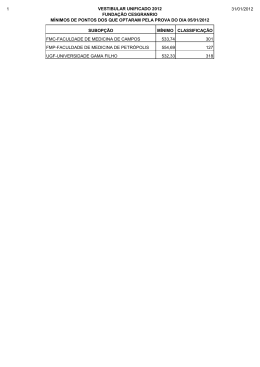
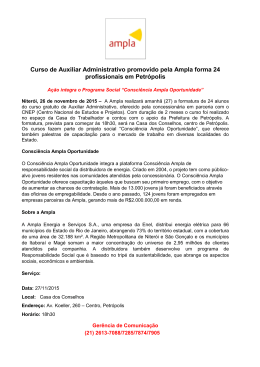
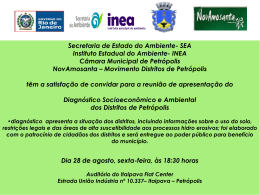
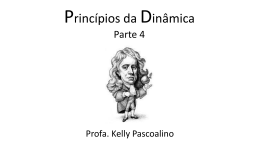
XVII Encontro de Modelagem Computacional V Encontro de Ciência e Tecnologia de Materiais Universidade Católica de Petrópolis (UCP), Petrópolis/RJ, Brasil. 15-17 out. 2014 ANALISE DE TENSÕES ATUANTES NO MENISCO HUMANO VIA MÉTODOS DE RIGIDEZ À 180º,135º,90º E 45º DE FLEXÃO ARTICULAR DURANTE O EXERCICIO DE AGACHAMENTO ESTATICO-ANÁLISE COMPARATIVA DE RESULTADOS Tatyanna Assumpção de Macedo – [email protected] Centro Universitário Geraldo di Biase –UGB/ FERP. Rua Deputado Geraldo Di Biase nº 81; Aterrado- Volta Redonda-RJ Natalie Von Paraski- [email protected] Centro Universitário Geraldo di Biase –UGB/ FERP. Rua Deputado Geraldo Di Biase nº 81; Aterrado- Volta Redonda-RJ 1. Resumo O presente trabalho tem por objetivo o estudo das propriedades mecânicas do menisco durante o agachamento estático em quatro posições de angulação do joelho pré determinadas à 180º, 135º , 90º e 45º, tais como tensão máxima atuante por área, rigidez, índice de deformação,por exemplo,visto que esta peça articular e responsável, em parte, por absorver e distribuir as cargas atuantes nos membros inferiores do corpo humano, tanto em repouso quanto em movimento. Devido à impossibilidade de coletar dados de maneira prática, foram utilizadas técnicas de determinação por meio de softwares computacionais para a realização de cálculos matemáticos não só para obter as tensões impostas, mas também para simular o efeito destas em relação à deformação plástica sofrida pela estrutura. Vale ressaltar que a visão presente dos meniscos, nesse caso, é puramente mecânica, uma vez que o joelho, articulação à qual a peça se insere, caracteriza-se por uma estrutura complexa, com anatomia variada, porém, com funções análogas à peças mecânicas existentes. Os estudo foi realizado de maneira à obter uma analise comparativa entre as posições escolhidas em relação às propriedades mecânicas analisadas. Palavras-chave:Meniscos,Tensões,Biomecânica,Joelho,Rigidez. 2. Introdução A articulação do joelho é parte importante na transmissão de movimentos e das cargas impostas aos membros inferiores. Sua interação neuromuscular e esquelética configura um sistema de articulação em dobradiça, com movimentos limitados a certo grau de liberdade transmitido por tendões e músculos que configuram cabos; os meniscos e capsula articular funcionam como coxins distribuindo absorvendo cargas, alem do liquido sinovial, que lubrifica toda a estrutura e atua também na absorção de cargas. As articulações do joelho são, frequentemente, acometidas por lesões associadas a atividades desportivas ou do cotidiano [4].Em dissertação concluída pelo mesmo autor[4], foram apresentados resultados referentes ao estudo do comportamento do corpo meniscal submetido à tensao compressiva durante o exercicio de agachamento estatico quando a articulação do joelho encontra-se à 90º de flexão. Dando continuidade ao estudo, utilizando a mesma metodologia, foram escolhidas quatro posições criticas: 180º,90º ,135º e 45º para o exercício de agachamento estatico. XVII Encontro de Modelagem Computacional V Encontro de Ciência e Tecnologia de Materiais Universidade Católica de Petrópolis (UCP), Petrópolis/RJ, Brasil. 