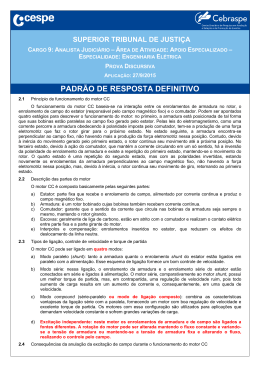
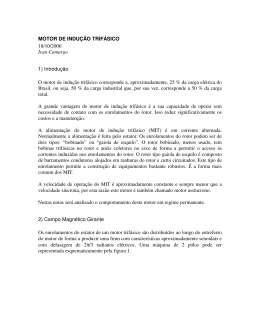
Laboratório de Conversão Eletromecânica de Energia B Profa . Katia C. de Almeida 1 Obtenção Experimental dos Parâmetros do Circuito Equivalente do Motor de Indução Monofásico 1.1 1.1.1 Introdução Motores de Indução Trifásicos Nesses motores, as correntes nas três fases da bobina do estator produzem um campo magnético girante dado por b(θ, t) = Bm senωtsenθ onde: Bm = amplitude da densidade de fluxo no entreferro distribuida senoidalmente e produzida por um enrolamento de estator conduzindo uma corrente de freqüência ω. θ = ângulo de deslocamento no espaço medido do eixo do enrolamento da fase a do estator (campo). A f mm resultante no estator em qualquer instante de tempo, =, é composta pela soma das f mms de cada fase do motor (=a , =b , =c ). Cada enrolamento de fase produz uma f mm que varia com o tempo ao longo do eixo do enrolamento do estator. Para a fase a tem-se então: =a (θ, t) = =m cos ωt cos θ Analogamente, para as fases b e c tem-se: =b (θ, t) = =m cos (ωt − 120o ) cos(θ − 120o ) =a (θ, t) = =m cos(ωt + 120o ) cos(θ + 120o ) A fmm resultante é então 3 = = =m cos(ωt − α) 2 A Figura 1 indica o campo induzido na fase a do motor, as f mms de todas as fases e a f mm resultante no motor. Estando as correntes no estator e a densidade de fluxo distribuı́das senoidalmente, e considerando que a corrente em cada fase esteja defasada de Ψ graus do campo girante da mesma fase, tem-se que o torque final desenvolvido pelo motor é dado pela seguinte equação p T = π Jm Bm `r cos Ψ 2 onde Jm = p= `= r= densidade máxima de corrente no estator número de polos do motor comprimento axial do rotor raio do rotor 1 Campo Induzido F mms Induzidas Figura 1: Motor Trifásico Portanto, o torque é constante para um dado valor de Ψ. Na partida do motor, o campo do estator, girando à velocidade sı́ncrona, induz um torque no rotor no sentido de alinhar seu campo com o campo do estator. À medida em que o rotor aumenta sua velocidade, o campo do estator passa a cortar com uma taxa menor as bobinas do rotor. Isso reduz a f mm induzida resultante por fase, diminuindo a corrente nos condutores do rotor e fornencendo menor torque. O processo continua até que o rotor atinja uma velocidade tal que forneça f mm suficiente para produzir apenas a corrente necessária para desenvolver um torque igual ao torque contrário devido às perdas por atrito ou à carga acoplada. Enquanto existir um torque contrário a ser vencido, a velocidade do rotor não será igual à velocidade sı́ncrona. Além disso, pode-se observar que as correntes trifásicas geram um torque de partida no motor já que, neste caso tem-se Ψ 6= 90o . 1.1.2 Motores de Indução Monofásicos Esses motores consistem de um enrolamento de estator com distribuição senoidal e um rotor gaiola. A tensão CA é aplicada o estator que cria uma distribuição de campo. Visto que há uma única bobina onde circula corrente alternada, o fluxo no entreferro é fixo no espaço e de módulo variável. Para o rotor parado, supondo que o campo φ se comporte como indicado na Figura 2-a (aumenta no sentido ascendente), uma tensão é induzida no rotor tendo distribuição que permita que a f mm do rotor se oponha ao fluxo variável, o que corresponde à circulação da corrente no rotor como indicado na figura. Tem-se então que o ângulo entre a densidade de corrente e a densidade de fluxo é Ψ = 90o . O que resulta em T = 0 e o motor não pode dar partida. Entretanto, se o rotor é colocado em movimento, a defasagem entre campo e corrente deixa de ser 90o e aparece um torque diferente de zero no sentido do movimento levando o rotor à velocidade normal. É necessário então modificar o motor de indução monofásico para que ele se aproxime das condições de um motor trifásico. Isso é feito transformando-o num motor onde as bobinas possuem eixos defasados por 90o elétricos e onde as correntes que circulam nas bobinas estejam também defasadas de 90o elétricos e possuam módulos que resultem em f mms iguais. Isso é conseguido introduzindo-se um enrolamento auxiliar com eixo em quadratura ao eixo do enrolamento principal. Em um motor com fase auxiliar com capacitores de partida, um 2 capacitor é colocado no circuito do enrolamento auxiliar para se obter uma defasagem de 90o entre as correntes do enrolamento principal e auxiliar levando ao aparecimento de um torque de partida diferente de zero (Figura 2-b). Após a partida, o enrolamento auxiliar é desligado quando a velocidade do motor ultrapassa 75% da velocidade sı́ncrona. (a) Campo Induzido (b) Capacitor de Partida Figura 2: Motor Monofásico Pode-se demonstrar que a f mm resultante na configuração possui amplitude constante e igual à amplitudes das f mm induzidas nos enrolamentos do motor. Além disso, a f mm é uma onda trafegante tal como se observa nos motores de indução trifásicos. 