TESE DE DOUTORADO N° 155
DESENVOLVIMENTO DE COMPENSADOR SÉRIE PARA
MITIGAÇÃO HARMÔNICA DISTRIBUÍDA E CORREÇÃO DINÂMICA
DE FATOR DE POTÊNCIA
Gleisson Jardim França
DATA DA DEFESA: 28/02/2013
Universidade Federal de Minas Gerais
Escola de Engenharia
Programa de Pós-Graduação em Engenharia Elétrica
DESENVOLVIMENTO DE COMPENSADOR SÉRIE PARA MITIGAÇÃO
HARMÔNICA DISTRIBUÍDA E CORREÇÃO DINÂMICA
DE FATOR DE POTÊNCIA
Gleisson Jardim França
Tese de Doutorado submetida à Banca Examinadora
designada pelo Colegiado do Programa de PósGraduação em Engenharia Elétrica da Escola de
Engenharia da Universidade Federal de Minas Gerais,
como requisito para obtenção do Título de Doutor em
Engenharia Elétrica.
Orientador: Professor Braz de Jesus Cardoso Filho, PhD.
Belo Horizonte
Escola de Engenharia da UFMG
Março, 2013
Dedico
este
trabalho
à
minha
família
e
especialmente à minha filha Vitória por preencher
minha vida com alegria, mostrando nos momentos
difíceis o que é realmente importante.
Agradecimentos
Agradeço àqueles que me apoiaram na escalada para esta conquista:
•
Meus pais, Aderaldo e Ilda, pela dedicação, afeto e confiança.
•
Minha filha Vitória e minha esposa Horádia que foram cruciais para me motivar nos
momentos difíceis;
•
Meu irmão Dionison pela amizade, incentivo e inspiração;
•
Ao prof. Braz pela orientação e principalmente confiança;
•
Aos engenheiros Flávio Rezende Garcia e Marcelo Lemes, da empresa IESA, pelas
valiosas informações, que ajudaram a viabilizar o desenvolvimento do trabalho;
•
À FAPEMIG pelo financiamento da pesquisa;
•
Ao aluno Clóvis Fritzen do Centro Universitário Católica de Santa Catarina por sua
contribuição ao desenvolvimento do trabalho.
Resumo
O avanço das aplicações da eletrônica de potência, impulsionado pelos crescentes
avanços da tecnologia de dispositivos semicondutores, vem aumentando significativamente a
quantidade de cargas não-lineares no sistema elétrico, tais como inversores de freqüência,
softstarters, fornos a arco, máquinas de solda, etc. Consecutivamente, a garantia da
confiabilidade dos sistemas elétricos passa a exigir cuidados especiais com a distorção
harmônica da tensão e corrente. As soluções normalmente utilizadas para a mitigação
harmônica passam por alternativas passivas, que utilizam apenas indutores, capacitores e
resistores em sua construção, alternativas ativas, as quais utilizam filtros ativos série e /ou
paralelo, cujo elemento fundamental é um conversor CC/CA controlado e, finalmente,
soluções híbridas que são uma combinação das soluções ativas e passivas. As principais
dificuldades na aplicação dos filtros passivos são a reduzida flexibilidade e o desempenho
fortemente dependente da configuração das cargas no sistema, enquanto que a principal
dificuldade para a aplicação dos filtros ativos e híbridos tem sido o custo de implementação,
especialmente crítico para sistemas com altos valores de corrente e/ou tensão de operação.
Reconhecendo o fato de que é necessário apenas reduzir o conteúdo harmônico dos sistemas
elétricos para valores dentro dos níveis de compatibilidade dos equipamentos que
compartilham o sistema, e não necessariamente o total cancelamento dos harmônicos, este
trabalho apresenta o desenvolvimento de um compensador série com a propriedade de inserir
impedâncias no sistema elétrico. Essas impedâncias são inseridas apenas na(s) freqüência(s)
de interesse e podem ser utilizadas, por exemplo, para a dessintonia ativa de bancos de
capacitores, bem como para o controle do fluxo de harmônicos, direcionando os harmônicos
de corrente para um caminho elétrico que não cause danos aos componentes do sistema. A
utilização de transformadores coaxiais, no qual o secundário é formado pelo próprio cabo que
faz a conexão do sistema elétrico (enrolamento de apenas uma espira), para a inserção das
impedâncias harmônicas ativas, confere ao sistema proposto uma grande flexibilidade de
aplicação, facilitando sobremaneira a avaliação da aplicação em plantas existentes,
dispensando e/ou minimizando o tempo de parada para a implementação da solução de
filtragem.
Abstract
The advance of power electronic applications, stimulated by increasing advances on
semiconductor devices technologies, has significantly increased the presence of non-linear
loads on electric systems, such as frequency inverters, soft-starters, arc furnaces, welding
machines, etc. The increase of non-linear loads introduces additional characteristics to the
electric power system in such a way that its trustworthiness begins to demand a special care
with current and voltage harmonic distortions generated from this kind of loads. The solutions
normally utilized for harmonic mitigation passes from passive alternatives, which utilizes
only inductors, capacitors and resistors in its construction, active alternatives, which utilizes
series and/or parallel active filters where the main structure is composed by a controlled
DC/AC converter (inverter) and, finally, hybrid solutions that are a composition of active and
passive alternatives. The main difficulties of the passive solutions are the reduced flexibility
and performance strongly dependent of system impedance and load configuration, while the
main difficulty of active and hybrid solutions application is the implementation cost, manly in
high currents and/or voltages systems. Recognizing the fact that it is only necessary to reduce
the harmonic content of the electric systems to the compatibility levels of the equipment that
shares it, and not completely eliminates the harmonic content, this work presents the
developing of an active harmonic impedance system with the property that it inserts, on a
selective way, specific series impedances in the electric system. The impedances are inserted
only at specific frequency(ies) and can be utilized, for example, to active detune capacitor
banks and to control de harmonic flow, with the objective of direct current harmonics to an
electric way that don’t cause damage to the system components. The utilization of coaxial
transformers, where the secondary side is composed only by the power system cable (one turn
secondary), for insertion of the harmonic active impedances, gives a significant flexibility to
its application, allowing an easy evaluation of application in existing systems, excusing or
minimizing the downtime for solution implementation.
viii
Sumário
Lista de Figuras...................................................................................................................... 11
Lista de Tabelas...................................................................................................................... 16
Lista de Símbolos e Abreviações........................................................................................... 17
1. Introdução........................................................................................................................... 23
1.1.
Relevância................................................................................................................ 23
1.2.
Objetivos .................................................................................................................. 27
1.3.
Proposta de Trabalho ............................................................................................... 27
1.4.
Contribuições ........................................................................................................... 28
1.5.
Organização do Texto .............................................................................................. 29
2. Harmônicos – Recomendações e Soluções para Mitigação. ........................................... 31
2.1.
Introdução ................................................................................................................ 31
2.2.
Principais Recomendações sobre Harmônicos ........................................................ 31
2.2.1.
Recomendações Direcionadas a Sistemas............................................................ 32
2.2.2.
Recomendações Direcionadas para Equipamentos.............................................. 36
2.3.
Soluções para a Mitigação de Harmônicos .............................................................. 38
2.3.1.
Filtros Passivos .................................................................................................... 38
2.3.2.
Filtros Ativos........................................................................................................ 39
2.3.2.1.
Filtros Ativos Paralelos.................................................................................... 40
2.3.2.2.
Filtros Ativos Série .......................................................................................... 42
2.3.2.3.
Principais Estratégias para a Obtenção dos Sinais de Compensação para os
Filtros Ativos..................................................................................................................... 44
2.3.2.4.
2.4.
Filtros Híbridos ................................................................................................ 48
Bancos de Capacitores para Correção de Fator de Potência e Harmônicos............. 51
2.4.1.
Tecnologias .......................................................................................................... 51
2.4.2.
Considerações de Custo Relacionadas à Correção de Fator de Potência na
Presença de Harmônicos ................................................................................................... 52
2.4.3.
Compensação Harmônica Série-Paralela Distribuída .......................................... 54
2.5.
Filtros Ativos Comerciais no Brasil......................................................................... 55
2.6.
Conclusão................................................................................................................. 61
3. Impedâncias Harmônicas Ativas ...................................................................................... 63
3.1.
Introdução ................................................................................................................ 63
ix
3.2.
Concepção do Sistema.............................................................................................. 63
3.3.
Implementação dos Algoritmos PLL (Phase Locked Loop) .................................... 66
3.3.1.
PLL para o Rastreamento da Componente Fundamental ..................................... 67
3.3.2.
PLL para o Rastreamento da Componente Harmônica ........................................ 70
3.4.
Implementação da Impedância Harmônica Ativa .................................................... 71
3.4.1.
Introdução de Amortecimento Ativo.................................................................... 73
3.4.2.
Compensação Simultânea de Harmônicos ........................................................... 74
3.5.
Controle do Barramento CC do conversor ............................................................... 75
3.6.
Considerações Básicas sobre o Conversor Estático ................................................. 78
3.4.3.
Capacitância do Barramento CC .......................................................................... 78
3.4.4.
Dimensionamento dos Dispositivos Semicondutores do Conversor.................... 79
3.7.
Transformador Coaxial............................................................................................. 80
3.7.1.
Projeto Básico – Abordagem Analítica ................................................................ 80
3.7.2.
Ensaios e Levantamento de Parâmetros de um Protótipo de Transformador
Coaxial 84
3.8.
Proteção Contra Curto-Circuito................................................................................ 92
3.9.
Extensão para Utilização de Compensador trifásico ................................................ 96
3.10.
Conclusão ................................................................................................................. 98
4. Simulações Computacionais e Resultados Práticos....................................................... 100
4.1.
Introdução............................................................................................................... 100
4.2.
Simulações do compensador monofásico............................................................... 101
4.2.1.
Simulações preliminares – harmônico implementado como fonte de corrente ideal
101
4.2.2.
Simulação com Introdução de Amortecimento Ativo ........................................ 107
4.2.3.
Simulação de Compensação de Distorção de Tensão na Rede de Alimentação 109
4.2.4.
Simulações utilizando retificador como carga não-linear .................................. 111
4.2.5.
Simulação com compensação Simultânea de 5° e 7° harmônicos ..................... 114
4.2.6.
Consideração Sobre a Efetividade da Solução em Função dos Parâmetros do
Sistema 119
4.2.7.
4.3.
4.3.7.
Simulação de sistema de compensação trifásico ................................................ 121
Resultados Experimentais ...................................................................................... 125
Descrição do setup de teste................................................................................. 125
x
4.3.8.
4.4.
Resultados .......................................................................................................... 126
Conclusão............................................................................................................... 130
5. Conclusões e Propostas de Continuidade ...................................................................... 131
5.1.
Conclusões ............................................................................................................. 131
5.2.
Propostas de continuidade...................................................................................... 132
Referências Biliográficas ..................................................................................................... 135
ANEXOS ............................................................................................................................... 143
A.1.
Harmônicos – Fontes e efeitos em equipamentos elétricos ................................... 143
A.1.1. Introdução .............................................................................................................. 143
A.1.2. Principais fontes de harmônicos ............................................................................ 143
Retificadores Não-Controlados ....................................................................................... 143
Retificadores Controlados ............................................................................................... 151
Dispositivos a Arco ......................................................................................................... 153
Dispositivos Saturáveis ................................................................................................... 155
A.1.3. Efeitos dos Harmônicos nos Principais Equipamentos Elétricos Industriais......... 157
Transformadores.............................................................................................................. 157
Motores............................................................................................................................ 158
Bancos de Capacitores..................................................................................................... 159
Equipamentos Eletrônicos............................................................................................... 162
Equipamento de Seccionamento e Proteção – Disjuntores, contatores, seccionadores e
fusíveis............................................................................................................................. 162
A.2.
Diagramas e códigos utilizados nas simulações. ................................................... 164
A.3.
Código C da implementação do controle do conversor na plataforma UPCC2812.
169
Lista de Figuras
Figura 2.1: Filtro passivo série para bloqueio de harmônicos.................................................. 38
Figura 2.2: Filtro passivo paralelo (shunt) para confinamento de harmônicos. ....................... 38
Figura 2.3: Esquema básico de funcionamento dos filtros ativos ............................................ 40
Figura 2.4: Filtros ativos série e paralelo ................................................................................. 41
Figura 2.5: Filtro ativo em um sistema de alimentação............................................................ 42
Figura 2.6: Filtros ativos série .................................................................................................. 42
Figura 2.7: Topologia típica dos filtros ativos série ................................................................. 43
Figura 2.8: Estratégias para obtenção dos sinais de referência para compensação harmônica.45
Figura 2.9: Filtros híbridos: ..................................................................................................... 49
Figura 2.10: Utilização da indutância de magnetização do transformador para síntese de
tensão harmônica de controle: implementação física e circuito equivalente.................... 50
Figura 2.11: Indutor mecanicamente variável proposto em [66]. ............................................ 51
Figura 2.12: Conceito de compensação harmônica série-paralela distribuída. ........................ 54
Figura 2.13: Linha PQFI de filtros ativos ABB ....................................................................... 57
Figura 2.14: Linha PQFM de filtros ativos ABB. .................................................................... 57
Figura 2.15: Filtro ativo StacoSine – STACO.......................................................................... 58
Figura 2.16: Linha AIM AHF – AIM Europe .......................................................................... 58
Figura 2.17: Filtros Ativos ECOsine (Bluewave) – Schaffner................................................. 59
Figura 2.18: Filtros Ativos AHF/VLT - Danfoss ..................................................................... 59
Figura 2.19: Filtros Ativos AccuSine – Schneider-Electric. .................................................... 60
Figura 2.20: Filtro Ativo AHF6000 – EPCOS ......................................................................... 60
Figura 2.21: Filtro Ativo MGETM SineWave – APC/Schneider-Electric............................... 60
Figura 2.22: Filtro Ativo FILTERON – RTA .......................................................................... 61
Figura 3.1: Sistema para implementação de uma impedância harmônica ativa monofásica. .. 64
Figura 3.2: Diagrama geral em blocos da implementação da impedância harmônica ativa. ... 65
Figura 3.3: Diagrama em blocos do algoritmo PLL (Phase Locked Loop) monofásico. ......... 67
Figura 3.4: Diagrama em blocos do algoritmo PLL (Phase Locked Loop) monofásico
linearizado em torno do ponto de operação Iq,Id e θ0. ...................................................... 68
Figura 3.5: Avaliação da rigidez dinâmica do algoritmo PLL (θ0 = π/4)................................. 69
12
Figura 3.6: Resposta do PLL aplicado para a estimação da componente fundamental de um
sinal composto por 1 pu de fundamental + 1.pu 5° harmônico + 0,1 p.u. de 7° harmônico.
.......................................................................................................................................... 70
Figura 3.7: Resposta do PLL aplicado para a estimação da componente harmônica. ............. 71
Figura 3.8: Referenciais utilizados para os cálculos das transformações de eixos. ................. 72
Figura 3.9: Diagrama de blocos para compensação simultânea de 5° e 7° harmônicos. ......... 75
Figura 3.10: Controle da tensão no barramento CC do conversor........................................... 76
Figura 3.11: Referências para análise do núcleo do transformador coaxial. ........................... 80
Figura 3.12: Seção do transformador axial com a introdução de entreferro............................ 82
Figura 3.13: Efeito da introdução de entreferro na corrente de magnetização do transformador
coaxial. ............................................................................................................................. 84
Figura 3.14: Protótipo de transformador coaxial utilizado para avaliação experimental. ....... 85
Figura 3.15: Circuito equivalente para o transformador coaxial no ensaio a vazio................. 85
Figura 3.16: Circuito equivalente para o transformador coaxial no ensaio em curto-circuito. 87
Figura 3.17: Resultados do ensaio do transformador coaxial com secundário aberto. ............ 88
Figura 3.18: Resultados do ensaio do transformador coaxial com secundário em curtocircuito. ............................................................................................................................ 89
Figura 3.19: Funcionamento do transformador coaxial. .......................................................... 90
Figura 3.20: Diagrama em blocos do circuito de proteção contra curto-circuito. ................... 93
Figura 3.21: Obtenção da curva de magnetização do transformador coaxial . ........................ 94
Figura 3.22: Circuito para teste preliminar da proteção........................................................... 95
Figura 3.23: Teste preliminar do circuito de proteção de curto circuito.................................. 95
Figura 3.24: Circuito equivalente para o transformador coaxial no ensaio em curto-circuito. 96
Figura 3.25: PLL utilizado para .a implementação trifásica do compensador harmônico série.
.......................................................................................................................................... 97
Figura 4.1: Sistema monofásico com banco automático de capacitores com dessintonia ativa.
........................................................................................................................................ 101
Figura 4.2: Sistema monofásico com banco automático de capacitores com dessintonia ativa.
........................................................................................................................................ 102
Figura 4.3: Correntes no banco de capacitores sem injeção de tensão harmônica (1 p.u. =
434A). ............................................................................................................................ 103
Figura 4.4: Correntes na fonte e na carga sem injeção de impedância harmônica. ............... 103
13
Figura 4.5: Correntes no banco de capacitores com injeção de tensão harmônica. ............... 104
Figura 4.6: Correntes na fonte e na carga com injeção de tensão harmônica......................... 104
Figura 4.7: Tensão no barramento CC, referência de tensão para controledo barramentoCC e
referência de tensão harmônica para o modulador PWM............................................... 105
Figura 4.8: Diagrama (Simulink®) simplificado para obtenção da tensão harmônica. ......... 106
Figura 4.9: Correntes no banco de capacitores utilizando o algoritmo da figura 4.8............. 106
Figura 4.10: Simulação considerando variação de -20% em L*. ........................................... 107
Figura 4.11: Correntes no banco de capacitores com a introdução de amortecimento ativo. 108
Figura 4.12: Tensão no barramento CC e referências de tensão de compensação com a
introdução de amortecimento ativo. ............................................................................... 108
Figura 4.13: Sistema utilizado para simulação de compensação de distorção de tensão. ...... 110
Figura 4.14: Resultado de simulação considerando compensação de distorção de tensão. ... 110
Figura 4.15: Sistema utilizado para simulação de compensação com carga retificadora....... 111
Figura 4.16: Resultado de simulação considerando compensação de distorção de tensão. ... 112
Figura 4.17: Espectro harmônico da corrente no banco de capacitores com retificador – sem
compensação harmônica................................................................................................. 112
Figura 4.18: Correntes no banco de capacitores com compensação ativada – carga retificador.
........................................................................................................................................ 113
Figura 4.19: Espectro das correntes no banco de capacitores com compensação ativada –
carga retificador.............................................................................................................. 114
Figura 4.20: Controladores PI utilizados para a geração da referência de indutância ativa... 115
Figura 4.21: Corrente no banco de capacitores e respectiva estimativa da componente
fundamental. ................................................................................................................... 116
Figura 4.22: Espectro harmônico da corrente no banco de capacitores. ................................ 116
Figura 4.23: Espectro harmônico do sinal de referência para compensação harmônica. ....... 117
Figura 4.24: Corrente no banco de capacitores e respectiva estimativa da componente
fundamental. ................................................................................................................... 118
Figura 4.25: Espectro corrente no banco de capacitores e respectiva estimativa da componente
fundamental. ................................................................................................................... 118
Figura 4.26: Correntes na carga e no conversor – compensação com medição apenas da
corrente do conversor. .................................................................................................... 119
Figura 4.27: Avaliação da influência da relação X/R na relação Ich/Ih................................... 120
14
Figura 4.28: Associação série de compensadores para o aumento da capacidade de
compensação harmônica. ............................................................................................... 120
Figura 4.29: Modelo de simulação do compensador trifásico no Simulink........................... 121
Figura 4.30: Modelo de simulação do compensador trifásico no Simulink –conversor +
transformador coaxial. ................................................................................................... 122
Figura 4.31: Correntes nas fases do banco de capacitores – sem compensação ativa. .......... 122
Figura 4.32: Corrente na fase A do banco de capacitores e estimativas das componentes
fundamental e de quinto harmônico – sem compensação.............................................. 123
Figura 4.33: Espectro harmônico da corrente na fase A do banco de capacitores................. 123
Figura 4.34: Corrente na fase A do banco de capacitores e estimativas das componentes
fundamental e de quinto harmônico – com compensação. ............................................ 124
Figura 4.35: Espectro harmônico da corrente na fase A do banco de capacitores - com
compensação. ................................................................................................................. 124
Figura 4.36: Diagrama da montagem realizada para obtenção dos resultados experimentais
preliminares.................................................................................................................... 126
Figura 4.37: Resultados experimentais obtidos sem a injeção de tensão harmônica............. 127
Figura 4.38: Espectro harmônico da corrente no capacitor sem a injeção de tensão harmônica.
........................................................................................................................................ 128
Figura 4.39: Resultados obtidos com a injeção de tensão no quinto harmônico. .................. 128
Figura 4.40: Espectro harmônico da corrente no capacitor com e sem a injeção de tensão
harmônica....................................................................................................................... 129
Figura A.1: Circuito básico de uma fonte chaveada [23]. ..................................................... 144
Figura A.2: Corrente de entrada (a) de uma fonte chaveada e respectivo espectro harmônico
(b) [23]. .......................................................................................................................... 145
Figura A.3: Estrutura básica de um retificado trifásico. ........................................................ 146
Figura A.4: Corrente de entrada de um retificador trifásico com reator de entrada de 3%. .. 146
Figura A.5: Espectro harmônico da corrente de entrada apresentada na figura A.4.............. 147
Figura A.6:Distorção harmônica de corrente (THDi) x reatância % do indutor de entrada .. 147
Figura A.7: Estrutura de um retificador de 12 pulsos (conexão série ou paralela de duas pontes
de 6 pulsos). ................................................................................................................... 149
Figura A.8: Esquema elétrico e respectivo diagrama fasorial de um transformador
Delta/Delta-Estrela para a alimentação de um retificador trifásico de 12 pulsos. ......... 149
15
Figura A.9: Forma de onda típica da corrente de entrada de um conversor 12 pulsos........... 149
Figura A.10: Espectro harmônico típico da corrente de entrada (medição no primário do
transformador) de um retificador 12 pulsos. .................................................................. 150
Figura A.11: Acionamento de máquina CC por retificador controlado. ................................ 151
Figura A.12: Espectro harmônico da corrente de entrada de um retificador controlado........ 152
Figura A.13:Circuito equivalente de um dispositivo à arco [23]. .......................................... 153
Figura A.14: Forma de onda de uma lâmpada fluorescente com reator magnético (a) e
respectivo espectro harmônico (b) [23]. ......................................................................... 154
Figura A.15: Corrente de magnetização de um transformador [23]....................................... 155
Figura A.16: Corrente de magnetização de um transformador e respectivo espectro harmônico
[23]. ................................................................................................................................ 156
Figura A.17: Sistema com potencial para ocorrência de ressonância paralela [23]. .............. 160
Figura A.18: circuito com potência para ressonância série [23] . .......................................... 161
Figura A.19: Resposta em freqüência do circuito da figura A.19 [23]. ................................. 162
Figura A.20: Diagrama de implementação do bloco “Impedância Ativa” da figura 4.1. ...... 164
Figura A.21: Diagrama de implementação do bloco “Filtro Ativo” da figura A.20. ............. 165
Figura A.22: Diagrama de implementação do bloco “PLL” da figura A.21. ......................... 166
Figura A.23: Diagrama de implementação do conversor PWM
transformador de
acoplamento.................................................................................................................... 166
16
Lista de Tabelas
Tabela 2.1: Valores de referência global das distorções harmônicas totais (% da tensão
fundamental). ................................................................................................................... 32
Tabela 2.2: Níveis de referência para distorções individuais de tensão (% da tensão
fundamental). ................................................................................................................... 33
Tabela 2.3: Limites globais de tensão expressos em porcentagem da tensão fundamental [27].
.......................................................................................................................................... 34
Tabela 2.4: Limites individuais em porcentagem da tensão fundamental [27]. ...................... 34
Tabela 2.5: Normas Internacionais .......................................................................................... 35
Tabela 2.6: Reprodução da Tabela 10.3 – IEEE519-1992....................................................... 35
Tabela 2.7: Padrões internacionais relativos a distorção harmônica de equipamentos elétricos.
.......................................................................................................................................... 37
Tabela 2.8: Comparação de custos de soluções para correção de fator de potência na presença
de harmônicos. ................................................................................................................. 52
Tabela 2.9: Filtros Ativos no Mercado – Modelos, fabricantes e capacidades........................ 56
Tabela 2.10: Filtros Ativos no Mercado – Principais funções ................................................. 56
Tabela 3.1 : Parâmetros de circuito equivalente do transformador coaxial. ............................ 88
17
Lista de Símbolos e Abreviações
ABREVIAÇÕES
ABNT – Associação Brasileira de Normas Técnicas;
ANEEL – Agência nacional de Energia Elétrica;
CC – Corrente contínua;
CA – Corrente alternada;
DTC – Distorção harmônica total de corrente;
DTT - Distorção harmônica total de tensão;
EMC – Electromagnetic Compatibility;
FFT– Fast Fourier Transform;
FP – Fator de potência;
IEC – International Electrotechnical Commission;
IEEE – Institute of Electrical and Electronics Engineers;
IGBTs – Insulated Gate Bipolar Transistors;
LC – Filtro indutivo-capacitivo;
PAC – Ponto de acoplamento comum;
PRODIST – Procedimentos de Distribuição de Energia Elétrica no Sistema Elétrico Nacional;
PCC – Point of Common Coupling;
PLL – Phase Locked Loop;
PPM – Polipropileno metalizado;
PROINPES - Programa de Incentivo à Pesquisa;
PWM – Pulse Width Modulation;
THD – Total Harmonic Distortion;
UPQC – Unified Power Quality Conditioner;
UPS – Uninterruptible Power Supply;
VSI – Voltage Source Inverter;
SCRs – Silicon Controlled Rectifiers;
18
SÍMBOLOS
I L - Corrente de carga;
I S - Corrente na fonte;
Io – Corrente de carga;
If – Componente fundamental da corrente de carga;
ILf – Componente fundamental da corrente de carga;
V1 – Componente fundamental da tensão;
Vh – Componente do harmônico de ordem h da tensão;
I1 – Componente fundamental da corrente;
Ih – Componente do harmônico de ordem h da corrente;
ZS – Impedância equivalente da fonte de alimentação;
p0 – componente de sequência zero da potência instantânea;
p0 – componente de sequência zero da potência instantânea;
pαβ – componentes em quadratura (αβ) da potência instantânea;
pαβ – componentes em quadratura (αβ) da potência reativa instantânea;
v0 – componente de sequência zero da tensão instantânea na carga;
vα – componente de eixo α da tensão instantânea na carga;
vβ – componente de eixo β da tensão instantânea na carga;
i0 – componente de sequência zero da corrente instantânea na carga;
iα – componente de eixo α da corrente instantânea na carga;
ω - freqüência angular da rede de alimentação;
t – constante de tempo;
θ - ângulo de defasagem entre a tensão de alimentação e corrente da carga;
hmáx - máxima ordem da componente harmônica de tensão ou corrente;
r1- resistência do enrolamento primário do transformador;
r2’- resistência do enrolamento secundário referida ao primário do transformador;
x1 – reatância de dispersão do enrolamento primário;
x2 – reatância de dispersão do enrolamento secundário;
xm – reatância de magnetização referida ao primário do transformador;
19
rm – resistência equivalente para modelagem das perdas no núcleo ferromagnético referida ao
primário do transformador;
rp- resistência do enrolamento primário do transformador;
rs- resistência do enrolamento secundário do transformador;
Lp – indutância de dispersão do enrolamento primário do transformador;
Ls – indutância de dispersão do enrolamento secundário do transformador;
i1 – corrente no primário do transformador;
i2‘– corrente no secundário referida ao primário do transformador;
Vfund – componente de freqüência fundamental da tensão de compensação;
Is – Corrente no sistema de potência;
Vcc – Tensão no barramento CC do conversor de freqüência;
vcc(t)– Tensão instantânea no barramento CC do conversor de freqüência;
If^ - Estimativa da componente fundamental da corrente no banco de capacitores;
Ih^ - Estimativa da componente harmônica de ordem h da corrente no banco de capacitores;
θh – ângulo de fase da componente de ordem h da corrente no banco de capacitores;
θf – ângulo de fase da componente fundamental da corrente no banco de capacitores;
ωh – freqüência angular da componente de ordem h da corrente no banco de capacitores;
Iqh_flt – Componente de eixo em quadratura da componente harmônica de ordem h filtrada;
Iqf_flt – Componente de eixo em quadratura da componente fundamental filtrada;
^ - símbolo usado para indicar grandezas estimadas;
B(z) – numerador da função de transferência do filtro passa-baixas (PB) discreto;
A(z) – denominador da função de transferência do filtro passa-baixas (PB) discreto;
L* - referência de indutância ativa a ser sintetizada pelo compensador;
Vh(t) – tensão harmônica instantânea;
d
- derivada em relação ao tempo;
dt
Iα - componente α no da referência de corrente para os algoritmos PLL – referencial
estacionário;
Iβ - componente β no da referência de corrente para os algoritmos PLL – referencial
estacionário;
Id - componente de eixo direta da corrente nos algoritmos PLL;
Iq - componente de eixo direta da corrente nos algoritmos PLL;
20
* - valores utilizados para grandezas de referência;
ωfbk - freqüência angular resultante da malha de realimentação dos algoritmos PLL;
ωff – componente feed forward de freqüência utilizada nos algoritmos PLL;
τ - constante de tempo;
PI – controlador proporcional-integral
Kp – ganho proporcional;
Ki – ganho integral;
Iq5h – componente de eixo em quadratura da corrente de quinto harmônico;
Iq7h* –componente de eixo em quadratura da corrente de sétimo harmônico;
L5h* – referência de indutância ativa para o quinto harmônico;
L7h* – referência de indutância ativa para o quinto harmônico;
vf(t) – componente fundamental instantânea da tensão de compensação para controle do
barramento CC;
g(t) – condutância em função do tempo;
v1(t) – referência de tensão fundamental instantânea para controle do barramento CC do
conversor;
i1(t) – corrente
instantânea fundamental utilizada para controle do barramento CC do
conversor;
Ip – corrente de pico da componente fundamental da corrente;
P(t) – potência instantânea na saída do conversor;
PQ(t) – potência reativa instantânea;
∆E(t) – Variação de energia armazenada no barramento CC do conversor;
C – Capacitância do barramento CC do conversor;
∆vcc – Ripple de tensão no barramento CC do conversor;
Ph – potência aparente associada à componente harmônica h;
Ihrms’ – valor eficaz da corrente harmônica referida ao primário do transformador;
Vhrms’ – valor eficaz da tensão harmônica referida ao primário do transformador;
H – campo magnético;
dl – incremento diferencial em comprimento;
dr – incremento diferencial na direção radial;
dz – incremento diferencial na direção z;
B – vetor densidade de fluxo magnético;
21
d A – vetor diferencial de área;
B(r)- densidade de fluxo magnético em função do raio r;
µ - permeabilidade magnética do meio;
µ0 - permeabilidade magnética do vácuo;
µr - permeabilidade magnética relativa do material utilizado para construção do
transformador;
φ - fluxo magnético;
b – comprimento do núcleo do transformador coaxial;
r0 – raio externo do núcleo do transformador coaxial;
ri – raio interno do núcleo do transformador coaxial;
Ac – área da seção transversal do transformador coaxial;
B(t) – densidade de fluxo instantânea no núcleo do transformador coaxial;
Bf(t) – densidade de fluxo instantânea na freqüência fundamental;
Bh(t) – densidade de fluxo instantânea na freqüência harmônica de ordem h;
Bsatmax – máxima densidade de fluxo de saturação do material magnético utilizado no
transformador coaxial;
Vh2_rms – tensão eficaz sintetizada na componente harmônica de ordem h referida ao
secundário do transformador;
Vf2_rms – tensão eficaz sintetizada na freqüência fundamental referida ao secundário do
tranformador;
Lms – indutância de magnetização do transformador (referida ao secundário);
g – comprimento do entreferro do transformador;
Imag_h_p – corrente de magnetização referente à síntese de tensão no harmônico de ordem h do
transformador referida ao primário;
Imag_f_p – corrente de magnetização referente à síntese de tensão na freqüência fundamental do
transformador referida ao primário;
Imag_rms_p – corrente total eficaz de magnetização do transformador referida ao primário;
vaux – tensão auxiliar utilizada para modelagem do transformador coaxial (ver figura 3.12);
vp – tensão no primário do transformador;
vL – tensão na indutância de dispersão do transformador (ver figura 3.12);
vs‘– tensão no secundário do transformador referida ao primário;
ip – corrente no primário do transformador (ver figura 3.12);
22
is – corrente no secundário do transformador;
v ah (t ) – tensão harmônica de compensação na para fase a;
vbh (t ) – tensão harmônica de compensação na para fase a;
vvh (t ) – tensão harmônica de compensação na para fase a;
∆iα – perturbação na componente de eixo α da corrente rastreada pelo PLL;
∆iβ – perturbação na componente de eixo β da corrente rastreada pelo PLL;
θ0 – ângulo de fase do ponto de operação do PLL;
φf - densidade de fluxo no frequência fundamental;
φh - densidade de fluxo no frequência harmônica de ordem h;
vf1 – tensão induzida no enrolamento primário do transformador na frequência fundamental;
vh1 – tensão induzida no enrolamento primário do transformador na frequência harmônica;
vf2 – tensão induzida no enrolamento secundário do transformador na frequência fundamental;
vh2 – tensão induzida no enrolamento secundário do transformador na frequência harmônica.
