ANÁLISE DINÂMICA DE UM SISTEMA ROTOR-MANCAL UTILIZANDO LIGAS COM
MEMÓRIA DE FORMA
Leandro da Costa Silva
Dissertação
de
Mestrado
apresentada
ao
Programa de Pós-graduação em Engenharia
Mecânica, COPPE, da Universidade Federal do
Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Mestre em
Engenharia Mecânica.
Orientadores: Marcelo Amorim Savi
Alberto Paiva
Rio de Janeiro
Junho de 2011
ANÁLISE DINÂMICA DE UM SISTEMA ROTOR-MANCAL UTILIZANDO LIGAS COM
MEMÓRIA DE FORMA
Leandro da Costa Silva
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO
LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE)
DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM
CIÊNCIAS EM ENGENHARIA MECÂNICA.
Examinada por:
RIO DE JANEIRO, RJ - BRASIL
JUNHO DE 2011
Silva, Leandro da Costa
Análise Dinâmica de um Sistema Rotor-Mancal
utilizando Ligas com Memória de Forma/ Leandro da
Costa Silva. – Rio de Janeiro: UFRJ/COPPE, 2011.
XII, 62 p.: il.; 29,7 cm.
Orientador: Marcelo Amorim Savi
Alberto Paiva
Dissertação (mestrado) – UFRJ/ COPPE/ Programa
de Engenharia Mecânica, 2011.
Referências Bibliográficas: p. 57-62.
1. Análise dinâmica não-linear. 2. Materiais com
memória de forma. 3. Caos. I. Savi, Marcelo Amorim et
al. II. Universidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Mecânica. III. Título.
iii
À Juliene e Bárbara, meus grandes amores.
iv
Agradecimentos
Aos meus orientadores Marcelo Amorim Savi e Alberto Paiva pela confiança e
paciência. Estas duas pessoas vivem a dinâmica não linear de uma maneira tão
intensa que contagia todos os alunos em sua volta.
Aos meus familiares que não me abandonaram nunca, mesmo quando o mau
humor era insuportável, permaneceram do meu lado e me dando forças para
continuar.
Agradeço especialmente à Juliene pelo amor e companheirismo ao longo de todo
este tempo e à sua interminável paciência e bondade, mesmo nos dias mais
difíceis de dúvida e apreensão. Obrigado por estar ao meu lado e ter me dado o
maior presente da minha vida.
E obrigado a minha maior e melhor criação, pela alegria que transmite e que seu
bom humor continue contagiando todos à sua volta. Bárbara eu te amo.
v
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
ANÁLISE DINÂMICA DE UM SISTEMA ROTOR-MANCAL UTILIZANDO LIGAS COM
MEMORIA DE FORMA
Leandro da Costa Silva
Junho/2011
Orientadores: Marcelo Amorim Savi
Alberto Paiva
Programa: Engenharia Mecânica
A aplicação de ligas com memória de forma tem se mostrado uma alternativa
promissora no controle de vibração de máquinas rotativas e estruturas, principalmente
devido ao seu comportamento histerético não-linear que confere uma característica
adaptativa às estruturas inteligentes que empregam esta classe de materiais. As nãolinearidades apresentadas pelos sistemas dinâmicos com memória de forma podem
produzir respostas muito complexas ou irregulares e, muitas vezes, caóticas que, na
área de Engenharia Mecânica, são por vezes indesejadas. Desta forma, o estudo da
dinâmica de sistemas não-lineares tem motivado pesquisas em diferentes áreas do
conhecimento. Dentro deste contexto, o objetivo deste trabalho é modelar e simular
numericamente o comportamento de um sistema rotor-mancal, utilizando técnicas de
análise não-linear. Os resultados apresentados mostram que a utilização de elementos
com memória de forma no mancal modifica drasticamente a dinâmica do conjunto,
propiciando a possibilidade de atuação/controle sobre o sistema.
vi
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
DYNAMIC ANALISYS OF A ROTOR-BEARING SYSTEM USING SHAPE MEMORY
ALLOYS
Leandro da Costa Silva
June/2011
Advisors: Marcelo Amorim Savi
Alberto Paiva
Department: Mechanical Engineering
The use of shape memory alloys has become a promising alternative for
vibration control of rotating machinery and structures, mainly due to their nonlinear
hysteretic behavior that propitiates an adaptive characteristic to intelligent structures
employing this class of materials. The nonlinear features presented by the shape
memory dynamical systems may result in a very complex or irregular response,
sometimes even chaotic, which in the Mechanical Engineering field is usually
undesirable. For all these reasons, the study of nonlinear dynamics has been
motivating researchers in different knowledge areas. Within this context, the purpose of
this work is to model and numerically simulate the dynamical behavior a rotor-bearing
system, using nonlinear analysis techniques. The results presented herein show that
the application of shape memory elements to the bearing drastically affects the overall
dynamics, offering the possibility to actuate/control the system.
vii
Sumário
1. Introdução ............................................................................................................... 01
1.1 Ligas com memória de forma............................................................................... 04
1.2 Organização do trabalho ...................................................................................... 05
2. Modelagem matemática .......................................................................................... 07
2.1 Sistema rotor-mancal ........................................................................................ 07
2.2 Sistema rotor-mancal com memória de forma ................................................... 09
2.2.1 Modelo constitutivo..................................................................................... 10
2.2.2 Equações do movimento ............................................................................ 12
2.2.3 Procedimento numérico ............................................................................. 13
3. Verificação do modelo ............................................................................................ 15
3.1 Sistema rotor-mancal unidimensional................................................................ 15
3.2 Sistema rotor-mancal com suporte descontínuo ............................................... 18
3.2.1 Sistema rotor-mancal com suporte elástico ................................................ 18
3.2.2 Sistema rotor-mancal com suporte de SMA ............................................... 20
4. Sistema rotor-mancal com memória de forma......................................................... 23
4.1 Vibração Livre ................................................................................................... 24
4.2 Vibração Forçada .............................................................................................. 29
4.3 Efeito da assimetria tração-compressão ........................................................... 43
4.4 Efeito do amortecimento externo....................................................................... 49
5. Considerações Finais ............................................................................................. 54
6. Referências Bibliográficas....................................................................................... 57
viii
Lista de Figuras
Figura 1 – Modelo físico do sistema rotor-mancal. ........................................................ 8
Figura 2 – Sistema de coordenadas do sistema rotor-mancal....................................... 8
Figura 3 – Modelo físico do sistema rotor-mancal com SMA....................................... 10
Figura 4 – Modelo de um oscilador não-suave com rigidez descontínua. ................... 16
Figura 5 – Espaço de fase e seção de Poincaré para γ = −0,124m . .......................... 17
Figura 6 – Evolução no tempo para (a) deslocamento em x para movimento de período
dois, (b) velocidade em x para movimento de período dois e (c) deslocamento
em x para movimento caótico e (d) deslocamento em y para movimento
caótico. ......................................................................................................... 19
Figura 7 – Órbitas do espaço de fase (a) periódico e (b) caótico. ............................... 20
Figura 8 – Evolução dos parâmetros β n (a) na direção x e (b) na direção y. .............. 21
Figura 9 – Força vs. deslocamento (a) na direção x e (b) na direção y. ...................... 21
Figura 10 – Evolução no tempo para deslocamento e velocidade............................... 21
Figura 11 – Órbitas do espaço de fase (a) periódico e (b) caótico. ............................. 22
Figura 12 - Evolução no tempo do deslocamento (a) direção horizontal e (b) direção
vertical. ......................................................................................................... 25
Figura 13 - Diagrama força x deformação para (a) direção horizontal e (b) direção
vertical. ......................................................................................................... 25
Figura 14 - Órbitas do espaço de fase (a) x × x ' e (b) y × y' . ..................................... 26
Figura 15 - (a) Evolução no tempo do deslocamento na direção horizontal, (b) Detalhe
da evolução no tempo do deslocamento na direção horizontal para
4900 ≤ t (s) ≤ 5000 , (c) Evolução no tempo do deslocamento na direção
vertical e (d) Detalhe da evolução no tempo do deslocamento na direção
vertical para 4900 ≤ t (s) ≤ 5000 . .................................................................. 27
Figura 16 – Diagrama força x deslocamento para (a) direção horizontal e (b) direção
vertical. ......................................................................................................... 28
Figura 17 - Órbitas do espaço de fase (a) x × x ' e (b) y × y' . ..................................... 28
Figura 18 - Evolução no tempo do deslocamento para (a) direção horizontal e (b)
direção vertical. ............................................................................................. 29
Figura 19 – Diagrama força x deslocamento do elemento de SMA para (a) direção
horizontal e (b) direção vertical. .................................................................... 30
Figura 20 - Evolução no tempo do deslocamento para (a) direção horizontal e (b)
direção vertical. ............................................................................................. 30
ix
Figura 21 – Evolução no tempo do deslocamento no período de tempo
4941 ≤ t (s) ≤ 4954 para (a) direção horizontal, (b) direção vertical, Diagrama
força x deslocamento do elemento de SMA para (c) direção horizontal, (d)
direção vertical e Evolução dos betas no tempo para (e) direção horizontal e
(f) direção vertical.......................................................................................... 32
Figura 22 – Órbitas do espaço de fase (a) x × x ′ , (b) y × y' , (c) x × y e (d) R × R ' . .. 34
Figura 23 – Evolução no tempo do deslocamento para (a) direção horizontal e (b)
direção vertical. ............................................................................................. 35
Figura 24 – (a) Evolução no tempo do R e (b) Órbitas do espaço de fase. ................. 36
Figura 25 – Diagrama força x deslocamento para (a) direção horizontal e (b) direção
vertical. ......................................................................................................... 37
Figura 26 – (a) Evolução no tempo para a direção x (b) Órbitas do espaço de fase
para y × y' . ................................................................................................... 38
Figura 27 – Órbitas do espaço de fase e seção de Poincaré para o sistema com
elemento elástico (a) para x × x ' , (b) para x × y , (c) y × y' e (d) x '× y' . ....... 39
Figura 28 – Órbitas do espaço de fase e seção de Poincaré para o sistema com
elemento elástico (a) para x × x ' , (b) para x × y , (c) y × y' e (d) x '× y' . ....... 40
Figura 29 – Evolução no tempo (a) do deslocamento horizontal, (b) da velocidade na
direção horizontal, (c) do deslocamento vertical, (d) da velocidade na direção
vertical, (e) do centro do rotor e (f) da velocidade do centro do rotor............. 41
Figura 30 – Espectro da frequência para (a) direção x do sistema elástico, (b) direção x
do sistema com SMA, (c) direção y do sistema elástico e (d) direção y do
sistema com SMA. ........................................................................................ 42
Figura 31 – Evolução no tempo para deslocamento (a) em x e (b) em y.................... 44
Figura 32 – Evolução no tempo para deslocamento no intervalo 4950 ≤ t (s) ≤ 5000
(a) em x e (b) em y. ....................................................................................... 45
Figura 33 – Diagrama força x deslocamento do elemento de SMA para (a) direção
horizontal e (b) direção vertical. .................................................................... 45
Figura 34 – Evolução no tempo para deslocamento (a) em x e (b) em y..................... 47
Figura 35 – Órbitas do espaço de fase para (a) x × x ' e (b) x × y . ............................. 47
Figura 36 – Órbitas do espaço de fase e seção de Poincaré para (a) x '× y' e (b) y × y' .
...................................................................................................................... 48
Figura 37 – Espectros de frequência para (a) Resposta simétrica na direção x (b)
Resposta assimétrica na direção x, (c) Resposta simétrica na direção y e (d)
Resposta assimétrica na direção y. ............................................................... 49
x
Figura 38 – Evolução no tempo do deslocamento para (a) direção x e (b) direção y. . 50
Figura 39 – Espaço de fase para (a) x × x ' e (b) x × y utilizando c = 0,002 N.s / m . ... 51
Figura 40 – Espaço de fase e seção de Poincaré para (a) y × y' utilizando SMA e
(b) y × y' utilizando elemento elástico utilizando c = 0,002 N.s / m . ................ 51
Figura 41 – Espectro de frequência utilizando c = 0,002 N.s / m para (a) direção x
utilizando elemento elástico e (b) direção x utilizando elemento de SMA. ..... 52
Figura 42 – Evolução no tempo do deslocamento em x utilizando c = 0,05 N.s / m para
(a) direção x considerando regime transiente e (b) direção x considerando
regime permanente. ...................................................................................... 52
Figura 43 – Evolução no tempo do deslocamento em y utilizando c = 0,05 N.s / m para
(a) direção x considerando regime transiente e (b) direção x considerando
regime permanente. ...................................................................................... 53
xi
Lista de tabelas
Tabela 1 – Parâmetros do sistema rotor-mancal unidimensional. ............................... 15
Tabela 2 – Propriedades das SMAs segundo SANTOS & SAVI (2009). ..................... 16
Tabela 3 – Parâmetros do sistema rotor-mancal......................................................... 18
Tabela 4 – Dados geométricos do sistema rotor-mancal. ........................................... 23
Tabela 5 – Propriedades das SMAs............................................................................ 24
Tabela 6 – Parâmetros do sistema rotor-mancal......................................................... 37
Tabela 7 – Parâmetros do sistema rotor-mancal......................................................... 43
Tabela 8 – Propriedades das SMAs com assimetria. .................................................. 43
Tabela 9 – Dados geométricos e estruturais do elemento de SMA. ............................ 46
Tabela 10 – Parâmetros do sistema rotor-mancal....................................................... 46
xii
1. Introdução
Nos últimos anos, a indústria brasileira vem sofrendo uma grande
transformação no seu parque industrial onde a grande maioria das empresas vêm
investindo na modernização de máquinas e equipamentos. Os sistemas mecânicos
rotativos, constituídos basicamente de eixos, rotores e mancais se destacam como um
dos principais equipamentos.
As interações rotor-mancal em máquinas rotativas têm atraído muita atenção
dos pesquisadores desde o famoso trabalho de JEFFCOTT (1919), que propôs um
modelo que, apesar de simples, é capaz de capturar de maneira consistente o
comportamento dinâmico de sistemas deste tipo. O desbalanceamento de máquinas
rotativas pode ser gerado na fase de montagem ou de operação do sistema.
