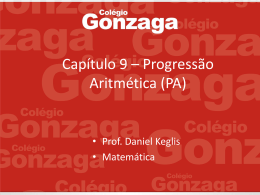
PONTIFÍCIA UNIVERSIDADE CATÓLICA KRISTIANO SIMAS TRIDAPALLI LEONARDO ARAUJO DA SILVEIRA PROJETO: Tanque de Gauss CURITIBA 2012 2 PONTIFÍCIA UNIVERSIDADE CATÓLICA KRISTIANO SIMAS TRIDAPALLI LEONARDO ARAUJO DA SILVEIRA PROJETO: Tanque de Gauss Projeto apresentado à disciplina de Resolução de problemas em engenharia, Curso de Engenharia de Computação, como requisito parcial para obtenção de nota, pelos alunos da Pontifícia Universidade Católica. Profº. Orientador: Me. Afonso F. Miguel. CURITIBA 2012 3 Plano de Trabalho Projeto Tanque de Gauss Kristiano Tridapalli Leonardo A. da Silveira - PUCPR 1. Introdução Sabe se que o eletromagnetismo possui grande capacidade de energia, podendo transforma-la em qualquer outro tipo. Um dos exemplos é o Canhão de Gauss que é um dispositivo que provoca uma reação magnética em cadeia para aumentar a energia cinética final de um projétil. Tais dispositivos são também denominados como “espingardas de Gauss” (Gauss rifle) ou “estilingues magnéticos”, em função do efeito final que produzem. Partindo desta ideia, criamos o Tanque de Gauss, que consiste em um canhão de Gauss acoplado a uma plataforma móvel. 1.1 Justificativas Utilizando a base móvel, o Canhão de Gauss ganha mais uma vantagem e o diferencia do restante dos projetos. O Tanque de Gauss será controlado por um controle remoto através de um arduino para fácil manipulação do usuário. O projeto será dividido em duas partes principais: a plataforma para locomoção e o canhão de Gauss em si. A base móvel consiste em dois motores DC para o funcionamento das rodas. O controle fará os motores funcionarem simultaneamente para eles se locomoverem corretamente. O canhão em si será montado no topo da base móvel para fácil acesso e demonstração. Seu disparo será feito através de um comando fornecido pelo controle. Em 2012 a marinha dos EUA começa testes de canhão de Gauss. O protótipo (Figura 01) possui uma potência de disparo de 33 megajoules (MJ). Para comparar, 1 MJ equivale à energia libertada após o impacto do caminhão contra a parede a uma velocidade de 160 km/h. Baseando-se em cálculos preliminares, o alcance do projétil lançado desse canhão pode atingir, pelo menos, 200 milhas náuticas. O Departamento Militar dos EUA conta que este tipo de arma será aprimorada até 2017. Fig. 01 - Canhão de Gauss em forma de pistola para testes da Marinha 4 A loja Thinkgeek, que faz brinquedos relacionados à ciência, vende um canhão de Gauss (Figura 02) como disparador para derrubar pinos, parecido com boliche. Esse canhão de Gauss custa $29,99 reais. Fig. 02 - Brinquedo baseado em Canhão de Gauss O canhão de Gauss produzido (Figura 03) é um lançador linear magnético que utiliza esferas de aço e ímãs de neodímio, dispostos sobre um trilho de madeira (o "cano" de um canhão de Gauss). O objetivo deste dispositivo é lançar um projétil com grande velocidade da extremidade do trilho, tal como um canhão lançaria uma bala de seu cano. Em primeiro lugar, é recomendado utilizar um trilho de tamanho apropriado e que ele seja construído de tal forma a produzir a menor força de atrito possível entre o trilho de madeira e as esferas. Em segundo, lugar, caso os ímãs tenham a mesma intensidade, eles devem ficar os mais firmes possíveis e a uma distância equivalente entre si. Entretanto, se tiverem intensidades diferentes, devese ajustar a distancia que um ímã ficará do outro. Em terceiro lugar as esferas devem ser posicionadas do início do trilho para o seu fim. Fig. 03 – Desenho de um Canhão de Gauss em perspectiva Atualmente existem vários modelos de bases motorizadas para diversos tipos de arduinos. Muitos deles são utilizados para construções de carros de controle remoto e outros pequenos projetos. Com a adição de um canhão de Gauss nós criamos mais uma função para estas bases, criando uma brincadeira inofensiva e divertida. 