∆θ - pertubação em torno do ponto de operação θ0.
Capítulo 1
Introdução
1.1. Relevância
O
avanço
da
tecnologia
nos
sistemas
industriais,
impulsionado
pelo
contínuo
desenvolvimento da eletrônica de potência, vem aumentando significativamente a quantidade
de cargas não-lineares, tais como inversores de freqüência, soft-starters, fornos a arco,
máquinas de solda, etc., [1], [2], [3]. O aumento das cargas não-lineares introduz
características adicionais no sistema elétrico de forma que a correção de fator de potência
exija cuidados especiais com a distorção harmônica de tensão e corrente provocada por este
tipo de carga. O efeito da distorção harmônica, caracterizado na literatura pelo fator de
distorção [4], [5], aumenta as perdas no sistema de distribuição, reduz o fator de potência e
pode provocar interferência eletromagnética nos equipamentos interligados ao sistema
elétrico.
Uma constante preocupação em relação à operação eficiente de uma instalação elétrica, seja
industrial ou comercial, está relacionada ao fator de potência associado ao consumo de
energia da instalação. A operação com baixo fator de potência implica em aumento da
demanda de corrente para a realização de uma determinada atividade o que por sua vez
aumenta as perdas nos sistemas de distribuição. O aumento das perdas, do ponto de vista da
instalação consumidora, implica em aumento do custo de operação e, do lado da
concessionária, aumenta os custos relativos ao dimensionamento e manutenção, uma vez que
a capacidade do sistema de distribuição deve ser aumentada em comparação com uma mesma
demanda de energia realizada com maior fator de potência.
A solução mais empregada para a correção de fator de potência de um sistema elétrico
industrial é a instalação de bancos de capacitores. Esta compensação é implementada de
quatro maneiras distintas: correção na entrada de energia em alta tensão, correção na entrada
de energia em baixa tensão, correção por grupos de cargas, correção localizada ou ainda uma
solução mista utilizando as alternativas anteriores [6]. Quando a potência instalada de cargas
não-lineares é significativa com relação às cargas lineares, as correntes que circulam no
sistema podem apresentar forte distorção harmônica. Neste caso, a correção de fator de
24
potência utilizando somente banco de capacitores pode não ser efetiva e, além disso, a
interação das reatâncias do sistema com o banco de capacitores pode resultar em ressonâncias
potencialmente perigosas. Essas ressonâncias podem ser excitadas pelas componentes
harmônicas originadas pelas cargas não-lineares, impossibilitando a utilização de banco de
capacitores para a correção do fator de potência [7]. Esse tipo de ocorrência é freqüente no
meio industrial, elevando o custo de operação de várias indústrias devido ao pagamento de
multas pelo consumo excessivo de reativos e a majoração dos gastos para expansão dos
sistemas de alimentação.
Uma solução para a atenuação das harmônicas de corrente é a utilização de alternativas
passivas, as quais consistem na utilização de filtros sintonizados constituídos basicamente por
combinações da estrutura LC série [8]. Podem ser empregados tanto como filtros de bloqueio,
criando caminhos de alta impedância entre a fonte e a carga, bem como filtros de
confinamento que consistem basicamente na criação de caminhos de baixa impedância para a
circulação de harmônicas de corrente [9]. Os filtros para confinamento das harmônicas de
corrente podem provocar ressonâncias em outras freqüências, elevando os níveis de
harmônicas que não causavam perturbações antes de sua instalação.
Os filtros passivos apresentam características de compensação fixas. Sua utilização exige um
criterioso estudo da planta antes de sua instalação. Estudos adicionais também serão
necessários sempre que houver um acréscimo de carga no sistema ou mudanças na estrutura
de distribuição de energia dentro da industria. Além dos problemas de ressonância pode-se
citar como desvantagem dos filtros passivos o volume significativo e o fato de que as
características de filtragem dependem da impedância da rede [9].
Como solução alternativa para a minimização da distorção harmônica de tensão e/ou corrente
e correção de fator de potência em sistemas elétricos atualmente são empregados os filtros
ativos [9], [10], [11], [12]. Estes são baseados na utilização de conversores estáticos
controlados que são conectados com a rede de maneira a eliminar distorções de tensão ou de
corrente e ainda efetuar a correção do fator de potência da carga [1], [9], [13].
Os filtros ativos podem ser agrupados em dois tipos: série e paralelo. Os filtros ativos tipo
série isolam a carga contra perturbações na tensão da rede, tais como flutuações de tensão,
distorção harmônica e notching. Os filtros do tipo paralelo funcionam injetando corrente
25
harmônica para compensar a demanda originada pela carga não-linear, evitando que essa
corrente harmônica seja fornecida pela rede de alimentação. Se controlados adequadamente,
podem compensar também a defasagem entre a tensão da rede e a corrente da carga, de
maneira que o conjunto constituído da carga e filtro ativo demande uma corrente praticamente
senoidal e em fase com a tensão da rede. Comparados com os filtros passivos os filtros ativos
apresentam menor volume, não há problemas de ressonância com a rede e têm a capacidade
de se adaptar às modificações de carga, ou seja, as características de compensação não são
fixas. Além disso, normalmente não há a necessidade de um conhecimento prévio detalhado
da planta antes da sua instalação.
Os princípios básicos dos filtros ativos trifásicos foram propostos na década de 70 [9],
[14],[15], [16], sua popularização ocorreu na década de 80 com o trabalho de Akagi e Nabae
[17], no qual uma nova teoria de potências real e imaginária baseada no domínio do tempo,
foi apresentada, permitindo a compensação em tempo real. A teoria é baseada no cálculo das
componentes média e oscilante da potência e utiliza a transformação αβ0 (Clark). Os filtros
ativos são constituídos de conversores estáticos que utilizam dispositivos semicondutores de
potência para sua implementação. Os dispositivos semicondutores de potência representam
grande parte do custo de tais equipamentos, sendo que este custo aumenta significativamente
com a elevação da potência que deve ser manipulada pelo filtro, definida pelos níveis de
tensão e corrente do sistema onde os filtros serão inseridos.
O requisito de compensação de harmônicos implica na necessidade de ampla faixa de
passagem do filtro, o que, por sua vez, limita a máxima potência dos conversores que podem
ser utilizados. Uma alternativa que vem sendo proposta na literatura é a associação de
diversos elementos de filtragem independentes, posicionados de forma distribuída na planta
industrial com o objetivo de se otimizar o processo de filtragem [18], [19], [20]. O conceito
desta abordagem é instalar diversos filtros, onde cada filtro é instalado junto a uma carga ou
conjunto de cargas não-lineares específicas, evitando que as correntes harmônicas associadas
a estas cargas circulem pelo sistema. A estratégia de filtros distribuídos pode permitir a
obtenção dos resultados de compensação desejados a partir da utilização de filtros com menor
capacidade, de forma que a potência total de filtragem seja menor quando comparados à
instalação de filtros de forma localizada.
26
Para a redução do custo dos filtros ativos é proposta na literatura [9], [21], [22], a utilização
de filtros híbridos, que consistem de uma combinação entre filtros passivos e filtros ativos.
Além da redução de custo, a utilização de filtros híbridos apresenta desempenho superior,
uma vez que a parte passiva do filtro pode ficar responsável por compensar uma maior parcela
de reativos e/ou eliminar uma determinada componente harmônica e o filtro ativo faria a
compensação final, garantindo uma compensação dinâmica ótima do sistema. A estrutura
híbrida também contribui para atenuar as limitações do conversor, pois minimiza a potência
necessária da parte ativa do filtro e ainda pode promover o ajuste “fino” no processo de
correção de fator de potência e distorção harmônica.
Apesar de praticamente sempre presentes no sistema elétrico, os harmônicos só geram
problemas em casos específicos, entre os quais, destaca-se a interação com os capacitores para
correção de fator de potência os quais, juntamente com as impedâncias do sistema, definem
ressonâncias que são excitadas pelo conteúdo harmônico existente. É importante mencionar
que independente da ocorrência da excitação de ressonâncias, a característica de impedância
versus freqüência dos capacitores os converte em “absorvedores” naturais de harmônicos
[23], [24]. Nessas condições os capacitores normalmente são os primeiros a falhar [25],
trazendo prejuízos materiais e multas devido ao pagamento de multas por baixo fator de
potência.
Qualquer alternativa que possa ser utilizada para permitir a operação do sistema de correção
de fator de potência na presença de harmônicos sem o desgaste prematuro de seus
componentes e não representando um custo excessivo, quando comparado ao do sistema de
correção de fator de potência, tem grande potencial de aplicação no meio industrial,
justificando o empreendimento de esforço para o seu desenvolvimento. A possibilidade de
introduzir seletivamente impedâncias série em freqüências harmônicas específicas fornece
uma valiosa ferramenta de controle de fluxo de harmônicos, mantendo-se totalmente
independente o fluxo de potência na freqüência fundamental, o que confere um alto grau de
flexibilidade para o gerenciamento de instalações elétricas e redução dos custos na
implementação de soluções.
O foco deste trabalho é a implementação de um sistema capaz de sintetizar e introduzir de
forma flexível impedâncias harmônicas em sistemas elétricos industriais. O trabalho pretende
apresentar uma estrutura para estimativa de amplitude e fase das correntes fundamental e
27
harmônica e realização da geração das tensões correspondentes para a síntese das impedâncias
harmônicas desejadas. Será realizada também uma avaliação dos requisitos do projeto do
sistema de injeção de tensão, baseado em conversor de freqüência e transformador de
acoplamento coaxial, o qual constitui uma forma eficiente e flexível para injeção das tensões
harmônicas, permitindo a rápida instalação a partir da utilização do próprio cabo do sistema
de potência como secundário do transformador.
1.2. Objetivos
Os objetivos desse trabalho de pesquisa podem ser sumarizados da seguinte forma:
•
Desenvolver um sistema ativo, baseado no uso de conversor de freqüência, para
síntese de impedâncias em harmônicos específicos permitindo o controle de fluxo
de harmônicos em sistemas elétricos industriais;
•
Desenvolver uma estratégia para a obtenção da amplitude e fase das componentes
fundamental e harmônica de corrente e respectiva síntese de tensão harmônica
correspondente à impedância a ser inserida;
•
Propor um sistema de indução de tensão baseado no uso de transformador coaxial
para permitir a utilização do próprio cabo de potência do sistema alvo como
secundário, resultando em um sistema de grande flexibilidade para instalação;
•
Avaliar o desempenho do sistema proposto na aplicação na dessintonia ativa de
bancos de capacitores e controle do fluxo de harmônicos.
1.3. Proposta de Trabalho
A proposta de trabalho consiste na realização das seguintes atividades:
28
•
Estudo de estruturas para realizar a estimativa da amplitude e fase das
componentes de corrente do sistema a ser compensado;
•
Levantamento dos requisitos de projeto do transformador axial para a indução da
tensão harmônica desejada;
•
Definição dos parâmetros construtivos básicos do conversor estático utilizado para
a síntese da tensão desejada;
•
Projeto das estruturas de controle necessárias – barramento CC do conversor e
sintonia de algoritmos PLL;
•
Avaliação dos requisitos de proteção do sistema;
•
Projeto de protótipo para a avaliação prática do sistema proposto;
•
Obtenção e avaliação de resultados experimentais da aplicação do sistema
desenvolvido.
1.4. Contribuições
As principais contribuições deste trabalho de pesquisa são destacadas abaixo:
•
Avaliação de custos de soluções para correção de fator de potência na presença de
harmônicos;
•
Desenvolvimento de uma estratégia de estimação de correntes e síntese de tensões
harmônicas de forma seletiva;
•
Desenvolvimento de um sistema inovador, baseado na utilização de transformador
coaxial, para a inserção de impedâncias controladas em sistemas elétricos
industriais para o controle de fluxo de harmônicos;
•
Redução da utilização de sensores e a dependência do conhecimento imediato da
causa da distorção de corrente para a efetivação da compensação harmônica;
29
•
Apresentação de resultados de simulação da aplicação do sistema proposto em uma
aplicação industrial típica, a qual apresenta significativa variação dinâmica,
confirmam a viabilidade da utilização do sistema.
1.5. Organização do Texto
No capítulo 2 é feita uma descrição geral sobre a questão de harmônicos em sistemas
elétricos. São apresentadas as principais recomendações nacionais e internacionais e as
soluções normalmente adotas para a mitigação. Também é apresentada uma pesquisa
bibliográfica sobre ativos filtros híbridos, tema diretamente relacionado à proposta
apresentada neste trabalho, acompanhada de uma pesquisa de mercado que avalia as
alternativas de filtros ativos e híbridos efetivamente disponíveis para aquisição no mercado.
Uma discussão objetiva sobre as soluções para correção de fator de potência quando da
presença de harmônicos é apresentada, a qual aborda aspectos importantes sobre o custo da
solução e a necessidade de uma solução com melhor custo-benefício.
O capítulo 3 apresenta toda a formulação da estratégia e respectiva fundamentação do sistema
de síntese da impedância harmônica ativa, apresentando a estratégia de estimação de correntes
harmônicas e síntese de tensão. Também são abordadas as características básicas do projeto
dos itens que compõe o hardware do sistema: o transformador coaxial e o conversor de
freqüência. O transformador coaxial é analisado de forma analítica e experimental através de
ensaios de determinação de parâmetros de um protótipo. Também é discutida uma estratégia
para proteção do compensador proposto contra curto-circuito no sistema de potência,
incluindo resultados de simulação e experimentais preliminares do sistema de proteção.
Finalmente no capítulo é apresentada a formulação necessária para a extensão do conversor
proposto para uma versão trifásica do compensador.
O capítulo 4 é dedicado à apresentação dos resultados de simulação da aplicação do sistema
de impedância harmônica ativa em um banco de capacitores para correção de fator de
potência, o qual apresenta ressonância no quinto harmônico. Nas simulações o sistema
desenvolvido é aplicado para o bloqueio de fluxo de harmônico no banco capacitores. São
apresentadas simulações considerando fonte harmônica ideal de corrente e tensão, fonte
30
harmônica representada por retificador e ainda compensação simultânea de quinto e sétimos
harmônicos. Também são apresentados neste capítulo resultados de simulação relacionados à
implementação trifásica do compensador proposto. Finalmente, no mesmo capítulo são
apresentados os resultados experimentais obtidos até a elaboração deste texto. Os resultados
apresentados foram obtidos com protótipo monofásico em pequena escala e representam uma
prova de conceito para atestar a viabilidade do projeto proposto.
O capítulo 5 sumariza as conclusões deste trabalho ressaltando os principais resultados e
contribuições. Também são apresentadas propostas de investigações futuras a partir das idéias
e resultados desenvolvidos neste trabalho.
Capítulo 2
Harmônicos – Recomendações e Soluções para Mitigação.
2.1. Introdução
Com o objetivo de evidenciar os principais aspectos considerados no desenvolvimento do
trabalho, neste capítulo é realizada uma revisão geral sobre harmônicos apresentando os
principais padrões internacionais relacionados ao controle dos níveis de distorção harmônica e
as principais técnicas utilizadas atualmente para a mitigação de harmônicos. Resultados de
uma pesquisa bibliográfica relacionada a alternativas ativas e híbridas de mitigação harmônica
são apresentadas neste capítulo. Também é apresentado um levantamento da disponibilidade
comercial das soluções ativas e híbridas no mercado nacional incluindo alguns fabricantes de
atuação mundial.
Na seção 2.4 é apresentado um estudo objetivo relacionado ao custo de soluções para correção
de fator de potência em sistemas com significativa distorção harmônica, evidenciando a
necessidade de soluções com melhor relação custo-benefício. Os tópicos abordados neste
capítulo permitem obter uma visão geral do cenário de inserção deste trabalho e não tem o
objetivo de discorrer sobre detalhes específicos sobre os respectivos tópicos. Discussões mais
detalhadas poderão ser encontradas nas referências ao longo do texto.
No anexo deste trabalho, para fins de referência rápida, é apresentado um resumo que
descreve as principais fontes de harmônicos e os efeitos nos principais equipamentos elétricos
industriais. Referências citadas ao longo do texto devem ser consultadas para se obter uma
descrição mais detalhada dos tópicos abordados.
2.2. Principais Recomendações sobre Harmônicos
Basicamente existem dois conjuntos de recomendações sobre harmônicos: um voltado para o
estabelecimento de condições gerais dos sistemas de potência e de distribuição das
32
concessionárias e consumidores, e outro voltado para o estabelecimento de requisitos de
emissão e suscetibilidade de equipamentos elétricos.
2.2.1. Recomendações Direcionadas a Sistemas
No Brasil, no final de 2008, foi aprovado junto à ANEEL (Agência Nacional de Energia
Elétrica) o PRODIST – Procedimentos de Distribuição de Energia Elétrica no Sistema
Elétrico Nacional [26]. As Tabelas 2.1 e 2.2, retiradas de [26] mostram, respectivamente, os
valores de referência globais para as distorções harmônicas totais de tensão e os níveis de
referência para distorções harmônicas individuais de tensão.
A distorção harmônica total da tensão (DTT) e a distorção harmônica total de corrente (DTC)
são calculadas pelas expressões (2.1) e (2.2), respectivamente. O espectro harmônico a ser
considerado para o cálculo da distorção total de tensão ou da corrente deve compreender uma
faixa de freqüências que considere desde a componente fundamental até no mínimo a 25ª
componente harmônica.
(2.1)
hmáx
∑Vh2
DTT =
h=2
V1
× 100
(2.2)
hmáx
∑ I h2
DTC =
h=2
I1
× 100
Tabela 2.1: Valores de referência global das distorções harmônicas totais (% da tensão
fundamental).
Tensão nominal do Barramento
Distorção Harmônica Total de Tensão – DTT
VN ≤ 1kV
10%
1kV < VN ≤ 13,8 kV
8%
13,8kV < VN ≤ 69 kV
6%
69kV < VN ≤ 230 kV
3%
33
Tabela 2.2: Níveis de referência para distorções individuais de tensão (% da tensão
fundamental).
O sub-módulo 2.8 do documento “Procedimentos de Rede” [27], estabelece os critérios a
serem adotados para a distorção harmônica de tensão na rede básica e seus componentes. Os
limites são estabelecidos considerando a determinação do valor de distorção de tensão que foi
superado em apenas 5% dos registros obtidos no período de 1 dia (24 horas), ao longo de 7
dias consecutivos, sendo o maior valor diário utilizado como referência para comparação com
34
os limites estabelecidos nas tabelas 5 (limites globais) e 6 (limites individuais) do referido
documento, as quais são reproduzidas nas tabelas 2.3 e 2.4 a seguir.
Tabela 2.3: Limites globais de tensão expressos em porcentagem da tensão fundamental [27].
Tabela 2.4: Limites individuais em porcentagem da tensão fundamental [27].
A tabela 2.5, extraída de [28], resume os padrões internacionais adotados com relação à
distorção harmônica. É importante mencionar que a tabela 10.3 do padrão IEEE 519,
reproduzida na tabela 2.6, têm sido utilizado de forma errônea [29] para o estabelecimento de
limites para a análise de equipamentos ou subsistemas, utilizando-se como referência a razão
de curto circuito do equipamento, enquanto que o padrão estabelece a avaliação de toda a
instalação consumidora, utilizando-se a razão de curto circuito no PCC e a corrente de
demanda de toda a instalação.
Também é importante citar o padrão IEC 61000-4-30 “Testing Measurement Techniques –
Power Quality Measurement Methods”, a qual define requisitos básicos para a realização de
medições para caracterização da qualidade da energia em sistemas elétricos. No Brasil, a
ABNT deverá editá-la gerando a norma NBR IEC 61000-4-30 Compatibilidade
Eletromagnética (CEM) Parte 4-30 “Técnicas de Medição – Métodos de Medição da
Qualidade da Energia Elétrica”.
35
Tabela 2.5: Normas Internacionais
Norma
IEC 61000-3-6
IEC 61000-2-2
IEEE 519
Abrangências
Sub-área de abrangências
Rede de distribuição
das
concessionárias
Estabelece os níveis de planejamento para os
sistemas das concessionárias e as etapas que
devem ser consideradas para limitar as injeções
dos harmônicos dos consumidores,
assegurando a Compatibilidade
Eletromagnética.
Sistemas de baixa
São estabelecidos os níveis de compatibilidade
tensão de distribuição dos distúrbios conduzidos no ponto de
das concessionárias.
acoplamento comum, PAC, dos sistemas de
distribuição das concessionárias.
Sistemas das
Estabelece alguns critérios técnicos, para
concessionárias e dos avaliações dos harmônicos, os limites máximos
consumidores em
das correntes harmônicas injetáveis nos
qualquer nível de sistemas e os níveis máximos das tensões
tensão
harmônicas permitidas para estes sistemas.
Tabela 2.6: Reprodução da Tabela 10.3 – IEEE519-1992
36
2.2.2. Recomendações Direcionadas para Equipamentos
A tabela 2.7 apresenta uma lista dos principais padrões internacionais voltados para o
estabelecimento de critérios de emissão e suscetibilidade de equipamentos com relação à
distorção harmônica [29]. O conhecimento dos padrões relativos aos equipamentos apresenta
grande importância no momento do planejamento da aquisição e instalação dos mesmos, pois
a partir da verificação dos padrões atendidos pelos fabricantes pode-se realizar a avaliação do
impacto desses equipamentos na instalação elétrica onde os mesmos serão instalados. No
Brasil, a prática tem sido a adoção das normas internacionais, principalmente as normas IEC.
Atualmente no Brasil não existe uma regulamentação em relação à limitação de distorções
harmônicas semelhante à existente em relação ao fator de potência, o que implica que não são
estabelecidas multas em caso de não atendimento aos critérios adotados. Os padrões relativos
à distorção harmônica têm sido discutidos mas, ações efetivas para a mitigação só são
realizadas quando há ocorrência de problemas de funcionamento dos sistemas elétricos e/ou
dos equipamentos a eles conectados. Por outro lado, têm-se verificado nos últimos anos uma
intensa movimentação por parte dos agentes (ANEEL, concessionárias, fabricantes de
equipamentos elétricos e consumidores) no sentido de estabelecer uma regulamentação que
preverá a taxação dos agentes, de acordo com sua responsabilidade, conforme pode ser
observado nas apresentações plenárias e palestras apresentadas durante a Conferência
Brasileira sobre Qualidade da Energia, realizado em Blumenau em 2009.
37
Tabela 2.7: Padrões internacionais relativos a distorção harmônica de equipamentos elétricos.
Padrão
Descrição
IEC61000-2-2
Compatibility
Electromagnetic Compatibility
conducted disturbances and signalling in
(EMC)
public low-voltage power supply systems.
levels
for
low
frequency
Estabelece os níveis de compatibilidade para
distúrbios de baixa freqüência em
sistemas
elétricos públicos de baixa tensão. Este padrão
define basicamente os critérios de projeto para
os fabricantes de equipamentos de forma a
garantir características mínimas de imunidade.
IEC61000-2-4
Compatibility levels in industrial plants for low
Electromagnetic Compatibility
frequency conducted disturbances.
(EMC)
Este padrão é semelhante ao IEC1000-2-2,
porém
o
mesmo
compatibilidade
estabelece
para
redes
níveis
de
industriais
e
privadas. São cobertas tanto redes de baixa
tensão quanto de média tensão, excluindo redes
para
embarcações,
aeronaves,
plataformas
marítimas e ferrovias.
IEC61000-3-2
Limits
Electromagnetic Compatibility
(equipment current < 16 A per phase). Este
(EMC)
padrão trata dos limites de emissão de corrente
for
harmônica
harmonic
de
current
equipamentos
emissions
individuais
conectados a redes públicas.
IEC61000-3-4
Este padrão determina os limites de emissão de
Electromagnetic Compatibility
corrente
(EMC)
individuais tendo corrente nominal de 16A até
harmônica
para
equipamentos
75 A, sendo aplicado à redes públicas com
tensões nominais entre 230V monofásico a
600V trifásico
38
2.3. Soluções para a Mitigação de Harmônicos
Nesta seção as principais soluções utilizadas atualmente para a mitigação de distorção
harmônica são abordadas. O objetivo é apresentar os tipos de soluções empregadas, dando-se
foco nas alternativas ativas e híbridas de compensação. Não serão discutidas neste trabalho
soluções alternativas como, por exemplo, alterações na instalação elétrica no sentido da
redistribuição de cargas, as quais são demasiadamente dependentes da configuração do
sistema em cada caso.
2.3.1. Filtros Passivos
Uma solução para a atenuação das harmônicas de corrente, utilizando componentes
passivos, consiste na utilização de filtros sintonizados constituídos basicamente da estrutura
LC série [23], [30], [31]. Podem ser empregados tanto como filtros de bloqueio, criando
caminhos de alta impedância entre a fonte e a carga (figura 2.1), bem como filtros de
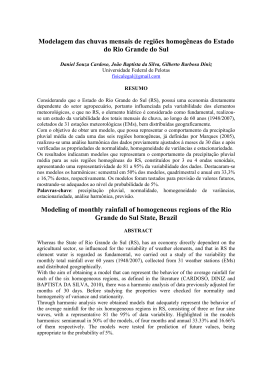
confinamento (figura 2.2) que consistem basicamente na criação de caminhos de baixa
impedância para a circulação de harmônicas de corrente [9], [24].
Figura 2.1: Filtro passivo série para bloqueio de harmônicos.
Figura 2.2: Filtro passivo paralelo (shunt) para confinamento de harmônicos.
39
Os filtros passivos apresentam características de compensação fixas. Sua utilização exige um
criterioso estudo da planta antes de sua instalação e também toda vez que houver um
acréscimo de carga no sistema. Além dos problemas de ressonância pode-se citar como
desvantagem dos filtros passivos o volume físico significativo e o fato de que as
características de filtragem dependem da impedância da rede [24].
2.3.2. Filtros Ativos
Uma solução alternativa para a correção de fator de potência e minimização da distorção
harmônica de tensão e/ou corrente em sistemas elétricos esta no uso de filtros ativos [9], [10],
[11], [31]. Estes são constituídos basicamente por conversores estáticos conectados com a
rede de maneira a eliminar distorções de tensão ou de corrente e ainda efetuar a correção do
fator de potência da carga [1], [8], [9], [13].
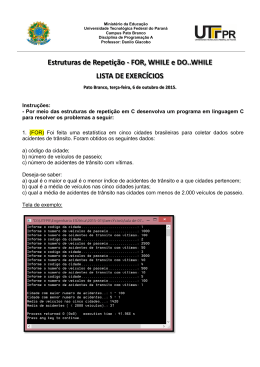
Na figura 2.3 é apresentado o diagrama em blocos generalizado que descreve o princípio de
funcionamento dos filtros ativos. Basicamente, a informação relacionada às correntes e/ou
tensões do sistema são obtidas e repassadas ao estimador dos sinais de referência, o qual
realiza o desacoplamento entre a componente fundamental e as componentes harmônicas e
calcula as referências a serem utilizadas para gerar os comandos de controle do circuito de
potência, de forma a realizar a mitigação harmônica de acordo com a estratégia escolhida.
Como apresentado na figura 2.3, é possível realizar a compensação utilizando-se as grandezas
no lado da carga ou no lado da fonte.
40
Figura 2.3: Esquema básico de funcionamento dos filtros ativos
2.3.2.1.
Filtros Ativos Paralelos
A configuração paralela, também denominada “shunt” é a mais difundida em aplicações de
filtragem ativa e existe uma ampla literatura técnica sobre sua implementação e aplicação
[10], [32], [33], [34], [35], [36], [37], [38], [39], [40], [41], [42]. Filtros tipo shunt atuam
como fonte de corrente, compensando as harmônicas de corrente devido à presença de cargas
não-lineares.
A operação do filtro paralelo, mostrada de forma simplificada na figura 2.4, é baseada na
injeção da corrente de compensação a qual é igual à componente de corrente de distorção,
defasada em 180 graus, eliminando, portanto, a componente de corrente distorcida original,
do ponto de vista da fonte. A corrente de compensação é obtida a partir da medição da
corrente na carga e subtraindo-a de uma referência senoidal. O objetivo do filtro é fazer com
que seja drenada da fonte apenas uma corrente senoidal, sendo que as componentes
harmônicas drenadas pela carga não-linear sejam fornecidas pelo filtro. De acordo com [43] e
[44], caso não ocorra compensação harmônica total, existe a possibilidade de existência de
amplificação harmônica devido à ressonância nos métodos baseados na compensação da
41
corrente na carga. Nas subseções seguintes são tratadas as principais implementações ativas
encontradas na literatura.
Figura 2.4: Filtros ativos série e paralelo
Supondo que a corrente de carga não-linear possa ser escrita como a soma da componente
fundamental e as componentes harmônicas então:
I L = I Lf + I Lh
(2.1)
Quanto a corrente de compensação a ser fornecida pelo filtro ativo esta deve ser: I f = I Lh , fato
este que conduz a:
I s = I L − I f = I Lf
(2.2)
A qual deverá conter apenas a componente fundamental da corrente da carga.
Do ponto de vista da carga não-linear o filtro pode ser considerando como uma impedância
paralela variável. A impedância é zero, ou bem pequena, para as freqüências harmônicas e
praticamente infinita para a freqüência fundamental. Como resultado, a redução da distorção
de tensão ocorre pelo fato de que o fluxo de correntes harmônicas pela impedância da fonte
ser reduzida. Filtros paralelos têm a vantagem de suprirem basicamente a corrente de
compensação adicionada a uma pequena corrente fundamental necessária para compensar as
perdas no sistema. É possível também realizar compensação de reativos. Além disso, é
também possível conectar diversos filtros em paralelo para obter altas correntes de
compensação , o que torna este tipo de circuito aplicável a uma ampla faixa de potências [45]
e ainda adequado para realização de compensação distribuída [18], [19], [20].
Comparando com os filtros passivos, não geram problemas de ressonância com a rede e têm a
capacidade de se adaptar as modificações de carga, ou seja, as características de compensação
não são fixas. Além disso não há, normalmente, a necessidade de um conhecimento prévio
detalhado da planta antes da sua instalação.
42
Do ponto de vista de hardware, um filtro ativo paralelo consiste no uso do conversor VSI
(voltage source inverter) controlado como fonte de corrente, devido a sua topologia já
conhecida e bem estabelecida e ainda a facilidade de instalação. A figura 2.5 apresenta a
topologia típica utilizada. Ela consiste no conversor PWM, o qual utiliza IGBTs como
dispositivos semicondutores para implementação das chaves eletrônicas, capacitores para a
formação do barramento CC e indutores de acoplamento.
Figura 2.5: Filtro ativo em um sistema de alimentação.
2.3.2.2.
Filtros Ativos Série
O princípio de aplicação e a topologia típica dos filtros série são apresentados nas figuras 2.6
e 2.7. O filtro é conectado em série com o alimentador através de um transformador de
acoplamento. O conversor VSI é utilizado como fonte de tensão controlada. O princípio de
operação é semelhante aos filtros paralelos, porém, substituindo-se o indutor de acoplamento
pelo transformador [9], [35].
Figura 2.6: Filtros ativos série
43
Figura 2.7: Topologia típica dos filtros ativos série
A operação dos filtros série é baseada no bloqueio do fluxo dos harmônicos entre a carga nãolinear e a fonte. Isto é obtido a partir da injeção de tensões harmônicas (vf) através do
transformador de acoplamento. As tensões harmônicas injetadas são somadas/subtraídas
com/da tensão da fonte com o objetivo de manter uma forma de onda senoidal para a carga
não-linear. O filtro série pode ser pensado como um isolador de harmônicos. Ele é controlado
de forma que apresenta impedância nula para componente fundamental, mas aparece como
um resistor com alta impedância para componentes harmônicas.
Filtros ativos série são bem menos comuns do que os filtros paralelos, o que é resultante dos
altos níveis de corrente a qual o filtro deve ser submetido, uma vez que toda a corrente
fundamental passa pelo primário do transformador de acoplamento, aumentando as perdas no
filtro. Outra dificuldade é a proteção do conjunto em situações de falta tais como curtocircuito por exemplo. Contudo, a principal vantagem dos filtros série é que eles são ideais
para eliminação de distorção de tensão. Com os filtros série é possível fornecer uma tensão
praticamente senoidal para as cargas sensíveis (tais como dispositivos de proteção). Essa
característica torna os filtros série aplicáveis na melhoria da qualidade da tensão de
distribuição [35], [46], [47]. Na literatura a implementação de filtros ativos série é
extensivamente discutida quando da utilização para a implementação de filtros híbridos, os
quais serão discutidos na seção 2.4.2.4.