SUDHAKAR
&
SEKHAR
(2011)
fizeram
um
estudo
para
identificar
o
desbalanceamento de um sistema rotor-mancal utilizando duas abordagens distintas:
método da minimização das cargas equivalentes e método da minimização de
vibração. A primeira calculava a diferença entre as cargas estimadas equivalentes e a
carga teórica, enquanto a segunda utilizava um algoritmo “de quadras” para minimizar
a diferença entre as respostas de vibração medida e calculada. Estas forças de
desbalanceamento podem ter consequências indesejadas como a quebra ou a fissura
dos componentes. Mesmo um componente inicialmente bem balanceado tende a se
deteriorar ao longo de sua vida útil. As formas de desbalanceamento são as mais
diversas sendo um dos principais objetivos do controle de vibrações nas máquinas
rotativas evitar que estes desbalanceamentos ocorram.
Dentro deste contexto, um tema de especial relevância diz respeito aos
contatos indesejáveis entre as partes dinâmicas e estacionárias de uma máquina
rotativa. O fenômeno de rubbing, devido ao atrito ou toque entre o rotor e o mancal, é
reconhecido como um dos principais modos de falha nos equipamentos rotativos
(EDWARDS et al.,1999). As respostas decorrentes do impacto entre o rotor e o
mancal foram estudadas em aplicações específicas como nas máquinas a vapor e as
turbinas a gás estudadas por MUSZYNSKA & GOLDMAN (1995) e AL-BEDOOR
(2000).
Os impactos rotor-mancal introduzem não-linearidades no sistema que
resultam em comportamentos complexos que podem variar de movimentos periódicos,
quasi-periódicos, ou caóticos (ZHANG et al., 2002). Os impactos em sistemas rotativos
são tão críticos que diversas alternativas são investigadas para evitar comportamentos
indesejáveis, sendo o controle uma das alternativas mais exploradas na literatura.
1
LUO & LV (2009) estudaram as respostas dos movimentos com impacto de um
oscilador com dois graus de liberdade. A análise considerava um mapa de Poincaré
em três dimensões com as variáveis de estado definidas nos instantes em que há o
impacto. O controle de bifurcações e caos é realizado através de forças externas,
controle de amortecimento e atraso na resposta. Este tipo de controle também foi
estudado por MA et al. (2009) que analisaram um oscilador com dois graus de
liberdade e apresentaram as repostas dinâmicas sob a influência da folga entre o
oscilador e o dispositivo de impacto. Os movimentos caóticos originados do impacto
são controlados pelo uso de forças externas aplicadas através de pulsos periódicos.
ZENG et al. (1999) e YAO et al. (1999) estudaram uma forma de controle utilizando
materiais
inteligentes.
Os
primeiros
criaram
um
modelo
regulador
de
desbalanceamento eletromagnético impedindo o contato entre o rotor e o mancal
através de forças eletromagnéticas que alteram o desbalanceamento gerando uma
espécie de correção no peso das massas excêntricas. O segundo grupo de
pesquisadores estudou o controle de vibrações de um rotor através de um
amortecedor eletro-reológico aplicado a um modelo com seis graus de liberdade.
Dentro deste contexto de controle de vibração através de materiais inteligentes, LEES
(2011) realizou um estudo recente da dinâmica de um rotor sob o efeito de atuador
piezo-elétrico que corrigia o comportamento do rotor.
Outro modo de falha das máquinas rotativas se dá quando o rotor apresenta
determinadas trincas ou fissuras por fadiga. PATEL & DARPE (2008) estudaram a
resposta dinâmica de um sistema rotor-mancal onde o rotor apresentava uma trinca
prévia. Nesse estudo, os autores investigaram as respostas das vibrações no rotor e
os efeitos dinâmicos acarretados pelo desbalanceamento proveniente da rachadura e
do contato entre o rotor e o mancal. WENHUI et al. (2008) fizeram uma análise de
estabilidade de um sistema rotor-mancal com dois rotores desbalanceados e
exploraram diversas respostas, incluindo caóticas, através da análise de diagramas de
bifurcação, expoentes de Lyapunov e mapas de Poincaré.
Para exemplificar a versatilidade do modelo proposto por Jeffcott, SCHWEIZER
& SIEVERT (2009) estudaram as interações dinâmicas de uma turbina automotiva,
modelando-a numericamente como se fosse um rotor-mancal e analisaram as
respostas não-lineares provenientes de desbalanceamentos no rotor. Além disso,
exploraram a influência de diversos parâmetros do sistema como a pressão e a
temperatura do óleo.
LAHA & KAKOTY (2011) apresentaram um estudo do comportamento nãolinear de um sistema composto de um rotor flexível suportado por um mancal
lubrificado a óleo. Este trabalho tratava-se de uma análise de comportamento do
2
sistema com o rotor desbalanceado montado em mancais lubrificados a óleo, onde as
equações do movimento são obtidas através do método de elementos finitos pela
formulação de Timoshenko para vigas e discos. A equação não-linear do filme de óleo
foi calculada pela equação de Reynolds modificada em conjunto com a equação de
Darcy. Foi mostrado que variações de parâmetros como índice de esbeltez,
propriedades dos materiais, massa e permeabilidade do material poroso do mancal
causam efeitos profundos na resposta do sistema.
Ao longo dos anos, a resposta dinâmica de sistemas não-suaves vem sendo
estudada por vários pesquisadores. SAVI et al. (2007) estudaram as respostas
dinâmicas contemplando comportamentos caóticos em um sistema com um grau de
liberdade com um suporte descontínuo elástico. SANTOS & SAVI (2009) e
SITNIKOVA et al. (2010) estudaram o mesmo sistema com um grau de liberdade onde
o suporte do sistema secundário era composto por ligas com memória de forma
(SMAs). Esses trabalhos mostram como a capacidade de dissipação intrínseca das
SMAs pode ser explorada com o objetivo de obter respostas mais bem comportadas
em sistemas com impacto.
WIERCIGROCH et al. (2002) estudaram a dinâmica de um sistema rotormancal modelado a partir de um oscilador com dois graus de liberdade com suportes
descontínuos e elásticos. O sistema físico foi representado por um rotor Jeffcott e o
estudo revelou a riqueza dinâmica do problema, incluindo o caos. SHANG et. al.
(2011) estudaram a resposta global do mesmo sistema rotor-mancal considerando os
efeitos do atrito seco. Neste estudo foi mostrado que o atrito seco gera um giro para
trás no rotor, oposto à direção do movimento. De uma maneira geral, este sistema é
uma versão bidimensional do sistema descontínuo tratado por SAVI et al. (2007).
O presente trabalho apresenta o comportamento dinâmico de um rotor Jeffcott
submetido a impacto, onde o mancal é constituído por elementos com memória de
forma. A motivação para este trabalho é explorar a capacidade de dissipação das
SMAs para evitar comportamentos indesejados do sistema rotor-mancal. O
comportamento termomecânico das SMAs é descrito através do modelo constitutivo
proposto
por
PAIVA et
al.
(2005).
Este modelo
contempla os
principais
comportamentos fenomenológicos das SMAs, e apresenta uma boa concordância com
resultados experimentais.
O objetivo deste trabalho é fazer uma investigação qualitativa de um sistema
rotor-mancal que explora as características das ligas com memória de forma na
redução de vibrações. O comportamento desse sistema é comparado com o
equivalente elástico mostrando como as SMAs podem ser utilizadas na redução de
3
vibrações de sistemas rotativos. Não é objetivo deste trabalho apresentar a concepção
do sistema.
1.1 Ligas com memória de forma
As ligas com memória de forma (do inglês: Shape Memory Alloy - SMA) são
elementos metálicos capazes de recuperar elevados índices de deformação (em torno
de oito por cento) devido a transformações de fase sofridas pelo material. É possível,
ainda, restringir a recuperação do material, criando um campo de tensões que pode
ser útil nas mais variadas aplicações.
Neste contexto, tem se tornado cada vez maior a necessidade de modelos
matemáticos capazes de descrever comportamento destes materiais de maneira
adequada, visando uma correta análise e permitindo explorar todo seu potencial. A
modelagem constitutiva do comportamento termomecânico das SMAs pode ser
desenvolvida sob os pontos de vista microscópico ou macroscópico (BIRMAN, 1997).
A primeira abordagem engloba, na verdade, os enfoques microscópicos e
mesoscópico, onde o primeiro diz respeito aos aspectos metalúrgicos no âmbito
molecular, enquanto o segundo leva em consideração informações sobre a estrutura
cristalina (PAIVA & SAVI 2006). Esta abordagem é tratada por diversos autores
incluindo: WARLIMONT (1974), NISHIYAMA (1978), ACHENBACH & MÜLLER (1982),
FISCHER & TANAKA (1992), SUN & HWANG (1993), COMSTOCK et al. (1996), LU &
WENG (1998), LEVITAS et al. (1998), GALL et al. (1999), SITTNER & NOVÁK (2000),
MULLER & SEELECKE (2001), ENTCHEV & LAGOUDAS (2002); KLOUCEK et al.
(2004), entre outros. Em contrapartida, a abordagem macroscópica apresenta uma
preocupação com a resposta fenomenológica do material. Este tipo de modelagem
também é amplamente explorado na literatura como, por exemplo, nos trabalhos
apresentados por: TANAKA & NAGAKI (1982); FALK (1983); LIANG & ROGERS
(1990); BERVEILLER et al. (1991); BRINSON (1993); ABEYARATNE et al. (1994);
LECLERCQ et al. (1995); SILVA (1995); BOYD & LAGOUDAS (1996); FREMOND
(1996); GOVINDJEE & KASPER (1997); AURICCHIO et al. (1997); SOUZA et al.
(1998); ZHANG & MCORMICK (2000); PAIVA et al. (2005); HERZOG & JACQUET
(2007), entre outros.
As SMAs mais estudadas são: Níquel-Titânio (Ni-Ti); Cobre-Alumínio-Níquel
(Cu-Al-Ni); Ferro-Manganês-Alumínio-Cromo (Fe-Mn-Al-Cr) e Cobre-Zinco-Alumínio
(Cu-Zn-Al), com destaque para as ligas Ni-Ti, comercialmente conhecidas como
4
Nitinol, que são exploradas desde a década de sessenta, quando foram desenvolvidas
pelo U.S. Naval Ordnance Laboratory – NOL (BUEHLER & WILEY, 1965).
Basicamente, as SMAs apresentam duas fases cristalográficas distintas: a
austenita (estável a alta temperatura) e a martensita (estável a baixa temperatura).
Enquanto a austenita possui uma estrutura cúbica de corpo centrado bem ordenada
que apresenta apenas uma variante, a martensita pode apresentar até vinte e quatro
variantes para o caso mais geral (FUNAKUBO, 1987) e sua estrutura depende do tipo
de transformação sofrida pelo material (OTSUKA & REN, 1999; WU & LIN, 2000). Esta
martensita pode ser induzida por temperatura (dita maclada, ou em inglês, twinned) ou
por tensão (chamada de não-maclada, ou em inglês, detwinned). A martensita
maclada não possui direção preferencial para sua formação, podendo apresentar as
vinte e quatro variantes possíveis. Já a martensita não-maclada, possui apenas as
variantes que possuem um alinhamento favorável à direção do carregamento ao qual
a amostra está submetida.
Devido às suas características singulares, as SMAs têm atraído grande
interesse tecnológico em diversos campos da ciência e da engenharia, da área
biomédica à indústria aeroespacial, passando pela indústria do petróleo e gás e
indústria automotiva. O sucesso das aplicações de SMA nas áreas médica e
odontológica deve-se, fundamentalmente, à sua excelente bio-compatibilidade (em
especial das ligas Ni-Ti) e à característica pouco invasiva das intervenções envolvendo
instrumentos de SMA. Dentre as principais aplicações nestas áreas, é possível
destacar: instrumentos cirúrgicos, dispositivos cardiovasculares e mecanismos
ortopédicos e ortodônticos. MACHADO & SAVI (2002, 2003) apresentaram uma
revisão bibliográfica detalhada acerca de aplicações das SMAs nestas áreas.
1.2 Organização do trabalho
Este trabalho está dividido em cinco capítulos. Este primeiro capítulo
apresenta uma breve introdução sobre o assunto a ser abordado, além de uma
motivação à execução do trabalho e de seu objetivo.
No segundo capítulo, é feita uma descrição da modelagem matemática do
sistema rotor-mancal, incluindo a modelagem constitutiva das SMAs.
O terceiro capítulo destina-se a uma verificação do modelo adotado partindo
da verificação do sistema com uma dimensão e com suporte descontínuo elástico,
passando pelo sistema unidimensional com suporte descontínuo utilizando ligas com
5
memória de forma. Os modelos unidimensionais são uma simplificação do movimento
do sistema rotor-mancal nas duas direções.
Utilizando um modelo bidimensional, primeiramente são verificados os
resultados com mancal utilizando elementos elásticos. Estes resultados são
comparados aos apresentados por WIERCIGROCH et al. (2002). Por fim, utilizando
um sistema bidimensional a alta temperatura, são comparados os resultados do
sistema com mancal com elementos elásticos aos resultados do sistema com mancal
utilizando elementos com memória de forma trabalhando a alta temperatura, ou seja,
onde as ligas de SMA não transformam de fase. Nesta situação o sistema rotormancal utilizando elementos de SMA se comporta de maneira idêntica ao sistema
utilizando elementos elásticos, devido ao comportamento linear das ligas à alta
temperatura.
No quarto capítulo, apresentam-se os resultados obtidos para o sistema rotormancal utilizando elementos de ligas de memória de forma, destacando uma
comparação com o sistema equivalente elástico.
É explorado o comportamento histerético das ligas através de uma análise do
movimento em vibração livre, onde é mostrado que os elementos de SMA dissipam
energia do sistema enquanto que o sistema com elementos elásticos permanece sem
apresentar perdas de energia. Após esta análise são apresentados os resultados do
sistema rotor-mancal com a presença de vibração forçada e com isso é mostrado que
o comportamento dissipativo das ligas representa uma melhora significativa quando
comparado com o sistema utilizando elementos elásticos.
Ainda no quarto capítulo é explorado o comportamento do sistema rotormancal com elementos de SMA sob o efeito da assimetria tração-compressão e por
fim sob o efeito da variação do amortecimento viscoso do rotor. O sistema que utiliza
elementos elásticos apresenta comportamento caótico e com a utilização dos
elementos de SMA este comportamento não-linear apresentado se transforma de tal
maneira que apresenta comportamento harmônico periódico.
O quinto capítulo é destinado às considerações finais e sugestões para
trabalhos futuros.