15-17 out. 2014 3- Metodologia: A aplicação das cargas foram formuladas de modo a respeitar os graus de liberdade da articulação; a angulação do joelho determinou o tipo de força aplicada para cada região do corpo do menisco, visto que estas se diferenciam em compressivas e cisalhantes de acordo com a angulação aplicada, podendo coexistir dentro da estrutura num todo ou agirem em separado dependendo do grau de liberdade e da magnitude da força aplicada. Após e calculo dos parâmetros e da deformação do corpo meniscal, respeitando os princípios da Mecânica dos Sólidos, calculou-se a deformação, a partir de uma área infinitesimal determinada através de mapeamento gráfico, para estimar as forças atuantes no corpo meniscal, de acordo com a área onde cada força esta atuando, bem como o ângulo de flexão deste de acordo com a posição articular. 3.1 - Condição de Equilíbrio Para calcular os parâmetros propostos para os graus de flexão exigidos, foi criado um programa através do software MatLab.Este programa usa como dados de entrada o peso estimado em kg (posteriormente transformado pelo mesmo em Newton) e medidas antropométricas lineares do individuo em questão, como a altura total e medidas de cada segmento. Para o procedimento de coleta de dados, os meniscos lateral e medial foram considerados como uma peça única, cujas partes circulares representando os meniscos possuem as mesmas medidas de raios e de espessura única, com a mesma rigidez e propriedades ao longo de sua estrutura (isotrópico). A cada posição articular, forças de compressão e cisalhamento agem sobre os meniscos, cujos valores dependem do grau de flexão desta. Neste trabalho, as posições articulares escolhidas foram 180º, 135º, 90º e 45º de flexão do joelho por representarem as quatro posições onde as forças compressivas assumem os maiores valores e deslocamentos referentes ao corpo do menisco em conjunto com a movimentação dos outros componentes da capsula articular. Considerou-se a força atuante sempre máxima, para todas as posições. Para todos os estudos de caso apresentados no trabalho citado, considera-se um indivíduo de peso 51 kg e altura de 1,68m. As medidas desse corpo são apresentadas na tabela 1. Tabela 1- Medidas lineares do corpo de prova por segmento. Segmento Comprimento (cm) Cabeça 13,00 Tronco 38,00 Antebraços 42,00 Braços 55,00 Mãos 25,00 Coxas 29,00 Pernas 25,00 Pés 17,00 Considerou-se o comprimento inicial do menisco sendo de 6,25cm e sua deformação máxima em torno de 1,4% ao longo de seu eixo de comprimento linear transversal. Logo, o tamanho final do menisco será 6,337cm. A carga de peso atuante no sistema será a força referente à soma dos pesos dos segmentos descontados o peso dos pés e pernas, pois estes se encontram abaixo da linha do eixo articular do joelho. XVII Encontro de Modelagem Computacional V Encontro de Ciência e Tecnologia de Materiais Universidade Católica de Petrópolis (UCP), Petrópolis/RJ, Brasil. 15-17 out. 2014 Numa primeira etapa, o programa calcula o peso por segmento e total do individuo, tendo como dado de entrada o peso corporal deste. O programa estima através deste dado o peso de cada elemento corporal (cabeça, mãos, pés, pernas, coxas, tronco, braços e antebraços) e pelo somatório destes fornece o peso total dos segmentos corporais do indivíduo em questão.Segundo Chandler et all [2], pode-se determinar o peso por segmento utilizandose dados antropométricos, de acordo com expressões apresentadas na Tabela 2. Tabela 2- Peso corporal dos segmentos (Chandler et all, in:Investigation of inertial properties of the human Body.AEML Technical Report, PP 74-137.Wright –Pastterson Air force Base,1975) Segmento pés pernas coxas tronco cabeça braços antebraços mãos Peso total dos segmentos (N) Equações do peso por segmento 2. [(0,009 .PC)+2,48] 2. [(0,044 .PC)-1,75] 2.