44
2.3.2.3.
Principais Estratégias para a Obtenção dos Sinais de
Compensação para os Filtros Ativos
A obtenção dos sinais de referência a serem sintetizados pelo conversor para a realização da
compensação harmônica representa um componente de grande importância para que seja
assegurada a operação correta do filtro ativo. A obtenção da estimativa do sinal de referência
é iniciada a partir da medição dos sinais essenciais de tensão ou corrente, de forma que seja
possível obter de forma precisa a informação sobre as variáveis de interesse. Tipicamente, a
tensão da fonte CA, a tensão do barramento CC do inversor e a tensão de saída do
transformador de interface são adquiridas. As variáveis de corrente típicas são: corrente de
carga, da fonte, de compensação e no link CC. Baseado nesses sinais de feedback, os sinais
de referência em termos de níveis de tensão ou corrente harmônicos são estimados no
domínio do tempo ou no domínio da freqüência.
A figura 9, adaptada de [35] apresenta as principais técnicas de estimação de sinais de
referência, as quais podem ser divididas em dois grupos principais: técnicas baseadas em
análise no domínio do tempo e técnicas baseadas na análise no domínio da freqüência. Uma
classificação semelhante também é utilizada em [48]. Neste último é realizada uma
comparação, em termos de resultados de simulação, de desempenho entre as várias técnicas
tanto no domínio do tempo quanto das técnicas baseadas no domínio da frequência.
Em suma, as técnicas baseadas no domínio da freqüência são baseadas no princípio de análise
de Fourier. Em princípio, a transformada rápida de Fourier (FFT) é aplicada ao sinal
amostrado de tensão ou corrente e então as componentes harmônicas são separadas da
componente fundamental. A transformada inversa de Fourier é então aplicada para estimar o
sinal de referência para o conversor PWM responsável por sintetizar a grandeza de controle
[33], [35], [48]. A principal desvantagem das técnicas baseadas no uso da transformada de
Fourier é o atraso, de meio a um ciclo de rede, relacionado ao processo de amostragem e
cálculo dos coeficientes de Fourier, o que é especialmente crítico para cargas elevada
dinâmica [13], [33], [35], [48]. Algumas modificações foram propostas com o objetivo de
acelerar o processamento, como em [49], onde somente a componente fundamental é
calculada e utilizada para separar as componentes harmônicas do sinal amostrado.
45
Figura 2.8: Estratégias para obtenção dos sinais de referência para compensação
harmônica.
As técnicas baseadas no domínio do tempo foram identificadas como as mais difundidas na
literatura sobre filtros ativos e são baseadas na estimação instantânea dos sinais de referência
na forma de uma tensão ou corrente a partir de sinais instantâneos medidos no sistema.
Embora sejam baseados no uso de transformações de coordenadas [48], [49] ou na integração
de grandezas para cálculo de potências médias, esses métodos mantém seu fundamento na
obtenção de funções no domínio do tempo ao invés da realização de transformações no
domínio da freqüência como nos métodos baseados na transformada Fourier.
A teoria das potências ativa e reativa instantâneas (p-q) foi proposto por Akagi et. al. [9],
[50], [51], [52]. A teoria é baseada na transformação αβ0 a qual representa grandezas
trifásicas no sistema estacionário αβ0. A partir destas quantidades transformadas as potências
reativa e ativa instantâneas da carga não-linear são calculadas (utilizando-se a equação (2.3)),
as quais consistem de uma componente CC e uma componente CA [53]. A componente CA é
extraída utilizando um filtro passa altas e a aplicação da transformada inversa resulta na
obtenção dos sinais de referência para compensação harmônica. Alternativamente [35], ao
46
invés das componentes CA serem extraídas, as componentes CC são extraídas utilizando-se
filtros passa-baixa e aplicando-se a transformação inversa para obter os sinais de
compensação.
p 0 v 0
pαβ = 0
q 0
αβ
0
vα
− vβ
0 i0
v β ⋅ iα
vα i β
(2.3)
Para aplicar o teorema p-q em sistemas monofásicos, algumas modificações no teorema
original foram propostas, conforme apresentado por Dobrucky [54]. Assumindo que a tensão
da fonte (vs) e a corrente de carga (iL) de um sistema monofásico são definidos como:
vs (t ) = 2Vs sin(ωt )
(2.4)
iL (t ) = 2 I L sin(ωt + θ )
(2.5)
Incluindo um deslocamento de fase de 90°, obtém-se a tensão e correntes complementares,
definidas como:
v 's (t ) = 2Vs sin(ωt − 90°)
(2.6)
i 'L (t ) = 2 I L sin(ωt + θ − 90°)
(2.7)
As componentes no sistema ortogonal αβ são obtidas como:
vα = vs (t )
e
vβ = v 's (t )
(2.8)
iα = iL (t )
e
iβ = iL' (t )
(2.9)
Portanto, a potência ativa instantânea da carga pode ser calculada como:
p = vα iα + vβ iβ = p + ~
p
(2.10)
A potência reativa instantânea pode ser escrita como:
q = vα iβ − vβ iα = q + q~
(2.11)
47
~ ~
As componentes CA das potências ativa e reativa instantânea ( q e p ) são extraídas
utilizando-se filtros passa altas. As componentes CA são utilizadas para gerar os sinais de
referência para a compensação de harmônicos.
O teorema da detecção síncrona [55] é similar ao teorema p-q. Esta técnica é aplicável
somente para sistemas trifásicos e sua operação considera o fato de que as correntes trifásicas
são balanceadas. Ele é baseado na idéia de que o filtro ativo força a corrente da fonte a ser
senoidal e em fase com a fonte, independentemente das variações da carga. A potência média
é calculada e dividida igualmente entre as três fases. O sinal de referência é então
sincronizado relativo à tensão na fonte de cada fase.
A teoria do sistema de referência síncrono é baseada no uso transformação de Park, a qual
transforma o sistema trifásico de variáveis de tensão e corrente em um sistema síncrono
girante [33], [35], [43], [46], [56], [57], [58], [59]. Nesta técnica, é utilizado um sistema de
coordenadas (dq) girando à velocidade síncrona sobre o qual as grandezas elétricas de
interesse (correntes, por exemplo) são referenciadas. Como resultado, as componentes
fundamentais são transformadas em quantidades CC as quais são separadas das quantidades
harmônicas utilizando-se filtros passa-baixas. É possível, como comentado em [57] e também
utilizado neste trabalho, aplicar a transformação de Park utilizando-se um conjunto de
referenciais girantes em cada freqüência harmônica desejada. Dessa forma deve-se para cada
harmônica aplicar filtro passa-baixa para determinar sua amplitude. Uma desvantagem da
utilização de referenciais síncronos é a necessidade de implementação de algoritmos PLL para
a determinação do ângulo de fase utilizado como referência para o cálculo da transformação
de referenciais.
Originalmente as técnicas baseadas na transformação para referencial síncrono são aplicadas
somente a sistemas trifásicos, porém, em [60] e [61] é apresentada uma estratégia para a
emulação de sistemas trifásicos com o objetivo de aplicar a técnica a sistemas monofásicos. O
cálculo das grandezas de interesse é instantâneo porém existe um atraso inerente à utilização
dos filtros para obtenção das quantidades CC.
O teorema da multiplicação por seno é baseado no processo de multiplicar a corrente de carga
não-linear por uma senoide na frequência fundamental e integrando o resultado para calcular a
componente fundamental real da corrente de carga [33], [34], [35], [62]. Esta técnica é
48
aplicável a sistemas trifásicos e monofásicos. A diferença entre a corrente instantânea da
carga e a componente fundamental é usada como referência para a compensação harmônica.
Embora esta técnica elimine o atraso relativo ao uso de filtros, seu desempenho ainda é lento
devido ao processo de integração e amostragem, de forma a ter desempenho similar às
técnicas baseadas na análise de Fourier [35].
2.3.2.4.
Filtros Híbridos
Para a redução do custo dos filtros ativos propõem-se a utilização de filtros híbridos, que
consistem de uma combinação entre filtros passivos e filtros ativos [9], [21], [22], [63], [64].
Além da redução de custo, a utilização de filtros híbridos apresenta desempenho superior,
uma vez que a parte passiva do filtro pode ficar responsável por compensar uma maior parcela
de reativos e/ou eliminar uma determinada componente harmônica e o filtro ativo faria a
compensação final, garantindo uma compensação dinâmica ótima do sistema.
As principais configurações de filtros híbridos são:
•
Filtro passivo paralelo combinado com filtro ativo paralelo, conforme indicado na
figura 2.9 – a, onde o filtro ativo compensa as harmônicas de corrente de baixa
ordem e o filtro passivo compensa as harmônicas de alta freqüência [35], [36],
[56], [65], [66]. De fato, do ponto de vista de opções no mercado, este é o filtro
híbrido mais aplicado em campo na compensação de sistemas em baixa tensão.
•
Filtro ativo série combinado com filtro passivo paralelo [9], [21], [62], [65], [67],
[68], [69], [70] conforme apresentado na figura 2.9 - b. Neste caso o filtro ativo
série atua como uma impedância variável de maneira que o filtro passivo passa a
ter uma característica praticamente ideal. Duas características são conseguidas com
este tipo de configuração: o filtro passivo apresenta uma característica de
impedância mínima para a harmônica de corrente em questão e a impedância da
rede apresenta valor máximo com o objetivo de bloquear o fluxo de componentes
harmônicas para a fonte. As ressonâncias entre o filtro passivo e a impedância da
rede são eliminadas.
•
Filtro ativo conectado em série com o filtro passivo paralelo, como apresentado na
figura 2.9 - c. Neste caso o filtro híbrido, conectado em paralelo com a carga passa
a ter uma característica de filtragem praticamente ideal [9], [21], [71], [43], [57],
49
[59], [63], [64], [65], [72], [73], [74], de forma que a parcela ativa compensa os
desvios associados ao filtro passivo. Esta alternativa é a mais indicada para a
compensação em sistemas em média e altas tensões, uma vez que a tensão
suportada pelo filtro ativo é, tipicamente, da ordem de 1 a 5% da tensão nominal
do sistema. Essa alternativa de filtro híbrido é a mais discutida na literatura,
conforme indicado nas referências citadas.
Figura 2.9: Filtros híbridos:
a) Filtro híbrido ativo paralelo combinado com filtro passivo paralelo.
b) Filtro ativo série combinado com filtro passivo paralelo.
c) Combinação série, instalada em paralelo com a carga, de filtro passivo e filtro ativo
série.
50
Embora a maioria das referências sobre filtros híbridos que utilizam filtro ativo série
utilizarem o transformador funcionando, praticamente, como um transformador de corrente,
de forma que a tensão fundamental seja praticamente nula, trabalhos recentes [62], [71] têm
utilizado a indutância de magnetização do transformador como elemento para inserção da
tensão harmônica de controle. Nesses trabalhos como mostrado na figura 2.10 (adaptada de
[71], o conversor injeta no secundário do transformador apenas correntes harmônicas (i2),
funcionando como um circuito aberto para a fundamental, assim, a indutância de
magnetização é inserida em série com o sistema de potência, o que implica numa queda de
tensão não desprezível na freqüência fundamental. Essa queda é minimizada projetando-se o
transformador para obter-se um valor reduzido para a indutância de magnetização. Essa
alternativa possui uma grande vantagem do ponto de vista do conversor , uma vez que o
mesmo não necessita suprir a componente fundamental da corrente no sistema. Por outro lado,
uma vez que o transformador deve suportar a queda de tensão relativa a passagem da corrente
fundamental pela indutância de magnetização, o volume desse transformador deverá ser maior
em relação às abordagens anteriores.
Figura 2.10: Utilização da indutância de magnetização do transformador para síntese de
tensão harmônica de controle: implementação física e circuito equivalente.
A necessidade de utilização de indutores controláveis para a implementação de filtros híbridos
também têm levado a caminhos alternativos para a sua implementação. Em [66] uma estrutura
baseada em um indutor ajustado mecanicamente, através de um sistema de controle de
posição, é utilizada para o ajuste da sintonia de um filtro harmônico híbrido. Essa abordagem
leva à necessidade de construção mecânica especial, a qual é baseada na variação da
indutância a partir do controle de posição angular entre um enrolamento fixo e um núcleo
magnético móvel, como mostrado na figura 2.11. Além da construção mecânica especial,
51
ainda é necessário um sistema de posicionamento de precisão, que torna sua aplicação pouco
interessante para produção em série.
Figura 2.11: Indutor mecanicamente variável proposto em [66].
2.4. Bancos de Capacitores para Correção de Fator de Potência e
Harmônicos
2.4.1. Tecnologias
Bancos de capacitores na indústria não são diretamente associados com o processo produtivo
e é comum que sua necessidade seja reconhecida pelos gerentes industriais apenas através de
multas por operação em baixo fator de potência [75] aplicadas pela concessionária de energia
elétrica. Duas tecnologias de capacitores são amplamente aplicadas em sistemas para correção
de fator de potência: capacitores de filme polipropileno metalizado (capacitores a seco)
capacitores de filme polipropileno impregnados a óleo.
Normalmente, por causa do custo de aproximadamente 30% em relação aos capacitores
impregnados a óleo, os capacitores de filme polipropileno metalizado – PPM são a primeira
escolha quando o objetivo é satisfazer os requisitos de fator de potência impostos pelas
concessionárias de energia elétrica. Os fabricantes desta tecnologia de capacitores
normalmente recomendam sua utilização em níveis máximos de corrente e tensão harmônica
limitados a 10-15% e 2-5%, respectivamente, embora seja muito comum que a aplicação de
52
bancos de capacitores resulte em níveis maiores de distorção, quando da presença
significativa de cargas não-lineares, levando a freqüentes falhas nos capacitores e outros
componentes do sistema.
2.4.2. Considerações de Custo Relacionadas à Correção de Fator de
Potência na Presença de Harmônicos
Com o objetivo de esclarecer a necessidade de soluções com melhor relação custo-benefício
para compensação reativa na presença de harmônicos, é interessante realizar uma comparação
de custos considerando soluções desde bancos de capacitores puros e avançando em direção
às alternativas onde harmônicos são tratados numa ordem crescente de complexidade
tecnológica e desempenho [36]. A tabela 2.8 mostra os dados de comparação de custo baseada
numa demanda de potência reativa de 200kVAr em 440V, considerando que o primeiro caso
(banco de capacitores puros), implica numa condição de ressonância. Nesse trabalho não será
tratado o estudo de caso detalhado mas sim considerar-se-á um cenário exemplo comumente
encontrado na indústria como comentado em [36]. Os custos foram obtidos a partir de
cotações realizadas em fornecedores localizados no Brasil.
Tabela 2.8: Comparação de custos de soluções para correção de fator de potência na presença
de harmônicos.
Solução
1
2
3
4
5
Banco de Capacitores (4 estágios)
Banco de Capacitores (4 estágios)
Filtro Dessintonizado (4 estágios)
Filtro Sintonizado (na 5a harmônica)
Filtro Ativo + Banco de Capacitores
Tecnologia dos
Capacitores
PPM
Impregnado em óleo
PPM
Impregnado em óleo
PPM
Custo
(%)
100
176
200
333
542
Peso
(%)
100
178
376
475
347
O primeiro caso apresentado na tabela 2.8 é a condição base onde o banco de capacitores de
menor custo é instalado, porém, sua operação leva a ocorrência de níveis harmônicos
inaceitáveis para os capacitores PPM. A segunda solução é o caso onde são utilizados
capacitores impregnados em óleo em substituição aos capacitores PPM. Nesse caso,
considera-se que é possível realizar a compensação de fator de potência desconsiderando-se
os efeitos das harmônicas nos componentes do sistema. Os capacitores impregnados a óleo
são projetados para suportar elevados níveis de distorção harmônica e normalmente são
aplicados na implementação de filtros passivos de harmônicas .
53
A terceira opção da tabela é baseada no uso de capacitores PPM com reatores de bloqueio
instalados em cada estágio, de forma que o fluxo de harmônicas pelos capacitores seja
minimizado. Essa solução necessitaria, por exemplo, de 12 reatores em um banco automático
de 12 estágio, o que torna a solução final extremamente cara e volumosa. A solução quatro
consiste na implementação de filtros LC os quais são também responsáveis por fornecer a
energia reativa necessária para correção de fator de potência. Esta solução é baseada na
utilização de capacitores impregnados a óleo e reatores série os quais devem ser
adequadamente projetados de forma a suportar as perdas adicionais relacionada ao conteúdo
harmônico que passa pelo filtro. O reator é um componente crítico nesta solução impactando
significativamente no volume e custo, sendo altamente recomendado monitorar sua
temperatura com o objetivo de evitar uma possível falha de origem térmica.
A solução 5 é baseada na utilização de um filtro ativo paralelo, responsável pela compensação
harmônica, combinado com um banco de capacitores com tecnologia PPM para correção de
fator de potência. A corrente nominal do filtro ativo foi especificada em 100A e é capaz de
reduzir a distorção harmônica de 50 para 5% na base de 200kVA.
O cenário apresentado na tabela II é bastante desafiador, do ponto de vista de custo. Ela
demonstra que um sistema de correção de fator de potência pode ter uma ampla faixa de custo
e ilustra claramente a razão do fato de que alguns gerentes industriais preferem incluir o custo
de substituição de capacitores no orçamento de manutenção, ao invés de investir em um
estudo detalhado de fluxo harmônico e na aquisição de equipamento para mitigação, o qual
não está diretamente associado à produtividade da empresa. Adicionalmente, o espaço físico
industrial é um ativo de custo elevado, de forma que é difícil alocar recursos para
disponibilizar espaço para instalação de um equipamento volumoso e pesado, especialmente
em instalações antigas.
Como discutido em [36] e [40], a solução mais cara pode não ser, necessariamente, a mais
adequada para cada caso específico, mas, mesmo a solução mais simples para a correção de
fator de potência que contempla a convivência com harmônicos (solução 2 da tabela)
apresenta um acréscimo de custo significativo quando comprado à solução básica com
capacitores PPM. Nossa proposta neste trabalho é introduzir uma alternativa com elevada
flexibilidade e boa relação custo-benefício, obtendo as vantagens dos filtros de-sintonizados e
sintonizados, porém com características de menor custo e volume. O sistema de acoplamento
54
é projetado para permitir uma rápida avaliação em campo de diferentes configurações de
forma a permitir a escolha da estratégia mais efetiva para cada caso específico.
2.4.3. Compensação Harmônica Série-Paralela Distribuída
O conceito de compensação harmônica distribuída pode ser entendido observando-se a figura
2.12. Esse conceito foi utilizado anteriormente em [18], porém considerando-se apenas a
compensação baseada na utilização de filtros ativos paralelos para supressão de ressonância
harmônica. O objetivo é introduzir compensação harmônica em diferentes pontos de um
sistema de distribuição, de forma a minimizar a potência total requerida para a compensação
harmônica utilizando-se características de bloqueio e drenagem harmônica. Por exemplo, na
figura 2.12, a impedância ativa 1 é usada para bloquear o conteúdo harmônico originado das
cargas não-lineares evitando seu fluxo pelo banco de capacitores, a impedância ativa 2 é
utilizada para introduzir um caminho de baixa impedância para o fluxo harmônico de forma a
desviar parte da corrente harmônica direcionando-a para a fonte B, compartilhando a corrente
harmônica com a fonte A, minimizando a distorção harmônica nesta última. Assim, dada a
flexibilidade introduzida pelo sistema de acoplamento proposto, diferentes estratégias podem
ser diretamente avaliadas em campo de forma a obter a solução mais efetiva.
Figura 2.12: Conceito de compensação harmônica série-paralela distribuída.
É interessante salientar que o conceito de impedâncias distribuídas é discutido em [76], [77],
[78], porém, nessas referências o foco é voltado para o controle de fluxo de potência na
freqüência fundamental.
55
2.5. Filtros Ativos Comerciais no Brasil
Do ponto de vista comercial, existe um número razoável de fabricantes que comercializam
filtros ativos, embora o número seja bem inferior aos fabricantes de inversores de frequência
para acionamento de motores. A maioria dos fabricantes de filtros ativos possuem tradição no
fornecimento de soluções em sistemas de energia, acionamentos elétricos, UPS ou
componentes elétricos, tais como ABB, Schneider-Electric, EPCOS, APC e RTA por
exemplo. Alguns fabricantes onde o principal produto era relacionado à filtragem ativa de
harmônicos têm sido absorvidos por fabricantes maiores, como foi o caso da BlueWave e
APC, os quais foram abarcados pela Schneider-Electric e Schaffner, respectivamente. O único
fabricante brasileiro identificado é a RTA, que, embora em seu site tenha dados de filtros para
aplicação em até 690V, informa da possibilidade de aplicação em sistemas de 13,8kV, o que é
implementado, provavelmente a partir da utilização de transformador.
As tabelas 2.9 e 2.10 mostram um levantamento dos principais fabricantes de filtros ativos
encontrados no mercado, incluindo os modelos, faixas de aplicação e características
principais. Apenas os filtros paralelos foram encontrados como itens de série em todos os
fabricantes pesquisados. A proposição de filtros híbridos somente é brevemente citada por
alguns fabricantes e, nesses casos, somente está relacionada à utilização de filtros passivos
paralelos sintonizados em conjunto com o filtro ativo paralelo.
Do ponto de vista de funções de controle, a maioria dos fabricantes implementa em seus
modelos a possibilidade de seleção entre compensação global, onde todos os harmônico
dentro da capacidade do filtro são compensados, ou compensação seletiva, onde o nível de
compensação para cada harmônico de interesse é programada. Outras funções comuns são a
compensação de reativos na frequência fundamental e o balanceamento de carga entre fases.
A maioria dos fabricantes disponibiliza modelos para compensação em sistemas a três e
quatro fios (3 fases + neutro).
56
Tabela 2.9: Filtros Ativos no Mercado – Modelos, fabricantes e capacidades
Modelo
Fabricante
Corrente
Tensão
PQF/PQFI/PQFS/PQFM
ABB
250 A, 450 A
208 ≤ U ≤ 480V
180 A, 320A
408 ≤ U ≤ 690V
StacoSine
Staco Energy
Products Co. (US)
25-200 A
480 V (690 com uso
de transformador)
AIM
AIM Europe (UK)
25 a 400A;
208-600V
100, 200 A
690Vca
ECOsineTM
Schaffner
30 a 300A
380 - 480 V
Danfoss
10 a 400A
AccuSine® PCS
Schneider-Electric
50 A, 100 A e 300 A
208-480V
AHF6000
EPCOS
50, 100 e 300A
380-480Vca
MGETM SineWave
APC (Schneider)
20/30/45/60/90/120A
400V
FILTERON
RTA
25 a 800 A
220/380/480/690V
AHF 005/010
VLT® AAF006
380 – 480V (60Hz)
380 – 690V (50Hz)
Tabela 2.10: Filtros Ativos no Mercado – Principais funções
Modelo
Faixa de
Compensação
Tipo de Compensação
Capacidade para
compensação de
reativos
PQF/PQFI/PQFS/PQFM
2ª à 50ª
3/4 fio- Seletiva
sim
StacoSine
3ª à 51ª
3/4 fios - Global/Seletiva
sim
AIM
2ª à 51ª
¾ fios - Global
sim
ECOsineTM
até 50ª
3 fios / Global/Seletiva
sim
*
3 fios
*
AccuSine
2ª à 50ª
3 fios/Global
sim
AHF6000
2ª à 50ª
-
-
MGETM SineWave
2ª à 25ª
3 fios / Global/Seletiva
sim
FILTERON
-
3 ou 4 fios/
sim
AHF 005/010
VLT VLT® AAF006
57
Figura 2.13: Linha PQFI de filtros ativos ABB
Figura 2.14: Linha PQFM de filtros ativos ABB.
58
Figura 2.15: Filtro ativo StacoSine – STACO
Figura 2.16: Linha AIM AHF – AIM Europe
59
Figura 2.17: Filtros Ativos ECOsine (Bluewave) – Schaffner.
Figura 2.18: Filtros Ativos AHF/VLT - Danfoss
60
Figura 2.19: Filtros Ativos AccuSine – Schneider-Electric.
Figura 2.20: Filtro Ativo AHF6000 – EPCOS
Figura 2.21: Filtro Ativo MGETM SineWave – APC/Schneider-Electric
61
Figura 2.22: Filtro Ativo FILTERON – RTA
2.6. Conclusão
Neste capítulo foi apresentada uma discussão geral sobre harmônicos, abordando os principais
padrões nacionais e internacionais e as principais soluções para a mitigação da distorção
harmônica. Também foi apresentada uma pesquisa bibliográfica sobre filtros ativos e híbridos.
Foram apresentadas as topologias e estratégias divulgadas na literatura e ainda uma pesquisa
de mercado que evidencia a preponderância dos filtros ativos paralelos.
Outro importante tópico abordado no capítulo foi a correção de fator de potência na presença
de harmônicos. Nesta área destaca-se o fato de que as soluções atualmente implementadas se
situam em uma ampla faixa de custo. Mesmo a solução mais simples, baseada apenas no uso
de reatores de bloqueio representa um custo significativamente alto quando comparado ao
custo de um banco de capacitores básico utilizado para apenas a compensação reativa.
Também foi introduzido no capítulo o conceito de compensação harmônica série-paralela
distribuída, o qual se baseia na utilização de um único tipo de dispositivo para a
implementação de compensação harmônica, ora agindo como fonte de tensão série, ora
funcionando em conjunto com um banco de capacitores para drenar corrente harmônica.
Capítulo 3
Impedâncias Harmônicas Ativas
3.1. Introdução
Este capítulo trata efetivamente da descrição da implementação do sistema de síntese e
inserção de impedâncias harmônicas ativas associadas ao conversor série proposto. O objetivo
principal do capítulo é apresentar de forma detalhada as estruturas implementadas e
respectivas estratégias de controle do sistema a partir do desenvolvimento das equações e
diagramas descritivos.
Na seção 3.2 é realizada a descrição geral do sistema proposto, considerando uma abordagem
monofásica. Os algoritmos PLL (phase locked loop) para a obtenção de amplitude, freqüência
e fase da componente fundamental e harmônica da corrente no sistema elétrico de interesse
são apresentados na seção 3.3. O desenvolvimento do cálculo da referência de tensão para a
síntese da impedância harmônica ativa é apresentado na seção 3.4, incluindo uma abordagem
referente à introdução de amortecimento ativo e uma proposição para a compensação
simultânea de múltiplas componentes harmônicas.
Também são apresentados, nas seções 3.5 e 3.6, os aspectos relacionados ao conversor de
frequência – controle do barramento CC e dimensionamento do conversor. Na seção 3.7 é
apresentada uma abordagem analítica para estudo e projeto básico do transformador coaxial
utilizado para o acoplamento do conversor. Também é apresentada uma análise experimental
de um protótipo do transformador coaxial. A análise é realizada a partir dos ensaios em curto
e em vazio para levantamento de parâmetros de circuito equivalente do transformador. Uma
proposta de proteção contra curto-circuito no sistema de potência e a proposição de
implementação trifásica do conversor são abordadas nas seções 3.8 e 3.9, respectivamente.
.
3.2. Concepção do Sistema
O conversor proposto neste trabalho implementa uma impedância harmônica ativa a qual é
definida como uma fonte controlada, via conversor estático, que implementa uma relação
64
específica entre a tensão e a corrente que percorre o secundário do transformador utilizado
para acoplamento. Esta relação é definida, de forma independente da freqüência fundamental,
para uma ou mais freqüências harmônicas presentes no sistema elétrico de interesse. A
principal característica inovadora deste sistema é a flexibilidade introduzida pela utilização de
transformadores coaxiais para o acoplamento com o sistema elétrico de interesse, conforme
pode ser visualizado na versão monofásica apresentada na figura 3.1, onde o secundário do
transformador axial é constituído pelo próprio cabo de potência existente no sistema elétrico
de interesse. O uso de transformadores coaxiais para a inserção de impedâncias no sistema
elétrico foi proposto por Harjeet Johal e Deepak Divan nas referências [76], [77] e [78],
porém nestas o foco foi dado no controle do fluxo de potência na freqüência fundamental,
tendo o objetivo de direcionar a potência de pontos de geração específicos para consumidores
específicos, de forma a viabilizar um mercado para a comercialização de energias renováveis.
Figura 3.1: Sistema para implementação de uma impedância harmônica ativa monofásica.
65
Na figura 3.2 é apresentado o diagrama em blocos do sistema proposto. O funcionamento do
sistema é baseado na medição da corrente Is no secundário do transformador coaxial (cabo de
potência) e utilização de um algoritmo PLL (phase locked loop) para a obtenção da amplitude
e fase da componente fundamental da corrente. A componente fundamental estimada - If^ é
subtraída da corrente medida e o resultado - Ih^ é aplicado na entrada de outro PLL
monofásico, sintonizado para estimar a fase θh, a frequência ωh e amplitude Iqh_flt, da
componente harmônica de interesse - h.
Os algoritmos PLL utilizados são baseados na aplicação das transformações de Park para o
tratamento das grandezas de interesse no referencial síncrono, tendo como princípio de
rastreamento a anulação da componente de eixo direto (eixo d na figura 3.8) resultante da
aplicação da transformação [60]. Dessa forma, a componente de eixo em quadratura resultante
(eixo q na figura 3.8) é equivalente a amplitude da grandeza rastreada. Na seção 3.3 será
discutida a implementação dos PLLs utilizados neste trabalho.
Figura 3.2: Diagrama geral em blocos da implementação da impedância harmônica ativa.
A impedância harmônica a ser sintetizada neste trabalho é constituída por uma reatância
indutiva, sendo representada por uma indutância L* obedecendo à equação:
66
Vh (t ) = L*
dI h
dt
(3.1)
Onde Ih é a componente harmônica de ordem h da corrente a ser compensada.
Neste trabalho a implementação da equação 3.1 é realizada no referencial síncrono utilizandose a transformação de Park. Considera-se que a corrente Is, que circula no secundário do
transformador coaxial, corresponde à componente de eixo α referente à transformação de
Clark, conforme descrito na implementação do PLL monofásico apresentado na seção 3.3. O
cálculo da tensão a ser sintetizada para a implementação da impedância harmônica ativa será
descrito detalhadamente na seção 3.4.
3.3. Implementação dos Algoritmos PLL (Phase Locked Loop)
No sistema em desenvolvimento são necessários dois algoritmos PLL distintos: um para a
obtenção da amplitude, freqüência e fase da componente fundamental da corrente e outro com
o objetivo de obter os mesmos parâmetros para a componente harmônica de interesse. Na
literatura são encontradas diversas alternativas de implementação de algoritmos PLL [61],
[79] entre as quais têm se destacado a utilização do método das transformações de
coordenadas para a utilização de referenciais síncronos [60], [80],[81], [79], [82].
Em [79] são apresentadas e comparadas outras alternativas para a implementação de
algoritmos PLL: o método do atraso de tempo, baseado na obtenção de um sinal idêntico à
tensão de entrada atrasada de 90° e anulação do cálculo da potência média no referencial
estacionário, o método “rms” convencional, baseado no cálculo do valor eficaz da tensão de
entrada e estimação da tensão de pico, e o método “rms” bifásico de referencial estacionário,
semelhante ao método “rms” convencional, porém é gerada uma componente de tensão
adicional para o cálculo geométrico do valor de pico da tensão de entrada.
Para o projeto em questão, foi escolhido o algoritmo apresentado na referência [60]. Nas
subseções seguintes são apresentadas as implementações dos dois PLLs utilizados no projeto.
67
3.3.1. PLL para o Rastreamento da Componente Fundamental
Para realizar a implementação da impedância harmônica ativa faz-se necessária a utilização
de um algoritmo capaz de fornecer a amplitude, freqüência e fase da componente fundamental
da corrente no secundário do transformador axial. A estrutura utilizada neste projeto é
mostrada na figura 3.3 .
Figura 3.3: Diagrama em blocos do algoritmo PLL (Phase Locked Loop) monofásico.
Basicamente o PLL simula um sistema trifásico equilibrado utilizando como entrada as
componentes dos eixos α e β (transformação de Clark) do referencial estacionário para a
aplicação da transformação para obtenção das grandezas no referencial síncrono. A
componente β é obtida a partir da componente de eixo q, obtida da transformação de Park
aplicada a um bloco de atraso no qual a constante de tempo é τ [60], [61]. A saída do
algoritmo é a amplitude do vetor representante da corrente de interesse – componente de eixo
q, juntamente com a freqüência e fase do vetor. O alinhamento é garantido a partir do
controlador PI que objetiva manter nula a componente de eixo d calculada pela transformação
de Park.
