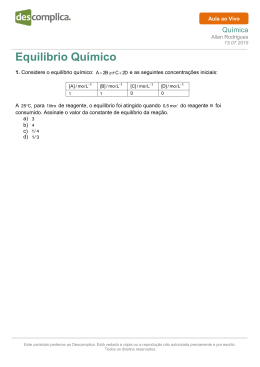
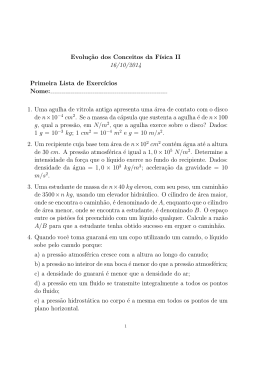
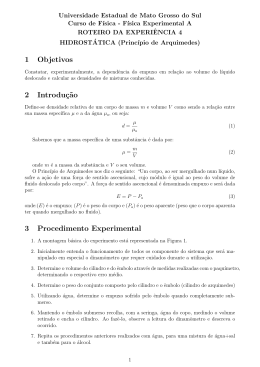
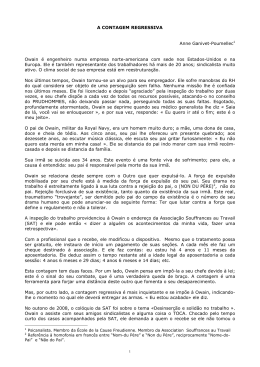
8 Mudanças de estado Benoit Paul Emile Clapeyron (1799-1864) Fı́sico e engenheiro francês nascido em Paris, que deixou uma vasta obra no domı́nio da construção de vias de comunicação (estradas e pontes) e de locomotivas. Frequentou a École Polytechnique e a École des Mines em Paris, e em 1820 aceitou um convite do czar Alexandre I da Rússia para participar na formação de engenheiros russos e para liderar projectos de obras públicas. Regressou a França em 1830, onde se tornou professor da École des Mineurs em St Étienne, e lhe foi dada a liderança de um projecto de construção da linha de caminho de ferro entre Paris e St Germain. Tornou-se também especialista no projecto de locomotivas a vapor, e em 1834 publica um trabalho onde apresenta a formulação matemática do ciclo de Carnot. Em 1844 foi nomeado professor da École des Ponts et Chaussées e em 1848 foi eleito membro da Academia das Ciências de Paris. 127 8.1 Introdução Qualquer substância pura pode existir em três estados fı́sicos diferentes (sólido, lı́quido ou gasoso), cada um deles caracterizado por propriedades fı́sicas e quı́micas bem especı́ficas. Uma substância pura é um sistema formado por uma única espécie quı́mica, elementar ou composta. As substâncias elementares são constituı́das por átomos de um mesmo elemento, nas suas diferentes variedades alotrópicas25 . São exemplos de substâncias elementares o argon (Ar), o hidrogénio (H2 ), o oxigénio (O2 ), o azoto (N2 ), e a grafite. As substâncias compostas são constituı́das por vários tipos de átomos em proporções bem definidas (podendo ser representadas por uma fórmula quı́mica), os quais só podem ser separados mediante reacções quı́micas. São exemplos de substâncias compostas a água (H2 O), o sal (cloreto de sódio, NaCl), o dióxido de carbono (CO2 ), o ácido clorı́drico (HCl), e o hidróxido de zinco (Zn(OH)2 ). Quando se combinam duas ou mais substâncias puras, sem que ocorra uma reacção quı́mica entre elas, obtém-se uma mistura. Os componentes de uma mistura mantêm a sua identidade e propriedades, podendo separar-se por meios fı́sicos usuais: destilação, dissolução, separação magnética, suspensão, filtração, decantação ou centrifugação. As misturas podem ser homogéneas (por exemplo, soluções) ou heterogéneas (por exemplo, colóides ou supensões), em função da aparência uniforme ou não uniforme que apresentam. São exemplos de misturas homogéneas o ar seco (constituı́do por cerca de 80% de N2 e 20% de O2 ), a água salgada, uma mistura de água e álcool, e o chocolate (mistura de açúcar e cacau). As misturas de água e óleo ou de sal e açúcar são heterogéneas. Cada estado de uma substância pura ou de uma mistura pode apresentar diversas fases, isto é diversas partes homogéneas caracterizadas pelas mesmas propriedades fı́sicas e quı́micas. Normalmente, uma substância pura ou uma mistura de substâncias puras nos estados lı́quido ou gasoso formam uma única fase26 . No entanto, os corpos no estado sólido podem apresentar diversas fases (sob forma de variedades alotrópicas). Um exemplo clássico deste facto é o 25 A alotropia é a propriedade que possuem determinados elementos de formar estruturas moleculares diferentes ou com propriedades distintas, no mesmo estado fı́sico. Por exemplo, o oxigénio atmosférico (O2 ) e o ozono (O3 ) são variedades alotrópicas do oxigénio (O); o fósforo vermelho e o fósforo branco (P4 ) são variedades alotrópicas do fósforo (P); a grafite, o diamante e o fulereno (C60 ) são variedades alotrópicas do carbono (C). 