1.2 Circuito Equivalente do Motor de Indução Monofásico No motor de indução monofásico, as correntes em quadratura induzem um campo alternado expresso por b(θ, t) = Bm senωtsenθ Usando a identidade trigonométrica 1 1 senx cos y = sen(x − y) + sen(x + y) 2 2 tem-se 1 1 b(θ, t) = Bm sen(ωt − θ) + Bm sen(ωt + θ) 2 2 Ou seja, o campo é decomposto numa componente que se move no sentido de θ > 0 (campo girante direto) e outra componente que se move no sentido contrário (campo girante inverso). Quando não existe dispositivo de partida, b(θ, t) = 0 pois os campos girantes se anulam. Para o rotor parado, o circuito equivalente do motor pode ser representado por: Figura 3: Circuito Equivalente Simplificado 3 Ou ainda, evidenciando os campos opostos, por Figura 4: Circuito Equivalente - Motor de Indução Monofásico Onde Ėf = f em produzida pelo campo direto no enrolamento do rotor referido ao estator. Ėb = f em gerada pelo campo girante oposto referido ao estator. Quando for dada a partida e o rotor atingir a velocidade n no sentido direto, o motor opera com o escorregamento ns − n n s= =1− ns ns onde ns é a velocidade do campo girante do estator. No circuito equivalente associado ao campo girante direto, o efeito de s é representado pela resistência r2s2 0 . Por outro lado, se o motor gira no sentido direto e o campo no sentido inverso tem-se sb = ns − (−n) n =1+ ns ns Combinando as duas últimas expressões tem-se que sb = 2 − s Sendo assim, na seção do circuito onde os efeitos do campo inverso são indicados tem-se a r2 0 resistência 2(2−s) . O circuito equivalente do motor de indução monofásico é então representado na Figura 5. Na operação normal do motor monofásico, 0 < s ≤ 0, 15. Sendo assim, a impedância total associada com o campo direto é muito maior do que a impedância associada ao campo inverso. Como a corrente que passa pelas duas impedâncias é a mesma, |Ėf | >> |Ėb | e o campo direto que gera Ėf , φf , é muito maior do que o campo inverso φb que gera Ėb . 4 Figura 5: Circuito Equivalente 1.3 Cálculo dos Parâmetros do Circuito Equivalente Os testes de rotor travado e à vazio são realizados também nos motores monofásicos para determinar seus parâmetros. Devido às caracterı́sticas do circuito equivalente do motor monofásico, os circuitos obtidos nos testes de rotor travado e a vazio são ligeiramente diferentes daqueles obtidos nos ensaios com motor trifásico. Além disso, devido ao tamanho reduzido dos motores monofásicos, as suas perdas rotacionais são associadas às perdas no entreferro. 1.3.1 Teste com o Rotor Travado Neste caso, o escorregamento do motor, s = 1, implicando que Xm , Rf >> r022 + j x022 . Desta forma, o circuito equivalente pode ser simplificado para o indicado na Figura 6. Figura 6: Circuito Equivalente - Ensaio de Rotor Travado Para os cálculos dos parâmetros, algumas aproximações são feitas: • r1 = r02 ; 5 • x1 = x02 . Sendo Irt e Vrt os valores dos módulos da corrente e tensão, e Prt o valor da potência ativa obtidos no teste com o rotor travado, tem-se: Req = r1 + r02 = Prt 2 Irt Vrt I qrt 2 = x + x0 = |Żeq |2 − Req 1 2 |Żeq | = Xeq 1.3.2 Teste com o Motor a Vazio Neste caso, s ≈ 0 e portanto r022 é muito elevada podendo o circuito série referente ao campo r02 girante no sentido direto ser considerado um circuito aberto. Por outro lado, 2(2−s) ≈ r042 . Sendo assim, o circuito equivalente é simplificado para o indicado na Figura 7 Figura 7: Circuito Equivalente - Ensaio a Vazio Para obtermos Rf e Xm é necessário calcularmos a tensão V̇ab . Sendo I0 e V0 os valores dos módulos da corrente e tensãp e P0 o valor da potência ativa obtidos no teste a vazio, tem-se P0 cos θ = V0 I0 e h r02 x02 i + j x1 + V̇ab = V̇0 − I˙0 ∠−θ r1 + 4 2 Então a impedância equivalente relativa ao circuito de magnetização é Żm = V̇ab = a + jb I˙0 Considerando que Rf e Xm se encontram em paralelo tem-se 1 2 2 = + a + jb Rf jXm 6 o que resulta em Rf Xm a2 + b2 a a2 + b2 = 2 b = 2 Por fim, pode-se calcular as perdas rotacionais em conjunto com perdas no entreferro usando a equação r02 P0 = Pf + I02 r1 + + Prot 4 1.4 Ensaio Figura 8: Diagrama de Conexões 1.4.1 Ensaio a Vazio 1. Aplicar tensão nominal (110V ) com o capacitor de partida ligado ao motor. 2. Fazer as medidas de V0 , I0 , P0 1.4.2 Ensaio com o Rotor Travado 1. Aplicar tensão Vrt necessária para circular corrente nominal no motor (Inom = Irt .) travando o eixo do rotor. 2. Medir Vrt , Irt , Prt . 3. Faça nova medida desconectando o capacitor de partida do circuito. Verifique se houve uma diferença considerável. 1.4.3 Cálculos Com os valores obtidos nos ensaio, calcule r1 , r02 , x1 , x02 , Rf e Xm . Obtenha também as perdas associadas ao entreferro em conjunto com as perdas rotacionais. 7 1.5 Bibliografia 1. Del Toro, V.; Electromechanical Devices for Energy Conversion and Control Systems. New Jersey (USA), Prentice Hall, Inc., Englewood Cliffs, 1968. 8
Baixar