Rogério Dumbá
Robótica
FUNDAMENTOS ROBOTICA
CAPITULO 2
SISTEMA DE COORDENADAS
Em matemática, um sistema de coordenadas é um sistema para se
especificar uma ênupla (também conhecida como n-tuplo, ou nupla) é uma seqüência ordenada de n elementos, que pode ser
definida pela recursão do par ordenado.
As principais propriedades que distinguem uma enupla de um
conjunto são:
Uma enupla pode conter um objeto mais de uma vez.
Os objetos são representados obrigatoriamente na ordem dada.
Deve notar-se que a primeira das características distinguem uma
enupla de um conjunto ordenado e a segunda, de um multiconjunto.
de escalares a cada ponto num espaço n-dimensional. O espaço no
qual é sobreposto o sistema de coordenadas não necessariamente
precisa ter definida uma métrica, tal como no caso do espaço
riemmaniano no contexto da relatividade. Os "escalares" em muitos
casos são números reais mas, dependendo do contexto, também
podem ser números complexos ou membros de outro corpo
qualquer. De forma mais geral, as coordenadas podem por vezes
ser retiradas de anéis ou outras estruturas algébricas semelhantes.
A fim de que se especifique de forma não ambígua a posição de
cada ponto neste espaço, é necessário que se defina uma origem e
uma orientação.
Para que se atribua a cada ponto do espaço uma ênupla de
números, é necessário que ao longo de cada curva coordenada se
possa definir uma variedade, de tal forma que exista uma
correspondência biunívoca entre a intersecção dessas variedades e
um ponto. Assim, cada ênupla equivale a determinar a posição de
cada variedade ao longo de cada curva coordenada.
Embora qualquer sistema de coordenadas específico seja útil para
cálculos numéricos num espaço dado, considera-se que o próprio
espaço existe independentemente de uma qualquer escolha de
coordenadas.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Posição
A posição de um corpo especifica-se através das suas coordenadas
num certo referencial ou do seu vector posição.
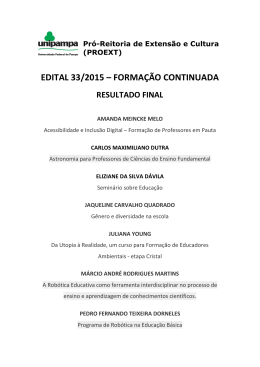
A esfera armilar é um instrumento de astronomia aplicado em
navegação, que consta de um modelo reduzido da esfera celeste. A
esfera armilar foi desenvolvida ao longo dos tempos por inúmeros
povos que habitavam o lado asiático. Seus registros constam em
pinturas de cerâmica e documentos que os chineses durante o
século I A.C. (Dinastia Han) já conheciam a esfera armilar, sabe-se
também, que nessa época, um astrônomo chinês Zhang Heng
considerado a primeira pessoa a usar engrenagens e mecanismos
de articulação hidráulicas no eixo da esfera armilar para reproduzir
os movimentos da mecânica celeste para fins didáticos, entretanto o
nome do instrumento vem do latim armilla ("bracelete"), visto que
tem um esqueleto feito de anéis concêntricos articulados nos polos
com escala de graduações e outros perpendiculares representando
o equador, a eclíptica , indicando o curso do sol em relação as
estrelas de fundo para os 365 dias do ano, os meridianos e os
paralelos.
O equipamento, apesar de ter tal uso, não é uma defesa dos
sistemas heliocêntrico ou geocêntrico e sim um substituto dos
conhecimentos da álgebra e trigonometria que permite organizar o
movimento aparente das estrelas em pontual. Nesse sentido, a bola
no meio das esferas, representando a Terra ou, atualmente, o Sol
nada mais são de representações errôneas que não tem a ver com
suas funções e sim com o desconhecimento completo com respeito
ao instrumento.
Nota: Antes do advento do telescópio no século XVII, a esfera
armilar já era um instrumento primário de todos os navegadores na
correção da posição estimada segundo a posição aparente dos
astros.
Para fins de posicionamento global, a Esfera armilar, que se tornou
num dos emblemas de D. Manuel I, tem por missão projetar o plano
de inclinação do observador na esfera superior, não estando
previsto provar quem é quem no centro de todas as esferas já que o
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
tanto o observador como as coordenadas da própria terra
encontram-se projetadas na esfera superior.
Esfera Amilar
Esfera armilar colocada no topo do Pelourinho existente em
Constância não possui vestígio algum da esfera terrestre.
A teoria mais aceite ou o efeito que mais respondia a questão:
Porque o universo não desabava sobre a terra? É que os astros
estariam fixos em esferas transparentes e cada uma possuía um
diâmetro compatível com sua distância à terra. A partir da lua, a
mais próxima, depois do Sol, existiam inúmeras outras esferas, uma
para cada planeta, que eram tratados como as estrelas errantes.
Embora soubessem que não existiam esferas de vidros no
firmamento, resolveram mesmo assim recriar um universo em
miniatura que pudessem mimetizar a mecânica celeste como num
laboratório. Em substituição das esferas imaginárias de vidro,
fizeram vários anéis que deram o nome de armilas. Cada armila
seria então o círculo máximo de sua esfera que respondia por sua
estrela, originando inúmeras armilas. Dispostas umas sobre as
outras e com seus próprios eixos representando o movimento da
lua, do sol, das estrelas errantes (planetas), com exceção da esfera
terrestre e das fixas que eram representados por uma única armila
situada na esfera superior (a mais exterior), uma vez tratar-se o
conjunto de uma visão antropocêntrica do universo e que envolve a
projeção do plano de inclinação do observador na esfera das
estrelas fixas.