26 Refira-se o caso excepcional do hélio que pode apresentar duas fases lı́quidas diferentes: HeI e HeII. 128 granito, constituı́do por três fases: mica, quartzo e feldspato. Neste capı́tulo estudaremos apenas estados da matéria associados a substâncias puras, isto é constituı́das por uma única fase. Quando uma substância pura realiza uma transformação entre dois estados de equilı́brio, através de trocas de energia com o exterior (sob a forma de calor e/ou trabalho), assiste-se por vezes a uma modificação importante das suas propriedades fı́sicas, mecânicas, ópticas, eléctricas, etc. Diz-se então que o sistema sofreu uma mudança de estado. O diagrama da figura 8.1 apresenta e classifica as seis mudanças de estado que podem ocorrer entre os três estados de um sistema27 . Figure 8.1: Diagrama das mudanças de estado de um sistema Note-se que o termo sistema tem sido utilizado até aqui para designar, numa situação de equilı́brio, as partes homogéneas do Universo, caracterizadas por uma distribuição uniforme de parâmetros (p, T , N ,...). Neste capı́tulo generaliza-se este termo, apelidando também de sistema o conjunto de dois estados fı́sicos diferentes de uma dada substância, os quais se podem designar por subsistemas 1 e 2. Para este novo conceito de sistema, a situação 27 O termo condensação é por vezes substituı́do por liquefação. Nessa altura, pretendese normalmente distinguir entre as mudanças de estado lı́quido-gasoso que ocorrem de forma espontânea (a pressões próximas da atmosférica), devido a variações de temperatura (evaporação / condensação), e aquelas que são provocadas através de diferenças de pressão impostas sobre o sistema (vaporização / liquefação). 129 de equilı́brio é normalmente caracterizada por p1 = p2 T1 = T2 N1 6= N2 . Esta questão será novamente abordada e aprofundada a propósito do estudo da termodinâmica dos sistemas abertos. 8.2 Diagrama do ponto triplo O estudo experimental das mudanças de estado faz-se muitas vezes recorrendo a um gráfico (p,T ) que apresenta as zonas de pressão e temperatura onde podem existir cada um dos estados do sistema. Este gráfico designase por diagrama do ponto triplo, e tem o aspecto geral que se mostra na figura 8.2. Figure 8.2: Diagrama do ponto triplo para um sistema genérico As três curvas deste diagrama designam-se como I - Curva de sublimação Esta curva refere-se ao equilı́brio entre os estados sólido e gasoso. II - Curva de saturação Esta curva refere-se ao equilı́brio entre os estados lı́quido e gasoso. III - Curva de fusão Esta curva refere-se ao equilı́brio entre os estados sólido e lı́quido. 130 Os dois pontos caracterı́sticos deste diagrama designam-se como Y - Ponto triplo O ponto triplo Y (que dá o nome ao diagrama) é o ponto em que coexistem os três estados do sistema: sólido, lı́quido e gasoso. C - Ponto crı́tico O ponto crı́tico C é o ponto do diagrama a partir do qual deixa de haver uma diferença nı́tida entre os estados lı́quido e gasoso do sistema. Na zona (p,T ) para além do ponto crı́tico diremos que o sistema se encontra num estado fluido. Assim, qualquer mudança de estado do sistema que se realize contornando o ponto crı́tico C (ver curva Transf na figura 8.2), não permite a observação simultânea dos seus estados lı́quido e gasoso, na medida em que as propriedades fı́sicas e quı́micas do sistema (que permitem distinguir estes estados) variam de forma contı́nua durante a transformação. Observando o diagrama do ponto triplo, verificamos que a altas pressões e baixas temperaturas domina o estado sólido (muito organizado), enquanto que a baixas pressões e a altas temperaturas domina o estado gasoso (pouco organizado). Se associarmos a pressão à medida do grau de compressão dos sistemas, e a temperatura à medida da energia cinética das suas partı́culas constituintes, então as observações anteriores entendem-se facilmente. Nos sólidos, a energia interna está em geral equipartida entre a energia potencial média das ligações intermoleculares e a energia cinética média das suas moléculas, levando a estruturas organizadas (baixa entropia) em redes cristalinas. Nos gases, a energia interna é quase exclusivamente do tipo cinético na medida em que as forças de interacção entre as moléculas são, em geral, pouco intensas. Isto conduz à inexistência de estruturas organizadas (elevada entropia) no estado gasoso. 