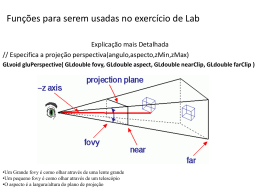
Projeções Clássicas e Matrizes de Projeção do OpenGL Projeções Planas Cônicas A Ap B Bp realista não preserva escala não preserva ângulos Projeções Planas Paralelas A Ap B Bp pouco realista preserva paralelismo possui escala conhecida Classificação das projeções planas Paralelas » ortográficas – plantas – elevações – iso-métrica » oblíquas – cavaleiras – cabinet Cônicas » 1 pto de fuga » 2 ptos de fuga » 3 ptos de fuga dp // n dp não é paralela a n Projeções de um cubo • Paralelas 1 1 1 1/2 1 1 a a planta ou elevação iso-métrica Cabinete (a=45 ou 90) Cavaleira (a=45 ou 90) • Cônicas 1 pto de fuga 2 ptos de fuga Projeção plana é uma transformação linear? Ou seja: T(P+Q) = T(P)+T(Q) e T(aP) = aT(P) ? 2V 2V V (2V)p2(Vp) Vp plano de projeção 2Vp V O O Vp cp cp Projeções cônicas não são TL, paralelas podem ser. Projeção plana paralela é uma transformação linear? T(P+Q) = T(P)+T(Q) ? P+Q retas paralelas projetam em paralelas P Pp O Pp+ Qp Q Pp Qp Qp T( 0 ) = 0 ? Projeção paralela em plano que passa pela origem é uma transformação linear Matrizes de projeções Cavaleiras e Cabinetes y y M 1 k (1,1,1) a 1 x z 3 2 T(1,0,0) = (1,0) T(0,1,0) = (0,1) T(0,0,1) = ( -k cos a, -k sin a ) x 1 0 -k.cos(a) 0 1 -k.sin(a) M = Matrizes de projeções pseudoisométricas y y M j 1 jp (1,1,1) i x k z x ip kp 3 2 T(1,0,0) = (cos 30 ,-sin 30) T(0,1,0) = (0,1) T(0,0,1) = (-cos 30, -sin 30) cos30 0 -cos30 -sin30 1 -sin30 M = Projeção cônica simples xe P ye z e ye P xp Pp y p d Pp ze xe zp = -d xp d = xe -ze xe yp xp xp = d xe -ze yp d = ye -ze ye yp = d ye -ze -ze d d=n ze xe ye ze Projeção cônica simples xp = d xe -ze ye P yp = d ye -ze Pp ze xe zp = -d xp d 0 0 0 xe d xe (d/-ze) xe yp 0 d 0 0 ye d ye (d/-ze) ye 0 0 d 0 ze 0 0 -1 0 1 zp 1 = = d ze = -ze w -d 1 w Simplificação da projeção cônica Projeção cônica Projeção ortográfica eye plano de projeção direção de projeção plano de projeção Distorce o frustum de visão para o espaço da tela ze = -f ye ze xe ze = -n [P]= d=n n 0 0 0 0 n 0 0 0 0 a 0 0 -1 0 ye ze xe ze = -n ze = -f Uma equação para profundidade ze a n a Ptos no near (z=-n): z f a Ptos no far (z=-f): a f n f n [P]= n 0 0 0 0 n 0 0 0 0 n+f nf 0 0 -1 0 n f Translada o paralelepípedo de visão para origem t ye b ze xe l [T]= r 1 0 0 -(r+l)/2 0 1 0 -(t+b)/2 0 0 1 +(f+n)/2 0 0 0 1 ye (t-b)/2 -(t-b)/2 ze -(r-l)/2 (r-l)/2 xe (f-n)/2 -(f-n)/2 Escala o paralelepípedo de visão no cubo [-1,1]x[-1,1]x[-1,1] ye (t-b)/2 -(t-b)/2 ze xe -(r-l)/2 (r-l)/2 (f-n)/2 near -(f-n)/2 far 2/(r-l) 0 0 0 0 2/(t-b) 0 0 0 0 0 0 [S] = yd 1 1 