6
2. Modelagem matemática
O objetivo deste capítulo é apresentar um modelo matemático para descrever a
dinâmica de um sistema rotor-mancal. Inicialmente, apresenta-se o sistema rotormancal bidimensional e considera-se um mancal com comportamento elástico. Em
seguida, passa-se a tratar um sistema onde o mancal é composto por ligas com
memória de forma. O comportamento termomecânico das SMAs é descrito através do
modelo proposto por PAIVA et al. (2005).
2.1 Sistema rotor-mancal
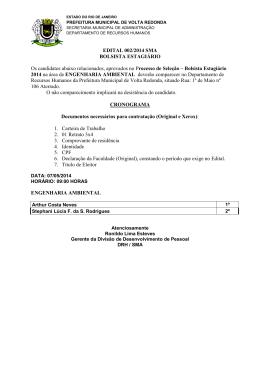
Considere o sistema rotor-mancal mostrado na Figura 1. Trata-se de um rotor
Jeffcott bidimensional que é excitado por uma massa rotativa desbalanceada m , que
fica a uma distância ρ do centro do rotor. Durante a operação, o rotor de massa M
toca intermitentemente as paredes do mancal. Na Figura 1 também estão
representados o amortecimento e a rigidez do eixo do rotor, c e k 1 , respectivamente,
e o amortecimento e a rigidez do mancal, cs e k 2 , respectivamente. A Figura 2 mostra
um desenho esquemático do contato rotor-mancal. Nesta Figura, O s
e Or
representam a posição inicial do mancal e do rotor respectivamente; a excentricidade
é representada por e x e e y , onde a primeira representa a distância horizontal entre os
centros do mancal ( O s ) e do rotor ( O r ). Da mesma maneira tem-se que e y representa
a excentricidade vertical do rotor. Considera-se, também, a folga γ entre o rotor e o
mancal que deve respeitar a restrição física:
(1)
e 2x + e 2y ≤ γ
7
Figura 1 – Modelo físico do sistema rotor-mancal.
Figura 2 – Sistema de coordenadas do sistema rotor-mancal.
Assume-se que a massa do mancal é desprezível. Segundo modelos
anteriores (GONSALVES et al., 1995 e WIERCIGROCH et al., 2002), a
descontinuidade aparece através da intermitência no contato entre o rotor e o mancal,
tornando o problema não-linear. Portanto as equações de movimento são:
8
k 2 (R − γ ) cos ψ, R ≥ γ
2
M &x& + cx& + k 1 x +
= mρ Ω cos(ϕ + Ω t )
0
,
R
<
γ
(2)
k 2 (R − γ )sen ψ, R ≥ γ
2
M &y& + cy& + k 1 y +
= mρΩ sen (ϕ + Ω t )
R<γ
0,
(3)
onde
R=
(x − e x )2 + (y − e y )2
cos ψ =
senψ =
(4)
(x − e x )
(5)
R
(y − e )
y
(6)
R
Observa-se que (R − γ ) é o movimento radial do mancal em relação à sua
posição inicial, ϕ é o ângulo de fase inicial, Ω é a frequência angular de rotação do
rotor e ψ é o ângulo que o módulo do deslocamento radial do rotor, R , faz com a
direção horizontal.
Para os resultados que são apresentados neste trabalho, são desconsiderados
os efeitos da excentricidade da massa desbalanceadora e com isso e x = e y = 0 .
2.2 Sistema rotor-mancal com memória de
forma
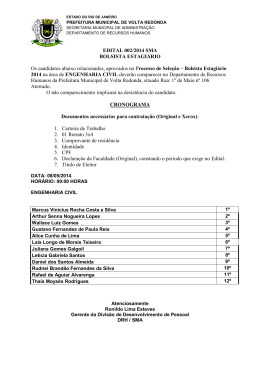
Considere agora o sistema rotor-mancal mostrado na Figura 3. Trata-se mais
uma vez de um rotor Jeffcott, bidimensional, excitado por uma massa rotativa
desbalanceada. Durante a operação, o rotor toca intermitentemente as paredes do
mancal que possuem elementos de SMA. O sistema apresentado possui as mesmas
características do sistema tratado na seção anterior, diferindo apenas pelas
características do mancal, representada por uma rigidez variável. A próxima seção
apresenta uma discussão sobre o modelo constitutivo utilizado para descrever este
comportamento termomecânico.
9
Figura 3 – Modelo físico do sistema rotor-mancal com SMA.
2.2.1 Modelo constitutivo
O modelo constitutivo a ser adotado neste trabalho é uma simplificação do
modelo proposto por PAIVA et al. (2005) que, por sua vez, é baseado no modelo com
restrições internas proposto por FREMOND (1987; 1996).
O modelo desenvolvido por PAIVA et al. (2005) é unidimensional e considera
quatro fases macroscópicas, sendo capaz de descrever os comportamentos de
pseudoelasticidade, efeito de memória de forma, transformação de fase induzida por
variação de temperatura, plasticidade clássica, assimetria no comportamento à tração
e à compressão, acoplamento entre os fenômenos de plasticidade e transformação de
fase, e sub-laços internos devidos a transformações de fase incompletas.
Neste trabalho, desconsidera-se o fenômeno de plasticidade. As equações
constitutivas para o modelo são apresentadas a seguir:
(
)
σ = E ε + α Chβ 2 − α Thβ1 + α Cβ 2 − α Tβ1 − Θ (T − T0 )
10
(7)
{
(
)
2
1
β& 1 =
α T ε + Λ + β 2 α Ch α T + α Th α C + Eα Th α Ch − β1 2α Th α T + Eα Th −
η1
(
)
(8)
}
− α [E ε − Θ (T − T0 )] − ∂ β 1 J π + ∂ β& 1 J χ
T
h
(
)
2
1
β& 2 =
− α C ε + Λ + β1 α Th α C + α Ch α T + Eα Ch α Th − β 2 2α Ch α C + Eα Ch −
η2
{
(
)
}
(9)
− α [E ε − Θ (T − T0 )] − ∂ β 2 J π + ∂ β& 2 J χ
C
h
1 1
C
T
β& 3 =
− (E A − E M ) ε + α h β 2 − α h β1
η3 2
(
)
2
+ Λ3 +
[
]
}
(10)
+ (Θ A − Θ M ) (T − T0 ) ε + α β 2 − α β − ∂ β 3 J π + ∂ β& 3 J χ
C
h
T
h 1
onde σ é a tensão axial, ε é a deformação axial, T é a temperatura absoluta, β1 e
β2 são frações volumétricas associadas às variantes martensíticas associadas à
tração e à compressão, respectivamente e β3 é a fração volumétrica associada à fase
austenítica. Além disso
E = E M + β3 (E A − E M ) é o módulo de elasticidade,
Θ = Θ M + β3 (Θ A − Θ M ) está relacionado ao coeficiente de expansão térmica e T0 é
uma temperatura de referência, para a qual só se tem deformação nula. Os índices
subscritos A e M se referem às fases austenítica e martensítica, respectivamente.
Além disso, diferentes parâmetros são assumidos para considerar a assimetria traçãocompressão, onde os índices superiores " T" se referem às propriedades de tração e
" C" às de compressão. Os parâmetros Λ = Λ (T ) e Λ 3 = Λ 3 (T ) são parâmetros
associados às transformações de fases induzidas por tensão. E A e E M são os
módulos de elasticidade da austenita e da martensita, respectivamente, assim como
Θ A e Θ M são parâmetros relacionados aos coeficientes de expansão térmica da
austenita e da martensita, respectivamente. O parâmetro α está relacionado à altura
do laço de histerese, enquanto α h está relacionado à sua largura. Os termos
∂ n J π (n = β1 , β 2 , β3 ) são as sub-diferenciais da função indicatriz J π com respeito a
βn (n = 1,2,3) . Esta função indicatriz refere-se às restrições internas relacionadas a
coexistência das fases do modelo.
(
)
Os termos ∂ n J χ n = β& 1 , β& 2 , β& 3 , por sua vez, são sub-diferenciais da função
indicatriz J χ com respeito a β n (n = 1,2,3) . Esta função indicatriz está associada às
11
condições para a correta descrição de sub-laços internos devido a transformações de
fase incompletas. Estas restrições, além de auxiliarem a correta descrição dos sublaços internos, também evitam o surgimento de transformações fisicamente
inexistentes, ou seja: M + ⇒ M e M − ⇒ M . Os parâmetros Λ e Λ 3 são funções da
temperatura, definidas a seguir:
L
(T − TM ) se T > TM
− L 0 +
TM
Λ = 2Λ M =
;
− L se T ≤ T
M
0
(11)
A LA
(T − TM ) se T > TM
− L 0 +
TM
Λ 3= Λ M + Λ A =
;
− LA se T ≤ T
M
0
(12)
onde TM é a temperatura abaixo da qual a fase martensítica é estável; L 0 , L , LA0 e
LA são parâmetros associados às tensões críticas para a transformação de fase.
De forma a contemplar diferentes características da cinética de transformação
de fase para o processo de carregamento e descarregamento, é possível considerar
diferentes valores para o parâmetro ηn (n = 1,2,3) que, por sua vez, está relacionado à
dissipação interna. Para maiores detalhes do modelo, sugere-se consultar PAIVA et al.
(2005) e SAVI & PAIVA (2005).
2.2.2 Equações do movimento
Esta seção apresenta a formulação das equações de movimento para um
sistema rotor-mancal utilizando elementos de ligas com memória de forma no mancal.
Admite-se que a dissipação de energia diferente da histerética é descrita a partir de
um amortecimento viscoso linear. Para contemplar a força axial FSMA desenvolvida no
elemento de SMA considera-se esse elemento ora submetido à tração ora à
compressão tal que: FSMA = σ A , onde σ é a tensão no elemento de SMA, enquanto
A é a área equivalente da seção transversal.
Portanto, reescrevendo as equações (2) e (3), tem-se:
12
σ x A + c s x& ,
M &x& + cx& + kx +
0,
R ≥ γ
2
= mρΩ cos(ϕ + Ω t )
R<γ
(13)
σ y A + c s y& ,
M &y& + cy& + ky +
0,
R ≥ γ
2
= mρΩ sen (ϕ + Ω t )
R < γ
(14)
∆l
, onde l é o comprimento inicial do
l
é o alongamento. Portanto, ∆ l = ( R − γ ) cos ψ e
A deformação pode ser avaliada como ε =
elemento de SMA e ∆ l
∆l = (R − γ ) senψ , para as direções x e y respectivamente.
2.2.3 Procedimento numérico
De
posse
das
equações
de
movimento,
é
necessário
integrá-las
numericamente. A técnica da partição do operador associada a um procedimento
iterativo permite uma solução adequada do problema não-linear. Esta técnica consiste
em dividir o espaço de estado em subespaços que podem ser resolvidos
separadamente. O resultado de um subespaço é utilizado como entrada para a
solução do outro subespaço e com isso pode-se utilizar algoritmos clássicos para
avaliar cada sub-parte do sistema. Esta técnica foi aplicada por SAVI e colaboradores.
Num primeiro caso, SAVI et al. (1997) empregaram uma liga com memória de forma
como elemento restituidor, onde foi utilizado o modelo de FREMOND (1987).
Posteriormente SAVI et al. (2005) consideraram um elemento restituidor elastoplástico
com efeito de endurecimento isotrópico e cinemático.
Para aplicar a técnica, avalia-se a dinâmica do sistema assumindo que não
ocorrem transformações de fase. A seguir, avaliam-se as equações constitutivas da
SMA. O procedimento deve seguir até que seja atingida a convergência das variáveis
de interesse.
O sistema rotor-mancal com memória de forma possui ao todo sete graus de
liberdade e com a técnica de partição do operador este sistema será dividido em duas
partes. Isto permite tratar o problema acoplado a partir de problemas desacoplados.
Uma parte representa o espaço de fase, que engloba as variáveis x , x ′ , y e y′ . O
outro é o espaço das variáveis internas do modelo da liga, β1 , β2 , e β 3 . Este
procedimento permite que a primeira parte do sistema, referente ao espaço de fase do
sistema rotor-mancal, seja resolvido pelo algoritmo de Runge Kutta de 4ª ordem,
enquanto a solução da segunda parte, referente às variáveis internas do modelo,
13
emprega-se novamente a técnica de partição do operador (ORTIZ et al., 1983)
associada a um procedimento iterativo. Inicialmente, o procedimento isola as
subdiferenciais e utiliza o método de Euler implícito para calcular as frações
volumétricas. Um algoritmo de projeção ortogonal garante que as frações volumétricas
de cada fase obedecerão às restrições de coexistência.
A integração das equações de movimento do oscilador é realizada
considerando as variáveis internas do modelo da liga ( β1 , β2 , e β3 ) parâmetros
conhecidos. Assim, uma primeira estimativa para o valor da deformação (ou
deslocamento) é obtida, mantendo-se constantes os valores das variáveis internas da
liga em relação ao instante de tempo anterior.
O valor de deformação (ou deslocamento) obtido é utilizado como argumento
de entrada para a avaliação do modelo constitutivo, atualizando então os valores das
suas variáveis internas, obtendo por consequência um novo valor de σ .
Desta
maneira, retorna-se às equações do espaço de fase do oscilador, integrando-as
utilizando os novos valores de β , e este procedimento é repetido até que se obtenha a
convergência, que é definida pela diferença do valor da iteração anterior da
deformação pelo valor da iteração atual. Esta diferença é comparada com um valor de
tolerância definido.
Portanto, para lidar com as não linearidades das equações de movimento, um
procedimento iterativo baseado na técnica da partição do operador é empregado. O
método de Runge-Kutta é utilizado em conjunto com Euler Implícito e um algoritmo de
projeção ortogonal proposto por SAVI et al. (2005) para solução das equações
constitutivas. Desta forma, os espaços de estado das equações dinâmicas do
oscilador e das equações constitutivas da liga são desacoplados, permitindo o uso das
técnicas convencionais adotadas para solução de cada subespaço do problema.
14
3. Verificação do modelo
Este capítulo tem por objetivo apresentar uma verificação do modelo
matemático proposto considerando primeiramente uma simplificação do sistema para
uma direção, ou seja, um rotor-mancal unidimensional com suporte descontínuo
utilizando SMA e depois, considerando um sistema rotor-mancal bidimensional com
suporte descontínuo constituído por elementos lineares.