131 8.3 Equilı́brio entre dois estados de um sistema puro A mudança de estado de um sistema puro é, em geral, uma transformação isotérmica e isobárica, durante a qual ocorre uma transferência de matéria entre os dois estados do sistema. Assim, o potencial termodinâmico mais adequado ao estudo das mudanças de estado é a energia livre de Gibbs G(T, p, Ni ), dependente das variáveis temperatura T , pressão p, e número de partı́culas de cada um dos estados Ni (i = 1, 2). Considere-se então um sistema S com um número total de partı́culas N , constituı́do por dois subsistemas S1 e S2 (correspondentes aos dois estados coexistentes de S), os quais se encontram em equilı́brio térmico e mecânico, podendo trocar partı́culas entre si. A energia livre de Gibbs G do sistema pode escrever-se como a soma das energia livres de Gibbs Gi de cada um dos subsistemas i = 1, 2 G = G1 + G2 = m1 g1 + m2 g2 = N1 M g1 + N2 M g2 , onde mi - massa total do subsistema i; Ni - número de partı́culas do subsistema i; M = mi /Ni - massa de cada partı́cula do sistema; gi ≡ Gi /mi - energia livre mássica de Gibbs do subsistema i, com unidades [gi ] = J Kg−1 (SI). A expressão anterior permite pôr em evidência a dependência funcional da energia livre de Gibbs no número de partı́culas de cada um dos estados do sistema28 G(T, p, N1 , N2 ) = G1 (T, p, N1 ) + G2 (T, p, N2 ) = N1 M g1 (T, p) + N2 M g2 (T, p) . O diferencial exacto de G, para uma transformação a pressão e temperatura constantes, escreve-se então ∂G ∂G dN1 + dN2 = M g1 dN1 + M g2 dN2 , dG = ∂N1 ∂N2 28 Na realidade G = G(T, p, N1 ), uma vez que N2 = N − N1 e N = conste (para um sistema S fechado). 132 e como N1 + N2 = N = conste ⇒ dN1 = −dN 2 , vem dG = M (g1 − g2 )dN1 . (8.1) Se o sistema se encontrar em equilı́brio entre os dois estados 1 e 2 dG = 0 ⇒ g1 (T, p) = g2 (T, p) . (8.2) Esta relação de igualdade entre as energias livre mássicas de Gibbs de dois estados em equilı́brio, conduz às leis p = p(T ) das diferentes curvas de sublimação, saturação e fusão. 8.3.1 Evolução de um sistema aberto a pressão e temperatura constantes Considere-se um sistema aberto (em repouso) que realiza uma transformação a pressão p e temperatura T constantes, correspondentes a uma evolução em equilı́brio mecânico e térmico com o exterior. O Primeiro Princı́pio da Termodinâmica permite escrever dU = δW + δQ δW = −pdV (equilı́brio mecânico com o exterior) ⇒ δQ = dU + pdV . O Segundo Princı́pio da Termodinâmica permite escrever ( dSUniverso = dS + dSex ≥ 0 −δQ (equilı́brio térmico com o exterior) dSex = T ⇒ δQ ≤ T dS . Combinando os resultados anteriores obtém-se dU + pdV − T dS ≤ 0 e como a transformação ocorre para p=conste e T =conste dU + d(pV ) − d(T S) = d[U + pV − T S] = dG ≤ 0 . 133 (8.3) Como o sistema é aberto, podendo trocar partı́culas com o exterior, o diferencial exacto da energia livre de Gibbs escreve-se (ver capı́tulo 7) X dG = −SdT + V dp + µi dNi ≤ 0 , i e para uma transformação a p=conste e T =conste X dG = µi dNi ≤ 0 . (8.4) i A situação de equilı́brio, correspondente ao final da evolução do sistema, ocorre quando dS = 0 (S máximo) dG = 0 [G mı́nimo, ver equação (8.4)] . A energia livre de Gibbs desempenha assim o papel de uma energia potencial termodinâmica, a qual permite estudar o sentido da evolução de um sistema durante uma mudança de estado. No caso de um sistema fechado S, constituı́do por dois subsistemas abertos S1 e S2 (os quais trocam partı́culas entre si), a condição de evolução escreve-se [ver equação (8.4)] dG = µ1 dN1 + µ2 dN2 ≤ 0 , e como N1 + N2 = N = conste ⇒ dN1 = −dN 2 , vem dG = (µ1 − µ2 )dN1 ≤ 0 . A verificação da condição anterior permite estabelecer um sentido de evolução da transformação, dependente da relação de ordem entre os potenciais quı́micos. Tem-se assim que µ1 > µ2 ⇒ dN1 < 0 (diminui o número de partı́culas de S1 ) (mudança de estado 1 → 2) µ < µ ⇒ dN > 0 (aumenta o número de partı́culas de S1 ) 1 2 1 (mudança de estado 2 → 1), concluindo-se que as partı́culas do sistema migram no sentido do subsistema com menor potencial quı́mico. 134 A condição de equilı́brio corresponde naturalmente à igualdade dos potenciais quı́micos dG = 0 ⇒ µ1 = µ2 . Os resultados anteriores podem ser reescritos em termos das energias livres mássicas de Gibbs, combinando as equações (8.1) e (8.3) para obter dG = M (g1 − g2 )dN1 ≤ 0 . À semelhança do que se fez anteriormente tem-se g1 > g2 ⇒ dN1 < 0 (mudança de estado 1 → 2) g1 < g2 ⇒ dN1 > 0 (mudança de estado 2 → 1), concluindo-se que o subsistema mais estável é aquele que possui uma menor energia livre mássica de Gibbs. Além disso, confirma-se que a condição de equilı́brio corresponde à igualdade das energias livres mássicas de Gibbs dG = 0 ⇒ g1 = g2 . 