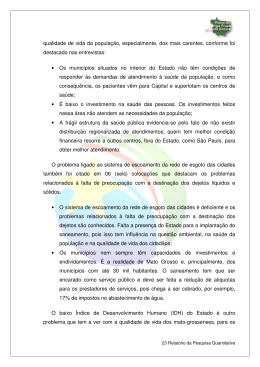
III SEREA- Seminario Hispano-Brasileño sobre Planificación, Proyecto y Operación de Redes de Abastecimiento de Agua Valencia (España) 15 – 18 junio 2004 SISTEMA COMPUTACIONAL PARA O MONITORAMENTO E CONTROLE EM TEMPO REAL DE REDES DE ESCOAMENTO Carlos de O. Galvão11, Francisco V. Brasileiro1, Cledson Souto Santana1, Érica Machado1, Esther V. Brasileiro1, Bruno Catão1, André Gomes1, Ademar Izu1, Kennedy F. M. Lucena2, Dario Aloise3 Abstract. Real-time monitoring and control of complex and large-scale pipeline networks is complicated by several requirements, among them (a) reliability of data acquisition and communication systems, (b) strict time limits between data acquisition and decision of control action, (c) operational constraints of a large number of pipeline devices, (d) multi-objective control, involving economic, operational, environmental and institutional objectives and constraints. The SmartPumping system was designed for meeting such requirements. A simulation-optimization approach is the strategy adopted for the network state prediction and control. The simulation module is based on the steady state hydraulics of the fluid flow. The control is centered on the pumping systems, respecting operational constraints of tanks and pipes, without reducing the production and/or demand targets. For real-time control, an optimization scheme generates multiple operational scenarios, the optimum of them being selected by means of a meta-heuristics approach. To meet the strict time limits for deciding the control strategy, a grid computing architecture was adopted, instead of conventional dedicated high-performance computers. Resumo. A complexidade do monitoramento e controle em tempo real de redes de tubulações para escoamento de fluidos decorre de vários fatores, entre o quais: (a) a confiabilidade dos sistemas de aquisição de dados e comunicação, (b) tempos limites entre a aquisição de dados e a decisão de controle, (c) restrições operacionais de um grande número de dispositivos, (d) controle que envolve objetivos e restrições econômicas, operacionais, ambientais e institucionais. O sistema computacional SmartPumping foi projetado para atender a esses requisitos. Uma abordagem de simulação-otimização é a estratégia adotada para a previsão e o controle do estado da rede. O módulo de simulação é baseado na hidráulica do escoamento em regime permanente. O controle é centrado nos sistemas de bombeamento, respeitando restrições operacionais de reservatórios e dutos, sem reduzir as metas de produção e/ou atendimento de demandas. Para o controle em tempo real, um esquema de otimização gera múltiplos cenários operacionais, sendo o ótimo selecionado através de meta-heurísticas. Para atender aos requisitos de tempo para decisão do controle, uma arquitetura de execução em um grid computacional foi adotada, alternativamente ao uso de computadores dedicados de alto desempenho. Palavras-chave: Sistema computacional, monitoramento, controle, otimização, redes de escoamento. 1 Universidade Federal de Campina Grande, Brasil. [email protected]. Centro Federal de Educação Tecnológica da Paraíba, Brasil. 3 Universidade Federal do Rio Grande do Norte, Brasil. 2 ST4-9 III SEREA- Seminario Hispano-Brasileño sobre Planificación, Proyecto y Operación de Redes de Abastecimiento de Agua Valencia (España) 15 – 18 junio 2004 INTRODUÇÃO O monitoramento e controle em tempo real de complexos sistemas de escoamento, como os de distribuição d’água, de perímetros irrigados e de escoamento de petróleo, envolve um grande número de variáveis e parâmetros operacionais e exige, entre outros requisitos: (a) a confiabilidade dos sistemas de aquisição de dados e comunicação, (b) tempos limites entre a aquisição de dados e a decisão de controle, (c) restrições operacionais de um grande