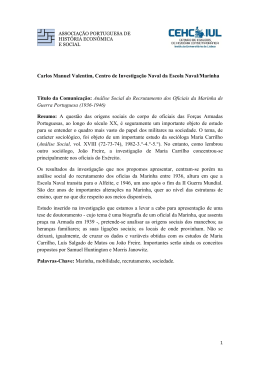
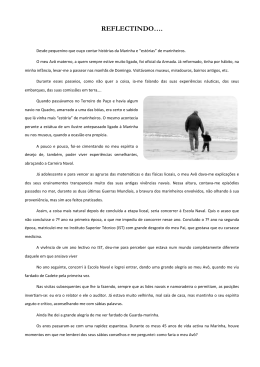
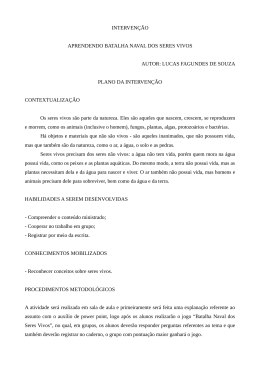
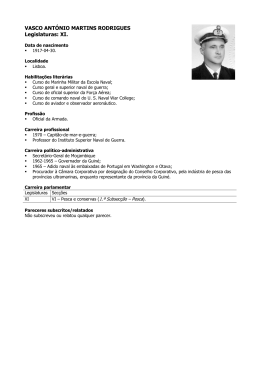
SECRETARIA DE CIÊNCIA, TECNOLOGIA E INOVAÇÃO DA MARINHA Revista Pesquisa Naval Número 22 – Ano 2009 Brasília – 2009 ISSN 1414-8595 REVISTA PESQUISA NAVAL COMISSÃO EDITORIAL (“Referees”) PATROCÍNIO SECRETARIA DE CIÊNCIA, TECNOLOGIA E INOVAÇÃO DA MARINHA – SecCTM Dr. Alex Cardoso Bastos - UFES Dr. Alexandre Ricardo Soares Romariz - UnB Dra. Andrea Lago da Silva - UFSCar Dr. Armando de Azevedo Caldeira Pires - UnB Dr. Artur de Jesus Motheo - USP Dr. Benjamín René Callejas Bedregal - UFRN Dr. Carlos Barros Montez - UFSC Dr. Davies William de Lima Monteiro - UFMG Dr. Edmo José Dias Campos - USP Dr. Eduardo Augusto Bezerra - UFSC Dr. Elcio Hideiti Shiguemori - IEAv Dr. Ettore Apolônio de Barros - EPUSP Dr. Fabiano Passuelo Hessel - PUCRS Dra. Graçaliz Pereira Dimuro - FURG Dr. José Antonio Malmonge - UNESP Dr. Luiz Flávio Autran Monteiro Gomes - IBMEC/RJ Dr. Márcio Luiz de Andrade Netto - UNICAMP Dr. Marco Antonio Grivet Mattoso Maia - PUC-RIO Dr. Marco Aurélio Amaral Henriques - UNICAMP Dr. Marco Aurélio Spohn - UFCG Dr. Marco Túlio Carvalho de Andrade - EPUSP Dr. Marcos do Couto Bezerra Cavalcanti - UFRJ Dra. Maria Augusta Soares Machado - IBMEC Dr. Mehran Misaghi - SOCIESC Dr. Newton Cesario Frateschi - UNICAMP Dr. Orlando José Tobias - FURB Dr. Roberto Koji Onmori - EPUSP Dra. Silmara das Neves - USF Dr. Victor Dmitriev - UFPA Dr. Vinícius Medina Kern - UFSC/IS EDITOR-CHEFE V Alte NEY ZANELLA DOS SANTOS Secretário de Ciência, Tecnologia e Inovação da Marinha EDITORES ADJUNTOS C Alte (EN) MAURILLO EUCLIDES FERREIRA DA SILVA Diretor do Instituto de Pesquisas da Marinha – IPqM C Alte MARCOS NUNES DE MIRANDA Diretor do Instituto de Estudos do Mar Almirante Paulo Moreira – IEAPM C Alte LISEO ZAMPRONIO Diretor do Centro de Análises de Sistemas Navais – CASNAV CONSELHO EDITORIAL CMG ODILON LEITE DE ANDRADE NETO CF (EN) CARLOS MAX MARTINS PIMENTEL CF (EN) EMILSON GONÇALVES PAULO CF (T) SÉRGIO ALEXANDRE C. DE LIMA CASTRO 2º SG-ED SUED DE SOUZA LIMA EVANGELISTA EDIÇÃO SECRETARIA DE CIÊNCIA, TECNOLOGIA E INOVAÇÃO DA MARINHA – SecCTM REVISÃO ORTOGRÁFICA E NORMALIZAÇÃO DE REFERÊNCIAS Profª VALÉRIA F. DE NEGRI – FGV/RJ Profª Mª ALICE COELHO – SME/RJ CAPA Logomarca do Núcleo de Inovação Tecnológica da Marinha – NIT-MB. A Revista Pesquisa Naval tem como missão proporcionar à comunidade científica um canal formal de comunicação e de disseminação da produção técnico-científica nacional, por meio da publicação de artigos originais que sejam resultados de pesquisas científicas e que contribuam para o avanço do conhecimento nas áreas de interesse da MB. Os artigos aqui publicados não refletem a posição ou a doutrina da Marinha e são da responsabilidade dos seus autores. Revista Pesquisa Naval / Serviço de Documentação da Marinha v. 1, n. 1, 1988 – Rio de Janeiro – RJ – Brasil – Marinha do Brasil Anual Título Abreviado: Pesq. Nav. ISSN 1414-8595 1. Marinha – Periódico – Pesquisa Científica. Serviço de Documentação da Marinha CDU 001.891.623/.9 CDD 623.807.2 Revista Pesquisa Naval SUMÁRIO Apresentação Vice-Almirante NEY ZANELLA DOS SANTOS Secretário de Ciência, Tecnologia e Inovação da Marinha .......................................................................................... 7 AMBIENTE OPERACIONAL Estudo das massas de água no Oceano Austral durante o verão de 2008 Carina Novak Laprea, Marcia Helena Moreira Valente, Nathália Oliveira de Castro ............................................. 9 Investigações geoacústicas do fundo marinho ao largo de Arraial do Cabo – RJ Capitão-de-Corveta (T) Isabel Cristina Vendrameto Peres Simões, Alberto Garcia de Figueiredo Jr................ 17 ENERGIA A vibração torcional como ferramenta de diagnóstico de defeitos na combustão dos cilindros de motores diesel geradores Capitão-de-Fragata (RM1) João do Espírito Santo Lima, Carlos Rodrigues Pereira Belchior ............................. 24 MATERIAIS ESPECIAIS Efeito do emprego de diferentes técnicas de dopagem na absorção de microondas de compósitos de PAni-DBSA com policloropreno Magali Silveira Pinho, Roberto da Costa Lima, Ana Paula Santiago De Falco, Bluma Guenther Soares, Regina Celia Reis Nunes ................................................................................................................................................. 32 PROCESSOS DECISÓRIOS O emprego da tabela de decisão Fuzzy na estruturação do conhecimento no processo de classificação de alvos Capitão-de-Fragata Cleber Almeida de Oliveira, Karl Heinz Kienitz, Mischel Carmen N. Belderrain.............. 38 SENSORES, GUERRA ELETRÔNICA E GUERRA ACÚSTICA Acompanhamento de alvos-radar utilizando filtragem de Kalman e vetor de estados com dimensão variável José Ricardo Potier de Oliveira ...................................................................................................................................... 49 Filtros optoeletrônicos de microondas não-recursivos para aplicações em radar e em guerra eletrônica Capitão-de-Corveta (EN) Carla de Sousa Martins, Capitão Olympio Lucchini Coutinho, William dos Santos Fegadolli, Prof. José Edimar Barbosa Oliveira ......................................................................... 56 CIBERNÉTICA (TECNOLOGIA DA INFORMAÇÃO) E COMUNICAÇÕES Sistemas de telecomunicações MC DS CDMA com estimação cega de canal baseada no método de subespaço e na técnica de potência Deolinda Fontes Cardoso, Fabian David Backx, Raimundo Sampaio Neto .......................................................... 66 CONTRIBUIÇÕES ESPECIAIS Criação e implantação do Núcleo de Inovação Tecnológica da Marinha (NIT-MB) Capitão-de-Mar-e-Guerra (RM1) João de Amorim Litaiff Júnior, Capitão-de-Fragata (RM1-T) Wismiley Oliveira Franco, Suboficial (RM1-MT) Paulo Roberto dos Santos Nascimento ................................................... 75 Apresentação Ao apresentar esta 22ª edição da Revista Pesquisa Naval (RPN), dirijo-me aos leitores para expressar minha satisfação em levar à comunidade científica mais uma coletânea de artigos, que confere ao periódico a importante função de disseminar o conhecimento científico multidisciplinar nas áreas de interesse da Marinha do Brasil. Alinhada ao novo Plano de Desenvolvimento Científico-Tecnológico e de Inovação da Marinha, a RPN, além de adotar uma nova dinâmica nos processos editoriais e de controle da qualidade dos artigos publicados, utiliza o Sistema Eletrônico de Editoração de Revistas (SEER) para elevar o nível de avaliação no Sistema QUALIS. Esta edição apresenta uma contribuição especial ao abordar a criação e a implantação do Núcleo de Inovação Tecnológica da Marinha (NIT-MB), responsável pela gestão da inovação na Marinha. A Secretaria de Ciência, Tecnologia e Inovação da Marinha agradece aos nossos colaboradores ad hoc pelo trabalho desenvolvido no processo de avaliação dos artigos submetidos a esta revista. Tais esforços contribuem para a melhoria da qualidade da produção científica. Boa leitura! REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 7 7 AMBIENTE OPERACIONAL Estudo das Massas de Água no Oceano Austral durante o Verão de 2008 Carina Novak Laprea, B.Sc. Centro de Hidrografia da Marinha E-mail: [email protected] Marcia Helena Moreira Valente, M.Sc. Centro de Hidrografia da Marinha E-mail: [email protected] Nathália Oliveira de Castro Universidade Estadual do Rio de Janeiro E-mail: [email protected] Resumo Este artigo apresenta os resultados obtidos de dados de CTD coletados durante a OPERANTAR XXVI, abrangendo a área localizada entre as latitudes de 42°S e 61°S, com o objetivo de acompanhar a trajetória das massas d’água que contribuem para a circulação das águas em terras brasileiras. Nas estações oceanográficas próximas à Passagem do Drake, nota-se a presença da Antarctic Surface Water (ASW), restrita aos primeiros 200m e o predomínio da Circumpolar Deep Water (CDW) em quase toda a coluna d’água. Na região da Bacia Argentina, observa-se a Subantartic Surface Water (SASW), com o núcleo de salinidade 34.1 localizado a 300m; a Antarctic Intermediate Water (AAIW), fluindo abaixo da SASW até a profundidade máxima de 1000m e a North Atlantic Deep Water (NADW) observada com um máximo de oxigênio abaixo de 2000m. Foi possível determinar a localização da PF, SACCF e SBACC na região de estudo. Palavras-chave CTD. Antártica. Frente Polar. Massas D’água. Study of water masses in the southern ocean during summer of 2008 Abstract This article presents results of CTD data collected during OPERANTAR XXVI, covering the area located between latitudes of 42°S and 61°S, in oreder to monitor the pass of water masses that contribute to the movement of water on Brazilian soil. In oceanographic stations near Drake Passage, the presence of Antartic Surface Water (ASW is noted, , restricted to the first 200m, and the predominance of Circumpolar Deep Water (CDW) in almost the entire water column. In the Argentine Basin region, the Subantartic Surface Water (SASW), with 34.1 salinity core located 300m; the Antartic Intermediate Water (AAIW), flowing down from the SASW until the maximum depth of 1000m; and the North Atlantic Deep Water (NADW), observed with maximum oxygen below 2000m. it was possible to determine the location of PF, SACCF and SBACC in the area of study. Keywords CTD. Antarctic. Polar Front. Water Masses. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 9-16 1 INTRODUÇÃO Devido à intensa e constante troca de propriedades físicas, químicas e biológicas entre as três maiores bacias oceânicas, o Oceano Austral tem papel crucial no sistema climático global. A repercussão dos fenômenos e dos processos meteo-oceanográficos que ocorrem no Oceano Austral, fazem dessa região objeto de grande interesse para a comunidade científica. À Marinha do Brasil, em especial, interessa a coleta de dados ambientais que permitam a melhoria do conhecimento das propriedades físico-químicas da água do mar e das previsões de parâmetros oceanográficos e meteorológicos no Atlântico Sul. O Oceano Austral é limitado ao sul pelo continente Antártico e ao norte pelo limite sul da Zona de Convergência Subtropical (ZCS) ou Frente Subtropical (STF – Subtropical Front), local de encontro da Corrente do Brasil e da Corrente das Malvinas, região essa responsável pela formação e dispersão de frentes atmosféricas e de correntes oceânicas que interferem no padrão de ventos e na circulação das regiões sul e sudeste brasileiras. A circulação regional do Oceano Austral é dominada por um fluxo oriental induzido topograficamente, denominado Corrente Circumpolar Antártica (ACC - Antartic Circumpolar Water) (Orsi et al., 1995). A ACC penetra no Oceano Atlântico por meio da Passagem do Drake e devido a fortes jatos de correntes que se encontram dentro da ACC, fazem com que ela se apresente em quatro frentes oceanográficas distintas que circundam o Oceano Austral. De norte a sul são elas: Frente Subantártica (SAF - Subantartic Front), Frente Polar (PF - Polar Front), Frente Sul da Corrente Circumpolar Antártica (SACCF - Southern Antartic Circumpolar Current Front) e Limite Sul da Corrente Circumpolar Antártica (SBACC - Southern Boundary Antartic Circumpolar Current) (Orsi et al., 1995). 9 CARINA NOVAK LAPREA / MARCIA HELENA MOREIRA VALENTE / NATHÁLIA OLIVEIRA DE CASTRO A interação das frentes da ACC com a batimetria de fundo e com o fluxo para norte das águas que saem do Mar de Weddell fazem com que a SAF e a PF atravessem o Platô das Falklands (Peterson & Withworth, 1989), atingindo a Bacia Argentina. Essa interação torna a região um local de forte mistura e intensa modificação de massas d’água (Heywood et al., 2002). FIGURA 1 Localização das estações oceanográficas realizadas durante as Operações Antárticas XXIV, XXV e XXVI. Os círculos sólidos (vermelho) representam as estações utilizadas para análise no presente trabalho. O presente estudo dá continuidade à pesquisa efetuada durante as OPERANTAR XXIV e XXV (Valente et al., 2006) na busca pela caracterização e pela localização das massas d’água que contribuem para a circulação das águas na porção oeste do Atlântico Sul e na identificação de fenômenos de interface como a Frente Polar e a Zona de Convergência Subtropical. 2 METODOLOGIA A presente comissão, realizada pelo Navio de Apoio Oceanográfico Ary Rongel, apresentou duas fases de trabalho distintas: a primeira realizada em dezembro de 2007 e a segunda em março de 2008. Durante a primeira fase foram realizadas sete estações oceanográficas em uma radial transversal, a Leste da Ilha Elefante, compreendida entre os paralelos de 56°S e 61°S. Na segunda fase, oito estações foram realizadas, compreendidas em duas radiais a Leste das Ilhas Falklands: uma longitudinal a Ilha, entre 050°W e 058°W e a outra transversal, entre 42°S e 47°S (Figura 1, a seguir). As coletas foram conduzidas pelo Centro de Hidrografia da Marinha (CHM) em cooperação com o Instituto Oceanográfico da Universidade de São Paulo (IOUSP) e a Universidade do Estado do Rio de Janeiro (UERJ). Para cada estação foi utilizado o equipamento CTD-O Seabird modelo 911 plus e acoplado a ele uma Rosette com 12 níveis de amostragem. Das amostras coletadas foram determinados os parâmetros salinidade (utilizando o salinômetro Guildline AUTOSAL) e oxigênio dissolvido (por meio do método de Winkler). Foram armazenadas amostras filtradas para análise de nutrientes dissol10 vidos (nitrito, nitrato, fosfato e silicato) e os filtros reservados para análise de clorofila-a. A interpretação dos dados adquiridos pelo CTD seguiu as etapas de processamento, filtragem e validação sugeridos pelo fabricante, descritos na Instrução Técnica L-18 (DHN, 1998). Os dados estão apresentados em perfis verticais de temperatura, salinidade e oxigênio e em diagramas T-S e S-O2, a fim de identificar as águas em duas porções: superfície e sub-superfície e região profunda bem como de evidenciar os limites de profundidades das massas d’água e os respectivos índices termohalinos. Os diagramas S-O2 deram REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 9-16 AMBIENTE OPERACIONAL uma boa ilustração das características das massas d’água visto que a salinidade varia muito pouco ao longo do diagrama T-S. Os resultados são apresentados em duas subseções deste trabalho:3.1.1 e 3.1.2, em virtude das variações de temperatura, salinidade e oxigênio caracterizarem duas regiões distintas: uma próximo a Passagem do Drake (radial 1) e outra no platô das Falklands - Bacia Argentina (radiais 2 e 3). As massas de água foram identificadas de acordo com as análises de Orsi et al. (1995) e comparadas com o diagrama T-S representado no WOCE Atlas, Volume 1 – Southest Ocean, editado pela Universidade do Texas (Orsi & Whitworth III, 2005). Posteriormente, é discutida na seção 3.2 a localização das frentes observadas no presente trabalho. 3 RESULTADOS E DISCUSSÃO 3.1. Massas de Água 3.1.1. Radial 1 (Passagem do Drake) As estações mais ao sul da presente comissão (estações 1 e 2) apresentaram similaridade àquelas localizadas na região da Passagem do Drake coletadas durante as comissões OPERANTAR XXIV e XXV (Valente et al., 2006). As temperaturas apresentaram-se inferiores a 0°C até aproximadamente 500m de profundidade, com o valor mínimo de -0.9°C à 150m. Diferentemente das comissões anteriores, esta água com temperatura negativa não aparece como uma língua contínua em torno de 150m, voltando a ser observada nos primeiros 130m das estações 5 e 6 (Figura 2A). Em relação à salinidade, assim como nas estações realizadas nas duas últimas comissões, os menores valores foram encontrados na superfície nas estações mais ao norte da primeira radial (33.85), com um aumento gradativo em direção ao sul (34.25). Em profundidade a salinidade aumenta gradativamente, com o valor de 34.65 estabilizado à aproximadamente 750m em todas as estações. O valor máximo de salinidade encontrado (34.7) é observado a partir da estação 3 em direção ao norte, entre 1000m e 2300m, aprofundando-se até 3000m nas estações 6 e 7 (Figura 2B). Na Figura 3, a seguir, verifica-se que os máximos de oxigênio estão em superfície e há um forte gradiente iniciando-se à profundidade de 150m, estendendo-se até os 850m, com um mínimo de oxigênio (3.64 mL/L) a 840m. A partir dessa profundidade os valores de oxigênio aumentam ligeiramente, não ultrapassando o volume de 4.8 mL/L à profundidade de cerca de 3000m FIGURA 2 Variação da temperatura potencial (A) e da salinidade (B) na radial 1 (seção 1-7). As linhas brancas tracejadas correspondem aos limites de 0ºC e salinidade 34.7. A REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 9-16 B 11 CARINA NOVAK LAPREA / MARCIA HELENA MOREIRA VALENTE / NATHÁLIA OLIVEIRA DE CASTRO (Figura 3), corroborando com a descrição de Valente et al. (2006) observada nas comissões anteriores. No diagrama T-S da radial 1 (Figura 4A), verifica-se que as temperaturas superficiais diminuem com o aumento da latitude, enquanto a salinidade varia entre 33.75 e 34.4. A água superficial, conhecida como ASW (Antartic Surface Water), apresentou temperaturas entre 3 e -0.9ºC e salinidade aproximada de 34.0. A água com o valor mínimo, localizada a aproximadamente 150m de profundidade, é conhecida como WW (Winter Water) e apresenta uma grande variação sazonal em suas características como resultado da convecção ocorrida durante o inverno, induzida pela formação do gelo marinho. Abaixo da WW é observada em todas as estações a CDW (Circumpolar Deep Water). Comumente dividida em UCDW (Upper Circumpolar Deep Water) e LCDW (Low Circumpolar Deep Water), sua fração menos densa, a UCDW é marcada por um mínimo local de oxigênio dissolvido visualizado no diagrama S-O2 (Figura 4B). A UCDW situa-se abaixo dos 150m, com um máximo de 2.5°C diminuindo até 1.5°C com o FIGURA 3 Variação do oxigênio dissolvido na radial 1 (seção 1-7). aumento da latitude. Apesar de sua profundidade variar, (Brandon et al., 2004), próximo a PF a UCDW é centrada em torno dos 800db. Com o aumento da profundidade nota-se um decréscimo da temperatura (1.6 a 1.2°C), ao mesmo tempo em que a salinidade apresenta uma estreita variação (34.71 a 34.73) até o núcleo da LCDW. Assim, para fins didáticos, o limite entre essas duas porções é demarcado através da isohalina de 34.7 (linha pontilhada nas seções verticais de salinidade). Abaixo da CDW nota-se a presença da WDW, considerada FIGURA 4 Diagrama T-S (A) e S-O2 (B) da radial 1 (estações 1 a 7). 12 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 9-16 AMBIENTE OPERACIONAL uma forma modificada da LCDW, decrescendo até alcançarem o limite de 0°C e 34.68. 3.1.2. Radiais 2 e 3 (Platô das Falklands) Nas radiais 2 e 3, devido a proximidade da STF, observa-se o aumento dos valores de temperatura em toda a coluna d’água (Tomczak & Godfrey, 2005). As águas superficiais se mantêm acima de 7ºC com a máxima temperatura encontrada na estação 15 (15.49°C), diminuindo em profundidade a um mínimo de 1.0°C, a 3000m de profundidade (Figura 5). Os perfis de salinidade são bastante semelhantes em distribuição de valores, com o mínimo na estação 11 (33.94), junto à superfície (Figura 6) e o máximo valor (34.79) encontrado na estação 15, próximo ao fundo. No diagrama T-S das radiais 2 e 3 (Figura 7A, a seguir), é possível identificar a SASW (Subantartic Surface Water), também chamada de Água das Malvinas (MW - Malvinas Water), restrita aos 200m de profundidade (Figura 6), com temperaturas entre 2.5 e 16ºC e salinidade de 34.1. Segundo (Pickard FIGURA 5 Variação da temperatura potencial na radial 2 (estações 11-8) (A) e na radial 3 (estações 12-15) (B). FIGURA 6 Variação da salinidade na radial 2 (estações 11-8) (A) e na radial 3 (estações 12-15) (B). As linhas brancas tracejadas correspondem aos limites de 0ºC e salinidade 34.7. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 9-16 13 CARINA NOVAK LAPREA / MARCIA HELENA MOREIRA VALENTE / NATHÁLIA OLIVEIRA DE CASTRO & Emery, 1982), a SASW é mais quente que a ASW, variando de 4º a 10°C, no inverno a até 14°C no verão. O retângulo limitado entre 33.6 e 34 de salinidade e temperaturas entre 4º e 16ºC são resultado da mistura entre a MW e a SW (Slope Water) (Gordon, 1981 apud Provost et al., 1990). A SW é uma estreita camada de salinidades inferiores a 34. A AAIW (Antartic Intermediate Water), formada próxima a PF afunda e flui para norte abaixo da SASW (Piola & Gordon, 1989 apud Provost et al., 1990). As características T-S da AAIW são próximas da SASW, apresentando temperaturas entre 2,5º a 5°C e salinidades de 34.1 a 34.3 (Provost et al., 1990). A separação entre a AAIW e a SASW pode ser vista no diagrama S-O2, com valores mais altos para a SASW (Figura 7B). A AAIW é identificada em todas as estações até a profundidade máxima de 1000m. Abaixo da AAIW são observadas novamente a UCDW e a LCDW. Esta última presente a partir da profundidade de 1500m, aprofundando-se para 2000m nas estações 8 e 9 (mais a leste) e na estação 12 (mais ao sul). A LCDW na região do Platô das Falklands é visualizada em menor porção na coluna d’água que na região da Passagem do Drake. A NADW (North Atlantic Deep Water), com valores de temperaturas entre 3º e 4°C e salinidades entre 34.6 e 35, fluindo entre 1000 e 4000m de profundidade na Zona Subantártica, é identificada principalmente pelo máximo de oxigênio no diagrama S-O2 (Figura 7B). A NADW se apresenta como um fluxo organizado fluindo para sul ao longo do contorno oeste do Oceano Atlântico até cerca de 42°S (Reid, 1989) e que, eventualmente, penetra na porção sudoeste da Bacia Argentina (Provost et al., 1990). O leve acréscimo na salinidade observada nas águas profundas no Platô das Falklands, em relação às observadas na Passagem do Drake, indica mistura entre a NADW e da CDW. 3.2. Frentes No presente trabalho, não foi observada a Frente Subtropical (STF), caracterizada como uma estreita faixa, onde as águas próximas à superfície mudam rapidamente de salinidade, 35.0 a 34.5 de norte a sul e a temperatura decresce rapidamente (Tomczak & Godfrey, 2005). De acordo com Pickard & Emery (1982), a partir da STF o Oceano Austral é comumente dividido em duas regiões distintas: Zona Subantártica, com águas superficiais variando entre 4°C a 10°C no inverno, até 14°C no verão e FIGURA 7 Diagrama T-S (A) e S-O2 (B) das radiais 2 e 3 (estações 8 a 15). 14 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 9-16 AMBIENTE OPERACIONAL a Zona Antártica, com temperaturas da superfície do mar variando entre -1,9 a 1°C no inverno e 4°C no verão. Assim, somente se pode inferir que as radiais 2 e 3 encontram-se na Zona Subantártica. As frentes que caracterizam a zonação da Corrente Circumpolar Antártica - ACC (SAF, PF, SACCF e SBACC) podem ser traçadas a partir do campo de temperatura potencial (Figura 2). A localização da SAF pode ser deduzida por um salto de 3º para 5ºC nas isotermas, na qual é máxima na frente da Corrente Circumpolar Antártica e pelo afundamento de um mínimo de salinidade associado à (AAIW) (Whitworth & Nowlin, 1987). Segundo Orsi et al. (1995), o núcleo da SAF está localizado na latitude onde a isoterma de 4ºC é encontrada a 400m de profundidade, o que não foi observado no presente trabalho. De acordo com o critério proposto por Deacon (1933) e posteriormente sistematizado por Orsi et al. (1995), a PF é localizada pelo limite máximo de alcance norte da ASW, caracterizada por temperaturas mínimas que se afundam até aproximadamente 200m de profundidade. No presente trabalho a PF está localizada entre as estações 5 e 6, a aproximadamente 56.90ºS. A posição da SACCF pode ser identificada na latitude onde a temperatura potencial excede 1.8ºC em direção norte, à profundidades inferiores a 500m (Orsi et al., 1995). Durante a presente comissão, a SACCF se fez presente próxima à estação 3, ao sul de 58.83ºS. Já a SBACC, onde a UCDW, com o aumento da latitude, atinge a camada de mistura e desaparece, é traçada no campo de temperatura por um decréscimo na temperatura potencial para valores abaixo de 0ºC e densidade potencial de 27.6 kg/m3, o que pode ser observado na aproximação da estação 1 (~60.96 ºS). REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 9-16 4 CONCLUSÕES As estações realizadas durante a Comissão OPERANTAR XXVI deram continuidade ao estudo das massas de água no Oceano Austral iniciada durante as Comissões OPERANTAR XXIV e OPERANTAR XXV (Valente et al, 2006). Além da identificação das principais porções de água, tornou-se possível determinar a localização da PF, SACCF e SBACC na região de estudo. As estações realizadas em latitudes menores e mais próximas à Zona de Convergência Subtropical, permitiram a observação de massas não reconhecidas anteriormente e que, igualmente, pertencem à complexa circulação austral e exercem grande influência no padrão de circulação oceânico-atmosférico brasileiro. As massas de água são: a SASW, introduzida pela Corrente das Malvinas, com o núcleo de salinidade 34.1 localizado a 300m na região da Bacia Argentina; a AAIW, formada próxima a PF, fluindo abaixo da SASW até a profundidade máxima de 1000m e a NADW, observada como um máximo de oxigênio abaixo de 2000m de profundidade. A limitação no espaçamento entre as estações oceanográficas realizadas e os limites das latitudes máximas e mínimas de coleta não permitiu observar o limite entre importantes feições como a SAF e a STF, bem como da Água Central do Atlântico (SACW - South Atlantic Central Water). A continuidade deste estudo de identificação de massas d’água no Oceano Austral pretende partir para a identificação das propriedades iniciais das massas, principalmente da AIAW e da SACW, que interferem na circulação oceânica, na distribuição de calor na interface oceano-atmosfera e na produtividade primária da porção sudoeste do Atlântico Sul. 15 CARINA NOVAK LAPREA / MARCIA HELENA MOREIRA VALENTE / NATHÁLIA OLIVEIRA DE CASTRO REFERÊNCIAS BRANDON, M. A.; NAGANOBU, M.; DEMER, D. A.;CHERNYSHKOV, P.; TRATHAN, P. N.;THORPE, S. E.; KAMEDA, T.; BEREZHINSKIY, O. A.; HAWKER, E. J.; GRANT, S.. Physical oceanography in the Scotia Sea during the CCAMLR 2000 Survey, Austral Summer 2000. Deep-Sea Research II, v. 51, p. 1301–1321, 2004. PICKARD, G. L.; EMERY, W. J.. Descriptive Physical Oceanography, 5 ed., Oxford: Pergamon Press, 1982. 320 p. PROVOST, C.; GANA, S.; GARÇON, V.; MAAMAATUAIAHUTAPU, K.; ENGLAND, M.. Hydrographic conditions in the Brazil-Malvinas Confluence during Austral Summer 1990. Journal of Geophysical Research, v. 100, C6, p. 10655–10678, 1990. DEACON, G. E. R. A general account of the hydrology of the South Atlantic Ocea. Discovery Reports, 7, p. 171–238, 1933. REID, J. L..On the Total Geostrophic Circulation of the South Atlantic Ocean: Flow Patterns, Tracers, and Transports. Prog. Oceanog., v.23, p- 149-244, 1989. DIRETORIA DE HIDROGRAFIA E NAVEGAÇÃO. Instruções Técnicas. Tomo II. Niterói: DHN, 1998. 362 p. TOMCZAK, M; GODFREY, J. S.. Regional Oceanography: An Introduction. Oxford: Pergamon Press, 2005. 422 p. HEYWOOD, K. J.; NAVEIRA GARABATO, A. C.;STEVENS, D. P.. High mixing rates in the abyssal Southern Ocean. Nature, n. 415, p. 1011–1014, 2002. VALENTE, M. H. M.; LAPREA, C. N.; CAVALCANTE, M. F.. Primeiros desenvolvimentos sobre a caracterização das massas d’água no oceano austral. Anais Hidrográficos. Tomo LXIII, p. 94-100, 2006. ORSI, A. H.; WHITWORTH III, T.; NOWLIN JR, W. D.. On the meridional extent and fronts of the Antarctic Circumpolar Current. Deep-Sea Research I, v. 42, p. 641–673, 1995. ORSI, A. H.; WHITWORTH III, T.. Southern Ocean. Hydrographic Atlas of the World Ocean Circulation Experiment (WOCE), Southampton, U.K., v. 1, 2004. 