A esfera do Sol, representada pela a armila mais larga era inclinada
66,6 graus medidos do polo celeste em direção ao trópico mais
próximo ou seu complemento 23,4 graus afastado do equador aos
trópicos formando um dístico (limitado entre os trópicos) com
inscrições que indicavam os Abraxas, termo gnóstico que se refere
ao curso do sol com relação as estrelas de fundo nos 365 dias do
ano.
Na época medieval era muito usado por navegadores do oriente. Os
“cosmógrafos” faziam a função dos astrônomos de hoje… (hindus,
árabes e chineses)
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
SISTEMA DE COORDENADAS
Chama-se Sistema de Coordenadas no plano cartesiano ou espaço
cartesiano ou plano cartesiano um esquema reticulado necessário
para especificar pontos num determinado "espaço" com dimensões.
Cartesiano é um adjetivo que se refere ao matemático francês e
filósofo Descartes que, entre outras coisas, desenvolveu uma
síntese da álgebra com a geometria euclidiana. Os seus trabalhos
permitiram o desenvolvimento de áreas científicas como a
geometria analítica, o cálculo e a cartografia.
A idéia para este sistema foi desenvolvida em 1637 em duas obras
de Descartes:
Discurso sobre o método
Na segunda parte, Descartes apresenta a ideia de especificar a
posição de um ponto ou objecto numa superfície, usando dois eixos
que se intersectam.
La Géométrie onde desenvolve o conceito que apenas tinha sido
referido na obra anterior.
Coordenadas cartesianas na reta
I) Eixo cartesiano
Toda reta orientada, com uma base estável e com um segmento
adotado como unitário é denominado Eixo cartesiano.
(o) = origem
(U) = unidade
(e) = eixo
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
II) Medida Algébrica
A medida algébrica de um segmento orientado entre o eixo (e) é um
número verdadeiro, do qual o módulo representa o tamanho do
segmento e cujo sinal seja positivo ou negativo, assim como o
sentido do segmento concorde ou discorde do sentido de eixo:
Vejamos o exemplo:
III) Abscissa
(e) representa o eixo cartesiano.
A cada ponto P de e equivale a um único número verdadeiro xp e
mutuamente. Desta forma:
“Há uma aplicação bijetora entre o conjunto dos números reais e o
conjunto dos pontos de eixo cartesianoe”.
Circunstancialmente:
“A abscissa de um ponto P sobre um eixo cartesiano e é o número
verdadeiro xp que a ele corresponde.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Na representação:
P (Xp) .......... abscissa de P é XP.
A (XA).......... abscissa de A é XA.
Note que a abscissa de um ponto de um eixo é na verdade a
medição algébrica do segmento .
A base separa o eixo em dois grupos de pontos: Abscissas
positivas e negativas.
Medida algébrica de um segmento orientado
Sendo as abscissas de pontos A e B de e, determinaremos o
calculo algébrico (AB) do segmento orientado
.
Considerando A (XA) e B (XB), a Relação de Chasles, temos:
OA + AB + BO = 0 ⇔ OA + AB – OB = 0 AB = OB – OA
Assim: AB = XB - XA
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Coordenadas cartesianas ortogonais no plano
Sistema de coordenadas ortogonal
Dados os eixos
perpendiculares em O e seja α o plano
estabelecido por eles.
Por meio de um ponto P qualquer do plano α levemos as paralelas
aos eixos, que irão interceptar
, mutuamente em P1 e P2.
Ao selecionar uma unidade (geralmente a mesma entre os dois
eixos), seguiremos a nomenclatura:
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
I-) Abscissa representada pelo número real XP = OP1.
II-) Ordenada representada pelo número real YP = OP2.
III-) Coordenadas de P representada por números reais XP e
YP mencionados no modelo (XP; YP) de um par ordenado.
IV-) Denominaremos Eixo das Abscissas o eixo dos x ou
.
V-) Denominaremos Eixo das Ordenadas o eixo dos y ou
.
VI-) Denominaremos Plano cartesiano o plano estabelecido pelo
par de eixos
.
VII-) A base ou origem do sistema de coordenadas é o ponto O.
É importante ressaltar que:
a) Qualquer ponto do eixo das abscissas possui ordenada nula.
b) Qualquer ponto do eixo das ordenadas possui abscissa nula.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
c) As coordenadas da base ou origem são nulas.
d) Segmento paralelo ao eixo das abscissas
Considerando os diferentes pontos A (XA; YA) e B (XB; YB), o
segmento da reta
é paralelo ao eixo das abscissas caso, A e B
contenham a mesma ordenada.
Vejamos a figura:
Através do módulo da diferença das abscissas dos pontos A e B é
que é dada a medida do segmento
.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
e) Segmento paralelo ao eixo das ordenadas
Considerando os diferentes pontos C (XC; YC) e D (XD;YD), o
segmento da reta
é paralelo ao eixo das ordenadas e somente C
e D possuem a mesma abscissa.
Vejamos a figura:
Através do módulo da diferença das ordenadas dos pontos C e D é
dada a extensão do segmento .
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Quadrantes:
Chamamos de quadrantes, o plano partido em quatro pelos
eixos
.
Sinais das coordenadas:
a) Somente se tiver a abscissa e a ordenda positivas, o ponto
pertencerá ao 1º quadrante.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
b) Somente se tiver a abscissa negativa e a ordenada positiva, o
ponto pertencerá ao 2º quadrante.
c) Somente se tiver a abscissa e a ordenada negativas, o ponto
pertencerá ao 3º quadrante.
d) Somente se tiver a abscissa positiva e ordenada negativa, o
ponto pertencerá ao 4º quadrante.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Bissetrizes dos quadrantes:
Bissetrizes dos quadrantes ímpares (I e III)
Qualquer ponto da bissetriz dos quadrantes ímpares possui
abscissa idêntica à ordenada.
