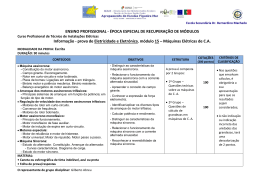
X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil DESENVOLVIMENTO DE UM SISTEMA INTELIGENTE PARA DIAGNÓSTICO DE FALHAS NOS ENROLAMENTOS DO ESTATOR DE MOTORES DE INDUÇÃO VINÍCIUS SANTOS AVELAR, LANE MARIA RABELO BACCARINI, GLEISON FRANSOARES VASCONCELOS AMARAL. DEPARTAMENTO DE ENGENHARIA ELÉTRICA, UNIVERSIDADE FEDERAL DE SÃO JOÃO DEL-REI - UFSJ PRAÇA FREI O RLANDO, 170, CENTRO, 36.307.352 SÃO JOÃO DEL-REI, MG, BRASIL E-MAILS: [email protected], [email protected], [email protected] Abstract The short circuit is a severe shortage that occurs in the stator windings. It starts from a few turns, but with the warming of the isolated place, caused by the fault current which is very high, make this spread. Hence the importance of diagnosing the fault in its beginning. In this context, then Support Vector Machine (SVM) is a tool of considerable importance for standard classification. From some training data, it can diagnose whether or not there is a short circuit beginning, which is important for predictive maintenance. Keywords SVM, MIT, Fault Diagnosis, Initial Short Circuit. Resumo O curto circuito é uma falta severa que pode ocorrer nos enrolamentos do estator. Ele começa envolvendo poucas espiras. A corrente no curto-circuito é muito elevada e provoca aquecimento localizado que rapidamente se estende para outras seções do enrolamento. Portanto, é muito importante diagnosticar este tipo de falha no início antes que provoque perda do motor e parada não programada. Nesse contexto, a Máquina de Vetor de Suporte (SVM) é uma ferramenta de apreciável importância para classificações de padrões. A partir de alguns dados de treinamento, ela pode diagnosticar se há ou não a falta em seu começo, o que é importante para a manutenção preditiva. Palavras-chave SVM, Diagnóstico de falhas, Curto-Circuito Inicial. 1 Introdução A evolução das técnicas de produção tem aumentado de forma sensível à capacidade produtiva das plantas industriais, podendo-se afirmar que esse aumento é causado principalmente pelo aumento da capacidade produtiva de seus equipamentos. Como as etapas do ciclo de vida destes equipamentos exigem elevados investimentos, notadamente as etapas de manutenção e operação necessitam garantir altos índices de disponibilidade e confiabilidade. Tais níveis podem ser obtidos através da redução do número de falhas e o gerenciamento de suas severidades, que fornece ainda, como benefício adicional, o aumento da segurança da planta (Azevedo e outros, 2005). Os custos da manutenção representam a maior parte dos custos operacionais de toda a fabricação. Podem representar entre 15% a 40% dos custos de muitos produtos. Estudos de gerenciamento de manutenção indicaram que um terço do custo total de manutenção é desperdiçado com procedimentos inadequados ou desnecessários (Baccarini, 2005). Estudos reais apresentados em (de Almeida, 2010) comprovaram a redução do risco de falhas em empresas que implementaram técnicas de manutenção preditiva. O levantamento foi realizado pela “Plant Performance Group” (uma divisão da “Technology for Energy Corporation”) e foi projetado para quantificar o impacto da inclusão de técnicas de manutenção preditiva como parte chave da filosofia da gerência de manutenção. O grupo de amostra incluía uma variedade de indústrias de geração de energia elétrica, papel e celulose, processamento alimentício, têxteis, ferro e aço, alumínio, e outras indústrias de manufatura ou de processo. Os participantes tinham programas de manutenção preditiva ISSN: 2175-8905 - Vol. X estabelecidos com um mínimo de três anos de implementação. De acordo com os resultados do levantamento, as maiores melhorias foram obtidas em custos de manutenção, falhas não programadas da máquina, tempo parado para reparo, redução de peças no estoque, e recompensas diretas e indiretas de hora extra. Em complemento, o levantamento indicou uma melhoria substancial na vida da máquina, produção, segurança do operador, qualidade do produto, e lucro global. O levantamento determinou que o aviso antecipado dos problemas da máquina e sistemas reduziu o risco de falha destrutiva. De acordo com os autores da pesquisa “Este