16 WHITWORTH III, T.; NOWLIN JR.; W. D.. Water masses and currents of the Southern Ocean at the Greenwich Meridian. Journal of Geophysical Research, v. 92, p. 6462–6476, 1987. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 9-16 AMBIENTE OPERACIONAL Investigações Geoacústicas do Fundo Marinho ao Largo de Arraial do Cabo – RJ Capitão-de-Corveta (T) Isabel Cristina Vendrameto Peres Simões Instituto de Estudos do Mar Alte. Paulo Moreira (IEAPM) - MB Rua Kioto 253 – Praia dos Anjos – Arraial do Cabo – RJ – CEP: 28930-000 E-mail: [email protected] Alberto Garcia de Figueiredo Jr. Departamento de Geologia - LAGEMAR - UFF Av. Litorânea, s/n – 4º andar – Niterói, RJ. E-mail: [email protected] Resumo Esta pesquisa, realizada ao largo da laguna de Araruama e Arraial do Cabo entre as profundidades de 45 e 100 metros, combina dados batimétricos, de tipo de fundo e de retroespalhamento (backscatter) para obter a morfologia do fundo marinho e o comportamento acústico do recobrimento sedimentar. Os dados de batimetria foram coletados por ecobatímetros, convencional e multifeixe, sendo que este gravou também os dados de retroespalhamento. As informações de tipo de fundo foram obtidas junto ao BNDO (Banco Nacional de Dados Oceanográficos – Centro de Hidrografia da Marinha). Os resultados permitiram detalhar a morfologia do fundo, identificar feições que foram relacionadas às estabilizações do nível do mar descritas na literatura e analisar o comportamento acústico dos tipos de sedimentos encontrados, a fim de contribuir para o entendimento da evolução sedimentar da região. Palavras-chave Batimetria. Geomorfologia Submarina. Geologia. Cabo Frio. Sea floor geoacustics investigations offshore Arraial do Cabo – RJ Abstract This study was carried out on the continental shelf offshore Araruama lagoon and Arraial do Cabo town, between 45 and 100 meters water depth. It combines bathymetric,type and backscatter data to obtain bottom morphology and bottom acoustic behavior of sediment covering. Bathymetric data were collected by conventional and multibeam echo sounders; backscatter strength data were collected by multibeam. Bottom sediment information was obtained at BNDO (Brazilian Data Bank for Oceanographic Information). The results allowed to detail the morphology of the fund identify features related to the stabilization of sea level described in literature, and analyse the acoustic behaviour of the types of sediments found to contribute to the understanding of the sedimentary evolution of the region. Keywords Bathymetry. Undersea Geomorphology. Geology. Cabo Frio. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 17-23 1. INTRODUÇÃO Para obter a modelagem acústica do fundo e do subfundo marinho é necessário conhecer as propriedades acústicas dos sedimentos e das rochas bem como a morfologia detalhada da área em estudo. A fim de atender a necessidade de identificar estas propriedades acústicas e em cumprimento ao Plano de Desenvolvimento Científico e Tecnológico da Marinha (PDCTM), o IEAPM desenvolveu uma pesquisa em parceria com o Laboratório de Geologia Marinha (LAGEMAR) da UFF, que tem como meta principal o estabelecimento da relação entre os parâmetros geoacústicos do fundo marinho e a propagação do som. A pesquisa foi dividida em quatro etapas, sendo que as duas primeiras, relativas à obtenção de informações geológicas/geomorfológicas (Artusi & Figueiredo Jr., 2003; Artusi, 2004; Artusi et al., 2005) e à caracterização das propriedades acústicas de sedimentos (Macedo et al., 2005; Macedo, 2006), já foram concluídas. A terceira etapa obteve a morfologia detalhada do fundo marinho de parte da área teste considerada pela pesquisa. A morfologia foi obtida por meio da integração das informações fornecidas pelos ecobatímetros mono e multifeixe com o tipo de sedimento de fundo (Simões et al., 2005; Simões & Figueiredo, 2005; Simões, 2006; Simões et al., 2006; Simões, 2007). A análise dos dados de retroespalhamento obtidos pelo ecobatímetro multifeixe e sua correlação com os tipos de sedimentos encontrados no fundo marinho são discutidas neste trabalho. A quarta etapa realizou um experimento acústico na área de interesse e seus resultados preliminares serão apresentados em um artigo específico. 1.1. Características da área estudada A terceira etapa da pesquisa foi concentrada na área situada na plataforma continental, ao largo da 17 ISABEL CRISTINA VENDRAMETO PERES SIMÕES, ALBERTO GARCIA DE FIGUEIREDO JR. laguna de Araruama e Arraial do Cabo - RJ entre as profundidades de 45 e 100 metros, como mostrado na Figura 1. Nessa região, o regime de ventos é predominantemente de NE, principalmente nas estações de primavera e de verão. As intensidades dos ventos juntamente com a morfologia submarina da região, favorecem a ocorrência do fenômeno da ressurgência. O relevo da plataforma continental é suave, sem formas de grande amplitude, sujeita às variações do nível do mar e a processos deposicionais e erosivos. Como a área continental costeira é bordejada por serras e por elevações associadas aos cordões arenosos, a carga sedimentar vinda do Maciço Costeiro é impedida de atingir a plataforma continental. A morfologia do fundo distingue dois domínios distintos entre as isobatimétricas de 30 e 100 m. No primeiro domínio, até cerca de 60 m de profundidade, as isóbatas são paralelas e a inclinação média é de 0,39º (1:145). No segundo domínio, entre 60 e 100 m de profundidade, à exceção da concavidade apresentada pelas isobatimétricas ao sul da ilha de Cabo Frio, o relevo é homogêneo e a inclinação diminui (0,15º / 1:370) (Artusi, 2004). O mapa de tipos de fundo elaborado com informações cadastradas no Banco Nacional de Dados Oceanográficos (BNDO) da Diretoria de Hidrografia e Navegação (DHN) (Artusi, 2004; Simões, 2007) mostra o predomínio dos sedimentos arenosos em quase toda a área da pesquisa. No trecho detalhado na terceira etapa, um grande corpo de areia lamosa ocupa as profundidades entre 80 e FIGURA 1 Localização da área estudada na terceira etapa da pesquisa com contorno batimétrico a cada 5 metros. 18 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 17-23 AMBIENTE OPERACIONAL 100m, estendendo-se um pouco além desta profundidade na direção leste. Corpos menos extensos deste mesmo tipo ocorrem ao sul e a leste da ilha de Cabo Frio. Entre 70 e 110 m de profundidade, ao sul da ilha de Cabo Frio, predominam lamas arenosas (Figura 2). 2. METODOLOGIA Após a aquisição e o processamento dos dados batimétricos obtidos com o multifeixe foi feita sua integração com os dados batimétricos convencionais arquivados no BNDO. Nesta integração foi FIGURA 2 Mapa de tipos de sedimentos do fundo na área da pesquisa. O quadro assinala a área estudada na terceira etapa. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 17-23 19 ISABEL CRISTINA VENDRAMETO PERES SIMÕES, ALBERTO GARCIA DE FIGUEIREDO JR. preciso considerar que o levantamento multifeixe fornece um volume de informações extremamente maior do que o obtido com o monofeixe, pois enquanto os pontos da sondagem convencional, na escala de 1:100.000, distam em média 600 m entre si, a distância lateral entre pontos de sondagem multifeixe é de cerca de 5 metros, na profundidade considerada neste estudo. O conjunto dos dados integrados gerou um mapa de contorno batimétrico e sua expressão tridimensional, o modelo digital do terreno (MDT) (Figura 3). O MDT mostra o comportamento da batimetria e, consequentemente, da morfologia submarina. O relevo observado é suave com paralelismo das isobatimétricas entre 40 e 110 m de profundidade em quase toda a área de estudo, apresentando uma inclinação ligeiramente maior na parte leste. A feição de maior destaque no MDT é a concavidade voltada para sul ao largo da ilha de Cabo Frio, onde a profundidade cai rapidamente até aproximadamente 80 metros (Figura 3 – quadro A). Sua borda leste corresponde ao limite entre dois tipos de sedimentos de fundo: areias e areias lamosas. Outras feições morfológicas, de dimensões menores, são notadas na área: ao norte da ilha de Cabo Frio há um leque de dejeção (Figura 3 – quadro B) composto por areias finas; a leste da ilha, uma canalização (Figura 3 – quadro C) cujo fundo é recoberto por areias e areias lamosas; na porção oeste da área destaca-se um alto-fundo alongado (Figura 3 – quadro D) no domínio das areias e, no limite sul, a partir de 100 m de profundidade, as isobatimétricas tornam-se sinuosas desenhando feições que se assemelham a bancos e cavas (Figura 3 – quadro E). Nessa área predominam FIGURA 3 Modelo digital do terreno baseado em informações batimétricas mono e multifeixe. Os quadros A a E assinalam a localização das feições encontradas. 20 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 17-23 AMBIENTE OPERACIONAL areias lamosas que passam a lamas arenosas na direção leste. Os dados de backscattering ou retroespalhamento (informação que corresponde ao valor médio de cada feixe) foram plotados e geraram o mapa da Figura 4. A intensidade do retroespalhamento é a medida da quantidade de reflexão do pulso acústico pelo fundo. O retroespalhamento, ou a intensidade do sinal de retorno, é gravado como som em decibéis (dB) e pode dar “pistas” sobre a natureza do fundo. De forma quase unânime, a literatura salienta a forte relação existente entre a intensidade do retroespalhamento e o tamanho do grão (Jackson et al., 1986; Hughes Clark et al., 1993 e 1997 e Knebel et al., 1999), de modo que essa pode ser entendida como uma medida da textura do sedimento superficial e da rugosidade do fundo. Apesar de necessitar ser validado pela amostragem sedimentar, o comportamento acústico de tipos sedimentares é razoavelmente uniforme. Em geral, as intensidades mais altas estão associadas com rochas ou com sedimentos grossos e as baixas intensidades caracterizam sedimentos mais finos. Sedimentos lamosos de bacias apresentam valores de retroespalhamento entre –30 e –40 dB; enquanto areias grossas e cascalhos localizadas em bancos variam de –15 a –25 dB (Hughes Clarke et al., 1997). Como o sistema visual humano tem uma percepção limitada dos tons de cinza, na Figura 4 foi aumentado o contraste expandindo o intervalo de intensidades de forma a ocupar todo o intervalo de 256 valores de cinza obtido numa imagem de 8 bits. Para realçar ainda mais o contraste, foi adotada uma escala colorida com seis subdivisões, onde as maiores intensidades estão associadas aos tons verdes e azuis e as menores aos brancos e rosados. FIGURA 4 Campos de intensidades de retroespalhamento. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 17-23 21 ISABEL CRISTINA VENDRAMETO PERES SIMÕES, ALBERTO GARCIA DE FIGUEIREDO JR. A análise visual do mapa distinguiu cinco campos distintos. Dentro dos limites de cada campo, a informação da amplitude do retroespalhamento, em dB, foi analisada quantitativamente obtendo-se a média aritmética. 3. DISCUSSÃO Os campos de intensidade do retroespalhamento foram analisados em ordem decrescente de intensidades: – o campo 1, de mais alta intensidade, está localizado nas bordas leste e sul da ilha de Cabo Frio. A média das amplitudes de -29 dB é compatível com as areias indicadas pelo mapa de tipo de fundo (Figura 2). A reflexão mais intensa também pode estar relacionada à inclinação do fundo, causada pela canalização (Figura 3 – quadro C), à sua rugosidade e/ou à ocorrência de sedimentos mais reflexivos sob a cobertura superficial; – o campo 2, ocorre a leste da ilha de Cabo Frio e na porção norte da área de estudo entre as profundidades de 40 e 60 m. A média das amplitudes encontrada (-34 dB) está na faixa indicada pela literatura para sedimentos lamosos. A Figura 2 indica que nesta cota batimétrica, o fundo é recoberto por sedimentos arenosos, provavelmente mais finos que os do campo 1, mas ainda bastante reflexivos. No lado leste da ilha de Cabo Frio, o recobrimento sedimentar é de areias e areias lamosas, mais compatíveis com a amplitude encontrada; – o campo 3, aparece no sul da área, a partir de 90 m de profundidade e ao longo da borda oeste da ilha de Cabo Frio. Na área abrangida por este campo, a média das amplitudes diminuiu para -38 dB, indicando a presença de sedimentos mais finos, o que é confirmado pela presença do corpo de areias lamosas no mapa de tipos de sedimentos (Figura 2). No entanto, na profundidade de 90 m, a literatura indica a presença de sedimentos carbonáticos eventualmente endurecidos (Dias et al., 1982; Artusi, 2004) que podem alterar o comportamento do sinal acústico; 22 – o campo 4 é o campo de maior abrangência na área de estudo. Na parte central (profundidades maiores que 60 m), a média das amplitudes é de -38 dB, enquanto na parte leste (profundidades menores que 60 m), a média é ligeiramente maior (-37 dB). No interior da enseada dos Anjos, a média aumenta para -35 dB, indicando um aumento do tamanho do grão. O mapa de tipos de sedimentos (Figura 2) mostra que, no centro e no leste da área, o fundo é de areias, areias lamosas e lamas arenosas. No interior da enseada dos Anjos, o aumento da amplitude corresponde a área recoberta pelo leque de espraiamento (Figura 3 – quadro B), onde os sedimentos são do tamanho areia e – o campo 5, que está localizado na parte sudeste da área em profundidades maiores que 60 m. A média das amplitudes é de -40 dB, compatível com sedimentos lamosos. Este campo está localizado na borda leste da feição côncava (parte do quadro A – Figura 3), onde o fundo de lamas arenosas confirma as baixas intensidades de reflexão associadas aos sedimentos finos. O valor de amplitude média e a observação do mosaico de intensidades sugerem que os limites do corpo de lama arenosa se estendam mais para norte ou que haja uma gradação para areia lamosa de forma que a área seja recoberta por sedimentos de granulometria fina. O comportamento menos intenso deste campo pode estar relacionado também à fluidez do material comprovada pela presença de camadas de lama fluida ao longo de testemunho coletado na área (Macedo, 2006). 4. CONCLUSÕES A terceira etapa desta pesquisa revelou feições morfológicas inéditas, bem como maiores detalhes de feições já citadas anteriormente na literatura (Costa et al., 1988; Muehe & Carvalho, 1993) devido ao detalhamento alcançado pelo levantamento batimétrico. Estas feições podem ser correlacionadas à dinâmica sedimentar e aos eventos eustáticos conhecidos de modo a contribuir para o entendimento da evolução sedimentar da região. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 17-23 AMBIENTE OPERACIONAL A análise quantitativa dos dados de retroespalhamento apresentada neste trabalho obteve resultados preliminares que concordam com dados relatados na literatura. A continuação do estudo pretende definir faixas de intensidade associadas aos tipos sedimentares a fim de estabelecer valores padrões para a área teste da pesquisa. Complementarmente, os dados de batimetria e retroespalhamento serão inseridos no MODPRES (Modelo de Previsão de Alcance Sonar) para cálculo do índice de reverberação do som em função da morfologia e do tipo da cobertura sedimentar do fundo. Em vista do refinamento alcançado no levantamento batimétrico é esperado um aumento da precisão do cálculo do alcance sonar. 5. AGRADECIMENTOS Os autores agradecem à tripulação do NHo Taurus, que realizou a coleta de dados batimétricos, e ao IEAPM e LAGEMAR-UFF pelo apoio. REFERÊNCIAS ARTUSI, L. & FIGUEIREDO Jr. (2003). Geomorfologia e sedimentação na plataforma continental ao largo da lagoa de Araruama, RJ. Uma reinterpretação. Anais do IX Congresso Brasileiro de Estudos do Quaternário, II Congresso do quaternário de países de Línguas Ibéricas e II Congresso sobre Planejamento e Gestão da Zona Costeira dos Países de Expressão Portuguesa. Recife – Pernambuco. ARTUSI, L. (2004). Geologia, geomorfologia e sismoestratigrafia rasa na plataforma continental ao largo da laguna de Araruama. LAGEMAR. Niterói, Universidade Federal Fluminense: Dissertação de Mestrado, 91 p. ARTUSI, L.; FIGUEIREDO JR, A. G.; MACEDO, H. C. & SIMÕES, I. C. V. P. (2005). Estudos geológicos para a obtenção de parâmetros geoacústicos de fundo e subfundo marinhos para aplicações navais. Revista Pesquisa Naval 18: 24-31. COSTA, M. P. A.; ALVES, E. C.; PACHECO, P. G. & MAIA, A. S. (1988). Prováveis estabilizações do nível do mar holocênico em trechos da plataforma continental entre o norte de São Paulo e o sul do Rio de Janeiro, constatadas através da morfologia de detalhe. XXV Congresso Brasileiro de Geologia, Belém, PA. DIAS, G.T.M.; PALMA, J.J.C. & PONZI, V.R.A. (1982). Matéria orgânica no Quaternário da margem continental entre Rio de Janeiro e Guarapari. Rio de Janeiro, UFRJ/PETROBRAS: 32 p. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 17-23 HUGHES CLARKE, J. E.; MAYER, L. A.; MITCHELL, N. C.; GODIN, A. & COSTELLO, G. (1993). Processing and interpretation of 95 kHz backscatter data from shallow-water multibeam sonars. OCEAN’S 93. HUGHES CLARKE, J. E.; DANFORTH, B. W. & VALENTINE, P. (1997). Areal seabed classification using backscatter angular response at 95 kHz. NATO SACLANT Undersea Research Centre Conference, Italy. JACKSON, D. R.; WINEBRENNER, D. P. & ISHIMARU, A. (1986). Application of the composite roughness model to high-frequency bottom backscattering. J. Acoust. Soc. America 79(5): 1410-1422. KNEBEL, H. J.; SIGNELL, R. P.; RENDIGS, R. R.; POPPE, L. J. & LIST, J. H. (1999). Seafloor environments in the Long Island Sound estuarine system. Marine Geology (155): 277-318. MACEDO, H. C.; SIMÕES, I. C. V. P.; FIGUEIREDO Jr, A. G. & ARTUSI, L. (2005). Análise de parâmetros geoacústicos do fundo e subfundo marinho e sua aplicação em operações navais. VI ETAS, CDROM, 2005. MACEDO, H. C. (2006). Análise da propagação de ondas compressionais (P) em sedimentos marinhos. LAGEMAR. Niterói, Universidade Federal Fluminense, Dissertação de Mestrado: 134 p. MUEHE, D. & CARVALHO, V. G. (1993). Geomorfologia, cobertura sedimentar e transporte de sedimentos na plataforma continental interna entre a Ponta de Saquarema e o Cabo Frio – RJ. Boletim do Instituto Oceanográfico 41(1/2): 1-12, 1993. SIMÕES, I. C. V. P.; FIGUEIREDO Jr, A. G.; ARTUSI, L. & MACEDO, H. C. (2005). Aplicação da batimetria multifeixe para a definição da morfologia detalhada ao largo da laguna de Araruama e Arraial do Cabo. X Congresso da ABEQUA, Guarapari / ES. CD-ROM SIMÕES, I. C. V. P. & FIGUEIREDO Jr, A. G. (2005). Levantamento geomorfológico com ecobatímetro multifeixe ao largo da laguna de Araruama e Arraial do Cabo. 9º Simpósio de Geologia do Sudeste, Niterói / RJ. Boletim de Resumos: p.188. SIMÕES, I. C. V. P.; FIGUEIREDO Jr, A. G. & ARTUSI, L. (2006). Feições morfológicas encontradas no fundo marinho ao largo da laguna de Araruama e Arraial do Cabo. XLIII Congresso Brasileiro de Geologia, Aracaju / SE. ______________________________________________ (2006). Relações entre a morfologia e a litologia de feições encontradas com ecobatímetro multifeixe no fundo marinho ao largo da laguna de Araruama e Arraial do Cabo. VI Simpósio de Nacional de Geomorfologia e Conferência Regional de Geomorfologia, Goiânia /GO. SIMÕES, I.C.V.P. (2007). Aplicação da batimetria multifeixe para definição da morfologia detalhada ao largo da laguna de Araruama e Arraial do Cabo LAGEMAR. Niterói, Universidade Federal Fluminense: Dissertação de Mestrado: 112 p. 23 ENERGIA A Vibração Torcional como Ferramenta de Diagnóstico de Defeitos na Combustão dos Cilindros de Motores Diesel Geradores Capitão-de-Fragata (RM1) João do Espírito Santo Lima, M.Sc. Centro de Instrução Almirante Wandenkolk, Instrutor E-mail: [email protected] Carlos Rodrigues Pereira Belchior, D.Sc. Universidade Federal do Rio de Janeiro, Professor E-mail: [email protected] Resumo O presente trabalho apresenta uma avaliação sobre a predição de vibrações torcionais no eixo de um motor Diesel-Gerador. Um Procedimento de Cálculo da vibração torcional é sistematizado no Programa Excel e utilizado para a análise operacional de um motor Diesel-Gerador de cinco cilindros em linha - 5T23HH, Burmeinster and Wain, 600 BHP, 720 RPM, quando este é submetido a dois tipos comuns de falhas simuladas na combustão dos cilindros: falha parcial e falha total na queima de somente um cilindro. Adicionalmente, é apresentada uma fórmula convencional empírica para o cálculo estimativo do amortecimento do motor e da resposta em tensão na ressonância. O Procedimento de Cálculo é empregado como ferramenta de diagnóstico das referidas falhas em cada cilindro, por meio da análise harmônica dos sinais de vibração torcional no eixo de manivelas do motor. Palavras-chave Vibração torcional. Diesel-Gerador. Procedimento de cálculo. Resposta em tensão e diagnóstico. Torsional vibration as a tool for fault diagnosis in combustion engine cylinders of Generating Sets Abstract This work presents an evaluation of the prediction of torsional vibration on the shaft of a Diesel Generator engine. A procedure of calculation of torsional vibration is programmed in Excel program and is used for operational analysis of a diesel-generator-five cylinder 5T23HH, “Burmeinster and Wain”, 600 BHP, 720 RPM, when it is subjected to two usual failure types simulated in the combustion of cylinders: partial and total failure in the burning of only one cylinder. Furthermore, an empirical conventional formula is presented to calculate the empirical estimation of the engine damping factor and the stress response in resonance. Calculation procedure is used as diagnosis tool for those failures in each engine cylinder, by means of harmonic analysis of torsional vibration signals in engine crankshaft. Keywords Torsional Vibration. Diesel Generator. Calculus Proceeding. Stress Response and Diagnosis. 24 1. INTRODUÇÃO O sistema dinâmico em funcionamento, composto por uma Instalação Diesel Geradora Elétrica, que possui como máquina acionadora principal o motor diesel, está exposto à vibração torcional induzida por um espectro complexo de forças de excitação, de diferentes amplitudes, frequências e ângulos de fase, que agem sobre o eixo de manivelas do motor. De acordo com [6], uma vez que os diferentes cilindros operem com consideráveis desvios das condições de projeto, em determinada velocidade, as vibrações torcionais no sistema podem ser fortemente influenciadas, de forma que o espectro de forças de excitação, induzido pelas forças de pressão do gás e pelas forças de aceleração das massas (êmbolos, conectora e eixo de manivelas do motor), seja diferente daquele correspondente ao padrão normal de operação. Em alguns casos, a operação não uniforme dos cilindros pode induzir tensões torcionais severas e ocasionar, até, a avaria do eixo do motor. Nesse sentido, há de se pensar em um método de cálculo da vibração torcional que permita monitorar, analisar e prognosticar este tipo de comportamento do sistema. Assim, este trabalho apresenta, inicialmente, uma análise da excitação no sistema e, posteriormente, utiliza um procedimento de cálculo para a análise e predição da vibração torcional no eixo de um motor diesel gerador de cinco cilindros - 5T23HH, “Burmeinster and Wain”, 600 BHP, 720 RPM, empregando fórmulas empíricas de amortecimento do motor [6,9]. Em seguida, o mesmo procedimento de cálculo é aplicado como ferramenta de análise e predição do espectro de tensões induzidas em REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 24-31 ENERGIA partes críticas do eixo do motor, quando este é submetido a condições simuladas de defeitos e falhas na combustão dos seus cilindros, como, por exemplo, uma perda total (falha total) ou uma perda parcial (falha parcial) na combustão de um determinado cilindro [6]. 2. METODOLOGIA 2.1. Análise da excitação do motor A resultante das forças tangenciais que agem sobre o eixo de manivelas do motor é devida às forças de pressão dos gases de combustão e às forças geradas pela aceleração das massas alternativas e rotativas do conjunto conectora-manivela do motor. A força tangencial gerada pela pressão dos gases, que interage sobre o pino do eixo de manivelas do motor, pode ser obtida pela pressão dos gases da combustão (p), que é estimada e expressa como uma pressão tangencial, normal ao tope do êmbolo do cilindro (pt) [9]. Assim, pode-se mostrar que o conjugado (Mt) sobre o eixo, gerado pela pressão dos gases, é [6, 9]: 01 Uma vez que ambas as funções, pressão ou conjugado, são periódicas, elas podem ser aproximadas por uma série de Fourier. Assim, a função pressão tangencial pode ser expressa por: 02 A força tangencial devida à aceleração das massas alternativas e rotativas do conjunto conectoramanivela do motor (FI) pode ser calculada em função da pressão tangencial correspondente (pI). A expressão para pI em função da posição da manivela φ é dada por 03 [9]: 03 Caso as componentes da pressão tangencial devido à aceleração das massas alternativas e rotativas sejam levadas em consideração, as componentes da pressão tangencial resultante podem ser obtidas como a seguir [5, 6, 7, 9]: 04 Na maioria das aplicações da expressão 04, somente os três primeiros componentes do conjugado de inércia são considerados e, para harmônicos de ordens superiores a 3, somente a resultante devido à pressão do gás é usada. 2.2. Efeito da pressão do gás e da aceleração das massas sobre o motor multicilindrico O conjugado que atua em cada cilindro ocasiona uma deflexão angular em todos os outros cilindros do motor. Assim, considere, por exemplo, a curva elástica do primeiro modo de vibração do sistema motor de n cilindros, representado na Figura 1. Para este modo de vibração, o conjugado em qualquer dos cilindros causa uma amplitude de deflexão em todas as massas do sistema que é proporcional às deflexões desta mesma curva elástica. Tem-se, então, conforme mostrado na FIGURA 1 Curva elástica do 1° modo de vibração torcional do sistema de n cilindros. Fonte: Lima (2003). REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 24-31 25 JOÃO DO ESPÍRITO SANTO LIMA, CARLOS RODRIGUES PEREIRA BELCHIOR Figura 2, para a condição de ressonância, as amplitudes θ1/1, θ2/1, . . ., θn/1, que ocorrem nas massas 1, 2, . . ., n devido ao conjugado do cilindro 1. Desenvolvendo-se uma análise semelhante para os conjugados que atuam nos outros cilindros do motor, conclui-se que em cada cilindro atuará uma série de harmônicos superpostos e variáveis. Desta forma, resulta que a energia introduzida pelo harmônico de ordem m nos n cilindros é dada pela expressão 05 [1, 5, 6, 9]: 05 Para fins de computação, ao invés da construção do diagrama de vetores, recorre-se a um método tabular para cálculo do somatório dos vetores de fase do motor, por meio da expressão 06 [1, 6]: 06 alternativos, consiste em substituir o sistema original por outro simplificado e composto de massas concentradas em determinados pontos, ligadas por seções de eixos sem massa e com apropriada rigidez torcional. A modelagem deve ser feita de modo que no sistema equivalente as massas se situem o mais próximo possível das regiões onde isto ocorre no sistema real, como por exemplo, os êmbolos e volante do motor são representados por massas situadas em seus respectivos centros de massa. Com este procedimento o sistema equivalente poderá apresentar características as mais próximas possíveis do original [1, 6]. A modelagem da Figura 4 considera que as inércias I1, I2,... Is, das massas discretizadas, estejam conectadas às seções de eixo adjacentes, de massas desprezíveis e valores de rigidez torcional K1, K2,... Ks. O amortecimento viscoso do sistema é definido pelos correspondentes torques de amortecimento viscoso externo C1, C2,... Cs por unidade de velocidade. Um amortecimento interno D1, D2,... Ds está presente caso algum elemento de acoplamento de borracha exista no sistema. As forças de excitação Φ1, Φ2,... Φs estão agindo sobre as massas discretas, sendo indicadas por seus respectivos ângulos de fase apropriados. A equação diferencial de movimento do sistema torcional da Figura 3, é dada pela expressão 07. FIGURA 2 Deflexões angulares no sistema de n cilindros devido ao conjugado do cilindro 1. Fonte: Belchior (1982); Lima (2003). 