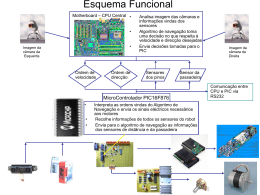
SISTEMA BASEADO EM SOFTWARE LIVRE PARA AUTOMAÇÃO DE SUBESTAÇÕES UTILIZANDO REDES DE SENSORES INTELIGENTES P. S. Sausen, M. A. Spohn, A. C. Oliveira F. Salvadori*, M. de Campos, E. L. Padoin e R. Strieder Universidade Federal de Campina Grande - UFCG Universidade Regional do Noroeste do Estado do Rio Grande do Sul - UNIJUÍ Brasil RESUMO Neste trabalho é apresentado um sistema para automação de subestações de energia elétrica. Para o desenvolvimento deste sistema fez-se uso dos conceitos de Módulos de Sensores Inteligentes (MSInt) estruturados numa Rede de Sensores Sem Fio (RSSF) e em um conjunto de Unidades Remotas de Aquisição de Dados (URADs). A comunicação da RSSF e das URADs com o Controlador Supervisório (CS) pode ser realizada via rádio (Wi-Fi), RS232, RS485 ou através de redes com infraestrutura cabeada (e.g., ethernet). Todas as rotinas em software implementadas para os processos de aquisição, tratamento das grandezas adquiridas, transmissão e apresentação dos dados (Interface Homem Máquina – IHM) foram desenvolvidas utilizando ferramentas de software livre e com código aberto. Esta estrutura apresenta características que, entre outras, mostraram-se interessantes: mobilidade, robustez, versatilidade, confiabilidade. PALAVRAS CHAVE Sensor Inteligente, Padrão IEEE 1451, Redes de Sensores , Controle Supervisório. *Departamento de Tecnologia (DeTec) – Grupo de Automação Industrial e Controle – GAIC Universidade Regional do Noroeste do Estado do Rio Grande do Sul – Unijuí Rua do Comércio, 3000 – Bairro Universitário – CEP 98.7000-000 – Ijuí – RS - Brasil. Introdução A automação de processos sempre esteve intimamente ligada a Instrumentação e Controle. Usualmente, a estratégia convencional utilizada para a aquisição de grandezas no controle de um processo é a de alocar sensores próximos à fonte da grandeza de interesse. Os dados coletados pelos sensores são então transmitidos para o local de processamento através de uma estrutura cabeada de comunicação de dados. Com a evolução da tecnologia de sensores e das redes de comunicação, surge um novo conceito através da introdução do uso dos sensores inteligentes que, agrupados, formam as Redes de Sensores Sem Fio (RSSF). Estas permitem o processamento das grandezas adquiridas próximas ao local de aquisição, transmitindo os resultados através do uso de sinais de rádio e, conseqüentemente, eliminando a necessidade de cabeamento e dos problemas apresentados em decorrência da utilização desta solução, como por exemplo, alto custo de instalação e manutenção, além de possibilitar sua implementação em plantas já existentes. Em decorrência do uso dessa nova estratégia de aquisição, onde os dados são pré-processados localmente, otimiza-se o uso do canal de transmissão, além de permitir gerar informações mais representativas dos dados coletados. Pode-se, por exemplo, enviar o valor RMS ou médio de uma grandeza ao invés de todos os valores coletados. Os sistemas mais recentes de automação de subestações utilizam meios de comunicação baseados em fibra ótica e, na sua maioria, baseados em plataformas proprietárias (geralmente Microsoft Windows®). Entre os sistemas proprietários mais conhecidos estão o da ABB® (Asea Brown Boveri) que é modular em hardware e software denominado Substation Monitoring System SMS530®. Focado em automação de subestações, a Siemens® possui o SICAM® uma evolução do sistema SIMATIC®. Considerando os sistemas já instalados, muitos utilizam comunicação serial padrões RS232 e RS485, que utilizam meios cabeados (com par trançado) para tráfego de dados e comandos. A utilização de sistemas proprietários (hardware e software) também foi analisada por pesquisadores. Em [1], apresenta-se um sistema de monitoramento que utiliza como padrão de comunicação a porta serial RS232 e fibra ótica. Desenvolvido