A verificação é feita a partir de simulações numéricas para o sistema rotormancal bidimensional utilizando ligas com memória de forma a altas temperaturas, ou
seja, onde a SMA apresenta características lineares. Sendo assim, as respostas do
sistema devem ser idênticas às encontradas na seção onde o suporte descontínuo é
de material elástico.
3.1 Sistema rotor-mancal unidimensional
Para iniciar o procedimento de verificação dos resultados, considera-se o
sistema rotor-mancal unidimensional com apenas um suporte descontínuo. A
verificação do modelo é feita seguindo o mesmo procedimento proposto por SANTOS
& SAVI (2009), que compara os resultados para um oscilador não-suave elástico e
outro com SMA. Os parâmetros do sistema rotor-mancal para movimento
unidimensional são apresentados na Tabela 1 e as propriedades das SMAs estão
apresentadas na Tabela 2.
Tabela 1 – Parâmetros do sistema rotor-mancal unidimensional.
m (kg) cs (N.s/m)
0,838
0,6
γ (m)
F (N)
-0,124
4,5
ω (rad/s) k (N/m)
2,3
15
8,47
k s (N/m)
A (m2)
1350
2,5 x 10-8
Tabela 2 – Propriedades das SMAs segundo SANTOS & SAVI (2009).
E A (GPa)
E M (GPa)
α C (MPa)
α T (MPa)
54
42
150
150
L (MPa)
LA0 (MPa)
LA (MPa)
L 0 (MPa)
4,0
6,3
165
0,15
εR
T0 (K)
Θ M (MPa/K) Θ A (MPa/K)
0,17
0,74
0,055
298
η U (MPa.s)
η LA (MPa.s)
η UA (MPa.s)
η L (MPa.s)
2,0
0,5
1,0
0,5
Figura 4 – Modelo de um oscilador não-suave com rigidez descontínua.
A Figura 4 apresenta a versão unidimensional do sistema que está associada
ao sistema rotor-mancal com rigidez descontínua, devido ao impacto contra um
suporte cujo comportamento é elástico linear. Este sistema é composto por uma
massa m , conectada a dois elementos elásticos lineares com rigidez k . O processo
de dissipação de energia não-histerético é representado por um amortecimento
viscoso linear c. Além disso, é considerado um suporte sem massa, composto por um
elemento elástico linear k s e amortecimento viscoso linear cs . O deslocamento da
16
massa m é denotado por x e contado a partir da sua posição de equilíbrio. A força de
excitação se caracteriza por uma força cossenoidal F cos(ωt ) .
A distância entre a massa e o suporte, chamada de folga, também é um
parâmetro do modelo, representado por γ . Neste ponto, vale destacar que valores
negativos para o parâmetro γ , observados mais adiante, devem ser entendidos como
uma condição inicial de pré-compressão do suporte contra a massa.
O parâmetro A está associado ao elemento de SMA e representa a área
equivalente do elemento.
A Figura 5 apresenta as órbitas no espaço de fase e a seção de Poincaré, para
os casos com suporte descontínuo elástico e de SMA. A Figura 5.a mostra a resposta
do sistema com suporte elástico apresentando um comportamento complexo,
aparentemente caótico. A Figura 5.b apresenta a resposta do sistema com suporte de
SMA, onde se observa um comportamento regular, representado por um único ponto
na seção de Poincaré, indicando um comportamento periódico de período-1.
Comparando-se os dois casos, pode-se afirmar que a utilização do suporte
descontínuo com SMA tende a reduzir a complexidade da resposta do sistema.
(a) modelo com suporte linear
(b) modelo com suporte SMA
Figura 5 – Espaço de fase e seção de Poincaré para γ = −0,124m .
Esses resultados estão coerentes com os resultados disponíveis na literatura
(SANTOS & SAVI, 2009) e servem para ilustrar a aplicabilidade das ligas com
memória de forma, visando a atenuação/controle de vibrações em sistemas dinâmicos.
17
3.2
Sistema
rotor-mancal
com
suporte
descontínuo
A verificação do modelo rotor-mancal bidimensional é baseada nos resultados
de WIERCIGROCH et al. (2002) que trata o sistema com suporte elástico. Numa
primeira etapa, compara-se as respostas para o sistema com suporte elástico, e
posteriormente, considera-se que o suporte possua elementos compostos por ligas
com memória de forma. A verificação desta última etapa se torna mais complexa visto
que os resultados de um sistema rotor-mancal SMAs ainda não estão disponíveis na
literatura.
Neste contexto, consideram-se casos a altas temperaturas, de tal forma que as
transformações de fase não ocorram.
3.2.1 Sistema rotor-mancal com suporte
elástico
O trabalho de WIERCIGROCH et al. (2002) apresenta os resultados de um
sistema rotor-mancal, apresentando uma descontinuidade devida à presença de uma
folga radial entre o rotor e o mancal. O comportamento deste sistema se apresenta de
maneira linear sem a presença da folga radial, porém, com a presença desta folga, o
rotor toca intermitentemente no mancal, tornando o problema não-linear.
Tabela 3 – Parâmetros do sistema rotor-mancal.
m (kg)
c (N.s/m)
γ (m)
ρ (m)
0,17
26
1
70
Ω (rad/s) k (N/m)
2,6
100
k s (N/m)
A (m2)
3000
5,55 x 10-8
Além dos dados apresentados na Tabela 3 é considerado que o amortecimento
viscoso do mancal ( cs ) é nulo.
A dinâmica do sistema rotor-mancal é muito rica e essa riqueza pode ser
verificada a partir da simulação apresentada na Figura 6 na forma de evolução no
18
tempo. Para c = 26 N.s / m tem-se uma resposta de período-2 mostrada na Figura 6.a
e 6.b. A resposta do sistema passa a ser caótica considerando c = 22 N.s / m ,
conforme pode ser visto na Figura 6.c e Figura 6.d.
(a)
(b)
(c)
(d)
Figura 6 – Evolução no tempo para (a) deslocamento em x para movimento de período
dois, (b) velocidade em x para movimento de período dois e (c) deslocamento
em x para movimento caótico e (d) deslocamento em y para movimento
caótico.
A Figura 7 mostra o comportamento das órbitas do espaço de fase. A Figura
7.a mostra a resposta de período-2 enquanto a Figura 7.b mostra a reposta caótica,
onde se observa uma complexidade do comportamento, quando comparado ao
comportamento da Figura 6.a. Estes resultados atestam a sensibilidade qualitativa que
sistemas não lineares possuem, tanto à variação de parâmetros, quanto à variação de
condições iniciais. Estes resultados estão coerentes com aqueles apresentados em
WIERCIGROCH et al. (2002).
19
(a)
(b)
Figura 7 – Órbitas do espaço de fase (a) periódico e (b) caótico.
3.2.2 Sistema rotor-mancal com suporte de
SMA
Nesta etapa, é feita uma verificação do modelo a alta temperatura (T = 493K ) .
Nessa condição, a austenita é estável para qualquer campo de tensão aplicado e,
portanto, não ocorrem transformações de fase. Desta forma, os resultados do sistema
rotor-mancal com SMA devem ser iguais aos do sistema com suporte elástico
apresentados no trabalho de WIERCIGROCH et al. (2002).
Serão utilizados os mesmos parâmetros da seção anterior, além da área da
seção transversal do elemento de SMA igual a A = 5,55 × 10 −8 m ² . A ausência das
transformações de fase é representada por valores constantes das diversas frações
volumétricas para ambas as direções, mostrada na Figura 8.
20
(a)
(b)
Figura 8 – Evolução dos parâmetros β n (a) na direção x e (b) na direção y.
Outra forma de verificar o comportamento do sistema é através da curva forçadeslocamento. A Figura 9 mostra essas curvas nas direções x e y. Observe que o
comportamento do sistema elástico é igual ao sistema com SMA.
(a)
(b)
Figura 9 – Força vs. deslocamento (a) na direção x e (b) na direção y.
(a)
(b)
Figura 10 – Evolução no tempo para deslocamento e velocidade.
21
A Figura 10 mostra a evolução no tempo para deslocamento e velocidade na
direção horizontal para uma resposta de período dois. Com a variação do
amortecimento ( c ), o sistema migra de um resultado periódico para um caótico como
já foi exposto na seção anterior. A Figura 11 mostra as órbitas do espaço de fase tanto
para o movimento periódico quanto para o movimento caótico. Essas Figuras
correspondem às simulações realizadas para o caso elástico.
(a)
(b)
Figura 11 – Órbitas do espaço de fase (a) periódico e (b) caótico.
Desta seção, conclui-se que o modelo com memória de forma apresenta
resultados similares aos apresentados na literatura disponível, tanto na versão
unidimensional com suporte elástico, quanto na versão bidimensional também com
suporte elástico. A partir deste ponto, desenvolvem-se simulações explorando as
transformações de fase o que introduz uma nova fonte de não-linearidade ao
problema.
22
4. Sistema rotor-mancal com memória
de forma
Este capítulo tem por objetivo apresentar os resultados do sistema rotormancal com suporte não-suave de SMA, explorando o comportamento pseudoelástico
destas ligas. Os dados geométricos e estruturais do conjunto rotor-mancal são
apresentados na Tabela 4 e as propriedades das SMAs estão apresentadas na Tabela
5.
Visando uma análise mais realista, propõe-se um elemento de SMA que possui
uma área equivalente similar a rigidez de uma mola (SHIGLEY,2006). Desta forma, o
elemento de SMA pode ser uma pastilha, uma mola de flexão ou uma mola de traçãocompressão. A Tabela 4 apresenta as características de uma mola utilizada como
referência para o elemento de SMA. Nessa Tabela, D representa o diâmetro do
elemento de SMA, d representa o diâmetro do fio do elemento,
N o número de
espiras ativas, k S representa a rigidez do elemento na fase estável da austenita, d eixo
representa o diâmetro do eixo do rotor, M representa a massa do rotor, J p representa
o momento de inércia e k representa a rigidez do eixo do rotor. Para o problema
dinâmico é utilizada a temperatura ambiente ( T = 298 K ) o amortecimento do eixo do
rotor e do mancal são desprezados, a folga entre o rotor e o mancal é de 0,002m ( γ ),
as condições iniciais para o deslocamento nas duas direções é de 0,0001m, a
distância da massa desbalanceada ao centro de giro do rotor é de 0,055m ( ρ ) e a
frequência angular de forçamento é de 1,8 rad / s . Dados como condição inicial em
velocidade e excentricidade do centro de giro do rotor são desprezados ( v 01 = v 02 = 0
e e x = e y = 0 ).
Tabela 4 – Dados geométricos do sistema rotor-mancal.
D (m)
d (m)
N
k s (N/m)
0,008
0,0003
10
2,867
J p (m4)
k (N/m)
d eixo (m)
M (kg)
9,81 x 10-10
3,92
0,01
15
23
Na Tabela 5, G A representa o módulo de cisalhamento da SMA que é utilizado
para o cálculo da rigidez do elemento de SMA.
Tabela 5 – Propriedades das SMAs.
E A (GPa)
E M (GPa)
α T (MPa)
α C (MPa)
εR
G A (GPa)
54
42
50
50
0,0555
14,5
L 0 (MPa)
L (MPa)
LA0 (MPa)
LA (MPa)
Θ A (MPa/K)
Θ M (MPa/K)
0,15
4,0
6,3
165
0,74
0,17
η L (MPa.s)
η U (MPa.s)
η LA (MPa.s)
η UA (MPa.s)
TM (K)
T0 (K)
5,0
5,0
2,0
2,0
201,4
298,0
Em todos os resultados apresentados neste capítulo, são utilizados os dados e
parâmetros acima, salvo quando expresso em contrário no texto.
4.1 Vibração Livre
Esta seção tem por objetivo apresentar os resultados do comportamento de um
rotor idealizado com movimento nas direções vertical e horizontal com suporte nãosuave de SMA e que não apresenta vibração forçada. Com isso, pretende-se
demonstrar que o material com memória de forma apresenta dissipação de energia
devido ao seu comportamento histerético.
Para simular o caso com vibração livre considera-se que a massa
desbalanceadora é nula ( m = 0 ), visando eliminar a força desbalanceada. Também se
despreza o amortecimento do rotor e do mancal. Desta forma a condição inicial em
deslocamento para ambas as direções deve ser maior do que a folga entre o rotor e
mancal ( s 01 = s 02 = 0,004m ), para que os elementos de SMA do mancal sejam
acionados e, consequentemente, haja transformação de fase e dissipação de energia.
A Figura 12 mostra a evolução no tempo do deslocamento do rotor tanto na
direção horizontal (x) quanto na vertical (y). Pode-se observar que o movimento vai
reduzindo a amplitude até que se atinja a amplitude do deslocamento do rotor, tanto
24
na direção x quanto na direção y, de aproximadamente 0,0017m. A dissipação de
energia está associada, portanto, ao comportamento histerético das ligas de memória
de forma.
(a)
(b)
Figura 12 - Evolução no tempo do deslocamento (a) direção horizontal e (b) direção
vertical.
A Figura 13 mostra a curva força-deslocamento evidenciando o comportamento
histerético das ligas. O regime permanente do movimento está associado a uma
resposta elástica da fase matriz (austenítica).
(a)
(b)
Figura 13 - Diagrama força x deformação para (a) direção horizontal e (b) direção
vertical.
Observando o diagrama força-deslocamento vê-se que quando o movimento se
inicia, com amplitude do deslocamento 0,004m (mostrado na Figura 12), tem-se o laço
mais externo tanto na compressão quanto na tração do elemento de SMA e com a
sucessiva perda de energia ao longo do movimento tem-se a presença dos sublaços
25
internos, o que mostra que o sistema está dissipando energia. Após essa fase
transiente, o sistema se estabiliza com amplitude de deslocamento do elemento de
SMA de aproximadamente 0,0003m.
A Figura 14 mostra espaço de fase representado por uma espiral que tende
para uma órbita estável, que apresenta nas duas direções uma amplitude de
deslocamento do rotor de 0,0017m.
(a)
(b)
Figura 14 - Órbitas do espaço de fase (a) x × x ' e (b) y × y' .
Quando se compara o comportamento do sistema rotor-mancal utilizando
elementos elásticos com o sistema utilizando elementos de SMA, nota-se que a
característica dissipativa do material com memória de forma reduz a amplitude de
vibração, tendendo para um comportamento de período 1. A resposta dos elementos
com memória de forma está intimamente ligada à temperatura de trabalho e, portanto,
propõe-se uma variação da temperatura para observar o comportamento do conjunto
em três diferentes temperaturas: 298K , 320K e 373K . Considera-se que a
temperatura ambiente é igual a 298K .
