UNIVERSIDADE FEDERAL DO CEARÁ - UFC
CENTRO DE CIÊNCIAS
DEPARTAMENTO DE MATEMÁTICA
CURSO DE PÓS-GRADUAÇÃO EM MATEMÁTICA
.
João Vítor da Silva
Teoria Geométrica da Medida e Aplicações
Fortaleza
2011
João Vítor da Silva
Teoria Geométrica da Medida e Aplicações
Dissertação submetida à Coordenação do Curso de
Pós-graduação em Matemática da Universadade Federal
do Ceará, como requisito para obtenção do grau de
Mestre em Matemática.
Área de concentação: Matemática.
Orientador: Prof. Dr. Eduardo Vasconcelos Oliveira
Teixeira.
Fortaleza
2011
Silva, João Vítor da
S58t
Teoria geométrica da medida e aplicações/ João Vítor da Silva.- - Fortaleza, 2011.
193f.
Orientador: Prof. Dr. Eduardo Vasconcelos Oliveira Teixeira
Área de concentração : Matemática
Dissertação(Mestrado) - Universidade Federal do Ceará,
Centro de ciências, Departamento de Matemática, Fortaleza,
2011.
1. Análise I. Teixeira, Eduardo Vasconcelos Oliveira (Orient.)
CDD 515
Dedicatória
Dedico este trabalho aos meus pais, Maria
Socorro Mendonça Silva e João Virgínio da
Silva, e, a Maria Selene Bezerra de Carvalho
todos estes os quais amo muito.
4
Tarde te amei, ó beleza tão antiga e tão nova!
Tarde demais eu te amei!
Eis que habitavas dentro de mim e eu te procurava do lado de fora!
Eu, disforme, lançava-me sobre as belas formas das tuas criaturas.
Estavas comigo, mas eu não estava contigo.
Retinham-me longe de ti as tuas criaturas, que não existiriam se
em ti não existissem.
Tu me chamaste, e teu grito rompeu a minha surdez.
Fulguraste e brilhaste e tua luz afugentou a minha cegueira.
Espargiste tua fragrância e, respirando-a, suspirei por ti.
Tu me tocaste, e agora estou ardendo no desejo de tua paz...
Santo Agostinho
5
Agradecimentos
Aos meus pais: Maria Socorro Mendonça Silva e João Vígínio da Silva pela criação,
amor, carinho, confiança e oportunidade de me oferecerem uma educação dígna e o caráter
o qual possuo hoje. Aos meus quatro irmão: Antônio Ednaldo da Silva, Eliana Mendonça
da Silva Lemos, Juliana Virgínia da Silva e Cícero Leond Mendonça da Silva por sempre
estarem do meu lado me apoiando em todos os momentos.
Aos amigos de graduação que estarão sempre em meu coração: Fabiano Luiz da Silva,
Antônio Emiliano Ribeiro, Cícera Ferreira dos Santos e Rosilda Benício de Sousa. Aos
professores do ensino Fundamental e Médio que contribuiram de maneira significativa para
minha formação: Ivone, Lurdes, Inês, Solange, Carlos Sérgio, Joana Angélica, Valdênia,
Raimundo Porfílio, Vanda Caciano e Rosa Maria. Aos professores da graduação na
Universidade Regional do Cariri e no IFCE os quais me estimularam a dar continuidade em
meus estudos: Evandro Carlos Ferreira dos Santos, Carlos Humberto Soares Júnior, Mário
de Assis Oliveira, Zeláber Gondim Guimarães, Carlos Alberto Soares de Almeida, Pedro
Ferreira de Lima, Fernando Luis e Juscelino Pereira Silva. Aqueles meus companheiros os
quais estiveram mais presentes em meu mestrado: Cícero Tiarlos Nogueira Cruz, Francisco
Pereira Chaves, Priscila Rodrigues de Alcântara, Maria de Fátima Cruz Tavares, Júnio
Moreira de Alencar, Francisco de Assis Benjamim Filho, Maria Wanderlândia Coriolano de
Lavor, José Loester Sá Carneiro, Antonio Wilson Rodrigues da Cunha, Filipe Mendonça
de Lima, Francisco Calvi da Cruz Júnior, João Francisco da Silva Filho, Antonio Edinardo
de Oliveira, José Deibsom da Silva, José Ederson Melo Braga, Leon Denis da Silva,
Raimundo de Araújo Bastos Júnior, Rondinelle Marcolino Batista, Tiago Mendonça
Lucena de Veras, Valéria Gerônimo Pedrosa, Ana Shirley Monteiro da Silva, Disson,
Adriano e aqueles os quais não tive a oportunidade de ser colega de turma, mas me
tornara amigo: do doutorado: Flávio França Cruz, José Nazareno Vieira Gomes, Kelton
Silva Bezerra, Marco Antonio Lázaro Velásquez ,e, do mestrado: Rachel Costa da Silva,
Elaine Sampaio, Robério Alexandre Coelho, André, Renato e Leonardo.
A todos os meus companheiros de disciplina Seminário II: Damião Júnio Gonçalves de
Araújo, Michel Pinho Rebolças, Isaías Pereira de Jesus, Raimundo Alves Leitão Júnior
e Marcelo Dário dos Santos Amaral, que foram incentivadores e contribuiram de várias
formas para o sucesso, conclusão e aperfeiçoamento deste trabalho.
Aos funcionários do departamento de matemática, principalmente a secretária da
Pós-Graduação Andrea Costa Dantas pela sua atenção e eficiente trabalho, e, aos
funcionários da biblioteca: Seu Erivan, Dona Fernanda e dona Rosilda, todos estes pelo
auxílio prestado durante todo o curso de mestrado.
A meu orientador Eduardo Vasconcelos Oliveira Teixeira pelo incentivo e confiança na
conclusão deste trabalho.
Aos professores do curso de mestrado em matemática: Luquésio Petrola de Melo
Jorge, Silvano Dias Bezerra de Menezes, Cleon da Silva Barroso, Antônio Caminha
Muniz Neto, Jorge Herbert Soares de Lira, José Othon Dantas Lopes, Aldir Chaves
Brasil Júnior, Marcos Ferreira de Melo, João Lucas Marques Barbosa, José Fábio Bezerra
Montenegro, Diego Ribeiro Moreira e Eduardo Vasconcelos Oliveira Teixeira, pela ímpar
e incomensurável contribuição, experiência e exemplo que todos esses me forneceram.
À minha querida Maria Selene Bezerra de Carvalho pelo amor, dedicação, incentivo e
compreensão nas horas mais necessárias e difíceis as quais esteve sempre do meu lado.
À FUNCAP pelo suporte financeiro.
Aos membros da banca.
A nossa Mãe do Céu, Nossa Senhora, a quem devo agradecer por sua constante
vigilância e interseção por mim perante seu amadíssimo filho, Nosso Senhor Jesus Cristo.
E acima de Tudo a Deus, o Pai e criador; Jesus Cristo, o Filho Salvador e o Espírito
Santo, santificador e luz do mundo. A Este(s) não enumero os motivos pela simples razão
de não ser possível caberem todos estes em nenhum livro.
7
Resumo
O
presente trabalho de mestrado visa estudar alguns dos trabalhos do matemático
italiano Ennio De Giorgi, os quais fazem referência a existência e regularidade
de superfícies mínimas, mas estas não contextualizadas integralmente no âmbito da
Geometria Diferencial, mas sim voltadas a um campo da matemática a algumas décadas
implementada que a Teoria Geométrica da Medida. Segundo as definições de Ennio
De Giorge iremos estudar superfícies, que para o mesmo se davam como bordos de
certos conjuntos, os quais são denotados de conjuntos de Caccioppoli, homenagem
esta dada por De Giorgi a o matemático italiano Renato Caccioppoli, tais conjuntos
tem muitas propriedades geométricas interessantes, como por exemplo adimetem plano
tangente canônico em quase todo ponto, e, possuem “perímetro” finito. Os resultados
expostos constatarão que até a dimensão 7 todas as soluções do problema de Plateau são
regulares e em geral sua classe de regularidade é C1,α .
Nossos esforços se concentrarão em:
i. Definir o que é uma superfície, em geral de modo a ter-se um conceito mais amplo
que variedades, mas com alguma Geometria Diferencial;
ii. Mostrar que existem superfícies mínimas que minimizam área via um Teorema de
Compacidade;
iii. Provar a regularidade da superfície, ou seja, a superfície é uma variedade suave.
Enfim, os resultados deste trabalho em sua maioria serão baseados na obra: Minimal
¯
Surface and Function of Bounded Variation do autor Enrico Giusti, o qual resume bem
as técnicas de Teoria Geométrica da Medida referentes aos trabalhos de Ennio De Girogi
sobre teoria de regularidade de superfícios mínimas.
Esta obra tratará do problema de Plateau, que é encontrar uma hipersuperfície de área
mínima que abrange determinado limite. Foi somente em 1930-1931 que uma solução deste
problema foi encontrada por Douglas e Radó para superfícies em R3 , e levou mais 30 anos
i
até que o caso em dimensões superioriores pudesse ser atacado por meio de métodos da
teoria da medida. Pioneiros destes novos métodos foram De Giorgi, Reifenberg, Almgren,
Fleming, e Federer.
Este trabalho é dedicado à representação e abordagem de Ennio De Giorgi ao estudo
de superfícies mínimas paramétricas. De Giorgi definiu hipersuperfícies admissíveis para
o problema de Plateau como limite de sequências de conjuntos de Caccioppoli. Estes
últimos são conjuntos de Borel E em Rn com a propriedade que a derivada distribucional
DχE , ou seja, no sentido das distribuições, da função característica χE é uma medida de
Radon de variação total localmente limitada. O perímetro de um conjunto de Caccioppoli
E em um aberto limitado Ω ⊂ Rn é definido como a variação total de DχE em Ω:
Per(E; Ω) =
Z
|DχE | = sup
Ω
Z
Ω
divg(x)dx; g ∈
C10 (Ω; Rn ), |g|L∞ (Ω)
≤1
Com esta noção enfraquecida de “superfície” o problema de Plateau é fácilmente
solucionado no seguinte sentido: Teorema (Existência de uma solução fraca): Sejam Ω
aberto e limitado, e, L um conjunto de Caccioppoli em Rn . Então, na classe dos conjuntos
de Caccioppoli {E; E − Ω = L − Ω} existe um conjunto de Perímetro mínimo em Ω, o qual
denotaremos conjunto minimal em Ω. A prova da regularidade em quase toda parte, no
entanto, exige um trabalho bastante difícil. Por isso, o noção de fronteira reduzida ∂∗ E
de um conjunto E é introduzida como o conjunto dos pontos x ∈ Rn para os quais existe
um vetor normal unitário generalizado ν(x) como o limite de quando ρ → 0 dos vetores
Z
νρ (x) = Z
DχE
B(x,ρ)
.
|DχE |
B(x,ρ)
Teorema (Regularidade parcial): Para qualquer conjunto mínimal E em Ω a fronteira
reduzida Ω∩∂∗ E é uma hipersuperfície analítica C1,α e o conjunto singular Ω∩(∂E−∂∗ E)
tem dimensão (n−1)−dimensional de Hausdorff nula. As ferramentas para a prova destes
resultados são fornecidas a partir do capítulo 5. Nos capítulos 2-3 serão tratadas algumas
propriedades das funções de variação limitada:compacidade, semicontinuidade da variação
total, aproximação por funções suaves e traços. A prova de regularidade se encontra no
capítulo 8. Trataremos algumas poucas sessões à investigação do conjunto singular. Para
cada ponto x0 ∈ ∂E existe um cone tangente C como limite em L1loc de uma seqüência
adequada de conjuntos de expansão Et = {x ∈ Rn : x0 + t(x − x0 ) ∈ E} quando t → 0. O
cone tangente é mínimo se E é mínimal numa vizinhança de x0 e x0 pertence à fronteira
reduzida se e somente se ∂C é um hiperplano.
Teorema (Almgren, Simons): Seja F um cone em Rn cujo fronteira é suave fora do
ii
vértice. Se o primeira e a segundo variações de área de ∂F satisfazerem δA = 0 e δ2 A ≥
0, então ∂F é um hiperplano para n ≤ 7. n = 7 é a dimensão ótima (Bombieri, De
Giorgi, Giusti). Portanto, para n ≤ 7 a fronteira de todo conjunto mínimal E em Ω ⊂
Rn é analítica. Este resultado é completado por outro teorema (Federer): A medida
s-dimensional de Hausdorff do conjunto singular é nula para qualquer s > n − 8.
A leitura deste trabalho exige um conhecimento “razoavelmente” bom em teoria da
medida e alguma familiaridade com a teoria das equações diferenciais parciais elípticas.
Em sua totalidade, o trabalho é, em sua grande maioria uma obra de representação e
exposição de Teoria Geométrica da Medida a qual é um novo ramo da Análise altamente
não trivial.
Palavras-Chaves:
Funções de varição limitada, conjuntos de Perímetro finito
(conjuntos de Caccioppoli), conjuntos minimais, Superfícies Mínimas, Regularidade
de Superfícies Mínimas, Problema de Plateau, Problema de Bernstein, Teoria de De
Giorgi-Nash-Moser.
iii
Abstract
T
his master thesis aims to study some of the work of mathematician Italian Ennio
De Giorgi, which refer to the existence and regularity of minimal surfaces, but these
do not fully contextualized within the Differential Geometry, but focused on a field of
mathematics within a few decades implemented which is the Geometric Measure Theory.
According to the definitions of Ennio De Giorgi will study surfaces, which gave to the same
as maples certain sets, which are denoted Caccioppoli sets , its have many interesting
geometric properties, such as tangent adimetem canonical almost everywhere, and have
finite "perimeter". The above results found that up to size 7 all the solutions to the
problem of Plateau are regular and in general their class of regularity is C1,α Our efforts
will focus on:
i. Defining what is a surface in general to take up a broader concept that varieties,
but with some differential geometry;
ii. Show that there are minimal surfaces which minimize area via a compactness
theorem;
iii. Prove the regularity of the surface, ie, the surface is a smooth manifold.
Finally the results of this study are mostly based on the work: Minimal Surface
and Function of Bounded Variation of the author Enrico Giusti, which summarizes
the techniques of Geometric Measure Theory relating to the work of Ennio De Girogi on
a regularity theory of minimal surfaces.
This work will address the problem of Plateau, which is to find a hypersurface of least
area that covers certain threshold. It was only in 1930-1931 that a solution to this problem
was found by Douglas and Radó for surfaces in R3 , and it took another 30 years until the
case could be in higher-dimensions attacked by methods of measure- theorteic. Pioneers
of these new methods were De Giorgi, Reifenberg, Almgren, Fleming, and Federer.
This work is dedicated to representation and Ennio De Giorgi approach to the study of
minimal surfaces parameteric. De Giorgi defined hypersurfaces admissible for the problem
iv
of Plateau as the limit of sequences of sets of Caccioppoli. These latter are útimo Borel
sets E en Rn with the property that the distributional derivative DχE , i.e., in the sense of
distributions, the characteristic function χE is a Radon measure of locally bounded total
variation. The perimeter of a Caccioppoli set E in a limited open ΩRn is defined as the
total variation of DχE in Ω:
Per(E; Ω) =
Z
|DχE | = sup
Ω
Z
Ω
divg(x)dx; g ∈
C10 (Ω; Rn ), |g|L∞ (Ω)
≤1
With this weakened notion of “surface” the Plateau problem is easily solved in the
following sense: Theorem (existence of a weak solution): Let Ω open and bounded and
L on a set of Caccioppoli Rn . Then the class of sets Caccioppoli {E, E − Ω = L − Ω} is
a set of minimal perimeter in Ω, which denote the minimal set in Ω. The proof of the
regularity almost everywhere, however, requires a very difficult job. Therefore, the notion
of reduced boundary ∂∗ E of a set E is introduced as the set of points x ∈ Rn for which
there exists a generalized unit normal vector ν(x) as the limit when ρ → 0 of the vectors
Z
νρ (x) = Z
DχE
B(x,ρ)
.
|DχE |
B(x,ρ)
Theorem (partial regularity): For any minimal set E in Ω the reduced boundary Ω ∩ ∂∗ E
is an analytic hypersurface and the singular set Ω ∩ (∂E − ∂∗ E) has (n − 1)−dimensional
Hausdorff measure 0.
Tools for the proof of these results are provided from Chapter 5. In chapters 2-3 will
address some properties of functions of bounded variation: compactness, semicontinuity of
the total variation, approximation by smooth functions and trace. The proof of regularity
found in Chapter 8. We will try a few sessions to the investigation of the singular set.
For every point x0 ∈ ∂E there exists a tangent cone C as the limit at Ll oc1 for proper
sequence of sets of expansion Et = {x ∈ Rn : x0 + t(x − x0 ) ∈ E} when t → 0. The tangent
cone is minimal if E is minimal in a neighborhood of x0 and x0 belongs to the reduced
boundary if and only if ∂C is a hyperplane.
Theorem (Almgren, Simons): Let F be a cone in Rn whose boundary is smooth outside
the vertex. If the first and second variations of area of ∂F satisfy δA = 0 and δ2 A ≥ 0,
then ∂F is a hyperplane for n ≤ 7. n = 7 is optimal (Bombieri, De Giorgi, Giusti).
Therefore, for n ≤ 7 the boundary Ω ∩ ∂E of every minimal set E in Ω ⊂ Rn is analytic.
This result is completed by another theorem (Federer): The s−dimensional Hausdorff
measure of the singular set vanishes for any s > n − 8.
v
Reading this work requires a knowledge “fairly” good in measure theory and some
familiarity with the theory of elliptic partial differential equations. In their totality, the
work is mostly a work of representation and exhibition of Geometric Measure Theory
which a new branch of highly nontrivial analysis.
Key Words: Functions of Bounded variation, sets of finite perimeter (Caccioppoli
sets), minimal sets, Minimal Surfaces, Regularity of Minimal Surfaces, Problem’s Plateau,
Bernstein’s Problem, Theory of De Giorgi-Nash-Moser.
vi
Conteúdo
1 Introdução
1
1.1
Um pouco de História e alguns comentários
. . . . . . . . . . . . . . . . .
1
1.2
As Grandes Personalidades e o Legado destas . . . . . . . . . . . . . . . .
4
2 Preliminares
5
2.1
Algumas noções de Teoria da Medida . . . . . . . . . . . . . . . . . . . . .
2.2
Medida de Hausdorff . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3
Funções de variação limitada e conjuntos de Caccioppoli . . . . . . . . . . 19
2.4
6
2.3.1
Propriedades dos conjuntos de Caccioppoli . . . . . . . . . . . . . . 25
2.3.2
A fórmula de Gauss-Green e o Teorema Estrutural . . . . . . . . . 27
Regularizantes Simétricos (Mollifiers) . . . . . . . . . . . . . . . . . . . . . 32
2.4.1
Propriedades dos Regularizantes Simétricos (Mollifiers) . . . . . . . 33
2.5
Aproximação de Funções BV . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.6
Existência de Superfícies Mínimas . . . . . . . . . . . . . . . . . . . . . . . 38
2.6.1
Teoremas de compacidade . . . . . . . . . . . . . . . . . . . . . . . 38
2.7
Aproximação de conjuntos de Caccioppoli por funções C∞ . . . . . . . . . 42
2.8
Desigualdade de Sobolev e consequências . . . . . . . . . . . . . . . . . . . 46
3 Teoria do Traço para Funções de Variação Limitada
49
. . . . . . . . . . . . . . . . . . . . . . . . 49
3.1
Traço de Funções em W 1,p (Ω)
3.2
Traço de Funções de Variação Limitada . . . . . . . . . . . . . . . . . . . . 51
3.2.1
O Teorema de Lebesgue-Besicovitch e o Lema de Recobrimento de
Vitali
3.2.2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
O Teorema do Traço e a Fórmula de Gauss-Green para C+
R . . . . . 54
4 A Fronteira Reduzida
4.1
63
Fronteira Reduzida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.1.1
O Lema de Gauss-Green . . . . . . . . . . . . . . . . . . . . . . . . 66
vii
4.1.2
Densidade no sentido da medida teórica . . . . . . . . . . . . . . . 67
4.2
Blow-up da Fronteira Reduzida . . . . . . . . . . . . . . . . . . . . . . . . 72
4.3
Semi-Espaço Tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5 Regularidade da Fronteira Reduzida
5.1
Resultados preliminares . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.1.1
5.2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Conjuntos contavelmente rectificáveis e puramente não-rectificáveis
Regularidade C da Fronteira Reduzida . . . . . . . . . . . . . . . . . . . . 90
Representação localmente Lipschitz de ∂E . . . . . . . . . . . . . . 93
A medida Teórica da fronteira e o Teorema de Gauss-Green . . . . . . . . . 97
5.4.1
Medida Teórica da Fronteira . . . . . . . . . . . . . . . . . . . . . . 97
5.4.2
Teorema de Gauss-Green Generalizado . . . . . . . . . . . . . . . . 98
5.4.3
Comentários sobre Densidade-Rectificabilidade de conjuntos . . . . 100
6 Algumas Desigualdades
6.1
102
Alguns Lemas Técnicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
6.1.1
O Desvio de Minimalidade . . . . . . . . . . . . . . . . . . . . . . . 102
7 Aproximação de conjuntos minimais
7.1
7.2
7.3
113
O Lema de decaimento de De Giorgi . . . . . . . . . . . . . . . . . . . . . 114
7.1.1
O Desvio de Planridade (Flatness) - O excesso de área . . . . . . . 114
7.1.2
A Filosofia do Lema de Decaimento de De Giorgi . . . . . . . . . . 120
Superfícies Mínimas e Harmônicas . . . . . . . . . . . . . . . . . . . . . . . 121
7.2.1
Comentários sobre Espaços de Campanato . . . . . . . . . . . . . . 121
7.2.2
O lema de decaimento de De Giorgi para superfícies harmônicas . . 122
Aproximação de conjuntos de Caccioppoli . . . . . . . . . . . . . . . . . . 131
8 Regularidade de Superfícies Mínimas
8.1
86
1
5.3.1
5.4
A classe Γn−1
O Teorema Estrutural . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.2.1
5.3
79
141
Teoria de Regularidade Básica (Analiticidade) . . . . . . . . . . . . . . . . 142
8.1.1
Hölder continuidade da fronteira reduzida . . . . . . . . . . . . . . 147
. . . . . . . . . . . . . . . . . . . . . . . 150
8.2
O Teorema de Regularidade C0,α
8.3
Pontos Singulares e Cones Mínimos . . . . . . . . . . . . . . . . . . . . . . 157
8.3.1
O Teorema de Simon e a regularidade em dimensões baixas (n ≤ 7) 158
8.4
Estimativa de Federer da dimensão do conjunto singular . . . . . . . . . . 159
8.5
Regularidade C1,α para hipersuperfícies Minimas . . . . . . . . . . . . . . . 160
8.5.1
O Teorema de De Giorgi-Federer-Massari-Miranda . . . . . . . . . . 160
8.5.2
Os casos p < n e p = n na análise dos teoremas de regularidade . . 162
viii
ix
8.5.3
Comentários Finais . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
9 Teoria de De Giorgi-Nash-Moser
9.1
9.2
166
De Giorgi e o 19o problema de Hilbert . . . . . . . . . . . . . . . . . . . . 166
9.1.1
Subsoluções são limitadas . . . . . . . . . . . . . . . . . . . . . . . 168
9.1.2
O Lema de Oscilação de De Gorgi . . . . . . . . . . . . . . . . . . . 171
A equivalência entre as Teorias de De Giorgi e Nash-Moser . . . . . . . . . 175
9.2.1
A Desigualdade de Harnack e o Teorema de De Giorgi-Nash-Moser 175
9.3
Uma Aplicação geométrica do Teorema de De Giorgi-Nash-Moser . . . . . 176
9.4
Regularidade básica das soluções de divA(x, Du) = 0 em Ω . . . . . . . . 177
10 Aplicação à Teoria de Variedades Mínimas
181
10.1 Teorema de Regularidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
10.2 Cones Mínimos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
10.3 Problema de Bernstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
11 Aplicações à Problemas de Fronteira Livre
186
11.1 Problemas de Fronteira Livre . . . . . . . . . . . . . . . . . . . . . . . . . 186
11.1.1 Motivação: Problema de obstáculo . . . . . . . . . . . . . . . . . . 187
11.1.2 Existência e unicidade . . . . . . . . . . . . . . . . . . . . . . . . . 187
11.1.3 Regularidade C1,α da fronteira livre . . . . . . . . . . . . . . . . . . 189
11.2 Melhoramentos dos resultados de regularidade . . . . . . . . . . . . . . . . 191
11.2.1 Soluções Q-fracas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
11.2.2 A Classe de planaridade . . . . . . . . . . . . . . . . . . . . . . . . 192
11.2.3 Regularidade da Fronteira Livre . . . . . . . . . . . . . . . . . . . . 193
12 Apêndice
195
Capítulo
1
Introdução
Conteúdo
1.1
Um pouco de História e alguns comentários . . . . . . . . . . . . . . . . . . .
1
1.2
As Grandes Personalidades e o Legado destas . . . . . . . . . . . . . . . . . .
4
1.1 Um pouco de História e alguns comentários
Em matemática Teoria Geométrica da Medida é o estudo das propriedades geométricas
das medidas de conjuntos (geralmente em espaços euclidianos), incluindo-se coisas como
comprimento de arco e área. A mesma utiliza-se de teoria da medida a fim de generalizar
Geometria Diferencial em superfícies com singularidades suaves chamadas conjuntos
rectificáveis.
Contribuições significativas surgiram ao se utilizarem técnicas de Teoria Geométrica
da Medida, as quais podemos citar: Richard Shoen e Shing Tung Yau1 provaram de
maneira original a conjectura de positividade da massa em Cosmologia, a mesma está
relacionada a conjectura de Yamabe. Em 2000 Hutchings-Morgan-Ritoré e Ros provaram
a conjectura da Bolha Dupla: A Bolha dupla de sabão é a maneira mais economica de
se compacatar dois volumes descritos a priori. E soluções regulares para o Problema de
Plateau.
Na interface entre Geometria e Equações Diferenciais Parciais, a Teoria Geométrica
da Medida tem sido extensivamente desenvolvida desde a década de 60, iniciando com
contribuições básicas devido aos matemáticos Herbert Federer, Ennio De Giorgi, A.I.
Volpert e F. Almgren, em conexão com questões resultantes de cálculo das variações,
desigualdades isoperimétricas, etc. Tem numerosas aplicações no estudo de conjuntos
1
Este trabalho (somado a outras importantes contribuições) levou Yau a ganhar a medalha Fields em
1982.
CAPÍTULO 1. INTRODUÇÃO
2
singulares, fenômenos e problemas físicos: formação de bolhas de sabão, buracos negros,
cristais, defeitos de materiais, transisão de fase, fissura em mecânica, linhas de vórtices
em cristais líquidos, supercondutores e superfluidos; Sistemas Dinâmicos, processamento
de imagens e Teoria de regularidade de problemas de fronteira livre.
O problema de encontrar superfícies mínimas, isto é, de encontrar a superfície de área
mínima entre todas as quais estão delimitadas por uma dada curva, foi um das primeiras
considerações a respeito da fundamentação do cálculo das varições, e somente teve uma
resposta satisfatória a algumas décadas. Conhecido como o Problema de Plateau,
após o físico cego que fez belas experiências com películas de sabão e bolhas, tal problema
impôs resistência aos esforços de muitos matemáticos por mais de um século. Foi somente
na década de trinta que uma solução fora dada ao problema de Plateau em Espaços
Euclidianos tri-dimensionais, com o paper de Jesse Douglas[58] e Tibor Radó [59],[60].
O método aplicado por Douglas2 e Radó foi desenvolvido e extendido em dimensão 3
por vários outros, mas nenhum destes resultados se mostrou eficaz para hipersuperfícies
mínimas em dimensões elevadas, como também superfícies de dimensão e codimensão
quaisquer.
Somente 30 anos mais tarde que o problema de Plateau fora atacado com ênfase em
toda a sua generalidade, por vários matemáticos usando técnicas de medida-teórica; em
particular podemos citar De Giorgi [50][51][52][53], Reifenberg [61], Federer e Fleming
[30] e Almgren [49],[62]. Com respeito a alguns desses matemáticos temos que Federer e
Fleming definiram um superfície k−dimensional em Rn como uma k− corrente, isto é, um
funcional linear em k−formas. Tal método é tratado com detalhes no livro de Federer [63].
Quanto a Almgren e Allard tiveram uma visão diferenciada de superfície, introduziram
a noção de varifold k−dimensional, isto é, medidas de Radon em Rn × G(n, k), onde
G(n, k) denota a variedade Grassmanniana de k−planos em Rn . Por outro lado as idéias
de De Giorgi [53] nunca foram publicadas em revistas de grande circulação. Segundo o
formalismo de Ennio De Giorgi uma hipersuperfície em Rn era o bordo de um conjunto
mensurável E ⊂ Rn , cuja função característica χE possui derivadas distribucionais que
são medidas de Radon de variação total localmente finita, a esses conjuntos Ennio
De Giorgi em homenagem póstuma a Renato Caccioppoli denotou de conjuntos de
Caccioppoli (em teoria dos perímetros, conjuntos de perímetro localmente finito).
Nesse contexto a área (n − 1)−dimensional é dada como a variação total de DχE .
Com respeito a teoria dos perímetros desenvolvida segundo as idéias de Ennio De
Giorgi, é possível mostrar, sem grandes dificuldades, com o auxílio de alguns resultados
de compacidade a existência de uma solução para o problema de Plateau em algum
2
Em 1936 Douglas foi laureado com a famosa medalha Fields por este trabalho conhecido como
problema de Plateau no disco.
CAPÍTULO 1. INTRODUÇÃO
3
senso mais fraco (este é o teorema de existência de superfícies mínimas, conjuntos
de fronteira minimal).
Em contrapartida é uma tarefa nada simples mostrar que
tais hipersuperfícies (e em geral toda hipersuperfície minimizante de área) são de fato
regulares (hipersuperfícies analíticas), como também com um pouco mais de esforço e uma
maquinária de teoremas sofisticados em mãos pode-se mostrar os teoremas de regularidade
de De Giorgi: A fronteira reduzida ∂∗ E de um conjunto minimal E ⊂ Rn é uma variedade
(n − 1)−dimensional C1,α , exceto possivelmente em um conjunto singular fechado. As
idéias para a prova da analiticidade e da Hölder continuidade estão concentradas no paper
de De Giorgi [53], o qual fora posteriormente simplificado e completado por Miranda [74]
onde este mostrou que o conjunto singular Σ tem medida de Hausdorff (n−1)−dimensional
nula.
Referente ao trabalho de Ennio de Giorgi [53]: O mesmo mostrou que para todo x ∈ ∂E
é possível definir um vetor normal aproximado.
Z
νρ (x) = Z
DχE
Bρ
.
|DχE |
Bρ
Podendo-se mostrar que se, para algum x ∈ ∂E e algum ρ > 0 , o vetor νρ (x) tem
comprimento sufientemente próximo de 1, então a diferença 1 − νr (x) converge a zero
quando r → 0. Está caracteriza-se como a parte mais difícil da prova, com isso se
concretiza algo relativamente fácil mostrar que ∂E é regular (analítica) na vizinhança de
x. Tal método se torna muito eficaz para o estudo regularidade em quase todo ponto.
Uma vez estabelecida a regularidade em quase todo ponto, é natural se pensar quando
o conjunto singular Σ pode existir. Dessa forma, podemos nos dirigir ao estudo do
comportamento de ∂E nas proximidades de um ponto, digamos a origem, e este é em
geral feito através de técnicas de Blow-up, isto é, por considerar os conjuntos
Ek = {x ∈ Rn ;
x
∈ E} k = 1, 2, ...
k
Devido a invariância geométrica da área, todos esse conjuntos Ek são minimais, existirá
dessa forma uma subsequência desses conjuntos convergindo em medida para um conjunto
C, o qual também será minimal. Além disso C é um cone, grosseiramente falando um cone
tangente a E em 0. Dessa forma podemos observar que E é regular em uma vizinhança de
0 se e somente se ∂C é um hiperplano, com isso, segue que a existência de singularidades
em ∂E é reduzida a existência de cones mínimos singulares.
Em [49] Almgren provou a não existência de cones mínimos singulares em Rn , e em
[54], Simons extendeu este resultaso até a dimensão 7, provando assim a regularidade de
CAPÍTULO 1. INTRODUÇÃO
4
de hipersuperfícies mínimas em Rn , para n ≤ 7. Este resultado é ótimo pois o cone de
Simons
S = {x ∈ R8 ; x21 + x22 + x23 + x24 < x25 + x26 + x27 + x48 }
é cone mínimo singular em R8 . Tal resultado fora demonstrado por Enrico Bombieri3 ,
Ennio De Giorgi e Enrico Giusti [43].
Por final, baseado nos trabalhos de Simons , Herbert Federer [4] provou que a dimensão
de Hausdorff do conjunto singular não excede n − 8, e esta estimativa é ótima.
1.2 As Grandes Personalidades e o Legado destas
O legado que a Teoria Geométrica da Medida proporcionou e ainda proporciona é
substancialmente incalculável. Muitos matemáticos foram influenciados pelas escolas
matemáticas de H. Federer, E. De Giorgi, Almgren, Allard entre outros grandes nomes,
entre esse podemos citar: Luis A. Caffarelli desenvolveu o estudo de regularidade de
fronsteira livre como também conjuntos singulares de fronsteira livre [87], [88]; J.
Cheeger e T. Colding desenvolveram trabalhos na direção de variedades Riemannianas
com curvatura de Ricci não-negativa [89]; L. Simon desenvolveu trabalhos em conjuntos
singulares de aplicações harmônicas minimizantes de energia ou correntes minimizantes
de área [90], [91] ; Outros trabalhos se concentram no estudo de aplicações harmônicas
estacionárias [92], campos de Yang-Mills [93], [94], equações de Seiberg-Witten [95], [96],
[97] , e, equações de Ginzburg-Landau em dimensões mais elevadas [98], [99].
3
Enrico Bombieri foi premiado, assim como outros matemáticos citados neste trabalho, com a medalha
Fields em 1974 por essa e outras diversas contribuições
Capítulo
2
Preliminares
Conteúdo
2.1
Algumas noções de Teoria da Medida
. . . . . . . . . . . . . . . . . . . . . .
6
2.2
Medida de Hausdorff . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.3
Funções de Variação Limitada e conjuntos de Caccioppoli . . . . . . . . . . . .
19
2.3.1
Propriedades dos conjuntos de Caccioppoli . . . . . . . . . . . . . . . .
25
2.3.2
A Fórmula de Gauss-Green e o Teorema Estrutural . . . . . . . . . . .
27
2.4
Regularizantes Simétricos (Mollifiers)
2.4.1
. . . . . . . . . . . . . . . . . . . . . . 32
Propriedades dos Regularizantes Simétricos (Mollifiers) . . . . . . . . .
33
. . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.5
Aproximação de Funções BV
2.6
Existência de Superfícies Mínimas . . . . . . . . . . . . . . . . . . . . . . . .
38
Teoremas de Compacidade . . . . . . . . . . . . . . . . . . . . . . . .
38
2.6.1
. . . . . . . . . . . . 42
2.7
Aproximação de conjuntos de Caccioppoli por funções
2.8
Desigualdade de Sobolev e consequências . . . . . . . . . . . . . . . . . . . . .
C∞
46
N
este cápítulo estudademos algumas ferramentas essenciais para o desenvolvimento
de teoria de regularidade para conjuntos minimais: funções de variação limitada
e conjuntos de Caccioppoli. Obteremos muitas propriedades destes, em particular o
Teorema de existência de conjuntos minimais (superfícies mínimas). Estaremos em geral
a utilizar a noção de medida de Hausdorff (n−1)−dimensional a qual é a mais apropriada
para nossos objetivos.
Mas, antes de iniciarmos faremos uma pequena amostrar de resultados de Teoria da
Medida, as quais são pre-requisitos para nossos estudos.
CAPÍTULO 2. PRELIMINARES
6
2.1 Algumas noções de Teoria da Medida
Nesta seção estará uma exposição sucinta de alguns resultados de Teoria da Medida,
os quais serão utilizados no transcorrer desse texto e servirão de subsídios para a
demonstração de muitos outros.
Medidas e Funções µ−mensuráveis
Seja X um conjunto , e 2X o conjunto de partes de X.
Definição 2.1. Uma coleção F de subconjuntos de X, F ⊂ 2X , é chamado uma σ−álgebra
se
i. ∅, X ∈ F;
ii. Se A ∈ F então X − A ∈ F; e
iii. Se Ak ∈ F, k = 1, ..., então
[
k≥1
Ak ∈ F. Além disso, uma σ−álgebra de Borel do
Rn é a menor σ−álgebra contendo os subconjuntos abertos do Rn .
Definição 2.2. Uma aplicação µ : 2X → [0, +∞] é chamada uma medida em X se
satisfizer
i. µ(∅) = 0; e
[
X
µ(Ak ) sempre que A ⊂
Ak .
ii. µ(A) ≤
k≥1
k≥1
Além disso, seja µ uma medida sobre X e A ⊂ X. Então µ restrita a A, escreveremos da
seguinte forma, µ⌊A, será a medida definida por (µ⌊A)(B) = µ(A ∩ B) para todo B ⊂ X.
Nota 2.1. A definição (2.2) é usualmente denotada de Medida Exterior.
Definição 2.3. Um conjunto A ⊂ X é µ−mensurável (no sentido de Carathéodory) se
para cada B ⊂ X.
Definição 2.4.
µ(B) = µ(B ∩ A) + µ(B − A).
i. Uma medida µ sobre X é regular se para cada conjunto A ⊂ X,
existe um conjunto µ−mensuravel B tal que A ⊂ B e µ(A) = µ(B).
ii. Uma medida µ sobre Rn é chamada Borel se todo conjunto de Borel é µ−mensurável.
iii. Uma medida µ sobre o Rn é Borel regular se µ é Borel e para cada A ⊂ Rn , existe
um conjunto de Borel B tal que A ⊂ B e µ(A) = µ(B).
CAPÍTULO 2. PRELIMINARES
7
Definição 2.5. Uma medida µ sobre Rn é uma medida de Radon se µ é uma medida de
Borel regular e µ(K) < ∞ para todo conjunto compacto K ⊂ Rn .
Definição 2.6. Seja µ uma medida sobre X, e Y um espaço topológico. Uma função
f : X → Y é µ−mensurável se f−1 (U) é µ−mensurável para cada conjunto aberto U ⊂ Y.
Teorema 2.1.1. (Egoroff ) Seja µ uma medida em Rn e suponha que fk : Rn → Rm com
(k = 1, 2, ...) são µ− mensuráveis. Assuma também que A ⊆ Rn é µ− mensurável com
µ(A) < ∞ e fk → g µ− quase sempre em A. Então para cada ε > 0 existe um conjunto
µ mensurável B ⊆ A tal que
i. µ(A − B) < ε
ii. fk → g uniformemente em B.
Proof: Veja Evans-Gariepy [6] pag. 16.
Teorema 2.1.2. (Lusin) Sejam µ uma medida de Borel regular em Rn e f : Rn → Rm
uma função µ-mensurável. Assuma que A ⊂ Rn é µ-mensurável com µ(A) < ∞. Então
para cada ε > 0 fixado existe um conjunto compacto K ⊂ A tal que
i. µ(A − K) < ε e
ii. f|K é contínua.
Proof: Veja Evans-Gariepy [6] pag. 15.
Integrais e Teoremas de Limites
Definição 2.7.
i. Dizemos que ν é uma medida com sinal sobre Rn , e denotaremos
por ν ∈ M(Rn ) se existe uma medida de Radon µ sobre o Rn e uma função f ∈
L1loc (Rn ; µ) tal que ν = µ⌊f
ii. Dizemos que ν é uma medida vetorial sobre o Rn em Rm , e denotaremos por ν ∈
M(Rn ; Rm ), se existe uma medida de Radon µ e uma função vetorial f = (f1 , ..., fm )
com fi ∈ L1loc (Rn ; µ) tal que νi = µ⌊fi (i = 1, ..., m).
Teorema 2.1.3. (Lema de Fatou) Sejam fk : X → [0, ∞] funçõs µ−mensuráveis (k =
1, ...). Então
Z
Z
lim inf fk dµ ≤ lim inf fk dµ
k→∞
k→∞
Proof: Veja Evans-Gariepy [6], Teorema 1, p.19.
CAPÍTULO 2. PRELIMINARES
8
Teorema de Fubini
Definição 2.8. Seja µ uma medida sobre um conjunto X e ν uma medida sobre um
conjunto Y. Para cada M ⊂ X × Y definimos
(µ × ν)(M) := inf
X
µ(Ak )ν(Bk ) ,
k≥1
onde o ínfimo é tomado sobre toda sequência de conjuntos µ−mensurável Ak ⊂ X e
[
Ak × Bk . A medida µ × ν é
conjunto ν−mensurável Bk ⊂ Y (k = 1, ...) tal que M ⊂
k≥1
chamada a medida produto de µ e ν.
Teorema 2.1.4. (Fubini) Seja µ uma medida sobre um conjunto X e seja ν uma medida
sobre um conjunto Y.
i. µ × ν é uma medida regular em X × Y.
ii. Se A ⊂ X é µ−mensurável e B ⊂ Y é ν−mensurável, então A×B é µ×ν-mensurável
e (µ × ν)(A × B) = µ(A)ν(B).
iii. Se M ⊂ X × Y é σ−finita com respeito a µ × ν (isto é, M =
[
Mk , onde Mk é
k≥1
µ × ν−mensurável e (µ × ν)(Mk ) < ∞ para k = 1, ...), então My = {x : (x, y) ∈ M}
e µ−mensurável para ν em quase todo x é µ(My ) é ν−integrável. Além disso,
(µ × ν)(M) =
Z
µ(My )dν(y).
Y
Analogamente para x e Mx = {y : (x, y) ∈ M}.
iv. Se f : X × Y → [−∞, ∞] é µ × ν−integrável e f é σ−finita com respeito a µ × ν
R
(em particular, se f é µ × ν−somável), então a aplicação y 7→ X f(x, y)dν(x) é
R
ν−integrável, a aplicação x 7→ Y f(x, y)dν(y) é ν−integrável, e ainda,
Z
X×Y
fd(µ × ν) =
Z Z
X
f(x, y)dµ(x) dν(y) =
Y
Z Z
Y
f(x, y)dν(y) dµ(y)
X
Proof: Veja Evans-Gariepy [6], Teorema 1, p.22.
Definição 2.9.
i. A medida de Lebesgue 1-dimensional L1 em R é definida por
L1 (A) := inf
X
i≥1
diamCi : A ⊂
[
i≥1
Ci , Ci ⊂ R
CAPÍTULO 2. PRELIMINARES
9
para todo A ⊂ R.
ii. A medida de Lebesgue n-dimensional Ln sobre Rn é definida indutivamente por
Ln := Ln−1 × L1 = L1 × ... × L1 ,
ou equivalentemente,
Ln := Ln−k × Lk
para qualquer k ∈ {1, ..., n − 1}. Às vezes usaremos a notação |E|, alguns autores se
utilizam da notação meas E para a medida de Lebesgue de um conjunto genérico E
de Rn .
Diferenciação de Medidas de Radon
Definição 2.10. Sejam µ e ν medidas de Radon sobre Rn . Dizemos que ν é diferenciável
com respeito a µ em x se
Dµ ν(x) := lim
r→0
ν(B[x, r])
µ(B[x, r])
sempre que este limite existe e é finito. Ainda, diremos que Dµ ν é a densidade de ν com
respeito a µ.
Definição 2.11.
i. A medida ν é absolutamente contínua com respeito µ, e
escreveremos ν ≪ µ, se µ(A) = 0 implica que ν(A) = 0 para todo A ⊂ Rn .
ii. As medidas ν e µ são multuamente singulares, e escreveremos ν ⊥ µ, se existe um
conjunto de Borel B ⊂ Rn tal que µ(Rn − B) = ν(B) = 0.
Teorema 2.1.5. (Radon-Nikodym) Sejam µ, ν medidas de Radon sobre Rn com µ ≪
ν. Então
ν(A) =
para todo conjunto µ-mensurável A ⊂ Rn .
Z
Dµ νdµ
A
Proof: Veja Evans-Gariepy [6], Teorema 2, p.40.
Teorema 2.1.6. (Lebesgue-Besicovitch)
i. Seja µ uma medida de Radon sobre Rn e f ∈ L1loc (Rn ; µ). Então
1
lim
r→0 µ(B(x, r))
para x ∈ Rn . µ quase sempre.
Z
fdµ = f(x)
B(x,r)
CAPÍTULO 2. PRELIMINARES
10
ii. Seja µ uma medida de Radon sobre Rn , 1 ≤ p < ∞ e f ∈ Lploc (Rn ; µ). Então
1
lim
r→0 µ(B(x, r))
Z
|f − f(x)|p dµ = 0
(2.1)
B(x,r)
para x ∈ Rn µ−quase sempre.
Proof: Veja Evans-Gariepy [6], Teorema 1, p.43, e Corolário 1, p.44.
Definição 2.12. Um ponto x é dito ser um ponto de Lebesgue de f com respeito a µ, se
(2.1) é satisfeita.
Teorema de Representação de Riesz-Markov
Teorema 2.1.7. (Representação de Riesz- Markov)
i. Seja L : C0 (Rn ; Rm ) → R um funcional linear satisfazendo
sup {L(φ) : φ ∈ C0 (Rn , Rm ), |φ| ≤ 1, spt(φ) ⊂ K} < ∞
para cada conjunto compacto K ⊂ Rn . Então existe uma única medida de Radon
vetorial µ = σ||µ|| ∈ M(Rn ; Rm ) tal que
L(φ) =
Z
φ.dµ =
Rn
Z
φ.σd||µ||
(2.2)
Rn
para toda φ ∈ C0 (Rn , Rm ), onde σ : Rn → Rm é tal que |σ| = 1 ||µ||−q.s.
ii. Seja L : C0 (Rn ) → R um funcional linear tal que L(φ) ≥ 0 para toda φ ∈
C0 (Rn ), φ ≥ 0. Então existe uma medida de Radon µ em Rn tal que
L(φ) =
Z
φ.dµ
Rn
para toda φ ∈ C0 (Rn )
Proof: Veja Evans-Gariepy [6], Teorema 1, p.49, e Corolário 1, p.53.
Definição 2.13. Diremos que λ é uma medida de variação se para cada conjunto aberto
V ⊂ Rn ,
λ(V) = sup {L(φ) : φ ∈ C0 (Rn , Rm ), |φ| ≤ 1, spt(φ) ⊂ V} ,
onde L : C0 (Rn , Rm ) → R é um funcional linear limitado. Se L é como em (2.2), então
λ = ||µ||.
CAPÍTULO 2. PRELIMINARES
11
Convergência Fraca
Seja U um conjunto aberto do Rn
Definição 2.14. Sejam µ e µk , k = 1, ..., medidas de Radon sobre Rn . Diremos que
µk converge fracamente a µ no sentido de medida de Radon, e escrevemos µk ⇀ µ em
M(Rn ), se
lim
Z
k→∞ Rn
para toda φ ∈ C0 (Rn ).
φ.dµk =
Z
φ.dµ
Rn
Teorema 2.1.8. Sejam µ, µ1 , µ2 , ... medidas de Radon em U.
Então as seguintes
afirmações são equivalentes:
i. µk ⇀ µ em M(U);
ii. lim sup µk (C) ≤ µ(C) para cada compacto C ⊂ U e µ(O) ≤ lim inf µk (O) para cada
aberto O ⊂ U;
iii. lim µk (B) = µ(B) para cada B ⊂ Rn conjunto Boreliano limitado com µ(∂B) = 0.
k→∞
Proof: Veja Evans-Gariepy [6] Teorema 1, pag. 54.
Teorema 2.1.9. (Compacidade fraca para Medidas de Radon) Seja {µk }k≥1 em
M(Rn ) tal que sup µk (K) < ∞ para todo conjunto compacto K do Rn . Então existe uma
k
subsequência {µkj }j≥1 e uma medida de Radon µ tal que µkj ⇀ µ em M(Rn ).
Proof: Veja Evans-Gariepy [6],pag. 55.
Definição 2.15. Sejam f, fk ∈ Lp (U), k = 1, ..., e seja 1 ≤ p < ∞.
i. Diremos que fk converge fracamente em Lp (U) para f, e escrevemos fk ⇀ f em
Lp (U), se
para toda φ ∈ Lq (U), onde
Z
1
p
+
U
1
q
fk φdx →
Z
fφdx
U
= 1, 1 < q ≤ ∞.
ii. Diremos que fk converge fracamente em medida, ou como medida, para f se
Z
para toda φ ∈ C0 (U)
U
fk φdx →
Z
fφdx
U
CAPÍTULO 2. PRELIMINARES
12
iii. Diremos que fk converge fracamente no sentido das distribuições, ou como
distribuição, para f se
Z
para toda φ ∈ C∞
0 (U)
U
fk φdx →
Z
fφdx
U
Definição 2.16. Sejam f, fk ∈ L∞ (U), k = 1, .... Diremos que fk converge fraco estrela
→
em L∞ (U) para f, e escreveremos f −
⋆ f em L∞ (U), se
k
Z
para toda φ ∈ L∞ (U).
U
fk φdx →
Z
fφdx
U
2.2 Medida de Hausdorff
Há no Rn uma “boa” medida m−dimensinal introduzida em 1918 pelo matemático
alemão Felix Hausdorff, chamada Medida de Hausdorff, a qual coincide com a noção
clássica de área para variedades mergulhadas, ou seja, subvariedades , porém está
definida para todos os subconjuntos de Rn . Quando n = m a medida de Hausdorff
coincide com a medida de Lebesgue. A medida de Hausdorff é a medida natural para
trabalhar com conjuntos que não são regulares no sentido da Geometria Diferencial. A
medida de Hausdorff Hs é o resultado de uma construção conhecida como construção de
Carathéodory (Veja Gianquinta-Modica-Soucek [82]).
Sejam A ⊂ Rn , 0 ≤ s < ∞ e 0 < δ ≤ ∞. Defina
Hδs (A) = inf
X
α(s)
j>1
πs/2
onde α(s) = s
e Γ (s) =
Γ ( 2 + 1)
Z∞
diam Cj
2
s
;A ⊂
[
Cj , diam Cj 6 δ
j>1
e−x xs−1 dx é a função Gama de Euler.
0
′
Observação 2.1. Para δ > δ tem-se Hδs (A) 6 Hδs ′ (A). Portanto Hδs (.) é uma função
monótona não-crescente de δ ∈ [0, ∞).
Para A e s como acima, faz sentido definirmos o limite
Hs (A) := lim Hs (A) = sup Hs (A).
δ→0
Claramente 0 6 Hs (A) 6 ∞.
δ>0
Assim, denotaremos Hs a s-dimensional Medida de Hausdorff em Rn . Por Hδs (.)
ser uma função monótona não-crescente de δ ∈ [0, ∞) temos em particular para qualquer
CAPÍTULO 2. PRELIMINARES
13
subconjunto A ⊂ Rn , δ > 0 e s ≥ 0
s
(A)
Hs (A) ≥ Hδs (A) ≥ H∞
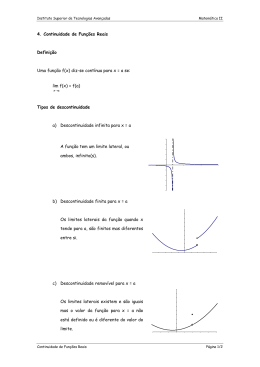
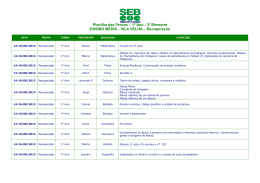
Notemos que é necessário requerer δ → 0 na ordem de forçar a cobertura “concordar”
com a geometria local do conjunto A, como é ilustrado nas figuras abaixo.
Figura 2.1: A medida de Hausdorff (área) de um pedaço da superfície sendo aproximada pela
interseção de pequenas bolas as quais a recobrem.
Figura 2.2: Um recobrimento com conjuntos menores é necessário a fim de calcular o
comprimento onde a curvatura é elevada.
CAPÍTULO 2. PRELIMINARES
14
Teorema 2.2.1. Hs é uma Medida de Borel regular se 0 ≤ s < ∞. Além disso, se
A ⊂ Rn é Hs −mensurável com Hs (A) < ∞ então Hs ⌊A é uma medida de Radon.
Proof.: Veja Evans-Gariepy [6], pag. 61 e Fanghua-Xiaoping [8], pag. 6 para a
primeira parte, e veja Evans-Gariepy [6], p.5. para a segunda parte.
Observação 2.2. Hs não é uma medida de Radon se 0 ≤ s < n, uma vez que a mesma
não é σ-finita
Teorema 2.2.2. Propriedades elementares da Medida de Hausdorff.
i. H0 (.) é uma medida de contagem, ou seja, a mesma fornece a "cardinalidade" do
conjunto;
ii. H1 = L1 em R, onde L1 denota a medida de Lebesgue;
iii. Hs = 0 em Rn se s>n;
iv. Hs (λA) = λs Hs (A). para todo λ > 0 e A ⊂ Rn . (Homogeneidade de grau s);
v. Hs (I(A)) = Hs (A) para cada I : Rn −→ Rn isometria linear e A ⊂ Rn , ou seja, a
mesma é em particular invariante por rotações e tranlações.
vi. Se f : Rn → Rm Lipschitziana, A ⊂ Rn , 0 ≤ s < ∞. Então
Hs (f(A)) ≤ (Lip(f))s Hs (A).
onde
Lip(f) := sup
|f(x) − f(y)|
; x, y ∈ Rn , x 6= y
|x − y|
Proof.: Evans-Gariepy [6], pag. 63. para (i)-(v) e pag. 75 para (vi).
Lema 2.1. Sejam A ⊂ Rn e 0 ≤ s < t < ∞.
i. Se Hs (A)<∞ então Ht (A)=0;
ii. Se Ht (A) > 0 então Hs (A) = ∞.
Proof.: Evans-Gariepy [6], pag. 65.
CAPÍTULO 2. PRELIMINARES
15
Motivados pelo conteúdo do Lema acima podemos então tratar da
Definição 2.17. A Dimensão de Hausdorff de um conjunto A ⊂ Rn é definida como
Hdim (A) = inf{s ≥ 0; Hs (A) < ∞} = inf{s; Hs (A) = 0}
= sup{s; Hs (A) > 0}
= sup{s; Hs (A) = ∞} ≤ n.
Observação 2.3. A dimensão de Hausdorff de um conjunto E ⊂ Rn coincide com a
dimensão topológica do mesmo, quando este for uma variedade topolóligica mergulhada,
ou seja, uma subvariedade.
Exemplo 2.1. (Self-similar fractals)
Ilustremos com alguns exemplos o cálculo da dimensão de Hausdorff de conjuntos
fractais.
O conjunto de Cantor clássico
O conjunto de Cantor é um fractal bem-conhecido e facilmente construtível. Podemos
construí-lo indutivamente como segue: Sejam
E0 =
[0, 1],
E1 =
[0 13 ] ∪ [ 23 , 1],
E2 =
[0, 19 ] ∪ [ 29 , 13 ] ∪ [ 89 , 1],
···
k
1
Ek = [0, 31k ] ∪ [ 32k , 3k−1
] ∪ · · · ∪ [ 3 3−1
k , 1].
\
Ek é conhecido como conjunto de Cantor (Veja figura
Então o conjunto E =
k≥0
abaixo.)
Observe que
i. Seja ψ1 (x) = x3 , ψ2 (x) =
2
3
+ 13 x. Então E = ψ1 (E) ∪ ψ2 (E);
ii. E é construído de um modo muito simples, mas as propriedades geométricas locais
são complicadas e difíceis de serem descritas em linguagem matemática clássica;
iii. Não obstante o mesmo é um conjunto bastante importante em vários sentidos:este
′
é não-enumerável e perfeito, isto é, E = E, entretanto não é conveniente medir
seu comprimento no senso normal dado que L1 (E) = 0. De qualquer forma podemos
log 2
averiguar que Hdim (E) =
.
log 3
CAPÍTULO 2. PRELIMINARES
16
Figura 2.3: Conjunto de Cantor
A curva de Von Koch
Seja F0 um segmento unitário de reta. F1 é um conjunto obtido pela remoção do terço
médio da parte de F0 e a reposição deste por outros dois lados de um triângulo equilátero
cuja base é a parte removida. Assim F1 contém 4 segmentos. Aplicando-se o mesmo
procedimento a cada parte de F1 contruiremos F2 . Deduzimos similarmente a obtenção de
Fk pela reposição dos terços médios de cada segmento de Fk−1 por outros dois lados de um
triângulo equilátero correspondente. Então a curva limite F = lim Fk é referida como a
k→∞
curva de Von Koch (Veja figura abaixo.)
