6LPXODomRGH7UiIHJR8PD([SHULrQFLDFRP5HDOLGDGH9LUWXDO
3DXOR*RQoDOYHV%DUURV -XGLWK.HOQHU
Universidade Federal de Pernambuco, Centro de Informática, CP 7851, 50732-970
Recife, Pernambuco, Brazil
{pgb, jk}@cin.ufpe.br
$EVWUDFW 7UDIILF VLPXODWLRQ LV D ZHOONQRZQ SUREOHP LQ &RPSXWHU 6FLHQFH KDYLQJ EHHQ
DSSURDFKHG LQ PDQ\ GLIIHUHQW ZD\V 7KUHHGLPHQVLRQDO VLPXODWLRQ PRGHOV KDYH EHHQ
GHYHORSHG WR PDNH XVHU QDYLJDWLRQ DQG XVHU LQWHUDFWLRQ ZLWK WKH SUHVHQWHG WUDIILF GDWD
SRVVLEOH 1HYHUWKHOHVV IHZ RI WKHVH PRGHOV DUH H[WHQGHG WR JLYH VXSSRUW WR YLUWXDO UHDOLW\
GHYLFHVDQGWKHRQHVH[WHQGHGKDYHOLPLWHGDSSOLFDELOLW\GXHWRLWVGHSHQGHQFHRQDVSHFLILF
FRPSXWDWLRQDODUFKLWHFWXUH7KHSUHVHQWZRUNDLPVWRDGDSWDWUDIILFVLPXODWLRQPRGHOWRDQ
LPPHUVLYH YLUWXDO UHDOLW\ GHYLFH IRU 3& SUHVHQWLQJ WKH SRVLWLYH DQG QHJDWLYH DVSHFWV RI WKH
UHVXOWLQJPRGHO
5HVXPR6LPXODomRGHWUiIHJRpXPSUREOHPDEDVWDQWHFRQKHFLGRQD&RPSXWDomRMiWHQGR
VLGR DERUGDGR QDV PDLV GLYHUVDV IRUPDV 0RGHORV GH VLPXODomR WULGLPHQVLRQDLV WrP VLGR
GHVHQYROYLGRV SRVVLELOLWDQGR D QDYHJDomR H LQWHUDomR GR XVXiULR FRP RV GDGRV GH WUiIHJR
TXH VmR DSUHVHQWDGRV VLPXOWDQHDPHQWH 3RXFRV GHOHV HQWUHWDQWR VmR HVWHQGLGRV SDUD GDU
VXSRUWHDGLVSRVLWLYRVGHUHDOLGDGHYLUWXDOLPHUVLYDHRVTXHVmRWrPVXDDSOLFDomROLPLWDGD
SRU VHUHP GHVHQYROYLGRV SDUD XPD DUTXLWHWXUD HVSHFtILFD 2 SUHVHQWH WUDEDOKR SURS}H D
DGDSWDomR GH XP PRGHOR GH VLPXODomR GH WUiIHJR D XP GLVSRVLWLYR GH UHDOLGDGH YLUWXDO
LPHUVLYDSDUD3&DSUHVHQWDQGRRVSRQWRVSRVLWLYRVHQHJDWLYRVGRVUHVXOWDGRVREWLGRV
,QWURGXomR
A Realidade Virtual têm sido motivo de satisfação para diversos setores da indústria, permitindo a
visualização e manipulação de objetos e dados complexos através de um modelo tridimensional. Para
isso, utilizam-se dispositivos eletrônicos, como um capacete de Realidade Virtual ou uma CAVE
[Frery et al. 2000]. A aplicação desse mesmo conceito na área de trânsito produziria, então, uma
perspectiva mais abrangente no desenvolvimento de novas soluções para o planejamento urbano.
Mesmo com as novas técnicas e ferramentas disponíveis na engenharia e na matemática, prever
o tráfego de uma pista antes dessa ser construída é uma tarefa complexa. Com o computador, o
planejamento urbano pôde ser feito com um maior grau de certeza. Mas nenhuma ferramenta
computacional que seja do nosso conhecimento é capaz de abarcar todas as variáveis envolvidas numa
simulação do trânsito.
O restante deste artigo está dividido da seguinte forma. A seção 2 define o objetivo dessa
pesquisa. A seção 3 descreve o contexto dessa área de pesquisa. A seção 4 apresenta o modelo de
simulação. A seção 5 traz a metodologia de desenvolvimento empregada. A seção 6 enumera os
resultados obtidos. A seção 7 apresenta as conclusões sobre o trabalho e traça uma perspectiva sobre
trabalhos futuros.
2EMHWLYR
A motivação para este trabalho vem do fato da inexistência de ferramentas de simulação de tráfego que
utilizem interfaces de Realidade Virtual. A passagem de uma aplicação para um ambiente
tridimensional imersivo possibilita não só uma melhor visualização dos dados apresentados, como
também a possibilidade de análise de outros dados, tarefa impossível ou, ao menos, difícil, se fossem
utilizadas interfaces bidimensionais comuns.