número de dispositivos, como reservatórios, bombas, válvulas e dutos, (d) controle multi-objetivo e multi-critério, envolvendo objetivos e restrições econômicas, operacionais, ambientais e institucionais. Este artigo apresenta o sistema computacional SmartPumping (SP), projetado para atender a esses requisitos. O SMART PUMPING: OBJETIVOS E ARQUITETURA O objetivo do sistema computacional, denominado SP, é o monitoramento e controle remotos, distribuídos e em tempo real do sistema de escoamento de fluidos, de forma a garantir a máxima eficiência de movimentação e a redução do custo de consumo de energia, da pressão dos dutos, dos riscos de falhas operacionais, de perdas e de poluição ambiental. A estratégia de controle é baseada no escalonamento das bombas que determinam o escoamento na rede. Em outras palavras, dada uma rede de escoamento, o SP busca determinar quando ligar e desligar cada bomba da rede, durante um certo período no futuro (horizonte de operação), sob um modelo de simulação hidráulica da rede, uma dada previsão de vazões em escoamento e um esquema tarifário de energia elétrica, objetivando a máxima segurança operacional e o mínimo custo global. O escalonamento da utilização das bombas deve também atender a restrições de vazões e pressões nos dutos (mínimas e máximas), de capacidade de armazenamento dos reservatórios e operacionais das bombas, válvulas e demais dispositivos do sistema. Além disso, soluções que diminuam a produção não são aceitáveis. A complexidade do sistema de tubulações, a descentralização do comando e a necessidade de tomar rapidamente decisões consensuais limitam a possibilidade de otimização do escalonamento das bombas do sistema usando os métodos em prática. Por outro lado, a progressiva automação permite a implantação de sistemas computacionais de monitoramento e controle do processo, com possibilidade de obtenção de resultados relevantes em termos de redução de custos e consumo de energia, e de riscos ao meio ambiente, aumentando a produção e a segurança operacional. O sistema SP possui uma arquitetura modular e foi desenvolvido em ambiente Java, para proporcionar portabilidade entre plataformas de execução. Os módulos funcionais implementados até o momento são (Figura 1): - O módulo de monitoramento, que captura as informações sobre o estado da rede em tempo real: pressões, vazões, níveis de reservatórios, estados de funcionamento das bombas (ligadas/desligadas), etc. Estas informações podem ser adquiridas diretamente do sistema de automação da rede ou de operadores humanos. - O módulo de configuração, que manipula as informações que descrevem a rede de escoamento (dutos, bombas, reservatórios, tomadas, válvulas, registros, etc.), inclusive sua ST4-10 III SEREA- Seminario Hispano-Brasileño sobre Planificación, Proyecto y Operación de Redes de Abastecimiento de Agua Valencia (España) 15 – 18 junio 2004 topologia. Este módulo incorpora atualizações recebidas do campo e de decisões operacionais quanto à desativação ou modificações de elementos físicos da rede, transmitindo-os a outros módulos do SP que necessitarem dessa informação. A interface desse módulo é um editor gráfico de redes de distribuição. Sistema Físico Monitoramento Previsão Atuação Controle Configuração Simulação Figura 1. Arquitetura do SP. - O módulo de previsão da produção, que recebe informações de sistemas específicos quanto à produção ou demanda prevista nos próximos intervalos de tempo dentro do horizonte de operação e as repassa ao módulo de controle. - O módulo de simulação, que calcula o comportamento hidráulico da rede (pressões, vazões, perdas de carga, composição do fluido, consumo de energia, etc.) nos próximos intervalos de tempo dentro do horizonte de operação, para dadas previsões de configuração e produção, para o estado atual da rede, fornecida pelo monitoramento, e