Figura 2.4: A curva de Von Koch ou Snowflake (Floco de neve)
Então temos as seguintes propriedades para a cuva de Von Koch:
i. Se puzermos ψ1 (x) = x3 , ψ2 (x) =
4
[
então F =
ψj (F).
√1 x
6
+ 13 , ψ3 (x) =
√1 x
6
+
√1
6
+ 16 , ψ4 x =
2
3
+ 13 x,
j=1
ii. A curva de Von Koch tem a mesma propriedade (ii) acima do conjunto de Cantor;
CAPÍTULO 2. PRELIMINARES
17
iii. Um cálculo direto indica que o comprimento de Fk é
4 k
,
3
assim o comprimento
de F é infinito. Porém a área de F no plano 2−dimensional é zero. Portanto
o comprimento e a área de F não são objetos matemáticos covenientes a fim
de descrever a “forma” de F efetivamente. De qualquer forma podemos também
log 3
averiguar que Hdim (F) =
log 4
Mais self-similar fractals.
Figura 2.5: F2 é conhecido como a Esponja de Sierpinski, o memo é um exemplo de um
20
conjunto de dimensão fracionária. Sua dimensão de Hausdorff é log
log 3 , cerca de
2,7. F1 é obtido por homotetias com fator de escalonamento 21 . Iniciando com um
triângulo equilátero com lado 1, na n−ésima etapa removemos 3n triângulos com
3
lados 2−n . Portanto a dimensão de Hausdorff de F1 é log
log 2 .(De Studies in Geometry
c
by Blumenthal and Manger 1970
by W.H. Freeman and Company.)
Exemplo 2.2. O conjunto de Cantor em R (Bis)
Para qualquer intervalo J = [a, b] em R e qualquer t ∈ (2, ∞), definimos
b−a
b−a
Φ(J) = a, a +
,b .
∪ b−
t
t
Temos a seguinte importante identidade
|J|m =
X
|S|m para m =
S∈Φ(J)
m
log 2
.
log t
De fato a expressão do lado direito é 2 |J|tm . Portanto 2 = tm . Iniciemos com
H0 = [0, 1],
CAPÍTULO 2. PRELIMINARES
18
e tome indutivamente para j = 1, 2, ...,
Hj = ∪{Φ(J); J ∈ Hj−1 }
Então definimos o conjunto de Cantor por
Ct =
\
Hj
j≥0
Pode-se checar que
Hdim (Ct ) = m =
e
Hm (Ct ) =
log 2
,
log t
wm
.
2m
Note que C3 é o conjunto de Cantor estudado em Análise Real.
Para mais informações sobre conjuntos fractais e dimensão de Hausdorff consulte Rataj
[13], Albertini [19] e Waiezsäcker [20].
Teorema 2.2.3. Hn = Ln em Rn .
Proof Veja Evans-Gariepy [6] pag. 70 ou Fanghua-Xiaoping [8] pag. 11
Exemplo 2.3. Conforme os resultados acima podemos inferir que
Figura 2.6: A medida de Hausdorff Hn−1 da esfera coincide com a medida de Lebesgue da
mesma, ou seja, sua área.
Além disso, temos também conforme os resultados acima expostos que Hs (Sn−1 ) = 0
se s > n e Hs (Sn−1 ) = ∞ se s < n. Analogamente para o n−toro, Hs (Tn ) = 0, se s > n
e Hs (Tn ) = ∞ se s < n.
CAPÍTULO 2. PRELIMINARES
19
Figura 2.7: Sendo o 2−toro uma subvariedade topológia, sua medida de Hausdorff Hn−1
coincide com a medida de Lebesgue, istó é, sua área.
2.3 Funções de variação limitada e conjuntos de
Caccioppoli
Funções de Variação Limitada (Funções BV, do inglês Bounded Variation) são
funções cuja derivada distribucional é uma medida de Radon finita. Isto é essencialmente
a forma enfraquecida para teoria da medida de uma função ser diferenciável.
Definição 2.18. Seja Ω ⊂ Rn , n ≥ 2.
i. Uma função f ∈ L1 (Ω) é dita ser de Varição Limitada e escreveremos f ∈
BV(Ω), mais adiante esclareceremos o que seria tal conjunto, se o gradiente Df
, distribucional, ou seja, no sentido das distribuições é uma medida de Radon finita
em Ω.
ii. Diremos que f é uma função de variação limitada local, e denotamos f ∈ BVloc (Ω),
se f ∈ BV(V) para todo conjunto aberto V ⊂⊂ U.
Em outras palavras, f ∈ BV(Ω) se, e somente, existe Df ∈ M(Ω; Rn ) finita tal que
para i = 1, ..., n,
Z
fφxi = −
Ω
Z
φd(Di f),
Ω
para toda φ ∈ C10 (Ω), onde Df = (D1 f, ..., Dn f) em Ω; ou equivalentemente,
Z
fdivφdx = −
Ω
Z
φ.d(Df),
Ω
CAPÍTULO 2. PRELIMINARES
20
para toda φ ∈ C10 (Ω). Além disso, para simplificar escreveremos
Z
fdivφdx = −
Ω
Z
φ.Df
Ω
para toda φ ∈ C10 (Ω).
Df portanto representa o gradiente fraco distribucional da função f. Em termos mais
gerais estamos exigindo que a função f satisfaça em um certo sentido o clássico Teorema
da Divergência (Gauss-Green).
Definição 2.19. Seja f ∈ L1loc (Ω) , definimos a Variação Total de f em Ω conjunto
aberto do Rn como:
Z
Z
1
n
|Df| = V(f; Ω) = sup
f(x)divg(x)dx; g ∈ C0 (Ω; R ), |g|L∞ (Ω) ≤ 1 .
Ω
Ω
Definição 2.20.
Z
Z
1
n
1
BV(Ω) = f ∈ L (Ω); ∃ Df ∈ M(Ω; R ), fdivφdx = − φ.Df ∀ φ ∈ C0 (Ω) .
Ω
Ω
Z
Se munirmos BV(Ω) com a norma kfkBV(Ω) = kfkL1 (Ω) + |Df| então este se tornará um
Ω
Z
|Df| define uma seminorma em BV(Ω). Analogamente
Espaço de Banach. Ademais
Ω
se define
BVloc (Ω) =
1
n
f ∈ L (V); ∃ Df ∈ M(V; R ),
Z
fdivφdx = −
V
Z
V
φ.Df ∀ φ ∈
C10 (V)
com V ⊂⊂ Ω
No exemplo a seguir, observaremos que para toda função f ∈ W 1,1 (Ω) tem variação
total finita. Em particular, veremos que toda função de Sobolev tem localmente variação
limitada.
Exemplo 2.4. Seja f uma função de Sobolev, isto é, f ∈ W 1,1 (Ω), então temos a seguinte
igualdade
Z
|Df| =
Ω
Z
|∇f|dx.
Ω
Para cada V ⊂⊂ Ω e g ∈ C10 (V; Rn ), com |g| ≤ 1 temos
Z
fdivg = −
V
Z
Ω
∇fgdx ≤
Z
V
|∇f|dx < ∞
Agora ao aplicarmos a definição de variação total concluiremos que
Z
Ω
|Df| ≤
Z
|∇f|dx.
Ω
CAPÍTULO 2. PRELIMINARES
21
Aqui se tem ∇f = (f1 , ..., fn ) e f1 ....fn são as derivadas generalizadas de f. Agora é
suficiente provar a desigualdade oposta, para tanto fixe ε > 0, e escolha φ como
(|∇f|)ε
|∇f|
onde |∇f|ε = ηε ∗ Df, ou seja, a convolução de Df com um regularizante simétrico η como
veremos nas seções seguintes; então
Z
Ω
|Df| ≥
Z
fdivφdx =
Ω
Passando o limite quando ε → 0, obtemos
Z
Ω
|Df| ≥
Z
Z
Ω
(|∇f|)ε .|∇f|
|∇f|
|∇f|dx.
Ω
Observe também que a mesma igualdade é válida se f é de classe C1 .
Mediante a definição de variação total de uma função f ∈ L1loc (Ω), note que a variação
da mesma pode ser infinita. Neste caso, veremos através do Teorema (2.3.1), que pode
ser encontrado em Ambrosio-Fusco-Pallara [10], que esta não será uma função de variação
limitada.
Teorema 2.3.1. Seja f ∈ L (Ω). Então f ∈ BV(Ω) se, e somente se,
Z
disso,
|Df| = ||∇f||(Ω).
1
Ω
Z
Ω
|Df| < ∞. Além
Proof: Suponhamos que f seja uma função de variação limitada, ou seja, f ∈ BV(Ω).
Fixemos φ ∈ C10 (Ω; Rn ), |φ| ≤ 1, então temos que
−
Z
fdivφdx =
Ω
Z
Ω
φ.∇f ≤
Z
d||∇f||.
Ω
Uma vez que |φ| ≤ 1, segue segundo a definição que
Reciprocamente, definamos um funcional linear L :
L(φ) := −
Z
Z
|Df| ≤ ||∇f||(Ω) < ∞.
Ω
C10 (Ω; Rn )
fdivφdx,
→ R por
Ω
para toda φ ∈ C10 (Ω; Rn ). Observemos que |L(φ)| ≤ V(f; Ω)||φ||L∞ . Agora fixemos um
conjunto compacto K ⊂ Ω, e seja V um conjunto aberto tal que K ⊂ V ⊂⊂ Ω. Para cada
φ ∈ C0 (Ω; Rn ) com spt(φ) ⊂ K, existe uma sequência φk ∈ C10 (V; Rn ), k = 1, ..., tal que
b
φk → φ uniformente em V. Definimos L(φ)
:= lim L(φk ), para todo φ ∈ C0 (Ω; Rn ).
k→∞
b está bem-definido, é contínuo e,
Pela desigualdade |L(φ)| ≤ V(f; Ω)||φ||L∞ , vemos que L
além disso, devido ao Teorema de Hahn-Banach (Veja Apêndice) vemos que o mesmo
CAPÍTULO 2. PRELIMINARES
22
b : C0 (Ω; Rn ) → R tal que
pode ser estendido a um operador linear L
b
sup L(φ)
: φ ∈ C0 (Ω; Rn ), |φ| ≤ 1, spt(φ) ⊂ K < ∞.
Finalmente, pelo Teorema de Riesz-Markov, existe uma única medida de Radon
vetorial µ tal que
b
L(φ)
:=
Z
φ.dµ.
Ω
Portanto, f é uma função de variação limitada, isto é, f ∈ BV(Ω). Ainda, para cada
b
φ ∈ C1 (Ω; Rn ), |φ| ≤ 1, tem-se |L(φ)|
≤ V(f; Ω), logo ||∇f||(Ω) ≤ V(f; Ω), e isto finaliza
0
a demonstração do Teorema.
Exemplo 2.5. Suponhamos que f ∈ W 1,1 (Ω), então pelo Exemplo (2.4) e o Teorema
1,1
anterior (2.3.1), f ∈ BV(Ω), logo W 1,1 (Ω) ⊂ BV(Ω), e analogamente, Wloc
(Ω) ⊂
1,p
(Ω) ⊂ BVloc (Ω) para 1 ≤ p ≤ ∞. Consequentemente,
BVloc (Ω). Em particular, Wloc
toda função de Sobolev tem variação localmente limitada.
Exemplo 2.6. Sejam g ∈ C10 (Ω; Rn ), E ⊆ Rn com fronteira C2 e χE a função
característica de E. Então pelo Teorema de Gauss-Green (Teorema da Divergência) segue
que
Z
χE divg(x)dx =
Ω
Z
∂E
gνdHn−1 ≤ Hn−1 (∂E ∩ Ω)
onde |ν(x)| = 1, sendo este o vetor normal exterior a ∂E . Se em acréscimo assumirmos
|g(x)| ≤ 1, teremos via definição de variação total que
Z
Z
1
n
|Df| = sup
f(x)divg(x)dx; g ∈ C0 (Ω; R ), |g|L∞ (Ω) ≤ 1 ≤ Hn−1 (∂E ∩ Ω) < ∞.
Ω
Ω
Portanto χE ∈ BV(Ω). De fato se tem
Z
Ω
|Df| = Hn−1 (∂E ∩ Ω).
(2.3)
Vejamos: Do fato de E ter fronteira C2 , ν(x) será uma função de classe C1 com
|ν(x)| = 1 . Dessa forma invocando o Teorema de Tietze diferenciável, ou Teorema
da Extensão de Whitney ou mesmo o Teorema para Aproximação de funções Lipschitz
por funções C1 (Veja Apêndice), existe uma função N, definida em todo o Rn , tal que
N ∈ C1 (Rn ; Rn ) e |N(x)| ≤ 1 para todo x. Se escolhermos η ∈ C∞
0 (Ω) com |η| ≤ 1 e se
puzermos g = Nη teremos via o Teorema de Gauss-Green,
Z
Z
divg(x)dx =
νdHn−1
E
∂E
CAPÍTULO 2. PRELIMINARES
23
Assim se nos utilizarmos das definições de Variação Total e Medida de Hausdorff na
última igualdade seguirá que
Z
Z
n−1
∞
|DχE | ≥ sup
νdH ; η ∈ C0 (Ω), |η| ≤ 1 = Hn−1 (∂E ∩ Ω)
Ω
∂E
Observação 2.4. Pelo Exemplo (2.5) acima tem-se W 1,1 (Ω) ⊆ BV(Ω). Entertanto não
se terá BV(Ω) = W 1,1 (Ω), vejamos: Suponha que E ⊆ Rn tenha fronteira C2 e seja χE a
função característica de E. Adimitindo que E seja limitado então teremos
Z
Ω
χE dx = Ln (E ∩ Ω)
onde Ln denota a medida de Lebesgue de E ∩ Ω em Rn e consequentemente χE ∈ L1 (Ω).
Em contrapartida χE ∈
/ W 1,1 (Ω), pois se o fosse, por χE ∈ BV(Ω), χE deveria ser
absolutamente contínua, o que facilmente é constatado sua negativa.
Para mais detalhes consute Evans-Gariepy [6] pag. 164.
Motivados pelo exemplo (2.6) acima juntamente com a observação subsequente
podemos então falar na seguinte
Definição 2.21. Sejam E um conjunto Boreliano e Ω ⊂ Rn aberto.
Definimos o
Perímetro de E em Ω como:
Z
Z
1
n
Per(E; Ω) =
|DχE | = sup
divg(x)dx; g ∈ C0 (Ω; R ), |g|L∞ (Ω) ≤ 1
Ω
Ω
Nota 2.2. A definição acima pode ser extendida a qualquer conjunto Boreliano B ⊂ Rn
ao tomarmos
Per(E; B) = inf {Per(E; Ω) : B ⊂ Ω, Ω ⊂
Aberto}
Moralmente, o Perímetro de um conjunto E será a medida generalizada de sua fronteira
e esta, como vimos no exemplo anterior, coincidirá com a noção clássica de área quando
a fornteira do mesmo for suficientemente regular, ou seja, suave.
Observação 2.5. Por consequência das exposições temos
i. |Df| é a medida de variação de f; |DχE | é a medida de perímetro de E; |DχE |(Ω) é
o perímetro de E em Ω;
ii. Se f ∈ BVloc (Ω) ∩ L1 , então f ∈ BV(Ω) se, e somente se, |Df|(Ω) < ∞ neste caso
podemos definir
||f||BV(Ω) = ||f||L1 (Ω) + |Df|(Ω).
CAPÍTULO 2. PRELIMINARES
24
iii. Podemos conseguir via o Teorema de Riesz-Markov a seguinte representação
|Df|(V) = sup
Z
|DχE |(V) = sup
para cada V ⊂⊂ Ω.
V
fdivφdx; φ ∈
Z
E
divφdx; φ ∈
C10 (V; Rn ), |φ|
≤1 ,
C10 (V; Rn ), |φ|
≤1
A última observação ressalta nossa escolha de variação total e Perímetro do um
conjunto E.
Exemplo 2.7. Seja E ⊂⊂ Ω um conjunto aberto limitado.Suponhamos que ∂E seja uma
fronteira Lipschitz, então E tem perímetro finito. Com efeito, fixado ϕ ∈ C10 (Ω; Rn ), |ϕ| ≤
1, pela Fórmula de Gauss-Green versão para campos suaves em domínios cujas fronteiras
são localmente o gráfico de funções Lipschitz (Veja Apêndice),
Z
divϕdx =
E
Z
∂E
ϕ.νdHn−1 < ∞,
onde ν é a normal exterior a ∂E. Logo χE ∈ BV(Ω), o que implica que E é um conjunto
de perímetro finito.
Definição 2.22. Diremos que um conjunto Boreliano E é um conjunto de Caccioppoli
se, e somente se, para todo Ω ⊂ Rn aberto e limitado, este tiver Perímetro localmente
finito, isto é, Per(E; Ω) < ∞.
Nota 2.3. Originalmente, conjuntos de perímetro finito foram definidos como conjuntos
que podem ser aproximados por domínios poliedrais , E ∈ P, o qual é definido como
qualquer conjunto E ⊂ Rn no qual é o fecho de um conjunto aberto cuja fronteira
topológica, ∂E, está contida em uma união finita de hiperplanos do Rn . Essa definição é
similar a definição de Lebesgue da área de uma superficie. Mais geralmente, o perímetro
de qualquer conjunto, não necessariamente mensurável, foi definido como
Per(E; Rn ) := inf lim inf Hn−1 (∂Eh ); Eh ∈ P, |(E − Eh ) ∪ (Eh − E)| → 0
h→0
então mostra-se que E é um conjunto mensurável, se Per(E; Rn ) < ∞, e, neste caso,
o perímetro coincide com o perímetro da definição acima (Para mais detalhes veja
Gianquinta-Modica-Soucek [82]).
CAPÍTULO 2. PRELIMINARES
25
2.3.1 Propriedades dos conjuntos de Caccioppoli
i. Se Ω ⊆ Ω1 então Per(E; Ω) ≤ Per(E; Ω1 ) com igualdade quando E ⊂⊂ Ω (isto é, E
é um subconjunto compacto de Ω);
ii. Per(E1 ∪ E2 ; Ω) ≤ Per(E1 ; Ω) + Per(E2 ; Ω) com igualdade quando dist(E1 , E2 ) > 0;
iii. De fato o item acima pode ser melhorado da seguinte forma
Per(E1 ∪ E2 ; Ω) + Per(E1 ∩ E2 ; Ω) ≤ Per(E1 , Ω) + Per(E2 , Ω)
iv. Se |E| = 0 então Per(E) = 0. Em particular se |E1 △ E2 | = |(E1 − E2 ) ∪ (E2 − E1 )| = 0
então Per(E1 ) = Per(E2 ).
Para uma demonstração de tais propriedades consulte Pacheco [12], pag. 39. e Ennio
de Giorgi Selected Papers. [29] pag. 221.
Vejamos uma contextualização de conjuntos de Caccioppoli:
Definição 2.23. (Partições de Caccioppoli) Seja Ω ⊂ Rn um conjunto aberto e I ⊂ N;
X
P(Ei , Ω) <
Diremos que uma partição {Ei }i∈N de Ω é uma partição de Caccioppoli se
i∈I
∞. Se diz que a partição {Ei }i∈N é ordenada se |Ei | ≥ |Ej | sempre que i ≤ j.
Vejamos o seguinte exemplo de partição de Caccioppoli
Figura 2.8: A partição {Eh } do retângulo (0, x1 ) × (0, y1 ) é uma partição de Caccioppoli se e
X
somente se
(xh + yh ) < ∞.
CAPÍTULO 2. PRELIMINARES
26
Observação 2.6. Pelo Teorema de Riesz-Markov vemos que sendo E um conjunto de
Caccioppoli, então existe uma medida de Radon ω (a valores vetoriais) com variação
localmente finita tal que, para toda g ∈ C10 (Ω; Rn ),
Z
divg(x)dx =
E
Z
g(x)d(ω)
(2.4)
onde ω = −DχE . Isto justifica a definição dada de Função de Variação Limitada.
A recíproca também é verdadeira, vejamos: Suponha que exista uma medida de Radon
ω (a valores vetoriais) tal que se verifica a identidade (2.4) acima. Então, se tomarmos
g ∈ C10 (Ω; Rn ) com |g|L∞ (Ω) ≤ 1 teremos
Z
divg(x)dx =
E
Z
g(x)d(ω) ≤ |ω|(Ω) = V(ω, Ω) < ∞.
Portanto aplicando a definição de Perímetro concluiremos que
Per(E; Ω) ≤ |ω|(Ω) < ∞
para cada conjunto aberto e limitado Ω, e, dessa forma E é um conjunto de Caccioppoli
com ω = −DχE
Lema 2.2. O suporte (no sentido das distribuições) da medida de Radon (vetorial) DχE
é um subconjunto da fronteira de E, ou seja, spt(DχE ) ⊆ ∂E.
Nota 2.4. Dada f : E −→ R tem-se spt(f) := {x ∈ E; f(x) 6= 0}.
Proof: Escolha x ∈
/ ∂E, então x ∈ (Rn − E), o qual é aberto, assim pela definição
existe uma vizinhança aberta A de x inteiramente contida em int(E) ou int(Rn − E)
Se A ⊂ int(Rn − E) = Rn − E então χE (x) = 0 em A e
Z
Ω
hg, DχE (x)i = −
Z
A
χE (x)divg(x)dx = 0 ∀ g ∈ C10 (A; Rn ),
então x ∈
/ spt(DχE ).
Em contrapartida, se A ⊂ int(E), então χE (x) = 1 em A. Assim
Z
Ω
hg, DχE (x)i = −
Z
A
divg(x)dx = 0 ∀ g ∈ C10 (A; Rn ).
Portanto x ∈ R − spt(DχE ) e dessa forma o Lema está demonstado.
n
CAPÍTULO 2. PRELIMINARES
27
Na próxima subseção veremos algumas aplicações da teoria até aqui estudada.
2.3.2 A fórmula de Gauss-Green e o Teorema Estrutural
Da definição de Medida de Radon vetorial DχE e das propriedades de Perímetro,
usando o Lema (2.2) podemos escrever:
Z
Z
divg(x)dx = − hg, DχE (x)i
E
∂E
ou seja, temos uma versão mais geral da fórmula de Gauss-Green para conjuntos de
Caccioppoli E. De fato pela Observação (2.6) acima tais conjuntos são caracterizados por
esta propriedade.
Teorema 2.3.2. (Teorema Estrutural ou de Representação) Seja f ∈ BVloc (Ω).
Então existe uma medida de Radon µ em Ω e uma função µ-mensurável σ : Ω → Rn tal
que
i. |σ(x)| = 1 µ − quase sempre e
Z
Z
fdivϕ = − ϕσ para toda ϕ ∈ C10 (Ω; Rn )
ii.
Ω
Ω
Proof: Defina o funcional linear L :
C10 (Ω; Rn )
→ R por L(φ) ≡ −
φ ∈ C10 (Ω; Rn ). Uma vez que f ∈ BVloc (Ω), segue que
Z
fdivφ para
Ω
sup L(φ); φ ∈ C10 (V; Rn ), |φ| ≤ 1 ≡ C(V) < ∞
para cada conjunto aberto V ⊂⊂ Ω, e dessa forma
|L(φ)| ≤ C(V)||φ||L∞
(2.5)
para φ ∈ C10 (V; Rn ).
Fixe qualquer conjunto compacto K ⊂ Ω; escolha um conjunto aberto V tal que K ⊂
V ⊂⊂ Ω. Para cada φ ∈ C0 (Ω; Rn ) com spt(φ) ⊂ K, escolha φk ∈ C10 (V; Rn )(k = 1, ...)
de modo que φk → φ uniformemente em V. Defina
b
L(φ)
≡ lim L(φk );
k→∞
de acordo com (2.5) este limite existe e o mesmo é independente da escolha da sequência
{φk }k≥1 convergente a φ. Assim pelo Teorema de Hanh-Banach (Veja Apêndice) L se
estende unicamente a um funcional linear
b : C0 (Ω; Rn ) → R
L
CAPÍTULO 2. PRELIMINARES
e
28
b
φ ∈ C0 (Ω; Rn ), |φ| ≤ 1, spt(φ) ⊂ K < ∞
sup L(φ);
para cada conjunto compacto K ⊂ Ω. Pelo Teorema de Riesz-Markov existe uma medida
de Radon µ em Rn e uma função µ−mensurável σ : Rn → Rm tal que
i. |σ(x)| = 1 para x µ− quase sempre e
Z
b
φ.σdµ
ii. L(φ) =
Rn
Do ponte de vista da análise Funcional Perímetro de um conjunto é uma função
Semicontínua inferiormente, mais precisamente:
Teorema 2.3.3. (Semicontinuidade Inferior) Sejam Ω ⊆ Rn um conjunto aberto e
{fj } uma sequência de funções em BV(Ω) a qual converge em L1loc (Ω) a uma função f.
Então
Z
Ω
|Df| ≤ lim inf
j→∞
Z
|Dfj |.
Ω
Proof: Seja g ∈ C10 (A; Rn ) com |g|L∞ (Ω) ≤ 1.
Então usando as definições de
convergência localmente uniforme, variação total e o Lema de Fatou segue que
Z
Z
Z
Z
fdivgdx = lim fj divgdx = lim fj divgdx ≤ lim inf |Dfj |
j→∞
j→∞
j→∞
Ω
Agora o resultado segue ao tomarmos o supremo sobre todas as g, ou seja,
Z
Z
|Df| ≤ lim inf |Dfj |.
Ω
j→∞
Ω
o que é exatamente a definição de Semicontinuidade Inferior para a Varição Total.
A igualdade no teorema acima não necessariamente é alcançada. Vejamos através do
1
Exemplo 2.8. Sejam Ω = (0, 2π) e fj (x) = sen(jx) para x ∈ Ω e j = 1, 2, .... As
j
Z
Z 2π
1
2π −−→
|fj |dx =
|sen(jx)|dx ≤
fj ∈ L1 (Ω) e
j→∞ 0. Portanto fj converge forte a zero
j 0
j
Ω
em L1 , ou seja, fj → 0 em L1 (Ω). Em contrapartida, sendo as fj ∈ C∞ (Ω) tem-se
Z
|Dfj |dx =
Ω
Z 2π
0
|cos(jx)|dx = 4j
Zπ
2j
cos(jx) = 4.
o
Vimos que sendo E ⊂ Rn com fronteira C2 , então Per(E; Ω) = Hn−1 (∂E ∩ Ω). E se E
não for C2 por partes, tal resultado seria válido? A resposta é não! Vejamos através de
um
CAPÍTULO 2. PRELIMINARES
29
Exemplo 2.9. Sejam {xi } a sequência de todos os pontos de coordenadas racionais em
X
εki < ∞,com k = n − 1, n.
Rn e {εi } uma sequência de números reais positivos tais que
Tome E =
[
i>1
Bi , onde Bi = B(xi , εi ).Então |E| ≤
X
i>1
|Bi | = ωn
i>1
X
i>1
εni < ∞, onde ωn é a
medida da bola unitária n-dimensional. Sendo Q denso em R segue que E = Rn , assim
n
n
necessariamente devemos ter |∂E| = ∞, o que nos fornece que Hn−1 (∂E) = ∞.
k
[
Em contrapartida, se definirmos Ek =
Bi então Ek → E ou como preferir χEk → χE
i=1
1
n
Zem L (R ), e, sendo ∂Ek suave por partes , podemos aplicar a fórmula
|DχE | = Hn−1 (∂E ∩ Ω) a fim de obtermos
Ω
Per(Ek ) = H
n−1
(∂Ek ) ≤ H
n−1
(
k
[
∂Bi ) = nωn−1
i=0
k
X
εin−1 .
i=0
Agora nos utilizando da Semicontinuidade Inferior do Perímetro (Lembre-se:
Perímetro de um conjunto E é por definição a Variação Total da função característica
X
εin−1 < ∞
desse conjunto), assim Per(E) ≤ lim inf Per(Ek ) = nωn−1
k→∞
i≥1
O exemplo a seguir mostra que um conjunto com perímetro finito pode ter um caráter
muito patológico.
Exemplo 2.10. Sejam Q = (x, y) ∈ R2 , |x|, |y| ≤ 12 e {rj }j∈N os pontos de coordenadas
[
racionais de Q. Tome ε > 0 e defina E =
Bi , onde Bj = B(rj , 2εj ). Da Propriedade (iii)
i>1
dos conjuntos de Caccioppoli e da Semicontinuidade Inferior é facilmente computado que
Per(E; R2 ) ≤
X
Per(Bj ; R2 ) = 2πε,
j
enquanto que
|E| ≤
πε2
3
O conjunto E é aberto, assim ∂E = E − E e a medida de Lebesgue de ∂E será
|E − E| ≥ |Q| − |E| ≥ 1 −
πε2
3
o qual é positivo para ε > 0 pequeno. Este exemplo mostra a existência de conjuntos
abertos com perímetro arbitrariamente pequeno, mas cuja fronteira tem medida de
Lebesgue positiva. Tal fato se explica pois ao passarmos da dimensão 1 para dimensões
maiores se χE ∈ BV(Ω) então o suporte da mesma deixará de ter interior vazio.
CAPÍTULO 2. PRELIMINARES
30
Agora, mediante o Teorema (2.3.3) (Semicontinuidade Inferior) é fácil mostrar que o
espaço BV(Ω) é um espaço normado equipado com a norma
||f||BV(Ω) = ||f||L1 (Ω) +
Z
|Df|,
Ω
De fato, BV(Ω) é um espaço de Banach. Vejamos: Quanto
as propriedades da norma,
Z
|Df|, assim somente nos resta
as mesmas seguem facilmente das definições de ||f||L1 (Ω) e
Ω
mostrar a completude do espaço BV(Ω). Seja {fj } uma sequência de Cauchy em BV(Ω);
então, pela definição da norma em BV(Ω), está será uma sequência de Cauchy em L1 (Ω),
segue da completude de L1 (Ω) que existe uma função f ∈ L1 (Ω) tal que fj → f em L1 (Ω).
ZDado que {fj } é uma sequência de Cauchy em BV(Ω), ||f||BV(Ω) é limitada. Dessa forma
|Dfj | é limitada quando j → ∞ e assim pela Teorema de Semicontinuidade Inferior
Ω
(2.3.3), f ∈ BV(Ω). Portanto somente nos resta mostrar que fj → f em BV(Ω) ou dado
que já temos convergência em L1 (Ω), que
Z
|D(fj − f)| → 0 quando j → ∞
Ω
Dado ε > 0 existe um inteiro N tal que
j, k ≥ N
⇒ ||fj − fk ||BV(Ω) < ε
Z
⇒
|D(fj − fk )| < ε
Ω
Agora fk → f em L1 (Ω) e assim fj − fk → fj − f em L1 (Ω). Logo, pelo Teorema de
Semicontinuidade Inferior (2.3.3)
Z
Ω
|D(fj − f)| ≤ lim inf
k→∞
Z
Ω
|D(fj − fk )| ≤ ε.
Dada a arbitrariedade de ε > 0, segue que fj → f em BV(Ω)
Proposição 2.1.
Superior) Seja {fj } ⊂ BV(Ω) tal que fj → f em
Z (Semicontinuidade
Z
L1loc (Ω) e lim
|Dfj | =
|Df|. Então para todo conjunto aberto A ⊆ Ω
j→∞ Ω
Em particular, se
Ω
Z
Z
A∩Ω
|Df| ≥ lim sup
|Df| = 0, então
∂A∩Ω
j→∞
Z
Z
|Dfj |
A∩Ω
|Df| = lim
A
Z
j→∞ A
|Dfj |
Proof: Tome B = Ω − A = Ω ∩ (A)c . Assim o mesmo será aberto e dessa forma pelo
Teorema de Semicontinuidade Inferior (2.3.3) tem-se
CAPÍTULO 2. PRELIMINARES
Z
Z
Z
Z
|Df| ≤ lim inf |Dfj | e |Df| ≤ lim inf |Dfj |.
j→∞
A
A
B
j→∞
31
B
Por outro lado,
Z
|Df| +
A∩Ω
Z
|Df| =
B
Z
|Df| =
Z
= lim |Dfj |
j→∞ A
Z
Z
≥ lim sup
|Dfj | + lim inf |Dfj |
j→∞ ZA∩Ω
Z j→∞ B
≥ lim sup
|Dfj | + |Df|
Ω
j→∞
A∩Ω
B
Na primeira desigualdade acima uso-se um argumento de subsequência a qual converge
para o limsup afim de obetermos a minoração,e , com isso segue-se o resultado.
Nota 2.5. Seja M(U) o conjunto das medidas de Radon com sinal em U ⊂ Rn aberto.
Diremos queZ uma sequância
Z {µk } ⊂ M(U) é dita convergir fracamente a µ ∈ M(U),
−→
fdµk −
fdµ para cada f ∈ C0 (U).
µk ⇀ µ, se
k→∞
U
U
Mais geralmente podemos ter o seguinte resultado ligado as definições de medida de
Radon finita, o qual engloba o Teorema de Semicontinuidade Inferior (2.3.3)e a Proposição
de Semicontinuidade Superior (2.1).
Teorema 2.3.4. Sejam µ, µ1 , µ2 , ... medidas de Radon em U. São equivalentes:
i. µk ⇀ µ em M(U);
ii. lim sup µk (C) ≤ µ(C) para cada compacto C ⊂ U e µ(O) ≤ lim inf µk (O) para cada
aberto O ⊂ U;
iii. lim µk (B) = µ(B) para cada B ⊂ Rn conjunto Boreliano limitado com µ(∂B) = 0.
k→∞
Proof: Veja Evans-Gariepy [6] pag. 54.
CAPÍTULO 2. PRELIMINARES
32
2.4 Regularizantes Simétricos (Mollifiers)
Um Regularizante Simétrico (na literatura inglesa Mollifier) ou função
suavizante é uma função η(x) a qual possui as seguintes propriedades:
n
i. η ∈ C∞
0 (R );
ii. spt(η) ⊆ B(0; 1);
Z
iii. η(x)dx = 1.
O mesmo será denotado Regularizante Simétrico Positivo se em adição
tivermos:
iv. η(x) ≥ 0;
v. η(x) = µ(|x|) para alguma função µ : R+ −→ R. Geometricamente isto constata
que η é uma função radial.
Exemplo 2.11. Sejam
i.
γ(x) =
0
c exp
se |x| ≥ 1
1
|x|2 −1
se|x| < 1
a função deZ Cauchy infinitamente diferenciável, onde c ∈ R é escolhido de
tal sorte que γ(x)dx = 1;
ii. O Núcleo de Poisson Py (x) =
1
1
π x2 +y2
definido no semi-plano superior e o
iii. Núcleo do Calor ou de Gauss-Weierstrass em Rn dado por
1
Kt (x) =
n e
(4πt) 2
−|x|2
4t
para t > 0.
Todos estes são exemplos de regularizantes simétricos positivos.
Para mais
informações e detalhes sobre regularizantes simétricos (Good Kernel e Aproximações da
Identidade) consulte Stein-Shakarchi [85], pag. 108-114.
Dado η um regularizante simétrico positivo e f ∈ L1loc (Rn ) definamos para cada ε > 0
a família regularizante ηε (x) = ε−n η( xε ) e a família regularizante canônica fε = ηε ∗ f,
onde ∗ denota a operação de convolução de funções, ou seja,
fε (x) = ε
−n
Z
η
Rn
x−z
ε
n −n
f(z)dz = (−1) ε
Z
η
Rn
y
ε
f(x−y)dy =
Z
η(w)f(x+εw)dw
Rn
onde acima fora aplicado duas vezes o teorema da Mudança de Variável.
CAPÍTULO 2. PRELIMINARES
33
2.4.1 Propriedades dos Regularizantes Simétricos (Mollifiers)
i. fε ∈ C∞ (Rn ), fε → f em L1loc (Rn ) e se f ∈ L1 (Rn ) então fε → f em L1 (Rn );
ii. Se A ≤ f(x) ≤ B ∀x então A ≤ fε (x) ≤ B ∀x;
Z
Z
1
n
iii. Se f, g ∈ L (R ) então fε gdx = fgε ;
iv. Se f ∈ C1 (Rn ) então
∂fε
∂xi
=
∂f
∂xi
ε
;
v. Se spt(f) ⊂ A então spt(fε ) ⊂ Aε = {x; dist(x; A) ≤ ε}
Para a demostração de tais propriedades consulte Evans-Gariepy [6] pag. 123 ou Evans
[2] pag. 630.
Proposição
2.2. Suponha que f ∈ BV(Ω) e se tenha A ⊂⊂ Ω conjunto aberto tal que
Z
|Df| = 0. Então se fε é uma família regularizante simétrica (onde f é extendida a 0
∂A
Z
Z
fora de Ω se necessário),
|Df| = lim |Dfε |dx
ε→0 A
A
Proof: Pela Propriedade (i) dos Regularizantes Simétricos segue do fato de
f ∈ BV(Ω), ou seja, f ∈ L1 (Ω), que fε → f em L1 (Rn ). Pela Semicontinuidade Inferior
(2.3.3) tem-se que
Z
A
|Df| ≤ lim inf
ε→0
Z
|Dfε |dx.
A
Tomemos agora g ∈ C10 (A; Rn ) com |g|L∞ (Ω) ≤ 1. Então pelas Propriedades (iii) e (iv)
dos regularizantes simétricos temos as identidades
Z
Z
Z
fε divgdx = f(divg)ε dx = fdiv(gε )dx
Por |g|L∞ (Ω) ≤ 1, segue da Propriedade (ii) dos regularizantes simétricos que
|gε |L∞ (Ω) ≤ 1, e, sendo spt(g) ⊆ A a propriedaade (v) dos regularizantes simétricos nos
fornece que spt(gε ) ⊆ Aε = {x; dist(x; A) ≤ ε}. Assim se nos utilizarmos das identidades
acima, do fato de sptgε ⊆ Aε = {x; dist(x; A) ≤ ε} e da definição de Variação Total
concluiremos que
Z
A
Z
Z
fε divgdx = fdiv(gε )dx ≤
Z
|Df|
Aε
Ao tomarmos
o supremo sobre todas as funções g com as propriedades acima teremos
Z
|Dfε | ≤
|Df|. Dessa forma tomando o limsup na última sentença acima teremos
lim sup
ε→0
Aε
Z
A
|Dfε |dx ≤ lim sup
ε→0
Z
|Df| = lim
Aε
Z
ε→0 A
ε
|Df| =
Z
|Df| =
A
Z
|Df| +
A
Z
|Df| =
∂A
Z
|Df|
A
CAPÍTULO 2. PRELIMINARES
Z
Z
Z
Z
Portanto, lim sup |Dfε |dx ≤ |Df| ≤ lim inf |Dfε |dx ≤ lim sup |Dfε |dx.
ε→0
E dessa forma
Z
A
ε→0
A
|Df| = lim
Z
ε→0 A
A
ε→0
A
34
A
|Dfε |dx.
Observação 2.7. Se A = Rn então a Proposição acima mostra que
Z
|Df| = lim
Z
ε→0 Rn
Rn
Em particular se f = χE então Per(E) = lim
|Dfε |dx.
Z
ε→0 Rn
|(DχE )ε |dx = lim Per(Eε )
ε→0
2.5 Aproximação de Funções BV
Esta seção será dedicada a mostrar que toda função f ∈ BV(Ω) pode ser aproximada,
em algum sentido, por funções C∞ .
Não devemos esperar aproximação segundo a
norma-BV uma vez que o fecho de funções C∞ nesta norma é o espaço de Sobolev W 1,1 (Ω),
o qual foi mostrado, observação (2.4) , não ser igual a BV(Ω). Portanto, Zem particular não
devemos esperar encontrar fj ∈ C∞ (Ω) de sorte que fj → f em L1 (Ω) e
|D(fj − f)| → 0
Ω
Teorema 2.5.1. (Aproximação por funções suaves - Densidade - Anzellotti -
Giaquinta) Seja f ∈ BV(Ω). Então existe uma sequência de funções {fj } ⊂ C∞ (Ω) tal
que
lim
Z
j→∞ Ω
|fj − f|dx = 0 e lim
Z
j→∞ Ω
|Dfj |dx =
Z
|Df|
Ω
Nota 2.6. Atente para o fato que tal resultado não assegura que lim
Z
j→∞ Ω
|Dfj − Df| = 0.
Proof: Fixado ε > 0 podemos escolher m ∈ R+ tal que se tomarmos
Ωk =
então
1
x ∈ Ω ; dist(x; ∂Ω) >
m+k
Z
; k = 0, 1, 2, ...
|Df| < ε.
Ω−Ω0
Para tanto basta tomar m suficientemente grande.
Nosso objetivo agora será
construir uma partição da unidade, para tanto definamos os conjuntos Ai , i = 1, 2, ...,
construtivamente por A1 = Ω2 e para i = 2, 3, ... façamos Ai = Ωi+1 − Ωi−1 . Dessa forma
podemos tomar ϕi uma partição diferenciável da unidade subordinada a cobertura {Ai }
CAPÍTULO 2. PRELIMINARES
35
Lembremo-nos que dada uma variedade topológica M e uma cobertura arbitrária por
meio de abertos A = {Ai } de M,uma Partição da Unidade Subordinada a A é uma coleção
de aplicações contínuas {ϕi : M → R}i∈N , com as seguintes propriedades:
i. 0 ≤ ϕi (x) ≤ 1 ∀ i ∈ N e x ∈ M;
ii. spt(ϕi ) ⊂ Ai ;
iii. O conjunto dos suportes {spt(ϕi )}i∈N é localmente finito;
X
iv.
ϕi = 1;
i>1
Como nossa Partição da Unidade é diferenciável, agregando as propriedades (i)-
(iv) teremos
v. ϕi ∈ C∞
0 (Ai ).
Para mais informações e detalhes sobre partições da unidade (diferenciáveis)
consulte Lee [32] pag. 49.
Tomemos agora η um Regularizante Simétrico Positivo. Pelas propriedades dos
Regularizantes Simétricos e juntamente as da Partição diferenciável da Unidade
podemos escolher para todo índice i um número εi > 0 de tal sorte que as seguintes
condições sejam verificadas:
(a) spt(ηεi ∗ (fϕi )) ⊂ Ωi+1 − Ωi−2 (Ω−1 = ∅);
Z
(b) |ηεi ∗ (fϕi ) − fϕi |dx < ε2−i ;
Z
(c) |ηεi ∗ (fDϕi ) − fDϕi |dx < ε2−i
P
Finalmente se definirmos fε =
ηεi ∗ (fϕi ) é de fácil verificação que
i. fε ∈ C∞ (Ω);
X
fϕi então |fε − f|L1 (Ω) < ε;
ii. Sendo f =
iii.
Z
i>1
Ω
|Df| ≤ lim inf
ε→0
Z
|Dfε |dx
Ω
Vejamos:
(i) A sentença (a) acima nos fornece que a soma definindo fε é localmente finita, segue
portanto da diferenciabilidade dos regularizantes simétricos e da partição da unidade que
fε ∈ C∞ (Ω);
(ii)
Z
Z X
X
X
XZ
|fε −f|dx =
ηεi ∗ (fϕi ) −
fϕi dx ≤
|ηεi ∗(fϕi )−fϕi |dx <
ε2−i = ε
Ω
Ω
Ω
i
i
i
i≥1
CAPÍTULO 2. PRELIMINARES
36
1
→
Portanto fε −
ε→0 f em L (Ω)
(iii) Segue imediataente do Teorema do Semicontinuidade Inferior (2.3.3)
Em seguida tomemos g ∈ C10 (Ω; Rn ) com |g| ≤ 1. Então
Z
Z
XZ
|Df| =
(ηεi ∗ (fϕi ))divϕ
Ω
i
XZ
fϕi div(ηεi ∗ g)
=
i
Z
XZ
=
fdiv(ϕi ηεi ∗ g)dx − f(Dϕi ηεi ∗ g)dx
fε divgdx =
Ω
Ω
Ω
i
Ω
= Iε1 + Iε2
Dado que |ϕi ηεi ∗ g| ≤ 1, tem-se pela definição de Variação Total que
Z
Ω
fdiv(ϕ1 ηεi ∗ g)dx ≤
Z
|Df|
Ω
e tendo em vista o fato que a interseção de uma quantidade maior que 3 conjuntos Ai é
vazia segue que
XZ
i≥2
Ω
fdiv(ϕi ηεi ∗ g)dx =
Z
Iε1
XZ
i≥2
Ai
|Df| ≤ 3
Z
|Df| < 3ε
Ω−Ω0
Z
XZ
fdiv(ϕ1 ηεi ∗ g)dx +
fdiv(ϕi ηεi ∗ g)dx ≤
|Df| + 3ε e
Assim, =
Ω
Ω
Ω
i≥2
Z
XZ
X
ε
|f(Dϕi ηεi ∗ g)|dx =
ε2−i = ε.
|g(ηεi ∗ (fDϕi ) − fDϕi )|dx) ≤
|I2 | ≤
Ω
i
X
Vale ressaltar que usamos acima o fato que
Z
fε divgdx ≤
Segue da definição de Varição Total que
Z
Z
i≥1
Dϕi = 0. Portanto
i
|Df| + 4ε.
Ω
Ω
|Dfε | ≤
Z
|Df| + 4ε. Dessa forma usando
Ω
a Semicontinuidade Inferior (2.3.3)e a definição de liminf temos
Z
Z
Z
Z
|Dfε | ≤
|Df| + 4ε ≤ lim inf |Dfε |dx + 4ε ≤
|Dfε | + 4ε.
Ω
Ω
ε→0
Ω
Ω
Agora basta fazer ε → 0 para enfim obter o resultado.
Teorema 2.5.2. (Aproximação fraca da Derivada) Para cada função fk como nas
hipóteses do Teorema anterior (2.5.1), defina a medida de Radon (a valores vetoriais)
µk (B) =
Z
Dfk dx
B∩Ω
CAPÍTULO 2. PRELIMINARES
37
para cada conjunto de Borel B ⊂ R . Defina também µ(B) =
n
Z
d(|Df|)dx, então
B∩Ω
µk ⇀ µ fracamente no sentido das medidas de Radon (a valores vetoriais) no Rn .
Proof: Fixe φ ∈ C10 (Rn ; Rn ) e ε > 0. Definamos como no Teorema precedente (2.5.1)
em Ω1 ⊂⊂ Ω as seguintes funções de corte ζ satisfazendo
ζ ≡ 1 em Ω1 , spt(ζ) ⊂ Ω e 0 ≤ ζ ≤ 1.
Então,
Z
φdµk =
Rn
Z
φ.Dfk dx =
ΩZ
Z
Z
ζφ.Dfk dx + (1 − ζ)φ.Dfk dx =
Ω
Z
div(ζφ)fk dx + (1 − ζ)φ.Dfk dx.
(∗)
=−
Ω
Ω
Ω
Dado que fk → f em L1 (Ω), o primeiro termo em (*) converge a
−
Z
div(ζφ)fdx =
Ω
=
Z
ζφ.d(Df)
ZΩ
φ.d(Df) +
Ω
Z
(ζ − 1)φ.d(Df)
(∗∗)
Ω
O último termo em (**) é estimado por
||φ||L∞ |Df|(Ω − Ω1 ) ≤ Cε .
Pelo Teorema de Semicontinuidade Inferior (2.3.3), vemos que para k suficientemente
grande, o último termo em (*) é estimado por
Z
Portanto ||φ||L∞ |Dfk |(Ω − Ω1 ) ≤ Cε .
φdµk −
Rn
Z
φdµ ≤ Cε para todo k suficientemente grande.
n
R
Observação 2.8. Para todo ε > 0, N > 0 e x0 ∈ ∂Ω,
−N
ρ
lim
Z
ρ→0 B(x ,ρ)∩Ω
0
|fε − f|dx = 0
onde B(x0 , ρ) = {x ∈ Rn ; |x − x0 | < ρ}. Vejamos uma prova de tal asserssão:
Seja x ∈ B(x0 , ρ) ∩ Ω, pela escolha do spt(ϕk ) temos
fε (x) − f(x) =
X
k≥k0
1
[ηεk ∗ (fϕk ) − fϕk ], onde k0 =
−m−2
ρ
(2.6)
CAPÍTULO 2. PRELIMINARES
38
j k
e ρ1 denota o maior inteiro que não supera ρ1 . Então de (b) conforme o Teorema de
Z
|fε (x) − f(x)|dx ≤ C2−k0 e usando a relação entre
Aproximação (2.5.1) segue que
k0 e ρ conseguimos o desejado.
B(x0 ,ρ)∩Ω
2.6 Existência de Superfícies Mínimas
Nesta seção trataremos dos teoremas de compacidade e existência de superfícies
mínimas, os quais segundo o formalismo de Ennio De giorgi asseguram, segundo a
concepção do mesmo sobre hipersuperfícies, a existência de conjuntos minimais, ou seja,
segundo o nosso contexto, conjuntos que minimizam o perímetro.
2.6.1 Teoremas de compacidade
Teorema 2.6.1. (Rellich-Kondrachov para funções BV) Seja Ω ⊂ Rn aberto e
limitado com fronteira Lipschitz. Dado uma sequência {fj } ⊂ BV(Ω) tal que |fj |BV(Ω) ≤
M ∀ j, então existe uma função f ∈ BV(Ω) tal que
Z
i.
|fj − f|dx → 0;
Ω
ii.
Z
Ω
|Df| ≤ M.
Em outras palavras, {fj } é relativamente compacta na norma induzida por L1 (Ω).
Proof: Veja Brezis [37] pag.169 com as devidas adaptações.
Nota 2.7. O Teorema de Rellich-Kondrachov se concebe em contextos mais gerais, onde
se assume que o bordo de E seja C1 .
Teorema 2.6.2. (Teorema de Compacidade para funções BV) Seja Ω ⊂ Rn aberto
e limitado o qual é suficientemente regular para o Teorema de Rellich-Kondrochov (É
suficiente que a fronteira de Ω seja Lipschitz contínua). Então toda família de funções
uniformemente limitada na norma do espaço BV(Ω) é relativamente compacta em L1 (Ω)
Proof: Seja {fj } uma sequência de funções em BV(Ω) tal que |fj |BV(Ω) ≤ M. Para
cada j pelo Teorema de Aproximação (2.5.1) podemos escolher fej ∈ C∞ (Ω) tal que
Z
1
|fj − f|dx < e |fej |BV(Ω) ≤ M + 2.
j
Ω
CAPÍTULO 2. PRELIMINARES
39
Segue do Teorema de Rellich-Kondrachov (2.6.1) que fej é relativamente compacta em
L1 (Ω). Portanto a mesma possui uma subsequência convergente a uma função f em
L1 (Ω). Pelo Teorema de Semicontinuidade Inferior (2.3.3) segue que f ∈ BV(Ω). Em
resumo temos
ff
jk → f ∈ BV(Ω) pois
Z
Z
|Df| ≤ lim inf |Dfjk | ≤ M + 2
jk →∞
E este é o limite de uma subsequência de {fj }
Nota 2.8. Diremos mediante o Teorema de Compacidade (2.6.2) acima que BV(Ω) está
compactamente imerso em L1 (Ω), e escreveremos BV(Ω) ֒→ L1 (Ω).
Ennio De Giorgi pensava em uma hipersuperfície de codimensão 1 em Rn como a
fronteira de conjuntos de Caccioppoli, mais precisamente segundo o formalismo do
mesmo:
Definição 2.24. (De Giorgi) Seja M ⊂ Rn .
Então M será uma superfície
(hipersuperfície) se existir um conjunto E ⊂ Rn tal que M = ∂E, onde E é um conjunto
de Caccioppoli.
Motivados por tal definição podemos então tratar do
Teorema 2.6.3. (De Giorgi - Existência de Superfícies Mínimas) Seja Ω ⊂ Rn
aberto e limitado com bordo Lipschitz. Dado um conjunto de Caccioppoli F, existe um
conjunto de Caccioppoli E coincidindo com F fora de Ω tal que para todo conjunto de
Caccioppoli L coincidindo com F fora de Ω vale:
Per(E, Ω) =
Z
Ω
|DχE | ≤
Z
|DχL | = Per(L, Ω)
Ω
Proof: Sendo Ω ⊂ Rn limitado, podemos escolher r ∈ R+ tal que Ω ⊂ B(0; r). Assim,
dado qualque conjunto L coincidindo com F fora de Ω tem-se que
Z
Z
Z
|DχL | =
|DχL | +
|DχF |
Rn −B(0;r)
B(0;r)
Desta forma, é suficiente mostrarmos que existe um conjunto E coincidindo com F
fora de Ω tal que para todo L conjunto de Caccioppoli coincidindo com F fora de Ω vale:
Sendo
Z
Z
B(0;r)
|DχE | ≤
Z
|DχL |
(2.7)
B(0;r)
|DχF | < ∞ (F conjunto de Caccioppoli), tomando Ej uma sequência
Z
|DχEj | ≤ M para algum M > 0. Pelo Teorema
minimizante para (2.7), temos que
B(0;r)
B(0;r)
de Rellich-Kondrachov, existe uma função f ∈ BV(Ω) tal que
CAPÍTULO 2. PRELIMINARES
40
χEj → f em L (B(0; r)) e
1
Z
B(0;r)
|Df| ≤ M
Escólio: Como χEj → f, temos f = χE q.t.p para algum E (Para mais detalhes consulte
Folland [40] Exercício 2.36) . Pela Semicontinuidade Inferior do Perímetro temos que E
é minimizante.
Mediante o Teorema acima podemos então tratar da seguinte
Definição 2.25. (Conjuntos Minimais) Diremos que E ⊂ Rn é um Conjunto
Minimal ou tem Fronteira Mínima em Ω se,e somente se o mesmo satisfizer:
i. Per(E, Ω) < ∞
ii. Per(E, Ω) ≤ Per(F, Ω), qualquer que seja o conjunto de Caccioppoli F1 tal que (F −
E) ∪ (E − F) é relativamente compacto em Ω com E − Ω = F − Ω,
isto é, se, e somente se qualquer variação local de E em Ω produz um aumento na “área
superficial”, ou seja, no perímetro.
Figura 2.9: Conjunto Minimal
Nota 2.9. Em Teoria Geométrica da Medida muitas vezes se concebe a seguite definição:
Sejam A ⊂ Rn aberto χA a função característica de A. Diremos que a fronteira, ∂A, de A
é uma hipersuperfície orientada em Ω, Ω sendo um conjunto aberto, se as derivadas
Di χA são medidas em Ω, isto é, se χA ∈ BVloc (Ω).
Observação 2.9.
i. Em algum sentido o conjunto L do Teorema de Existência
de Superfícies Mínimas (2.6.3) determina os valores de fronteira para E.
Grosseiramente falando, ∂E minimiza a área ao longo de todas as superfícies com
fronteira ∂L ∩ ∂Ω. Vejamos isso através de um exemplo
Exemplo 2.12. Em R2 seja Ω = B2 = {x ∈ R2 ; |x| < 2} e L = {x ∈ R2 ; (x1 )2 + (x2 −
1)2 < 4}. Dessa forma E será o conjunto {(x1 , x2 ) ∈ L; x2 > 12 }
CAPÍTULO 2. PRELIMINARES
41
ii. Ao contemplarmos a demonstração do Teorema de Existência de Superfícies
Mínimas (2.6.3) poderemos constatar que o caráter do conjunto L é distante de
E, pois na prova , nós observamos o caráter de L exterior a BR , o mesmo não tem
influência sobre o conjunto E ∩ Ω para o qual o nosso interesse se concentra no
interior de BR .
Observação 2.10.
i. O conjunto Ω pode agir como um obstáculo forçando ∂E ao
longo da superfície mínima espandida por ∂L ∪ ∂Ω.
ii. Se nos utilizarmos do mesmo método empregado no Teorema de Existência de
Superfícies Mínimas (2.6.3) poderemos minimizar funcionais da forma
Z
FH (E) = |DχE | +
Z
H(x)dx.
E
onde em geral H(x) (veja por exemplo Massari-Miranda [26], Massari [57],
Tamanini [65], [66], Massari [68],Gonzalez-Massari [70], Pepe-Massari [75] e
Partial Differential Equations [77]) denota a curvatura média generalizada (ou
curvatura média variacional) da superfícia ∂E.
Não é tarefa difícil constatar (pelo cálculo da primeira variação do funcional FH (E))
que se E tem curvatura média variacional H, se H é contínua em x ∈ ∂E, e ∂E é
1
Tal classe de conjuntos é conhecida como classe de Caccioppoli {F; E − Ω = F − Ω}
CAPÍTULO 2. PRELIMINARES
42
suave próximo de x, então os valores da curvatura média (clássica)de ∂E em x é
dado por
−H(x)
.
n−1
Para E ⊂ Rn um conjunto de perímetro finito seja
H1 = {H ∈ L1 (Rn ); minimiza FH (E)}
O fato que todo conjunto de perímetro finito em Rn tem uma curvatura média
variacional foi observado pela primeira vez em Barozzi-Gonzalez-Tamanini [108].