sobre a plataforma Windows NT® a comunicação da subestação com a central de controle é realizada através de uma linha discada. Em [2], apresenta-se um esquema de controle de segurança para uma subestação de 440kV aplicado à correção de distúrbios. O esquema é baseado em Controladores Lógicos Programáveis (CLPs), os quais possuem um alto custo de implementação principalmente quando são utilizadas entradas analógicas, as quais normalmente são multiplexadas. Essas soluções são baseadas em sistemas dedicados e soluções proprietárias, que apresentam alto custo de instalação e manutenção. Isto torna as alterações e adequações do projeto/sistema uma tarefa trabalhosa e de alto custo financeiro, sobretudo devido ao cabeamento utilizado pelos sensores e pela falta de flexibilidade dos sistemas proprietários. No que se refere ao software implementado em sistemas de controle supervisório, algumas alternativas são apresentadas em [3], [4] e [5]. Uma nova abordagem para transmissão de dados em sistemas de automação é apresentada em [6], onde é utilizado o conceito de transmissão sem fio (wireless) em conjunto com a adoção do conceito de software livre tanto em nível da aplicação como em Sistema Operacional (SO). Este trabalho estende a solução apresentada em [6] incorporando ao sistema módulos sensores inteligentes de baixo custo. O sistema é desenvolvido para automação de subestação de energia elétrica utilizando o conceito de sensores inteligentes estruturados numa RSSF [7]. O sistema de supervisão foi totalmente desenvolvido sobre plataforma de software livre. Esta alternativa une, em um mesmo sistema de supervisão, os conceitos dos sensores inteligentes (i.e., mobilidade) com o conceito de software livre (i.e., baixo custo). 2 Descrição do Sistema Este sistema é resultado de dois projetos de P&D desenvolvidos em parceria com a CEEE-D/RS no âmbito dos fundos setoriais. O primeiro deles, denominado Sistema para Automação de Subestações, define as tecnologias adequadas, ou a adequar, para a aquisição dos sinais de interesse, processamento e transmissão dos sinais de maneira a implementar um sistema de aquisição de dados e controle supervisório, fundamentado basicamente em termos de custo e confiabilidade. Além disso, desenvolver procedimentos, ferramentas de software e equipamentos que tornem mais barato o custo de atualização das subestações já existentes, sem perda de confiabilidade, com tecnologia aberta e que possibilite a inclusão de outros sistemas. Deste projeto resultou o sistema apresentado em [6] e que passou, nos anos subseqüentes, por melhorias. O segundo projeto, denominado Projeto e implementação de sensores inteligentes, implementa um módulo de transdução inteligente, totalmente compatível com o Padrão IEEE 1451.2, em um microcontrolador dedicado de baixo custo. Portanto, destes dois projetos resulta o sistema ora apresentado. Entre as características do sistema podemos citar algumas que o diferenciam dos demais sistemas de automação de subestações: (a) facilidade de implementação de sistemas microprocessados (microcontroladores e/ou DSPs); (b) utilização de um sistema operacional, e plataforma de desenvolvimento não proprietária e livre de licença; (c) baixo custo de implementação (hardware e software); (d) portabilidade e mobilidade; (e) facilidade de implementação de múltiplas rotas de comunicação (i.e., segurança); e, (f) possibilidade de utilização de estruturas de rede já existentes. O sistema foi dividido em três subsistemas conforme apresentado na Figura 1: • Subsistema de Aquisição de Dados; • Subsistema Servidor Remoto (SR); • Subsistema Controlador Supervisório (CS). Figura 1 – Arquitetura do Sistema. 