2.3. A modelagem da vibração torcional A tática normalmente utilizada, que permita calcular as características dinâmicas da vibração torcional em eixos de sistemas acionados por motores 26 3. RESULTADOS E DISCUSSÃO 3.1. O motor Diesel Gerador O Sistema equivalente e os dados de entrada do fabricante referentes ao motor diesel gerador de cinco cilindros em estudo são os apresentados na Figura 4 e na Tabela 1, a seguir [6]. 3.2. Cálculo das frequências naturais e modos de vibração A partir dos valores das constantes de rigidez torcional (k), para cada trecho do eixo e dos valores das inércias (I), de cada massa do sistema, fornecidos como dados de entrada na planilha Excel, foram calculados as frequências naturais e REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 24-31 ENERGIA 07 FIGURA 3 Vibrações torcionais forçadas e amortecidas. Sistema modelado de massas concentradas para um motor de s cilindros. Fonte: Margaronis (1992); Lima (2003). FIGURA 4 Sistema equivalente do diesel gerador de cinco cilindros. Fonte: Lima (2003). TABELA 1 Dados de entrada fornecidos pelo fabricante para o cálculo da vibração torcional no eixo do diesel gerador de cinco cilindros. os modos de vibração [6]. O método tabular de Holzer é utilizado como ferramenta para o cálculo das frequências naturais e respectivos modos de vibrar [1, 3, 5, 6, 9]. Na Tabela 2 são mostrados os resultados obtidos pelo método de Holzer e pelo fabricante no cálculo da frequência natural. TABELA 2 Comparação entre resultados – Frequências naturais do sistema diesel gerador de cinco cilindros. Fonte: Lima (2003). 3.3. Cálculo das respostas em tensão na condição de ressonância Fonte: Lima (2003). REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 24-31 Para o cálculo das respostas do sistema, sob a ação do conjugado de excitação, foram consideradas, inicialmente, para cada modo de vibrar, as diversas velocidades críticas. Admitindo-se, em cada uma destas velocidades, a ressonância entre os harmônicos de ordem m e o modo de vibração i, os seguintes passos de cálculo foram efetuados para obter a resposta em tensão na ressonância [6]: 27 JOÃO DO ESPÍRITO SANTO LIMA, CARLOS RODRIGUES PEREIRA BELCHIOR 1° Passo - Para cada seção do eixo do sistema equivalente, esquematizado na tabela de Holzer, calcula-se o valor da tensão de referência q*, por grau da amplitude do cilindro 1. O valor da tensão de referência é calculado pela expressão [1, 5, 6, 9]: 08 5° Passo: Calcula-se a tensão na ressonância qres, para o harmônico de ordem m e modo de vibrar i [6, 9]. Esta tensão será obtida pela expressão: 12 6° Passo: Calculam-se as tensões de flanco para as diversas velocidades do motor, fora da condição de ressonância q(N), com base nas expressões 13 e 14 [6, 9]: 2° Passo - Determina-se a seção em que q* apresente valor máximo q*N (tensão no nó por grau de amplitude do cilindro 1), retirado da tabela de Holzer. 3° Passo - Calcula-se, na seção onde ocorre q*N, a amplitude estática equivalente θs (resposta estática), dada pela expressão 09 [5, 6, 9]. Nesta expressão, a amplitude do componente da pressão tangencial |Tm| é obtida em função da pressão média indicada Pmi, correspondente a uma determinada velocidade crítica. Os valores dos componentes da pressão tangencial |Tm| são retirados das Curvas de Esforços Tangenciais [7]. 09 13 14 3.4. Cálculo da resposta total em tensão Na Figura 5, a seguir, para cada velocidade de operação do motor, a resposta total foi calculada pela soma aritmética dos três maiores valores de respostas devidas aos harmônicos dos conjugados de excitação em cada modo significativo de vibração [1, 5, 6, 9]. A resposta total também foi calculada pela raiz quadrada da soma dos quadrados das respostas (RMS – Root Mean Square) devidas a todos os harmônicos do modo significativo de vibração [1, 6]. 3.5. Análise da condição de falha total na combustão do cilindro 1 do motor 4° Passo: Calcula-se o amplificador dinâmico M e a resposta dinâmica θ1res, na condição de ressonância, pelas expressões 10 e 11, respectivamente [5, 6, 9]. Nestas expressões, é considerado que o amortecimento do sistema seja gerado principalmente pelo motor. 10 11 28 Ao simular que 0% do valor da Pmi, no cilindro 1, corresponda a um vetor de fase cujo módulo seja nulo (∆1 = 0), o espectro de vibração torcional no eixo do motor, em operação normal, sofre alterações significativas, as quais podem oferecer indicações importantes sobre a causa da referida falha. Nesta linha de raciocínio, ao analisar a Figura 6, a seguir, a condição de falha do cilindro 1 pode ser diagnosticada pela variação dos componentes de ordens 7 ½, 8 ½ e 9, por registrarem desvios significativos em relação à operação normal do motor. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 24-31 ENERGIA FIGURA 5 Resposta Total em Tensão - Valores Medidos e Calculados – Diesel Gerador de cinco cilindros (1 e 2 Modos). Velocidade de serviço: 720 RPM. Fonte: Lima (2003). 3.6. Análise da condição de falha parcial na combustão do cilindro 1 do motor A redução da Pmi pode estar relacionada a determinados defeitos e modificações de parâmetros inerentes à combustão do motor, tais como: I) início da injeção com regulagem atrasada; II) pressão máxima de combustão reduzida; III) anéis de segmento do êmbolo desgastados; IV) bicos injetores entupidos ou desgastados; V) alteração das propriedades de ignição do combustível; VI) válvula de injeção defeituosa; VII) defeito no duto de passagem da água de resfriamento do ar de admissão; VIII) temperatura de pré-aquecimento do combustível elevada; IX) desgaste nas paredes dos cilindros; X) desgaste das válvulas de admisREVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 24-31 são e descarga e XI) filtro de ar sujo [2, 4, 6, 9]. Assim, torna-se importante detectar, previamente, o cilindro onde ocorre a falha na combustão para que o operador tenha uma idéia clara do ponto onde se deve iniciar a investigação e diagnóstico do defeito. A análise da condição de falha parcial na combustão de um cilindro do motor foi motivada por esta necessidade. A fonte principal da vibração torcional nos eixos do motor é originada pelo conjugado devido à pressão do gás da combustão nos cilindros. Esse conjugado produz uma deflexão angular, ∆n, em relação ao cilindro 1, sobre cada cilindro do motor (Figura 3). Dentro dessa linha de raciocínio, na simulação da falha parcial, foi ajustado o 29 JOÃO DO ESPÍRITO SANTO LIMA, CARLOS RODRIGUES PEREIRA BELCHIOR FIGURA 6 Condição de falha total na combustão do cilindro 1 , na velocidade de serviço: 720 r.p.m. – Resposta total em tensão. Fonte: Lima (2003). módulo (valor) do vetor de fase (∆n), de acordo com o percentual da Pmi exigido pela condição de falha simulada. É perfeitamente aceitável pelas Sociedades Classificadoras e/ou fabricantes um desvio operacional de -10% da Pmi para o modelo de motor em análise [10, 11]. Assim, será analisado, a seguir, o efeito que uma falha parcial de -20% da Pmi (∆n= 0,8), na combustão de um cilindro, proporcionará na vibração do eixo do motor. Nesse tipo de falha, para apuração adequada do diagnóstico, é recomendável efetuar uma análise harmônica da resposta total na velocidade de serviço (720 r.p.m.), a fim de identificar uma variação mais significativa do sinal em relação à operação normal do motor. Nota-se, então, na Figura 7, que o diagnóstico da falha parcial da combustão do cilindro 1 do motor é melhor evidenciado pela variação da resposta em tensão dos harmônicos de ordens 6 ½ e 9 em relação à operação normal do motor. 30 As condições de falha total e parcial na combustão dos cilindros 2, 3, 4 e 5 do motor de cinco cilindros seguem uma linha de análise similar às comentadas para o cilindro 1 [6]. 4. CONCLUSÕES O procedimento de cálculo apresentado pode estabelecer diferenças importantes entre cada tipo de falha gerada na combustão dos cilindros, por meio da análise das características específicas do sinal de vibração, indicadas pelas intensidades dos componentes harmônicos em tensão. O percentual de variação da intensidade de cada harmônico em relação à operação normal do motor é essencial para identificar o diagnóstico da falha gerada e torna-se também uma ferramenta importante para analisar a necessidade de adotar medidas de contenção de avarias no eixo motor. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 24-31 ENERGIA FIGURA 7 Componentes harmônicas – condição de falha parcial e funcionamento normal do cilindro 1. Fonte: Lima (2003). Pelo estudo efetuado verifica-se que a condição de falha total na combustão de alguns cilindros pode causar amplitudes de vibração elevadas no eixo e consequentemente valores de tensão acima do limite recomendável de operação do motor. 5. KER WILSON, W., Practical Solution of Torsional Vibration Problems. John Wiley & Sons Inc., New York, v. 2, 1963. 6. LIMA, João do E. Santo, Um Estudo sobre Método de Cálculo de Vibração Torcional em Geradores Diesel e sua Aplicação como Ferramenta de Diagnóstico de Defeitos na Combustão dos Cilindros do Motor. Dissertação (Mestrado em Engenharia Oceânica) – Universidade Federal do Rio de Janeiro, Rio de Janeiro, 2003. REFERÊNCIAS 7. LLOYD’S REGISTER OF SHIPPING, Guidance notes on Torsional Vibration characteristics of main and auxiliary oil engines. 32 p., 1987. 1. BELCHIOR, C. R. P., Um Estudo sobre Vibrações Torcionais em Instalações Propulsoras e Auxiliares Marítimas. Tese (Doutorado em Engenharia Naval) – Escola Politécnica da Universidade de São Paulo, São Paulo, 1982. 8. MARGARONIS, Ioannis E., The Torsional Vibrations of Marine Diesel Engines under fault operation of its cylinders. Engineering Research Bd. 58, paper, n. 1 e 2, 1992. 2. CHANDROTH, G., Diagnostic Classifier Ensembles: Enforcing Diversity for reliability in the Combination. Tese (Doutorado em Engenharia Mecânica) – University of Sheffield, 1999. 3. DEN HARTOG, J. P., Vibração nos Sistemas Mecânicos. Edgard Blucher, Ed. U.S.P., 1972. 4. GRIMMELIUS, Hugo T.; MEILER Peter P.; MAAS Hans L.M.M. et al., Three State-of-the-art Methods for Condition Monitoring. I.E.E. Transaction on Industrial Electronics, paper, v. 46, n. 2, Apr. 1999. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 24-31 9. NESTORIDES, E. J., A Handbook on Torsional Vibration. British Internal Combustion Engine Research Laboratory, 1958. 10. VINCENT, M. R.; TURNBULL, A.T., Onboard Combustion Monitoring. Trans. I Mar. E, paper 7, v. 98, 1986. 11. WARKMAN, D. C., BP’s Performance-Monitoring System for Marine Diesel Engines. Trans. I Mar. E. (TM), paper 40, v. 95, 1983. 31 MATERIAIS ESPECIAIS Efeito do emprego de diferentes técnicas de dopagem na absorção de microondas de compósitos de PAni-DBSA com policloropreno Magali Silveira Pinho, D.Sc. Instituto de Pesquisas da Marinha (IPqM). E-mail: [email protected] Roberto da Costa Lima, D.Sc. Instituto de Pesquisas da Marinha (IPqM). E-mail: [email protected] Ana Paula Santiago De Falco, M.Sc. Instituto de Pesquisas da Marinha (IPqM). Instituto de Macromoléculas (IMA) da Universidade Federal do Rio de Janeiro (UFRJ), RJ, Brasil. E-mail: [email protected] Bluma Guenther Soares, D.Sc. Instituto de Macromoléculas (IMA) da Universidade Federal do Rio de Janeiro (UFRJ), RJ, Brasil. E-mail: [email protected] Regina Celia Reis Nunes, D.Sc. Instituto de Macromoléculas (IMA) da Universidade Federal do Rio de Janeiro (UFRJ), RJ, Brasil E-mail: [email protected] Resumo Este trabalho teve por objetivo avaliar o efeito decorrente da utilização de diferentes processos de obtenção de polianilina dopada com o ácido dodecilbenzeno sulfônico (PAni-DBSA) sobre as propriedades absorvedoras de microondas de compósitos de PAni-DBSA com o policloropreno (CR). O desempenho destes compósitos como materiais absorvedores de ondas eletromagnéticas (RAM) foi avaliado pelo emprego de um guia de ondas retangular, para a faixa de frequência 8,0-16,0 GHz. O método utilizado nas medidas de refletividade (dB), baseou-se na determinação dos valores, relativos ao vácuo, de permeabilidade complexa (µr*) e de permissividade complexa (εr*), a partir de dados de espalhamento, sendo conhecido como método de Transmissão/Reflexão (T/R).O emprego da técnica de maceração propiciou uma redução do limiar de percolação, onde o compósito 50:50 com 1,0 mm de espessura apresentou uma absorção de microondas de aproximadamente 99,90 % (refletividade ≅ -30 dB). Palavras-chave Polianilina. Ácido Dodecilbenzeno Sulfônico. Compósitos com Policloropreno. Guia de Ondas. RAM. Effect of different doping techniques on the microwave absorption of PAni-DBSA composites with polychloroprene Abstract This study aimed to evaluate the effect of the use of different procedures for obtaining polyaniline doped with dodecylbenzenesulfonic acid (PAni-DBSA) to be used as radar absorbing materials (RAM) with polychloroprene (CR). The performance of these composites as RAM was assessed by the use of a waveguide medium for the frequency range 8.0-16.0 GHz. The method adopted to measure the complex permeability (µr*) and complex permittivity (εr*) related to free-space from scattering parameters, was the transmission line technique known as the Transmission/Reflection method (T/R). The maceration technique allowed the percolation threshold reduction, where the 50:50 composite 1.0 mm thick had a microwave absorption of about 99.90 % (reflectivity ≅ - 30 dB). Keywords Polyaniline. Dodecylbenzenesulfonic Acid. Polychloroprene Composites. Waveguide. RAM. 32 1. INTRODUÇÃO De modo a dificultar ou a minimizar a reflexão detectada pelo radar (eco), produzida pelas estruturas metálicas de plataformas militares, têm sido desenvolvidas tecnologias apropriadas para a redução da seção reta radar (RCS, radar cross section), onde RCS de uma plataforma pode ser definida, de forma simplificada, como uma medida da potência refletida em uma direção específica [1]. Com base em programas específicos, estas tecnologias envolvem a construção de embarcações com seção reta reduzida e/ou o emprego de material absorvedor de radiação eletromagnética na frequência de radar (RAM, radar absorbing material) [1]. O emprego de diferentes materiais destinados a absorver a radiação eletromagnética, na faixa de frequência de microondas (radar), tem recebido a atenção de centros de pesquisa envolvidos com esta área estratégica. Recentes desenvolvimentos em Química e em Ciência dos materiais têm propiciado o emprego de materiais que, efetivamente, reduzem a RCS ou atuam na blindagem contra a interferência eletromagnética (EMI, electromagnetic interference) [1, 2]. A utilização de materiais absorvedores de microndas (RAM) constitui uma das linhas de pesquisa mais fascinantes da Engenharia de materiais. Por meio do emprego de um RAM, ocorre a conversão da energia de microondas, gerada pelo radar, em calor. Desta forma, um RAM deve ser constituído por compostos, com elevada perda de energia, que absorvam a radiação incidente em frequências sintonizadas e dissipem a energia absorvida sob a forma de calor, inibindo a energia necessária para o sinal de eco de detecção por radar. Estes materiais podem ser constituídos REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 32-37 MATERIAIS ESPECIAIS por carbono, compostos ferrimagnéticos e ferromagnéticos e, mais recentemente, por polímeros condutores [3 - 6]. A vantagem na utilização de polímeros condutores, tais como as polianilinas, baseia-se na menor densidade desses materiais em comparação com os ferromagnéticos e ferrimagnéticos [7, 8]. As polianilinas não se encontram disponíveis no mercado nacional e apresentam alto valor agregado, pois podem ser utilizadas em inúmeras aplicações, tais como na área biomédica no desenvolvimento de músculos artificiais, na liberação controlada de drogas e como estímulo para a regeneração de nervos; em membranas trocadoras de prótons para células a combustível e como RAM; dentre outras aplicações [9 - 13]. A mudança nos valores de condutividade elétrica de polímeros isolantes decorrente da adição de polímeros condutores tem sido explicada pela teoria da percolação. Quando a concentração do polímero condutor é pequena, a condutividade é essencialmente a do meio dielétrico. Com o aumento da concentração um limite inferior é observado sendo conhecido como limiar de percolação. A região caracterizada por um aumento acentuado nos valores de condutividade é conhecida como faixa de percolação [5]. O policloropreno (CR) é um elastômero que, por apresentar elevada resis-tência à atmosfera marítima, torna-se adequado para inúmeras aplicações navais [1]. Para as medidas realizadas em guia de ondas, Nicolson e Ross desenvolveram um método para a determinação dos valores, relativos ao vácuo, de permeabilidade complexa (µr *) e de permissividade complexa (ε r *), a partir dos parâmetros de espalhamento (S11 e S21) [14]. O presente trabalho teve por objetivo estudar o efeito de diferentes processos de obtenção de polianilinas dopadas com o ácido dodecilbenzeno sulfônico (PAni-DBSA) na absorção de microondas. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 32-37 2. PROCEDIMENTO EXPERIMENTAL 2.1. Materiais Um dos métodos empregados, neste trabalho, consistiu na síntese de PAni, por via química, objetivando a obtenção de polímeros com boas propriedades elétricas e em maior quantidade, quando comparada à síntese eletroquímica, a qual apresenta como fator limitante a área do eletrodo empregado. Os polímeros sintetizados, sob a denominação de cloridrato de esmeraldina (PAni-HCl), foram resultantes do acoplamento oxidativo do tipo 1,4de moléculas monoméricas de anilina, iniciado pelo uso do forte agente de oxidação, perssulfato de amônio, em meio de ácido clorídrico (pH 0,0-1,0) [1, 15]. A razão molar anilina/oxidante correspondeu a 0,83. Esses materiais foram obtidos sob a forma de um pó com coloração verde esmeralda. A PAni-HCl obtida foi submetida ao processo de neutralização (NH4OH; 0,1 M), resultando na obtenção de PAni desdopada (EB) com posterior redopagem com solução 1,0 M do ácido dodecilbenzeno sulfônico por 24 h sob agitação magnética, dando origem à PAni- DBSA (1,0 M), após secagem a vácuo à temperatura ambiente até peso constante. O outro método de obtenção de PAni-DBSA (1:3) ocorreu pela mistura mecânica em almofariz (técnica de maceração), utilizando a razão ponderal 1:3 de EB:DBSA. Nesse caso, foi obtido um material pastoso, de coloração azul escura brilhosa, que após dopagem térmica, por meio de aquecimento em estufa a 100 °C, por 1 hora, resultou na formação de um complexo muito viscoso, opaco, de cor verde escuro, que foi seco a vácuo à temperatura ambiente até a obtenção de peso constante [16 - 21]. Foi utilizado um excesso do dopante DBSA, para evitar a presença de EB. Todos os reagentes foram grau PA e utilizados como recebidos, com exceção da anilina que foi bidestilada a vácuo. 33 MAGALI S. PINHO, ROBERTO DA C. LIMA, ANA PAULA S. DE FALCO, BLUMA G. SOARES, REGINA CELIA R. NUNES 2.2. Obtenção dos Compósitos com o Policloropreno As amostras de polianilinas foram misturadas, em adição aos agentes de vulcanização, com o CR resultando nas composições percentuais em massa 50:50 e 60:40 de PAni-DBSA:CR (% em massa) [1]. As misturas físicas (blendas) foram realizadas em um misturador de cilindros Berstoff à temperatura ambiente e com velocidades de 22 e 25 rpm (anterior e posterior), de acordo com os procedimentos clássicos empregados pela indústria de borracha. As blendas foram moldadas por compressão a 150 °C e 6,7 MPa. Os corpos de prova foram obtidos em triplicata sob a forma de tapetes vulcanizados, com dimensões de 4,0 x 4,0 cm e espessuras de 0,10 e 0,15 cm [1]. Foram obtidas três amostras para cada compósito. 2.3. Técnicas de Caracterização 2.3.1. Medidas de Condutividade Para avaliação das propriedades elétricas foram realizadas medidas de condutividade superficial pelo método padrão de 4 pontas, utilizando-se o eletrômetro Keithley 617 com fonte de corrente Keithley 224 [1]. Essas medidas foram feitas em triplicata. 2.3.2. Microscopia Eletrônica de Varredura (SEM) A observação micromorfológica das amostras de PAni-DBSA, sob a forma de pós, obtidas pelas diferentes técnicas de dopagem foi realizada pelo emprego de um microscópio eletrônico de varredura Leica Mod S440, utilizando o detector de elétrons secundários. que determina as perdas de inserção e retorno em magnitude e fase de amostras submetidas a teste (SUT, Sample Under Test), por meio da comparação entre o sinal transmitido pela SUT e o refletido na sua entrada [14, 16]. Estas medidas foram feitas em triplicata. 3. RESULTADOS E DISCUSSÃO De forma diferente da obtenção de PAni-DBSA por meio do emprego de solução de DBSA 1,0 M, a utilização da técnica de maceração resultou na formação do complexo condutor de PAni-DBSA indicada pela visível alteração da consistência pastosa para uma forma mais sólida. Este método de dopagem térmica propiciou uma maior penetração dos grupos alquídicos de cadeia longa no esqueleto polimérico, sem a utilização de solventes. O efeito do emprego das diferentes técnicas de obtenção de PAni-DBSA sobre os valores de condutividade superficial para os compósitos com o CR é ilustrado na Figura 1. Observam-se, na Figura 1, as respectivas faixas de percolação para os compósitos, ilustradas pelo aumento acentuado nos valores de condutividade superfi cial. Para a amostra de PAni-DBSA(1:3) este aumento de 5 ordens de grandeza (10-10 para 10-5 S/cm) ocorreu para uma menor concentração (50 % em massa), em relação à técnica em solução. FIGURA 1 Avaliação do emprego das técnicas de dopagem por maceração (1:3) e solução (1,0 M) sobre os valores de condutividade superficial dos compósitos. 2.3.3. Método de Transmissão/Reflexão (T/R) A permeabilidade e permissividade complexas (µr* e εr*, respectivamente) foram determinadas a partir de dados de espalhamento, por intermédio do analisador vetorial de redes HP 8510, equipamento 34 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 32-37 MATERIAIS ESPECIAIS O emprego da técnica de maceração foi, deste modo, responsável pela redução da concentração de percolação. Tal comportamento pode ser atribuído à melhor dispersão de PAni-DBSA (1:3) na matriz de CR em relação à PAni-DBSA (1,0 M), devido ao excesso de DBSA empregado, que atua como plastificante [1, 17]. Além disso, o excesso de DBSA pode estar promovendo uma possível dopagem adicional durante o processo de mistura (dopagem mecânica). FIGURA 2 Imagens de SEM para as amostras de PAni-DBSA sob a forma de pós. A Figura 2 ilustra as imagens obtidas por SEM para as amostras dos pós de PAni-DBSA obtidas (a) pelo emprego de solução 1,0 M de DBSA e (b) pela técnica de maceração. Pelas imagens de SEM, na Figura 2, pode ser observado que a técnica de maceração utilizando a razão ponderal 1:3 de EB:DBSA propiciou a obtenção de grãos poliméricos bem maiores para o complexo condutor de PAni-DBSA. Tal comportamento pode ser atribuído à dopagem térmica empregada pela técnica de maceração, que propicia uma maior mobilidade de DBSA, facilitando sua penetração e resultando em um aumento de tamanho. A avaliação do desempenho dos compósitos de PAni-DBSA (1,0 M):CR como RAM é ilustrada pela Figura 3, para as composições percentuais em massa (a) 50:50 e (b) 60:40, com espessuras de 1,5 mm. FIGURA 3 Medidas de refletividade para os compósitos de PAniDBSA (1,0M):CR com composições percentuais em massa (a) 50:50 e (b) 60:40 e espessuras de 1,5 mm. Pelos resultados apresentados, o compósito 60:40 apresentou o melhor desempenho como RAM, com absorção de microondas superior a 99,00 % para a frequência de 12,0 GHz. Um outro parâmetro, além do dopante, responsável pela variação da absorção de microondas é a espessura. Deste modo, esta foi variada de forma que a absorção máxima de microondas permanecesse em 12,0 GHz, para viabilizar um estudo comparativo com os compósitos à base de PAni-DBSA(1,0M). A avaliação do desempenho dos compósitos de PAni-DBSA(1:3):CR como RAM é ilustrada pela REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 32-37 35 MAGALI S. PINHO, ROBERTO DA C. LIMA, ANA PAULA S. DE FALCO, BLUMA G. SOARES, REGINA CELIA R. NUNES Figura 4, para as composições percentuais em massa (a) 50:50 e (b) 60:40, com espessuras de 1,0 mm. O uso da técnica de maceração utilizando a razão ponderal 1:3 de EB:DBSA possibilitou a obtenção de um eficiente RAM, empregando-se uma menor composição percentual em massa em relação à técnica em solução (1,0 M). Tal comportamento pode ser atribuído à dopagem térmica empregada pela técnica de maceração, que aumenta a mobilidade de DBSA, facilitando sua participação no processo contínuo de transferência de carga do complexo de PAni-DBSA e resultando em um aumento acentuado dos valores de condutividade (Figura 1). Além disso, pode estar ocorrendo uma dopagem mecânica durante o processamento, pelo excesso de DBSA empregado, que, também, promove uma maior dispersão das partículas de PAni-DBSA (efeito plastificante). Como resultado, um bom desempenho como RAM com a absorção máxima de microondas em 12,0 GHz foi observado para o compósito 50:50 de PAni-DBSA(1:3):CR, com redução de 0,5 mm na espessura. FIGURA 4 Medidas de refletividade para os compósitos de PAniDBSA (1:3):CR com composições percentuais em massa (a) 50:50 e (b) 60:40 e espessuras de 1,0 mm. Os compósitos obtidos apresentam como vantagem a utilização de menores concentrações em relação aos materiais ferrimagnéticos (ferritas) e ferromagnéticos (ferrocarbonila) para os quais concentrações de 80% em massa são necessárias para a obtenção de um bom desempenho como RAM [1, 7, 8, 22]. 5. AGRADECIMENTOS 4. CONCLUSÃO Os autores agradecem ao Centro de Tecnologia Mineral (CETEM) pelas análises de SEM. A obtenção de PAni-DBSA pela técnica de maceração com razão ponderal 1:3, possibilitou o emprego de uma menor composição percentual em massa (50:50) como um eficiente RAM para a frequência de 12,0 GHz (absorção máxima de microondas de aproximadamente 99,90 % e refletividade ≅ −30 dB), utilizando-se uma menor espessura (1,0 mm). Este resultado pode ser atribuído ao aumento acentuado no valor de condutividade, ilustrado pela faixa de percolação. O emprego da técnica de maceração foi deste modo, responsável pela redução da concentração de percolação para 50 % em massa, decorrente da dopagem térmica e mecânica. 36 REFERÊNCIAS [1] PINHO, M. S. Materiais Absorvedores de Radiação Eletromagnética em Matrizes de Policloropreno. 1a ed., Brasília: Comissão de Relações Exteriores e de Defesa Nacionl da Câmara dos Deputados, 2006, pp. 467. [2] CASSIGNOL, C.; CAVARERO, M.; BOUDET, A.; RICARD, A.. Polymer, 40, 1139-1151 (1999). “Microstructure-conductivity relationship in conducting polypyrrole/epoxy composites”. [3] ZILBERMAN, M.; TITELMAN, G. I.; SIEGMANN, A.; HABA, Y.; NARKIS, M.; ALPERSTEIN, D. Journal of Applied Polymer Science., 66, 243-253 (1997). “Conductive blends of thermally dodecylbenzene sulfonic acid-doped polyaniline with thermoplastic polymers”. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 32-37 MATERIAIS ESPECIAIS [4] TITELMAN, G. I.; ZILBERMAN, M.; SIEGMANN, A.; HABA, Y.,; NARKIS, M.; ALPERSTEIN, D. Journal of Applied Polymer Science, 66, 2199-2208 (1997). “Thermal dynamic processing of polyaniline with dodecylbenzene sulfonic acid”. [5] BANERJEE, P.; MANDAL, B. M.. Macromolecules, 28, 3940-3943 (1995). “Conducting polyaniline nanoparticles blends with extremely low percolation thresholds”. [6] HEEGER, A. J. Synthetic Metals; 55-57, 3471-82 (1993). “Polyaniline with surfactant counterions: conducting polymer materials which are processible in the conducting form”. [7] CAFFARENA, V. R.; PINHO, M. S.; CAPITANEO, J. L.; OGASAWARA, T. Mater. Chem. Phys.;101(1), 81-6 (2007). “Magnetic properties of Z-type Ba3Co1.3Zn0.3Cu 0.4Fe24O41 nanoparticles”. [8] LIMA, R. C.; PINHO, M. S.; OGASAWARA, T. J. Therm. Anal. Calorim; 97, 131-136 (2009). “Thermal characterization of the intermediary products of the syntesis of Zn-substituted barium hexaferrite”. [9] NIKOLAIDIS, M. G.; SEJDIC, J. T. G.; BOWMAKER, A.; COONEY, R. P.; THOMPSON, C.; KILMARTIN, P. A. Current Applied Physics; 4, 347-51 (2004). [10] SANKIR, N. D.; MECHAM, J. B.; GOFF, R. M.; HARRISON, W. L.; CLAUS, R. O. Smart Materials and Structures, 15, 200-203 (2006). “Novel ductile polyaniline/sulfonated poly(arylene ether sulfone) composites”. [11] NAGARALE, R. K.; GOHIL, G. S.; SHAHI, V. K. Journal of Menbrane Science, 280, 389-396 (2006). “Sulfonated poly(ether ether ketone)/polyaniline composite proton-exchange membrane” . [12] CHEN, C. Y.; RODRIGUEZ, J. I. G.; DUKE, M. C.; COSTA, R. F. D.; DICKS, A. L.; COSTA, J. C. D. Journal of Powder Sources, 166, 324-330 (2006). “Nafion/polyaniline/silica composite membranes for direct methanol fuel cell application”. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 32-37 [13] DE FALCO, A. P. S.; PINHO, M. S.; MENDES, L. C. “Thermal Properties of Sulfonated PAni”. In: Proceedings of Polychar 17-World Forum on Advanced Materials, Rouen, France, 2009, 21. [14] NICOLSON, A. M.; ROSS, G. - IEEE Trans. Instrum. Meas.; IM-19, 377-382 (1970). [15] GAZOTTI, W. A.; DE PAOLI, M. - A. Synthetic Metals; 80, 263269 (1996). “High yield preparation of a soluble polyaniline derivative”. [16] CHAN, H. S. O.; NG, S. C.; HO, P. K. H. Macromolecules, 27, 21592164 (1994). “Polyanilines doped with phosphonic acids: their preparation and characterization”. [17] MANTOVANi, G. L.; MACDIARMID, A. G.; MATTOSO, L. H. C. Synthetic Metals, 84, 73-74 (1997). “Secondary doping in elastomeric polyaniline blends”. [18] LUX, F. Polymer, 35, 2915-2936 (1994). “Properties of electronically conductive polyaniline: a comparison between well-known literature data and some recent experimental findings”. [19] HUANG, W. S.; MACDIARMID, A. G. Polymer, 34, 1833-1845 (1993). “Optical properties of polyaniline”. [20] KURAMOTO, N.; TOMITA, A. Synthetic Metals, 88, 147-151 (1997). “Chemical oxidative polymerization of dodecylbenzenesulfonic acid aniline salt”. [21] YONG, C.; SMITH, P.; HEEGER, A. J. Synthetic Metals, 5557, 3514-3519 (1993). “Counter-ion induced processability of conducting polyaniline”. [22] PINHO, M. S.; GREGORI, M. L.; NUNES, R. C. R.; SOARES, B. G. European Polymer Journal, 38, 11, 2321-2327 (2002). “Performance of radar absorbing materials by waveguide measurements for X and Ku-band frequencies”. 37 PROCESSOS DECISÓRIOS O Emprego da Tabela de Decisão Fuzzy na Estruturação do Conhecimento no Processo de Classificação de Alvos Capitão-de-Fragata Cleber Almeida de Oliveira Centro de Análises de Sistemas Navais e Instituto Tecnológico de Aeronáutica – CASNAV / ITA, Praça Marechal Eduardo Gomes, 50 - Vila das Acácias - São José dos Campos - SP - Brasil E-mail: [email protected] Karl Heinz Kienitz, D.Sc. Instituto Tecnológico de Aeronáutica – ITA, Praça Marechal Eduardo Gomes, 50 - Vila das Acácias - São José dos Campos - SP - Brasil E-mail: [email protected] Mischel Carmen N. Belderrain, D.Sc. Instituto Tecnológico de Aeronáutica – ITA, Praça Marechal Eduardo Gomes, 50 - Vila das Acácias - São José dos Campos - SP - Brasil E-mail: [email protected] Resumo Este estudo propõe a utilização das tabelas de decisão fuzzy (TDF), como uma estrutura para a construção das regras de um sistema, a base de conhecimento, para apoiar a classificação e identificação de alvos de superfície durante o processo de fusão de dados. Esta abordagem visa a otimizar a compilação do quadro tático marítimo com a atribuição do grau de confiança na declaração de classificação e identificação do contato. Além disso, proporciona uma estrutura simples e adequada para modificação e validação da base de regras, de acordo com os objetivos políticos e militares da missão. Observou-se uma melhor interpretação das informações por meio da estrutura da TDF e a atribuição do grau de confiança na declaração de identidade do contato aprimorou a definição de prioridade para o envio de helicóptero para a identificação visual. Palavras-chave Fusão de Dados. Tabela de Decisão Fuzzy. Quadro Tático. Using Fuzzy Decision Table to Structure Knowledge in Target Classification Process Abstract This study proposes the use o fuzzy decision tables (FDT), as a structure to construct knowledge based system rules, to support identification and classification of surface targets, during the data fusion process. This approach aims to optimize the construction of a maritime tactical picture by applying a grade of trust to the target’s identity and classification declaration. It also proportionates a simple structure suitable for modification and validation of rules, according to the mission’s political and military objectives. It was observed a better interpretation of the information with the FDT structure and the application of a grade of trust to the target’s identity declaration improved the priority definition to send a helicopter for visual identification. Keywords Data fusion. Fuzzy Decision Table. Tactical Picture. 38 1. INTRODUÇÃO Nas operações navais, a detecção, a classificação e a identificação antecipada das forças hostis e das possíveis ameaças impostas são decisivas para a avaliação da situação tática de uma Força Naval. Esta avaliação, segundo Ly et al. (2003), é um processo de interpretação da situação utilizando informações incompletas, haja vista que há um espaço considerável entre as informações disponíveis e as informações necessárias para a obtenção de uma avaliação da situação tática confiável. O processo decisório, neste contexto, é uma atividade complexa e influenciada pela incerteza da detecção, do acompanhamento, da classificação e da identificação dos contatos existentes no cenário marítimo. A classificação de um contato de superfície consiste em designar o tipo da embarcação (pesqueiro, mercante ou militar) e a identificação traduz se a embarcação é amiga, inimiga ou neutra, de acordo com Heuvelink e Both (2007). Conforme a complexidade e a incerteza aumentam devido à presença de múltiplos contatos, o emprego de um sistema especialista que apoie à decisão de associação, classificação e identificação dos contatos provenientes de múltiplos sensores é cada vez mais necessário, visando a minimizar o impacto das limitações humanas neste processo, no entender de Oliveira e Belderrain (2008). As limitações humanas decorrem da incapacidade de considerar muitas interpretações possíveis em paralelo dos contatos, bem como a resistência em alterar a classificação de um contato avaliado anteriormente. A configuração mínima requerida de um sistema especialista consiste de uma base de conhecimento, REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 38-48 PROCESSOS DECISÓRIOS um procedimento de inferência e uma base de dados, segundo Francioni e Kandel (1988). A base de conhecimento contém os fatos e heurísticas que representam o conhecimento humano. O procedimento de inferência são estruturas de controle que utilizam a base de conhecimento para a solução dos problemas impostos ao sistema especialista que pode ser representada por regras no formato IF-THEN. A base de dados representa a memória do sistema referente ao acompanhamento do status do problema. No cenário marítimo, o desafio consiste em projetar ou estruturar uma base de conhecimento de modo a facilitar a modificação e a validação das regras de acordo com os objetivos políticos e militares da missão. Atualmente na Marinha do Brasil (MB), as respostas pré-planejadas (PREPLAN) e as regras de engajamento, que compõem algumas diretivas, servem como base de conhecimento para facilitar o processo decisório em todos os níveis, do comandante do navio ao vigia, de modo que, para cada possível situação específica, haja um procedimento claro e simples que possa ser adotado. Contudo, estas regras não estão inseridas em uma estrutura que possibilite a aplicação em um sistema especialista de apoio à decisão. O emprego destas regras esbarram na limitação humana para o processamento de múltiplas hipóteses considerando múltiplos contatos. Este estudo propõe a utilização das tabelas de decisão fuzzy (TDF), como uma estrutura para a construção das regras de um sistema a base de conhecimento, para apoiar a classificação e identificação de alvos de superfície, durante o processo de fusão de dados. Esta abordagem visa a otimizar a compilação do quadro tático marítimo com a atribuição do grau de confiança na declaração de classificação e identificação do contato. Além disso, proporciona uma estrutura simples e adequada para modificação e validação da base de regras de acordo com os objetivos políticos e militares da missão. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 38-48 2. METODOLOGIA 2.1. Fusão de Dados No cenário marítimo, o processo de fusão visa a transformar os acompanhamentos de um mesmo contato observado e reportado para o sistema por diferentes dispositivos de entrada (RADAR e outras fontes/sensores) em um único acompanhamento resultante. Além disso, ele possibilita a realização de inferências e a obtenção de mais informações sobre o contato em comparação à análise dos acompanhamentos do mesmo reportado pelas fontes ou sensores isoladamente. Este acompanhamento resultante pode ser associado a uma plataforma e representado no sistema por um único número de acompanhamento e por uma única marca de acompanhamento referente à classificação e à identificação daquela plataforma associada. Nashman (1993) classificou as interações estabelecidas entre os dados provenientes das múltiplas fontes em três categorias: interações competitivas, complementares e cooperativas. A interação competitiva é definida como a relação entre as fontes que observam o mesmo objeto adquirindo informações redundantes que não contribuem com qualquer conhecimento adicional para o sistema. A integração das fontes competitivas resulta em um incremento da confiança na validade da informação extraída quando existe uma relação entre os dados adquiridos e na redução da confiança quando nenhuma relação existe. A interação complementar ocorre quando duas ou mais fontes obtêm informação do mesmo contato, contudo as características dos dados adquiridos por cada sensor são complementares. Nesse caso, cada sensor fornece informação parcial de determinadas características do ambiente. A interação cooperativa ocorre quando as observações de uma ou de mais fontes guiam os processos de uma outra fonte. 39 CLEBER ALMEIDA DE OLIVEIRA, KARL HEINZ KIENITZ, MISCHEL CARMEN N. BELDERRAIN A Figura 1, adaptada de Hall e McMullen (2004), descreve a arquitetura de um sistema de fusão de dados. O bloco de alinhamento consiste na orientação dos dados de modo que as informações de cada sensor sejam traduzidas e convertidas por meio dos respectivos protocolos para métricas comuns e alinhadas de acordo com a definição da janela de tempo dos dados a serem considerados. A definição da janela de tempo aplicada ao banco de dados de acompanhamento depende da taxa de atualização dos dados dos sensores e da mudança relativa da posição do contato entre as atualizações. Como a velocidade de cruzeiro das plataformas marítimas são baixas e o valor modal gira em torno de 8 nós, pode-se afirmar que se for utilizada uma taxa alta de 1 minuto praticamente não haverá mudanças na posição das unidades móveis. O bloco de gating visa a eliminar a comparação par a par de observações inapropriadas, criando uma janela em torno das variáveis de posição do objeto a ser comparado, segundo Blackman (1986). O bloco de associação de dados consiste na aplicação do algoritmo de associação, considerando os registros dos dados dos sensores acessíveis no bloco de ar mazenamento (banco de dados). O vetor de estado final pode ser dividido em dois segmentos: vetor de estado de posição e vetor de estado de classificação e estimação da identidade do contato. Na figura 1 estes segmentos são ilustrados pelos blocos vetor de estado e estimação de identidade, respectivamente. Hall e McMullen (2004), Blackman (1986), BarShalom e Blair (2000) descrevem diversas maneiras para a estimação do vetor de estado de posição. Entretanto, como este problema não se insere no escopo deste trabalho, as observações do sensor com a menor incerteza serão escolhidas para a estimação do vetor de estado de posição. A vantagem deste procedimento de estimação do vetor de estado de posição é que nenhuma composição de dados é efetuada, reduzindo, assim, o tempo de processamento. FIGURA 1 Arquitetura de um sistema de fusão de dados. 40 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 38-48 PROCESSOS DECISÓRIOS O vetor de estado de classificação e estimação da identidade do contato envolve o conceito de fusão de declaração de identidade. Este conceito visa a transformar os atributos observados de um mesmo contato por múltiplos sensores em um rótulo ou marca de acompanhamento que descreva ou nomeie a classificação e identificação daquele contato. No contexto deste estudo, os atributos representam os dados que podem ser úteis no processo de classificação e identificação do contato. Por exemplo, os seres humanos podem reconhecer seus pares por meio de um processo de abstração, que pode evidenciar atributos distintos como movimentos característicos (visão), tonalidade da voz (audição), características faciais (tato e visão) etc. A composição destes atributos distintos corrobora para a identificação do indivíduo. Na prática, a fusão de posição e a fusão das declarações de identidade podem ocorrer simultaneamente. Obviamente, a forma de compor esta fusão depende do tipo dos sensores envolvidos no processo. Conceitualmente, a fusão das declarações de identidade poderia ser realizada da mesma forma que a fusão de posição, contudo, existem algumas dificuldades neste processo, tais como: a) os modelos físicos para a declaração de identidade, de uma forma geral, não existem ou são muito difíceis de serem desenvolvidos (ex: modelar o retorno da seção reta radar de um navio versus ângulo de aspecto do mesmo); b) a identidade possui um aspecto hierárquico. Assim, em um nível de inferência baixo, os objetos a serem identificados podem incluir emissores individuais (RADAR, rádios etc) ou entidades físicas (motor, engrenagem redutora ou número de pás de hélice). Em um nível de inferência alto, a identidade de uma força naval pode ser declarada, embora esta identificação não se estenda a cada navio componente. Em face destas dificuldades, sistemas baseados em conhecimento são utilizados para processar as observações dos sensores, considerando uma base de regras construída a priori de modo a possibilitar a declaração da classificação e da identidade de um contato. Diversas estruturas podem ser empregadas visando a alcançar uma conclusão válida de classificação, tais como lógica booleana, árvore de decisão, tabela de decisão, lógica fuzzy etc. A Figura 2 ilustra o conceito de declaração de identidade baseado em conhecimento. FIGURA 2 Conceito de declaração de identidade baseado em conhecimento REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 38-48 41 CLEBER ALMEIDA DE OLIVEIRA, KARL HEINZ KIENITZ, MISCHEL CARMEN N. BELDERRAIN Heuvelink e Both (2007), no estudo de simulação de compilação cognitiva de quadro tático, elucidaram algumas das heurísticas dos especialistas que facilitam a declaração de classificação e de identidade dos contatos na compilação do quadro tático marítimo. Estas heurísticas foram transformadas nas seguintes tarefas a serem cumpridas pelo decisor: a) observar comportamentos que definam a classificação do contato (ex: velocidade do contato e se o contato abriu fogo); b) relacionar a observação do comportamento com as informações do setor de inteligência e do ambiente (ex: rumo e velocidade condizentes com a rota de navegação daquele trecho, distância e setor da detecção do contato coerentes com o tamanho e direção da ameaça esperada e, ainda, expectativa de rumo e velocidade do tráfego mercante informada pelo setor de inteligência; c) observar todos os atributos no tempo (ex: padrão de navegação e variação de velocidade) e d) verificar se as informações coletadas são suficientes para identificar um contato como inimigo. Além dessas tarefas, deve, ainda, o decisor selecionar a melhor ação (ex: priorizar o esclarecimento aéreo para reduzir a incerteza de ameaça ao máximo). Na MB, tarefas semelhantes são enunciadas nas respostas pré-planejadas (PREPLAN) e nas regras de engajamento inseridas em algumas diretivas. Essas regras são elaboradas para facilitar o processo decisório em todos os níveis, do comandante do navio ao vigia, de modo que, para cada possível situação específica, haja um procedimento claro e simples que possa ser adotado. Além disso, essas regras visam a harmonizar as ações com os objetivos políticos e militares da missão. de regras que podem ser utilizadas como subsídios para a implementação de um sistema especialista de apoio à classificação e identificação de contatos. Neste contexto será apresentada a extensão fuzzy da tabela de decisão como ferramenta de estruturação lógica do conhecimento. 2.2. Tabela de Decisão Fuzzy A tabela de decisão (TD) é uma ferramenta de estruturação lógica, desenvolvida nos anos 60 (Cantrell et al., 1961), que utiliza uma representação tabular para descrever e analisar decisões situacionais de uma forma simples, por meio do estabelecimento de um conjunto de condições que direciona a execução de um conjunto de ações (Tabela 1). Assume-se que a tabela de decisão seja caracterizada por n condições Ci (i = 1, 2, ..., n) e m ações Aj (j = 1, ..., m). Cada TD é composta de quatro quadrantes: conjunto de condições [Ci], conjunto de ações [Aj], espaço de condições (CSi) e espaço de ações (ASj). O conjunto de condições consiste de todas as condições ou atributos relevantes que influenciam o processo decisório. O espaço de condições especifica todas as possíveis combinações de estado de uma condição. O conjunto de ações contém todas as ações que o decisor pode tomar e, por fim, o espaço de ações que contém a categorização de todos os possíveis estados de uma ação. A relação vertical entre o espaço de condições e o espaço de ação produz as regras de decisão. TABELA 1 Estrutura de uma tabela de decisão Em resumo, o conceito de fusão das declarações de identidade é fundamental para a avaliação tática de uma força naval. Entretanto, em virtude de dificuldades na modelagem dos modelos físicos para o processo de declaração de identidade, observa-se uma tendência na utilização de sistemas baseados em conhecimento. As PREPLAN e as regras de engajamento da MB constituem uma base 42 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 38-48 PROCESSOS DECISÓRIOS Pode-se interpretar uma regra como “IF (CS1 and CS2 and ... and CSn) THEN (AS1 and AS2 and ... and ASm)”. “A tabela de decisão fuzzy (TDF) é uma extensão da TD de modo a considerar situações em que a decisão é baseada em condições e ações incertas, vagas e imprecisas na estruturação de modelos de raciocínio aproximado” (Francioni e Kandel, 1988). A extensão compreende a introdução de conjuntos fuzzy nos espaços das condições e ações de uma TD. A nebulosidade das informações nas condições aparece em expressões como “variação grande de velocidade no tempo” e nas ações em expressões como “atribuir alta possibilidade de ser um alvo hostil”. Os termos destacados, em negrito, ressaltam os aspectos nebulosos de tais assertivas. Chen et al. (1995) definiram a atribuição de uma medida de valor de pertinência em uma tabela de decisão da seguinte forma: Seja Ci uma condição pertencente ao conjunto de condições (i = 1, ..., n), CSi seja um conjunto de estados de condições Sik (k = 1, ..., si; i = 1, ...,n), onde Sik é uma expressão lógica nebulosa, Aj seja uma ação pertencente ao conjunto de ações (j = 1, ..., m) incorporando termos linguísticos e conjuntos fuzzy, e ASj = {Verdadeiro (x), Falso (-), nulo (.)} seja um estado de ação. Então, uma TDF é uma função de CS1 x CS2 x ... x CSn para AS1 x AS2 x ... x ASm de modo que cada combinação de condições possíveis seja mapeada para a configuração de uma ação. Todas as decisões situacionais são apresentadas por meio das colunas da tabela, facilitando a verificação de requisitos importantes tais como a consistência e a completitude. Uma TDF é dita completa se para qualquer combinação de condições existir pelo menos uma coluna na qual a combinação seja um valor maior do que zero. A propriedade de exclusividade é relaxada em uma TDF podendo haver mais de coluna ativada. “Todas as interpretações de uma TDF devem ser realizadas no nível de cada regra de decisão” REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 38-48 (Wets et. al., 1996). Uma TD é um caso especial de uma TDF. Originalmente uma TD era utilizada para construir lógica de programas. Na última década, entretanto, a ênfase na utilização de uma TD passou a ser a forma simples de representar as situações de decisão complexas, a facilidade de verificação da completitude, exclusividade e correção na geração do conhecimento. Neste contexto, na próxima seção, deste estudo serão apresentados os resultados da aplicação de TDF para a classificação de contatos, baseado em um estudo ilustrativo no cenário marítimo. 3. RESULTADOS O cenário ilustrado na Figura 3 representa os contatos obtidos, em um determinado intervalo de tempo (Tn), pelas fontes A, B, C e D de um navio de guerra. A camada de informação produzida por meio das varreduras de cada sensor constitui o grau de percepção do ambiente monitorado pelos sensores. Considera-se que a fonte A seja os dados de um sensor ativo (RADAR); a fonte B seja os contatos obtidos pelo Automatic Identification System (AIS); a fonte C seja os relatórios de inteligência (INFOPE etc) do tráfego de embarcações neutras na área e a fonte D seja o sensor passivo de Medida de Apoio a Guerra Eletrônica (MAGE). O AIS é um sistema de identificação automática, especificado pela International Maritime Organization (IMO), de emprego obrigatório por todos os navios com arqueação bruta acima de 300 toneladas envolvidos em viagens internacionais, navios de passageiros e navios de carga com mais de 500 toneladas. Este sistema opera na faixa da banda VHF (Very High Frequency) com protocolo aberto e sua finalidade é disseminar informações do navio como posição GPS (Global Positioning System), rumo, velocidade, nome da embarcação, indicativo internacional etc., automaticamente sem a interferência da tripulação e com uma taxa de envio dos dados em torno de 2s. Entretanto, esse sistema possui algumas desvantagens e 43 CLEBER ALMEIDA DE OLIVEIRA, KARL HEINZ KIENITZ, MISCHEL CARMEN N. BELDERRAIN limitações tais como: grande dependência do sistema GPS, possibilidade de transmissão de dados corrompidos ou incorretos e possibilidade de uso das informações AIS para confusão ou pirataria marítima. O MAGE realiza ações para buscar, interceptar, monitorar, localizar, gravar/registrar, avaliar e analisar a energia eletromagnética irradiada, para reconhecer, rapidamente, a fonte de emissão, explorando-a para proveito das operações táticas. Observa-se, na Figura 3, que há redundância de informações de determinados contatos e que existem contatos só observáveis por um determinado sensor. Na situação ilustrada, o contato 1 é reportado pelas fontes B, C e D; o contato 4 e 5 são reportados pelas quatro fontes; o contato 6 é reportado apenas pela fonte A; os contatos 2, 3, e 7 embora tenham sido reportados pela fonte B, não foram assinalados pelo setor de inteligência e os contatos 2 e 6 não tiveram suas emissões radar observadas pela fonte D. As fontes A, B e C possuem determinado grau de incerteza referente às informações de posição dos seus contatos que podem ser representados por elipses. A resultante do processo de fusão de dados considerando as camadas de informações competitivas produzidas por meio das varreduras de cada sensor é mostrada na parte direita da Figura 3, denominada de estado Tn. Uma vez efetuada a estimação do vetor de posição, minimizando a redundância de informações, o foco do problema de decisão passa a ser a declaração de identidade a ser atribuída a cada um dos contatos físicos observados e determinar qual a prioridade de esclarecimento necessária para o referido contato. As tarefas descritas por Heuvelink e Both (2007), as PREPLAN e as regras de engajamento da MB constituem heurísticas a serem utilizadas como subsídios para a estruturação da base de conhecimento, por meio da TDF, que represente as regras de decisão de situações complexas observadas no cenário marítimo. A estruturação do conhecimento está dividida em duas fases: a primeira consiste em construir uma FIGURA 3 Representação de contatos nas camadas dos sensores 44 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 38-48 PROCESSOS DECISÓRIOS TDF que possibilite efetuar alguma inferência quanto à classificação primária dos contatos com base no processo de fusão de dados das fontes envolvidas e a segunda, em compor um TDF que expresse condições e ações descritas nas heurísticas de especialistas que facilitem a declaração de identidade. A Figura 4 ilustra a ontologia do processo modelado para a declaração de identidade. A Tabela 2 apresenta a TDF construída na primeira fase. Esta estrutura visa à obtenção do grau de confiança em classificar o contato como mercante baseado no processo de fusão das fontes envolvidas. Observa-se que as condições nesta fase são do tipo binária (booleana) e que a associação do contato com as informações de inteligência (fonte C) e de dados do AIS (fonte B) favorecem a elevação de confiança na classificação do contato, conforme pode ser observado nas regras 1 a 6. A pertinência a ser atribuída nas ações envolvendo tais associações deve refletir o nível de serviço dos disseminadores das informações de inteligência. Considerando X como o espaço de combinações das condições descritas na Tabela 2, podem-se definir os conjuntos nebulosos Mercante Alta (MA), Mercante Média (MM) e Mercante Baixa (MB) como os conjuntos de pares ordenados discretos MA={(x, µMA(x))|xεX}, MM={(x, µMM(x))|xεX} e MB={(x, µMB(x))|xεX}, respectivamente. Onde µMA(x), µMM(x) e µMB(x) são os graus de pertinência, com valores entre 0 e 1, definido para cada elemento de x pertencente ao conjunto X. Estas funções de pertinência poderiam ser expressas da seguinte forma: µMA(x)={([1 1 1], 1); [1 1 0], 0,9); [1 0 1], 0,8); [0 1 1], 0,9)} (1) µMM(x) ={([1 0 0], 0,5); [0 1 0], 0,6)} (2) µMB(x) ={([0 0 1], 0,2); [0 0 0], 0,1)} (3) A Tabela 3, a seguir, apresenta a TDF construída na segunda fase. Esta estrutura visa à obtenção do grau de confiança na classificação do contato baseado nas heurísticas representadas pelas condições e ações enunciadas. Observa-se que as condições são representadas por conjuntos fuzzy. FIGURA 4 Ontologia do processo modelado Podem-se definir os conjuntos nebulosos velocidade no tempo (VT), rumo no tempo (RT) e distância (D) como os conjuntos de pares ordenados VT={(x, µ VT (x))|xεX}, RT={(x, µRT(x))|xεX} e D={(x, µD(x))|xεX}, respectivamente. Onde, µVT(x), µRT(x) e µD(x) são os graus de pertinência, com valores entre 0 e 1, definido para cada elemento de x pertencente ao conjunto X. Estas funções de pertinência poderiam ser expressas da seguinte forma: TABELA 2 Tabela de decisão fuzzy 1ª fase REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 38-48 45 CLEBER ALMEIDA DE OLIVEIRA, KARL HEINZ KIENITZ, MISCHEL CARMEN N. BELDERRAIN µVT(x) = (1+0,045(x)2)-1 (4) µRT(x) = (1+0,0009(x)2)-1 (5) µD(x) = 0,4 *(x/20) (6) A partir da TDF apresentada na Tabela 3, podemse extrair algumas inferências que possibilitem reduzir o número de regras. O simples fato de um contato possuir alta variação de velocidade ou de rumo no tempo pode traduzir um comportamento suspeito da embarcação que associado a outras condicionantes pode identificá-lo como provável hostil. A diferença entre provável hostil e possível hostil no cenário naval é semântica sendo o primeiro sempre mais perigoso que o segundo. A Tabela 4, a seguir, consolida as regras de decisão, conforme o conjunto de condições observadas, e enuncia o processo de inferência realizado. A aplicação dessas regras no cenário ilustrado na Figura 3, considerando as funções de pertinência descritas nas equações 1 a 6, permite a declaração de identidade dos contatos observados com a atribuição do grau de confiança, conforme apresentado na Figura 5, a seguir. Observou-se uma melhor interpretação das informações por meio da estrutura da TDF e a atribuição do grau de confiança na declaração de identidade do contato aprimorou a definição de prioridade para o envio de helicóptero para a identificação visual. 