2.7 Aproximação de conjuntos de Caccioppoli por
funções C∞
Nosso objetivo nesta seção é apresentar um Teorema de aproximação análogo ao do
Teorema de aproximação por funções suaves (2.5.1), entretanto nesse novo contexto
estaremos aproximando conjuntos de Caccioppoli ao invés de Funções de variação
limitada.
Teorema 2.7.1. (Fórmula da Coárea de Fleming-Rishel) Seja f ∈ BV(Ω) e defina
Ft = {x ∈ Ω; f(x) < t}. Então,
Z
|Df| =
Z∞
dt
−∞
Ω
Z
(2.8)
|DχFt |
Ω
n
Proof: Seja g ∈ C10 (Ω; R
Z ) e |g| ≤ 1. Vejamos primeiramente o caso quando f ≥ 0.
∞
Ao observarmos que f(x) =
(1 − χFt (x))dt então
0
Z
Z
fdivgdx = dt
Z∞
(1 − χFt (x))divgdt =
0
dt
0
Mas, por hipótese temos g ∈
Z
Z∞
C10 (Ω; Rn ),
fdivgdx = −
Z∞
0
dt
Z
Ft
logo
Z
Z
divgdx − χFt divgdx
Z
divgdx = 0. Segue disso que
divgdx ≤
Z∞
dt
0
Z
|DχFt |.
Ω
Agora se tivermos f(x) ≤ 0, poderemos como acima observar que
semelhantemente ao caso anterior
Z
fdivgdx ≤
Z0
−∞
dt
Z
|DχFt |.
Ω
Z0
−∞
χFt (x)dt e obter
CAPÍTULO 2. PRELIMINARES
43
Dividindo f sobre sua parte positiva e negativa poderemos escrever
Z
Z
+
−
fdivgdx = ((f) +(f) )divgdx ≤
Z∞
Z
dt
0
|DχFt |+
Z0
dt
−∞
Ω
Z
|DχFt | =
Z∞
−∞
Ω
dt
Z
|DχFt |
Ω
para qualquer função f ∈ BV(Ω). Ao nos utilizarmos da definição de variação total, ou
seja, tomarmos o supremo sobre todas as funções g tais que g ∈ C10 (Ω; Rn ) com |g| ≤ 1,
teremos
Z
Ω
|Df| ≤
Z∞
dt
−∞
Z
|DχFt |.
Ω
Vejamos agora a prova da desigualdade contrária: Assuma primeiramente que a
sentença (2.8) é verificada para f ∈ C∞ (Ω). Tomando f ∈ BV(Ω) seja {fj } uma sequência
de aproximação dada pelo Teorema de aproximação por funções suaves (2.5.1). Então,
uma vez que fj → f em L1 (Ω) e pela fórmula da Coárea para tais funções tem-se
Z
|fj − f|dx =
Z∞
dt|χFjt − χFt |dx,
−∞
Ω
onde Fjt = {x ∈ Ω, fj (x) < t}, da qual podemos garantir a existência de uma subsequência,
ainda denotada por {fj }, de sorte que χFtj → χFt em L1 (Ω) para quase todo t. Portanto,
segue do Lema de Fatou e do Teorema de Semicontinuidade Inferior (2.3.3) que
Z
|Df| = lim
Ω
Z
j→∞ Ω
|Dfj | = lim
Z∞
j→∞ −∞
dt
Z
Ω
|DχFjt | ≥
Z∞
−∞
dt
Z
|DχFt |
Ω
Dessa forma nos resta somente mostrar (2.8) para f ∈ C∞ (Ω).
De fato basta
repetirmos exatamente o raciocínio acima, porém agora fazendo uma aproximação de
f ∈ C∞ (Ω) por funções lineares fj pontualmente contínuas. Com efeito mostraremos
agora que (2.8) se verifica para funções lineares pontualmente contínuas.
N
[
Ωi e f(x) = hci , xi + bi se x ∈ Ωi , onde ci ∈ Rn e bi ∈ R. Dessa
Suponha que Ω =
forma f ∈ W 1,1 (Ω) e
Além disso,
Z
Ωi
i=1
Z
|Df| =
Ω
N
X
|ci |.|Ωi |.
i=1
|DχFt | = Hn−1 ({x ∈ Ωi ; f(x) = t}) = Hn−1 ({x ∈ Ωi ; hci , xi + bi = t}).
Assumamos agora que o eixo-x1 é perpendicular ao hiperplano {x ∈ Ωi ; hci , xi + bi =
t}, tal procedimento é lícito pois nossa classe de conjuntos é invariante por rotações e
translações. Assim, ao introduzirmos uma mudança de variáveis no membro direito de
CAPÍTULO 2. PRELIMINARES
44
(2.8), teremos
Z∞
dt
−∞
Portanto,
Z∞
Z
dt
−∞
|DχFt | =
−∞
Ωi
Z
Z∞
|DχFt | =
Ωi
N
X
|ci |Hn−1 ({x ∈ Ωi ; x1 = t})dt = |ci |.|Ωi |.
|ci |.|Ωi | =
i=1
Z
|Df|
Ω
Nota 2.10. A Fórmula da Coárea de Fleming-Rishel informa essencialmente que sendo
f ∈ BV(Ω) então Ft é um conjunto de perímetro finito para quase todo t ∈ R. Além
disso, podemos
que a recíproca desse resultado também é verdadeira, ou seja, se
Z ∞observar
Z
dt |DχFt | < ∞ então f ∈ BV(Ω). Para mais informações e detalhes
f ∈ L1 (Ω) e
−∞
Ω
consulte Ziemer [11] pag. 231.
Lema 2.3. Seja 0 < t < 1, εj → 0 quando j → ∞ e Ej = {x ∈ Rn ; fεj > t}, onde
fεj = ηεj ∗ χE . Então
Z
Z
1
lim |χEj − χE |dx ≤
|fεj − χE |dx
j→∞
min(t, 1 − t)
Proof: Segue da definição que
fEj − χE > t em Ej − E e χE − fEj ≥ 1 − t em E − Ej ,
de modo que
Z
|fεj − χE |dx ≥
Z
|fεj − χE |dx +
Ej −E
Z
E−Ej
|fεj − χE |dx ≥
≥ t|Ej − E| + (1 − t)|E − Ej | ≥
Z
≥ min{t, 1 − t} |χEj − χE |dx
Teorema 2.7.2. Todo conjunto de Caccioppoli limitado E pode ser aproximado por uma
sequência de conjuntos Ej , C∞ , tal que
Z
Z
Z
|χEj − χE |dx → 0 e |DχEj | → |DχE |
CAPÍTULO 2. PRELIMINARES
45
Proof: Sabemos do Teorema de Aproximação (2.5.1) que χE pode ser aproximado
por uma sequência de funções C∞ via a técnica de regularizante simétrico para a função
χE . Com tal técnica de regularizantes simétricos e usando a fórmula da Coárea (2.7.1)
obteremos a aproximação desejada.
Sejam ε > 0 e fε = ηε ∗ χE , onde ηε é uma família regularizante simétrica positiva.
Do fato de 0 ≤ fε ≤ 1 juntamente com a Fórmula da Coárea (2.7.1) segue que
Z
|Dfε | =
Z1
dt
0
Z
|DχEεt |,
(2.9)
Ω
onde Eεt = {x; fε (x) < t}. Pela observação (2.7) tem-se
Z
Z
(2.10)
|DχE | = lim |Dfε |
ε→0
Agora se supormos εj → 0 quando j → ∞ podemos via o Lema (2.3) concluir que
χEjt → χE q.t.p. para cada 0 < t < 1. De fato
Z
lim |χEjt
j→∞
Z
1
− χE |dx ≤
|fεjt − χE |dx → 0
min(t, 1 − t)
pois fεjt é um regularizante simétrico de χE , logo a convergência
é emZ L1 (Rn ). Pela
Z
Semicontinuidade Inferior (2.3.3) temos para cada t, lim inf |DχEjt | ≥ |DχE |. Assim,
j→∞
se nos utilizarmos das equações (2.9), (2.10) e da definição de liminf segue que
Z
Z1
Z
Z1 Z
Z
|DχE | = lim |Dfεj | = lim dt |DχEjt | = dt lim |DχEjt | ≥
j→∞
j→∞ 0
j→∞
Z
Z
Z1
Z 0
≥ dt lim inf |DχEjt | = lim inf |DχEjt | = |DχE |
j→∞
j→∞
0
Z
Z
Portanto ∀ t ∈ (0, 1), temos lim inf |DχEjt | = |DχE |. Além disso pelo Teorema de
j→∞
Morse-Sard-Federer (Veja Apêndice), temos que para todo t, ∂Ejt é uma superfície regular.
Se escolhermos um t ∈ (0, 1) tal que Fj = Ejt então pelo mostrado acima juntamente com
o Teorema de Morse-Sard-Federer tem-se
i. ∂Fj é suave no sentido clássico da Geometria Diferencial;
ii. χFj → χE em L1 (Rn );
Z
Z
iii. lim inf |DχFj | = |DχE |
j→∞
Tomando uma subsequência de εj e mutatis mutandis podemos assegurar que a
propriedade (iii) se verifica com lim ao invés de lim inf e esse argumento finaliza a
demonstração do Teorema.
j→∞
j→∞
CAPÍTULO 2. PRELIMINARES
46
Observação 2.11. Não é possível em geral aproximar um conjunto de caccioppoli E
por conjuntos C∞ contidos no interior de E (ou mesmo no exterior). Por exemplo ,
consideremos o conjunto E do exemplo (2.9). Se F é qualquer conjunto contento E, ter-se-á
necessariamente F = Rn e portanto |F − E| = ∞ ou |∂F| = ∞ (ou ambos). Segue dessa
forma que E não pode ser aproximado de seu exterior por conjuntos suaves.
Figura 2.10: Aproximação do conjunto de Caccioppoli E por conjuntos suaves Ej .
2.8 Desigualdade de Sobolev e consequências
Agora reproduziremos a versão para o espaço BV(Ω) das clássicas Desigualdades de
Sobolev, Isoperimétrica e de Poincaré.
O próximo teorema é uma extensão da clássica desigualdade de Sobolev para funções
em W 1,1 .
Teorema 2.8.1.
i. (Desigualdade de Sobolev) Seja f ∈ BV(Rn ) tendo suporte
compacto. Então
Z
|f|
n
n−1
dx
n−1
n
Z
≤ c1 (n) |Df|
onde c1 é uma constante universal.
(2.11)
É valioso observar que se f ∈ BV(Rn ), então a sequência {fj } do Teorema de
aproximação por funções suaves (2.5.1) pode ser construída de tal sorte que cada fj
tenha suporte compacto. Dessa forma pode ser derivada para a classe de funções de
variação limitada o seguinte versão da Desigualdade de Poincaré. Mais precisamente
tem-se
ii. (Desigualdade de Poincaré) Se no entanto f ∈ BV(Bρ ) e se definirmos
1
fρ =
|Bρ |
Z
fdx.
Bρ
CAPÍTULO 2. PRELIMINARES
Então
Z
47
|f − fρ |
n
n−1
dx
Bρ
n−1
n
≤ c2 (n)
Z
(2.12)
|Df|
Bρ
Proof: As desigualdades (2.11) e (2.12) já possuem suas versões para funções nos
n
∞
espaços C∞
0 (R ) e C (Bρ ), para tanto consulte Adams [1]. Provemos então (2.11):
n
Pelo Teorema de Aproximação (2.5.1) podemos escolher {fj } ⊂ C∞
0 (R ) tal que
fj → f em L (R ) e
1
n
Z
Ω
|Dfj |dx →
Z
|Df|.
Ω
Tendo em vista que (2.11) é válida para as funções fj , esta nos fornece que as fj
n
são uniformemente limitadas na norma L n−1 (Rn ), e dessa forma pela reflexividade
n
do espaço L n−1 (Rn ) o Teorema de Pettis assegura que a mesma admite uma
n
subsequência fracamente convergente a alguma função f0 ∈ L n−1 (Rn ). Como fj → f
n
em L1 (Rn ), segue da unicidade do limite fraco que f0 = f e fj ⇀ f em L n−1 (Rn ) e
assim via convergência fraca (considerações de Análise Funcional) seque que
Z
|f|
n
n−1
dx
n−1
n
≤ lim inf
j→∞
Z
|fj |
n
n−1
dx
n−1
n
Z
Z
≤ c1 (n) lim |Dfj | = c1 (n) |Df|
j→∞
Quanto a sentença (2.12), a mesma segue mutatis mutandis a demonstração acima.
Observação 2.12. Se tivermos f(x) = 0 então recuperaremos a clássica e também
a mais conhecida versão da Desigualdade de Poincaré:
||f||
n
L n−1 (Br (x))
≤C
Z
|Df|
Br (x)
Observação 2.13. Herbert Federer e Wendel H. Fleming monstraram em [30] que a
1
constante c1 (n) =
Γ( n
+1) n
2
1
nπ 2
é ótima e que a mesma é atingida por múltiplos de funções
características de bolas. É de conhecimento (Veja Massari-Miranda [26]) que c2 (n) =
n
−
1
n− n−1 wn n−1 .
Corolário 2.1. (Desigualdades Isoperimétricas) Seja E ⊂ Rn um conjunto de
Caccioppoli limitado. Então
|E|
n−1
n
Z
≤ c1 (n) |DχE |
(2.13)
CAPÍTULO 2. PRELIMINARES
48
n
min {|E ∩ Bρ |, |(R − E) ∩ Bρ |}
n−1
n
≤ c2 (n)
Z
|DχE |
(2.14)
Bρ
Proof: A sentença (2.13) é uma consequência imediamente da Desigualdade de
Sobolev aplicada a função χE uma vez que χE ∈ BV(Rn ) e esta tem suporte
compacto.
Z
1
|E ∩ Bρ |
fdx =
e
Vejamos agora a sentença (2.14). Seja f = χE . Então fρ =
|Bρ | Bρ
|Bρ |
dessa forma
Z
|f − fρ |
n
n−1
dx =
Bρ
=
Z
|f − fρ |
n
n−1
E∩Bρ
|E ∩ Bρ |
1−
|Bρ |
n−1
n
Note que |(Rn − E) ∩ Bρ | = |Bρ | 1 −
Z
|f − fρ |
Bρ
n
n−1
n−1
n
dx +
Z
n
|f − fρ | n−1 dx
(Rn −E)∩Bρ
n−1
|E ∩ Bρ | n
|E ∩ Bρ | +
|(Rn − E) ∩ Bρ |
|Bρ |
|E∩Bρ |
|Bρ |
. Assim,
dx ≥
≥ min {|E ∩ Bρ |, |(Rn − E) ∩ Bρ |}
n−1
n
≥ min {|E ∩ Bρ |, |(Rn − E) ∩ Bρ |}
n−1
n
n
n n−1
1 |E ∩ Bρ | n−1 + |(Rn − E) ∩ Bρ | n−1 n ≥
|Bρ|
.
Observação 2.14. A sentença (2.13) é conhecida como Desigualdade Isoperimétrica, já
a sentença (2.14) é conheida na literatura como Desigualdade Isoperimétrica relatica. A
interpretação da Desigualdade Isoperimétrica é que de todos os conjuntos mensuráveis de
Perímetro finito, o perímetro da bola é o menor entre os perímetros de todos os conjuntos
com a mesma medida.
Figura 2.11: Desiguladade Isoperimétrica Relativa
Capítulo
3
Teoria do Traço para Funções de
Variação Limitada
Conteúdo
3.1
Traço de funções em W 1,p . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
3.2
Traço de Funções de Variação Limitada . . . . . . . . . . . . . . . . . . . . .
51
3.2.1
51
3.2.2
O Teorema de Lebesgue-Besicovitch e o Lema de Recobrimento de Vitali
O Teorema do Traço e a Fórmula de Gauss-Green para
C+
R
. . . . . . . 54
N
este capítulo desenvolveremos a Teoria do Traço para funções de variação Limitada.
Tais ferramentas serão bastante úteis nos capítulos subsequentes.
3.1 Traço de Funções em W 1,p(Ω)
Se u ∈ C(Ω), u tem claramente valores ∂Ω no sentido usual. Entretanto, u ∈
W 1,p (Ω) não é em geral contínua, e, a mesma só está definida q.t.p em Ω. Como ∂Ω tem
medida n-dimensional de Lebesgue nula, não existe um significado direto o qual podemos
estabelecer a expressão ′′ u restrita a ∂Ω ′′ . A noção de TRAÇO resolve este problema.
Usaremos a noção de traço para dar sentido a ′′ u restrita a ∂Ω ′′ , a grosso modo
gostaríamos de atribuir significado aos valores dessas funções na fronteira de domínio Ω.
Teorema 3.1.1. (Teorema do Traço) Assuma que Ω é limitado e ∂Ω é C1 . Então
existe um operador linear limitado T : W 1,p (U) → Lp (∂U) tal que
i. Tu = u|∂Ω se u ∈ W 1,p (Ω) ∩ C(Ω) e
ii. kTukLp (∂U) ≤ C(p, Ω)kukW 1,p (Ω) para cada u ∈ W 1,p (Ω)
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA50
Tu é chamado o TRAÇO de u em ∂Ω.
Proof: Veja Evans [2] pag. 258.
Teorema 3.1.2. (Funções de Traço Nulo em W 1,p (Ω)) Sejam Ω limitado e ∂Ω C1 .
Suponha que u ∈ W 1,p (Ω). Então u ∈ W01,p (Ω) se, e somente se Tu = 0 em ∂Ω.
Proof: Veja Evans [2] pag. 259.
Observação 3.1. Seja Ω limitado com bordo ∂Ω de classe C1 .
p
L (Ω)
(1 ≤ p < ∞) não tem um traço em ∂Ω.
Uma função u ∈
Mais precisamente, não existe
um operador linear limitado T : W 1,p → Lp (∂U) tal que Tu = u|∂Ω sempre que
u ∈ L1 (Ω) ∩ C(Ω)
A resposta a esse problema é que em Lp (Ω) a norma do gradiente não pode ser em
geral limitada pela norma de u, o que deveras é sempre possível em W 1,p (Ω).
Vejamos isto através do
Exemplo 3.1. Defina f : B(0, 1) ⊂ Rn → R da seguinte forma: para todo x ∈ B(0, 1 − ε),
para ε ≪ 1 defina 0 ≤ f(x) ≤ 1 e para x próximo da fronteira façamos a função f atingí-la
de maneira suave, como por exemplo uma função de corte (função que define a partição
da unidade, por exemplo), assim tal f construída dessa forma viola a condição (ii) da
definição de Traço (Tal situação está ilustrada através da figura abaixo).
Figura 3.1: Existência de função em Lp (Ω) que viola o operador do Traço.
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA51
3.2 Traço de Funções de Variação Limitada
Assumiremos que BV(Ω) ⊂ L1 (Ω) e dessa forma consideraremos classes de
equivalência de funções em vez delas próprias. Dessa forma não faz sentido falar do
valor de uma função BV em um conjunto de medida nula, pois podemos alterar os valores
de uma função em um tal conjunto sem alterar sua classe de equivalência.
Devemos ter uma discrepância de discutir os valores de uma função BV na fronteira de
um conjunto, embora tal bordo possua medida nula. Assim a noção dos valores de uma
função em conjuntos de medida nula deve levar em consideração os valores da função em
torno de tais conjuntos ao invés de apenas o conjunto em si.
3.2.1 O
Teorema
de
Lebesgue-Besicovitch
e
o
Lema
de
Recobrimento de Vitali
Teorema 3.2.1. (Teorema da Diferenciação de Lebesgue-Besicovitch) Seja f ∈
L1 (Rn ). Então para q.t.p x ∈ Rn
−n
lim ρ
x→0
Z
(f(x + t) − f(x))dt = 0
(3.1)
Bρ
Proof: Veja Evans-Gariepy [6], pag. 43.
Como ∂Ω tem medida nula o Teorema acima não nos permite definir de forma
inequívoca os valores de f em ∂Ω, pois pela Observação 3.1 em geral f ∈ L1 (Ω) não possui
Traço sobre ∂Ω. Então o que nos falta de fato em codições mínimas para garantir que
podemos definir o Traço em ∂Ω? A resposta está intrinsecamente ligada a existência da
derivada. Veremos que se ∂Ω for Lipschtz contínuo então um poderosíssimo Teorema de
Teoria Geométrica da Medida, Teorema de Rademacher [Veja Apêndice], garante que em
tais circunstâncias ∂Ω adimite vetor gradiente Ln - quase sempre, onde Ln aqui denota
a medida n-dimensional de Lebesgue. Mais geralmente podemos definir o Traço em
hipersuperfícies fechadas S ⊂ Ω para funções BV(Ω).
Lema 3.1. (Recobrimento de Vitali) Sejam A ⊂ Rn e ρ : A → (0, 1), então existe
uma coleção enumerável de pontos xi ∈ A tais que
B(xi , ρ(xi )) ∩ B(xj , ρ(xj )) = ∅ se i 6= j
A⊆
[
i≥1
B(xi , 3ρ(xi ))
(3.2)
(3.3)
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA52
Proof: Sejam
Ak = {x ∈ A; 2−k ≤ ρ(x) ≤ 21−k }, k ∈ N e L
a classe de todos os subconjuntos de A1 , para os quais
B(x, ρ(x)) ∩ B(x, ρ(x)) = ∅ com x, y ∈ L, x 6= y.
Ordenando tais conjuntos por inclusão e utilizando o Lema de Zorn (Veja Apêndice)
garantimos a existência de um subconjunto L1 maximal. Se M ⊂ Rn é um conjunto
compacto, então L1 ∩ M é necessariamente finito (via maximalidade de L1 e compacidade
de M), e, assim o próprio L1 é enumerável.
Analogamente, seja L2 subconjunto maximal de A2 , tal que
B(x, ρ(x)) ∩ B(y, ρ(y)) = ∅ para x, y ∈ L1 ∪ L2 , x 6= y.
Por indução, seja Lj ⊂ Aj um subconjunto maximal satisfazendo
B(x, ρ(x)) ∩ B(x, ρ(x)) = ∅ para todos x, y ∈
j
[
i=1
Li , x 6= y.
Usando as condições de maximalidade dos Li podemos mostrar que A =
[
Li com união
i≥1
enumerável e satisfaz
B(x, ρ(x)) ∩ B(y, ρ(y)) = ∅ ∀ x, y ∈ A, x 6= y.
Seja z ∈ A, como A =
x ∈
k
[
i=1
[
k≥1
Ak então z ∈ Ak para algum k, e, além disso, existe
Lk tal que B(x, ρ(x)) ∩ B(x, ρ(x)) 6= ∅ (Caso contrarío isso violaria a condição
de maximalidade de Lk ). Seguem portanto das definições de Ak e Li que ρ(x) ≥ 12 ρ(z)
[
B(xi , 3ρ(xi ))
implicando que z ∈ B(x, ρ(3x)), e, dessa forma A ⊆
i≥1
Adotaremos as seguintes convenções
B(x, r) = {z ∈ Rn ; |x − z| < r} A bola em Rn
B (y, ρ) = {t ∈ Rn−1 ; |y − t| < ρ} A bola em Rn−1
′
Lema 3.2. Sejam Rn+ = {x ∈ Rn ; xn > 0} e µ uma medida de Radon positiva em Rn+ com
µ(Rn+ ) < ∞. Para ρ > 0 e y ∈ ∂Rn+ , seja
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA53
′
n
C+
ρ (y) = {x ∈ R ; x = (z, t), |y − z| < ρ, 0 < t < ρ} = B (y, ρ) × (0, ρ).
Então para y ∈ Rn−1 Hn−1 - quase sempre,
lim ρ1−n µ(C+
ρ (y)) = 0
(3.4)
ρ→0+
1
1−n
+
n−1
.
Proof: Seja Ak = y ∈ R ; lim sup ρ µ(Cρ (y)) >
k
ρ→0
[
É suficiente mostramos que Hn−1 (Ak ) = 0 para cada k, pois como A =
Ak isso
implica que H
n−1
(A) ≤
X
k≥1
k≥1
H
n−1
(Ak ) = 0.
Dado y ∈ Ak e ε > 0, existe pela definição de limsup, ρy < ε tal que
µ(C+
ρy (y)) >
1 n−1
ρy
2k
(3.5)
Pelo Lema de Recobrimento de Vitali (3.1) podemos escolher uma sequência yi ∈ Ak
[ ′
′
tal que B (yi , ρyi ) são disjuntas e Ak ⊆
B (yi , ρyi ). Assim utilizando (3.5) vemos que
i
Hn−1 (Ak ) ≤ wn−1
X
i≥1
(3ρyi )n−1 ≤ 2kwn−1 3n−1
X
µ(C+
ρy (yi ))
i
i≥1
Por outro lado dado que ρi < ε, temos
n
C+
ρy (yi ) ⊆ Lε = {x ∈ R ; 0 < xn < ε}
i
e portanto
Hn−1 (Ak ) < 2kwn−1 3n−1
X
i≥1
µ(C+
ρy (yi )) < µ(Lε ) ∀ ε > 0,
i
assim µ(Lε ) → 0 quando ε → 0 e dessa forma Hn−1 (Ak ) = 0
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA54
3.2.2 O Teorema do Traço e a Fórmula de Gauss-Green para C+
R
Lema 3.3. (1a versão do Teorema do Traço e da fórmula de Gauss-Green +
Miranda) Sejam C+
R = B (0, R) × (0, R) = BR × (0, R) e f ∈ BV(CR ). Então existe uma
′
′
′
função f+ ∈ L1 (B R ) tal que para y ∈ B
−n
lim ρ
ρ→0
Z
′
R
Hn−1 - quase sempre
|f(z) − f+ (y)|dz = 0
(3.6)
C+
ρ (y)
′
Mais ainda, se CR = BR × (0, R), então para todo g ∈ C10 (CR ; Rn )
Z
fdivgdx = −
C+
R
Z
C+
R
hg, Dfi +
Z
′
BR
f+ gn dHn−1
ou seja, temos uma versão da Fórmula de Gauss-Green para f ∈ BV(CR + ).
por
(3.7)
′
Proof: Assumamos primeiro que f é diferenciável e para ε > 0 defina fε : BR → R
(3.8)
fε (y) = f(y, ε)
′
′
′
Seja o seguinte cilindro Qε,ε ′ = BR × (ε , ε), 0 < ε < ε < R. Pela Desigualdade do
Z ε′
|Dn f|dt, disto segue que
Valor Médio vem que |fε − fε ′ | ≤
ε
Z
′
BR
|fε − fε ′ |dH
n−1
≤
Z
(3.9)
|Dn f|dx
Q
ε,ε
′
′
Concluímos assim que fε é uma sequência de Cauchy em L1 (BR ). Segue portanto que
′
a mesma converge a uma função f+ ∈ L1 (BR )
Tome agora g ∈ C10 (CR ; Rn ). Usando integração por partes vem que
Z
fdivgdx = −
QR,ε
Z
QR,ε
hg, Dfi +
Z
′
BR
f+ gnε dHn−1
Tomando ε → 0 obteremos a sentença (3.7)
Provemos agora a sentença (3.6)
Z
|f(z) − f+ (y)|dz =
Zρ
Z
dη |f(η, t) − f+ (y)|dt ≤
′
ZBρ (y)
Z0ρ
Z
Zρ
+
dη |f(η, t) − f (η)|dt +
dη |f+ (η) − f+ (y)|dt =
′
′
BZρ (y)
0
ZBρ (y)
Z0ρ
dη |f(η, t) − f+ (η)|dt + ρ
|f(η, t) − f+ (η)|dη
C+
ρ (y)
′
Bρ (y)
0
′
Bρ (y)
(3.10)
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA55
Pelo Teorema de Lebesgue-Besicovitch (3.2.1)segue que
1−n
lim ρ
ρ→0
Z
|f(z) − f+ (y)|dη = 0
(3.11)
′
Bρ (y)
′
para y ∈ BR Hn−1 -quase sempre. Em contrapartida por (3.9) usando a Fórmula da coarea
teremos
Zρ
dt
0
Z
+
|f(η, t) − f (η)|dη ≤ ρ
′
Bρ (y)
Z
(3.12)
|Df|
C+
ρ (y)
Assim utilizando (3.10) e (3.12) obteremos
−n
ρ
Z
+
C+
ρ (y)
1−n
|f(z) − f (y)|dz ≤ ρ
Z
1−n
|Df| + ρ
C+
ρ (y)
Z
|f(z) − f+ (y)|dη
Bρ′ (y)
Como |Df| é uma medida de Radon Positiva segue do Lema anterior (3.2) que para
′
y ∈ BR Hn−1 -quase sempre
1−n
lim ρ
ρ→0
Z
(3.13)
|Df| = 0
C+
ρ (y)
Para finalizar a prova basta usarmos (3.11) e assim obteremos o resultado desejado.
′
Observação 3.2. A função f+ é chamada o TRAÇO de f em BR e
1
f (y) = lim +
ρ→0 |Cρ (y)|
+
Z
f(z)dz
C+
ρ (y)
′
A função f+ é única a menos de um conjunto de medida Hn−1 ⌊∂BR nula.
′
Interpretaremos f+ como o “valor de fronteira” de f sobre ∂BR
+
Proposição 3.1. Sejam f ∈ BV(C+
R ) e {fj } ⊂ BV(CR ) uma sequência convergindo a f em
L1 (C+
R ) tal que
lim
Z
j→∞ C+
R
|Dfj | =
Z
|Df|.
C+
R
Então lim fj + = f+ em L1 (B R )
′
j→∞
Proof: Usando (3.9) e a fórmula da coarea temos para 0 < β < R e Qβ = QR,β ,
1
β
Zβ
0
dt
Z
+
′
BR
|f (y) − f(y, t)|dt ≤
Z
|Df|
Qβ
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA56
Z
1 β
f(y, t)dt, então
Se fβ (t) =
β 0
Z
+
′
BR
|f (y) − fβ (y)|dy ≤
Z
|Df|
(3.14)
Qβ
Da sentença acima segue que
Z
Z
′
BR
|f+ (y) − f+
j (y)|dt ≤
+
′
ZB R
Qβ
Z
f+
j (y)|dy
|f (y) − fβ (y)|dy +
|fj,β (y) −
′
Z
Z BR
|Df| +
|Dfj | +
|fj,β (y) − f+
j (y)|dy
Qβ
+
Z
′
BR
|fβ (y) − fj,β (y)|dy ≤
(3.15)
′
BR
Utilizando as Propriedades da integral, o Teorema de Fubini e o fato que 0 < β < R
obteremos a seguinte expressão
Zβ
Z
1
1 β
dy ≤
|fβ (y) − fj,β (y)|dy =
f(y,
t)dt
−
f
(y,
t)dt
j
′
′ β
β
BRZ
BR
0
0
Z
Z
1
1
βdt
|f(y, t) − fj (y, t)|dt ≤
|f − fj |dx → 0 quando j → ∞
′
β 0
β C+R
BR
Z
Z
Pela Proposição (Semicontinuidade Superior) (2.1) temos
lim
Z
j→∞ Q
β
|Dfj | =
Z
|Df|
Qβ
para quase todos os β.
Então a útima sentença de (3.15) fica
lim sup
j→∞
Z
+
|f −
′
BR
f+
j |dy
≤2
Z
|Df|
Qβ
para quase todos os β. Agora basta tomar β → 0 e obteremos enfim o resultado desejado.
Observação 3.3. Sejam CR − = BR × (−R, 0) e f ∈ BV(C−
R ). Analogamente poderemos
′
′
definir f− ∈ L1 (BR ) o qual também satisfaz os Lemas e Proposições acima.
+
Proposição 3.2. (Extensão) Sejam f1 ∈ BV(C+
R ) e f2 ∈ BV(CR ). Defina uma função
f : CR → R por
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA57
f(x) =
Então f ∈ BV(CR ) e
Z
+
f1 em C+
R
f2 em C−
R
−
|f − f |dH
B
′
n−1
=
R
Z
(3.16)
|Df|
B
′
R
Proof De (3.7) e o análogo para f2 tem-se
Z
fdivgdx = −
CR
Z
C+
R
hg, Dfi +
Z
′
BR
(f+ − f− )gn dHn−1
Como o lado direito da identidade acima é limitado se |g| ≤ 1 tem-se f ∈ BV(CR ) e
Z
fdivgdx = −
CR
de modo que −
Z
′
BR
Z
CR
hg, Dfi = −
hg, Dfi =
Z
′
BR
Z
C+
R
hg, Dfi −
Z
C−
R
hg, Dfi −
Z
′
BR
hg, Dfi
(f+ − f− )gn dHn−1 para g ∈ C10 (CR : Rn )
Ao aplicarmos a definição de Variação total as duas sentenças acima seguirá o
resultado.
Observação 3.4. Sejam Ω ⊂ Rn conjunto aberto bom bordo ∂Ω Lipschitz contínuo
e f ∈ BV(Ω). Se x0 ∈ ∂Ω então com um movimento rígido, isto é, a composta de
uma translação com uma rotação, podemos considerar x0 = 0, e mais, suponhamos que
numa vizinhança de x0 = 0 tenhamos ∂Ω = {(y, t) ∈ Rn ; y ∈ A, t = w(y)}, onde
A é uma vizinhança de 0 em Rn−1 e w : A → R é uma função Lipschitz contínua
tal que se (y, t) ∈ Ω então t > w(y). Se puzermos ξ = (η, τ) = (y, t − w(y)) e
g(ξ) = f(η, τ + w(η)) = f(y, t), então g ∈ BV(C+
R ) para algum R > 0, pois por hipótese
BV(Ω)
′
Se g+ é o traço de g em BR , então definimos o traço de f em
′
SR = {ξ = (η, w(η)); η ∈ BR }
como
ϕ(ξ) = f+ (η, w(η)) = g+ (η).
Assim teremos o seguinte
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA58
Teorema 3.2.2. (Teorema do Traço) Sejam Ω ⊂ Rn conjunto aberto com bordo ∂Ω
Lipschitz contínuo e f ∈ BV(Ω). Então existe uma função Tf ∈ L1 (∂Ω) tal que para
x ∈ ∂Ω Hn−1 - quase sempre
−n
lim ρ
ρ→0
Z
Mais ainda, para toda g ∈ C0 1 (Rn ; Rn ) ,
Z
(3.17)
|f(z) − Tf(x)|dz = 0
Bρ (x)∩Ω
fdivgdx = −
Ω
Z
Ω
hg, Dfi +
Z
∂Ω
−
onde →
η é a normal unitária exterior a ∂Ω.
→
Tfhg, −
η idHn−1
(3.18)
Nota 3.1. A função Tf acima é chamada de Traço de f em ∂Ω, a mesma está
unicamente determinada salvo um conjunto de medida Hn−1 ⌊∂Ω nulo.
sentença informa que
Tf(x) = |Br (x) ∩ Ω|
−1
Z
A primeira
fdy.
Br (x)∩Ω
Além disso temos que Tf = f|∂Ω Hn−1 −quase sempre. Nós interpretaremos Tf como os
“valores de fronteira” de f em ∂Ω. A segunda sentença é uma versão da Fórmula de
Integração por partes (Teorema de Gauss-Green).
Proof: Este resultado será consequência dos seguintes fatos
Z
1−n
n−1
i. Para H -quase sempre x ∈ ∂Ω lim ρ
|Df| = 0
ρ→0
Bρ (x)∩Ω
Esta é consequência imediata de (3.13)
ii. Fixe x ∈ ∂Ω tal que
lim ρ
ρ→0
De
acordo
1−n
Z
1−n
|Df| = 0 e lim ρ
ρ→0
Bρ (x)∩Ω
com
o
item
anterior
e
Z
o
|Tf − Tf(x)|dHn−1 = 0
Bρ (x)∩Ω
Teorema
da
Diferenciação
Lebesgue-Besicovitch (3.2.1) x ∈ ∂Ω Hn−1 -quase sempre.
Seja h = h(ρ) = 2max(1, 4Lip(γ))ρ onde γ : Rn−1 → R é tal que
′
max
|γ(y − xn )| ≤
′
′
|x −y |≤ρ
h
,
4
x ∈ ∂Ω e existem ρ, h > 0, pois ∂Ω é Lipschitz, C(ρ) = C(x, ρ, h) cilindro.
de
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA59
Para ρ sufientemente pequeno, podemos obter a estimativa
Z
|Tf − Tfε |dH
n−1
∂Ω∩C(r)
≤C
Z
|Df| 0 < ε <
C(r)∩Ω
h(r)
2
Usando a fórmula da Coárea podemos obter a estimativa
Z
′
B(x,ρ)∩Ω
′
|Tf(y , γ(y ))|dy ≤ Cρ
Z
|Df|
C(r)∩Ω
Portanto,
−n
ρ
C
Z
B
Zρ (x)∩Ω
|f(z) − Tf(x)|dy ≤
n−1
C
+ n
ρ
Z
′
′
|Tf − Tf(x)|dH
|Tf(y , γ(y ))|dy ≤
Bρ (x)∩ΩZ
B(x,ρ)∩Ω
C
o(1) + n−1
|Df| = o(1) quando ρ → 0
ρ
C(r)∩Ω
ρn−1
salientamos que fora usado fortemente (3.13)
Um resultado similar a Proposição (3.1) será
Teorema 3.2.3. Sejam Ω ⊂ Rn conjunto aberto e limitado com bordo ∂Ω Lipschitz
contínuo, {fj } ⊂ BV(Ω) e f ∈ BV(Ω), com {fj } uma sequência de funções satisfazendo
lim
Z
j→∞ Ω
|fj − f|dx = 0 e
lim
Z
j→∞ Ω
|Dfj | =
Z
|Df|
Ω
Então se ϕj e ϕ são os traços de fj e f respectivamente, teremos
lim
Z
j→∞ ∂Ω
|ϕj − ϕ|dHn−1 = 0
Proof: Mutatis mutandis a demonstração da Proposição (3.1).
Observação 3.5. Da definição de Traço, do Teorema de Aproximação (2.5.1) e da
Observação (2.8) segue que se ∂Ω é Lipschitz contínua, então para toda f ∈ BV(Ω)
existe uma sequência {fj } ⊂ C∞ (Ω) tal que
lim
Z
j→∞ Ω
|fj − f|dx = 0 e
+
e os traços f+
j = f para todo j em ∂Ω.
lim
Z
j→∞ Ω
|Dfj | =
Z
|Df|
Ω
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA60
Observação 3.6. Se A ⊂⊂ Ω é um aberto com bordo ∂A Lipschitz contínuo, então f|A e
f|Ω−A (pertencentes a BV(A) e BV(Ω − A) respectivamente) terão traços em ∂A os quais
+
serão denotados f|−
A e f|A respectivamente. Então:
−n
lim ρ
ρ→0
−n
lim ρ
ρ→0
Z
Z
Br ho(x)∩A
n−1
|f(z) − f|−
− quase sempre
A (x)|dz para x ∈ ∂A H
Br ho(x)−A
n−1
|f(z) − f|+
− quase sempre
A (x)|dz para x ∈ ∂A H
e como na demonstração da Proposição de Extensão (3.2)
Z
|(f|+
A
−
n−1
f|−
A )|dH
=
∂A
Z
|Df|
(3.19)
∂A
Mais precisamente da demonstração da Proposição (3.2) concluímos que
−
n−1
Df = (f|+
A − f|A )νdH
−
em ∂A, onde ν é a normal unitária exterior. Ou seja, essencialmente, f|+
A − f|A é a
derivada de Radon-Nikodym de Df com respeito a medida |Df| = νdHn−1 como veremos
no próximo capítulo.
Observação 3.7. Se A e Ω são abertos com A ⊆ Ω, ∂A Lipschitz contínuo e f ∈ BV(A),
então definimos F : Ω → R por
F(x) =
f(x) se x ∈ A
0
se x ∈ Ω − A
Z
Z
−
+
Então F|−
A = f|A e F|A = 0 e por (3.19)
Z
|Df| =
Ω
|Df| +
A
n−1
|(f|−
A )|dH
∂A∩Ω
Se A = Bρ , Ω = BR (ρ < R), E um conjunto de Caccioppoli e f = χE , teremos para
n−1
todo ρ (e mais precisamente àqueles ρ para os quais χ−
-quase sempre em
E,ρ = χE H
∂Bρ ) obteremos particularmente a seguinte sentença
Per(E ∩ Bρ , BR ) = Per(E, Bρ ) + Hn−1 (∂Bρ ∩ E).
(3.20)
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA61
Idem argumento acima, se puzermos A = BR − Bρ , Ω = BR teremos
Per(E − Bρ , BR ) = Per(E, BR − Bρ ) + Hn−1 (∂Bρ ∩ E) e
(3.21)
Per(E ∪ Bρ , BR ) = Per(E, BR − (E ∪ Bρ ), BR )
= Per((BR − E) ∩ (BR − Bρ ), BR )
(3.22)
= Per(E, BR − Bρ ) + Hn−1 (∂Bρ − E)
para quase todo ρ < R
Vejamos agora a recíproca do Teorema (3.2.2)
′
Proposição 3.3. (Gagliardo) Seja ϕ ∈ L1 (BR ) com suporte compacto. Para todo ε > 0
existe uma função f ∈ W 1,1 (C+
R ) com traço ϕ em BR tal que
′
Z
Z
C+
R
C+
R
|f|dz ≤ ε
Z
′
BR
|Df|dz ≤ (1 + ε)
′
|ϕ|dHn−1
(3.23)
Z
(3.24)
|ϕ|dHn−1
′
BR
′
1
Proof: Seja {ϕk } ⊂ C∞ (BR ) tais
queε ϕk → ϕ em L (BR ). Assuma que ϕ0 = 0 e
X
′
kϕk, onde k . k denota a norma em L1 (BR ).
kϕk − ϕk+1 k ≤ 1 +
kϕk k ≤ 2kϕk e
2
k≥0
Seja {tk } uma sequência decrescente de números reais convergindo a zero. Para z =
(x, t) ponha
0
se t > t0
f(z) = f(x, t) =
t − tk+1
tk − t
ϕk (x) +
ϕk+1 (x) se tk−1 < t < tk
tk − tk+1
tk − tk+1
Para tk+1 < t < tk temos
|Di f| ≤ |Di ϕk | + |Di ϕk+1 | i = 1, 2, ...., n − 1
|Dn f| = |ϕk − ϕk+1 |(tk − tk+ )−1 e portanto
Z
X
X
|Df|dz ≤
kϕk − ϕk+1 k +
(kDϕk k + kDϕk+1 k)(tk − tk+1 ).
C+
R
k≥0
k≥0
Z
X
Mais ainda
|f|dz ≤
(kϕk k + kϕk+1 k)(tk − tk+ ) ≤ 4kϕkt0
C+
R
k≥0
CAPÍTULO 3. TEORIA DO TRAÇO PARA FUNÇÕES DE VARIAÇÃO LIMITADA62
Se escolhermos tK tal que 4t0 < ε e tk − tk+1 ≤
de forma imediata (3.23) e (3.24)
εkϕk k
2−k−2 teremos
1 + kDϕk k + kDϕk+1 k
Usando técnicas de partição diferenciável da unidade podemos demonstrar o seguinte
Teorema 3.2.4. Sejam Ω ⊂ Rn conjunto aberto e limitado com bordo ∂Ω Lipschitz
contínuo e ϕ ∈ L1 (∂Ω). Para todo ε > 0 existe uma função f ∈ W 1,1 (Ω) tendo ϕ como
traço em ∂Ω e tal que
Com A = A(∂Ω).
Z
Z
|f|dz ≤ εkϕk
(3.25)
|Df|dz ≤ Akϕk
(3.26)
Ω
Ω
Observação 3.8. Podemos mostrar da construção de f que o suporte da mesma pode
ser tomado numa vizinhança de ∂Ω. Se além disso ∂Ω for de classe C1 , podemos tomar
A=1+ε
Capítulo
4
A Fronteira Reduzida
Conteúdo
Fronteira Reduzida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
4.1.1
O Lema de Gauss-Green . . . . . . . . . . . . . . . . . . . . . . . . .
66
4.1.2
Densidade no sentido da medida teórica . . . . . . . . . . . . . . . . .
67
4.2
Blow-up da Fronteira Reduzida . . . . . . . . . . . . . . . . . . . . . . . . . .
72
4.3
Semi-Espaço Tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
4.1
Q
uando consideramos funções em BV de fato estaremos considerando classes de
equivalência de funções, pois não há alterações nas mesmas se de fato o que for
manipulado seja um conjunto de medida nula. Na mesma linha de pensamento
ao trabalharmos com conjuntos de Caccioppoli o perímetro e outras propriedades dos
mesmos serão imperceptíveis do ponto de vista de teoria da medida, se as alterações
forem realizadas em um conjunto de medida nula.
4.1 Fronteira Reduzida
De Giorgi definiu a chamada fronteira reduzida para conjuntos de Caccioppoli, ∂∗ E,
como o conjunto de pontos x no qual derivada de Radon-Nikodym de DχE existe com
respeito a medida de variação |DχE | e é igual a νE (x) com |νE (x)| = 1, e pode ser escrito
como a união enumerável de subconjuntos compactos de hipersuperfícies de classe C1 , a
menos de um conjunto de medida |DχE |−nula.
Salientamos também a importância da fronteira reduzida no estudo de Teoria de
Regularidade de Equações Diferenciais Parciais Elípticas, em particular, o estudo da
regularidade de Problemas de Fronteira Livre (Veja por exemplo Caffarelli-Salsa [87],
Caffarelli [88] e Teixeira [45].)
CAPÍTULO 4. A FRONTEIRA REDUZIDA
64
e
Proposição 4.1. Se E é um conjunto Boreliano, então existe um conjunto Boreliano E
equivalente a E, ou seja, difere somente por um conjunto de medida nula, tal que
e ∀ ρ>0
e ∩ B(x, ρ)| < wn ρn 1 ∀ x ∈ ∂E
0 < |E
(4.1)
onde wn é a medida da bola unitária em Rn .
Proof: Defina
E0 = {x ∈ Rn ; ∃ρ > 0 com |E ∩ B(x, ρ)| = 0}
e
E1 = {x ∈ Rn ; ∃ρ > 0 com |E ∩ B(x, ρ)| = |B(x, ρ)| = wn ρn }
Seja x ∈ E0 , então existe ρ > 0 tal que |E ∩ B(x, ρ)| = 0. Seja agora y ∈ B(x, ρ),
tomando ρ0 = ρ − |x − y| > 0 tem-se B(y, ρ0 ) ⊆ B(x, ρ) e |B(y, ρ0 ) ∩ E| = 0. Assim
B(x, ρ) ⊆ E0 e segue que E0 é aberto. De modo análogo se verifica que E1 é aberto.
Afirmação:
|E0 ∩ E| = 0 e |E1 − E| = 0.
Vejamos: Para cada x ∈ E0 escolha ρ > 0 tal que |E ∩ B(x, ρ)| = 0. Então
{B(x, ρ); x ∈ E0 }
forma uma cobertura por meio de abertos de E0 e assim existe uma sequência {xi } em E0
tal que
E0 ⊆
e portanto
[
i≥1
B(xi , ρi )| e |E ∩ B(x, ρi )| = 0
|E0 ∩ E| ≤ |
[
i≥1
B(xi , ρi ) ∩ E| = 0
De maneira análoga podemos mostrar que |E1 − E| = 0
e é equivalente a E e, dado que E1 e E0 são
e = (E ∪ E1 ) − E0 . Então E
Agora tomemos E
e então x ∈
abertos, se x ∈ ∂E
/ E1 ∪ E0 e portanto segue-se o resultado.
Observação 4.1. Tendo em vista a Proposição (4.1) poderemos assumir que um conjunto
de perímetro finito é um representante dessa classe; logo satisfaz a desigualdade (4.1).
Assim não haverá ambiguidade em falarmos em fronteira topológica ∂E de um conjunto
de perímetro finito E; tendo em vista nossas considerações sobre conjuntos mensuráveis
modificações em conjuntos de medida nula não terão influência.
1
e tem densidade uniformente positiva
De fato como veremos mais adiante o conjunto E
CAPÍTULO 4. A FRONTEIRA REDUZIDA
65
Agora nos introduziremos um conceito devido a Ennio De Giorge2 a qual faz referência
a um subconjunto particular da fronteira de um conjunto de Caccioppoli, está será
conhecida como fronteira reduzida e será denotada por ∂∗ E. A importância deste está
intrinsecamente ligada em teoria dos perímetros, ou estudo de conjuntos de Caccioppoli, ao
estudo da regularidade da fronteira de conjuntos minimizantes , conjuntos minimais. Para
os próximos capítulos nosso objetivo se concentrará em mostrar que para um conjunto
minimizante E, a fronteira reduzida ∂∗ E é uma variedade (n − 1)−dimensional, analítica,
de classe C1,α . Ao final daremos uma estimativa para o “tamanho” do conjunto singular
∂E − ∂∗ E, ou seja, segundo o nosso contexto, sua dimensão de Hausdorff.
Definição 4.1. Um ponto x ∈ ∂E, pertencerá a fronteira reduzida de um conjunto E, ∂∗ E,
se
Z
|DχE | > 0 ∀ ρ > 0
(4.2)
νE (x) = lim νρ (x) existe
(4.3)
|νE (x)| = 1
(4.4)
B(x,ρ)
ρ→0
Z
onde νρ = Z
DχE
B(x,ρ)
e
|DχE |
B(x,ρ)
Note que, do Teorema de Lebesgue-Besicovitch sobre diferenciação de medidas (Veja
Apêndice) segue que νE (x) existe e |νE (x)| = 1 para x ∈ Rn |DχE |-quase sempre, pois
x ∈ ∂∗ E é um ponto do conjunto de Lebesgue de νE , de fato
1
2|DχE |(Bρ (x))
Z
|DχE |(Bρ (x))
|νE (y) − νE (x)| d|DχE |(y) = 1 − νE (x),
DχE (Bρ (x))
Bρ (x)
2
,
o que prova que x ∈ ∂∗ E é um ponto do conjunto de Lebesgue de νE , relativamente a
|DχE |, e, além disso pelo Teorema de Radon-Nikodym (Decomposição Polar) temos que
DχE = ν|DχE |
ou seja, νE é essencialmente a derivada de Radon-Nikodym de DχE com respeito a medida
|DχE |. O vetor νE (x) é denotado o normal exterior unitário generalizado a E em x
2
De fato Renato Caccioppoli já concebia a idéia de fronteira reduzida como a derivada de
Radon-Nikodym de µZ com respeito aZmedida de variação |µ|, onde µ é uma medida de Radon vetorial
divφ(x)dx =
φ.dµ ∀ φC10 (Rn ), com E sendo um conjunto de Caccioppoli.
finita a qual verifica
E
∂E
Porém coube a De Giorgi a formalização deste contexto conforme se encontra nesse tratado.
CAPÍTULO 4. A FRONTEIRA REDUZIDA
66
B(x,r)
v(E)
E
v
Figura 4.1: Normal a E e a B(x,r)
Observação
4.2. De acordo com o Teorema da diferenciação de Lebesgue-Besicovitch
Z
|DχE | = 0 (Veja por um instante Wheeden- Zygmund [86])
temos
Rn −∂∗ E
4.1.1 O Lema de Gauss-Green
Nesta direção temos a seguinte versão preliminar mais elaborada do conhecido Teorema
de Gauss-Green (Teorema da Divergência):
Lema 4.1. Seja φ ∈ C10 (Rn ; Rn ). Então para cada x ∈ Rn ,
Z
divφdy =
E∩Br (x)
Z
φ.νE d(|DχE |) +
Br (x)
Z
φ.νdHn−1
E∩∂Br (x)
para r > 0 L1 −quase sempre, aqui ν denota o vetor normal unitário exterior à ∂Br (x)
Proof: Assuma que h : Rn → R é diferenciável, então
Z
div(hφ)dy =
E
Z
hdivφdy +
E
Z
Dh.φdy
E
Assim pela versão clássica do Teorema de Gauss-Green (Teorema da Divergência)
Z
hφ.νE d(|DχE |) =
Rn
Z
hdivφdy +
E
Z
Dh.φdy
(4.5)
E
Ao utilizarmos um argumento de aproximação a sentença (4.5) se verifica também
para
hε (y) = gε (|y − x|),
onde
gε (s) =
1
r−s+ε
,
ε
0,
se 0 ≤ s ≤ r
se r ≤ s ≤ r + ε
se s ≥ r + ε
CAPÍTULO 4. A FRONTEIRA REDUZIDA
67
Note também que
′
gε (s) =
E dessa forma
Dhε (y) =
0
se 0 ≤ s ≤ r ou s > r + ε
− 1 , se r < s < r + ε.
ε
se |y − x| < r ou |y − x| > r + ε
0
− y−x , se r < |y − x| < r + ε.
ε|y−x|
Ao tomarmos h = hε em (4.5) teremos:
Z
Z
1
hε φ.νE d(|DχE |) = hε divφdy −
ε
Rn
E
Z
φ.
E∩{y;r<|y−x|<r+ε}
y−x
dy
|y − x|
Fazendo ε → 0 na sentença acima e recordando que das coordenadas polares providas
da Fórmula da Área (Veja Evans-Gariepy [6] pag. 118) segue que
Z
φ.νE d(|DχE |) =
Br (x)
Z
divφdy −
E∩Br (x)
Z
φ.νdHn−1
E∩∂Br (x)
para L1 quase sempre r > 0.
Observação 4.3. Se ∂E é uma hipersuperfície segundo a definição de Ennio De Giorgi
então ao tomarmos |DχE | como a variação total da medida a valores vetoriais DχE =
(D1 χE , ..., Dn χE ) teremos ν(x) como a densidade vetorial de DχE com respeito a |DχE | no
ponto x
4.1.2 Densidade no sentido da medida teórica
Definição 4.2. Seja A um subconjunto do Rn , 1 ≤ m ≤ n, x ∈ Rn . Definimos a
Densidade m−dimensional Θm (A, x) do conjunto A no ponto x como
Hm (B(x, ρ))
ρ→0
wm ρm
Θm (A, x) = lim
Note que para qualquer subconjunto A ⊂ Rn , Θm (A, x) = Θm (Hm ⌊A, x), onde
Θm (Hm ⌊A, x) é a medida definida por (Hm ⌊A)(E) = Hm (A ∩ E).
Para todo α ∈ [0, 1], denote por Eα o conjunto de todos os x ∈ Rn de densidade α,
ou seja, tais que Θm (A, x) = α. Em particular, E1 é chamado medida interior no sentido
CAPÍTULO 4. A FRONTEIRA REDUZIDA
68
geométrico da medida e E0 , a medida exterior no sentido geométrico da medida. Além
disso, escolhendo f = χE no Teorema de Lebesgue Besicovith obteremos
Θn (E, x) =
1, se x ∈ E
0, se x ∈ Rn − E
Assim, podemos imaginar E0 como o “exterior” de E e E1 como o “interior” de E.
Exemplo 4.1. O cone C = {x2 + y2 = z2 } tem densidade 2−dimensional
Θ2 (C, x) =
1, para x ∈ C − {0}
0, para x ∈
/C
√
2, para x = 0
Figura 4.2: O cone {x2 + y2 = z2 } tem densidade 1 em quase todo ponto exceto no vértice, o
√
qual tem densidade 2.
Exemplo 4.2. Vejamos um exemplo gráfico:
Figura 4.3: O gráfico da função u, a qual assume valores 2h no intervalo (2−h , 2
nos demais pontos. Sua densidade na origem é zero.
−h (h2 +2)
h2 +1
), e é 0
CAPÍTULO 4. A FRONTEIRA REDUZIDA
Exemplo 4.3.