Primeiramente, é mostrada a evolução no tempo do deslocamento, tanto na
direção vertical, quanto na direção horizontal (Figura 15). Nota-se que para um
sistema cujo conjunto é totalmente composto por elementos de características
elásticas lineares, a resposta no tempo é harmônica, oscilando entre 0,004m e 0,004m. No sistema com elementos de ligas com memória de forma existe uma perda
de energia que segue até
t = 4500s aproximadamente, atingindo o regime
permanente, oscilando entre 0,002m e -0,002m aproximadamente. Assim, a partir do
ponto onde o sistema entra em regime permanente, observa-se que à medida que a
temperatura aumenta a tensão crítica para a transformação de fase martensítica (que
define a região elástica da fase matriz) também aumenta. Em regime permanente, o
26
sistema apresenta uma amplitude de oscilação ligeiramente crescente com a
temperatura, conforme as Figuras 16.b e 16.d. Com isso na temperatura ambiente o
sistema dissipa mais energia quando comparado com o caso elástico e com os demais
casos utilizando SMA.
(a)
(b)
(c)
(d)
Figura 15 - (a) Evolução no tempo do deslocamento na direção horizontal, (b) Detalhe
da evolução no tempo do deslocamento na direção horizontal para
4900 ≤ t (s) ≤ 5000 , (c) Evolução no tempo do deslocamento na direção vertical e (d)
Detalhe da evolução no tempo do deslocamento na direção vertical para
4900 ≤ t (s) ≤ 5000 .
As Figuras 16.a e 16.b mostram os diagramas força-deslocamento tanto para
os elementos de SMA quanto para o elemento elástico, para as duas direções, (x) e
(y). Neste ponto, verifica-se que com o aumento da temperatura as ligas apresentam
maiores tensões críticas para a transformação de fase, afastando o laço de histerese
da origem.
Para este caso em particular, se o sistema utilizar as SMAs na temperatura
ambiente, a perda de energia é maior e isto se deve ao aumento da frequência com
que a liga passa pela região do laço de histerese, e com isso tem-se o sistema
27
oscilando a uma amplitude menor quando comparada ao caso elástico e com SMA às
temperaturas de 320K e 373K.
(a)
(b)
Figura 16 – Diagrama força x deslocamento para (a) direção horizontal e (b) direção
vertical.
O mesmo comportamento observado na Figura 16.a pode ser observado na
Figura 16.b e com isso pode-se dizer que o sistema oscila, para este caso, da mesma
maneira nas duas direções e não há influência de uma direção sobre a outra.
A Figura 17 mostra que os sistemas utilizando SMAs apresentam órbitas
internas àquela do sistema utilizando elementos puramente elásticos e que quando a
temperatura de trabalho é a ambiente, a órbita do espaço de fase é a mais interna,
apresentando menores amplitudes de oscilação e, também menores velocidades.
(a)
(b)
Figura 17 - Órbitas do espaço de fase (a) x × x ' e (b) y × y' .
28
4.2 Vibração Forçada
Esta seção tem por objetivo apresentar os resultados da resposta forçada do
sistema rotor-mancal com suporte não-suave de SMA quando comparado a um
sistema utilizando a descontinuidade com material elástico. Para isso o amortecimento
do rotor e do mancal são desprezados ( c = cs = 0 ), assim como a excentricidade do
centro de giro do rotor ( e x = e y = 0 ). A folga entre o rotor e o mancal é de 0,002m e a
distância da massa desbalanceada ao centro de giro é de 0,055m. A frequência
angular de forçamento é de 1,8 rad/s.
Inicialmente, apresenta-se a resposta do rotor ao longo do tempo. Na Figura
18.a nota-se que existe um regime transiente até t = 2300s aproximadamente, e
depois disso o sistema entra em regime permanente. O mesmo ocorre na Figura 18.b,
onde é mostrada a evolução no tempo do deslocamento na direção vertical, porém,
neste caso, o regime transiente perdura até que o sistema atinja t = 2500s
aproximadamente.
(a)
(b)
Figura 18 - Evolução no tempo do deslocamento para (a) direção horizontal e (b)
direção vertical.
A Figura 19 mostra o comportamento das ligas com memória de forma.
Observe que existe transformação de fase completa dos elementos de SMA
( M − ⇒ A ⇒ M + ⇒ A ) e que existe perda de energia representada pelos sublaços
de histerese, tanto na compressão quanto na tração dos elementos.
29
(a)
(b)
Figura 19 – Diagrama força x deslocamento do elemento de SMA para (a) direção
horizontal e (b) direção vertical.
A seguir é explorado o comportamento pseudoelástico das SMAs onde se
observa uma reposta periódica associada ao regime permanente do movimento do
sistema rotor-mancal. Considera-se que o sistema está à temperatura ambiente
( T = 298 K ) e que a frequência angular de forçamento é Ω = 0,5112 rad / s . Para as
condições iniciais em deslocamento são considerados nas duas direções, valores de
0,0001m, enquanto condições iniciais em velocidade são nulas.
(a)
(b)
Figura 20 - Evolução no tempo do deslocamento para (a) direção horizontal e (b)
direção vertical.
Observa-se
nas
Figuras
20.a
e
20.b
um
regime
transiente
até
aproximadamente o instante de tempo t = 3000s , tanto na direção horizontal quanto
na vertical e um regime permanente periódico. Porém, na faixa de tempo onde existe o
regime transiente, o comportamento na direção x é diferente do comportamento na
direção y, o que indica que há uma pequena interferência de uma direção sobre a
outra, caso contrário as curvas deveriam ser idênticas para ambas as direções.
30
Considerando-se um período de tempo onde exista transformação de fase, o
regime seja permanente e para o qual se tenha um trecho que represente de maneira
completa um período do comportamento do sistema dinâmico ao longo do tempo, foi
arbitrada a faixa de tempo 4941 ≤ t (s) ≤ 4954 .
Nas Figuras 21.a e 21.b são mostradas as curvas de deslocamento no tempo
com pontos importantes que são explicados em detalhe ao longo do texto. Já nas
Figuras 21.c e 21.d são mostradas as curvas força-deslocamento dos elementos de
ligas com memória de forma, para as direções (x) e (y), respectivamente. Por último,
nas Figuras 21.e e 21.f são mostradas as curvas de evolução das frações volumétricas
das fases constituintes das ligas, representadas por β n ( n = 1,2,3,4 ).
O elemento de SMA está a uma temperatura acima da qual a austenita é uma
fase estável. Na Figura 21.c, tem-se o ponto A ( t = 4941s ) que representa o início do
intervalo de tempo analisado. Para este instante de tempo, o elemento de SMA da
direção (x) se encontra numa faixa onde só existe a presença da fase M + , ou seja,
martensita induzida por tração. Com o início do descarregamento das tensões chegase ao ponto B ( t = 4943,02s ) que ainda corresponde à fase M + até que se atinja o
ponto C que representa o início da transformação de fase M + ⇒ A . Ao chegar ao
ponto D ( t = 4943,96s ), a liga só possui a fase austenítica, ( A ), e com o
descarregamento, chega-se ao ponto E, que representa o ponto no qual o anteparo de
SMA se encontra na posição de equilíbrio (sem deformação). A partir deste ponto, o
elemento começa a ser comprimido, passando pelo ponto F ( t = 4944,48s ),
alcançando, finalmente, o ponto G ( t = 4944,59s ) que representa o início da
transformação de fase A ⇒ M − . No intervalo de tempo entre os pontos G e H existe
a presença das duas frações volumétricas que representam as fases austenita e
martensita induzida por compressão ( β3 e β 2 , respectivamente). A partir do ponto H
( t = 4945,37s ), devido à presença do campo de tensões, a fase M − é estável até
atingir o ponto I, onde se dá o início do descarregamento compressivo, até que se
atinja o ponto J ( t = 4949,34s ) que representa o início da transformação inversa
M − ⇒ A , passando pelo ponto L ( t = 4950,04s ), onde existem as fases martensita
induzida por compressão e austenita ( β 2 e β3 , respectivamente).
31
(a)
(b)
(c)
(d)
(e)
(f)
Figura 21 – Evolução no tempo do deslocamento no período de tempo
4941 ≤ t (s) ≤ 4954 para (a) direção horizontal, (b) direção vertical, diagrama força x
deslocamento do elemento de SMA para (c) direção horizontal, (d) direção vertical e
evolução dos betas no tempo para (e) direção horizontal e (f) direção vertical.
Assim o ciclo se repete, e com o início do carregamento de tração atinge-se o
ponto M ( t = 4950,71s ) que é o início da transformação de fase A ⇒ M + passando
32
pelo ponto N ( t = 4951,44s ) onde há a coexistência de fases (austenita e martensita
induzida por tração) até atingir novamente um ponto próximo do ponto A.
A mesma análise pode ser feita para a direção vertical do movimento do rotor
(direção y). Considere as Figuras 21.b e 21.d. O movimento para o intervalo de tempo
escolhido se inicia no ponto A’ ( t = 4941s ), onde o elemento de SMA para a direção
(y) se encontra na fase A . À medida que o deslocamento diminui (em módulo), o
sistema alcança o ponto de equilíbrio, B’ ( t = 4941,14s ), chegando ao ponto de início
da transformação de fase A ⇒ M + , representado pelo ponto D’ ( t = 4941,49s ). Esta
transformação de fase se dá até que se atinja o ponto E’ ( t = 4942,35s ) e com o
aumento do campo de tensões chega-se ao ponto F’ ( t = 4944,25s ) que corresponde
ao ponto de máximo deslocamento positivo – associado à fase M + . A partir deste
ponto, inicia-se o descarregamento até atingir o ponto G’ onde se dá o início da
transformação inversa, M + ⇒ A , até atingir o ponto C’ relativo ao fim da
transformação M + ⇒ A e continuando-se com a descarga até que se atinja o ponto
B’ de equilíbrio do elemento de SMA. A partir do ponto de equilíbrio, se inicia a
compressão e a fase austenítica é predominante até que se atinja o ponto I’
( t = 4947,69s ), que indica o início da transformação de fase
A ⇒ M − . Esta
transformação se inicia em I’ e ocorre até o ponto J’. O carregamento compressivo
ocorre até o ponto L’ que corresponde ao ponto de máximo deslocamento negativo –
associado à fase M − . A partir de então, inicia-se o descarregamento até atingir o
ponto M’ que representa o início da transformação de fase inversa, M − ⇒ A , que
ocorre até que se atinja novamente a fase austenítica (ponto H’), passando pelo ponto
N’ ( t = 4947,69s ).
Os pontos apresentados anteriormente podem ser acompanhados (através do
tempo em que ocorrem) nas Figuras 21.e e 21.f as frações volumétricas para
confirmar os fenômenos físicos expostos. As letras que representam cada fase são:
β1 = M + , β 2 = M − , β 3 = A e β 4 = M .
A Figura 23 mostra as órbitas do espaço de fase para o intervalo de tempo
considerado ( 4941 ≤ t (s) ≤ 4954 ), destacando os pontos apresentados na explicação
anterior. As Figuras 22.a e 22.b mostram as órbitas do espaço de fase x × x ′ e y × y' ,
respectivamente. Estas órbitas mostram que o sistema oscila, para este intervalo, em
torno de um ponto de equilíbrio estável (0,0).
33
A Figura 22.c mostra o espaço de fase x × y que representa o deslocamento
do centro do rotor, onde o rotor toca no mancal ao longo de toda a trajetória de giro.
Utilizando, mais uma vez, as letras para identificar a posição do elemento de SMA, a
trajetória se inicia no ponto A e segue em sentido anti-horário. O lado direito da linha
que corta o ponto x=0 representa a parte trativa do movimento (o que pode ser
confirmado na Figura 21.c) pois englobam todos os pontos que estão associados a
este movimento físico do elemento. Já o lado esquerdo da linha que corta x=0
representa a parte da compressão do elemento. O ponto E representa a transição
entre tração e compressão.
A Figura 22.d mostra o comportamento da trajetória radial do rotor. Esta
trajetória é representada pela letra R e mostra o comportamento, em termos de
deslocamento, do centro do rotor.
(a)
(b)
(c)
(d)
Figura 22 – Órbitas do espaço de fase (a) x × x ′ , (b) y × y' , (c) x × y e (d) R × R ' .
Quando a frequência de vibração forçada do sistema é igual à frequência
natural do sistema, tem-se o fenômeno da ressonância. Um sistema oscilando na
34
frequência de ressonância vibra em grandes amplitudes devido ao armazenamento de
energia vibracional.
Quando um sistema tem frequência natural bem próxima da frequência de
vibração da força existe uma superposição de frequências, causando o fenômeno de
batimento. Considerando que o sistema rotor-mancal gire com frequência bem
próxima da frequência natural, tem-se para o sistema puramente elástico o
comportamento de batimento, o que se confirma nas Figuras 23.a e 23.b, para as
direções (x) e (y) respectivamente. Já nos casos onde o sistema possui elementos de
SMA, pela característica dissipativa deste material o batimento não ocorre para a
mesma frequência.
As Figuras 23.a e 23.b mostram a evolução no tempo do deslocamento nas
direções horizontal e vertical, na faixa de tempo 4700 ≤ t ( s ) ≤ 5000 . São simuladas
situações com diferentes temperaturas de trabalho para as ligas com memória de
forma, onde, em comparação com o sistema puramente elástico, a amplitude do
deslocamento é menor. Observa-se que com o aumento da temperatura de trabalho o
sistema rotor-mancal trabalha numa faixa elástica e com isso a resposta do sistema é,
qualitativamente, a mesma quando comparada ao sistema elástico. Para uma situação
onde a temperatura de trabalho do sistema é de T = 298K , as amplitudes de
deslocamento são menores quando comparadas com o sistema puramente elástico e,
além disso, apresenta uma resposta mais regular.
(a)
(b)
Figura 23 – Evolução no tempo do deslocamento para (a) direção horizontal e (b)
direção vertical.
A Figura 24.a mostra o comportamento do centro do rotor (R) e com isso temse que um sistema utilizando SMA, a temperatura ambiente, apresenta uma menor
variação na amplitude de vibração. A Figura 24.b mostra as órbitas do espaço de fase
35
tanto para um sistema a alta temperatura e outro trabalhando em temperatura
ambiente. Observa-se que o sistema que trabalha à temperatura ambiente responde
de uma maneira mais bem comportada quando comparada ao caso a alta
temperatura. Note que para o sistema com SMA à temperatura ambiente (T=298K),
existe um ciclo estável onde o sistema oscila, enquanto o sistema elástico gira, ora
tocando nas paredes do mancal ora não tocando. Este comportamento pode ser
observado nas Figuras 23.a e 23.b onde se vê um comportamento de batimento no
sistema elástico.
