☰
Explorar
Assinar em
Inscrever-se
Envio
×
Baixar
Sem categoria
rynaldo zanotele hemerly de almeida leitura automática de
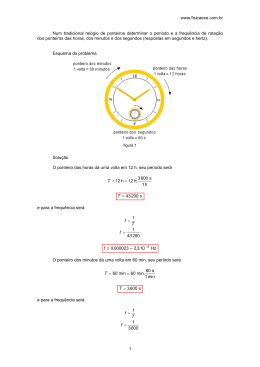
Solução
Atividade O professor de educação física, Marcos
Matemática A –11º Ano
Funções (versão C/C++)
Listas Circulares
Como fazer uma apresentação oral
Manual de Instruções
PSDS - 51 - Praticando com arquétipos