A sintonia do PLL é baseada no desenvolvimento do modelo para pequenos sinais do sistema
e alocação dos pólos para obtenção de faixa de passagem e característica de rigidez dinâmica
com relação a perturbações na variável de entrada Iα adequados [60]. Para obter uma melhor
resposta com relação à estimativa de amplitude e fase da componente fundamental, a variável
68
de entrada do algoritmo PLL neste projeto é constituída da corrente medida Is subtraída da
estimativa da corrente harmônica – Ih^, conforme apresentado na figura 3.2.
Figura 3.4: Diagrama em blocos do algoritmo PLL (Phase Locked Loop) monofásico
linearizado em torno do ponto de operação Iq,Id e θ0.
O modelo do algoritmo PLL linearizado em torno do ponto de operação Iq,Id e θ0, é
apresentado na figura 3.4. A equação característica que define os pólos do sistema é dada por:
s 2 + k p sI q + k i I q
(3.2)
A partir do diagrama da figura 3.4 é possível calcular a relação que define a característica de
rejeição à pertubações:
2
∆iα s + k p sI q + k i I q
=
∆θ
senθ 0 (k p s + k i )
(3.3)
Os valores dos parâmetros utilizados no projeto em questão são: τ = 0,001s; k = 1; Kp = 314
rad/A/s; Ki = 3,14 rad/A/s2; ωff = 377 rad/s, e os pólos do sistema são: 0,001 e 314 rad/s,. O
processo de modelagem e sintonia do PLL também é apresentado detalhadamente em [60]. A
característica de rigidez dinâmica, considerando um ângulo θ0 = π/4, é apresentada na figura
3.5. Na figura 3.6 são apresentados os resultados de simulação do PLL aplicado a uma onda
composta pela componente fundamental acrescida do quinto e sétimo harmônico, com
amplitudes de 1 p.u., 1 p.u, e 0,1 p.u, respectivamente.
69
Figura 3.5: Avaliação da rigidez dinâmica do algoritmo PLL (θ0 = π/4).
Na implementação do sistema faz-se necessária a utilização de filtros passa-baixa aplicados as
estimativas de amplitude resultantes do algoritmo PLL. Os filtros utilizados no projeto são do
tipo Butterworth de quarta ordem e foram projetados utilizando-se a ferramenta Filter Design
& Analysis do MATLAB, com os seguintes parâmetros de entrada: Fpass = 50Hz; Fstop =
360Hz, Apass =1; Astop = 60dB, Fs = 10kHz. O resultado da aplicação do filtro passa-baixa à
estimativa da amplitude da componente de corrente fundamental é apresentado na figura 3.6.
70
Figura 3.6: Resposta do PLL aplicado para a estimação da componente fundamental de um
sinal composto por 1 pu de fundamental + 1.pu 5° harmônico + 0,1 p.u. de 7° harmônico.
3.3.2. PLL para o Rastreamento da Componente Harmônica
A estrutura utilizada para o rastreamento da componente harmônica de interesse é idêntica a
utilizada para a componente fundamental, mostrada na figura 3.3. Para o sincronismo com a
componente harmônica de interesse são realizadas as seguintes alterações nos parâmetros do
algoritmo PLL: τ = 0,001 s; ωff = 1885 rad/s (5º harmônico), os demais parâmetros não foram
alterados.
A variável de entrada do PLL para a freqüência harmônica é a componente Ih, a qual é obtida
subtraindo-se da corrente medida Is o valor instantâneo da corrente fundamental estimada pelo
PLL sincronizado com componente fundamental, conforme apresentado na figura 3.2. Essa
estratégia foi adotada para reduzir as oscilações resultantes da presença da componente
fundamental no cálculo da amplitude da componente harmônica de interesse, permitindo que
os filtros digitais a serem utilizados nas variáveis de saída dos algoritmos PLL tenham maior
faixa de passagem e menor ordem. Os resultados da estimação de amplitude fornecidos pelos
71
algoritmos PLL serão utilizados, após a filtragem digital, para a síntese da tensão associada à
impedância harmônica ativa de referência e controle da tensão no barramento CC do
conversor. A figura 3.7 apresenta os resultados para estimação da componente de 5°
harmônico do mesmo sinal utilizado para a avaliação do PLL da componente fundamental.
Figura 3.7: Resposta do PLL aplicado para a estimação da componente harmônica.
3.4. Implementação da Impedância Harmônica Ativa
Assim como nos algoritmos PLL utilizados, a equação (3.1) é implementada considerando-se
a emulação de um sistema trifásico equilibrado. O calculo da tensão a ser sintetizada a partir
da equação (3.1) é realizado no referencial síncrono tendo como base o desenvolvimento a
seguir, observando os referenciais de eixos da figura 3.8.
72
Figura 3.8: Referenciais utilizados para os cálculos das transformações de eixos.
A transformação de Park aplicada às componentes α e β é dada por:
I q = I α cos θ h + I β senθ h
(3.4)
I d = I α senθ h − I β cos θ h
(3.5)
θ h = ω h t + φh
(3.6)
onde:
Derivando-se as equações 3.4 e 3.5 com relação ao tempo temos:
dI
dI
= α cos θ h + β senθ h − ω h (I α senθ h − I β cos θ h )
dt dt
dt
(3.7)
dI
dI d dI α
=
senθ h − β cos θ h + ω h (I α cos θ h + I β senθ h )
dt dt
dt
(3.8)
dI q
Assumindo, como aproximação, uma condição de regime permanente :
dI q
dt
=
dI d
=0
dt
(3.9)
73
dI
dI α
cos θ h + β senθ h = ω h I d
dt
dt
(3.10)
dI
dI α
senθ h − β cos θ h = −ω h I q
dt
dt
(3.11)
Com base no desenvolvimento representado pelas equações 3.4 a e 3.11, e reconhecendo que
nas equações 3.7 e 3.8, os termos do primeiro parênteses após o sinal de igualdade
representam a transformação de Park das derivadas das componentes α e β das correntes de
interesse, as componentes da tensão a ser sintetizada são calculadas, no referencial síncrono,
da seguinte forma [57]:
Vqh = ω h L* I dh
(3.12)
Vdh = −ω h L* I qh
(3.13)
Aplicando-se a transformação inversa de Park ao resultado das equações 3.12 e 3.13 e
tomando-se a componente de eixo α, obtém-se a equação 3.14 que representa a referência de
tensão a sintetizada pelo modulador PWM, responsável pela injeção da tensão associada à
impedância (indutância) harmônica ativa de referência - L*.
Vh = Vα = −ωL* I qh senθ h
(3.14)
Na seção 3.8 são apresentados os resultados de simulação da aplicação da equação 3.14 para a
implementação do sistema de impedância harmônica ativa. Resultados práticos preliminares
serão apresentados no capítulo 4.
3.4.1. Introdução de Amortecimento Ativo
A introdução de amortecimento ativo pode ser obtida a partir da inclusão na equação 3.14 de
um termo em fase com a corrente harmônica de interesse, conforme a equação 3.15. A
introdução de amortecimento ativo implica em demanda de energia do barramento CC do
inversor além da compensação das perdas nos componentes do compensador. Essa energia
adicional deve ser contrabalanceada pela geração de uma tensão na freqüência fundamental. A
geração da tensão para o balanço de energia é baseada na malha de controle de tensão do
74
barramento CC, descrita na seção 3.5. O amortecimento ativo contribui para a estabilização da
compensação principalmente em condições prévias de ressonância contribuindo para otenção
uma resposta amortecida para a tensão de compensação e respectiva corrente harmônica
compensada.
Vh = Vα = Ra I qh cos θ h − ωL* I qh senθ h
(3.15)
É importante observar que é preciso observar o compromisso, do ponto de visa da densidade
de fluxo no transformador, em relação à geração simultânea de tensão para compensação
harmônica e tensão na freqüência fundamental para o controle do barramento CC. Outro
ponto a observar é que, considerando a utilização de abordagem monofásica para o
compensador e ainda a existência de desequilíbrio entre fases na corrente harmônica a
introdução de amortecimento ativo implica na introdução de sequência negativa de tensão na
freqüência fundamental, porém, como será discutido no projeto do transformador, o projeto
irá considerar somente uma pequena tensão na freqüência fundamental de valor inferior a 1V
eficaz, o implicaria em um sistema com tensão de fase nominal de 220V (380V de linha) em
um desequilíbrio máximo injetado da ordem de 0.5%.
3.4.2. Compensação Simultânea de Harmônicos
Para ilustrar a possibilidade do sistema proposto ser utilizado para a compensação de
múltiplos harmônicos um diagrama de blocos considerando a compensação de quinto e sétimo
harmônicos é apresentado na figura 3.9. Neste diagrama nas variáveis de entrada de cada PLL
é efetuado um desacoplamento das grandezas harmônicas estimadas. Assim, para o
rastreamento da componente de quinto harmônico, por exemplo, o sinal de referência para o
PLL consiste no sinal de corrente medido no sistema subtraído das estimativas da corrente na
freqüência fundamental e da estimativa da corrente de sétimo harmônico. Raciocínio
semelhante é implementado para o rastreamento da componente de sétimo harmônico.
75
Figura 3.9: Diagrama de blocos para compensação simultânea de 5° e 7° harmônicos.
Embora a figura 3.9 apresente a compensação simultânea de dois harmônicos ela resume a
estratégia para a compensação de múltiplos harmônicos. Assim, para cada harmônico a ser
compensado é necessário a adição de um algoritmo PLL específico. Quanto menor a
amplitude do harmônico de interesse menos importante torna-se a realização do
desacoplamento, uma vez que sua projeção em outro referencial diminui conforme sua
amplitude seja reduzida.
3.5. Controle do Barramento CC do conversor
O controle da tensão no barramento CC é um item de grande importância para o
funcionamento de qualquer esquema de filtragem ativa baseado em conversor VSI. O
76
desempenho do sistema de controle da tensão no barramento CC deve garantir que não ocorra
interação desta malha com o controle da tensão de saída associada à componente harmônica
de interesse [58], [83].
Figura 3.10: Controle da tensão no barramento CC do conversor.
O sistema de controle do barramento CC do inversor monofásico utilizado neste projeto é
apresentado novamente na figura 3.10. A energia necessária para manter o barramento
carregado é obtida a partir da geração de uma tensão em fase (ou em oposição de fase) com a
corrente fundamental que circula no secundário do transformador coaxial. Semelhante às
estratégias apresentadas em [33], [34], e [83] é utilizado um controlador tipo proporcionalintegral para a regulação da tensão Vcc, com a diferença que neste trabalho é gerada uma
tensão em fase com a corrente fundamental obtida a partir do algoritmo PLL e nas referências
citadas é gerada uma referência de corrente em fase com a tensão obtida pela utilização de
PLL, semelhantemente às estratégias utilizadas em [21], [57], [72], e [73].
A sintonia da malha de controle de tensão no barramento CC é baseada na obtenção do
modelo para pequenos sinais do sistema para a determinação dos ganhos do controlador PI. A
obtenção do modelo de pequenos sinais é necessária devido à relação não-linear entre a tensão
do barramento CC e a potência drenada no lado CA conversor .
Em [58] é apresentada uma estratégia baseada no controle do quadrado da tensão no
barramento CC do conversor com o objetivo de facilitar a modelagem da malha de controle.
Em [32] é apresentada uma estratégia baseada no uso de lógica Fuzzy. Uma vez que a banda
passante da malha de controle da tensão do barramento CC seja pequena o suficiente para não
interagir com o controle das freqüências harmônicas geradas pelo conversor, não foi
identificada, a partir da análise dos resultados apresentados nas referências citadas, diferença
77
significativa entre as estratégias pesquisadas. A seguir é apresentado o desenvolvimento do
modelo para pequenos sinais referente à estratégia de controle utilizada no projeto em
desenvolvimento.
A referência de tensão fundamental na saída do conversor para o controle do barramento CC é
dado por:
(3.16)
v f (t ) = g (t )i1 (t )
A potência instantânea, associada à componente fundamental na saída do conversor é:
P (t ) = v1 (t )i1 (t ) = g (t )i12 (t )
P (t ) = g (t ) I p2 cos 2 (ωt ) = g (t ) I p2
1
(1 + cos(2ωt ) )
2
(3.17)
(3.18)
A potência instantânea na saída do conversor deve balancear a variação da energia
armazenada no capacitor do barramento CC, a qual ocorre devido à troca de energia na
frequência harmônica, assim temos:
g (t ) I p2
1
(1 + cos(2ωt ) ) = − 1 C d vcc2 (t )
2
2 dt
(3.19)
Para obter o modelo de pequenos sinais consideramos que as variáveis de interesse são
compostas por uma parcela definida para regime permanente e uma parcela relativa à
pequenas perturbações:
vcc = VCC + ∆vcc (t )
(3.20)
v1 = V1 + ∆v1 (t )
(3.21)
i1 = I 1 + ∆i1 (t )
(3.22)
g = G0 + ∆g (t )
(3.23)
Substituindo-se as equações 3.20 a 3.23 na equação 3.18 obtém-se:
78
∆g (t ) I 12 (1 + cos(2ωt )) = −CVcc
d
∆vcc (t )
dt
∆vcc ( s )
I2
=− 1
∆g ( s )
CVcc s
(3.24)
(3.25)
A malha fechada para o controle do barramento CC, baseada no modelo para pequenos sinais,
constitui um sistema de segunda ordem. Para o projeto em questão os pólos da malha foram
sintonizados em 0,1 e 125 rad/s, considerando um barramento com capacitância de 2000µF.
Uma questão importante a ser observada é a máxima tensão que poderá ser injetada na
frequência fundamental. Uma vez que a densidade de fluxo máxima no núcleo depende da
interação entre a(s) componente(s) harmônica(s) e a componente fundamental é importante
limitar a tensão máxima nesta componente a um valor que não limite a injeção de tensão
harmônica considerando operação do transformador abaixo do nível de saturação magnética.
Para altos valores de corrente fundamental, uma vez que as perdas no conversor aumentam
aproximadamente na proporção com o quadrado da corrente eficaz que por ele circula, pode
haver dificuldade em satisfazer o balanço de energia para manter a tensão no barramento CC
no valor desejado. Nesse caso pode ser necessária a utilização de alimentação externa do
barramento CC do inversor para manter de forma a manter a tensão no valor de referência.
3.6. Considerações Básicas sobre o Conversor Estático
Nesta seção serão discutidos dois aspectos básicos do dimensionamento do conversor estático
PWM necessário para a implementação da impedância ativa: o dimensionamento do
barramento CC do conversor e dos semicondutores. Uma proposta de proteção do conversor
contra curto-circuito será apresentada na seção 3.8.
3.4.3. Capacitância do Barramento CC
Uma vez que o conversor irá emular uma reatância indutiva, a capacitância utilizada no
barramento CC do conversor PWM é determinada a partir da circulação da potência reativa na
79
frequência harmônica de interesse. Essa potência reativa pode ser expressa [58] da seguinte
forma:
pQ (t ) = Ph cos(hωt + φ n )
(3.26)
A variação da energia armazenada no barramento CC é dada por:
∆E (t ) =
1
1
C (Vcc + ∆vcc (t )) 2 − CVcc2 = CVcc ∆vcc (t )
2
2
(3.27)
Igualando-se 3.27 à integral da equação 3.26, obtemos a capacitância mínima do barramento
CC para um dado valor de ripple de tensão ∆vcc _ max :
C min =
Ph
∆vcc _ maxVcc hω
(3.28)
Onde:
'
'
Ph = I hrms
V hrms
(3.29)
A escolha da capacitância do barramento CC deve considerar o efeito de todos os harmônicos
de interesse e ainda a resistência série equivalente do(s) capacitor(es) a ser(em) utilizado(s),
de forma que o ripple de tensão no barramento esteja de acordo com a especificação e não
interfira significativamente na geração da tensão relativa à impedância harmônica ativa de
interesse.
3.4.4. Dimensionamento dos Dispositivos Semicondutores do Conversor
A corrente que circula no primário do transformador axial é a corrente do secundário dividida
pelo número de espiras do primário. Essa corrente é composta pela componente fundamental,
a componente harmônica de interesse e pelas demais componentes harmônicas presentes na
corrente do circuito de potência. A avaliação das perdas nos dispositivos semicondutores deve
levar em consideração todas as componentes harmônicas e para isso, serão realizadas em
etapa posterior simulações para a determinação das correntes envolvidas e respectiva seleção
e dimensionamento térmico dos dispositivos a serem utilizados no projeto.
80
3.7. Transformador Coaxial
O projeto do transformador coaxial deve levar em consideração a tensão máxima a ser
injetada na frequência de interesse e ainda garantir a utilização do núcleo magnético em um
nível de densidade de fluxo inferior ao nível de saturação magnética do material utilizado em
sua construção. Outro fator de importância é número de espiras do primário, o qual deve ser
definido levando em consideração a tensão e corrente de trabalho dos semicondutores com
melhor custo benefício encontrados no mercado. A seguir é apresentado o equacionamento e
as especificações do transformador. A seção 3.7.2 apresenta a respectiva modelagem e ensaios
de um protótipo do transformador.
3.7.1. Projeto Básico – Abordagem Analítica
Figura 3.11: Referências para análise do núcleo do transformador coaxial.
Aplicando-se a lei de Ampère (equação 3.30) à configuração mostrada na figura 3.11, obtemse a expressão 3.31 que relaciona a densidade de fluxo magnético no núcleo com a corrente
no condutor principal Is (secundário do transformador) em função do raio r, considerando que
o material do núcleo possui permeabilidade magnética µ.
∫ H ⋅ dl = I
B(r ) =
(3.30)
s
Is
µ
2πr
O fluxo magnético total Φ, no núcleo magnético de dimensões ro,ri e b é dado por:
(3.31)
81
φ = ∫ B⋅dA = ∫
b
0
S
φ=
∫
r0
ri
Isµ
drdz
2πr
r
Isµ
b ln o
2π
ri
(3.32)
(3.33)
A amplitude média da densidade de fluxo magnético no material é dada por:
φ (I s )
B =
(3.34)
Ae
Assim, para uma dada corrente máxima no secundário do transformador, deve-se escolher um
núcleo nos quais as características dimensionais e a permeabilidade magnética do material
resulte numa amplitude da densidade de fluxo inferior ao nível de saturação do material,
conforme a equação 3.35.
B(t ) = B f (t ) + ∑ Bh (t ) < Bsat max
(3.35)
h
A tensão harmônica eficaz induzida no secundário do transformador é dada pela equação 3.36
e a seção mínima do núcleo magnético, para que seja possível induzir a tensão harmônica
eficaz desejada, é dada pela expressão 3.37. A expressão 3.38 define a relação entre a
componente de tensão na freqüência fundamental e a respectiva densidade de fluxo máxima,
considerando a seção mínima calculada em 3.36. O núcleo magnético deve ser escolhido de
forma a atender simultaneamente às equações 3.35, 3.37 e 3.38. Adicionalmente, dividindo-se
o fluxo magnético obtido na equação 3.33 pela corrente Is, obtemos a equação 3.39 que
representa a indutância de magnetização vista no secundário do transformador.
BhωhAc
Vh 2 _ rms =
Ac =
(3.36)
2
2Vh 2 _ rms
(3.37)
Bhωh
V f 2 _ rms =
B f ωAc
2
(3.38)
82
Lms =
r
µ
b ln o
2π
ri
(3.39)
Inicialmente o sistema será projetado para a injeção de uma tensão máxima de 6Vrms de
quinto harmônico. Assumindo uma densidade de fluxo de quinto harmônico máxima de 1T, a
equação 3.37 estabelece uma seção mínima de 0,0045m2. Inicialmente portanto, consideramos
a utilização de núcleos magnéticos toroidais com as seguintes dimensões: ro = 5 cm, ri = 3 cm
e comprimento b = 4 cm. Cada núcleo toroidal possui uma área de seção Ac igual a 8x10-4m2,
o que implica na utilização de 6 (seis) núcleos para que seja possível a indução da tensão
harmônica desejada. Neste ponto, vamos definir uma densidade de fluxo máxima para a
freqüência fundamental Bf = 0,5T. Utilizando 3.36, obtemos uma tensão eficaz máxima na
freqüência fundamental, Vfs_rms igual a 0,64Vrms. Essa tensão na freqüência fundamental será
utilizada para realizar o balanço de energia para compensar as perdas no conversor e
efetivação de amortecimento ativo que será discutido em seções posteriores.
Uma vez realizada a escolha inicial do núcleo magnético do transformador axial, é necessária
a verificação da equação 3.35 para garantir a possibilidade de utilização da configuração
escolhida. Para o projeto em questão, considerando o efeito combinado da injeção de tensão
harmônica e tensão fundamental, o nível máximo de densidade de fluxo será igual a 1,5T
(Bf+Bh). A escolha do material a ser utilizado no núcleo deve levar em conta o nível máximo
calculado, resultando em operação fora do ponto de saturação magnética.
Figura 3.12: Seção do transformador axial com a introdução de entreferro.
Para obter máxima flexibilidade para a instalação em campo do sistema proposto, o projeto do
transformador deverá envolver a utilização de entreferro para permitir o acoplamento do
sistema sem a necessidade de desfazer conexões de potência existentes, conforme indicado na
83
figura 3.12. Nesta condição, reescrevendo a equação 3.32 para considerar o efeito do
entreferro obtemos a equação 3.39 que, junto com a equação 3.40, obtemos 3.41, define a
amplitude da corrente de magnetização, vista no primário do transformador, necessária para a
indução da tensão harmônica desejada, considerando a densidade de fluxo harmônico máxima
no núcleo. De forma similar, a equação 3.42 apresenta a corrente de magnetização relativa a
indução da tensão na freqüência fundamental. A corrente de magnetização eficaz total é dada
pela expressão 3.43. A figura 3.13 apresenta o resultado da avaliação da equação 3.41, tendo
como base o projeto básico descrito.
φ=
2 g + 2πro / µ r
I s µr µ0
b ln
2π
2 g + 2πri / µ r
Bh =
2g +
(3.39)
(3.40)
I s µ0
2πri − 2 g
µr
I mag _ h _ p =
Bh 2 g 2πri − 2 g
+
N1 µ 0
µ r µ 0
(3.41)
I mag _ f _ p =
B f 2 g 2πri − 2 g
+
N1 µ 0
µ r µ 0
(3.42)
I mag _ rms _ p
I mag _ f _ p
=
2
2
I mag _ h _ p
+
2
2
(3.43)
84
Figura 3.13: Efeito da introdução de entreferro na corrente de magnetização do transformador
coaxial.
A análise apresentada aqui é simplificada, nas seções seguintes é realizada uma análise
experimental de um protótipo construído para testes preliminares. Os parâmetros de circuito
equivalente serão levantados e deverão ser úteis para estabelecer critérios para
dimensionamento do transformador em projetos futuros.
3.7.2. Ensaios e Levantamento de Parâmetros de um Protótipo de Transformador
Coaxial
Para se realizar uma avaliação mais detalhada do transformador foi utilizada uma abordagem
experimental a partir da realização dos ensaios a vazio e em curto-circuito. O objetivo foi
obter valores para os parâmetros de circuito equivalente e estabelecer uma base de referência
para análise de projetos futuros. Como o transformador projetado na seção 3.7.1 ainda não
estava disponível para testes, optou-se por realizar um ensaio com o transformador mostrado
na figura 3.14. O transformador protótipo é construído utilizando-se 4 núcleos toroidais
extraídos de transformadores toroidais, constituído de lâminas (fitas) de aço, que estavam
85
disponíveis no LAI. As dimensões de cada núcleo eram: ro = 5 cm, ri = 3 cm e comprimento b
= 4 cm. Embora o transformador deva trabalhar principalmente com a(s) freqüência(s)
harmônica(s) de interesse os ensaios foram realizados utilizando-se freqüência da rede –
60Hz. Essa condição foi estabelecida devido à dificuldade de se disponibilizar uma fonte com
tensão e freqüência controladas para realizar os ensaios em freqüências superiores à da rede
de alimentação.
Figura 3.14: Protótipo de transformador coaxial utilizado para avaliação experimental.
Figura 3.15: Circuito equivalente para o transformador coaxial no ensaio a vazio.
A figura 3.15 apresenta o circuito equivalente do transformador para o ensaio a vazio. Neste
ensaio o transformador foi alimentado pelo secundário (lado do conversor) e a tensão no
secundário foi medida. A tensão após a resistência do primário é dada por:
86
v aux = v p − rp i p = v L + v s '
(3.44)
Considerando-se que a resistência do primário foi medida diretamente e que o número de
espiras no primário é conhecida (Np = 20) podemos escrever:
v L = vaux − vs ' = L p
(3.45)
di p
dt
Assumindo uma condição de regime permanente e utilizando valores eficazes obtemos:
(3.46)
VL = L p ω I P
Lp =
(3.47)
VL
ωI p
A resistência rm pode ser obtida a partir da diferença entre a potência de entrada no ensaio e a
potência dissipada em rp:
Prm =
T
T
1
2
v
(
t
)
i
(
t
)
dt
−
r1i p (t )dt
∫ s p
∫
T 0
0
rm =
(3.48)
(3.49)
(Vs ' ) 2
Prm
Utilizando-se o valor de rm e a tensão no secundário referida ao primário podemos obter a
corrente de magnetização:
im = i p (t ) − irm (t ) = i p (t ) −
v's
rm
(3.50)
Usando valores eficazes podemos obter a indutância de magnetização:
V ' s = LmωI m
Lm =
V 's
ωI m
(3.51)
(3.52)
87
Figura 3.16: Circuito equivalente para o transformador coaxial no ensaio em curto-circuito.
Os parâmetros restantes são obtidos a partir do ensaio com secundário em curto-circuito, cujo
circuito equivalente é apresentado na figura 3.16. Neste caso a tensão no ramo de
magnetização pode ser escrita como:
v' s = vs − r1i p − L p
di p
(3.53)
dt
Considerando condição de regime permanente senoidal e utilizando-se o Matlab para o
processamento e obtenção dos fasores das formas de onda obtidas por medição, podemos
reescrever equação 3.53 na forma fasorial:
V ' s = V s − r p I p − L p ωI p
(3.54)
A corrente no secundário referida ao primário é dada por:
Is '= I p −
V 's
jωLm + rm
(3.55)
Desenvolvendo a equação da corrente no secundário obtem-se:
V 's
= (ωL' s ) 2 + rs2
I 's
L's =
1
V 's
2
ω
I 's
2
(3.56)
(3.57)
2
s
−r
88
Utilizando-se o desenvolvimento acima em conjunto com os resultados de medições
apresentados nas figuras 3.17 e 3.18, obtemos os resultados apresentados na tabela 3.1 para os
parâmetros do transformador utilizado. As resistências do primário e secundário foram
medidas a partir da realização de ensaio com corrente contínua.
Tabela 3.1 : Parâmetros de circuito equivalente do transformador coaxial.
rp
Lp
Lm
rm
Ls
rs
0,275 Ω
1,33 mH
513 mH
101 Ω
37µH
0,05Ω
Figura 3.17: Resultados do ensaio do transformador coaxial com secundário aberto.
89
Figura 3.18: Resultados do ensaio do transformador coaxial com secundário em curtocircuito.
Com o objetivo de ser ter uma melhor idéia do funcionamento do transformador utilizado
neste trabalho será realizada uma análise simplificada do processo de indução de tensão. A
análise é baseada na figura 3.19, onde pode ser visualizado que a indução de tensão no
condutor de potência (enrolamento de uma espira) é resultante na variação do fluxo que
atravessa a superfície definida por um caminho fechado, o qual é composto pelo condutor e os
demais elementos no qual o condutor é conectado. Embora em relação ao condutor do sistema
de potência a ser compensado a estrutura seja coaxial, é possível observar da figura 3.19 que o
funcionamento do transformador é semelhante aos transformadores toroidais utilizados como
medição de corrente, ou ainda em soluções de transformadores de potencial com o objetivo de
se obter baixos níveis de dispersão.
Com base na figura 3.19, o fluxo resultante no núcleo do transformador é dado por:
φ=
N1i1 − N 2 i2
ℜc
(3.58)
Onde ℜc é a relutância equivalente do núcleo magnético toroidal percorrido pelo fluxo φ.
Desprezando-se, para fins de simplificação da análise, o efeito de dispersão de fluxo, as
tensões induzidas nos enrolamentos primários e secundários do transformador são dadas por:
90
v1 = N1
dφ
dt
(3.59)
Figura 3.19: Funcionamento do transformador coaxial.
v2 = N 2
dφ
dt
(3.60)
Considerando-se que as correntes no primário e secundário do transformador são compostas
por uma componente na frequência fundamental if e uma componente harmônica ih tem-se
que:
i1 = i f 1 + ih1
(3.61)
i1 = i f 2 + ih 2
(3.62)
Onde os sub-índices 1 e 2 indicam primário e secundário, respectivamente. Dessa forma, a
equação 3.58 pode ser reescrita da seguinte forma:
φ=
N1i f 1 − N 2 if 2
ℜc
+
N1ih1 − N 2 ih 2
= φ f + φh
ℜc
(3.63)
A qual evidencia que no núcleo magnético existe uma parcela de fluxo de frequência
fundamental somado à uma parcela de fluxo de frequência harmônica. Por conseqüência, as
91
tensões induzidas nos enrolamentos primário e secundário podem ser escritas da seguinte
forma:
v f 1 + vh1 = N1
dφ f
dt
dφ f
v f 2 + vh 2 = N 2
dt
+ N1
dφ h
dt
(3.64)
+ N2
dφ h
dt
(3.65)
Lembrando que φ = BAc, onde B é a densidade de fluxo no núcleo magnético, tem-se:
v f 1 + vh1 = N1 Ac
dB f
v f 2 + vh 2 = N 2 Ac
dt
dB f
dt
+ N1 Ac
dBh
dt
+ N 2 Ac
dBh
dt
(3.66)
(3.67)
As equações 3.66 e 3.67 evidenciam o fato de que, para que o sistema seja capaz de induzir
tensões significativas na frequência harmônica, é interessante que a tensão sintetizada pelo
conversor na frequência fundamental – vf1, tenha valor reduzido. A tensão fundamental irá
definir o nível de fluxo fundamental no núcleo. A soma dos fluxos em ambas as componentes
(fundamental e harmônica) deve ser sempre inferior ao nível de saturação magnética no
material, conforme estabelecido na equação 3.35.
Como exemplo, considerando que a tensão sintetizada pelo conversor é nula vf1= 0, tem-se:
vh1 = N1 Ac
dB f
dt
+ N1 Ac
dBh
dt
(3.68)
Para o caso de síntese de tensão fundamental nula é necessário que, na equação 3.68,
dB f
seja
dt
igual a zero, condição está que só ocorre se Bf = 0 ou Bf = constante. A condição de fluxo
constante só ocorrerá caso o conversor sintetize um valor médio de tensão diferente de zero e
é uma condição que deve ser evitada pelo controle do conversor. Portanto, nesse caso, embora
a corrente na frequência fundametal seja diferente de zero, o fluxo resultante desta
componente no núcleo do transformador é nulo.
92
3.8. Proteção Contra Curto-Circuito
Uma vez que o sistema proposto consiste num conversor série, é de suma importância,
considerando um sistema para aplicação prática, considerar seu comportamento e proteção na
ocorrência de eventos de curto-circuito. Eventos de curto-circuito são comuns em sistemas
elétricos e ocorrem por diversos motivos desde falhas em componentes como falhas
operacionais resultantes de erros humanos.
Embora seja identificada na literatura técnica disponível ampla discussão sobre o desempenho
de diversos tipos de filtros ativos série no quesito de compensação de harmônicos, poucas
referências tratam do comportamento do compensador em condições de operação adversas,
tais como sobretensões e sobrecorrentes no sistema elétrico [47], as quais podem danificar os
diversos componentes do sistema. Um evento de curto-circuito secundário será refletida no
primário do transformador de acoplamento, causando fluxo excessivo de corrente e
sobretensões potencialmente perigosas ao conversor estático utilizado para síntese de tensão
harmônica. Uma vez que o transformador coaxial funciona basicamente como um
transformador de corrente, não é possível simplesmente abrir o circuito do secundário do
transformador. Esta operação implicaria que a indutância de magnetização ficaria em série
com o sistema elétrico e assumiria durante o período do distúrbio a maior parte da tensão de
rede, o que resulta em operação em altíssimo nível de saturação e conseqüente elevação de
temperatura devido ao correspondente aumento nas perdas por histerese [47].
Outro ponto a considerar é que apenas desabilitar/desligar o conversor estático resulta em que
o fluxo de energia se daria através dos diodos de roda-livre conectados em paralelo com os
transistores de potência (IGBTs), o que poderá levar à elevação da tensão no barramento a
níveis inaceitáveis. Mesmo que a tensão no barramento CC do conversor não atinja níveis
danosos, ao fim da elevação de tensão, devido ao efeito de saturação, o efeito de introduzir a
indutância de magnetização em série com o circuito de potência manteria elevada solicitação
térmica do transformador. A utilização de disjuntores ou fusíveis em série com o conversor
estático também não é eficiente devido aos altos tempos de resposta dos mesmos, da ordem de
dezenas de milésimos de segundo, o que poderá ser suficiente para danificar os componentes
sensíveis antes mesmo da atuação da proteção. O sistema de proteção deverá garantir atuação
suficientemente rápida, limitando os níveis de tensão e correntes durante o distúrbio a níveis
adequados aos componentes do conversor.