Daí surge o resultado que a equação da bissetriz dos quadrantes
ímpares é:
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Bissetrizes dos quadrantes pares (II e IV)
Qualquer ponto da bissetriz dos quadrantes pares possui abscissa
contrária à ordenada.
Daí surge o resultado que a equação da bissetriz dos quadrantes
pares é:
Distância
entre
dois
pontos
Considerando os diferentes pontos A(xA; yA) e B(xB; yB), vamos
aplicar o teorema de Pitágoras no triângulo ABC para
determinarmos a extensão entre os pontos A e B.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
A extensão entre os pontos será mostrada por dAB. Assim:
Equação de uma curva
Dizemos que uma equação nas variáveis x e y é a equação de uma
curva λ se, e somente se:
- as coordenadas de todos os pontos de λ satisfazem a equação.
- todo par (x; y) solução da equação representa um ponto da curva
λ.
Observe que, se o ponto P(xP; yP) pertence a λ, suas coordenadas
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
xp e yp satisfazem a equação de λ.
Interceptos de uma curva
Interceptos de uma curva são os pontos em que a curva corta o
eixo cartesiano.
Na figura acima, o ponto A(xA; 0) é o intercepto no eixo
yB) é o intercepto no eixo .
e B(0;
Intersecção de curvas
Considere λ1 e λ2 como duas curvas planas de equações s1 e s2,
respectivamente.
Dizemos que todo ponto P é a intersecção de λ1 e λ2, tal que P
pertença, simultaneamente, às duas curvas λ1e λ2 e, portanto,
satisfaça as equações s1 e s2.
Desse modo:
Ponto médio de um segmento
Considerando os dois pontos A (xA; yA) e B(xB; yB) com A diferente
de B, as coordenadas do ponto M, médio de
, são obtidas
aplicando: teorema de Tales.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Ângulos
Ângulos na circunferência
Ângulo central
Ângulo central é todo o ângulo que possui o vértice no centro da
circunferência.
Na figura abaixo, AB é o arco que corresponde ao ângulo central
AÔB.
Se considerarmos a unidade de arco unitário, o arco será definido
por um ângulo central unitário, dessa forma teremos a medida do
ângulo AÔB igual à medida do arco AB.
Vejamos:
Ângulo inscrito
Ângulo inscrito em uma circunferência é todo o ângulo que tem o
vértice na circunferência, onde seus lados são secantes à ela. A
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
medida do ângulo inscrito é sempre a metade da medida do arco
que ele estabelece na circunferência.
Ângulo de segmento
Ângulo de segmento é todo ângulo em que o vértice pertence à
circunferência, sendo um dos lados secante e o outro tangente. A
medida do ângulo de segmento é a metade do arco por ele
estabelecido.
Na figura abaixo, α é considerado um ângulo de segmento, que
estabelece na circunferência o arco AB.
Vejamos:
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Ângulo excêntrico interior
Ângulo excêntrico interior é aquele ângulo que possui como vértice
um ponto longe do centro da região interior da circunferência.
^
Na figura, o ângulo APB é excêntrico interior e estabelece na
circunferência o arco AB. As retas
↔
↔
PA e PB interceptam a circunferência nos pontos C e D,
estabelecendo o arco CD. A medida do
ângulo APB é a metade da soma dos arcos AB e CD.
Logo:
Ângulo excêntrico exterior
Ângulo excêntrico exterior é aquele ângulo que possui como vértice
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
um ponto da região exterior da circunferência, e lados secantes ou
tangentes à circunferência.
^
Na figura, o ângulo APB é excêntrico exterior e determina na
circunferência os arcos AB e CD.
^
A medida do ângulo APB é a metade da diferença entre os arcos
AB e CD.
Logo:
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Elemento da circunferência
Elemento da circunferência é a definição de circunferência de
centro O e raio r:
Vejamos:
a) Corda:
Corda são os segmentos de reta onde os pontos distintos da
circunferência são suas extremidades.
b) Diâmetro
Diâmetro é a qualquer corda que passa pelo centro da
circunferência, onde a medida do diâmetro é o dobro do raio.
Vejamos:
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
c) Arco
Arco é cada parte que fica dividida uma circunferência quando
pegamos dois pontos seguidos na mesma circunferência.
Vejamos:
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Posições relativas de reta e de circunferência Tangente
Considerando a reta t, como sendo a tangente à circunferência de
centro O e raio r no ponto de T, logo t é perpendicular a OT e a
distância do ponto O à reta t é igual a r.
Vejamos:
Secante
A reta secante é toda reta que possui dois pontos em comum, junto
com uma circunferência.
É importante sabermos que a distância do centro da circunferência
a uma reta secante é sempre menor que o raio.
Potência de ponto
Potência de um ponto em relação a uma circunferência
Considerando um ponto P e uma circunferência λ, dizemos que
uma reta r passa por P e interrompe λ tanto no ponto A, como no
ponto B.
O produto das medidas dos segmentos PA e PB nada mais são do
que a potência do ponto P em ralação a λ.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Vejamos:
Observações:
vejamos:
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Propriedade da potência de ponto
Propriedade da potência de ponto é a potência do ponto em relação
à circunferência, sem depender da reta, sem interceptar a
circunferência.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Diedros
Os planos secantes α e β estabelecem no espaço quatro semiespaços.
O corte de dois desses semi-espaços é chamado de diedro.
Na imagem:
α e β representam as faces.
A reta a representa a aresta do diedro determinado pelo corte dos
semiplanos I e I’.
Secção reta de um diedro
Chamamos de seção reta, o angulo determinado pelo corte de um
diedro com um plano perpendicular a sua aresta.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Na imagem:
A superfície perpendicular à aresta a determina a secção reta
definida pelo ângulo
São congruentes, todas as secções retas do mesmo diedro.