[(0,127 .PC)-14,8] (0,532. PC)-6,93; (0,032. PC)+18,7; 2.[(0,022.PC)+4,76] 2.[(0,013.PC)+2,41] 2.[(0,005.PC)+0.75); Ʃpeso dos segmentos(N) Após calculo do peso corporal total e por segmento, são feitas as medições de comprimento linear para cada segmento em questão, segundo padrões de antropometria, tendo como referência seu alinhamento ao longo do eixo y, sendo representados como a altura do ponto inserido neste eixo em relação ao eixo x, caracterizando os dados de entrada do sistema em questão. A localização do centro de massa de cada segmento é relativo à posição do segmento para um eixo de coordenadas X e Y cartesianas locais de cada elemento de um indivíduo, sendo representada pelo posicionamento do centroide corporal , com dependência dos ângulos de posicionamento dos segmentos corporais em relação ao eixo y. Tabela 3- Angulações dos segmentos relativos ao eixo y no plano cartesiano. Ângulo/Segmento 180º 135º 90º 45º pé 0 0 0 0 perna 0 160 155 145 coxa 180 135 90 45 tronco 0 10 15 25 cabeça 0 10 10 15 braço 90 90 90 90 antebraço 90 90 90 90 mão 90 90 90 90 As angulações são consideradas como fixas, em referência à dinâmica ideal de execução do exercício visando obter valores máximos de rendimento durante esta, cujos valores se apresentam em radianos para cada angulação/elemento. A determinação do centro de massa de cada segmento e global, de acordo com um eixo de coordenadas X e Y locais das extremidades distais e mediais cada elemento, de um XVII Encontro de Modelagem Computacional V Encontro de Ciência e Tecnologia de Materiais Universidade Católica de Petrópolis (UCP), Petrópolis/RJ, Brasil. 15-17 out. 2014 individuo em relação ao posicionamento estático deste é baseada em correlações biométricas, conforme descrito nas equações 1,2,3,4 e 5: ηsegmento = (π. ηsegmento)/180 (1) Xdistal = Csegmento. Sen (ηsegmento)+ P (2) Ydistal = Csegmento. Cos (ηsegmento) (3) Xproximal= Csegmento. (60/100). Sen (ηsegmento) + Xextremidade (4) Yproximal= Csegmento.60. Cos (ηsegmento) (5) Onde: ηsegmento = ângulo do segmento em radianos; P= posição segmento anterior no eixo x; Csegmento = medida do segmento em metros; Xdistal e Ydistal = distância entre a extremidade do seguimento e oposta ao corpo principal; Xproximal e Yproximal= distancia do seguimento mais próximo a extremidade em relação ao corpo principal. O calculo da localização do centro de massa de cada segmento e global, de acordo com um eixo de coordenadas X e Y locais (pontos médios internos) de cada elemento, de um individuo em relação ao posicionamento estático deste obedece às seguintes correlações abaixo: X= Ʃ[( Psegmento. Xproximal)/Pst] (6) Y= Ʃ[( Psegmento. Yproximal)/Pst] (7) Onde: Psegmento= peso de cada segmento; Pst= peso total dos segmentos. Os valores dos ângulos de posição dos segmentos em graus foram convertidos para valores em radianos. 