O objetivo desse trabalho é testar a viabilidade de uma aplicação de trânsito utilizando
dispositivos de Realidade Virtual imersiva. Especificamente, pretende-se construir um modelo para
simulação de alagamento em rodovias e para percepção do seu efeito sobre o fluxo de veículos.
A simulação do tráfego da região do Complexo de Salgadinho será utilizada com o propósito de
discutir essa viabilidade e os benefícios obtidos ao se empregar esse tipo de tecnologia na solução de
problemas dessa magnitude. Espera-se que, de uma forma mais geral, este trabalho também possibilite
um melhor esclarecimento do uso da Realidade Virtual na busca de novas soluções para problemas de
nosso cotidiano, independentemente de seu grau de complexidade.
&RQWH[WR
Atualmente, inúmeros são os grupos de pesquisa e as empresas que estão desenvolvendo software na
área de simulação de tráfego. Uma pesquisa realizada por um deles, o ITS (Institute for Transport
Studies), na Universidade de Leeds, Reino Unido [ITS 2000], revela 57 ferramentas produzidas para
lidar com situações de tráfego das mais variadas formas. Elas podem ser classificadas, basicamente, em
4 grupos: modelos urbanos que simulam situações em áreas internas às cidades, modelos rodoviários
que simulam vias de alta velocidade na periferia das cidades, modelos mistos que tentam fundir os dois
modelos anteriores e modelos de auto-estrada, utilizados para teste de veículos e sistemas de transporte
e viagem autônomos.
De uma forma geral, os modelos possuem características comuns. A primeira delas é que quase
todos têm seu tempo baseado em unidades discretas, intervalos de um segundo. Uma segunda é a
definição da rota dos veículos, especificando-se os pontos de origem e destino. No método tradicional,
os pontos intermediários desse caminho são escolhidos de acordo com o percentual que a quantidade de
veículos que passam em cada um desses pontos corresponde no fluxo de saída de um ponto anterior no
percurso ao qual estão ligados. A divisão do fluxo de veículos que passa no ponto anterior a uma
bifurcação se divide, então, entre uma pista e outra com base nesses percentuais.
Quanto à interface gráfica, alguns já utilizam visualização tridimensional [Seneviratne 2001].
Porém, não foi encontrado nenhum modelo que utilizasse Realidade Virtual, excetuando-se
simuladores para treinamento de motoristas e pilotos.
Com relação à Realidade Virtual, os modelos estão cada vez mais realistas, sejam através do
emprego de motores de jogos no processamento dos ambientes [DeLeon e Berry 2000], seja pela
definição de novas e aprimoradas técnicas de nível de detalhe [ De Floriani e Magillo 2002], [BenMoshe et al. 2002]. Entretanto, desconsiderando-se sua participação no treinamento através de modelos
de simulação em cabines de avião, veículo [Mukai 1998] ou trem, essa área de pesquisa não tem
contribuído na busca de soluções para o problema do trânsito.
Outras características podem ainda ser avaliadas como tráfego diferenciado[Liu et al. 2000],
semáforos, comportamento e fluxo de veículos[Liu e Tate 2000], calibragem e validação dos modelos,
entre outras.
0RGHORGH6LPXODomR
Simular fluxo de veículos e alagamento nas pistas através de modelos tridimensionais com interfaces
de Realidade Virtual é uma experiência nova e que requer planejamento antes de ser posta em prática.
Entretanto, dentro do contexto acima descrito, pode-se enquadrar o modelo proposto como do tipo
“rodoviário”, por conta das características do modelo, apresentadas a seguir.
O tempo de execução da simulação está limitado apenas à taxa de quadros processada pelo
computador, característica fundamental para proporcionar o realismo necessário ao uso de
equipamentos de Realidade Virtual.
O modelo se baseia em dados geográficos obtidos por trabalho de campo e leitura de cartas
topográficas com o apoio do grupo de Realidade Virtual do CIn-UFPE. A aplicação de níveis de
detalhe a objetos do modelo é feita através das funcionalidades da ferramenta de simulação, o WorldUp [Engineering Animation, Inc. 1997-2000].
A visualização é feita por pontos de vista dos motoristas, por pontos de vista pré-definidos e
pela navegação com orientação fixa. A implementação foi facilitada pelo World-Up, como durante o
acoplamento de viewpoint: ponto de vista do usuário (TetherViewpoint) [Engineering Animation, Inc.
1997-2000]. A interface proposta é tridimensional e imersiva.
A região escolhida para modelagem foi a do Complexo de Salgadinho, localizada no Recife,
PE, Brasil. O motivo é o fato de suas vias permitirem uma velocidade média alta e possuírem poucos
semáforos. Além disso, a região é banhada por um rio, um canal, uma lagoa e está localizada na costa,
favorecendo alagamento. Modelos de simulação de alagamento já foram criados no Centro de
Informática da UFPE [Frery et al. 2000] utilizando a linguagem Java e extraindo dados de DEMs (data
elevation models).