A proporção de um diedro é a proporção da sua secção reta.
Dois diedros são congruentes, sempre que suas secções são
congruentes.
Caso o plano π não seja perpendicular à aresta a, obteremos
apenas uma secção inclinada.
Poliedros
Superfície poliédrica
Chama-se superfície poliédrica a junção de um número limitado n (n
∈ N*) de polígonos planos, assim:
a-) Jamais são clopanares, dois polígonos com um lado em
comum;
b-) Cada lado do polígono esta no máximo em dois polígonos.
c-) Qualquer polígono tem ao menos um lado comum com dos
outros polígonos.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Elementos
Obtemos em numa superfície poliédrica, as faces que são os
polígonos, as arestas que são as laterais dos polígonos e os
vértices, que são os vértices dos polígonos. Assim,
• A aresta que é lado de um único polígono é denominada aresta
livre.
• Já a aresta que é lado de dois polígonos é denominada aresta
dupla.
Superfície poliédrica aberta
Classificação
A superfície poliédrica que tem aresta livre é
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
denominada superfície poliédrica aberta. Já a que não possui a
aresta livre é denominada superfície poliédrica fechada.
Superfície poliédrica fechada
Superfície poliédrica convexa
Sempre que o plano de cada polígono deixa todos os demais
polígonos num mesmo semi- espaço este é denominado superfície
poliédrica convexa.
Superfície poliédrica não convexa
Poliedro
O poliedro é ponto do espaço demarcado por uma superfície
poliédrica fechada. O poliedro demarcado pela superfície poliédrica
convexa é denominado poliedro convexo.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Poliedro convexo
Relações de Euler
I) Dada uma superfície poliédrica convexa aberta com vértices (V),
arestas (A) e faces (F), teremos:
II) Dada uma superfície poliédrica convexa fechada com
vértices (V), arestas (A) e faces (F), teremos:
Chamamos de poliedro Eureliano, qualquer poliedro que sacie
essa relação.
Observação:
“Todo poliedro convexo é Eureliano, mas nem todo poliedro
Eureliano é convexo”.
Note que o poliedro abaixo não é convexo, mas segue a relação V –
A + F =2.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Soma dos ângulos das faces
Em todo poliedro convexo de vértices (V), a soma dos ângulos de
todas as suas faces é dada por:
Poliedros de Platão
Chamamos de poliedros de Platão, quando todas as faces têm o
mesmo número de lados, quando em todos os vértices coincidem o
número de arestas e quando segue a relação de Euler (V – A + F
=2).
Poliedros de Platão:
• Tetraedro
• Hexaedro
• Octaedro
• Dodecaedro
• Icosaedro
Vejamos a tabela para os poliedros de Platão:
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Poliedros regulares
O poliedro é considerado poliedro de regular, quando for um
poliedro de Platão e todas as suas faces forempolígonos
regulares.
Vejamos os cinco poliedros regulares existentes:
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Triedros
Definição
Considerando
como três semi-retas de mesma origem V e
não coplanares, consideremos os semi-espaços I, II, III:
• I com base na superfície (bc) e contendo
• II com base na superfície (ac) e contendo
• III com base na superfície (ab) e contendo
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
O corte dos semi-espaços I, II e III é chamado triedro determinado
por
.
Relações entre as faces de um diedro
I) Em todo triedro, qualquer face é menor que a soma das outras
duas.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Desta forma, sendo f1 f2 e f3 as superfícies de um diedro, teremos:
II) A soma das medidas (em graus) das superfícies de um triedro
qualquer é inferior a 360º.
Relações entre os diedros de um triedro
I) Em todo e qualquer triedro, a medida (em graus) de um diedro
aumentada de 180º ultrapassa a soma da extensão dos dois.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Desta forma, sendo d1 d2 e d3 as medidas em graus dos diedros de
um triedro:
II) Está contida entre 2 retos (180º) e 6 retos (540º) a soma dos dois
diedros de um triedro.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
TRANSFORMAÇÃO DE COORDENADAS
Um dos objetivos da Geometria Analítica é a determinação das
propriedades de várias curvas e configurações geométricas, mas à medida que
as estudamos, verificamos que as curvas e suas equações se tornam mais
complicadas e mais difíceis de serem analisadas; em conseqüência, torna-se
necessário, em várias ocasiões, estudar novos recursos a fim de facilitar o
estudo
destas
curvas.Assim,
é
conveniente
introduzir
a
noção
de
transformação de coordenadas, recurso que nos possibilita simplificar as
equações de muitas curvas
Uma transformação é uma operação por meio da qual uma relação,
expressão ou figura é mudada de acordo com uma dada lei. Analiticamente a
lei dada é expressa por uma ou mais equações denominadas equações de
transformação.
A solução é simples, basta exprimir os valores das coordenadas de um
ponto genérico no sistema particular, em função das coordenadas do mesmo
ponto no novo sistema, a partir de uma determinada lei de transformação.
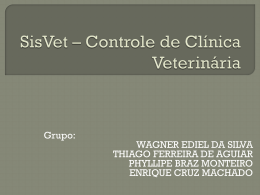
TRANSLAÇÃO DE EIXOS COORDENADOS
Na translação de eixos coordenados mudamos a origem e conservamos
as direções e os sentidos destes eixos.
Sejam XOY o sistema particular e X'O'Y' o novo sistema.