3 2.1. Subsistema de Aquisição de Dados Esse subsistema é formado pelos dispositivos responsáveis pela aquisição e pré-processamento dos dados coletados. Dois dispositivos são utilizados para realizar essas funções. O primeiro deles é a Unidade Remota de Aquisição de Dados (URAD) e o segundo dispositivo é o Módulo Sensor Inteligente (MSInt). A URAD (ver Figuras 2 e 3) é uma unidade de aquisição estática, projetada inicialmente para aquisição de três tensões e três correntes da subestação de energia. A URAD pode se comunicar com o Servidor Remoto (SR) via RS 232, RS 485 ou via rádio. No caso da utilização da RS 485 é possibilitada a conexão de múltiplas URADs para cada SR. Neste momento o sistema opera ponto-aponto utilizando apenas RS232. A Figura 3 apresenta o diagrama de blocos da URAD. Os transdutores de tensão e corrente são responsáveis pela aquisição das grandezas elétricas. Os sinais de tensão e corrente no secundário dos transformadores de medição são acessíveis em níveis muito menores do que no primário, mas, embora isto facilite na medição, transientes na rede ainda são transmitidos ao secundário. Estes transientes podem facilmente destruir circuitos que trabalham em baixas tensões e correntes, como os circuitos de controle da URAD. De modo a evitar estes transientes, são utilizados transdutores de tensão LV20-P e corrente LA25-NP da LEM® (sensor de efeito Hall). Figura 2 – Unidade Remota de Aquisição de Dados (URAD): Sensores de Tensão (LV20) e Corrente (LA20); Conector barramento de dados; Conector da alimentação; Saída RS 232; Saída RS 485; DSP TMS320F2812; e, Transceiver TRW 2.4G®. A URAD é controlada através de um Processador Digital de Sinal (DSP), modelo TMS320F2812. Com 64 KB de memória para programas e 64 KB para dados. Opera na freqüência de 150 MHz e utiliza linguagem C/C++ na sua programação. O conversor Analógico-Digital (A/D) é de 12 bits e opera na freqüência de 25 Mhz com tempo de conversão de 80 ns. Os 16 canais de entrada (ou os 2 canais multiplexados de 8 entradas) podem ser configurados em modo seqüencial ou simultâneo. A URAD além de possuir interface serial de comunicação (RS232 ou RS485) para comunicação com o Servidor Remoto, também possui um módulo de comunicação por RF (modelo TRW 2.4G) utilizado para realizar a comunicação com os dispositivos MSInt Gateway. 4 Figura 3 – Representação da URAD em diagrama de blocos. O segundo dispositivo, o MSInt, foi desenvolvido a partir de componentes de baixo custo. Utiliza microcontrolador PIC18F4520 com encapsulamento SMD do tipo TQFP de 44 pinos e um transceiver TRW 2.4G para se comunicar, via RF, com os demais MSInt. Desenvolvido pela Laipac®, utiliza o nRF2401 da Nordic Semiconductor™ e modulação GFSK para a transmissão dos dados a uma taxa no LINK RF que pode chegar a 1 Mbps. Figura 4 – MSInt Sensor. Foram desenvolvidas duas estruturas de MSInt: MSInt Sensor e o MSInt Gateway (Figuras 4 e 5, respectivamente). A primeira é responsável pela aquisição, processamento e transmissão das grandezas adquiridas. Por padrão, os MSInt Sensor vem equipados com um sensor de temperatura, porém, novos sensores podem ser adicionados conforme a necessidade da aplicação através dos conectores de uma das 12 entradas digitais ou 12 analógicas. O MSInt Sensor possui fonte de alimentação externa composta por quatro pilhas recarregáveis do tipo AAA que propicia mobilidade e autonomia ao nó sensor. A segunda categoria, o MSInt Gateway, é responsável pela comunicação dos MSInt e da URAD com o CS via SR, ou diretamente com o CS bastando para isso conectá-lo utilizando uma das portas de comunicação (RS 232 ou USB) (ver Figura 5). O software de comunicação foi desenvolvido em C++ utilizando programação orientada a objeto. Fig. 5 – MSInt Gateway (USB/RS232). 