3.2 - Determinação dos Esforços 3.2.1 – Discretização da Área Para fins de se determinar a área física total do menisco humano, realizou-se o mapeamento gráfico através de imagens fornecidas pela literatura. De posse destas imagens, cria-se uma grade gráfica, onde a imagem foi inserida como pano de fundo; divide-se então esta grade em subáreas regulares. Vale ressaltar que estas áreas, representadas em cada quadricula, trabalham de maneira independente umas das outras, como se fossem as molas “ensacadas” de um colchão. Após a criação da grade, para cada posição de agachamento considerada, referente aos componentes do sistema ao qual o menisco este inserido (fêmur e tíbia), fez-se a marcação das áreas sob tensão compressiva a cada posição de interesse. Essa marcação obedece ao movimento do sistema articular em questão, sendo as áreas de tensão correspondentes às áreas de contato menisco/fêmur. Usando a mesma metodologia de mapeamento para o estudo,parra as quatro posições criticas de execução do exercício em questão ( 180º,135º,90º e 45º) foram realizados os mapeamentos das áreas de tensão do corpo meniscal nas posições determinadas.Em seguida, realizou-se o mapeamento das áreas para cada posição , onde cada subárea corresponde à representação de uma mola; O sistema tem um total de 1.352 molas, atuando sozinhas ou em conjunto, sob tensão compressiva em determinada posição articular. Os movimentos possíveis para a articulação do joelho são a flexão, extensão, rotação e translação do corpo do menisco, em referência ao movimento realizado pelo platô tibial. XVII Encontro de Modelagem Computacional V Encontro de Ciência e Tecnologia de Materiais Universidade Católica de Petrópolis (UCP), Petrópolis/RJ, Brasil. 15-17 out. 2014 3.2.2 – Compressão do Menisco As equações que regem a compressão uniforme de um corpo são: P = ∫At σ dA K = (At E) / L δ = ( P.L ) / (At E) (9) (10) (11) Onde: At = área total do sistema;σ= tensão aplicada por area; P= força de compressão aplicada no sistema;δ= deformação linear (deslocamento) do sistema apos ação da tensão compressiva;K= rigidez total do sistema;E= módulo de elasticidade do material;L=tamanho final do corpo após deformação; Para os parâmetros referentes a cada área em particular, as equações de regimento locais são modificadas para atender às condições de cada mola considerada. Assim, as forças locais atuantes no corpo podem ser descritas pelas equações: Fi = (Ki / ∑ Kj) Ftibia , i dado, j= 1, n Fi = Ki δ i (12) (13) Onde: n=número total de molas;i= índice referente à mola em estudo;Ki=coeficiente de rigidez local para cada mola;Ftibia = força atuante (descontados a força peso atuante das pernas e pés);Fi = força atuante em cada mola ;δ i= deformação linear sofrida para cada parte ou mola inserida no menisco. 3.2.3 – Flexão Os meniscos, por estarem ancorados à tíbia, se movimentam em conjunto com esta, descrevendo movimentos de translação e rotação. Considera-se agora um ângulo θ de rotação do sistema, cada mola sofre um abaixamento, dado por: δj = Xj. θ Mo = ∑ (Fj Xj) = ∑ (Kj δj) Xj = ∑ (Kj Xj2) θ (14) (15) Onde: Mo = momento fletor;δ j= deformação linear sofrida por cada mola devido à rotação do conjunto;Xi = posição (braço de alavanca) de cada mola com relação ao centro de rotação. Então, para o ângulo de abaixamento total do sistema pode ser calculado: θ = Mo / (∑Kj Xj2) Para a força atuante em cada mola de uma área P, durante a rotação, tem-se: δp = Xp θ Fp = Kp Xp θ (16) (17) (18) Onde: δP = deformação local do sistema;Fp = força local atuante no sistema;Kp = Rigidez da mola considerada;Xp = posição da mola com relação ao centro de rotação. Logo, a equação para a força atuante por mola é: FP = [(Kp.Xp ) / (∑Kj Xj2)] Mo (19) XVII Encontro de Modelagem Computacional V Encontro de Ciência e Tecnologia de Materiais Universidade Católica de Petrópolis (UCP), Petrópolis/RJ, Brasil. 