benefício tem sido apoiado por várias empresas de seguro, que tem oferecido reduções em benefícios para fábricas que possuam, em andamento, um programa de manutenção preditiva baseada em condição.” Atualmente existem diversos métodos utilizados para detecção de curto-circuito nas espiras do estator na área de manutenção preditiva, porém muitos deles se mostram de baixo custo/benefício, ineficazes ou mesmo de difícil aplicação em processos reais. Outra questão existente é o fato de que muitos processos rodam de forma contínua ou estão em ambientes agressivos, exigindo que o monitoramento ideal seja feito sem parada da máquina, de forma não invasiva e, principalmente, sem expor o técnico ao contato direto com a máquina. Os enrolamentos do estator de motores de indução trifásicos são submetidos a estresse induzido por diversos fatores: efeitos térmicos; vibrações mecânicas; estresse de tensão em acionamentos a freqüência variável (Fang e Hongzhong, 2006). Resultados das pesquisas realizadas pelo IEEE mostraram falhas no estator representam 36% do total de falhas em motores de indução. A deterioração do isolamento do estator normalmente começa com curto-circuito 474 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil envolvendo poucas espiras de uma mesma fase. A corrente de falta é aproximadamente duas vezes a corrente de rotor bloqueado e provoca aquecimento localizado que rapidamente se estende para outras seções do enrolamento (Tallam e outros, 2003). Assim, a detecção de falhas entre espiras é especialmente importante, pois é o começo para a ocorrência das demais falhas que podem resultar em perdas irreversíveis. Por isso, nos últimos anos, a detecção de falhas vem despertando muito interesse na comunidade científica. Estudos mostram que o impacto da falha nas características do motor é pequeno, o que dificulta a sua detecção. Os métodos baseados na análise da corrente elétrica (MCSA) não são invasivos e não requerem a interrupção da operação dos sistemas de acionamentos (Benbouzid, 2000). A medição é feita por sensores comuns (TCs - transformadores de corrente) e muitas vezes já estão presentes na aplicação a ser monitorada (Baccarini, 2010). Bartmann e outros (2009) comprovaram a eficiência da utilização de técnicas de inteligência artificial na detecção inicial de curto-circuito entre espiras. O método proposto utiliza apenas os sinais dos sensores de corrente. Nesse caso, utilizou-se as SVMs, do inglês Support Vectors Machine, para diagnostico da presença da falha. As Maquinas de Vetores de Suporte foi desenvolvida por Vapnik (1999), com o intuito de resolver problemas de classificação de padrões e vem recebendo grande atenção nos últimos anos. Algumas de suas características que as tornam atrativas são: i) Boa capacidade de generalização; ii) Robustez em grandes dimensões; iii) Convexidade da função objetivo. A técnica ainda é pouco explorada na área de manutenção preditiva. Em relação à detecção e diagnostico de falhas em motores de indução trifásicos a técnica deve ser incentivada (Widodo e Yang, 2008). O trabalho de Bartmann e outros (2009) forneceu significativa contribuição, mas para o projeto das SVMs foi necessário obter dados do sistema com falhas, o que inviabiliza a sua utilização na prática. Desta forma, o objetivo deste trabalho é propor uma técnica para a detecção inicial de curto-circuito entre espiras de uma mesma fase, ou seja, curto-circuito entre poucas espiras, visando sua implementação em uma planta real. O trabalho apresenta resultados de simulações e resultados de testes experimentais, validando a técnica proposta. o monitoramento contínuo do motor para a detecção da falha (Sottile e outros, 2000). Em Thomson e Fenger (2001) são apresentadas analises de curtocircuito entre espiras de um motor de indução de baixa tensão. Segundo os autores, mesmo com um percentual significativo de curto-circuito (20% de espiras em curto-circuito), o motor funcionou por 20 minutos antes da perda total do mesmo. Warren e Stone (1998) descreveram os procedimentos dos testes normalmente utilizados para detecção de falhas no isolamento de maquinas. Os estudos são referentes aos seguintes testes: alto potencial, voltagem