(a)
(b)
Figura 24 – (a) Evolução no tempo do R e (b) Órbitas do espaço de fase.
A Figura 25 mostra o comportamento dos elementos elástico e de SMA à
temperatura ambiente e à alta temperatura. Nota-se que o comportamento do material
elástico é análogo ao da SMA a alta temperatura, enquanto que o comportamento do
material
à
temperatura
ambiente
apresenta
perda
de
comportamento histerético apresentado em ambas as direções.
36
energia
devida
ao
(a)
(b)
Figura 25 – Diagrama força x deslocamento para (a) direção horizontal e (b) direção
vertical.
Todas as situações observadas neste estudo não apresentam amortecimento,
ficando a cargo do comportamento especial das SMA a perda de energia que pode ser
observada tanto no comportamento do deslocamento ao longo do tempo tanto no
comportamento do material nos diagramas F × x e F × y .
O comportamento não-linear da dinâmica do sistema rotor-mancal é muito rico,
onde o sistema apresenta respostas periódicas, quasi-periódicas e caóticas.
O caos é um comportamento indesejado para o sistema estudado, visto que a
dinâmica do rotor não pode ser prevista, e quando não se pode prever a resposta do
sistema, tem-se dificuldade em controlar seus efeitos. Uma das características mais
marcantes da resposta caótica é a sensibilidade às condições iniciais, ou seja, uma
pequena perturbação nas condições iniciais transforma completamente a resposta do
sistema.
Considere os dados da Tabela 6, para os quais o sistema com suporte elástico
apresenta resposta caótica, visando investigar se a utilização do elemento de SMA
modifica a natureza do comportamento do sistema.
Tabela 6 – Parâmetros do sistema rotor-mancal.
m (kg)
M (kg)
γ (m)
ρ (m)
ω (rad/s)
k (N/m)
k s (N/m)
T (K)
0,15
15
0,002
0,055
1,8
3,92
350
298
A Figura 26.a mostra que a evolução no tempo do deslocamento na direção
horizontal devida a uma pequena perturbação na condição inicial do deslocamento em
ambas as direções da ordem de 10 −6 , muda completamente. O mesmo
37
comportamento é mostrado na Figura 26.b, através das órbitas do espaço de fase do
sistema, onde é analisado y × y' , ou seja, o comportamento na direção vertical.
(a)
(b)
Figura 26 – (a) Evolução no tempo para a direção x (b) Órbitas do espaço de fase
para y × y' .
A Figura 27 mostra o comportamento do sistema utilizando elementos elásticos
através das órbitas do espaço de fase e da seção de Poincaré. Na Figura 27.a tem-se
o comportamento do sistema para a direção horizontal. Nesta figura, observa-se o
comportamento caótico do sistema através do espaço de fase que apresenta o
movimento desordenado característico do caos e é apresentada também a seção de
Poincaré associada a este movimento.
Já na Figura 27.b tem-se o comportamento do sistema onde é mostrado o
deslocamento do centro do rotor.
A Figura 27.c mostra o comportamento caótico na direção vertical e a Figura
27.d mostra o comportamento do sistema, considerando a velocidade do sistema.
38
(a)
(b)
(c)
(d)
Figura 27 – Órbitas do espaço de fase e seção de Poincaré para o sistema com
elemento elástico (a) para x × x ' , (b) para x × y , (c) y × y' e (d) x '× y' .
A Figura 28 mostra o comportamento do sistema utilizando elementos de SMA.
Através destas figuras, pode-se observar que, com a utilização das ligas com memória
de forma, o sistema responde em período-1, fornecendo um comportamento regular
onde o caos não existe.
A Figura 28.a mostra o comportamento do sistema na direção horizontal
através das órbitas do espaço de fase e da seção de Poincaré. A curva mostrada
nesta figura representa o comportamento periódico do sistema e o único ponto da
seção de Poincaré indica o período-1. A Figura 28.b mostra o deslocamento do centro
de gravidade do rotor e em comparação com a Figura 27.b pode-se observar a
complexidade do sistema caótico em relação a um sistema periódico.
A Figura 28.c mostra o comportamento do sistema utilizando os elementos de
SMA na direção vertical e a Figura 28.d mostra o comportamento do sistema,
considerando a velocidade.
39
(a)
(b)
(c)
(d)
Figura 28 – Órbitas do espaço de fase e seção de Poincaré para o sistema com
elemento elástico (a) para x × x ' , (b) para x × y , (c) y × y' e (d) x '× y' .
A Figura 29 compara a evolução no tempo do deslocamento e da velocidade
do sistema, utilizando elemento elástico e utilizando elemento de SMA.
Na Figura 29.a tem-se o deslocamento horizontal (direção x) no tempo. Note
que o sistema que utiliza o elemento elástico tem comportamento caótico enquanto o
sistema que utiliza o elemento de SMA apresenta comportamento harmônico de
período-1. A mesma análise pode ser feita na Figura 29.c que mostra a evolução no
tempo do deslocamento na direção vertical, y, onde o sistema que utiliza o elemento
de SMA apresenta resposta de período-1.
A Figura 29.b mostra o comportamento da velocidade na direção x. Note que a
velocidade apresenta curva defasada de noventa graus em relação à curva de
deslocamento. A Figura 29.d mostra o comportamento da velocidade na outra direção,
y, e pode-se observar que o sistema elástico apresenta comportamento caótico
enquanto que o sistema que utiliza elemento de SMA apresenta comportamento
periódico.
40
As Figuras 29.e e 29.f mostram o comportamento do centro do rotor, onde a
primeira representa o deslocamento e a segunda representa a velocidade. Note que o
comportamento caótico do sistema elástico confere altas amplitudes de deslocamento
do centro, enquanto o sistema utilizando SMA apresenta uma resposta bem mais
comportada.
(a)
(b)
(c)
(d)
(e)
(f)
Figura 29 – Evolução no tempo (a) do deslocamento horizontal, (b) da velocidade na
direção horizontal, (c) do deslocamento vertical, (d) da velocidade na direção
vertical, (e) do centro do rotor e (f) da velocidade do centro do rotor.
41
A Figura 30.a mostra o espectro de frequência do sistema com elemento
elástico para a direção x, onde a energia é distribuída por uma faixa grande de
frequências. Já a Figura 30.b mostra o espectro do sistema com elemento de SMA.
Note que esta apresenta apenas um pico na frequência de excitação do sistema.
A Figura 30.c mostra o espectro de frequência do sistema com elemento
elástico para a direção y, e mais uma vez a energia é distribuída por uma faixa
extensa de frequência, enquanto que na Figura 30.d é mostrado o espectro de
frequência para o sistema com SMA, onde, mais uma vez, só existe um pico, que
representa a excitação do sistema.
(a)
(b)
(c)
(d)
Figura 30 – Espectro da frequência para (a) direção x do sistema elástico, (b) direção x
do sistema com SMA, (c) direção y do sistema elástico e (d) direção y do
sistema com SMA.
O efeito da utilização das ligas com memória de forma se mostra
extremamente eficiente quando são apresentados os parâmetros anteriormente
estudados, e que a dissipação interna das ligas é uma condição importante para a
manutenção da reposta periódica nos casos estudados.
42
Na próxima seção discute-se a influência da assimetria tração-compressão das
SMA’s na resposta dinâmica do sistema rotor-mancal.
4.3 Efeito da assimetria tração-compressão
Nesta seção é discutida a influência da assimetria tração-compressão dos
elementos de SMA na reposta dinâmica do sistema e é feita uma comparação com o
caso elástico.
A Tabela 7 mostra os parâmetros físicos do sistema rotor-mancal e a Tabela 8
mostra as propriedades físicas dos elementos de SMA que apresentam assimetria
tração-compressão. Para este caso, o amortecimento é nulo no sistema rotor-mancal
para que seja realçado o efeito da dissipação histerética dos elementos de SMA.
Tabela 7 – Parâmetros do sistema rotor-mancal.
m (kg)
M (kg)
γ (m)
ρ (m)
ω (rad/s)
k (N/m)
k s (N/m)
T (K)
0,15
15
0,002
0,055
1,8
3,92
2,867
298
Tabela 8 – Propriedades das SMAs com assimetria.
E A (GPa)
E M (GPa)
α T (MPa)
α C (MPa)
εR
L 0 (MPa)
54
42
50
90
0,0555
0,15
L (MPa)
LA0 (MPa)
LA (MPa)
Θ A (MPa/K)
Θ M (MPa/K)
η L (MPa.s)
4,0
6,3
165
0,74
0,17
5,0
η U (MPa.s)
η LA (MPa.s)
η UA (MPa.s)
TA (K)
TM (K)
T0 (K)
5,0
2,0
2,0
222,5
201,4
298,0
A seguir, é mostrado que, para as condições definidas nas Tabelas 7 e 8, o
sistema que apresenta assimetria tração-compressão se comporta de maneira bem
diferente de um sistema simétrico. Um sistema de característica simétrica apresenta
uma resposta bem mais regular quando comparado a um sistema assimétrico e
também a um sistema elástico. Nota-se que a assimetria modifica a dinâmica do
43
sistema, pois o sistema se comporta de maneira distinta na tração e na compressão,
visto que para a tração o sistema perde mais energia que na compressão.
A Figura 31 mostra o comportamento do deslocamento ao longo do tempo nas
duas direções de interesse. Na Figura 32.a, tem-se a comparação entre os casos
elástico, com elementos de SMA simétricos e com elementos de SMA assimétricos na
tração-compressão. O sistema com elemento elástico apresenta, ao longo do tempo,
um ganho de energia enquanto ambos os sistemas com elementos de SMA
apresentam dissipação de energia. Neste caso nota-se que o elemento de SMA com
simétrica tração-compressão apresenta-se de maneira bem mais comportada em
relação aos outros dois casos.
(a)
(b)
Figura 31 – Evolução no tempo para deslocamento (a) em x e (b) em y.
Na Figura 31.b, tem-se a evolução no tempo do deslocamento na direção y,
onde os outros dois casos perdem energia juntamente com o sistema elástico. No
entanto, onde existe a presença dos elementos de SMA, o sistema se comporta de
forma mais regular, acompanhando a amplitude de vibração apresentada para a
direção x.
Foi escolhido o intervalo de tempo 4950 ≤ t (s) ≤ 5000 para mostrar de maneira
mais detalhada o comportamento do deslocamento nas duas direções para o sistema
rotor-mancal. Note que na Figura 32.a o sistema elástico apresenta amplitudes
maiores de vibração em comparação com os outros dois casos, e que o sistema
simétrico é mais regular quando comparado com o caso assimétrico.
44
(a)
(b)
Figura 32 – Evolução no tempo para deslocamento no intervalo 4950 ≤ t (s) ≤ 5000
(a) em x e (b) em y.
Na Figura 32.b nota-se que o comportamento do sistema elástico se
assemelha aos casos com SMA, que se apresentam com amplitudes de vibrações
menores.
A Figura 33 mostra como o sistema dissipa energia. Essa dissipação pode ser
observada nos gráficos de força-deslocamento onde se apresentam os laços de
histerese. Nas Figuras 33.a e 33.b, é feita uma comparação entre o comportamento de
um sistema utilizando elementos de SMA com comportamento simétrico e assimétrico.
(a)
(b)
Figura 33 – Diagrama força x deslocamento do elemento de SMA para (a) direção
horizontal e (b) direção vertical.
Considere os dados da Tabela 5 e da Tabela 8, onde a primeira está associada
à resposta simétrica tração-compressão e a segunda à resposta assimétrica. Da
Tabela 8 os dados correspondentes ao parâmetro de dissipação interna η L
45
(associado à martensita não-maclada induzida por tensão que controla a
transformação martensítica) e η U (parâmetro de dissipação interna associado à
martensita não-maclada induzida por tensão que controla a transformação inversa)
foram modificados para 8,0 MPa.s a fim de se explorar novos comportamentos para o
caso com assimetria.
As Tabelas 9 e 10 mostram, respectivamente, os dados geométricos e
estruturais do sistema assim como os parâmetros utilizados no sistema rotor-mancal.
Tabela 9 – Dados geométricos e estruturais do elemento de SMA.
D (m)
d (m)
N
k s (N/m)
0,009
0,000916
5
350
J p (m4)
k (N/m)
d eixo (m)
M (kg)
9,81 x 10-10
3,92
0,01
15
A Tabela 10 mostra que a rigidez associada ao mancal é aumentada da ordem
de 103 e esta mudança influencia na resposta do sistema assimétrico que passa a
responder de maneira caótica, enquanto o sistema simétrico se comporta de maneira
harmônica de período-1.
Tabela 10 – Parâmetros do sistema rotor-mancal.
m (kg)
M (kg)
γ (m)
ρ (m)
0,15
15
0,002
0,055
ω (rad/s) k (N/m)
1,8
3,92
k s (N/m)
T (K)
350
298
A Figura 34.a mostra que, para a direção x, o sistema rotor-mancal passa da
resposta periódica para a caótica com a modificação dos parâmetros que controlam o
mecanismo de tração-compressão, onde o sistema simétrico responde de maneira
comportada, enquanto o sistema assimétrico apresenta comportamento caótico. Esta
mesma análise pode ser feita observando o comportamento da curva apresentada na
Figura 34.b que representa o deslocamento do rotor na direção y.
46
(a)
(b)
Figura 34 – Evolução no tempo para deslocamento (a) em x e (b) em y.
A Figura 35.a mostra as órbitas do espaço de fase para os sistemas com
elementos de SMA simétrico e assimétrico. A órbita fechada (em preto) mostra o
comportamento do sistema simétrico, enquanto o comportamento assimétrico está
demonstrado na outra curva (em vermelho). Neste caso, tem-se que o sistema rotormancal utilizando elemento de SMA com comportamento simétrico, após um regime
transiente, se estabiliza numa órbita estável de período-1 enquanto que o mesmo
sistema utilizando elementos de ligas com características assimétricas se comporta de
maneira tipicamente caótica. Na Figura 35.b têm-se as órbitas do espaço de fase para
x × y , onde se observa o movimento do centro do rotor. Mais uma vez, nota-se que o
comportamento do sistema utilizando os elementos de ligas com comportamento
simétrico apresentam vantagens significativas em relação ao sistema que utiliza estas
ligas assimétricas. A órbita fechada (em preto) mostra o comportamento de período-1.