para o cenário operacional prescrito pelo controle (bombas ligadas/desligadas). - O módulo de controle, executado em intervalos de avaliação pré-definidos e determina a melhor decisão operacional para os intervalos de avaliação no horizonte de operação, através de rotinas de otimização, que levam em conta toda a rede física. A otimização é realizada com base em geração de cenários, simulados pelo módulo de simulação, levando em conta os objetivos da operação (segurança operacional e ambiental e minimização de custos). A decisão operacional prescrita pelo módulo de controle pode ser enviada diretamente ao módulo de atuação, caso essa opção esteja ativa, ou, caso contrário, pode ser submetida ao operador, que pode modificá-la antes da atuação na rede. ST4-11 III SEREA- Seminario Hispano-Brasileño sobre Planificación, Proyecto y Operación de Redes de Abastecimiento de Agua Valencia (España) 15 – 18 junio 2004 - O módulo de atuação, que é a interface entre o SP e a rede em campo, caso esteja ativo, recebe um escalonamento do módulo de controle, executa uma rotina de consistência e, caso obtenha sucesso nessa operação, aplica o escalonamento ao sistema físico. Monitoramento O SP integra informações monitoradas na rede de dutos, coletadas automaticamente por sensores distribuídos nos seus elementos. A informação é continuamente armazenada em um banco de dados, de modo a criar séries históricas, que poderão ser utilizadas posteriormente em diagnóstico de falhas, modelagem de processos e auditoria do sistema. Quando, por motivo de falha nos sensores ou na comunicação remota, a informação do monitoramento em tempo real não estiver disponível, ou não for confiável por qualquer razão, poderão ser utilizadas estimativas produzidas por modelos baseados nos dados históricos. Simulação O módulo de simulação é baseado na hidráulica do escoamento do fluido em regime permanente para redes ramificadas. Na Figura 2 apresenta-se uma configuração de rede hidráulica ramificada que demonstra as potencialidades do SP. Assume-se que a rede é formada por reservatórios, bombas, dutos e nós. Os reservatórios são classificados em receptores e produtores de fluido. O fluido escoa dos reservatórios produtores para os outros elementos da rede e destes para o reservatório receptor. Todos os elementos nas extremidades da rede são reservatórios, ou conjuntos de reservatórios, sendo que, em toda a rede, há apenas um reservatório (ou conjunto) receptor de todo o fluido escoado. Alguns reservatórios podem ser, ao mesmo tempo, receptores e produtores. Estes reservatórios definem sub-redes dentro do sistema. Bombas e reservatórios são conectados através de dutos, enquanto que a conexão entre dutos se dá nos nós. A determinação das pressões e vazões na rede é realizada através de procedimento numérico iterativo, já que estas variáveis são hidraulicamente interdependentes. Foram implementadas regras de mistura de fluidos provenientes de dutos diferentes, que é uma situação típica em redes de escoamento de petróleo. A variação de estado entre os intervalos de tempo de simulação é provocada pelo balanço hídrico nos reservatórios, sujeita também a mudanças na configuração física da rede e no escalonamento das bombas determinado pelo módulo de controle. Assim, a cada intervalo de simulação todo o estado hidráulico da rede é novamente calculado. Controle O controle é focado nos sistemas de bombeamento, respeitando restrições operacionais de capacidade de armazenamento dos reservatórios e de pressões e vazões mínimas e máximas nos dutos, sem modificar as metas de escoamento. O procedimento ótimo de controle em tempo real é decidido, a cada intervalo de tempo de operação, através de uma abordagem pela qual um esquema de otimização gera múltiplos cenários operacionais, sendo o ótimo selecionado através de metaheurísticas. Este