O novo sistema X'O'Y', percebemos facilmente, que é definido, em
relação ao primeiro, pelas coordenadas h e k da origem O' e pela condição O'X'
e O'Y' serem, respectivamente, paralelos e do mesmo sentido que OX e OY.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Y
Y'
P (x.y) ou P (x', y’)
y
y'
x'
O'(h ,k)
X'
k
O
h
x = x ' +h
então,
y = y'+k
e
x' = x − h
y' = y − k
x
X
é a fórmula de mudança do sistema XOY para X'O'Y'
é a fórmula de mudança do sistema X'O'Y' para o
XOY
EXEMPLOS:
1) Transforme a equação 7xy–14x–21y–13=0 em outra equação sem os termos
do 1o grau, usando a translação de eixos coordenados.
x= x' + h e y = y' + k ⇒ 7(x' + h)(y' + k) – 14( x' + h) – 21(y' +k) – 13=0 ⇒
7x'y' + 7kx' + 7hy' + 7hk –14x'–14h –21y'– 21k =0 ⇒ 7x'y'+(7k –14)x' + ( 7h 21)y'+ 7hk –14h –21k – 13 = 0 ⇒
7h − 21 = 0
7k − 14 = 0
⇒
O'(3,2) ⇒
7x'y' – 7.3.2 –14.3–21.2=0
⇒
7x'y' –
55=0.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
2) Transforme a equação x2 +y2–6x +2y -6=0 em relação a um novo sistema de
coordenadas, de eixos paralelos aos primeiros e origem conveniente para
que na nova equação não figurem os termos em 1o grau.
1a maneira: quando não se conhece a equação geral da curva.
x= x' +h e y= y'+ k ,
⇒
( x' + h)2 +( y'+ k)2 – 6(x'+ h) + 2( y′ +k) –
6=0 ⇒
x '2 + y'2 +(2h –6)x' + (2k + 2)y' + h2 + k2 –6h +2k– 6=0 ⇒
2h − 6 = 0
2k = 2 = 0
⇒ O'( 3,–1) , substituindo na equação ⇒ x'2 + y'2 = 16.
2a maneira : quando se conhece a equação geral da curva, neste caso é um
círculo, de equação geral é (x–h)2 + (y–k)2 = R2
( x2 – 6x + 9) +( y2 + 2y +1) = 6 +9 + 1 ⇒
( x– 3)2 + ( y +1)2 = 16 , fazendo
x+3 = x' e y−1=y' , temos O'(3,−1) e a equação se transforma em x'2 + y'2 =
16.
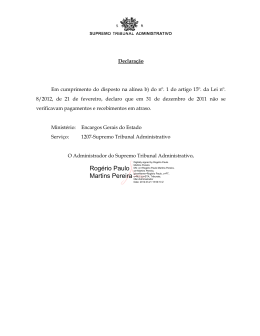
ROTAÇÃO DE EIXOS COORDENADOS
Na rotação, mudamos a direção dos eixos sem mudarmos a origem.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Seja o sistema XOY, através de uma rotação dos eixos de um ângulo θ ,
mantendo a mesma origem, obtém - se um novo sistema X ‘O Y ’ .
Y
Y'
P(x, y) ou P(x',y')
y
X'
θ
y'
D
C
x'
O
X
θ
A
B
x
Mudança do sistema XOY para o sistema X’O Y ‘ :dos triângulos OBC
e PDC, podemos dizer que
x = OA = OB − AB
, e que,
y = AP = AD + DP
OB = x’ cos θ , AB = DC = y’ senθ , AD = BC =x’ senθ , DP = y’ cos θ
Substituindo, tem-se:
x = x ′ cos θ − y′ sen θ
y = x ′ sen θ + y′ cos θ
Mudança do sistema X ‘ O Y ‘ para o sistema XOY:procedendo do
mesmo modo obtém-se
x ′ = x cos θ + y sen θ
y′ = x sen θ + y cos θ
EXEMPLO
1)Por uma rotação de eixos coordenados, transformar a equação 9x224xy+16y2-40x-30y=0, em outra equação desprovida do termo xy.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
x = x ′ cos θ − y ′senθ
Solução: substituindo
,na equação teremos,
y = x ′senθ + y ′ cos θ
9(x'cosθ −y'senθ)2−24(x'cosθ − y'senθ)(x'senθ + y'cosθ)+16(x'senθ+y'cosθ)2 −
40(x'cosθ − y'senθ) − 30(x'senθ + y'cosθ) =0
Que após o desenvolvimento e redução se termos semelhantes, assume a
forma
(9cos2θ −24cosθsenθ+16sen2θ)x'2 +(14senθcomθ+24sen2θ−24cos2θ)x'y' +
+(9sen2θ+24senθconθ+16cos2θ)y'2 − (40cosθ+30senθ)x' −(40senθ−30cosθ)y'=0
Visto que a equação transformada deve ser desprovida do termo
x'y',igualamos a zero o coeficiente de x'y' e obtemos:
14senθcosθ+24sen2θ−24cos2=0.
Ora, sen2θ=2senθcosθ e cos2θ=cos2θ −sen2θ.Logo a última relação pode
ser escrita
7sen2θ − 24 cos2θ
Onde
tg2θ =
24
, logo θ=36052= 11,63''
7
senθ=0,6 e cosθ=0,8
Substituindo esses valores de senθ e cosθ na equação, temos:
(5,76−11,53+5,76)x'2 + (3,24+11,52+10,24)y'2 −(32+18)x' + 24−24)y' =0
25y'2 − 50x'=0 ⇒
y'2 − x' =0
O lugar geométrico é uma parábola como está mostrando a figura abaixo
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
4.0
y
3.0
2.0
1.0
−4.0
−3.0
−2.0
−1.0
1.0
2.0
3.0
x
5.0
4.0
−1.0
−2.0
−3.0
−4.0
SIMPLIFICAÇÃO DE EQUAÇÕES MEDIANTE ROTAÇÃO DE EIXOS
A principal aplicação de mudança dos eixos coordenados é a
simplificação das equações, pela escolha conveniente dos novos eixos.