8.3.2 Mudanças de estado de primeira ordem Como se viu, a condição de equilı́brio entre dois estados 1 e 2 de um sistema é dada pela equação (8.2) g1 (T, p) = g2 (T, p) , a qual corresponde à continuidade da energia mássica de Gibbs. Neste capı́tulo estudaremos apenas mudanças de estado de primeira ordem, caracterizadas por uma descontinuidade das primeiras derivadas da energia livre mássica de Gibbs29 : ∂g ∂g e . ∂T p ∂p T Recorde-se que (ver capı́tulo 7) ∂G ∂g = −S ⇒ = −s ∂T p ∂T p ∂G ∂g =V ⇒ =v , ∂p T ∂p T 29 As mudanças de estado de ordem superior caracterizam-se por uma continuidade das primeiras derivadas da energia livre mássica de Gibbs. 135 onde s representa a entropia mássica e v o volume especı́fico do sistema. A evolução, em função da temperatura, da energia livre mássica de Gibbs de um sistema e da sua entropia mássica, durante uma mudança de estado de primeira ordem, podem representar-se esquematicamente tal como se faz na figura 8.3, a qual ilustra a continuidade de g e a descontinuidade da sua derivada em ordem a T . Figure 8.3: Evolução esquemática de g e s numa mudança de estado de primeira ordem Em geral, numa mudança de estado, ocorrem também descontinuidades nas derivadas de ordem superior da energia livre de Gibbs (ver capı́tulo 7): 2 ∂S ∂ G cp = T = −T ∂T p ∂T 2 p 1 ∂2G 1 ∂V k = − =− V ∂p T V ∂p2 2 T 1 ∂V 1 ∂ G β = = . V ∂T p V ∂T ∂p p,T Em conclusão, uma mudança de estado de primeira ordem está associada a uma descontinuidade das seguintes variáveis termodinâmicas do sistema: • Entropia, S • Volume, V • Capacidade calorı́fica a pressão constante, cp • Coeficiente de compressibilidade isotérmica, k • Coeficiente de expansão volúmica, β. 136 8.3.3 A equação de Clausius-Clapeyron Viu-se anteriormente que o lugar geométrico dos pontos de coordenadas (p,T ), que obedecem à equação (8.2) g1 (T, p) = g2 (T, p) , representa uma curva de equilı́brio entre estados, ao longo da qual os estados 1 e 2 podem coexistir em equilı́brio. Como se vê na figura 8.4, a linha g1 = g2 Figure 8.4: Curva de equilı́brio entre os estados 1 e 2 de um sistema divide o plano (p, T ) em duas regiões: a região onde o estado 1 é mais estável (caracterizada pela condição g1 < g2 ), e a região onde o estado 2 é mais estável (caracterizada pela condição g2 < g1 ). A equação (diferencial) que descreve a linha g1 = g2 , de equilı́brio entre estados, pode ser obtida escrevendo as condições de equilı́brio da energia livre mássica para dois pontos A e B dessa linha, infinitesimalmente próximos. Para o ponto A(T, p) tem-se g1 (T, p) = g2 (T, p) , (8.5) enquanto que para o ponto B(T + dT, p + dp) se verifica g1 (T + dT, p + dp) = g2 (T + dT, p + dp) . Como, por outro lado, g1 (T + dT, p + dp) = g1 (T, p) + dg1 g2 (T + dt, p + dp) = g2 (T, p) + dg2 137 , (8.6) (8.7) conclui-se, das equações (8.5)-(8.7), que dg1 = dg2 . Ora dg = ∂g ∂T dT + p ∂g ∂p (8.8) dp = −sdT + vdp , (8.9) T e portanto, conjugando as equações (8.8) e (8.9), pode escrever-se dg1 = dg2 ⇒ −s1 dT + v1 dp = −s2 dT + v2 dp , ou ainda dp s2 − s1 ∆s12 ∆S12 = = = . dT v2 − v1 ∆v12 ∆V12 (8.10) A condição (8.10) designa-se habitualmente por equação de ClausiusClapeyron. Esta equação relaciona o declive da curva de equilı́brio entre estados no ponto A com as variações de entropia e volume de uma substância que ”cruza a curva” nesse ponto, isto é, de uma substância que muda de estado à temperatura e pressão de A. Como (ver capı́tulo 7) dH = T dS + V dp , conclui-se que a entalpia de mudança de estado entre 1 e 2, a p e T constantes, é dada por ∆H12 = T ∆S12 . (8.11) Combinando (8.10) com (8.11), obtém-se a seguinte forma alternativa para a equação de Clausius-Clapeyron dp ∆H12 = . dT T ∆V12 (8.12) A entalpia de mudança de estado pode também relacionar-se com o calor latente (mássico) necessário para provocar, de forma reversı́vel, a transição entre os estados 1 e 2 de uma unidade massa do sistema λ12 = Qrev T ∆S12 ∆H12 12 = = , m m m onde m = m1 + m2 representa a massa total do sistema. 