As rotas do modelo são geradas pelo método tradicional e de uma única vez antes do veículo
percorrê-la. Um veículo só pára ao encontrar seu ponto de destino.
A velocidade máxima de cada veículo é fixa e a mudança de faixas se dá de forma aleatória e
entre trechos de pista. Existem parâmetros iniciais configuráveis por leitura de arquivo, mas dados são
visualizados apenas através do comportamento dos veículos.
Por fim, o funcionamento da movimentação dos veículos se dá através de algoritmos de vida
artificial para jogos [Reynolds 1999], e através de funcionalidades da ferramenta de simulação utilizada
[Engineering Animation, Inc. 1997-2000].
Esse projeto é a continuação de um outro trabalho de iniciação científica desenvolvido no
período de agosto 2001 a julho 2002, durante o qual foram realizados testes iniciais com movimentação
de veículos e foi desenvolvida a versão inicial do terreno da região do Complexo de Salgadinho.
0HWRGRORJLD
Para melhor entendermos a metodologia utilizada nesse trabalho, essa seção foi dividida de acordo com
os principais passos tomados durante o seu desenvolvimento.
$GDSWDomRGDVSLVWDVDRUHOHYR
A adaptação das vias de tráfego da região foi realizada através da ferramenta de modelagem gráfica 3D
Studio Max. As pistas foram extraídas de uma ortofotocarta (mapa composto de foto aérea da região,
curvas de nível e pontos definindo alturas de locais específicos) manualmente, utilizando as
funcionalidades da ferramenta de edição de imagens CorelPhotopaint.
A partir do mapa digitalizado, essas pistas foram destacadas em branco. Através de ajustes de
contraste e limpeza de ruídos, a imagem foi convertida para tons de cinza. Ela sofreu inversão de cores
e foi transformada para o formato vetorial DXF. Importando-se o arquivo para o 3D Studio Max, foram
removidos mais ruídos e trechos e a continuidade das pistas foi ajustada. Em seguida, as pistas foram
adaptadas ao relevo. Primeiramente, foi adicionado volume às pistas através do comando loft.
Em segundo lugar, ajustou-se a altura das pistas ao relevo. Isso foi feito através de operações
booleanas entre as pistas e a superfície do terreno. O resultado de cada operação era um trecho de pista
formado por polígonos recortados da superfície da região, um objeto sem volume. A adição de volume
se deu com o comando de extrusão. A técnica trouxe vantagens, pois reduziu o número de polígonos
nos trechos de pista.
As pistas também acompanharam o relevo dos leitos dos rios e das áreas alagadas, sendo
necessário um ajuste manual na criação de pontes. Da mesma forma, a altura dos viadutos não pode ser
automaticamente obtida da ortofotocarta.
$SOLFDomRGH/2'DRUHOHYRGR&RPSOH[RGH6DOJDGLQKR
Para que o processamento durante a simulação fosse reduzido, empregou-se a técnica de LOD (Level
Of Detail). Não foi possível aplicar essa técnica nas pistas, pois gerou falhas de continuidade em seus
trajetos. Além disso, impossibilitou a simulação de alagamento com precisão, pois as pistas teriam suas
alturas variando.
O relevo foi dividido em 35 quadrantes isométricos e complementares utilizando-se o comando
de interseção do 3D Studio Max. Foram definidos oito LODs (LOD0 a LOD7), gerados também no 3D
Studio Max. Apenas quatro desses oito LODs foram utilizados. O total de polígonos pode ser
observado na Tabela 5. 1.
Tabela 5. 1: Níveis detalhe do terreno e suas quantidades de polígonos.
Nível de detalhe
Número de polígonos
LOD 0
51276
LOD 2
14290
LOD 4
11348
LOD 6
3071
Pelo fato dos quadrantes construídos serem complementares no relevo, a borda entre eles se
tornou perceptível quando dois ou mais quadrantes adjacentes se encontravam em níveis de detalhe
diferentes.
A solução foi ampliar a abrangência do quadrante, dando interseção a suas bordas. Cada aresta
lateral sofreu um aumento de 20% em seu tamanho (percentual esse obtido empiricamente), resultando
num aumento de 44% da área total. A criação dessa borda gerou um aumento no número de polígonos
em cada quadrante numa média de 31,75%, como visto na Tabela 5.2, mostrada a seguir:
Tabela 5. 2: Aumento percentual do número de polígonos no relevo após ampliação do
tamanho dos quadrantes.