93
As referências [84] e [85] abordam uma alternativa baseada no uso de tiristores de potência e
varistor, sendo que a atuação é baseada na medição da corrente no varistor a qual aumenta
durante o distúrbio como resultado da elevação da tensão. Alguns artigos voltados para
restauradores dinâmicos de tensão e UPQC (Unified Power Quality Conditioner) , também
propõe estratégia semelhante para a proteção de sistema de injeção série. Uma vez que essas
propostas são voltadas para diferentes especificações relacionadas aos níveis de tensão,
frequência e metodologia de projeto dos transformadores de acoplamento, é necessário
analisar a implementação de um sistema de proteção que leve em consideração as
características específicas do projeto em questão.
A proposta básica para o sistema de proteção, apresentada de forma de diagrama em blocos na
figura 3.20, é baseado no uso de tiristores (SCR’s) conectados em paralelo com o secundário
dos transformadores de acoplamento, de modo a tornar possível o desvio da corrente de curtocircuito de forma que ela não circule pelo conversor estático de potência, evitando ainda a
elevação da tensão no primário a níveis potencialmente perigosos para o conversor. A
proposta de proteção trabalha em conjunto com a proteção de curto-circuito no sistema de
potência, normalmente efetuada por disjuntores ou relés de proteção. Os tiristores deverão ser
dimensionados para conduzir a corrente de curto refletida ao primário durante o tempo
necessário para que a proteção do circuito principal atue. Os tempos de atuação típicos dos
sistemas de proteção contra curto-circuito [47], [84] são da ordem dezenas de milissegundos e
estão relacionados aos tempos típicos de abertura de disjuntores e fusíveis de proteção.
Figura 3.20: Diagrama em blocos do circuito de proteção contra curto-circuito.
94
Uma diferença importante é que no projeto proposto a tensão de projeto na frequência
fundamental do transformador é da ordem de 1,0V no secundário. Assim, no evento de curtocircuito espera-se que o transformador de acoplamento entre rapidamente em saturação,
resultando em uma solicitação de tensão comparativamente mais baixa em relação às outras
propostas na literatura, eliminando portanto a necessidade de utilização de varistor e a
respectiva medição de corrente. Para se ter uma referência prática da característica de
saturação a curva de tensão x corrente no primário do transformador coaxial foi levantada e
apresentada na figura 3.21. O objetivo final é a utilização da própria medição de corrente do
conversor ao invés da corrente no secundário para a identificação da condição de curtocircuito e a realização do comando dos tiristores de potência.
Figura 3.21: Obtenção da curva de magnetização do transformador coaxial .
Afim de se realizar uma análise experimental do sistema de proteção foi montado um circuito
eletrônico para implementar as funções apresentadas na figura 3.20. Adicionalmente foi
implementado um circuito básico para teste, apresentado na figura 3.22. Neste experimento no
lado do secundário foram utilizadas 10 espiras para simular uma condição de maior corrente
no primário, uma vez que a carga no circuito principal foram lâmpadas incandescentes. Neste
este inicial, o conversor estático foi representado por um retificador, simulando um
desligamento dos IGBTs de potência durante o curto.
95
Figura 3.22: Circuito para teste preliminar da proteção.
Figura 3.23: Teste preliminar do circuito de proteção de curto circuito.
CH1 – Tensão primário do transformador (lado do conversor); CH 2 – Corrente no circuito
secundário (fonte); CH 3 – Corrente no conversor; CH 4 – Corrente nos tiristores;
O resultado do teste preliminar do circuito de proteção é apresentado na figura 3.23. Nesta
figura é possível observar que no evento de curto-circuito a corrente no secundário faz saturar
a ponta de medição de corrente (canal 2), logo em seguida os tiristores entram em condução,
como pode ser visto na respectiva medição de corrente no canal 4. A tensão no conversor,
registrada no canal 1, atinge 300V de pico. O tempo necessário para a abertura do circuito
96
pela proteção do sistema (disjuntor termomagnético de 2 A) foi de cerca de 8 ms. Devido a
dificuldades técnicas ainda não foi realizado o teste com o conversor em funcionamento. O
teste com o uso do conversor deverá ser realizado em trabalhos futuros.
É importante frisar que foi escolhida uma estratégia baseada em hardware para identificação
do curto-circuito e respectivo disparo dos tiristores. Uma vez que não depende do processo de
aquisição e processamento pelo firmware do sistema de controle, essa abordagem permite
minimizar o tempo de atuação da proteção minimizando, por conseqüência, as solicitações de
tensão e corrente no conversor e transformador de acoplamento.
3.9. Extensão para Utilização de Compensador trifásico
A implementação do sistema proposto em forma trifásica é apresentada na figura 3.24. Para
sistemas trifásicos, a implementação trifásica tem a vantagem de ter menor custo em relação à
abordagem monofásica uma vez que utiliza um número menor de dispositivos semicondutores
para sua implementação. A fonte auxiliar pode ser implementada a partir da utilização de um
transformador de baixa potência.
Figura 3.24: Circuito equivalente para o transformador coaxial no ensaio em curto-circuito.
97
Uma diferença importante em relação à implementação monofásica é a implementação dos
algoritmos PLL, cuja estrutura trifásica é apresentada na figura 3.25. Como na estrutura
trifásica não existe o filtro passa baixas associado à geração da componente de quadratura –
Iβ, a interação entre a dinâmica de compensação, PLLs e filtros passa-baixas nas variáveis de
no referencial síncrono é mais estável do que na implementação monofásica.
Figura 3.25: PLL utilizado para .a implementação trifásica do compensador harmônico série.
No referencial síncrono, as equações a serem utilizadas para compensação, já considerando a
utilização de amortecimento ativo são:
Vqh = Ra I qh − ω h L* I dh
(3.68)
Vdh = Ra I d + ω h L* I qh
(3.69)
As tensões de referência referenciadas ao sistema estacionário abc são:
v ah (t ) = Ra I qh cos θ h − ωL* I qh senθ h
(3.70)
vbh (t ) = Ra I qh cos(θ h m 120 o ) − ωL* I qh sen(θ h m 120 o )
(3.71)
vch (t ) = Ra I qh cos(θ h ± 120 o ) − ωL* I qh sen(θ h ± 120 o )
(3.72)
98
Nas equações 3.71 e 3.72, os sinais referentes ao ângulo a ser adicionado a θh dependem da
sequência do harmônico (se positiva ou negativa). A implementação trifásica do compensador
proposto permite uma flexibilidade maior para a implementação do amortecimento ativo.
Uma vez que o barramento CC é compartilhado pelas três fases é possível implementar uma
solução em que a demanda de energia na freqüência fundamental seja distribuída de forma a
minimizar a introdução de desequilíbrio de tensão resultante no sistema.
3.10. Conclusão
Neste capítulo foram apresentadas as estruturas de controle e hardware para a implementação
do sistema de inserção de impedância harmônica ativa, tanto para a compensação de um único
harmônico quanto uma estratégia para a compensação simultânea de dois ou mais
harmônicos. A amplitude, freqüência e fase das componentes fundamental e harmônica foram
obtidas a partir da utilização de algoritmos PLL (phase locked loop). Foi apresentado o
equacionamento para o cálculo da tensão harmônica associada à impedância ativa, o qual é
baseado na transformação de coordenadas para o referencial síncrono. Também foi
apresentado o equacionamento para a determinação da capacitância mínima do barramento
CC a partir da determinação de um ripple máximo de tensão e ainda a obtenção do modelo de
pequenos sinais utilizado como referência para o projeto da malha de controle de tensão.
O projeto básico do transformador coaxial, o qual utiliza o próprio cabo do sistema de
potência a ser compensado como secundário, foi apresentado sendo avaliados os efeitos da
introdução de entreferro na densidade de fluxo magnético do núcleo utilizado e na corrente de
magnetização do transformador. Os parâmetros de circuito equivalente de um protótipo de
transformador coaxial foram obtidos e indicam a necessidade de se otimizar as dimensões do
núcleo de forma a reduzir o efeito de dispersão de fluxo magnético.
Também foi apresentada uma proposta de proteção contra curto-circuito no sistema de
potência a qual é baseada na utilização de tiristores de potência no primário do transformador
(lado do conversor) para desviar a corrente de curto do conversor e evitar níveis de tensão e
corrente capazes de danificar o conversor de freqüência. Resultados de ensaios preliminares
do circuito de proteção foram apresentados. A característica de projeto do transformador
99
implica em operação com alto nível de saturação do transformador durante o curto-circuito o
que contribui para minimizar a tensão no lado do conversor.
Finalmente, foi apresentada uma proposta para a implementação trifásica do sistema de
compensação. A implementação trifásica tem a vantagem de diminuir a interação entre as
estruturas do sistema de compensação uma vez que o algoritmo PLL não necessita de malha
adicional para geração da componente de quadratura (emulação de sistema trifásico).
Resultados de simulações computacionais relacionadas à aplicação do sistema proposto serão
apresentados no capítulo 4.
Capítulo 4
Simulações Computacionais e Resultados Práticos
4.1. Introdução
Neste capítulo são apresentados os resultados de simulação da aplicação do sistema de
impedância harmônica ativa em uma situação de significativa importância no meio industrial:
a dessintonia de bancos automáticos de capacitores para correção de fator de potência.
Dessintonizar [23], [75] um banco de capacitores é projetar reatores série para cada estágio,
de forma que a freqüência de ressonância de cada estágio esteja sintonizada em um valor fora
(normalmente abaixo) da(s) freqüência(s) harmônica(s) significativas presentes no sistema. O
objetivo é garantir que as ressonâncias do sistema não sejam excitadas em qualquer das
configurações possíveis do banco, evitando a sintonia dos capacitores para a criação de filtros.
A introdução dos reatores aumenta em cerca de 30% o custo do banco para correção de fator
de potência. Qualquer alternativa que implique em desempenho, redução de volume e custo
nesse sistema possui grande possibilidade de aplicação, uma vez que a necessidade de
correção de fator de potência é contínua e ainda é regulamentada pela ANEEL, que aplica
pesadas multas [75] quando ocorre a operação de um consumidor com fator de potência
abaixo de 0,92.
Na seção 4.3 também são apresentados os resultados experimentais obtidos a partir
experimentos realizados no Laboratório de Aplicações Industrias da UFMG. O objetivo dos
experimentos era o de avaliar a viabilidade de induzir tensões harmônicas e ainda a utilização
dos algoritmos PLL para a obtenção em tempo real da amplitude e fase das componentes
fundamental e harmônica de interesse. Os experimentos foram realizados utilizando-se um
protótipo básico constituído por um transformador coaxial, um conversor PWM comercial e
placa de controle UPCC2812.
101
A ordem das seções deste capítulo procura dar uma idéia da evolução dos conceitos do
trabalho e guarda uma relação direta com os aspectos teóricos avaliados no capítulo 3. A
seção 4.2.5 apresenta o resultado de simulação considerando compensação simultânea de
harmônicos e considerando ainda um importante avanço: a utilização da corrente do
conversor como referência para a detecção das componentes harmônicas e respectiva síntese
da tensão de compensação.
4.2. Simulações do compensador monofásico
Todas as simulações apresentadas no trabalho foram implementadas a partir da construção de
modelos no Matlab/Simulink. A figura 4.1 apresenta o diagrama principal utilizado como
plataforma para as simulações com implementação monofásica do compensador. Os
subsistemas apresentados na figura 4.1 serão apresentados no anexo deste trabalho. Nas
subseções posteriores são indicados os valores dos parâmetros utilizados em cada simulação
realizada.
Figura 4.1: Sistema monofásico com banco automático de capacitores com dessintonia ativa.
4.2.1. Simulações preliminares – harmônico implementado como fonte de corrente ideal
Como passo inicial para a análise do compensador proposto foi realizado o estudo da
aplicação da impedância harmônica a partir da implementação do sistema monofásico
exemplo apresentado na figura 4.2. É importante mencionar que o sistema da figura 4.2 foi
102
simulado utilizando-se o sistema implementado no Simulink® apresentado na figura 4.1. O
sistema é constituído basicamente por uma fonte e sua impedância, uma carga com fator de
potência indutivo, um banco para correção de fator de potência com um estágio fixo e três
estágios comutados a tiristor e uma fonte harmônica injetando uma componente de 5°
harmônico. Os dados do sistema são: potência base = 150kVA, X = 7%, X/R = 15, carga:
80kW, FP = 0,8 indutivo, Ih = 0,15 p.u. de 5° harmônico (100 Apico). A capacitância de cada
estágio é de 925µF e na condição em que todos os estágios de capacitores estão acionados
uma ressonância paralela no 5° harmônico é verificada, conforme pode ser observado nas
figuras 4.3 e 4.4 que apresentam as correntes no banco de capacitores e na fonte de
alimentação respectivamente.
Figura 4.2: Sistema monofásico com banco automático de capacitores com dessintonia ativa.
Com a ativação do sistema de impedância ativa para a síntese de uma indutância de 0,25mH
no quinto harmônico obtem-se os resultados apresentados na figuras 4.5 e 4.6. A referência de
tensão para o modulador PWM e a tensão no barramento CC do conversor são apresentados
na figuras 4.7. Os resultados mostram a capacidade do sistema em realizar a dessintonia do
banco de capacitores. Embora os ganhos dos algoritmos PLL tenham sido calculados
considerando um valor referência de 1,0 p.u. de corrente, tanto para a componente
fundamental, quanto para a componente harmônica, a resposta dinâmica do sistema é
satisfatória uma vez que o valor de regime é atingido em aproximadamente 3 ciclos de rede.
103
Figura 4.3: Correntes no banco de capacitores sem injeção de tensão harmônica (1 p.u. =
434A).
Figura 4.4: Correntes na fonte e na carga sem injeção de impedância harmônica.
104
Figura 4.5: Correntes no banco de capacitores com injeção de tensão harmônica.
Figura 4.6: Correntes na fonte e na carga com injeção de tensão harmônica.
105
Figura 4.7: Tensão no barramento CC, referência de tensão para controledo barramentoCC e
referência de tensão harmônica para o modulador PWM.
Para fins de comparação a figura 4.9 apresenta os resultados de simulação da corrente no
banco de capacitores do sistema da figura 4.2 com todos os estágios acionados em t = 0. Neste
caso o cálculo da tensão harmônica é realizado de forma simplificada, conforme mostrado na
figura 4.8, no qual a corrente harmônica é obtida subtraindo-se a componente fundamental,
previamente calculada, da corrente no banco dos capacitores, sendo o resultado aplicado a um
bloco derivador para a síntese da tensão indutiva. A tensão harmônica é injetada no sistema
utilizando-se uma fonte ideal. Embora o resultado obtido seja melhor do ponto de vista de
dinâmica, por utilizar grandezas pré-calculadas e bloco derivador ideal, este resultado indica
um bom desempenho da estratégia de compensação proposta neste trabalho uma vez que o
valor da componente harmônica após a passagem do transitório de chaveamento de
capacitores é praticamente igual em ambos os casos.
106
Figura 4.8: Diagrama (Simulink®) simplificado para obtenção da tensão harmônica.
Figura 4.9: Correntes no banco de capacitores utilizando o algoritmo da figura 4.8.
A indutância harmônica a ser sintetizada deve ser definida de acordo com o objetivo de
controle, o qual pode ser um filtro sintonizado ou dessintonizado, por exemplo. Como a
tensão de compensação é obtida diretamente pela multiplicação de L* pela estimativa da
amplitude da componente harmônica Iqh, qualquer desvio em L* deverá ter um impacto direto
nos resultados da mesma forma que em filtros passivos. Essa condição é especialmente crítica
em filtros sintonizados, onde uma frequência de ressonância específica deve ser
implementada de forma a se obter o desempenho de filtragem esperado. Como L* é uma
variável controlada, efeturar seu ajuste em campo torna-se uma tarefa simples. Como exemplo
107
de avaliação de desvio em L*, a figura 4.10 apresenta uma simulação do sistema da figura 4.2
considerando uma variação de -20% em L*. O resultado apresentado ainda apresenta
compensação efetiva o que indica a indutância sintetiza ainda é capaz de realizar a dessintonia
do banco eliminando a ocorrência de ressonância.
Figura 4.10: Simulação considerando variação de -20% em L*.
4.2.2. Simulação com Introdução de Amortecimento Ativo
O sistema da figura 4.2 foi simulado introduzindo-se uma componente de tensão de
compensação harmônica em fase com a corrente harmônica estimada, conforme apresentado
na equação 3.15. A resistência ativa introduzida foi representada por uma tensão da 10% em
relação à queda de tensão referente à indutância ativa de referência. A introdução de uma
componente resistiva implica na necessidade de se contrabalancear o correspondente fluxo de
energia ativa no barramento CC. O balanço de energia é realizado através da malha de
controle de tensão, apresentada na seção 3.5 O resultado da introdução do amortecimento
ativo é apresentado na figura 4.11. A figura 4.12 apresenta a tensão no barramento CC, a
referência de tensão do controlador do barramento, a referência para síntese da tensão
harmônica e respectiva estimativa de corrente harmônica. Pode ser observada a redução do
ângulo de defasagem entre a tensão e a corrente harmônica, comparando-se ao resultado da
figura 4.7, e ainda o conseqüente aumento da referência de tensão na frequência fundamental.
108
Esta última ocorre devido à necessidade de compensar a variação de energia no barramento
CC associada ao fornecimento de potência ativa na frequência harmônica.
Figura 4.11: Correntes no banco de capacitores com a introdução de amortecimento ativo.
Figura 4.12: Tensão no barramento CC e referências de tensão de compensação com a
introdução de amortecimento ativo.
109
Comparando-se os resultados das figuras 4.11 e 4.5 (sem amortecimento ativo) pode-se
verificar que introdução do amortecimento ativo apresentou apenas uma pequeno impacto nas
oscilações da estimativa da componente harmônica que ocorrem após o transitório de
comutação dos capacitores. Por outro lado, principalmente após a entrada do último estágio
capacitivo ocorreu o aumento do valor de pico no transitório de comutação.
No caso apresentado foi necessária apenas uma tensão da ordem de 1% para manter o
barramento CC do conversor no valor de referência. Num sistema trifásico considerando-se a
presença de harmônicos desequilibrados entre as fases, o amortecimento ativo pode contribuir
com o aumento da componente de sequência negativa de tensão no sistema. Adicionalmente,
tem-se que a introdução de tensão fundamental necessária para balancear o fluxo de energia
relacionado ao amortecimento ativo contribui para aumentar o nível de fluxo magnético no
transformador de acoplamento, o que pode implicar na necessidade de sobredimensionamento deste componente.
4.2.3. Simulação de Compensação de Distorção de Tensão na Rede de Alimentação
O sistema mostrado na figura 4.2 foi simulado alterando a fonte de harmônicos para
considerar uma fonte de tensão harmônica em série com a rede, conforme mostrado na figura
4.13, para simular distorção prévia de tensão na rede de alimentação. Foi introduzida uma
distorção de tensão de 10% e simulação foi executada considerando todos os estágios
capacitivos ativados. O resultado dessa simulação é apresentado na figura 4.14, onde são
apresentadas a corrente no capacitor e seu respectivo espectro harmônico antes e após a
compensação harmônica ser ativada. O desempenho mostrado na figura 4.14 demonstra a
capacidade do sistema, cuja compensação é baseada na leitura de corrente harmônica, para
mitigação de distorção de tensão.
É importante ressaltar que uma importante diferença neste trabalho em relação à diversos
outros relacionados à compensação harmônica ativa é que normalmente, a geração dos sinais
de compensação harmônica é obtida a partir do processamento de leituras junto a carga
geradora de harmônicos. Numa condição de regime, por exemplo, a amplitude harmônica no
lado da carga é constante independentemente da ativação ou não do filtro ativo. Isso evidencia
110
uma limitação das propostas citadas nas referências deste trabalho: o compensador precisa
sempre de uma medição adicional para a realização da compensação. O trabalho proposto
necessita apenas uma medição de corrente para sua implementação.
Figura 4.13: Sistema utilizado para simulação de compensação de distorção de tensão.
Figura 4.14: Resultado de simulação considerando compensação de distorção de tensão.
111
4.2.4. Simulações utilizando retificador como carga não-linear
Afim de avaliar a aplicação do compensador proposto em uma situação mais próxima de uma
aplicação real, a fonte ideal foi substituída por um retificador com carga resistiva de 5 ohms e
um capacitor de filtro, como apresentado na figura 4.15. Na entrada do retificador foi
introduzida uma indutância de 10µH. Os demais parâmetros foram idênticos aos utilizados
nas simulações anteriores.
Figura 4.15: Sistema utilizado para simulação de compensação com carga retificadora.
Na figura 4.16 é apresentada a corrente no banco de capacitores e as respectivas estimativas
da componente fundamental e de quinto harmônico obtidos sem a operação do compensador.
Com a entrada do quinto estágio uma forte ressonância no quinto harmônico é identificada
conforme esperado. Mesmo na presença de diversas componentes harmônicas, conforme pode
ser visto no espectro harmônico mostrado na figura 4.17, os algoritmo PLLs foram capazes de
rastrear as componentes de interesse na corrente do banco de capacitores.
112
Figura 4.16: Resultado de simulação considerando compensação de distorção de tensão.
Figura 4.17: Espectro harmônico da corrente no banco de capacitores com retificador – sem
compensação harmônica.
113
As figuras 4.18 e 4.19 apresentam os resultados obtidos para a corrente no banco de
capacitores com a compensação ativada. O sistema reduziu a distorção de corrente, no caso de
todos os capacitores conectados, de cerca 0,39 pu para 0,13 pu, que corresponde à uma
redução de 66%. Essa redução foi obtida limitando-se a tensão de compensação harmônica
em 6V no lado dos capacitores. Os resultados apresentados na figura 4.18 indicam um
comportamento mais oscilatório o qual está relacionado a não completa atenuação das
componentes harmônicas próximas (terceiro e sétimos harmônicos) que são projetadas no
referencial síncrono.
Figura 4.18: Correntes no banco de capacitores com compensação ativada – carga retificador.
114
Figura 4.19: Espectro das correntes no banco de capacitores com compensação ativada –
carga retificador.
As oscilações verificadas também estão associadas a interações entre as malhas de controle
dos algoritmos PLL, filtros passa-baixa utilizados nas variáveis de saída dos PLLs,e ainda à
resposta do sistema de potência em relação à introdução da tensão harmônica. A principal
dificuldade em relação à redução das oscilações está nas proximidades das frequências de
corte dos filtros e faixas de passagem das malhas de controle. É esperado que para cada
sistema a resposta seja diferente e propõe-se, para trabalhos futuros, o desenvolvimento de
uma modelo detalhado para avaliação da aplicação em diferentes configurações.
4.2.5. Simulação com compensação Simultânea de 5° e 7° harmônicos
Nesta seção é apresentada a simulação considerando a compensação simultânea de duas
componentes harmônicas: quinto e sétimo. A carga considerada foi o retificador apresentado
na figura 4.20. Nesta simulação foi utilizado um controlador tipo proporcional-integral (PI)
para a geração da referência de indutância ativa, conforme apresentado na figura 4.18. A
referência para cada controlador PI (cada componente harmônica) é zero. Cabe lembrar que a
tensão máxima aplicada para cada componente foi limitada em 9V de pico.
115
Figura 4.20: Controladores PI utilizados para a geração da referência de indutância ativa.
A figura 4.21 apresenta a corrente no banco de capacitores e a estimativa da componente
fundamental. O respectivo espectro harmônico é apresentado na figura 4.22. Pode-se verificar
comparando-se o espectro da figura 4.23 com o da figura 4.17, que o sistema proposto realiza
a atenuação das duas componentes harmônicas. Foi percebido também um aumento não
previsto na componente de nono harmônico (540 Hz). Com o objetivo de avaliar a origem da
influência sobre a componente de nono harmônico foi calculado o espectro harmônico do
sinal de referência
para o modulador o qual é apresentado na figura 4.23. Como a
componente de nono harmônico da tensão de referência possui pequena amplitude sugere-se
que a origem principal do acréscimo na referida componente de corrente esteja no processo de
geração da onda PWM pelo inversor, o que deverá ser investigado em trabalhos futuros.
116
Figura 4.21: Corrente no banco de capacitores e respectiva estimativa da componente
fundamental.
Figura 4.22: Espectro harmônico da corrente no banco de capacitores.
117
\\
Figura 4.23: Espectro harmônico do sinal de referência para compensação harmônica.
Com o objetivo de simplificar o sistema proposto e ainda eliminar a medição de corrente
realizada no secundário do transformador foram realizadas simulações adicionais utilizandose a medição de corrente no lado do conversor de frequência. Essa modificação
aparentemente simples contribui significativamente para o conceito de flexibilidade do
conversor proposto e ainda reduz o custo relativo ao sistema de medição necessário para a
implementação. Os parâmetros do transformador utilizados para esta simulação constam na
tabela 3.1. Os resultados de simulação para este caso são apresentados nas figuras 4.24 a 4.26.
Os resultados de simulação mostram que os parâmetros do transformador influenciam no
desempenho do sistema uma vez que pode ser percebido na figura 4.24 um aumento do tempo
necessário para o sistema atingir o regime.
118
Figura 4.24: Corrente no banco de capacitores e respectiva estimativa da componente
fundamental.
Figura 4.25: Espectro corrente no banco de capacitores e respectiva estimativa da componente
fundamental.
119
Figura 4.26: Correntes na carga e no conversor – compensação com medição apenas da
corrente do conversor.
4.2.6. Consideração Sobre a Efetividade da Solução em Função dos Parâmetros do
Sistema
Considerando, por exemplo, o sistema apresentado na figura 4.2, o qual considera como
origem da distorção harmônica uma fonte de corrente ideal, é razoável considerar que a
efetividade da solução proposta neste trabalho seja influenciada pelos parâmetros da fonte, ou
seja, sua reatância equivalente Xs e sua relação com a resistência equivalente Rs. Para se
avaliar essa influência podemos utilizar a equação 4.1 onde é calculado o ganho G, o qual
corresponde à relação entre a amplitude da componente harmônica que flui no capacitor e a
amplitude da corrente fornecida pela fonte ideal.
G=
( jωh ) 2 Ls Ceq + jωhCeq Rs
2
*
jωh ) ( Ls + L )Ceq + jωhCeq Rs + 1
=
I Ch
Ih
(4.1)
Calculando-se 4.1 considerando ωh = 5º harmônico, L* = 0,25mH e ainda Ceq = 4*925uF
(quatro estágios acionados), Ls = 60uH e variando-se a relação X/R da fonte, obtém-se a
figura 4.27. É possível verificar que para valores muito baixos de Xs/Rs a amplitude da
componente harmônica no capacitor aumenta, o que pode resultar em amplitudes não
120
aceitáveis. Neste caso, a exemplo da conexão paralela de filtros tipo shunt para o aumento da
capacidade de filtragem, podem ser associados mais compensadores em série, conforme
apresentado na figura 4.28, tendo o objetivo de aumentar a indutância no harmônico de
interesse, melhorando, portanto, o desempenho da compensação harmônica.
Figura 4.27: Avaliação da influência da relação X/R na relação Ich/Ih.
Figura 4.28: Associação série de compensadores para o aumento da capacidade de
compensação harmônica.
121
4.2.7. Simulação de sistema de compensação trifásico
Nesta seção são apresentados os resultados de simulação resultantes da utilização da extensão
trifásica apresentada no capítulo 3. O modelo geral de simulação é apresentado na figura 4.29
e o modelo utilizado para representar o conversor PWM e o transformador coaxial é
apresentado na figura 4.30. Os parâmetros por fase utilizados na simulação foram os mesmo
utilizados nas simulações monofásicas. Neste caso foi simulada a situação considerando todos
os capacitores conectados. A figura 4.31 apresenta as correntes no banco de capacitores
simuladas sem compensação ativada. A figura 4.32 apresenta as estimativas da componente
fundamental e de quinta harmônica da corrente na fase A do banco de capacitores. O
respectivo espectro harmônico é apresentado na figura 4.33.
Figura 4.29: Modelo de simulação do compensador trifásico no Simulink.
Com a ativação da compensação são obtidos os resultados apresentados nas figuras 4.34 e
4.35. A implementação trifásica do compensador é capaz de reduzir a componente de quinto
harmônico de 140 Apico para aproximadamente 15 Apico. O espectro apresentado na figura 4.35
indica que além do efeito de atenuação na componente desejada o compensador exerceu
122
influência no nono harmônico. Essa interação abre uma perspectiva de estudos futuros para
sua mitigação.
Figura 4.30: Modelo de simulação do compensador trifásico no Simulink –conversor +
transformador coaxial.
Figura 4.31: Correntes nas fases do banco de capacitores – sem compensação ativa.
123
Figura 4.32: Corrente na fase A do banco de capacitores e estimativas das componentes
fundamental e de quinto harmônico – sem compensação.
Figura 4.33: Espectro harmônico da corrente na fase A do banco de capacitores.
124
Figura 4.34: Corrente na fase A do banco de capacitores e estimativas das componentes
fundamental e de quinto harmônico – com compensação.
Figura 4.35: Espectro harmônico da corrente na fase A do banco de capacitores - com
compensação.
125
4.3. Resultados Experimentais
O objetivo desta seção é apresentar os resultados práticos preliminares obtidos a partir de
experimentos realizados no Laboratório de Aplicações Industrias da UFMG. O objetivo dos
experimentos era o de avaliar a viabilidade de induzir tensões harmônicas e ainda a utilização
dos algoritmos PLL para a obtenção em tempo real da amplitude e fase das componentes
fundamental e harmônica de interesse. Os experimentos foram realizados utilizando-se um
protótipo básico constituído por um transformador coaxial, um conversor PWM comercial e
placa de controle UPCC2812.
4.3.7. Descrição do setup de teste
O sistema básico utilizado para os ensaios é apresentado na figura 4.36. Foi utilizado um
capacitor para correção de fator de potência com capacitância de 104µF, sendo alimentado a
partir de um auto-transformador. O experimento realizado pode ser considerado como uma
avaliação em escala reduzida da simulação referente à compensação de distorção de tensão,
apresentada na seção. 4.2.3. O hardware UPCC2812, baseado no processador TMS320F2812
foi utilizado para a geração de referência de tensão harmônica e síntese dos sinais PWM para
o controle dos IGBTs do inversor de freqüência utilizado no protótipo. O firmware
desenvolvido implementa algoritmo PLL para o rastreamento da amplitude e fase das
componentes fundamental e de 5° harmônico corrente no capacitor. Adicionalmente foi
implementada a leitura de um potenciômetro que foi utilizado para a geração da referência de
indutância ativa utilizada para síntese da tensão harmônica de referência para compensação. O
retificador de entrada do barramento CC do inversor CFW09 foi alimentado a partir de um
auto-transformador monofásico.
126
Figura 4.36: Diagrama da montagem realizada para obtenção dos resultados experimentais
preliminares.
O transformador coaxial foi construído utilizando-se quatro núcleos toroidais constituídos de
lâminas de aço-silício os quais foram extraídos de transformadores de alimentação (60 Hz)
disponíveis no LAI. As dimensões dos núcleos utilizados são as indicadas na seção 3.8 deste
trabalho e, como foram utilizados apenas dois núcleos, a tensão harmônica a ser injetada ficou
limitada a 5,0V eficaz. O primário do transformador foi constituído por 20 espiras de fio de
cobre de 1,0 mm2.
4.3.8. Resultados
Foram realizados dois ensaios: o primeiro sem injeção de tensão harmônica (referência nula
para o modulador PWM) e o segundo ensaio com compensação ativa no quinto harmônico.
Na figura 4.37 são apresentadas as correntes no capacitor e no conversor PWM obtidas no
primeiro ensaio. Na figura 4.38 é apresentado o espectro da corrente no capacitor sem
compensação harmônica. É possível verificar a forte presença de harmônicos na corrente do
capacitor, associada à distorção de tensão pré-existente no sistema de alimentação do LAI.
127
Nas figuras 4.39 e 4.40 são apresentados os resultados com a ativação da compensação. É
preciso salientar que, para eliminar os ruídos de chaveamento do inversor nas medições, foi
alterado o modo de aquisição do osciloscópio para apresentar na saída a média das últimas
quatro amostras uma vez que ainda não projetado um filtro de saída no inversor para reduzir o
ruído associado às comutações no conversor.
Figura 4.37: Resultados experimentais obtidos sem a injeção de tensão harmônica.
128
Figura 4.38: Espectro harmônico da corrente no capacitor sem a injeção de tensão harmônica.
Figura 4.39: Resultados obtidos com a injeção de tensão no quinto harmônico.
129
Figura 4.40: Espectro harmônico da corrente no capacitor com e sem a injeção de tensão
harmônica.