4. CONCLUSÕES Os benefícios operacionais obtidos com a estruturação do conhecimento por meio da TDF, no contexto do processo de apoio à decisão, são significativos. Os resultados alcançados com a aplicação do algoritmo atendem aos objetivos propostos de otimizar o processo de classificação e identificação de contatos na compilação de quadro tático marítimo. Além disso, a estruturação do conhecimento de forma tabular facilita a modificação e a validação das regras de acordo com os objetivos políticos e militares da missão. A atribuição do grau de confiança na declaração de identidade e a priorização do esclarecimento permitem uma melhor visualização das informações pelo decisor, otimizando, assim, o processo decisório de uma maneira global. TABELA 3 Tabela de decisão fuzzy 2ª fase 46 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 38-48 PROCESSOS DECISÓRIOS TABELA 4 Consolidação das regras de decisão FIGURA 5 Plotagem com declaração de Identidade REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 38-48 47 CLEBER ALMEIDA DE OLIVEIRA, KARL HEINZ KIENITZ, MISCHEL CARMEN N. BELDERRAIN REFERÊNCIAS BAR-SHALOM, Y. e BLAIR, W. D.. Multitarget-multisensor tracking: applications and advances. Artech House radar library, Los Angeles , 2000. [1] BLACKMAN, S. S.. Multiple target tracking with radar application. Artech House, Norwood, MA, 1986. [2] CANTRELL, H. N; KING, J. e KING, F. E. H.. Logic structure tables design. Comm. ACM, June 1961, pp. 272-275. [3] CHEN, G. Q.; VANTHIENEN, J. e WETS, G.. Fuzzy decision tables: extending the classical formalism to enhance intelligent decision making. International Joint Conference of 4th IEEE International Conference on Fuzzy Systems and the 2nd International Fuzzy Engineering Symposium (FUZZ-IEEE/ IFES’95) 1995, pp. 599-606. [4] FRANCIONI, J. M. e KANDEL, A.. A software engineering tool for expert system design. IEEE Expert, Spring 1988. Vol. 3, Issue 1, pp. 33-41. [5] HALL, D.L. e MCMULLEN, S. A. H.. Mathematical techniques in multisensor data fusion. Artech house publishers, Boston, 2004. 48 [6] HEUVELINK, A. e BOTH, F.. BOA: A cognitive tactical picture compilation agent. IEEE/WIOC/ACM International Conference on Intelligent Agent Technology, 2007. pp. 175-181. [7] LY, T. C.; GREENHILL, S.; VENKATESH, S e PEARCE, A.. Multiple hypotheses situation assessment. IEEE Proceedings of the Sixth International Conference of Information Fusion, 2003.Vol 2, pp.972 - 978. [8] NASHMAN, M.. The Use of Vision and Touch Sensors for Dimensional Inspection Tasks. The American Society of Mechanical Engineers, 1993. Manufacturing Review, No. 6, pp.155-162. [9] OLIVEIRA, C.A. e BELDERRAIN, M.C.N.. Aplicação da lógica fuzzy para a fusão de dados de acompanhamento de plataformas no cenário marítimo. Revista Pesquisa Naval, 2008. Nº 21, pp. 49-57. [10] W E T S, G. ; W I T L OX , F. ; T I M M E R M A N S, H . ; VANTHIENEN, J.. A fuzzy decision table approach for business site selection. Proceedings of the Fifth IEEE International Conference on Fuzzy Systems, 1996.Vol 3, pp.1605 – 1610. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 38-48 SENSORES, GUERRA ELETRÔNICA E GUERRA ACÚSTICA Acompanhamento de Alvos-Radar utilizando filtragem de Kalman e vetor de estados com dimensão variável José Ricardo Potier de Oliveira, M.Sc. Grupo de Sistemas Digitais Instituto de Pesquisas da Marinha (IPqM), Rio de Janeiro, RJ, Brasil. E-mail: [email protected] Resumo Este trabalho consiste em um estudo comparativo entre o desempenho de dois sistemas de acompanhamento de alvos detectados por radar baseados em filtros de Kalman. Um deles é atualmente utilizado em navios da Marinha do Brasil. A modelagem matemática deste sistema de acompanhamento foi revista e é aqui utilizada como referência para a comparação com uma modelagem alternativa. Esta segunda modelagem possui, como principal característica, vetor de estados com dimensão variável, em função da ausência ou da presença de aceleração no movimento do alvo. Resultados de análises realizadas com dados simulados demonstram a viabilidade e as vantagens de utilização deste modelo. Palavras-chave Filtro de Kalman. Filtro de Acompanhamento. Acompanhamento de Alvos. Target-Tracking Radar Using Kalman Filtering and Vector States with Variable Size Abstract This work presents a comparative study between the performance of two systems for monitoring targets detected by radar-based Kalman filters. On of them is currently being used on several ships in the Brazilian Navy. Mathematical modeling of this monitoring system has been revised and is used here as a reference for a comparison with an alternative model. This second model has, as its main characteristic, state vector with variable dimension, depending on the presence or absence of acceleration in the movement of the target. Results of tests with simulated data demonstrate the viability and advantages of using this model. Keywords Kalman Filter. Tracking Filter. Target Tracking. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 49-55 1. INTRODUÇÃO O objetivo deste trabalho é contribuir com a pesquisa e com o desenvolvimento de filtros de acompanhamento de alvos, presentes em qualquer sistema de acompanhamento de alvos-radar. A determinação dos parâmetros cinemáticos de um alvo e a predição de sua posição, em uma próxima varredura do radar, são informações importantes para o auxílio à navegação, para a vigilância, para o controle tático e para o controle de armamentos. A t u a l m e n t e, o s m o d e r n o s s i s t e m a s d e acompanhamento de alvos, tanto os de uso civil quanto os de uso militar, são comumente baseados em filtros de Kalman, que atuam como estimadores de posição e velocidade do alvo. No entanto, detalhes de implementação destes filtros não são divulgados por motivos de ordem econômica e estratégica. O presente estudo tem por objetivo comparar dois modelos de filtros de acompanhamento. O primeiro modelo, chamado, aqui, de modelo convencional, é empregado no sistema de acompanhamento desenvolvido pelo IPqM em parceria com empresas e atualmente é usado em diversos navios da Marinha do Brasil. O outro modelo, também objeto deste estudo, é chamado, aqui, de modelo combinado. A diferença básica entre os dois modelos reside no vetor de estados do filtro de Kalman. O modelo convencional utiliza as informações de posição e velocidade, esta decomposta segundo os eixos cartesianos, em todo o tempo do acompanhamento. Este modelo aposta em poucas mudanças na cinemática do alvo e na capacidade 49 JOSÉ RICARDO POTIER DE OLIVEIRA do filtro de Kalman em recuperar-se diante de uma eventual mudança nesta cinemática [1], como uma manobra de guinada. O modelo combinado leva em consideração a mudança da cinemática do alvo acompanhado e, para tal, incorpora duas representações internas desta cinemática, uma para alvos em movimento retilíneo uniforme (MRU), para a qual o vetor de estados do filtro é o mesmo do modelo convencional. A outra é para alvos manobrantes, onde o vetor de estados inclui a informação de aceleração (além da posição e velocidade) [2, 11]. Além disso, o desenvolvimento matemático do modelo combinado também preenche alguns pontos de incongruência detectados na modelagem matemática do modelo convencional. Tais características conferem ao modelo combinado um maior rigor matemático na descrição da cinemática do alvo acompanhado. Tanto o modelo convencional quanto o combinado utilizam técnicas de detecção de manobra para se adaptarem à mudança na dinâmica do alvo acompanhado. A diferença é que o modelo convencional reinicializa o filtro ou partes dele, ao detectar a manobra do alvo [1], e o modelo combinado realiza o chaveamento interno entre os dois filtros de Kalman [2]. 2. FORMULAÇÃO DO PROBLEMA 2.1. Modelagem do sistema de acompanhamento Sistemas de acompanhamento são, em geral, baseados no filtro de Kalman, cuja teoria pode ser amplamente acessada em publicações diversas e pela Internet [3, 4, 5]. Um filtro de Kalman é um estimador linear do estado de um sistema, que busca minimizar uma função custo (erro médio quadrático da estimação) por meio de uma solução recursiva. A técnica considera um sistema dinâmico linear e discreto no tempo (intervalo de tempo T entre amostras), perturbado por adição de ruído branco (η) com distribuição de probabilidade Gaussiana e representado pela equação vetorial, denominada equação do processo: 50 (1) onde s(n) é o vetor de estados de dimensão N×1; A(n) é a matriz de transição de estados de dimensão N×N; η(n) é o vetor (N×1) de ruído de processo. A equação (1) define a dinâmica do sistema, onde N é o número de variáveis de estado e é aplicável tanto no caso do modelo convencional quanto no caso do modelo combinado. Neste último, estamos interessados em modelar a dinâmica do alvo acompanhado em duas situações distintas: alvo em movimento retilíneo uniforme (MRU) ou alvo em manobra. A diferença entre as duas situações é a ausência ou a presença de aceleração. Este trabalho se limitará a apresentar algumas características fundamentais do modelo combinado, não detalhando a implementação do modelo convencional. Maiores detalhes da implementação dos modelos combinado e convencional podem ser vistos em [6]. Definindo posição, velocidade e aceleração como os estados do sistema, decompostos segundo os eixos cartesianos, definem-se as equações do processo, em forma matricial são: Caso 1 : (2) A equação (2) considera que, no MRU, o ruído de processo é visto como uma perturbação da velocidade, que deveria ser constante, caracterizando a presença de uma aceleração, representada pela segunda parcela da soma. Caso 2 com manobra: REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 49-55 SENSORES, GUERRA ELETRÔNICA E GUERRA ACÚSTICA ter seus parâmetros ajustados visando controlar o desempenho do filtro. (3) A equação (3) considera que, neste caso, o ruído de processo está representando uma perturbação na própria aceleração, que já faz parte da dinâmica do alvo acompanhado, já presente no vetor de estados. Para ambos os casos (alvo em MRU e alvo em manobra) a equação do processo é dada por: (4) que é uma variante da equação (1). Uma integrante do processo recursivo do filtro de Kalman é a chamada matriz de covariância do ruído de processo, calculada como onde E{.} é o operador Valor Esperado. , que fornece parâmetros que podem ser ajustados permitindo controlar o desempenho do filtro. Teremos, portanto, também duas matrizes de covariância do ruído de processo, uma para cada caso considerado. Voltando ao sistema dinâmico linear, discreto no tempo e descrito pela equação de processo (4), este tem alguns de seus estados medidos, o que nos leva a chamada equação das medidas (ou observações), assim definida: (5) onde z(n) é o vetor das medidas (ou observações) de dimensão P×1; H(n) é a matriz (P×N) de observação; ω(n) é o vetor (P×1) de ruído de medida. , é denominada matriz de covariância do ruído de medida, que também pode REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 49-55 Uma questão que logo surge é a possibilidade de se usar somente o modelo aumentado para realizar a estimação, independentemente da natureza do movimento do alvo, já que o modelo convencional é um caso particular do modelo aumentado. As matrizes de covariância dos ruídos de processo e medida (Q e R respectivamente) são usadas para atuar no desempenho do filtro de estimação, especializando cada filtro em um tipo de dinâmica. Assim, o modelo para alvos em manobra não tem um bom desempenho quando usado para estimação das variáveis de estado de alvos em MRU. As medidas que podemos realizar dos alvos em movimento são por meio do radar, que fornece apenas a posição do alvo em coordenadas polares (distância e marcação). Como o vetor de estados s é definido com posição dada em coordenadas cartesianas, a equação das medidas torna-se não linear, uma vez que a relação entre coordenadas polares e cartesianas envolve o uso da equação (6): (6) são a distância e a marcação onde (acrescidas de ruído de medida) respectivamente. ωD e ωθ são os ruídos de medida envolvendo distância e marcação. E px e py são as coordenadas cartesianas da posição. O filtro de Kalman empregado, tanto no modelo convencional quanto no combinado, é o filtro de Kalman Estendido [7]. Este filtro é uma das técnicas mais conhecidas, mas não a única, empregada nos casos em que se trabalha com equações não lineares, como é o caso da equação (6), que pode ser escrita como: (7) 51 JOSÉ RICARDO POTIER DE OLIVEIRA onde fH[.] é uma função não linear das variáveis de estado. A técnica consiste em fazer uma linearização da função no entorno da estimativa corrente, utilizando uma expansão de 1ª ordem da série de Taylor da função fH. 2.2. Detecção de manobra Em ambos os modelos, a detecção de manobra se faz necessária para que o sistema tome uma decisão. No caso do modelo convencional a detecção de manobra faz com que o filtro seja reinicializado, em parte ou ao todo, buscando adequar as suas estimativas à realidade da dinâmica do alvo. Já o modelo combinado precisa detectar o início e o fim de uma manobra, a fim de realizar o chaveamento entre os dois filtros que tratam os casos de MRU e de movimento com aceleração e, em ambos os modelos, a detecção de manobra é feita por meio de um critério estatístico que valida ou não a estimação feita pelo filtro. O melhor método é analisar a evolução do erro de estimação segundo algum critério, que pode ser o critério do Erro Médio Quadrático. Em um ambiente real as medidas e as suas estimativas são os únicos dados que temos disponíveis para certificar a consistência do estimador (não temos acesso à todas as variáveis de estado). Portanto, sendo z(n) o vetor de medidas (distância e a sua estimativa feita pelo marcação) e filtro, define-se a inovação ζ(n) como sendo a diferença entre o valor medido e a sua estimativa: . Desta forma, como critério para validação de um filtro estimador de estado em um ambiente real, devemos realizar uma análise no comportamento da inovação. Pode-se construir uma variável aleatória (VA) a partir da inovação ζ admitindo-se que a inovação ζ possua distribuição Gaussiana com média zero (condição de não polarização) e uma matriz de covariâncias S, ou seja, ζ~N(0, S). Seja uma VA escalar. Ela pode ser reescrita como . 52 Fazendo-se , demonstra-se [5, 6] que u é um vetor de VAs Gaussianas padronizadas e, consequentemente, é uma VA com distribuição Qui-quadrado, que pode ser usada no seguinte teste de validação do filtro: se o filtro passa a estimar o estado com erro crescente, x tende a aumentar. Um teste de hipóteses pode ser usado para se estabelecer um limiar de até quanto a estimação do filtro é confiável. Então. este teste é usado para determinar quando um alvo passa a executar uma manobra, pois, nesse caso, ocorre um crescente erro na estimação. Um teste de natureza semelhante é usado para determinar o fim da manobra. 3. METODOLOGIA EMPREGADA Para a realização dos testes foram utilizados dados simulados produzidos por um gerador de trajetórias, escrito em MatLab®. Neste gerador o usuário pode determinar a trajetória do alvo, sua velocidade e o ângulo da manobra, permitindo a simulação de diversos tipos de situações de manobras. O estudo comparativo entre o modelo convencional e o modelo combinado foi realizado com base na utilização de dois simuladores, também escritos em MatLab1. Um deles, que representa o modelo convencional, é capaz de reproduzir os mesmos resultados obtidos do equipamento real, se ambos forem alimentados com os mesmos dados gerados pelo gerador de trajetórias descrito no parágrafo anterior. O outro, representando o modelo combinado, gera os resultados a partir desta modelagem que queremos estudar. Na Seção 4, deste estudo, são apresentados alguns gráficos mostrando o resultado das simulações feitas a partir dos dois modelos. 1 The MathWorks, Inc. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 49-55 SENSORES, GUERRA ELETRÔNICA E GUERRA ACÚSTICA 4. RESULTADOS Alguns resultados de testes de laboratório, realizados com dados simulados e com alguns poucos dados reais disponíveis, comparando os dois modelos, evidenciam que o modelo combinado responde mais rapidamente à mudança de dinâmica do alvo, com melhores estimativas de posição. A Figura 1 mostra um alvo simulado com velocidade de 15 nós, realizando manobra de 90°. A Figura 2 compara os erros de estimação da posição para ambos os modelos. Uma filtragem pode ser feita em cima da estimação de velocidade realizada pelo modelo combinado, para amenizar a instabilidade. A Figura 4, a seguir, mostra a simulação de um alvo a 23 nós, realizando uma manobra de 200°. Nesta figura podemos observar, além da demora na percepção da manobra por parte do modelo convencional, a polarização que permanece nas estimativas de posição após a manobra. O modelo combinado responde mais rapidamente à manobra FIGURA 2 Erro de estimação de posição A velocidade estimada pelos dois modelos pode ser vista na Figura 3. Nota-se que, nesse caso, a velocidade estimada pelo modelo convencional é mais estável do que a estimada pelo modelo combinado. Isto se deve ao fato de o modelo convencional estar ajustado com valores de covariâncias de ruído de medida que lhe conferem um maior peso as suas próprias estimativas do que às medidas, garantindo a maior estabilidade na estimação de velocidade, porém, causando uma maior demora no reconhecimento da manobra. FIGURA 1 Trajetória de alvo a 15 nós. FIGURA 3 Velocidade estimada REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 49-55 53 JOSÉ RICARDO POTIER DE OLIVEIRA do alvo e permanece com boas estimativas de posição após a manobra. FIGURA 4 Trajetória de alvo a 23 nós. Também, nesse caso, a velocidade estimada pelo modelo convencional é mais estável do que a estimada pelo modelo combinado, sugerindo a necessidade de se buscar uma solução mais adequada para esta estimativa. Não havia disponibilidade de dados reais com manobras para a realização de testes. No entanto, um artifício matemático foi utilizado para simular manobras nos poucos dados reais, de trajetórias retilíneas, disponíveis. O artifício foi realizar uma rotação em parte dos dados, em relação a um ponto arbitrário da trajetória. Nesses testes, com dados reais e simulação de manobra, o modelo combinado permaneceu desempenhando as suas estimativas com as mesmas características constatadas nas simulações. 5. CONCLUSÃO Este trabalho foi pautado na comparação de desempenho entre dois modelos de filtro de acompanhamento de alvos adquiridos por radar. O primeiro, o modelo convencional, atualmente utilizado em vários navios da Marinha do Brasil, é aqui tomado como referência. Possui modelagem matemática baseada em um filtro de Kalman estendido, responsável pela estimação de posição e velocidade do alvo em acompanhamento. Nesse modelo, o engajamento do alvo em uma manobra é detectado por um teste estatístico que identifica um distanciamento entre as estimativas realizadas pelo filtro e as medidas recebidas do radar. Como resultado, o filtro passa a corrigir as suas estimativas por meio de reinicializações nas suas estimações. Em síntese, esse modelo não reconhece a mudança na dinâmica do alvo, mas sim a mudança na qualidade da sua estimação. O segundo modelo, o combinado, apresentado neste trabalho como alternativa ao anterior, possui como principal característica a capacidade de alternar dois modelos dinâmicos, um para alvos em MRU e outro para alvos engajados 54 em uma manobra, caracterizando a existência de aceleração na sua dinâmica. Esta abordagem considera a manobra como parte integrante da dinâmica do alvo, embora nem sempre presente. Para essa modelagem, o vetor de estados possui componentes referentes à estimação de posição e velocidade, quando o alvo não está manobrando e passa a ter componentes adicionais referentes à estimação da aceleração quando o alvo passa executar uma manobra. Um teste estatístico de mesma natureza do usado no modelo convencional é usado aqui para a detecção de manobra. Adicionalmente, outro teste estatístico é realizado durante o período de manobra a fim de determinarse o fim desta. Nas diversas simulações realizadas, foi constatado um melhor desempenho do modelo combinado em relação ao modelo convencional no que diz respeito, principalmente, à estimação de posição. A estimação de velocidade sofre maiores oscilações de valor do que o modelo convencional e deve ser filtrada antes de ser apresentada ao operador do sistema. Pelo exposto até aqui, é possível afirmar que a adoção do modelo combinado em substituição ao modelo convencional constitui um passo na direção do aprimoramento tecnológico deste REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 49-55 SENSORES, GUERRA ELETRÔNICA E GUERRA ACÚSTICA tipo de sistema. A limitação encontrada até agora para fortalecer definitivamente essa afirmação é a falta de massa de dados reais que caracterize completamente o problema em estudo. É importante ressaltar que várias técnicas e modelagens sobre o problema de acompanhamento de alvos vêm sendo desenvolvidas há vários anos [5, 9, 10, 11, 13]. Modernamente uma das técnicas mais utilizadas é a do IMM (interacting multiple model) [13], que obtém a estimação do vetor de estados do sistema por meio da combinação de múltiplos módulos de filtros de estimação, cada um ajustado para um modelo dinâmico específico. Este trabalho buscou investigar uma destas abordagens, o filtro de dimensão variável, levando-o para o campo de aplicação, com a finalidade específica de contribuir na evolução de um sistema real atualmente em uso pela Marinha do Brasil. REFERÊNCIAS [1] TABOADA, S. G. Publicação privada da Marinha do Brasil. [2] BAR-SHALOM, Yaakov, BIRMIWAL, K. Variable Dimension Filter for Maneuvering Target tracking. IEEE Trans. on Aerospace and Electronic Systems, Vol. AES-18, NO.5, pp. 621-628, 1982. [3] KALMAN, R. E. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME (J. Basic Eng.), Vol. 82D, pp. 34-45, 1960. [4] WELCH, Greg., BISHOP, Gary., (2004). An Introduction to the Kalman Filter. http://www.cs.unc.edu/~welch/media/pdf/ kalman_intro.pdf. Acesso em: 16 fev. 2005. [5] BAR-SHALOM, Yaakov, RONG LI, Xiao. Estimation and Tracking: Principles, Techniques, and Software. 1ª ed., Norwood, Artech House, Inc., 1998. [6] OLIVEIRA, J. R. P. Acompanhamento de Alvos-Radar Utilizando Filtragem de Kalman e Vetor de Estados com Dimensão Variável. Dissertação de Mestrado COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2005. [7] KAY, Steven M. Fundamentals of Statistical Signal Processing: Estimation Theory. 1ª ed., New Jersey, Prentice-Hall, 1993. [8] PAPOULIS, Athanasios. Probability, Random Variables, and Stochastic Processes. 3ª ed., Singapura, McGraw Hill, 1981. [9] RONG LI, X., JILKOV, P. Vesselin. A Survey of Maneuvering Target Tracking – Part IV: Decision Based Methods. In: Proceedings of SPIE Conference on Signal and Data Processing of Small Targets, 4728-60, Orlando, FL, USA, abr. 2002. [10] BLACKMAN, Samuel S. Multiple-Target Tracking with Radar Applications. 1ª ed., Dedham, Artech House, Inc., 1986. [11] BAR-SHALOM, Yaakov, RONG LI, Xiao, KIRUBARAJAN, Thiagalingam. Estimation with Applications to Tracking and Navigation. 1ª ed., Wiley-Intercience, 2001. [12] BAR-SHALOM, Yaakov, RONG LI, Xiao. MultitargetMultisensor Tracking: Principles and Techniques. 1ª ed., YBS Publishing, 1995. [13] BLACKMAN, Samuel S.,POPOLI, Robert. Design and Analysis of Modern Tracking Systems. 1ª ed., London, Artech House, 1999. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 49-55 55 SENSORES, GUERRA ELETRÔNICA E GUERRA ACÚSTICA Filtros Optoeletrônicos de Microondas não-Recursivos para Aplicações em Radar e em Guerra Eletrônica Capitão-de-Corveta (EN) Carla de Sousa Martins Instituto de Pesquisas da Marinha – IPqM E-mail: [email protected] Capitão Olympio Lucchini Coutinho, M.Sc Instituto Tecnológico de Aeronáutica – ITA E-mail: [email protected] William dos Santos Fegadolli, M.Sc Instituto Tecnológico de Aeronáutica – ITA E-mail: [email protected] Prof. José Edimar Barbosa Oliveira, Ph.D Instituto Tecnológico de Aeronáutica – ITA E-mail: [email protected] Resumo Neste estudo, são apresentadas duas arquiteturas de filtros optoeletrônicos na faixa de microondas, que utilizam dispositivos dispersivos como unidades de atraso dependentes do comprimento de onda. Os filtros são modelados como sistemas ópticos de microondas de três estágios, a saber: uma unidade de entrada consistindo de um modulador eletroóptico, um bloco de processamento totalmente óptico e, finalmente, um módulo de conversão óptico-elétrico. Ambas as arquiteturas exibem características de sintonização e reconfigurabilidade que as tornam de especial interesse para áreas de radar e de guerra eletrônica. A análise teórica dos filtros bem como os resultados obtidos por meio de simulações numéricas são, também, aqui, apresentados. Palavras-chave Filtro Optoeletrônico de Microondas. Processamento Óptico de Sinais. Processamento Óptico de Microondas. Radar. Guerra Eletrônica. Non-Recursive Optoeletronic Microwave Photonic Filters for Radar and Electronic Warfare Applications Abstract This study presents two optoeletronic filter architectures in the range of microwave devices which use dispersive delay units as dependent on wavelength . Filters are modeled as three-stage microwave photonic systems, namely: an input unit consisting of an electrooptic modulator, an all-optical processing block, and finally an optical-electrical conversion module. Both architectures exhibit tuning and reconfiguring characteristics which are of special interest for radar and electronic warfare applications. Theoretical analysis of the filters as well as numerical simulations results are also presented herein. Keywords Microwave Photonic Filter. Optical Signal Processing. Microwave Optical Processing. Radar. Electronic Warfare. 