Nível
de detalhe
Quadrantes
complementares
(número de
polígonos)
Quadrantes com
aumento de borda (número de
polígonos)
Percentual de
aumento no número de
polígonos
LOD 0
51276
69390
35,23
LOD 2
14390
20 0 68
39,45
LOD 4
11348
13999
23,36
LOD 6
30 71
3966
29,14
Total
80 0 85
10 7423
34,13
$XPHQWRVPpGLRVFRQVLGHUDQGRRSHUFHQWXDOGRV/2'V
H
31,75
Na verdade, no modelo visto pelo usuário, esse percentual de aumento é bem menor. Cada
quadrante possui aproximadamente 40 unidades de dimensão lateral (u.d.). Seus centros de
posicionamento estão localizados nos centros de massa de suas caixas de contorno(: Do inglês
bounding box, consiste na representação da estrutura do menor paralelepípedo capaz de envolver um
objeto tridimensional). Com o aumento das arestas, sua dimensão é modificada para 48 u.d. Então, o
valor da distância entre seu centro de massa e um de seus vértices, por Pitágoras, é de (48 x 1.41)/2 §
34. Isso indica a distância máxima que o ponto de vista do usuário pode estar do centro do quadrante,
se dentro de sua área. O quadrante necessita manter seu valor máximo de detalhe quando isso ocorrer,
para que o usuário perceba os efeitos do alagamento na área onde se encontra. Considerando isso e as
distâncias entre os centros de massa de cada quadrante, definiu-se distâncias para cada nível de detalhe,
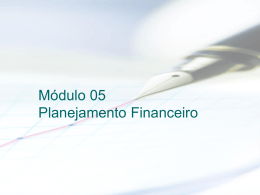
vistas na Figura 5. 1.
LOD 0 : de 0 a 38 u.d.
LOD 2: de 38 a 78 u.d.
LOD 4: de 78 a 118 u.d.
LOD 6: a partir de 118 u.d
Ponto de vista do usuário.
Figura 5. 1: Exemplo de situação onde se obtém o relevo com maior número de polígonos
(legenda com distâncias entre diferentes de níveis de detalhe).
A situação com maior número de polígonos é uma semelhante à da Figura 5. 1, onde se tem 4
quadrantes com LOD 0, 12 com LOD 2, 14 com LOD 4 e 5 com LOD 6. Dessa forma, o cálculo do
número médio de polígonos por quadrante fica sendo:
((35,23 x 4) + (39,45 x 12) + (23,36 x 14) + (29,14 x 5))/35 = (140,92 + 473,4 +
327,04 + 145.7)/35 = 31.05
Esse resultado foi ainda mais otimizado, reduzindo-se a diferença entre níveis de detalhe, como
pode ser observado na Tabela 5. 3.
Tabela 5. 3: Valores finais das distâncias entre LODs.
Nível
de detalhe
Distâncias de ativação
LOD 0
Entre 0 e 38 u.d.
LOD 2
Entre 38 e 58 u.d.
LOD 4
Entre 58 e 78 u.d.
LOD 6
A partir de 78 u.d.
,QVHUomRGH)RQWHVGHÈJXD
Durante a definição do relevo, apenas duas fontes de água disjuntas foram encontradas na região: a
primeira, formada pelo mar e pelos rios e a segunda, um lago entre as pistas. Cada fonte é constituída
por um plano recortado, cuja área é um pouco maior que a capaz de representar a superfície da água
dessa fonte ao nível do mar.
Não foi possível definir precisamente o nível do mar após a passagem do modelo da ferramenta
de modelagem (3D Studio Max) para a ferramenta de simulação (World-Up), devido à
incompatibilidade no formato de dados. Os ajustes de nível de água foram estabelecidos visualmente
no modelo. As áreas alagadas foram ajustadas até que se assemelhassem às existentes na região. Tais
ajustes foram feitos manualmente no World-Up. A variação na altura desses planos define, então, o
nível de água nas fontes.
,QVHUomRGRVSUpGLRVGDUHJLmR
A fim de prover um maior grau de realismo, os principais prédios da região foram inseridos no modelo.
São eles: uma parte do Centro de Convenções de Pernambuco e do parque de Salgadinho. A construção
se deu através de modelos tridimensionais do 3D Studio Max com dimensões aproximadas. Cada
modelo possui dois níveis de detalhe.
$GDSWDomRGHYHtFXORVjVSLVWDVGR&RPSOH[RGH6DOJDGLQKR
Para que os veículos sigam as pistas, é preciso definir um conjunto de pontos de trajetória. Esses pontos
definirão para onde o veículo deve seguir a cada momento da simulação. Cada ponto poderá ter mais de
uma faixa, de acordo com a largura da pista. Os veículos são representados por dois níveis de detalhe,
de acordo com a distância que o ponto de vista do usuário se encontra deles.