procedimento é baseado nas técnicas de Algoritmos Genéticos (AG) (GOLDBERG, 1989) e Variable Neighborhood Search (VNS) (MLADENOVÍC,1997), que utilizam regras heurísticas relacionadas ao comportamento hidráulico e operacional da rede de ST4-12 III SEREA- Seminario Hispano-Brasileño sobre Planificación, Proyecto y Operación de Redes de Abastecimiento de Agua Valencia (España) 15 – 18 junio 2004 escoamento. Estas regras têm um papel muito importante em encontrar estratégias de controle viáveis e ótimas no limitado tempo de processamento disponível. No SP a função objetivo é o custo com energia por volume de fluido bombeado para o reservatório receptor do sistema. As variáveis de estado correspondem ao estado de cada uma das bombas do sistema em um determinado tempo, podendo ter dois valores: ligada e desligada. O algoritmo visa, portanto, encontrar os valores dessas variáveis para os quais o resultado da função seja mínimo (chamados valores ótimos). r ub ede 2 r eserv r eceptor r uto ub ede 1 b ombase b m série omba r eserv prod utores bom bas emp aralelo Rese r mistura de fluidos reserv. produtor darede 1 e ub tanque receptor r da sub ede 3 rvatório ub ede 3 r eserv prod utores Bom ba Figura 2. Configuração de sistema de escoamento demonstrativo das potencialidades do SP. ST4-13 III SEREA- Seminario Hispano-Brasileño sobre Planificación, Proyecto y Operación de Redes de Abastecimiento de Agua Valencia (España) 15 – 18 junio 2004 Diversas heurísticas têm sido utilizadas em problemas de rede de escoamento como este (WALSKI, 1999). Os AGs são uma família de modelos computacionais inspirados na Teoria da Evolução, seguindo o princípio da seleção natural proposto por Darwin (GALVÃO e VALENÇA, 1999). Uma implementação de um algoritmo genético começa com uma população aleatória de cromossomos, os quais representam possíveis soluções do problema a ser resolvido. No SP cada cromossomo da população consiste em uma solução para o escalonamento temporal das bombas, onde cada gene assume os valores 0 ou 1, que representam se uma determinada bomba está em operação ou não, em um dado intervalo de tempo, formando uma matriz bi-dimensional tempo versus bomba. Dado o elevado custo computacional inerente aos algoritmos genéticos, o grande número de possíveis soluções para o problema, e a impossibilidade de avaliá-las dentro de um tempo aceitável para uma aplicação em tempo real, adaptou-se o algoritmo genético clássico introduzindo operadores genéticos modificados e algumas regras de descarte de indivíduos. Estas adaptações são baseadas no conceito de viabilidade do cromossomo. Um escalonamento de bombas, ou seja, um cromossomo, só é considerado viável caso nenhuma restrição de segurança do sistema seja violada. Os operadores genéticos modificados, aqui chamados de operadores direcionados, fazem uso de uma marca introduzida em cada cromossomo no primeiro ponto de inviabilidade por ele provocada. Esta técnica reduz a aleatoriedade do AG e acelera o melhoramento entre gerações, reduzindo o tempo necessário para convergir. Um outro algoritmo de otimização utilizado no SP é o VNS. O VNS provê uma boa solução para buscas locais e é também amplamente utilizado na solução de problemas de busca de um ótimo global (MLADENOVÍC,1997). O VNS não segue uma trajetória específica, mas explora vizinhanças de uma solução previamente encontrada que, no caso do SP, é fornecida por um calculador de solução viável que, utilizando regras de operação, tenta encontrar um escalonamento viável de bombas ao longo do tempo. Sobre esta solução são aplicadas regras de vizinhança para busca de uma nova solução. PROCESSAMENTO PARALELO Um dos aspectos mais interessantes de heurísticas como o AG ou o VNS é que, embora elas sejam lentas, a paralelização dos algoritmos é trivial. Uma outra característica importante destes algoritmos é o