A fim de mostrar a possibilidade dessa simplificação, demonstraremos o
seguinte teorema:
Teorema: É sempre possível eliminar o termo xy da equação do segundo
grau com duas variáveis:
Ax2 + B y 2 + C xy + D x + E y + F = 0
(1)
Mediante uma rotação dos eixos coordenados.
Com efeito, as fórmulas de rotação dos eixos são:
x = x ′ cos θ − y ′senθ
, sendo θ o ângulo de rotação.
y = x ′senθ + y ′ cos θ
Substituindo em (1) e ordenando desenvolvendo e reduzindo a termos
semelhantes temos:
(Acos2θ +B senθcosθ+Csen2θ)x'2 + [Bcos2θ − (A−C)sen2θ]x'y' + (Asen2θ −
Bsenθcosθ+Ccos2θ)y'2 +(Dcosθ +Esenθ)x'+(Ecosθ−Dsenθ)y'+F=0.
Para ser eliminado o termo x'y', devemos ter:
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Bcos2θ − (A−C) sen2θ=0
Donde
C
A -B
Como o valor de θ é real, quaisquer que sejam os valores de A,B e C,concluise que é sempre possível eliminar o termo xy da equação (1), como queríamos
demonstrar.
Observação: pela rotação dos eixos coordenados o termo F da equação não se
altera.
tg 2 θ =
EXEMPLO
Elimine, usando rotação de eixos , o termo xy da equação x2 +4xy+y2=4
Sabe-se que : A =1 , B =1 e C =4 ⇒ tg 2θ =
2
2
x′ −
y′
x =
2
2
2
2
y = 2 x ′ + 2 y ′
4
1− 1
⇒ 2θ=900
⇒ θ= 450 ⇒
⇒ Substituindo na equação ⇒
2
2
2
2
2
2 2
2 2
2
x′ −
y′ +4
x′ −
y′
x′ +
y′ +
x′ +
y ′ =4
2
2
2 2
2 2
2
2
1 2
1
1
1
x’ - x’y’ + y’2+ 2x’2 – 2y’2 + x’2 + x’y’ + y’2 = 4 ⇒ 3x’2 – y’2 = 4
2
2
2
2
4.0
y
3.0
2.0
1.0
−4.0
−3.0
−2.0
−1.0
1.0
2.0
3.0
4.0
x
5.0
−1.0
−2.0
−3.0
−4.0
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
TRANSFORMAÇÃO GERAL : TRANSLAÇÃO E ROTAÇÃO
É quando os eixos coordenados são submetidos a uma translação e
uma rotação , tomados em qualquer ordem. As coordenadas de qualquer ponto
P, referido aos conjuntos de eixos original e final são
(x,y) e (x",y"),
respectivamente, então, as equações de transformações das antigas para as
novas coordenadas finais são dadas por.
x = x ′′ cos θ − y ′′sen + h
y = y ′′senθ + y ′′ cos θ + k
onde θ é o ângulo de rotação e (h,k) são as coordenadas da nova origem
referida aos eixos coordenados originais.
Obs.: 1) Pode-se efetuar , indiferente da ordem .,a translação e a rotação,
separadamente.
2) O grau de uma equação não é modificado por transformação de
coordenadas.
Exemplo: Por meio de uma translação e rotação dos eixos coordenados
transformar a equação
5x2+ 6xy + 5y2 –4x + 4y –4= 0
Para eliminar os termos em 1o grau , façamos:
x=x'+h e y = y'+k
5(x'+h)2 +6(x'+h)(y'+k) +5(y'+k)2 – 4(x'+h) +4(y'+k) – 4 = 0
Desenvolvendo e agrupando convenientemente os termos, temos:
5x'2 +6x'y'+5y'2 +(10h +6k –4)x' + (10k +6h+4)y'+ 5h2 +6hk +5k2+ 4h + 4k
– 4= 0 ⇒
resolvendo o sistema:
10h +6k –4 =0
⇒ h=1 e k= –1 , logo O'( 1,–1),
substituindo na equação
10k +6h+4 = 0
acima,temos:
5x'2 + 6x'y'+5y'2 = 8
Para determinar θ utilizaremos a expressão: tg 2 θ =
C
6
=
A -B
5−5
⇒ 2θ= 900
⇒ θ= 450 ⇒
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
2
x′ −
x =
2
2
y = 2 x ′ +
2
y′
2
2
y′
2
⇒m substituindo na equação, obtida após a translação ⇒
2
2
2
2
2
2 2
2
2
2
x′ −
y′
x′ +
y′ +5
5
x′ −
y′ +6
x′ +
y′ =8
2
2
2
2
2
2
2
2
⇒ 4x"2 + y"2 = 4 , é uma elipse , de eixo maior vertical e vértice na nova
origem.
Y"
Y
Y'
X"
X
O'(1,-1) ≡ C
X"
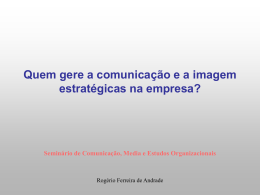
COORDENADAS POLARES
Até agora temos determinado a posição de um ponto do plano utilizando
unicamente as coordenadas cartesianas. Entre os vários sistemas existentes, o
de uso mais freqüente é o sistema de coordenadas polares.
Seja um ponto fixo O, ao qual chamamos de pólo (origem do sistema), e
uma semi - reta e de origem em O, chamada e eixo polar. Um ponto P de um
plano será determinado quando se conhece a distância OP, chamada raio
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
polar, e o ângulo determinado pelo eixo polar e o raio polar, medido
positivamente no sentido trigonométrico.