7LSRVGH3RQWRV
Os pontos estão definidos em posições-chave da pista e podem ser dos seguintes tipos:
o 3RQWRVGHHQFUX]LOKDGDV onde dois ou mais trechos de pista se encontram. Nesses lugares,
o veículo pode mudar ou não de faixa. São de três tipos:
o 3RQWRVGHHVFROKDGHGLUHomR trecho de pista com tráfego unidirecional é dividido em duas
ou mais rotas distintas;
o 3RQWRV GH IXVmR GH IOX[R XQLGLUHFLRQDO trecho de pista com tráfego unidirecional sofre
fusão a outro com fluxo de tráfego unidirecional de mesmo sentido;
o 3RQWRV GH IXVmR GH IOX[R XQLGLUHFLRQDO ELGLUHFLRQDO: um trecho de pista com tráfego
unidirecional sofre fusão a outro com fluxo de tráfego bidirecional.
2EVHUYDomR É impossível a fusão no sentido inverso (bidirecional XQLGLUHFLRQDO 2 PHVPR
ocorre com trechos de pistas bidirecionais. Ambos os casos só são possíveis com a inserção de
semáforos no local.
• 3RQWRVGHUHILQDPHQWRGHPRYLPHQWR: quando apenas dois pontos não são suficientes para
definir um trecho de pista (em curvas fechadas, por exemplo), é necessário inserir outros
que complementem a trajetória, para que os veículos, que seguem em linha reta, não
saiam da pista;
• 3RQWRVGHHQWUDGDGHWUiIHJR: locais onde os veículos poderão ser iniciados. Não estão na
lista dos pontos de trajetória dos veículos;
• 3RQWRVGHVDtGDGHWUiIHJR: correspondem ao destino final dos veículos. São os últimos da
lista de pontos de cada veículo;
Os pontos escolhidos totalizaram 115 em todo o trajeto. Alguns pontos de refinamento foram
posicionados em duplas em ruas de duas mãos, cada ponto representando um sentido da rua, para
simplificar o algoritmo de decisão de trajetória.
&ROHWDGH'DGRVGH)OX[R
A coleta de dados de fluxo foi realizada em 17 pontos estratégicos durante um mesmo horário em 2
dias comerciais. Ela foi restrita a um período de aproximadamente uma hora por dia, das 9:00 às 10:00
da manhã. Os dados coletados foram transferidos para um arquivo texto que foi então lido pelo modelo
de simulação para configurar o grafo que conecta os 115 pontos.
'HILQLomRGHSRQWRVGHYLVWD
O usuário possui três modos de configuração do ponto de vista acessíveis pelo teclado. No primeiro, o
usuário tem a possibilidade de navegar com seu avatar (entidade que representa o usuário no mundo
virtual) por pontos de vista fixos em diferentes locais do mapa. No segundo modo, o usuário pode
navegar controlando a posição do avatar do usuário através das setas do teclado. No último, o avatar
fica acoplado a um dos veículos e o acompanha. O usuário pode mudar para quaisquer dos veículos
ativos. Quando o veículo onde o usuário está acoplado é desativado, ele é acoplado ao primeiro veículo
presente na lista dos veículos ativos.
(VWUXWXUDGHFODVVHV
Pelo fato da simulação ter sido programada na linguagem disponível no World-Up, não foi possível o
desenvolvimento de uma estrutura de classes bem agregada. Isso advém do fato da linguagem
funcionar por meio de definição de scripts (arquivo texto contendo rotinas para execução de alguma
função durante a simulação), onde módulos são chamados seqüencialmente num mesmo quadro
(frame). Quando carregado, o modelo de simulação é configurado através de um script de inicialização.
A partir daí, a simulação entrará em funcionamento, executando quaisquer outros scripts ou comandos.
A cada quadro de simulação, quatro atividades deverão ser realizadas:
•
•
•
$WXDOL]Do}HVEiVLFDVfeitas através de funcionalidades do World-up.
$WXDOL]DomRGRVHVWDGRVGRVYHtFXORV$(9.: o próximo ponto que cada veículo seguirá
é atualizado e veículos são retirados ou adicionados à simulação;
$WXDOL]DomR GR HVWDGR GR DYDWDU GR XVXiULR $($8 Baseado em comandos do
usuário, o ponto de vista e a posição do seu avatar são ajustados. Qualquer outro comando
dado pelo usuário também será verificado nesta etapa;
•
$WXDOL]DomR GDV SRVLo}HV GRV YHtFXORV $39 a partir de sua massa, aceleração e
velocidade máxima e destino, os algoritmos de vida artificial deslocam cada veículo.
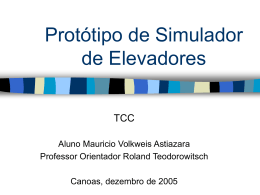
No fim da simulação, um script de finalização é chamado. No caso desse modelo, esse script
não faz nada. Assim, o modelo de simulação pode ser dividido em seis módulos, três deles gerenciados
por um módulo que definirá a ordem de execução. A arquitetura pode ser vista na Figura 5. 2.
Ferramenta de Simulação World-Up
Configurações
Iniciais
Atualizações
Básicas
Módulo
A.E.V
Módulo
A.E.A.U
Módulo
A.P.V
Configurações
Finais
Figura 5. 2: Arquitetura básica do modelo de simulação.