baixo acoplamento entre as suas diversas tarefas, em especial nas implementações multi-populacionais e mestre-escravo (CANTÚ-PAZ,1998). Isso facilita a escolha do ambiente de execução, visto que os requisitos da aplicação são facilmente atendidos nas diferentes plataformas de execução paralela. Para atender aos requisitos de tempo para decisão do controle, a arquitetura em grid computacional foi adotada, alternativamente ao uso de computadores dedicados de alto desempenho. Processos executados em um ambiente grid utilizam recursos computacionais espalhados na rede da corporação, incluindo aqueles regularmente utilizados para atividades de propósito geral (FOSTER et al., 1999) . O gerenciador do grid, uma camada de software intermediária responsável pela gerência dos recursos, coordena-os de maneira a realizar cooperativamente a execução dos processos de otimização do controle. O principal atrativo desta ST4-14 III SEREA- Seminario Hispano-Brasileño sobre Planificación, Proyecto y Operación de Redes de Abastecimiento de Agua Valencia (España) 15 – 18 junio 2004 solução é poder alocar uma infinidade de recursos, muitas vezes ociosos, a uma aplicação paralela e fazê-lo a baixo custo, sendo ainda bastante escalável. INTERFACE O SP possui um ambiente amigável de execução que permite a edição rápida e simples de redes de escoamento, assim como a edição do controle operacional do sistema de bombeamento e das demandas. Ainda possibilita a edição de restrições para as tubulações (pressões e velocidades), reservatórios (níveis), de modo que alarmes sejam ativados quando as restrições forem atingidas. Além disso, o SP dispõe as saídas dos resultados de forma visual ou impressa, em gráficos e tabelas, com respostas instantâneas ou globais. E possui uma ferramenta de auxílio à identificação de erros de edição. Na Figura 3 é apresentada uma tela de rede editada no SP. PERSPECTIVAS FUTURAS DO SP A concepção inicial do SP foi o desenvolvimento de um sistema computacional para a otimização da operação de sistemas de escoamento que necessitam de um controle complexo de reservatórios e de estações de bombeamento em tempo real, objetivando a máxima racionalização econômico-energética e segurança ambiental. Embora o SP possa auxiliar no dimensionamento e na reabilitação de redes, essas não são tarefas primordiais do mesmo. Assim, constituem novas perspectivas para o SP torná-lo uma ferramenta de dimensionamento otimizado de redes e, aplicável a redes de distribuição que trabalhem com sistemas elevatórios e também com distribuição por gravidade. Figura 3. Visualização de uma rede editada pelo SP. ST4-15 III SEREA- Seminario Hispano-Brasileño sobre Planificación, Proyecto y Operación de Redes de Abastecimiento de Agua Valencia (España) 15 – 18 junio 2004 AGRADECIMENTOS O software SmartPumping foi desenvolvido com recursos do Ministério da Ciência e Tecnologia do Brasil – Fundo Setorial do Petróleo e Gás (CT-PETRO) – através da Financiadora de Estudos e Projetos (FINEP), e recursos da Petróleo Brasileiro SA (PETROBRAS). REFERÊNCIAS BIBLIOGRÁFICAS CANTÚ-PAZ, E. A Survey of Parallel Genetic Algorithms. Technical Report IlliGAL 97003, University of Illinois at Urbana-Champaign, 1998. FOSTER, I., KESSELMAN, C. (editors). The Grid: Blueprint for a New Computing Infrastructure. Morgan Kaufmann Publishers. 1999. GALVÃO, C., VALENÇA, M. (org.) Sistemas Inteligentes: Aplicações a Recursos Hídricos e Ciências Ambientais. Ed. Universidade/UFRGS/ABRH, 1999. GOLDBERG, D. Genetic Algorithms in Search Optimization and Machine Learning. Addison-Wesley, 1989. MLADENOVÍC, N. AND HANSEN, P. Variable Neighborhood Search. Comps. in Opns. Res. 24, 1097-1100,1997. WALSKI, T. Using Extended period Simulation Models for Design and Simulation. EWRI/ASCE Annual Conference, "Preparing for the 21st Century," Tempe, 1999. ST4-16
Baixar