15-17 out. 2014 As equações que regem a translação são: ∑ Ki δi = (δi) ∑ Ki = F Sendo Ftibia a força atuante no sistema. Logo, para cada área Aj, em questão: Fj Kj δ = [Kj / ∑Ki] .Ftibia (20) (21) 3.2.4 – Compressão e Flexão Combinadas Uma vez que o modelo adotado no presente trabalho é linear, a ação da força de compressão e do momento aplicadas simultaneamente no menisco é dada pela soma das expressões desenvolvidas anteriormente. 3.3- Consideraçoes para o Estudo de Caso: Para cada caso ( posição) analisado, considerou-se que:. a)Cada elemento da articulação possui um relevo ósseo característico, o que influi tanto na dinâmica de movimentação da articulação, quanto nos graus de liberdade e magnitude e tipo de tensões atuantes durante o exercício de agachamento estático. b)O grau de liberdade da articulação em questão varia entre 179º a 42º de posição em relação à base do calcanhar (visto que os pés se encontram paralelos ao eixo x). Foram escolhidos quatro valores de angulação cujas forças se apresentam significativas em relação aos ângulos intermediários entre estes. c)O peso e as medidas antropométricas para cada segmento não sofrem variação pela mudança de posição a cada posição. A força atuante na articulação, exceto para a posição articular correspondente à 180º de flexão articular, será corpo, a força dos segmentos que atuam na articulação (peso dos seguimentos localizados acima da articulação em questão) de acordo com a nova posição assumida pelo corpo . d)Atuando também no sistema para posições articulares abaixo de 180º, encontramos a força da musculatura do quadríceps, que poderá variar ate 6,51 vezes o peso corporal para seu valor máximo, valor este que é usado ao longo de todo o trabalho, independente da angulação imposta à articulação, sendo constante para todas as posições. Para todos os casos consideram-se as forças em valores máximos atuando sobre o corpo do menisco e elementos envolvidos. e)A localização do centro de massa varia conforme a posição e movimento realizado pelo indivíduo, resultando em uma equação de regência diferente para cada angulação da articulação do joelho, pois, para manter o corpo em equilíbrio, mudamos a posição da parte superior deste em relação ao eixo cartesiano de referência. As forças calculadas devem respeitar sempre as condições de equilíbrio de forças e momentos em relação ao corpo e sua posição. f)A área total (At) considerada após mapeamento, varia a cada posição assumida pela articulação durante o movimento, correspondendo ao somatório das áreas referentes ao corpo sob ação de força compressiva PS(peso dos segmentos envolvidos) . XVII Encontro de Modelagem Computacional V Encontro de Ciência e Tecnologia de Materiais Universidade Católica de Petrópolis (UCP), Petrópolis/RJ, Brasil. 15-17 out. 2014 4– Comparação dos resultados 4.1 - Comportamento do corpo em relação à tensão e deformação para cada posição articular após aplicação de força: Independente da posição em que a articulação encontra-se flexionada, o corpo em questão terá o mesmo comportamento no que diz respeito à curva tensão x deformação. Os gráficos demonstram que os maiores picos de tensão estão no final da execução do exercício, em qualquer das posições analisadas, sendo esta fase considerada crítica. No gráfico comparativo entre as relações tensão/deformação para cada posição, tem-se: Fig.3 - Analise gráfica comparativa geral para as tensões atuantes no corpo meniscal No inicio do movimento, a este grau de flexão articular, a tensão sofre pequenos picos relativos ao final dos movimentos rotação e translação. O abaixamento de maior grau no menisco lateral decorre da tensão gerada pela acomodação óssea de encaixe do fêmur na estrutura/posição. 