5 Subsistema Servidor Remoto – SR Para desempenhar as funções de SR, utiliza-se uma Soekris modelo Net4521 (ver Figura 6). Apropriada para trabalhar em lugares inóspitos sob severas condições de funcionamento, tem como principais características: processador AMD 133 MHz, 64 MB SDRAM, socket CompactFlash tipo I/II, duas interfaces FastEthernet, uma portal serial DB9, dois slots PC-Card/Cardbus, e alimentação via fonte externa de 12V DC. Figura 6 – Servidor Remoto (SR): (1) – Placa adaptadora PCMCIA Orinoco; (2) – Conexão SR com a rede Ethernet; (3) – Conexão SR com a URAD ou com o MSInt Gateway; (4) – Alimentação do SR e (5) – Cartão de memória. O SO escolhido foi o Voyage Linux, uma distribuição Linux baseada em Debian e customizada para trabalhar em plataformas voltadas para sistemas embarcados. A escolha por essa distribuição deve-se ao fato de sua fácil instalação e pelo bom desempenho no hardware utilizado pelo projeto. A comunicação entre o subsistema de Aquisição de Dados e o subsistema CS é função do SR, sendo realizada por dois módulos, desenvolvidos em linguagem C: URADServer e o URADClient. O módulo URADServer permanece residente nos SRs recebendo dados originários da(s) URAD(s) e pela RSSF (ver Figura 1). A partir dos dados recebidos, o URADServer realiza ações de préprocessamento nos dados antes de transmiti-los para o CS. Essas ações são referentes ao cálculo, em RMS, das potências aparente, ativa e reativa, e o fator de potência. O módulo URADServer realiza a compactação dos dados e coloca-os em formato aceito pelo protocolo MODBUS. Essa última funcionalidade permite que o sistema de aquisição de dados comunique-se com sistemas que utilizam o padrão MODBUS (sistemas SCADA). Está em desenvolvimento o módulo de criptografia dos dados transmitidos pelo módulo URADServer, objetivando-se maior segurança ao sistema. O módulo URADClient permanece residente no CS. É responsável pela recepção dos dados enviados pelo módulo(s) URADServer(s), descompactação e disponibilização para o módulo EletroPlot. Como mencionado anteriormente, existe a possibilidade do módulo URADServer transmitir no padrão MODBUS, neste caso o módulo URADClient disponibiliza um arquivo texto que pode ser lido por qualquer sistema que utiliza padrão MODBUS. O CS pode ser qualquer computador que possuir uma conexão com a Internet. No que se refere à rede o SR desempenha o papel de gateway. Para desempenhar esta função foram incorporadas as seguintes 6 opções de comunicação: porta serial (RS232/RS485), RF ou USB com possibilidades de entrada convertendo para TCP/IP (sem fio e cabeada) utilizando ou não MODBUS (i.e., protocolo de comunicação utilizado na automação industrial). Futuramente, pretende-se incorporar um modulo GPRS (General Packet Radio Service) para facilitar a comunicação utilizando a estrutura GSM de telefonia celular, em lugares inóspitos e de difícil acesso. Esse conjunto de alternativas para transmissão dos dados, disponibilizada pelo SR, permite agregar segurança ao sistema de automação. Qualquer falha numa forma de comunicação, imediatamente outro módulo de comunicação pode ser ativado em tempo de execução. Subsistema Controlador Supervisório - CS O sistema pode ser gerenciado por qualquer computador que possuir o módulo supervisório (IHM) instalado e tiver acesso a Internet. A IHM foi desenvolvida, inicialmente, para apresentar os dados coletados em tempo real, restringindo-se em ser a Interface Gráfica para o Usuário final (Graphical User Interface (GUI)) e, em uma versão futura, adicionar-se-á à parte de atuação (controle) do sistema. O módulo supervisório denominado EletroPlot foi desenvolvido em linguagem C++ sobre a plataforma Linux utilizando objetos da biblioteca gráfica QWT v. 5.0. A Figura 7 apresenta as duas possibilidades de visualização dos dados, através de gráficos (à esquerda) ou de tabelas (à direita). A visualização dos dados pode ser a partir de dados coletados em tempo real ou armazenados em arquivos. Na opção on-line os dados são lidos diretamente do subsistema de Aquisição de Dados numa periodicidade