&RQILJXUDo}HV,QLFLDLV
Ocorre a leitura dos dados de tráfego e sua associação com os 115 pontos. Os veículos são criados,
posicionados num local padrão fora do relevo e inseridos na lista de veículos inativos. As
configurações iniciais do avatar do usuário serão feitas.
$WXDOL]Do}HV%iVLFDV
Esse módulo, na verdade, não existe. É uma abstração das funcionalidades utilizadas na simulação, já
implementadas no World-Up. São elas: TerrainFollowLand que permite que um objeto siga as
irregularidades da superfície de outro objeto, TetherViewpoint que acopla o ponto de vista do usuário a
um objeto e LOD - Level of Detail que permite a definição de versões de um mesmo objeto com
número de polígonos diferentes, apresentadas uma a uma de acordo com a distância entre ele e o avatar
do usuário.
0yGXOR$(9
,QLFLDOL]DomRGRYHtFXORFRPQRYDWUDMHWyULD
A rota de tráfego de um veículo é definida com base nos dados de fluxos obtidos. O primeiro
passo é a definição do ponto de largada do veículo. Cada ponto de entrada possui um valor de fluxo de
veículos por minuto, V, e uma lista de veículos a ativar. A cada minuto, o ponto de entrada terá sua lista
adicionada de V novos veículos retirados da lista de veículos inativos, enquanto essa última lista não
estiver vazia.
A cada novo veículo inserido é dado um tempo aleatório entre 0 e 60, dentro do minuto de
simulação corrente. Quando esse tempo é alcançado, o veículo sai da lista de veículos a ativar do seu
ponto de entrada e entra na lista dos veículos ativos. A escolha da seqüência de preenchimento da lista
dos pontos de entrada se dá na mesma ordem que a da leitura do arquivo texto na definição das
características dos pontos. A escolha da faixa do ponto inicial acontece de forma aleatória e
homogênea. O veículo é, então, posicionado no modelo. As velocidades inicial e máxima, bem como a
massa de cada veículo, foram definidas aleatoriamente, baseadas no valor médio dessas características
em veículos utilitários vendidos atualmente no mercado.
O próximo passo é a formação da lista de faixas da trajetória do veículo, baseada na técnica
tradicional de escolha com base em probabilidades[Seneviratne 2001]. Feito isso, o veículo se encontra
pronto para entrar na simulação. Mudanças aleatórias de faixas não ocorrem em pontos de refinamento,
para reduzir o caos no trânsito.
$WXDOL]DomRGRSUy[LPRQyDTXHRYHtFXORGHYHVHGLULJLU
Comparando a distância d entre o veículo e sua faixa de destino e a distância mínima dm
definida para esse ponto, o módulo A.E.V. decide se o veículo deve perseguir o próximo ponto da
trajetória. Se d for menor que dm, o veículo deve seguir outro ponto.
9HULILFDomRGHFKHJDGDDRGHVWLQRILQDOHILQDOL]DomRGRYHtFXOR
Se o ponto for o último do percurso, o veículo vai para uma posição “oculta” padrão, é
desativado e posto na lista de inativos, esperando para entrar novamente na simulação. Assim, os
veículos poderão estar ativos e se movimentando pelas pistas do modelo ou inativos e “escondidos” na
cena, aguardando serem inseridos na simulação.
0yGXOR$39
$WXDOL]DomRGDSRVLomRGRYHtFXOREDVHDGRQRSRQWRGHGHVWLQRGDWUDMHWyULD
Equivale ao algoritmo de pathfollow, apresentado em [Reynolds 1999]. O módulo ainda
desenha uma linha verde indicando seu ponto de destino atual e uma linha azul representando a sua
posição futura.
&iOFXORGDFROLVmRHQWUHYHtFXORV
O móvel é colocado em sua posição anterior, caso haja colisão entre seu pára-choque com a
lataria de outro veículo na posição atual.
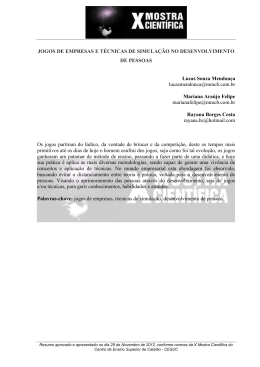
&iOFXORGDIRUoDGHVHSDUDomRHQWUHYHtFXORV
Como forma de evitar colisão, esse módulo implementa a técnica de separation, descrita em
[Reynolds 1999] Esse módulo também afasta os veículos de pistas alagadas como apresentado na
Figura 5. 3. Ocorre a aplicação de uma força repulsiva Fra ao veículo contrária à fonte de água quando
uma roda toca a superfície da fonte. A direção da força é perpendicular à reta r que passa pelo ponto de
destino anterior pa e pelo ponto pfa, a posição da fonte de água. O sentido da força é oposto ao do vetor
formado pela projeção pr da posição p do móvel na reta r e por p. O módulo de Fra é diretamente
proporcional ao quadrado da distância d entre a altura da roda e a da superfície da água.