(a)
(b)
Figura 35 – Órbitas do espaço de fase para (a) x × x ' e (b) x × y .
47
Para mostrar outra característica importante do caos no sistema rotor-mancal
com elementos de SMA assimétricos, tem-se a Figura 36 que mostra as órbitas do
espaço de fase com comportamento caótico e a seção de Poincaré associada a este
comportamento. A Figura 36.a mostra o comportamento do ponto de vista da
velocidade do sistema, enquanto a Figura 36.b mostra comportamento do ponto de
vista do movimento na direção y. Em ambos os casos tem-se a presença das órbitas
desordenadas.
(a)
(b)
Figura 36 – Órbitas do espaço de fase e seção de Poincaré para (a) x '× y' e (b) y × y' .
A Figura 37 mostra o espectro de frequência para o sistema com resposta
periódica e para o sistema com resposta caótica. A Figura 37.a mostra que o espectro
de frequência para a direção x apresenta apenas um pico que representa a frequência
de excitação do sistema, enquanto a Figura 37.b mostra o espectro para o sistema
com comportamento caótico. Note que a energia é distribuída por uma faixa de
frequência e que não apresenta apenas um pico em destaque conforme o caso
periódico.
A Figura 37.c mostra o comportamento do sistema rotor-mancal utilizando as
SMA com comportamento tração-compressão simétrico e a Figura 37.d mostra o
comportamento do sistema rotor-mancal utilizando elementos de SMA com
comportamento assimétrico.
48
(a)
(b)
(c)
(d)
Figura 37 – Espectros de frequência para (a) Resposta simétrica na direção x (b)
Resposta assimétrica na direção x, (c) Resposta simétrica na direção y e (d)
Resposta assimétrica na direção y.
4.4 Efeito do amortecimento externo
Nesta seção são apresentados os resultados do sistema rotor-mancal sob a
influência do amortecimento viscoso associado ao eixo do rotor, que pode representar
diversos fenômenos dissipativos como o amortecimento estrutural e a viscosidade dos
fluidos lubrificantes.
Os resultados apresentados são gerados, utilizando os dados da Tabela 10, e
revelam que o sistema utilizando elementos elásticos possui comportamento dinâmico
bastante complexo onde existe comportamento tipicamente caótico na faixa
0 ≤ c ( N.s / m) ≤ 0,03 , e periódico de período-1 a partir de c > 0,03 N.s / m . Com isso,
conclui-se que o aumento do amortecimento tende a estabilizar o comportamento do
sistema rotor-mancal em órbitas periódicas.
49
Já no sistema utilizando elementos de SMA, o sistema oscila sempre em
órbitas periódicas, para a faixa de amortecimento analisada, não apresentando a
complexidade exposta anteriormente para o sistema elástico. Este resultado
demonstra que a resposta deste sistema é indiferente à variação do coeficiente de
amortecimento para esta faixa.
A Figura 38 mostra a evolução do deslocamento do rotor no tempo para
c = 0,002 N.s/m. O sistema utilizando elemento elástico se comporta de maneira
caótica tanto na direção x quanto na direção y, enquanto o sistema utilizando
elementos de SMA se comporta de maneira periódica de período-1.
(b)
(b)
Figura 38 – Evolução no tempo do deslocamento para (a) direção x e (b) direção y.
A Figura 39 mostra as órbitas do espaço de fase para a direção x (Figura 39.a)
e para o deslocamento do centro do rotor (Figura 39.b). Note que o sistema que utiliza
elemento de SMA apresenta apenas uma órbita estável de período-1 enquanto o
sistema que utiliza elementos elásticos apresenta uma órbita caótica, representadas
por uma curva que nunca se fecha devido à imprevisibilidade do comportamento.
50
(a)
(b)
Figura 39 – Espaço de fase para (a) x × x ' e (b) x × y utilizando c = 0,002 N.s / m .
Na Figura 40.a é mostrado o comportamento periódico para o sistema que
utiliza os elementos de SMA. O ponto único mostrado na figura mostra que o sistema
é de período-1.
A Figura 40.b mostra o espaço de fase x × y tipicamente caótico e a seção de
Poincaré associada a este espaço de fase.
(a)
(b)
Figura 40 – Espaço de fase e seção de Poincaré para (a) y × y' utilizando SMA e (b)
y × y' utilizando elemento elástico utilizando c = 0,002 N.s / m .
A Figura 41 mostra o espectro de frequência para o comportamento caótico
(Figura 41.a) e para o comportamento periódico (Figura 41.b).
51
(a)
(b)
Figura 41 – Espectro de frequência utilizando c = 0,002 N.s / m para (a) direção x
utilizando elemento elástico e (b) direção x utilizando elemento de SMA.
Considerando, agora, o coeficiente de amortecimento (c) igual a 0,05 N.s / m ,
tem-se a modificação completa da resposta do sistema que utiliza os elementos
elásticos, onde o comportamento caótico dá lugar a um comportamento harmônico de
período-1. A Figura 42.a mostra a história no tempo do deslocamento em x. Note que
enquanto o sistema utilizando elementos de SMA já atingiu o regime permanente, o
sistema utilizando elemento elástico ainda está em regime transiente. Este fato se
deve ao comportamento histerético das SMA, conferindo dissipação de energia ao
sistema (além do amortecimento). Na Figura 42.b é mostrado o comportamento do
sistema em regime permanente para 4950 < t (s) < 5000. É importante notar que o
sistema que utiliza elemento elástico apresenta menor amplitude de deslocamento,
entretanto, o fato importante a se destacar é que o sistema utilizando elementos de
SMA apresenta-se em regime permanente desde t=50s aproximadamente.
(a)
(b)
Figura 42 – Evolução no tempo do deslocamento em x utilizando c = 0,05 N.s / m para
(a) direção x considerando regime transiente e (b) direção x considerando
regime permanente.
52
A mesma análise apresentada anteriormente serve para descrever o
comportamento mostrado na Figura 43. A Figura 43.a mostra a história no tempo do
deslocamento em (y), considerando regime transiente, enquanto a Figura 43.b mostra
o comportamento do sistema na direção y em regime permanente.
(a)
(b)
Figura 43 – Evolução no tempo do deslocamento em y utilizando c = 0,05 N.s / m para
(a) direção x considerando regime transiente e (b) direção x considerando
regime permanente.
O efeito dos elementos de SMA se mostra especialmente importante nas
análises deste parâmetro, revelando que a dissipação interna do elemento de SMA é
suficiente para a manutenção da resposta periódica nos casos estudados.
53
5. Considerações Finais
As máquinas rotativas são constituídas de sistemas rotor-mancal, e estes
sistemas desbalanceados apresentam problemas que notadamente são grandes
fontes de quebras neste tipo de equipamento. Estes desbalanceamentos podem
provocar toques entre o eixo do rotor e as paredes do mancal (rubbing) que são fontes
de não-linearidades e consequentemente provocam respostas muito difíceis de
controlar. Além disso, as altas amplitudes de deslocamento provenientes deste
desbalanceamento produzem forças indesejáveis na dinâmica do sistema, que podem
apresentar problemas de desgaste e até mesmo quebras.
O objetivo deste trabalho é atestar o potencial das ligas com memória de forma
para serem empregadas na redução de vibrações em sistemas rotativos que utilizam
conjuntos do tipo rotor-mancal. O trabalho contempla quatro modelos para representar
este sistema – a saber: dois modelos com um grau de liberdade (um com suporte
elástico e outro com SMA) e dois modelos com dois graus de liberdade (um com
suporte elástico e outro com SMA). Os três primeiros modelos, apresentados no
Capítulo 3, visam a verificação do código computacional, através da comparação com
resultados numéricos existentes na literatura. Os resultados obtidos neste trabalho
estão coerentes com aqueles pesquisados na literatura. Para demonstrar a
capacidade de dissipação intrínseca da SMA’s, comparam-se os resultados obtidos
para o modelo com dois graus de liberdade utilizando suportes de SMA no mancal
com outro utilizando suportes elásticos lineares.
A análise do novo modelo proposto com dois graus de liberdade e mancais de
SMA é baseada no fenômeno pseudoelástico das ligas (ou seja, são conduzidos
apenas ensaios à alta temperatura para a qual a fase austenítica é estável fora da
presença de tensões). Inicialmente, considera-se um caso de vibração livre e sem
amortecimento, onde apenas o efeito histerético das ligas é responsável pela
dissipação de energia. Verifica-se que o sistema perde energia, tendendo para um
movimento com amplitude constante associada ao regime elástico da fase austenítica.
Ensaios a diferentes temperaturas são propostos, para os quais se verifica a variação
inversa da dissipação com a temperatura.
A seguir, discutem-se os casos sem amortecimento e com vibração forçada
harmônica devido a um desbalanceamento do rotor. Em todas as situações, o sistema
com SMA apresenta uma resposta mais regular que o sistema elástico em regime
permanente. Nesta seção, cabe destacar a possibilidade de atuação através da
54
variação de temperatura sobre os elementos de SMA, alterando suas propriedades e,
consequentemente, modificando a resposta dinâmica do sistema.
Na seção seguinte, assume-se uma assimetria do elemento de SMA no
comportamento à tração e à compressão. Os resultados mostram que o grau de
assimetria do elemento de SMA (função da composição química de cada liga)
proporciona diferentes níveis de dissipação, alterando radicalmente a natureza do
comportamento dinâmico do sistema, podendo variar de periódicos a caóticos. Este é
mais um aspecto que confere uma flexibilidade à utilização das SMA’s, de acordo com
cada aplicação.
Por fim, introduz-se um amortecimento viscoso linear no sistema, mantendo-se
a vibração forçada harmônica. Novamente, os resultados mostram que, para a
condição assumida, o sistema apresenta uma resposta mais regular para o caso com
anteparo de SMA, comparada à resposta com anteparo elástico. Além disso, em
situações onde ambas as respostas são periódicas, o sistema com SMA alcança o
regime permanente mais rapidamente que o sistema elástico, devido à presença de
duas fontes de dissipação: o amortecimento viscoso linear e a dissipação intrínseca do
elemento de SMA.
As simulações apresentadas caracterizam o potencial de aplicação do efeito
pseudoelástico das ligas SMA como uma forma de controle passivo de sistemas
dinâmicos. Dentre as principais vantagens de utilização das SMA’s sobre materiais
elásticos convencionais, é possível destacar:
• A escolha da liga permite variar propriedades como: deformação residual
máxima, tensão crítica para transformação de fase; energia dissipada
associada ao laço de histerese; assimetria; entre outras, de acordo com a
aplicação.
Lembrando
desenvolver/recuperar
que
as
índices
de
ligas
SMA
deformação
são
ordens
capazes
de
de
grandeza
superiores a materiais elásticos convencionais;
• Devido à característica adaptativa do material, é possível controlar o nível de
dissipação em função da temperatura para uma mesma liga;
• Dentro do contexto de aplicações dinâmicas, a riqueza de comportamentos,
função da natureza não-linear intrínseca das ligas, permite a utilização de
técnicas de controle não-linear, onde é possível efetuar o controle através
de pequenas perturbações no sistema.
Com isso a versatilidade deste material nas aplicações de engenharia é
mostrada, onde já são conhecidas suas aplicações na área naval, ortodôntica,
aparelhos cardíacos, válvulas de controle de temperatura e até mesmo vestuário. A
análise dinâmica do sistema revela que a aplicação destas ligas oferece boas
55
alternativas no desenvolvimento de sistemas passivos de controle de vibração mais
eficientes, capazes de dissipar energia de forma inteligente.
Como proposta de trabalhos futuros, sugere-se a aplicação do efeito memória
de forma no controle ativo de vibrações em sistemas mecânicos, fazendo com que o
sistema tenha um controle instantâneo de temperatura que corrija os comportamentos
indesejados e torne a resposta do sistema regular. Sugerem-se ainda, o estudo
dinâmico deste sistema experimentalmente, através de um protótipo a fim de verificar
o efeito histerético das ligas com memória de forma em sistemas rotor-mancal.
56
6. Referências Bibliográficas
ABEYARATNE, R., KIM, S.J. & KNOWLES, J.K., 1994, “Continuum Modeling of
Shape Memory Alloys”, Mechanics of Phase Transformations and Shape Memory
Alloys, ASME, pp. 59-69.
ACHENBACH, M. & MÜLLER, I.A., 1982, “A Model for Shape Memory”, Journal
de Physique, Vol.12, No. 43, pp. 163-167.
AL-BEDOOR, B.O., 2000, “Transient torsional and lateral vibrations of
unbalanced rotors with rotor-to-stator rubbing.” ,Journal of Sound and Vibration, pp
627-645.
ANDERS, W.S., ROGERS, C.A. & FULLER, C.R., 1992, “Vibration and Lowfrequency Acoustic Analysis of piecewise-activated Adaptive Composite Panels”,
Journal of Composite Materials, Vol. 26, pp. 103-120.
AURICCHIO, F., TAYLOR, R. L. & LUBLINER, J., 1997, “Shape-Memory
Alloys: Macromodeling and Numerical Simulations of the Superelastic Behavior”,
Computer Methods in Applied Mechanics and Engineering, Vol. 146, No. 3-4, pp. 281312.
BERVEILLER, M.; PATOOR, E. & BUISSON, M., 1991, “Thermomechanical
Constitutive Equations for Shape Memory Effects in Alloys”, Journal de Physique IV,
Vol. 1, pp. 387-396.
BIRMAN, V., 1997, “Review of Mechanics of Shape Memory Alloys Structures”,
Applied Mechanics Review, Vol. 50, No. 11, pp. 629-645.
BOYD, J.G. & LAGOUDAS, D.C., 1996, “Thermodynamic Constitutive Model for
the Shape Memory Materials – Part I: The Monolithic Shape Memory Alloys”,
International Journal of Plasticity, Vol. 12, No. 6, pp. 805-842.
BRINSON, L.C., 1993, “One Dimensional Constitutive Behavior of Shape
Memory Alloys: Thermomechanical Derivation with Non-constant Material Functions
and Redefined Martensite Internal Variable”, Journal of Intelligent Material Systems
and Structures, No. 4, pp. 229-242.
BUEHLER, W.J. & WILEY, R.C., 1965, “Nickel-Based Alloys”, Technical Report.