56 1. INTRODUÇÃO Processamento óptico de sinais de radiofrequência (RF) e microondas constitui um tópico que, nos últimos anos, tem despertado grande interesse nas áreas de radar e de guerra eletrônica. Isto se deve não apenas às vantagens amplamente conhecidas dos sistemas ópticos, tais como baixa sensibilidade a interferências eletromagnéticas (EMI), capacidade de banda larga, baixas perdas, tamanho e peso reduzidos, mas também pelos avanços tecnológicos obtidos no projeto e na fabricação de moduladores optoeletrônicos, na de fibras ópticas, bem como de outros componentes ópticos [1]. Graças a esses avanços, o processamento óptico de sinais analógicos tornou-se realidade notável, com índices de desempenho cada vez melhores. Vários grupos de pesquisa têm demonstrado a aplicação de processamento óptico de sinais em links ópticos de RF à fibra óptica (radio-over-fiber), controle de antenas remotas, apontamento de feixe em antenas phased array, etc [4,6,9]. Além disso, as vantagens anteriormente mencionadas têm atraído também a atenção de indústrias na área da Defesa, a tal ponto que estas têm financiado pesquisas visando à aplicação de tecnologia fotônica ma transmissão de sinais de RF em sistemas radar [4]. Este artigo apresenta a modelagem de duas arquiteturas de filtros optoeletrônicos de microondas transversais, baseadas na utilização de dispositivos dispersivos como linhas de retardo dependentes do comprimento de onda. Ambas demonstram elevado potencial para realização de respostas em frequência arbitrárias, ressalvadas algumas limitações que serão expostas no decorrer do presente trabalho, graças à variação dos coeficientes do filtro e de suas unidades de retardo (ou período), tornando-as assim próprias para a aplicação em sistemas radar e de guerra eletrônica. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 56-65 SENSORES, GUERRA ELETRÔNICA E GUERRA ACÚSTICA 2. CONCEITOS FUNDAMENTAIS DE FILTROS OPTOELETRÔNICOS DE MICROONDAS Um filtro optoeletrônico de microondas pode ser visto como um caso particular de processador óptico de sinais que desempenha a filtragem de sinais ópticos modulados por um sinal de microondas. Considerando, a princípio, que as estruturas de processamento óptico são sistemas discretos lineares e invariantes no tempo [3,6], a resposta impulsiva de um filtro pode ser expressa por , (1) onde N é a ordem do filtro, representa a amplitude complexa da resposta ao impulso no tempo t = nT (também chamado de coeficiente do filtro), δ (·) representa a função delta de Dirac (ou impulso) e T é a unidade básica de atraso entre derivações adjacentes. De acordo com o número de amostras da resposta ao impulso N, o filtro pode ser classificado como não-recursivo ou de resposta ao impulso finita (FIR), se N < ∞, ou como recursivo ou de resposta ao impulso infinita (IIR), se N → ∞. Para filtros não-recursivos e amplitudes reais de , os coeficientes do filtro são dados diretamente pelas amplitudes da resposta ao impulso. Como pode ser visto na Figura 1, um sinal de é modulado pela RF de entrada hipotético portadora óptica no modulador eletroóptico e em seguida passa por um circuito fotônico que amostra o sinal no domínio do tempo, atribui pesos às amostras, combina-as usando linhas de retardo ópticas e outros elementos, e, após isto, o sinal passa por um fotodetector e, finalmente, o sinal de RF recuperado e filtrado é obtido. Estritamente falando, a linearidade do filtro somente é garantida no domínio óptico, devido à linearidade das equações de Maxwell, por causa das não-linearidades envolvidas nos processos FIGURA1 Diagrama de fluxo de sinais de um filtro incoerente de ordem N com uma única fonte laser [3]. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 56-65 57 CARLA DE SOUSA MARTINS, OLYMPIO LUCCHINI COUTINHO, WILLIAM DOS SANTOS FEGADOLLI, JOSÉ EDIMAR B. OLIVEIRA de modulação e fotodetecção. Mas sob certas condições, uma relação linear entre os sinais de RF de entrada e saída pode ser escrita como . (2) A largura de banda de 3-dB, também conhecida por FWHM (Full Width Half Maximum), é denotada por . Assim, para filtro passa-banda, a seletividade do filtro é dada pelo seu fator de qualidade ou fator Q. Aplicando a transformada de Fourier em (1), a resposta em frequência elétrica é obtida. (3) A partir de (3) pode-se observar que a resposta em frequência do filtro é periódica com período (em unidades de frequência angular) ou (em unidades de frequência), esta última correspondendo à faixa espectral livre FSR (Free Spectral Range), conforme mostra a Figura 2. (4) (5) Outro parâmetro importante é a razão entre a potência do lóbulo principal e o lóbulo secundário, MSSR (Main to Secondary Sidelobe Ratio), que mede a rejeição do filtro com relação aos canais adjacentes. Além disso, outras características devem ser consideradas a fim de escolher a arquitetura de filtro apropriada para uma aplicação específica. Por exemplo, dependendo do número de fontes ópticas e do arranjo dessas fontes, alguns filtros operarão em regime coerente ou incoerente e poderão ser, ou não, sintonizáveis e reconfiguráveis. FIGURA 2 Espectro periódico típico de um filtro fotônico de microondas [3]. 58 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 56-65 SENSORES, GUERRA ELETRÔNICA E GUERRA ACÚSTICA 3. TEORIA E MODELAGEM DOS FILTROS As duas arquiteturas de filtros optoeletrônicos de microondas, abordadas neste artigo, são modeladas como sistemas ópticos de três estágios, a saber: uma unidade de entrada consistindo de um modulador eletroóptico, um bloco de processamento totalmente óptico e, finalmente, um módulo de conversão do domínio óptico para o domínio elétrico. O módulo de processamento totalmente óptico é realizado por meio de um dispositivo dispersivo, que pode ser um trecho de fibra óptica dispersiva ou um conjunto de grades de Bragg a fibra óptica (FBG), combinado a moduladores eletroópticos e fotodetectores, desempenhando, assim, a função de uma unidade de retardo dependente do comprimento de onda. Nesta seção do artigo, apresentamos a teoria por trás dessas arquiteturas de filtros optoeletrônicos de microondas não-recursivos, que foram recentemente propostas por vários autores [8,10]. 3.1. Filtro Baseado em Modulador de Fase A estrutura deste filtro consiste de N fontes laser, um modulador eletroóptico de fase (PM), um dispositivo dispersivo e um fotodetector (PD) [10]. O diagrama em blocos deste filtro é mostrado na Figura 3, onde as fontes laser CW são combinadas e então acopladas ao PM, que é alimentado por um sinal de RF senoidal, de frequência única. O sinal óptico modulado em fase é então aplicado ao dispositivo dispersivo e a saída deste é detectada pelo PD. O período de amostragem T é determinado pela característica intrínseca do dispositivo dispersivo, que desempenha o papel de uma unidade de retardo dependente do comprimento de onda, conforme será visto mais adiante. Inicialmente, consideremos apenas uma única fonte laser. A amplitude normalizada do campo pode ser expressa óptico modulado em fase por , (6) onde ωc é a frequência angular da portadora, ωm é a frequência angular do sinal de RF modulante, V é a amplitude do sinal modulante, ∆φ(t) é a mudança de fase da portadora e é o índice de modulação de fase. FIGURA 3 Diagrama em blocos do filtro com modulação de fase e detecção de intensidade. LD: Diodo laser; PC: controlador de polarização; PM: modulador de fase; PD: fotodetector. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 56-65 59 CARLA DE SOUSA MARTINS, OLYMPIO LUCCHINI COUTINHO, WILLIAM DOS SANTOS FEGADOLLI, JOSÉ EDIMAR B. OLIVEIRA Expandindo (6) em funções de Bessel de primeiro tipo, sob condições de baixo sinal (mpV<<1), apenas o primeiro harmônico superior e inferior podem ser considerados e os harmônicos de ordem superior podem ser desprezados. Assim, o processo de modulação de fase pode ser considerado como um processo de modulação linear. Com estas simplificações, pode-se reescrever (6) como , (7) denota a função de Bessel de primeiro onde tipo de ordem n. A partir de (7) nota-se que as duas bandas laterais estão defasadas entre si de π rad e se este sinal for diretamente detectado por um fotodetector de lei quadrática, não será possível recuperar o sinal de RF pois o batimento entre a portadora e a banda lateral superior cancela exatamente o batimento entre a portadora e a banda lateral inferior. Entretanto, quando o sinal óptico modulado em fase passa por um dispositivo dispersivo, sua dispersão cromática inerente induz atrasos de fase adicionais a cada componente espectral e o campo óptico pode ser expresso por , 8) onde φ 0, φ 1 e φ 2 são os desvios de fase das componentes espectrais ω c, ω c+ω m e ω c–ω m, respectivamente. Uma vez que os desvios de fase são diferentes para cada uma das três componentes espectrais, estas passarão a estar parcial ou completamente em fase, e o sinal de RF modulante pode ser recuperado quando este sinal óptico for aplicado ao fotodetector. Após expandir a constante de propagação β(ω) em série de Taylor [5,9] e lembrando que a 60 corrente gerada pelo fotodetector é proporcional ao quadrado do campo óptico, pode-se tomar o sinal de RF centrado na frequência ωm (ignorando corrente dc e harmônicos de ordem superior) e obter uma expressão para o sinal de RF recuperado. Considere agora um arranjo de N fontes laser sintonizáveis e descorrelacionadas. Os comprimentos de onda centrais de cada uma das e as potências de saída fontes são são . Pode-se demonstrar que com um espaçamento de comprimento de onda ( ) pequeno e idêntico entre quaisquer fontes laser adjacentes obtém-se a seguinte resposta em frequência , (9) onde: c é a velocidade de propagação da onda óptica no espaço livre; e denotam a dispersão acumulada média e o valor médio de comprimento de onda das portadoras ópticas, respectivamente; f m é a frequência do sinal modulante; é a unidade básica de atraso entre duas derivações adjacentes; H1(Ω) representa a resposta em frequência induzida pela dispersão e, uma vez que todos os coeficientes são positivos, H2(Ω) pode ser facilmente identificado como um típico filtro passa-baixas não-recursivo. A resposta em frequência desse processo de modulação de fase banda estreita com detecção de intensidade é mostrada na Figura 4. Observa-se, a partir de (9), que a resposta em frequência induzida pela dispersão H1(Ω) apresenta o primeiro nulo em dc, o primeiro pico e o e π, segundo nulo quando respectivamente. Esta curva é mostrada na Figura 4a. O segundo termo de (9), H2(Ω), responde por um filtro passa-baixas, cuja resposta em frequência típica é mostrada na Figura 4b. A resposta em frequência efetiva do filtro é mostrada na Figura 4c, que pode ser vista como uma resposta de um filtro passa-baixas convencional H2(Ω), com FSR de 1/T, sendo modificada em sua forma pela REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 56-65 SENSORES, GUERRA ELETRÔNICA E GUERRA ACÚSTICA FIGURA 4 (a) Resposta em frequência induzida pela dispersão H1(Ω); (b) Resposta típica de um filtro passa-baixas não-recursivo H2(Ω); (c) Resposta em frequência do filtro resultante H(Ω). resposta em frequência induzida pela dispersão H1(Ω), assim eliminando a ressonância em dc de um típico filtro passa-baixas. A melhor sintonia do filtro é alcançada quando o primeiro pico de H1(Ω) coincide com o segundo pico de H2(Ω). 3.2. Filtro Baseado em Modulador de Polarização A estrutura deste filtro baseado em Modulador de Polarização [8] é mostrada, a seguir, na Figura 5. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 56-65 O modulador eletroóptico de polarização (PolM) funciona como um dispositivo de retardo de onda controlado eletronicamente, podendo modificar um sinal óptico de entrada linearmente polarizado para um sinal óptico de saída, também linearmente polarizado, mas ortogonal ao sinal de entrada [2]. Quando um sinal de RF é aplicado à porta de RF do PolM, graças ao efeito eletroóptico são gerados dois modos de propagação, ortogonais entre si, que experimentam desvios de fase diferentes, produzindo uma mudança do estado 61 CARLA DE SOUSA MARTINS, OLYMPIO LUCCHINI COUTINHO, WILLIAM DOS SANTOS FEGADOLLI, JOSÉ EDIMAR B. OLIVEIRA FIGURA 5 Diagrama em blocos do filtro com modulação de polarização e detecção de intensidade. LD: Diodo laser; PC: controlador de polarização; PolM: modulador de polarização; PD: fotodetector. de polarização da onda óptica. Considerando uma onda óptica incidente linearmente polarizada, o estado de polarização da onda óptica de saída poderá ser linear e idêntico ao da onda incidente (quando a tensão aplicada é igual a zero) ou linear e ortogonal ao da onda incidente (quando a tensão aplicada é igual a Vπ ), passando pelos estados de polarização elíptica e circular. Nesta arquitetura de filtro, as portadoras ópticas podem ser ajustadas independentemente tanto em potência como em direção de polarização. Ajustando suas direções de polarização a 45° ou a 135°, em relação a um dos eixos principais do modulador, um sinal de RF modulado invertido ou não invertido é obtido, ou, equivalentemente, coeficientes negativos ou positivos do filtro são obtidos. O polarizador colocado após o PolM tem seu eixo de transmissão alinhado a 45° em relação ao mesmo eixo principal do PolM. Quando isto ocorre, a modulação de polarização é convertida em modulação de intensidade. O dispositivo dispersivo desempenha, também, o papel de unidade de retardo dependente do comprimento 62 de onda, de forma semelhante à arquitetura apresentada anteriormente. Considera-se que as N fontes laser sintonizáveis são descorrelacionadas entre si e que possuem e comprimentos de onda centrais potências de saída . Considerando uma fibra óptica como dispositivo dispersivo, a unidade básica de atraso T entre duas derivações adjacentes é dada por , onde é a dispersão acumulada média da fibra (ps/nm) e é o espaçamento de comprimento de onda idêntico entre quaisquer fontes laser adjacentes. A resposta ao impulso para um filtro de microondas de ordem N é dada por , (10) onde Pk é a potência de saída da k-ésima portadora óptica e é determinado pelo estado de polarização da k-ésima portadora óptica. Se esta for alinhada a um ângulo de 45° em relação a um dos eixos principais do PolM, o sinal óptico REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 56-65 SENSORES, GUERRA ELETRÔNICA E GUERRA ACÚSTICA modulado na saída do polarizador é invertido se comparado ao sinal de RF modulante e, dessa forma, ; se, ao contrário, a portadora óptica for alinhada a 135o em relação ao mesmo . eixo principal do PolM, tem-se Aplicando a transformada de Fourier em ambos os lados de (10), obtém-se a correspondente resposta em frequência . (11) Assim, ajustando as potências das portadoras ópticas bem como suas direções de polarização, pode-se ajustar de forma independente a magnitude e o sinal dos coeficientes do filtro. 4. RESULTADOS DE SIMULAÇÕES NUMÉRICAS As simulações foram realizadas utilizando o software Matlab®, tendo sido estipulado um filtro de quarta ordem (N = 4), com FSR = 12.5 GHz. A primeira arquitetura simulada refere-se ao filtro optoeletrônico de microondas baseado em modulador de fase. Uma atenção especial que resultará em deve ser dada à escolha de um determinado valor de , pois a posição do primeiro pico de H1(Ω) depende destes dois parâmetros. Deve-se ressaltar que a melhor sintonia do filtro é obtida quando o primeiro pico de H1(Ω) e o segundo pico de H2(Ω) coincidem. Além disso, o segundo pico de H2(Ω) é determinado pelo valor da unidade básica de atraso T que depende de e . com FSR de 12.5 GHz, o valor de conveniente é 1540 nm, produzindo, de acordo com (12), uma dispersão acumulada de aproximadamente 408.1 ps/nm. O espaçamento necessário para produzir a FSR desejada é de 0,196 nm, resultando em uma unidade de atraso T de 80 ps. Com estes parâmetros, o primeiro pico de H1(Ω) e o segundo pico de H2(Ω) coincidem. A fim de aumentar a MSSR do filtro, uma janela de Kaiser é aplicada, sendo esta projetada para uma atenuação mínima de 30 dB [7]. Os coeficientes da janela são {0.44, 1, 1, 0.44}. A MSSR e a largura de banda de 3-dB obtidas com janela retangular são, respectivamente, 12.17 dB e 2.84 GHz, enquanto que com a janela de Kaiser são 30.76 dB e 3.02 GHz, respectivamente, mostrando uma atenuação adicional de 18.59 dB e um ligeiro aumento da largura de banda de 3-dB. A resposta em frequência para estas simulações são, a seguir, apresentadas na Figura 6. Pode-se mostrar que a resposta em fase dentro da banda passante deste filtro não é linear. Entretanto, o atraso de grupo dentro da banda passante é linear. FIGURA 6 Resposta em frequência normalizada para um filtro de quarta ordem baseado em modulador de fase. Linha ponto-tracejada: H2(Ω) obtido com janela retangular {1, 1, 1, 1}; linha pontilhada: H2(Ω) obtido com janela de Kaiser {0.44, 1, 1, 0.44}; linha tracejada: H1(Ω); e linha sólida: H(Ω) obtido a partir da janela de Kaiser. O dispositivo dispersivo foi simulado como um trecho de 25 km de fibra óptica monomodal SMF28, cujo padrão de dispersão é dado por [6] , (12) é o coeficiente de onde dispersão nula e λ0 é o comprimento de onda de dispersão nula. Para um filtro de quarta ordem REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 56-65 63 CARLA DE SOUSA MARTINS, OLYMPIO LUCCHINI COUTINHO, WILLIAM DOS SANTOS FEGADOLLI, JOSÉ EDIMAR B. OLIVEIRA A segunda simulação refere-se à arquitetura de filtro optoeletrônico de microondas baseado em modulador de polarização. O dispositivo dispersivo considerado é novamente simulado como um trecho de 25 km de fibra óptica monomodal SMF-28. Para um filtro de quarta ordem com foi escolhido FSR de 12.5 GHz, o valor de como 1540 nm, a fim de manter o mesmo valor da simulação anterior, com dispersão acumulada de aproximadamente 408.1 ps/nm. O espaçamento necessário para produzir a FSR desejada é de 0,196 nm, resultando em uma unidade de atraso T de 80 ps. A mesma janela de Kaiser {0.44, 1, 1, 0.44} foi aplicada. A MSSR e a largura de banda de 3-dB obtidas com janela retangular são, respectivamente, 11.30 dB e 2.84 GHz, enquanto que com a janela de Kaiser são 28.82 dB e 3.10 GHz, respectivamente, mostrando uma atenuação adicional de 17.52 dB e um ligeiro aumento da largura de banda. As respostas em frequência para estas simulações são apresentadas na Figura 7. Pode-se mostrar que a resposta em fase dentro da banda passante deste filtro é linear. 5. DISCUSSÕES Baseado nos resultados obtidos com as simulações feitas para um filtro optoeletrônico de microondas de quarta ordem, com FSR de 12.5 GHz, observa-se que o uso de várias fontes ópticas possibilita obter larguras de banda tão estreitas quanto o desejado, para isso, bastando aumentar o número de fontes ópticas que está diretamente relacionada à ordem do filtro. Além disso, as potências de saída das fontes podem ser ajustadas independentemente, possibilitando assim o uso da técnica de janelamento a fim de aumentar a MSSR do filtro, ao preço de um ligeiro aumento da largura de banda de 3-dB. Uma grande vantagem do uso de várias fontes ópticas é que, por serem fontes independentes, estas também são descorrelacionadas entre si e, desta forma, diz-se que os filtros operam em regime incoerente, o que garante a existência de uma relação linear entre a corrente detectada pelo fotodetector, que corresponde ao sinal de RF recuperado, com o sinal de RF modulante. Além disso, o processamento paralelo obtido com as múltiplas fontes faz com que o tempo de resposta FIGURA 7 Resposta em frequência normalizada para um filtro de quarta ordem baseado em modulador de polarização. (a) Linha sólida: filtro passa-baixas com coeficientes {1, 1, 1, 1}; linha tracejada: filtro passa-banda com coeficientes {1, -1, 1, -1}. (b) Aplicação de janela de Kaiser {0.44, 1, 1, 0.44}. 64 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 56-65 SENSORES, GUERRA ELETRÔNICA E GUERRA ACÚSTICA dos filtros seja reduzido. Este tempo pode ser ainda menor diminuindo-se o tempo de propagação do sinal óptico na fibra óptica, mediante o uso de fibras ópticas mais dispersivas do que as monomodais simuladas neste trabalho, ou ainda com o uso de grades de Bragg a fibra óptica. Em relação à resposta de fase dos filtros, a arquitetura baseada em modulação de polarização possui resposta linear. Já a arquitetura baseada em modulação de fase não possui resposta linear, muito embora o atraso de grupo seja linear o que, dependendo da aplicação, pode se tornar um aspecto restritivo. Quanto à reconfigurabilidade, que se refere à capacidade que tem o filtro de modificar a forma de sua resposta em frequência, conclui-se que as duas arquiteturas de filtros optoeletrônicos apresentadas neste artigo são reconfiguráveis. A arquitetura de filtro que utiliza modulador de polarização possui liberdade adicional de produzir coeficientes negativos, podendo, dessa forma, variar desde uma configuração passa-baixas a uma configuração passa-banda. A sintonização do filtro refere-se à capacidade de modificar sua FSR. Em ambas as arquiteturas, este parâmetro depende da dispersão total acumulada e do espaçamento entre os comprimentos de onda das fontes ópticas (Δλ). A arquitetura baseada em modulador de fase, cuja ressonância em dc foi eliminada pelo efeito da dispersão, correspondendo, por isso, a um filtro passa-banda, possui capacidade de sintonia limitada. Isto se deve ao fato de que, para modificar a FSR, deve-se ajustar o espaçamento Δλ, visto que a dispersão acumulada não é um parâmetro de ajuste livre, mas sim, dependente da característica de dispersão intrínseca da fibra. Uma vez modificado Δλ, modifica-se a FSR, mas o pico da resposta em frequência induzida pela dispersão se mantém praticamente inalterado, distorcendo a forma da resposta em frequência do filtro. Já a arquitetura de filtro que utiliza modulador de polarização é completamente sintonizável. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 56-65 6. CONCLUSÕES Neste trabalho, foram simuladas numericamente duas arquiteturas de filtros optoeletrônicos de microondas que mostraram ser sintonizáveis e reconfiguráveis, tornando-se apropriados para o uso em sistemas dinâmicos tais como radar e de guerra eletrônica, sem mencionar as vantagens inerentes de sistemas ópticos já mencionadas anteriormente, as quais inclui tempo de processamento reduzido, característica essencial a sistemas que operam em tempo real. Os resultados obtidos com as simulações estão perfeitamente coerentes com aqueles publicados por diversos pesquisadores. REFERÊNCIAS [1] ACKERMAN, E. e COX, C. H.. RF Fiber-Optic Link Performance. IEEE Microwave Magazine, pp.50-58, Dezembro 2001. [2] BULL, J. D.; JAEGER, N. A. F.; KATO, H.; FAIRBURN M.; REID, A. e GHANIPOUR, G.. 40 GHz electro-optic polarization modulator for fiber optic communications systems. Proceedings SPIE, vol.5577, no.1, pp. 133-143, Setembro 2004. [3] CAPMANY, J.; ORTEGA, B.; PASTOR, D. e SALES, S.. A tutorial on microwave photonic filters. Journal of Lightwave Technology, vol.24, no.1, pp. 201-229, Janeiro 2006. [4] GARENAUX, K.; MERLET, T.; FOURDIN, C. e CHAZELAS, J.. Recent Breakthroughs in Photonics for Radar Systems. IEEE A&E Systems Magazine, pp. 3-8, Fevereiro 2007. [5] MESLENER, G. J.. Chromatic dispersion induced distortion of modulated monochromatic light employing direct detection. IEEE Journal of Quantum Electronics, vol.qe-20, no. 10, pp. 12081216, Outubro 1984. [6] MINASIAN, R. A.. Photonic signal processing of microwave signals. IEEE Transactions on Microwave Theory and Techniques, vol.54, no.2, pp. 832-846, Fevereiro 2006. [7] OPPENHEIM, A. V. e SCHAFER, R. W.. Discrete-time signal processing. Englewood Cliffs, NJ: Prentice-Hall, 1989. [8] WANG, Q. e YAO, J.. Multitap photonic microwave filters with arbitrary positive and negative coefficients using a polarization modulator and an optical polarizer. IEEE Photonics Technology Letters, vol.20, no.2, pp. 78-80, Janeiro 2008. [9] YAO, J.; ZENG, F. e WANG, Q.. Photonic generation of ultrawideband signals. Journal of Lightwave Technology, vol.25, no.11, pp. 3219-3235, Novembro 2007. [10] ZENG, F. e YAO, J.. Investigation of phase-modulatorbased all-optical bandpass microwave filter. Journal of Lightwave Technology, vol.23, no.4, pp. 1721-1728, Abril 2005. 65 CIBERNÉTICA (TECNOLOGIA DA INFORMAÇÃO) E COMUNICAÇÕES Sistemas de Telecomunicações Mc Ds Cdma com Estimação Cega de Canal baseada no Método de Subespaço e na Técnica de Potência Deolinda Fontes Cardoso Doutora em Engenharia Elétrica - PUC - Rio Centro de Análises de Sistemas Navais - CASNAV - MB Praça Barão de Ladário s/ nº, Ilha das Cobras, Edifício, 3º andar - Centro E-mail: [email protected] Fabian David Backx Doutor em Engenharia Elétrica - PUC - Rio Centro de Estudos em Telecomunicações da PUC-Rio - CETUC Rua Marques de São Vicente nº 225 - Gávea E-mail: [email protected] Raimundo Sampaio Neto PhD em Engenharia Elétrica - Professor Orientador - PUC - Rio Centro de Estudos em Telecomunicações da PUC-Rio - CETUC Rua Marques de São Vicente nº 225 - Gávea E-mail: [email protected] Resumo Neste trabalho, investigamos a aplicação do método de decomposição por valor singular e da técnica de potência para identificar a informação do estado do canal de transmissão (Channel State Information - CSI) em redes de comunicações sem fio baseadas no sistema MC DS CDMA (Multi Carrier Direct Sequence Code Division Multiple Access).A abordagem permite obter estimativas eficientes do subespaço do ruído por meio da matriz autocorrelação, do sinal de dados recebidos, elevada a uma potência finita e, assim, a estimativa da CSI é, diretamente, obtida por decomposição por valor singular (SVD) com dimensões da ordem do canal. Análises de desempenho de Erro Médio Quadrático e Taxa de Erro de Bits demonstraram que o método proposto apresenta desempenho comparável às técnicas existentes de SVD, porém, com menor magnitude computacional. Palavras-chave Decomposição por Valor Singular. Método das Potências. Estimação Cega de Canal. Sistemas de Comunicação sem Fio. Mc Ds Cdma Telecommunication Systems with Blind Channel Estimation based on Subspace Method and Technique of Power Abstract This work investigates the application of the singular value decomposition method and the power to identify the status information channel (Channel State Inforamtion-CSI) networks for wireless communication systems based on Multi Carrier Direct Sequence Code Division Multiple Access (MC DS CDMA ZP). The approach allows obtaining efficient estimates of the noise subspace by means of the autocorrelation matrix of received data signal, and this the estimate of the CSI is directly obtained by singular value decomposition (SVD) with channel order dimension. Mean square error rate performance and Bit Error analysis have demonstrated that the proposed method presents a performance comparable to SDV existing techniques, but with less computational magnitude. Keywords Singular Value Decomposition. Power Methods. Blind Channel Estimation. Wireless Communication Systems. 