4.2 - Comportamento do Corpo em Relação à Rigidez e Deformação para cada Posição Articular após Aplicação de Força: Em relação à rigidez, observa-se um maior valor no primeiro terço de movimento, visto que este se reinicia partindo de uma posição anterior e a parte em questão refere-se apenas à deformação por compressão. A rigidez a 90º assume o maior valor ao inicio do movimento de rotação e translação tibial, o que se torna fator facilitador para estes movimentos. A curva decresce durante a translação, ocasionado pelo incremento de tensão durante a acomodação anatômica da estrutura, decaindo gradativamente ate o final do movimento até ser limitado pelo corpo da patela, com o decréscimo até o final da sua acomodação completa. As demais posições apresentam o mesmo comportamento, decrescendo ate o final do movimento, rigidez também tornou- se quase uniforme após a compressão, uma vez que a rotação tibial e mínima e apenas para fins de acomodação anatômica e não há a translação do sistema. XVII Encontro de Modelagem Computacional V Encontro de Ciência e Tecnologia de Materiais Universidade Católica de Petrópolis (UCP), Petrópolis/RJ, Brasil. 15-17 out. 2014 Fig.4 - Analise gráfica comparativa geral para a rigidez atuantes no corpo meniscal Os valores de tensões, deformações e rigidez estimados assumem como valores máximos e mínimos para cada posição: Tabela 4-Valores máximos e mínimos obtidos para as posições articulares 180º, 135º,90º e As simulações apresentadas nas figuras abaixo demostram os dados obtidos pela tabela 4 : Posição Tensão (Mpa) Deformação (%) Rigidez (N/mm) σmax σmin δmax δmin Kmax Kmin 180º 0 (-5,38).107 (0,95).10-11 (0,01).10-11 (9,8).104 0 135º 0 (-5,70).107 (0,18).10-12 (1,66).10-12 (2,32).104 0 90º 0 (-6,62).107 (1,25).10-11 (0,1).10-12 (2,66).104 0 -12 4 0 45º 0 (-0,5).10 7 (3,5).10 -11 (0,4).10 (1,61).10 As simulações para cada caso, em relação à rigidez e tensão encontram-se nas figuras 5, 6, 7 e 8: XVII Encontro de Modelagem Computacional V Encontro de Ciência e Tecnologia de Materiais Universidade Católica de Petrópolis (UCP), Petrópolis/RJ, Brasil. 15-17 out. 2014 Figura 5– Simulações computacionais para a rigidez e tensão para a posição 180º. Figura 6– Simulações computacionais para a rigidez e tensão para a posição 135º XVII Encontro de Modelagem Computacional V Encontro de Ciência e Tecnologia de Materiais Universidade Católica de Petrópolis (UCP), Petrópolis/RJ, Brasil. 15-17 out. 2014 . Figura 7– Simulações computacionais para a rigidez e tensão para a posição 90º. Figura 8– Simulações computacionais para a rigidez e tensão para a posição 45º. XVII Encontro de Modelagem Computacional V Encontro de Ciência e Tecnologia de Materiais Universidade Católica de Petrópolis (UCP), Petrópolis/RJ, Brasil. 