Os resultados obtidos mostram que apesar da reduzida tensão induzida no secundário do
transformador (5V rms), foi possível obter uma redução de 75% na componente de quinto
harmônico existente (de 20% para 5%). Resultados ainda mais efetivos devem ser
conseguidos com a construção do protótipo de transformador projetado no trabalho o qual
prevê a utilização de seis núcleos ferromagnéticos em paralelo.
No anexo deste trabalho é apresentado o firmware de controle desenvolvido para a
implementação do conversor proposto. Infelizmente não foi possível obter mais resultados
experimentais devido à ocorrência da queima do hardware de controle (UPCC e interface
JTAG) durante a realização de testes preliminares e ainda a impossibilidade de reposição
dentro do prazo proposto para a conclusão do trabalho. De qualquer forma, os resultados
obtidos e o conjunto de simulações demonstram a viabilidade do projeto.
130
4.4. Conclusão
Neste capítulo foram apresentados os resultados de simulação da aplicação da impedância
harmônica ativa para o controle do fluxo do quinto harmônico em um sistema de bancos de
capacitores sintonizados para a ocorrência de ressonância paralela. Foram apresentados os
resultados de simulação considerando fontes harmônicas ideais de corrente e tensão e ainda
simulações considerando um retificador como carga não-linear. Os resultados confirmaram a
capacidade do sistema em controlar o fluxo de harmônicos implementando com sucesso a
dessintonia ativa do banco
Resultados considerando a compensação simultânea de duas componentes harmônicas e ainda
a utilização de compensador trifásico ampliam a flexibilidade do sistema proposto. A
utilização de medição de corrente apenas no lado do conversor PWM representa grande
avanço na flexibilidade de aplicação e destaque relativo às propostas apresentadas na
literatura técnica pesquisada.
Também foram apresentados os resultados práticos preliminares da aplicação do conceito de
inserção seletiva de impedâncias harmônicas em sistemas elétricos utilizando transformador
coaxial para a indução da tensão, no qual o secundário é o próprio cabo de alimentação do
sistema onde a referida impedância é inserida. Os resultados mostram que mesmo uma
pequena tensão induzida é capaz de exercer significativa influência no fluxo harmônico, o que
indica de forma eficaz a viabilidade deste projeto de pesquisa.
Capítulo 5
Conclusões e Propostas de Continuidade
5.1. Conclusões
Neste trabalho foi esboçado o cenário de compensação de harmônicos em sistemas elétricos
industriais apresentando as principais recomendações e soluções normalmente utilizadas. A
argumentação apresentada mostra que a presença de harmônicos associados às cargas nãolineares representa um problema em que se necessita intervenção principalmente quando são
utilizados capacitores na instalação, notadamente, os capacitores para correção de fator de
potência. Uma discussão objetiva sobre a disponibilidade e custo de soluções para
compensação de fator de potência na presença de harmônicos destacou a necessidade de uma
solução com melhor flexibilidade e relação custo-benefício. Uma pesquisa de mercado
relacionada aos filtros ativos e híbridos mostra ainda que as topologias disponíveis para
aquisição no mercado são baseadas no uso de filtros ativos paralelos ou a combinação destes
com filtros passivos, no caso dos filtros híbridos. Essa constatação contrasta com a ampla
literatura técnica relativa à utilização de filtros híbridos que utilizam compensador ativo série.
Importantes aspectos relacionados à implementação do sistema, tais como o transformador
coaxial e a proteção contra curto-circuito foram apresentados incluindo avaliações
experimentais. A construção do transformador coaxial deve ter atenção especial relativo a
saturação magnética e ainda em relação à minimização dos efeitos de dispersão magnética. A
proteção de curto-circuito, baseada no uso de tiristores de potência, deve ser capaz de desviar
a corrente de curto refletida no primário em tempo suficiente para evitar sobretensão e sobre
corrente no conversor de freqüência. Deve ser capaz ainda de suportar a corrente de curto
durante o tempo necessário para abertura da proteção principal do sistema de potência. Foi
apresentada uma proposição para a implementação trifásica do compensador proposto. Esta
implementação tem a vantagem de reduzir ainda mais o custo total da solução considerando
um sistema industrial trifásico, uma vez que necessita de menos dispositivos semicondutores
de potência para sua implementação.
132
Os resultados de simulação apresentados no capítulo 4, foram obtidos a partir da avaliação da
aplicação do sistema proposto em uma aplicação industrial típica, a qual apresenta
significativa variação dinâmica. Esses resultados confirmam a viabilidade da utilização do
sistema. Os resultados experimentais apresentados no capítulo 5, corroboram que a inserção
de impedâncias harmônicas permite direcionar o fluxo de harmônicos específicos de forma a
bloquear seu fluxo natural para os capacitores, eliminando os efeitos de ressonâncias e
contribuindo para a redução das possibilidades de falhas nos capacitores associadas aos
efeitos dos harmônicos.
A inovadora utilização de transformadores coaxiais para a injeção de tensões harmônicas
garante uma grande flexibilidade para a instalação do sistema, uma vez que facilita a
realização de testes preliminares antes da definição da localização permanente da solução. Em
comparação com as propostas existentes na literatura, o compensador proposto neste trabalho
reduz a utilização de sensores e a dependência do conhecimento imediato da causa da
distorção de corrente (medição junto à carga não-linear). O sistema desenvolvido é capaz de
compensar distorções de tensão e corrente sem a necessidade de medição direta de corrente na
carga não-linear.
Como resultado adicional do trabalho tem-se a contribuição para a produção de pesquisa no
Centro Universitário - Católica de Santa Catarina através da realização de um projeto de
iniciação científica cujo tema era a proteção de curto-circuito do compensador proposto neste
trabalho. Outra contribuição relevante foi a publicação na Revista da SOBRAEP – Eletrônica
de Potência do artigo “Series-shunt Compensation for Harmonic Mitigation and Dynamic
Power Factor Correction”o qual apresenta o trabalho desenvolvido.
5.2. Propostas de continuidade
A perspectiva apresentada pela proposta de flexibilidade do compensador proposto abre
diversos pontos para pesquisa futura. A opção pela redução do número de sensores para
implementação da compensação harmônica traz diversos desafios os quais justificam a
dedicação de esforço de pesquisa. Os principais pontos identificados para pesquisa futura são:
133
•
Estudo da aplicação de impedâncias harmônicas ativas para o controle de fluxo de
harmônicos em um sistema radial;
•
Análise da aplicação do sistema proposto para a compensação série-shunt
distribuída conforme discutido no capítulo 2.
•
Estudo experimental incluindo todas as funcionalidades propostas no trabalho.
•
Estudo de alternativas para redução das interações entre os blocos de controle –
PLLs, filtros e ainda métodos adaptativos para melhorar a sintonia das estruturas
que compõe a estratégia de controle;
•
Análise de viabilidade e projeto de um sistema para aplicação em redes de
distribuição em média tensão – 13,8kV de forma a propor a utilização da estratégia
em sistemas de distribuição urbana das concessionárias.
•
Detalhamento do projeto e avaliação de desempenho de um filtro senoidal para a
saída do conversor PWM;
•
Modelagem do transformador coaxial fia elementos finitos;
•
Avaliação das perdas no transformador considerando diferentes materiais para a
confecção do núcleo (aço-silício de grão orientado, ligas amorfas, etc.).
Referências Biliográficas
[1] Cardoso, R. and H.A. Grundling. "Reference generation for harmonics cancellation,
displacement power factor correction and unbalance compensation under unknown
fundamental frequency", Industrial Electronics Society, 2005. IECON 2005. 31st Annual
Conference of IEEE.
[2] Drábek, P., V. Kůs, and J. Fořt, "Negative Influence of Controlled Rectifiers on Power
Distribution Network", Power Electronics Intelligent Motion/Power Quality, Stuttgart:
Mesago, 2007, vol. 2, p. s. 1-4.
[3] Kůs, V., P. Drábek, J. Fořt, "Harmonic and Interharmonic Currents Generated by
Softstarters", in Power Electronics Intelligent Motion Power Quality - PCIM. 2007:
Suttgart, Mesago, vol. 2, p. s.1-4.
[4] Mitchell, J.E. "Distortion factor: the `new' problem of power factor",
Telecommunications Energy Conference, 1992. INTELEC '92, 14th International.
[5] Zobaa, A.F. "Comparing power factor and displacement factor corrections based on IEEE
Std. 18-2002", Harmonics and Quality of Power, 11th International Conference on,
2004.
[6] "Manual para Correção de Fator de Potência", WEG, www.weg.net.
[7] Walter, T.J., K.L. Hulshorst, and E.J.E. R., "Harmonic Analysis and Mitigation in Large
Industrial Steel Plants", Electrical Power Quality and Utilization Magazine, vol. 11, p.
57-63, 2006.
[8] Souza, F., "Correção de Fator de Potência para Instalações de Baixa Potência
Empregando Filtros Ativos", Programa de Pós-Graduação em Engenharia Elétrica,
Universidade Federal de Santa Catarina, Florianópolis, Brasil, julho de 2000.
[9] Akagi, H., "Modern Active Filters and Traditional Passive Filters", Bulletin of the Polish
Academy of Sciences, 2006, vol. 54, n° 3. 2006.
[10] Johnson, J.R., "Proper use of active harmonic filters to benefit pulp and paper mills.
Industry Applications", IEEE Transactions on, vol. 38, n° 3, pp. 719-725, My/Jun 2002.
[11] Mohan, N., T. Undeland, and W. Robbins, "Power Electronics: Converters, Applications
and Design", 2nd edition: John Wiley & Sons. Inc, 1995.
[12] Parkatti, P., M. Routimo, and H. Tuusa, "Modification of a Commercial Frequency
Converter to an Active Power Filter in 690V Power System", International Exhibition &
Conference for Power Electronics Intelligent Motion Power Quality - PCSIM Europe
2007, Nuremberg, Germany, 22-24 may 2007.
[13] Ahmadian, J., H. Farzanehfard, R. Pouraghababa, M. Nouhi, "A Digital Time-Domain
Method for Instantaneous Harmonic Extraction in Active Power Line Conditioning",
136
International Exhibition & Conference for Power Electronics Intelligent Motion Power
Quality - PCSIM Europe 2007, Nuremberg, Germany, 22-24 may 2007.
[14] Gyugyi, L. and E.C. Strycuka, "Active AC Power Filters", IEEE IAS Annual Meeting. p.
529-535, 1976.
[15] Sasaki, H. and T. Machida, A New Method to Eliminate AC Harmonic Currents by
Magnetic Flux Compensation-Considerations on Basic Design. Power Apparatus and
Systems, IEEE Transactions on, 1971, vol. PAS-90, n° 5, p. 2009-2019, september 1971.
[16] Mohan, N., Peterson H. A., Long. W. F., "Active Filter for AC Harmonic Suppression",
IEEE/PES Winter Meeting, p. A77026-8, 1977.
[17] Akagi, H., Y. Kanazawa, and A. Nabae, "Instantaneous Reactive Power Compensators
Comprising Switching Devices without Energy Storage Components", Industry
Applications, IEEE Transactions on, vol. IA-20, n° 3, p. 625-630., may 1984.
[18] Shen-Yuan, K., T. L. Lee, C. A. Chen, P. T. Cheng, C. T. Pan, "Distributed Active Filters
for Harmonic Resonance Suppression in Industrial Facilities", Power Conversion
Conference - Nagoya, PCC '07, pp. 391-397, 2-5 april 2007.
[19]Tzung-Lin, L., P. T. Cheng, H. Akagi, H. Fujita, "A Dynamic Tuning Method for
Distributed Active Filter Systems". Industry Applications, IEEE Transactions on, 2008.
vol. 44, n° 2, p. 612-623, march-april 2008.
[20] Po-Tai, C. and L. Tzung-Lin, "Distributed Active Filter Systems (DAFSs): A New
Approach to Power System Harmonics", Industry Applications, IEEE Transactions on,
vol. 42, n° 5, pp. 1301-1309, Sept.-Oct. 2006.
[21] Fujita, H. and H. Akagi, "A practical approach to harmonic compensation in power
systems-series connection of passive and active filters", Industry Applications, IEEE
Transactions on, vol. 27, n° 6, pp. 1020-1025, Nov./Dec. 1991.
[22] Terciyanli, A., A. Acik, A. Cetin, T. Demirci, T. Kiline, "Thyristor Switched Reactor –
Active Power Filter Combination for Power Quality Solution of a Light Rail
Transportation System", International Exhibition & Conference for Power Electronics
Intelligent Motion Power Quality - PCSIM Europe 2007, Nuremberg, Germany, 22-24
May 2007.
[23] Dugan, R.C., M. F. McGranaghan, Santoso S., H. W. Beaty, "Electrical Power Systems
Quality", McGraw-Hill, 2004.
[24] Arrilaga, J. and N.R. Watson, "Power System Harmonics", 2nd ed., John Wiley & Sons
Ltd., England, 2003.
[25] Lago, P., A. Maciel, and A. Pereira, "Compensação de Energia Reativa na Presença de
Harmônicos: Caso Prático", Eletricidade Moderna, n° 429, dezembro de 2009.
[26] ANEEL, "Procedimentos de Distribuição de Energia Elétrica no Sistema Elétrico
Nacional - PRODIST, Módulo 8 -Qualidade da Energia Elétrica", Resolução n. 345/2008.
Agência Nacional de Energia Elétrica, 16/12/2008.
137
[27] ONS, "Gerenciamento dos Indicadores de Desempenho da Rede Básica e de seus
Componentes, Procedimenos de Rede - sub-módulo 2.8", revisão 1.0, resolução
normativa n. 372/09, Operador Nacional do Sistema Elétrico, 05/08/2009,
www.ons.org.br.
[28] Ribeiro, T.N., "Uma Discussão dos Critérios e Normas Relativos à Qualidade da Energia
Elétrica, in Programa de Pós-Graduação em Engenharia Elétrica", 1998, Pontifícia
Universidade Católica de Minas Gerais, setembro de 1998.
[29] ABB, "Guide to Harmonics with AC Drives, in Technical Guide", n° 6, ABB Automation
Group, 2000, www.abb.com/motor&drives.
[30] Kawann, C. and A.E. Emanuel, "Passive shunt harmonic filters for low and medium
voltage: a cost comparison study", Power Systems, IEEE Transactions on, vol. 11, n° 4,
p. 1825-1831, Nov. 1996.
[31] Mathan Mohan, P. and G. Amuthan, "Comparative evaluation of various single phase
harmonic filters for non-linear load", Advances in Engineering, Science and Management
(ICAESM), 2012 International Conference on, pp. 622-627, 30-31 March 2012.
[32] Doğan, H. and R. Akkaya, "A Simple Control Scheme for Single-Phase Shunt Active
Power Filter with Fuzzy Logic Based DC Bus Voltage Controller", Proceedings of the
International MultiConference of Engineers and Computer Scientists 2009 - IMECS
2009, Hong Kong, March 18, 2009.
[33] Kunjumuhammed, L.P. and M.K. Mishra, "Comparison of single phase shunt active
power filter algorithms", Power India Conference, 2006 IEEE, p. 8, 2006.
[34] Singh, B., K. Al-Haddad, and A. Chandra, "A universal active power filter for singlephase reactive power and harmonic compensation", Power Quality '98, pp. 81-87, Jun 18
1998.
[35] Salam, Z., T.P. Cheng, and A. Jusoh, "Harmonic Mitigation Using Active Power Filter: A
Technological Review", ELECTRIKA, vol. 8, n°2, pp. 17-26, 2006.
[36] Lemes, M.I. and F.R. Garcia, "Comparação técnico-econômica entre equipamentos
mitigadores de harmônicos e compensadores de energia reativa: Estudo de Caso", IX
CBQEE Conferência Brasileira sobre Qualidade da Energia Elétrica, Cuiabá, Mato
Grosso, Brasil, 1 de agosto de 2001.
[37] Afonso, J.L., Martins J. S., Aredes M. Watanabe E. H., "Filtro Ativo Paralelo com
Controle Digital de Baixo Custo", IV SBQEEE – Seminário Brasileiro sobre Qualidade
da Energia Elétrica, Porto Alegre, Rio Grande do sul, 12-17 de agosto de 2001.
[38] Lindeke, D., "Projeto de Um Filtro Ativo Paralelo de 1kVA Usando Técnicas de Controle
Analógico e Digital", Progrma de Pós-Graduação em Engenharia Elétrica, Universidade
Federal de Santa Catarina - UFSC, Florianópolis, Fevereiro de 2003.
[39] George, M. and K.P. Basu, "Three-Phase Shunt Active Power Filter", American Journal
of Applied Sciences,vol. 5, n° 8, p. 909-916, 2008.
138
[40] Carnovale, D.J., T.J. Dionise, and T.M. Blooming, "Price and Performance
Considerations for Harmonic Solutions", Power Systems World, Power Quality
Conference, Long Beach, Califórnia. 2003.
[41] Routimo, M., M. Salo, and H. Tuusa, "Improving the Active Power Filter Performance
with a Prediction Based Reference Generation",Nordic Workshop on Power and
Industrial Electronics, Norpie 2004.
[42] Wu, J.C. and H.L. Jou, "Simplified control method for the single-phase active power
filter", Electric Power Applications, IEE Proceedings, vol. 143, n°3, p. 219-224, May
1996.
[43] Abdusalam, M., P. Poure, and S. Saadate. "A New Control Method of Hybrid Active
Filter Using a Feedforward Loop Tuned at 5th and 7th Harmonic Frequency",
Electronics, Circuits and Systems, 2007, ICECS 2007, 14th IEEE International
Conference on, pp. 1191-1194, Dec. 2007.
[44] Detjen, D., Jacobs J., De Doncker R. W., Mall H.G., "A new hybrid filter to dampen
resonances and compensate harmonic currents in industrial power systems with power
factor correction equipment", Applied Power Electronics Conference and Exposition,
2001. APEC 2001. Sixteenth Annual IEEE, vol. 1., pp. 563-569.
[45] Ryan, M., "Power Quality - Reference Guide", Ontario, Canada, 1996.
[46] Bhattacharya, S. and H. Mirzaee. "Series Active Filter control and implementation for
utility interface of multiple adjustable speed drives", IECON 2010 - 36th Annual
Conference on IEEE Industrial Electronics Society, pp. 2663-2668, 7-10 Nov. 2010.
[47] Moran, L.A., Pastorini L., Dixon J., Wallace R., "A fault protection scheme for series
active power filters", Power Electronics, IEEE Transactions on, vol. 14, n° 5, p. 928-938,
Sep. 1999.
[48] Asiminoaei, L., F. Blaabjerg, and S. Hansen. "Evaluation of harmonic detection methods
for active power filter applications", Applied Power Electronics Conference and
Exposition, APEC 2005, Twentieth Annual IEEE, vol.1, pp. 635-641, 6-10 March, 2005.
[49] El-Habrouk, M. and M.K. Darwish, "Design and implementation of a modified Fourier
analysis harmonic current computation technique for power active filters using DSPs".
Electric Power Applications, IEE Proceedings, vol. 148, n° 1, p. 21-28, 2001.
[50] Akagi, H., S. Ogasawara, and K. Hyosung, "The theory of instantaneous power in threephase four-wire systems: a comprehensive approach. in Industry Applications
Conference",Thirty-Fourth IAS Annual Meetin, Conference Record of the 1999 IEEE,
vol. 1, pp. 431-439, 1999.
[51] Watanabe, E.H., H. Akagi, and M. Aredes. "Instantaneous p-q power Theory for
compensating nonsinusoidal systems", Nonsinusoidal Currents and Compensation,
ISNCC 2008. International School on, pp. 1-10, 10-13 June 2008.
139
[52] Depenbrock, M., V. Staudt, and H. Wrede, "A theoretical investigation of original and
modified instantaneous power theory applied to four-wire systems", Industry
Applications, IEEE Transactions on, vol. 39, n° 4, p. 1160-1168, 2003.
[53] Zhao, W., Luo Z., Shen Z. J., Wu C., "Injection-type hybrid active power filter in highpower grid with background harmonic voltage", Power Electronics, IET,vol. 4, n° 1, p.
63-71.
[54] Dobrucky, B., Kim H., Racek V., Roch M., Pokorny M., "Single-phase power active
filter and compensator using instantaneous reactive power method", Power Conversion
Conferenc,. PCC-Osaka 2002, Proceedings of the, pp. 167-171, Japan, 2002.
[55] Chin-Lin, C., C.E. Lin, and C.L. Huang. "An active filter for unbalanced three-phase
system using synchronous detection method", Power Electronics Specialists Conference,
PESC '94 Record., 25th Annual IEEE, vol. 2, pp. 1451-1455, 20-25 June 1994.
[56] Takeda, M., K. Ikeda, and Y. Tominaga, "Harmonic Current Compensation with Active
Filter", IEEE IAS Annual Meeting, p. 808-815, 1987.
[57] Bhattacharya, S., C. Po-Tai, and D.M. Divan, "Hybrid solutions for improving passive
filter performance in high power applications", Industry Applications, IEEE Transactions
on, vol. 33, n° 3, p. 732-747, May/June 1997.
[58] Saitou, M., N. Matsui, and T. Shimizu. "A control strategy of single-phase active filter
using a novel d-q transformation", Industry Applications Conference, 2003. 38th IAS
Annual Meeting. Conference Record of the, vol. 2., p. 1222-1227, Oct. 2003.
[59] Tzung-Lin, L., W. Yen-Ching, and L. Jian-Cheng. "Design of a hybrid active filter for
harmonics suppression in industrial facilities", Power Electronics and Drive Systems,
PEDS 2009, International Conference on., pp. 21-126, 2-5 Nov, 2009.
[60] Amuda, L.N., B. J. Cardoso Filho, S. M. Silva, A. S. A. C. Diniz, "Wide bandwidth
single and three-phase PLL structures for grid-tied PV systems", Photovoltaic Specialists
Conference, Conference Record of the Twenty-Eighth IEEE, pp. 1660-1663, 2000.
[61] Santos Filho, R.M., P. F. Seixas, P. C. Cortizo, L. A. B. Torres, A. F. Souza,
"Comparison of Three Single-Phase PLL Algorithms for UPS Applications", Industrial
Electronics, IEEE Transactions on, vol. 55, n° 8, p. 2923-2932, august 2008.
[62] Tian, J., Q. Chen, and B. Xie, "Series hybrid active power filter based on controllable
harmonic impedance", Power Electronics, IET, vol. 5, Issue 1, p. 142-148, 2012.
[63] Rastogi, M., N. Mohan, and A. Edris, "Hybrid-active filtering of harmonic currents in
power systems", Power Delivery, IEEE Transactions on, vol. 10, n° 4, p. 1994-2000,
october 1995.
[64] Encarnação, L., A.G. Merçon, and H.H. Almeida, "Hybrid Filters to Damp Harmonic
Resonance in Power Transmission Systems", in Eletrônica de Potência. vol. 11, n° 1, p.
25-32, março de 2006.
[65] Bhattacharya, S. and D. Divan. "Active filter solutions for utility interface of industrial
loads",Power Electronics, Drives and Energy Systems for Industrial Growth,
140
Proceedings of the 1996 International Conference on, vol. 2, pp. 1078-1084, 8-11
January 1996.
[66] Dalvand, H. and V.G. Agelidis. "Application of a variable inductor in single-phase hybrid
harmonic filters", Harmonics and Quality of Power (ICHQP), 2010 14th International
Conference on, pp. 1-6, 26-29 Sept. 2010.
[67] Fang Zheng, P., H. Akagi, and A. Nabae, "A new approach to harmonic compensation in
power systems-a combined system of shunt passive and series active filters", Industry
Applications, IEEE Transactions on, vol. 26, n°6, p. 983-990, 1990.
[68] Bhattacharya, S. and D. Divan. Synchronous frame based controller implementation for a
hybrid series active filter system. in Industry Applications Conference, 1995. Thirtieth
IAS Annual Meeting, IAS '95., Conference Record of the 1995 IEEE. 1995.
[69] Suresh, S., M. Geetha, and N. Devarajan, "A Novel Control Algorithm for Hybrid Power
Filter to Compensate Three Phase Four-Wire Systems", IJAEST - International Journal
of Advanced Engineering Sciences and Technologies, vol. 3, n° 1, p. 1-11, pp. 1-11,
2011.
[70] Po-Tai, C., S. Bhattacharya, and D. Divan, "Experimental verification of dominant
harmonic active filter for high-power applications", Industry Applications, IEEE
Transactions on, vol. 36, n° 2, p. 567-577, March/April 2000.
[71] Asadi, M. and A. Jalilian. "Using magnetizing reactances of transformer in hybrid active
power filter", Power Electronics, Drive Systems and Technologies Conference
(PEDSTC), 2011 2nd, pp. 268-273, 16-17 Feb. 2001.
[72] Balbo, N., D. Sella, R. Penzo, G. Bisiach, D. Cappellieri, L. Malesani, A. Zuccato,
"Hybrid active filter for parallel harmonic compensation", Power Electronics and
Applications, Fifth European Conference on., vol. 8, pp. 133-138, 13-16 Sep. 1993.
[73] Po-Tai, C., S. Bhattacharya, and D.M. Divan, "Control of square-wave inverters in highpower hybrid active filter systems", Industry Applications, IEEE Transactions on, vol.
34, n° 3, p. 458-472, May/June 1998.
[74] Van Zyl, A., J.H.R. Enslin, and R. Spee. "Converter based solution to power quality
problems on radial distribution lines", Industry Applications Conference, Thirtieth IAS
Annual Meeting, IAS '95., Conference Record of the 1995 IEEE, pp. 2573-2580, 1995.
[75] Isoni, M., "Correção de Fator de Potência de Cargas Industriais com Dinâmica Rápida",
Programa de Pós-Graduação em Engenharia Elétrica, Universidade Federal de Minas
Gerais - UFMG, Belo Horizonte, novembro de 2009.
[76] Kreikebaum, F., D. Das, J. Hernandez, D. Divan, "Ubiquitous power flow control in
meshed grids", Energy Conversion Congress and Exposition, ECCE 2009, IEEE, pp.
3907-3914, 20-24 Sept. 2009.
[77] Johal, H. and D. Divan, Design Considerations for Series-Connected Distributed FACTS
Converters. Industry Applications, IEEE Transactions on, 2007. 43(6): p. 1609-1618.
141
[78] Johal, H. and D. Divan. "From Power Line to Pipeline - Creating an Efficient and
Sustainable Market Structure", Energy 2030 Conference. ENERGY 2008, IEEE., Atlanta,
Georgia, 17-18 November 2008.
[79] da Silva, S.A.O., R. Novochadlo, and R.A. Modesto, "Single-phase PLL structure using
modified p-q theory for utility connected systems",Power Electronics Specialists
Conference,. PESC 2008, IEEE, pp. 4706-4711, 15-19 June 2008.
[80] Shinnaka, S., "A Robust Single-Phase PLL System With Stable and Fast Tracking",.
Industry Applications, IEEE Transactions on, vol. 44, n° 2, 624-633, March-April 2008.
[81] Da Silva, S.A.O., L. B. G. Campanhol, A. Goedtel, C. F. Nascimento, D. Paiao, "A
comparative analysis of p-PLL algorithms for single-phase utility connected systems",
Power Electronics and Applications, 2009. EPE '09. 13th European Conference on, pp.
1-10, 8-10 Sept. 2009.
[82] Rodriguez, P., J. Pou, J. Beargas, J. I. Candela, R. P. Burgos, D. Boroyevich, "Decoupled
Double Synchronous Reference Frame PLL for Power Converters Control", Power
Electronics, IEEE Transactions on, vol. 22, n° 2, p. 584-592., March 2007.
[83] Meersman, B., B. Renders, L. Degroote, T. Vandoorn, L. Vandelvelde, "DC-bus Voltage
Controllers for a Three-Phase Voltage-Source Inverter for Distributed Generation",
International Conference on Renewable Energies and Power Quality (ICREPQ09),
European Association for The Development of Renewable Energies, Environment and
Power Quality: Valencia, Spain, April, 2009.
[84] Axente, T., M. Basu, M. F. Conlon, K. Gaughan, "Protection of DVR against Short
Circuit Faults at the Load Side", Power Electronics, Machines and Drives, The 3rd IET
International Conference on, pp. 627-631, March 2006.
[85] Axente, I., M. Basu, M. F., Conlon, K. Gaughan, "Protection of unified power quality
conditioner against the load side short circuits", Power Electronics, IET, vol. 3, n° 4, p.
542-551, July 2010.
[86] Bitoleanu, A., M. Popescu, and M. Dobriceanu, "About the harmonics at to the input of
DC motor and controlled rectifier driving systems", Power Electronics, Electrical Drives,
Automation and Motion. SPEEDAM 2006. International Symposium on, vol. 2, p. 797802.
[87] Freitas, E., "Estudo do Retificador Híbrido Multipulsos de Elevado Fator de Potência e
reduzida Distorção Harmônica de Corrente no Contexto da Qualidade da Energia
Elétrica", Dissertação de Mestrado, 258A/06, Departamento de Engenharia Elétrica PPGENE, Universidade de Brasília, Brasília, pgs. 117, 2006.
[88] Mayordomo, J.G., A. Hernández, R. Asensi, L. F. Beites, M. Izzeddine, "A unified theory
of uncontrolled rectifiers, discharge lamps and arc furnaces. I. An analytical approach for
normalized harmonic emission calculations", Harmonics and Quality of Power
Proceedings, 1998. Proceedings. 8th International Conference On, vol. 2, pp. 740-748,
14-18 Oct. 1998.
142
[89] Jagiela, K., M. Gala, Rak J., M. Kepinski, K. Szewezyk, "Analysis of electric energy
quality in arc furnace system with follow-up SVC compensation", Electrical Power
Quality and Utilisation, EPQU 2009. 10th International Conference on, pp. 1-5, 15-17
Sept. 2009.
[90] Surapong, C., C. Y. Yu, D. Thukaram, T. Nipon, K. Damrong, "Minimization of the
effects of harmonics and voltage dip caused by electric arc furnace", Power Engineering
Society Winter Meeting, IEEE, vol. 4, pp. 2568-2576, 2000.
[91] van Niekerk, C.R., A.P.J. Rens, and A.J. Hoffman, "Identification of types of distortion
sources in power systems by applying neural networks", Africon Conference in Africa,
2002. IEEE AFRICON. 6th, vol. 2, pp. 829-834, 2-4 Oct. 2002.
[92] Mendis, S.R. and D.A. Gonzalez, "Harmonic and transient overvoltage analyses in arc
furnace power systems", Industry Applications, IEEE Transactions on, vol. 28, n°2, p.
336-342, March/April 1992.
[93] Haruni, A.M.O., K.M. Muttaqi, and M. Negnevitsky, "Analysis of harmonics and voltage
fluctuation using different models of Arc furnace", Power Engineering Conference, 2007.
AUPEC 200, Australasian Universities, pp. 1-6, 9-12 Dec. 2007.
[94] "IEEE Recommended Practice for Establishing Transformer Capability When Supplying
Non-sinusoidal Load Currents", IEEE Std C57.110-1998, July 1998.
[95]"NBR – 7094 Máquinas Elétricas Girantes – Motores de Indução Especificação",
ABNT/CB-03 – Comitê Brasileiro de Eletricidade - Associação Brasileira de Normas
Técnicas, 2003.
[96] Guide to Harmonics, Staco Energy Products Co., www.stacoenergy.com.
143
ANEXOS
A.1. Harmônicos – Fontes e efeitos em equipamentos elétricos
A.1.1. Introdução
Com o objetivo de evidenciar os principais aspectos considerados no desenvolvimento do
trabalho, neste capítulo é realizada uma revisão geral sobre harmônicos descrevendo suas
principais fontes e os efeitos nos principais elementos dos sistemas industriais
A.1.2. Principais fontes de harmônicos
As principais fontes de harmônicos são as denominadas cargas não-lineares, ou seja, cargas
nas quais a relação entre tensão terminal e corrente não seguem uma proporção direta,
definida pela Lei de Ohm. Existem diversos tipos de cargas não-lineares, porém, as principais
cargas não-lineares de interesse em sistemas industriais e comerciais podem ser agrupadas
em: retificadores não-controlados, retificadores controlados, dispositivos a arco e dispositivos
saturáveis. Nas subseções seguintes iremos evidenciar as principais características de cada
grupo.