escalonada, impulso e descargas parciais. A conclusão que os autores chegaram é que os testes individualmente não são perfeitos, ou seja, não são sensíveis para todos os tipos de falhas de isolamento. O curto-circuito provoca o desequilíbrio de impedâncias entre as três fases do motor tendo como conseqüência o aparecimento de componentes de sequências negativas de corrente e de impedância. Entretanto os desequilíbrios entre as tensões do estator inerentes ao sistema de alimentação do motor produzem o mesmo impacto, ou seja, provocam o aparecimento de componentes de sequências negativas de corrente e de impedância, o que dificulta mais ainda o diagnostico da falha. Portanto, qual e o melhor padrão para o diagnostico da falha? As Maquinas de Vetores de Suporte (SVMs) vem recebendo grande atenção nos últimos anos (Cristianini e Shawe-Taylor, 2000). O destaque das SVMs está em sua capacidade de generalização, permitindo a sua utilização em diversas áreas do conhecimento. A técnica ainda é pouco explorada na área de manutenção preditiva e, em relação à detecção e diagnóstico de falhas em motores de indução trifásicos a técnica deve ser incentivada (Widodo e Yang, 2008). 2 Metodologia sendo: - número de espiras que não estão em curtocircuito; - número de espiras que estão em curtocircuito e - número total de espiras de uma fase. 2.1 Revisão de Literatura O tempo de evolução de falhas de curto-circuito entre espiras para as demais falhas (curto-circuito entre bobinas de uma mesma fase e entre bobinas de fases diferentes e, curto-circuito entre fase e terra) não pode ser estimado, pois depende das condições de operação do motor. O que se sabe e que a velocidade de evolução é rápida, justificando, dessa forma, ISSN: 2175-8905 - Vol. X 2.2 Modelo Assimétrico do Motor O modelo simétrico da maquina de indução é conhecido na literatura. O modelo assimétrico que permite analisar assimetrias no estator e na rede de alimentação foi desenvolvido em Baccarini (2010) e Tallam e outros (2003). O percentual de espiras em curto é dado pela expressão: = = (1) As tensões do estator (Vas, Vbs, Vcs) são transformadas para o eixo dq através da aplicação da Transformada de Park, obtendo-se as seguintes expressões: + cos θ = r i + + (2) 475 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil + sin = r i + − (3) em que é a corrente de falta. As equações do circuito do rotor são idênticas às do rotor do modelo tradicional. As equações em coordenadas dq para o cálculo dos fluxos do estator e do rotor são: = + − cos (4) sendo: , e mútua; = + − sin = + − cos (6) = + − sin (7) (5) – indutâncias próprias do estator, do rotor – Correntes de estator de eixo direto e de quadratura; - Correntes de rotor de eixo direto e de quadratra; – Enlace de fluxo do estator de eixo direto e de quadratura; – Enlace de fluxo do rotor de eixo direto e de quadratura. A tensão e o enlace de fluxo nas espiras em curto-circuito podem ser explicitados em função das correntes de eixo dq0. = cos + sin − + = As implementações das equações de (1) a (10) permitem obter os fluxos, a velocidade, o torque e as correntes para a operação do motor em condições de curto-circuito. As componentes em coordenadas dq (direto e de quadratura) podem ser transformadas para as coordenadas de fase abc. Os sinais no tempo podem ser analisados no domínio da frequência utilizando a ferramenta Fast Fourier Transform. Para tal implementação, fez-se os ensaios sem carga e de rotor travado para obtenção dos parâmetros do circuito equivalente do motor presente no laboratório. Os ensaios foram executados conforme a Norma Brasileira (NBR 5383). Os parâmetros do circuito equivalente do motor (3CV, 220V, 60Hz, 4 polos) obtidos através dos ensaios são: = 1,81 Ω, = 0,36 Ω = 1,60 Ω, X = 3,72 Ω e X = 30,53 Ω 2.3 Simulação Computacional Usou-se a implementação do modelo simétrico e assimétrico do motor para a geração de um banco de dados para treinamento e validação da SVM. A tabela 1 mostra a variação dos parâmetros utilizados nas simulações. Tabela 1. Variação dos parâmetros, dados simulados Parâmetro Valor Mínimo Valor Máximo Carga Tensão Espiras em curtocircuito (percentual de falhas) 50 (%) 85 (%) 0 (%) 100 (%) 105 (%) 5 (%) (8) = sin + cos + sin + cos − sin + cos − + (9) O conjugado do motor é obtido pela expressão 10. O 1o termo representa o conjugado desenvolvido pelo motor que é idêntico ao conjugado do motor simétrico. O 2o termo é conseqüência da falha de curto-circuito e depende do número de espiras em curto-circuito e da corrente de curto-circuito. 