69
i. Sejam ∂E uma hipersuperfície de classe C1 e x ∈ ∂E. Assim segue
da Observação (3.6) ao tomarmos A = E e f = χE que
DχE = νdHn−1 em ∂E
onde ν é a normal unitária interior à ∂E. Além disso pelo Lema (2.2) segue que
spt(DχE ) ⊆ ∂E e dessa forma
Z
DχE =
B(x,ρ)
Z
νdHn−1
B(x,ρ)∩∂E
Em contrapartida da equação (2.3)
Z
B(x,ρ)
|DχE | = Hn−1 (B(x, ρ) ∩ ∂E)
e dessa forma
νρ (x) =
Z
νdHn−1
B(x,ρ)∩∂E
n−1
H (B(x, ρ)
∩ ∂E)
Portanto, dado que ν é contínua em ∂E, lim νρ (x) = ν(x). como já tínhamos
ρ→0
∂E ⊆ ∂∗ E segue do mostrado acima que ∂E = ∂∗ E e ν(x) é a normal unitária
exterior a ∂E em x desde que exijamos que ∂E seja uma hipersuperfície de classe C1
Observação 4.4. Se E é um domínio Lipschitz , ainda teremos DχE = νdHn−1
x ∈ ∂E Hn−1 −quase sempre e Hn−1 (∂E − ∂∗ E) = 0
Ilustremos esta argumentação com o seguinte exemplo:
ii. Seja E o quadrado unitário em R2 , então as condições (4.2) e (4.3) são satisfeitas
para cada x ∈ ∂E, como também (4.4) é satisfeita, exceto nos vértices do quadrado,
1
onde |ν| = √
2
Observação 4.5. Dado em geral um polígono regular P de n lados, ou seja, um
eneágono regular, temos que o mesmo satisfaz como acima as condições (4.2) e (4.3),
como também é satisfeita a condição (4.4) salvo nos vértices do polígono onde se tem
o
180o (n−2)
é o ângulo interno do polígono P. De
n
o
o
180o
o
sin(90 ) cos(− n ) + sin(− 180
) cos(90o ) = cos( 180
).
n
n
|ν| = cos( 180
) = sin( α2 ), onde α =
n
o
)=
fato sin( α2 ) = sin(90o − 180
n
Tal argumentativa faz sentido, pois quando n → ∞ P se “aproxima” cada vez mais
de um círculo e neste |ν| = 1, justificando assim cos( nπ ) → 1 quando n → ∞.
CAPÍTULO 4. A FRONTEIRA REDUZIDA
70
Figura 4.4: Blow-up no Hexágono regular
Observação 4.6. As propriedades dos conjuntos os quais consederaremos são invariantes
por translações e rotações. Por essa razão assumiremos que a origem pertence à ∂E ou que
o eixo - x1 é normal à ∂E e dessa forma por rotações e translação apropriadas poderemos
provar resultados similares para quaisquer pontos em ∂E
Lema 4.2. (De Giorgi - Densidade.) Suponha E ⊆ Rn é tal que 0 ∈ ∂E e existe um
número ρ tal que para todo ρ < ρ
Z
|DχE | > 0
Bρ
Z
DχE Bρ
Z
|ν(0)| =
≥q>0
|DχE |
Bρ
Então para todo ρ < ρ
ρ−n |E ∩ Bρ | ≥ C1 (n, q) > 0
(4.6)
ρ−n |(Rn − E) ∩ Bρ | ≥ C2 (n, q) > 0
(4.7)
Z
(4.8)
1−n
0 < C3 (n, q) ≤ ρ
Bρ
|DχE | ≤ C4 (n, q),
onde C1 , C2 ,C3 e C4 são constantes.
Proof: De (3.18), como na prova de (3.20), podemos mostrar que para quase todo ρ < ρ
CAPÍTULO 4. A FRONTEIRA REDUZIDA
0=
Z
Z
χE∩Bρ =
D
71
DχE +
Bρ
Z
∂Bρ
assim segue que
Z
|DχE | ≤
Bρ
Z
∂Bρ
−
→
η χE dHn−1
χE dHn−1 = Hn−1 (E ∩ ∂Bρ )
Por outro lado, para todo ρ < ρ, pela hipótese segue que
Z
Portanto,
Z
Bρ
Z
1 |DχE | ≤ DχE q Bρ
Bρ
|DχE | ≤
1 n−1
H (E ∩ ∂Bρ ) ≤ C4 ρn−1
q
para quase todo ρ < ρ e pelo Teorema de Semicontinuidade Inferior (2.3.3) a mesma
se dará para todo ρ < ρ. Isto prova a segunda parte de (4.8). Por (3.20) se puzermos
Eρ = E ∩ Bρ ter-se-á para todo ρ
Per(Eρ ) = Per(E, Bρ ) +
Z
χE dHn−1
∂Bρ
Contudo, conforme acima
1
Per(E, Bρ ) ≤
q
Z
χE dHn−1
∂Bρ
para quase todo ρ < ρ. Assim,
Per(Eρ ) ≤ C5
Z
χE dHn−1
∂Bρ
e dessa forma segue da Desigualdade Isoperimétirca (2.1) que
|Eρ |
1
1− n
≤ C6
Z
χE dHn−1 .
∂Bρ
Por outro lado, se definirmos g(ρ) como a função monótona de ρ, g(ρ) = |Eρ |,
g(R) =
Z
χE dx =
BR
ZR
0
dρ
Z
χEdHn−1
∂Bρ
e assim g(ρ) é absolutamente contínua, uma vez que possui uma primitiva segundo o
CAPÍTULO 4. A FRONTEIRA REDUZIDA
72
Teorema Fundamental do Cálculo da Integral de Lebesgue (Veja Apêndice), com
′
g (ρ) =
Z
χE dHn−1
∂Bρ
Então segue disto juntamente com o fato que g(ρ) > 0 se ρ > 0 que
′
g (ρ) ≥
1
1
g(ρ)1− n , ∀ρ < ρ
C6
e assim
g(ρ) ≥
ρ
nC6
n
provando (4.6).
A prova de (4.7) é similar bastando para tanto notar que χRn −E = 1 − χE . Agora
somente nos resta provar a desigualdade do lado esquerdo de (4.8). Mas, esta segue do
que já fora provado, ou seja, (4.6), (4.7) e da Desigualdade Isoperimétrica (2.1).
Note que em particular, se 0 ∈ ∂∗ E o número ρ do Lema acima existe.
Observação 4.7. A interpretação do Lema acima consiste em dizer que sendo ν(0), 0 ∈
∂E, respectivamente ν(x), x ∈ ∂E não degenerado, então os pontos de ∂E tem densidade
positiva, além disso, as sentenças (4.6) e (4.7) dão uma estimativa do percentual dessa
densidade no interior e no exterior do conjunto E ∩ Bρ . A última sentença denota o
Perímetro de E normalizado em Bρ , e, este pelo resultado acima é limitado.
4.2 Blow-up da Fronteira Reduzida
Introduziremos um conceito amplamente difundido em matemática: a técnica de
Blow-up. Blow-up é uma técnica empregada em Análise e Geometria a fim de investigar,
por exemplo, as propriedades locais de vários objetos matemáticos: em suma obteremos
informações acerca do comportamento de uma superfície na proximidade de um ponto
por meio de sua observação através de escalas bem maiores, ou seja, um processo de
escalonamento do mesmo. Em alguns casos interessantes, esse “processo de aumento”
pode ser bastante útil a fim de ajudar a descobrir algumas propriedades assintóticas
notáveis.
Em teoria de conjuntos de perímetro localmente finito (conjuntos de Caccioppoli) está
técnica consiste em “alargar” um dado conjunto de perímetro finito em Rn com respeito a
um ponto x ∈ ∂∗ E, assim construindo uma sequência de dilatações com “fator de aumento”
CAPÍTULO 4. A FRONTEIRA REDUZIDA
73
crescendo a ∞. Por meio de resultados de compacidade, poderemos obter dessa sequência
um conjunto limite F, o qual será chamado o Blow-up de E com respeito a x.
Finalmente, mostraremos que iniciendo de um ponto da fronteira reduzida , isto é,
x ∈ ∂∗ E, o conjunto limite provido do Blow-up será um semi-espaço tangente a E em x.
Definição 4.3. Para z ∈ ∂∗ E defina o hiperplano tangente
T (z) = {x ∈ Rn ; hν(z), x − zi = 0}
e os conjuntos
T + (z) = {x ∈ Rn ; hν(z), x − zi > 0}
T − (z) = {x ∈ Rn ; hν(z), x − zi < 0}
Teorema 4.2.1. (Procedimento de Blow-up da Fronteira Reduzida) Seja 0 ∈ ∂∗ E
e para todo t > 0 defina
Et = {x ∈ Rn ; tx ∈ E}.
Então quando t → 0+ o conjunto Et “converge” para T + (0) e mais ainda, para todo
conjunto A tal que Hn−1 (∂A ∩ T (0)) = 0
lim
Z
t→0 A
|DχEt | =
Z
A
|DχT + | = Hn−1 (A ∩ T (0))
(4.9)
Proof: Pelo mesmo raciocínio empregado no Lema anterior (4.2) podemos supor sem
perda de generalidade que
ν1 (0) = −1, ν2 (0) = . . . = νn (0) = 0
e assim
T + = T + (0) = {x ∈ Rn ; x1 < 0}.
É suficiente agora mostrarmos que para toda sequência {tj } → 0 possui uma
subsequência {sj } tal que Esj → T + , e se denotarmos Ej = Esj , então
Z
|DχEj | =
A
Z
|DχT + |
A
Agora fazendo uma mudança de variáveis temos para todo ρ > 0,
Z
Z
DχEt = t
1−n
Bρ
|DχEt | = t
Bρ
Z
1−n
|DχE |,
(4.10)
|DχE |,
(4.11)
Btρ
Z
Btρ
CAPÍTULO 4. A FRONTEIRA REDUZIDA
74
segue portanto da definição dada a ν(0) que
Z
lim Z
D1 χ E t
Bρ
t→0
Z
lim Z
= ν1 (0) = −1
(4.12)
= 0 i = 2, 3, . . . , n.
(4.13)
|DχEt |
Bρ
Di χ E t
Bρ
t→0
|DχEt |
Bρ
Além disso de (4.11) e (4.8) obtemos que
lim sup
t→0
Z
Bρ
(4.14)
DχEt < ∞
Portanto a família de conjuntos {Eρ } é compacta com respeito a convergência L1 (B1 ).
Agora suponhamos ter uma sequência {tj } convergindo a 0; então, por (4.14) e o Teorema
de Compacidade para funções BV (2.6.2), existirá uma subsequência {sj } e um conjunto
de Caccioppoli C tal que se Ej = Esj , então χEj converge em L1loc (Rn ) para χC . Além disso,
pelo Teorema de De La Vallée Poussin (Veja Apêndice) podemos assumir que
lim
Z
j→∞ B
ρ
Dχ E j =
Z
para quase todo ρ (em particular para àqueles ρ os quais
e (4.15) que
lim
Z
j→∞ B
ρ
DχEj = − lim
Z
j→∞ B
ρ
(4.15)
DχC
Bρ
Z
D1 χ E j = −
|DχC | = 0). Segue de (4.12)
∂Bρ
Z
D1 χ C
Bρ
assim pelo Teorema de Semicontinuidade inferior (2.3.3) tem-se
Z
Bρ
|DχC | ≤ −
Z
D1 χ C
(4.16)
Bρ
e, pela definição de D1 χC conseguimos a igualdade em (4.16). Pela diferencição das
medidas (Veja Apêndice) obtemos
|DχC | + D1 χC = 0
e dessa forma Di χC = 0 i = 2, . . . , n.
Portanto χC só depende de x1 e além disso a mesma é uma função não-decrescente
nesta variável. Isto nos fornece a existência de um λ ∈ R tal que C = {x ∈ Rn ; x1 < λ}
CAPÍTULO 4. A FRONTEIRA REDUZIDA
75
Afirmação: Nessas condições temos λ = 0.
Suponha por objetivo de contradição que λ < 0; uma vez que χEj → χEC em L1loc (Rn )
temos
0 = |C ∩ B|λ| | = lim |Ej ∩ B|λ| | = lim s−n
j |E ∩ B|λ|sj |
j→∞
j→∞
a qual contradiz (4.6). De modo análogo se λ > 0, isso levará a uma contradição com
(4.74.6). Assim, λ = 0, C = T + e dessa forma
Z
|DχT + | = lim
Bρ
Z
j→∞ B
ρ
|DχEj |
(4.17)
para quase todo ρ
Para finalizarmos, tomemos A um conjunto aberto tal que
Z
∂A
|DχT + | = Hn−1 (T ∩ ∂A) = 0
Escolha ρ tal que A ⊆ Bρ no qual (4.17) seja verificado; então pela Proposição
(Semicontinuidade Superior) (2.1) nos obtemos a equação (4.9).
Figura 4.5: Blow-up do conjunto E
Nota 4.1. Nós descreveremos esse resultado por dizer que: o Blow up de E em 0 produz
o semi-espaço {x; xn > 0}, cuja fronteira é ortogonal ao vetor ν(0) = (0, ..., 0, 1). Neste
sentido diremos que o plano {x; xn = 0} é tangente a ∂E em 0.
CAPÍTULO 4. A FRONTEIRA REDUZIDA
76
4.3 Semi-Espaço Tangente
O Teorema (4.2.1) da seção anterior mostra que em algum sentido, T (0) é de fato um
plano tangente à superfície ∂E em 0. Tal fato ficará mais evidente no próximo Teorema
(4.3.1) devido a De Giorgi, onde estudaremso o comportamento do conjunto E nos pontos
de ∂∗ E, ou seja, constataremos que de fato T (0) é um plano tangente assintótico.
Teorema 4.3.1. (De Giorgi- Teorema do Plano Tangente Assintótico) Sejam
E ⊆ Rn e 0 ∈ ∂∗ E. Para ρ, ε > 0 defina
Sρ,ε = Bρ ∩ {x ∈ Rn ; |hν(0), xi| < ερ}
Então:
1−n
lim ρ
ρ→0+
Z
|DχE | = wn−1 ,
lim ρ−n |E ∩ Bρ ∩ T − | = 0,
(4.19)
lim ρ−n |(Bρ − E) ∩ T + | = 0,
(4.20)
wn
,
2
(4.21)
ρ→0+
ρ→0+
lim+ ρ−n |Bρ ∩ E ∩ T + | =
ρ→0
onde wn−1 é a medida da bola unitária em Rn−1
Proof: De (4.11) segue que
1−n
ρ
e similarmente
1−n
ρ
Z
Z
|DχE | =
Bρ
|DχE | =
Sρ,ε
Z
Z
|DχEρ |
B1
|DχEρ |
S1,ε
Por (4.9) temos,
lim
Z
ρ→0 S
1,ε
(4.18)
Sρ,ε
|DχEρ | = Hn−1 (S1,ε ∩ T (0)) = wn−1
Portanto segue a sentença (4.18).
Vejamos agora a prova de (4.19): Notemos inicialmente que
ρ−n |E ∩ Bρ ∩ T − | = |Eρ ∩ B1 ∩ T − |
CAPÍTULO 4. A FRONTEIRA REDUZIDA
77
segue dessa forma ao utilizarmos o Teorema anterior (4.2.1) (Eρ → T + em L1 )que
lim |Eρ ∩ B1 ∩ T − | = |T + ∩ B1 ∩ T − | = 0.
ρ→0
De maneira análoga se demonstra (4.20).
Dado que B(x, ρ)∩T + (x) = ((B(x, ρ)−E)∩T + (x))∪(B(xρ)∩E∩T + (x)) temos mediante
a sentença (4.20) que
lim inf
+
ρ→0
Similarmente, lim inf
+
ρ→0
1
|Bρ ∩ E|
|B(x, ρ) ∩ e ∩ T + (x)|
≥ lim+
= .
ρ→0
|Bρ |
|B(xρ)|
2
|Bρ − E|
1
≥ e consequentemente,
|Bρ |
2
lim+
ρ→0
|Bρ ∩ E|
|Bρ − E|
1
= lim+
=
ρ→0
|Bρ |
|Bρ |
2
v(E,x)
T+(x)
x
T(x)
E
T−(x)
Figura 4.6: Plano Tangente Aproximado (Assintótico).
Figura 4.7: O conjunto H1 −rectificável na figura tem dendidade 1 na origem, e sua “linha”
tangente é o eixo dos x.
CAPÍTULO 4. A FRONTEIRA REDUZIDA
78
Observação 4.8. Um vetor unitário νE (x) para o qual (4.19) e (4.20) se verifivam (com
T ± (x) como definido acima) é denotado medida teórica da normal exterior a E em
x.
Observação 4.9. Note que |Bρ | = ρn wn , (4.19) nos fornece que
|(E ∩ T − ) ∩ Bρ |
= 0.
ρ→0
|Bρ |
lim
Em resumo, em bolas suficientemente pequenas a maior parte do conjunto E concentra-se
em T + . De modo similar (4.20) nos fornece que em bolas suficientemente pequenas a maior
parte do conjunto Rn − E concentra-se em T − , dessa forma em bolas Bρ suficientemente
pequenas, o hiperplano T divede Bρ em duas partes as quais correspondem a E e Rn − E.
Consideremos agora (4.18) no caso onde ∂E é suave. Assim ν(0) será a normal à ∂E
em 0 e Sρ,ε será uma faixa de largura 2ερ e centro T (0) situado na bola Bρ (Veja figura
abaixo).
Dado que ∂E é suave,
Z
Sρ,ε
|DχE | = Hn−1 (∂E ∩ Sρ,ε ) e também Hn−1 (T (0) ∩ Bρ ) =
ρn−1 wn−1 . Dessa forma (4.18) nos fornece que ao tomarmos ρ suficientemente pequeno
poderemos assegurar que a maior parte de ∂E encontra-se na faixa Sρ,ε e quase corresponde
ao hiperplano T (0).
Finalmente (4.21) implica que a densidade Θn (E, x) em um ponto x ∈ ∂∗ E ∩ Ω é igual
a 12 , ou seja, feito o procedimento de blow-up nos pontos de ∂∗ E, em bolas suficientemente
pequenas, ∂E é quase flat, isto é, o semi-plano T + na bola fatia (divide) o conjunto
E em duas partes exatamente iguais,e , ∂E quase não se distingue de T + nessa bola
suficientemente pequena.
Capítulo
5
Regularidade da Fronteira Reduzida
Conteúdo
5.1
A classe Γn−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
81
O Teorema Estrutural . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
Conjuntos contavelmente rectificáveis e puramente não-rectificáveis . . .
86
A medida Teórica da fronteira e o Teorema de Gauss-Green . . . . . . . . . . .
97
5.4.1
Medida Teórica da Fronteira . . . . . . . . . . . . . . . . . . . . . . .
97
5.4.2
Teorema de Gauss-Green generalizado . . . . . . . . . . . . . . . . . .
98
Regularidade C1 da Fronteira Reduzida . . . . . . . . . . . . . . . . . . . . .
90
5.3.1
Representação localmente Lipschitz de ∂E . . . . . . . . . . . . . . . .
93
5.4.3
Comentários sobre Densidade-Rectificabilidade de conjuntos . . . . . . . 100
5.1.1
5.2
5.2.1
5.4
5.3
O
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Resultados preliminares
objetivo deste capítulo será estabelecer uma das mais relevantes propriedades
da fronteira reduzida ∂∗ E: a mesma pode ser escrita , salvo um conjunto de
medida |DχE |−nula , como uma reunião enumerável de subconjuntos compactos de
hipersuperfícies C1 (Teorema Estrutural para conjuntos de Caccioppoli) tal resultado é
devido à Ennio De Giorgi. Como também nesse mesmo resultado mostraremos que ∂∗ E é
denso em ∂E e que
Z
Ω
|DχE | = Hn−1 (∂∗ E ∩ Ω)
(5.1)
para todo conjunto aberto Ω. Portanto |DχE | é exatamente a medida de Hausdorff (n −
1)−dimensional restrita a ∂∗ E.
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
80
Na demonstração de (5.1) primeiro deveremos mostrar que se B ⊆ ∂∗ E então
Z
B
|DχE | = Hn−1 (B),
(5.2)
para tanto começaremos por estabelecer a razão enter esses dois termos em (5.2).
5.1 Resultados preliminares
Lema 5.1. Sejam E ⊆ Rn um conjunto de Caccioppoli e B ⊆ ∂∗ E, então existe uma
constante universal c = c(n) tal que
H
n−1
(B) ≤ c(n)
Z
|DχE |.
B
Além disso c(n) pode ser efetivamente calculada, ou seja, segundo a nossa construção
c(n) = 2.3n−1
Proof: Sejam ε, η > 0. Sendo |DχE | uma medida de Radon, existe um conjunto aberto
A tal que B ⊆ A e
Z
A
|DχE | ≤
Z
|DχE | + η.
B
Do Teorema (4.3.1), equação (4.18), para cada x ∈ B existe um número ρ = ρ(x) > 0
tal que B(x, ρ) ⊆ A, ρ < ε e
Z
1
|DχE | ≥ wn−1 ρn−1 .
2
B(x,ρ)
Pelo Lema de Recobrimento de Vitali (3.1), podemos tomar uma sequência {xi } ⊆ B
tal que, se ρi = ρ(xi ),
B⊆
[
i≥1
B(xi , 3ρi ) e B(xi , ρi ) ∩ B(xj , ρj ) = ∅ para i 6= j.
Se usarmos que B(xi , ρi ) ⊆ A e tais bolas são duas a duas disjuntas, vem que
X
i≥1
(3ρi )
n−1
Z
Z
Z
2.3n−1 X
2.3n−1
2.3n−1
≤
|DχE | ≤
|DχE | ≤
{ |DχE | + η}
wn−1 i≥1 B(xi ,ρi )
wn−1 A
wn−1 B
Finalmente se nos utilizarmos da arbitrariedade
de ε, η > 0 e da definição de medida
Z
n−1
n−1
|DχE |
de Hausdorff segue que H (B) ≤ 2.3
B
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
81
Observação 5.1. Acabamos de mostrar no Lema (5.1) acima que Hn−1 é uma medida
absolutamente contínua com respeito a medida de Radon |DχE |. Ao final do Teorema
Estrutural (5.2.1) estará demonstrado a recíproca dessa afirmativa.
5.1.1 A classe Γn−1
Definição 5.1. Γn−1 é a classe de todos os conjuntos H ⊆ Rn tal que existe um conjunto
aberto A contendo H e uma função C1 f : A → R tal que
f(x) = 0 e Df(x) 6= 0 para x ∈ H
Exemplo 5.1.
i. Seja H ⊂ Rn qualquer hiperplano e v 6= 0 um vetor normal a H e
definamos f : Rn → R como f(x) = hv, xi. Assim f ∈ C1 (Rn ) e satisfaz
f(x) = 0 e Df(x) = v 6= 0 em H.
Portanto pela definição H ∈ Γn−1
ii. Seja H agora qualquer curva sobre a esfera Sn−1 = {x ∈ Rn ; |x| = 1}. Definamos
a função f : Rn → R dada por f(x) = |x|2 − 1. Logo f ∈ C1 (Rn ) e a mesma satisfaz
f(x) = 0 e Df(x) = 2x 6= 0 em H
Portanto pela definição H ∈ Γn−1
1
H
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
82
Estes exemplos vem esclarecer que a classe de conjuntos Γn−1 deve conter conjuntos
de dimensão topológica no máximo n − 1, pois do contrário a obtenção de tais funções f
satisfazendo as hipóteses acima seriam improváveis. Por essa razão se adotara a notação
sugestiva Γn−1 .
O próximo teorema dará uma maneira eficaz de determinar quando um conjunto está
em Γn−1
Teorema 5.1.1. (De Giorgi) Seja C um conjunto compacto e suponha que existe uma
função contínua a valores vetoriais ν : C → R tal que ν 6= 0 e
lim hν(x), x − yi|x − y|−1 = 0
|x−y|→0
(5.3)
uniformenmente para x, y ∈ C. Então C ∈ Γn−1 .
Proof: Pelo Teorema da Extensão de Whitney (Veja Apêndice), existe uma função
f : Rn → R a qual satisfaz f ∈ C1 , f = 0 em C e Df = ν em C. Então como por hipótese
ν 6= 0 temos segundo a definição que C ∈ Γn−1 .
5.2 O Teorema Estrutural
Mostrar-se-á nesta sessão o Teorema Estrutural que entre muitas coisas informa que a
fronteira reduzida de um conjunto de Caccioppoli é uma superfície (n − 1)−dimensional e
a mesma é um conjunto Hn−1 − contavelmente rectificável. Moralmente veremos que um
conjunto de perímetro localmente finito tem fronteira com “medida teoricamente” C1 .
Teorema 5.2.1. (De Giorgi - Teorema Estrutural para conjuntos de
Caccioppoli) Se E é um conjunto de Caccioppoli, então
∂∗ E =
[
i≥1
(5.4)
Ci ∪ N
onde N é um conjunto |DχE |-negligenciável, ou seja,
Z
N
|DχE | = 0 e cada Ci ∈ Γn−1 é
compacto; De fato cada Ci ⊂ Si , onde Si será uma subvariedade (n − 1)−dimensional, ou
seja, uma hipersuperfície, com ν|Si normal e contínuo.
Além disso, para todo conjunto B ⊆ ∂∗ E
Z
B
|DχE | = Hn−1 (B).
Para todo conjunto aberto Ω ⊆ Rn
(5.5)
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
Per(E, Ω) =
Z
83
|DχE | = Hn−1 (∂∗ E ∩ Ω),
(5.6)
∂∗ E = ∂E
(5.7)
Ω
e, finalmente e não menos importante
Proof: Para cada x ∈ ∂∗ E sabemos do Teorema do Plano Tangente Assintótico (4.3.1)
que as expressões
lim ρ−n |Bρ (x) ∩ E ∩ T + (x)| = 0
ρ→0
(5.8)
lim ρ−n |(Bρ (x) − E) ∩ T + (x)| = 0
ρ→0
se verificam após uma translação adequada. Pelo teorema de Egoroff, podemos escolher
conjuntos |DχE |− mensuráveis {Fi }i≤1 tais que
[
∗
E
−
Fi ) = 0, |Dχ|(Fi ) < ∞
|Dχ|(∂
i≥1
ocorre convergencia em (5.8) uniforme para x ∈ Fi (i = 1, ...)
Além disso pelo Teorema de Lusin, para cada i podemos escolher conjuntos compactos
{Eji }j≥1
tais que
[ j
Ei ) = 0 e
|Dχ|(Fi −
j≥1
tem − se ν j continua.
|E
i
Por uma simples re-indexação, podemos dizer que {Eji } = {Ck }. Então
[
Ck ∪ N, |Dχ|(N) = 0,
∂∗ E =
k≥1
ocorre convergencia em (5.8) uniforme em Ck , e
tem − se ν
|Ck continua para (k = 1, ...).
(5.9)
Tal construção demonstra a primeira parte de (5.4) e somente nos resta mostrar que
Ci ∈ Γn−1 e que existem {Si }i∈N tais que Ci ⊂ Si com ν|Si normal à Si .
Defina para δ > 0
ρk (δ) ≡ sup
|hν(x), y − xi|
; 0 < |x − y| ≤ δ, x, y ∈ Ck
|y − x|
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
84
Afirmação: Para k = 1, ... tem-se ρk (δ) → 0 quando δ → 0.
Consideremos agora um tal Ck , digamos C1 . Pela nossa escolha de C1 , para todo ε
fixado com 0 < ε < 1 existe por (5.8) e (5.9) um δ tal que 0 < δ < 1 e, se ρ < 2δ e
z ∈ C1 , então
εn
|E ∩ B(z, ρ) ∩ T − (z)| < n+2 wn ρn e
2 n
wn ρ
εn wn ρn
εn
1
+
n
|E ∩ B(z, ρ) ∩ T (z)| >
= wn ρ
−
−
.
2
2n+2
2 2n+2
(5.10)
Provaremos que para todo x, y ∈ C1 tal que |x − y| < σ teremos
|hν(x), x − yi||x − y|−1 ≤ ε
Portanto como ε é arbitrário poderemos aplicar o teorema anterior e obter C1 ∈ Γn−1 .
Sendo assim, suponha primeiro que
hν(x), x − yi ≤ −ε|x − y|.
Dado que ε < 1, temos
B(ν(x), ε|y − x|) ⊆ T − (x) ∩ B(x, 2|x − y|),
(5.11)
pois se z ∈ B(y, ε|x − y|), então z = y + w, onde |w| ≤ ε|x − y|, dessa forma
hν(x), z − xi = hν(x), y − xi + hν(x), wi > ε|x − y| − |w| ≥ 0
logo B(ν(x), ε|y − x|) ⊆ T − (x) como claramente B(ν(x), ε|y − x|) ⊆ B(x, 2|x − y|) segue
tal inclusão.
Em contrapartida, dado que |x − y| < σ, (5.10) com z = x implica que
|E ∩ B(x, 2|x − y|) ∩ T + (x)| <
εn
εn wn
n
w
(2|x
−
y|)
=
|x − y|n ,
n
2n+2
4
(5.12)
e agora (5.10) com z = y implica que
|E ∩ B(y, ε|x − y|)| ≥ |E ∩ B(y, ε|x − y|) ∩ T − (y)|
εn
εn wn |x − y|n
(1 − n+1 )
≥
2
2
εn wn
n
|x − y| .
>
4
(5.13)
Ao aplicarmos Ln ⌊E, onde Ln denota a medida de Lebesgue, em ambos os lados de
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
85
(5.8) encontraremos uma estimativa (desigualdade) contraditória com (5.9) e (5.10), pois
obtemos que
|E ∩ B(x, 2|x − y|) ∩ T − (x)| <
εn wn |x − y|n
< |E ∩ B(y, ε|x − y|)|,
4
porém deveríamos ter uma desigualdade contrária dado que
E ∩ B(ν(x), ε|y − x|) ⊆ T − (x) ∩ B(x, 2|x − y|) ∩ E.
Portanto fica demonstrado que
hν(x), x − yi > −ε|x − y|
De um modo similar podemos provar também que hν(x), x − yi < ε|x − y| e assim fica
demonstrado nossa afirmação. Pelo Teorema anterior C1 ∈ Γn−1 .
Usando as mesmas técnicas empregadas no raciocínio acima podemos provar que Ci ∈
Γn−1 para i = 2, 3, ...
Agora pelo Teorema da Extensão de Whitney (Veja Apêndice) aplicado f = 0 e d = ν
em Ck existem funções de classe C1 , fk : Rn → R tais que
fk = 0
em Ck
Dfk = ν em Ck .
Seja Sk = x ∈ Rn ; fk = 0, |Dfk | > 12
(k = 1, ...)
Pelo Teorema da Função Implícita Sk é uma subvariedade (n − 1)−dimensional de
classe C1 . Claramente se tem Ck ⊂ Sk , e, isto finaliza a prova de (5.4).
Para a demonstração de (5.5) comece observando que pelo Lema (5.1)
Hn−1 (B − Ci ) ≤ 2.3n−1 |DχE |(B − Ci ) <
2.3n−1
i
e assim é suficiente provarmos o resultado proposto para B ∩ Ci ou em outras palavras
[
para B ∈ Γn−1 . Assuma portanto que B ⊂
Ck e de fato B ⊂ C1 . Pelo já mostrado
k≥1
existe uma hipersuperfície de classe C1 , S1 , com C1 ⊂ S1 . Seja γ = Hn−1 ⌊S1 . Dessa
forma, como S1 ∈ C1 segue das propriedades da Medida de Hausdorff que
lim ρ1−n γ(B(x, ρ)) = wn−1 para cada x ∈ B
ρ→0
e uma vez que x ∈ B ⊂ ∂∗ E, de (4.8) obtemos
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
86
γ(B(x, ρ))
lim Z
= 1 para cada x ∈ B.
ρ→0
|DχE |
B(x,ρ)
Dado que ambas γ e |DχE | são medidas de Radon, o ZTeorema de diferencição de
medidas de Radon assegura que |DχE | = Hn−1 ⌊∂∗ E, ou seja |DχE | = γ(B) = Hn−1 (B).
B
Z
n−1 ∗
Em particular H (∂ E ∩ Ω) =
|DχE |.
∂∗ E∩Ω
Em contrapartida, pelo Teorema de Lebesgue-Besicovitch o vetor ν(x) existe e |ν(x)| =
1, |DχE |−quase sempre em ∂E. Assim o conjunto ∂E − ∂∗ E tem medida |DχE |−nula e
usando o Lema (2.2), ou seja, que spt(DχE ) ⊆ ∂E, vem que
Per(E, Ω) =
Z
|DχE | =
Ω
Z
|DχE | =
Ω∩∂E
Z
|DχE |.
Ω∩∂∗ E
Finalmente tome A um conjunto aberto tal que ∂∗ E ∩ A = ∅; então por (5.6)
Z
|DχE | = 0
A
Segue dessa forma que χE é constante em A e assim ∂E ∩ A = ∅. Portanto ∂∗ E = ∂E
5.2.1 Conjuntos
contavelmente
rectificáveis
e
puramente
não-rectificáveis
A seguinte noção é fundamental em Teoria Geométrica da Medida
Definição 5.2. (Conjunto contavelmente rectificável) Seja Y um espaço métrico.
Um conjunto E ⊂ Y é dito ser contavelmente Hn −rectificável se existir uma sequência
de aplicações Lipschitzianas fi : Ai → Y, Ai ⊆ Rn tais que
Hn (E −
[
fi (Ai )) = 0
i≥1
É muito frequente tomarmos sem perda de generalidade Ai = Rn se Y for um espaço
de Banach: Isto é possível pois via o Teorema de extensão de funções Lipschitzianas (Veja
Apêndice) a igualdade acima é equivalente a
Hn (E −
Mais simplesmente temos
[
i≥1
fi (Rn )) = 0
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
87
Definição 5.3. (Conjuntos Rectificáveis) Seja E ⊂ Rn um conjunto Hk −mensurável.
Diremos que E é contavelmente k−rectificável se existir uma sequência de aplicações
Lipschitzianas fi : Rk → Rn tais que
E⊂
[
fi (Rk ).
i≥1
Finalmente, diremos que E é Hk −rectificável se E é contavelmente Hk −rectificável e
Hk (E) < ∞.
Exemplo 5.2. (k−gráficos Lipschitz) Seja π ⊂ Rn um k−plano e φ : π → π⊥ uma
função Lipschitz. Seja
Γ := x ∈ Rn ; φ(x) = π⊥ x
o gráfico de φ. Então, escolhendo uma base ortonormal {e1 , ..., en } de π e tomando
f(y) :=
n
X
i=1
yi ei + φ(
n
X
i=1
yi ei ) , f : Rk → Γ
obteremos que Γ é contavelmente k−rectificável. Pelo Teorema (2.2.2) (vi) concluímos
que qualquer subconjunto compacto de Γ é Hk −rectificável.
Figura 5.1: O gráfico de uma função Lipschitz e o cone x + Kπ M, com M = Lip(f)
Definição 5.4. seja π ⊂ Rn um k−plano e M ≥ 0; o cone Kπ M com eixo π e abertura
M é definido por
Kπ M; = x ∈ Rn ; |π⊥ x| ≤ M|πx|
Note que Kπ M reduz-se a π se M = 0, e Kπ M − {0} ↑ (Rn − π⊥ ) quando M ↑ ∞.
Subconjuntos de um k−gráfico Lipschitz podem ser facilmente caracterizados como àqueles
conjuntos S para os quais existem um k−plano π e uma constante M satisfazendo S ⊂
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
88
x + Kπ M para qualquer x ∈ S. De fato, se x1 , x2 ∈ S então
|π⊥ (x1 − x2 )| ≤ M|π(x1 − x2 )|;
portanto πx1 = πx2 implicando que x1 = x2 . Isto prova que para qualquer y ∈ π(S) existe
um único z ∈ π⊥ tal que y + z ∈ S; Ao tomarmos z = φ(y) obteremos que a constante de
Lipschitz de φ não excede M. A implicação recíproca é trivial.
Assim, sobre a concepção de conjuntos contavelmente rectificáveis em Rn temos
Teorema 5.2.2. (Conjuntos contavelmente rectificáveis em Rm ) Um conjunto
E ⊂ Rm é contavelmente Hn −rectificável se, e somente se existe uma sequência de
subvariedades Mk , n− dimensionais de classe C1 tais que
Hn (E −
[
Mk ) = 0
k≥1
Figura 5.2: Um conjunto rectificável 2−dimensional em R3 consistindo das superfícies geradas
por uma quantidade enumerável de bicicletas.
Paralelemente temos a seguinte
Definição 5.5. Um conjunto E ⊂ Rn Hm −mensurável é puramente m−não-rectificável
se E não contiver subconjuntos m−rectificáveis de medida Hm positiva.
Nota 5.1. Saliente que existe uma dicotomia entre conjuntos rectificáveis e puramente
não-rectificáveis.
Precisamente falendo, para qualquer subconjunto A
⊂
Rn
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
89
Figura 5.3: Um conjunto 1−dimensional puramente não-rectificável.
Hm −mensurável, ao usarmos o Princípio de Maximalidade de Hausdorff1 , segue que
A = B ∪ C, B ∩ C = ∅,
onde B é contavelmente m−rectificável e C é puramente m−não-rectificáveis em Rn .
Portanto, podemos concluir via as argumentações acima que a fronteira reduzida de um
conjunto de Caccioppoli é um conjunto contavelmente Hn −rectificável e assim o Teorema
Estrutural de De Giorgi se reescreveria em linguagem mais sofisticada da seguinte forma:
Teorema 5.2.3. (De Giorgi- Teorema Estrutural) Se E é um conjunto de
Caccioppoli, então a fronteira reduzida é um conjunto contavelmente Hn −rectificável, ou
seja,
∂∗ E =
[
i≥1
onde
Z
N
Ci ∪ N
(5.14)
|DχE | = 0 e cada Ci ∈ Γn−1 é compacto. Além disso, para todo conjunto B ⊆ ∂∗ E
para todo conjunto aberto Ω ⊆ Rn
Z
B
|DχE | = Hn−1 (B),
(5.15)
Z
(5.16)
Per(E, Ω) =
e finalmente
Ω
|DχE | = Hn−1 (∂∗ E ∩ Ω)
∂∗ E = ∂E
(5.17)
ou seja, ∂∗ E é denso ∂E
1
O Princípio de maximalidade ou maximal de Hausdorff é uma consequência do axioma da Escolha,
o mesmo fora publicado pela primeira vez em um artigo em alemão de 1909, o qual não causou grande
comoção em seu primeiro momento, senão até 1935 quando Max Zorn o publicou novamente:
Se em um conjunto parcialmente ordenado toda cadeia é limitada superiormente, o conjunto tem um
elemento maximal.
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
90
Nota 5.2. Observemos também que ∂∗ E é um conjunto de Borel e a aplicação νE : ∂∗ E →
Sn−1 é Hn−1 −mensurável. De fato, pelo Teorema de Lebesgue-Besicovith, existe νE (x) e
|νE (x)| = 1 para x ∈ Rn |DχE |−quase sempre. Agora, como |DχE | = Hn−1 ⌊∂∗ E segue que
νE : ∂∗ E → Sn−1 é Hn−1 −mensurável. Portanto temos que a Fórmula de Gauss-Green
para conjuntos de perímetro finito em Ω pode ser reescrita na seguinte forma
Z
divϕdx = −
E
Z
∂∗ E
hνE , ϕidHn−1 ∀ ϕ ∈ C10 (Ω; Rn )
Observação 5.2. Não se concretiza verdade o fato da fronteira reduzida ser um
conjunto contavelmente Hn−1 −rectificável, ou seja, a mesma ser escrita como uma união
enumerável de “pedaços” compactos de hipersuperfícies de classe C1 que por essa razão
esta venha a ser uma variedade regular de classe C1 . Pois por exemplo conjuntos que
na literatura são conhecidos como Cantor-like sets ou memos conjuntos fractais (Self
similar fractals) em geral são altamente singulares, porém os mesmos podem “repousar”,
ou seja, estarem contidos em uma união enumerável de esferas, por exemplo, as quais
são altamente regulares. Podemos citar o clássico esponja de Sierpinski o qual é um
exemplo de um conjunto de dimensão fracionária. Sua dimensão de Hausdorff é de cerca
de 2, 7, como fora exposto no capítulo II deste trabalho. Para mais informações sobre esse
conjunto e conjuntos fractais consute Morgan [7], pag. 10.
5.3 Regularidade C1 da Fronteira Reduzida
Tratar-se-á nesta seção da regularidade C1 da fronteira reduzida, ∂∗ E: serão expostos
resultados referentes a regularidade Lipschitz da fronteira topológica que servirá de
subsíduo para a demonstração da reguridade da fronteira reduzida mediante juntamente
a hipótese de continuidade do vetor normal generalizado νE .
Nota 5.3. Estaremos adotando a seguinte notação: Seja α = (α1 , ..., αn ) um vetor
n
X
n
α i Di .
unitário no R . Então denotaremos Dα =
i=1
Lema 5.2. Seja E ⊂ Ω um conjunto de Caccioppoli, e, sejam z ∈ Ω e ρ > 0 e suponha
que existe um número τ > 0 tal que, para todo t com 0 < t < τ, a bola B(z + tα, ρ) está
estritamente contida em Ω. Então
|E ∩ B(z + tα, ρ)| − |E ∩ B(z, ρ)| =
Zτ
0
dt
Z
Dα χ E .
B(z+tα,ρ)
(5.18)
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
91
Proof: Suponha que g ∈ C∞
0 (Ω) e sptg(x − tα) ⊂⊂ Ω para todo t < τ; então pelo
Teorema Fundamental do Cálculo e aplicações dos Teoremas de Fubini e Gauss-Green
vem que
Z
[g(x − tα) − g(x)]dx = −
E
Z
dx
E
Zτ
0
Zτ
Z
Dα g(x − tα)dt = − dt χE Dα g(x − tα)dx
Zτ 0 Z
= dt g(x − tα)Dα χE
0
Agora para k suficientemente grande podemos escolher funções gk ∈ C∞
0 (Ω) tais que
1
0 ≤ gk ≤ 1, gk = 1 em B(z, ρ − ) e sptgk ⊂ B(z, ρ). (Tais funções são em geral funções
k
de corte ou partições da unidade). Se escrevermos a equação acima para cada gk e então
passando o limite obteremos
|E ∩ B(z + tα, ρ)| − |E ∩ B(z, ρ)| =
Zτ
0
dt
Z
Dα χ E
B(z+tα,ρ)
e assim segue o resultado.
Observação 5.3. A interpretação do Lema acima nos diz que é possível ter uma
representação integral mais fraca da Fórmala da Coárea desde que B(z + tα, ρ) ⊂ Ω
estritamente, para todo 0 < t < τ, para algum τ > 0 inicialmete obtido.
Tal
representação classicamente é conhecida para variedades C ou mesmo para conjuntos
1
com bordo Lipschitz.
Lema 5.3. Seja E ⊂ Ω um conjunto de Caccioppoli e suponha que existem um vetor
α ∈ Rn e p > 0 tal que
Z
ν(x).α = lim Z
Dα χ E
B(x,ρ)
ρ→0
|Dα χE |
≥p>0
(5.19)
B(x,ρ)
para x ∈ Ω |DχE |−quase sempre. Suponha que z ∈ ∂E ∩ Ω e k > 0 é tal que o segmento
[z, z + kα] ⊆ Ω. Então z + kα é interior a E.
Proof: Suponha por contradição que exista um z ∈ ∂E ⊆ Ω e um k > 0 tal que [z, z +
kα] ⊆ Ω, mas [z, z + kα] não interior a E. Mostraremos primeiro que [z, z + kα] ⊆ ∂E.
Suponha existir um ponto z+tα ∈ Ω−E; então escolha ρ > 0 tal que B(z+τα, ρ) ⊆ Ω−E.
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
92
Então do Lema (5.2) anterior e da desigualdade (5.19)
0≤
Zτ
dt
0
Z
B(z+tα,ρ)
Dα χE = |E ∩ B(z + τα, ρ)| − |E ∩ B(z, ρ)| = −|E ∩ B(z, ρ)| < 0
o que produz uma contradição.
Alternativamente, suponha que exista um ponto z + τα ∈ E − ∂E e que z + kα ∈ ∂E.
Escolha ρ > 0 tal que B(z + τα, ρ) ∩ E = B(z, ρ). Do Lema (5.2) anterior
E ∩ B(z + kα, ρ)| − |E ∩ B(z + τα, ρ)| =
Zk
τ
dt
Z
B(z+τα,ρ)
Dα χE ≥ 0.
Porém, pela escolha de ρ, |E ∩ B(z + τα, ρ)| = wn ρn e por (4.1), dado que z + kα ∈ ∂E,
|E ∩ B(z + kα, ρ)| < wn ρn e assim temos uma contradição. Assim [z, z + kα] ⊆ ∂E.
O Lema ficará demonstrado ao mostrarmos que essa hipótese também gera uma
contradição.
Escolha ρ0 de sorte que B(z + tα, ρ) ⊆ Ω para cada ρ ≤ ρ0 e cada 0 < t < k. Então,
pela definição de ν e Dα χE e pelo Teorema (5.2.1),
Z
Dα χE =
B(z+tα,ρ)
Z
B(z+tα,ρ)
O Lema (4.2) asseguram que
Z
ν.α|DχE | ≥ p
Z
|DχE |, por (5.19).
B(z+tα,ρ)
|Dα χE | > C3 ρn−1 para cada 0 < t < k e cada
B(z+tα,ρ)
0 < ρ ≤ ρ0 . Agora de (5.18), (5.19) e da sentença acima temos
|E ∩ B(z + kα, ρ)| − |E ∩ B(z, ρ)| =
Zk
0
dt
Z
B(z+tα,ρ)
Dα χE ≥ kpC3 ρn−1 .
Porém o lado esquerdo é limitado superiormente por wn ρn e dessa forma obteremos
wn ≥
kpC3
→∞
ρ
, ou seja, uma contradição quando ρ → 0.
Observação 5.4. Se a hipótese do lema é verificada para k < 0 em vez de k > 0, então
o mesmo argumento mostra que z + kα está no interior de Rn − E.
O Lema acima nos diz que se existir um vetor α ∈ Rn que faz um ângulo positivo com
o normal exterior (no sentido geométrico da medida) e um ponto z ∈ ∂E ∩ Ω e k > 0 de
sorte que o segmento [z, z + kα] ⊆ Ω então é possível se deslocar na direção de α sem sair
do conjunto E, ou seja, teremos nessas circunstâncias z + kα ∈ int(E), e, analogamente
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
93
para k < 0 ter-se-á z − kα ∈ int(Ec ) = Rn − E.
5.3.1 Representação localmente Lipschitz de ∂E
Como |ν(x)| = 1 |DχE |− quase sempre, então o mesmo é limitado |DχE |− quase
sempre. Almejamos mostrar que se a direção de ν(x) não varia muito então o conjunto E
tem fronteira localmente Lipschitz. Como tais propriedades são invariantes por isometrias
lineares, poderemos aplicar uma rotação no conjunto E, se necessário o for, e simplismente
considerar o caso onde ν(x) está próximo do eixo dos xn .
Teorema 5.3.1. (De Giorgi - Representação localmente Lipschitziana de ∂E)
Sejam Ω ⊂ Rn aberto e convexo e E ⊂ Ω um conjunto de Caccioppoli. Suponha que
Z
νn (x) = lim Z
DχE
B(x,ρ)
ρ→0
|DχE |
≥q>0
B(x,ρ)
para alguma constante fixada q e x ∈ Ω |DχE |−quase sempre. Então existe um conjunto
aberto A ⊆ Rn−1 e uma função f : A → R tal que
(5.20)
∂E ∩ Ω = {(y, t); y ∈ A, t = f(y)}
Além disso,
|f(x) − f(y)| ≤ q−1
p
1 − q2 |x − y| ∀ x, y ∈ A.
(5.21)
ou seja, localmente ∂E ∩ Ω se escreve como o gráfico de uma função Lipschitziana de
n − 1 variáveis.
Proof Seja α = (α1 , ..., αn ) vetor unitário com αn > 0; então
Dα χ E = α n Dn χ E +
n−1
X
i=1
Segue portanto que se αn >
αi Di χE ≥ (αn q −
p
p
(1 − αn 2 )(1 − q2 ))|DχE |.
(1 − q2 ) poderemos concluir pelo Lema (5.3) anterior
que, para todo z ∈ ∂E ∩ Ω, pontos em Ω da forma z + tα com t > 0 pertencem ao interior
de E , e, aqueles da forma z − tα pertencem ao interior de Rn − E. Em resumo, para todo
z ∈ ∂E ∩ Ω, a interseção de Ω com o cone
C=
x ∈ Rn ; (xn − zn ) > q−1
p
(1 − q2 )
" n−1
X
i=1
(xi − zi )2
# 12
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
94
está no interior de E, e a interseção de Ω com o cone
# 12
" n−1
X
p
′
C = x ∈ Rn ; (xn − zn ) > −q−1 (1 − q2 )
(xi − zi )2
i=1
é interior a Rn − E.
Destes argumentos as equações (5.20) e (5.21) seguem
imediatamente2 .
A
E
Observação 5.5. Se Ω = Bρ podemos fazer o Teorema acima um pouco mais preciso,
no mínimo supondo-se que q está bem proximo de 1 e que ∂E ∩ B(0, (1 − q)ρ) 6= ∅. Em
resumo, podemos assuimir que ν(x) está sempre próximo do eixo xn e que ∂E está próximo
do centro da bola Bρ . Por simplicidade escreveremos q = 1 − σ e, para r > 0 denotaremos
Br = {y ∈ Rn−1 ; |y| < r}
Proposição 5.1. (De Giorgi) Seja E ⊂ Bρ um conjunto de Caccioppoli tal que
νn (x) ≥ 1 − σ
√
2 2σ
1
para x ∈ Bρ |Dχ|−quase sempre, onde ε =
< , 0 < 2σ < 1 e suponha que
1−σ
2
∂E ∩ Bσρ 6= ∅. Então, se f e A são como no Teorema (5.3.1) anterior,
A ⊇ B(1−ε)ρ
e
|f(y)| ≤ ερ, |Df(y)| ≤
2
ε
∀ y ∈ B(1−ε)ρ
2
(5.22)
(5.23)
Geometricamente uma função f é Lipschitz contínua quando é possivel em cada ponto f(x) de seu
gráfico colocarmos um cone de vértice nesse ponto de sorte que o gráfico da função não visita o epigrafo
do cone, em outras palavras, o gráfico da função se encontra totalmente no exterior do cone.
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
95
Proof: Temos
p
p
q
(1 − q2 ) = (1 − σ)−1 2σ − σ2 ≤
−1
√
ε
2σ
=
1−σ
2
Pelo Teorema de Rademacher (Veja Apêndice) f é diferenciável Ln − quase sempre,
portanto
|Df(y)| ≤ Lip(f) ≤ q−1
p
ε
(1 − q2 ) ≤ .
2
Tome agora z = (η, f(η)) ∈ ∂E ∩ Bσρ ; então temos ambos |η| < σρ e |f(η)| < σρ , e,
dessa forma se y ∈ A,
ε
ε σε ε
|f(y)| ≤ |f(η)| + |f(y) − f(η)| < σρ + (|y| + |η|) < σρ + (ρ + σρ) = ρ σ + +
2
2
2
2
√
Porém, σε = ε − 2σ, de modo que
|f(y)| ≤ ρ(ε + σ −
dado que ρ(σ −
√
√
2σ) ≤ ερ
2σ) ≤ 0 pela escolha de σ.
Dessa forma somente nos resta demonstrar (5.22). Naturamente, pela condição sobre
σ, σ+ε < 1 ⇔ σρ < (1−ε)ρ, e assim Bσρ ⊆ B(1−ε)ρ . Se η é um ponto em A determinado
como acima, então η ∈ A∩Bσρ logo A∩B(1−ε)ρ 6= ∅. Agora para finalizar a demonstração
de (5.22) basta mostrar que ∂A ∩ B(1−ε)ρ = ∅. Suponha que y ∈ ∂A; então naturalmente
por (5.20) e (5.21) necessariamente temos (y, f(y)) ∈ ∂Bρ e segue que |y| + |f(y)| ≥ ρ.
Porém pela estimativa acima
|f(y)| ≤ ρ(ε + σ −
e dessa forma
|y| ≥ ρ(1 − ε +
√
√
2σ)
2σ − σ) > (1 − ε)ρ
Observação 5.6. Segue de maneira natural da demonstração do Teorema (5.3.1), que
dado
∂E ∩ Ω = {(y, t); y ∈ A, t = f(y)}
então se E é aberto
E ∩ Ω = Ω ∩ {(y, t); y ∈ A, t > f(y)}.
Além disso, como f é uma função Lipschitz contínua, a mesma é diferenciável quase
sempre em A pelo Teorema de Rademacher (Veja Apêndice) e assim semelhantemente ao
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
96
exemplo (4.3) (i), ν(x) será normal à superfície em quase todos os pontos e
Di f(y)
1
i = 1, ..., n − 1 νn (x) = p
νi (x) = p
1 + |Df(y)|2
1 + |Df(y)|2
onde x = (y, f(y))
Teorema 5.3.2. (De Giorgi - Regularidade C1 de ∂∗ E) Seja E ⊂ Ω um conjunto
de Caccioppoli tal que ν(x) existe para todo x ∈ ∂E ∩ Ω e o mesmo é contínuo. Então
∂E ∩ Ω é uma hipersuperfície de classe C1 .
Proof: Sabemos por definição que |ν(x)| = 1 em ∂∗ E e que segundo o Teorema
Estrutural (5.2.1) ∂∗ E = ∂E. Portanto, como ν(x) é contínua, temos via argumento de
aproximação (densidade) que |ν(x)| = 1 em todos os pontos de ∂E. Do Teorema (5.3.1)
segue que, para todo z ∈ ∂E ∩ Ω, existe uma bola tal que ∂E ∩ B tem uma representação
como uma função Lipschitz contínua f. Pela observação (5.6) temos para quase todo y
Di f(y) =
νi (x)
,
νn (x)
onde x = (y, f(y)). Portanto a derivada de f coincidirá em quase todos os pontos com
uma função contínua e assim f será necessariamente uma função de classe C1 .
Exemplo 5.3. Seja u ≥ 0 definida na bola unitária B1 ⊂ Rn . Suponha ∆u = dµ para
alguma medida de Radon µ não-negativa com spt(µ) ⊂ {u = 0}. Então podemos inferir
que
i. Supondo também que µ(Br (x)) ≤ Λrn−1 para algum Λ > 0 e para x ∈ spt(µ). Então
u é Lipschitz no interior de B1 ;
ii. Se λrn−1 ≤ µ(Br (x)) ≤ Λrn−1 para λ, Λ > 0 e x ∈ spt(µ). Então o conjunto
{x ∈ B1 ; u(x) > 0} tem perímetro localmente finito no interior de B1 , ou seja, o
mesmo é um conjunto de Caccioppoli.
iii. Pode-se dar uma estimativa aproximada de Hn−1 (∂∗ {u > 0} ∩ B 1 ) do item anterior,
2
segundo os resultaodos da teoria temos
Hn−1 (∂∗ {u > 0} ∩ B 2r ) ≤ C(n, λ, Λ)rn−1 .
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
97
O exemplo acima faz referência a Teoria de Regularidade Elíptica, em particular a
regularidade da fronteira livre. Para mais informações e detalhes sobre esta teoria consulte
Caffarelli-Salsa [87], Caffarelli [88] e Teixeira [45].
5.4 A medida Teórica da fronteira e o Teorema de
Gauss-Green
5.4.1 Medida Teórica da Fronteira
Definição 5.6. Seja x ∈ Rn . Diremos que x ∈ ∂∗ E, a medida teórica da fronteira de
E, se
lim sup
r→0
|Br (x) ∩ E|
|Br (x) − E|
>
0
e
lim
sup
>0
rn
rn
r→0
Observação 5.7. Alguns autores substituem a expressão medida teórica da fronteira de
E, por fronteira essencial. Moralmente, a definição acima nos diz que ∂∗ E possui todos
os pontos x ∈ Rn que não são pontos de densidade 0 ou 1.
Lema 5.4.
i. ∂∗ E ⊂ ∂∗ E
ii. Hn−1 (∂∗ E − ∂∗ E) = 0
Proof:
i. Segue imediatamente da definição juntamente com os resultados do Lema (De
Giorgi-Densidade) (4.2) equações (4.6) e (4.7) que assegurarão que
lim inf
r→0
|Br (x) ∩ E|
|Br (x) − E|
> c(n) e lim inf
> c(n).
n
r→0
r
rn
ii. Dado que a aplicação
r→
|Br (x) ∩ E|
rn
é contínua, se x ∈ ∂∗ E, existe 0 < α < 1 , rj → 0 tal que
|Brj (x) ∩ E|
= α.
wn rnj
|Br (x) − E|
= 1 − α. Dessa forma
r→0
wn r n
Imediatamente, temos lim
min{|Brj (x) ∩ E|, |Brj (x) − E|} = min{α, 1 − α}wn rnj ,
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
98
e assim a Desigualdade Isoperimétrica relativa (2.14) fornece que
lim sup r
n−1
r→0
Uma vez que já sabemos que
fornece que
Z
Z
|DχE | > 0
Br (x)
|DχE | = 0, um argumento usual de recobrimento
Rn −∂∗ E
Hn−1 (∂∗ E − ∂∗ E) = 0
5.4.2 Teorema de Gauss-Green Generalizado
Nessa próxima etapa provaremos que se E for um conjunto de Caccioppoli, então o
Teorema de Gauss-Green possui uma forma generalizada ao passo de considerarmos a
medida teórica da fronteira de E.