138 (8.13) A equação de Clausius-Clayperon pode finalmente escrever-se na sua forma mais usual, combinando (8.12) com (8.13) mλ12 dp = . dT T ∆V12 (8.14) Aplicaremos agora a equação de Clausius-Clapeyron ao estudo mais detalhado das curvas de saturação e de fusão de um sistema. a) Curva de saturação Conforme foi anteriormente referido, a curva de saturação de um sistema é a linha de equilı́brio entre os estados lı́quido e gasoso desse sistema, a qual tem origem no seu ponto triplo Y terminando no seu ponto crı́tico C. Como se tem: Vgás > Vlı́quido ⇒ ∆Vlg > 0 Sgás > Slı́quido ⇒ ∆Hlg > 0 , conclui-se que dp >0 , dT lg o que equivale a dizer que o declive da curva de saturação é sempre positivo. Este facto é facilmente demonstrado através de alguns exemplos da vida quotidiana. • Os alimentos cozem mais depressa numa panela de pressão, porque a temperatura de ebulição da água que os constitui aumenta monotonamente com a pressão no interior da panela. • É possı́vel provocar a ebulição de água a uma temperatura inferior a 1000 C. Para tal, encha-se um balão fechado com água lı́quida a < uma temperatura T ∼ 1000 C, em equilı́brio com o seu vapor. Se se provocar a condensação de parte do vapor de água que existe no interior do balão, colocando sobre este um pano frio molhado, a diminuição da tensão de vapor que daı́ resulta faz com que a água comece a ferver (a uma temperatura inferior a 1000 C). 139 É possı́vel obter uma expressão analı́tica para a curva de saturação, realizando várias aproximações sobre a equação de Clausius-Clapeyron (8.14): • Desprezar o volume do estado lı́quido face ao do estado gasoso, Vl Vg ; • Admitir que o gás é perfeito, isto é que obedece à equação de estado pVg = nRT ; • Supôr que a entalpia de mudança de estado obedece à lei ∆Hlg = mλlg − B(T − 373) ≡ mh0 − BT , com h0 ≡ λlg + 373B . m Quando se adoptam as aproximações anteriores, a equação (8.14) escreve-se dp mh0 − BT dp mh0 B ' ⇒ = dT − nRT dT lg p nRT 2 nRT T p e finalmente ln p = − B mh0 − ln T + conste . nRT nR A expressão anterior pode ser genericamente escrita como log p C2 = C1 − − C3 log T , p0 T e designa-se habitualmente por fórmula de Dupré-Bertrand. Nesta expressão, p0 = 1 bar, log representa o logaritmo decimal e Ci (i = 1 − 3) são constantes que se podem ajustar empiricamente. Para a água, no intervalo de temperaturas T [273, 473] K, obtem-se (para T em K) C1 = 17, 443 C2 = 2795 (SI) C3 = 3, 868 (SI) . 140 b) Curva de fusão Conforme foi anteriormente referido, a curva de fusão de um sistema é a linha de equilı́brio entre os estados sólido e lı́quido desse sistema, a qual tem origem no seu ponto triplo Y não tendo limite superior. Para esta mudança de estado, tem-se sempre Slı́quido > Ssólido ⇒ ∆Hsl > 0 . Por outro lado, a fusão é acompanhada de uma dilatação para a maioria das substâncias, pelo que Vlı́quido > Vsólido ⇒ ∆Vsl > 0 , concluindo-se que essas substâncias têm uma curva de fusão com declive positivo, isto é dp >0 . dT sl No entanto, para a água, o bismuto, o antimónio, o germânio e o silı́cio a fusão é acompanhada de uma contracção, isto é Vlı́quido < Vsólido ⇒ ∆Vsl < 0 , concluindo-se que dp <0 , dT sl o que equivale a dizer que estas substâncias têm uma curva de fusão com declive negativo (ver figura 8.5). Analisemos o caso particular da água, que tem ponto crı́tico com coordenadas TC = 374 0 C pC = 218 atm , e ponto triplo com coordenadas TY = 0, 01 0 C pY = 613 Pa . 141 Figure 8.5: Diagrama do ponto triplo para substâncias semelhantes à água É sabido que, em geral, a fusão de uma dada substância é acompanhada de uma dilatação (aumento de volume), isto é de uma diminuição da sua densidade. Deste modo, os sólidos são em geral mais densos que os lı́quidos. Tal é fácil de compreender se se pensar que a energia fornecida ao aquecer um sólido vai servir para quebrar as suas ligações intermoleculares, dando mais liberdade de movimento às moléculas que o constituem. No entanto, a água comporta-se de forma diferente! A temperaturas bastante acima do ponto de fusão, a água lı́quida comporta-se como um ”lı́quido normal” cuja densidade aumenta com a diminuição de temperatura. No entanto, para temperaturas mais próximas da do seu ponto de fusão, a densidade da água passa por um máximo (na vizinhança dos 40 C), e a partir daı́ decresce à medida que a temperatura diminui (ver figura 8.6). A densidade volta a diminuir após a solidificação da água lı́quida: a densidade do gelo é 917, 0 Kg m−3 e a da água lı́quida é 999, 8 Kg m−3 . Este comportamento da água tem a ver com a estrutura hexagonal muito aberta do gelo, associada a uma ligação covalente dipolar designada por pontes de hidrogénio, a qual conduz a menores densidades para o gelo. Depois da fusão, a água lı́quida mantém a ”memória” dessa estrutura menos densa até 4o C, temperatura a partir