Retificadores Não-Controlados
Retificadores não-controlados são equipamentos que convertem energia na forma alternada
CA para forma contínua CC utilizando diodos em sua estrutura. Uma grande variedade de
equipamentos utiliza retificadores como interface com a rede de energia alternada. Esses
equipamentos podem variar desde pequenas fontes chaveadas monofásicas utilizadas em PCs,
PLCs e outros dispositivos eletrônicos de baixa potência, até dispositivos de grande potência
utilizados em sistemas de acionamento de motores de corrente contínua utilizados em grandes
sistemas de laminação da indústria siderúrgica. Nas subseções seguintes serão apresentados a
topologia básica e espectro harmônico típico dos principais tipos de retificadores nãocontrolados
144
Retificadores monofásicos
Os retificadores monofásicos com filtro capacitivo utilizados em fontes chaveadas, como
mostrado no exemplo da figura A.1, são conectados diretamente à rede CA. O espectro
harmônico típico deste tipo de carga é apresentado na figura A.2. É interessante mencionar o
significativo conteúdo de terceiro harmônico observado no espectro de corrente drenada por
este tipo de carga, o qual na grande maioria das vezes representa uma componente de
seqüência zero, na qual as correntes harmônicas apresentam a mesma fase nas três fases do
sistema, somando-se no condutor de neutro. Essa corrente de neutro de terceiro harmônico
resulta em aumento de perdas nos condutores e sobreaquecimento de transformadores de
alimentação. Quando as componentes harmônicas 3º, 9º, 15º, etc (normalmente seqüência
zero) apresentam diferentes amplitudes entre as fases, devido a desequilíbrios de carga por
exemplo, esses harmônicos apresentam componentes de seqüência positiva e negativa além da
seqüência zero, o que pode aumentar os requisitos de filtragem do sistema [23].
Figura A.1: Circuito básico de uma fonte chaveada [23].
145
Figura A.2: Corrente de entrada (a) de uma fonte chaveada e respectivo espectro harmônico
(b) [23].
Retificadores trifásicos
Na figura A.3 é apresentada a estrutura básica de um retificador trifásico. Embora para baixas
potências os retificadores trifásicos sejam conectados diretamente à rede de energia, na
medida em que a potência dos sistemas aumenta, tem se tornado prática comum a introdução
de reator de entrada para a melhoria da distorção de corrente drenada pelo equipamento. Esse
reator pode ser introduzido tanto do lado CA quando no lado CC do conversor, apresentando
efeito similar em ambos os casos com relação à distorção de corrente, porém apresentando
diferenças com relação a outros aspectos de aplicação, como, por exemplo, necessidade de
maior capacidade de taxa de variação de corrente quando da aplicação de filtro ativo no caso
de utilização de reator no link CC do conversor ([65], [86]).
Na figura A.4 é apresentada a corrente de entrada de um retificador com indutor de entrada Ls
com reatância de 3% (3% de queda de tensão na frequência nominal e na condição de
146
potência nominal do conversor) e na figura 2.5 é mostrada a relação entre a THD de corrente
e a impedância de entrada Ls. Pode ser verificado na figura 2.5 que a introdução de um reator
de entrada pode reduzir a THD de 100%, quando não há reator de entrada, a até 33% com
reator de 3%. É importante ressaltar que mesmo com a introdução do reator de entrada o nível
de distorção harmônica de corrente resultante pode, caso a potência do conversor seja
significativamente alta com relação às demais cargas sistema, implicar em não atendimento
aos critérios estabelecidos na norma IEEE 519, principal padrão utilizado internacionalmente.
Cabe lembrar ainda a possibilidade de excitação de ressonâncias no sistema, podendo resultar
na amplificação dos efeitos dos harmônicos característicos gerados por este tipo de conversor.
Figura A.3: Estrutura básica de um retificado trifásico.
Corrente de Entrada - Retificador Trifásico com Ls = 3%
60
40
Is (A)
20
0
-20
-40
-60
0
10
20
30
40
50
60
70
t (ms)
Figura A.4: Corrente de entrada de um retificador trifásico com reator de entrada de 3%.
147
Figura A.5: Espectro harmônico da corrente de entrada apresentada na figura A.4.
THDi x Ls%
140
120
THD i (%)
100
80
60
40
20
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Ls%
Figura A.6:Distorção harmônica de corrente (THDi) x reatância % do indutor de entrada
148
Retificadores Trifásicos Multi-pulsos
Os retificadores multi-pulsos são estruturas derivadas da estrutura básica apresentada na
figura A.3. Nas estruturas de retificadores multipulsos são utilizadas combinações de
defasamentos angulares que implicam em cancelamento de uma parcela dos harmônicos
gerados por cada retificador trifásico, reduzindo a distorção de corrente vista pela fonte [87].
A utilização de retificadores multipulsos implica em utilização de transformadores de
múltiplos enrolamentos (Delta/Delta – Estrela(Y) para o retificador de 12 pulsos, por
exemplo) ou combinações de transformadores com secundário em Y, Delta e/ou zigzag.
Na figura A.7 é apresentado um retificador de 12 pulsos utilizado como estágio de entrada de
um conversor de fequência. Na figura A.8 são indicadas as conexões dos enrolamentos do
transformador necessário para o funcionamento deste retificador em conjunto com os
diagramas fasoriais correspondentes, evidenciando a defasagem angular de 30 graus elétricos
entre os secundários ligados em estrela (Y) e triângulo (D), característico para operação 12
pulsos. Na figuras A.9 e A.10 são apresentados a forma de onda e o respectivo espectro
harmônico da corrente de entrada deste conversor, respectivamente. Na tabela A.1 é
apresentado um comparativo entre retificadores trifásicos simples (6 pulsos) e retificador de
12 pulsos, evidenciando as características de THDi, fator de potência e custo
(desconsiderando-se o custo do transformador).
149
Figura A.7: Estrutura de um retificador de 12 pulsos (conexão série ou paralela de duas pontes
K
V CA
Kd
dV
AB
de 6 pulsos).
A
VC
KY
Figura A.8: Esquema elétrico e respectivo diagrama fasorial de um transformador
Delta/Delta-Estrela para a alimentação de um retificador trifásico de 12 pulsos.
TT
12 >
1) Ch 1: 100 mV 5 ms
2) Ref A: 200 mV 5 ms
Figura A.9: Forma de onda típica da corrente de entrada de um conversor 12 pulsos
(corrente no primário do transformador)
150
100%
90%
80%
70%
60%
50%
40%
30%
20%
10%
0%
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16 17 18 19 20 21 22
Figura A.10: Espectro harmônico típico da corrente de entrada (medição no primário do
transformador) de um retificador 12 pulsos.
Tabela A.1: Comparação entre retificadores trifásicos 6 pulsos e 12 pulsos.
Tipo de
Retificador
THD (I)
Típico
Fator de
Potência
Custo
6 pulsos +
Reatância de Rede
ou Bobina C.C.
40%
0.90
100%
12 Pulsos
12%
0.98 a 0.99
150%
Na prática industrial, os retificadores de 12 e 18 pulsos (3 pontes de 6 pulsos) são os mais
utilizados, porém, também são encontradas configurações de 24 e 36 pulsos em sistemas
industriais de grande potência. Cabe salientar que a principal barreira para a utilização de
retificadores multipulsos é o custo associado do transformador, o qual aumenta
significativamente com o aumento do número de pulsos.
É fato conhecido também que, nas configurações de 18 pulsos e principalmente acima (24 e
36 pulsos), existem dificuldades construtivas associadas ao transformador, tais como número
discreto de enrolamentos e grande número de conexões e formatos de núcleo, os quais
implicam em assimetrias de impedâncias entre fases e defasagens angulares diferentes das
ideais, de forma que o cancelamento de harmônicos pode ficar comprometido podendo-se, em
151
muitos casos, não obter-se a redução esperada do conteúdo harmônico da corrente de entrada,
e ainda ter assumido um custo de implementação significativamente maior.
Retificadores Controlados
Retificadores controlados são estruturas semelhantes aos retificadores não-controlados porém
utilizam componentes de potência comandáveis no lugar dos diodos, normalmente tiristores
de potência. Um exemplo deste tipo de equipamento trata-se de um acionamento de máquina
de corrente contínua, mostrado na figura A.11.A figura A.12 apresenta o espectro harmônico
da corrente de entrada obtido através de simulação utilizando Simulink® considerando a
frequência fundamental de 60Hz. De acordo com [86], nesses tipos de retificadores, os
harmônicos característicos são determinados de forma semelhante ao retificador nãocontrolado, utilizando-se a relação (2.1), conforme IEC 61000-2-1, onde k é a ordem do
harmônico.
Figura A.11: Acionamento de máquina CC por retificador controlado.
Ik
1
=
1, 2
I1
5
k −
k
(A.1)
152
Figura A.12: Espectro harmônico da corrente de entrada de um retificador controlado.
Nos retificadores controlados, além da geração dos harmônicos ímpares característicos
também ocorre a geração de inter-harmônicos [3]\, harmônicos pares e harmônicos triplos.
Esses harmônicos adicionais aprecem em virtude da existência de assimetrias no disparo dos
dispositivos semicondutores, variação de carga e assimetrias existentes no sistema de
alimentação (assimetrias de tensão e das indutâncias de dispersão dos transformadores de
potência) [2], de forma semelhante aos softstarters [3] que apesar de serem conversores
CA/CA utilizam dispositivos controlados em sua estrutura e têm sido cada vez utilizados para
a partida de grandes motores, inclusive na média tensão industrial A presença de harmônicos
não-característicos nesses tipos de conversores aumenta a possibilidade de excitação das
freqüências de ressonância do sistema podendo resultar em distorções de tensão e/ou
ocorrente intoleráveis, de forma que seja necessária a implementação de alguma estratégia de
mitigação.
153
Dispositivos a Arco
Nesta categoria de equipamentos geradores de harmônicos estão incluídos fornos a arco,
máquinas de solda por arco e dispositivos de iluminação do tipo descarga (lâmpadas
fluorescentes, vapor de mercúrio e vapor de sódio) com reator magnético [88]. O circuito
equivalente de dispositivos a arco é apresentado na figura A.13, onde o arco é, basicamente,
uma fonte de tensão, a qual apresenta componentes harmônicas, em série com um reator que
limita a corrente do dispositivo.
Figura A.13:Circuito equivalente de um dispositivo à arco [23].
A característica tensão-corrente do arco elétrico é não-linear. A partir da ignição do arco, a
tensão decresce enquanto a corrente aumenta, limitada somente pela impedância do sistema.
Esse comportamento confere ao arco a característica aparente de resistência negativa em uma
parte de seu ciclo de operação.
Dentre os dispositivos dessa classe, os fornos à arco, utilizados nas indústrias siderúrgica e
metalúrgica, são os grandes causadores de problemas relacionados à distorção harmônica. Isso
é devido ao fato de que normalmente os fornos a arco, com potências da ordem de megawatts
[89], representam uma parcela significativa da carga instalada da maioria das indústrias que
os utilizam [90]. Assim, a distorção gerada pelos fornos apresenta grande potencial para
influenciar o comportamento de toda a instalação elétrica onde esses fornos estão instalados.
Nos fornos a arco, a impedância limitadora é, primariamente, a dos cabos e terminais com
alguma contribuição do sistema de potência e transformador do forno. O conteúdo harmônico
de um forno a arco e outros dispositivos a arco é similar ao conteúdo harmônico gerado por
dispositivos de iluminação baseados em reatores magnéticos, apresentado na figura 2.14.
154
Figura A.14: Forma de onda de uma lâmpada fluorescente com reator magnético (a) e
respectivo espectro harmônico (b) [23].
As duas fases de operação dos fornos a arco são: o estágio de derretimento e o estágio de
refinamento. As magnitudes das componentes harmônicas são diferentes entre os estágios de
operação do forno, sendo que o estágio de derretimento apresenta amplitudes maiores que o
estágio de refinamento. Isso acontece devido ao fato de que no estágio de derretimento uma
condição desbalanceada ocorre: a condução desigual dos eletrodos do forno. A condução
desbalanceada entre os eletrodos resulta na circulação de harmônicos triplos (principalmente o
terceiro) no sistema de alimentação, independente do tipo de conexão do transformador [23].
Variações no material a ser derretido e nas distâncias do eletrodo ao material, principalmente,
quando ajustado manualmente, conferem uma característica variável ao espectro harmônico
dos fornos a arco [91], [92], [93]. A tabela A.2, obtida a partir da referência [91] apresenta os
valores das amplitudes dos harmônicos de três fornos a arco durante seus estágios de
refinamento.
155
Tabela A.2: Conteúdo harmônico da corrente de três fornos a arco [91].
Ordem
Forno 1
Forno 2
Forno 3
2
3,2
4,1
4,5
3
4,0
4,5
4,7
4
1,1
1,8
2,8
5
3,2
2,1
4,5
6
0,6
Não informado
1,7
7
1,3
1,0
1,6
8
0,4
1,0
1,1
9
0,5
0,6
1,0
Dispositivos Saturáveis
Os dispositivos saturáveis a que nos referimos são os equipamentos baseados no princípio de
indução magnética que possuem núcleos de material ferromagnético. Os principais
equipamentos dessa classe são os transformadores e motores elétricos. A geração de
harmônicos a partir desses dispositivos é originada pela característica de magnetização nãolinear dos materiais ferromagnéticos utilizados em sua construção, conforme apresentado na
figura A.15 [23].
Figura A.15: Corrente de magnetização de um transformador [23].
156
Nos transformadores a parcela não-linear da corrente drenada por esses equipamentos é
formada pela corrente de magnetização, apresentada juntamente com seu espectro harmônico
na figura A.16, a qual, normalmente, corresponde a cerca de 1% da corrente nominal do
equipamento. Na prática os transformadores não são considerados como fontes significativas
de harmônicos, a não ser em sistemas de distribuição com um grande número de
transformadores. Os harmônicos em transformadores são mais facilmente identificados em
condições de operação a baixa carga, onde a probabilidade de operação acima do joelho da
curva de magnetização é maior.
Figura A.16: Corrente de magnetização de um transformador e respectivo espectro harmônico
[23].
157
A.1.3. Efeitos dos Harmônicos nos Principais Equipamentos Elétricos
Industriais
Transformadores
Os transformadores são projetados para transferir uma determinada potência com o mínimo
de perdas na freqüência fundamental. Quando as cargas alimentadas por um transformador
são não-lineares, gerando distorção harmônica na corrente drenada, o resultado é a geração de
perdas adicionais, as quais impactam diretamente no comportamento térmico do
transformador implicando em aumento de temperatura e conseqüente diminuição da vida útil
do equipamento.
Apesar de melhorias construtivas serem possíveis, tais como o uso de cabos transpostos ao
invés de condutores sólidos [23], ou a utilização de dutos de refrigeração, normalmente é
utilizado um fator de derating no transformador quando a distorção de corrente excede 5%. O
fator de derating é aplicado com o objetivo de manter o nível de aquecimento do
transformador compatível com os níveis de temperatura de trabalho das classes do sistema
isolante e do material magnético utilizado núcleo.
O aquecimento adicional resultante da distorção harmônica da corrente no transformador é
originado por três efeitos:
•
Aumento da corrente eficaz: I rms = I 12 + I 32 + I 52 + L + I h2
•
Perdas associadas às correntes parasitas induzidas pelas componentes harmônicas
de força magnetomotriz geradas pelas correntes harmônicas que percorrem o
enrolamento do transformador
•
Perdas no núcleo associadas ao aumento da distorção harmônica da tensão que, por
sua vez, aumentam as correntes parasitas no núcleo.
O padrão ANSI/IEEE C57.110-1998 [94], Recommended Practices for Estabilishing
Transformer Capability When Supplying Nonsinusoidal Load Currents apresenta orientações
bastante utilizadas em aplicações práticas. As considerações do referido padrão são baseadas
num fator de derating apresentado na equação A.2.
158
∑ (I h )
∑I
2
h
K=
2
(A.2)
h
2
h
h
A expressão (A.3), baseada no uso do fator K da equação (2.2), é utilizada para determinar a
corrente permitida para o transformador:
I max =
1 + PEC . R
(I R )
1 + KPEC . R
(A.3)
Onde IR é a corrente eficaz nominal do transformador é PEC.R é razão entre as perdas por
correntes parasitas e as perdas I2R nominais [94]. Em [23] são apresentadas considerações
adicionais a respeito de transformadores quando da presença de harmônicos de seqüência
zero, offsets DC de corrente e indução de correntes parasitas em peças metálicas, as quais
representam aspectos importantes para análise e solução de problemas nesses equipamentos.
Motores
Motores podem ser significativamente impactados pela distorção harmônica de tensão. A
norma NBR 7094 para motores de indução [95] e o padrão IEEE 519-1992 estabelecem que o
motor só será capaz de fornecer seu conjugado nominal caso a distorção harmônica total de
tensão - THD e a amplitude máxima de cada harmônico individual sejam inferiores a 5% e a a
3% da tensão fundamental, respectivamente. A presença de tensões harmônicas em motores
implica na presença de fluxos harmônicos no material ferromagnético do motor, o que por sua
vez resulta em [23] e [94]:
•
Aumento das perdas e redução da eficiência;
•
Presença de conjugados pulsantes;
•
Vibrações mecânicas;
•
Elevação de temperatura.
159
Bancos de Capacitores
Os capacitores possuem a característica de que sua impedância é inversamente proporcional à
freqüência de excitação. A presença de distorção de tensão implica em aumento da corrente
eficaz e das perdas dielétricas nos capacitores, as quais podem ser calculadas a partir da
equação A.5 [94] , onde tan δ = R/(1/ωC) é o fator de perdas do capacitor, ωn = 2πfn e Vn é a
tensão eficaz do enésimo harmônico. Outro fator a ser levado em consideração é que a
potência reativa total fornecida pelo capacitor, determinada pela equação A.4 não deve
exceder a potência reativa nominal, levando ainda em consideração os efeitos de sobretensões
admissíveis e tolerâncias de fabricação
∞
PD = ∑ C (tan δ )ω nVn2
(A.4
n =1
N
QT = ∑ Q n
(A.5
n =1
A presença de bancos de capacitores apresenta ainda um aspecto muito importe – a
possibilidade de ressonâncias série e paralela entre os capacitores e o resto do sistema, as
quais podem resultar em altas tensões e correntes, aumentando drasticamente as perdas e
sobreaquecimento dos capacitores, levando a uma rápida destruição dos mesmos, assim como
dos equipamentos conectados ao sistema em ressonância. Na referência [25] é apresentado um
exemplo bastante representativo de sistema com ocorrência de ressonâncias. O artigo trata de
um sistema de carga de baterias existente na fábrica de baterias Moura. Nesse caso o sistema
de compensação de reativos existente, baseado em bancos automáticos utilizando contatores
para manobra de capacitores, sintonizava as freqüências de ressonância do sistema nas
freqüências harmônicas geradas pelos conversores utilizados no processo de formação (carga)
das baterias. Essa condição resultou na sobrecarga dos condutores de neutro do transformador
de alimentação do sistema, redução de vida útil e eventuais explosões de células capacitivas.
Outra conseqüência significativa era a operação do sistema com baixo fator de potência. As
ressonâncias série e paralela são discutidas nas subseções seguintes.
160
Ressonância Paralela
A ressonância paralela pode ser entendida a partir da visualização de um exemplo. A figura
A17 (extraída de [23]) apresenta um sistema com potencial para ocorrência de problemas com
ressonância paralela. Do ponto de vista das fontes harmônicas, o capacitor aparece em
paralelo com a impedância equivalente do sistema (indutâncias do transformador e da fonte),
uma vez que a fonte é considerada ser composta apenas pela componente de freqüência
fundamental, representando um curto-circuito para as freqüências harmônicas. Se assumirmos
que a impedância do sistema é puramente indutiva, a freqüência de ressonância paralela pode
ser calculada a partir da potência de curto-circuito SS, a potência reativa do banco de
capacitores SC e a freqüência fundamental f, através da equação A.6 [94].
S
f p = f S
SC
(A.6)
Na ressonância paralela a fonte harmônica enxerga uma alta impedância, resultando numa alta
distorção de tensão. Nos ramos em ressonância paralela são verificadas altas correntes. A
severidade da ressonância também é fortemente dependente das resistências envolvidas no
circuito, as quais contribuem para o amortecimento do efeito ressonante.
Figura A.17: Sistema com potencial para ocorrência de ressonância paralela [23].
161
Ressonância Série
O potencial para ressonância série ocorre em situações onde o capacitor e a indutância do
transformador de distribuição se apresenta como um circuito LC série do ponto de vista da
fonte harmônica, como na figura A18. Essa condição pode ser verificada por um consumidor
que apesar de não possuir carga não-linear significativa, utiliza capacitores para correção de
fator de potência e compartilha uma rede em que existam fontes harmônicas [23] . A
ressonância série é evidenciada no circuito simplificado da figura A.19. A figura A.20
apresenta a resposta em freqüência referente ao circuito da figura A.19, onde pode ser
verificada também a ocorrência de uma ressonância paralela.
Figura A18 – Sistema com potência para ressonância série [23].
Figura A.18: circuito com potência para ressonância série [23] .
162
Figura A.19: Resposta em freqüência do circuito da figura A.19 [23].
Equipamentos Eletrônicos
Controles eletrônicos são freqüentemente dependentes da identificação da passagem por zero
ou pelo pico de tensão para a realização da correta função de controle. A presença de
harmônicos de tensão pode significativamente alterar esses parâmetros implicando em
alteração das características de funcionamento de tais equipamentos, podendo inclusive
resultar em operação errática de acionamentos estáticos e falha prematura de equipamentos
[45]. Em [7] é relatada a freqüente ocorrência de falhas em acionamentos, aceleração de
relógios, queima de fontes de computadores e mal-funcionamento de sistema de iluminação.
Equipamento de Seccionamento e Proteção – Disjuntores, contatores,
seccionadores e fusíveis.
O principal efeito verificado nessa classe de equipamentos é a elevação de temperatura
associado ao aumento das perdas elétricas provocados pelo conteúdo harmônico. Na medida
em que o efeito pelicular é mais pronunciado nas freqüências harmônicas essas correntes
circulam principalmente na periferia dos condutores. Como conseqüência da reduzida área
equivalente, a resistência efetiva para a componente harmônica é maior em relação à
componente fundamental contribuindo para elevação de perdas e respectivo aquecimento nos
163
materiais condutores. Esse aquecimento adicional provoca [45] a atuação indevida de
disjuntores e fusíveis e degradação acelerada de seccionadores e contatores. A presença de
distorção harmônica de corrente pode acarretar ainda em ocorrência excessiva de arco elétrico
em dispositivos de manobra, reduzindo sua vida útil [96].
164
A.2. Diagramas e códigos utilizados nas simulações.
Figura A.20: Diagrama de implementação do bloco “Impedância Ativa” da figura 4.1.
165
Figura A.21: Diagrama de implementação do bloco “Filtro Ativo” da figura A.20.
166
Figura A.22: Diagrama de implementação do bloco “PLL” da figura A.21.
Figura A.23: Diagrama de implementação do conversor PWM transformador de
acoplamento.
167
Código Matlab para implementação do PLL monofásico
function [Iq_fund,angulo] = PLLf(I_alfa,Kp,Ki,Ts)
% This block supports an embeddable subset of the MATLAB language.
% See the help menu for details.
%==========================================================================
% Sintonia do PLL
tau = 0.001;
K = 1.0;
%==========================================================================
dt = Ts;
% Intervalo de integração
f0 = 60;
Wff = 2*pi*f0;
%==========================================================================
% inicializacao de variaveis para simulação
persistent executa I
persistent
I_n1 I_n2 I_n3 Iq_flt_n1 Iq_flt_n2 Iq_flt_n3 ddt_teta erro_n1
int_erro
persistent
Wfbk Wfbk_n1 Iq_ref teta dIq_dt Id_ref int_Wfbk
if isempty(executa)
I_n1 = 0;
I_n2 = 0;
I_n3 = 0;
Iq_flt_n1 = 0;
Iq_flt_n2 = 0;
Iq_flt_n3 = 0;
ddt_teta = Wff;
erro_n1 = 0;
int_erro = 0;
erro_5h_n1 = 0;
Wfbk = 0;
Wfbk_n1 = 0;
Iq_ref = 0;
teta = 0;
dIq_dt = 0;
Id_ref = 0;
int_Wfbk = 0;
end
teta = teta+ddt_teta*dt;
if teta > pi
teta = teta-2*pi;
elseif teta<-pi
teta = teta+2*pi;
end
Iq_ref = Iq_ref+dIq_dt*dt;
I_beta = Iq_ref*sin(teta);%-Iq_ref*sin(teta);
Iq = I_alfa*cos(teta)+I_beta*sin(teta);%I_alfa*cos(teta)I_beta*sin(teta);
dIq_dt = (1/tau)*(K*Iq-Iq_ref);
Id = I_alfa*sin(teta)I_beta*cos(teta);%I_alfa*sin(teta)+I_beta*cos(teta);
erro = Id_ref-Id;
int_Wfbk = int_Wfbk+(Wfbk_n1+Wfbk)*dt/2;
int_erro = int_erro+(erro_n1+erro)*dt/2;
168
Wfbk = Ki*int_erro+Kp*erro;
ddt_teta = Wfbk+Wff;
%===================================
executa = 1;
Iq_fund = Iq;
angulo = teta;
Código Matlab para implementação da função Vh_5h do diagrama da figura A.2
function [Vh,Vout,erroaux,a,b] =
fcn(Iqh_flt,angulo,Ts,Vlim,estagio,Lcmp,Habilita,kp,ki,k2i)
% This block supports an embeddable subset of the MATLAB language.
% See the help menu for details.
%==========================================================================
persistent executa erro int_erro int_int_erro int_erro_k1 erro_k1 Vo_k1
estagio_k1
persistent Ctr_k1 Ctr_k2 erro_k2
if isempty(executa)
erro = 0;
int_erro = 0;
int_erro_k1 = 0;
int_int_erro = 0;
erro_k1 = 0;
Vo_k1 = 0;
estagio_k1 = 0;
end
%==========================================================================
% Definicação de Parâmetros
h = 5;
% Ordem do harmônico
wh = 2*pi*60*h;
% frequência do harmônico
dt = Ts;
% Passo de integração
Ih_ref = 0;
Kd = 0;
%==========================================================================
% if (estagio ~= estagio_k1)
%
int_erro = 0;
%
int_int_erro = 0;
% end
%==========================================================================
Vff = Iqh_flt*wh*Lcmp;
erro = -Ih_ref+Iqh_flt;
derro_dt = (erro-erro_k1)/Ts;
int_erro = int_erro+(erro_k1+erro)*Ts/2;
int_int_erro = int_int_erro+(int_erro_k1+int_erro)*Ts/2;
acao_integ = ki*int_erro;
acao_integ2 = k2i*int_int_erro;
if acao_integ > 3
acao_integ = 3;
169
end
if acao_integ2 > 2
acao_integ2 = 2;
end
Vh_ampl = kp*erro+acao_integ+acao_integ2-Kd*derro_dt+Vff;
% end
%==========================================================================
% Armazena estados anteriores
estagio_k1 = estagio;
erro_k1 = erro;
int_erro_k1 = int_erro;
Vo_k1 = Vh_ampl;
%==========================================================================
% Verifica se a compensasao está habilitada
if Habilita == 0
Vh_ampl = 0;
erro = 0;
int_erro = 0;
int_int_erro = 0;
end
%==========================================================================
% Limita a tensão de saída
if Vh_ampl > Vlim
% Limitação da tensão de compensação
Vh_ampl = Vlim;
elseif (Vh_ampl < -Vlim)
Vh_ampl = -Vlim;
end
%==========================================================================
% Valor instantâneo da tensão a ser sintetizada
Vh = -Vh_ampl*(sin(angulo)-0.02*cos(angulo));
%==========================================================================
% Variáveis de saída do bloco
erroaux = erro;
Vout = acao_integ;
a = int_erro;
b = int_int_erro;
%==========================================================================
executa = 1;
% Variável de controle de execução
A.3. Código C da implementação do controle do conversor na plataforma
UPCC2812.
//
//
Impedancia ativa : TMS320F2812
//
(C) Gleisson Jardim França
//
//#########################################################################
##
//
// FILE:
SFI.c
170
//
// TITLE:
DSP28 Event Manager A and B.
//
//
//#########################################################################
##
//
// Ver | dd mmm yyyy | Who | Description of changes
//
=====|=============|======|===============================================
// 1.0 | 31 Março 2011 | GJF | Fsw = 8kHz;Funcoes teste
//#########################################################################
##
#include "DSP281x_Device.h"
//extern Uint16 RamfuncsLoadStart;
//extern Uint16 RamfuncsLoadEnd;
//extern Uint16 RamfuncsRunStart;
#define
GLOBAL_Q
24
// -128 to ~ +128
long GlobalQ = GLOBAL_Q;
// Used for GEL & Graph Debug.
#include
#include
#include
#include
#define
#define
#define
#define
"math.h"
"IQmathLib.h"
"UPCC2812_DAC.h"
"UPCC2812_Peripheral.h"
Hum
_IQ(1.0)
DoisPI
_IQ(6.2831853071795864769252867665590)
DoisPIs3 _IQ(2.0943951023931954923084289221863)
PI
_IQ(3.1415926535897932384626433832795)
#define SIM
1
#define ASM
2
#define fclk
50.0e6
os timers de EVA e EVB
#define fs
10000.0 //15360.0
8k
#define K_MI
_IQ(6.4)
// frequência de clock para
// frequência do PWM/amostragem
// fundo de escala da corrente(10)
//=========================================================================
========
// Prototype statements for functions found within this file.
void dac_update(UPCC2812_DAC *p);
void Gpio_select(void);
void InitSystem(void);
void EvaInit(void);
void EvbInit(void);
void GeraRef(_iq,_iq,_iq,_iq*,_iq*);
void PLL_1f(_iq I_alfa,_iq Kp,_iq Ki,_iq Wff,_iq *theta,_iq *Iq,_iq *Id,_iq
*seno,_iq *cosseno,_iq *w);
void PLL_1f_5h(_iq I_alfa,_iq Kp,_iq Ki,_iq Wff,_iq *theta,_iq *Iq,_iq
*Id,_iq *seno,_iq *cosseno,_iq *w);
void PLL_1f_7h(_iq I_alfa,_iq Kp,_iq Ki,_iq Wff,_iq *theta,_iq *Iq,_iq
*Id,_iq *seno,_iq *cosseno,_iq *w);
void BPPWM(_iq Vdc,_iq *fa,_iq *D);
171
//=========================================================================
========
// Interrupções
interrupt void eva_timer1_isr(void);
interrupt void evb_timer3_isr(void);
interrupt void ADC_ISR(void);
//=========================================================================
========
// Global counts used in this file
Uint32 EvaTimer1InterruptCount;
Uint32 EvbTimer3InterruptCount;
Uint16 TxPR = ((Uint16) (SIM*fclk/(2*fs)));
// Período do PWM =
75e6/(2*fs) (div. por 2 - up/down mode)
//=========================================================================
========
// Global variables used in this file
UPCC2812_DAC dac = DAC_DEFAULTS;
int offset = 2047; // offset para adaptação da leitura AD
//====================================================
// Medição e filtragem das correntes do conversor
_iq Ia;
// Correntes de saída do inversor
//_iq Ib,Ic;
//====================================================
// Medição e controle do link CC
//_iq Vdc; // Tensão no link CC
//_iq Vdc_flt;//,_iq Vdc_n1,Vdc_n2,Vdc_flt_n1,Vdc_flt_n2;
// Controle de tensão no barramento CC
//_iq erro_Vdc,int_erro_Vdc =_IQ(0.0),Vdc_ref =_IQ(0.0);
//_iq Ki_Vdc = _IQ(40.0),Kp_Vdc = _IQ(20.0);
//20,15 ganhos do
controlador de tensâo do link CC
//====================================================
// Referencias de tensao
_iq Vo_ref,Vo_ref2;
// referencia de amplitude para a tensão de saída
_iq Vo_ref_mod;
// referência (forma de onda) de tensão para o modulador
//_iq fase_ref;
// referência de fase para a tensão de saída
//====================================================
// Parametros do controle de corrente
//_iq dt = _IQ(0.000125);
// passo de tempo para o controle 1/fs = Ts
(8kHz)
//_iq dts2 = _IQ(0.0000625); // passo de tempo dividido por dois (8kHz)
//_iq dt10 = _IQ(0.00125);
// passo de tempo para o controle 10/fs multiplicado por 10 para uso no PLL (8kHz)
//_iq dt100 = _IQ(0.0125);
// passo de tempo para o controle 100/fs multiplicado por 100 para uso no PLL
(8kHz)
_iq dt = _IQ(0.0001);
// passo de tempo para o controle 1/fs = Ts (10kHz)
_iq dts2 = _IQ(0.00005);
// passo de tempo dividido por dois (10kHz)
_iq dt10 = _IQ(0.001); // passo de tempo para o controle 10/fs multiplicado por 10 para uso no PLL (10kHz)
_iq dt100 = _IQ(0.01); // passo de tempo para o controle 100/fs multiplicado por 100 para uso no PLL
(10kHz)
//=========================================================================
========
// Variáveis do PLL
_iq seno,cosseno,seno_5h,cosseno_5h,seno_7h,cosseno_7h;
_iq theta = 0,theta_5h = 0,theta_7h = 0;
_iq fa = 0,fa5h = 0,fa7h = 0; //_iq theta_teste = 0
172
_iq theta_teste = 0;_iq theta_teste5h = 0;_iq theta_teste7h = 0;
_iq WeTs,WeTs5h,WeTs7h; // passo angular = We*Ts (Ts - intervalo de
amostragem 1/fs)
_iq wff = _IQ(37.699111843077518861551720599354);
// wff dividido por
10 para manter I8Q24
_iq wff_5h = _IQ(94.247779607693797153879301498385);// wff5h dividido por
20 para manter I8Q24
_iq wff_7h = _IQ(65.97344572538565800771551104885);
// wff7h dividido por
40 para manter I8Q24
_iq w = 0,w_5h = 0,w_7h = 0;
// frequencia angular calculada
pelo PLL sem parcela wff
_iq Kp = _IQ(2.56);
// Kp do controlador PLL freq. fundamental
_iq Ki = _IQ(0.128);
// Ki do controlador PLL freq. fundamental
_iq Kp_h = _IQ(30);
// Kp do controlador PLL freq. harmônica
_iq Ki_h = _IQ(2);
// Ki do controlador PLL freq. harmônica
_iq Id = 0,Iq = 0,Iq_ref = 0,Iq_5h = 0,Id_5h = 0,Iq_7h = 0,Id_7h = 0;
_iq Ia_f;
// Estimativa para a corrente fundamental
_iq Ia_5h;
// Estimativa para a quinta harmonica
_iq Ia_7h;
// Estimativa para a sétima harmonica
_iq Iq_flt,Iq_flt_n1,Iq_flt_n2,Iq_n1,Iq_n2; // sufixo _n1 = variavel no
instante (k-1)
// sufixo _n2 = variavel no
instante (k-2)
//_iq
Iq_flt,Iq_flt_n1,Iq_flt_n2,Iq_flt_n3,Iq_flt_n4,Iq_n1,Iq_n2,Iq_n3,Iq_n4;
_iq Iq_5h_flt,Iq_5h_flt_n1,Iq_5h_flt_n2,Iq_5h_n1,Iq_5h_n2;
_iq Iq_7h_flt,Iq_7h_flt_n1,Iq_7h_flt_n2,Iq_7h_n1,Iq_7h_n2;
//=========================================================================
========
// Variaveis associadas a determinação dos offsets da leitura de corrente
_iq soma_Ia = 0,off_Ia = 0;
int N = 32000,j = 0,protecao = 0; // número de pontos amostrados em um
período de rede
// com fs = 8 kHz
_iq sN = _IQ(0.00003125);
// 1/N
//=========================================================================
========
// Coeficientes do filtro das correntes
//_iq A_I[2] = {_IQ(1.0), _IQ(-0.9919)};
//_iq B_I[2] = {_IQ(0.041), _IQ(0.0041)};
// Coeficientes do filtro das tensões de rede geradas pelo PLL
_iq A_Vr[2] = {_IQ(1.0), _IQ(-0.9959)};
_iq B_Vr[2] = {_IQ(0.0020), _IQ(0.0020)};
//_iq A_Vr[5] = {_IQ(0.171970792504847),_IQ(0.677163983217458),_IQ(1.0),_IQ(0.656385203465571),_IQ(0.161578445429471)};
//_iq B_Vr[5] =
{_IQ(0.028661802167561),_IQ(0.114647198419984),_IQ(0.171970792504847),_IQ(0
.114647198419984),_IQ(0.028661802167561)};
// fim - Variaveis - filtro
//=========================================================================
========
// Variaveis associadas a geração de referência e modulador PWM
_iq D;
// Razão cíclica
_iq Vr_CMPR;
// Valor a ser utilizado na comparação PWM: (TxPR-Vr_CMPR)
int Habilita_geral = 1;
173
int count = 0;
//=========================================================================
========
void main(void)
{
inicio_do_programa:
asm(" SETC SXM");
InitSystem();
// Initialize the DSP's core Registers
//
memcpy(&RamfuncsRunStart,&RamfuncsLoadStart,&RamfuncsLoadEnd &RamfuncsLoadStart);
//
InitFlash();
// Initialize the Flash; Call original
function from "DSP281x_SysCtrl.c"
Gpio_select();
DINT;
// Setup the GPIO Multiplex Registers
// Disable CPU interrupts
InitPieCtrl();
// Clear all pending PIE-Interrupts and
// disable all PIE interrupt lines.