Teorema 5.4.1. (Teorema de Gauss-Green Generalizado) Seja E ⊂ Rn um
conjunto de Caccioppoli.
i. Então Hn−1 (∂∗ E ∩ K) < ∞ para cada compacto K ⊂ Rn ;
ii. Além disso, para x ∈ ∂∗ E Hn−1 −quase sempre,existe uma única medida teórica da
normal exterior νE (x) tal que
Z
divϕdx =
E
Z
ϕ.νE dHn−1
(5.24)
∂∗ E
para toda ϕ ∈ C10 (Rn ; Rn ).
Proof: Pela teoria precedente,
Contudo sabemos que
e do Lema anterior
Z
Z
divφdx =
E
Z
φ.νE d(|DχE |)
Rn
|DχE | = 0, segue do Teorema Estrutural (|DχE | = Hn−1 ⌊∂∗ E)
Rn −∂∗ E
(Hn−1 (∂∗ E
− ∂∗ E) = 0) que |DχE | = Hn−1 ⌊∂∗ E. Como |DχE | é uma
medida de Radon segue portanto em particular que Hn−1 (∂∗ E∩K) < ∞ para cada compacto
K ⊂ Rn , e isso demonstra a asserção (i).
Para finalizarmos basta notar que (5.24) segue do Lema anterior, dado que ∂∗ E ⊂ ∂∗ E
e a medida teórica da fronteira de E tem medida total Hn−1 em ∂∗ E.
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
Definição 5.7. Seja E ⊂ Rn Ln −mensurável. Definimos
I≡
Ln (Br (x) − E)
=0
x ∈ R ; lim
r→0
rn
n
99
para ser a medida teórica interior de E e
O≡
Ln (Br (x) ∩ E)
=0
x ∈ R ; lim
r→0
rn
n
para ser a medida teórica exterior de E.
Nota 5.4. Note que ∂∗ E = Rn − (I ∪ O). Filosoficamente pensamos I como “interior” e
O como “exterior” de E.
Lema 5.5.
i. I, O e ∂∗ E são conjuntos Borelianos mensuráveis;
ii. Ln ((I − E) ∪ (E − I)) = 0.
Proof:
i. Existe um um conjunto Boreliano C ⊂ Rn − E tal que Ln (C ∩ T ) = Ln (T − E) para
conjunto T Ln −mensurável. Assim,
I≡
Ln (Br (x) − C)
x ∈ R ; lim
=0 ,
r→0
rn
n
e dessa forma o mesmo é mensurável à Borel. A prova para O é análoga. Portanto,
dado a mensurabilidade de I e O segue que ∂∗ E é mensurável à Borel;
ii. Segue como consequência do Teorema de densidade de Lebesgue.
Teorema 5.4.2. (Critério para perímetro finito) Seja E ⊂ Rn Ln −mensurável.
Então E é um conjunto de Caccioppoli se, e somente se,
Hn−1 (K ∩ ∂∗ E) < ∞
para cada conjunto compacto K ⊂ Rn .
Proof: Veja Evans-Gariepy [6], pag. 222.
Definição 5.8. (Pontos de densidade t) Para todo t ∈ [0, 1] e todo conjunto E ⊂ Rn
Ln −mensurável denotaremos por Et o conjunto
|E ∩ B(x, ρ)|
=t
x ∈ R ; lim
ρ→0
|B(x, ρ)|
n
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
100
de todos os pontos onde E tem densidade t.
Teorema 5.4.3. (Federer) Seja E ⊂ Rn um conjunto de perímetro finito em Ω ⊂ Rn .
Então
1
∂∗ E ∩ Ω ⊂ E 2 ⊂ ∂∗ E e Hn−1 (Ω − (E0 ∪ ∂∗ E ∪ E1 )) = 0.
Em particular, E tem densidade 0 ou
1
2
Hn−1 −quase sempre pertence a ∂∗ E.
ou 1 em x ∈ Ω Hn−1 −quase sempre e x ∈ ∂∗ E ∩ Ω
Proof: Veja Ziemer [11] pag. 158.
Nota 5.5. Segue do Teorema de Federer acima (5.4.3) que para conjuntos de perímetro
1
finito, ambos ∂∗ E e E 2 podem ser usadas no lugar de ∂∗ E na fórmula de Gauss-Green, e,
teremos:
1
Per(E; Ω) = Hn−1 (Ω ∩ ∂∗ E) = Hn−1 (Ω ∩ E 2 )
Como uma outra consequência podemos reescrever a fórmula da coarea de
Fleming-Rishel usando a fronteira essencial de conjuntos de nível:
|Du|(B) =
Z∞
−∞
Hn−1 (B ∩ ∂∗ {u > t})dt ∀ B ∈ B(Ω)
onde B(Ω) é a σ−álgebra gerada pelos conjuntos abertos de Ω.
Teorema 5.4.4. Para qualquer conjunto aberto Ω ⊂ Rn satisfazendo Hn−1 (∂Ω) < ∞
tem perímetro finito em Rn e |DχΩ | ≤ Hn−1 ⌊∂Ω. Resultado análogo se obtem se ∂Ω tem
fronteira Lipschitz.
Proof: Veja Ziemer [11] pag. 159.
5.4.3 Comentários sobre Densidade-Rectificabilidade de conjuntos
Em Teoria Geométrica da medida confronta-se resultados de rectificabilidade de
conjuntos com os de densidade dos mesmos a fim de se obter uma propriedade mediante a
existência da outra. Todos os resultados desse capítulo referentes a estrutura da fronteira
reduzida (Teorema Estrutural (5.2.1)) podem ser obtidos sob as hipóteses da densidade
do conjunto E em questão, como também a existência de plano tangente assintótico.
Exporemos alguns desses resultados de maneira ilustrativa, e, esclaremos para o leitor
que as demonstrações dos mesmos podem ser encontradas em Lang [16] pag. 12-13 e
Ziemer [11] pag. 83.
CAPÍTULO 5. REGULARIDADE DA FRONTEIRA REDUZIDA
101
Teorema 5.4.5. (Existência do espaço tangente) Suponha que E ⊂ Rn é um conjunto
contavelmente Hm −rectificável e Hm −mensurável com Hm (E) < ∞. Então para x ∈ E
Hm −quase sempre o plano tangente assintótico (ou espaço tangente) existe e Θm (E, x) =
1, ou seja, o conjunto E tem densidade m−dimensional 1 em seus pontos.
Proof: Veja Lang [16], pag. 12.
Teorema 5.4.6. Suponha que E ⊂ Rn é um conjunto Hm −rectificável com Hm (E) < ∞.
Se o plano tangente assintótico (ou espaço tangente) existe para x ∈ E Hm −quase sempre,
então E é contavelmente Hm −rectificável.
Proof: Veja Lang [16], pag. 13.
Teorema 5.4.7. (Besicovitch - Marstrand -Mattila) Seja E ∈ B(Rn ) com Hk (E) <
∞. Então, E é Hk −rectificável se e somente se Θk (E, x) = 1 para x ∈ E Hk −quase
sempre.
Proof: Veja Ziemer [11] pag. 83.
Teorema 5.4.8. (Preiss) Suponha que E ⊂ Rn é um conjunto Hm −rectificável com
Hm (E) < ∞. Se a densidade Θm (E, x) existe para x ∈ E Hm −quase sempre, então E é
contavelmente Hm −rectificável.
Proof: Veja Lang [16], pag. 13.
Capítulo
6
Algumas Desigualdades
Conteúdo
6.1
Alguns Lemas Técnicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
6.1.1
O Desvio de Minimalidade . . . . . . . . . . . . . . . . . . . . . . . . 102
N
este capítulo introduziremos algumas notações que facilitaram a técnica empregada
para o estudo da regularidade de conjuntos com perímetro minimal. Para tanto
precisaremso de alguns Lemas preliminares. Estes lemas são de natureza essencialmente
técnica e serão de fundamental importância na etapa apropriada da prova de regularidade.
6.1 Alguns Lemas Técnicos
Provou-se no Capítulo 1 a existência de conjuntos de Caccioppoli com perímetro
minimal. Assim, em geral, o procedimento que iremos empregar será termos em mãos
um conjunto minimizante , e, em seguida, examinar sua regularidade. Ao fazer isso,
muitas vezes é necessário um argumento de aproximação para os conjuntos mínimais, e,
por essa razão é conveniente introduzir uma noção métrica de quão perto é um conjunto
de ser mínimal.
6.1.1 O Desvio de Minimalidade
Definição 6.1. (De Giorgi) Se f ∈ BV(Ω) então denotaremos
ν(f, Ω) = inf
Z
Ω
|Dg|; g ∈ BV(Ω), spt(g − f) ⊂ Ω
ψ(f, Ω) =
Z
|Df| − ν(f, Ω)
Ω
CAPÍTULO 6. ALGUMAS DESIGUALDADES
103
Observação 6.1. Se Ω = Bρ , então escreveremos ν(f, ρ) e ψ(f, ρ), e, se f = χE ,
onde E ⊂ Rn é um conjunto de Caccioppoli, então escreveremos ν(E, ρ) e ψ(E, ρ)
respectivamente. Para ψ(E, A), onde A ⊂ Ω é um conjunto aberto será denotado Desvio
de Minimalidade de E em A, ou seja, a mesma é uma função de conjunto que rende
uma medida de quanto um conjunto E é de minimizar perímetro em um conjunto aberto
A⊂Ω.
Observação 6.2. Se E ⊂ Ω é um conjunto minimal, então ψ(E, Ω) = 0, pois poderemos
nos utilizar da seguinte definição
Per(E; B) = inf{Per(E; Ω); B ⊂ Ω, Ω Aberto}
Portanto,
ψ(f, Ω) =
Z
|Df| − ν(f, Ω) = 0
Ω
Definição 6.2. Diremos que um conjunto E, com perímetro finito em um conjunto aberto
Ω ⊂ Rn , é (K, λ)−minimal em Ω se
∀x ∈ Ω e ρ ∈ (0, dist(x, ∂Ω)) : ψ(E, ρ) ≤ Kρn−1+λ
A definição acima nos informa que conjuntos (K, λ)−minimais em Ω são àqueles cujo
desvio de minimalidade é controlado superiormente em qualquer bola, por um múltiplo
do raio da mesma (uma constante adequada), tal desvio é não-decrescente e o mesmo é
infinitesimal em 0.
Obviamente os conjuntos de fronteiras mínimas,
conjuntos minimais,
são
(K, λ)−minimais para todo K ≥ 0 e λ ≥ 0 dado que os mesmos como argumentamos
acima satisfazem ψ(E, Ω) = 0
Mais geralmente, se a fronteira de E tem curvatura média HE ∈ Lp (Ω) com p > n,
então E é
||H||
Lp (Ω)
,1 −
n
p
-minimal
Para mais detalhes e informações sobre fronteiras mínimas com curvatura média prescrita
consulte Massari-Miranda [26] ou Massari [57].
Lema 6.1. Sejam f ∈ BV(BR ) e 0 < ρ < r < R; então
Z
−
−
|f (rx) − f (ρx)|dH
∂B1
n−1
≤
Z
Br −Bρ
x
,
Df
|x|n
(6.1)
CAPÍTULO 6. ALGUMAS DESIGUALDADES
104
Proof: Comecemos notando primeiramente que se g ∈ C (A; R ) então
1
n
Z
|hg, Dfi|
A
é a variação total em A da medida hg, Dfi, os seja, se nos utilizarmos do Teorema de
Riesz-Markov teremos a seguinte expressão
Z
|hg, Dfi| = sup
A
Z
A
fdiv(µg)dx; µ ∈
C10 (A), |µ|
≤1
Posteriormente tomemos g(x) = x|x|−n , h qualquer função C1 e α uma função definida
por
α(x) = h(x|x|−1 ).
Então div(αg) = 0 em Rn − {0} e da sentença (3.18) teremos
Z
Z
Z
x
x
n−1
αhg, Dfi =
αf hg, idH
−
αf+ hg, idHn−1 =
|x|
|x|
Br −Bρ
∂Br Z
∂BZρ
= r1−n
αf− dHn−1 − ρ1−n
αf+ dHn−1 =
∂Br
∂Bρ
Z
−
+
h(x)[f (rx) − f (ρx)]dHn−1
=
−
∂B1
Observe que utilizamos na última igualdade a definição da função α(x). Agora, ao nos
restringirmos a função h a fim de que a mesma
Z obedeça |h(x)| ≤ 1 teremos dessa forma
|hg, Dfi| teremos
que |α(x)| ≤ 1, então mediante a definição de
A
Z
−
+
h(x)[f (rx) − f (ρx)]dH
n−1
∂B1
≤
Z
|hg, Dfi|
Br −Bρ
para qualquer função h tal que |h| ≤ 1.
Proseguindo, temos para quase todo ρ < r segundo a Observação (3.6) que
Z
|Df| = 0, e f+ = f− = f
∂Bρ
assim
Z
−
−
h(x)[f (rx) − f (ρx)]dH
∂B1
n−1
≤
Z
|hg, Dfi|
(6.2)
Br −Bρ
para quaase todo ρ < r. Logo ao tomarmos qualquer ρ < r, poderemos escolher uma
sequência {ρj } tal que ρj → ρ, dessa forma a sentença (6.2) se verifica para cada ρj
e f− (ρj x) → f− (ρx) convergindo em L1 (∂B1 ). Ao tomarmos o limite quando j → ∞
obteremos a sentença (6.2) para todo ρ < r. Agora para finalizarmos o Lema basta
tomarmos o supremo sobre todas as funções h tais que |h| ≤ 1 e enfim obteremos o
resultado desejado.
CAPÍTULO 6. ALGUMAS DESIGUALDADES
105
Observação 6.3. Similarmente podemos obter
Z
+
+
|f (rx) − f (ρx)|dH
n−1
≤
∂B1
Z
Br −Bρ
x
,
Df
|x|n
Lema 6.2. Sejam f ∈ BV(BR ), ρ < R e {ρj } uma sequência tal que ρj ≤ ρ e ρj → ρ então
lim ψ(f, ρj ) = ψ(f, ρ)
j→∞
(6.3)
lim ν(f, ρj ) = ν(f, ρ)
j→∞
Proof: Primeiramente vejamos que pela definição de ν(f, ρ) ao tomarmos ε > 0
podemos escolher uma função g ∈ BV(Bρ ) tal que spt(g − f) ⊂ Bρ e
Z
Bρ
|Dg| ≤ ν(f, ρ) + ε.
Para j suficientemente grande temos spt(g − f) ⊂ Bρj , dessa forma
Z
Bρ
|Dg| ≥
Z
Bρj
|Dg| ≥ ν(f, ρj )
Pela arbitrariedade de ε > 0 vem que
ν(f, ρ) ≥ lim sup ν(f, ρj ).
j→∞
e
Em contrapartida , para j ∈ N, podemos escolher gi ∈ BV(Bρ ) tal que sqt(gj −f) ⊂ Bρj
1
ν(f, ρj ) + ≥
j
Logo
Z
|Dgj | =
Bρj
Z
|Dgj | −
Bρ
Z
Bρ −Bρj
Z
|Dgj |.
B ρj
|Df| ≥ ν(f, ρ) −
Z
|Df|
Bρ −Bρj
e dessa forma
lim inf ν(f, ρj ) ≥ ν(f, ρ)
j→∞
Portanto, ν(f, ρ) ≥ lim sup ν(f, ρj ) ≥ lim inf ν(f, ρj ) ≥ ν(f, ρ), e assim segue que
j→∞
j→∞
lim ν(f, ρj ) = ν(f, ρ),
j→∞
mostrando que ν é uma função de conjunto contínua. Da mesma forma, dado que
CAPÍTULO 6. ALGUMAS DESIGUALDADES
ψ(f, Ω) =
e é de conhecimento que
mostrado acima que
Z
Z
106
|Df| − ν(f, Ω)
Ω
|Df| é uma função de conjunto contínua, segue juntamente do
Ω
lim ψ(f, ρj ) = ψ(f, ρ),
j→∞
ou seja, ψ também será uma função de conjunto contínua.
Nota 6.1. Segundo as nossas nomenclaturas as funções ν, ψ foram ditas de conjuntos
contínuas, pois dado ε > 0 existe um n0 ∈ N tal que se j > n0 então |ρj − ρ| < ε e mais
ainda lim ν(f, ρj ) = ν(f, ρ), analogamente para a função ψ.
j→∞
Lema 6.3. (De Giorgi) Sejam f, g ∈ BV(BR ) e ρ < R. Então
Z
|ν(f, ρ) − ν(g, ρ)| ≤
|f− − g− |dHn−1
(6.4)
∂Bρ
Proof: Uma vez que a sentença (6.4) é simétrica com respeito as funções f e g é
suficiente mostrarmos que
ν(f, ρ) − ν(g, ρ) ≤
Z
|f− − g− |dHn−1
∂Bρ
De fato, dado ε > 0, podemos escolher ϕ ∈ BV(BR ) tal que spt(ϕ − f) ⊆ Bρ e
Z
Bρ
|Dϕ| ≤ ν(f, ρ) + ε.
Seja {ρj } uma sequência tal que ρj ≤ ρ, ρj → ρ,
Z
|Df| =
∂Bρj
Z
|Dg| = 0
∂Bρj
e spt(f − ϕ) ⊆ Bρj . Assim, para cada j, defina
gj =
ϕ em Bρ
g
em BR − Bρj
Então pela Proposição (3.2), gj ∈ BV(BR ) e
CAPÍTULO 6. ALGUMAS DESIGUALDADES
ν(g, ρ) ≤
Z
Z
107
Z
Z
|Dϕ| +
|Dg| +
|f − g|dHn−1 ≤
ZBρj
Z Bρ −Bρj
Z ∂Bρj
≤
|Dϕ| +
|Dg| +
|f − g|dHn−1 ≤
Bρ
Bρ −Bρj
∂Bρj
Z
Z
≤ ν(f, ρ) + ε +
|Dg| +
|f − g|dHn−1
|Dgj | =
Bρ
Bρ −Bρj
∂Bρj
Dada a arbitrariedade de ε > 0 o Lema fica demonstrado ao permitirmos j → ∞.
Observação 6.4. Em particular se ψ(f, R) = 0, temos
ν(f, ρ) =
Z
|Df|
Bρ
e segue que para todo g ∈ BV(Bρ ),
Z
Bρ
|Df| ≤
Z
|Dg| +
Bρ
Z
|f− − g− |dHn−1
(6.5)
∂Bρ
Lema 6.4. (De Giorgi) Sejam f ∈ BV(BR ) e 0 < ρ < r < R. Então
2 Z
x
1−n
, Df ≤
|x| |Df|
n
Br −Bρ
Br −BZρ |x|
Zr
Z
1−n
1−n
−n
|Df| − ρ
|Df| + (n − 1) t ψ(f, t)dt
r
Z
BR
Bρ
ρ
Proof: Suponhamos primeiro que f ∈ C1 (BR ) e para 0 < t < R definamos
f(x)
t < |x| < R
ft (x) =
f tx
|x| < t
|x|
Dessa forma teremos
e portanto
Z
t
|Dft |dx =
n−1
Bt
Z
Z
hx, Dfi2
|Df| 1 − 2
|x| |Df|2
∂Bt
Z
12
dHn−1
|Df| − ψ(f, t) ≤
|Dft | ≤
Bt
Z
Z
hx, Dfi2
t
t
n−1
≤
|Df|dH
−
dHn−1 .
n − 1 ∂Bt
2(n − 1) ∂Bt |x|2 |Df|2
ν(f, t) =
Bt
(6.6)
CAPÍTULO 6. ALGUMAS DESIGUALDADES
108
e
1 1−n
t
2
Z
∂Bt
hx, Dfi2
dHn−1 ≤ t1−n
|x|Z2 |Df|
−n
Z
|Df|dHn−1 −
∂Bt
−(n − 1)t
|Df|dx + (n − 1)t−n ψ(f, t) =
Z ∂Bt
d
1−n
|Df|dx + (n − 1)t−n ψ(f, t).
=
t
dt
∂Bt
Agora ao integrarmos por partes com respeito a t entre ρ e r teremos
1
2
Z
Br −Bρ
hx, Dfi2
dx ≤ r1−n
|x|n+1 |Df|
Z
1−n
|Df|dx − ρ
BR
Z
|Df|dx + (n − 1)
Bρ
Zr
t−n ψ(f, t)dt
ρ
Em contrapartida, da Desigualdade de Cauchy-Schwartz vem que
Z
x
|h n , Dfi|dx
Br −Bρ |x|
2
≤
Z
|x|
1−n
|Df|dx
Br −Bρ
Z
Br −Bρ
hx, Dfi2
dx
|x|n+1 |Df|
e dessa forma a sentença (6.6) se verifica para f ∈ C1 (BR )
Agora suponha que f ∈ BV(BR ); então pelas Observações (3.5) e (3.6) podemos
aproximar f por funções fk de classe C1 tais que para quase todo t teremos
Z
Bt
|Dfk |dx →
Z
|Df| e
Bt
Z
∂Bt
|f − fk |dHn−1 → 0.
Ao escrevermos a sentença (6.6) para as funções fk e observando que, pelo Lema (6.3),
ψ(fk , t) → ψ(f, t), vê-se que a sentença (6.6) se verifica para f ∈ BV(BR ) e quase todo
ρ, r. A fim de verificar a validade da sentença (6.6) para todo ρ e r basta utilizar um
argumento de aproximação via sequências não-decrescentes {ρj } → ρ e {rj } → r, e, isso
finaliza nossa demosntração.
Nota 6.2. Com um argumento de aproximação análogo ao apresentada acima, utilizado
com sequências decrescentes a r e ρ respectivamente podemos obter a sentença (6.6) para
os conjuntos Br , Bρ ao invés de Br , Bρ .
Observação 6.5. Da sentença (6.6) segue que para todo ρ < r tem-se,
ρ
1−n
Z
Bρ
|Df| ≤ r
1−n
Z
|Df| + (n − 1)
BR
Zr
ρ
t−n ψ(f, t)dt
(6.7)
CAPÍTULO 6. ALGUMAS DESIGUALDADES
109
Em particular, se ψ(f, r) = 0, então
Z
1−n
ρ
1−n
Portanto ρ
Z
1−n
Bρ
|Df| ≤ r
Z
(6.8)
|Df|
BR
|Df| é uma função não-decrescente na variável ρ
Bρ
Lema 6.5. Sejam f ∈ BV(BR ) e 0 < ρ < r < R, então
Z
|x|
1−n
Br −Bρ
|Df| ≤
r
1 + (n − 1)log
ρ
1−n
r
Z
|Df| + (n − 1)
Br
2
Zr
s
s−n log ψ(f, s)ds (6.9)
ρ
ρ
Proof: Como usualmente estamos procedendo é suficiente provarmos a sentença (6.9)
para funções f ∈ C1 (BR ), pois o caso geral segue via um argumento de aproximação.
Vejamos que para f ∈ C1 (BR ) teremos
Z
onde η(t) =
|x|
1−n
|Df|dx =
Br −Bρ
Z
Zr
t
1−n
ρ
Z
|Df|dH
n−1
∂Bt
dt =
Zr
′
t1−n η (t)dt
ρ
|Df|dx. Ao integramos por partes e estimando a mesma obteremos
∂Bt
Zr
t
1−n
ρ
′
η (t)dt ≤ r
1−n
Z
|Df|dx + (n − 1)
Zr
t
−n
ρ
Br
Z
|Df|dx dt
∂Bt
Ao estimarmos agora esta última integral obteremos o resultado desejado. De fato,
t
−n
Z
Bt
|Df|dx ≤ t
−1
1−n
r
Z
|Df|dx + (n − 1)
Br
Zr
t
−n
s ψ(f, s)ds
o qual segue de (6.7) e portanto
Z
Z
Zr
dt r −n
r
t dt
|Df|dx ≤ r log
|Df|dx + (n − 1)
s ψ(f, s)ds =
ρ
t
Bt
B
ρ
ρ
t
t
Z
Zr
r
s
1−n
r log
|Df|dx + (n − 1) s−n log ψ(f, s)ds.
ρ Br
ρ
ρ
Zr
−n
Z
1−n
do qual a sentença (6.9) segue diretamente ao juntarmos estas duas últimas desigualdades.
CAPÍTULO 6. ALGUMAS DESIGUALDADES
110
Proposição 6.1. (De Giorgi) Sejam f ∈ BV(BR ) e 0 < ρ < r < R, então
2 Z
Z
Z
1−n
r
1−n
1−n
r
1 + (n − 1)log
Df − ρ
Df ≤ 2r
|Df|+
ρ
Br
B
Br
ρ
Zr
s
+2(n − 1)2 s−n log ψ(f, s)ds
ρ
Zs
Z
Zρ
1−n
1−n
−n
|Df| − ρ
|Df| + (n − 1) s ψ(f, s)ds
r
Br
(6.10)
ρ
Bρ
Proof: A sentença (6.10) é uma consequência imediata das sentenças (6.1), (6.6) e
(6.9), bastando para tanto notar que da Observação (3.6) temos,
Z
Z
x
Df =
f (x) dHn−1 = t1−n
|x|
Bt
∂Bt
−
Z
f− (tx)xdHn−1
∂B1
e portanto
Z
Z
1−n
1−n
r
Df − ρ
Br
Bρ
Z
Df ≤
|f− (rx) − f− (ρx)|dHn−1
∂B1
Observação 6.6. Um caso particular de nosso interesse é quando f = χE e E é um
conjunto de fronteira minimizante em BR , isto é, ψ(E, R) = 0. Nesta caso temos
Z
|χ−
E (ρx)
∂BZ1
≤2
|x|
−
n−1
χ−
E (rx)|dH
2
≤
Z
x
|h n , DχE i|
Br −Bρ Z |x|
Z
1−n
|DχE | r
|DχE | − ρ1−n
1−n
Br −Bρ
Br
2
(6.11)
|DχE |
Bρ
logo para ρ < r < R,
1−n
ρ
Z
1−n
Bρ
|DχE | ≤ r
Z
(6.12)
|DχE |
Br
Além disso,
2
Z
Z
1−n
1−n
r
DχE − ρ
DχE ≤
B
ρ
Br
Z
Z
Z
r 1−n
1−n
1−n
≤ 2 1 + (n − 1)log
|DχE | r
|DχE | − ρ
|DχE |
r
ρ
Br
Br
Bρ
(6.13)
Agora escolha 0 < s < r < R e considere os conjuntos E − Bs e E ∪ Bs . Pela definição de
ψ(E, R) temos
Per(E − Bs , Br ) =
Z
Br
|DχE−Bs | ≥
Z
Br
|DχE | e P(E ∪ Bs , Br ) =
Z
Br
|DχE∪Bs | ≥
Z
|DχE |
Br
CAPÍTULO 6. ALGUMAS DESIGUALDADES
111
Das sentenças (3.21), (3.22) da Observação (3.7) segue que
Per(E − Bs , Br ) = Per(E, Br − Bs ) + Hn−1 (∂Bs ∩ E)
e
Per(E ∪ Bs , Br ) = Per(E, Br − Bs ) + Hn−1 (∂Bs ∩ (Rn − E))
para quase todo s < r. Assim,
Per(E, Br ) ≤ Per(E, Br − Bs ) + min{Hn−1 (∂Bs ∩ E), Hn−1 (∂Bs ∩ (Rn − E))} ≤
1
≤ Per(E, Br − Bs ) + nsn−1 wn .
2
para quase todo s. Agora se escolhermos uma sequência {sj } tal que a desigualdade acima
se verifica e sj → s quando j → ∞, obteremos
Z
1
|DχE | = ν(E, r) ≤ nrn−1 wn .
2
Br
(6.14)
Se usarmos isso em (6.13) teremos
2
Z
Z
1−n
r
1−n
r
DχE − ρ
DχE ≤ nwn 1 + (n − 1)log
ρ
BZρ
ZBR
r1−n
|DχE | − ρ1−n
|DχE |
Br
(6.15)
Bρ
E se tomarmos ρ → 0 em (6.12) e relembrando (4.18) teremos
n−1
wn−1 r
≤
Z
|DχE |
(6.16)
B(x,r)
para todo x ∈ ∂∗ E e portanto, sendo ∂E = ∂∗ E, a sentença (6.16) segue para todo x em
∂E por aproximação (densidade).
Uma desigualdade similar se verifica para o volume de E ∩ B(x, r)
Proposição 6.2. Suponha que ψ(E, Ω) = 0 e tome x0 ∈ E. Então para todo r <
dist(x0 , ∂E) teremos:
|E ∩ B(x0 , r)| ≥
rn
2nc1 (n)
onde c1 (n) é a constante isoperimétrica do Corolário (2.1).
(6.17)
CAPÍTULO 6. ALGUMAS DESIGUALDADES
112
Proof: Ao tomarmos ρ < dist(x0 , ∂Ω) teremos
Z
e dessa forma
Z
Ω
Ω
|DχE | ≤
Z
|DχE | ≤
Z
|Dχ(E−Bρ ) |
Ω
χE dHn−1
∂Bρ
Em contrapartida para quase todo ρ segue que
Z
|Dχ(E∩Bρ ) | =
Ω
Z
|DχE | +
Ω
Z
χE dHn−1
∂Bρ
e portanto, ao tomarmos Eρ = E ∩ Bρ teremos
Z
Ω
|DχEρ | ≤ 2
Z
χE dHn−1 = 2
∂Bρ
d
|Eρ |.
dρ
Ao nos utilizarmos da Desigualdade Isoperimétrica (2.13) teremos
n−1
d
1
|Eρ | ≥
|Eρ | n
dρ
2c1 (n)
e integrando vem que
|Er | ≥
rn
2nc1 (n)
Observação 6.7. A proposição acima descreve (estima inferiormente) em função do raio
de B(x0 , r) o “volume” (medida) de E ∩ B(x0 , r).
Observação 6.8. Analogamente, dado que Ω − E também minimiza perímetro em Ω, se
x0 ∈ ∂E teremos por homogeneidade
a|Br | ≤ |Er | ≤ (1 − a)|Br |
(6.18)
com a−1 = 2nwn c1 (n). Como Er = E ∩ Br a Proposição (6.2) e a Observação (6.8)
moralmente expressam que sendo E conjunto minimal então seus pontos terão densidade
positiva.
Capítulo
7
Aproximação de conjuntos minimais
Conteúdo
7.1
7.2
7.3
O Lema de decaimento de De Giorgi . . . . . . . . . . . . . . . . . . . . . . . 114
7.1.1
O Desvio de Planridade (Flatness) - O excesso de área . . . . . . . . . . 114
7.1.2
A Filosofia do Lema de Decaimento de De Giorgi . . . . . . . . . . . . 120
Superfícies Mínimas e Harmônicas . . . . . . . . . . . . . . . . . . . . . . . . 121
7.2.1
Comentários sobre Espaços de Campanato . . . . . . . . . . . . . . . . 121
7.2.2
O lema de decaimento de De Giorgi para superfícies harmônicas . . . . . 122
Aproximação de conjuntos de Caccioppoli . . . . . . . . . . . . . . . . . . . . 131
Uma das mais importantes ferramentas na Teoria de Regularidade de conjuntos
minimais é o Lema devido a Ennio De Giorgi, Lema de decaimento de De Giorgi. Um Lema
dessa espécie está intrinsecamente ligado a vários resultados (Teoremas de regularidade),
onde em geral sua demonstração se dá via argumentos de contradição, como fora feito
originalmente no paper de De Giorgi [53]. Além disso, um resultado similar a esse está
entre as mais importantes ferramentas em Teoria de regularidade para correntes quase
mínimas (almost minimal currents) e varifolds, veja [100],[101], onde a demonstração é
ainda obtida via argumento de contradição, e [102] onde uma demonstração mais direta
é desenvolvida.
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
114
7.1 O Lema de decaimento de De Giorgi
Lema 7.1. (Lema de decaimento de De Giorgi) Para todo n ≥ 2 e 0 < α < 1,existe
uma constante positiva σ = σ(n, α) tal que , se E ⊂ Rn for um conjunto de Caccioppoli
e para algum ρ > 0, ψ(E, ρ) = 0,
Z
então
(CDG)
Z
Bαρ
Z
|DχE | − Bρ
Z
|DχE | − Bαρ
Bρ
DχE < σ(n, α)ρn−1 ,
Z
n
DχE < α
Bρ
Z
|DχE | − Bρ
DχE Esclarecemos que a demonstração deste somente será exposta no capítulo 8 que trata
de Regularidade de Superfícies Mínimas.
7.1.1 O Desvio de Planridade (Flatness) - O excesso de área
Vejamos uma interpretação geométrica do Lema de Decaimento de De Giorgi: Se
definirmos
n−1
Λ(E, ρ) = ρ
Z
Bρ
Z
|DχE | − Bρ
DχE e o denotarmos por Excesso de área de E em Bρ , ao nos utilizarmos das propriedades
da fronteira reduzida teremos
Λ(E, ρ) = ρ
n−1
H
n−1
Z
(Bρ ∩ ∂ E) − ∗
ν(x)dH
Bρ ∩∂∗ E
,
n−1 isso nos mostra que o valor Λ(E, ρ) é a medida de quanto o vetor normal varia e por
conseguinte o Lema de De Giorgi nos informa sobre tal variação, com efeito a Condição
de De Giorge (CDG) exige que tal variação, Λ(E, ρ), seja menor do que uma constante
suficientemente pequena σ(n, α). Tais resultados sobre vetores normais já nos foram úteis,
como por exemplo no Teorema de Regularidade de Hipersuperfícies (Teorema (5.3.1)).
Justamente como ψ(f, Ω) era um “índice de minimalidade”, asssim Λ(E, ρ) é um “índice
de planaridade” (ser suave localmente - flatness): claramente se ∂E é plano na vizinhança
de qualquer um de
Z (assim poderemos assumir que ∂ ∩ BT = {x ∈ BT ; xn = 0}),
Z seus pontos
então Λ(E, ρ) =
|DχE | −
BT
Dn χ E = 0
BT
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
115
Figura 7.1:
Reciprocamente, se 0 ∈ ∂E e Λ(E, ρ) = 0, então sob uma escolha de um sistema
referencial adequado teremos
Z
Z
Di χE = 0 quando i = 1, ...n − 1; e
BT
BT
Dn χ E ≥ 0
e segundo o que já fora estudado
0<
Z
dH
∂∗ E∩BT
n−1
=
Z
DχE =
BT
Z
D n χE =
BT
Z
νnE dHn−1
∂∗ E∩BT
Consequentemente, νnE = 1 Hn−1 − quase sempre em ∂∗ E ∩ BT o que implica
∂ ∩ BT = {x ∈ BT ; xn = 0}.
Vejamos alguns exemplos ilustrativos
Exemplo 7.1.
i. Para o cone E = {(x1 , x2 ); |x1 | < |x2 |} ⊂ R2 temos
√
ψ(E, 0, ρ) = 2(2 − 2)
Λ(E, 0, ρ) = 4.
Figura 7.2:
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
116
ii. Para o Cone de Simons C = {x21 + ... + x24 < x25 + ... + x28 } ⊂ R8 temos
ψ(C, 0, ρ) = 0
Λ(C, 0, ρ) = const. > 0
iii. Para o epigrafo1 E = {(x1 , x2 ); x2 > |x1 |1+α } ⊂ R2 , com 0 ≤ α ≤ 1 teremos
ψ(E, 0, ρ) = Λ(E, 0, ρ) ∼ c(α)ρ2α .
Figura 7.3: Epigrafo
A próxima proposição mostrará que alguns dos aspectos exibidos pelos exemplos
precedentes são na realidade de caráter geral, mais precisamente
Proposição 7.1. Para todo conjunto de Caccioppoli E ⊂ Rn tem-se
1−n
0 ≤ ψ(E, x, ρ) ≤ Λ(E, x, ρ) ≤ ρ
Z
B(x,ρ)
|DχE | ∀x ∈ Rn , ρ > 0.
(7.1)
Além disso,
∀x ∈ ∂∗ E.
Λ(E, x, ρ) = o(1)
(7.2)
Proof: Sejam B = B(x, ρ) uma bola n−dimensional arbitrária e F tal que F △ E ⊂⊂ B.
Então
χE (B) =
Z
−1
χE (y)(y − x)ρ dH
n−1
∂E
(y) =
Z
χF (y)(y − x)ρ−1 dHn−1 (y) = DχF (B)
∂B
de onde se obtem
Z
1
B
Z
Z
Z
Z
Z
|DχE | − DχE = |DχE | − DχF ≥ |DχE | − |DχF |
B
B
B
B
O epigrafo de ϕ é o conjunto
epi(ϕ) = {[x, λ] ∈ Rn × R; ϕ(x) ≤ λ}
B
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
117
e dessa forma (7.1) segue imediatamente.
Agora recordemos que x ∈ ∂∗ E se, e somente se,
Z
|DχE | > 0 ∀ ρ > 0
(7.3)
νE (x) = lim νρ (x) existe
(7.4)
|νE (x)| = 1
(7.5)
B(x,ρ)
ρ→0
Z
onde νρ = Z
DχE
B(x,ρ)
e
|DχE |
B(x,ρ)
quando é este o caso, temos além disso
Z
(7.6)
|DχE | ∼ wn−1 ρn−1
B(x,ρ)
A conclusão de (7.2) é então clara uma vez que
Z
DχE
Z
B(x,ρ)
1−n
Z
|DχE | 1 −
Λ(E, x, ρ) = ρ
B(x,ρ)
|DχE |
(7.7)
B(x,ρ)
Acabamos de averiguar que sendo x ∈ ∂∗ E ter-se-á Λ(E, x, ρ) → 0 quando ρ → 0. É
natural nos perguntarmos: Quando a recíproca é verdadeira? Mais precisamente, sob que
hipóteses adicionais faremos sobre o caráter infinitesimal do excesso a fim de que um dado
ponto de fronteira implique a existência de um vetor “normal” νE nesse referido ponto?
Comecemos nossa análise por considerar um simples contraexemplo:
p
√
Exemplo 7.2. Seja E = {(x1 , x2 , x3 ); x3 > r} ⊂ R3 , com r = x21 + x22
Figura 7.4:
Então 0 ∈ ∂E, e
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
118
Z
Z r(ρ) r
1
|DχE | = 2π
r(1 + )dr
Z 0
Z4r
ZB ρ
|D1 χE | =
|D2 χE | = 0,
|D3 χE | = πr2 (ρ).
Bρ
Bρ
Bρ
p
com r(ρ) = 12 { 1 + 4ρ2 − 1}. Uma checagem imediata fornece que
Λ(E, 0, ρ) = ρ−2
2π
Z r(ρ) r
0
1
r(1 + )dr − πr2 (ρ)
4r
e que existe
Z
νE (0) = lim+ Z
(7.8)
→ 0 quando ρ → 0,
DχE
Bρ
ρ→0
(7.9)
|DχE |
Bρ
Portanto, |νE (0)| = 0 implica que 0 ∈
/ ∂∗ E. E seguirá de (7.7), (7.8) e (7.9) que
−2
lim ρ
ρ→0
Z
|DχE | = 0
Bρ
o qual pode ser comprovado com um checagem direta.
Agora iremos supor x ∈ ∂E e que (diferentemente ao que fora solicitado no exemplo
precedente)
Z
B(x,ρ)
|DχE | ≥ c1 ρn−1 ∀ ρ ∈ (0, T )
(7.10)
com c1 > 0. De fato todo conjunto minimal satisfaz (7.10).
Segue de (7.7), (7.10) que se Λ(E, x, ρ) = o(1) e νE (x) existe, então o mesmo terá
Na ordem de assegurarmos a
comprimento unitário, e consequentemente x ∈ ∂∗ E.
existência de νE (x) nos utilizaremos da seguinte desigualdade
Z
Z
DχE
DχE v
u
G1
Λ(E, G2 )
G2
≤u
Z
Z
−
u
tZ
|DχE |
|DχE | DχE
G1
a qual se verifica ∀G1 ⊂ G2 ⊂ Rn com
De (7.10) e (7.11) deduzimos que
G2
Z
G1
|DχE | > 0
G1
(7.11)
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
Z
Z
r DχE
DχE B(x,s)
ρ n−1
− 12
B(x,ρ)
Z
≤ 2c
Z
Λ(E, x, ρ)
−
1
s
|DχE |
|DχE | B(x,s)
119
(7.12)
B(x,ρ)
para todo s, ρ tais que 0 < s < ρ < T.
Consideremos agora a situação abstrata na qual uma dada função
ν : (0, T ) → B1 ⊂ Rn satisfaz
r ρ
.g(ρ) ∀s, ρ; 0 < s < ρ < T,
|ν(s) − ν(ρ)| ≤
s
(7.13)
com g(ρ) = o(1). Note que (7.12) é um caso especial de (7.13).
Exemplo 7.3. Um cálculo simples mostra que a função
ν(ρ) =
e
e
sin log log
, cos log log
,0 < ρ < 1
ρ
ρ
satisfaz (7.13) com T = 1, n = 2 e g(ρ) =
√
2
log( ρe )
= o(1).
A condição (7.13) implica a existência daquele limite, desde que tenhamos uma
hipótese “quantitativa” razoável, observada segundo a convergência de g(ρ) a 0. Este
é o caso, por um instante quando g(ρ) ≤ cρα , α > 0.
Deduzimos das considerações precedentes que quando o conjunto E, o ponto x ∈ ∂E,
e os raios T > 0 são tais que:
Z
|DχE | ≥ c1 ρn−1 ∀ρ ∈ (0, T ), com c1 > 0, e
i.
B(x,ρ)
ii. Λ(E, x, ρ) → 0 quando ρ → 0 em algum “modo controlado”, (por exemplo, assim
como ρ2α ),
então x ∈ ∂∗ E.
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
120
7.1.2 A Filosofia do Lema de Decaimento de De Giorgi
Retornemos a discussão referente ao Lema de decaimento de De Giorgi. Para a
demonstração do Lema (Lema de decaimento de De Giorgi) começemos observando que
se E ∩ Bρ pode ser escrita como
E ∩ Bρ = {(x, t); x ∈ A, t > f(x)} ∩ Bρ
onde f ∈ C1 (A) e A ⊆ Rn−1 , então
Z
|DχE | =
Bρ
Z p
1 + |Df|2 dx
A
Portanto nosso problema se resume agora em minimizar a integral do membro direito
sobre todas as funções f ∈ C1 (A). Prosseguindo teremos que se |Df| é “pequeno”, isto é,
p
igual a 1 + 12 |Df|2 e
∂E seria quase plano em Bρ , então 1 + |Df|2 é aproximadamente
Z
assim f deve quase minimizar o funcional “energia” I(f) =
|Df|2 dx, então pelo Teorema
A
de Riemann (Veja Apêndice) segue que f deve ser quase harmônica. Contudo, segundo
o Lema (7.2) abaixo, as estimativas como aqueles do Lema de Gioegi estão disponíveis
para funções harmônicas e por isso a idéia da prova consiste no seguinte: Admita que
∂E ∈ C1 e quase plano. Então através de aproximação com funções harmônicas provamos
uma desigualdade como no Lema de De Giorgi. Mas, se ∂E ∈
/ C1 então aproximaremos
a mesma por superfícies as quais são C1 , mas não são mínimas, somente próximo de
mínimas.
Deve ser salientado o quanto é indispensável a obtenção de estimativas para funções
harmônicas que se aproximam via seqüências de superfícies tendendo a um mínimo,
seja isso em algum sentido a ser ainda devidamente esclarecido e discutido. Da mesma
forma será também importante obtermos um técnica de aproximar via hipersuperfícies C1
quaisquer superfícies mínimas dada a priori , e, em seguida, obter estimativas de como as
mesmas se comportam.
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
121
7.2 Superfícies Mínimas e Harmônicas
7.2.1 Comentários sobre Espaços de Campanato
se
Dados Ω ⊂ Rn aberto e limitado, p ≥ 1, λ ≥ 0; diremos que u ∈ Lp,λ (Ω) se e somente
−λ
u ∈ L (Ω) e sup ρ
p
x∈Ω
Z
p
Ω∩Bρ (x)
|u − ux,ρ | dy < ∞; 0 < ρ < diam(Ω)
onde ux,ρ (também denotado {u}x,ρ é a média de u em Bρ (x))
ux,ρ = {u}x,ρ
1
=
|Bρ (x)|
Z
u(y)dy.
Bρ (x)
Um fato básico sobre Espaços de Campanato é que u ∈ Lp,λ (Ω) é isomorfo ao Espaço
de Hölder C0,
λ−n
p
, desde que λ ∈ (n, n+p] e ∂Ω satisfaz um condição de regularidade (por
exemplo ∂Ω é localmente Lipschitz). (Veja por exemplo Giusti [81], Capítulo 4. Teorema
1.6).
Para conveniência do Leitor relembraremos
uma propriedade elementar das médias:
Z
se A ⊂⊂ Rn , u ∈ L2 (A), e uA = |A|−1 udx, então
A
Z
2
|u − uA | dx =
A
Z
2
A
2
(|u| − |uA | )dx ≤
Z
A
|u − λ|2 dx ∀ λ ∈ R.
(7.14)
juntamente com alguns fatos simples sobre funções harmônicas: se B = Bx,R ⊂ Rn , u ∈
C1 (B), e v é a função harmônica associada com u em B, isto é, satisfazendo
n
X
∆v =
vxi xi = 0, em B
i=1
v = u,
então,
Z
B
Z
em ∂B.
hDu, Dvidy =
2
Z
2
B
|Dv| dy ≤
|Du − Dv| dy =
B
(7.15)
Z
Z
|Du|2 dy
(7.16)
B
(|Du|2 − |Dv|2 )dy
(7.17)
B
{Du}x,R = {Dv}x,r ∀r ∈ (0, R]
(7.18)
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
−(n+2)
r
Z
|Dv − {Dv}x,r |2 dy
122
(7.19)
Bx,r
é uma função não-decrescente de r ∈ (0, R).
As asserções (7.16) a (7.18) são consequências do clássico Teorema de Gauss-Green.
Enquanto que para (7.19) observermos que qualquer solução fraca w de uma equação
diferencial parcial elíptica homogênea com coeficientes constantes
aij wxi xj = 0
satisfaz
Z
2
Bs
|w − {w}s | ≤ c1
s n+2 Z
t
|w − {w}t |2
Bt
para uma constante c1 adequada (dependendo da constante de eliticidade e da dimensão),
e para todo s, t tais que 0 < s < t (Para mais detalhes e informações consulte Giusti [81],
Capítulo 4, Lema 2.2).
O fato que c1 = 1 quando w é uma função harmônica requer uma atenção adicional:
sua prova em geral é baseada em um clássico resultado acerca de aproximação de funções
harmônicas por meio de polinômios harmônicos homogêneos (como em De Giorgi [53],
veja também Umberto-Miranda [26] 2.5.2, Proposição 1).
Vejamos agora duas desigualdades algébricas elementares
i (a2 − b2 )2
hp
p
p
2
2
2
a −b ≤2 1+b .
1+a − 1+b +
4
2
2
a2 − b2 ≤ 2
p
1 + b2 .
hp
1 + a2 −
i
p
1 + b2
(7.20)
(7.21)
ambas as sentenças acima válidas para todo a, b ∈ R (a prova consiste em técnicas de
cálculo diretamente).
7.2.2 O lema de decaimento de De Giorgi para superfícies
harmônicas
Vejamos agora um análogo do Lema de De Giorgi para funções harmônicas
Lema 7.2. (De Giorgi) Sejam Bρ ⊆ Rm e u ∈ C1 (Bρ ) harmônica em Bρ , isto é,
m
X
∂2 u(x)
= 0 para x ∈ Bρ e seja
2
∂x
i
i=1
1
q=
|Bρ |
Z
Dudx.
Bρ
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
123
Então para todo 0 < α < 1,
Z
2
Bαρ
2
(|Du| − |q| )dx ≤ α
m+2
Z
(|Du|2 − |q|2 )dx
(7.22)
Bρ
Proof: Um clássico resultado acerca de funções harmônicas assegura que a função
harmônica u pode ser escrita como uma soma (possivelmente infinita) de polinômios
harmônicos homogêneos ortogonais. Assim,
i. u =
X
Vi uniformenmente em Bρ .
i≥0
onde Vi é um polinômio harmônico de grau i,
Z
Z
hDVj , DVk idx =
hDVj , DVk idx = 0, se k 6= j, pela homogeneidade e
ii.
Bαρ
iii.
Z
Bρ
DVj dx =
Bαρ
Z
Bρ
DVj dx = 0 se j ≥ 2
Vejamos uma prova para as asserssões (ii) e (iii) acima
(ii) Para j 6= k, dado que Vj e Vk são homogêneos de graus j e k respectivamente,
segue do Teorema da Divergência que
Z
Z
dVk
dHm−1 =
hDVj , DVk i =
Vj
d|x|
Bρ
∂Bρ
Z
Vk
∂Bρ
dVj
dHm−1
d|x|
Mas, a k−homogeneidade de Vk fornece
m
X
dVk
xi Di Vk = |x|−1 kVk ,
= |x|−1
d|x|
i=1
e, a j−homogeneidade de Vj fornece
m
X
dVj
= |x|−1
xi Di Vj = |x|−1 kVj ,
d|x|
i=1
Portanto,
Z
−1
Bρ
hDVj , DVk idx = ρ k
Z
Vj Vk dH
m−1
=ρ j
∂Bρ
Para j 6= k obtemos então
Z
Bρ
hDVj , DVk idx = 0
Similarmente temos para todo α ∈ (0, 1) e j 6= k
−1
Z
Vj Vk dHm−1 .
∂Bρ
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
Z
Bαρ
124
hDVj , DVk idx = 0
(iii)As primeiras derivadas de Vj são polinômios homogêneos de grau j − 1 e
harmônicos, temos então para j ≥ 2
Z
DVj dx = wm ρm DVj (0) = 0
Bρ
e similarmente para todo α ∈ (0, 1) e j ≥ 2
Z
DVj dx = wm (αρ)m DVj (0) = 0
Bαρ
Portanto q = DV1 e assim
Z
2
2
(|Du| − |q| )dx =
Bαρ
XZ
j≥2
2
|DVj | dx =
Bαρ
X
α
m+2j−2
j≥2
Z
|DVj |2 dx.
Bρ
Mas,
XZ
j≥2
então
Z
2
|DVj | dx =
Bρ
2
Bαρ
2
Z
(|Du| − |q| )dx ≤ α
(|Du|2 − |q|2 )dx
Bρ
m+2
Z
(|Du|2 − |q|2 )dx
Bρ
O próximo passo agora será mostrar que se possuirmos uma sequência de funções de
classe C1 cujos gradientes tendem a zero e as quais não diferem muito da função harmônica
que lhe é correspondente (no sentido que as áreas das superfícies definidas são próximas)
então poderemos provar uma deseigualdade similar a (7.22).
Lema 7.3. (De Giorgi) Sejam {wj } uma sequência em C1 (Bρ ), e {βj } uma sequência de
números reais positivos. Para j ∈ N seja uj a função harmônica em Bρ tal que uj = wj
em ∂Bρ , e, para qualquer função f ∈ C(Bρ ) e qualquer r ≤ ρ, seja
1
{f}r =
|Br |
Z
fdx
Br
a média de f em Br . Suponha que
lim sup |Dwj | = 0,
j→∞ Bρ
(7.23)
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
Z q
q
2
2
1 + |Dwj | − 1 + |{Dwj }ρ | dx ≤ βj ,
125
(7.24)
Bρ
q
q
2
2
1 + |Dwj | − 1 + |Duj | dx = 0.
(7.25)
q
q
2
2
1 + |Dwj | − 1 + |{Dwj }αρ | dx ≤ αm+2 .
(7.26)
Z
lim sup β−1
j
j→∞
Bρ
Então para todo 0 < α < 1,
Z
lim sup β−1
j
j→‘∞
Bαρ
Proof: Da expansão em Série de Taylor de
p
1 + A2 −
p
√
1 + x sobre B2 temos
(A2 − B2 )
(A2 − B2 )2
1 + B2 − √
=−
3
2 1 + B2
8(1 + ξ2 ) 2
para algum ξ ∈ (A, B). Logo,
p
p
(A2 − B2 )
1 + B2 ≤ √
2 1 + B2
(7.27)
(A2 − B2 )
(A2 − B2 )2
1 + B2 − √
≥− √
2 1 + B2
2 1 + B2
(7.28)
1 + A2 −
e, se B2 < 1 tem-se
p
1 + A2 −
p
Da equação (7.27) obtemos
Z
Bαρ
q
1 + |Dwj
|2
Z
q
1
2
− 1 + |{Dwj }αρ | dx ≤ q
[|Dwj |2 −|(Dwj )αρ |2 ]dx
2
2 1 + |{Dwj }αρ | Bαρ
(7.29)
Utilizando a definição dos {Dwj }αρ segue que
Z
2
2
[|Dwj | − |{Dwj }αρ | ]dx =
Bαρ
e assim
Z
lim sup β−1
j
j→∞
Bαρ
Z
2
Bαρ
q
1
≤ lim sup β−1
j
2 j→∞
Z
|Dwj − {Dwj }αρ | dx ≤
Z
|Dwj − {Dwj }ρ |2 dx
Bαρ
q
1 + |Dwj |2 − 1 + |{Dwj }|2 dx ≤
(7.30)
|Dwj − |{Dwj }ρ |2 dx.
Bαρ
Agora estimaremos o lado direito da equação (7.30). Vejamos que se A, B, C ∈ Rm ,
então ao combinarmos a desigualdade triangular com a desigualdade de Cauchy com ε
seguirá que
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
2
|A − B| ≤
1
1+
ε
126
|A − C|2 + (1 + ε)|B − C|2 ∀ ε > 0.
Portanto, para ε > 0 segue ao utilizarmos a desigualda acima que,
Z
2
Bαρ
|Dwj − |{Dwj }ρ | dx ≤
1
1+
ε
Z
2
|Dwj − Duj | dx + (1 + ε)
Bαρ
Z
|Duj − {Dwj }ρ |2 dx
Bαρ
(7.31)
Pela propriedade das funções harmônicas
{Duj }αρ = {Duj }ρ = {Dwj }ρ
e portanto segue do Lema (7.2) que,
Z
2
Bαρ
|Duj − {Dwj }ρ | dx ≤ α
m+2
Z
|Duj − {Dwj }ρ |2 dx
Bρ
Além disso,
Z
Z
1
|Duj − {Dwj }ρ | dx ≤ (1 + ε)
|Dwj − {Dwj }ρ | dx + 1 +
ε
Bρ
Bρ
2
2
Z
|Dwj − Duj |2 dx
Bρ
e assim segue que (7.31) que
Z
2
Bαρ
|Dwj − {Dwj }ρ | dx ≤ α
m+2
(1 + ε)
2
Z
2
|Dwj − {Dwj }ρ | dx + Q
Bρ
Z
|Dwj − Duj |2 dx
Bρ
(7.32)
onde Q = Q(ε, α, m)
Utilizaremos agora as sentenças (7.23), (7.24) e (7.25) para estimar o segundo termo
no lado direito da sentença (7.32). Assim, de (7.28) segue que
q
q
2
2
1 + |Dwj | − 1 + |{Dwj }ρ | dx ≥
Bρ
Z
Z
1
2
2
2
2 2
(|Dwj | − |{Dwj }ρ | )dx −
(|Dwj | − |{Dwj }ρ | ) dx
≥ p
2 1 + |{Dwj }ρ |2
Bρ
Bρ
Z
Mas,
(|Dwj |2 − |{Dwj }ρ |2 )2 ≤ |Dwj − {Dwj }ρ |2 (sup |Dwj | + |{Dwj }ρ |)2 = mj |Dwj − {Dwj }ρ |2
Bρ
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
127
e dessa forma
Z
q
Z
q
1 − mj
2
2
1 + |Dwj | − 1 + |{Dwj }ρ | dx ≥ p
(|Dwj |2 − |{Dwj }ρ |2 )dx
2
2
1
+
|{Dw
}
|
Bρ
Bρ
j ρ
(7.33)
Das sentenças (7.33), (7.23) e (7.24) deduzimos que
lim sup β
−1
j→∞
Z
Bρ
(7.34)
(|Dwj |2 − |{Dwj }ρ |2 )dx ≤ 2
Em contrapartida de sentença (7.27) segue que
Z
Z
q
2
(|{Dwj }ρ | − |Duj | |)dx ≤ 2 1 + |{Dwj }ρ |
2
Bρ
2
Bρ
q
1 + |{Dwj }ρ
|2
q
2
− 1 + |Duj | dx
Ao compararmos esta com (7.33) e observando que u é harmônica segue que
Z
2
|Dwj − Duj | |dx =
Bρ
Z
(|Dwj |2 − |Duj |2 |)dx,
Bρ
Logo concluímos que
Z q
q
q
|Dwj − Duj | dx ≤ 2 1 + |{Dwj }ρ |2
1 + |Dwj |2 − 1 + |Duj |2 dx+
Bρ
B
ρ
Z q
q
mj
2
2
+
( 1 + |Dwj | − 1 + |{Dwj }ρ | )dx
1 − mj Bρ
Z
2
Portanto,
lim
Z
j→∞ B
ρ
|Dwj − Duj |2 dx = 0
Tal fato juntamente com as sentenças (7.34), (7.32) e (7.30) nos fornece que
lim sup β
j→∞
−1
Z
Bαρ
q
q
2
2
1 + |Dwj | − 1 + |{Dwj }αρ | dx ≤ (1 + ε)2 αm+2
Finalmente a conclusão do Lema se dá ao tomarmos ε → 0 na sentença acima.