da qual o seu comportamento passa a ser o de um ”lı́quido normal”. São bem conhecidas várias consequências desta propriedade da água: • A água, ao congelar, pode fazer rebentar canalizações ou uma 142 Figure 8.6: Densidade da água em função da sua temperatura garrafa fechada no congelador do frigorı́fico. • O gelo funde se se aumentar a pressão realizada sobre ele. A zona fundida volta a solidificar, desde que se diminuam as forças exercidas sobre o sistema (soldadura autogénica). • Os cubos de gelo flutuam dentro de um copo com água lı́quida. Este último fenómeno é muito importante do ponto de vista da biologia aquática, estando na base da existência de vida marı́tima nos pólos. Nessas regiões frias a temperatura do ar provoca um arrefecimento da água superfı́cial que, ao atingir 40 C, fica mais densa descendo para regiões mais profundas. Assim, quando a água superficial congela (tendo menor densidade), existe sempre água lı́quida (mais densa e a uma temperatura ligeiramente superior) nas zonas mais profundas do oceano, o que assegura a manutenção de vida. 143 8.4 Diagrama (p, V , T ) das mudanças de estado Se representarmos o estado de um sistema puro através de um ponto no espaço (p, V, T ) a três dimensões, obtém-se uma superfı́cie caracterı́stica das mudanças de estado: o chamado diagrama (p, V, T ). Figure 8.7: Diagrama (p,V ,T ) para um sistema genérico Este diagrama, esquematicamente representado na figura 8.7 para um sistema genérico, encontra-se dividido em várias regiões. • Regiões onde o sistema existe num único estado: Sólido (S), Lı́quido (L), Gasoso (G) ou Fluido (F). A região F ocorre acima da chamada isotérmica crı́tica, a qual passa pelo ponto crı́tico C. • Regiões de equilı́brio entre distintos estados do sistema: S+L, L+G e S+G. As superfı́cies dessas regiões foram construı́das através de um conjunto de rectas paralelas ao eixo dos V , traduzindo condições p =conste e T =conste , tı́picas das mudanças de estado. 144 Estas três regiões têm uma fronteira comum: a chamada linha tripla, ao longo da qual coexistem em equilı́brio os três estados da matéria. A projecção da superfı́cie caracterı́stica (p, V , T ) no plano (p,T ) dá origem ao diagrama do ponto triplo, enquanto que as suas projecções no plano (p,V ) dão origem ao chamado diagrama de isotérmicas de Andrews. 8.4.1 Diagrama de isotérmicas de Andrews O diagrama de isotérmicas de Andrews, que se representa na figura 8.8 para a mudança de estado lı́quido-gás, é um gráfico p = p(V ) a T =conste . Figure 8.8: Diagrama de isotérmicas de Andrews para a transição lı́quido-gás Nesta figura • C representa o ponto crı́tico; • a linha T = TC representa a isotérmica crı́tica; • a linha a traço interrompido representa a curva de saturação do sistema. As isotérmicas e a curva de saturação do sistema definem várias regiões no diagrama, a saber: • região Fluido: acima da isotérmica T = TC ; • região Lı́quido: abaixo da isotérmica T = TC e à esquerda da curva de saturação; 145 • região Gás: abaixo da isotérmica T = TC e à direita da curva de saturação. • região Lı́quido + Gás: debaixo da curva de saturação. Note-se que, nessa zona de mudança de estado, as isotérmicas são também isobáricas. 8.4.2 Diagrama de isobáricas (T , S) A figura 8.9 representa um diagrama T = T (S) a p =conste , para a mudança de estado lı́quido-gás. Figure 8.9: Diagrama de isobáricas (T , S) para a transição lı́quido-gás Nesta figura • C representa o ponto crı́tico; • a linha p = pC representa a isobárica crı́tica; • a linha a traço interrompido representa a curva de saturação do sistema. Note-se que em geral Cp,lı́quido > Cp,gás , o que justifica os menores declives das isobáricas na zona lı́quido30 . Note-se ainda que, na zona de mudança de estado debaixo da curva de saturação, as isobáricas são também isotérmicas. 30 Recorde-se que dS ' nCp dT ⇒ T ∝ exp T 146 S Cp . 