P
ρ
θ
O
raio polar
e
θ ⇒ ângulo polar
e ⇒ eixo polar
OP = ρ ⇒
Um ponto no sistema polar fica determinado pelo par ordenado ( ρ , θ ).
O número ρ pode tomar qualquer valor real e θ qualquer valor de ângulo,
da seguinte forma: o ângulo será considerado positivo, quando marcado no
sentido trigonométrico e negativo caso contrário. O raio polar ρ será
considerado positivo quando medido sobre o lado terminal do ângulo θ e
negativo quando medido sobre a semi - reta oposta ao lado terminal do mesmo
ânguloθ .
0
2,–30 )
P(2,300)
P(3,1200)
300
1200
E
–300
O
P(–
O
e
e
P(2250)
2250
O
O
e
e
2250
O
e
-300
P(3,2250)
P(2,–300)
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Das convenções estabelecidas resultam, então, que dado um par
ordenado de coordenadas polares, deve-se decidir, um valor de ρ e de θ, tal
que o ponto P (ρ , θ) fique perfeitamente determinado, mas em contrapartida,
dado um ponto P, há infinitos pares de coordenadas que podem corresponder
a esse ponto.
Em geral, um ponto P(ρ,θ), pode corresponder a qualquer dos pares
ordenados (ρ , θ ± 2k π ), ou ( - ρ , θ ± k π ), onde k é um número inteiro.
Relações entre as coordenadas polares e as coordenadas cartesianas
Seja o ponto P referido a um sistema cartesiano XOY e ao sistema
polar, de modo que o pólo esteja coincidente com a origem dos eixos
cartesianos e o eixo polar coincida com o semi - eixo positivo das abscissas
(OX).
No sistema cartesiano o ponto P tem coordenadas x e y e no sistema
polar θ e r
Das relações métricas do triângulo retângulo sabe-se que:
Y
P(x,y) ou P(ρ,θ)
ρ
θ
O
x = ρ cos θ e
y
x
y
tg θ =
x
θ = arc tg
X ou e
y = ρ sen θ , cos θ =
x
x +y
2
2
, senθ =
y
x + y2
2
,
,
; ρ2=x2 + y2 ⇒ r = x 2 + y 2
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Distância entre dois pontos
Sejam os pontos A(ρ1,θ1) e B(ρ2,y2) referidos a um sistema polar ( figura
abaixo)
B
d
ρ2
A
θ2–θ1
θ2
ρ1
θ1
O
e
Para determinarmos a distância d do ponto A ao ponto B, apliquemos a
Lei dos co-senos ao triângulo OAB.
d 2 = ρ 12 + ρ 22 − 2ρ 1ρ 2 cos(θ 2 − θ 1 ) ⇒ d = ρ 12 + ρ 22 − 2ρ 1ρ 2 cos(θ 2 − θ 1 )
Equações Polares da Reta
Seja r uma reta que não passa pelo pólo cuja equação geral é
Ax +By + C = 0
E passando para coordenadas polares, obtemos:
Aρcosθ + B ρ sen θ + C = 0 ou (A cos θ+ B sem θ)ρ + C = 0
que é a equação geral da reta em coordenadas polares.
Equação polar do círculo
Seja ao círculo de centro C(ρ0,θ0 ) e de raio R, e P( ρ, θ) um ponto
qualquer do círculo.
O triângulo OPC nos dá:
ρ2 +ρ02 − 2 ρ0ρ cos (θ − θ0) = R2
que é a equação polar do círculo
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
Casos Particulares
1) Se o centro do círculo está no eixo polar, à direita do pólo, e o círculo
passa pelo pólo, temos:
ρ0= R e θ0= 0
então
ρ= 2R cos θ
Se o centro do círculo estiver à esquerda do pólo, temos:
θ= π
então
ρ=− 2P cos θ
2) Se o centro do círculo está no eixo OU, acima do pólo e o círculo passa
pelo pólo,
π
então
ρ=2Rsen θ
2
Se o centro do círculo estiver abaixo do pólo, temos:
3π
θ=
então
ρ= −2R senθ
2
3) Se o centro está no poço ρ0=0 e a equação do círculo é simplesmente ρ=∀
R
ρ0=R e θ0=
Observe-se que qualquer das duas equações ρ=R e ρ=−R representa a
mesmo círculo. As equações que representam o mesmo lugar o mesmo lugar
geométrico denominam-se equivalentes e ocorrem em virtude de convenção de
sinal das coordenadas polares, constituindo, pois, uma peculiaridade das
equações em coordenadas polares.