O próximo lema é similar ao anterior, todavia agora iremos considerar conjuntos
determinados por funções suaves ao invés de considerar funções satisfazendo (7.25) e
substituir (7.25) pela condição a qual diz que os conjuntos tendem para um mínimo.
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
128
Se Bρ ⊂ Rm e w ∈ C(Bρ ), definimos
W = {(x, t); x ∈ Bρ , t < w(x)},
Q = {(x, t); x ∈ Bρ , min w − 1 < t < max w + 1}.
Lema 7.4. (De Giorgi) Sejam {wj } uma sequência em C1 (Bρ ) e {βj } uma sequência de
números reais positivos tais que
Z
Bρ
q
q
2
2
1 + |Dwj | − 1 + |(Dwj )ρ | dx ≤ βρ ,
(7.35)
lim sup |Dwj | = 0,
(7.36)
lim β−1
j ψ(Wj , Qj ) = 0.
(7.37)
q
1 + |Dwj |2 − 1 + |{Duj }αρ |2 dx ≤ αm+2 .
(7.38)
j→∞ Bρ
j→∞
Então para todo 0 < α < 1,
Z
lim sup β−1
j
j→∞
Bαρ
q
Proof: Denote por uj a função harmônica em Bρ a qual é igual a wj em ∂Bρ . Então
Z
Bρ
q
q
2
2
1 + |Dwj | − 1 + |Duj | dx ≤ ψ(Wj , Qj )
e a conclusão segue do Lema anterior (7.3).
Veremos agora outro resultado similar aos anteriores, todavia o mesmo agora se refirirá
a conjuntos de Caccioppoli, imporemos as condições apropriadas sobre tal resultados e
nos utilizaremos do lema precedente com m = n − 1.
Lema 7.5. (De Giorgi) Sejam {Lj } uma sequência de conjuntos de Caccioppoli em Rn ,
{βj } uma sequência de números reais positivos e ρ > 0 tais que
Z
∂Lj ∩ Bρ
Bρ
Z
|DχLj | − Bρ
DχLj ≤ βj ,
uma hipersuperfcie de classe C1 e
(7.39)
lim inf νjn = 1
j→∞ ∂Lj ∩Bρ
(7.40)
onde νj (x) é a normal à Lj no ponto x,
lim β−1
j ψ(Lj , ρ) = 0.
j→∞
(7.41)
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
129
Então para todo 0 < α < 1,
lim sup β−1
j
j→∞
Z
Bαρ
Z
|DχLj | − Bαρ
DχLj ≤ αn+1 .
(7.42)
Proof: Suponha que existam uma sequência {Lj } e α ∈ R para os quais as sentenças
(7.39), (7.40) e (7.41) se verificam, porém
lim
j→∞
β−1
j
Z
Podemos supor que νjn (x) ≥
Bαρ
1
2
Z
|DχLj | − Bαρ
DχLj > αn+1 .
(7.43)
∀x ∈ ∂Lj ∩ B e ∀j. Pelos Teoremas (5.3.1) e (5.3.2)
concluímos que existem conjuntos abertos Aj ⊆ Rn−1 e funções de classe C1 wj : Aj → R
tais que
∂Lj ∩ Bρ = {(y, t) ∈ Rn ; y ∈ Aj , t = wj (y)}
e pelas sentenças (5.21) e (7.40) temos que
lim sup |Dwj | = 0.
j→∞ Aj
(7.44)
Além disso, dado que sup |wj | ≤ ρ, podemos assumir (via argumento de subsequência,
Aj
se necessário) que
lim inf wj = c.
j→∞ Aj
(7.45)
Então teremos c2 < ρ2 , ou seja, não poderemos ter c2 = ρ2 . De fato, de outro modo
ocorrendo (7.44) teríamos para j suficientemente grande que ∂Lj ∩ Bαρ = ∅ o que contradiz
a sentença (7.43). Das sentenças (7.44) e (7.45) concluímos que para todo ε > 0 existe
′
′
um jε tal que |wj − c| < ε para j > jε , segue assim da definição dos wj que existe um jε
tal que se σ2 = ρ2 − c2 então
Bσ−ε ⊆ Aj ⊆ Bσ+ε para j > jε
(7.46)
Do exemplo (2.6) temos
Z
DχLj =
(Bσ−ε ×R)∩Bρ
Z
νj (x)dHn−1 para j > jε .
∂Lj ∩Bρ
Dessa forma mediante uma mudança de variável e nos utilizando da Observação (5.6)
para j > jε que,
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
Z
Di χ L j =
(Bσ−ε ×R)∩Bρ
Z
Z
Z
Dn χLj = |Bσ−ε |,
(Bσ−ε ×R)∩Bρ
(Bσ−ε ×R)∩Bρ
Z
Bσ−ε
Portanto,
e
Z
Bσ−ε
i = 1, 2, ..., n − 1,
Di wj dy
Bσ−ε
|DχLj | =
q
1
1 + |{Dwj }σ−ε |2 =
|Bσ−ε |
q
1 + |Dwj |2 dy.
Z
|DχLj |
(Bσ−ε ×R)∩Bρ
q
Z
q
1 + |Dwj |2 dy − 1 + |{Dwj }σ−ε |2 dy ≤
Segue pois do Lema (7.4) que para todo 0 < γ < 1,
−1
lim supβ
j→∞
Z
Bγ(σ−ε)
q
130
Bρ
Z
|DχLj | − Bρ
DχLj ≤ βj .
q
2
1 + |Dwj |2 − 1 + |{Dwj }γ(σ−ε) | dy ≤ γn+1
(7.47)
Tomemos agora Cj = {y ∈ Aj ; (y, wj (y)) ∈ Bαρ }, então raciocinando semelhantemente
′
′
a (7.46) podemos mostrar que existe um jε tal que, para j > jε , temos Cj ⊆ Bγ(σ+ε) e
dessa forma
Z
Bαρ
Z
|DχLj | − Bαρ
Z
DχLj ≤
Bα(σ+ε)
q
Em contrapartida se tomarmos γ = α
sentença (7.47) obteremos
−1
lim supβ
j→∞
Z
Bαρ
Z
|DχLj | − 1 + |Dwj
σ+ε
σ−ε
Bαρ
|2
q
2
− 1 + |{Dwj }α(σ+ε) | dy
(para ε suficientemente pequeno) na
n+1
σ+ε
DχLj ≤ α
σ−ε
para todo ε suficientemente pequeno. Se fizermos ε → 0 teremos uma contradição com a
sentença (7.43).
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
131
7.3 Aproximação de conjuntos de Caccioppoli
Nessa seção será trabalhado um Teorema similar ao Lema (7.5), contudo agora o
contexto será conjuntos de Caccioppoli arbitrários ao invés de somente conjuntos com
fronteira de classe C1 .
Na ordem dos fatos provaremos o teorema via aproximação
por conjuntos suaves e dessa forma precisamos detalhar as estimativas da aproximação.
Primeiramente faremos uma aproximação C1 segundo a técnica de regularização, a qual
fora introduzida no capítulo 2 deste trabalho. Não obstante, tais funções não produzem
os resultados requeridos, assim ao invés de produzirmos convoluções com regularizantes
simétricos positivos como fora feito no capítulo 2, faremos a convolução com as funções
n + 1 −n
ηε (x) =
ε max
wn
|x|
1−
ε
,0
n + 1 −n
|x|
=
∨ 0.
ε
1−
wn
ε
Tem-se que a função η1 satisfaz as condições para um regularizante simétrico positivo
exceto que a mesma é meramente uma função Lipschitz contínua em vez de C∞ e spt(η1 ) =
B1 em vez de spt(η1 ) ⊆ B1 . Não obstante qualquer uma das propriedades obtidas dos
regularizantes simétricos positivos são verificadas.
Nesta seção, dada uma função f ∈ L1loc (Rn ) e ε > 0 denotemos
Z
fε (x) = ηε (x − y)f(y)dy
Lema 7.6. (De Giorgi) Sejam E um conjunto Boreliano, ε > 0 e χε = (χE )ε . Então χε
é uma função de classe C1 e para todo x ∈ Rn e ρ < n1 ,
n2 ρ2 < χε (x) < 1 − n2 ρ2
implica
dist(x, ∂E) ≤ (1 − ρ)ε
Proof: Uma vez que ηε é uma função Lipschitz contínua e spt(ηε ) ⊆ Bε , segue
imediatamente que χε é uma função Lipschitz contínua e dessa forma medianete o
Teorema de Rademacher
Z (Veja Apêndice) a mesma é diferenciável em quase todo ponto.
Além disso, Dχε (x) = Dηε χE (x − z)dz e dessa forma
|Dχε (x1 ) − Dχε (x2 )| ≤ Cε
Z
|χE (x1 − z) − χE (x2 − z)|dz
|z|<ε
Quando x1 → x2 a integral do lado direito da sentença acima tende a zero, seguindo
dessa forma que χε ∈ C1
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
132
Suponhamos que x ∈ Rn e tomemos d = dist(x, E). Assim,
χε (x) =
Z
ZE
ηε (x − y)dy =
Zε t
1−
=
ηε (x − y)dy ≤ n(n + 1)ε
ε
d
E−Bd
n d
1
d
−
.
= 1 − n(n + 1)
ε
n ε(n + 1)
Se
−n
tn−1 dt =
d
≥ 1 − ρ, então
ε
χε (x) ≤ 1 − n(n + 1) (1 − ρ)
dodo que −n(n + 1) ≤ −1 e
1
n(n+1)
n
1 + nρ
n(n + 1)
≤ 1 − (1 − ρ)n (1 + nρ),
≤ 1, e pela Desigualdade de Bernoulli vem que
χε (x) ≤ 1 − (1 − ρ)n (1 + nρ) ≤ 1 − (1 − nρ)(1 + nρ) = nρ2
Assim, se χε (x) > nρ2 teremos dist(x, E) < ε(1 − ρ).
Similarmente, se χε (x) > 1 − nρ2 teremos dist(x, Rn − E) < ε(1 − ρ).
Em qualquer dos casos acima segue o resultado desejado.
Lema 7.7. Sejam f ∈ BV(B1 ), τ < 1, ε > 0 e τ + ε ≤ 1. Então,
Z
Z
Bτ
|fε − f|dx ≤ ε
|Dfε | −
Bτ
Z
Bτ
Z
|Df| ≤
(7.48)
|Df|,
Bτ+ε
Z
(7.49)
|Df|
Bτ+ε −Bτ
Proof: Como na demonstração da Proposição (2.2) podemos mostrar que
Z
Bτ
|Dfε | ≤
Z
|Df|
Bτ+ε
e assim seguirá a sentença (7.49).
Vamos a demonstração da sentenaça (7.48): Dado que f ∈ C1 (B1 ) então
|fε (x) − f(x)| ≤
e dessa forma
Z
Bε
ηε (z)|f(x − z) − f(x)|dz ≤
Z
|z|ηε (z)dz
Bε
Z1
0
|Df(x − tz)|
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
Z
133
Z
Z1
|fε − f|dx ≤
ηε (z)dt |Df(x − tz)|dt dx
ε
Bτ
BZτ
Bε
Z 1 Z0
Z
≤ε
ηε (z)dz dt
|Df(y)|dy = ε
Z
0
Bε
Bτ+ε
|Df|dx.
Bτ+ε
A conclusão de (7.49) segue para qualquer f ∈ BV(B1 ) via o Teorema de Aproximação
de funções BV por funções suaves (2.5.1).
Nota 7.1. Mostrar-se-á no próximo teorema que se tivermos uma conjunto minimal cuja
função característica tem derivadas distribucionais as quais estão muito próximas de uma
direção, no sentido que
Z
B
(|DχE | − Dn χE ) ≤ γ,
então as funções regularizantes dos dois Lemas precedentes tem derivadas as quais obdecem
as mesmas propriedades acima referidas, ou seja, estão muito próximas de alguma direção.
Teorema 7.3.1. (De Giorgi) Seja E um conjunto de Caccioppoli satisfazendo
(7.50)
ψ(E, 1) = 0,
Z
B1
(7.51)
(|DχE | − Dn χE ) ≤ γ.
Então para cada inteiro p existe uma constante λ = λ(γ), convergindo a 0 quando γ
converge a 0, tal que, se ε = γp e
Z
χ(x) = ηε (x − y)χE (y)dy = (χE )ε ,
então
inf
1
Dn χ(x)
; |x| < 1 − 2γ 2(n−1) e n2 ρ2 < χ(x) < 1 − n2 ρ2
|Dχ(x)|
> 1 − λ(γ).
(7.52)
1
Proof: Seja σ = γ 2(n−1) e suponha que |x| < 1 − 2σ. Mediante o fato que o conjunto
o qual estamos tomando o ínfimo é não-vazio, se n2 γ2 > 12 , poderemos então assumir que
γ < 1 e consequentemente ε = γp < σ. Assim,
Z
Dn χ(x) = ηε (x − y)Dn χE (y)
Z
|Dχ(x)| ≤ ηε (x − y)|DχE (y)|
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
134
Nosso objetivo agora será estimar |Dχ(x)| − Dn χ(x) em termos de |Dχ(x)| a fim de
obter λ(γ), mas, para tanto estimaremos
Z
em termos de
Z
ηε (x − y)(|DχE (y)| − Dn χE (y))
B(x,ε)
ηε (x − y)|DχE (y)|.
B(x,ε)
Para maior facilidade da notação usaremos Br = B(x, r), sem de fato esquecermos
a dependência desta de x. A demonstração se resume essencialmente em utilizarmos
as técnicas empregadas nos dois Lemas precedentes e também de algumas desigualdades
(estas provenientes do capítulo 6 deste trabalho).
Seja δ ∈ (0, 12 ) umaZ constante a se determinar posteriormente. O procedimento agora
ηε (x − y)(|DχE (y)| − Dn χE (y)) em duas partes: na primeira
consistirá em estimar
B(x,ε)
a estimativa será feita na bola Bε(1−2σ) e então posteriormente no restante de Bε
Por uma pequena alteração do Lema de Recobrimento de Vitali (3.1)(devemos observar
que nesse caso ρ permanece constante), podemos mostrar que existe um número finito de
pontos ξ1 , ..., ξN ∈ ∂∗ E ∩ Bε(1−2σ) tal que
B(ξi , δε) ∩ B(ξj , δε) = ∅ i 6= j
∂E ∩ Bε(1−2σ) ⊆
Então,
Z
Bε(1−2δ)
Z
Bε
ηε (x − y)|DχE (y)| ≥
i=1
Z
B(ξi , 2δε)
i=1
ηε (x − y)|DχE (y)| e
B(ξi ,δε)
ηε (x − y)(|DχE (y)| − Dn χE (y)) ≤
Assim para cada i estimaremos
Z
N Z
X
N
[
N Z
X
i=1
ηε (x − y)(|DχE (y)| − Dn χE (y))
B(ξi ,2δε)
ηε (x − y)(|DχE (y)| − Dn χE (y)) em termos de
B(ξi ,2δε)
ηε (x − y)|DχE (y)|
B(ξi ,δε)
Veja que na bola B(ξi , δε) a função ηε (x − y) tem
|x − ξi |
n + 1 −n
>0
ε . 1−δ−
wn
ε
como cota inferior, e, dessa forma temos
Z
Z
n + 1 −n
|x − ξi |
ηε (x − y)|DχE (y)| ≥
ε
1−δ−
|DχE (y)|
wn
ε
B(ξi ,δε)
B(ξi ,δε)
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
135
Além disso, temos que, por (6.16)
Z
B(ξi ,δε)
|DχE (y)| ≥ wn−1 (δε)n−1 .
Portanto,
Z
n + 1 n−1 −1
|x − ξi |
1−δ−
ηε (x − y)|DχE (y)| ≥ wn−1
δ ε
wn
ε
B(ξi ,δε)
(7.53)
Em contrapartida, ao fazermos a estimativa superior de ηε (x − y) consiguiremos
Z
ηε (x − y)(|DχE (y)| − Dn χE (y)) ≤
Z
|x − ξi |
n + 1 −n
1 + 2δ −
ε
(|DχE (y)| − Dn χE (y))
≤
wn
ε
B(ξi ,2δε)
B(ξi ,2δε)
Se utilizarmos (6.8) e o fato que σ > 2δε obteremos
Z
(|DχE (y)| − Dn χE (y)) ≤ (2δε)
Z
1−n
Dn χE (y) − (2δε)
B(ξi ,2δε)Z
+σ1−n
B(ξi ,σ)
n−1
σ
1−n
Z
(|DχE (y)| − Dn χE (y))+
B(ξ
i ,σ)
Dn χE (y)
B(ξi ,2δε)
das sentenças (6.15), (7.51) e da hipótese de |x| < 1 − 2σ temos
Z
(|DχE (y)| − Dn χE (y)) ≤
r
Z
√
σ
n−1 √
1−n
σ
≤ (2δε) { γ+ nwn 1 + (n − 1)log
|DχE (y)|−
2δε
B(ξi ,σ)
12
Z
1−n
|DχE (y)|
}
−(2δε)
B(ξi ,2δε)
B(ξi ,2δε)
Note agora que,
σ
1−n
Z
|DχE (y)| − (2δε)
B(ξ
Z i ,σ)
= σ1−n
B(ξi ,σ)
1−n
Z
|DχE (y)| =
Z
Z
1−n
1−n
(|DχE (y)| − Dn χE (y)) + σ
Dn χE (y) − (2δε)
B(ξi ,2δε)
B(ξi ,σ)
Pela clássica Fórmula de Gauss-Green temos
1−n
σ
Z
B(ξi ,σ)
Dn χE (y) ≤ wn−1 ,
|DχE (y)|
B(ξi ,2δε)
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
e ξi ∈ ∂∗ E implica que
(2δε)
1−n
Z
B(ξi ,2δε)
136
|DχE (y)| ≥ wn−1 ,
de onde se segue ao aplicarmos a desigualdade (7.51) que
Z
(ηε (x − y)|DχE (y) − Dn χE (y)) ≤
n + 1 n−1 n−1 −1
|x − ξi |
2 δ ε
≤
1 + 2δ −
ε
wn r
√
σ √
4
γ + nwn 1 + (n − 1)log
γ
2δε
B(ξi ,2δε)
Ao comparmos esta com a sentença (7.53) e obsevarmos que
1 + 2δ −
1−δ−
|x−ξi |
ε
|x−ξi |
ε
=1+
3δ
1−δ−
|x−ξi |
ε
≤1+
3δ
=4
δ
teremos
Z
ηε (x − y)(|DχE (y) − Dn χE (y)) ≤
r
Z
√
√
σ 2
4
4
γ
γ + nwn 1 + (n − 1)log
ηε (x − y)|DχE (y)|
≤
wn−1
2δε
B(ξi ,δε)
B(ξi ,2δε)
n+1
Dessa forma se somarmos de i = 1 a N obteremos
Z
ηε (x − y)(|DχE (y)| − Dn χE (y)) ≤
r
Z
√
√
2
σ
4
≤
γ 4 γ + nwn 1 + (n − 1)log
ηε (x − y)|DχE (y)|
wn−1
2δε
Bε
Bε(1−2δ)
n+1
(7.54)
Agora faremos uma estimativa semelhante para a integral sobre o conjunto
n + 1 −n
ε 2δ como cota superior e
C = Bε − Bε(1−2δ) . Nesse conjunto, ηε (x − y) tem
wn
consequentemente tem-se
Z
C
ηε (x − y)(|DχE (y)| − Dn χE (y)) ≤ 2
Z
ηε (x − y)|DχE (y)| ≤
Z
n + 1 −n
ε δ
|DχE (y)| ≤
≤4
wn
Bε
C
(7.55)
≤ 2n(n + 1)ε−1 δ por (6.14)
Até o presente momente somente havíamos usado a hipótese de |x| < 1 − 2δ, contudo
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
137
agora introduziremos a hipótese de n2 γ2 < χ(x) < 1 − n2 γ2
Podemos concluir do Lemma (7.6) a existência de ξ ∈ ∂∗ E com |ξ − x| ≤ (1 − γ)ε.
Então se aplicarmos uma desigualdade triangular veremos que
B(ξ,
γε
γε
) ⊆ B(x, (1 −
)ε)
2
2
, e, consequentemente ηε (x − y) tem
Segue que
Z
Bε
ηε (x − y)|DχE (y)| ≥
Z
n + 1 −n γ
como cota inferior no conjunto B(ξ, γε
ε
).
2
wn
2
B(ξ, γε
)
2
ηε (x − y)|DχE (y)| ≥
n + 1 wn−1 n−1 −1
γ ε
wn 2 n
e comparando esta com (7.55),
Z
Bε
ηε (x − y)(|DχE (y)| − Dn χE (y)) ≤ 2
n+1
nwn 1−n
δγ
wn−1
Z
ηε (x − y)|DχE (y)|
Bε
Ao adicionarmos esse a sentença (7.54) teremos:
com
Z
Bε
ηε (x − y)(|DχE (y)| − Dn χE (y)) ≤ λ(γ)
λ(γ) = 2
n+1
Z
ηε (x − y)|DχE (y)|
(7.56)
Bε
r
√
σ
nwn 1−n 2n+1 √
4
δγ
+
γ 4 γ + nwn 1 + (n − 1)log
wn−1
wn−1
2δε
A escolha σ = γn confere as propriedades solicitadas para λ(γ)
Observação 7.1. A última integral em (7.56) é naturalmente positiva para |x| < 1 − 2σ
e n2 γ2 ≤ χ(x) ≤ 1 − n2 γ2 , e, portanto para tal x tem-se:
Dn χ(x) =
Z
Bε
ηε (x − y)Dn χE (y) ≥ (1 − λ(γ))
Z
ηε (x − y)|DχE (y)| > 0
Bε
Em particular, o conjunto de nível de χ :
S(ϑ) = {x ∈ B; |x| < 1 − 2σ, χ(x) > ϑ}
tem fronteira de classe C1 para n2 γ2 < ϑ < 1 − n2 γ2 .
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
138
Os próximos passos nesse trabalho serão provar um Lema do tipo De Giorge para
sequências de conjuntos de Caccioppoli. Para tanto procederemos por aproximação por
conjuntos de classe C1 e então estaremos aptos a nos utilizar dos resultados do capítulo
6 deste trabalho. Doravante é necessário mostrar que nossas sequências de aproximação
satisfazem as hipóteses do capítulo 6. De fato, já nos encontramos em posição que realizar
tal tarefa mediante os lemas precedentes, assim estaremos em curso de provar o resultado
requerido.
Lema 7.8. (De Giorgi) Seja {Ej } uma sequência de conjuntos de Caccioppoli tais que
(7.57)
ψ(Ej , 1) = 0,
Z
|DχEj | −
B1
X
j≥1
Z
B1
(7.58)
Dn χ E j ≤ γ j ,
(7.59)
γj < ∞
Então para quase todo t ∈ (0, 1) existe uma sequência de conjuntos {Lj } tal que
lim γ−1 ψ(Lj , t) = 0,
(7.60)
j→∞
lim
j→∞
γ−1
j
lim
j→∞
∂Lj ∩ Bt
Z
γ−1
j
|DχLj | −
Bt
Z
Bt
|DχEj |
= 0,
Z
Z
DχL −
DχEj = 0,
j
Bt
(7.61)
(7.62)
Bt
uma hipersuperfcie de classe C1 ,
(7.63)
e para todo s < t
lim inf {ν(j)
n ; |x| < s, x ∈ ∂Lj } = 1
j→∞
onde ν(j) é a normal a ∂Lj em x.
Proof: Tome εj =
γ4j
e fj (x) =
τ < 1,
lim
j→∞
Z
(7.64)
ηεj (x − y)χEj (y)dy. Então de (7.48) e (6.14), se
supγ−4
j
Z
Bτ
|fj − χEj |dx ≤
nwn
2
(7.65)
e disso segue quando γj → 0 que existe um conjunto de conteúdo nulo N1 ⊆ (0, 1) tal que
para t ∈ (0, 1) − N1
lim
j→∞
γ−3
j
Z
∂Bt
n−1
|fj − χ−
=0
Ej |dH
(7.66)
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
139
Z
X
γj |DχEj |. De (7.59) e (6.14),
dµ < ∞ e dessa forma
Denotemos por µ a medida
B1
j≤1
Z
como as funções
dµ é monótona não-decrescente em t e portanto segundo resultados
Bt
de teoria da medida, diferenciáveis em quase todo ponto, podemos concluir que existe um
conjunto de conteúdo nulo N2 tal que para todo t ∈ (0, 1) − N2
lim
j→∞
γ−4
j
Z
Bτ+γ4 −Bt
j
Assim pela definição de µ,
supγ−3
j
lim
j→∞
Z
Bτ+γ4 −Bt
j
|DχEj | < ∞ para t ∈ (0, 1) − N2
e assim de (7.49) e o fato que γj → 0,
lim
j→∞
supγ−2
j
Z
|Dfj | −
Bt
dµ < ∞
Z
|DχEj |
Bt
≤ 0 para t ∈ (0, 1) − N2 .
(7.67)
Se definirmos Sj (ϑ) = {x ∈ B1 ; fj (x) > ϑ} então do Teorema (Fórmula da Coárea)
(2.7.1) teremos
Z
que
|Dfj | =
Z1
dϑ
0
Bt
Z
Bt
|DχSj (ϑ) | ≥
Z 1−n2 γ2j
dϑ
n2 γ2j
Z
|DχSj (ϑ) |
Bt
Portanto, segue do mostrado acima que existe um número ϑj ∈ (n2 γ2j , 1 − n2 γ2j ) tal
(1 −
2n2 γ2j )
Z
Bt
|DχSj (ϑj ) | ≤
Z
|Dfj |
(7.68)
Bt
Além disso, da Observação (7.1), a fronteira de Lj = Sj (ϑj ) é regular. Da sentença
(7.67) e (7.68)
lim
j→∞
supγ−1
j
Z
|DχLj | −
Bt
Z
|DϕEj |
Bt
≤ 0 para t ∈ (0, 1) − N2
(7.69)
Em contrapartida do Lema (2.3)
Z
|χLj − χEj |dH
∂Bt
n−1
≤ (nγj )
−2
Z
∂Bt
|ft − χEj | para t ∈ (0, 1)
e dessa forma da sentença (7.66)
lim
j→∞
γ−1
j
Z
∂Bt
|χLj − χEj |dHn−1 = 0 para t ∈ (0, 1) − N1
(7.70)
CAPÍTULO 7. APROXIMAÇÃO DE CONJUNTOS MINIMAIS
140
Da sentenaça (7.70) e da desigualdade (6.5) da Observação (6.4) concluimos que
lim
j→∞
supγ−1
j
Z
|DχEj | − |DχLj |
Bt
≤ 0 para t ∈ (0, 1) − N1
(7.71)
a qual juntamente com (7.69) fornece (7.61).
Em contrapartida, se f ∈ BV(B1 ), então pela sentença (4.19)
Z
Df =
Bt
Z
f
∂Bt
x
dHn−1
|x|
e dessa forma a sentença (7.62) segue de (7.70).
Finalmente, a sentença (7.60) é uma consequência de (7.70), (7.61)e Lema (6.3) , e,
(7.63), (7.64) seguem do Teorema (7.3.1).
Teorema 7.3.2. (De Giorgi) Seja {Ej } uma sequência de conjuntos de Caccioppoli tais
que
Z
B1
ψ(Ej , 1) = 0,
Z
|DχEj | −
Dn χ E j ≤ γ j ,
B1
X
j≥1
então para todo 0 < α < 1, temos
lim
j→∞
sup γ−1
j
Z
Bα
γj < ∞
Z
|DχEj | − Bα
DχEj ≤ αn+1
(7.72)
Proof: Seja {Lj } a sequência de conjuntos determinados pelo Lema anterior (7.8) e
suponhamos que a desigualdade deste mesmo Lema (7.8) seja verdade para t < 1. Tome
s < t positivo. Então a sequência {Lj } satisfaz as hipóteses do Lema (6.5) com ρ = s e
βj
= 1. Do Lema (6.5), e das sentenças (7.61) e (7.64)
com sequência βj tal que lim
j→∞ γj
segue imediatamente que
lim
j→∞
supγ−1
j
Z
Bα
Z
|DχEj | − Bα
α n+1
DχEj ≤
s
Agora basta tomar s e t próximos de 1 e isso finaliza a demonstração do Teorema.
Capítulo
8
Regularidade de Superfícies Mínimas
Conteúdo
8.1
Teoria de Regularidade Básica (Analiticidade) . . . . . . . . . . . . . . . . . . 142
8.1.1
Hölder continuidade da fronteira reduzida . . . . . . . . . . . . . . . . 147
8.2
O Teorema de Regularidade C0,α . . . . . . . . . . . . . . . . . . . . . . . . . 150
8.2
Pontos Singulares e Cones Mínimos
8.3.1
. . . . . . . . . . . . . . . . . . . . . . . 157
O Teorema de Simon e a regularidade em dimensões baixas (n ≤ 7) . . . 158
8.4
Estimativa de Federer da dimensão do conjunto singular . . . . . . . . . . . . . 159
8.5
Regularidade C1,α para hipersuperfícies Minimas . . . . . . . . . . . . . . . . . 160
8.5.1
O Teorema de De Giorgi-Federer-Massari-Miranda . . . . . . . . . . . . 160
8.5.2
Os casos p < n e p = n na análise dos teoremas de regularidade . . . . . 162
8.5.3
Comentários Finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
N
este capítulo será provado a regularidade parcial de superfícies mínimas, de fato,
mostrar-se-á que a fronteira reduzida ∂∗ E é uma superfície analítica, e, as únicas
prováveis singularidades ocorreram em ∂E−∂∗ E. Uma ferramenta indispensável para nosso
estudo da teoria de regularidade será o Lema de De Giorgi. Mostra-se-á que superfícies
mínimas são regulares nos pontos as quais as mesmas satisfazem aas hipóteses desse Lema.
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
142
8.1 Teoria de Regularidade Básica (Analiticidade)
Teorema 8.1.1. (Lema de decaimento de De Giorgi) Para todo n ≥ 2 e todo
0 < α < 1, existe uma constante σ(n, α) tal que: se E ⊂ Rn é um conjunto de Caccioppoli,
x ∈ Rn , ρ > 0 e
(CDG)
Z
B(x,ρ)
então
Z
B(x,αρ)
Z
|DχE | − ψ(E, B(x, ρ)) = 0,
Z
|DχE | − DχE < σ(n, α)ρn−1 ,
(8.1)
(8.2)
B(x,ρ)
B(x,αρ)
Z
n
DχE ≤ α
B(x,ρ)
Z
|DχE | − B(x,ρ)
DχE .
(8.3)
Proof: Suponha por contradição que o Teorema não seja verdadeiro. Então deverão
existir n ≥ 2, 0 < α < 1, uma sequência {Fj } ⊂ Rn de conjuntos de Cacciopploli e
sequências {xj } ⊂ Rn e {ρj }, {γj } ⊂ R tais que
ψ(Fj , B(xj , ρj )) = 0,
Z
Z
|DχFj | − DχFj = γj ρjn−1 ,
B(xj ,ρj )
B(xj ,ρj )
X
γj < ∞
j≥
e
Z
Z
|DχFj | − DχFj ≥ αn γj ρjn−1 .
B(xj ,αρj )
B(xj ,αρj )
Para cada j, aplicaremos uma translação aos ZFj a qual leva os xj na origem,
DϕFj sobre o eixo-xn e para
posteriormente uma rotação a qual leva os vetores
B(0,αρj )
finalizar uma dilatação de razão ρj . Se denotarmos por Ej os conjuntos resultantes então
teremos
Z
Z
B1
B1
ψ(Ej , 1) = 0,
Z
|DχEj | −
D n χ E j = γj ,
Z
|DχEj | − B1
B1
Dn χEj > αn γj .
A sequência {Ej } assim definida contradiz o Teorema (7.3.2). Concluímos dessa forma
que o Teorema é verdadeiro.
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
143
Veremos agora que os pontos x para os quais são satisfeitas as hipóteses do Teorema
(8.1.1) (Lema de Decaimento de De Giorgi) são de fato pontos da fronteira reduzida, ∂∗ E,
sendo tal afirmativa uma consequência do que se segue.
Teorema 8.1.2. (De Giorgi) Suponha as mesmas hipóteses do Teorema anterior e
x ∈ ∂E. Então para todo s, t tais que 0 < s < t < ρ
|νs (x) − νt (x)| ≤ η(α, n)
r
t
,
ρ
(8.4)
√ s
(2 − α) σ(n, α)
√
onde η(α, n) =
(1 − α) wn−1 αn
Proof: Se fizermos as devidas transformações (translações, rotações e dilatações se
necessário) poderemos supor sem perda de generalidade que x = 0 e ρ = 1
Primeiramente, suponhamos o caso em que t = αj , s = βαj para algum j e α ≤ β < 1
Sejam
Z
uj = ναj = Z
vj = νβαj , mj =
Z
DχE
Bαj
|DχE |
Bαj
|DχE | e µj =
Bαj
Dado que |uj | ≤ 1 e |vj | ≤ 1 teremos |uj − vj | ≤
Agora
(1 − (uj , vj ))µj =
Z
βαj
Z
|DχE |
Bβαj
√ p
2 1 − (uj , vj )
(|DχE | − huj , DχE i) ≤
≤ mj (1 − |uj |2 ) ≥ 2mj (1 − |uj |).
Em contrapartida de (8.3) e (8.2) repetido o argumento j vezes teremos
mj (1 − |uj |) ≤ αnj σ(n, α) e assim |uj − vj | ≤ 2
p
σ(n, α)
s
αpj
µj
Entretanto, por hipótese assumimos que x = 0 ∈ ∂E, pela sentença (6.16) teremos
µj ≥ wn−1 (αj β)n−1 ≥ wn−1 α(j+1)(n−1) e assim |uj − vj | ≤ 2
s
σ(n, α) √ j+1
α
wn−1 αn
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
144
Agora vejamos o caso geral para s e t, ou seja, com 0 < s < t < 1. Sejam j e k dois
inteiros tais que
αj+1 < i ≤ αj e αj+k ≤ s < αj+k−1
Assim,
k−2
X
|uj+i − uj+i+1 | + |uj+k−1 − νs | ≤
|νt − νs | ≤ |νt − uj | +
i=0
s
X√
√
σ(n, α)
αj+1 +
αj+i+1 =
2. ≤
wn−1 αn
i≥0
s
X√
σ(n, α) √ j+1
=
1+
α
αi =
wn−1 αn
i≥0
√ s
(2 − α) σ(n, α) √ j+1
√
=
α ≤
(1 − α) wn−1αn
√ s
(2 − α) σ(n, α) √
√
t=
≤
(1 − α) wn−1 αn
√
= η(α, n) t
como desejávamos.
Corolário 8.1. (De Giorgi) Suponha que x satisfaz as hipóteses do Teorema anterior
(8.1.2). Então x ∈ ∂∗ E e
|ν(x) − νt (x)| ≤ η(α, n)
r
t
ρ
Proof: O Teorema (8.1.2) nos informa que νt (x) é uma sequência de Cauchy em
Rn . Além do mais como x satisfaz a (CDG), vale o Lema de decaimento de Diorgi. Ao
aplicarmos o mesmo j vezes teremos |ναj ρ | → 1 quando j → ∞. Portanto x ∈ ∂∗ E.
A estimativa obtida na desigualdade segue mutatis mutandis a desigualdade do Teorema
anterior (8.1.2), via a homogeneidade das propriedades de translação e rotação. Portanto
segue que
|ν(x) − νt (x)| ≤ η(α, n)
r
t
ρ
Observação 8.1. A prova da regularidade (analiticidade) de ∂∗ E se dará ao passo que
mostrarmos que ∂∗ E é relativamente aberto em ∂E juntamente com o fato que ν(x)
é contínuo, de fato, Hölder contínuo como veremos a seguir, utilizando para tanto
(Regularidade elíptica) Teoria de equações diferenciais parciais elípticas, como será visto
no capítulo seguinte.
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
145
Teorema 8.1.3. (De Giorgi) Sejam E ⊂ Rn um conjunto de Caccioppoli, x ∈ ∂E, ρ > 0
e 0 < α < 1 tais que
Z
B(x,ρ)
ψ(E, B(x, ρ)) = 0,
Z
|DχE | − DχE ≤ σ(n, α)ρn−1
B(x,ρ)
n
Então ∂E ∩ B(x, r) é uma hipersuperfície analítica para r = ρ(α − α n−1 ).
n
Proof: Sejam z ∈ ∂E ∩ B(x, r) e R = ρα n−1 . Como B(z, R) ⊆ B(x, αρ) dado que ,
n
ρα n−1 ≤ αρ, teremos
Z
B(z,R)
Z
|DχE | − B(z,R)
Z
DχE ≤
B(x,αρ)
Z
|DχE | − B(x,αρ)
Disto segue de como fora tomado o R que
Z
B(z,R)
Z
|DχE | − B(z,R)
DχE ≤ σ(n, α)αn ρn−1
DχE ≤ σ(n, α)Rn−1
Assim z satisfaz a hipótese do Corolário (8.1) e por conseguinte z ∈ ∂∗ E com
Z
r
DχE B(z,t)
≤ η(α, n) t
|ν(z) − νt (z)| = ν(z) − Z
R
|DχE | (8.5)
B(z,t)
A sentença (8.5) se verifica para todo z ∈ B(x, r)∩∂E. Via um argumento de integração
na sentença (8.5) podemos obter
Zt Z
r
ds
DχE t
0
B(z,s)
≤ η(α, n)
ν(z) − Z t Z
R
ds
|DχE | 0
B(z,s)
e(t, z) =
Se analizarmos a função ν
Zt
0
Zt
0
ds
ds
Z
Z
DχE
B(z,s)
, concluiremos que a mesma é
|DχE |
B(z,s)
contínua nas variáveis t e z, e, segue da sentença (8.6) que
e(t, z) = ν(z) uniformemente para z ∈ B(x, r),
lim ν
t→0
(8.6)
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
146
Disso segue a continuidade de ν(z) em ∂E ∩ B(x, r) e dessa forma mediante o Teorema
(5.3.2) segue que ∂E ∩ B(x, r) é uma hipersuperfície de classe C1 . Se nos utilizarmos
de Teoria de Regularidade para Equações Diferenciais Parciais Elípticas (Veja próximo
capítulo) consiguiremos mostrar que de fato ∂E ∩ B(x, r) é uma hipersuperfície analítica.
Teorema 8.1.4. (De Giorgi-Miranda) Seja E um conjunto Caccioppoli satisfazendo
ψ(E, 1) = 0. Então
Hn−1 (∂E − ∂∗ E) = 0
(8.7)
Proof: Seja K ⊂ ∂E − ∂∗ E um conjunto compacto
qualquer. Segue da definição de
Z
fronteira redizida e da nota subsequente a esta que |DχE | = 0
K
Dessa forma, sendo |DχE | uma medida de Radon,
Z tem-se para todo ε > 0 dado, existe
uma conjunto aberto Aε com K ⊂ Aε ⊂ B1 tal que |DχE | < ε
K
Tome η > 0. Para todo x ∈ K existe ρ < η tal que B(x, 3ρ) ⊆ Aε . Então pelo Lema
de Recobrimento de Vitali (3.1) podemos escolher uma sequência {xj } tal que
B(xj , ρj ) ∩ B(xi , ρi ) = ∅ se i 6= j
[
B(xj , 3ρj ) ⊇ K
j≥1
Agora temos,
XZ
j≥1
B(xj ,ρj )
|DχE | ≤
Z
|DχE | < ε
Aε
Em contrapartida da sentença (6.16) temos
Z
B(xj ,ρj )
|DχE | ≥ wn−1 ρjn−1 e portanto wn−1
X
j≥1
ρn−1
≤ε
j
Assim, se aplicarmos a definição de medida de Hausdorff teremos Hn−1 (K) ≤ 3n−1 ε
e dado que o ε fora tomado arbitrariamente segue que Hn−1 (K) = 0 e isso completa a
demonstração.
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
147
8.1.1 Hölder continuidade da fronteira reduzida
i. Se A1 ⊂ A2 ⊂ Ω então ψ(E, A1 ) ≤ ψ(E, A2 )
Proposição 8.1.
ii. Se x ∈ ∂∗ E ∩ Ω então lim+ ρ1−n ψ(E, Bρ (x)) = 0.
ρ→0
Proof: Veja Gonzalez-Massari [70] pag. 19.
Lema 8.1. (Lema de decaimento de De Giorgi versão geral) Sejam K > 0, ǫ >
0, α ∈ (0, 1); então existe uma constante positiva σ = σ(K, ǫ, α) tal que, para todo
conjunto de Caccioppoli E (K, ǫ)−minimal, x ∈ Ω, η ∈ (0, σ], 0 < ρ < dist(x, ∂Ω),
ǫ
ρ < η 2 temos
ǫ
ψ(E, Bρ (x)) ≤ ηρn−1 ⇒ ψ(E, Bαρ (x)) ≤ α 2 η(αρ)n−1
(8.8)
Proof: Mutatis mutandis a demonstração do Lema de decaimento de De Giorgi
apresentado nesse texto.
Aplicando h vezes (8.8) obteremos a seguinte estimativa
hǫ
ψ(E, Bαh ρ (x)) ≤ α 2 η(αh ρ)n−1
(8.9)
Como consequência deste do Lema de Decaimento de De Diorgi e em particular a
desigualdade acima (8.9) temos o seguinte
Teorema 8.1.5. Sejam K, ǫ, α, σ, E, Ω, x, η, ρ como no Lema acima e suponha que
ψ(E, Bρ (x)) ≤ ηρn−1
Então x ∈ ∂∗ E ∩ Ω.
Proof:
Faremos uso Z da seguinte desigualdade :
mensuráveis de Ω tal que
A
|DχE | < ∞; então
Sejam A ⊂ B subconjuntos
Z
Z
1
Z 1
νd(|DχE |)(x) − Z
νd(|DχE |)(x) ≤
|DχE | A∩∂E
|DχE | B∩∂E
A
B
v
Z
Z
u
1
u
|DχE | − νd(|DχE |)(x)
≤ uZ
t
B∩∂E
|DχE | B
A
Seja, para T ∈ (0, ρ),
ν(x, t) = Z
1
|DχE |
Bt (x)
Z
ν(x)d(|DχE |)(x)
Bt (x)∩∂E
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
148
νj (x) = ν(x, αj ρ)
e notando que νj (x) é uma sequência de Cauchy em Rn . De fato, da (K, ǫ)−minimalidade
de E segue que
Z
j
Bαj ρ (x)
|DχE | ≥ (α ρ)
n−1
(n − 1)K j ǫ
(α ρ)
wn−1 −
ǫ
≥
wn−1 j n−1
= c3 ρn−1 αj(n−1)
(α ρ)
2
(8.10)
para todo j ≥ j0 (K, ǫ, α, ρ). De (8.9) inferimos que para j ≥ j0 e m ∈ N
m−1
X
|νj+m (x) − νj (x)| ≤
|νj+h (x) − νj+h+1 (x)| ≤
h=0
s
r
m−1
m−1
X ηρn−1 α(j+h)(n−1+ ǫ2 )
jǫ X
hǫ
η
4
=2
α
α4 ≤
≤2
n−1
(j+h+1)(n−1)
n−1
c3 ρ α
c3 α
h=0
h=0
r
jǫ
η
1
4
≤2
ǫ α
c3 αn−1 1 − α 4
(8.11)
Dessa forma, podemos definir ν(x) = lim νj (x). Note agora que
j→∞
ǫ
ψ(E, Bαj ρ (x))
ηρn−1 αj(n−1+ 2 )
Z
≤
1 − |νj (x)| =
c3 ρn−1 αj(n−1)
|DχE |
Bαj ρ (x)
de onde obtemos que |ν(x)| = 1.
Agora tome ρ0 = αj0 ρ, t ∈ (0, ρ0 ) e seja j ≥ j0 de sorte que αj+1 ρ ≤ t ≤ αj ρ. Temos
dessa forma que
s
v
r
ǫ
u ψ(E, B j (x))
jǫ
ηρn−1 αj(n−1+ 2 )
η
αρ
u
4 .
|νj (x) − ν(x, t)| ≤ 2u Z
≤
α
≤2
c3 ρn−1 α(j+1)(n−1)
c3 αn−1
t
|DχE |
Bαj ρ (x)
E isso mostra que x ∈ Ω ∩ ∂∗ E.
Teorema 8.1.6. Sejam E ⊂ Rn um conjunto (K, ǫ)−minimal em Ω e x ∈ ∂∗ E ∩ Ω.
Então existe um r > 0 tal que
Br (x) ∩ ∂∗ E = Br (x) ∩ ∂E,
isto é, ∂∗ E é relativamente aberto em ∂E. Além disso,
(8.12)
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
149
ǫ
(8.13)
|ν(y) − ν(z)| ≤ c2 |y − z| 4 ∀y, z ∈ Br (x) ∩ ∂E
ou seja, v é uma aplicação Hölder contínua.
Proof: Seja α ∈ (0, 1); da parte (ii) da Proposição (8.1) acima obtemos a existência
ǫ
de 0 < ρ < dist(x, ∂Ω), ρ < σ 2 tal que
ψ(E, Bρ (x)) ≤ σρn−1
Sejam k ∈ N tal que
kǫ
2
′
> n − 1 e r = ραk (1 − α). Então para y ∈ Br ′ (x) ∩ ∂E tem-se
Bαk+1 ρ (y) ⊂ Bαk ρ (x)
e portanto
kǫ
kǫ
ψ(Bαk+1 ρ (y)) ≤ ψ(Bαk ρ (x)) ≤ α 2 σ(αk ρ)n−1 = α 2 −(n−1) σ(αk+1 ρ)n−1 ≤ σ(αk+1 ρ)n−1
(8.14)
Da sentença (8.14) conclui-se que o Teorema (8.1.5) aplicado a ρ1 = αk+1 ρ ao invés
de ρ fornece que y ∈ Ω ∩ ∂∗ E
Vejamos agora a sentença (8.13): Sejam y, z ∈ Br ′ (x) ∩ ∂E e h, m ∈ N. da sentença
(8.11) obtemos as seguintes desigualdades
|ν(y) − νh (y)| ≤ c4 α
|ν(z) − νh+m (z)| ≤ c4 α
hǫ
4
(h+m)ǫ
4
segue para h ≥ h0 = h0 (ǫ, ρ, k). Assim, a desigualdade (8.13) seguirá da seguinte
desigualdade elemetar
|ν(y) − ν(z)| ≤ |ν(y) − νh (y)| + |νh (y) − νh+m (z)| + |νh+m (z) − ν(z)|,
desde que tenhamos uma estimativa adequada para |νh (y)−νh+m (z)|. Isto é feito tomando
|y − z| ≤ αh ρ1 (1 − αm ) como Bαh+m ρ1 (z) ⊂ Bαh ρ1 (y) e notando que neste caso
hǫ
|νh (y) − νh+m (z)| ≤ 2
σα 2 αh(n−1)
c3 α(h+m)(n−1)
! 12
=2
σ
c3
αm(n−1)
12
α
hǫ
4
Agora escolhamos m ∈ N de forma que α < 1 − αm e portanto ρ1 αk+1 < ρ1 αh (1 − αm ).
Tome r =
que
1
2
′
min{r , ρ1 αh0 (1 − αm )}. Para y, z ∈ Br (x) ∩ ∂E, y 6= z, existe h ≥ h0 tal
ρ1 αh+2 < |y − z| < ρ1 αh (1 − αm )
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
150
e portanto podemos concluir que
|ν(y) − ν(z)| ≤ c5 α
hǫ
4
≤ c5
|y − z|
α2 ρ1
ǫ4
ǫ
= c6 |y − z| 4
Figura 8.1: O comportamente de decaimento diádico na bola, segundo o Lema de decaimento
de De Giorgi. Tal fenômeno somente seria possível se desde o início a função
(superfície) que descreve tal processo fosse Hölder contínua. Essa interpretação se
dá via a concepção de Sergio Campanato [69] sobre Hölder continuidade de funções.
8.2 O Teorema de Regularidade C0,α
Para esta seção nos desposeremos a utilizar os Lemas dos capítulos precedentes que
se referem a aproximação local por hipersuperfícies suaves e harmônicas de conjuntos
minimais, juntamente com alguns Lemas Técnicos e fundamentais para tais objetivos,
finalizando este com uma conclusão de Hölder continuidade da fornteira reduzida, ∂∗ E,
segundo a caracterização desta, ou seja, Hölder continuidade segundo o ponto de vista
dos trabalhos de Sergio Campanato [69]. Mais precisamente:
Teorema 8.2.1. (Campanato - Caracterização integral de Hölder continuidade)
Seja u ∈ L1 (Ω), 0 < α < 1 e suponha que exista M > 0 tal que
1
|Br |
Z
Br
|u − uBr |dx ≤ Mrα
para toda bola Br ⊂ Ω. Então u ∈ C0,α (Ω) e para alguma bola BR ⊂ Ω temos
oscB R u ≤ c(n, α)MRα .
2
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
151
onde oscB R u = supB R − inf B R .
2
2
2
Proof: Veja Jost [103], pag. 206.
Proposição 8.2. Considere E ⊂ Rn e α ∈ (0, 1). Então E é localmente de classe C1,α se
e somente, o mesmo for de classe C1 e
ψ(E, Bρ (x)) ≤ cρn−1+2α
para todo x ∈ ∂E e todo ρ > 0 (pequeno), onde c > 0.
Proof: Com a notação introdzida nos capítulos precedentes sejam
′
′
Bρ = {x ∈ Rn ; |x| < ρ}, Bρ = {x , |x < |ρ}
e
′
′
Qρ = {x ∈ Rn ; x = (x , xn ), |x |, |xn | < ρ} = Bρ × (−ρ, ρ)
′
′
′
Suponha que nos fora dada u ∈ C1,α (A , R), com A aberto em Rn−1 e 0 ∈ A , tal
que u(0) = 0 e Du(0) = 0. Tais hipóteses são sempre possíveis, basta aplicar uma
transformação ortogonal em u a fim da mesma satisfazer tais suposições.
′
′
′
Ao tomarmos E = {x ∈ Rn ; x ∈ A , xn > u(x )} obtemos que (para ρ pequeno de sorte
que |v| < ρ):
ψ(E; Bρ ) ≤ ψ(E; Qρ ) =
Z
BZρ
1
≤
2
p
Bρ
1+
|Du|2 dx
′
2
′
− inf
Z
p
′
1 + |Dv|2 dx ; spt(u − v) ⊂ Bρ
Bρ
n−1+2α
|Du| dx ≤ cρ
da qual a parte do “somente se” da proposição segue. Quanto ao caso “se”, assuma u ∈
′
′
′
C1 (A ; R), novamente com A aberto em Rn−1 e 0 ∈ A , tal que u(0) = 0 e Du(0) = 0.
Agora nossa hipótese é :
ψ(E, Bρ (x)) ≤ cρn−1+2α
′
′
′
para todo x = (x , u(x )) e todo ρ > 0 tal que |x | e ρ são menores que algum R > 0, com
E como antes.
1
′
′
, então fixados x , ρ, R tais que x ∈ Br
4
B3r
′
e 0 < ρ < R ≤ 2r. Seja v a função harmônica associada a uZ em BR (x ), satisfazendo,
2
Escolha r tal que 0 < r < R2− 3 , sup |Du| <
′
∆v = 0 em BR (x ), v = u em ∂BR (x ), e, {Du}ρ = |BR (x )|−1
′
′
Das propriedades das funções harmônicas segue-se que:
Du
′
BR (x )
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
Z
′
|Du − {Du}ρ |
BR (x )
2
Z
Z
|Dv − {Dv}ρ |2
BR (x )
ZBR (x )
ρ n+1 Z
2
2
≤
(|Du| − |Dv| ) + 2
.
|Dv − {Dv}R |2 .
′
′
R
BR (x )
BR (x )
≤
2
152
|Du − Dv| + 2
′
′
Introduzindo |{Dv}R |2 na primeira integral do lado direito e se utilizando da desigualdade:
p
p
(A2 − B2 ) − (A2 − B2 )2
√
1 + A2 − 1 + B 2 ≥
2 1 + B2
vem que
Z
|Du − {Du}ρ |
′
p
Z
p
p
1 + |{Du}R |2
≤
.
( 1 + |Du|2 − 1 + |{Du}R |2 )
′
BR (x )
Z 1 − mR
ρ n+1 Z
2
2
+2
(|{Du}R | − |Dv| ) + 2
.
|Dv − {Dv}R |2 .
′
′
R
BR (x )
BR (x )
4
2
BR (x )
onde
mR =
sup |Du| + |{Du}R |
BR (x ′ )
Introduzindo
desigualdade:
p
!2
(8.15)
.
1 + |Dv|2 na primeira integral do lado direito e se utilizando da
p
1 + A2 −
p
(A2 − B2 )
1 + B2 ≤ √
2 1 + B2
e ao rearranjarmos os termos obteremos
Z
′
BR (x )
|Du − {Du}ρ |
2
≤
6ψ(E; B√2R (x
ρ
+2( )n+1 .
R
≤ c1 R
Z
′
2mR
, u(x ))) +
.
1 − mR
′
2
Z
′
(|Dv|2 − |{Du}R |2 )
BR (x )
2
(|Dv| − |{Dv}R | )
BR (x ′ )
n−1+2α
Z
ρ n+1
2mR
+2 ( )
+
|Du − {Du}R |2 .
.
′
R
1 − mR
BR (x )
Desta forma, tomando β = n − 1 + 2α e
ω(t) =
teremos:
Z
′
BR (x )
|Du − {Du}t |2 , 0 < t ≤ 2r,
ρ n+1
2mR
ω(ρ) ≤ c1 R + 2 ( )
+
.ω(R)
R
1 − mR
β
(8.16)
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
153
′
para x ∈ BR e para todo ρ, R tais que 0 < ρ < R ≤ 2r.Agora, veja Campanato [80], seção
6, fixados γ e τ tais que
β < γ < n + 1, 4τn+1 < τγ
da sentença (8.16) segue então
β
n+1
ω(τR) ≤ c1 R + 2τ
mR
−n−1
τ
1+
ω(R)
1 − mR
Podemos assumir que inicialmente o raio r era tão pequeno que sup |Du| ≤
que (veja (8.15)):
mR
1−mR
B3r
τn+1
de modo
8
≤ τn+1 , então
ω(τR) ≤ c1 Rβ + τγ .ω(R),
′
∀x ∈ Br e 0 < R ≤ 2r.
Prosseguindo indutivamente temos para todo k ≥ 0
k
ω(τ R) ≤ τ
kβ
Rβ
c1 β
+ ω(R)
τ − τγ
do qual, dado que ∀ρ : 0 < ρ < R ≤ 2r existe k ≥ 0 tal que τk+1 ≤ ρ < τk R, usando da
monotonicidade de ω e escolhendo R = 2r, obtemos finalmente:
Z
′
BR (x )
|Du − {Du}ρ |2 ≤ c2 ρn−1+2α ,
′
′
para todo x ∈ Br e todo ρ ∈ (0, 2r), com c2 independente de x e de ρ. Em vista da
caracterização de funções Hölder contínuas mediantes os resultados de Campanato [69],
isto implica que Du ∈ C0,α (Br ). Portanto u ∈ C1,α (Br ) como desejávamos.
Lema 8.2. (Lema Técnico) Seja E ⊂ Rn , n ≥ 2 um conjunto de Caccioppoli. Então
para todo x ∈ Rn e todo 0 < s < t segue que
Z
n−1
2
|χE (x + t(y − x)) − χE (x + s(y − x))|dH (y) ≤
Z
" 1−n
1−n
|y − x| |DχE |(y) t
|DχE |−
≤2
s≤|x−y|<t
B
(x)
t
Z
Zt
1−n
−n
−s
|DχE | + (n − 1) ρ ψ(E, Bρ (x))dρ
|x−y|=1Z
Bs (x)
(8.17)
s
Proof: A demosntração é análoga ao do Lema (6.4).