1 zd far xd -2/(f-n) 0 1 0 near -1 -1 -1 Matriz Frustum do OpenGL [P]= [T]= n 0 0 0 0 n 0 0 0 0 n+f n f 0 0 -1 0 1 0 0 -(r+l)/2 0 1 0 -(t+b)/2 0 0 1 +(f+n)/2 0 0 0 [S T P ] = 1 2n r l 0 0 0 OpenGL Spec [S] = 2/(r-l) 0 0 0 0 2/(t-b) 0 0 0 0 0 0 -2/(f-n) 0 0 1 0 2n t b 0 0 r l r l t b t b ( f n) f n 1 0 0 2 fn f n 0 Projeção Cônica (Frustum) void glFrustum( GLdouble left, GLdouble right, GLdouble bottom, GLdouble top, GLdouble near_, GLdouble far_ ); view frustum ye ze xe camera (eye) Obs.: near e far são distâncias( > 0) top xe ye bottom right left Plano de projeção far near ze ze Projeção Cônica (Perspective) void glPerspective( GLdouble fovy, GLdouble aspect, GLdouble near_, GLdouble far_ ); w ye ze aspect = w/h h xe near far fovy ze xe Matriz Ortho do OpenGL [T]= [S] = 1 0 0 -(r+l)/2 0 1 0 -(t+b)/2 0 0 1 +(f+n)/2 0 0 0 1 OpenGL Spec 2/(r-l) 0 0 0 0 2/(t-b) 0 0 0 0 0 0 -2/(f-n) 0 0 1 Projeção Paralela (Ortho) near top ye far B right top far) bottom ze xe A left right A left bottom near) void glOrtho( GLdouble left, GLdouble right, GLdouble bottom, GLdouble top, GLdouble near_, GLdouble far_ ); void gluOrtho2D( GLdouble left, GLdouble right, GLdouble bottom, GLdouble top ); Glu Look At void gluLookAt(GLdouble eyex, GLdouble eyey, GLdouble eyez, GLdouble centerx, GLdouble centery, GLdouble centerz, GLdouble upx, GLdouble upy, GLdouble upz); Dados: eye, ref, up (definem o sistema de coordenadas do olho) Determine a matriz que leva do sistema de Coordenadas dos Objetos para o sistema de Coordenadas do Olho up eye center Coordenadas dos Objetos Coordenadas do Olho Calcula o sistema - xe ye ze vup eye dados: eye, center, up view y0 view = center - eye center vup ze x0 eye z0 view y0 center x0 z0 ze = – view / ||view|| Calcula o sistema - xe ye ze vup ze xe eye xe = (vup x ze) / ||vup x ze|| view y0 center ye vup x0 xe ze eye z0 view y0 ye center vup ze xe x0 eye view z0 ye = ze x xe Translada o eye para origem ye ze xe eye 1 0 0 -eyex 0 1 0 -eyey [T]= 0 0 1 -eyez 000 1 y0 center y0 ye x0 z0 ze xe eye z0 center x0 Roda xe ye ze para xo yo zo xex xey xez 0 y y y 0 [ R ] = ex ey ez zex zey zez 0 0 0 0 1 y0 ye ze xe eye z0 center ye , yo x0 ze , zo xe , xo Matriz Look At do OpenGL 1 0 0 -eyex 0 1 0 -eyey [T]= 0 0 1 -eyez 000 1 ze = – view / ||view|| xe = (vup x ze) / ||vup x ze|| ye = ze x xe xex xey xez 0 y y y 0 [ R ] = ex ey ez zex zey zez 0 0 0 0 1 [ R T ] =? Concatenação das transformações y0 ye eye [T] [R] ze xe z0 x0 ye ze xe center [P] ye ye ze xe ze eye xe [ T2 ] ye y0 ze center xe [S] x0 z0 ye 1 1 1 ze far xe near -1 -1 -1
Baixar