15-17 out. 2014 5 – CONCLUSÕES De acordo com a observação das forças atuantes, o presente estudo resultou em um conjunto de conceitos e resultados, objetivando o esclarecimento sobre o comportamento do corpo meniscal sob ação de uma força compressiva.Num panorama geral, observa-se que a posição articular influi diretamente na tensão e na deformação do corpo meniscal, enquanto o tipo de movimentação sofrida pelo dado corpo dentro da cápsula articular influi inversamente na rigidez do material em questão, levando-se em conta os valores relativos para cada mola inserida no sistema. Para os casos específicos do estudo, conclui-se também que : a)No que diz respeito ao comportamento do tecido, conclui-se que este possui um comportamento viscoelástico, com acumulo de carga mínima, porem presente, a cada ciclo de compressão e descompressão imposto pelos movimentos inerentes à articulação em questão, como mostram os mapas te tensão superficial nas figura 5, 6, 7 e 8. b)Para a articulação tibiofemoral, podemos observar que a estrutura em questão está sujeita a forças compressivas e cisalhantes, sendo estas diretamente relacionadas à mudanças no grau de liberdade articular. Os meniscos, como parte atuante nessa articulação, dissipam e distribuem as cargas compressivas durante a movimentação da articulação e movimentação dos elementos que a compõe. c)As áreas físicas onde as forças atuam no corpo meniscal estão diretamente ligadas à topografia anatômica das estruturas envolvidas ao grau de liberdade que esta apresenta, alem das direções e tipos de forças atuantes na articulação em questão. Por sua vez, a rigidez do corpo meniscal sofre influência direta do movimento relativo entre os componentes ósseos da articulação tibiofemoral (fêmur e tíbia), diminuindo em valores relativos às regiões onde o material recebe tensão compressiva. As deformações locais produzem forças compressivas também nas áreas adjacentes aos pontos de aplicação de tensão, sendo diferentes à cada ponto ou mola para cada posição articular. 6-Referências : 5.1-Obras Consultadas: [1] FLOYD, R.T. Manual de Cinesiologia Estrutural. Editora Manole,16ª edição.Barueri,SP:2008. [2] HALL, Susan J.. Biomecânica Básica . Editora Manole, 5ª Edição. São Paulo-SP; 1999. [3] HAMILL ,J.; KNUTZEN K. M.Bases biomecânicas do movimento humano .Editora Manole.1ª Edição. São Paulo SP:1999. [4] MACEDO;T.A.;2014. Analise de Tensões Atuantes nos Meniscos via Métodos de Rigidez. Dissertação de Mestrado. Volta Redonda: UFF. [5]PARASKI, N.V., 2012. Análise Estática Não Linear de Pórticos Planos via Matlab. Dissertação de Mestrado. Volta Redonda: UFF. [6] RASCH, P. J.;Burke,R.K..Cinesiologia e Anatomia Aplicada. Editora:Guanabara Koogan,5ª edição,Rio de Janeiro-Rj: 1997. [8]ROCHA,P. E. C. Medidas e Avaliação em Ciências do Esporte. Editora Sprint-6ª EdiçãoRio de Janeiro-RJ:2004. 5.2-Artigos Consultados : [9] PELLIZZARO C.O., BERNARDES C. & LOSS J.F. Análise da Força de Cisalhamento na Articulação Tibiofemoral Durante Exercício de Extensão de Joelho .Laboratório de Pesquisa do Exercício, Universidade Federal do Rio Grande do Sul. XVII Encontro de Modelagem Computacional V Encontro de Ciência e Tecnologia de Materiais Universidade Católica de Petrópolis (UCP), Petrópolis/RJ, Brasil. 15-17 out. 2014 [10] ESCAMILLA R.F, FLEISING G., BARRENTINE S.W., WILK K.E, ANDREWS Jr. Biomechanics of the Knee During Closed Kinectic Chain and open Kinectic Chain Exercise., Medicine and Science Sport and Exercise. (30):556-569, 1998. [11] BAUMANN, W.. Procedimentos para determinar as forças internas na biomecânica do ser humano - aspectos da carga e sobrecarga nas extremidades inferiores. In: David, A.C.; Fonseca, J.C.P., (ed) VI Congresso Brasileiro de Biomecânica, Brasília, DF, 1995. [12] HIRATA, R. P. Analise da Carga Mecânica no Joelho durante o Agachamento. Dissertação de Mestrado; Universidade de São Paulo. São Paulo,2006.
Download