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
154
Suponhamos agora que as condições sobre ψ seguem uniformemente em um conjunto
Γ ⊂ ∂E, isto é,
(8.18)
ψ(E, Bρ (x)) ≤ cρn−1+2α ∀x ∈ Γ, ρ ∈ (0, R)
com constantes positivas c, α, R dadas a princípio.
Lema 8.3. (Lema de Monotonicidade) Se (8.18) se verifica, tomando e
c=
temos para todo x ∈ Γ :
ρ
1−n
Z
Bρ (x)
|DϕE | + e
cρ2α
Z
|DϕE | ≤
é uma função decrescente em (0, R);
cρ
wn−1 e
2α
≤ρ
1−n
Bρ (x)
(n − 1)c
,
2α
(8.19)
nwn
+ ρ2α .
2
(8.20)
Proof: Usando (8.17) e (8.18) segue imediatamente (8.19); agora, se x ∈ ∂∗ E, então
lim
Z
ρ→0+ B (x)
ρ
|DχE | = wn−1 ,
portanto a primeira desigualdade em (8.20) segue de (8.19) ao tomarmos ρ → 0+ . No
caso geral poderemos provar tal resultado via argumento de aproximação uma vez que
∂∗ E = ∂E; como consequência desta segue que para todo x ∈ Γ , ρ ∈ (0, R) e τ ∈ (0, 1),
existirá um ponto z ∈ Γ ∩ ∂∗ E tal que |x − z| < (1 − τ)ρ. Portanto:
1−n
ρ
Z
1−n
Bρ (x)
|DχE | ≥ ρ
Z
|DχE | ≥ τn−1 [wn−1 − c3 (τρ)2α ]
Bτρ (x)
da qual obtemos a relação desejada ao tomarmos τ → 1.
Em contrapartida, a
segunda desigualdade em (8.20) segue de (8.16) ao utilizarmos a definição de desvio de
minimalidade e a seguinte desigualdade:
Z
Z
Z
inf
|DχE |; F△E ⋐ Bρ (x) ≤ min
|DχE∪Bτρ (x) |,
|DχE−Bτρ (x) |
B
ρ (x)
Z
Z Bρ (x)
Z Bρ (x)
+ min
χE dHn−1 ,
(1 − χE )dHn−1 ≤
=
∂Bτρ (x)
∂Bτρ (x)
ZBρ (x)−Bτρ (x)
nwn
+
(τρ)n−1
≤
2
Bρ (x)−Bτρ (x)
=
(8.21)
a qual se verifica para quase todo τ ∈ (0, 1).
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
155
Lema 8.4. (Procedimento de Blow-up) Se (8.18) se verifica, com 0 ∈ Γ , então ao
tomarmos ρh ↓ 0 em
n
Eh = ρ−1
h E{x ∈ R ; ρh x ∈ E}
uma subsequência de {Eh } convirgirá localmente em Rn , para um cone minimal C de Rn ,
com 0 ∈ ∂C.
Proof: Para um t > 0 fixado e para todo h suficientemente grande (àqueles os quais
ρh t < R) teremos de (8.20):
Z
|DχEh | =
ρ1−n
h
Bt
Z
B ρh t
|DχE | ≤
h nw
n
2
i
+ cR2α .tn−1
(8.22)
Usando os resultados conhecidos de compacidade, existirá uma subsequência de {Eh }
que convirgirá para algum limite C. Em contrapartida, da invariância sob translações e
transformações ortogonais do desvio de minimalidade ψ implica que:
2α n−1+2α
ψ(Eh , Bt ) = ρ1−n
h ψ(E, Bρh t ) ≤ cρh t
onde a última desigualdade segue de (8.18). Tomando h → ∞ e recordando que o desvio
de minimalidade ψ(E, .) é uma função de conjunto monótona (A1 ⊂ A2 ⇒ ψ(E, A1 ) ≤
ψ(E, A2 )) e que a mesma é semicontínua inferiomente (Eh → E localmente em A ⇒
ψ(E, A) ≤ lim inf ψ(Eh , A)) obteremos: ψ(C, Bt ) = 0 para todo t > 0, isto é, C tem
h→∞
fronteira mínima em Rn . Além disso, de
Eh → E localmente em A e ψ(Eh , A) → ψ(E, A) ⇒
Z
aberto tal que
|DχE | = 0 obtemos
∂A
Z
A
′
′
lim
Z
h→∞ B
t
|DχEh | =
para quase t > 0. Ao tomarmos b = lim+ t
t→0
Z
1−n
|DχEh | →
Z
|DχE |
Bt
′
A
′
|DχE |, ∀ A ⋐ A
(8.23)
|DχC |
Bt
Z
temos que wn−1 ≤ b ≤
nwn
2
em vista de (8.19) e (8.20), e obtemos de (8.22), (8.23):
Z
1−n
t
|DχC | = b para quase todo t > 0.
Bt
A relação (8.17) implica que
Z
|χC (ty) − χC (sy)|dHn−1 = 0 para quase todo t > 0,
|y|=1
do qual concluimos que C é (equivalente a) um cone mínimo em Rn , com vértice 0 ∈ ∂C.
Lema 8.5. (Lema de Densidade) Se (8.18) se verifica, então:
|E ∩ Bρ (x)| ≥
wn−1 ρn
∀ x ∈ Γ, ρ ∈ (o, R)
2n
(8.24)
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
156
com R = R(α, c, n)
Proof: De (8.20), primeira desigualdade, (8.18) e (8.21) obtemos facilmente para
quase todo ρ ∈ (0, R) :
2α
n−1
[wn−1 − c3 ρ ]ρ
≤
Z
Bρ (x)
|DχE | ≤
Z
χE dHn−1 + cρn−1+2α
∂Bρ (x)
isto é:
Z
∂Bρ (x)
χE dHn−1 ≥ [wn−1 − (c + c3 )t2α ].tn−1 ≥ wn−1
tn−1
2
(8.25)
1
2α
αwn−1
= R.
para quase todo t ∈ (0, R) tal que t <
c(n − 1 + 2α)
O resultado segue então por integração de (8.25) entre 0 e ρ.
Para finalizarmos enunciaremos o teorema de regularidade , o qual pode ser
demonstrado usando os Lemas precedentes juntamente com o auxílio do método de De
Giorgi (Lema de decaimento de De Giorgi).
Teorema 8.2.2. (Teorema de Regularidade C1,α ) Sejam Ω ⊂ Rn , n ≥ 2 um conjunto
aberto e E ⊂ Rn um conjunto de Caccioppoli satisfazendo para α ∈ (0, 1):
ψ(E, Bρ (x)) ≤ cρn−1+2α
(8.26)
para todo x ∈ Ω e todo ρ ∈ (0, R), com c e R constantes positivas.
Então a fronteira reduzida é uma hipersuperfície C1,α em Ω, e
Hs ((∂∗ E − ∂E) ∩ Ω) = 0
para todo s > n − 8.
Mais ainda,
Teorema 8.2.3. (Miranda) Assumindo que (8.26) se verifica uniformente para qualquer
Eh , com {Eh } localmente convergente em Ω para algum conjunto limite E∞ , temos que
se xh ∈ ∂Eh para todo h, com {xh } convergindo para algum ponto x∞ ∈ Ω; enquanto
se x∞ ∈ ∂∗ E∞ , então existe um h tal que xh ∈ ∂∗ Eh para todo h ≥ h, ou seja, há
convergência no sentido de Kuratowski1 , e, o vetor normal unitário exterior a ∂Eh em
xh converge para o vetor normal unitário exterior a ∂E∞ em x∞ .
Vejamos alguns resultados que surgem como complementação de nossas exposições:
1
Diremos que uma sequência de conjuntos (Xk ) converge a X no sentido de Kuratowski se
xk ∈ Xk , xk → x ⇒ x ∈ X
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
157
8.3 Pontos Singulares e Cones Mínimos
Nesta seção mostraremos que pontos singulares, apesar de não terem plano tangente
associado, ou seja, falta-lhes Geometria Diferencial, os mesmos estão associados a cones
tangentes. Provaremos assim que tais cones não existem, ou seja, ao menos se a dimensão
é baixa, n ≤ 7 para ser mais preciso. Dessa forma concluiremos novamente que em
baixas dimensões os pontos singulares não podem existir. Ter-se-á ao final um resultado
devido a Bombieri, De Giorgi e Guisti onde prova-se a existência de pontos singulares em
dimensões altas, os seja, a partir de 8.
Novamente revisitaremos o famoso processo de Blow up: o qual seria descrever um
procedimento de estudo local de singularidades, o mesmo é bastante difundido em várias
partes da matemática entre elas EDP.
Lema 8.6. Seja E um conjunto minimal em B1 tal que 0 ∈ ∂E. Para t > 0 defimamos
Et = {x ∈ Rn ; tx ∈ E}. então dada tj → 0 sequência de números reais existe uma
subsequência sj tal que Esj converge localmente em Rn a um cone mínimo C.
Proof: Veja Giusti [3] pag. 106.
Diremos que C como acima é o cone tangente a E em 0 e o procedimento acima é o
blow-up de E em 0. Observemos que sendo E regular em 0, é de fácil constatação que
C é um semi-espaço como averiguamos no capítulo 4 deste trabalho. O próximo Lema
tratará da recíproca.
Lema 8.7. (Miranda) Suponha que Ej é uma sequência de conjuntos minimais em B1
convergindo localmente a um conjunto mínimal C. Sejam x ∈ ∂∗ C e xj ∈ Ej , xj → x.
Então, se j é suficientemente grande, xj é um ponto regular para ∂Ej e νEj (xj ) → ν(x),
onde ν(x) é o vetor normal relativo a Ej .
Proof: Veja Giusti [3] pag. 108.
Agora poderemos enfim enunciar o:
Teorema 8.3.1. Suponha que não existam cones mínimos singulares em Rn . Então, para
qualquer E ⊂ Rn mínimal em Bρ , ∂E ∩ Bρ é hipersuperfície analítica.
Proof: É suficiente provarmos que todo ponto de ∂E∩Bρ é regular. Como Ek converge
localmente a C, cone mínimo, pelo Lema (8.6), e, por hipótese, não existem cones mínimos
x ∈⇒ ∃xk ∈ Xk , xk → x.
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
158
x
singulares, 0 é ponto regular de C. Pelo Lema (8.7), se j é suficientemente grande, xj =
j
x
é regular em Ej . Como a transformação x → preserva regularidade, x é ponto regular
j
de E.
Portanto, o problema de pontos singulares fora reduzido a existência de cones em Rn .
O próximo Teorema tratará disso.
8.3.1 O Teorema de Simon e a regularidade em dimensões baixas
(n ≤ 7)
Teorema 8.3.2. (Simon) Suponha que E seja um cone mínimo tal que seu bordo ∂E
seja regular em Rn − {0}. Então, ou ∂E é um hiperplano ou n ≥ 8.
Proof: Veja Giusti [3] pag. 125.
Um consequência imediata do Teorema de Simons é o seguinte resultado de
regularidade:
Teorema 8.3.3. Se n ≤ 7 E é mínimo em Bρ então ∂E ∩ Bρ é hipersuperfície analítica.
Proof: Basta unir o Teorema de Simons (8.3.2) e o Teorema (8.3.1) e o resultado é
imediato.
Para encerrar esta seção, o seguinte resultado dá exemplos onde o Teorema acima
falha em dimensões altas. Vejamos:
Teorema 8.3.4. (Bombieri-De Giorgi-Guisti). Seja S o cone definido por
S = {x ∈ R2m ; x21 + ... + x2m < x2m+1 + ... + x22m }
Se m ≥ 4, S é cone mínimo singular na origem. A demosntração deste resultado pode
ser encontrada em [43]. O cone S acima definido no caso m = 4, ou seja,
S = {x ∈ R8 ; x21 + ... + x24 < x25 + ... + x28 }
é dito o cone de Simons.
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
159
8.4 Estimativa de Federer da dimensão do conjunto
singular
Uma questionamento que surge naturalmente a partir dos teoremas da seção anterior
seria: existindo os pontos singulares, qual seria o tamanho máximo do conjunto singular?
Para a pergunta fazer sentido, temos que dizer o que significa “tamanho”. Mas, isto de
certa forma já fora tratado nete trabalho: nos referimos a dimensão de Hausdorff de um
conjunto. Finalmente provaremos um teorema devido a Federer segundo o qual o conjunto
singular Σ = ∂E − ∂∗ E tem dimensão de Hausdorff no máximo n − 8. Resumidamente
este teorema refina o Teorema (8.1.4) de De Giorgi-Miranda. Para tanto, será necessário
a utilização de alguns Lemas.
Lema 8.8. Seja E um conjunto mínimo em Ω ⊂ R8 . Então o conjunto singular Σ ∩ Ω
consiste no máximo de pontos isolados.
Proof: Veja Giusti [3] pag. 133.
Observação 8.2. Sob as hipóteses do Lema acima, caso E seja um cone, então o conjunto
singular tem no máximo um ponto. De fato, se tivesse mais de um ponto então, como
E é cone, toda semi-reta ligando estes dois pontos seria formada por pontos singulares,
contrariando assim a conclusão do Lema.
Lema 8.9. Suponha que E seja um conjunto mínimal em Ω tal que Hk (Σ) > 0. Então
existe C, cone mínimo em Rn , tal que Hk (∂C − ∂∗ C) > 0.
Proof: Veja Giusti [3] pag. 132.
Lema 8.10. Se C é cone mínimo com Hk (∂C − ∂∗ C) > 0 então existe x0 6= 0 tal que
fazendo o blow-up de C em x0 obtemos um cilindro mínimo Q = A × R com Hk (∂Q −
∂∗ Q) > 0. Mais ainda, A é um cone mínimo.
Proof: Veja Giusti [3] pag. 133.
Finalmente poderemos enunciar o
Teorema 8.4.1. (Federer) Suponha que E seja minimal em Ω e seja Σ = (∂E−∂∗ E)∩Ω.
Então Hs (Σ) = 0 ∀s > n − 8.
Proof: Seja k > 0 com Hk (Σ) > 0. Pelo Lema (8.9) podemos construir um cone
mínimo C em Rn tal que Hk (∂C − ∂∗ C) > 0. Pelo Lema (8.10), existe x0 6= 0 tal que
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
160
fazendo o blow-up de C por x0 obtemos um cilindro Q = A × R com Hk (∂Q − ∂∗ Q) > 0.
Logo o cone mínimo A satisfaz Hk−1 (∂A − ∂∗ A) > 0.
Repetindo este argumento
concluiremos que para todo m ≤ k inteiro, existe cone mínimo C em Rn−m tal que
Hk−m (∂C−∂∗ C) > 0. Agora, pela observação (8.2), cones mínimos em R8 tem no máximo
um ponto singular, donde, para todo m inteiro tal que k − m > 0, vale n − m > 8. Logo
k ≤ n − 8.
O cone de Simon fornece um contra-exemplo à regularidade interior de hipersuperfícies
mínimas. No entanto, a situação é bem diferente na fronteira. Na verdade, Hardt e Simon
[104] provaram, no âmbito da teoria das correntes integrais que se a variedade fronteira
M for de classe C1,α , então a solução do problema de Plateau também será de classe C1,α
em uma vizinhança de M.
Também no âmbito das correntes integrais Almgren em [46] mostrou que para
codimensão maior que 2 se tem
Hdim (Conjunto singular de T ) ≤ n − 2
onde T é uma corrente n−dimensional em Rn+k
A seguir estão dois exemplos com relação aos casos k = 1 e k > 1 respectivamente
Exemplo 8.1. T = {(x, y) ∈ R4 × R4 ; |x| = |y| ≤ 1}, com n = 7, k = 1 e ∂T = S3 × S3
Exemplo 8.2. T = {(z, w) ∈ C2 = R4 ; z2 = w3 , |z|2 + |w|2 ≤ 1}, com n = 2 e k = 2
8.5 Regularidade C1,α para hipersuperfícies Minimas
Poderemos enfim nesta seção resumir os resultados obtidos nos capítulos e seções
anteriores obtidos pelos matemáticos Ennio De Giorgi, Herbert Federer, Mario Miranda
e Umberto Massari a fim de podermos enunciar um Teorema que trata de regularidade e
singularidade de hipersuperfícies mínimas.
8.5.1 O Teorema de De Giorgi-Federer-Massari-Miranda
Sejam Ω ⊂ Rn aberto, ∂Ω Lipschitz, Γ ⊂ ∂Ω um subconjunto boreliano e A ∈ L1 (Ω).
Definamos: Z
F(E) =
Ω
A(x)χE (x)dx + |DχE |(Ω) +
Z
|χE − χΓ |dHn−1 e seja B = B(Ω) a classe
∂Ω
de subconjuntos de Borel de Ω. Quando |DχE |(Ω) < ∞ então χE tem um traço em
∂Ω pertencendo a L1loc (∂Ω) A função A chama-se curvatura média generalizada do
conjunto E.
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
161
Teorema 8.5.1. Para qualquer escolha de Ω, Γ, A existe E0 ∈ B(Ω) tal que
F(E0 ) = inf F(B) = inf F(E)
E∈B(Ω)
Proof: Veja Measure Theory and the Calculus of Variations [28].
Teorema 8.5.2. (De Giorgi-Federer-Massari-Miranda) Sejam Ω, Γ, A verificando
as hipóteses acima, e, além disso suponha |A(x)| ≤ A0 < ∞, ∀x ∈ Ω, |DϕE0 |(Ω) < ∞, e
satisfazendo para α ∈ (0, 1);
ψ(E0 , B(x, ρ)) ≤ cρn−1+2α
(8.27)
para todo x ∈ Ω e todo ρ ∈ (0, R), com c e R constantes positivas. Então existe Ω0 ⊂ Ω
tal que
i. ∂E0 ∩ Ω0 é uma variedade (n − 1)−dimensional de classe C1,α (para algum 0 < α <
1);
ii. Hs (Ω − Ω0 ) = 0, ∀s > n − 8 (para n ≤ 7, Ω − Ω0 = ∅);
iii. Assumindo que (8.27) se verifica uniformente para qualquer Eh , com {Eh } localmente
convergente em Ω para algum conjunto limite E∞ , temos que se xh ∈ ∂Eh para todo
h, com {xh } convergindo para algum ponto x∞ ∈ Ω; enquanto se x∞ ∈ ∂∗ E∞ , então
existe um h tal que xh ∈ ∂∗ Eh para todo h ≥ h e o vetor normal unitário exterior a
∂Eh em xh converge para o vetor normal unitário exterior a ∂E∞ em x∞ .
Nossos esforços no decorrer desse trabalho se concentraram exclusivamente em não
supor nada a respeito da curvatura do conjunto E em questão, dessa forma segundo os
estudos de Ennio De Giorge, onde o mesmo trabalho nas condições de A ≡ 0, juntamente
com Γ = ∂Ω teremos assim que E seria um conjunto de Caccioppoli, além do mais, o
mesmo segundo o Teorema (8.5.1) seria um conjunto minimal. Portanto segundo a teoria
dos Perímetros de Ennio De Giorge o Teorema acima se reescreveria da seguinte forma:
Teorema 8.5.3. Sejam Ω ⊂ Rn aberto e E ⊂ Rn um conjunto minimal. Então a fronteira
reduzida ∂∗ E é
i. uma variedade (n − 1)−dimensiomnal analítica de classe C1,α ;
ii. Hs ((∂E − ∂∗ E) ∩ Ω) = 0, se s > n − 8 ((∂E − ∂∗ E) ∩ Ω = ∅ se < 7).
iii. Assumindo que (8.27) se verifica uniformente para qualquer Eh , com {Eh } localmente
convergente em Ω para algum conjunto limite E∞ , temos que se xh ∈ ∂Eh para todo
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
162
h, com {xh } convergindo para algum ponto x∞ ∈ Ω; enquanto se x∞ ∈ ∂∗ E∞ , então
existe um h tal que xh ∈ ∂∗ Eh para todo h ≥ h e o vetor normal unitário exterior a
∂Eh em xh converge para o vetor normal unitário exterior a ∂E∞ em x∞ .
Teorema 8.5.4. Sejam Ω ⊂ Rn um conjunto aberto e E um conjunto de perímetro finito
em Ω com curvatura média generalizada em Lp (Ω), 0 ∈ Ω ∩ ∂E.
i. (Teorema de Regularidade Fraca) Seja p ≥ n; então para toda sequência {λk } de
números positivos λ → ∞ existe uma subsequência µk → ∞ e um conjunto minimal
E∞ ⊂ Rn dependendo da sequência {λk } tal que λk E → E∞ em L1loc (Rn ). Para a
dendidade de E em 0 temos 0 < Θn (E, 0) < 1. No caso de n ≤ 7 os conjuntos E∞
são semi-espços e Θn (E, 0) = 12 . Para n ≥ 8 isso não é mais verdade, por exemplo,
para o cone mínimo
F = {x ∈ R8 ; 4(x21 + x22 + x23 ) > x24 + x25 + x26 + x27 + x28 }
com um simples cálculo mostra-se que Θ8 (F; 0)
4
π
=
13
375
+ 12 arctan 2
0, 748971736....
=
ii. (Teorema de Regularidade Forte) Seja p > n; neste caso a fronteira reduzida Ω∩∂∗ E
p−n
4p
é uma variedade (n − 1)−dimensional de classe C1,α , α ≥
e
Hs ((∂E − ∂∗ E) ∩ Ω) = 0, se s > n − 8
8.5.2 Os casos p < n e p = n na análise dos teoremas de
regularidade
Esta subseção é dedica a análise via exemplos ilustrativos do caso em que o Teorema
de regularidade não é válido, ou seja, nos casos de p ≤ n.
O CASO p<n
Vejamos através de alguns exemplos que o teorema de regularidade falha.
Exemplo 8.3. Sejam α > 0, S = {(x, y) ∈ R2 ; 0 ≤ x ≤ 1, |y| ≤ xα }, B o disco tangente a
|y| = xα nos pontos (1, 1), (1, −1) e E = S ∪ B.. Com um simples cálculo temos que
0<α≤
1
2
1
2
⇒ HE ∈ L∞ (E);
< α ≤ 1 ⇒ HE ∈ Lp (E) se e somente se p >
α > 1 ⇒ HE ∈ L∞ (E) se e somente se p <
3α−1
;
2α−1
α+1
.
α
Exemplo 8.4. Para o conjunto E ⊂ Rn construído no exemplo (8.3) mas agora com a
−1
função e x2 no lugar de xα se vê mediante um cálculo simples que HE ∈
/ Lp (E) ∀ p > 1
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
163
Exemplo 8.5. Seja {ak } uma sequência de números positivos decrescentes a zero e
considere a função “dente de serra” f : [−a1 , a1 ] → R definida por f(0) = 0, f(−x) = f(x)
e
f(x) =
x − ak+1 na primeira metade do intervalo [ak+1 , ak ]
ak − x
na segunda metade
Seja E = {(x, y) ∈ R2 ; −a1 ≤ x ≤ a1 , −1 ≤ y ≤ f(x)}.
Sejam ck o ponto médio de [ak+1 , ak ], hk = f(ck ) e Tk o triângulo com vértices nos
√
pontos (ak+1 , 0), (ck , hk ), (ak , 0) e seja Bk o disco com raio rk = 2hk centrado em
(ck , −hk ). Temos |Tk − Bk | = 2 − π2 h2k e não é difícil notar que
√
HE (x, y) ≤ − r2k = − hk2 para (x, y) ∈ Tk − Bk
Portanto
Z
E
|HE (x, y)|p dxdy ≥ 2
X
k
! √ "p
X 2−p
2
|Tk − Bk | = constante.
hk .
hk
k
Ao escolhermos a sequência {ak } de tal sorte que hk =
1
k(log k)2
que HE ∈
/ Lp (E) ∀ p > 1.
para k ≥ 2, concluiremos
Este exemplo mostra que mesmo para um conjunto com boas propriedades de
/ Lp (E) ∀ p > 1.
regularidade (observe que ∂E é Lipschitz contínua) é possível HE ∈
O CASO LIMITE p=n
A validade ou não do Teorema de Regularidade Forte para o caso p = n foi uma
questão nada palpável nos últimos anos da década de 80. Apresentaremos aqui um simples
porém elegante exemplo a esta questão. O exemplo fora sugerido por E. De Giorgi durante
uma Coferência que se realizara em Trento em julho de 1992.
No que se segue será utilizado o seguinte resultado bem conhecido:
Proposição 8.3. Sejam Ω ⊂ Rn um conjunto aberto e E um conjunto de perímetro finito
em Ω, suponha que ∂E = Z∪Γ , onde Z é um subconjunto fechado de ∂E com Hn−1 (Z) = 0
e Γ é uma variedade C1 (n − 1)−dimensional. Suponha que o vetor unitário exterior
ν : Γ → Rn possa ser extendido a um campo vetorial V : Ω → Rn , V ∈ W 1,1 (Ω) ∩ L∞ (Ω).
A função H(x) = −divV(x) pertence a H1 (Reveja capítulo 2 § 2.6)
Proof: Veja Gonzalez-Massari [70] pag. 26
Exemplo 8.6. (Um conjunto singular em R2 com curvatura em L2 ) Consideremos
as seguintes “espirais antípodas” no plano-(x, y):
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
164
Γ (t) = x(t) + iy(t) = teiθ(t) e e
Γ (t) = e
x(t) + ie
y(t) = tei(θ(t)+π)
onde θ(t) = log(1 − log(t)), 0 < t < 1.
Claramente
Γ (t) = −e
Γ (t), ||Γ (t)|| = t ∀ t ∈ (0, 1) e lim Γ (t) = (1, 0), lim Γ (t) = (0, 0).
t→1
t→0
Denotando de E = {tei(θ(t)+α) ; 0 < t < 1, π < α < 2π} o subconjunto de B1 = B1 (0, 0)
situado entre as duas espirais Γ, e
Γ . Claramente {(0, 0)} = B1 ∩ (∂E − ∂∗ E), a origem sendo
o único ponto singular de B1 ∩ ∂E.
Observe que, para todo ρ ∈ (0, 1), o círculo x2 + y2 = ρ2 tem exatamente dois pontos
situados em ∂E, a saber Γ (ρ) e e
Γ (ρ) = −Γ (ρ). Além disso, os vetores normais exteriores
a ∂E em Γ (ρ) e e
Γ (ρ) coincidem; podemos dessa forma extender ν : Γ ∪ e
Γ → S1 a um campo
vetorial V : B1 − (0, 0) → S1 pelo requerimento óbvio
V(x, y) = ν(x(ρ), y(ρ)), x2 + y2 = ρ2
Agora é uma tarefa simples (Veja Gonzalez-Massari-Tamanini [110]) mostrar que
divV ∈ L2 (B1 ). Além disso, da Proposição (8.3) segue que H(x, y) = −divV(x, y) é
uma curvatura para E em B1 .
8.5.3 Comentários Finais
Como fora inserido acima, todos os resultados referentes a regularidade C1,α e
estimativa do conjunto singular podem ser obtidos sob as hipóteses do conjunto de
Caccioppoli E ter curvatura média A(x) generalizada limitada em Lploc (Ω) ou mesmo
em Rn , tais hipóteses são tratadas por Massari em [57], [68], [70] e [75]. Trabalhos
na linha de regularidade C1,α de fronteira reduzida minimal com obstáculo também
foram desenvolvidos com sucesso por Barozzi-Massari [73] como também a estimativa do
conjunto singular. Gonzalez-Massari-Tamanini [84] provaram resultados de regularidade
(analiticidade) de fronteiras mínimas e estimativa do conjunto singular nas hipóteses da
mesma ter um volume prescrito.
Ressaltamos que os resultados aqui expostos fazem referência ao que coloquialmente
se concebe como Geometria Diferencial fraca, pois não dispomos de resultados vinculados
a classe de diferenciabilidade dos objetos em questão por exemplo. Salientamos que
toda teoria de Superfícies mínimas segundo os contextos de Geometria Diferencial pode
ser levada, no caso adaptada, e construída, no novo contexto de Teoria Geométrica da
Medida, como fora construído nesse texto a recíproca é verdadeira, toda superfície mínima
em Teoria Geométrica da Medida será uma superfície mínima segundo o contexto e a
CAPÍTULO 8. REGULARIDADE DE SUPERFÍCIES MÍNIMAS
concepção de Geometria Diferencial.
Vejamos alguns exemplos clássicos de superfícies mínimas nas figuras abaixo.
Figura 8.2: Superfície Mínima de Celso José da Costa.
Figura 8.3: Superfície Mínima 3−nóide de Jorge-Meeks.
165
Capítulo
9
Teoria de De Giorgi-Nash-Moser
Conteúdo
9.1
9.2
De Giorgi e o 19o problema de Hilbert . . . . . . . . . . . . . . . . . . . . . . 166
. . . . . . . . . . . . . . . . . . . . . . . . 168
9.1.1
Subsoluções são limitadas
9.1.2
O Lema de Oscilação de De Giorgi . . . . . . . . . . . . . . . . . . . . 171
A equivalência entre as Teorias de De Giorgi e Nash-Moser . . . . . . . . . . . 175
9.2.1
A Desigualdade de Harnack e o Teorema de De Giorgi-Nash-Moser . . . 175
9.3
Uma aplicação geométrica do Teorema de De Giorgi-Nash-Moser . . . . . . . . 176
9.4
Regularidade básica das soluções de divA(x, Du) = 0 em Ω . . . . . . . . . . . 177
N
este capítulo desenvolveremos a Teoria de Regularidade de De Giorgi-Nash-Moser: a
mesma trata da regularidade de soluções de equações diferenciais parciais elípticas de
segunda ordem da forma divergente, nesse contexto não se exige regularidade alguma dos
coeficientes, somente que os mesmos sejam limitados, mensuráveis e elípticos. Chegaremos
a conclusão que tais soluções são Hölder contínuas.
9.1 De Giorgi e o 19o problema de Hilbert
O 19o problema de Hilbert faz o seguinte questionamento: As soluções das lagrangianas
são sempre analíticas?
E(u) =
Z
Ω
F(Du)dx → min.
(9.1)
Em Cálculo das Variações se estuda o problema geral de minimização do funcional
acima, onde F é exigido ser uma função convexa. Fixado um valor de fronteira, digamos
u = f em ∂Ω, a existência de um mínimo para E em um espaçoo de Sobolev adequado,
W 1,p (Ω) é uma simples consequência de reflexividade do espaço de Sobolev em questão e
a semi-continuidade inferior fraca do funcional.
166
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
167
Analizemos agora o 19o problema de Hilbert a luz de técnicas de EDPs. Uma vez
encontrado um mínimo, u para (9.1), dado qualquer função suave ϕ com suporte em Ω
e qualquer t ∈ R, a função ut := u + tϕ “compete” com u no problema de minimização
(9.1). Assim, a função de variável real e(t) := E(u + tϕ) tem t = 0 como ponto de
mínimo. Se diferenciarmos e com respeito a t, obteremos a seguinte relação:
Z
DϕFj (Du)dx = 0
Ω
Ao integrarmos por partes obteremos a seguinte equação de Euler-Lagrange
(não-linear)
div(fj (Du)) = 0
(9.2)
Diferenciando (9.2) obteremos
X
Fij (Du)Dij = 0
(9.3)
i,j
A convexidade do potencial F garante a elipticidade da matriz Fij . Porém , tendo u
apenas derivadas fracas, de forma independente a suavidade de F, os coeficientes da matriz
são somente mensuráveis.
Se conseguíssemos inferir regularidade Hölder contínua de Du então a teoria clássica
de Schauder aplicada a (9.3) nos forneceria regularidade C2,α para u. Portanto, F(Du)
seria C1,α e novamente via a teoria de Schauder, esta nos forneceria que u é C3,α . Se
continuarmos com tal argumento de bootstrap, concluiremos que u é de classe C∞ . Dessa
forma se F fosse analítica e sendo u de classe C∞ , sua analiticidade seria obtida por
argumentos padrões. Mediante a análise acima fica claro que para inferirmos regularidade
alta de u devemos de fato analisar a regularidade da primeira derivada de u. Portanto,
fixada uma direção µ é de bom tom estudarmos a equação diferencial parcial que uµ
satisfaz. Para tanto, diferenciemos (9.2) na direção µ e vejamos que
div(Fij (Du)Duµ ) = 0
(9.4)
a primeira derivada de u satisfaz uma equação elíptica com coeficientes a princípio somente
mensuráveis e limitados.
Ennio De Giorgi produzira uma esplêndida demonstração para o 19o problema
de Hilbert baseado em um Teorema que atualmente é conhecido como Teorema de
regularidade de De Giorgi, o qual nos fornece Hölder continuidade de soluções de EDPs
elípticas de segunda ordem da forma divergente, diferentemente a Teoria de Shauder, sem
se assumir como hipótese a suavidade dos coeficientes. Nosso objetivo será estabelecer
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
168
Hölder continuidade para as soluções de div(Fij (Du)Duµ ) = 0 quando os Fij são a
princípio somente mensuráveis e limitados.
Tais resultados serão obtidos mediante o
Teorema 9.1.1. (De Giorgi) Seja aij uma matriz uniformente elíptica, isto é, existem
constantes 0 < λ ≤ Λ < ∞ tais que λI ≤ aij (X) ≤ ΛI, e u uma solução no sentido das
distribuições de
(9.5)
div(aij (X)Du) = 0 em B1
então, existe um expoente universal 0 < α < 1 tal que u é α−Hölder contínua em B 1 .Além
2
disso,
|u|Cα (B 1 ) ≤ C|u|L2 (B1 ) ,
2
onde C é universal, isto é, depende apenas da dimensão e elipticidade.
A demonstração do Teorema de regularidade de De Giorgi será dividida em duas fases:
na primeira fase nos trabalharemos na limitação pontual da solução por sua norma L2 ,
e, finalmente demonstração de um lema de decaimento de oscilação também devido a De
Giorgi.
9.1.1 Subsoluções são limitadas
O primeiro passo para a demonstração do Teorema de regularidade de De Giorgi será a
análise do Lema L2 ⇒ L∞ , o qual fornece controle pontual de uma subsolução em termos
de sua norma L2 .
Lema 9.1. (L2 ⇒ L∞ ). Seja u uma solução de (9.5), isto é,
div(aij (X)Du) ≥ 0
no sentido das distribuições. Existe um δ > 0, universal tal que
||u+ ||L2 (B1 ) ≤ δ implica ||u+ ||L∞ (B 1 ) ≤ 1
2
De maneira direta podemos constatar via um argumento de renormalização que o
Lema (9.1) fornece a estimativa
||u+ ||L∞ (B 1 ) ≤ δ−1 ||u+ ||L2 (B1 ) .
2
A demonstração deste lema é obtida como consequência da competição entre duas
desigualdades: a desigualdade de Sobolev( satisfeita para qualquer função f ∈ H10 , veja
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
169
por exemplo Evans [2]) e uma estimativa de energia para subsoluções. Recorde por um
instante que a desigualdade de Sobolev assegura que dada f ∈ H10 (B1 ) então
||f||Lp (B1 ) ≤ C||∇f||L2 (B1 ) ,
com p =
2n
> 2.
n−2
Lema 9.2. (Estimativa de Energia para subsoluções). Seja v ≥ 0 uma subsolução
de (9.5), isto é, v satisfaz
div(aij (x)Dv) ≥ 0 em B1 ,
no sentido das distribuições. Então, para qualquer ψ ∈ C∞
0 (B1 ), temos
Z
que
2
B1
|D(ψv)| dx ≤ C sup |∇ψ|
2
Z
(9.6)
(v)2 dx.
B1
2
Proof: Fixado ψ ∈ C∞
0 (B1 ), ao utilizarmos ψ v como função teste poderemos inferir
Z
B1
(ψ2 v)div(aij (x)Dv)dx ≥ 0.
Ao fazermos a integraçãom por partes da sentença acima a mesma nos fornecerá
Z
B1
(9.7)
D(ψ2 v).(aij (x)Dv)dx ≤ 0,
como também tem-se
Z
2
B1
ψ v.aij (x)Dvdx ≤
Z
(9.8)
2|ψvDψ.aij (x)Dv|dx.
B1
Se λ ≤ Λ forem as constantes de elipticidade de aij então
Z
Λ
ψ |Dv| dx ≤
λ
B1
2
2
Z
Λ
2|vDψ|.|ψDv|dx ≤
λ
B1
sup |Dψ|2
ǫ
Z
2
B1 v dx + ǫ
Z
2
2
ψ |Dv| dx
B1
Dessa forma, se escolhermos ǫ suficientemente pequeno, poderar-se-á absorver o
segundo termo do lado direito da equação e encontrar que
Z
2
B1
2
ψ |Dv| dx ≤ C sup |Dψ|
2
Z
v2 dx
B1
Para finalizarmos a prova deste Lema basta observarmos que
|D(ψv)|2 ≤ 2(|Dψ|2 v2 + ψ2 |Dv|2 ),
(9.9)
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
170
e isso conclui a prova do Lema (9.2).
Iremos agora a demonstração do Lema (9.1), onde a mesma se fará segundo a
confrontação de duas desigualdades que competem com “homogeneidades” diferentes. De
fato, a estimativa de energia, Lema (9.2), é uma relação de ordem “2 ⇔ 2”, enquanto que
a desigualdade de Sobolev fornece uma relação da forma “2 ⇔ p”, para p > 2.
Proof:(Lema 9.1) A prova consiste primeiramente em construir uma família de
funções corte radiais que convergem para a função característica da bola de raio
ψk (x) =
1, em B 1 −k
+2
1
2
:
(9.10)
2
0, em B1 − B 1 −(k−1)
+2
2
De fato é possível escolher ψ de sorte que |Dψk | ∼ 2k em B 1 +2−(k−1) − B 1 +2−k .
2
2
Além disso, observe que por construção temos ψk−1 ≡ 1 em spt(ψk ).
Agora ao aplicarmos o Lema (9.2) com ψ = ψk e substituindo v por
uk = (u − [1 − 2−k ])+ ,
onde é de fácil verificação que a mesma ainda é uma subsolução.
A estratégia será verificarmos que ao se chegar em B 1 via os anéis diádicos, uk irá se
2
anular. Matematicamente mostraremos que uk → 0 em L2 , e portanto u+ ≤ 1 em B 1 .
2
Para tanto iremos aplicar a desigualdade de Sobolev e enfim concluir que
C
Z
2
B1
|D(ψk uk ) |dx ≥
A desigualdade de Hölder fornece que
Z
2
B1
Z
|ψk uk | dx ≤ |{ψk uk > 0}|
p
|ψk uk | dx
B1
µ
Z
p2
p
|ψk uk | dx
B1
(9.11)
p2
,
(9.12)
para algum expoente µ > 0 explicitamente calculável, se assim o for desejado. Ao
combinarmos (9.11) e (9.12) teremos
Z
2
B1
|ψk uk | dx ≤ C|{ψk uk > 0}|
µ
Z
|D(ψk uk )|2 dx
(9.13)
B1
Agora denotemos Ak := ||ψk uk ||2L2 . Ao inserirmos agora a estimativa fornecida pelo
Lema (9.2) na desigualdade (9.13) e salientando que ψk−1 ≡ 1 em spt(ψk ) e que uk ≤ uk−1
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
171
a fim de obtermos o seguinte controle
2k
Ak ≤ 2 C|{ψk uk > 0}|
µ
Z
(ψk−1 uk−1 )2 dx
(9.14)
B1
Tendo em vista a definição da sequência uk , teremos que
{x ∈ B1 ; uk−1 (x) > 2−k } ⊂ {x ∈ B1 ; uk (x) > 0}
Como ψk > 0 implica ψk−1 ≡ 1, temos {ψk uk > 0} ⊂ {ψk−1 uk−1 > 2−k }
A desigualdade de Chebyshev assegura que
−k
|{ψk uk > 0}| ≤ |{ψk−1 uk−1 > 2 }| ≤ 2
2k
Z
(ψk−1 uk−1 )2 dx.
(9.15)
B1
Finalmente ao combinarmos (9.14) e (9.15) obteremos a relação recursiva não linear
Ak ≤ C[22k Ak−1 ]µ+1
(9.16)
Observamos que não é de difícil verificação que mediante (9.16) se A0 é suficientemente
pequeno, então Ak → 0 quando k → 0 e desse modo o Lema (9.1) está demonstrado
9.1.2 O Lema de Oscilação de De Gorgi
Neste tópico iremos demostrar o decaimento geométrico da oscilação de uma solução
da equação (9.5), da qual implica em Hölder continuidade na origem. Lembremos que a
noção de oscilação é definida por
oscΩ f := sup f − inf f
Ω
Ω
A ideia geométrica da prova será a seguinte: seja u uma solução de (9.5) entre,
digamos −1 e 1. Devido ao Lema de energia, u+ tem norma H1 controlada universalmente.
Cortamos o gráfico de u ao nível 12 , isto é, definimos v1 := min{u+ ; 12 }. Como a norma H1
mensura em termos integrais a magnitude do gradiente de uma função, é esperado que u+
requera espaço para ir do conjunto onde ele se anula para o conjunto {u+ = 12 } = {v1 = 0}.
Assim Ln (v1 = 0) é uma proporção fixa maior do que Ln (u+ = 0). Olhamos agora para
a parte de cima do truncamento, ou seja, v2 = max{ 12 , u+}. Renormalizamos a figura
para a bola unitária e aplicamos novamente o argumento acima. Repetimos o processo
indutivamente. Como a cada passo ganhamos uma proporção fixa no volume onde a
função se anula, em um número finito de passos a sequência de funções contruídas terá
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
172
norma L2 tão pequena quanto desejarmos. O Lema (9.1) garante então que para algum k0
universal, uk0 −1 ≤
1
2
em B 1 , o que, em termos da função original, implica u+ ≤ 1 − 2−k0 ,
2
com k0 universal. Ou seja,
oscB 1 u ≤ 2 − 2−k0 = 2θ,
2
com θ < 1 universal.
Lema 9.3. (Lema de oscilação de De Giorgi). Seja u uma solução fraca de (9.5)
em B1 . Assuma que oscB1 u = 2. Então
oscB 1 ≤ 2θ,
2
para algum θ < 1 que depende exclusivamente da dimensão e das constantes de elipticidade
de aij .
Proof: A demostração deste Lema é bastante geométrica e intuitiva. Inicialmente
adicionando uma constante se necessário, podemos assumir que
−1 ≤ u(x) ≤ 1 em B1 .
Seja δ como no Lema (9.1). Observe primeiramente que se u+ quando restrito digamos
à B 3 for pequeno, ou seja, se
4
δ
||u+ ||L2 (B 3 ) < ,
2
4
então o Lema (9.1) nos garanteria que u+ <
1
2
em B 1 e assim
2
3
oscB 1 ≤ ,
2
2
e a prova do Lema estaria completa. Nossa estratégia será produzir esta exata situação
via um número finito (e sob controle universal) de escalonamentos e normalizações como
previsto inicialmente. Começamos com uma observação: em B 3 , ou u está pelo menos
4
em metade do volume de B 3 acima de zero ou pelo menos em metade do volume de B 3
4
4
abaixo de zero. Sem perda de generalidade, vamos assumir que u+ = 0 em pelo menos
metade de B 3 .
4
O controle qualitativo do espaço que uma função no H1 requer para ir de 0 a 1 é
consequência do seguinte importante Lema da teoria do potencial, também devido a De
Giorgi.
Lema 9.4. (Lema isoperimétrico de De Giorgi). Seja w uma função do H1 (B1 )
satisfazendo,
0≤w≤1 e
Z
B1
|Dw|2 dx ≤ 1
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
173
. Se denotarmos A := {w = 0}, C := {w = 1} e D := {0 < w < 1}, teremos
1
[Ln (D)] 2 ≥ cn Ln (A).[Ln (C)]
n−1
n
,
onde cn é uma constante dimensional.
Proof: Seja x0 um ponto genérico em C. Para cada vetor unitário σ tal que x0 + tσ
intersecta A, digamos em y = x0 + lσ escrevemos
1 = u(x0 ) = −
Zl
(9.17)
Dr u(x0 + rσ)dr
0
Seja U ⊂ Sn−1 o conjunto de todos estes vetores unitários, isto é,
U := {σ ∈ Sn−1 ; a linha x0 + tσ intersecta A}
Ao utilizarmos coordenadas polares e posteriormente retornando às coordenadas
cartesianas, obteremos, ao integrar (9.17) em U, a seguinte estimativa
H
n−1
(U) ≤
Z
Z hy−x0 ,σi
σ∈U 0
Dr u(x0 + rσ)drdσ ≤
Z
D
|∇u(y)(y − x0 )|
dy ≤
|y − x0 |n−1
Z
D
|∇u(y)|
dy.
|y − x0 |n−1
(9.18)
Considerações geométricas elementares comparando o volume do cone que contem
A e a área da casca esférica delimitada por ele, U, mostra que existe uma constante
dimensional cn > 0, tal que
(9.19)
Ln (A) ≤ cn Hn−1 (U)
Integramos agora (9.18) sobre C, levando em consideração (9.19) e concluímos
n
n
L (C).L (A) ≤ cn
Observamos agora que a função
Z
|∇u(y)|
D
x0 7→
1
|y−x0 |
Z
C
dx0
|y − x0 |n−1
dy
(9.20)
n−1
é radial e decrescente. Portanto, dentre todos os conjuntos com volume, Ln (C), sua
1
n
n
integral será maximizada quando C for a bola centrada em x0 e raio r0 = [w−1
n L (C)] .
Assim, se voltarmos à desigualdade (9.20), podemos estimar, com o uso da desigualdade
de Hölder, e do controle ||∇u||L2 ≤ 1,
Ln (C).Ln (A) ≤
cn
1
n
1
1
[Ln (D)] 2 [Ln (C)] 2
wn
o que finalmente fornece a estimativa por baixo desejada para Ln (D)
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
174
Continuamos com a prova do Lema de oscilação. Iniciamos nosso processo com u0 =
u . Como já concordado, podemos assumir
+
1
Ln ({u0 = 0} ∩ B 3 ) =: Ln (A0 ) ≥ Ln (B 3 ).
4
4
2
+
Definimos então u1 := 2 u0 − 12 , A1 := {u1 = 0} = u0 ≤ 12 e indutivamente
−k
k
+
uk := 2 (u0 − (1 − 2 )) , Ak := {uk = 0} =
1
u0 ≤ 1 − k
2
Observamos que cada função uk é uma subsolução da equação (9.5) e que uk (x) ≤ 1.
A estimativa da energia, Lema (9.2), fornece controle universal à norma H1 de uk em B 3 .
4
Observamos ainda que
Ak+1 =
1
uk ≤
2
.
O Lema isoperimétrico, isto é, Lema (9.4), garante que em cada passo adicionamos uma
proporção fixa ao volume do conjunto Ak . Assim em um número finito de passos, recaimos
na situação ||uk ||L2 (B 3 ) ≤ δ2 , onde
4
δ
2
é o número do Lema (9.2) e a prova está concluída.
Para verificarmos analiticamente esta última asserção, argumentamos da seguinte forma:
Lema (9.4) fornece a seguinte estimativa recursiva
1
1 n−1
[Ln (Ak+1 )] 2 ≥ cn Ln (Ak ).Ln ({uk ≥ }) n
2
(9.21)
Para efeito de simplificação de notação, denotaremos
1 n−1
cn Ln ({uk ≥ }) n =: γk
2
Aplicando (9.21), sucessivamente, encontramos
k
[Ln (Ak+1 )] ≥ γekk [Ln (A0 )]2 ,
onde ek = 1 + 2ek−1 , e1 = 1; ou seja, ek = 2k−1 + 2k−2 − 1 ≪ 2k . Como
1
Ln (A0 ≥ [Ln (B 3 )],
4
2
concluímos que em um número finito (e universal) de passos, digamos, após k0 iterações,
L
n
uk 0
1
≥
2
δ
≤ .
2
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
175
Mas assim, ||uk0 +1 ||L2 (B 3 ) ≤ δ2 ,
4
e finalmente isto implica, em termos do Lema (9.2), que
uk0 +1 ≤
1
⇔ u0 ≤ 1 − 2−k0 , em B 1
2
2
e isso finaliza a demonstração do Lema.
9.2 A equivalência entre as Teorias de De Giorgi e
Nash-Moser
Resaltamos que subsequentemente aos trabalhos de De Giorgi, Moser e Nash em
trabalhos independentes conseguiram estabelecer Desigualdade de Harnack para as
soluções de (9.5), a qual implica em Hölder continuidade das soluções. Atualmente,
se concebe que se pode adequar a estratégia de De Girogi a fim de obter uma nova
demonstação da Desigualdade de Harnack. Portanto as teorias de De Giorgi e Nash-Moser
são dessa forma equivalentes.
9.2.1 A
Desigualdade
de
Harnack
e
o
Teorema
de
De
Giorgi-Nash-Moser
1,2
Teorema 9.2.1. (Desigualdade de Harnack) Seja u ∈ Wloc
uma solução fraca positiva
da equação
Di (aij Dl u) = 0
(9.22)
em uma bola BR com coeficientes aij mensuráveis e limitados satisfazendo a desigualdade
aij ξi ξj ≥ ν|ξ2 |, ν > 0
(9.23)
Então para todo α < 1 existe uma constante c dependendo de α, mas não de u, tal que:
sup u ≤ c(α) inf u
BαR
BαR
(9.24)
Proof: Veja Gilbarg-Trudinger [105] pag. 199.
Como uma consequência da Desigualdade de Harnack, como já fora argumentado
acima, poderemos provar o Teorema de De Giorgi-Nash-Moser
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
176
Teorema 9.2.2. (De Giorgi-Nash-Moser) Seja u uma solução da equação (9.22) com
condições (9.23). Então u é Hölder contínua em Ω.
Proof: Sejam x0 ∈ Ω e BR (x0 ) ⊂⊂ Ω. Para r < R tomemos:
M(r) = sup u
m(r) = inf u
BR (x0 )
As funções v(x) = u(x) − m(r)
em BR (x0 ). De (9.24) com α =
r
w(r) = M(r) − m(r)
BR (x0 )
w(x) = M(r) − u(x) são soluções positivas de (9.22)
1
2
teremos dessa forma
i
r
M
− m(r) ≤ c m( ) − m(r)
2
2
r
r i
M(r) − m
≤ c[M(r) − M )
2
2
h
Ao adicionarmos estas duas desigualdades obteremos
w(r) + w
r
w
r
e consequentemente
h
r i
≤ c w(r) − w
2
2
2
≤
c−1
w(r)
c+1
c−1
teremos via indução que w(2−k R) ≤ θk w(R) e segue por w ser
c+1
uma função não-decrescente que
. Ao tomarmos θ =
−1
w(r) ≤ θ
r −logθ
log2
R
Tal desigualdade implica que u ∈ C0,γ , com γ = −
w(R)
logθ
log2
9.3 Uma Aplicação geométrica do Teorema de De
Giorgi-Nash-Moser
Uma das mais importantes e conhecidas aplicações do Teorema de regularidade de De
Giorgi-Nash-Moser confere diferenciabilidade de superfícies mínimas. De fato, o Teorema
(9.2.2) informa que uma superfície minima Lipschitz S é localmente C1,α . Vejamos uma
demosntração de tal afirmativa: Com efeito, se uma superfície mínima S puder ser escrita
(localmente) como o gráfico de uma função Lipschitz f, os seja, S ∩ Bρ = (x, f(x)), então
para quase todo x ∈ Bρ tem-se que
div
!
∇f
1
(1 + |∇f|2 ) 2
"
=0
(9.25)
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
177
Além disso, ao fixarmos uma direção µ e difinirmos ν = Dµ f, é de fácil constatação
através de (9.25) que ν satisfará div(aij Dν) = 0 onde aij é uma matriz elíptica mensurável
e limitada. Assim o Teorema de De Giorgi-Nash-Moser (9.2.2) fornece que ν é Hölder
contínuo. Em outras palavras, f é C1,α .
Observação 9.1. Em particular, vimos que dado um conjunto de Caccioppoli E se ν(x)
não varia muito então o conjunto E tem fronteira localmente Lipschitz, ou seja,
∂E ∩ Ω = {(y, t); y ∈ A, t = f(y)},
onde A ⊆ Rn−1 é um conjunto aberto e f : A → R uma função Lipschitz. Além disso, se
tivermos x ∈ ∂E satisfazendo (CDG), ou seja, as condições do Lema de Decaimento de De
Giorge então x ∈ ∂∗ E. Mediante a junção das duas alíneas acima podemos argumentar
que localmente a fronteira reduzida de um conjunto minimal é localmente o gráfico de
uma função Lipschitziana, logo satisfaz a equação das superfícies mínimas, pelo Teorema
de De Giorgi-Nash-Moser (9.2.2) isso nos fornece que a mesma é Hölder contínua, C0,α ,
para algum 0 < α < 1. Mas,isso fornece, novamente, via Teoria de Equações Diferenciais
Parciais Elípticas que a fronteira reduzida ∂∗ E é uma hipersuperfície de classe C0,α .
9.4 Regularidade básica das soluções de divA(x, Du) = 0
em Ω
Consideremos agora as soluções fracas da equação
divA(x, Du) = 0 em Ω;
(9.26)
1,2
a saber, funções u ∈ Wloc
tais que para toda ϕ ∈ C∞
0 (Ω):
Z
Ai (x, Du)Di ϕdx = 0.
(9.27)
O campo de vetores A(x, p) é suposto satisfazer as seguintes desigualdades:
|A(x, p)| ≤ c1 |p| + |f(x)|
2
λ|ξ| ≤
n
X
∂Ai
i,j=1
∂pi
ξi ξj ≤ Λ|ξ|2 ∀ξ ∈ Rn
(9.28)
(9.29)
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
178
com f ∈ L2loc (Ω) e λ, Λ > 0.
Em particular estaremos interessados no caso
A(p) = T (p) =
p
1
(1 + |p|2 ) 2
.
1,2
Teorema 9.4.1. Seja u ∈ Wloc
uma solução fraca da equação (9.27) e suponha que (9.28)
e (9.29) são satisfeitos, e além disso
∂Ai ∂xj (x, p) ≤ c1 |p| + |f(x)|.
(9.30)
2,2
Então u ∈ Wloc
e toda derivada w = Ds u satisfaz a equação
Z
onde aij (x) =
Ω
{aij (x)Dj w + bi (x)}Di ϕdx = 0, ∀ϕ ∈ C∞
0 (Ω).
(9.31)
∂Ai
∂Ai
(x, Du(x)) e bi (x) =
(x, Du(x)).
∂pj
∂xs
Proof : Veja Giusti [3] pag. 227.
Vejamos agora a equação não-homogênea
Z
{aij (x)Dj u − fi }Di ϕdx = 0 ϕ ∈ C∞
0 (Ω).
(9.32)
Nós investigaremos a regularidade das soluções nos espaços de Sobolev W m,2 e no
espaço de Hölder Cm,α .
1,2
Teorema 9.4.2. Seja u ∈ Wloc
uma solução da equação (9.32), com os coeficientes aij
satisfazendo as condições de elipticidade (9.23). Se os coeficientes aij são de classe Cm e
m+1,2
m,2
(Ω), então u ∈ Wloc
(Ω).
fi ∈ Wloc
Proof: Se m = 1 o resultado segue do Teorema (9.4.1). Procedemos agora via
argumento de indução.
aij ∈ C
m+1
, e fi ∈
Suponhamos que tal propriedade seja válida para m e seja
m+1,2
Wloc
.
m+1,2
A função u está em Wloc
(Ω), e sua derivada w = Ds u
satisfaz a equação (9.31) com
bi =
∂aij
∂fi
m,2
Dj u −
∈ Wloc
(Ω).
∂xs
∂xs
m+1,2
m+2,2
e dessa forma u ∈ Wloc
(Ω) finalizando
Portanto podemos concluir que w ∈ Wloc
assim a prova por indução.
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
179
1,2
Teorema 9.4.3. Seja u ∈ Wloc
(Ω) uma solução da equação (9.32) com condições
(9.23). Suponha que os coeficientes aij e as funções fi são de classe Cm,α (Ω). Então
u ∈ Cm+1,α (Ω).
Sketch Para o caso m = 0 o resultado é usualmente obtido por meio de uma
representação da solução. O caso geral concebese como acima via um argumento de
indução.
Observação 9.2. Uma demonstração diferenciada, com um método o qual tem sido
bastante utilizado em várias circunstâncias, é o devido a Campanato [80] e pode ser
encontrado em Giusti [81]. Em particular, se os coeficientes e as fi′ s são infinitamente
diferenciáveis, a solução u será de classe C∞
1,2
Teorema 9.4.4. Seja u ∈ Wloc
uma solução fraca da equação (9.26) com condições
(9.27) e (9.28) , e, com coeficientes independentes de x. Suponha que as funções Ai são
de classe Cm,α . Então u ∈ Cm+1,α .
Proof: Pelo Teorema (9.26) a função w = Ds u é uma solução da equação
Z
aij (x)Dj wDi ϕdx = 0∀ ϕ ∈ C∞
0 (Ω)
com
aij (x) =
∂Ai
(Du(x)).