3 = − + 22 ( sin − cos ) (10) A figura 1 ilustra uma bobina do estator com curto-circuito. Figura 1. Representação do enrolamento do estator do motor com curto-circuito, figura extraída de Baccarini (2005). ISSN: 2175-8905 - Vol. X 2.4 Implementação Prática A bancada de teste montada no Laboratório de Pesquisa Experimental do Departamento de Engenharia Elétrica foi utilizado para a implementação do modelo. O sistema é constituído de: motor de indução que recebeu projeto especial para a simulação da falha; máquina de corrente continua; sistema de medição; encoder; microcomputador com o software LabView instalado; varivolt trifásico; resistências; placa de aquisição da National Instuments. O motor foi rebobinado de forma a permitir a simulação de percentuais de curto-circuito entre as espiras de uma mesma bobina. A configuração permite analisar curto-circuito entre, no mínimo, três espiras e, no máximo, trinta e três espiras. Para aquisição de dados, analisou-se o curto entre três e seis espiras. Para limitar a corrente de curto, foi inserida uma resistência em série com as espiras a serem curto circuitadas. Para a variação da carga, utilizouse um reostato para controlar a corrente de excitação de campo da máquina de corrente continua, que alimentava algumas lâmpadas. Foi montado um banco de dados para várias condições de operação e percentuais de curto- 476 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil circuito. A tabela 2 apresenta as variações dos parâmetros em relação aos valores nominais do motor. nosticar se o motor pode continuar a operar ou se é necessária a interrupção para manutenção. Tabela 2. Variação dos parâmetros, dados reais Parâmetro Valor Mínimo Valor Máximo Carga Tensão Espiras curtocircuitadas 0 (%) 65 (%) nenhuma 110 (%) 105 (%) 6 espiras Figura 3. Estrutura do Decisor Vale ressaltar que a bancada era sempre movida após a realização de alguns testes. Também se calçou a bancada para poder causar uma pequena variação na altura da mesma. Esses procedimentos permitiram analisar se a presença de falhas mecânicas prejudicava o diagnóstico de curto-circuito. Após cada teste de curto-circuito, foi executado teste de operação simétrica. A figura 2 apresenta a bancada e os acessórios utilizados para a realização dos testes experimentais. 3 Resultados 3.1 Simulação Computacional A figura 4 apresenta os dados de corrente distribuídos no plano R³ da componente fundamental da corrente normatizada. Observa-se que os dados são misturados e que é necessário um mecanismos para a separação entre as classes. Figura 4. Componentes de 60 Hz das correntes R³ Figura 2. Bancada experimental 2.5 Classificação dos padrões Os dados foram classificados em duas condições: Condição 1: Motor simétrico, ou seja, sem a presença de curto-circuito ( = 0); Condição 2: Presença de curto-circuito inicial. Para todos os treinamentos, foi testado o parâmetro kernel, a função linear e a função Radial Bases Function (RBF), com variância de 0.001 a 1. Os parâmetros de regularização das SVM foram variados de 1 a 1000000. Foram feitas as combinações possíveis desses parâmetros e tomados os melhores resultados. Foram usados os dados de corrente de componente fundamental e de terceira harmônica e da componente fundamental da tensão. É importante ressaltar que as Máquinas de Vetores de Suporte foram treinadas de modo a acertar o máximo da condição 1 ausência de falha, pois desse modo evita-se a parada não necessária do motor devido a falsos alarmes. A figura 3 apresenta o esquema da metodologia que foi utilizado. O decisor é responsável por diag- ISSN: 2175-8905 - Vol. X , no plano A tabela 3 contém a quantidade de testes simulados computacionalmente, utilizados para o treinamento e validação da rede e a tabela 4 confirma o bom desempenho da SVM para a classificação de padrões. Os parâmetros utilizados para