// Disable CPU interrupts and clear all CPU interrupt flags:
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
"PieVectTableInit()"
// Copies a predefined interrupt table
// to the global variable "PieVectTable",
defined
// in "DSP281x_GlobalVariableDefs.c".
InitAdc();
// ADC module inicialization - Lyra_29/09/08
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this file.
EALLOW; // This is needed to write to EALLOW protected registers
GpioMuxRegs.GPADIR.bit.GPIOA15 = 1;
PieVectTable.T1UFINT = &eva_timer1_isr;
PieVectTable.T3UFINT = &evb_timer3_isr;
PieVectTable.ADCINT = &ADC_ISR;
EDIS;
registers
// This is needed to disable write to EALLOW protected
PieCtrlRegs.PIEIER1.bit.INTx6 = 1;
- for ADC
PieCtrlRegs.PIEIER2.bit.INTx6 = 1;
for T1UFINT
PieCtrlRegs.PIEIER4.bit.INTx6 = 0;
for T3UFINT
// Enable PIE group 1 interrupt 6
IER = 3; // |= (M_INT2 | M_INT4 );
(INT1). Modify register IER
// Enable interrupt core line 1
EINT;
ERTM;
// Enable PIE group 2 interrupt 6
// Enable PIE group 4 interrupt 6
// Enable interrupts globally.
// Enable Global realtime interrupt DBGM
EvaInit();
EvbInit();
// Event Manager Initialization
EvaTimer1InterruptCount = 0;
// Initialize count values to 0
174
EvbTimer3InterruptCount = 0;
EvaRegs.T1CON.bit.TENABLE = 1;
EvaRegs.T1CON.bit.TENABLE = 1
EvbRegs.T3CON.bit.TENABLE = 1;
EvbRegs.T3CON.bit.TENABLE = 1
// Enable T1PWM, set
// Enable T1PWM, set
//=========================================================================
========
// Initialize Global Variables
//
//
fe = fenom;
WeTs = _IQ(0.047123889803846898576939650749193); //fs = 8000Hz
WeTs = _IQ(0.037699111843077518861551720599354); //fs = 10kHz
WeTs5h =
_IQ(0.23561944901923449288469825374596);//_IQ((DoisPI*(fe/fs))); 8000Hz
WeTs5h =
_IQ(0.18849555921538759430775860299677);//_IQ((DoisPI*(fe/fs))); 10kHz
//
WeTs7h =
_IQ(0.329867228626928290038577555243);//_IQ((DoisPI*(fe/fs))); 8kHz
WeTs7h =
_IQ(0.2638937829015426320308620441944);//_IQ((DoisPI*(fe/fs))); 10kHz
//=========================================================================
========
// Sincronizando os contadores
EvaRegs.T1CNT = 0x0000;
EvbRegs.T3CNT = 0x0001;
//=========================================================================
========
/*---------------------------------------------------------------------------*/
while(1)
{
EALLOW;
SysCtrlRegs.WDKEY = 0x55;
// Reset Watchdog.
if ((Habilita_geral == 0)&(primeira==1))
{
primeira = 1;///0
goto inicio_do_programa;
}
SysCtrlRegs.WDKEY = 0xAA;
// Restart Watchdog.
//
//
//
//
//
//
EDIS;
}
/*---------------------------------------------------------------------------*/
}
void Gpio_select(void)
{
EALLOW;
GpioMuxRegs.GPAMUX.all
GpioMuxRegs.GPBMUX.all
GpioMuxRegs.GPDMUX.all
GpioMuxRegs.GPFMUX.all
=
=
=
=
0x003F;
0x003F;
0x0;
0x0;
// all GPIO port Pin's to I/O
175
GpioMuxRegs.GPEMUX.all = 0x0;
GpioMuxRegs.GPGMUX.all = 0x0;
EDIS;
}
void InitSystem(void)
{
EALLOW;
SysCtrlRegs.WDCR= 0x00AF;//0x0068; // Setup the watchdog
SysCtrlRegs.PLLCR.bit.DIV = 10;
// Setup the Clock PLL to
multiply by 5 (10/2) - CLKIN = 30MHz -> 150MHz internal clock
SysCtrlRegs.SCSR = 0x0;
// Watchdog(WDENINT)to generate a
RESET
SysCtrlRegs.HISPCP.all = 0x0001;
// Setup Highspeed Clock
Prescaler to divide by 2 (used for high speed peripherals) - 75MHz
SysCtrlRegs.LOSPCP.all = 0x0002;
// Setup Lowspeed CLock Prescaler
to divide by 4 (used for low speed peripherals)
// Peripheral clock enables set for the selected peripherals.
SysCtrlRegs.PCLKCR.bit.EVAENCLK=1;
SysCtrlRegs.PCLKCR.bit.EVBENCLK=1;
SysCtrlRegs.PCLKCR.bit.SCIAENCLK=0;
SysCtrlRegs.PCLKCR.bit.SCIBENCLK=0;
SysCtrlRegs.PCLKCR.bit.MCBSPENCLK=0;
SysCtrlRegs.PCLKCR.bit.SPIENCLK=0;
SysCtrlRegs.PCLKCR.bit.ECANENCLK=0;
SysCtrlRegs.PCLKCR.bit.ADCENCLK=1;
EDIS;
}
void EvaInit(void)
{
// Configure EVA
// Assumes EVA Clock is already enabled in InitSysCtrl();
// Drive T1PWM / T2PWM by T1/T2 - logic
//0000.0000.0100.0001 - Habilita
EvaRegs.GPTCONA.all = 0x41;
comparadores(bit 6)
//Pinos T1PWM e T1CMP em "forced high"
//Pinos T2PWM e T2CMP em
"forced low"
EvaRegs.T1CON.bit.FREE = 0;
// Stop on emulation suspend
EvaRegs.T1CON.bit.SOFT = 0;
// Stop on emulation suspend
EvaRegs.T1CON.bit.TMODE = SIM;
// Continuous up/down count mode
EvaRegs.T1CON.bit.TPS = 0;
// prescaler = 1 : 75 MHz (prescaler
com relação ao high speed peripheral clock)
EvaRegs.T1CON.bit.TENABLE = 0;
// disable GP Timer 1 now
EvaRegs.T1CON.bit.TCLKS10 = 0;
// internal clock
EvaRegs.T1CON.bit.TCLD10 = 0; // Compare Reload when zero
EvaRegs.T1CON.bit.TECMPR = 1; // Enable Compare operation
EvaRegs.T1PR = TxPR;
EvaRegs.T1CNT = 0x0000;
// período do PWM -> 1/fs
// Timer1 counter initialization
EvaRegs.EVAIMRA.bit.T1UFINT = 1;// Habilita geração de interrupção
quado Timer1 = underflow
176
EvaRegs.ACTRA.all = 0x0666;
// Compare action
takes place on a compare event 0000.0110.0110.0110
// output pin 1 CMPR1 // output pin 2 CMPR1 // output pin 3 CMPR2 // output pin 4 CMPR2 // output pin 5 CMPR3 // output pin 6 CMPR3 -
control.
Action that
active high (PWM1)
active low (PWM2)
active high (PWM3)
active low (PWM4)
active high (PWM5)
ative low (PWM6)
EvaRegs.DBTCONA.all = 0x0CF4; // Deadband - clock derivado do high
speed peripheral clok (após HISPCP)
// 0x0CF4 = 0000.1100.1111.0100
// período = 12*1/75MHz*prescaler= 5,12us
(bits 8 a 11)
// PWM1, 2 e 3 com deadband (bits 5 a 7)
// prescaler = 32 (bitts 2 a 4)
EvaRegs.COMCONA.all = 0x8200; // 0x8200 = 1000.0010.0000.0000
// bit 15 - habilita comparação
// bits 14 e 13 - reload when T1CNT=0
(compare registers)
// bits 11 e 10 - reload when T1CNT=0 (action
control registers)
// bit 9 - Habilita as saídas dos
comparadores (com EXTCONA[0]=0;
}
void EvbInit(void)
{
// Configure EVB
// Assumes EVB Clock is already enabled in InitSysCtrl();
// Drive T3PWM / T4PWM by T3/T4 - logic
EvbRegs.GPTCONB.all = 0x41;
EvbRegs.T3CON.bit.FREE = 0;
//
EvbRegs.T3CON.bit.SOFT = 0;
//
EvbRegs.T3CON.bit.TMODE = SIM;
EvbRegs.T3CON.bit.TPS = 0;
//
EvbRegs.T3CON.bit.TENABLE = 0;
EvbRegs.T3CON.bit.TCLKS10 = 0;
EvbRegs.T3CON.bit.TCLD10 = 0; //
EvbRegs.T3CON.bit.TECMPR = 1; //
EvbRegs.T3PR = TxPR;
EvbRegs.T3CNT = 0x0000;
Stop on emulation suspend
Stop on emulation suspend
// Continuous up/down count mode
prescaler = 1 : 75 MHz
// disable GP Timer 1 now
// internal clock
Compare Reload when zero
Enable Compare operation
// Período do PWM
// Inicialização do Timer3 counter
EvbRegs.EVBIMRA.bit.T3UFINT = 1;
// Compare action control. Action that takes place
// on a cmpare event
// output pin 1 CMPR1 - active high
// output pin 2 CMPR1 - active low
// output pin 3 CMPR2 - active high
// output pin 4 CMPR2 - active low
// output pin 5 CMPR3 - active high
// output pin 6 CMPR3 - active low
EvbRegs.ACTRB.all = 0x0666;//0x0666;//
EvbRegs.DBTCONB.all = 0x0000;//0x0CF4; // Deadband
EvbRegs.COMCONB.all = 0x8200;
177
}
void dac_update(UPCC2812_DAC *p)
{
DACA0 = p->A.ch0 + p->A.offset_ch0;
DACA1 = p->A.ch1 + p->A.offset_ch1;
DACA2 = p->A.ch2 + p->A.offset_ch2;
DACA3 = p->A.ch3 + p->A.offset_ch3;
DACB0
DACB1
DACB2
DACB3
=
=
=
=
p->B.ch0
p->B.ch1
p->B.ch2
p->B.ch3
+
+
+
+
p->B.offset_ch0;
p->B.offset_ch1;
p->B.offset_ch2;
p->B.offset_ch3;
}
interrupt void ADC_ISR(void)
{
// 0x000D4A
ADCINT (ADC)
/*** Manage the ADC registers ***/
AdcRegs.ADCTRL2.bit.RST_SEQ1 = 1;
CONV00 state
AdcRegs.ADCST.bit.INT_SEQ1_CLR = 1;
interrupt flag
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
the PIE group
} // end ADCINT_ISR()
// Reset SEQ1 to
// Clear ADC SEQ1
// Must acknowledge
void eva_timer1_isr(void)
{
DOUT0 = 0;
interrupção
// utilizado para medicao do tempo de processamento da
AdcRegs.ADCTRL2.all |= BIT14; // reset to CONV0 14/11/2008
AdcRegs.ADCTRL2.all |= BIT13; // inicialização da conversão AD
14/11/2008
/** Manage the ADC registers ***/
//========================================================
// Leituras das correntes de saída 1A na entrada = 1A representação interna
//Ia = _IQmpy(_Q15toIQ((int)((AdcRegs.ADCRESULT0 >> 4) - offset) <<
4),K_MI); // convertido para amperes
//
//
//if (Habilita_geral==0)
//{
Ia = Ia-off_Ia; // compensação de offset analógico
}
//if (Ia>30)
//{
//protecao = 1;
//}
//
Ib = _IQmpy(_Q15toIQ((int)((AdcRegs.ADCRESULT1
4),K_MI); // convertido para amperes
//
Ib = Ib+_IQ(1.30);
>> 4) - offset) <<
178
//
Ic = _IQmpy(_Q15toIQ((int)((AdcRegs.ADCRESULT2 >> 4) - offset) <<
4),Ipk); // convertido para amperes
//
Ic = Ic-_IQ(1.15);
//
Ic = -Ia-Ib;
///========================================================
// Leituras das tensões no link DC
//
Vdc = _Q15toIQ((int)((AdcRegs.ADCRESULT3 >> 4)-offset) << 4);
//========================================================
// Filtragem da tensao do link CC
//
Vdc_flt = _IQmpy(Vdc,B_Vr[0])+_IQmpy(Vdc_n1,B_Vr[1])//
_IQmpy(Vdc_flt_n1,A_Vr[1]);
//
Vdc_n2 = Vdc_n1;
//
Vdc_n1 = Vdc;
//
Vdc_flt_n2 = Vdc_flt_n1;
//
Vdc_flt_n1 = Vdc_flt;
//=========================================================================
========
// Leitura da referência de fase da tensão de saída
//
fase_ref = _Q15toIQ((int)( ( (AdcRegs.ADCRESULT7 >> 4) - offset) <<
4)); // Leitura de potênciometro externo
//
fase_ref = _IQmpy(fase_ref,_IQ(17.5))-PI; // Normalização: PI/2<fase<PI/2
//=========================================================================
========
Vo_ref2 = _Q15toIQ((int)( ( (AdcRegs.ADCRESULT7 >> 4) - offset) <<
4))+_IQ(0.06459453);//correção associada a offset analógico incorreto
Vo_ref2 = _IQmpy(Vo_ref2,_IQ(2.32)); // Normalização (Vo_ref max =
1.0 pu)
// Leitura da referência de amplitude para a tensão de saída
Vo_ref = _Q15toIQ((int)( ( (AdcRegs.ADCRESULT4 >> 4) - offset) <<
4))+_IQ(0.06459453);//correção associada a offset analógico incorreto
Vo_ref = _IQmpy(Vo_ref,_IQ(2.32)); // Normalização (Vo_ref max = 1.0
pu)
//
Vo_ref = _IQ(1.0);
// Saturação da referência de tensão (para Vdc = 311V -> vo max = 220*0.5 =
110Vrms
//
if (Vo_ref>_IQ(1.0))
//
{
//
Vo_ref = _IQ(1.0);
//
}
GeraRef(Vo_ref,WeTs,PI,&theta_teste,&fa);
GeraRef(Vo_ref2,WeTs5h,PI,&theta_teste5h,&fa5h);
GeraRef(Vo_ref2,WeTs7h,PI,&theta_teste7h,&fa7h);
Ia = fa+fa5h+fa7h;
//========================================================
// Leituras da tensão de linha - 311V - entrada - 0,5 representação interna
//
Vab = _Q15toIQ((int)(((AdcRegs.ADCRESULT5 >> 4) - offset) << 4));
//
Vbc = _Q15toIQ((int)(((AdcRegs.ADCRESULT6 >> 4) - offset) << 4)); //
86 - offset devido ao offset analógico incorreto
//
if (Habilita_geral==0)
//
{
//
Vab = Vab-off_Vab; // compensação de offset analógico
//
Vbc = Vbc-off_Vbc; // compensação de offset analógico
//
}
//========================================================
// Estimativas para cada componente
Ia_f = _IQmpy(Iq_flt,cosseno);
Ia_5h = _IQmpy(Iq_5h_flt,cosseno_5h);
Ia_7h = _IQmpy(Iq_7h_flt,cosseno_7h);
179
//========================================================
// PLL - frequência fundamental
PLL_1f(Ia-Ia_5h-Ia_7h,Kp,Ki,wff,&theta,&Iq,&Id,&seno,&cosseno,&w);//fa
//========================================================
// Filtragem da corrente fundamental no referencial síncrono
Iq_flt = _IQmpy(Iq,B_Vr[0])+_IQmpy(Iq_n1,B_Vr[1])_IQmpy(Iq_flt_n1,A_Vr[1]);
//
Iq_flt =
_IQmpy(Iq,B_Vr[0])+_IQmpy(Iq_n1,B_Vr[1])+_IQmpy(Iq_n2,B_Vr[2])+_IQmpy(Iq_n3
,B_Vr[3])+_IQmpy(Iq_n4,B_Vr[4])//
_IQmpy(Iq_flt_n1,A_Vr[1])-_IQmpy(Iq_flt_n2,A_Vr[2])_IQmpy(Iq_flt_n3,A_Vr[3])-_IQmpy(Iq_flt_n4,A_Vr[4]);
//
Iq_n4 = Iq_n3;
//
Iq_n3 = Iq_n2;
//
Iq_n2 = Iq_n1;
Iq_n1 = Iq;
//
Iq_flt_n4 = Iq_flt_n3;
//
Iq_flt_n3 = Iq_flt_n2;
//
Iq_flt_n2 = Iq_flt_n1;
Iq_flt_n1 = Iq_flt;
// OBS O filtro está apresentando ganho de 3,6
//========================================================
// PLL - frequência de quinto harmônico
PLL_1f_5h(Ia-Ia_fIa_7h,Kp_h,Ki_h,wff_5h,&theta_5h,&Iq_5h,&Id_5h,&seno_5h,&cosseno_5h,&w_5h);
//========================================================
// Filtragem da corrente harmônica no referencial síncrono
Iq_5h_flt = _IQmpy(Iq_5h,B_Vr[0])+_IQmpy(Iq_5h_n1,B_Vr[1])_IQmpy(Iq_5h_flt_n1,A_Vr[1]);
//
Iq_5h_n2 = Iq_5h_n1;
Iq_5h_n1 = Iq_5h;
//
Iq_5h_flt_n2 = Iq_5h_flt_n1;
Iq_5h_flt_n1 = Iq_5h_flt;
//========================================================
// PLL - frequência de sétimo harmônico
PLL_1f_7h(Ia-Ia_fIa_5h,Kp_h,Ki_h,wff_7h,&theta_7h,&Iq_7h,&Id_7h,&seno_7h,&cosseno_7h,&w_7h);
//========================================================
// Filtragem da corrente harmônica no referencial síncrono
Iq_7h_flt = _IQmpy(Iq_7h,B_Vr[0])+_IQmpy(Iq_7h_n1,B_Vr[1])_IQmpy(Iq_7h_flt_n1,A_Vr[1]);
//
Iq_7h_n2 = Iq_7h_n1;
Iq_7h_n1 = Iq_7h;
//
Iq_7h_flt_n2 = Iq_7h_flt_n1;
Iq_7h_flt_n1 = Iq_7h_flt;
//========================================================
// Geração da tensão de referência para o modulador
Vo_ref_mod = -_IQmpy(_IQmpy(_IQmpy(Iq_5h_flt,_IQ(1.0)),seno_5h)_IQmpy(_IQmpy(Iq_7h_flt,_IQ(0.05)),seno_7h),Vo_ref);
//Vo_ref_mod = -_IQmpy(Vo_ref,seno_5h)-_IQmpy(Vo_ref2,seno_7h);
//========================================================
// Controle da tensão do Link CC
//
Vdc_ref = _IQmpy(Vq_flt,_IQ(3.1617));//3.81
//
erro_Vdc = _IQmpy(Vdc_flt-Vdc_ref,Dez);
//
PI_Controller(Ki_Vdc,Kp_Vdc,erro_VDC,&int_erro_VDC,dt,&Iq_ref,_IQ(0.0
),Ipk,-Ipk);
//========================================================
180
EvaTimer1InterruptCount++;
//
EvaRegs.EVAIFRA.all = BIT9;
//========================================================
// Mostra sinais nas saídas analógicas
dac.A.ch0 = _IQtoQ8(Iq_flt);
dac.A.ch1 = _IQtoQ8(Iq_5h_flt);
dac.A.ch2 = _IQtoQ8(Iq_7h_flt);
dac.A.ch3 = _IQtoQ8(Iq_flt);
dac.update(&dac);
//========================================================
// Determinação dos offsets nas leituras das tensões de linha
//if (protecao==0)
//{
//
Habilita_geral = DIN0; // leitura de entrada digital DIN0:
// 1 - PWM desligado e executa calculo dos
offsets
// 0 - PWM habilitado
//}
//else
//{
//
Habilita_geral = 1;
//}
if (Habilita_geral==1)
{
EvaRegs.COMCONA.all = 0x0;
// Desabilita comparação (0x8200
= 1000.0010.0000.0000)
if (j==N)
{
off_Ia = _IQmpy(soma_Ia,sN);
Habilita_geral = 0;
j = 0;
soma_Ia = 0;
EvaRegs.COMCONA.all = 0x8200; // 0x8200 =
1000.0010.0000.0000
//Ia_pk = 0;
}
else
{
j++;
soma_Ia = soma_Ia+Ia;
//if ((Ia)>Ia_pk) Ia_pk = (Ia);
}
}
else
{
//
BPPWM(Vdc_flt,&Vo_ref_mod,&D);
// Executa modulador PWM
BPPWM(Hum,&Vo_ref_mod,&D);
// Executa modulador PWM
}
//========================================================
EALLOW;
SysCtrlRegs.WDKEY = 0x55;
// Reset Watchdog.
EDIS;
181
PieCtrlRegs.PIEACK.all = PIEACK_GROUP2;
DOUT0 = 1;
// Note: To be safe, use a mask value to write to the entire
// EVAIFRA register. Writing to one bit will cause a read-modifywrite
// operation that may have the result of writing 1's to clear
// bits other then those intended.
EvaRegs.EVAIFRA.all = BIT9;
}
void GeraRef(_iq Vo_ref,_iq WeTs,_iq fase,_iq *theta,_iq *fa)
{
_iq falfa;
*theta = *theta+WeTs;
if (*theta > PI)
{
*theta = *theta-DoisPI;
}
else if (*theta < -PI)
{
*theta = *theta+DoisPI;
}
falfa = _IQmpy(_IQ(sin(_IQtoF(*theta+fase))),Vo_ref);
*fa = falfa;
}
void evb_timer3_isr(void)
{
EvbTimer3InterruptCount++;
EvbRegs.EVBIMRA.bit.T3UFINT = 1;
// Note: To be safe, use a mask value to write to the entire
// EVBIFRA register. Writing to one bit will cause a read-modify-write
// operation that may have the result of writing 1's to clear
// bits other then those intended.
EvbRegs.EVBIFRA.all = BIT9;
//
//
//
EALLOW;
SysCtrlRegs.WDKEY = 0x55;
EDIS;
// Reset Watchdog.
PieCtrlRegs.PIEACK.all = PIEACK_GROUP4;
}
// --------------------------------------------------------------------------void BPPWM(_iq Vdc,_iq *fa,_iq *D)
182
{
_iq Vdc_min = _IQ(0.1);
if (Vdc<Vdc_min)
{
Vdc = Vdc_min;
}
*D = *fa;//_IQdiv(*fa,Vdc);
if (*D>=0)
{
Vr_CMPR = _IQmpy(*D,EvaRegs.T1PR);
EvaRegs.CMPR1 = ((Uint16) (_IQsat((EvaRegs.T1PRVr_CMPR),EvaRegs.T1PR,0))); // PWM1 and PWM2 => S1 and S2
EvaRegs.CMPR2 = EvaRegs.T1PR;
// PWM3 and PWM4 =>
S3 and S4
}
else
{
Vr_CMPR = _IQmpy(_IQabs(*D),EvaRegs.T1PR);
EvaRegs.CMPR1 = EvaRegs.T1PR; // PWM1 and PWM2 => S1 and S2
EvaRegs.CMPR2 = ((Uint16) (_IQsat((EvaRegs.T1PRVr_CMPR),EvaRegs.T1PR,0))); // PWM3 and PWM4 => S3 and S4
}
EvaRegs.CMPR3 = EvaRegs.CMPR2;
S6 and S6 - nâo serão utiizadas
}
// PWM3
and PWM4
=>
void PLL_1f(_iq I_alfa,_iq Kp,_iq Ki,_iq Wff,_iq *theta,_iq *Iq,_iq *Id,_iq
*seno,_iq *cosseno,_iq *w)
{
static _iq Iq_ref = 0,erro_Id = 0,int_erro_Id = 0,I_beta=0;
_iq um_s_tau = _IQ(100),K = Hum,Id_ref = 0,erro_Id_n1,dIq_dt = 0;
*theta = *theta+_IQmpy((*w+Wff),dt10);
// theta = theta+ddt_theta*dt
if (*theta > PI)
{
*theta = *theta-DoisPI;
}
else if (*theta < -PI)
{
*theta = *theta+DoisPI;
}
*seno = _IQ(sin(_IQtoF(*theta)));//_IQsin(*theta);
*cosseno = _IQ(cos(_IQtoF(*theta)));//_IQcos(*theta);
I_beta = _IQmpy(Iq_ref,*seno); //-Iq_ref*sin(teta);
*Iq = _IQmpy(I_alfa,*cosseno)+_IQmpy(I_beta,*seno);
dIq_dt = _IQmpy((um_s_tau),(_IQmpy(K,*Iq)-Iq_ref));
Iq_ref = Iq_ref+_IQmpy(dIq_dt,dt10);
*Id = _IQmpy(I_alfa,*seno)-_IQmpy(I_beta,*cosseno);//
I_alfa*sin(teta)+I_beta*cos(teta);
erro_Id_n1 = erro_Id;
erro_Id = Id_ref-*Id;
int_erro_Id = int_erro_Id+_IQmpy((erro_Id_n1+erro_Id),dts2);
183
*w = _IQmpy(Ki,int_erro_Id)+_IQmpy(Kp,erro_Id);
}
void PLL_1f_5h(_iq I_alfa,_iq Kp,_iq Ki,_iq Wff,_iq *theta,_iq *Iq,_iq
*Id,_iq *seno,_iq *cosseno,_iq *w)
{
static _iq Iq_ref = 0,erro_Id = 0,int_erro_Id = 0,I_beta=0;
_iq um_s_tau = _IQ(50),K = Hum,Id_ref = 0,erro_Id_n1,dIq_dt = 0;
*theta = *theta+_IQmpy(*w,dt10)+(_IQmpy(Wff,dt10)<<1);
theta+ddt_theta*dt
if (*theta > PI)
{
*theta = *theta-DoisPI;
}
else if (*theta < -PI)
{
*theta = *theta+DoisPI;
}
// theta =
*seno = _IQ(sin(_IQtoF(*theta)));//_IQsin(*theta);
*cosseno = _IQ(cos(_IQtoF(*theta)));//_IQcos(*theta);
I_beta = _IQmpy(Iq_ref,*seno); //-Iq_ref*sin(teta);
*Iq = _IQmpy(I_alfa,*cosseno)+_IQmpy(I_beta,*seno);
dIq_dt = _IQmpy((um_s_tau),(_IQmpy(K,*Iq)-Iq_ref));
//dIq_dt = _IQmpy(_IQmpy((um_s_tau),(_IQmpy(K,*Iq)-Iq_ref)),_IQ(100));
Iq_ref = Iq_ref+_IQmpy(dIq_dt,dt100);
*Id = _IQmpy(I_alfa,*seno)-_IQmpy(I_beta,*cosseno);//
I_alfa*sin(teta)+I_beta*cos(teta);
erro_Id_n1 = erro_Id;
erro_Id = Id_ref-*Id;
int_erro_Id = int_erro_Id+_IQmpy((erro_Id_n1+erro_Id),dts2);
*w = _IQmpy(Ki,int_erro_Id)+_IQmpy(Kp,erro_Id);
}
void PLL_1f_7h(_iq I_alfa,_iq Kp,_iq Ki,_iq Wff,_iq *theta,_iq *Iq,_iq
*Id,_iq *seno,_iq *cosseno,_iq *w)
{
static _iq Iq_ref = 0,erro_Id = 0,int_erro_Id = 0,I_beta=0;
_iq um_s_tau = _IQ(50),K = Hum,Id_ref = 0,erro_Id_n1,dIq_dt = 0;
*theta = *theta+_IQmpy(*w,dt10)+(_IQmpy(Wff,dt10)<<2);
theta+ddt_theta*dt
if (*theta > PI)
{
*theta = *theta-DoisPI;
}
else if (*theta < -PI)
{
*theta = *theta+DoisPI;
}
*seno = _IQ(sin(_IQtoF(*theta)));//_IQsin(*theta);
*cosseno = _IQ(cos(_IQtoF(*theta)));//_IQcos(*theta);
// theta =
184
I_beta = _IQmpy(Iq_ref,*seno); //-Iq_ref*sin(teta);
*Iq = _IQmpy(I_alfa,*cosseno)+_IQmpy(I_beta,*seno);
dIq_dt = _IQmpy((um_s_tau),(_IQmpy(K,*Iq)-Iq_ref));
//dIq_dt = _IQmpy(_IQmpy((um_s_tau),(_IQmpy(K,*Iq)-Iq_ref)),_IQ(100));
Iq_ref = Iq_ref+_IQmpy(dIq_dt,dt100);
*Id = _IQmpy(I_alfa,*seno)-_IQmpy(I_beta,*cosseno);//
I_alfa*sin(teta)+I_beta*cos(teta);
erro_Id_n1 = erro_Id;
erro_Id = Id_ref-*Id;
int_erro_Id = int_erro_Id+_IQmpy((erro_Id_n1+erro_Id),dts2);
*w = _IQmpy(Ki,int_erro_Id)+_IQmpy(Kp,erro_Id);
}
Download