definida pelo usuário e apresentados na forma de gráficos, tabelas ou de ambos a partir de parâmetros definidos pelo usuário. A versão em desenvolvimento do EletroPlot integra o banco de dados MySQL. Nesta opção, o banco de dados é alimentado pelos dados coletados do sistema de medições on-line a partir de parâmetros estipulados pelo usuário. Com esta estrutura é possível, além da opção de visualização de intervalos determinados, utilizar os dados armazenados para definição de estratégias de manutenção preditiva e implementação de sistemas de diagnóstico e detecção de falhas. Figura 7 – Módulo EletroPlot: gráficos (esquerda) e tabelas (direita). Conclusão Este trabalho apresenta os resultados obtidos no desenvolvimento de uma plataforma aplicada à automação de subestações. O sistema apresenta como grandes diferenciais a utilização do conceito de Módulos de Sensores Inteligentes e o fato de todas as rotinas de software (aquisição, processamento, 7 transmissão e IHM) terem sido desenvolvidas utilizando ferramentas de software livre e de código aberto. Estes diferenciais conferem ao sistema: mobilidade, robustez, versatilidade, confiabilidade e baixo custo (implantação e manutenção). Os testes preliminares realizados demonstraram que, no que se refere às URADS e ao monitoramento dos sinais de interesse, em um primeiro caso (i.e., correntes e tensões) o sistema atende aos requisitos demandados pela Resolução 505 de 2001 da ANEEL (i.e., um número mínimo de 16 amostras/ciclo, 12 bits de conversão e 1% de precisão). Em relação ao MSInt, até o presente momento, sua configuração básica de conversão é de 10 bits e a capacidade de processamento de 8 bits, o que não permite sua utilização para o monitoramento de tensões e correntes, mas apenas para grandezas que tenham alta constante de tempo (e.g., temperatura e umidade). Novos testes estão sendo desenvolvidos buscando determinar pontos de estrangulamento do sistema proposto, tais como: (i) distância para transmissão sem fio; (ii) perdas de pacotes; (iii) interferência eletromagnética; e, (iv) máxima freqüência de transmissão (URADs e MSInt). A principal contribuição deste trabalho é mostrar a possibilidade de desenvolver um sistema completo utilizando componentes de baixo custo e software livre de código aberto. AGRADECIMENTOS Os autores agradecem o apoio financeiro fornecido pela Companhia Estadual de Energia Elétrica do Rio Grande do Sul (CEEE-RS). BIBLIOGRAFIA [1] G. L. d Castro Neto, A.G. Kanashiro, C.V.S. Malagodi, “Desenvolvimento e Implantação de Sistema de Monitoramento de Subestações”, Eletricidade Moderna, pp. 286 a 297, Abril, 2000. [2] J.A.C. Moreira, A.R.C.D. Carvalho, P.C. Almeida, A. C. Pereira, “Bauru Security Scheme”, IEEE Porto Power Tech Conference, Porto, Portugal, 2001. Control [3] D. Li, Y. Serizawa and M. Kiuchi, “Concept Design For A Web-Based Supervisory Control And Data-Acquisition (SCADA) System”, Transmission And Distribution Conference And Exhibition 2002: Asia Pacific. IEEE/PES volume 1, 6-10 Oct. 2002 Page(s):32 - 36 vol.1. [4] D. Zimmer and D. Rhodes, “Human Machine Interfaces”, Industry Applications Magazine, IEEE Volume 12, Issue 2, March-April 2006 Page(s):29 – 35 [5] D. Gracek, O. Geynisman, D. Proudfoot, K. Minnik, “Migrating From Scada To Automation”, Transmission And Distribution Conference And Exposition, 2001 IEEE/PES, Volume 1, 28 Oct.-2 Nov. 2001 Page(s):343 - 348 vol.1. [6] F. Salvadori, P.S. Sausen, L.V. Hartmann, M. de Campos, E.L. Padoin and G.V. Leandro, “Acquisition And Transmission Data Monitoring System Applied To Energy Substation”, Industrial Informatics, 2003. INDIN 2003. Proceedings. IEEE International Conference on 21-24 Aug. 2003 Page(s):60 – 64, Banff, Alberta, Canada. [7] E. H. CALLAWAY, Wireless Sensor Networks: Architectures And Protocols. CRC Press LLC, New York, 2003. 8
Baixar