o treinamento e validação da SVM.foram as correntes fundamentais e de terceira harmônica. A tabela 5 apresenta o melhor resultado para o treinamento utilizando corrente e tensão fundamental. Tabela 3. Quantidade de simulações. Condição 1 Condição 2 Treinamento Validação 100 100 250 250 Tabela 4. Quantidade de acertos para cada condição. Condição 1 Condição 2 Treinamento Validação 100 % 100 % 99,6 % 99,2 % Tabela 5. Quantidade de acertos para cada condição. Condição 1 Condição 2 Treinamento Validação 100 % 97 % 99,2 % 88,2 % 477 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil 3.2 Validação Prática Condição 2 A figura 5 mostra a distribuição das correntes da componente de 60Hz normatizadas do sistema no plano R³. Por essa figura percebe-se, assim como na simulação, a dificuldade de separar as duas classes, ou seja, sem defeito da condição de presença de falhas de curto-circuito inicial entre espiras. 25 55 Tabela 7. Quantidade de acertos para cada condição. Condição 1 Condição 2 Treinamento Validação 100 % 100 % 100 % 83,64 % Para essa condição, foi utilizado a corrente e a tensão fundamental normatizadas, pois apresentaram o melhor resultado. É importante destacar que não ocorreu uma falta grave que seria a de diagnosticar curto na operação simétrica, pois esse erro causaria a parada desnecessária do acionamento. A tabela 8 mostra o acerto total, tanto para a condição 1 quanto para a condição 2. Tabela 8. Quantidade de acertos total Figura 5. Componentes de 60Hz das correntes no espaço: resultados experimentais. A figura 6 mostra a distribuição das componentes de 180 Hz das correntes normatizadas, distribuídas no espaço e a figura 7 apresenta a distribuição das componentes de 60Hz das tensões , normatizadas. Figura 6. Componentes de 180 Hz das correntes no espaço. Figura 7. Componentes de 60Hz das tensões , no espaço. As figuras 6 e 7 mostram que o impacto do curto-circuito inicial não é facilmente representado pela terceira harmônica da corrente e que também não causa um desequilíbrio considerável na tensão. A tabela 6 apresenta a quantidade de testes reais utilizados para o treinamento e validação da rede e a tabela 7 mostra os resultados de acertos individualmente, em porcentagem, para cada condição. Tabela 6. Quantidade de simulações. Condição 1 ISSN: 2175-8905 - Vol. X Treinamento Validação 45 55 Acertos Treinamento Validação 100% 91,8182% Proposta de diagnóstico Assim, concluiu-se que a técnica proposta pode ser utilizada no diagnóstico de falhas de curtocircuito inicial. É importante ressaltar que o método utiliza apenas os sinais de sensores normalmente presentes na planta industrial. Mas, a grande desvantagem do método proposto é a necessidade de dados de falhas reais para o projeto da SVM o que inviabiliza a sua utilização numa planta real. Assim a motivação principal do nosso trabalho foi responder o seguinte questionamento: Será que as SVMs projetadas com dados de simulação podem ser utilizadas com os dados reais? Ou seja, o sistema treinado a partir dos parâmetros do modelo representa bem a planta real? A partir dos ensaios de rotor travado e de rotor bloqueado foram obtidos os parâmetros do motor de indução trifásico. Utilizando o modelo dinâmico simétrico e assimétrico os dados de treinamento foram obtidos. Após o projeto da rede com os dados de simulação utilizou-se dados reais (experimentais) para analisar o desempenho da rede. A tabela 9 apresenta a quantidade de testes gerados. Para o treinamento foram utilizados dados simulados e para a validação dados reais. A tabela 10 mostra os resultados de acertos individualmente, em porcentagem e o acerto total, utilizando a corrente e a tensão fundamental normatizadas. Tabela 9. Quantidade de simulações. Condição 1 Condição 2 Treinamento 100 100 Validação 100 80 Tabela 10. Quantidade de acertos. Condição 1 Treinamento 99,995 % Validação 73 % 478 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil Condição 2 Acertos totais 95 % 94,50% 68,75 % 71,1111% 4 Conclusão O curto-circuito é uma falta severa e deve ser diagnosticado inicialmente para evitar perdas maiores, como a parada não programada da produção ou até mesmo a perda irreversível do motor. O trabalho