8.5 Grandezas extensivas de um sistema com dois estados em equı́libro Considere-se um sistema puro, constituı́do por dois estados (1 e 2) em equilı́brio. Admitamos que se provoca uma mudança de estado entre 1 e 2, que se inicia com uma massa m do sistema no estado 1, caracterizado pelas grandezas extensivas V1 , U1 , H1 , S1 , etc, a qual vai sendo gradualmente transferida para o estado 2, caracterizado pelas grandezas extensivas V2 , U2 , H2 , S2 , etc. O valor médio de qualquer grandeza extensiva do sistema será obtida a partir de uma soma, ponderada pelas massas, das respectivas grandezas extensivas mássicas de cada um dos estados do sistema. Genericamente B = m1 b1 + m2 b2 = (m − m2 )b1 + m2 b2 , (8.15) onde B representa uma grandeza extensiva genérica do sistema e bi (i = 1, 2) é a correspondente grandeza mássica para o estado i de massa mi . Note-se que m = m1 + m2 . A equação (8.15) pode escrever-se em termos mássicos como b = x1 b1 + x2 b2 = (1 − x2 )b1 + x2 b2 , (8.16) onde xi ≡ mi /m (i = 1, 2) representa a fracção mássica do sistema que se encontra no estado i. A equação (8.16) pode ser usada no cálculo do diferencial exacto de b db = x1 db1 + x2 db2 + b1 dx1 + b2 dx2 = x1 db1 + x2 db2 + (b2 − b1 )dx2 = x1 db1 + x2 db2 + ∆b12 dx2 , (8.17) onde as três parcelas da última expressão representam, respectivamente, a variação de b devido ao estado 1, a variação de b devido ao estado 2 e a variação de b devido à mudança de estado 1-2. Note-se que se a transformação se realizar a T e p constantes, então as grandezas mássicas de cada estado individual não variam, podendo-se escrever db = ∆b12 dx2 . (8.18) 147 A equação (8.17) pode também escrever-se usando apenas a fracção mássica x2 , como db = = = = (1 − x2 )db1 + x2 db2 + ∆b12 dx2 db1 + x2 d(b2 − b1 ) + ∆b12 dx2 db1 + x2 d(∆b12 ) + ∆b12 dx2 db1 + d(x2 ∆b12 ) . 148 (8.19) 8.6 Capacidades calorı́ficas numa mudança de estado A equação geral de definição de uma capacidade calorı́fica tem a forma rev δQ cx ≡ , ∂T x onde x representa qualquer parâmetro que seja mantido constante ao longo do caminho reversı́vel utilizado na definição da capacidade calorı́fica. Nesta secção pretende definir-se uma capacidade calorı́fica ao longo de uma curva de mudança de estado (por exemplo, a curva de saturação de mudança de estado lı́quido-gás31 ), a qual representaremos genericamente por rev δQ csat ≡ . (8.20) dT sat Dado que ocorrem variações quer de pressão, quer de temperatura, quer de volume ao longo de uma curva de equilı́brio entre estados, é imediato concluir que csat 6= cV = ∂U ∂T V csat 6= cp = ∂H , ∂T p muito embora seja possı́vel relacionar estas quantidades entre si. 8.6.1 Relação entre csat e cV Consideremos a entropia mássica de um sistema, s = s(T, v), constituı́do por dois estados (1 e 2) em equilı́brio. Tem-se ∂s ∂s ds = dT + dv ∂T v ∂v T e portanto, ao longo da curva de equilı́brio entre 1 e 2, ds ∂s ∂s dv = + dT sat ∂T v ∂v T dT sat . (8.21) Como (ver capı́tulo 7) cV ∂s = mT ∂T v ∂p β ∂s = =α= , ∂v T ∂T v k 31 O estudo aqui realizado é obviamente válido para qualquer outra mudança de estado. 149 onde m é a massa total do sistema, então csat ds cV βT dv ≡T = + m dT sat m k dT sat . (8.22) Por outro lado, pode escrever-se para v(T, p) [cf. equação (8.21)] dv ∂v ∂v dp = + , (8.23) dT sat ∂T p ∂p T dT sat e como (ver capı́tulo 7) ∂v = βv ∂T p ∂v = −kv , ∂p T então dv dT = βv − kv sat dp dT dp dT . (8.24) sat Substituindo (8.24) em (8.22) tem-se csat cV β 2 vT = + − βvT m m k . (8.25) sat Note-se que, na equação (8.25), (dp/dT )sat representa o declive da curva p = p(T ) de equilı́brio entre os estados 1 e 2, dado pela equação de ClausiusClapeyron (8.12). 8.6.2 Relação entre csat e (du/dT )sat A equação (8.25) pode ser escrita usando-se a relação existente entre a capacidade calorı́fica a volume constante cV e a energia interna mássica u(T, v). Por um lado tem-se [cf. equação (8.21)] du ∂u ∂u dv = + , (8.26) dT sat ∂T v ∂v T dT sat e como (ver capı́tulo 7) ∂u = cV m ∂T v ∂p βT ∂u =T −p= −p , ∂v T ∂T v k 150 vem [cf. equação (8.22)] du cV βT dv = + −p dT sat m k dT sat dv csat , = −p m dT sat ou seja csat = m 8.6.3 du dT +p sat dv dT . (8.27) sat Relação entre csat e cp A equação (8.25) fornece uma relação entre csat e cV , a qual pode ser conjugada com a condição (ver capı́tulo 7) cp − cV = β 2V T β 2 vT = m k k para obter uma relação entre csat e cp csat cp = − βvT m m 8.6.4 dp dT . (8.28) sat Relação entre csat e (dh/dT )sat A equação (8.28) pode ser escrita usando-se a relação existente entre a capacidade calorı́fica a pressão constante cp e a entalpia mássica h(T, p). Por um lado tem-se [cf. equação (8.21)] dh ∂h ∂h dp = + , (8.29) dT sat ∂T p ∂p T dT sat e como (ver capı́tulo 7) c ∂h = mp ∂T p ∂h = −T ∂v + v = −βvT + v , ∂p T ∂T p 151 vem [cf. equação (8.28)] dh cp dp = + [−βvT + v] dT sat m dT sat dp csat , = +v m dT sat ou seja csat = m dh dT −v sat dp dT . (8.30) sat Note-se que a equação (8.30) poderia ter sido directamente obtida a partir de (8.27), utilizando a relação h = u + pv, entre a energia interna e a entalpia mássicas, e derivando-a em ordem a T ao longo da curva de equilı́brio entre 1 e 2. 