∂pj
Pelo Teorema de De Giorgi-Nash-Moser (9.2.2), w é Hölder contínua com algum
expoente β e portanto u ∈ C1,β . Agora, seja m = 1, então temos aij ∈ C0,σ para algum σ >
0, e pelo teorema (9.4.3) u ∈ C2,σ (Ω). Mas, agora aij ∈ C0,α e novamente pelo Teorema
(9.4.3), u ∈ C2,α e o Teorema fica demonstrado para o caso m = 1. A demonstração será
via indução. Suponha agora que o resultaso seja válido para o caso geral, ou seja, m, e
seja Ai (p) ∈ Cm+1,α . A hipótese de indução nos fornece que u ∈ Cm+1,α (Ω) e dessa forma
aij ∈ Cm,α (Ω). Uma aplicação adicional do Teorema (9.4.3) fornece que w ∈ Cm+1,α e
portanto u ∈ Cm+2,α (Ω)
Observação 9.3. Em particular, via um argumento tipo bootstrap, se as funções Ai são
de classe C∞ , o mesmo será verdade para u. Mais ainda, se os coeficientes são (reais)
analíticos, a solução u será analítica, um resultado cuja prova pode ser encontrada em
Morrey [64].
CAPÍTULO 9. TEORIA DE DE GIORGI-NASH-MOSER
180
Observação 9.4. Em particular, segue do argumentado acima que a fornteira ∂E ∩
B(x, ρ), respectivamente, a fronteira reduzida ∂∗ E∩B(x, ρ), são hipersuperfícies analíticas,
pois localmente elas satisfazem as condições do Teorema (9.4.4) acima. Portanto isso
completa de fato a demonstração do Teorema (8.1.3).
Capítulo
10
Aplicação à Teoria de Variedades
Mínimas
Conteúdo
10.1 Teorema de Regularidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
10.2 Cones Mínimos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
10.3 Problema de Bernstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
10.1 Teorema de Regularidade
Definição 10.1. Um conjunto E ⊂ Rn tem fronteira mínima em Ω se
i. Per(E, Ω) < ∞
ii. Per(E, Ω) ≤ Per(F, Ω), qualquer que seja o conjunto mensurável F tal que (F − E) ∪
(E − F) é relativamente compacto em Ω
Observação 10.1. Se f ∈ C2 (B), onde B é um aberto de Rn e f é a solução da equação
das superfícies mínimas, isto é,
div
p
gradf
1 + |gradf|2
!
(x) = 0, ∀x ∈ B
então o conjunto E = {(x, t); x ∈ B, t < f(x)} ⊂ Rn × R tem fronteira mínima no aberto
Ω = B × R. Para a prova deste fato são necessários alguns cálculos e pode ser encontrada
em Miranda [56].
É de fácil concepção que se ∂E é minima em Ω e se Ω ∪ ∂E é o gráfico de uma
função, então esta função é solução da equação das superfícies mínimas. Poderemos então
181
CAPÍTULO 10. APLICAÇÃO À TEORIA DE VARIEDADES MÍNIMAS
182
considerar uma formulação generalizada do problema das superfícies mínimas (Problema
de Plateau):
PROBLEMA DE PLATEAU (para fronteiras) Seja E mensurável e Ω ⊂ Rn
aberto com Per(E, Ω) < ∞. Seja A aberto e relativamente compacto em Ω. Desejamos
encontrar M conjunto mensurável tal que
i. M − A = E − A
ii. Per(M, Ω) = Per(N, Ω) para todo N mensurável com N − A = M − A.
O Problema de Plateau para fronteiras tem a seguinte solução
Teorema 10.1.1. (Existência de fronteiras mínimas) Quaisquer que sejam E, Ω e
A existe M verificando (i) e (ii)
Como fora desenvolvido, a demonstração de tal resultados se concebe mediante
resultados de compacidade, segundo se encontra no capítulo 2 deste trabalho.
Ennio De Giorgi em 1960 provou a seguinte propriedade das fronteiras mínimas
Teorema 10.1.2. (De Giorgi) Se E tem fronteira mínima no aberto Ω ⊂ Rn então
i. ∂∗ E ∩ Ω é uma superfície analítica (n − 1)−dimensional
ii. Hn−1 ((∂E − ∂∗ E∩)Ω) = 0
Como vimos nos capítulos precedentes a demosntarção desse Teorema se mostrou
bastante sofisticada se utilizando principalmente para a mesma o Lema de De Giorgi e a
Teoria de Regularidade de De Giorgi-Nash-Moser. Como fora mostrado também Herbert
Federer melhorou a estimativa dos pontos singulares provando nas hipóteses do Teorema
de De Giorgi, que
Hs (∂E − ∂∗ E) = 0, ∀s > n − 8
O resultado de De Giorgi-Federer foi generalizado por U. Massari (ver [57]), no caso
de fronteiras com curvatura média limitada. Na formulação do resultado de Federer está
contido o resultado que
∂E − ∂∗ E = ∅ se n < 8
isto é, o fato que as fronteiras mínimas de dimensão menor ou igual a 6 não tem pontos
singulares.
CAPÍTULO 10. APLICAÇÃO À TEORIA DE VARIEDADES MÍNIMAS
183
10.2 Cones Mínimos
A obtenção da dimensão do conjunto singular fora um trabalho elaborado que contou
com as contribuições de W.H.Fleming, E. de Giorgi, F. Almgren e J. Simons. Para
obtê-los, a técnica usada foi o estudo de cones tangentes nos pontos de ∂E − ∂∗ E
CONES TANGENTES: Como já vimos, se x ∈ ∂E − ∂∗ E seja
Eρ = {y; x + ρy ∈ E}, 0 < ρ < dist(x, ∂E)
Sendo ∂E mínima em Ω temos
Per(∂E ∩ Bρ (x)) ≤ nwn ρn−1 , ∀ ρ < dist(x, ∂E)
Então,
Per(∂Eρ ∩ B1 (x)) ≤ nwn , ∀ ρ < dist(x, ∂E)
A família {Eρ } é compacta com respeito à convergência L1loc (B1 ), logo existem
e tais que
sequências ρh → 0 e conjuntos E
e em L1 (B1 ).
Eρh → E,
loc
e tem necessariamente fronteira mínima em B1 e dessa forma deve ser
O conjunto E
um cone! (Como fora apresentado no capítulo 8 deste trabalho). O Lema de De Giorgi
implica que se esse cone é um semi-espaço então ∂E é analítica em E. Como já vimos J.
Simons provou em 1968 que qualquer cone mínimo em Rn , n ≤ 7 é um semi-espaço. Este
resultado é suficiente para concluir que as fronteiras mínimas em Rn , n ≤ 7 são analíticas.
Finalmente, o problema da existência de pontos singulares para fronteiras mínimas em
Rn , n ≥ 8, como já fora citado foi resolvido por E. Bombieri, E. De Giorgi e E. Giusti em
1969, quando os mesmos provaram que o cone de Simons
S = {x ∈ R8 ; x21 + ... + x24 < x25 + ... + x28 }
tem fronteira mínima. Outros resultados sobre a existência de cones mínimos singulares
foram obtidos por P. Simões [106] e B. Lawson [107].
CAPÍTULO 10. APLICAÇÃO À TEORIA DE VARIEDADES MÍNIMAS
184
10.3 Problema de Bernstein
Em 1915, S. Bernstein em [47] provou que as funções afins u(x) = ha, xi + b são as
únicas soluções inteiras da equação das superfícies mínimas no plano
X
i
Di
p
Di u
1+
|Du|2
= 0 em R2
(10.1)
Este teorema sugeriu o seguinte problema: Existem soluções inteiras da equação (10.1)
em Rn ? Esse problema ficou conhecido como o Problema de Bernstein. Com os trabalhos
de Fleming [48], Almgren [49], De Giorgi [50],[51], [52], [53] e Simons [54] o Problema de
Bernstein foi parcialmente resolvido com o seguinte Teorema
Teorema 10.3.1. (Bernstein Problem - Parte I) Seja u : Rn → R uma solução
inteira da equação (10.1). Então n ≥ 8 ou o gráfico de (10.1)é um hiperplano.
E finalmente resolvido com os exemplos de Bombieri-De Giorgi-Giusti [43] sobre cones
mínimos.
Teorema 10.3.2. (Bernstein Problem - Parte II) Seja n ≥ 8 . Então existem
soluções inteiras da equação (10.1) cujos gáficos não são hiperplanos.
Estas soluções não são construidas explicitamente e muitos aspectos das mesmas são
desconhecidos. Por exemplo, essas soluções tem crescimento polinomial [55]? O Cone
Tangente no Infinito do gráfico de uma solução inteira de (10.1) é único?.
Vejamos um elo interessante entre cones mínimos não triviais e a equação das
superfícies mínimas.
Em 1962 W. H. Fleming provou o seguinte: Se f ∈ C2 (Rn ) verifica
gradf
p
1 + |gradf|2
div
!
(x) = 0, ∀x ∈ Rn ,
e se f não é um polinômio de grau menor ou igual que um, isto é, se gradf(x) não é
constante, então existem cones mínimos singulares em Rn+1 . Mais exatamente Fleming
provou que para qualquer sequência ρh → ∞ existe uma sequência h(s) crescente de
e tal que
inteiros e um cone mínimo singular E
e = lim{(x, t) ∈ Rn ; x ∈ Rn , t < ρ−1 f(ρh(s) x)}
E
h(s)
s
Ennio De Giorgi provou que nas hipóteses de W.H. Fleming existem cones mínimos
singulares em Rn . As observações de De Giorgi e Fleming juntas com o resultado de
CAPÍTULO 10. APLICAÇÃO À TEORIA DE VARIEDADES MÍNIMAS
185
Simons fornece a prova da validade do Teorema de S. Bernstein para funções até 7
variáveis. Os já citados E. Bombieri, E. De Giorgi e E. Giusti provaram em 1965 que
existem soluções não triviais da equação das superfícies mínimas em R8
Capítulo
11
Aplicações à Problemas de Fronteira
Livre
Conteúdo
11.1 Problemas de Fronteira Livre . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
11.1.1 Motivação: Problema de obstáculo . . . . . . . . . . . . . . . . . . . . 187
11.1.2 Existência e unicidade . . . . . . . . . . . . . . . . . . . . . . . . . . 187
11.1.3 Regularidade C1,α da fronteira livre . . . . . . . . . . . . . . . . . . . 189
11.2 Melhoramentos dos resultados de regularidade . . . . . . . . . . . . . . . . . . 191
11.2.1 Soluções Q-fracas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
11.2.2 A Classe de Planaridade . . . . . . . . . . . . . . . . . . . . . . . . . 192
11.2.3 Regularidade da Fronteira Livre . . . . . . . . . . . . . . . . . . . . . 193
11.1 Problemas de Fronteira Livre
N
este capítulo faremos um pequeno compêndio de algumas aplicações de Teoria
Geométrica da Medida à Teoria de Problemas de Fronteira Livre.
Problemas de fronteira livre são o tema central no estudo de fenômenos onde
ocorrem transições de fase. Os mesmos surgem quando se tenta descrever uma mudança
descontínua de comportamento em alguma quantidade (física ou biológica). Aplicações
aparecer no tempo de parada para um controle ótimo, hidrologia de águas subterrâneas,
teoria da plasticidade, problemas de design ótimo, problemas de supercondutividade, etc.
Exemplos típicos: mistura de gelo-água, contração de membrana em uma região, problema
obstáculo, comportamento laminar de chamas como limite assintótico para a ativação de
alta energia.
CAPÍTULO 11. APLICAÇÕES À PROBLEMAS DE FRONTEIRA LIVRE
187
11.1.1 Motivação: Problema de obstáculo
Trararemos nessa subseção de um dos mais conhecidos problemas de fronteira livre: O
Problema de obstáculo: Dada uma membrana elástica u presa a uma fronteira fixada ∂D
e um obstáculo ϕ, buscamos a posição de equilíbrio para a membrana quando a movemos
para baixo em direção ao obstáculo. Matematicamente, tal problema pode ser escrito da
seguinte forma: Dado um domínio D e funções suaves g : ∂D → R (a deformação da
fronteira fixada) e ϕ : D → R (o obstáculo), almejamos minimizar
Z
2
D
1
|∇v(x)| dx; v ∈ H (D), v = g em ∂D e v ≥ ϕ
ainda assumiremos que sup ϕ < inf g e sup ϕ > sup g.
∂D
∂D
D
(11.1)
∂D
Ressaltamos que tal configuração modela outros problemas como: problemas em
teoria do potencial, matemática financeira (teoria de opção de preços), controle ótimo
estocástico, entre outros.
11.1.2 Existência e unicidade
Teorema 11.1.1. Existe uma única solução do problema de obstáculo (11.1). Além disso,
o minimizante u é uma função superharmônica em D e harmônica em {u > ϕ}.
Proof: Teixeira [45] pag. 60.
Figura 11.1: A classe de planariddade
Problema de Fronteira Livre 1 (Problema de Obstáculo normalizado local.)
Dado uma função C1,1 w definida em B1 , a qual satisfaz;
i. w ≥ 0 em B1 ;
ii. △w ≤ 1 no sentido das distribuições;
iii. No conjunto Ω(w) = {w > 0}, △w = 1;
CAPÍTULO 11. APLICAÇÕES À PROBLEMAS DE FRONTEIRA LIVRE
188
iv. 0 ∈ Ω(w)
o que se pode dizer sobre a fronteira livre ∂Ω(w)?
Podemos ressaltar a propriedade de reescalonamento do problema: se w satisfaz as
condições acima em B1 , então para qualquer λ > 0, wλ (x) =
1
w(λx)
λ2
satisfaz as mesmas
hipóteses em Bλ .
O próximo resultado informa que a função w cresce ao longo da fronteira livre no
máximo a um taxa regida pela regularidade C1,1 . Esta condição de não degenerecência é
utilizada a fim de investigar as propriedades de regularidade da fronteira livre.
Lema 11.1. (Não-degenerecência) Seja x0 ∈ Ω. Então sup w ≥
Br (x0 )
1 2
r.
2r
1
Proof: A função v(x) = w(x) −
|x − x0 |2 é harmônica em Ω ∩ Br (x0 ), v(x0 ) ≥ 0
2n
e v ≤ 0 em ∂Ω ∩ Br (x0 ). Pelo Princípio do Máximo existe um y ∈ ∂Br (x0 ) ∩ Ω tal que
v(y) > 0 e isso prova o lema.
Lema 11.2. (Densidade Uniformemente positiva de Ω). Seja x0 ∈ ∂Ω um ponto
da fronteira livre. Então existe uma constante universal σ > 0 tal que
|Ω ∩ Br (x0 )|
≥ σ,
rn
para qualquer 0 < r < dist(x0 , ∂B1 ).
Proof: Do Lema de Não-degenerecência (11.1) existe y ∈ B 2r (x0 ) tal que w(y) ≤ cr2 .
Pela estimativa C1,1 , |∇w| ≤ Cr em B 2r (x0 ). Assim, Bcr (y) ⊂ Ω, e finalmente,
σrn = |Bcr (y) ∩ Br (x0 )| ≤ |ΩBr (x0 )|.
Lema 11.3. Seja x0 ∈ ∂Ω um ponto genérico da fronteira livre e Sh = {0 < w < h2 }.
Então
|Sh ∩ Br (x0 )| ≤ C.h.rn−1 .
Proof: Veja Teixeira [45] pag. 67.
Segue como consequência desta estimativa e da densidade uniformemente positiva de
Ω a finitude da medida de Hasdorff n−1 dimensional da fronteira livre, mais precisamente
CAPÍTULO 11. APLICAÇÕES À PROBLEMAS DE FRONTEIRA LIVRE
189
Teorema 11.1.2. Seja Nδ a δ−vizinhança da fronteira livre, isto é,
Nδ = {x ∈ B1 ; dist(x, ∂Ω) ≤ δ}.
Então para qualquer bola Br (x0 ), centrada num ponto x0 da fronteira livre tem-se
|Nδ ∩ Br (x0 )| ≤ C.δrn−1 .
Em particular, a fronteira livre tem medida de Hausdorff Hn−1 localmente finita e
Hn−1 (∂Ω ∩ Br (x0 )) ≤ Crn−1 .
Proof: Veja Teixeira [45] pag. 68.
11.1.3 Regularidade C1,α da fronteira livre
Nesta subseção estabeleceremos regularidade C1,α da fronteira livre ∂{w > 0} ∩ B 1 nas
2
proximidades dos pontos onde o conjunto de contato Λ(w) = {w = 0} não é muito “fino”.
Um ponto x ∈ Rn será escrito como x = (x , xn ), onde x = (x1 , ..., xn−1 ). Nosso primeiro
′
′
resultado refere-se a suavidade da fronteira livre de soluções globais, se w é uma solução
global, 0 ∈ ∂Ω(w) = ∂{w = 0} e em Λ(w) = {w = 0} “adequa-se” uma bola de raio ρ,
então (próximo a origem) todas as superfícies de nível de w são uniformente (dependendo
somente de ρ) Lischitz contínuas. Mais precisamente, temos
Lema 11.4. Seja w uma solução global, 0 ∈ ∂Ω(w) = ∂{w = 0}. Assuma que existe
uma bola B = Bρ (−µen ) ⊂ Λ(w) = {w = 0}, para algum 0 < µ < 12 . Então para qualquer
vetor unitário σ, com σn > 0 e |σ | ≤ ρ8 ,
′
Dσ w ≥ 0
no conjunto C = {x ∈ Rn ; |x | ≤ ρ8 , −µ < xn < 1}. Em particular, todas as superfícies de
′
′
nível {w = λ}, próximas a origem, são gráficos, xn = f(x , λ), de uma função Lipschitz f,
com ||f||Lip ≤ Cρ .
Proof: Veja Teixeira [45] pag. 73.
Lema 11.5. Sob as mesmas hipótese do Lema (11.4) ,
Den w(x) ≥ C(ρ)dist(x, Λ),
CAPÍTULO 11. APLICAÇÕES À PROBLEMAS DE FRONTEIRA LIVRE
′
′
para qualquer x ∈ C = {x ∈ Rn ; |x ≤
ρ
|, −µ
16
190
< xn < 1}. Em particular ,
Dσ w(x) ≥ C(ρ)dist(x, Λ),
′
para qualquer vetor unitário σ satisfazendo σn > 0 e |σ | ≤
ρ
.
16
Proof: Veja Teixeira [45] pag. 74.
′
′
′
Teorema 11.1.3. Seja D = {(x , xn ); |x | ≤ 1, f(x ) < xn < 2L}, para alguma função
Lipschitz f com ||f||Lip ≤ L. Sejam v1 e v2 duas soluções não-negativas de div(A(x)Df) =
0, para alguma matriz elíptica mensurável limitada A(x) em D. Assuma que v1 e v2
′
′
′
anulam-se continuamente em {xn = f(x )}. Então. em D 1 = {(x1 , xn ); |x | ≤ 12 , f(x ) <
2
xn < L}, o quociente
u(x) =
v1 (x)
v2 (x)
′
é limitado e α−Hölder contínuo até a fronteira de {xn = f(x )}. Além disso,
||u||L∞ (D 1 ) , ||u||Cα (D 1 ) ≤ C.
2
2
v1 ( L2 en )
,
v2 ( L2 en )
onde D 1 = B 1 ∩ D e C depende somente da eliticidade de A(x) e de L.
2
2
Proof: Veja Caffarelli-Salsa [87], seção §11.1.
Com o auxílie de tais resultados podemos em fim enunciar
′
Teorema 11.1.4. Sob as hipóteses do Lema 11.4 , as superfícies de nível {xn = f(x , λ)}
são uniformemente C1,α salvo na fronteira livre λ = 0.
Proof: Escrevamos as superfícies de nível {w = λ} como o gráfico de uma função
xn = f(x ). Do Lema (11.4), f é Lipschitz contínua em C = {x = (x , xn ); |x | ≤ ρ8 , −µ <
′
′
′
xn < 1}. Agora seja σ qualquer vetor unitário com σn > 0. Ao aplicarmos o Lema (11.5)
"ρ
ρ 2
ρ
e = a1 16
σ + en , onde a = 1 + ( 16
) + 2( 16
)σn , obteremos
ao vetor unitário σ
0 < ǫ(ρ) ≤ Dσe w =
1ρ
wσ + W en .
a 16
Ao aplicarmos o Teorema (11.1.3) as funções wσe e wen concluiremos que
1
a
ρ wσ
+1
16 wen
Isto, finalmente implica que Dσ f = −
∈ C1,α .
wσ
é uniformemente Hölder contínua em C.
wen
CAPÍTULO 11. APLICAÇÕES À PROBLEMAS DE FRONTEIRA LIVRE
191
11.2 Melhoramentos dos resultados de regularidade
11.2.1 Soluções Q-fracas
Definição 11.1. Seja Q : Ω → R uma função Hölder contínua que satisfaz
0 < c ≤ Q(x) ≤ C, ∀x ∈ Ω
(11.2)
Diremos que uma função u : Ω → R é uma solução Q− fraca se
i. u é não- negativa, não-degenerada e Lipschitz contínua. Em particular existem
constantes c, C tais que
1
c≤
r|∂Br (x)|
Z
∂Br (x)
udS ≤ C
para qualquer bola centrada nos pontos da fronteira livre x ∈ ∂{u > 0};
ii. △u = QHn−1 ⌊∂∗ {u > 0} no sentido que
Z
Ω
△u(x)ψ(x)dx =
Z
QψdS
∂∗ {u>0}
para qualquer ψ ∈ C∞
0 (Ω).
Do ponto de vista da medida-teórica, soluções Q− fracas gozam de boas propriedade.
Vejamos algumas
Lema 11.6. Seja u uma solução Q− fraca, então
Hn−1 (∂{u > 0} − ∂∗ {u > 0}) = 0
Proof: Isto é uma consequência do fato que para quase todos os pontos x0 ∈ ∂{u >
0} − ∂∗ {u > 0} temos
|Dχ{u>0} |(Br (x0 )) = o(rn−1 )
Portanto se u0 é o limite proveniente do procedimento de blow-up da sequência uk (x) =
1
u(x0
rk
n
+ rk x), teremos para qualquer ϕ ∈ C∞
0 (R )
CAPÍTULO 11. APLICAÇÕES À PROBLEMAS DE FRONTEIRA LIVRE
Z
Rn
∇u0 ∇ϕdx =
Z
192
∇uk ∇ϕdx + O(1)
Z 1
x − x0
Q(x)d|Dχ{u>0} | + O(1)
= n−1 ϕ
rk
rk
1
≤ C. n−1 |Dχ{u>0} |(Brk (x0 )) + O(1)
rk
Rn
→ 0.
Logo u0 é harmônica em Rn . Dado que u0 ≥ 0 e u0 (0) = 0 segue do Princípio do
Máximo que u0 ≡ 0, mas isso contradiz a não degenerecência.
11.2.2 A Classe de planaridade
Nessa subseção será explorada assim conhecida classe de planaridade. Em algum
sentido, tentaremos medir o quanto plano é a fronteira livre ao redor de um ponto x0 da
mesma. Mais precisamente, temos
Definição 11.2. (A Classe de planaridade) Sejam 0 < σ+ , σ− ≤ 1 e τ > 0. Diremos
que u é de classe F(σ+ , σ− , τ) em Bρ (0), se
i. u é uma solução Q−fraca, para alguma função Hölder contínua Q satisfazendo
(11.2);
ii. 0 ∈ ∂{u > 0} e
u(x) = 0 para xn ≥ σ+ ρ
u(x) ≥ −Q(0)(xn + σ− ρ) para xn ≤ −σ− ρ
iii. |∇u(x)| ≤ Q(0)(1 + τ) em Bρ e oscBρ Q ≤ Q(0)τ.
Mais geralmente, mudando a direção en por ν e a origem por x0 na definição acima
obteremos a classe de planaridade F(σ+ , σ− , τ) em Bρ (X0 ) na direção ν.
Observe que se u é da classe F(σ+ , σ− , τ) em Bρ (0), então a fronteira livre está situada
na faixa {−σρ < xn < σ+ ρ}. Também o conjunto de contato, {u = 0} tem uma medida
positiva que não excede |Bρ ∩ {xn > σ+ ρ}|
CAPÍTULO 11. APLICAÇÕES À PROBLEMAS DE FRONTEIRA LIVRE
193
Figura 11.2: A classe de planariddade
Proposição 11.1. Seja x0 ∈ ∂∗ {u > 0}. Então u ∈ F(σρ , 1; ∞) em Bρ (x0 ) na direção
ν(x0 ), com σρ quando ρ → 0.
Proof: Dado que σ− foi tomado a ser 1 e τ = ∞ , a única condição que resta
verificar é que u(x) = 0 para xn > σ+ ρ, com σ+ = σρ → 0 quando ρ → 0. Isto é
uma consequência imediata do fato que qualquer limite proveniente do procedimento de
1
blow-up u∞ = lim u(x0 + nj x) anula em {x ∈ Rn ; hx, ν(x0 )i ≥ 0} (Veja por um instante
j→∞ nj
o Teorema do plano tangente assintótico (4.3.1)).
11.2.3 Regularidade da Fronteira Livre
Teorema 11.2.1. Seja u uma solução Q−fraca em D ⊂⊂ Ω. Existem constantes
positivas α, β, σ0 , τ0 e C as quais dependem da dimensão, Ω, D, min Q, max Q, da norma
e do expoente de Hölder continuidade de Q, tais que
2
u ∈ F(σ, 1; ∞) em Bρ (x0 ) na direção ν, com σ ≤ σ0 e ρ ≤ τ0 σ β implica
B ρ4 (x) ) ∩ ∂{u > 0} é uma superfície C1,α
Proof: Veja Teixeira [45] pag. 153.
Compare esse resultado com o Teorema de De Giorgi-Federer-Massari-Miranda (8.5.2).
Uma consequência imediata da Proposição (11.1) e do Teorema (11.2.1) é o seguinte
importante resultado:
Teorema 11.2.2. Seja u uma solução Q−fraca. Então a fronteira livre reduzida, ∂∗ {u >
0}, é localmente uma superfície C1,α em Ω. Além disso, o possível conjunto singular é um
conjunto fechado Hn−1 negligenciável.
CAPÍTULO 11. APLICAÇÕES À PROBLEMAS DE FRONTEIRA LIVRE
Novamente
podemos
fazer
a
ligação
com
o
Teorema
194
de
De
Giorgi-Federer-Massari-Miranda (8.5.2) . Além disso, podemos segundo a estimativa de
Federer do conjunto singular conjecturar que a estimativa sharp do conjunto sigular é Hs
negligenciável, com s> n-8 (Tal estimativa sharp ainda é um problema em aberto).
Para finalizarmos, com a teoria exposta podemos enfim estudar de maneira mais
paupável o seguinte exemplo:
Exemplo 11.1. Seja u ≥ 0 definida na bola unitária B1 ⊂ Rn . Suponha ∆u = dµ para
alguma medida de Radon µ não-negativa com spt(µ) ⊂ {u = 0}. Então podemos inferir
que
i. Supondo também que µ(Br (x)) ≤ Λrn−1 para algum Λ > 0 e para x ∈ spt(µ). Então
u é Lipschitz no interior de B1 ;
ii. Se λrn−1 ≤ µ(Br (x)) ≤ Λrn−1 para λ, Λ > 0 e x ∈ spt(µ). Então o conjunto
{x ∈ B1 ; u(x) > 0} tem perímetro localmente finito no interior de B1 , ou seja, o
mesmo é um conjunto de Caccioppoli.
iii. Pode-se dar uma estimativa aproximada de Hn−1 (∂∗ {u > 0} ∩ B 1 ) do item anterior,
2
segundo os resultaodos da teoria temos
Hn−1 (∂∗ {u > 0} ∩ B 2r ) ≤ C(n, λ, Λ)rn−1 .
Capítulo
12
Apêndice
Neste capítulo se encontrarão as exposições, referências e citações feitas no decorrer
deste trabalho das quais somente foram utilizados seus resultados sem preocupação alguma
em demonstrá-los, uma vez que não prejudica o desenvolvimento do mesmo.
Teorema 12.0.3. (Hanh-Banach) Seja E um espaço vetorial sobre R e seja p : E → R
uma aplicação tal que:
i. p(λx) ≤ λp(x), ∀x ∈ Eeλ > 0;
ii. p(x + y) ≤ p(x) + p(y), ∀x, y ∈ E
Se G é um subespaço vetorial de E e g : G → R é uma função linear tal que:
g(x) ≤ p(x), ∀x ∈ G
então existe uma forma linear f, definida em E que prolonga g, isto é,
f(x) = g(x), ∀G e tal que f(x) ≤ p(x)∀x ∈ E
Proof: Veja Lima [67] pag. 5.
Teorema 12.0.4. (Teorema de Tietze diferenciável) Seja X um subconjunto fechado
de uma variedade M ∈ Cr . Toda aplicação f : X → Rn , de classe Ck
(k ≤ r), pose ser
estendida a uma aplicação h : M → Rn , de classe Ck defineda em toda a variedade.
Proof: Veja Lima [42] pag. 202.
Teorema 12.0.5. (Teorema da Extensão de Whitney) Sejam C ⊂ Rn um
subconjunto fechado e f : C → R e d : C → Rn são contínuas. Pondo
195
CAPÍTULO 12. APÊNDICE
i. R(y, x) =
196
f(y) − f(x) − d(x).(y − x)
|x − y|
(x, y ∈ C, x 6= y)
ii. K ⊂ C compacto, pomos ρK (δ) = sup{|R(y, x)|; 0 < |x − y| ≤ δ, x, y ∈ K}
Assuma também que ρK (δ) → 0 quando δ → 0. Então existe uma função f : Rn → R tal
que
i. f ∈ C1
ii. f = f, Df = d em C
Proof: Veja Evans-Gariepy [6] pag. 245.
Teorema 12.0.6. (Aproximação de funções Lipschitz por funções C1 )
Seja f : Rn → R uma função contínua Lipschitziana. Então para cada ε > 0 existe
uma função de classe C1 f : Rn → R tal que
Ln ({x; f(x) 6= f(x) ou Df(x) 6= Df(x)}) ≤ ε
Proof: Veja Evans-Gariepy [6] pag. 251.
Teorema 12.0.7. (Teorema de Riesz-Markov) Sejam X um espaço de Hausdorff
localmente compacto e F um funcional linear
positivo em C0 (X). Então existe uma única
Z
medida de Radon µ em X tal que F(f) = fdµ para toda f ∈ C0 (X). Além disso, µ satisfaz
µ(U) = sup{F(f); f ∈ C0 (X), f ≺ U} para todo aberto U ⊂ X
(12.1)
µ(K) = inf{F(f); f ∈ C0 (X), f ≥ χK } para todo compacto K ⊂ X
(12.2)
e
Aqui f ≺ U denota que 0 ≤ f ≤ 1 e spt(f) ⊆ U.
Proof: Veja Folland [40] pag. 212.
Teorema 12.0.8. (Teorema de Morse-Sard-Federer) Para inteiros m > ν ≥ 0, k ≥
1, seja f uma função de classe Ck de um subconjunto aberto A ⊆ Rn sobre um espaço
vetorial normado Y. Então
Hν+
m−ν
k
(f({x ∈ A; rankDf(x) ≤ ν})) = 0
CAPÍTULO 12. APÊNDICE
197
Note que a versão usual deste resultado, pode ser recuperada, tendo Y = Rn , ν =
n − 1, k ≥ m − n + 1. A mais recente melhoria foi fornecida por Bates.
Proof: Veja Morgan [7] pag. 113.
Teorema 12.0.9. (Teorema de Rademacher) Seja f : Rn → Rm uma função
localmente Lipschitziana. Então f é diferenciável em Ln −quase sempre. Aqui Ln denota
a medida n−dimensional de Lebesgue.
Proof:Veja Evans-Gariepy [6] pag. 81.
Lema 12.1. (Lema de Zorn) Todo conjunto parcialmente ordenado, indutivo,
não-vazio, admite um elemento maximal.
Proof: Veja Brezis [41] pag. 2.
Teorema 12.0.10. (Teorema de De La Vallée Poussin) Seja µk uma sequência de
medidas de Radon não-negativas com variação total uniformemente limitada, isto é,
(12.3)
µ(Rn ) ≤ M ∀ k.
Então existe uma medida de Radon µ e uma subsequência {νj } = {µkj } tal que, para todo
g ∈ C00 (Rn )
(12.4)
µ(g) = lim νj (g)
j→∞
Além disso, para todo conjunto Boreliano limitado E tal que µ(∂E) = 0 tem-se
(12.5)
µ(E) = lim νj (E)
j→∞
Proof: Veja Giusti [3] pag. 218.
Teorema
12.0.11. (Teorema
de
Besicovitch
para
Diferenciação
de
Medidas)Sejam µ1 , µ2 medidas de Radon em Ω, onde Ω tem a propriedade simétirca
de Vitali com respeitoa µ1 . Então
µ2 (Bρ (x))
ρ→0 µ1 (Bρ (x))
Dµ1 µ2 (x) = lim
CAPÍTULO 12. APÊNDICE
198
existe µ1 −quase sempre e é µ1 − mensurável. Além disso para qualquer conjunto Boreliano
A⊂Ω
onde
µ∗2
µ2 (A) =
Z
Dµ1 µ2 dµ1 + µ∗2 (A),
A
= µ2 Z, é um conjunto Boreliano de µ1 −medida zero (Z independente de A)
Observação 12.1. Seja µ qualquer medida de Radon em Ω. Diremos que Ω tem a
Propriedade Simétrica de Vitali relativamente a µ se para toda coleção B de bolas
que abrange o seu conjunto de centros de A = {x; Bρ (x) ∈ B para algum ρ > 0}
finamente, isto é, para cada x ∈ A tem-se inf{ρ; Bρ (x) ∈ B} = 0, existe uma subcoleção
′
enumrável disjunta B ⊂ B cobrindo µ−quase todo A, desde que µ(A) < ∞
Proof: Veja Simon [9] pag. 24.
Seja Ω ⊂ Rn um corpo feito de algum material uniforme, em ∂E prescreveremos
alguma temperatura fixada f. Agora considere o seguinte: Qual é a temperatura de
equilíbrio dentro de Ω?. Matematicamente, se u denota a temperatura em Ω, então
queremos resolver a equação
∆u = 0, em Ω
(12.6)
u = f, na ∂Ω
O Princípio de Dirichlet: O Princípio de Dirichlet consiste em substituir o problema
(8.6) pelo seguinte problema de minimização:
I = inf{
Z
Ω
|∇v|2 ; v ∈ C2 (Ω) tal que v = f em ∂Ω}
(12.7)
Qualquer função v ∈ C2 (Ω) tal que v = f em ∂Ω é chamada uma função admissível.
Então diremos que ∆u = 0 é a equação de Euler-Lagrange associada ao funcional
J(v) =
Z
|∇v|2
Ω
Assim, podemos enunciar o
Teorema 12.0.12. (Teorema de Riemann) u é solução de (12.6), se e somente se, u
minimiza (12.7).
Proof: Veja Ponce [78] pag. 2.
CAPÍTULO 12. APÊNDICE
199
Teorema 12.0.13. (Teorema de Extensão de aplicações Lipschitzianas) Assuma
que Ω ⊆ Rn e seja f : Ω → Rm Lipschitziana. Então existe uma aplicação Lipschitziana
fb : Rn → Rm tal que
i. fb = f em Ω
b ≤
ii. Lip(f)
√
mLip(f)
|f(x) − f(y)|
; x, y ∈ Ω, x 6= y
onde Lip(f) = sup
|x − y|
Proof: Veja Evans-Gariepy [6] pag. 80.
Teorema 12.0.14. (Teorema sobre funções Absolutamente conínuas) As seguintes
condições para uma função f a valores reais definida em um conjunto compacto [a, b] são
equivalentes:
i. f é absolutamente contínua;
′
ii. f tem uma derivada f em quase todo ponto, a derivada é integravél à Lebesgue,e
f(x) = f(a) +
Zx
′
f (t)dt
a
para todo x ∈ [a, b];
iii. Existe uma função integrável à Lebesgue g em [a, b] tal que
f(x) = f(a) +
Zx
g(t)dt
a
para todo x ∈ [a, b]
′
Se essas condições são satisfeitas então necessariamente g = f em quase todos os pontos.
A equivalência entre (i) e (ii) é conhecido como Teorema Fundamental do Cálculo da
integral de Lebesgue, devido à Lebesgue.
Proof: Veja Wheeden-Zygmund [86].
Teorema 12.0.15. (Fórmula de Gauss-Green) Seja U um conjunto aberto limitado
do Rn com ∂U Lipschitz. Se ϕ ∈ C1 (U; Rn ), então
Z
divϕdx =
U
Z
ϕνdHn−1 ,
∂U
CAPÍTULO 12. APÊNDICE
200
onde ν é o campo normal unitário definido Hn−1 −quase sempre sobre ∂U.
Proof: Veja Araújo [83], pág. 22
Referências Bibliográficas
[1] ADAMS, Robert A. Sobolev spaces. 2a .ed. New York : Academic Press, 1975. (Pure
and Applied Mathematics, 65).
[2] EVANS, Lawrence C. Partial differential equations. 1a .ed. Providence, RI : American
Mathematical Society, 1998. (Grauate Studies in Mathematics, 19)
[3] GIUSTI, Enrico. Minimal surface and functions of bounded variation. Boston:
Birkhäuser, 1984. (Monographs in mathematics, 80)
[4] FEDERER, Herbert. Geometric measure theory. Berlin: Springer-Verlag, 1969.
[5] MIRANDA, Mario. Medida geométrica e algumas aplicações. (12o Colóquio Brasileiro
de Matemática). Rio de Janeiro: IMPA, 1979.
[6] EVANS, Lawrence C; GARIEPY, Ronald F. Measure theory and fine properties of
functions. (Studies in Advanced Mathematics). Boca Raton: CRC Press. 1992..
[7] MORGAN, Frank. Geometric measure theory: a beginnerr’s guide. San Diego:
Academic Press, 1988.
[8] LIN, Fanghua; YANG, Xiaoíng. Geometric measure theory: an introduction. Beijin:
Science Press and International Press, 2002.
[9] SIMON, Leon. Lectures on geometric measure theory. Canberra:
Centre for
Mathematical Analysis, Australian National University, 1983.
[10] AMBROSIO, Luigi; FUSCO, Nicola; PALLARA, Diego. Functions of bounded
variation and free discontinuity problems. Oxford: Clarendon Press, 2000. (Oxford
Mathematical Monogrophics).
[11] ZIEMER, William P. Weakly differentiable functions Sobolev spaces and functions
of bounded variation. New York:
Springer - Verlag,1989. (Graduate texts in
mathematics, 120).
201
REFERÊNCIAS BIBLIOGRÁFICAS
202
[12] PACHECO, Maria de Fátima. Funções de Variação Limitada. Tese. Universidade do
Porto, 2001.
[13] RATAJ, Jan. Three lectures on geometric measure theory. Sandbjerg Estate,
SØNDERBORG, DENMARK, 2007.
[14] NONNENMACHER, Dirk Jens F. Sets of finite perimeter and the Gauss-Green
theorem with singularities. J. London Math. Soc. (2), v. 52, p. 335-344, 1995.
[15] AMBROSIO, Luigi. On some recent developments of the theory of sets of finite
perimeter. Rend. Mat. Acc. Lincei s. 9, v. 14, p. 179-187, 2003.
[16] LANG, Urs. Introduction to geometric measure theory. Spring school Geometric
Measure Theory: Old and New. Les Diablerets, Switzerland, 2005.
[17] MORGAN, Simon. Introduction to geometric measure theory. Notes Spring, 2005.
[18] GÜR, Metin Alper. Introduction to geometric measure theory and area minimizing
surfaces. Koç University, 2010.
[19] ALBERTINI, Giovanni. Geometric measure theory. Encyclopedia of Mathematical
Physics, v 02, p. 520-527. Elsevier, Oxford, 2006.
[20] WAEIZSÄCKER, Heinrich von. Fractal sets and preparation to geometric measure
theory. Notes by Johannes Geißler. Universität Kaiserslautern, 2006.
[21] ARBIETO, Alexander; MATHEUS, Carlos; OLIVEIRA, Krerley . O trabalho de
Ennio De Giorgi sobre o problema de Plateau. Revista Matemática Universitária n.
35, p. 1-29, 2003.
[22] AMBROSIO, Luigi; CASELLES, Vicent; MASNOU, Simon; MOREL, Jean-Michel
. Connected components of sets of finite perimeter and applications to image
processing. J. Eur. Math. Soc., v. 03, p. 39-92, 2001
[23] FEDERER, Herbert. Colloquium lectures on geometric measure theory. Bull. Amer.
Math. Soc. v. 84, n. 03, p. 291-338, 1978.
[24] MIRANDA, Mario. Caccioppoli sets. Rend. Mat. Acc. Lincei s. 9, v. 14, p. 173-177,
2003.
[25] HAN, Qing. A basic introduction of geometric measure theory. Notes. Peking
University, June 2006.
REFERÊNCIAS BIBLIOGRÁFICAS
203
[26] MASSARI, Umberto; MIRANDA, Mario. Minimal surface of codimension one.
Amsterdam: (North-Holland. Mathematics Studies; 91), 1984.
[27] CHEN, Gui-Qinag; TORRES, Monica; ZIEMER, William P. Gauss-Green theorem
for weakly differentiable vector fields, sets of finite perimeter, and balance laws. Wiley
Periodicals, Inc., 2008.
[28] Geometric measure theory and the calculus of variations. Proceedings of Symposia
in Pure Mathematics. American Mathematical Society. Volume 44.
[29] Ennio de Giorgi selected papers. Berlim: Springer-Verlag, 2006.
[30] FEDERER, Herbert; FLEMING, Welden H. Normal and integral currents. Ann. of
Math. v. 72, p. 458-520, 1960.
[31] MEDEIROS, Luis Adauto da Justa; MIRANDA, Manuel Antolino Milla Espaços
de Sobolev: Iniciação aos problemas plíticos não nomogêneos. Rio de Janeiro:
Universidade Federal do Rio de Janeiro, Instituto de Matemática, 2000.
[32] LEE, John M. Introduction to smooth manifolds. New York: Spring, 2003. (Graduate
texts in mathematics; 218).
[33] WHITNEY, Hassler. Analytic extensions of differentiable functions definei in closed
sets. Trans. Amer. Math. soc., v. 36, n. 1, p. 63-89, 1934.
[34] AMBROSIO, Luigi; MIRANDA JR., Michele; PALLARA, Diego. Special functions of
bounded variation in doubling metric measure spaces. Series edited by Dipartimento di
Matematica Seconda Universit‘a di Napoli. National project Calculus of Variations.
[35] MIRANDA, Mário. Gradient estimates and Harnack inequalities for solutions to the
minimal surface equation. Rend. Mat. Acc. Lincei s. 9, v. 11, p. 27-30, 2000.
[36] BOUCHEZ,
Vicent;
SCHAFTINGEN,
Jean
Van.
Extremal
funtions
in
Poincaré-Sobolev inequalities for function of bounded variation. arXiv 1001.4651v1
[math.AP] 2010.
[37] BREZIS, Haïm. Analyse Fonctionnelle: théorie et applications. Paris: Masson, 1983.
(Collection Mathématiques appliquées pour la maîtrise)
[38] BONA, Jerry e ARBOGAST, Todd. Methods of applied mathematics. Lectures Notes.
University of Texas at Austin. 2005.
[39] DACOROGNA, Bernard. Introduction to the calculus of variations. London: Imperial
College Press,2004.
REFERÊNCIAS BIBLIOGRÁFICAS
204
[40] FOLLAND, Gerald B. Real Analysis: Modern thechniques and their applications
2a . ed. New York: John Wiley, 1999. (Pure and applied mathematics: A Wiley
Interscience Series of Texts, Monographs and Tracts)
[41] BREZIS, Haim. Functional analysis, Sobolev spaces and partial differential equations.
New York: Springer, 2010.
[42] LIMA, Elon Lages. Variedades diferenciáveis. Rio de Janeiro:
IMPA. 2007.
(Publicações Matemáticas).
[43] BOMBIERI, Enrico, DE GIORGI, Ennio; GIUSTI, Enrico. Minimal cones and the
Bernstein problem. Inventiones Math, v. 7 p. 243-268, 1969.
[44] TEIXEIRA, Eduardo Vasconcelos Oliveira. Introdução à teoria de regularidade
elíptica: uma abordagem geométrica. ENAMA. 2009.
[45] TEIXEIRA, Eduardo Vasconcelos Oliveira. Elliptic regularity and free boundary
problems: an introduction. Rio de Janeiro: IMPA , 2007. (Publicações Matemáticas).
[46] ALMGREN, F.J. Q-valued functions minimizing Dirichlet’s integral and the
regularity of area minimizing rectifiable currents up to codimension 2. Princeton
University , 1984.
[47] BERNSTEIN, Sergey Natanovich. Sur un théorème de geométrie et son application
aux équations aux dérivées partielles du type elliptique. Comm. Soc. Math. de
Kharkov (2) v. 15, , p. 38-45, 1915-1917. German transl. : Math. Z. v. 26 , p.
551-558, 1927.
[48] FLEMING, W. On the oriented Plateau problem. Rend. Circ. Mat. Palermo (2), v.
11 , p. 69-90, 1962.
[49] ALMGREN, F. J. The theory of varifolds: a variational calculus in the large for the
k-dimensional area integrand. Princeton, 1965. (Mimeographed notes).
[50] DE GIORGI , Ennio. Su una teoria generale della misura (r − 1)-dimensionali de uno
spazio ad dimensioni. Ann. Mat. Pura Appl. (4) v. 36, p. 191-213, 1954.
[51] DE GIORGI , Ennio. Nuovi teoremi relativi alle misure (r − 1)-dimensionali de uno
spazio ad r dimensioni. Ricerche Mat., v. 4, p. 95-113, 1955.
[52] DE GIORGI , Ennio. Complementi alla teoria dela misura (n − 1)-dimensionale in
uno spazio n−dimensionale. Sem. Mat. Scuola Norm. Sup. Pisa, 1960-61. Editrice
Tecnico Scientifica, Pisa, 1961.
REFERÊNCIAS BIBLIOGRÁFICAS
205
[53] DE GIORGI , Ennio. Frontiere orientate di misura minima. Sem. Mat. Scuola Norm.
Sup. Pisa, 1960-61. Editrice Tecnico Scientifica, Pisa, 1961.
[54] SIMONS, J. Minimal varieties in riemannian manifolds. Ann. of Math. (2) v. 88, p.
62-105, 1968.
[55] YAU, S. T. Seminar on differential geometry, problem 123. Princeton: Princeton
Univercity. (Ann. of Math. Studies).
[56] MIRANDA, Mário. Superficie cartesiane generalizzate ed insiemi di perimetro
localmente finito sui prodotti cartesiani. Ann. Scuola Normale Superiore. Pisa; 18,
no 4, p. 515-542, 1964.
[57] MASSARI. Umberto. Esistenza e regolaritá dele ipersuperficie di curvatura media
assegnata in Rn . Arch. Rat. Mech. Anal. v. 55, p. 357-382, 1974.
[58] DOUGLAS, Jesse. Solution of the problem of Plateau. Trans.Math. Soc. v. 33, p.
263-321, 1931.
[59] RADÓ, Tibor. The problem of least area and the problem of Plateau. Math. Z. v.
32, p. 763-796, 1930.
[60] RADÓ, Tibor. On the problem of Plateau. Berlim: Springer-Verlag , 1933.
[61] REIFENBERG, E.R. Solution of the Plateau problem for m−dimensional surfaces
of varying topological type. Acta. Math. v. 104, p. 1-92, 1960.
[62] ALMGREN, F. J. Existence and regularity almost everywhere of solutions to elliptic
variational problems among surfaces of varying topological type and singulariry
structure. Ann. of Math. (2), v. 87, p. 321-391, 1968.
[63] FEDERER, Herbert. Some properties of distributions whose partial derivatives are
representable by integration. Bull. Amer. Math. Soc. v. 74, p. 183-186, 1968.
[64] MORREY, C. B. Jr. Multiples integral in the calculus of variations. Berlim:
Spring-Verlag, 1966.
[65] TAMANINI, Italo. Boundaries of Caccioppoli sets with Hölder continuous normal
vector. J. Reine Angew. Math., v.334, p. 27-39, 1982.
[66] TAMANINI, Italo. Regularity results for almost minimal oriented hypersurfaces in
Rn . Quaderni del Dipartimento di Matematica dell’ Università del Lecce, 1, 1984.
REFERÊNCIAS BIBLIOGRÁFICAS
206
[67] LIMA, Osmuldo Alves. Seminário de Análise Funcional. Universidade Estadual da
Paraíba - UEPB, 2005.
[68] MASSARI, Umberto. Frontieri orientate di curvatura media assegnata in Lp . Rend.
Sem. Mat. Univ. Padova, v. 53, p. 37-52, 1975.
[69] CAMPANATO, Sergio. Proprietà di hölderianità di alcune classi di funzione. Ann.
scuola Norm. Sup. Pisa, v. 17 no 1-2, p. 175-188, 1963.
[70] GONZALEZ, E.H.A.; MASSARI, Umberto. Variational mean curvatures. Rend. Sem.
Mat. Univ. Pol. Torino. v. 52, p. 1-28, 1994.
[71] LEONARDI, Gian Paolo. Blow-up oriented boundaries. Rend. Sem. Mat. Univ.
Padova, v. 103, p. 211-232, 2000.
[72] MIRANDA, Mario. Superficie minime illimitate. Ann. scuola Norm. Sup. Pisa, v. 4
no 2, p. 311-322, 1977.
[73] BAROZZI, E.; MASSARI, Umberto. Regularity of minimal boundaries with
obstacles. Rend. Sem. Mat. Univ. Padova, v. 66, p. 129-135, 1982.
[74] MIRANDA, Mario. Sul minimo dell’integrale del gradiente di una funzione. Ann.
scuola Norm. Sup. Pisa, v. 19 no 4, p. 627-665, 1965.
[75] PEPE, L.; MASSARI, Umberto. Successione convergenti di ipersuperfici di curvatura
media assegnata. Rend. Sem. Mat. Univ. Padova, v. 53, p. 53-68, 1975.
[76] TRISCARI, Dionisio. Sulle singolarità delle fronteire orientate di misura minima.
Ann. scuola Norm. Sup. Pisa, v. 17 no 4, p. 349-371, 1963.
[77] Partial differential equations. Proceedins Symposia in pure mathematics. American
Mathematical Society. Volume 23. 1973.
[78] PONCE, Augusto. Topics on calculus of variations . Lecture notes presented in the
School on Nonlinear Differential Equations. Trieste: Italy, 2006.
[79] BESSA, Gregório Pacceli Feitosa, JORGE, Luquésio Petrola de Melo. Sobre o
problema de Bernstein. XI Escola de Geometria Diferencial.
[80] CAMPANATO, Sergio. Equazioni ellittiche del II ordine e spazio L2,α . Ann. Mat.
Pura . Appl. v. 69. p. 321-382, 1965.
[81] GIUSTI, Enrico. Equazioni ellittiche del seconde ordine. Bologna: Pitagora, 1978.
(Quaderni U.M.I 6)
REFERÊNCIAS BIBLIOGRÁFICAS
207
[82] GIANQUINTA, M.; MODICA,G.; SOUCEK,J.. Cartesian currents in the calculus
of variations I. Berlin: Springer-Verlag, 1998.
[83] ARAÚJO, Leandro Tomaz de. Campos de medida divergente e a fórmula de
Gauss-Green. Dissertação de Mestrado. Rio de Janeiro: UFRJ/IME, 2006.
[84] GONZALEZ, Eduardo;
MASSARI, Umberto;
TAMANINI, Italo. Minimal
boundaries enclosing a given volume. Manuscripta Math., Springer-Verlag. v. 34,
p. 381 - 395, 1981.
[85] STEIN, Elias M.; SHAKARCHI, Rami. Real analysis: measure theory, integration
and Hilbert space. Princeton, N. J: Princeton Univercity Press, 2005. (Princeton
Lectures in Analysis III).
[86] WHEEDEN, Richard L., ZYGMUND, Antoni. Measure and integral: an introduction
a real analysis. New York: M. Dekker, 1977. (Monographs and textbooks in pure and
apllied mathematics, 43).
[87] CAFFARELLI, Luis A., SALSA. S. A geometric approach to free boundary problems.
Providence, R.I.: American Mathematical Society, 2005. (Graduate Studies in
Mathematics, 68).
[88] CAFFARELLI, Luis A. The regularity of free boundaries in higher dimensions. Acta
Math. v 139. n. 3-4, p. 155-184, 1977.
[89] CHEEGER, J.; COLDING, T. On the structure of spaces with Ricci curvature
bounded below. J. Differ. Geometry, v. 45, p. 406-480, 1997.
[90] SIMON, L. Asymptotic behaviour of minimal submanifolds and harmonic maps.
Proceedings Symp. Pure. Math. AMS v. 44, p. 369-378, 1986..
[91] SIMON, L. The singular set of minimal submanifolds and harmonic maps. Progress
in PDEs Cal. of Var. Appl.(Pitman Res. Notes Math. Sere 267), p. 99-108, 1992.
[92] LIN, Fanghua. Gradient estimates and blow-up analysis for stationary harmonic
maps. Ann. of Math. v. 149 n. 2, p. 785-829, 1999. .
[93] UHLENBECK, K. , YAU, S.L. On the existence of Hermitian Yang-Mills connections
in stable bundles. Comm. Pure Appl. Math. v. 39, p. 257-297, 1986.
[94] UHLENBECK, K. Removeable singularities in Yang-Mills fields. Comm. Math. Phys.
v. 83, p. 11-29, 1982.
REFERÊNCIAS BIBLIOGRÁFICAS
[95] TAUBES, C.V. SW
⇒
Gr
208
: From the Seiberg- Witten equations to
pseudo-holomorphic curves. J. Amer. Math. Soc., v. 9, p. 845-918, 1996.
[96] TAUBES, C.V. Seiberg- Witten invariants and pseudo-holomorphic subvarieties for
self-dual, harmonic 2−form. Geom. & Topol. v. 3, p. 167-210, 1999.
[97] TAUBES, C.V. The Seiberg- Witten invariants and 4−manifolds with essential tori.
Geom. & Topol. v. 5, p. 441-519, 2001.
[98] LIN, Fanghua;
RIVIERE, T. Complex Ginzburg-Landau equations in high
dimensions and area minimizing surfaces. To appear.
[99] LIN, Fanghua; WANG, C.Y. Harmonic and quasi-harmonic spheres. Comm. Anal.
Geom. v. 7, n. 2 , p. 397-429, 1999.
[100] ALMGREN, F.J. Existence and regularity almost everywhere of solutions to elliptic
variational problem with constraints. Mem. Amer. Math. Soc. v. 4 no 165, 1976
[101] BOMBIERI, E. Regularity theory for almost minimal currents. Arch. Rational
Mech. Anal. v. 78, p. 99-130, 1982.
[102] SHOEN, R.; SIMON, L. A new proof of the regularity theorem for rectifiable currents
which minimize parametric elliptic functionals. Indiana Univ. Math. J., v. 31, p.
415-434, 1982.
[103] JOST, Jürgen. Partial differential equations. New York: Springer-Verlag, 2000.
(Graduate texts in mathematics; 214).
[104] HARDT, R., SIMON. L. Boundary regularity and embedded solutions for the
oriented Plateau problem. Ann. of Math. v. 110, p. 439-486, 1979.
[105] GILBARG, David; TRUDINGER, Neil S. Elliptic partial differential equations of
second order. Berlin: Springer-Verlag, 2001.
[106] SIMÕES, P. A class of minimal cones in Rn , n ≥ 8 that minimizes area. Berkeley
Thesis, 1973..
[107] LAWSON Jr., H. B. The Equivariante Plateau problem and interior regularity.
Trans. A.M.S., 1972..
[108] BAROZZI, E.; GONZALEZ, E.A.H.; TAMANINI, I. The mean curvature of a set
of finite perimeter. Proc. A.M.S. v. 99, p. 313-316, 1987.
REFERÊNCIAS BIBLIOGRÁFICAS
209
[109] CAFFARELLI, Luis A. The Obstacle problem. Pisa: Accademia Nazionale Dei
Lincei. Scuola Normale Superiore, 1998.
[110] GONZALE. E.A.H.; MASSARI, U.; TAMANINI, I., Boundaries of prescribed mean
curvature. Rend. Mat. Acc. Lincei, s. 9, v. 4, p. 197-206, 1993.
[111] MOREIRA, Diego Ribeiro. Hausdorff measure estimates of free boundaries. IV
Workshop de Análise Geométrica. UFC. 2011.
.
Baixar