CHOY, F.K., PADOVAN, J.,1987, “Nonlinear transient analysis of rotor-casing
rub events”, Journal of sound and Vibration 113, pp 529-545.
COMSTOCK Jr., R.J., BUCHHEIT, T.E., SOMERDAY, M. & WERT, J.A., 1996,
“Modeling the transformation Stress of Constrained Shape Memory Alloys Single
Crystals”, ACTA Materialia, Vol. 44, No. 9, pp. 3505-3514.
DUERIG, T.M.; PELTON, A. & STÖCKEL, D. 1999, “An Overview of Nitinol
57
Medical Applications”, Materials Science and Engineering, A273-275, pp. 149-160,.
EDWARDS, S., LEES, A.W., FRISWELL, M.I., 1999, “The influence of torsion
on rotor/stator contact in a rotating machinery”, Journal of Sound and Vibration, pp
767-778.
ENTCHEV P.B. & LAGOUDAS D.C., 2002, “Modeling Porous Shape Memory
Alloys Using Micro-Mechanical Averaging Techniques”, Mechanics of Materials, Vol.
34, No. 1, pp. 1-24.
FALK, F., 1983, “One-Dimensional Model of Shape Memory Alloys”, Arch.
Mech., No. 35, pp. 63-84.
FERNANDES, F.M.B., 2006, “Ligas com memória de forma”, Departamento de
Ciências dos Materiais, Universidade Nova de Lisboa, Portugal.
FISCHER, F.D. & TANAKA, K., 1992, “A Micromechanical Model for The
Kinetics of Martensitic-Transformation”, International Journal of Solids and Structures,
Vol. 29, No. 14-15, pp. 1723-1728.
FREMOND,
M.,
1996,
“Shape
Memory
Alloy:
A
Thermomechanical
Macroscopic Theory”, CISM Courses and Lectures, No. 351, pp. 3-68.
FUNAKUBO, H., 1987, “Shape Memory Alloys”, Gordon & Bleach, New York.
GALL, K., SEHITOGLU, H., CHUMLYAKOV, Y.I. & KIREEVA, I.V., 1999,
“Tension-Compression Asymmetry of the Stress-Strain Response in Aged Single
Crystal and Polycrystalline Ni-Ti”, ACTA Materialia, Vol. 47, No. 4, pp. 1203-1217.
GANESAN, R., 1996, “Dynamic response and stability of a rotor-support system
with non-symmetric bearing clearances”, Mechanism and machine Theory, pp 781-798.
GONSALVES, D.H., NEILSON, R.D., BARR, A.D.S., 1995, “A study of
response of a discontinuously nonlinear rotor system.”, Nonlinear dynamics, pp 70-451.
GOVINDJEE, S. & KASPER, E.P., 1997, “A Shape Memory Alloy Model for
Uranium-Niobium Accounting for Plasticity”, Journal of Intelligent Material Systems and
Structures, Vol. 8, pp. 815-826.
HERZOG, H.; JACQUET, E., 2007, “From a Shape Memory Alloys Model
Implementation to a Composite Behavior”, Computational Material Science, pp. 365375.
HODGSON, D.E. & BROWN, J.W., 2000, “Using Nitinol Alloys”, Shape Memory
Applications INC, 44 pp.
JEFFCOTT, H.H.,1919, “The lateral vibration of loaded shifts in the
neighborhood of a whirling speed – the effects of want of balance.”, Philosophical
Magazine Series 6, pp 304-314.
KLOUCEK, P., REYNOLDS, D.R. & SEIDMAN, T.I., 2004, “Computational
58
Modeling of Vibration Damping using SMA Wires”, Continuum Mechanics and
Thermodynamics, Vol.16, No. 5, pp.495-514.
LAHA, S.K., KAKOTY, S.K., 2011, “Non-linear Dynamic Analysis of a Flexible
Rotor Supported on Porous Oil Journal Bearing”, Common Nonlinear Sci Numer
Simulat 16, pp 1617-1631.
LECLERCQ, S., BOURBON, G. & LEXCELLENT, C., 1995, “Plasticity Like
Model of Martensite Phase Transition in Shape Memory Alloys”, Journal de Physique
IV, Vol. 5, pp. 513-518.
LEES, A. W., 2011, “Smart Machines with Flexible Rotors”, Mechanical
Systems and Signal Processing 25, pp. 373-382.
LEMAITRE, J.; CHABOCHE, J.L., 1990, “Mechanics of Solid Materials”,
Cambridge University Press.
LEVITAS, V.I., IDESMAN, A.V., STEIN, E., SPIELFELD, J. & HORNBOGEN,
E., 1998, “A Simple Micromechanical Model for Pseudoelastic Behavior of CuZnAl
Alloy”, Journal of Intelligent Material Systems and Structures, No. 5, pp. 324-334.
LIANG, C. & ROGERS, C.A., 1990, “One-Dimensional Thermomechanical
Constitutive Relations for Shape Memory Materials”, Journal of Intelligent Material
Systems and Structures, No.1, pp.207-234.
LU, Z.K. & WENG, G.J., 1998, “A Self-Consistent Model for the Stress-Strain
Behavior of Shape Memory Alloy Polycrystals”, ACTA Materialia, Vol. 46, No. 15, pp.
5423-5433.
LUO, G. W., LV, X. H., 2009, “Controlling bifurcation and chaos of a plastic
impact oscillator.”, Nonlinear Analysis: Real World Applications, pp 2047-2061.
MA. L., LUO, G., LV, X., 2009, “Dynamic analysis and suppressing chaotic
impacts of a two-degree-of-freedom oscillator with a clearance.”, Nonlinear Analysis:
Real World Applications, pp 756-778.
MACHADO, L.G. & SAVI, M.A., 2002, “Aplicações Odontológicas das Ligas
com Memória de Forma”, Revista Brasileira de Odontologia, Vol.59, No.5, pp. 302-306.
MACHADO, L.G. & SAVI, M.A., 2003, “Medical Applications of Shape Memory
Alloys”, Brazilian Journal of Medical and Biological Research, Vol. 36, No. 6, pp. 683691.
MANTOVANI, D., 2000, “Shape Memory Alloys: Properties and Biomedical
Applications”, Journal of the Minerals Metals & Materials Society, Vol. 52, No. 10, pp.
36-44.
MEIROVITCH, L., 1986, “Elements of Vibration Analysis”, McGraw-Hill Book
Company, 560 pp.
59
MULLER, I. & SEELECKE, S., 2001, “Thermodynamic Aspects of Shape
Memory Alloys”, Mathematical and Computer Modeling, Vol. 34, pp. 1307-1355.
MUSZYNSKA, A., GOLDMAN, P.,1995 , “Chaotic responses of unbalanced
rotor/bearing/stator systems with looseness or rubs.”, Chaos Solitons & Fractals, pp
1683-1704.
NISHIYAMA, Z., 1978, “Martensitic Transformation”, Academic Press, New
York.
ORTIZ, M.; PINSKY, P. M.; TAYLOR, R. L. , 1983, “Operator Split Methods for
the Numerical Solution of the Elastoplastic Dynamic Problem”. Computer Methods of
Applied Mechanics and Engineering, 39. pp.137-157.
OTSUKA, K. & REN, X., 1999, “Recent Developments in the Research of
Shape Memory Alloys”, Intermetallics, No. 7, pp. 511-528.
PACHECO, P.M.C.L. & SAVI, M.A., 1997, “A Non-Explosive Release Device for
Aerospace Applications Using Shape Memory Alloys”, XIV Brazilian Mechanical
Engineering Congress.
PAIVA, A. & SAVI, M.A., 2006, “An Overview on Constitutive Models for Shape
Memory Alloys”, Mathematical Problems in Engineering, Article ID 56876, pp. 1-30.
PAIVA, A., SAVI, M.A., PACHECO, P.M.C.L. & BRAGA, A.M.B., 2005, “A
Constitutive Model for Shape Memory Alloys Considering Tensile-Compressive
Asymmetry and Plasticity”, International Journal of Solids and Structures, Vol. 42, pp.
3439-3457.
PATEL, T.H., DARPE, A.K., 2008, “Vibration response of a cracked rotor in
presence of rotor-stator rub”, Journal of Sound and Vibration, pp 841-865.
PERKINS, J., 1975, “Shape Memory Effects in Alloys”, Plenum Press, New
York.
REDINIOTIS, O.K., WILSON, L.N., LAGOUDAS, D.C. & KHAN, M.M., 2002,
“Development of a Shape-Memory-Alloy Actuated Biomimetic Hydrofoil”, Journal of
Intelligent Material Systems and Structures, Vol. 13, No. 1, pp. 35-49.
ROGERS, C.A., 1995, “Intelligent Materials”, Scientific American, pp. 122-127.
RYHÄNEN, J., 1999, “Biocompatibility Evolution of Nickel-Titanium Shape
Memory Alloy”. Dissertação de Mestrado, University of Oulu, Faculty of Medicine.
SANTOS, B.C., SAVI, M.A., 2009, “Nonlinear dynamics of a nonsmooth shape
memory alloy oscillator”, Chaos, Solitons & Fractals 40, pp. 197-209.
SAVI, M. A.; BRAGA, A. M., 1993, “Chaotic Vibration of an Oscillator with
Shape Memory”, Journal of the Brazilian Society of Mechanical Science, 15 (1): pp. 120.
60
SAVI, M.A, DIVENYI, S.,FRANCA, L.F.P., WEBER, H.I., 2007, “Numerical and
experimental investigations of the nonlinear dynamics and chaos in non-smooth
systems”, Journal of Sound and Vibration 301, pp 59-73.
SAVI, M.A., 2006, Dinâmica não-linear e Caos. 1ª ed. Rio de Janeiro, Ed. Epapers.
SAVI, M.A., DIVENYI, S., FRANCA, L.F.P. et al., 2006, “Nonlinear dynamics
and chaos in systems with discontinuous support”, Shock and Vibration 13, pp 315326.
SCHWEIZER, B., SIEVERT, M., 2009, “Nonlinear oscillations of automotive
turbocharger turbines.”, Journal of Sound and Vibration, pp 955-975.
SHANG, Z., JIANG, J. & HONG, L., 2011, “The global responses characteristics
of a rotor/stator rubbing system with dry friction effects”, Journal of Sound and Vibration
330, pp. 2150-2160.
SHIGLEY, J.E, 2006, “Mechanical Engineering Design”, Editora Mc Graw Hill,
8ª edição.
SILVA, E.P., 1995, “Modelagem Mecânica de Transformações de Fase
Induzidas por Tensões em Sólidos”, Dissertação de Mestrado, Departamento de
Engenharia Mecânica, UNB – D.F, Brasil.
SITNIKOVA, E., PAVLOVSKAIA, E., WIERCIGROCH, M. & SAVI, M.A., 2010,
“Vibration reduction of the impact system by an SMA restraint: numerical analysis”,
International Journal of Nonlinear Mechanics 45, pp 837-849.
SITTNER, P. & NOVÁK, V., 2000, “Anisotropy of Martensitic Transformations in
Modeling of Shape Memory Alloy Polycrystals”, International Journal of Plasticity, Vol.
16, pp. 1243-1268.
SOUZA, A.C., MAMIYA, E. & ZOUAIN, N., 1998, “Three-Dimensional Model for
Solids Undergoing Stress-Induced Phase Transformations”, European Journal of
Mechanics - A Solids, No. 17, pp. 789-806.
SUDHAKAR, G. N. D. S & SEKHAR, A. S., 2011, “Identification of Unbalance in
a Rotor Bearing System”, Journal of Sound and Vibration 330, pp. 2299-2313.
SUN, Q.P. & HWUANG, K.C., 1993, “Micro-Mechanics Modeling for the
Constitutive Behavior of Polycrystalline Shape memory Alloys – Part I: Derivation of
General Relations”, Journal of the Mechanics and Physics of Solids, Vol. 41, pp. 1-18.
TANAKA, K.; NAGAKI, S., 1982, “Thermomechanical Description of Materials
with Internal Variables in the Process of Phase Transformation”. Ingenieur – Archiv.,
51, pp. 287-299.
VON GROLL, G., EWINS, D.J., 2001, “The Harmonic balance method with arc-
61
length continuation in rotor/stator contact problems”, Journal of sound and Vibration, pp
223-233.
WARLIMONT, H., 1974, “Thermoelasticity, Pseudoelasticity and the Memory
Effects Associated with Martensitic Transformations - Part 3: Thermodynamics and
Kinetics.”, Journal of Materials Science 9, pp. 1545-1555.
WENHUI, X., YOUGANGA, T., CHEN YUSHUB C., 2008, “Analysis of motion
stability of the flexible rotor-bearing system with two unbalanced disks.”, Journal of
Sound and Vibration, pp 381-393.
WIERCIGROCH, M., KARPENKO, E.V., CARTMELL, M.P., 2002, “Regular and
chaotic dynamics of a discontinuously nonlinear rotor system”, Chaos Solitons &
Fractals, pp 1231-1242.
WIERCIGROCH, M., KARPENKO, E.V., PAVLOVSKAIA, E.E., CARTMELL,
M.P., 2002, “Piecewise approximate analytical solutions for a Jeffcott rotor with a
snubber ring”, International Journal of Mechanical Sciences. pp 475-488.
WIERCIGROCH,
M.,
KARPENKO,
E.V.,
PAVLOVSKAIA,
E.E.,
2003,
“Bifurcation analysis of a preloaded Jeffcott rotor.”, Chaos Solitons & Fractals, pp 407416.
WU, S. K.; LIN, H. C., 2000, ”Recent Development of Ni-Ti-Based Shape
Memory Alloys in Twain.”, Materials Chemistry and Physics, 64. pp. 81-92.
YAO, G.Z., QIU, Y., MENG, G. et al., 1999, “Vibration control of a rotor system
by disk type electrorheological damper”, Journal of Sound and Vibration, pp. 175-188.
ZENG, S. WANG X, 1999, “The influence of the electromagnetic balancing
regulator on the rotor system”, Journal of Sound and Vibration, pp 723-729.
ZHANG, S., McCORMICK, P.G., 2000, “Thermodynamic Analysis of Shape
Memory Phenomena — II. Modelling”, Acta Materialia, Volume 48, Issue 12,
pp.3091-3101.
ZHANG, Y, WEN, B., LEUNG, A., 2002, “Reliability analysis for rotor rubbing”,
Journal of Vibration and Acoustics, pp 58-62.
62
Download