mosquito
aedes aegypti. XXVIII CNMAC - Congresso Nacional de Matemática Aplicada, São Paulo. SBMAC - Sociedade Brasileira de Matemática Aplicada e Computacional. URL http://www.sbmac.org.br/eventos/cnmac/cd_xxviii_cnmac/
resumos%20estendidos/hyun_yang_ST2.pdf.
Yang, H. M.; Ferreira, C. P. e Ternes, S. (2003). Dinâmica populacional do vetor
transmissor da dengue. TEMA Tend. Mat. Apl. Comput., v. 4, n. 2, p. 287–296.
5
Referências Bibliográficas
99
Yang, H. M. e Thomé, R. C. A. (2007). Controle Ótimo do mosquito Aedes aegypti
via técnica de insetos estéreis. Sociedade Brasileira de Matemática Aplicada e Computacional.
Baixar