1.2 Metodologia O trabalho será feito com a orientação do Professor Afonso F. Miguel e dois alunos, Kristiano Tridapalli e Leonardo A. da Silveira. O sistema se consiste em fazer um canhão de Gauss acoplado a uma plataforma móvel controlada por um dispositivo remoto fazendo um usuário dirigir o canhão de Gauss. Temos um trilho (de material não-ferromagnetico) onde ficam presos quatro ou cinco imãs de NEODIMIO. Na área não magnética desse imã há algumas bolinhas de ferro no primeiro imã, tem duas. A primeira bolinha é lançada com um pequeno impulso, a bolinha rola lentamente até perto do imã, que começa a atraí-la com a energia magnética. Ela bate no imã e transfere essa energia através do imã para próxima bolinha que estava na frente do imã. E esse movimento se segue até a última bolinha, que graças à soma das energias do magnetismo e das batidas das outras bolinhas, vai conter mais energia cinética. O projeto será realizado por nós com ajuda da PUC-PR com seus laboratórios e disponibilização de ferramentas. Haverá testes do canhão e da plataforma móvel, o teste de funcionamento de cada peça e do arduino. 5 1.3 As responsabilidades Para este trabalho ser concluído com êxito deverá ter completa determinação do grupo: Kristiano Tridapalli, Leonardo A. da Silveira, e orientador Afonso F. Miguel. Ajuda dos professores em nosso curso especializados com possível tempo para consulta ao trabalho, também disponibilidade maquetaria e terá que ser fornecido laboratórios adequados para manuseio deste trabalho com devidos acessórios fornecidos pela PUC. 2. Os objetivos Demonstrar a atuação de forças magnéticas em máquinas elétricas através do estudo da energia potencial magnética e sua transformação em energia cinética através da ação de um campo magnético sobre um corpo ferromagnético. Objetivo uma base móvel com um canhão de gauss na superfície do tanque equipado com quatros motores dc movidos por ponte h, comandos do tanque e o canhão de gauss são feitos por controle remoto com ligação infravermelha. 3. Não está incluso no escopo deste projeto Movimentação de rotação do canhão, sistema de mira para o canhão, movimentação em ângulos da base móvel e sensores de estacionamento. 4. O projeto O projeto se determina em fazer canhão de Gauss que dispara uma esfera de metal. O canhão estará preso a uma base móvel controlada por um dispositivo remoto. Fig. 05 – Diagrama de blocos Como visto no diagrama de blocos (Figura 05), as funções iniciam-se pelo controle, que dará os comandos desejados pelo usuário. Esses comandos serão lidos pelo arduino que fará a base móvel fazer seus movimentos para frente, os lados ou para trás. O arduino também fará o controle do disparador quando o usuário apertar o botão (controle), onde será mandado 5v ao disparador fazendo 6 assim a esfera rolar e acionar o canhão de Gauss, quando disparado imediatamente outra bolinha será recolocado no lugar pelo recarregador. Fig. 06 – Fluxograma do projeto Como observado no fluxograma do projeto (Figura 06), o pressionar do botão no controlador inicia todo o processo de funcionamento. A partir do comando enviado pelo controle, a comunicação entre o controle e o arduino é iniciada. Então o software começa a rodar e verificar se o comando é para a base móvel, para o canhão ou se o comando não foi designado para função nenhuma. Verificados o comando, o software inicializa a comunicação entre as demais áreas do projeto. Se a comunicação for para o canhão, o arduino manda as devidas funções para o disparador e o recarregador. Se for para a base ele manda os comandos para os motores do carrinho. 5. Os resultados esperados Como resultados deste projeto, serão apresentados aos superiores os seguintes itens. 1. 2. 3. 4. 5. 6. Correto funcionamento dos motores DC. Funcionamento do Canhão de Gauss como o previsto. Administração do arduino com os componentes. Comandos por controle infravermelho. Recarregador das munições. Disparador. 6. Os requisitos Para realizar o projeto com sucesso teremos que ter os seguintes itens, fornecimentos pela PUCPR. 7 1. Disponibilidade dos laboratórios. 2. Disponibilidade de equipamentos fornecidos pela PUCPR. 3. Disponibilidade de computadores. 4. Disponibilidade da maquetaria. 5. Disponibilidade dos Professores. 7. A Equipe de Desenvolvimento A equipe será orientada pelo Professor Afonso Miguel e desenvolvido por Kristiano Tridapalli e Leonardo A. da Silveira. ALUNOS ________________________ LEONARDO ARAUJO DA SILVEIRA ________________________ KRISTIANO TRIDAPALLI 8
Download