Figura 5. 3: Ajuste da posição do móvel utilizando o algoritmo de separation para fontes de
água.
$MXVWHGRVYHtFXORVDRUHOHYR
Cada veículo possui um objeto nivelador em cada roda. Enquanto o veículo se movimenta,
esses objetos são ajustados à altura do terreno, para isso utilizando a funcionalidade
TerrainFollowLand do World-Up. A partir da altura desses quatro objetos, o módulo A.P.V. ajusta a
orientação do móvel às nuances do relevo. Posteriormente, esses objetos niveladores passaram a
acompanhar a superfície da pista.
0yGXOR$($8
2EWHQomRGHFRPDQGRVGRWHFODGR
Obtém quaisquer comandos de entrada e atualiza o estado da simulação baseado neles.
$WXDOL]DomRGHHVWDGRGRYLHZSRLQW
Atualiza a posição e o estado do viewpoint de acordo com comandos do usuário no teclado que podem
ser vistos em [Barros 2002]. A visualização do modelo foi feita através de óculos de Realidade Virtual
acoplados ao ponto de vista do usuário.Um tracker (rastreador de movimentos do usuário. Nesse
modelo ele capta a rotação da cabeça do usuário nos três eixos e a aplica ao viewpoint) com 3ºL (3
graus de liberdade) captou as rotações da cabeça do usuário nas três dimensões.
5HVXOWDGRV([SHULPHQWDLV
Abaixo, seguem os resultados experimentais obtidos com esse trabalho até o momento em que esse
artigo foi escrito.
O relevo foi criado e inserido no modelo. A aplicação de nível de detalhe por quadrantes
reduziu a carga no processamento do modelo. As pistas foram criadas e os viadutos e pontes erguidos.
Todo processo foi feito através da ferramenta 3D Studio Max e do World-up. Não foram aplicadas
texturas aos veículos e prédios, mas ambos utilizam dois níveis de detalhe.
A grande maioria dos algoritmos de vida artificial [Reynolds 1999] funcionou com sucesso. O
algoritmo original de pathfollow foi alterado para que funcionasse com a nova estrutura de pontos
definida. O algoritmo separation passou a ser responsável também pelo ajuste da posição dos veículos
com base nas fontes de água, estando em fase de finalização. Os pontos de vista do usuário foram
implementados. Alguns scripts foram alterados para funcionar apenas com veículos ativos.
Os dados de fluxo foram inseridos no modelo. A simulação funcionou com 10 veículos, apesar
de que ferramenta de simulação não apresentava objetos da cena dependendo do ângulo de visão. Para
a pista, o motivo para esse problema é, provavelmente, o fato de ela ser um único objeto com um alto
número de polígonos. Não foi encontrada até o presente uma solução para esse problema. O número de
veículos ficou restrito a 10 por conta da alta carga computacional.
Os modelos de prédio e as fontes de água foram posicionados e suas dimensões ajustadas
manualmente. O nível de água foi regulado da mesma forma. O tracker e os óculos estéreos foram
adaptados à interface do modelo, tornando-a mais imersiva.
&RQFOXV}HVH7UDEDOKRV)XWXURV
Esse artigo apresentou uma abordagem para simulação de fluxo rodoviário. Basicamente, foram
discutidos: o modo de extração e a transferência dos dados de uma carta topográfica para um modelo
tridimensional, a adaptação das pistas da região, a aplicação da técnica de níveis de detalhe (LOD),
além de técnicas de simulação de tráfego, algoritmos de vida artificial e especificação de pontos de
vista para o usuário. Com base nos resultados apresentados, fica evidente a possibilidade de criação de
ferramentas simples e eficazes de simulação de tráfego utilizando Realidade Virtual imersiva. Dados
como: nível de poluição, velocidade média, quantidade de acidentes e tipo de tráfego poderiam ser
certamente mapeados a um modelo similar ao apresentado e analisados de maneira mais aprofundada e
realista num modelo com interface de Realidade Virtual.
Contudo, é necessária cautela na construção de modelos desse tipo. A grande quantidade de
dados a ser processada numa simulação de tráfego, aliada à também razoável quantidade de polígonos
pertencentes ao modelo tridimensional pode gerar uma carga de processamento excessiva e tornar sua
modelagem inviável. A aplicação de conceitos como nível de detalhe nos objetos se torna, então,
fundamental na eficácia de visualização da simulação do modelo em tempo real.
O maior problema durante o desenvolvimento do presente trabalho foi à visualização da reação
do tráfego à alteração do nível de água das fontes por conta da incompatibilidade de formatos. Um
segundo problema foi adaptar as pistas à simulação, não podendo essas ter níveis de detalhe e tornando
a simulação lenta. Um outro problema foi a grande quantidade de trabalho manual na obtenção de
dados para o modelo. Isso mostra que a automatização de tal processo, se possível, é não-trivial.