66 1. INTRODUÇÃO O fantástico crescimento das Redes de Área Local sem fio - WLAN (Wireless Local Area Network) e a crescente demanda por altas taxas de transmissão de dados incentivam as pesquisas na busca de sistemas de comunicação com desempenhos cada vez melhores em conjunto com alta eficiência espectral e, principalmente, capazes de suportar os múltiplos usuários ativos do sistema [12]. Dentre os sistemas de transmissão em blocos com múltiplas portadoras e multiusuários, destacamse aqueles que empregam a técnica de acesso ao meio por divisão de código CDMA (Code Division Multiple Access) [9], [6]. Um desses sistemas é o MC DS CDMA (Multi Carrier Direct Sequence CDMA) foco deste estudo, no qual os símbolos de dados são espalhados no tempo e os chips do código de espalhamento são todos transmitidos, em cada uma das múltiplas subportadoras, por meio de um esquema OFDM (Orthogonal Frequence Division Multiplexing) [13]. Esse sistema permite transmissões livres de Interferência Entre Blocos (IEB), por meio da utilização de um intervalo de guarda, e robustez contra os efeitos de desvanecimento do canal. Na estação receptora é realizada a demodulação dos dados recebidos. No caso de detecção coerente faz-se necessário estimar a resposta ao impulso do canal de propagação. Um dos modos de realizar a estimação do canal é por meio do envio de símbolos piloto; outro modo é a estimação cega, na qual, é necessário um conhecimento mínimo a cerca, por exemplo, das estatísticas do sinal transmitido. A estimação cega é abordada neste trabalho propondo, para o sistema MC DS CDMA, um método de estimação que explora a ortogonalidade dos REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 66-74 CIBERNÉTICA (TECNOLOGIA DA INFORMAÇÃO) E COMUNICAÇÕES subespaços do sinal e do ruído em conjunto com técnicas de potência. Estimativas cegas de canal empregando a técnica de potência foram, inicialmente, propostas para CDMA por Tsatsanis [10] e Xu [11]. Todavia, foi somente com a publicação dos trabalhos de Doukopoulos e Moustakides [2, 3] que uma explicação formal justificando o uso desse método foi apresentada, bem como, a explicação matemática do fato de que estimativas obtidas por meio do método de potências são, na verdade, uma aproximação das estimativas obtidas por meio de métodos de subespaço. Ademais, as técnicas de estimação cega baseadas em subespaço apresentam um desempenho bastante próximo das abordagens que minimizam o Erro Médio Quadrático sem a necessidade de sequências de treinamento e por isso foram escolhidas neste trabalho. Dessa for ma, partindo dos trabalhos de Doukopoulos [2, 3] propostos para CDMA e do trabalho de Backx [1] para OFDM o presente estudo estende a metodologia para a estimação cega de canal no sistema MC DS CDMA e avalia o seu desempenho em canais seletivos em frequência. Na metodologia proposta, uma estimativa da informação do estado do canal, de cada usuário ativo do sistema, é obtida por meio de um método padrão de decomposição por valor singular (Singular Value Decomposition), denotada por ‘svd padrão’. Essa estimativa é comparada com outras estimativas obtidas por um procedimento de ‘svd simplificado’, no qual se utilizam operações de produto ponto-a-ponto e uma matriz de potência para aproximar o produto do subespaço do ruído. O desempenho simulado do sistema empregando as estimativas obtidas é avaliado em ambientes de baixa, média e alta razão sinal ruído e as análises de Erro Médio Quadrático e Taxa de Erro de Bit dos estimadores comprovaram que para moderada razão sinal ruído o método ‘svd simplificado’ proposto permite um desempenho comparável aos tradicionais métodos ‘padrão’ de subespaço, porém com menor complexidade computacional. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 66-74 Na Seção 2, deste trabalho, descreve-se o modelo vetorial dos sinais; na Seção 3, apresentam-se as análises de estimação cega, de equalização e detecção dos sinais; na Seção 4, descrevem-se os resultados experimentais e, finalmente, na Seção 5, apresentamos as conclusões do trabalho. Notação adotada: caracteres maiúsculos em negrito denotam matrizes; caracteres minúsculos em negrito denotam vetores. Os operadores (.)T, (.)H e (.)* indicam transposto, hermitiano (transposto conjugado) de um vetor e conjugado de um escalar complexo; ||A||F representa a norma de Frobenius da matriz A e A-1 representa a matriz inversa de A, o operador indica o produto de Hadamard (Ponto-a-Ponto) e diag (v) expressa uma matriz diagonal cujos componentes são os elementos do vetor v. A matriz FP,P implementa a Transformada Direta Discreta de Fourier (DFT) e a matriz FHP,P (matriz Hermitiana) implementa a Transformada Inversa Discreta de Fourier (IDFT), de dimensões P x P, ambas normalizadas de forma que FP,PHFP,P = FP,PFP,PH = IP onde a matriz IP representa a matriz identidade. 2. O MODELO VETORIAL DOS SINAIS São consideradas transmissões síncronas em M subportadoras, no enlace reverso, em uma célula com K usuários ativos. As sequências de espalhamento são códigos curtos de WalshHadamard de comprimento N; os símbolos transmitidos são descorrelacionados com energia unitária e oriundos de constelações BPSK (Binary Phase Shif Keying). No sistema MC DS CDMA inicialmente ocorre a conversão série-paralelo de cada símbolo de informação a ser transmitido, que resulta na formação de blocos de comprimento M. A seguir, os símbolos em cada bloco são multiplicados pela mesma sequência de espalhamento, formada por N chips de espalhamento. Antes da transmissão chip a chip do bloco, é aplicada uma operação de Transformada Inversa Discreta de Fourier de M pontos e, a seguir, um 67 DEOLINDA FONTES CARDOSO, FABIAN DAVID BACKX, RAIMUNDO SAMPAIO NETO intervalo de guarda do tipo ZP (Zero Padding) [7] de comprimento G, no mínimo igual ao comprimento L da resposta ao impulso do equivalente discreto do canal, é adicionado ao final de cada bloco para garantir a eliminação da IEB. Esse bloco OFDM resultante, de dimensão P=M+G é, então, transmitido pelo canal multipercurso cujo equivalente discreto é modelado por uma matriz de convolução Toeplitz P x P triangular inferior na qual a primeira coluna é a resposta ao impulso (do equivalente discreto) do canal hm est estendida com zeros. No receptor, o sinal sofre a adição de ruído gaussiano branco, o intervalo de guarda não é removido e é computada a operação da Transformada Direta Discreta de Fourier. Após o processamento por um banco de filtros casados às sequências de espalhamento dos usuários ativos no sistema, não há mais interferência de múltiplo acesso (IMA) (devido à preservação da ortogonalidade dos códigos empregados) e o vetor de sinal resultante, correspondente ao m-ésimo usuário de interesse, pode ser expresso por: ym (i) = Hm V bm (i) + n (i) (1) onde V = FP,P FP,MH é uma matriz de dimensão P x M, e FP,M é uma matriz P x M contendo as primeiras M colunas da matriz FP,P; n (i) é um vetor de ruído gaussiano branco complexo com média nula e matriz covariância E [n (i) nH (i)] = σ2I, onde σ2 é a potência do ruído. A matriz Hm é diagonal de dimensões P x P onde os elementos da diagonal são as componentes da resposta em frequência do equivalente discreto do canal do m-ésimo usuário: (2) o vetor transposto é a resposta ao impulso no tempo estendida com zeros. Note que a resposta em frequência do canal em (2) pode, também, ser expressa em função da resposta ao impulso no tempo sem a extensão com zeros: 68 (3) onde a matriz FP,L tem dimensões P x L contém as L primeiras colunas da matriz FP,P e o vetor transposto é composto pelos L coeficientes do canal. 3. ESTIMAÇÃO CEGA DE CANAL, EQUALIZAÇÃO E DETECÇÃO A matriz autocorrelação do sinal recebido, dado na equação (12), é expressa por: (4) Empregando o método de decomposição por valor singular (Singular Value Decomposition) [5], tem-se: (5) onde Ss representa uma matriz de dimensões P x M cujas colunas formam uma base ortonormal para o subespaço dos sinais, a matriz Sn representa uma matriz de dimensões P x G cujas colunas formam uma base ortonormal para o subespaço do ruído. A matriz Λs expressa uma matriz diagonal contendo os M valores singulares associados aos M vetores singulares da matriz do subespaço dos sinais, isso sugere que o subespaço dos sinais tem posto M e, sendo o subespaço do ruído o seu complemento ortogonal, a matriz do subespaço do ruído tem posto G. Em decorrência da propriedade de ortogonalidade entre os subespaços é válido aplicar as seguintes igualdades: (6) As igualdades em (6) decorrem do fato de que as de dimensões P x M estão colunas da matriz REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 66-74 CIBERNÉTICA (TECNOLOGIA DA INFORMAÇÃO) E COMUNICAÇÕES contidas no subespaço dos sinais e, portanto, são ortogonais ao subespaço do ruído. Assim, conforme descrito em [1], desenvolvendo o quadrado da norma de Frobenius é possível chegar a seguinte expressão: (7) onde o vetor vj com j = 1,..., M corresponde a j-ésima coluna da matriz V. Uma estimativa do vetor dos coeficientes do pode ser obtida como o vetor singular canal associado ao menor valor singular (que é zero), da matriz de dimensões P x P. Convém frisar que a estimativa resultante é da forma contendo, portanto, uma ambiguidade de fase modelada por um escalar complexo β. Assim, a expressão (7) é simplificada para: (10) 3.1.2. Aproximação em Potência para a Matriz SnSnH (Produto dos Subespaços) Baseado no método das potências, o produto das matrizes SnSnH pode ser aproximado pela inversa da matriz autocorrelação elevada a uma potência finita p. Para isso, utilizamos o seguinte Lema descrito por Doukopoulos [4]. Lema 1 – Seja a matriz autocorrelação Rym decomposta em SVD como em (10). Sejam λ1 ≥ λ2 . . . λM ≥ 0 os valores singulares e elementos componentes da diagonal da matriz Λs; assim podemos escrever: 3.1. A Ideia Chave Conforme visto, para obter uma estimativa da resposta em frequência do canal é preciso determinar o vetor singular associado ao menor valor singular da matriz de dimensões P x P, o que pode ser conseguido aplicando-se, por exemplo, a operação de decomposição por valor singular (SVD). Contudo, a seguir são explorados alguns fatos que permitem amenizar a complexidade computacional do procedimento, bem como melhorar a qualidade da estimativa. (11) A partir da expressão acima é possível observar depende da potência que a matriz p, desde que é uma matriz diagonal com elemenpara j=1,...,M pode ser tos da forma deduzido que: (12) 3.1.1. Aplicação de Produto Ponto-a-Ponto Na expressão a complexidade do cálculo do somatório pode ser diminuída substituindo-o por uma operação mais simples por meio da utilização do produto de Hadamard (ponto-a-ponto): (8) (9) REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 66-74 Finalmente, combinando as expressões (11) e (12) verificamos a igualdade abaixo, que é uma variação do método das potências: (13) É possível observar que a velocidade da convergência da aproximação, por meio da matriz de potência para obter o produto dos subespaços do ruído, é exponencial. 69 DEOLINDA FONTES CARDOSO, FABIAN DAVID BACKX, RAIMUNDO SAMPAIO NETO Assim, pode ser usada a inversa da matriz autocorrelação (Rym)-p elevada a uma potência p para aproximar, com menor complexidade, o produto entre as matrizes do subespaço do ruído SnSnH. Quando a potencia p tende para o infinito o valor da aproximação converge para o produto das matrizes SnSnH. Neste trabalho, a matriz autocorrelação em (4) é estimada, no i-ésimo intervalo de transmissão de bloco, como uma média temporal dada por: (14) Sob as observações feitas, o vetor da estimativa da resposta em frequência do equivalente discreto do canal pode ser obtido de forma a minimizar a forma quadrática dada por: (15) 3.1.3. Obtenção da estimativa do canal no tempo É possível diminuir a complexidade do estimador dado em (15) e melhorar a sua qualidade. A partir de (3) sabe-se que o vetor da resposta em frequência do canal pertence ao subespaço gerado pelas L primeiras colunas da matriz de Fourier FP,P. Como o valor correto do comprimento L do canal pode não ser conhecido a priori, assume-se o intervalo de guarda G, que é conhecido, como no mínimo igual ao comprimento do canal. Assim, a forma quadrática a ser minimizada em (15) de dimensões P x P pode ser escrita no domínio do tempo na seguinte forma: (16) Na expressão (16) a matriz associada a forma quadrática a ser minimizada possui menores dimensões G x G, onde G << P. Sendo assim, a formulação adotada permite uma abordagem de menor complexidade computacional devido a não ser mais necessário computar o so; matório de vetores e o produto de matrizes especialmente quando este produto é constantemente recalculado para a obtenção de estimativas do subespaço do ruído a cada atualização da estimativa da matriz autocorrelação. O termo do somatório foi substituído por uma simples operação de produto ponto-a-ponto entre um produto de matrizes V, que pode ser pré-computado (V = FP,P FP,MH envolve apenas matrizes de Fourier) e por uma matriz de potência (Rym)-p onde a inversa da matriz autocorrelação Rym-1 pode ser, recursivamente, calculada aplicando o Lema de Inversão de Matrizes. Além disso, a obtenção da estimativa do canal, no domínio do tempo, dada em (16) consiste em determinar o vetor singular associado ao menor valor singular de uma matriz de dimensões da ordem do canal. 3.2. Equalização e Detecção Uma vez realizada a estimação da informação do estado do canal a equalização do sinal dado em (1) para desfazer a distorção do sinal provocada pelo canal, pode ser realizada no domínio da frequência aplicando o equalizador ZF (Zero Forcing): G = (Hm V) [( Hm V)H (Hm V) ] -1 Onde Hm = diag ( ) é a matriz diagonal contendo a estimativa da resposta em frequência do equivalente discreto do canal obtida. Após a equalização, uma estimativa do bloco de dados bm(i) transmitido pelo m-ésimo usuário pode ser obtida bm(i) = sgn {Real [GH ym (i) ] } resultando na estimativa da resposta em frequência do equivalente discreto do canal dada por . 70 (17) (18) Onde sgn (.) representa a função sinal, e o operador sgn{Real[.]} é aplicado a cada componente do vetor GHym (i) de dimensão P x 1. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 66-74 CIBERNÉTICA (TECNOLOGIA DA INFORMAÇÃO) E COMUNICAÇÕES 4. RESULTADOS DE SIMULAÇÃO Nesta seção, estão apresentados os resultados, obtidos por simulação, do desempenho do sistema MC DS CDMA com intervalo de guarda o tipo ZP. Os experimentos objetivam comparar o método de decomposição por valor singular SVD, descrito em [7], com a abordagem descrita neste estudo. O canal de comunicações é modelado por um filtro FIR de ordem 5. O comprimento do intervalo de guarda vale G = 8. Uma vez que o intervalo de guarda é maior que a ordem do canal, fica garantido que não haverá interferência entre blocos (IEB) na recepção. Os ganhos são normalizados de forma que || h ||2 = 1, o vetor dos coeficientes da resposta ao impulso do canal simulado é dado por h = [0.74; -0.42; 0.083; 0.49; -0.12; 0.01] conforme descrito em [8]. A ambiguidade de fase inerente da estimação cega é eliminada adotando a fase do primeiro coeficiente (0,74) do vetor do canal como uma referência e nas simulações usou-se o algoritmo de equalização Zero-Forcing. O estimador SVD trabalha em dois passos: o primeiro consiste em aplicar a operação de SVD na matriz autocorrelação de P x P pontos, a fim de obter a o subespaço do ruído. No segundo passo é aplicada outra operação de SVD na equação (16) para obter a estimativa ao impulso do canal. O cenário considerado consiste de K = 16 usuários ativos no sistema, número de subportadoras igual ao ganho de processamento M = N = 32. Os resultados ilustrados são a média de 100 experimentos independentes e NB = 2500 blocos de símbolos foram considerados para a avaliação das estimativas da resposta ao impulso do canal. Nas Figuras 1 e 2 estão traçadas as curvas de desempenho do erro médio quadrático da estimativa FIGURA 1 Desempenho de Erro Médio Quadrático versus Número de Blocos de Símbolos Transmitidos MC DS CDMA ZP - Eb/N0=15 dB REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 66-74 71 DEOLINDA FONTES CARDOSO, FABIAN DAVID BACKX, RAIMUNDO SAMPAIO NETO FIGURA 2 Desempenho de Erro Médio Quadrático versus Número de Blocos de Símbolos Transmitidos MC DS CDMA ZP - Eb/N0=25 dB de canal do m-ésimo usuário versus o número de blocos de símbolos transmitidos NB. Em cada figura utilizou-se, respectivamente, o valor de 15 decibéis e 25 decibéis para a Razão Sinal Ruído. Na legenda ‘svd’ corresponde a estimativa da resposta ao impulso do canal obtida pelo método padrão de decomposição por valor singular e os termos ‘p=1’, ‘p=2’ e ‘p=3’ representam as potências utilizadas para obter as 3 estimativas empregando o método proposto utilizando a aproximação pelo método das potências e o operador de produto ponto-a-ponto. Em ambientes com alta razão sinal ruído, 25 dB, com pequenos valores da potência p o desempenho de Erro Médio Quadrático das estimativas obtidas pelo método proposto converge para a curva de 72 desempenho da estimativa obtida pelo método de ‘svd’ (padrão); e em tais ambientes a potência p = 2 é suficiente para obter uma aproximação consistente. Na Figura 3, estão ilustradas as curvas de desempenho da Taxa de Erro de Bits versus Razão Sinal Ruído (dB). Pode ser observado, pela distribuição das curvas, que é suficiente considerar a potências p < 3 para obter estimativas de canal por meio do método proposto. Além disso, para razão sinal ruído, da ordem de 18 dB, o estimador com aproximação por potência p = 2 encontra desempenho bastante próximo ao desempenho do estimador ‘svd’ padrão, esse atinge nível de BER de 10-3 em 18 dB e os estimadores com potência p = 2 e p = 3, praticamente, atingem o mesmo patamar em 18.5 dB. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 66-74 CIBERNÉTICA (TECNOLOGIA DA INFORMAÇÃO) E COMUNICAÇÕES FIGURA 3 Desempenho da Taxa de Erro de Bit (BER) versus Razão Sinal Ruído Eb/N0 (dB) - MC DS CDMA ZP 5. CONCLUSÕES Este trabalho investigou o problema de obtenção de estimativas da informação do estado do canal, baseadas em métodos de identificação de subespaço em conjunto com aproximação em potência. A metodologia proposta foi aplicada ao sistema MC DS CDMA ZP empregado em redes de comunicação sem fio e permitiu uma formulação simplificada de menor complexidade computacional, para isso foi utilizado o operador de produto pontoa-ponto e o método das potências para aproximar o subespaço do ruído nas operações de decomposição por valor singular (SVD). REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 66-74 Os resultados de desempenho, em ambientes de moderada razão sinal ruído, mostraram que o método proposto permite obter estimativas de canal com desempenho bastante próximo ao das abordagens de SVD tradicionais, sendo que pequenos valores da potência p (p < 3) são suficientes para obter bons resultados com menor complexidade computacional. Mais ainda, para quaisquer dois valores da potência p quando o número de blocos de símbolos aumenta a maior potência prevalece apresentando melhor convergência. 73 DEOLINDA FONTES CARDOSO, FABIAN DAVID BACKX, RAIMUNDO SAMPAIO NETO 6. AGRADECIMENTO Os autores agradecem ao, então, Contra-Almirante Bernardo José Pierantoni Gambôa, quando Diretor do Centro de Análises de Sistemas Navais – CASNAV–MB, pelo valioso incentivo e parcial financiamento para o desenvolvimento desta pesquisa realizada em conjunto com o Centro de Estudos em Telecomunicações da Pontifícia Universidade Católica do Rio de Janeiro, CETUC / PUC-Rio. REFERÊNCIAS [1] BACKX Fabian David; VINHOZA T. T. V. e SAMPAIO NETO Raimundo, Power Techniques for Blind Adaptive Channel Estimation in in Zero-Padded OFDM Systems. 18th Annual IEEE International Symposium on Personal Indoor and mobile radio Communication PIMRC, 2007. [2] DOUKOPOULOS X. G. e MOUSTAKIDES G. V.. Blind Channel Estimation for Downlink CDMA Systems. Proc. IEEE International Conference on Communications (ICC), 2003. [3] __________________________________________ Power Techniques for Blind Adaptive Channel Estimation in CDMA Systems. Proc. IEEE Global Telecommunications Conference GLOBECOM, 2003. [4] __________________________________________ Blind Channel estimation for DS-CDMA. INRIA Relatório de Pesquisa no. 4781, Março, pp. 1-20, 2003. 74 [5] GOLUB G. H. e VAN LOAN C. F.. Matrix Computation. 2a. edicão. The John Hopkins University Press, 1990. [6] KONDO S. e MILSTEIN L. B.. On the Use of Multicarrier Direct Sequence Spread Spectrum Systems. Proc. IEEE Military Communications Conference, MILCOM, pp. 52-56, Outubro, 1993. [7] MUQUET B.; WANG Z., GIANNAKIS G. B., COURVILLE M. de e DUHAMEL P.. CyclicPrefixing or Zero Padding for Wireless Multicarrier Transmissions? IEEE Transactions on Communications, v. 12, n. 50, p. 2136-2148, 2003. [8] SARI H.; KARAM G. e JEANCLAUDE I.. Transmission Techniques for Digital Terrestrial TV Broadcasting. IEEE Communications Magazine, 0163-6804/95, pp. 100-109, 1995. [9] SILVA V. da e SOUSA E. S.. Performance of Orthogonal CDMA Codes for Quasi-Synchronous Communication Systems. Proc. IEEE International Conference on Universal Personal Communications, ICUPC 93, pp. 995-999, Outubro, 1993. 10] TSATSANIS M. K. e XU Z.. Performance Analysis of Minimum variance CDMA Receivers. IEEE Transactions Vehicular on Signal Processing, vol. 46, pp. 3014-3022, Novembro, 1998. [11] _________________________ Blind Adaptive Algorithms for Minimum Variance CDMA Receivers. IEEE Transactions Vehicular on Communications, vol. 49, no. 1, pp.180-194, Janeiro, 2001. [12] WANG Z. e GIANNAKIS G .B.. Wireless Multicarrier Communications. IEEE Signal Processing Magazine, pp. 29-48, Maio, 2000. [13] WEINSTEIN S. B. e EBERT P. M. Data Transmission by Frequency Division Multiplexing Using the Discret Fourier Transform. IEEE Transactions on Communications Tech., COM-19(5), pp. 628-634, Outubro, 1971. REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 66-74 CONTRIBUIÇÕES ESPECIAIS Criação e implantação do Núcleo de Inovação Tecnológica da Marinha (NIT-MB) Capitão-de-Mar-e-Guerra (RM1) João de Amorim Litaiff Júnior Gerente do NIT-MB. E-mail: [email protected] Capitão-de-Fragata (RM1-T) Wismiley Oliveira Franco Coordenador de Propriedade Intelectual do NIT-MB. E-mail: [email protected] Suboficial (RM1-MT) Paulo Roberto dos Santos Nascimento Coordenador de Prospecção Tecnológica do NIT-MB. E-mail: [email protected] Resumo Este artigo apresenta as linhas da estruturação e do funcionamento do Núcleo de Inovação Tecnológica da Marinha (NIT-MB), implantado para atender às exigências da Lei no 10.973, de 2 de dezembro de 2004, que dispõe sobre incentivos à Inovação e à Pesquisa Científica e Tecnológica no ambiente produtivo da Marinha do Brasil – MB – . O NIT-MB foi criado por Portaria do Estado-Maior da Armada e tem como atribuições, entre outras, as de estimular a proteção intelectual dos produtos desenvolvidos por pesquisadores da Marinha, assessorar as parcerias para realização de pesquisas científicas e tecnológicas, interagir com instituições públicas, privadas e com outros núcleos na geração de conhecimentos de Ciência, Tecnologia e Inovação (CT&I), além de acompanhar e de orientar a implementação das Diretrizes de Propriedade Intelectual da MB. O NIT-MB é composto por uma Gerência de Inovação Tecnológica (GIT), que funciona na Secretaria de Ciência, Tecnologia e Inovação da Marinha e por Células de Inovação Tecnológica (CIT) sediadas em cada Instituição Científica e Tecnológica (ICT) da MB. 1. INTRODUÇÃO Nos últimos anos, a Marinha do Brasil (MB) reformulou seu Sistema de Ciência, Tecnologia e Inovação (SCTMB) com a adoção de iniciativas voltadas para o fortalecimento e a integrarção das ações de CT&I. Uma dessas iniciativas foi a criação, em março de 2008, da Secretaria de Ciência, Tecnologia e Inovação da Marinha (SecCTM)1, como órgão central executivo do SCTMB. Dessa forma, a Secretaria tem entre os seus objetivos: o do compromisso de otimizar as atividades de pesquisa e desenvolvimento das instituições de ciência e tecnologia da Marinha, bem como o de acompanhar os avanços e as tendências do conhecimento em CT&I. A criação da SecCTM foi fundamentada e efetuada em estreito alinhamento às disposições da Lei de Inovação Tecnológica (LIT) – Lei 10.973/2004–2. Essa mesma Lei, no seu Artigo 17, estipula que toda “Instituição Científica e Tecnológica deverá dispor de um Núcleo de Inovação Tecnológica (NIT), próprio ou em associação com outras ICT, com a finalidade de gerir sua política de inovação”. Nessa perspectiva, a SecCTM coordenou um Grupo de Trabalho (GT), em 2008, para elaborar as Diretrizes de Propriedade Intelectual (PI) da Marinha e para apresentar proposta de estruturação do NIT. Com base na proposta apresentada pelo GT, que em sua fase final contou com a participação de representantes dos Órgãos de Direção Geral e Setorial da Marinha, o Chefe do Estado-Maior da Armada constituiu, em julho de 2009, o Núcleo de Inovação Tecnológica da Marinha (NIT-MB)3 Portaria no115 de 31 de março de 2008, do Comandante da Marinha. Lei nº 10.973, de 02 de dezembro de 2004, conhecida como Lei de Inovação Tecnológica (LIT), regulamentada pelo Decreto nº 5.563, de 11 de outubro de 2005, que dispõe sobre incentivos à inovação e à pesquisa científica e tecnológica no ambiente produtivo e dá outras providências. 3 Portaria nº 179 de 31 de julho de 2009, do Estado Maior da Armada. 1 2 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 75-82 75 JOÃO DE AMORIM LITAIFF JÚNIOR, WISMILEY OLIVEIRA FRANCO, PAULO ROBERTO DOS SANTOS NASCIMENTO para atuar de forma integrada com as Instituições de C&T da MB. Outra importante mudança relacionada à gestão de CT&I na MB, com a criação da Secretaria de Ciência, Tecnologia e Inovação da Marinha, foi a estruturação das instituições de pesquisa e desenvolvimento. Foram consideradas ICT, à luz da LIT, as quatro Organizações Militares Prestadoras de Serviços de Ciência e Tecnologia (OMPS-C) e o Centro de Hidrografia da Marinha (CHM). Três das quatro OMPS-C passaram a ser diretamente subordinadas àquela Secretaria: o Instituto de Pesquisas da Marinha (IPqM), localizado na Ilha do Governador; o Centro de Análises de Sistemas Navais (CASNAV), localizado na Ilha das Cobras, ambos na cidade do Rio de Janeiro e o Instituto de Estudos do Mar Almirante Paulo Moreira (IEAPM), localizado na cidade de Arraial do Cabo, no Estado do Rio de Janeiro. Cabe ressaltar que o Centro Tecnológico da Marinha em São Paulo (CTMSP), mesmo sendo uma OMPS-C, continuou subordinado diretamente à Diretoria-Geral de Material da Marinha (DGMM), em função das peculiaridades inerentes às atividades da área nuclear. Consoante com a nova estruturação do Sistema de Ciência, Tecnologia e Inovação, o presente artigo enfoca as atribuições e a estrutura organizacional do NIT-MB bem como sinaliza as próximas ações a serem realizadas pela administração naval visando consolidar, cada vez mais, a gestão da inovação no âmbito da Marinha. 2. PROPRIEDADE INTELECTUAL Propriedade Intelectual (PI) é o ramo do Direito que trata da proteção concedida a todas as criações resultantes do espírito humano, sejam de caráter científico, industrial, literário, sejam de caráter artístico. A PI compreende, para o fim de proteção de direitos, os seguintes segmentos: Propriedade Industrial, Direito Autoral e Proteção Sui Generes. 76 A Propriedade Industrial, com aplicações de produtos, de processos e de serviços na indústria e no comércio, engloba as Patentes, as Marcas, o Desenho Industrial, a Indicação Geográfica, o Segredo Industrial e a Repressão à Concorrência Desleal. O Direito Autoral, de origem científica, artística e literária, por sua vez, trata dos Direitos de Autor, dos Direitos Conexos, referentes aos cantores e aos apresentadores e, ainda, dos Programas de Computador. A Proteção Sui Generes refere-se aos direitos que não se enquadram nos conceitos anteriores e aborda a Topografia de Circuitos Integrados, os Cultivares e os Conhecimentos Tradicionais. 3. NIT-MB: CRIAÇÃO E ATRIBUIÇÕES Inovação é um conceito que, usualmente, tem sido associado às atividades de C&T, aqui entendidas como esforço sistemático, diretamente relacionado com a geração, o avanço, a disseminação e a aplicação do conhecimento científico e técnico em todos os campos da atividade humana (Manual Frascati – OECD, 2002)4. Embora atividades de C&T sejam componentes importantes do processo inovativo, a geração de inovações demanda, também, outros tipos de atividades, podendo-se citar aquelas relacionadas à articulação de parcerias; à proteção dos direitos de propriedade; à comercialização e transferência das tecnologias e aos conhecimentos aplicados ao processo produtivo. Com a perspectiva de organizar e de gerenciar atividades de proteção da propriedade intelectual no processo de desenvolvimento científico, tecnológico e de inovação, o NIT-MB foi criado e assumiu como sua principal responsabilidade a gestão da Política de Propriedade Intelectual do Ministério da Defesa (MD), no âmbito da Marinha do Brasil. OECD. Frascati Manual 2002: Proposed Standard Practice for Surveys on Research and Experimental Development, 6th ed., 2002. 