mostrou a eficiência da SVM para diagnóstico de faltas nas máquinas de indução. O índice total de acerto para o caso da utilização de SVM treinadas a partir de dados de simulação foi de 71%. O sistema apresentou desempenho significativo uma vez que nos experimentos o curto-circuito foi controlado por uma resistência que limitou as correntes no curto em valores inferiores à corrente nominal da máquina. Este procedimento foi necessário para evitar a queima da máquina em função do número de testes realizados. Na prática a corrente de curto é de aproximadamente 14 (quatroze) vezes a corrente nominal. Assim, os índices de acerto seriam bem superiores ao encontrado. Para prosseguimento e conclusão definitiva da robustez da técnica proposta é necessária a compra e o rebobinamento de mais motores de modo a permitir os testes de curtocircuito franco, ou seja, sem a necessidade de um resistor de controle da corrente. O trabalho mostrou também que a presença de pequenas falhas mecânicas não compromete o sistema de diagnóstico de falhas de curto-circuito. 5 Agradecimentos Agradecemos a FAPEMIG que financiou este trabalho através do programa PIBIC/FAPEMIG/UFSJ e a Capes (Procad/UFMG/UFPE/UDESC/UFSJ). 6 Referências Bibliográficas Azevedo, H. R. de; Souza, S. P. S; Martins, F. R. (2005). Sistemas para Diagnóstico Automático de falha. Dificuldades e Soluções para Obtenção de Resultados. XX Congresso Abraman. Baccarini L. M. R. (2005). Detecção e Diagnóstico de Falhas em Motores de Indução, Faculdade de Engenharia Elétrica, UFMG,179 p. Tese. Baccarini, L.M.R.; Menezes, B.R. de; Caminhas, W.M. (2010). Fault induction dynamic model for computer simulation: simulation results and experimental validation, Mech. Syst. Signal Process. 24 (1) 300–311. Bartmann S, Amaral, G. F. V e Baccarini, L. M. R (2009). Utilização de Máquinas de Vetores de Suporte para o Diagnostico de Curto-Circuito Inicial entre Espiras do Estator de Motores Trifasicos, Anais do IX Congresso Brasileiro de Redes Neurais / Inteligencia Computacional. ISSN: 2175-8905 - Vol. X Benbouzid, Mohamed E. H. (2000). “A review of induction motors signature analysis as a medium for faults detection,” IEEE Trans. Ind. Electron., vol. 47, pp. 984–993. Cristianini, N e Shawe-Taylor (2000), J. An Introduction to Support VectorMachines, Cambridge Univ Press, available: www. supportvector.net. de Almeida M. T. (2010) -Manutenção Preditiva: Benefícios e Lucratividade. Professor da Escola Federal de Engenharia de Itajubá. Consultor em Monitoramento de Máquinas pela MTA. Itajubá – MG. Fang R e Hongzhong Ma (2006). “Application of MCSA and SVM to Induction Machine Rotor Fault Diagnosis”. Intelligent Control and Automation, WCICA - The Sixth World Congress on. 2, pp.5543 – 5547 IEEE IAS Motor Reliability Working Group, Report of large motor reliability survey of industrial and commercial installations: Part 1, IEEE Transactions on Industry Applications IA-21 (4) (1985) 853–864. IEEE IAS Motor Reliability Working Group, Report of large motor reliability survey of industrial and commercial installations: Part 3, IEEE Transactions on Industry Applications IA-23 (1) (1987) 153–158. Sottile J., Trutt, FC and Kohler J.L (2000). Experimental Investigation of On-Line Methods for Incipient Fault Detection- Conf. Rec. IEEEIAS, (4), pp: 2682-2687. Tallam, R.M.; Lee, S.B.; Stone, G.; Kliman, G.B.; Yoo, J.; Habetler, T.G.; Harley, R.G. (2003). A survey of methods for detection of stator related faults in induction machines, in: 4th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives, SDEMPED, pp. 35–46. Thomson W.T e Fenger, M. (2001). Current signature analysis to detect induction motor faults, Industry Application Magazine, IEEE, July. 2001, pp. 26-34. Vapnik V.N. (1999) An overview of statistical learning theory. IEEE Transactions on Neural Networks, 10(5): pp. 988–999. Warren, V. e Stone, G (1998). Recent developments in diagnostic testing of stator windings. Electrical Insulation Magazine, vol. 14, pp. 16-21. Widodo, A. Yang B. S. (2008), Wavelet support vector machine for induction machine fault diagnosis based on transient current signal, Expert Systems with Applications 35 (2), pp 307316. 479
Baixar