Apesar do modelo estar funcionando com razoável precisão, ele ainda se encontra com alguns
problemas, tais como: precisa otimizar as estruturas de dados no consumo de memória; os algoritmos
precisam revisões, para se tornarem mais eficientes; a inserção de um joystick no modo de navegação
livre facilitaria o uso da interface de Realidade Virtual; entre outras.
A adição de novas funcionalidades poderia ser realizada, com o objetivo de tornar o modelo
mais eficiente do ponto de vista do usuário, entre elas podemos citar: a adição de semáforos, ciclistas e
pedestres; permissão para os veículos estacionarem, diferenciação entre veículos de transporte público
e os demais; definição do consumo de gasolina e emissão de poluentes; adição de mais dados e prédios
da região.
Como último passo, a expansão do modelo para uma ferramenta mais genérica seria o ideal. O usuário
poderia criar vias de tráfego ou importá-las (se as vias de tráfego já existirem na região) e definir o
fluxo para cada uma delas. Semáforos poderiam ser incluídos e faixas acrescentadas. Seria possível
simular alagamento e a reação do trânsito, apontando para possíveis remodelagens na estrutura de
tráfego. O modelo final poderia ser exportado para VRML e visualizado através da Internet.
5HIHUrQFLDV
[Barros 2002] Barros, P.G., Simulação de Tráfego com Realidade Virtual, trabalho de graduação em
Ciência da Computação, UFPE, Brasil, 2002. URL: http://www.cin.ufpe.br/~tg/2002-2/
[Ben-Moshe et al. 2002] Ben-Moshe B., Katz M., Mitchell J. e Nir Y., Visibility Preserving Terrain
Simplification -An Experimental Study, Em: 3URFHHGLQJVWK$QQXDO$&06\PSRVLXPRQ
&RPSXWDWLRQDO*HRPHWU\, p. 303-311, Junho 2002.
[DeLeon e Berry 2000] DeLeon V., Berry R., Bringing VR to the Desktop: Are You Game?, ,(((
0XOWLPHGLD, edição de Abril-Junho, 2000, (Vol. 7, No. 2), pp. 68-72.
[De Floriani e Magillo 2002] De Floriani L., Magillo P., Regular and Irregular Multi-Resolution
Terrain Models: a Comparison, Em: 3URFHHGLQJVWK$&0,QWHUQDWLRQDO6\PSRVLXPRQ$GYDQFHVLQ
*HRJUDSKLF,QIRUPDWLRQ6\VWHPV, p. 143 - 148, ISBN: 1-58113-591-2, 2002.
[Engineering Animation 1997-2000] Engineering Animation, Inc., “ World-Up R5 User’s Guide” ,
1997-2000.
[Frery et al. 2000] Frery, A.C., Kelner, J., Moreira, J. R., Pessoa, B. D. S., Alheiros, D. M., Araujo
Filho, M. S. C., Teichrieb, V. Desktop Virtual Reality in the Assessment of Tidal Effect. Em:
3URFHHGLQJVRIWKHWK,QWHUQDWLRQDO*HRVFLHQFHDQG5HPRWH6HQVLQJ, 2000.
[ITS 2000] Institute for Transport Studies, SMARTEST - Final Report for Publication 2000, University
of Leeds, Reino Unido, financiado pela Comissão Européia sobre o Projeto Transport RTD Programme
do 4th Framework Programme, Janeiro, Número de contrato: RO-97-SC.1059.
[Liu et al. 2000] Liu R, Clark S.D., Montgomery F.O. e Tate J., The Microscopic Modelling of Kerb
Guided Bus Schemes, Em: 7UDQVSRUW5HVHDUFK%RDUG$QQXDO&RQIHUHQFH, Washington, 2000.
[Liu e Tate 2000] Liu, R. and Tate, J., MicroSimulation Modeling of Intelligent Speed Adaptation
System, Em: (XURSHDQ7UDQVSRUW&RQIHUHQFH, Cambridge, Setembro 2000.
[Mukai 1998] Mukai T., Virtual Reality System for Traffic Environment Simulation, resumo do IPSJ
JOURNAL Vol.39 No.01, p. 015, 1998.
[Reynolds 1999] Reynolds, C. W., Steering Behaviors for Autonomous Characters, Em: Proceedings
of Game Developers Conference, Miller Freeman Game Group, San Francisco, California, p. 763-782,
1999.
[Seneviratne 2001] Seneviratne P., Access Traffic Simulation Model (ACTSIM), relatório final do
projeto 78 do ITS-IDEA, Intelligent Transportation Systems Program, Universidade do Estado de
Utah, Logan, UT, Novembro, 2001.
[Taplin 1999] Taplin, Simulations Models of Traffic Flow, Em: The 34th Annual Conference of the
Operational Research Society of New Zealand, Universidade de Waikato, Hamilton, New Zealand,
Dezembro, 1999.
Download