4 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 75-82 CONTRIBUIÇÕES ESPECIAIS Visando centralizar as decisões e facilitar a gestão administrativa, a Marinha optou por criar um único NIT, modelo que congrega as cinco ICT existentes atualmente no Sistema de Ciência Tecnologia e Inovação da MB: o Instituto de Pesquisas da Marinha ( IPqM); o Centro Tecnológico da Marinha em São Paulo (CTMSP); o Instituto de Estudos do Mar Almirante Paulo Moreira (IEAPM); o Centro de Análises de Sistemas Navais (CASNAV) e o Centro de Hidrografia da Marinha (CHM). Em consonância com o parágrafo único, do artigo 16, da Lei de Inovação, o NIT-MB passou a ter as seguintes atribuições, estabelecidas na Portaria nº 179/2009, do Estado-Maior da Armada (EMA): I - zelar pela manutenção das diretrizes da MB de estímulo à proteção das criações, licenciamento, inovação e outras formas de transferência de tecnologia; II - avaliar e classificar os resultados decorrentes de atividades e projetos de pesquisa da MB para o atendimento das disposições da Lei nº 10.973/2004; III - avaliar solicitação de inventor independente para adoção de invenção na forma do art. 22, da Lei nº 10.973/2004 e do art. 23, do Decreto nº 5.563/2005; IV - opinar pela conveniência e promover a proteção das criações desenvolvidas nas ICT e demais Organizações Militares (OM) da MB; V - opinar quanto à conveniência de divulgação das criações desenvolvidas nas ICT e demais OM da MB, passíveis de proteção intelectual; VI - acompanhar o processamento dos pedidos e a manutenção dos títulos de propriedade intelectual das ICT e demais OM da MB; VII - assessorar as IC, e demais OM da MB, quando aplicável, nos acordos de parceria para realização de atividades conjuntas de pesquisa científica e tecnológica e desenvolvimento de tecnologia, produto ou processo, bem como nos REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 75-82 contratos de transferência de tecnologia e de licenciamento para outorga de direito de uso ou de exploração de criação por elas desenvolvida; VIII - assessorar as ICT, e demais OM da MB, quando aplicável, nos processos de cessão de seus direitos sobre criação, a título não oneroso, para que o respectivo criador os exerça em seu próprio nome e sob sua inteira responsabilidade, na forma do art. 11 da Lei nº 10.973/2004 e do art. 12 do Decreto nº 5.563/2005; IX - interagir com instituições públicas e privadas, e demais NIT, na geração de conhecimentos de CT&I em áreas de interesse da MB, bem como na realização de atividades conjuntas de pesquisa científica e tecnológica e desenvolvimento de tecnologia, produto ou processo, na forma do art. 9o da Lei nº 10.973/2004 e do art. 10 do Decreto nº 5.563/2005. Para realizar tal gama de atribuições, o NITMB precisa contar com uma adequada estrutura do material e do pessoal. Torna-se, portanto, fundamental a capacitação deste na área de propriedade intelectual dos recursos humanos dedicados à proteção do intangível. 4. NIT-MB: ESTRUTURA ORGANIZACIONAL E MODELO DE FUNCIONAMENTO Por ocasião da sua criação, o NIT-MB estava inserido na estrutura organizacional da Subsecretaria de Relações Institucionais (SecCTM-30) da SecCTM, contudo, seguindo a tendência observada no Brasil5, que recomenda vincular o núcleo de inovação o mais próximo possível da direção das instituições, em 18 de março de 2010, o NIT-MB passou a ser diretamente subordinado ao Secretário de Ciência, Tecnologia e Inovação da Marinha. 5 TORKOMIAN, A.L.. Panorama dos Núcleos de Inovação Tecnológica no Brasil; In: Transferência de Tecnologia: estratégias para a estruturação e gestão de Núcleos de Inovação Tecnológica. Komedi: Campinas. Cap. 1, 21-37. 2009. 77 JOÃO DE AMORIM LITAIFF JÚNIOR, WISMILEY OLIVEIRA FRANCO, PAULO ROBERTO DOS SANTOS NASCIMENTO FIGURA 1 O NIT-MB na estrutura organizacional da SecCTM. O modelo de funcionamento estabelecido para o NIT-MB foi definido de modo a promover contínua interação com as ICT da Marinha. Dessa forma, o NIT assessora tanto as OMPS-C quanto o Centro de Hidrografia da Marinha, ICT subordinada à Diretoria de Hidrografia e Navegação. Para possibilitar essa interação, conforme ilustrado na Figura 2, o NIT-MB foi concebido com o estabelecimento de uma Gerência de Inovação Tecnológica (GIT) como órgão central, localizado na SecCTM, tendo a ela vinculadas, funcionalmente, as Células de Inovação Tecnológica (CIT), sediadas em cada uma das ICT da MB. executar integral e continuamente as atividades de CT&I, com suficiente qualificação técnica e disponibilidade de recursos materiais e humanos. FIGURA 2 Interação do NIT-MB com as ICT da Marinha Cumpre ressaltar que esse modelo tem como objetivo aumentar a troca de informações entre a GIT, as CIT, os pesquisadores e o mundo empresarial, a fim de promover ações conjuntas, uniformizar conceitos e procedimentos e de compartilhar competências e recursos. Entretanto, conforme disposto na publicação “Capacitação das OMPS-C e demais ICT da MB” (EMA-417), as ICT têm competência para 78 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 75-82 CONTRIBUIÇÕES ESPECIAIS A estrutura do NIT-MB enfatiza o papel fundamental das Células de Inovação Tecnológica, existentes em cada ICT e responsáveis pela primeira triagem dos assuntos que envolvem proteção da propriedade intelectual. Decorre dessa atuação a importância de posicionarmos a estrutura da CIT próxima da Direção da ICT, assegurando, assim, a participação do seu responsável, ou encarregado, nas reuniões para definição de projetos de pesquisa e desenvolvimento. O Plano de Desenvolvimento CientíficoTecnológico e de Inovação da Marinha (PDCTM) – EMA-410, estabelece atribuições específicas para as CIT: • manter atualizados, junto à GIT, os projetos e atividades de CT&I realizados na sua ICT; • assessorar a GIT quanto às avaliações de inventores independentes; • assessorar a GIT quanto à conveniência de promover a proteção das criações desenvolvidas na sua ICT; • assessorar a GIT no processamento dos pedidos e na manutenção dos títulos de propriedade intelectual de sua ICT; • assessorar a GIT nos acordos de parcerias para realização de atividades conjuntas de pesquisa científica e tecnológica e desenvolvimento de tecnologia, produto ou processo, bem como nos contratos de transferência de tecnologia e de licenciamento para outorga de direito de uso ou exploração de criação desenvolvida na sua ICT; • assessorar a GIT nos processos de cessão de seus direitos sobre criação a título não oneroso, para que o respectivo criador os exerça em seu próprio nome e sob sua inteira responsabilidade. FIGURA 3 Atuação do NIT-MB REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 75-82 79 JOÃO DE AMORIM LITAIFF JÚNIOR, WISMILEY OLIVEIRA FRANCO, PAULO ROBERTO DOS SANTOS NASCIMENTO Importante mencionar que, desde o início de estudos e de pesquisas, é fundamental estabelecer mecanismos de proteção da PI nos contratos de parcerias, contratos de confidencialidade, de cotitularidade de patente etc. A estrutura da GIT, ligada diretamente ao Secretário de Ciência, Tecnologia e Inovação da Marinha é constituída por uma Gerência de Inovação Tecnológica (GIT); uma Assessoria Jurídica (AssJur); uma Secretaria (SecNIT) e quatro Coordenações: Propriedade Intelectual (CoordPI), Transferência de Tecnologia (CoordTT), Prospecção Tecnológica (CoordPT) e Comercial (CoordComl). Em linhas gerais, as atribuições desses setores são as seguintes: • Gerência de Inovação Tecnológica: responde pela gestão da Política de Inovação da Instituição; executa a articulação interna e externa do NITMB, sendo responsável pela representação do NIT perante órgãos congêneres. Além disso, coordena os processos de capacitação do pessoal envolvido em PI e o relacionamento com órgãos de comunicação social. • Coordenação de Propriedade Intelectual (PI): responde pela implantação das Diretrizes de PI e pelo estímulo institucional à proteção do conhecimento. Realiza a gestão de patentes e registros da MB. • Coordenação de Contratos, Licenciamento e Transferência de Tecnologia (TT): responsável pela assessoria às ICT na elaboração e gestão de contratos e convênios e, também, por emitir parecer quanto ao licenciamento e outras formas de transferência de tecnologia. • Coordenação de Prospecção Tecnológica (TT): responsável por realizar buscas em bancos de patentes, procurando identificar as áreas do conhecimento protegidas por um dado conjunto de empresas e instituições, identificando seus titulares e inventores. Bem como, mapear, em coordenação com outros órgãos e setores, desenvolvimentos científicos e tecnológicos existentes, capazes de influenciar de 80 forma significativa a indústria, a economia ou a sociedade. • Coordenação de Comercialização: responsável por avaliar e classificar os resultados, produtos, processos e serviços decorrentes de atividades e projetos de pesquisa. Atua também na avaliação de solicitações de inventor independente para adoção de invenção, na divulgação das criações das instituições e junto a incubadoras de empresas. • Assistência Jurídica: responde pelo suporte jurídico necessário aos processos de PD&I, incluindo contratos de parcerias, de transferência de tecnologia e negociação de propriedade intelectual nos documentos enviados para análise da Advocacia Geral da União. • Secretaria: efetua o apoio administrativo, incluindo informática e manutenção do sítio do NIT. 5. NIT-MB: CAPACITAÇÃO DE PESSOAL A Secretaria de Ciência, Tecnologia e Inovação da Marinha e o Instituto Nacional de Propriedade Industrial (INPI) assinaram um Acordo de Cooperação Técnica com o objetivo de capacitar o pessoal da Marinha envolvido nas atividades de pesquisa e desenvolvimento e de promover a disseminação da cultura de Proteção Intelectual na MB. O Acordo prevê a realização de três cursos, todos com a duração de 40 horas e em níveis de aprofundamento progressivo na matéria. O Curso Básico de Capacitação em PI foi realizado em novembro de 2009, no Rio de Janeiro, para 50 militares e servidores civis da Marinha. O Curso Intermediário de Capacitação em PI, cujo prérequisito é o Curso Básico, acontecerá no período de 17 a 21 de maio de 2010, nas dependências da Escola de Guerra Naval, no Rio de Janeiro. O Curso Avançado de Capacitação em PI, tendo como pré-requisito o Curso Intermediário, tem início previsto para setembro de 2010. Algumas posições em matéria de propriedade intelectual já estão firmadas, no âmbito do NITREVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 75-82 CONTRIBUIÇÕES ESPECIAIS MB, para orientação de procedimentos no trato das questões de proteção do intangível: • Titular da patente. Será a ICT envolvida na criação. • Redação da patente. Preparada pela GIT, com assessoria da CIT (ICT) e dos pesquisadores. Para tal fim, poderá ser contratado um escritório especializado na questão. • Depósito da patente junto ao INPI. Será executado pela GIT. • Contratos de Transferência de Tecnologia e parcerias. Assinados pela ICT com assessoria e negociação conduzidas pela GIT. 6. NIT-MB: PRÓXIMOS PASSOS Numa visão futura, o NIT-MB se estruturará para prestar assessoria especializada que estimule a proteção intelectual dos produtos desenvolvidos pelos pesquisadores das ICT e que, ao mesmo tempo, contribua para incrementar a quantidade e a qualidade do desenvolvimento dos processos científicos, tecnológicos e de inovação. Para consolidar o papel do NIT-MB na gestão da inovação, faz-se necessário realizar as seguinte ações, sob coordenação da Estado-Maior da Armada: Curto e médio prazo: • Aprovar as Diretrizes de Propriedade Intelectual da MB; • Promover a divulgação interna e externa da estrutura e funcionamento do NIT-MB; • Estabelecer normas relativas à operacionalização do NIT-MB; • Prover recursos humanos e materiais, inclusive espaço físico, necessários para a implementação do NIT-MB, considerando as necessidades da GIT e das CIT; • A GIT assumir a competência, no âmbito da MB, pela gestão dos registros de Propriedade Intelectual, incluindo os encargos financeiros decorrentes, junto ao INPI; • Estudar a viabilidade e conveniência de criação de novas ICT na MB; FIGURA 4 Estrutura organizacional da GIT REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 75-82 81 JOÃO DE AMORIM LITAIFF JÚNIOR, WISMILEY OLIVEIRA FRANCO, PAULO ROBERTO DOS SANTOS NASCIMENTO • Promover cursos, simpósios, oficinas e palestras com o propósito de disseminar a cultura de proteção da Propriedade Intelectual nas organizações da MB; • Estabelecer normas relativas à gestão dos ganhos econômicos previstos na LIT e • Revisar as instruções normativas da MB a fim de adequá-las à Lei de Inovação. Longo prazo: • Estudar a viabilidade e a conveniência de utilização de incubadoras de empresas, visando à geração de produtos, processos e serviços de interesse da Marinha; • Estabelecer normas relativas ao afastamento de pesquisador público previsto na LIT e • Estabelecer normas relativas à celebração de acordos e atos administrativos com instituições de apoio, agências de fomento e instituições públicas e privadas. O Núcleo de Inovação Tecnológica da Marinha, em face das suas atribuições no contexto da SecCTM, será responsável por incrementar e possibilitar a abertura de novas frentes de atuação, facilitando caminhos para investimentos e alternativas de processos de produção e serviços por meio da qualificação de seus integrantes na gestão do conhecimento. Essa atuação representa um importante passo para o desenvolvimento tecnológico, possibilitando o aumento de competitividade das ICT e o enfrentamento de novos desafios na inovação tecnológica. Esses desafios devem ser analisados conjuntamente, pois a interação entre o NIT-MB e as ICT possibilita o desenvolvimento de projetos capazes de propagar dinamismo, promovendo eficazmente o desenvolvimento da MB frente às transformações científicas e tecnológicas do mundo moderno. http://www.secctm.mar.mil.br/nit.php Fale com o NIT-MB: [email protected] 82 REVISTA PESQUISA NAVAL, BRASÍLIA, N. 22, P. 75-82 NORMAS PARA SUBMISSÃO DE ARTIGOS À REVISTA PESQUISA NAVAL 1 - OBJETIVO A Revista Pesquisa Naval (RPN) é um periódico científico de publicação anual que apresenta à comunidade científica uma coletânea de estudos desenvolvidos por pesquisadores das áreas científica, tecnológica e de inovação, cujos temas sejam pertinentes às áreas de interesse da Marinha do Brasil. O periódico é publicado pela Secretaria de Ciência, Tecnologia e Inovação da Marinha (SecCTM) e avaliado pelo Sistema de Classificação de Periódicos, Anais, Revistas e Jornais (QUALIS) da Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES) nas seguintes categorias: “B Nacional”, na área de avaliação Engenharia III; “C Nacional”, nas áreas de avaliação das Engenharias II e IV, Geociências e Interdisciplinar; e “C Local”, na área de avaliação Química. 2 - CORPO EDITORIAL A administração da RPN será conduzida pelo Corpo Editorial composto pelo Editor, Editores-Adjuntos, Conselho Editorial e pela Comissão Editorial (“referees”), sendo: Editor-Chefe: Secretário de Ciência, Tecnologia e Inovação da Marinha. Editores-Adjuntos: Diretor do Instituto de Pesquisa da Marinha – IPqM; Diretor do Instituto de Estudos do Mar Almirante Paulo Moreira – IEAPM e Diretor do Centro de Análise e Sistemas Navais – CASNAV. Conselho Editorial, com os seguintes elementos organizacionais da SecCTM: Presidente: Subsecretário de Relações Institucionais. Membros: Encarregado da Divisão de Parcerias Estratégicas; Encarregado da Divisão de Tecnologia Industrial Básica; Ajudante da Divisão de Parcerias Estratégicas e Auxiliar da Divisão de Parcerias Estratégicas. Comissão Editorial (“referees”) Membros da comunidade científica requisitados “ad hoc”, que farão a avaliação dos artigos em submissão, observados os critérios de avaliação elaborados pelo Conselho Editorial e aprovados pelo Editor da RPN. 3 - NORMAS EDITORIAIS 3.1 – Características Gerais 3.1.1 - A publicação de artigos é aberta a pesquisadores, pertencentes ou não à Marinha, que apresentem trabalhos inéditos, isto é, não publicados em quaisquer revistas ou periódicos nacionais, sobre os seus estudos e cujos temas sejam, prioritariamente, pertinentes às áreas de interesse da Ciência, Tecnologia e Inovação da Marinha, a saber: a) Sistemas de Armas e Munições; b) Ambiente Operacional; c) Processos Decisórios; d) Sensores, Guerra Eletrônica e Guerra Acústica; e) Desempenho Humano e Saúde; f) Materiais Especiais; g) Energia; h) Arquitetura Naval e Plataformas; i) Cibernética (Tecnologia da Informação) e Comunicações; j) Nanotecnologia; k) Nuclear. 3.1.2 - Poderão ser aceitos, em caráter excepcional, a critério do Conselho Editorial da RPN, artigos que já tenham sido publicados em periódicos estrangeiros, que visem áreas de interesse da Ciência, Tecnologia e Inovação da Marinha, os quais serão submetidos à mesma avaliação de originais inéditos, acompanhados de autorização por escrito da revista estrangeira que o publicou originalmente, bem como de uma cópia do artigo publicado. 3.1.3 - Os artigos em submissão serão encaminhados ao Conselho Editorial da RPN em formato impresso, devidamente assinado(s) pelo(s) autor(es), de acordo com o Modelo I e nos termos das presentes Normas e, complementarmente, por e-mail endereçado à caixa-postal [email protected]. 3.1.4 - Os artigos em submissão não poderão ser submetidos para a publicação em outras revistas, simultaneamente com a RPN. 3.1.5 - O número de artigos para publicação por edição será limitado a um por autor. 3.1.6 - Os artigos originais serão submetidos à aprovação da Comissão Editorial (“referees”), sem qualquer identificação de autoria, garantindo que sejam preservados o critério de sigilo do autor e a isenção na submissão para avaliação por pares. 3.1.7 - O processo de seleção dos artigos envolve a avaliação prévia do Conselho Editorial da RPN, quanto ao cumprimento das Normas para Submissão de Artigos Científicos à RPN e da Comissão Editorial (“referees”), que deverão selecionar os artigos a serem publicados. 3.1.8 - No caso de haver número de artigos maior do que o comportado pela edição, os excedentes poderão ser reservados para publicação nas edições subsequentes, mediante autorização formal dos autores. 3.1.9 - Após aprovação do artigo em submissão, os autores serão comunicados formalmente e encaminharão ao Conselho Editorial a “Declaração de Responsabilidade e Transferência de Direitos Autorais para Publicação de artigo na RPN”, conforme Modelo II. No caso de autoria múltipla, a declaração será assinada por todos os autores. 3.1.10 - Após a seleção e avaliação do artigo, o Conselho Editorial da RPN poderá sugerir modificações ao autor, de modo a permitir melhor enquadramento do tema ou adequação ao padrão de formatação gráfico da revista. 3.1.11 - No intuito de zelar pelo padrão culto da língua portuguesa, o Conselho Editorial da RPN se reserva ao direito de efetuar nos originais, alterações de ordem normativa, ortográfica e gramatical, respeitando, porém, o estilo dos autores. As provas finais serão enviadas aos autores para a devida ratificação. 3.1.12 - Os autores dos artigos publicados não perceberão qualquer tipo de remuneração ou pró-labore. 3.1.13 - Os trabalhos publicados passam a ser propriedade da RPN. Fica estabelecido que a sua reimpressão, total ou parcial, estará sujeita à autorização expressa da SecCTM. Os originais não serão devolvidos aos autores. 83 3.2 – Características Técnicas 3.2.1 - Os artigos serão submetidos ao Conselho Editorial em arquivo eletrônico compactado e com tamanho máximo de 2MB, conforme item 3.1.3. 3.2.2 - A estrutura dos artigos conterá as seguintes seções, na sequência indicada: (1) Título (português e inglês); (2) Nome dos Autores; (3) Resumo (português e inglês); (4) Palavras-chave (português e inglês); (5) Introdução; (6) Metodologia de Pesquisa; (7) Resultados; (8) Discussão; (9) Conclusões e (10) Referências. Todos os itens e subitens serão numerados com algarismos arábicos. Permite-se a omissão da Seção (6) e a fusão das Seções (7) e (8), quando a natureza do trabalho assim o recomendar. 3.2.3 - O artigo possuirá até dez (10) páginas, incluindo os elementos pré-textuais, texto e pós-textuais. 3.2.4 - O título do trabalho será breve e suficientemente específico e descritivo, contendo as palavras-chave que representem o conteúdo do texto, acompanhado de sua tradução para o idioma inglês, com espaçamento entrelinhas simples, na fonte Times New Roman, tamanho 14 em negrito, com efeito itálico para o título em inglês, letras maiúsculas e minúsculas e parágrafo centralizado. 3.2.5 - O nome completo de cada autor virá seguido do título profissional, nome da instituição onde exerce atividade científica e o endereço eletrônico para contato, com espaçamento entre linhas simples, fonte Times New Roman, tamanho 10 e, somente para o nome do autor, com letras maiúsculas e minúsculas e parágrafo justificado em negrito. 3.2.6 - O resumo elaborado será de caráter informativo, com o máximo de 150 palavras, ressaltando o objetivo, o método, os resultados e as conclusões, acompanhados da sua tradução integral para o inglês - abstract, com espaçamento entre linhas simples, na fonte Times New Roman, tamanho 10, com efeito itálico para o Abstract e Keywords, letras maiúsculas e minúsculas com parágrafo justificado. 3.2.7 - O texto obedecerá a seguinte formatação: a) Arquivo eletrônico gravado com extensão “RTF” (Rich Text Format); b) Fonte Times New Roman, tamanho 12; c) Espaçamento entre linhas de 1,5; d) Alinhamento justificado; e) Uma coluna; f) Margens: superior e esquerda 3 cm; direita e inferior de 2 cm e g) Papel formato A4 (21cm X 29,7cm). 3.2.8 - As figuras, tabelas ou ilustrações devem conter legendas, créditos ou fonte de consulta. Caso haja figuras e tabelas importadas de outros programas, como Excel e Power Point, serão enviados, também, o arquivo de origem com resolução mínima de 200 DPI. As legendas, créditos ou fonte de consulta estarão em fonte Times New Roman - tamanho 10. 84 3.2.9 - A revisão gramatical e a obediência às normas de referência deverão ser obrigatoriamente providenciadas pelo autor do trabalho, antes de sua submissão. 3.2.10 - O Português é o idioma oficial da RPN. Em caráter excepcional, por decisão do Editor-Chefe, poderão ser aceitos trabalhos no idioma do autor. Esta situação deverá ser devidamente justificada quanto à impossibilidade de se realizar a tradução do texto para o idioma oficial da revista. 3.2.11 - Os agradecimentos, se for o caso, deverão ser mencionados no final do trabalho, antecedendo as referências, com espaçamento entre linhas 1,5, fonte Times New Roman, tamanho 12, letras maiúsculas e minúsculas e parágrafo justificado. 3.2.12 - As notas explicativas não serão admitidas. Os textos com essas características serão incorporados aos elementos textuais. 3.2.13 - As referências bibliográficas serão apresentadas em ordem alfabética no final do artigo, de acordo com a norma da ABNT NBR-6023/2002. Todas as referências deverão ser citadas no texto de acordo com o sistema alfabético (autor-data). 3.2.14 - A “Carta para submissão de artigo” (Modelo I) e a “Declaração de responsabilidade e de transferência de direitos autorais para publicação de artigo na Revista Pesquisa Naval” (Modelo II), enviadas pelos autores, poderão ser utilizadas no caso de listagens extensivas, estatísticas e outros elementos de suporte. 3.2.15 - Para aspectos gerais de apresentação, referências bibliográficas, citações, notas e demais detalhes, serão observadas as seguintes normas: a) ABNT – NBR 6021/2003 – publicação periódica científica impressa; b) ABNT – NBR 6022/2003 – artigo em publicação periódica científica impressa; c) ABNT – NBR 6023/2002 – referências; d) ABNT – NBR 6024/2003 – numeração progressiva; e) ABNT – NBR 6027/2003 – sumário; f) ABNT – NBR 6028/2003 – resumo; g) ABNT – NBR 10520/2002 – citações e h) Apresentação tabular do Instituto Brasileiro de Geografia e Estatística – IBGE. 4. CONSIDERAÇÕES FINAIS 4.1 - Os autores dos artigos em submissão ao respectivo processo de seleção serão oportunamente informados sobre o seu andamento, por e-mail, até a publicação da RPN. 4.2 - Os artigos publicados, bem como as opiniões emitidas nesses artigos, são de exclusiva responsabilidade do(s) autor(es). 4.3 - É de direito do(s) autor(es) o recebimento de três revistas da edição que consta a publicação de seus artigos. Caberá ao Conselho Editorial da RPN a responsabilidade do envio das revistas aos autores. 4.4 – Quaisquer solicitações de informações adicionais deverão ser encaminhadas à: Secretaria de Ciência, Tecnologia e Inovação da Marinha Subsecretaria de Relações Institucionais Conselho Editorial da Revista Pesquisa Naval Esplanada dos Ministérios, Bloco “N”, 4º andar CEP: 70055-900 – Brasília/DF e-mail: [email protected] Tel/Fax: (61) 3429-1948. MODELO I CARTA PARA SUBMISSÃO DE ARTIGO Ao Presidente do Conselho Editorial da Revista Pesquisa Naval Secretaria de Ciência, Tecnologia e Inovação da Marinha Esplanada dos Ministérios - Bloco N – 4º andar 70055-900 - Brasília – DF Assunto: Submissão de artigo à Revista Pesquisa Naval Senhor Presidente, Submeto(emos) para análise deste Conselho, o artigo intitulado “______________”, na área de interesse de Ciência e Tecnologia da Marinha de “_________________”, de acordo com o subitem 3.1.1 das Normas Editoriais para publicação na Revista Pesquisa Naval. Identificação do(s) autor(es): nome completo, filiação, função, formação, endereço, telefones de contato, e-mail e resumo do curriculum vitae anexo. Declaro(amos) que aceito(amos) as normas para submissão de artigos à Revista Pesquisa Naval, nos temos da Portaria nº ____/SecCTM/2009. Local, em _______de ______de 2___. assinatura dos autores dos artigos MODELO II DECLARAÇÃO DE RESPONSABILIDADE E DE TRANSFERÊNCIA DE DIREITOS AUTORAIS PARA PUBLICAÇÃO DE ARTIGO NA REVISTA PESQUISA NAVAL Ao Presidente do Conselho Editorial da Revista Pesquisa Naval Secretaria de Ciência, Tecnologia e Inovação da Marinha Esplanada dos Ministérios - Bloco N – 4º andar 70055-900 - Brasília – DF Assunto: Declaração de Responsabilidade e de Transferência de Direitos Autorais para publicação de artigo na Revista Pesquisa Naval. Declaro(amos) que o artigo intitulado “___________________________________”, enviado à Revista Pesquisa Naval, periódico científico da Secretaria de Ciência, Tecnologia e Inovação da Marinha, é um artigo original e o seu conteúdo não está sendo considerado para publicação em outras revistas, seja no formato impresso seja no eletrônico. Certifico(amos) que participei(amos) suficientemente da elaboração do artigo para tornar pública minha (nossa) responsabilidade pelo seu conteúdo. Cedo(emos), com exclusividade, os direitos autorais do artigo supracitado à Secretaria de Ciência, Tecnologia e Inovação da Marinha, para publicação na Revista Pesquisa Naval. Estou(amos) ciente(s) de que é vedada qualquer reprodução, total ou parcial, em qualquer outra parte ou meio de divulgação impressa ou eletrônica, sem que seja obtida, por escrito, a prévia e necessária autorização do Conselho Editorial da Revista. Aceito(amos) as condições deste termo. (todos os autores) Local, em _______de ______de 2___. Assinatura do(s) autor (es) do artigo 85 SECRETARIA DE CIÊNCIA, TECNOLOGIA E INOVAÇÃO DA MARINHA
Download