EXEMPLOS
1)Transformar as seguintes equações cartesianas em equações polares:
a) x-3y=0
ρcosθ - 3ρsenθ=0 ⇒ cosθ=3senθ ⇒
θ=arctg
sen θ 1
1
=
⇒ tgθ =
cos θ 3
3
⇒
Resp:
1
3
b) x4 +x2y2- (x+y)2 = 0
ρ4cos4θ +ρ2cos2θρ2sen2θ - (ρcosθ+ρsenθ)2 =0 ⇒
ρ4cos4+ ρ4cos2θsen2θ-(ρ2cos2θ+ρ2sen2θ+2ρcosθρsenθ)2 =0 ⇒
ρ4cos4θ+ρ4cos2θ’en2θ-[ρ2(cos2θ+sen2θ)+2ρ2cosθsenθ]=0 ⇒
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
ρ4cos4θ+ρ4cos2θsen2θ - ρ2 – 2ρ2cosθsenθ = 0 (÷ ρ2 ) ⇒ ρ2cos4θ +
ρ2cos2θsen2θ - 1 – 2cosθsenθ = 0 ⇒ ρ2cos2θ(cos2θ+sen2θ)=1+ 2cosθsenθ ⇒
ρ2cos2θ=1+ 2cosθsenθ ⇒ ρ2 =
ρ2=sec2θ +2tgθ
1 + 2 cos θ sen θ
1
2 cos θ sen θ
⇒ ρ2 =
+
⇒
2
2
cos θ
cos θ
cos 2 θ
⇒ ρ2=1+tg2θ+2tgθ
⇒ ρ2=(1+tgθ)2 ⇒
Resp: ρ=1+tgθ
c) 9x2–72x+25y2 –81=0 ⇒ 9ρ2cos2θ + 25ρ2sen2θ –72ρcosθ –81=0 ⇒
9ρ2cos2θ +16ρ2cos2θ –16ρ2cos2θ +25ρ2sen2θ –72ρcosθ –81=0⇒
25ρ2cos2θ+25ρ2sen2θ – 16ρ2cos2θ –72θcosρ – 81 = 0 ⇒ ρ2(25 – 16cos2θ) 72ρcosρ – 81 =0 ⇒ ρ =
72 cos θ ± 5184 cos 2 θ + 8100 − 5194 cos 2 θ
=
2(25 − 16 cos 2 θ)
9( 4 cos θ ± 5)
9( 4 cos θ − 5)
−9
26 cos θ ± 90
=
ρ1 =
=
2
(5 − 4 cos θ)(5 + 4 cos θ) 5 + 4 cos θ
(5 − 4 cos θ)(5 + 4 cos θ
2(25 − 16 cos θ)
⇒ ρ< 0 ( não serve)
9( 4 cos θ + 5)
9
⇒ρ >0
=
(5 − 4 cos θ)(5 + 4 cos θ) 5 − 4 cos θ
ρ2 =
Resp: ρ =
9
5 − 4 cos θ
2)Transformar as seguintes equações polares em equações cartesianas:
a) ρ(1+cosθ)=6 ⇒
x 2 + y 2 1 +
=6 ⇒
2
2
x +y
x
x 2 + y 2 +x =6 ⇒
x 2 + y 2 =6-x
⇒ elevando ao quadrado ambos os lados da equação ⇒ x2 + y2 = 36 – 12x +x2
⇒ Resp: y2 + 12x – 36 = 0
b) ρ =1+2sen2θ ⇒ ρ=1+2.2.senθcosθ ⇒ ρ=1+4senθcosθ ⇒
4
x
x +y
2
2
.
y
x +y
2
⇒ x 2 + y 2 =1+
4 xy
x + y2
2
⇒
2
x 2 + y 2 =1+
2
2
2
x 2 + y 2 (x + y )=x + y + 4xy
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
⇒ (x2+ y2) (x2+ y2)2 = (x2+ y2+ 4xy)2 ⇒
Resp: (x2+ y2)3 =
(x2+ y2+ 4xy)2
3) Determine a distância entre os pontos A(–3,600) e B(4,–600).
d = ρ12 + ρ22 − 2ρ1ρ2 cos(θ2 − θ1 )
d = ( −3)2 + 4 2 − 2( −3).4. cos( −60 0 − 600 ) =
25 − 24 cos 600 =
9 + 16 + 24 cos( −1200 ) =
13
Convertendo coordenadas
As coordenadas polares, r e θ, de um ponto sobre o plano
euclidiano cuja origem é denotada por O são definidas como:
r: a distância entre esse ponto e a origem O,
θ: o ângulo formado entre o segmento de recta que une esse ponto
à origem e o eixo x, também chamado ângulo azimutal.
Da definição anterior, auxiliada pela comparação com o gráfico, podemos concluir as
relações entre o par (x, y) de coordenadas cartesianas e o par (r, θ) de suas
coordenadas polares. Assim obtemos:
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
As coordenadas cilíndricas permitem representar um ponto num
espaço tridimensional e são uma generalização das coordenadas
polares, bidimensionais, acrescentando uma terceira coordenada: a
altura, h.
Assim, um ponto genérico P é dado
em coordenadas cartesianas correspondem a:
por (r,θ,h),
que
r é a distância de O a P', a projecção ortogonal do ponto P no
plano XY. Corresponde à distância de P ao eixo do z.
θ é o ângulo entre a parte positiva do eixo do x e a distância
de O a P', no sentido contrário aos ponteiros do relógio.
h é o mesmo que z.
Para converter de coordenadas cilíndricas para coordenadas
cartesianas usa-se (x,y,z) = (rcos θ,rsin θ,h).
A notação utilizada pode ser diferente. Em Física usa-se
normalmente (ρ,φ,z), e podem ainda ser encontradas as
representações (r,θ,z), (r,ψ,z), (r',ϕ,z) e (ξ1,ξ2,ξ3).
Este sistema de coordenadas é particularmente útil na análise de
superfícies em que zz é um eixo de simetria. Por exemplo, o cilindro
infinito de equação x² + y² = c² representa-se simplesmente
por r = c em coordenadas cilíndricas; daí a denominação destas
coordenadas.
Rogério Dumbá
Robótica
Rogério Dumbá
Robótica
O Sistema esférico de coordenadas é um sistema de
referenciamento que permite a localização de um ponto qualquer
em um espaço de formato esférico através de um conjunto de três
valores, chamados de coordenadas esféricas.
As coordenadas esféricas (r,Θ,Φ) são definidas por (convenção não
norte-americana diferente daquelas adotadas por autores como
John David Jackson de Classical Electrodynamics; Cheng:
De acordo com a figura,
designa a
distância de cada ponto de coordenadas
à
origem, é o ânguloformado entre o semi-eixo positivo x
e o vector
e designa o ângulo entre o semieixo
positivo z o vector
.
Rogério Dumbá
Robótica
Download