8.6.5 Relação entre csat e as capacidades calorı́ficas c1 e c2 Nesta secção procura-se obter uma relação entre a capacidade calorı́fica csat do sistema e as capacidades calorı́ficas c1 e c2 de cada um dos seus estados saturados 1 e 2, isto é as capacidades calorı́ficas de cada um dos estados 1 e 2 em equilı́brio a uma pressão p e temperatura T , sobre a curva de saturação (ver figura 8.10). Figure 8.10: Estados saturados de um sistema lı́quido-gás 152 Estas capacidades calorı́ficas definem-se como [ver equações (8.20) e (8.22)] rev δQ dS ds =T = mT (8.31) csat ≡ dT sat dT sat dT sat rev ds δQ = mT (8.32) c1 ≡ dT 1 dT 1 rev ds δQ c2 ≡ = mT . (8.33) dT 2 dT 2 Fazendo uso das relações (8.31)-(8.33) na equação (8.17), aplicada à entropia mássica ds = x1 ds1 + x2 ds2 + ∆s12 dx2 , obtém-se csat = x1 c1 + x2 c2 + ∆s12 8.6.6 dx2 mT . dT (8.34) Relação entre csat e a entalpia de mudança de estado A relação entre as variações de entropia e entalpia, numa mudança de estado a p e T constantes, pode ser facilmente obtida recordando que (ver capı́tulo 7) dh = T ds + vdp ⇒ (dh)T,p = T (ds)T,p , donde se obtém ∆h12 . (8.35) T As relações (8.31), (8.32) e (8.35) podem agora ser usadas na equação (8.19), aplicada à entropia mássica ∆s12 = ds = ds1 + d [x2 ∆s12 ] , obtendo-se d [x2 (∆h12 /T )] dT d [x2 ∆h12 ] ∆h12 = c1 + m − mx2 . dT T csat = c1 + mT 153 (8.36) 8.6.7 Calor elementar trocado numa mudança de estado A equação (8.34) pode ser utilizada para calcular o calor elementar δQ, trocado durante uma mudança de estado. Com efeito, a partir de (8.34) pode escrever-se csat dT = x1 c1 dT + x2 c2 dT + mT ∆s12 dx2 dT , dT (8.37) ou seja δQ = δQ1 + δQ2 + δQ12 , onde δQ1 ≡ x1 c1 dT representa o calor elementar utilizado no aquecimento / arrefecimento do estado 1; δQ2 ≡ x2 c2 dT representa o calor elementar utilizado no aquecimento / arrefecimento do estado 2; δQ12 ≡ mT ∆s12 dx2 = m∆h12 dx2 = mλ12 dx2 representa o calor elementar utilizado na transição 1-2. 8.6.8 Capacidades calorı́ficas de gases e lı́quidos saturados A equação (8.28) pode escrever-se para a mudança de estado lı́quido-gás csat cp dp = − βvT , m m dT sat e usando a equação de Clausius-Clapeyron (8.12) csat cp ∆hlg = − βvT m m T ∆vlg ou seja csat = cp − βm v v ∆hlg ' cp − βm ∆hlg , vg − vl vg pois em geral tem-se vg vl . 154 • No caso de um gás (perfeito) saturado (ver capı́tulo 7) 1 1 ∂v β= = , v ∂T p T tendo-se cg = cp − m ∆hlg . T (8.38) Apliquemos este resultado ao vapor de água a T ' 1000 C, para o qual ( cp −1 −1 m = 1, 890 kJ K kg ∆hlg −1 −1 , T = 6, 05 kJ K kg pelo que cp ∆hlg < ⇒ cg < 0 . m T Este resultado é surpreendente: a capacidade calorı́fica do vapor de água saturado é negativa (!), isto é o aumento da temperatura do vapor deve ser acompanhado de uma extracção de calor, a fim de manter o equilı́brio entre estados sobre a curva de saturação lı́quidogás, garantindo o aumento simultâneo de pressão que acompanha o aumento de temperatura sobre essa curva. A explicação é que tanto T como p variam ao longo da curva de saturação, e ambos afectam a entropia. Um aumento da temperatura faz aumentar a entropia, enquanto o aumento simultâneo de pressão faz diminuir a entropia. Quando este último efeito se sobrepõe ao primeiro, a capacidade calorı́fica torna-se negativa. Por outras palavras, a libertação de energia térmica que acompanha o processo de transição gás-lı́quido (m∆hlg /T ) é superior à energia consumida na elevação de temperatura do vapor saturado (cp ), para uma variação T = T (p) sobre a curva de saturação. Este resultado não é geral, e depende do substância considerada. Existem sistemas para os quais cg é positivo (por exemplo o benzeno), ou mesmo nulo (caso de alguns fréons). • No caso de um lı́quido saturado 1 ∂v β= '0 , v ∂T p 155 tendo-se [ver também equações (8.25) e (8.28)] cl ' cp ' cv . (8.39) No caso da água lı́quida a T ' 1000 C, cl ' 4, 220 kJ K−1 kg−1 . m 156 (8.40)
Download